
PROTOTIPO DE ROBOT DE SERVICIO PARA GUIADO DE … · 3 metros de distancia y 7 sensores de...
7
Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, Valencia ISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC) PROTOTIPO DE ROBOT DE SERVICIO PARA GUIADO DE PERSONAS POR VISI ´ ON Abel Mart´ ınez, Houcine Hassan, Carlos Dom´ ınguez, Pedro L´ opez [email protected], {husein, carlosd, plopez}@disca.upv.es DISCA - Universitat Polit` ecnica de Val` encia Resumen En el presente art´ ıculo se presenta un prototipo de robot de servicio para trabajar en entornos hospi- talarios. En concreto, el robot es capaz de reco- nocer a los pacientes mediante reconocimiento fa- cial, para posteriormente acompa˜ narlos a la con- sulta donde van a recibir el tratamiento. El reco- nocimiento facial se consigue con la t´ ecnica PCA o Eigenfaces. El sistema dispone de un generador de mapas que registra los obst´aculos presentes en el entorno para realizar el guiado. Palabras clave: Robots de servicio, visi´ on, reco- nocimiento facial, guiado. 1. INTRODUCCI ´ ON Un robot de servicio es todo aquel robot cuya fun- ci´ on es la de realizar servicios para ayudar a perso- nas u otros robots [2]. Quedan excluidos por tanto los robots dise˜ nados para trabajar en producci´ on. Dentro del amplio campo de los robots de servicio, han aparecido en los ´ ultimos a˜ nos diferentes robots con la misi´ on de realizar servicios para las perso- nas [3]. Uno de los primeros robots m´ oviles que consigui´ o entrar en el mercado dom´ estico como electrodom´ estico fue el robot aspirador Roomba, que empez´ o a comercializar la compa˜ n´ ıa iRobot en 2002 [4][6]. Otro ejemplo de robot de servicio es el Big-Dog [11], desarrollado por Boston Dinamics y DARPA en 2008, que es capaz de transportar una carga de 150kg o avanzar por pendientes de hasta 35 ◦ de inclinaci´ on. Por otro lado, en el sector de la medicina est´ an surgiendo avances en los ´ ultimos a˜ nos[1], como por ejemplo el robot de intervencio- nes quir´ urgicas Da Vinci. Otros robots se utilizan en los hospitales para transportar materiales tales como medicamentos. Tambi´ en existen exoesquele- tos destinados a la recuperaci´ on de personas con lesiones, o para ayudar a caminar a personas ma- yores o con lesiones permanentes. El cuidado de las personas mayores es uno de los campos m´ as investigados en rob´ otica en los ´ ulti- mos a˜ nos, m´ as todav´ ıa cuando el envejecimiento de la poblaci´ on espa˜ nola es un hecho notable [9]. Por otra parte, las previsiones de inversi´ on de la Uni´ on Europea en este tipo de robots nos confir- man que el empleo de robots de servicio es una ten- dencia al alza que resulta interesante investigar. Es por estos motivos que en este art´ ıculo se presen- ta una prueba de concepto de un robot de servi- cio para aplicaciones hospitalarias. Los potenciales usuarios de la aplicaci´ on son personas mayores que visitan las consultas externas de un centro hospi- talario. La aplicaci´ on que se desea evaluar es la de acompa˜ namiento de personas mayores que nor- malmente se desorientan. Estas personas ya tienen cita, y el sistema sabe a qu´ e consulta deben acu- dir y en qu´ e momento. Mediante la detecci´ on del paciente y su posterior reconocimiento por visi´ on artificial, el robot consulta la base de datos donde se hallan los datos de localizaci´ on de la consulta de destino. El presente art´ ıculo se organiza como sigue. En la secci´ on 2 se describe la aplicaci´ on y en la secci´ on 3 se presenta la plataforma del robot. En la secci´ on 4 se introducen las modificaciones realizadas a la plataforma original. Las secciones 5 y 6 presentan las pruebas y algunas conclusiones respectivamen- te. 2. APLICACI ´ ON La Figura 1 muestra una imagen del prototipo del robot. Figura 1: Robot X-80 Pro La aplicaci´ on cuenta con una interfaz de usuario con la que se puede ver d´ onde se encuentra el ro-
Transcript of PROTOTIPO DE ROBOT DE SERVICIO PARA GUIADO DE … · 3 metros de distancia y 7 sensores de...

Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
PROTOTIPO DE ROBOT DE SERVICIO PARA GUIADO DEPERSONAS POR VISION
Abel Martınez, Houcine Hassan, Carlos Domınguez, Pedro [email protected], {husein, carlosd, plopez}@disca.upv.es
DISCA - Universitat Politecnica de Valencia
Resumen
En el presente artıculo se presenta un prototipo derobot de servicio para trabajar en entornos hospi-talarios. En concreto, el robot es capaz de reco-nocer a los pacientes mediante reconocimiento fa-cial, para posteriormente acompanarlos a la con-sulta donde van a recibir el tratamiento. El reco-nocimiento facial se consigue con la tecnica PCAo Eigenfaces. El sistema dispone de un generadorde mapas que registra los obstaculos presentes enel entorno para realizar el guiado.
Palabras clave: Robots de servicio, vision, reco-nocimiento facial, guiado.
1. INTRODUCCION
Un robot de servicio es todo aquel robot cuya fun-cion es la de realizar servicios para ayudar a perso-nas u otros robots [2]. Quedan excluidos por tantolos robots disenados para trabajar en produccion.Dentro del amplio campo de los robots de servicio,han aparecido en los ultimos anos diferentes robotscon la mision de realizar servicios para las perso-nas [3]. Uno de los primeros robots moviles queconsiguio entrar en el mercado domestico comoelectrodomestico fue el robot aspirador Roomba,que empezo a comercializar la companıa iRobot en2002 [4][6]. Otro ejemplo de robot de servicio es elBig-Dog [11], desarrollado por Boston Dinamics yDARPA en 2008, que es capaz de transportar unacarga de 150kg o avanzar por pendientes de hasta35◦ de inclinacion. Por otro lado, en el sector dela medicina estan surgiendo avances en los ultimosanos[1], como por ejemplo el robot de intervencio-nes quirurgicas Da Vinci. Otros robots se utilizanen los hospitales para transportar materiales talescomo medicamentos. Tambien existen exoesquele-tos destinados a la recuperacion de personas conlesiones, o para ayudar a caminar a personas ma-yores o con lesiones permanentes.
El cuidado de las personas mayores es uno de loscampos mas investigados en robotica en los ulti-mos anos, mas todavıa cuando el envejecimientode la poblacion espanola es un hecho notable [9].Por otra parte, las previsiones de inversion de la
Union Europea en este tipo de robots nos confir-man que el empleo de robots de servicio es una ten-dencia al alza que resulta interesante investigar. Espor estos motivos que en este artıculo se presen-ta una prueba de concepto de un robot de servi-cio para aplicaciones hospitalarias. Los potencialesusuarios de la aplicacion son personas mayores quevisitan las consultas externas de un centro hospi-talario. La aplicacion que se desea evaluar es lade acompanamiento de personas mayores que nor-malmente se desorientan. Estas personas ya tienencita, y el sistema sabe a que consulta deben acu-dir y en que momento. Mediante la deteccion delpaciente y su posterior reconocimiento por visionartificial, el robot consulta la base de datos dondese hallan los datos de localizacion de la consultade destino.
El presente artıculo se organiza como sigue. En laseccion 2 se describe la aplicacion y en la seccion 3se presenta la plataforma del robot. En la seccion4 se introducen las modificaciones realizadas a laplataforma original. Las secciones 5 y 6 presentanlas pruebas y algunas conclusiones respectivamen-te.
2. APLICACION
La Figura 1 muestra una imagen del prototipo delrobot.
Figura 1: Robot X-80 Pro
La aplicacion cuenta con una interfaz de usuariocon la que se puede ver donde se encuentra el ro-

Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
bot o que funcion esta desempenando. Tambien esposible enviar nuevas ordenes al robot, ası comodetenerlo y manejarlo manualmente.
Una de las tareas que se puede ordenar al robot esla de esperar a los pacientes citados en la entrada,reconocerlos visualmente a su llegada, acercarse aellos e identificar cual es su funcion en el hospital,invitarles a que le sigan y guiarles hasta su con-sulta comprobando que no pierde a sus asistidos.Para realizar la funcion anterior en un entorno se-miestructurado, con personas y obstaculos movi-les, debe mantener un mapa del espacio de navega-cion e implementar comportamientos de evitacionde colisiones y busqueda de caminos. La Figura 2muestra al robot acompanando a un usuario.
Figura 2: Robot acompanando a usuario.
Aunque el enfoque de la aplicacion consiste en queel robot acompane a pacientes en entornos hos-pitalarios, se podrıa adaptar el robot para, porejemplo, atencion al publico en ferias o recepcionde clientes en oficinas.
