practica41.pdf
12
Universidad Nacional de San Juan - Facultad de Ingeniería DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA Carrera: Bioingeniería Área CONTROL Asignatura: CONTROL I GUI A A D DE A APR RENDI Z Z A AJ JE Y Y A AUTOEV VA AL LUA ACI O ON UNIDAD DE APRENDIZAJE Nº 2 “REPRESENTACIÓN MATEMÁTICA DE SISTEMAS LINEALES AUTÓNOMOS” PRÁCTICO Nº 4 “DIAGRAMA DE FLUJO”
Transcript of practica41.pdf
7/16/2019 practica41.pdf
http://slidepdf.com/reader/full/practica41pdf-568bd34c0f770 1/12
Universidad Nacional de San Juan - Facultad de IngenieríaDEPARTAMENTO DE ELECTRONICA Y AUTOMATICA
Carrera: BioingenieríaÁrea CONTROL
Asignatura: CONTROL I
GGUUIIAA DDEE AAPPRREENNDDIIZZAAJJEE Y Y AAUUTTOOEEVVAALLUUAACCIIOONN
UNIDAD DE APRENDIZAJE Nº 2
“REPRESENTACIÓN MATEMÁTICA DE SISTEMAS LINEALESAUTÓNOMOS”
PRÁCTICO Nº 4
“DIAGRAMA DE FLUJO”

7/16/2019 practica41.pdf
http://slidepdf.com/reader/full/practica41pdf-568bd34c0f770 2/12
Unidad Nº 2 Práctico Nº 4
1
PRACTICO Nº 4
Nota: Los apartados referentes a 1-Objetivos Generales, 2-Objetivosespecíficos, 3-Contenidos, 4–Diagrama de Bloque ya han sido
enunciados en el Practico Nº 2, que es el primer práctico correspondientea la Unidad Nº 2. Por lo tanto al igual que el práctico 3, se comenzará desde las actividadesa realizar por el alumno.
5. ACTIVIDADES A DESARROLLAR POR EL ALUMNO:
1- Asistir a seis clases semanales teóricas-prácticas tipo conferencias de
45 minutos para aprender los contenidos expuestos
2 -Leer y comprender en la bibliografía y en los apuntes tomados en claselos temas indicados en los contenidos referente a la Unidad de Aprendizaje Nº2.
3- Realizar la actividad de autoevaluación y los ejercicios indicados en laguía de aprendizaje del Práctico Nº 4
4- (una) clase de 135 minutos para evaluar la unidad.
5.1 ACTIVIDADES DE AUTOEVALUACIÓN
Responder a las siguientes aseveraciones con "si" o "no".
a)- Un conjunto de ecuaciones integro-diferenciales lineales puede serrepresentado por un diagrama de flujo señal.
b)- Un nudo fuente representa en un diagrama de flujo señal a lavariable de entrada de un sistema.
c)- La transmitancia de una rama es la relación entre las dos variablesvinculadas por la misma.
7/16/2019 practica41.pdf
http://slidepdf.com/reader/full/practica41pdf-568bd34c0f770 3/12
Unidad Nº 2 Práctico Nº 4
2
d)- Sólo en el caso de sistemas automáticos de control la transmitanciaes una función de transferencia.
e)- Un diagrama de flujo señal puede ser reducido en forma análoga alos diagramas de bloque.
f)- Son lazos no adjuntos aquellos que no tienen ninguna rama encomún.
g)- Un sistema de una sola entrada representado por un diagrama deflujo señal sólo tiene un trayecto directo.
h)- Dado un diagrama de flujo señal cualquier nudo mixto puede serconvertido en nudo de salida.
i)- La fórmula de Mason permite hallar la relación existente entre unavariable de entrada y una variable de salida.
j)- Sólo en el caso de los sistemas de control esta relación es lafunción de transferencia.
k)- Un nudo de un diagrama de flujo señal es equivalente a una flecha
que entra o sale de un bloque.
l)- Dado un sistema sólo es posible representarlo por un únicodiagrama de flujo señal.
m)- Si se multiplica por menos uno la ganancia de una rama, estoequivale a invertir el sentido de la rama.
n)- Si un sistema lineal de múltiples entradas y salidas se representa
por un diagrama de flujo señal, usando el teorema de superposicióny la fórmula de Mason se pueden obtener los valores de las salidas.

