PROYECTO DE GRADUACIÓN TRABAJO FINAL DE...
91
PROYECTO DE GRADUACIÓN TRABAJO FINAL DE GRADO EL RENACIMIENTO DE LA ESTEREOSCOPÍA Conozca en profundidad su técnica COUTADA, Julián Cuerpo B del PG 27/02/2013 Diseño de Imagen y Sonido Proyecto de Creación y Expresión Nuevas Tecnologías
Transcript of PROYECTO DE GRADUACIÓN TRABAJO FINAL DE...
PROYECTO DE GRADUACIÓN TRABAJO FINAL DE GRADO
EL RENACIMIENTO DE LA ESTEREOSCOPÍA Conozca en profundidad su técnica
COUTADA, Julián Cuerpo B del PG
27/02/2013 Diseño de Imagen y Sonido
Proyecto de Creación y Expresión Nuevas Tecnologías
Índice
Introducción................................................................................................................ 1
Capítulo 1: Conceptos introductorios...................................................................... 6
1.1. Diseño de imagen y sonido........................................................................ 6
1.1.1. Especialidades de la carrera....................................................... 8
1.1.2. El lugar de la estereoscopía........................................................ 9
1.2. El renacimiento de la estereoscopía.......................................................... 9
1.3. Orígenes de la estereoscopía.................................................................... 11
1.4. Descubrimientos científicos........................................................................ 16
1.4.1. Disparidad binocular y estereopsis.............................................. 17
1.4.2. Indicios monoculares................................................................... 18
Capítulo 2: Fundamentos del cine estereoscópico................................................. 22
2.1. La industria del 3D.................................................................................... 22
2.1.1. La complejidad del cine 3D......................................................... 23
2.1.2. Cómo empezar............................................................................ 24
2.2. Paralaje...................................................................................................... 25
2.2.1. Paralaje cero................................................................................ 27
2.2.2. Paralaje positivo.......................................................................... 28
2.2.3. Paralaje negativo......................................................................... 28
2.2.3.1. Efectos indeseados del paralaje negativo.................... 29
2.2.4. Paralaje divergente...................................................................... 29
2.3. Distancia Interocular e interaxial................................................................ 30
2.4. Convergencia............................................................................................. 31
Capítulo 3: Puesta de cámaras y confort visual estereoscópico.......................... 33
3.1. Convergencia de ejes ópticos o Toe-in...................................................... 33
3.2. Ejes ópticos paralelos................................................................................ 36
3.3. Configuración del plano de paralaje cero................................................... 36
3.3.1. Desplazamiento horizontal de la imagen o H.I.T......................... 37
3.3.2. Desplazamiento horizontal de la matriz de la cámara................. 39
3.4. Estructuras de cámaras estereoscópicas.................................................. 41
3.4.1. Lado a lado.................................................................................. 41
3.4.2. Sistema de cámaras con espejo.................................................. 41
3.5. Reglas para un efecto 3D confortable........................................................ 43
3.5.1. Distancia y tamaño de la pantalla................................................ 43
3.5.2. La estereoscopía como ventana.................................................. 45
3.5.3. La zona de confort....................................................................... 46
Capítulo 4: Formatos, proyección y visualización.................................................. 48
4.1. Formatos de visión estereoscópica........................................................... 48
4.1.1. Entrelazado................................................................................. 49
4.1.2. Arriba y abajo.............................................................................. 49
4.1.3. Izquierda y derecha..................................................................... 50
4.2. Métodos de visualización........................................................................... 50
4.2.1. Sistema Anaglifo.......................................................................... 51
4.2.2. Sistema de luz polarizada............................................................ 52
4.2.3. Sistema de campo secuencial..................................................... 54
4.2.4. Monitores auto-estereoscópicos.................................................. 55

Capítulo 5: Reflexiones y análisis acerca de la estereoscopía.............................. 57
5.1. El espectáculo y la búsqueda de una experiencia realista........................ 57
5.2. La estereoscopía en El Hobbit: Un Viaje Inesperado (2012)..................... 60
5.2.1. Características particulares del proyecto..................................... 61
5.2.2. La estereoscopía como complemento narrativo.......................... 64
5.2.3. Desafíos y dificultades en el equipo de producción..................... 65
Capítulo 6: Videotutorial............................................................................................ 69
6.1. Características del proyecto....................................................................... 69
6.2. Reglas para crear estereoscopía confortable............................................ 70
6.3. Pasos para crear una puesta de cámaras 3D............................................ 72
6.3.1. Configuración del plano de convergencia.................................... 72
6.3.2. Calcular la distancia interaxial..................................................... 73
6.3.3. Calcular el tamaño horizontal del plano de convergencia........... 75
6.3.4. Calcular el FOV correcto de la cámara........................................ 76
6.3.5. Calcular la zona de confort.......................................................... 77
6.3.6. Realizar el render desde el software 3D...................................... 79
6.3.7. Combinar las vistas en el software de composición.................... 79
Conclusiones.............................................................................................................. 82
Bibliografía de referencia........................................................................................... 84
Bibliografía.................................................................................................................. 85

Índice de figuras
Figura 1: Cuevas de Lascaux....................................................................................... 12
Figura 2: Paralaje.......................................................................................................... 26
Figura 3: Tipos de paralaje........................................................................................... 30
Figura 4: Convergencia de ejes o Toe-in...................................................................... 34
Figura 5: Sistema de cámaras paralelas...................................................................... 38
Figura 6: Funcionamiento del modificador Skew.......................................................... 40
Figura 7: Sistema de cámaras paralelas usando el modificador Skew........................ 40
Figura 8: Sistema de cámaras con espejo.................................................................... 42
Figura 9: Zona de confort visual................................................................................... 47
Figura 10: Formatos de visión estereoscópica............................................................. 50
Figura 11: Resolución 5K.............................................................................................. 63
Figura 12: Arte conceptual 3D...................................................................................... 64
1
Introducción
El proceso de producción de una película está en constante progreso, nuevas
tecnologías son desarrolladas y permiten a guionistas y realizadores el acceso a nuevos
tipos de creatividad. En efecto, hoy en día el uso de la tecnología digital es un
denominador común en la cinematografía, tanto en los films hollywoodenses como en los
de bajo presupuesto y en este sentido, no es necesario que el film contenga grandes
efectos especiales, puesto que de todos modos, la tecnología digital siempre está
presente y muchas veces invisible al ojo del público.
Éstas nuevas tecnologías brindan a los cineastas equipos de producción, entornos
y flujos de trabajo que modifican de forma constante la manera de pensar y de crear
películas, y es así que se logra abrir paso a nuevas formas de comunicación. Hoy en día
la cinematografía digital apuesta fuertemente a la proyección de sus films usando la
técnica llamada Estereoscopía, que consiste en generar la ilusión de profundidad en una
imagen, causando en el espectador la sensación de ver el film en un espacio de tres
dimensiones.
Es importante aclarar que el término 3D en el cine se refiere a dos conceptos
distintos que suelen confundirse: el primero hace referencia a las imágenes generadas
por un ordenador, que se basan en modelos 3D virtuales de distintos objetos; y el
segundo al término 3D que se utiliza vulgarmente para referirse a las películas
estereoscópicas, en las cuales las imágenes se visualizan a través de gafas especiales
haciendo creer al espectador que los personajes salen de la pantalla y que los escenarios
tienen una verdadera profundidad. Resulta llamativo el hecho de que en el primer caso, el
proceso comienza desde un ordenador manejando objetos con características
tridimensionales mediante un software especializado, pero que su resultado final una vez
terminado el trabajo es en 2D, perdiendo así su volumen característico, mientras que en
2
el segundo caso el resultado final genera en el espectador la ilusión de ver imágenes 3D
reales y el mismo puede o no haber sido generado con imágenes en 2D. Es importante
explicar que las proyecciones cinematográficas tradicionales en todas sus formas se
traducen siempre en imágenes en 2D, por más que los objetos que componen la misma
hayan sido trabajados en un software que maneja gráficos en 3D.
En el ámbito académico, las universidades de Argentina ofrecen distintas carreras
audiovisuales, en algunos casos están más orientadas a la cinematografía clásica, como
es el caso de la Universidad de Buenos Aires (UBA) y en otros más relacionadas al
campo del arte digital audiovisual, web y multimedia, siendo el caso de la Universidad de
Palermo (UP). Ambas carreras tienen el mismo nombre: Diseño de Imagen y Sonido,
aunque sus orientaciones sean distintas. Es posible que sea el caso de una carrera que
está tratando de definirse y de consolidarse y a causa del avance de sus distintas
aplicaciones en el campo profesional, la propuesta académica ofrece distintas
orientaciones. La situación reside en que la técnica de la estereoscopía resulta aún muy
novedosa para ser incluida formalmente en sus planes de estudio, siendo un tema que
está tomando cada vez más relevancia en el ámbito profesional, por lo que el autor de
este escrito considera importante incorporar como complemento de la formación
académica. Es por eso que este Proyecto de Graduación se propone investigar esta
técnica en profundidad, con el fin de comprender cómo funciona y poder llevar la teoría a
la práctica, generando material audiovisual estereoscópico y un videotutorial que explique
paso a paso su proceso, para así poder complementar y colaborar con la formación
académica de los estudiantes interesados en esta especialidad.
La metodología utilizada en el presente Proyecto se basa en el análisis y
observación de las técnicas estereoscópicas pre-existentes y actuales para luego aplicar
el conocimiento adquirido de forma práctica.
3
En el primer capítulo se comenzará por definir de qué trata el Diseño de imagen y
sonido y qué campo de acción abarca. Luego se hará un análisis sobre la vuelta de la
estereoscopía al cine, para indagar sobre los motivos de su reincidencia y qué objetivos
persigue la industria con el uso de esta técnica. A continuación se realizará una
perspectiva histórica de la estereoscopía, en la cual se especificará cómo y cuándo se
inició la técnica, quién fue el autor de la misma y qué aplicaciones tuvo en épocas
pasadas. También se hablará sobre la fotografía estereoscópica ya que fue el soporte
que se usó en las primeras pruebas llevadas a cabo para luego ser aplicado en el campo
audiovisual. Para concluir este capítulo se desarrollarán conceptos relevantes acerca de
la visión estereoscópica, desde el punto de vista de la ciencia. Se abordarán temas
puntuales explicando al lector cuáles son los efectos físicos y biológicos que ocurren para
que el cerebro humano perciba, mediante la mezcla de dos imágenes, un espacio con
profundidad.
En el segundo capítulo se comenzará por introducir al cine 3D como industria, se
definirán los conceptos básicos pertinentes a la estereoscopía para poder situar al lector
en la temática y comenzar a familiarizarlo con las características propias de la misma. De
esta manera se especificará la diferencia entre una imagen estereoscópica y una imagen
sin ilusión de profundidad. Para ello no solo será necesario esclarecer conceptos
puramente técnicos relacionados a la estereoscopía en sí, sino también a lo que sucede
con el cuerpo humano al momento de presenciar la proyección. En este capítulo se
explicarán en profundidad los conceptos relacionados a la aplicación de la técnica
estereoscópica, por lo que su contenido será de carácter técnico.
En el tercer capítulo se desarrollarán los distintos sistemas de cámaras y las
técnicas que se utilizan actualmente para producir una imagen 3D. Se desarrollarán
conceptos pertinentes referidos a la producción cinematográfica estereoscópica aplicados
en la producción digital por computadora y en la producción en set de filmación.
4
Finalmente se detallarán cuestiones importantes a tener en cuenta para poder visualizar
de forma correcta material 3D estéreo.
A partir de aquí se habrá compuesto un material audiovisual estereoscópico listo
para exhibir, ¿pero de qué manera?. En el cuarto capítulo, se hablará de los distintos
formatos que existen y de los métodos de visualización y proyección de un material
estereoscópico, por lo tanto se nombrarán los tipos de gafas disponibles y las formas de
proyectar y de visualizar.
El quinto capítulo estará dedicado a reflexionar y analizar la estereoscopía. Cómo
afecta la decisión de filmar en 3D en el proceso de producción de una película y en los
distintos departamentos técnicos y artísticos. También se analizará a la estereoscopía
como complemento narrativo, cómo se la utiliza para dar sentido a la trama. Para ello se
tomará como objeto de análisis la película El Hobbit: Un Viaje Inesperado (2013) dirigida
por Peter Jackson, una adaptación de la novela El Hobbit, del autor británico de novelas
fantásticas John Ronald Reuel Tolkien.
La fase exploratoria se verá reflejada en un videotutorial que explicará el
procedimiento a seguir para producir, mediante un software de animación 3D, material
estereoscópico, aplicando los conceptos teóricos y técnicos adquiridos. También se
presentará material audiovisual de tipo experimental, como resultado del proceso
explicado. Se considera relevante compartir con el lector la experiencia que implicó la
realización del material que se presenta, mencionando cómo fue el proceso de trabajo y
qué dificultades se hicieron presentes. El sexto capítulo estará dedicado a tal fin, para
relatar y compartir con el lector no solo la experiencia en sí, sino también información
técnica que funcione como soporte escrito del videotutorial.
De tal manera este Proyecto de Graduación se enmarca en la línea temática
Nuevas Tecnologías. Pertenece a la categoría de Proyecto de Creación y Expresión.
5
Tiene como objetivo dar a conocer la técnica de la estereoscopía a través de la
producción de un videotutorial que explique paso a paso el proceso de la misma, en este
caso mediante el uso del software Autodesk 3ds Max 2010. Por consiguiente su aporte
pretende ser el de brindar a los estudiantes de Diseño de imagen y Sonido y carreras
afines, material pedagógico para que puedan, de forma teórica y práctica, incorporar un
tema de actualidad poco conocido no solo en el ámbito académico argentino, sino
también en el profesional y el cual el autor de este trabajo considera importante para
asimilar como parte de la formación académica y profesional de un diseñador de imagen
y sonido.
Los trabajos de referencia de alumnos de la Universidad de Palermo que se toman
como antecedentes para realizar este Proyecto de Graduación son los siguientes: La
estereoscopía como herramienta de comunicación audiovisual de Sebastián Pablo
Fernández (2011), De Garía Ferré a Gaturro en 3D de Carolina Hebe Rodríguez (2011),
Animación 3D en Argentina de Andrés Eduardo Alal (2011), De las cuevas prehistóricas
hasta Pixar Animations de María Tatiana Figueroa (2012), La narrativa audiovisual y los
efectos especiales en los videoclips de Estefanía Villanueva (2012), Media Art de María
Emilia Abot (2011) y Motion capture de Lucas Martín Mastroleonardo (2012).
6
Capítulo 1: Conceptos introductorios
En este capítulo se comenzará por introducir a la carrera Diseño de imagen y
sonido y sus contenidos. Luego se hará una reseña histórica de la estereoscopía, sus
principios en la fotografía y posteriormente en el cine y los primeros estudios científicos
que se hicieron sobre la visión en estéreo.
1.1. Diseño de imagen y sonido
Suele suceder en nuestro país que la sociedad en general tiene dificultades para
comprender a qué se dedica un Diseñador de imagen y sonido, la causa de esta
incomprensión resulta, entre otras cosas, de su corta vida académica. La carrera de
Diseño de imagen y sonido nació en las universidades de Argentina hace relativamente
poco tiempo y no son muchas las que la dictan hoy en día a comparación de otras
carreras de mayor antigüedad. De todas formas a medida que pasan los años se está
consolidando cada vez más y está creciendo académicamente. Esto corresponde a un
profundo proceso impulsado con el surgimiento de la era digital, el constante avance de
la tecnología y su presencia cada vez mayor en nuestra cultura social y en el mundo. Las
generaciones jóvenes forman parte de una revolución extraordinaria en lo que respecta a
la tecnología y a los nuevos lenguajes gráficos digitales que nacen y evolucionan
constantemente. Por ello resulta coherente que generaciones que no formaron parte
desde temprana edad de este proceso no comprendan con claridad el campo de acción
de esta carrera.