3. PLATAFORMA DEL ROBOT
El robot elegido para montar el prototipo es laplataforma robotica X80Pro del fabricante Dr. Ro-bot. Dicho robot cuenta con multiples sensores derango que le permiten conocer los obstaculos mascercanos a el. Tiene dos tipos de sensores de rango,6 sensores de ultrasonidos que pueden medir hasta3 metros de distancia y 7 sensores de infrarrojoscon un alcance de 80 centımetros. Tambien cuentacon 2 sensores piroelectricos que detectan la pre-sencia de personas. El robot dispone, ademas, dedos codificadores rotatorios digitales de 1.200 pul-sos por revolucion acoplados a las ruedas. Cuentatambien con diferentes sensores de voltaje e inten-
sidad, inclinometros, etc. Esta plataforma podrıano ser la mas indicada para su uso en ambienteshospitalarios, debido a sus dimensiones y aspecto,pero ha permitido validar la aplicacion en sı, a lapar que comprobar los componentes software quese requiere combinar en la aplicacion.
El movimiento del robot se consigue gracias a 2motores de corriente continua de 12V que actuandirectamente sobre 2 ruedas de 17.8 cm. La pla-taforma robotica dispone de una camara colocadaen el extremo de un brazo robotico, lo que le per-mite inclinarse vertical y horizontalmente.
El robot dispone de diferentes modulos para in-teractuar con el usuario: tiene microfono y alta-voz para grabar y reproducir audio continuamen-te. Tambien tiene una pantalla LCD monocromode 128 x 64 pıxeles. Por ultimo, el usuario puedeenviar senales al robot utilizando un mando a dis-tancia.
El robot utiliza la Arquitectura de ComputacionDistribuida Dr. Robot. En esta configuracion, lacomputacion se realiza fuera del robot. Esto sig-nifica que tanto los actuadores (motores y servo-motores) como los sensores (de rango, de inclina-cion, codificadores rotatorios, etc.) estan contro-lados por un procesador digital de senal (DSP)que se encarga de sus acciones de control y lectu-ra de sus valores, respectivamente. Por otra parte,la computacion de alto nivel se lleva a cabo en elPC o servidor que controla el robot. La comunica-cion entre el PC y el robot se realiza mediante unaconexion inalambrica WI-FI. El robot y el PC pue-den intercambiar acciones de control y obtener lasmedidas de los sensores hasta 10 veces por segun-do. La camara inalambrica Trendnet TV-IP672WI
Figura 3: Arquitectura
se monta sobre la plataforma del robot para ofre-cer una mayor calidad de las imagenes, como seexplicara mas adelante, en la seccion 4. Para queel ordenador pueda tener acceso a las imagenes
Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
que envıa la camara, ambos deben estar conecta-dos a la misma red. En la Figura 3 se pueden verlas conexiones de los tres equipos.
4. MODIFICACIONES SOBRELA PLATAFORMA ORIGINAL
4.1. Incorporacion de camara
Se ha anadido una camara inalambrica al sistemapara realizar el reconocimiento facial. Dicha cama-ra cuenta con transmision de datos WI-FI capazde transmitir hasta 30 imagenes por segundo, conuna calidad de 1.280 x 800 pıxeles.
El fabricante de la camara ofrece diferentes solu-ciones para acceder a las imagenes tomadas por eldispositivo. En nuestro caso, se accede a las image-nes utilizando la direccion IP de la camara. Seutiliza la librerıa openCV tanto para la toma deimagenes como para el reconocimiento facial. Parapoder utilizar la librerıa openCV en el programade control, que esta escrito en C#, se ha utiliza-do la librerıa emguCV. La librerıa emguCV es un“wrapper” o un envoltorio que permite utilizar lasfunciones de la librerıa openCV en lenguajes tipo.NET.
4.2. Desarrollo del software robot deservicio
El motivo principal por el cual se ha programadoel robot en lenguaje C# es porque la librerıa defunciones que ofrece el fabricante esta escrita eneste lenguaje. El uso de la librerıa del fabricantepermite un rapido arranque en la programacionde aplicaciones. El problema es que impide el ac-ceso a herramientas de codigo abierto disponiblesen otros lenguajes, como por ejemplo utilizandoel middleware ROS. Por ello en el futuro se plan-tea la migracion del codigo a este middleware paraanadir funcionalidades al robot.