7/16/2019 practica41.pdf
http://slidepdf.com/reader/full/practica41pdf-568bd34c0f770 4/12
Unidad Nº 2 Práctico Nº 4
3
5.2- EJERCICIOS
Ejercicio Nº 1: Considerar las ecuaciones del apartado a) y b) en las que
las xi son variables y las Ai son constantes y representarlos mediante undiagrama de flujo señal usando el mínimo número de ramas posibles:
a) 522113
−+= x A x A x
b) ( )
2
2
2
3
21
2
1
2
4
)(3.1
)(5
)(
dt
xd x
dt
dx
dt
dx
dt
xd x +−++=
c) Representar las siguientes ecuaciones simultáneas mediante undiagrama de flujo señal:
4443434
3332323
4243232221212
3131111
X A X A X
X A X A X
X A X A X A X A X
BU X A X A X
+=
+=
+++=
++=
Ejercicio Nº 2: A partir del diagrama de flujo señal dibujado, determinar lasecuaciones representadas:
Ejercicio Nº 3: La figura muestra un dispositivo transductor que permitegobernar un potenciómetro por medio de una señal de presión. Hallar lafunción de transferencia que relaciona la tensión de salida delpotenciómetro E(s) con la presión de entrada Pi(s), usando diagramas deflujo señal.

7/16/2019 practica41.pdf
http://slidepdf.com/reader/full/practica41pdf-568bd34c0f770 5/12
Unidad Nº 2 Práctico Nº 4
4
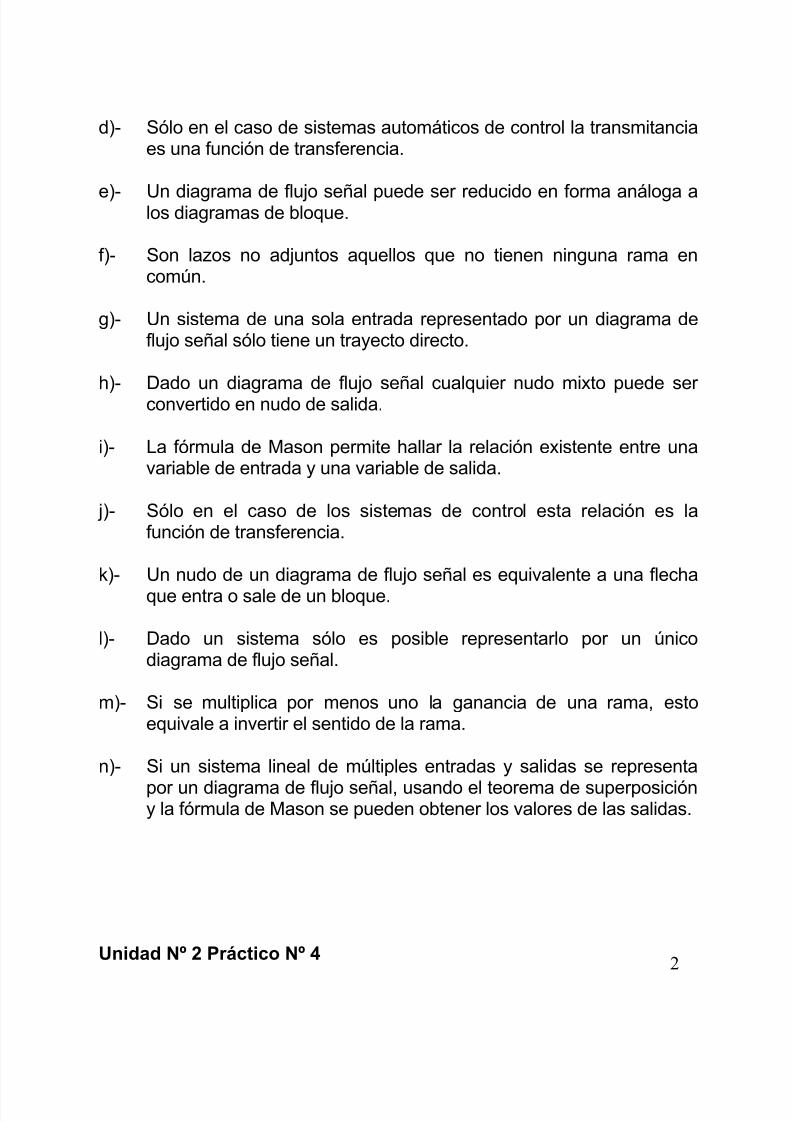
Ejercicio Nº 4: Un proceso industrial requiere que la temperatura θ(s) delos materiales a mezclar en un tanque se mantenga constante. El sistemacompleto se representa en la siguiente figura, donde la entrada es unvoltaje Vr(s) calibrado en temperaturas deseadas. La temperatura real semide por medio de un termopar