El Diseño de imagen y sonido es una disciplina que resulta de la mixtura de otras,
es la integración de distintas especialidades relacionadas al diseño gráfico y al lenguaje
audiovisual, hoy por hoy ambos campos están estrechamente relacionados en su
aplicación profesional con la tecnología.
7
De las diferentes formas de denominación de esta forma de comunicación el concepto de diseño audiovisual es el que he escogido como el término más adecuado hasta el momento. Desde su definición literal y acepción más amplia abarca todo lo concerniente a la planificación y construcción formal de productos audiovisuales. Sin embargo, para la siguiente reflexión he decidido basarme en los contenidos presentados por Rafael Ràfols y Antoni Colomer en su libro Diseño Audiovisual. Según la interpretación que le doy a dicho texto, no es más que diseño gráfico en el medio audiovisual, lo cual implica que tiene a su disposición todo el catálogo formal que utiliza el diseño gráfico pero con una concepción de tiempo y espacio característicos del lenguaje audiovisual. (Bohórquez, 2008)
Bohórquez (2008) explica en su artículo que esta disciplina nace del cine y del
concepto de montaje cinematográfico del siglo XX, el cual se caracteriza por la
fragmentación espaciotemporal de una secuencia para estructurar narrativamente un
mensaje. A partir de 1920 comienza a surgir un cine experimental en el cual se realizan
animaciones de dibujos cuadro a cuadro que producen una gran influencia. A causa de
esto y del surgimiento de la televisión como medio masivo de comunicación, en la década
del 50 comienzan a presentarse las primeras manifestaciones del diseño de créditos
cinematográficos. El cine se convierte en una industria del entretenimiento y comienza a
hacer uso del diseño gráfico como herramienta indispensable no solo para su promoción
gráfica impresa, sino también para realizar secuencias animadas gráficas como
introducción de sus películas.
Es así que estos dos grandes campos, el del diseño gráfico y el del cine o
comunicación audiovisual, comienzan a articularse para dar vida a nuevas disciplinas.
La relación entre diseño gráfico y lenguaje audiovisual es cada vez mayor, al punto de haber llegado a consolidar una forma de comunicación que fusiona los dos campos; de ahí que hayan surgido términos como motion graphics, diseño audiovisual, design cinema, diseño 4D, diseño gráfico en movimiento, grafismo televisivo, etc... (Bohórquez, 2008, p. 58)
En esta gran mixtura de disciplinas comienzan a surgir nuevas técnicas y
tendencias. Hoy en día es normal ver en el cine y en la televisión la presencia de actores
8
reales con la integración de contenido 2D y 3D generado digitalmente, y efectos
especiales filmados en set, pero agregados en post-producción en capas separadas a la
filmación original. Esto comienza a proporcionar a los cineastas y guionistas, la
posibilidad de romper cualquier tipo de límite en sus relatos, y poder pensar en universos
y situaciones que antes hubieran sido imposibles de crear.
1.1.1. Especialidades de la carrera
Esta carrera al estar hoy en día en constante evolución y crecimiento ha sido
comprendida con distintas orientaciones en las universidades de Argentina, aunque
manteniendo siempre una misma base estructural: la comunicación y el lenguaje
audiovisual. Es por ello que hablar de las especialidades de la carrera se relaciona
directamente con la universidad en cuestión y pueden haber pequeñas variantes. Por
ejemplo, la UBA ofrece una carrera orientada fuertemente a la cinematografía y al
lenguaje audiovisual, con poco contenido teórico de diseño gráfico, y nulo contenido de
animación 2D y 3D, web e interactividad con excepción de alguna materia electiva en el
último año. En cambio, la UP ofrece un plan de estudios que se orienta a un abanico más
amplio de temáticas, estando presente el diseño gráfico, el cine y el lenguaje audiovisual,
el diseño web, la interactividad y la animación 2D y 3D. Esto no quiere decir que una
carrera sea mejor que la otra, sin embargo es interesante analizar el hecho de que
distintas universidades ofrezcan propuestas académicas considerablemente diferentes de
una carrera que tiene el mismo nombre y título.
Es claro que aún es una disciplina nueva que a diario desafía sus propios límites y
campos de acción. Por lo que dependerá de los estudiantes y de sus intereses
personales la orientación que le darán a su carrera, y esta elección estará directamente
relacionada con el ámbito académico en donde prefieran realizar sus estudios. Siendo
una carrera que constantemente encuentra nuevos campos de acción junto al desarrollo
9
tecnológico, el autor de este trabajo considera indispensable que el estudiante o
profesional del Diseño de imagen y sonido se especialice en un campo en particular.
1.1.2. El lugar de la estereoscopía
En una producción audiovisual se identifican siempre tres grandes etapas, la
preproducción, la producción y la postproducción. La estereoscopía aún no tiene un lugar
específico dentro de alguna etapa de este proceso, ya que como veremos más adelante
puede ser realizada en su totalidad en la etapa de postproducción convirtiendo una
película 2D a una 3D, o bien planteando la filmación de la película desde un principio de
forma estereoscópica, formando parte así de todas las etapas. El técnico profesional
responsable a llevar a cabo este proceso es el supervisor de postproducción o supervisor
de efectos visuales, quien es un técnico altamente calificado. Será el encargado de
realizar el seguimiento y aplicar correctamente la técnica de la estereoscopía en el set de
filmación durante la producción y en la etapa de la postproducción. Por lo tanto la
estereoscopía deberá ser asimilada, como complemento de su formación, por aquellos
estudiantes o profesionales que se dediquen a este campo. Se intentará comprender a
continuación el motivo por el cual se comenzó a utilizar nuevamente esta técnica.
1.2. El renacimiento de la estereoscopía
Haciendo un análisis retrospectivo sobre el cine, es importante nombrar que en la
cinematografía clásica el montaje siempre se ha encargado de borrar las huellas de
enunciación del narrador, con esto se buscaba que el espectador vea la película
olvidándose de los artilugios técnicos utilizados durante el rodaje y el montaje para
percibir el relato de forma continua e ininterrumpida, inmerso ahora en una nueva
realidad:
Concretamente, esta "impresión de continuidad y homogeneidad" se ha obtenido de un trabajo formal que caracteriza el período de la historia llamado a
10
menudo "cine clásico", y cuya idea más representativa es la de raccord (enlace). El raccord cuya existencia concreta se deduce de la experiencia de montadores del "cine clásico durante decenios, se definiría como todo cambio de plano insignificante como tal, es decir, como toda figura de cambio de plano en la que se intenta preservar, a una y otra parte del corte, los elementos de continuidad. (Aumont, Bergala, Marie, Vernet, 2008, p. 77)
El objetivo de este tipo de montaje es lograr que la narración fluya naturalmente y
que el espectador al visualizar la película, perciba una realidad continua y homogénea.
Es lo que el teórico de cine André Bazin define como el cine de la transparencia, en el
cual el film tiene como función principal dejar ver los acontecimientos representados y no
dejarse ver a sí mismo como film, el mismo autor define que en todos los casos, la
finalidad del film debe ser la de proporcionar al público la ilusión de asistir a sucesos
reales que tienen lugar como en la vida cotidiana. (A. Bazin, 1973)
Con esto se puede concluir que uno de los motivos por los cuales el público asiste
al cine es para vivir la experiencia de formar parte de otras realidades dentro de la ilusión
y magia cinematográfica. Es por ello también -siempre refiriéndose al cine clásico- que la
mayoría de los relatos tratan temáticas en las cuales el espectador se pueda sentir
identificado, no solo con los temas tratados sino también con los personajes y los actores
que los interpretan; el público quiere formar parte de esta gran ilusión de otra realidad.
Por mucho tiempo esto funcionó y fue lo que atrajo al público a las salas de cine, ya que
era el único lugar donde podían atravesar esta experiencia.
Hoy en día con el avance de la tecnología y la incorporación hogareña de distintos
equipos digitales, que permiten a los usuarios poder visualizar películas en sus casas en
alta definición con sonido envolvente, y esto sumado a las descargas de películas por
internet, la industria cinematográfica se ha visto seriamente afectada. Esto ha provocado
una gran crisis a nivel comercial ya que gracias a estos motivos las salas comenzaron a
11
perder su público, la gente comenzó a tener su propio cine hogareño. Es así como el
resurgimiento de la estereoscopía responde a la búsqueda de una solución a esta crisis.
Frente a esta situación, las grandes compañías pretenden brindarnos un nuevo producto audiovisual que pueda captar al público para hacerle regresar a las salas ya que éstas se encuentran más vacías en los últimos años. De la misma manera que en la década de los cincuenta las majors pretendían hacer sombra a la nueva competidora la pequeña pantalla electrónica mediante la explotación comercial de los formatos panorámicos, en la actualidad nos encontramos ante el 3D que intenta ser el revulsivo de la industria gracias a la complicidad de la revolución digital. (García, P. F. 2011, p. 1160)
La tecnología 3D aumenta el grado de inmersión del espectador en la película, le da
la posibilidad de interactuar con la imagen cinematográfica, y pretende ser hoy en día la
respuesta a esta gran crisis que atraviesa el cine. Pero esto resulta paradójico, ya que
como veremos en el próximo capítulo, el cine 3D estereoscópico no es ninguna novedad,
es hasta incluso más antiguo que el propio cine. A diferencia de las primeras apariciones
del cine estéreo, hoy los avances tecnológicos acompañan las necesidades técnicas de
este tipo de proyección y posiblemente estemos hablando del inicio de un nuevo
paradigma en cuanto a la estructura y proceso de una realización audiovisual. Pero como
ha pasado con todo gran cambio que se haya dado en la industria cinematográfica, ya
sea el pasaje del blanco y negro al color o el comienzo del uso del sonido y de su
evolución hasta llegar al sonido envolvente digital, se requiere un tiempo lógico de
asimilación y respuesta del público.
Para comprender los motivos que llevaron a que esta técnica haya fracasado
durante sus primeras modas, se expone a continuación un relevamiento histórico.
1.3. Orígenes de la estereoscopía
El Dr. Manuel Carlos Fernández Sánchez, profesor en tecnología de los Medios
Audiovisuales de la Universidad de Sevilla, explica en su artículo Imágenes en tres
12
dimensiones que el arte de las imágenes en tres dimensiones ha nacido con el hombre
mismo. Los primeros dibujos que se descubrieron ya pretendían representar la forma
tridimensional. Esto puede apreciarse una de las cuevas más antiguas descubierta en el
año 1940, la cueva de Lascaux, Francia, que registra una antigüedad de más de 16.000
años. Los especialistas aseguran que no es producto de la casualidad sino que las
representaciones de animales, en su mayoría de ciervos y búfalos en escena pintados a
la luz de una antorcha, se muestran revelando alto, ancho y profundidad. (Sánchez, F.,
2000)
Figura 1: Cuevas de Lascaux. Fuente: http://www.lascaux.culture.fr
En el siglo III (A.C.), el matemático griego Euclides, escribió un tratado llamado
Óptica y en sus teoremas 23 y 28 explica el problema geométrico de mirar una esfera con
los dos ojos, diciendo que, si se observa una esfera cuyo diámetro es menor a nuestra
distancia interocular -distancia entre los dos ejes visuales-, se ve más que una
hemiesfera. Hace además, la interesante descripción de la relación entre la visión
estereoscópica y la condición biológica del ser humano de disponer de dos ojos . Así
nacía el concepto de la visión binocular. En el siglo II (A.C.), el célebre y, actualmente
muy referenciado en tratados científicos, médico Galeno, también de origen griego, en su
tratado Acerca del uso de las partes del cuerpo humano profundizó la teoría razonada de
la visión de la perspectiva a través de los dos ojos, puesto que observó que al cerrar un
ojo, la imagen circundante cambiaba. (Sánchez, F., 2000)
13
Antes del siglo XV la pintura europea se solía manifestar más en las decoraciones
de las iglesias con motivos religiosos, en un estilo artístico sin profundidad o perspectiva.
Con el advenimiento del Renacimiento los pintores tienen nuevos clientes
adinerados, príncipes y reyes, que les demandan representaciones más realistas y aquí
los artistas comienzan a pintar con perspectiva y se inicia así el desarrollo del espacio
tridimensional. Leonardo Da Vinci codificó los puntos de profundidad monocular, entre
ellos las reglas de la perspectiva rectilínea. La primera fotografía estereoscópica se logró
con una sola cámara, moviéndola 6 cm entre una foto y la otra. Esta medida de 6cm no
es al azar, es la distancia que existe entre los ejes de ambos ojos. (Epelbaum S., 2012)
Recién en la década de 1830 Sir Charles Wheatstone, físico escocés, inventa el
primer dispositivo que reproduce la tridimensionalidad y lo bautiza con el nombre de
estereoscopio. Era un aparato sencillo, conformado por dos espejos colocados en ángulo
respecto del observador y una imagen situada frente a cada espejo. Wheatstone llega a
la conclusión de que la percepción en relieve es recibida y plasmada en la retina humana
por la diferencia visual de cada ojo. Este físico observó que las pequeñas diferencias
entre las imágenes proyectadas a los dos ojos ofrecen una sensación vívida de la
profundidad del espacio 3D. Nace así el término estereopsis, que proviene del griego y
que significa sólido y visión, este concepto se desarrollará en profundidad más adelante.
(Sánchez, F., 2000).