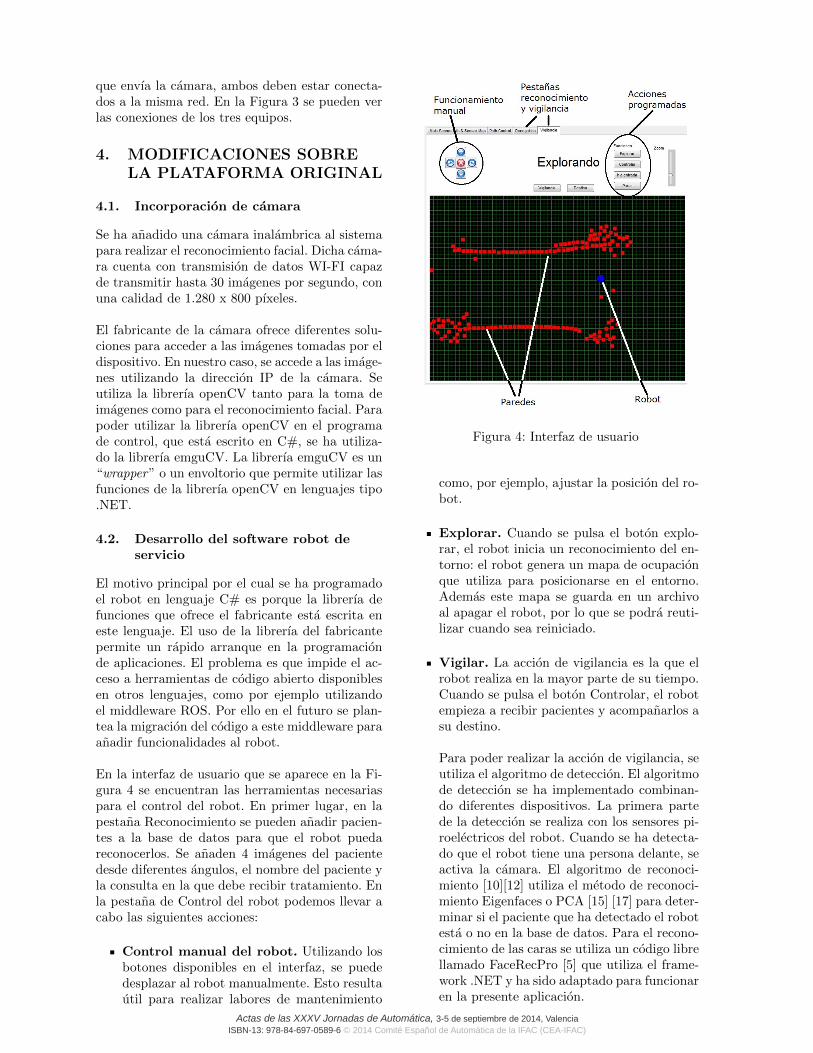
En la interfaz de usuario que se aparece en la Fi-gura 4 se encuentran las herramientas necesariaspara el control del robot. En primer lugar, en lapestana Reconocimiento se pueden anadir pacien-tes a la base de datos para que el robot puedareconocerlos. Se anaden 4 imagenes del pacientedesde diferentes angulos, el nombre del paciente yla consulta en la que debe recibir tratamiento. Enla pestana de Control del robot podemos llevar acabo las siguientes acciones:
Control manual del robot. Utilizando losbotones disponibles en el interfaz, se puededesplazar al robot manualmente. Esto resultautil para realizar labores de mantenimiento
Figura 4: Interfaz de usuario
como, por ejemplo, ajustar la posicion del ro-bot.
Explorar. Cuando se pulsa el boton explo-rar, el robot inicia un reconocimiento del en-torno: el robot genera un mapa de ocupacionque utiliza para posicionarse en el entorno.Ademas este mapa se guarda en un archivoal apagar el robot, por lo que se podra reuti-lizar cuando sea reiniciado.
Vigilar. La accion de vigilancia es la que elrobot realiza en la mayor parte de su tiempo.Cuando se pulsa el boton Controlar, el robotempieza a recibir pacientes y acompanarlos asu destino.
Para poder realizar la accion de vigilancia, seutiliza el algoritmo de deteccion. El algoritmode deteccion se ha implementado combinan-do diferentes dispositivos. La primera partede la deteccion se realiza con los sensores pi-roelectricos del robot. Cuando se ha detecta-do que el robot tiene una persona delante, seactiva la camara. El algoritmo de reconoci-miento [10][12] utiliza el metodo de reconoci-miento Eigenfaces o PCA [15] [17] para deter-minar si el paciente que ha detectado el robotesta o no en la base de datos. Para el recono-cimiento de las caras se utiliza un codigo librellamado FaceRecPro [5] que utiliza el frame-work .NET y ha sido adaptado para funcionaren la presente aplicacion.
Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
4.3. Comportamientos implementados enel robot
Se han implementado una serie de comportamien-tos del robot que se utilizan en los distintos modosde funcionamiento descritos anteriormente.