sumergido en el tanque. El voltaje Vt generado en el termopar es amplificado Kb para producir un voltaje e1(s).Este a su vez excita a un solenoide de masa M que tiene una resistenciaR y una inductancia L, generando una fuerza Fm proporcional (α) a lacorriente i(s) que por él circula. Esta fuerza actúa sobre la masa M delsolenoide, para gobernar la posición x(s) de la válvula proporcional quecontrola a su vez el flujo Q(s) de calor, proveniente del calentador. Estetanque, ya estudiado anteriormente, vincula a θ(s) con Q(s) mediante lafunción de transferencia G(s). Usando diagramas de flujo señal,determinar la relación θ (s) como salida y Vr(s) como entrada.
k
V=ctte
E(out)
kr
P (in)
x
y
A
Potenciómetro
C: Coeficiente deamortiguación viscosa
M: masa de loselementos móviles
7/16/2019 practica41.pdf
http://slidepdf.com/reader/full/practica41pdf-568bd34c0f770 6/12
Unidad Nº 2 Práctico Nº 4
5
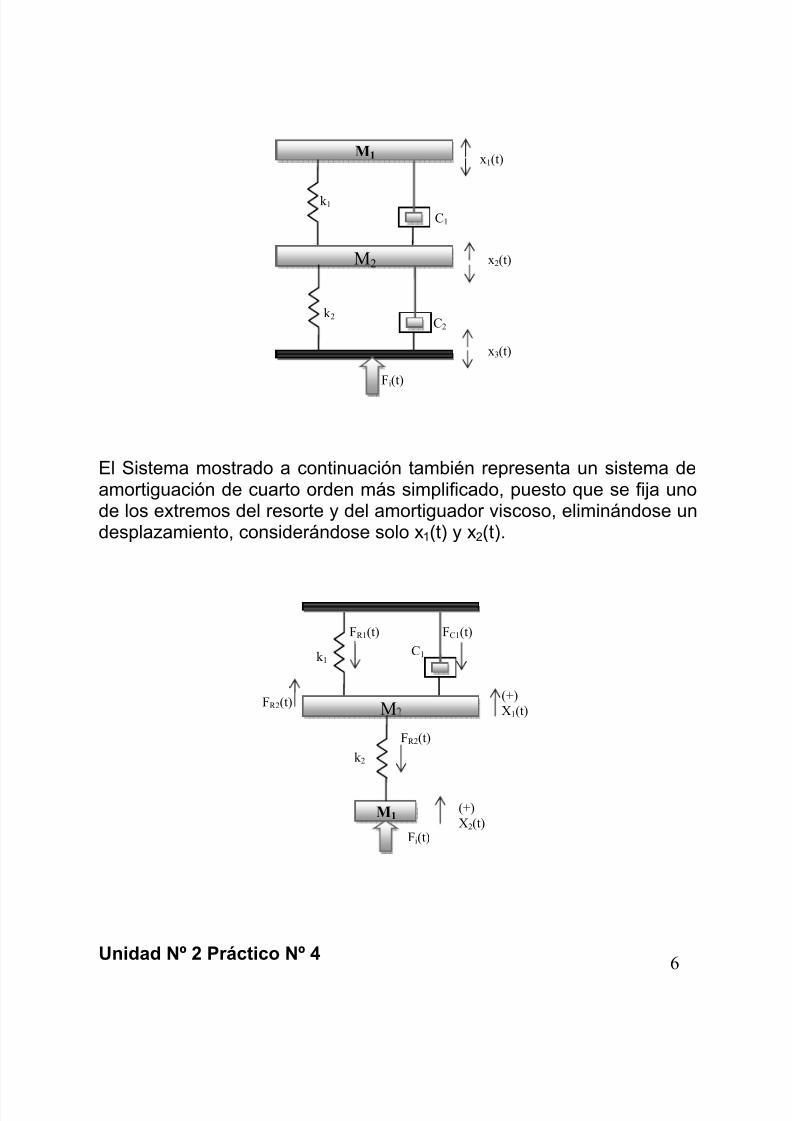
Ejercicio Nº 5: El siguiente gráfico representa una aproximación de unsistema de suspensión o amortiguador correspondiente a una rueda deun automóvil. Siendo:
M 1 = masa del chasis del autoM 2 = masa del eje del motor.M 3 = masa de las ruedas (considerada despreciable M3 =0).F i = fuerza aplicada (por las irregularidades del camino) a las ruedas.C 1 = amortiguador viscoso entre el chasis y el eje del motor.K 1 = resorte entre el chasis y el eje del motor.C 2 = amortiguador viscoso entre el eje del motor y la rueda.K 2 = resorte entre el eje del motor y la rueda.