Años más tarde un científico naturalista escocés llamado David Brewster, es el
autor de la primera cámara fotográfica estereoscópica llamada estereoscopio, construida
en 1849 y sus fotografías se visualizaban con un visor con lentes, una especie de gafas
para poder enfocar las imágenes desde cerca. (Sánchez, F., 2000)
En 1851, la Reina Victoria de Inglaterra se interesó en las fotos estereoscópicas y
en "La Gran Exhibición" de Londres, David Brewster le regala a la Reina un ejemplar de
14
su cámara, con la intención de que la prensa difunda el dispositivo de su creación, dando
empuje así a la promoción del 3D. Sin duda alguna que logró su cometido puesto que en
los siguientes cinco años se venden 500.000 estereoscopios en Inglaterra, determinando
esto, además, el ingreso del estereoscopio en América. (Epelbaum S., 2012)
En 1859, el poeta y médico Oliver Wendel Holmes, diseñó un estereoscopio,
basado en el diseño de Brewster, que tiene mucho éxito en Norteamérica. La expansión
del uso del aparato de Brewster, tuvo su época de gloria hasta que el uso y abuso de la
comercialización de las monturas, fueron bajando la calidad de las imágenes que se
veían defectuosas terminando en una doble imagen o una sensación molesta para el
espectador. Además los usuarios comenzaron a ver la incomodidad de que el
estereoscopio podía ser utilizado por una sola persona por vez y era molesto de sostener
y manejar. La convergencia de estas circunstancias determinaron la decadencia de la
primera moda del 3D. (Epelbaum S., 2012)
De forma paralela a esta era comercial, los científicos comenzaron a estudiar la
psicología de la percepción y la fisiología del ojo, sobre todo la estereopsis. En este
desarrollo se destacaron, el físico Hermann von Helmholtz, quien en su libro Optik
describe por primera vez las imágenes en movimiento de manera estereoscópica, y el
inventor Johann Czermak quien produce una especie de zootropo vertical (1855) al que
llamó estereoforoscopio en el cual utilizaba un disco octogonal con perforaciones y
espejos internos que reflejaban los pares de imágenes, también Phillppe Benoist
construyó un estereoscopio animado. (Epelbaum S., 2012)
Para completar la evolución histórica de la tridimensionalidad, se puede agregar
que en 1928, el inventor de la Polaroid, Edwin Land, descubrió los filtros polarizados que
sirven para eliminar la luz del día que se refleja en cualquier superficie y girando el filtro
se puede hacer destacar una imagen sobre otra. (Epelbaum S., 2012)
15
En la pantalla grande, en 1937, la Metro Goldwyn Mayer, produjo una comedia
titulada Asesinato en tercera dimensión, filmada con una cámara apropiada, pero aún la
técnica seguía careciendo de realismo. (Sánchez, F., 2000)
Con la introducción de los anaglifos, imágenes en dos dimensiones capaces de
provocar un efecto tridimensional cuando se ven con lentes especiales que tienen un
color distinto en cada lente, correspondiente al ojo izquierdo y derecho. Hubo un avance
en este campo, sobre todo por su bajo costo, sin embargo se le adjudicaron algunas
falencias como la difusión de los colores de un ojo a otro y la sensación de malestar que
experimentaban algunos espectadores como náuseas y cefaleas puesto que cada ojo
recibe la imagen con un color diferente. (Sánchez, F., 2000)
Los anaglifos fueron superados por la estereoscopía de luz polarizada. En este
método las dos imágenes, derecha e izquierda, se proyectan a través de dos filtros
polarizantes con orientaciones perpendiculares en una pantalla metalizada que conserva
la dirección de la polarización. La imagen para el ojo derecho es polarizada en un
sentido, por ejemplo vertical, mientras que para el ojo izquierdo se polariza en sentido
horizontal. Esta técnica presenta dos grandes ventajas sobre los anaglifos, por un lado
reduce la fatiga visual, y por otro mejora la calidad de la imagen en términos de color. La
Warner Bros produjo en 1952, El crimen perfecto de Alfred Hitchcock en 3D por luz
polarizada. La estereoscopía en aquella época tuvo una breve popularidad y su
obsolescencia se vio acelerada por la aparición del cinemascope. (Sánchez, F., 2000)
La ingeniería cinematográfica siguió buscando nuevas alternativas, llegando a un
nuevo método, la estereoscopía por obturación: su funcionamiento se basa en la
obturación de un ojo cuando el ojo contralateral recibe la imagen y viceversa. Esto se
realiza de una manera muy rápida y alternativamente, la zona receptora del cerebro
fusiona las imágenes en una sola y la representación mental resulta tridimensional. Este
16
sistema funciona con gafas inalámbricas, pero algo pesadas, aunque no limitan los
movimientos del observador. En 1967 se presenta en Canadá el sistema Imax, el cual
rueda en negativo de 65mm, con 15 perforaciones, proyectando así películas de mayor
tamaño y definición, casi 9 veces más grande que los sistemas convencionales, con un
único y potente proyector con doble transporte de película. En este sistema se usan filtros
polarizadores más eficaces, con lentes de mayor tamaño para ajustarse a sus grandes
pantallas de 20 a 30m de altura. Recién a partir de los años 80', gracias al sistema Imax,
fue posible crear películas estereoscópicas de buena calidad, acontecimiento que ayudó
a una nueva popularización de esta tecnología. (Sánchez, F., 2000)
1.4. Descubrimientos científicos
Se aborda en este apartado el estudio científico del aspecto psicológico de la
Estereopsis, resorte de la neurociencia -ciencia que estudia el sistema nervioso- que ha
establecido las bases para comprender la recepción de las imágenes en 3D. Es
importante destacar que esta disciplina dice que el ser humano vive en un mundo de
cuatro dimensiones, o al menos así lo percibe. La dimensión del tiempo pudo quedar -
congelada- con el primer proceso fotográfico de aplicación práctica presentada por
Francois Arago en Paris en 1839, el daguerrotipo, luego perfeccionado con la fotografía.
Más adelante nace el cine, a finales del siglo XIX. Con el perfeccionamiento de la técnica,
el cine tradicional desarrolla un espacio en dos dimensiones: largo y alto y simula la
tercera: profundidad, mediante las técnicas de la perspectiva plana. (Sánchez, F., 2000)
En la neurología, -especialidad médica que trata los trastornos del sistema
nervioso-, para que exista la percepción tridimensional no solamente son necesarios los
dos ojos en perfecto estado sino también el cerebro. Mediante el V par craneano,
denominado nervio óptico, su recorrido lineal y entrecruzamiento quiasmático, entrega a
la zona de receptores ópticos una imagen íntegra y total que recompone al observador el
17
carácter tridimensional de la imagen. Para que ocurra esto los dos ojos deben estar
mirando hacia el frente. Esta facultad comienza a manifestarse a los dos meses de vida
para terminar de desarrollarse alrededor de los cinco o seis años. Cuando los ojos
enfocan un objeto, ambos convergen hacia el objeto. La convergencia es binocular y esto
se produce por la acción de los músculos periorbitarios -situados alrededor de la órbita
ocular- que se contraen y relajan según sea la distancia del objeto, éstos músculos
controlan el movimiento de los ojos. Cuanto más cerca está el objeto mayor será la
convergencia, si el objeto está lejano se hace pequeño, y a una distancia mayor de seis
metros, la visión se hace monocular. Esta acción ocular es captada por la propiocepción,
es decir la percepción del cerebro respecto de su postura u orientación. (Sánchez, F.,
2000)
1.4.1. Disparidad binocular y estereopsis
El ser humano posee, por naturaleza propia, un mecanismo de visión estéreo, sus
ojos están separados por una distancia de 65mm aproximadamente en el caso de una
persona adulta, y debido a esta separación percibe dos perspectivas distintas de cada
objeto que observa. Esta pequeña diferencia que existe entre ambas imágenes obtenidas
de la misma realidad es denominada disparidad binocular y corresponde a la distancia
horizontal entre las imágenes izquierda y derecha que luego la retina de cada ojo
convierte en señales eléctricas, las cuales son enviadas a través del nervio óptico al
cerebro. Esta información dual es procesada por el cerebro, que interpreta y fusiona
ambas imágenes recomponiendo así una única imagen tridimensional, este proceso es
denominado estereopsis, el cual es una de las vías binoculares para la percepción de la
profundidad junto con las otras de carácter monocular. De esta manera el ser humano
logra percibir la sensación de lejanía o cercanía de cada objeto de su entorno, pudiendo
distinguir no solo la profundidad sino también la dimensión y el volumen de cada
elemento.
18
1.4.2. Indicios monoculares
Respecto de los estudios sobre la fisiología ocular, los científicos descubrieron
que la imagen retiniana es binocular, mientras que la perspectiva es monocular, al igual
que la fotografía tradicional. Por ejemplo, en la pintura, la fotografía, el cine y la televisión
se encuentran tres dimensiones, pero solo dos de ellas son reales: el largo y el ancho de
la pantalla, pero ¿qué sucede con la tercera dimensión? Se aprecia el relieve mediante la
perspectiva, por consiguiente, un cuadro tiene la tercera dimensión gracias a la
perspectiva, que es la técnica de representar en una superficie plana un objeto de tres
dimensiones, es decir, la perspectiva representa una escena de tres dimensiones, en
solamente dos. Es un artilugio técnico basado en las leyes de la geometría. Pero no solo
la perspectiva hace que percibamos la profundidad de una imagen 2D. Una de cada 20
personas no tiene la capacidad de ver de manera estereoscópica, por lo tanto ve una
imagen en dos dimensiones de la realidad, y en la mayoría de los casos no se dan cuenta
de ello.
Existe un caso muy famoso de la Dra. Susan R. Barry, neuróloga estadounidense y
autora del libro Fixing My Gaze, traducido al español como Ver en estéreo, quien padeció
de chica de estrabismo y fue operada a los meses de vida, esto le trajo como
consecuencia la imposibilidad de percibir el mundo en estéreo hasta los 48 años de edad.
Antes de esto no fue consciente de esta imposibilidad. (Barry, SR. 2009)
Estas personas, junto a las que nacen con un ojo ciego, deben aprender a
manejarse en el espacio reconociendo la profundidad y el volumen de los objetos sin
tener una visión binocular, pero ¿cómo es posible? La percepción de profundidad se
genera en gran parte por la visión binocular, pero también por recursos e indicios
monoculares, por lo tanto una persona que ve únicamente con un ojo o que padece la
capacidad de focalizar ambos ojos en un mismo punto -y por ello debe omitir la

19
información de uno-, extrae información 3D a partir de una vista 2D en base no solo a la
perspectiva, nombrada anteriormente, sino a distintas señales o indicios monoculares
Mendiburu, B. (2009)
- Superposición: Si un determinado objeto se superpone a otro, el cerebro
interpreta que el objeto que está por delante se encuentra más cercano que el
otro.
- Tamaño relativo: El hombre tiene memoria de las formas de los distintos
objetos que conoce, por lo tanto recupera esa información cada vez que visualiza
nuevamente ese objeto. Mediante el conocimiento del tamaño de los mismos, el
cerebro percibe por comparación qué objeto está más cercano que otro. Ej.: Si un
auto se ve más pequeño que otro, entonces significa que está más lejos en el
espacio que el primero.
- Perspectiva: La perspectiva es uno de los recursos más importantes de los
pintores o dibujantes para generar profundidad en una imagen. Del mismo modo
el cerebro percibe la perspectiva y utiliza esa información para captar la
profundidad de los objetos, la fuga o convergencia de las líneas hacia
determinados puntos en el espacio ayudan a percibir esta información.
- Posición en relación al horizonte: Cuando la visión de una persona choca
contra el suelo, define un final de su rango de visión, el otro final es el horizonte. A
medida que los objetos se alejan del punto de visión del hombre, se acercan al
horizonte. Todos los objetos están ordenados por su posición relativa al mismo.
- Textura o gradiente: Si se visualiza una textura con un patrón repetitivo, se
hará más pequeño a medida que se aleja hacia el horizonte, Ej.: los barrotes
20
verticales de una gran reja. El cerebro interpreta que la parte pequeña del
gradiente se encuentra más lejana que la parte menos pequeña.
- Atmósfera: Los objetos más lejanos se ven con menos saturación que los
cercanos a causa de los distintos gases de la atmósfera.
- La iluminación y sombras: La fuentes de luz, los reflejos y las sombras
brindan información acerca de la profundidad en el espacio de los objetos y
también de su altura y contacto con las superficies que los rodean. Ej.: Si un balón
de fútbol tiene su sombra separada a una distancia determinada, el cerebro
percibe que este objeto no se encuentra en contacto con la superficie del piso.
- El movimiento de paralaje: Cuando existe una velocidad constante, los
objetos cercanos se desplazan más rápido ante la visión que los objetos lejanos,
por ello el hombre percibe que los primeros se ubican más cercanos a los
segundos. Este mecanismo se ve reflejado claramente cuando se observa desde
la ventanilla de un automóvil en movimiento.
- Velocidad relativa de los objetos: El mejor ejemplo para graficar este punto
es el caso de un avión desplazándose lentamente a cientos de kilómetros. La
velocidad relativa de los objetos conocidos dan información sobre su posición en
el espacio.
Cabe destacar aquí que hay diversos tipos de perspectiva:
a) La perspectiva lineal: es el procedimiento apropiado que se aplica en el dibujo
para representar las tres dimensiones en un plano de solamente dos.
b) La perspectiva cromática o tonal: es válida para incrementar la sensación de
profundidad en el espacio mediante los distintos tonos de color. Se utiliza en la pintura.
21
c) La perspectiva aérea: es propia del cine, la televisión y la fotografía. En ella los
objetos próximos se ven nítidos y los lejanos borrosos (el ojo admite la bruma como
sinónimo de profundidad y espacio).
d) La perspectiva cinética: es propia del cine y la televisión. Este procedimiento
fue utilizado por los hermanos Lumiere en los comienzos del cine. Se debe al movimiento
en diagonal de los objetos. Un claro ejemplo de esto se ve en el film Llegada de un tren a
la estación (1895), donde el tren se precipita hacia los espectadores, quienes creen que
el mismo está a punto de atropellarlos. Es un recurso muy utilizado en el cine de acción.
(Sánchez, F., 2000)
22
Capítulo 2: Fundamentos del cine estereoscópico
En este capítulo se hará una introducción sobre la industria del cine 3D para luego
abordar conceptos teóricos relacionados a la estereoscopía y a su técnica. Para el
desarrollo de todos los conceptos técnicos explicados en este capítulo se utilizará como
fuente principal de consulta el libro 3D TV and 3D Cinema: Tools and Processes for
Creative Stereoscopy (2012) del experto en estereoscopía digital Bernard Mendiburu, una
publicación de la compañía Autodesk disponible en su sitio web oficial, llamada
Stereoscopic Filmmaking Whitepaper. The Business and Technology of Stereoscopic
Filmmaking (2008) y material pedagógico grabado en video del especialista en animación
3D y efectos visuales Luis Marcoux, recopilado del mismo sitio oficial de Autodesk.
2.1. La industria del 3D
La estereoscopía es una técnica que fue inventada hace muchos años, sin embargo
la industria del 3D es bastante nueva, hace 15 años las producciones en 3D no eran tan
frecuentes como ahora. Por este motivo, cada vez son más los profesionales que se
especializan en esta materia.
A causa de ser una industria reciente y además por lo novedoso de la
cinematografía digital en 3D, hay muchas preguntas que surgen a medida que se
plantean mayores desafíos a nivel de producción, que todavía no tienen una respuesta.
Por este motivo los estudios prefieren invertir en realizar sus propias investigaciones
mediante departamentos de desarrollo profesional internos, en vez de contratar expertos
externos.
Lo más importante es recordar que el 3D es mucho más que un par de imágenes
animadas en 2D y las disparidades en las mismas se perciben como fallas, de ahí la
importancia de tener extremo cuidado en todos los detalles técnicos que conforman la
23
realización de cada toma. Cada pixel es afectado por cualquier acción en el proceso de
producir una película y es por ello que hasta los errores más pequeños hacen que una
toma pierde credibilidad. Incluso, en algunos casos, una mala imagen puede causar
molestias visuales en la audiencia, como dolor de cabeza o mareos, si no fue trabajada
de manera correcta.
2.1.1. La complejidad del cine 3D
Lograr un resultado visual distintivo en el mundo de la estereoscopía puede resultar
una tarea difícil de lograr, ya que cualquier error, por más pequeño que sea, puede hacer
que el trabajo entero se vea mal, al punto de que no parezca real. Este es uno de los
mayores desafíos que se presentan a la hora de trabajar de forma estereoscópica, los
detalles deben ser trabajados con cuidado ya que cada uno de ellos hace a toda la
experiencia en 3D. Si en algún momento del proceso de producción el 3D no fue
trabajado de forma correcta, el precio de una corrección posterior puede pagarse muy
caro, por lo que las compañías evitan cometer errores que luego les resulten grandes
sumas de dinero. Existen muchos casos en los cuales las películas nunca llegaron a ser
transmitidas, o lo fueron pero con muy poco éxito por errores de este tipo. Por este
motivo se valora mucho al profesional con verdaderos conocimientos en este rubro,
mucho más en este momento en el cual hay un auge de películas estereoscópicas.
A esta complejidad se suman dificultades técnicas y operativas, en una película
estereoscópica los recursos se duplican, ya que se deben producir dos visiones distintas
del mismo film y los requisitos y exigencias de calidad se triplican. Por lo tanto, las
películas en 3D requieren mucho más trabajo que las de 2D, ya que se debe manejar el
doble de datos de almacenamiento, manipulación y archivo. Se puede duplicar el número
de CPUs, discos duros y pantallas, ya que copiar y mover archivos puede tardar el doble
de tiempo que en el caso de una película en 2D. Los chequeos de calidad deben ser en

24
3D y deben coincidir ya que de lo contrario impide un correcto control estereoscópico del
par estéreo.
2.1.2. Cómo empezar
Todos los proyectos de películas en 3D son similares, y se puede ingresar al mundo
de la estereoscopía desde tres caminos: de manera individual, con un pequeño grupo de
trabajo o con un grupo de profesionales con el objetivo de producir una pieza de la más
alta calidad profesional.
- Primer nivel: autodidacta
Para quien recién está comenzando, no hace falta invertir demasiado en equipos,
solo se necesita una computadora personal, una cámara digital y gafas 3D. Se puede
considerar comprar equipos usados, que resultarán igualmente útiles que los nuevos,
pudiendo generar un recorte del presupuesto importante. Los primeros trabajos
realizados se pueden subir a internet y compartir con amigos en páginas como Youtube o
por redes sociales como Facebook, y así darse a conocer y recibir opiniones de usuarios.