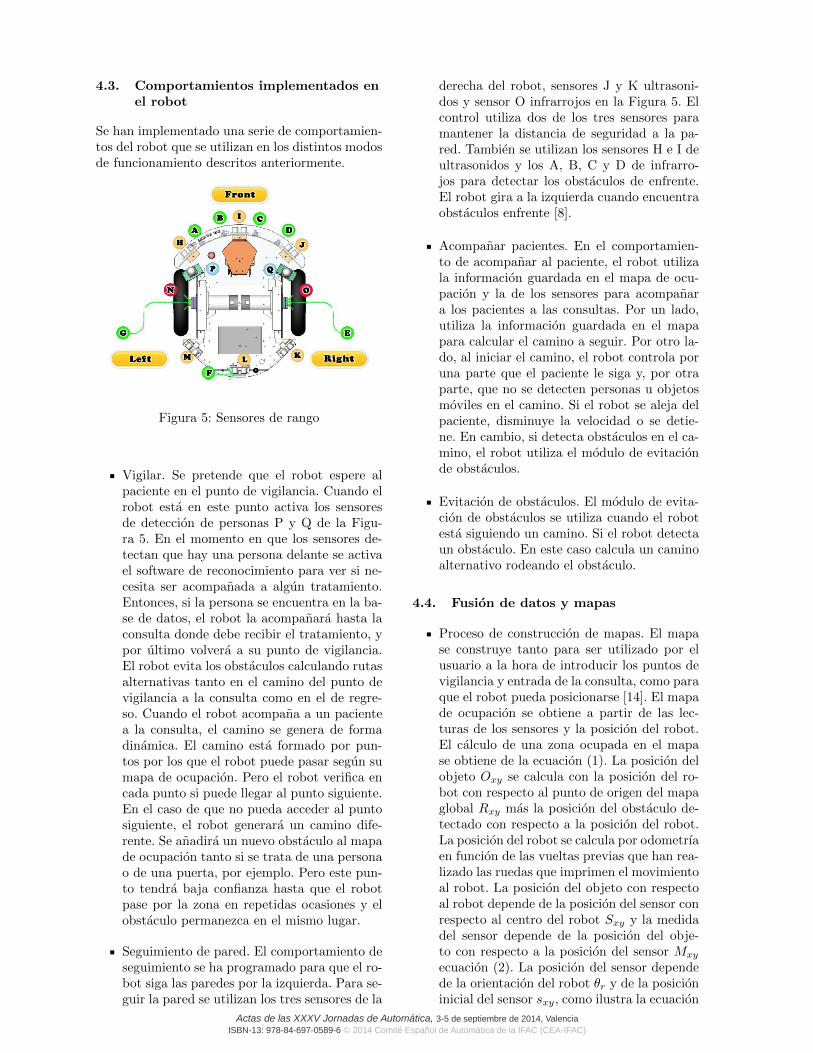
Figura 5: Sensores de rango
Vigilar. Se pretende que el robot espere alpaciente en el punto de vigilancia. Cuando elrobot esta en este punto activa los sensoresde deteccion de personas P y Q de la Figu-ra 5. En el momento en que los sensores de-tectan que hay una persona delante se activael software de reconocimiento para ver si ne-cesita ser acompanada a algun tratamiento.Entonces, si la persona se encuentra en la ba-se de datos, el robot la acompanara hasta laconsulta donde debe recibir el tratamiento, ypor ultimo volvera a su punto de vigilancia.El robot evita los obstaculos calculando rutasalternativas tanto en el camino del punto devigilancia a la consulta como en el de regre-so. Cuando el robot acompana a un pacientea la consulta, el camino se genera de formadinamica. El camino esta formado por pun-tos por los que el robot puede pasar segun sumapa de ocupacion. Pero el robot verifica encada punto si puede llegar al punto siguiente.En el caso de que no pueda acceder al puntosiguiente, el robot generara un camino dife-rente. Se anadira un nuevo obstaculo al mapade ocupacion tanto si se trata de una personao de una puerta, por ejemplo. Pero este pun-to tendra baja confianza hasta que el robotpase por la zona en repetidas ocasiones y elobstaculo permanezca en el mismo lugar.
Seguimiento de pared. El comportamiento deseguimiento se ha programado para que el ro-bot siga las paredes por la izquierda. Para se-guir la pared se utilizan los tres sensores de la
derecha del robot, sensores J y K ultrasoni-dos y sensor O infrarrojos en la Figura 5. Elcontrol utiliza dos de los tres sensores paramantener la distancia de seguridad a la pa-red. Tambien se utilizan los sensores H e I deultrasonidos y los A, B, C y D de infrarro-jos para detectar los obstaculos de enfrente.El robot gira a la izquierda cuando encuentraobstaculos enfrente [8].