θ
θ: Temperatura
Qc / θ=G(s)
Qc
Quemador
Termocupla
Vt
Amplificador
K b
e1
i
E Vr
Fr
Fm
Válvula (K v)
x
Gas
R
L
M Solenoide
K K t
7/16/2019 practica41.pdf
http://slidepdf.com/reader/full/practica41pdf-568bd34c0f770 7/12
Unidad Nº 2 Práctico Nº 4
6
El Sistema mostrado a continuación también representa un sistema deamortiguación de cuarto orden más simplificado, puesto que se fija unode los extremos del resorte y del amortiguador viscoso, eliminándose undesplazamiento, considerándose solo x1(t) y x2(t).
M1
M2
C1
k 1
C2
k 2
Fi(t)
x1(t)
x2(t)
x3(t)
M1
M
k 1C1
k 2
Fi(t)
FC1(t) FR1(t)
FR2(t)
FR2(t) (+)
X1(t)
(+)
X2(t)

7/16/2019 practica41.pdf
http://slidepdf.com/reader/full/practica41pdf-568bd34c0f770 8/12
Unidad Nº 2 Práctico Nº 4
7
Siendo:F i (t) = Fuerza de entrada aplicada a la masa M2 en dirección vertical.FC 1 = Fuerza de amortiguación viscosa del amortiguador C1 que actúasobre la masa M1
X1(t)= Desplazamiento de la Masa M1, del extremo de K1, C1 y de unextremo de K2 FR1 = Fuerza de recuperación del resorte K1 que actúa solo sobre M1 FR2 = Fuerza de recuperación del resorte K2 que actúa sobre M1ensentido positivo y sobre M2 en sentido negativo.X2(t)= Desplazamiento de la Masa M2, y de un extremo de K2
Encontrar la)(
)(. 1
t F
t X T F
i
= , que relaciona el desplazamiento de la masa
M1 , como variable de salida , con la fuerza Fi como variable de entrada,realizando el diagrama de flujo y aplicando la fórmula de Masson.Para plantear las ecuaciones del modelo del Sistema se sugiereconsiderar el movimiento de la masa, solo en dirección vertical yadoptar un sentido de referencia. Por ejemplo: positivo hacia arriba en la misma dirección de la fuerza y negativo hacia abajo. También sedebe plantear la resolución con algunas consideraciones: Suponer quepara un instante dado los desplazamientos x2, x1 se realizan en unmismo sentido, hacia arriba, con x2 > x1 para que el efecto de
amortiguamiento sea mayor sobre la masa M1. El resorte k2 estásometido a un movimiento relativo. Para x2 >x1, el resorte k2 seencuentre más comprimido que extendido, por lo que la fuerzarecuperadora FR2 tiende a producir el efecto contrario y estirar el resortek2 separando las dos masas, produciendo así sobre la masa M2 unafuerza FR2 en sentido negativo según el sistema de referencia, queempuja dicha masa hacia abajo, y una fuerza FR2 en sentido positivoque actúa sobre la masa M1 empujándola hacia arriba.El resorte k1 y el amortiguador C1 tienen un extremo fijo, es decir quedichos componentes no tienen movimiento relativo, por lo que ambasfuerzas FR1 y FC1 se oponen al movimiento, actuando solo sobre lamasa M1 en sentido negativo, hacia abajo.