- Segundo nivel: películas de bajo presupuesto
Una de las primeras formas de aproximarse al 3D es por medio de películas de bajo
presupuesto o comerciales, por lo general producidas por estudiantes y autodidactas.
Mediante el acceso a islas de edición con software adecuado e invirtiendo en alquileres o
compra de equipos. Las islas de edición más avanzadas mostrarán como utilizar equipo
genérico de 2D para producir una película en 3D. Se puede recurrir a programas como
Adobe Premiere o Adobe After Effects durante el proceso de producción. Muchas veces,
conocer gente con los mismos intereses también ayuda a consolidar proyectos
independientes que de otra forma no se podrían llevar a cabo. Con los equipos indicados
25
y la orientación correcta, es probable que un grupo logre un buen resultado con su
proyecto estereoscópico a un costo razonable.
- Tercer nivel: películas de alto presupuesto
Los proyectos más ambiciosos son las películas o cortos de alta calidad. Estos
implican grandes equipos de trabajo altamente capacitados y especializados, inversiones
de millones de dólares y varias semanas o meses de producción.
Los encargados del manejo de las operaciones deberán construir, comprar o
alquilar uno o más equipos de 3D, controlar la compatibilidad de todos los equipos y
prepararlos para manejar el doble de información de lo que solían manejar con
anterioridad.
Pero antes de lanzarse a estas experiencias, es necesario interiorizarse en los
conceptos teóricos y técnicos que hacen a esta gran disciplina, los cuales serán
explicados a continuación.
2.2. Paralaje
Antes de comenzar a desarrollar este concepto, es importante que no se lo
confunda con una de las señales monoculares nombradas en el primer capítulo llamada
movimiento de paralaje, asociada con el movimiento relativo de los objetos en relación al
punto de visión o registro de la realidad. El concepto de paralaje que se explicará a
continuación no tiene relación alguna con el explicado en el párrafo anterior, sin embargo
está directamente relacionado con el concepto de disparidad binocular o retiniana.
Como se explicó en capítulos anteriores, el ojo humano está separado
aproximadamente por 65mm, la retina de cada ojo percibe una imagen levemente distinta
de los mismos objetos que se observan, ambas imágenes son fusionadas por el cerebro,

26
que a partir de ellas interpreta una única imagen 3D, proceso llamado estereopsis. Con
las cámaras 3D pasa exactamente lo mismo, ya que la técnica de la estereoscopía
cinematográfica imita este fenómeno natural, por lo tanto cada cámara registra un punto
de vista levemente distinto al de la otra, la disparidad binocular es imitada por la distancia
entre las cámaras, llamada en este caso distancia interaxial o interocular, que se refiere a
la distancia entre ambos ejes ópticos. Esta distancia es la que indica el nivel de paralaje
en la imagen, entiéndase por paralaje la distancia horizontal que existe entre los objetos
homólogos o equivalentes del par estéreo. Para comprender mejor este concepto basta
con visualizar una imagen estereoscópica sin las gafas adecuadas, se observarán dos
imágenes superpuestas levemente separadas horizontalmente una de otra, algunos
objetos del cuadro estarán más separados y otros menos. Este desplazamiento entre los
objetos homólogos del par estéreo, equivalente uno al ojo izquierdo y otro al ojo derecho,
se conoce como paralaje.
Figura 2: Paralaje. Fuente: http://3dsite2.punt.nl/
Cuando las dos imágenes, izquierda y derecha, se visualizan de forma simultánea
utilizando las gafas adecuadas, el paralaje del par estéreo imita, de forma forzada o
artificial, a la disparidad retiniana humana, ya que permite ver al ojo izquierdo únicamente
la imagen de la cámara izquierda anulando la imagen de la cámara derecha y viceversa,
produciendo en el cerebro el mismo proceso de estereopsis que el hombre experimenta
27
en la vida real, es por ello que se genera la ilusión de profundidad o escena 3D en el
espectador.
El paralaje y la disparidad retiniana se refieren a conceptos similares, sin embargo
es importante señalar la distinción entre ambos. El paralaje es el nivel de desplazamiento
horizontal de un objeto en relación a su homólogo del par estéreo y se mide en la
pantalla, mientras que la disparidad retiniana es su efecto en el destino, es decir el ojo, se
mide en la retina.
Los seres humanos al igual que todos los vertebrados, tienen los ojos separados
horizontalmente, por lo tanto, cuando se trata de percepción de profundidad en la
estereoscopía, siempre se habla de paralaje horizontal. Sin embargo en el material
filmado, o producido digitalmente con una computadora, existen errores técnicos que
pueden causar paralaje vertical. Este tipo de paralaje, provoca en el espectador fatiga
visual y posibles dolores de cabeza y debe evitarse o corregirse en el plano técnico, más
adelante se abordará en profundidad. En los siguientes párrafos se hará referencia a los
distintos tipos de paralaje horizontal y en los próximos puntos se retomará el problema
del paralaje vertical.
En una imagen estereoscópica la posición en profundidad de un objeto en relación
al nivel de la pantalla es lo que determina la cantidad y tipo de paralaje de dicho objeto.
Existen cuatro tipos de paralaje horizontal, cada uno de los cuales produce un efecto
distinto en la percepción de profundidad del espectador.
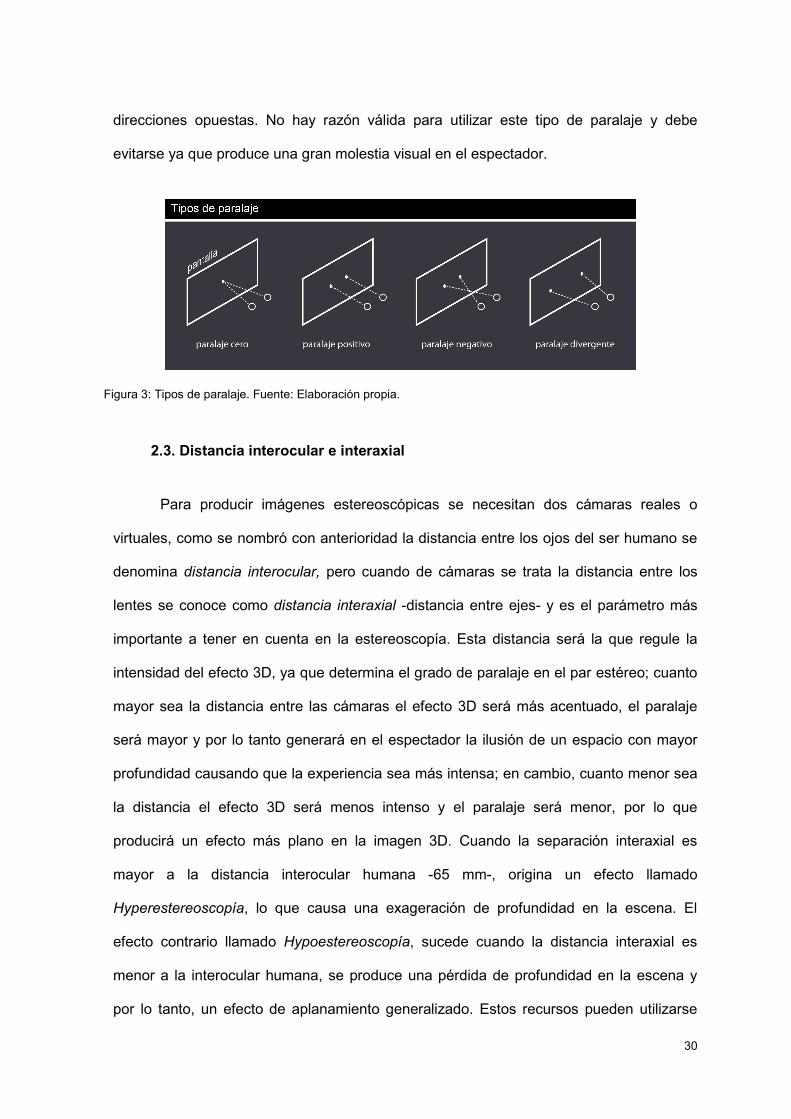
2.2.1. Paralaje cero
Este tipo de paralaje ocurre cuando los objetos homólogos o equivalentes del par
estéreo están exactamente en la misma posición en ambas imágenes izquierda y
derecha. Este tipo de paralaje se forma en el punto exacto que convergen los ejes de
28
ambas cámaras, los objetos situados allí no tendrán paralaje alguno, por lo tanto no
tendrán desplazamiento horizontal en la pantalla, se superpondrán en su totalidad.
Efecto 3D: Este tipo de paralaje determina a nivel estereoscópico la misma posición
de la pantalla, por lo tanto todo objeto que esté ubicado en este punto dará al espectador
la sensación de estar visualizando a dicho objeto exactamente en el mismo nivel de
profundidad que la pantalla cinematográfica.
2.2.2. Paralaje positivo
Este tipo de paralaje ocurre cuando los puntos homólogos de la imagen tienen una
separación positiva superior a cero y menor o hasta la separación de los ojos del ser
humano -65mm-. Es importante destacar que cuando el paralaje positivo es exactamente
igual que la separación interocular humana, sucede un caso particular llamado paralaje
infinito, los objetos situados en este punto parecen estar a una distancia infinita ante los
ojos del espectador. Es equivalente cuando en el mundo real se visualiza un objeto muy
lejano, el eje de los ojos se vuelve paralelo.
Efecto 3D: Este tipo de paralaje representa a nivel estereoscópico todo el espacio
que está detrás de la pantalla. Por lo tanto los objetos que tengan paralaje positivo darán
la sensación al espectador de visualizarlos por detrás del nivel de la pantalla
cinematográfica.
2.2.3. Paralaje negativo
Sucede cuando los puntos homólogos de la imagen tienen una separación
negativa, para un buen confort visual del espectador se recomienda que esta distancia no
supere la distancia de separación interocular humana.
29
Efecto 3D: Este tipo de paralaje causa en el espectador la sensación de ver a los
objetos por delante de la pantalla. Es un recurso que debe ser utilizado con cuidado, si se
utiliza durante mucho tiempo puede causar molestias visuales en el espectador ya que
genera un mayor esfuerzo visual.
2.2.3.1. Efectos indeseados del paralaje negativo
Una regla importante para el uso del paralaje negativo, es que el objeto
protagonista nunca sea cortado por los bordes del cuadro y siempre permanezca
parcialmente en el centro de la pantalla hasta volver a tener paralaje cero o positivo.
Cuando un objeto tiene paralaje negativo causa en el espectador la ilusión de estar
visualizándolo por delante de la pantalla, ¿pero qué sucede si al mismo tiempo el cerebro
interpreta que este objeto en realidad está por detrás de la pantalla?. Como ya se ha
explicado, una de las pistas monoculares de percepción de profundidad más importantes
es la oclusión o superposición de un objeto sobre otro. Si un objeto tapa a otro el
espectador percibe que el primero se encuentra por delante del objeto obstruido. Por lo
tanto, si un objeto con paralaje negativo es cortado por los bordes del cuadro se produce
un contrasentido, el espectador percibe mediante el proceso de estereopsis que ese
objeto está ubicado por delante de la pantalla, pero al ser cortado por los límites del
cuadro el cerebro interpreta que la pantalla tapa u obstruye a este objeto -ya que de lo
contrario este objeto debería salir de la pantalla sin cortarse-, en consecuencia se
produce una percepción de profundidad contradictoria que genera un conflicto visual y el
efecto estereoscópico falla.
2.2.4. Paralaje divergente
Ocurre cuando la separación de los puntos homólogos de la imagen es mayor a la
separación interocular humana. Es un tipo de paralaje que en la vida real no ocurre ya
que para ello se necesitaría un esfuerzo sobrehumano para mover ambos ojos en
30
direcciones opuestas. No hay razón válida para utilizar este tipo de paralaje y debe
evitarse ya que produce una gran molestia visual en el espectador.
Figura 3: Tipos de paralaje. Fuente: Elaboración propia.
2.3. Distancia interocular e interaxial
Para producir imágenes estereoscópicas se necesitan dos cámaras reales o
virtuales, como se nombró con anterioridad la distancia entre los ojos del ser humano se
denomina distancia interocular, pero cuando de cámaras se trata la distancia entre los
lentes se conoce como distancia interaxial -distancia entre ejes- y es el parámetro más
importante a tener en cuenta en la estereoscopía. Esta distancia será la que regule la
intensidad del efecto 3D, ya que determina el grado de paralaje en el par estéreo; cuanto
mayor sea la distancia entre las cámaras el efecto 3D será más acentuado, el paralaje
será mayor y por lo tanto generará en el espectador la ilusión de un espacio con mayor
profundidad causando que la experiencia sea más intensa; en cambio, cuanto menor sea
la distancia el efecto 3D será menos intenso y el paralaje será menor, por lo que
producirá un efecto más plano en la imagen 3D. Cuando la separación interaxial es
mayor a la distancia interocular humana -65 mm-, origina un efecto llamado
Hyperestereoscopía, lo que causa una exageración de profundidad en la escena. El
efecto contrario llamado Hypoestereoscopía, sucede cuando la distancia interaxial es
menor a la interocular humana, se produce una pérdida de profundidad en la escena y
por lo tanto, un efecto de aplanamiento generalizado. Estos recursos pueden utilizarse
31
con intenciones creativas, según el efecto que el director busque generar, un ejemplo es
el de causar en el espectador la sensación de vértigo, en el cual la Hyperestereoscopía
ayudaría desde el plano técnico. Estos parámetros son importantes y no pueden ser
arbitrarios, ya que existe una zona en la cual la estereoscopía funcionará correctamente -
llamada en inglés comfort zone o zona de confort visual- y otra en la que no. El paralaje
se mide en la pantalla mediante la separación en píxeles entre la imagen izquierda y la
derecha. Esta separación tiene ciertas restricciones para que el efecto 3D sea óptimo, no
puede haber una separación entre la imagen izquierda y la derecha que duplique o
triplique la distancia interocular humana, ya que el cerebro tendrá problemas para unir o
fusionar ambas imágenes y se generarán problemas de imágenes dobles, llamado en
inglés ghosting effect. Más adelante se retomará este tema en profundidad y se
enumerarán las reglas para que la estereoscopía funcione correctamente.
Configurar la distancia interaxial es una decisión artística y técnica importante que
está relacionada a la elección del lente de la cámara, al efecto 3D o ilusión de
profundidad que el director quiera generar en el espectador, a las dimensiones de la
pantalla de proyección de la película y a la distancia de visualización entre el espectador
y la pantalla. Son muchas las variables a tener en cuenta que influyen directa o
indirectamente en la percepción de tridimensionalidad y en que el efecto 3D se visualice
de forma correcta. Existen fórmulas matemáticas que ayudan a calcular de forma exacta,
cuál es la distancia interaxial óptima para las condiciones de proyección que se usarán.
Son datos de carácter técnico que se abordarán en los siguientes capítulos.
2.4. Convergencia
La convergencia es el segundo parámetro más importante en la estereoscopía, ya
que permite regular el plano de paralaje cero controlando así -a nivel estereoscópico- la
ubicación general de la escena 3D en la sala cinematográfica, cuán cercanos o lejanos
32
estarán los objetos a la vista del espectador. Si los ejes de las dos cámaras son
paralelos, la percepción de la escena 3D será la de estar por completo delante de la
pantalla cinematográfica. Los únicos objetos que tendrán paralaje cero -los cuales no
tendrán disparidad horizontal en la pantalla- serán los objetos ubicados en el infinito, ya
que sus puntos equivalentes en el par estéreo estarán tan próximos que se superpondrán
en su totalidad.