Acompanar pacientes. En el comportamien-to de acompanar al paciente, el robot utilizala informacion guardada en el mapa de ocu-pacion y la de los sensores para acompanara los pacientes a las consultas. Por un lado,utiliza la informacion guardada en el mapapara calcular el camino a seguir. Por otro la-do, al iniciar el camino, el robot controla poruna parte que el paciente le siga y, por otraparte, que no se detecten personas u objetosmoviles en el camino. Si el robot se aleja delpaciente, disminuye la velocidad o se detie-ne. En cambio, si detecta obstaculos en el ca-mino, el robot utiliza el modulo de evitacionde obstaculos.
Evitacion de obstaculos. El modulo de evita-cion de obstaculos se utiliza cuando el robotesta siguiendo un camino. Si el robot detectaun obstaculo. En este caso calcula un caminoalternativo rodeando el obstaculo.
4.4. Fusion de datos y mapas
Proceso de construccion de mapas. El mapase construye tanto para ser utilizado por elusuario a la hora de introducir los puntos devigilancia y entrada de la consulta, como paraque el robot pueda posicionarse [14]. El mapade ocupacion se obtiene a partir de las lec-turas de los sensores y la posicion del robot.El calculo de una zona ocupada en el mapase obtiene de la ecuacion (1). La posicion delobjeto Oxy se calcula con la posicion del ro-bot con respecto al punto de origen del mapaglobal Rxy mas la posicion del obstaculo de-tectado con respecto a la posicion del robot.La posicion del robot se calcula por odometrıaen funcion de las vueltas previas que han rea-lizado las ruedas que imprimen el movimientoal robot. La posicion del objeto con respectoal robot depende de la posicion del sensor conrespecto al centro del robot Sxy y la medidadel sensor depende de la posicion del obje-to con respecto a la posicion del sensor Mxy
ecuacion (2). La posicion del sensor dependede la orientacion del robot θr y de la posicioninicial del sensor sxy, como ilustra la ecuacion

Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
(3).
Oxy = Rxy +Dxy (1)
Dxy = Sxy +Mxy (2)
Sxy =
[Cos(θr) Sen(θr)−Sen(θr) Cos(θr)
]sxy (3)
Fusion de datos. En este caso el robot disponede dos tipos de sensores con caracterısticas di-ferentes. Es necesario un criterio de seleccionde las medidas tomadas por los sensores, conel fin de maximizar la calidad del mapa to-mado por el robot. En concreto, para anadirun nuevo obstaculo, se aceptaran las medidasque se encuentran en la zona mas precisa delsensor.
En el ambiente en el que se mueve el robot,sus sensores del robot podrıan anadir nuevosobstaculos en practicamente infinitos puntosdel espacio del plano XY. Con el motivo detener un numero limitado de obstaculos, seha implementado una funcion que consiste enque, antes de anadir un nuevo obstaculo almapa de ocupacion, el robot comprueba queno existe ningun obstaculo a una distanciainferior a un umbral. En el caso de que sedetecte un obstaculo previo a una distanciainferior al umbral, se aumentara la confianzaen el obstaculo anterior en lugar de anadir unnuevo obstaculo.
Posicionamiento en el entorno. El robot utili-za los datos del mapa de ocupacion para co-rregir errores acumulados. De este modo, siel sensor indica al robot que se encuentra auna distancia de una pared, pero en la basede datos la pared esta a una distancia supe-rior, el control determinara que es la posiciondel robot la que se debe corregir, en lugar deanadir los obstaculos correspondientes a unanueva pared a la mapa de ocupacion.
Posicionamiento por vision. El control del ro-bot utiliza la vision artificial para rectificar laposicion y orientacion del robot. Despues detomar imagenes del entorno, el robot extraelas marcas que le pueden servir para posicio-narse en el futuro: aristas de pilares, marcosde puertas, zocalos, etc. Cuando en sucesi-vas iteraciones el robot pase por las mismascoordenadas, extraera nuevamente las marcasdel entorno, compensando si es necesario suposicion en funcion de la diferencia entre lasmarcas de ambas fotografıas.
Interaccion con el paciente. La conversacionentre el paciente y el robot esta dividida en
tres fases. En la primera fase, el robot se pre-senta al paciente enviando el siguiente mensa-je de audio: “Buenos dıas senor usuario, soyel robot de servicio del hospital, ¿desea que leacompane a la consulta X ?”. En la segundafase de la comunicacion, el robot reconoce laspalabras “sı” y “no” del paciente, e inicia ocancela el acompanamiento a la consulta. Fi-nalmente, en la tercera fase, el robot controlael proceso durante el acompanamiento y fina-liza el servicio si el paciente decide no seguiral robot o llega a la consulta.