Ejercicio Nº 6: El siguiente sistema lineal de control realimentadonegativamente, tiene por objetivo de control, mantener constante elnivel del líquido en el tanque. Para lo cual se utiliza un controlador

7/16/2019 practica41.pdf
http://slidepdf.com/reader/full/practica41pdf-568bd34c0f770 9/12
Unidad Nº 2 Práctico Nº 4
8
derivativo, formado por una palanca de brazos a y b, y un sistemaamortiguador formado por un amortiguador viscoso con movimientorelativo y un resorte con un extremo fijo y uno movil.a)- Indicar cuales son las variables de entrada y salida del sistema.
b)- Encontrar las ecuaciones que describen el comportamiento dinámicode cada componentec) Realizar el Diagrama de Flujo-Señal según sean las variables deentrada y salido del sistema.d)- Encontrar la F.T que relaciona la variable de salida sobre la variablede entrada, aplicando la Fórmula de Mason.
Ejercicio Nº 7: Dado el siguiente sistema de lazo cerrado, cuyo objetivode control, es mantener el nivel del líquido en el tanque Nº 2 constante,mediante un controlador integral, representado por la palanca, y laválvula hidráulica de potencia, se pide:a)- Indicar cuales son las variables de entrada y salida del sistema.b)-Encontrar todas las ecuaciones que describen el comportamiento
dinámico de cada componente.c)- Realizar el diagrama de flujo, considerando la entrada de referencia,la entrada de perturbación y la salida del sistema.d) - Encontrar la Salida total del sistema H2 debida a la acciónsimultánea de las dos entradas aplicadas al sistema, mediante elPrincipio de Superposición, utilizando la Fórmula de Masson
a b
A1H0
Q0
R Q
Qi
K v
K 1
C1
X2
(+)
X1
(+)
H X2
(+)
7/16/2019 practica41.pdf
http://slidepdf.com/reader/full/practica41pdf-568bd34c0f770 10/12
Unidad Nº 2 Práctico Nº 4
9
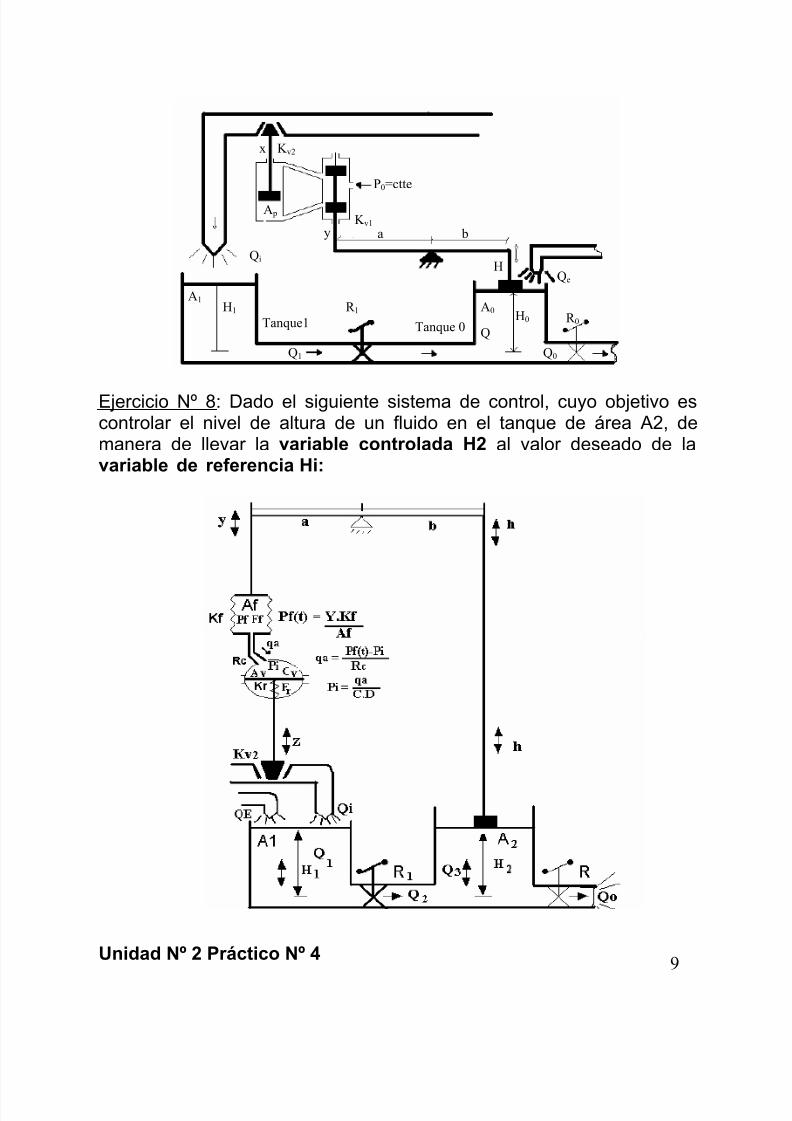
Ejercicio Nº 8: Dado el siguiente sistema de control, cuyo objetivo escontrolar el nivel de altura de un fluido en el tanque de área A2, demanera de llevar la variable controlada H2 al valor deseado de lavariable de referencia Hi:
P0=ctte
K v1
a b
K v2
Qi
H1
A1
Tanque1
R 1
Q1
H0
H
A0
Q
Q0
R 0
Qe
A p
Tanque 0
x
y