Como se explicó en párrafos anteriores, el paralaje cero representa a nivel
estereoscópico, la misma posición de profundidad que la pantalla de proyección o
visualización, por lo tanto en este caso, el plano infinito de la escena 3D coincidirá con la
posición de la pantalla y en consecuencia el resto de la escena 3D estará por delante de
la pantalla. Ya se verá más adelante, que el abuso de ubicar objetos por delante de la
pantalla -siempre hablando a nivel estereoscópico o ilusión de profundidad 3D- atenta
contra el confort visual y puede resultar molesto a la vista del espectador, ya que se le
exige un esfuerzo extra a la visión. Es recomendable hacer uso de este recurso en casos
puntuales, en aquellos que el director quiera enfatizar un detalle en especial y que en la
mayor parte del film la escena 3D se ubique casi en su totalidad detrás de la pantalla,
utilizando paralaje cero y positivo respectivamente en mayor porcentaje que el paralaje
negativo. Se abordarán a continuación alguna de las técnicas que se utilizan para
configurar una puesta de cámara estereoscópica.
33
Capítulo 3: Puesta de cámaras y confort visual estereoscópico
Hay distintas formas de realizar una puesta de cámaras en el cine 3D, cada una de
ellas exige una manera particular de controlar el plano donde se ubica el paralaje cero. La
diferencia entre estas opciones reside en la dirección del eje de las cámaras, se pueden
posicionar ambas cámaras de forma paralela, en este caso sus ejes ópticos nunca
convergen entre sí; y por otro lado se pueden posicionar las cámaras de forma angulada,
lo cual permite que sus ejes converjan en un punto.
En este capítulo se abordará desde una perspectiva técnica la teoría concerniente a
las distintas formas de configurar una puesta de cámaras. Por otro lado se desarrollarán
los distintos puntos a respetar para lograr que el espectador visualice de forma
confortable una película estereoscópica. Se utilizará como fuente principal la bibliografía
citada en el capítulo anterior, material oficial de la compañía Autodesk y del experto en
estereoscopía digital Bernard Mendiburu.
3.1. Convergencia de ejes ópticos o Toe-in
Para poder lograr que la escena 3D se encuentre detrás del nivel de la pantalla es
necesario poder controlar el plano de paralaje cero, una manera de lograrlo es haciendo
converger los ejes de ambas cámaras en un punto, para lo cual sus ejes ópticos deben
rotar. El punto en el que los ejes de las cámaras convergen será equivalente al paralaje
cero o pantalla de visualización, en el que no habrá disparidad horizontal. Por lo tanto,
para lograr que la escena 3D se encuentre detrás del nivel de la pantalla, los ejes de las
cámaras deben converger en el objeto más próximo al punto de vista de la cámara. De
esta manera, todos los objetos más lejanos a este primer objeto se ubicarán, a nivel
estereoscópico, detrás de la pantalla de visualización.
34
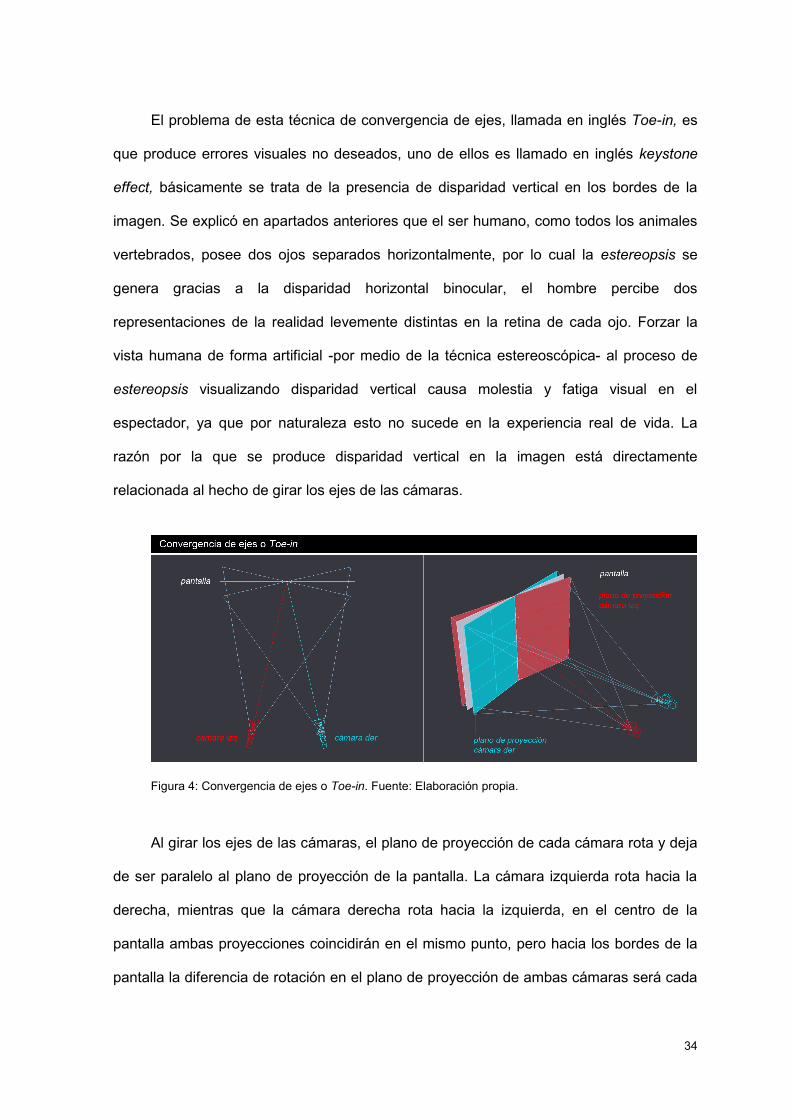
El problema de esta técnica de convergencia de ejes, llamada en inglés Toe-in, es
que produce errores visuales no deseados, uno de ellos es llamado en inglés keystone
effect, básicamente se trata de la presencia de disparidad vertical en los bordes de la
imagen. Se explicó en apartados anteriores que el ser humano, como todos los animales
vertebrados, posee dos ojos separados horizontalmente, por lo cual la estereopsis se
genera gracias a la disparidad horizontal binocular, el hombre percibe dos
representaciones de la realidad levemente distintas en la retina de cada ojo. Forzar la
vista humana de forma artificial -por medio de la técnica estereoscópica- al proceso de
estereopsis visualizando disparidad vertical causa molestia y fatiga visual en el
espectador, ya que por naturaleza esto no sucede en la experiencia real de vida. La
razón por la que se produce disparidad vertical en la imagen está directamente
relacionada al hecho de girar los ejes de las cámaras.
Figura 4: Convergencia de ejes o Toe-in. Fuente: Elaboración propia.
Al girar los ejes de las cámaras, el plano de proyección de cada cámara rota y deja
de ser paralelo al plano de proyección de la pantalla. La cámara izquierda rota hacia la
derecha, mientras que la cámara derecha rota hacia la izquierda, en el centro de la
pantalla ambas proyecciones coincidirán en el mismo punto, pero hacia los bordes de la
pantalla la diferencia de rotación en el plano de proyección de ambas cámaras será cada
35
vez mayor. Esto causa que en el centro de la pantalla haya una visualización correcta,
pero en los bordes de la pantalla se produzca disparidad vertical.
La ventaja de esta técnica reside en poder configurar y controlar el plano de
paralaje cero simplemente haciendo converger los ejes de las cámaras en el objeto
deseado, pero por otro lado trae problemas de paralaje vertical, por lo que es una técnica
cuestionada. Para poder solucionar los problemas de paralaje vertical, es necesario que
los planos de proyección de ambas cámaras y el de la pantalla sean completamente
paralelos y estén ubicados en el mismo lugar. Pero como ya se explicó, la técnica de ejes
paralelos sitúa -a nivel estereoscópico- el 100% de la escena 3D delante de la pantalla,
haciendo que el plano de paralaje cero -pantalla de visualización- coincida con el infinito,
lo cual causa fatiga visual al espectador. ¿Es posible controlar el plano de paralaje cero
utilizando la técnica de ejes paralelos? Lo es, mediante técnicas de post-producción que
se explicarán en profundidad en el siguiente punto. Pero ¿por qué se sigue utilizando la
técnica Toe-in o convergencia de ejes si mediante la técnica de ejes paralelos se logra
resolver el problema de paralaje vertical y al mismo tiempo controlar el plano de paralaje
cero? en algunas situaciones es útil el uso de la técnica Toe-in, como el caso de eventos
en vivo en los cuales el proceso de post-producción no se puede realizar en tiempo real,
esta técnica permite manejar de forma dinámica el plano de paralaje cero y modificarlo
según sea necesario en tiempo real.
También es útil en filmaciones en set, cuando los objetos de la escena se
encuentran muy cercanos a los lentes de la cámaras, en este caso, si por un
inconveniente físico las cámaras no pueden juntarse o aproximarse lo suficiente para
realizar la toma, la técnica Toe-in es una solución sencilla. Esta técnica resulta tolerable a
la vista humana, siempre y cuando no se converjan de forma exagerada los ejes ópticos
de las cámaras. Algunos errores que genera esta técnica pueden ser arreglados en post-
producción por lo que sigue siendo una técnica usada.

36
3.2. Ejes ópticos paralelos
La técnica más precisa para producir un efecto estereoscópico sin problemas de
distorsión o paralaje vertical es la puesta de cámaras con ejes paralelos. El proceso de
filmación con un sistema de cámaras paralelas y uno con convergencia de ejes, es
básicamente el mismo, la diferencia reside en que en el primer caso el plano de paralaje
cero se ajusta en post-producción y no durante la filmación. En filmaciones en set esto
probablemente sea una desventaja, ya que el realizador no tiene una noción exacta de su
toma hasta llegar a la etapa de post-producción. Lo que no sucede usando la misma
técnica en producciones realizadas por computadora, que se puede aplicar a tres casos
distintos: en películas realizadas íntegramente mediante el uso de la computadora,
llamadas en inglés CG movies -computer generated movies- en el caso de películas con
efectos visuales VFX movies, las cuales contienen filmaciones reales con la integración
de animación 3D digital, y en películas 2D ya filmadas que son convertidas a
estereoscópicas mediante un proceso de post-producción. En estos casos, al ser
películas trabajadas casi en su totalidad con un software, es posible previsualizar la toma
directamente en el software utilizado. Por este motivo algunos realizadores prefieren
utilizar la técnica de convergencia de ejes al momento de filmar en set, pues les permite
tener una noción a nivel estereoscópico de la toma en la etapa de realización o
producción, aunque asumen el riesgo de tener problemas de disparidad vertical si no
logran corregirlos en el proceso de post-producción.
3.3. Configuración del plano de paralaje cero
Como se ha comentado, la técnica de cámaras paralelas en su estado puro o sin
proceso de corrección, hace que la totalidad de la escena 3D se ubique por delante de la
pantalla, generando únicamente paralaje negativo, lo cual causa serias molestias visuales
en el espectador. Esto ocurre porque el plano de paralaje cero está ubicado en el infinito,
37
en el nivel de mayor profundidad de la escena 3D, lo que hace que consecuentemente el
resto de la escena tenga paralaje negativo. Para poder corregir este problema, es
necesario manipular el plano de paralaje cero, para así poder ubicarlo en zonas más
cercanas al punto de vista de la cámara y lograr de esta manera que los objetos más
lejanos tengan paralaje positivo y no negativo.
Existen dos técnicas para manipular el plano de paralaje cero que a continuación se
explicarán.
3.3.1. Desplazamiento horizontal de la imagen o H.I.T.
Ya se ha dicho que el plano de paralaje cero es equivalente a la superposición
completa de los puntos homólogos del par estéreo y también se ha dicho que la puesta
de cámaras paralelas ubica al paralaje cero en el infinito. Esto significa que los únicos
objetos de la escena que se superponen por completo son los ubicados en el infinito y
que todos los objetos más próximos a la cámara tendrán cada vez mayor paralaje, en
este caso negativo.
La técnica H.I.T. -Horizontal Image Translation- se desarrolla en la etapa de post-
producción y se basa en desplazar horizontalmente la imagen izquierda y derecha para
lograr superponer los objetos más próximos a la cámara, logrando modificar la posición
del plano de paralaje cero hacia éstos objetos. Al lograr que los objetos o la zona de la
escena próxima a la cámara tenga paralaje cero, se logra que los objetos más lejanos
dejen de tener paralaje negativo para tener paralaje positivo, y de esta manera pasen de
estar delante de la pantalla a estar por detrás. Al superponer los objetos cercanos a la
cámara, los objetos lejanos comienzan a tener mayor paralaje o separación entre sí, lo
cual puede resultar arriesgado ya que si esta separación es mayor que la interocular
humana -65mm- se genera paralaje divergente, que es incorrecto y molesto a la vista del
espectador.
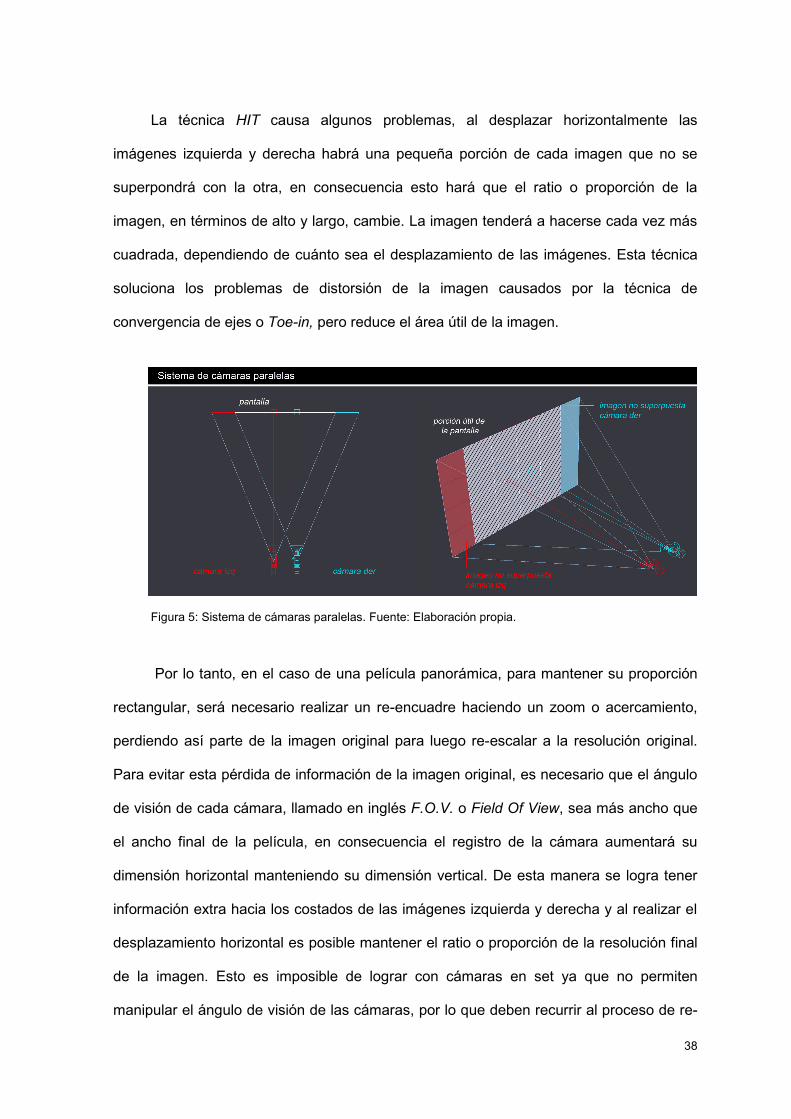
38
La técnica HIT causa algunos problemas, al desplazar horizontalmente las
imágenes izquierda y derecha habrá una pequeña porción de cada imagen que no se
superpondrá con la otra, en consecuencia esto hará que el ratio o proporción de la
imagen, en términos de alto y largo, cambie. La imagen tenderá a hacerse cada vez más
cuadrada, dependiendo de cuánto sea el desplazamiento de las imágenes. Esta técnica
soluciona los problemas de distorsión de la imagen causados por la técnica de
convergencia de ejes o Toe-in, pero reduce el área útil de la imagen.