5. EVALUACION PRELIMINAR
En las pruebas que se han realizado sobre el proto-tipo se han evaluado dos modulos. Por una parte,se ha probado la fiabilidad del modulo de recono-cimiento facial y por otra parte se ha probado elrobot en una aplicacion piloto de atencion a pa-cientes en ambientes hospitalarios.
5.1. Experimento 1. Reconocimientofacial
Para evaluar el funcionamiento del modulo de re-conocimiento facial, se ha obtenido el numero deno-detecciones que cometıa el sistema ante unusuario que sı estaba registrado en la base dedatos. En las imagenes guardadas en la base dedatos, se han tomado imagenes desde diferentesangulos y posiciones. Por ello el sistema resultamas robusto frente a cambios de orientacion en ladeteccion de los pacientes. La aplicacion redimen-siona las imagenes, las convierte a escala de grisesy ajusta sus niveles. Este procedimiento se realizapara evitar problemas de reconocimiento relacio-nados con cambios en la iluminacion. En concre-to, se ha disenado el siguiente procedimiento pararealizar la evaluacion.
Se anaden las fotografıas del usuario a la basede datos.
El usuario se posiciona frente al detector endiferentes posiciones y orientaciones.
Se obtienen las detecciones y no-detecciones.
La Figura 6 muestra los resultados obtenidos. Elporcentaje de aciertos en la deteccion de los usua-rios aumenta a medida que aumenta la cantidadde imagenes del usuario en la base de datos. Elsistema tiene una tasa de acierto del inferior al65 % cuando se ha cargado una unica imagen enla base de datos. Cuando se cargan dos imagenesel reconocedor acierta mas del 85 % de las veces.Por ultimo, cuando se guardan 4 imagenes en la

Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
base de datos, los resultados de acierto superan el93 % de los casos, lo que significa que el porcen-taje de errores es inferior al 7 %. A partir de los
Figura 6: Resultados reconocimiento.
resultados presentados se descarta por el momen-to el uso de una unica imagen para detectar a lospacientes. Los resultados con dos imagenes en labase de datos son bastante mejores, pero para eldesarrollo del segundo experimento se tomaran 4imagenes de cada paciente.
5.2. Experimento 2. Acompanamiento depacientes
En este experimento se ha probado la fiabilidaddel robot en la tarea de acompanar pacientes alas consultas donde deben recibir el tratamiento.Para ello se plantea un escenario en el que hay4 consultas donde acompanar a los pacientes. Ca-da paciente tiene asignada una consulta; y el robotcuenta con una base de datos de 4 imagenes de ca-da paciente. El total de pacientes es de 50. El expe-rimento se ha llevado a cabo en el segundo piso deledificio del DISCA. En este edificio se encuentranlos despachos de algunos profesores y laboratoriosde practicas. El robot podıa por tanto encontrarpersonas por los pasillos. Se tenıa en cuenta que nose cerraran las puertas para acceder a las consul-tas. En la Figura 7 se muestra un esquema del es-cenario de la aplicacion. En primer lugar, el robotha de detectar al paciente mediante los sensores y,posteriormente, reconocerlo a traves de la camarapara acompanarlo ası a la consulta correspondien-te. En la Figura 8 se muestran los resultados dela prueba con los pacientes acompanados correc-tamente, marcados en azul. Los pacientes acom-panados a una consulta incorrecta estan marca-dos en verde. Se ha comprobado que este error sedebe a que, en la fase de deteccion, el robot haconfundido el rostro de un paciente con el de otro.En rojo se observa la tasa de fallo en el reconoci-miento de un paciente (pacientes no detectados).En la grafica se puede ver como el robot es capazde reconocer y acompanar con exito al 84 % de lospacientes, tiene problemas para reconocer al 10 %de los pacientes y tiene errores de confusion de
Figura 7: Escenario experimento 2.
pacientes en el 6 % de las ocasiones.
Figura 8: Resultado acompanamiento.
Analizando los resultados de este experimento seobserva que ha aumentado ligeramente el numerode pacientes no detectados debido al mayor nume-ro de personas que entran en juego en la escena.A pesar de ello, el robot sigue acompanando deforma correcta al 84 % de los usuarios. En un fu-turo, se preve mejorar estos resultados aumentan-do el numero de muestras en la base de datos deimagenes y del numero de perfiles de cada pacien-te, ası como aumentar el numero de fotogramaspor segundo y las prestaciones del procesador pa-ra soportar dicho computo. Otro de los aspectosque se desea analizar son los problemas socialesque puedan surgir como, por ejemplo, personasque no desean acompanar al robot o que lo aban-donan cuando se ha iniciado el servicio.
Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
6. CONCLUSIONES
En este artıculo hemos presentado una aplicacionde un robot de servicio para su uso en instalacio-nes hospitalarias.