7/16/2019 practica41.pdf
http://slidepdf.com/reader/full/practica41pdf-568bd34c0f770 11/12
Unidad Nº 2 Práctico Nº 4
10
a)- Indicar cuáles son las variables de entrada y salida del sistema.b)- Encontrar todas las ecuaciones que describen el comportamientodinámico de cada componente.c)- Realizar el diagrama de flujos, considerando la entrada de
referencia, la entrada de perturbación y la salida del sistema.d)- Encontrar la Salida total del sistema H2 debida a la acciónsimultánea de las dos entradas aplicadas al sistema, mediante elPrincipio de Superposición, utilizando la fórmula de Masson
Autocorrección del práctico Nº 4
a. si e. si i. si m. nob. si f. no j. no n. si
c. si g. no k. sid. no h. si l. no
6- MATERIAL BIBLIOGRÁFICO A UTILIZAR:
a) Libros de texto:
* "Ingeniería de Control Moderna". Autor: K. OGATA.Editorial Prentice Hall (Segunda Edición). 1993.
* "Sistemas Automáticos de Control". Autor: B. KUO.Editorial Continental -México (Sexta Edición). 1991.
b) Libros de consulta:
* "Automatic Control Systems". Autor: B. KUO.Editorial Prentice Hall (Sexta Edición). 1991.
* "System Control and Modelling". Autor: J. SCHWARZENBACH and K. F.
GILL. Editorial SIEMENS. 1984.
c) Apuntes de Cátedra:
7/16/2019 practica41.pdf
http://slidepdf.com/reader/full/practica41pdf-568bd34c0f770 12/12
Unidad Nº 2 Práctico Nº 4
11
Versión Digitalizada:* PEREZ LOPEZ, M ANALIA PEREZ HIDALGO, ELISA PEREZ
“Introducción a los Sistemas de Control y Representación Matemática
de Sistemas Lineales Invariantes en el tiempo”Publicado en Internet en página Web de la cátedra año 2008-2009
(http://dea.unsj.edu.ar/control1b/)
* PEREZ LOPEZ, M ANALIA PEREZ HIDALGO, ELISA PEREZ, BRUNO
ADROVER
“Leyes y Relaciones Básicas” “Componentes y Analogías”
Publicado en Internet en página Web de la cátedra año 2008-2009(http://dea.unsj.edu.ar/control1b/)
Versión No Digitalizada
* "Introducción a los Sistemas de Control". Autor: Ing. Mario A. PérezLópez. 1982.
* “Leyes y Relaciones Básicas” “Componentes y Analogías” , Autor:Ing. Mario A. Pérez López. 1982.
d) Revistas:
* "Control Systems Magazine". Publicación periódica de IEEE. Sociedadde Control Automático. USA.