Figura 5: Sistema de cámaras paralelas. Fuente: Elaboración propia.
Por lo tanto, en el caso de una película panorámica, para mantener su proporción
rectangular, será necesario realizar un re-encuadre haciendo un zoom o acercamiento,
perdiendo así parte de la imagen original para luego re-escalar a la resolución original.
Para evitar esta pérdida de información de la imagen original, es necesario que el ángulo
de visión de cada cámara, llamado en inglés F.O.V. o Field Of View, sea más ancho que
el ancho final de la película, en consecuencia el registro de la cámara aumentará su
dimensión horizontal manteniendo su dimensión vertical. De esta manera se logra tener
información extra hacia los costados de las imágenes izquierda y derecha y al realizar el
desplazamiento horizontal es posible mantener el ratio o proporción de la resolución final
de la imagen. Esto es imposible de lograr con cámaras en set ya que no permiten
manipular el ángulo de visión de las cámaras, por lo que deben recurrir al proceso de re-
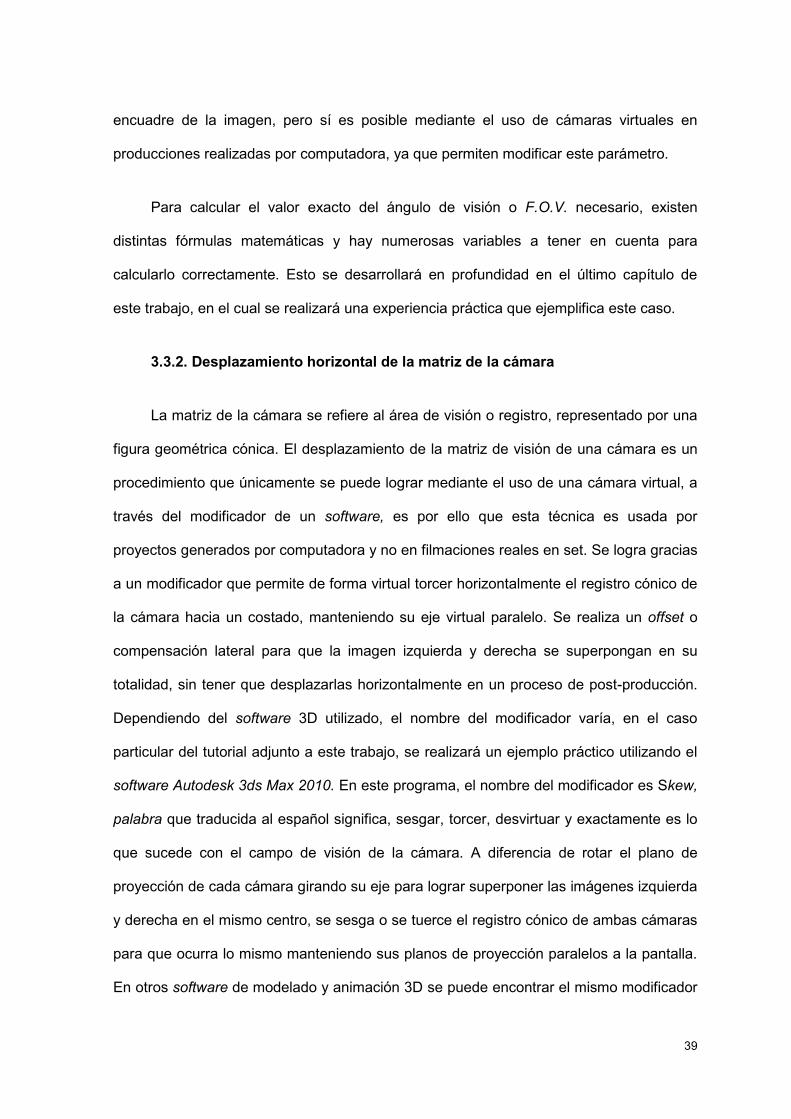
39
encuadre de la imagen, pero sí es posible mediante el uso de cámaras virtuales en
producciones realizadas por computadora, ya que permiten modificar este parámetro.
Para calcular el valor exacto del ángulo de visión o F.O.V. necesario, existen
distintas fórmulas matemáticas y hay numerosas variables a tener en cuenta para
calcularlo correctamente. Esto se desarrollará en profundidad en el último capítulo de
este trabajo, en el cual se realizará una experiencia práctica que ejemplifica este caso.
3.3.2. Desplazamiento horizontal de la matriz de la cámara
La matriz de la cámara se refiere al área de visión o registro, representado por una
figura geométrica cónica. El desplazamiento de la matriz de visión de una cámara es un
procedimiento que únicamente se puede lograr mediante el uso de una cámara virtual, a
través del modificador de un software, es por ello que esta técnica es usada por
proyectos generados por computadora y no en filmaciones reales en set. Se logra gracias
a un modificador que permite de forma virtual torcer horizontalmente el registro cónico de
la cámara hacia un costado, manteniendo su eje virtual paralelo. Se realiza un offset o
compensación lateral para que la imagen izquierda y derecha se superpongan en su
totalidad, sin tener que desplazarlas horizontalmente en un proceso de post-producción.
Dependiendo del software 3D utilizado, el nombre del modificador varía, en el caso
particular del tutorial adjunto a este trabajo, se realizará un ejemplo práctico utilizando el
software Autodesk 3ds Max 2010. En este programa, el nombre del modificador es Skew,
palabra que traducida al español significa, sesgar, torcer, desvirtuar y exactamente es lo
que sucede con el campo de visión de la cámara. A diferencia de rotar el plano de
proyección de cada cámara girando su eje para lograr superponer las imágenes izquierda
y derecha en el mismo centro, se sesga o se tuerce el registro cónico de ambas cámaras
para que ocurra lo mismo manteniendo sus planos de proyección paralelos a la pantalla.
En otros software de modelado y animación 3D se puede encontrar el mismo modificador
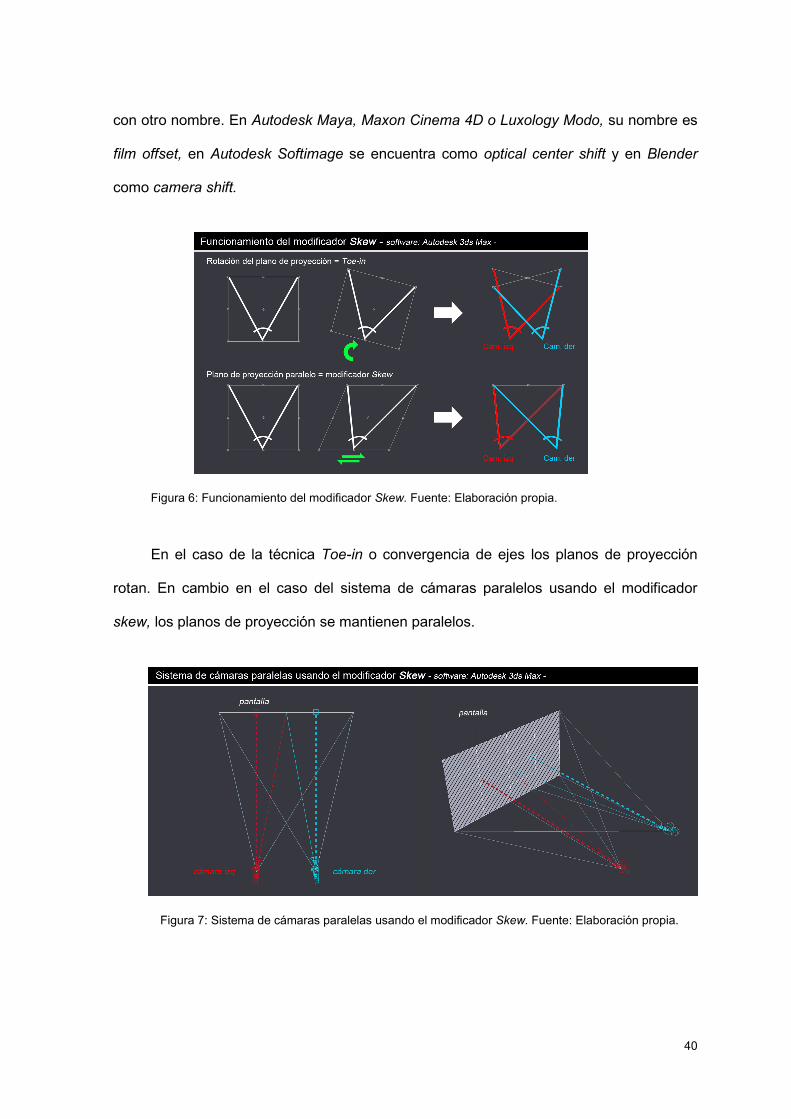
40
con otro nombre. En Autodesk Maya, Maxon Cinema 4D o Luxology Modo, su nombre es
film offset, en Autodesk Softimage se encuentra como optical center shift y en Blender
como camera shift.
Figura 6: Funcionamiento del modificador Skew. Fuente: Elaboración propia.
En el caso de la técnica Toe-in o convergencia de ejes los planos de proyección
rotan. En cambio en el caso del sistema de cámaras paralelos usando el modificador
skew, los planos de proyección se mantienen paralelos.
Figura 7: Sistema de cámaras paralelas usando el modificador Skew. Fuente: Elaboración propia.
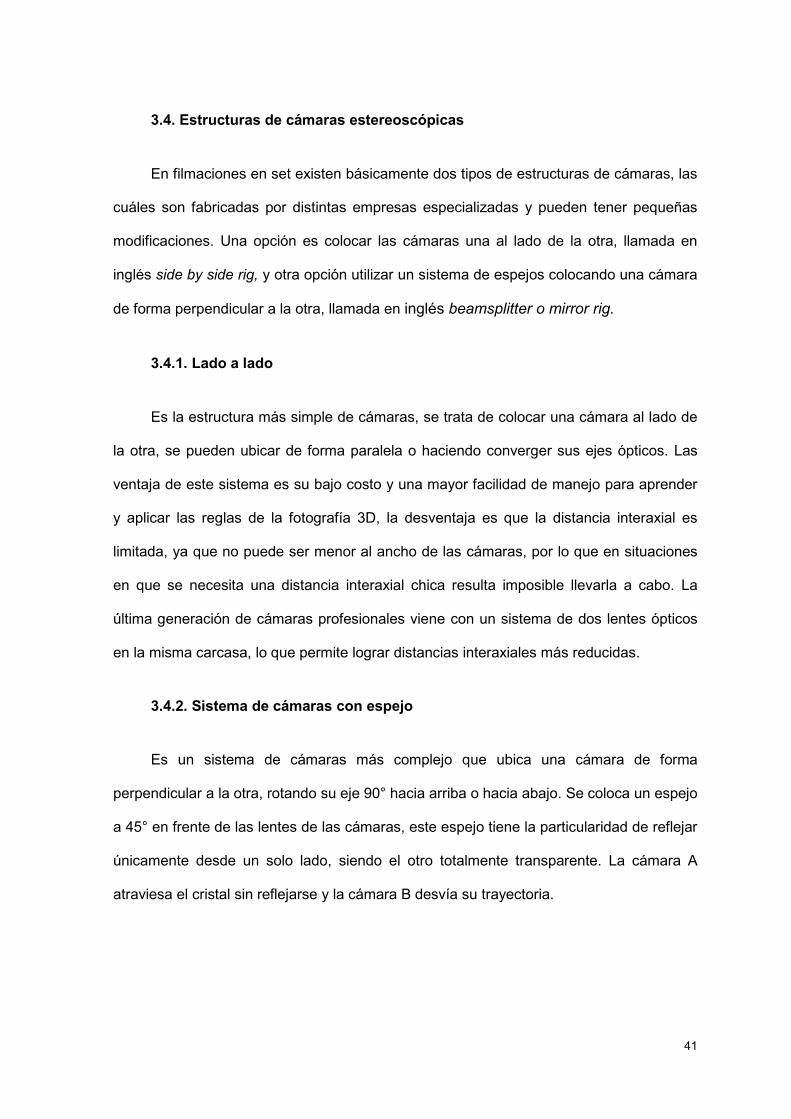
41
3.4. Estructuras de cámaras estereoscópicas
En filmaciones en set existen básicamente dos tipos de estructuras de cámaras, las
cuáles son fabricadas por distintas empresas especializadas y pueden tener pequeñas
modificaciones. Una opción es colocar las cámaras una al lado de la otra, llamada en
inglés side by side rig, y otra opción utilizar un sistema de espejos colocando una cámara
de forma perpendicular a la otra, llamada en inglés beamsplitter o mirror rig.
3.4.1. Lado a lado
Es la estructura más simple de cámaras, se trata de colocar una cámara al lado de
la otra, se pueden ubicar de forma paralela o haciendo converger sus ejes ópticos. Las
ventaja de este sistema es su bajo costo y una mayor facilidad de manejo para aprender
y aplicar las reglas de la fotografía 3D, la desventaja es que la distancia interaxial es
limitada, ya que no puede ser menor al ancho de las cámaras, por lo que en situaciones
en que se necesita una distancia interaxial chica resulta imposible llevarla a cabo. La
última generación de cámaras profesionales viene con un sistema de dos lentes ópticos
en la misma carcasa, lo que permite lograr distancias interaxiales más reducidas.
3.4.2. Sistema de cámaras con espejo
Es un sistema de cámaras más complejo que ubica una cámara de forma
perpendicular a la otra, rotando su eje 90° hacia arriba o hacia abajo. Se coloca un espejo
a 45° en frente de las lentes de las cámaras, este espejo tiene la particularidad de reflejar
únicamente desde un solo lado, siendo el otro totalmente transparente. La cámara A
atraviesa el cristal sin reflejarse y la cámara B desvía su trayectoria.
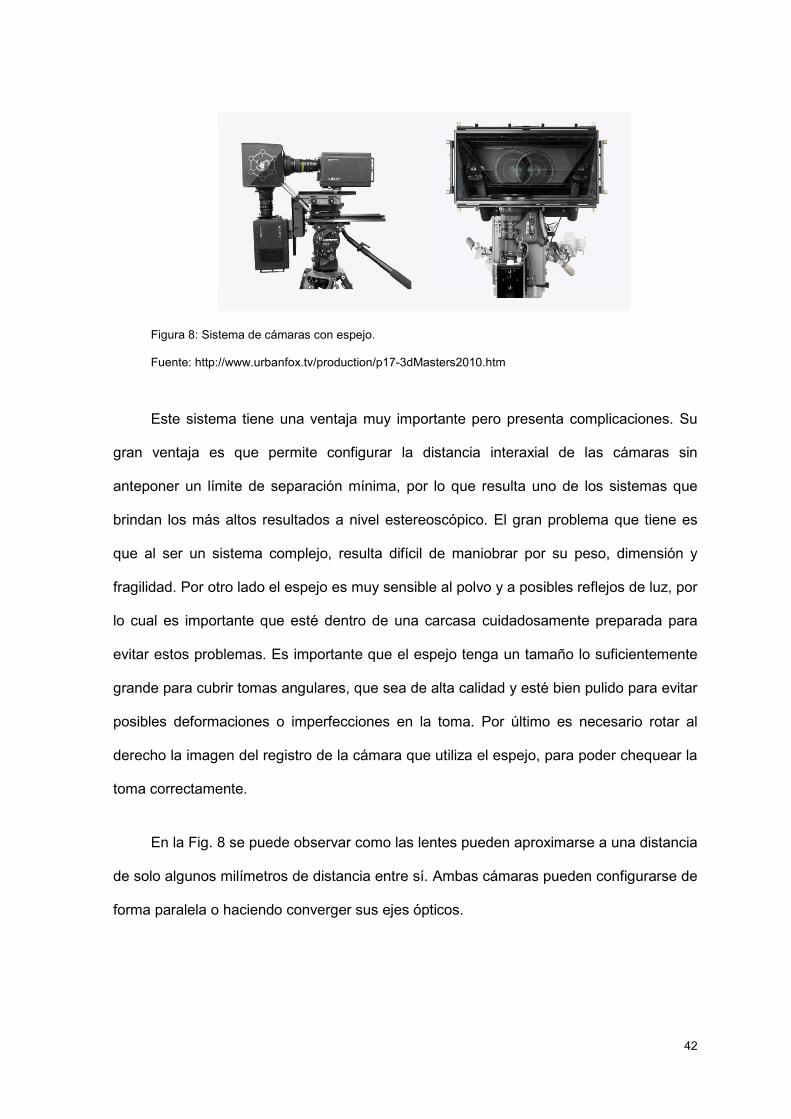
42
Figura 8: Sistema de cámaras con espejo.