Se han descrito los componentes que forman elprototipo, la plataforma robotica, la camara devigilancia con conexion inalambrica y el softwarede control de la aplicacion. Tambien se han expli-cado las modificaciones realizadas sobre la plata-forma robotica original, ası como sobre el softwarede control.
El desarrollo de este prototipo nos ha permitidocomprobar la viabilidad de la aplicacion, integran-do las diferentes herramientas software y hardwareque se han planteado en este artıculo.
Tambien hemos realizado pruebas sobre el funcio-namiento del robot de servicio, tras las cuales po-demos avanzar en el desarrollo de la aplicacion,por ejemplo en la realizacion de una prueba pilotoen un entorno hospitalario.
Agradecimientos
Este artıculo ha sido financiado en parte por elproyecto PAID/2012/325 del Vicerrectorado deInvestigacion, Innovacion y Transferencia de laUniversitat Politecnica de Valencia.
Referencias
[1] Arroyo, C. (2005). Cirugıa robotica. Elemen-tos: Ciencia y Cultura, 12(58), 13-17.
[2] Barrientos, A. (2002). Nuevas aplicaciones dela robotica. Robots de servicio. Avances enrobotica y vision por computador. Cuenca,Ediciones Castilla-La Mancha, 288.
[3] Blanco, D., Ansari, S. A., Castejon, C., Boa-da, B. L., y Moreno, L. E. (2005). MAN-FRED: Robot Antropomorfico De ServicioFiable Y Seguro para operar En Entornos Hu-manos. Revista Iberoamericana de IngenierıaMecanica, 9(3), 33-48.
[4] Forlizzi, J., & DiSalvo, C. (2006, March).Service robots in the domestic environment:a study of the roomba vacuum in the ho-me. In Proceedings of the 1st ACM SIG-CHI/SIGART conference on Human-robotinteraction (pp. 258-265). ACM.
[5] Gutierrez, S. A. (2011).www.codeproject.com/Articles/239849/Multiple-face-detection-and-recognition-in-real-ti.
[6] Jones, J. L. (2006). Robots at the tippingpoint: the road to iRobot Roomba. Robotics& Automation Magazine, IEEE, 13(1), 76-78.
[7] Kam, M., Zhu, X., & Kalata, P. (1997). Sen-sor fusion for mobile robot navigation. Pro-ceedings of the IEEE, 85(1), 108-119.
[8] Kim, B. (2010). CAN-2: Behaviour-based co-llision avoidance and formation control ofmultiple unmanned vehicles. RTO-TR-HFM-170, NATO Science and Technology Organi-zation, December 2012.
[9] Otero, A., Zunzunegui, M. V., Rodrıguez-Laso, A., Aguilar, M. D., y Lazaro, P. (2004).Volumen y tendencias de la dependencia aso-ciada al envejecimiento en la poblacion es-panola. Rev Esp Salud Publica, 78(2), 201-213.
[10] Perez, C., Vicente, M. A., Fernandez, C.,Reinoso, O., y Gil, A. (2003). Aplicacion delos diferentes espacios de color para detecciony seguimiento de caras. Proceedings of XXIVJornadas de Automatica.
[11] Raibert, M., Blankespoor, K., Nelson, G., &Playter, R. (2008, July). Bigdog, the rough-terrain quadruped robot. In Proceedings ofthe 17th World Congress (pp. 10823-10825).
[12] Rama, A., y Tarres, F. (2007). Un nuevometodo para la deteccion de caras basado enintegrales difusas. XII Simposium Nacionalde la Union Cientıfica Internacional de Ra-dio.
[13] Rao, B. S. Y., Durrant-Whyte, H. F., &Sheen, J. A. (1993). A fully decentralizedmulti-sensor system for tracking and survei-llance. The International Journal of RoboticsResearch, 12(1), 20-44.
[14] Thrun, S. (2003). Learning occupancy gridmaps with forward sensor models. Autono-mous robots, 15(2), 111-127.
[15] Turk, M., & Pentland, A. (1991). Eigenfacesfor recognition. Journal of cognitive neuros-cience, 3(1), 71-86.
[16] Vera, P. S. (1996). Tercera y cuarta edaden Espana desde la perspectiva de los hoga-res. Revista Espanola de Investigaciones So-ciologicas CIS, 73, 60.
[17] Yang, J., Zhang, D., Frangi, A. F., & Yang,J. Y. (2004). Two-dimensional PCA: a newapproach to appearance-based face represen-tation and recognition. Pattern Analysis andMachine Intelligence, IEEE Transactions on,26(1), 131-137.


