Fuente: http://www.urbanfox.tv/production/p17-3dMasters2010.htm
Este sistema tiene una ventaja muy importante pero presenta complicaciones. Su
gran ventaja es que permite configurar la distancia interaxial de las cámaras sin
anteponer un límite de separación mínima, por lo que resulta uno de los sistemas que
brindan los más altos resultados a nivel estereoscópico. El gran problema que tiene es
que al ser un sistema complejo, resulta difícil de maniobrar por su peso, dimensión y
fragilidad. Por otro lado el espejo es muy sensible al polvo y a posibles reflejos de luz, por
lo cual es importante que esté dentro de una carcasa cuidadosamente preparada para
evitar estos problemas. Es importante que el espejo tenga un tamaño lo suficientemente
grande para cubrir tomas angulares, que sea de alta calidad y esté bien pulido para evitar
posibles deformaciones o imperfecciones en la toma. Por último es necesario rotar al
derecho la imagen del registro de la cámara que utiliza el espejo, para poder chequear la
toma correctamente.
En la Fig. 8 se puede observar como las lentes pueden aproximarse a una distancia
de solo algunos milímetros de distancia entre sí. Ambas cámaras pueden configurarse de
forma paralela o haciendo converger sus ejes ópticos.
43
3.5. Reglas para un efecto 3D confortable
Para poder lograr un resultado estereoscópico que sea confortable a la vista del
espectador es necesario imitar al máximo las condiciones visuales reales de una
persona. Aunque todavía no hay una norma estándar internacional que garantice un
óptimo resultado de calidad y confort visual estereoscópico, existen algunas
recomendaciones técnicas que fueron desarrolladas por la experiencia de los grandes
estudios internacionales.
3.5.1. Distancia y tamaño de la pantalla
La percepción estereoscópica humana tiene un límite de distancia, cuando un
objeto está situado a más de 150 metros, la diferencia de visión del ojo izquierdo y
derecho es nula y los ejes ópticos se vuelven paralelos. Este es el caso de una de las
formas de visión más confortables y relajantes para la vista humana, lo mismo sucede al
visualizar las estrellas, la luna, u objetos situados a una distancia muy lejana.
En el cine 3D estereoscópico, esta situación es equivalente a cuando las imágenes
izquierda y derecha están separadas a 65mm o distancia interocular humana. Cuando
sucede esto el espectador percibe al objeto a una distancia infinita dentro de la sala
cinematográfica. ¿Qué sucede si la misma proyección se visualiza en una pantalla más
grande y esta separación o paralaje duplica o triplica su distancia? Por cierto período de
tiempo el espectador podrá visualizar la pantalla sin problemas, pero luego comenzará a
sentir fatiga visual. Esto sucederá tanto en el campo del paralaje positivo como en el del
paralaje negativo, en los cuales si la separación entre ambas imágenes es muy grande, el
cerebro tendrá dificultades para fusionar y recrear una sola imagen 3D.
Para lograr resultados óptimos se debe tener especial cuidado con éstos
parámetros y existen tres variables importantes que modifican la percepción del
44
espectador de la distancia entre las imágenes del par estéreo, éstas variables se deben
manejar y calcular de forma previa para lograr una estereoscopía confortable: La
dimensión de la pantalla, considerando que se visualiza la imagen en pantalla completa o
full screen; la distancia del espectador a la pantalla y la distancia interocular humana.
En el caso de una situación en la cual estas tres variables están correctamente
calculadas para una visualización confortable, cualquiera sea la medida de cada una
pasará lo siguiente:
a) Si el tamaño de la pantalla se agranda, la separación entre las imágenes del par
estéreo tenderá a ser mayor desde el punto de vista original del espectador, si el tamaño
de la pantalla se reduce esta separación se hará cada vez menor.
b) Lo mismo sucederá con la ubicación del espectador, a medida que se acerque a
la pantalla la percepción de la separación entre las imágenes estéreos será cada vez
mayor y al alejarse de la pantalla será menor.
c) En el caso de la tercer variable, la distancia interocular humana, es un dato que
no está sujeto a considerables modificaciones, ya que se usa un promedio de la
separación interocular de una persona adulta, que son 65mm. En el caso de producir una
película que será vista solamente por niños se tiene que tener en cuenta que esta
distancia es menor a la de un adulto.
Lo que sucede al modificarse la distancia entre ambas imágenes del par estéreo, es
nada menos que la alteración de la percepción estereoscópica para la vista del
espectador. Por lo que es posible que el efecto 3D se vea afectado por pérdida o
exageración de la profundidad, lo cual puede resultar grave si esta distancia varía de
forma considerable. Por ello, se debe tener especial cuidado con estos parámetros en
pos de lograr una visión confortable. Por lo que para una visualización óptima lo correcto
45
sería que una película estereoscópica sea calculada y pensada para ser vista con un
tamaño de pantalla predefinido y a una distancia del espectador a la pantalla predefinida
con el fin de que la separación entre las imágenes del par estéreo nunca supere la
interocular humana. Y es así como en realidad sucede, el problema reside en su difícil
aplicación práctica, por una cuestión lógica, las películas en las salas de cine se
visualizan por decenas de espectadores ubicados a distintas distancias de la pantalla.
Por lo tanto lo recomendable es obtener un promedio y tomar como referencia un punto
equidistante al resto de la sala. En el caso de las salas de cine esta ubicación
corresponde a la butaca del centro de la grada, la dificultad de este cálculo aumenta aún
más teniendo en cuenta que no todas las salas son iguales, la butaca del centro puede
estar a una distancia mayor o menor que la misma butaca en otra sala. Si se produce
material estereoscópico sin tener en cuenta estas medidas, puede resultar en problemas
que llevan la visualización a un fracaso seguro.
3.5.2. La estereoscopía como una ventana
Otra cuestión importante a considerar es manejar con mucho criterio los tipos de
paralaje. Una de las reglas de oro en la estereoscopía, es pensar a la misma como una
ventana, de manera que todo sucede desde la ventana hacia afuera. Para ello es
importante utilizar en mayor medida el paralaje cero y positivo. El uso del paralaje
negativo, o de objetos delante de la pantalla, debe ser mínimo y de corta duración ya que
obligan a un esfuerzo visual del espectador que puede resultar molesto después de un
tiempo prolongado. Tampoco es recomendable que suceda con mucha frecuencia, ya
que todo objeto de acción que llame la atención del espectador y que se ubique, a nivel
estereoscópico, por delante del nivel de la pantalla o por delante, obliga al espectador a
dejar de enfocar o converger su vista en la pantalla y a hacerlo en un plano físico que no
existe. Estos recursos si se utilizan en menor medida no ocasionan molestias visuales,
pero si suceden de forma constante, la vista del espectador es obligada a realizar un
46
esfuerzo de convergencia en distintas profundidades de la sala, que luego de un tiempo
resulta problemático y molesto, y puede causar dolores de cabeza. La visión más
confortable para el espectador será siempre la de enfocar o converger su vista en la
pantalla, para ello es importante que el realizador intente siempre ubicar los objetos
protagónicos de acción en este punto y trasladar la acción a otros niveles de profundidad
en situaciones clave y no muy extensas.
Este tema se retomará desde un aspecto más técnico en el capítulo sexto de este
trabajo, en el cual se hará referencia a los cálculos matemáticos y mediciones a seguir
para lograr una correcta toma estereoscópica que resulte confortable de visualizar. Para
ello se nombrarán algunas fórmulas disponibles en el blog de Louis Marcoux, de la
compañía Autodesk.
3.5.3 La zona de confort
Una regla importante en la estereoscopía es la zona de confort. Existe una zona
segura en la cual el efecto 3D será confortable y es allí donde deben estar presentes
todos los elementos u objetos de la imagen. Todo elemento que esté por fuera de esta
zona no será confortable para la vista del espectador, ya que la separación entre la
imagen izquierda y derecha será muy grande. Es por esta razón que se genera un
problema de visión doble o ghosting en inglés, el cerebro tiene dificultades para fusionar
ambas vistas y generar una sola imagen, por lo que interpreta que hay objetos dobles o
repetidos.
La zona de 3D confortable se calcula en base a la distancia entre la cámara y su
target o plano de proyección, se toma como referencia la mitad de esta distancia y se
mide una mitad hacia atrás y otra mitad hacia adelante del target de la cámara. El target
representa el punto de paralaje cero o nivel de la pantalla.
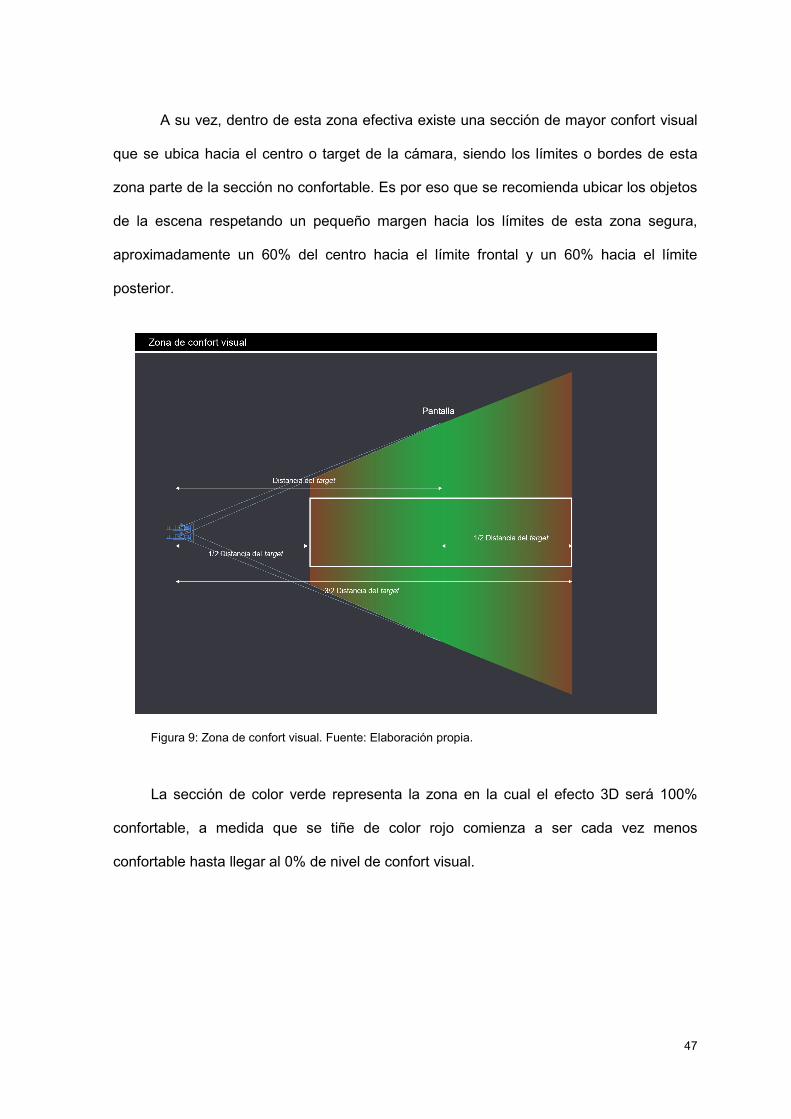
47
A su vez, dentro de esta zona efectiva existe una sección de mayor confort visual
que se ubica hacia el centro o target de la cámara, siendo los límites o bordes de esta
zona parte de la sección no confortable. Es por eso que se recomienda ubicar los objetos
de la escena respetando un pequeño margen hacia los límites de esta zona segura,
aproximadamente un 60% del centro hacia el límite frontal y un 60% hacia el límite
posterior.
Figura 9: Zona de confort visual. Fuente: Elaboración propia.
La sección de color verde representa la zona en la cual el efecto 3D será 100%
confortable, a medida que se tiñe de color rojo comienza a ser cada vez menos
confortable hasta llegar al 0% de nivel de confort visual.
48
Capítulo 4: Formatos, proyección y visualización
Una vez concretada la etapa de producción y post-producción el trabajo está listo
para ser exportado a su formato final listo para ser reproducido y visualizado, para ello
este capítulo está dedicado al desarrollo de los distintos formatos de video
estereoscópico y a los métodos de visualización principales que existen actualmente. La
bibliografía consultada para el contenido técnico de este capítulo es de la compañía
StereoGraphics, publicación oficial llamada Developers' Handbook (1997).
4.1. Formatos de visión estereoscópica
En la informática el formato hace referencia a la manera en la cual se guarda la
información en un archivo para que pueda ser interpretado por una computadora y está
directamente relacionado a la extensión del archivo. Dicha extensión está representada
por las últimas siglas presentes al finalizar el nombre del archivo, seguidas de un punto,
las cuales representan el tipo de archivo y formato, si es un archivo de imagen, video,
música, etc. En el mundo audiovisual existen distintos formatos de video, como por
ejemplo el formato de Apple llamado Quicktime Movie representado por la extensión
MOV y el de Microsoft llamado Audio Video Interleave AVI. El formato de video, funciona
como contenedor para alojar secuencias de imágenes y audio, que pueden tener distintos
tipos de codificaciones o grados de compresión para disminuir su peso y puedan así ser
reproducidos fluidamente por un software. En el caso de la estereoscopía se emplea el
término formato desde otra perspectiva, ya que no se hace referencia a la extensión del
archivo sino más bien al modo en el cual se dispone la imagen izquierda y derecha para
que luego pueda ser correctamente interpretado por un software de reproducción 3D. En
el archivo de video las imágenes izquierda y derecha se guardan de forma separada,
para luego ser combinadas nuevamente al momento de su reproducción, para componer
una sola imagen estereoscópica.
49
4.1.1. Entrelazado
Las normas de video televisivo que se usa actualmente PAL o NTSC reproducen un
tipo de formato de video entrelazado, que consiste en separar cada imagen en dos
campos, el par y el impar. Cada imagen está conformada por un grupo de líneas
horizontales, el campo par reproduce únicamente las líneas pares y el campo impar las
impares, se reproduce primero un grupo de líneas por completo y luego el otro.
El formato original y básico de visión estereoscópica televisiva aprovecha la
estructura del entrelazado para codificar la imagen izquierda y derecha en líneas
alternadas. Este es el método utilizado actualmente, el cual tiene la virtud de utilizar
equipos estándares de bajo costo. Con el entrelazado se consigue, a través de un simple
interruptor, dividir cada imagen en dos, mitad a un ojo y la otra mitad al otro, las cuales se
muestran una detrás de la otra. Debido al bajo promedio de imágenes visualizadas por
segundo, el método resulta en un continuo parpadeo, responsable de causar molestias
visuales o mareos luego de mirar la televisión por un largo tiempo, este inconveniente se
soluciona aumentando la frecuencia de imágenes por segundo. Otro problema es que
cada ojo ve la mitad de las líneas o píxeles, por lo tanto la imagen pierde la mitad de su
resolución.
4.1.2. Arriba y abajo
El método Arriba y Abajo utiliza dos subcampos dispuestos uno encima del otro,
dentro de un mismo campo estándar. Las imágenes en estos subcampos se comprimen
de arriba hacia abajo reduciendo su resolución vertical a la mitad. Es importante
mencionar que este método puede operar con la infraestructura existente de gráficos de
computadora o televisores de alta gama con una alta frecuencia de campos por segundo
ya que de lo contrario se presentarán problemas de parpadeo de la imagen. El
reproductor se encarga de devolver a cada imagen su tamaño original y fusionarlas para
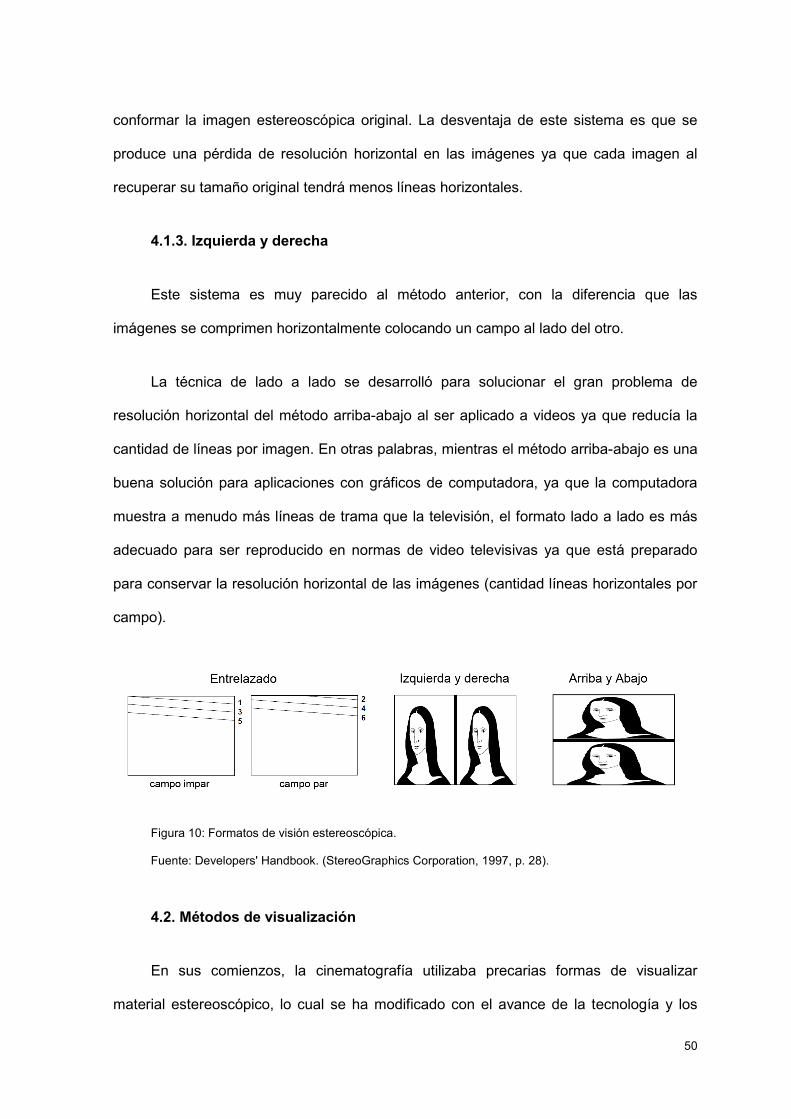
50
conformar la imagen estereoscópica original. La desventaja de este sistema es que se
produce una pérdida de resolución horizontal en las imágenes ya que cada imagen al
recuperar su tamaño original tendrá menos líneas horizontales.
4.1.3. Izquierda y derecha
Este sistema es muy parecido al método anterior, con la diferencia que las
imágenes se comprimen horizontalmente colocando un campo al lado del otro.
La técnica de lado a lado se desarrolló para solucionar el gran problema de
resolución horizontal del método arriba-abajo al ser aplicado a videos ya que reducía la
cantidad de líneas por imagen. En otras palabras, mientras el método arriba-abajo es una
buena solución para aplicaciones con gráficos de computadora, ya que la computadora
muestra a menudo más líneas de trama que la televisión, el formato lado a lado es más
adecuado para ser reproducido en normas de video televisivas ya que está preparado
para conservar la resolución horizontal de las imágenes (cantidad líneas horizontales por
campo).
Figura 10: Formatos de visión estereoscópica.
Fuente: Developers' Handbook. (StereoGraphics Corporation, 1997, p. 28).
4.2. Métodos de visualización
En sus comienzos, la cinematografía utilizaba precarias formas de visualizar
material estereoscópico, lo cual se ha modificado con el avance de la tecnología y los
51
descubrimientos científicos. Se exponen a continuación los distintos métodos de
visualización estereoscópica, introducidos en el primer capítulo de este trabajo.
4.2.1. Sistema anaglifo
Existen distintas técnicas para visualizar una imagen estereoscópica y poder
percibir la ilusión de profundidad 3D, de todas estas técnicas, la más sencilla y
económica es la opción de los anaglifos. Para esta forma de visualización las imágenes
3D se componen de dos capas de color para producir el efecto de profundidad. Cuando
se observa con las gafas correspondientes se revela una imagen en 3D siendo finalmente
la corteza visual cerebral la que fusiona en profundidad esta percepción.
Para que esta separación sea posible, las dos imágenes que se proyectan son
coloreadas, por ejemplo el ojo izquierdo con rojo y el derecho con cian, estos colores no
son al azar, corresponden a pares opuestos en el círculo cromático lumínico, se puede
utilizar otras opciones de pares complementarios cromáticos como el magenta y verde o
azul y amarillo. El objetivo del proyector izquierdo se cubre con un gel rojo y el ocular
izquierdo del espectador también, y así la imagen izquierda es invisible para el ojo
izquierdo. De la misma forma el proyector derecho lleva el gel cian y asimismo el ocular
derecho del espectador, de esta manera esta imagen no es visible para el ojo derecho. El
filtro rojo anula las radiaciones rojas y el filtro cian las cianes.
Los receptores del área óptica cerebral fusionan estas percepciones y la imagen es
recibida en negro sobre un fondo que oscila entre el rojo y el cian.
Ventajas y desventajas del método anaglifo:
- Ventajas: Tanto la proyección como las gafas, que son de gelatina, son
económicas. Las dos imágenes pueden formarse en una película de dos capas que
52
también son de bajo costo. Funciona en cualquier medio de reproducción, hasta incluso
sobre papel.
- Desventajas: En ocasiones se produce una cierta difusión de un ojo al otro, lo que
se denomina falta de extinción, esto puede suceder aún usando los mejores colorantes.
Por otro lado no reproduce el espectro de color en su totalidad, lo cual no permite
visualizar de forma correcta los colores originales de la película y reduce su calidad
visual.
4.2.2. Sistema de luz polarizada
El avance de la tecnológica sustituyó los anaglifos por la estereoscopía de luz
polarizada que tiene la ventaja de no alterar los colores.
La polaridad es una característica de la luz que es invisible al ojo humano, pero
algunos insectos como las abejas, algunas arañas y crustáceos poseen dispositivos
anatómicos microscópicos que le permiten captar el plano de vibración de la luz
polarizada.
La luz tiene un carácter direccional y su propagación depende de la orientación
que tenga respecto del material por el que se propaga. La luz no polarizada está
compuesta por ondas que vibran en todos los ángulos, al llegar a un medio polarizador,
sólo las ondas que vibran en un ángulo determinado consiguen atravesar el medio, al
poner otro polarizador a continuación, si el ángulo que deja pasar el medio coincide con
el ángulo de vibración de la onda, la luz pasará íntegra, si no sólo una parte pasará hasta
llegar a un ángulo de 90º entre los dos polarizadores. De esta manera utilizando lentes
polarizados, la luz de la imagen derecha solo es vista por el lente derecho y la luz de la
imagen izquierda por el lente izquierdo.
Se coloca un cristal polarizador delante de la lente del proyector que hace que la
53
luz se polarice en una dirección u otra dependiendo de si la imagen va a ser para el ojo
izquierdo o para el derecho. Se coloca frente al proyector un disco con ambos cristales
que gira delante del cañón con la misma frecuencia que éste para que los fotogramas
correspondan con el cristal indicado, de esta manera se logra proyectar la imagen
izquierda y derecha utilizando el mismo proyector.
Para poder comprender estos procesos es necesario profundizar algunos
conceptos físicos. La luz posee un movimiento ondulatorio formado por ondas
transversales. Al propagarse produce una vibración propia generada por un campo
eléctrico y un campo magnético perpendiculares entre sí y a la dirección de propagación
de las ondas; por ello, la luz está formada por ondas electromagnéticas. Si la oscilación o
vibración del campo eléctrico es en un plano, el movimiento ondulatorio está polarizado
linealmente. Lo habitual es que la luz no esté polarizada, a este tipo de luz se denomina
luz natural.
La luz que emite cualquier objeto se produce en los átomos que lo conforman; más
concretamente, en los saltos de los electrones que envuelven los núcleos atómicos.
Como hay innumerables átomos, y cada uno produce luz en direcciones distintas, el
resultado es que no haya un plano definido de oscilación de las ondas, es decir, la luz no
está polarizada.
Un polarizador es una lámina transparente que tiene la propiedad de atenuar las
oscilaciones del campo eléctrico en una dirección, dejando pasar la luz que oscila en la
dirección perpendicular. Los filtros polarizados que se utilizan en la actualidad son
grisáceos y se pueden utilizar para eliminar la luz del día que se refleja en distintas
superficies por ejemplo un lago, cristales, también pueden modificar el azul del cielo,
aclarándolo u oscureciéndolo.
54
Ventajas y desventajas del método polarizado:
- Ventajas: La fatiga visual es ostensiblemente menor y el color de las imágenes es
superior y de mejor calidad y se utiliza un solo proyector.
- Desventajas: Existe una pérdida de luz de ⅓ del total de cada filtro (esto puede
compensarse con fuentes de luz más potentes). Se puede producir el efecto “fantasma”.
Dado que los filtros polarizados no alcanzan un valor de extinción del 100%, durante la
proyección se puede ver una imagen fantasma que es mayor cuanto mayor sea el
contraste. Para disminuir este efecto deben evitarse los contrastes fuertes como por
ejemplo el blanco junto al negro.
4.2.3. Sistema de campo secuencial
Este sistema es también conocido como sistema de polarización activo ya que
requiere de la sincronización de las gafas con la frecuencia de muestreo de la pantalla,
en cambio el sistema explicado en el punto anterior es denominado sistema de
polarización pasivo ya que no requiere de ninguna sincronización entre la pantalla y las
gafas del espectador.
En este caso se proyectan las imágenes izquierda y derecha una seguida de la otra
sin ningún tipo de procesamiento previo. Las gafas, equipadas con una batería interna,
tienen un sistema de obturación que permite ver a cada ojo la imagen correspondiente
tapando la visión del otro, para ello es necesario que estén correctamente sincronizadas
con la frecuencia de muestreo de la pantalla a través de una conexión de puerto
infrarrojo. A diferencia de los sistemas anteriores, las gafas presentan un sistema más
complejo, que agrega peso y mayor costo al producto.
55
Este es el método más utilizado por las compañías de televisores 3D, el contenido
audiovisual se transmite en una alta frecuencia de fotogramas, de hasta 50 o 60 cuadros
por segundo, por lo que no es posible reproducirlo en cualquier monitor.
Ventajas y desventajas del método polarizado:
- Ventajas: Su principal ventaja es que es un sistema que elimina casi por completo
los problemas de ghosting o imagen doble que presentan los sistemas anteriores.
- Desventajas: El precio de las gafas aumenta de forma considerable al igual que
los Televisores adecuados, siendo así un sistema menos accesible económicamente a un
público de clase media baja. Las gafas deben llevar batería y su peso es mayor.
4.2.4. Monitores auto-estereoscópicos
La gran ventaja de este sistema es que permite al espectador poder visualizar
gráficos estereoscópicos sin la necesidad de utilizar dispositivos externos como gafas o
cascos. Para que esto ocurra, la pantalla debe ser capaz de enviar la imagen izquierda al
ojo izquierdo evitando que ésta sea vista por el ojo derecho y viceversa. Esto puede ser
logrado de distintas maneras por la tecnología actual, pero la base de su funcionamiento
es la segmentación de la pantalla en distintas líneas verticales, las líneas pares dirigen su
luz únicamente hacia un ojo y las impares dirigen su luz hacia el otro. Para ello delante de
la pantalla se ubica una fina rejilla vertical, especialmente diseñada con pequeñas
fracturas verticales transparentes, cada grupo de líneas, pares o impares, funcionan
como ventana para descubrir la imagen izquierda o derecha. Esto se puede lograr
mediante el método de barreras de paralaje o el método de hoja lenticular, los cuáles el
autor de este Proyecto de Graduación no considera relevante profundizar.
56
Ventajas y desventajas del sistema auto-estereoscópico
- Ventajas: Permite visualizar la pantalla sin la utilización de gafas o dispositivos
externos lo cual resulta más confortable para el espectador.
- Desventajas: Limita la posición y ángulo de visión del espectador, ya que el efecto
es percibido correctamente solo desde un punto de vista, si el espectador se corre de
este punto podrá visualizar con cada ojo las imágenes incorrectas y el efecto 3D falla.
Como se utiliza solamente la mitad de la pantalla para mostrar la imagen izquierda y
derecha respectivamente, el brillo y la resolución de cada imagen se reduce a la mitad, ya
que se utiliza la mitad de los recursos para proyectar cada imagen. Por lo tanto para
reproducir una película de una resolución Full HD de 1920x1080 píxeles es necesario una
pantalla que sea capaz de reproducir el doble de resolución. El costo de esta tecnología
es alto y contemplando que se necesita el doble de resolución para visualizar
correctamente una calidad alta de visualización se multiplica su precio.
57
Capítulo 5: Reflexiones y análisis acerca de la estereoscopía
Este capítulo está dedicado a reflexionar a la estereoscopía como medio para lograr
una experiencia más cercana a la realidad en el espectador. La tendencia de la
cinematografía a empujar al límite cada vez más los efectos visuales y especiales y junto
al 3D lograr experiencias fuertes e inmersivas, y la búsqueda del espectador de vivir
estas experiencias.
Por otro lado se analizará la participación de la técnica estereoscópica en una
película, sobre cuál es su aporte a la trama y de qué manera el director genera sentido
con ella. Se detallarán también las consecuencias que conlleva, en el proceso de
producción de una película, la decisión de filmar en 3D.
5.1 El espectáculo y la búsqueda de una experiencia realista
El objetivo principal de este trabajo es dar a conocer la teoría y la práctica de la
estereoscopía para ser incorporado en la formación académica y profesional de los
estudiantes de la Universidad de Palermo. El trabajo presentado logra profundizar de
forma sólida en la teórica y en la práctica de la estereoscopía, explicando un tema que
está teniendo un importante desarrollo comercial en la cinematografía actual. Esto resulta
una de las motivaciones principales que llevó al autor de este trabajo a desarrollar este
tópico, siendo un tema poco conocido y con escaso material accesible en español,
logrando de esta manera un pequeño aporte al círculo académico y profesional de esta
carrera. Más allá de este objetivo práctico, ante un despliegue cada vez más complejo de
técnicas y recursos audiovisuales que tienden a conseguir mayor realismo, resulta
importante reflexionar acerca del aporte comunicacional de la estereoscopía, de los
motivos que llevan a la cinematografía a reutilizar esta técnica y de los motivos que
atraen al espectador a visualizar una película en 3D.
58
Desde que el hombre realizó las primeras representaciones, esbozos, dibujos en
rocas, pinturas en madera, papel, modelados de arcilla, hay un hilo conductor en el
anhelo de crear realidad y poder compartirla. Se inicia así la relación entre el productor de
medios audiovisuales y el espectador, destinatario de este producto. La representación
de la realidad o el espectáculo data desde el origen mismo del hombre, como bien se
desarrolló en el capítulo primero de este escrito.
En este largo proceso, sin duda, el teatro es uno de los más antiguos y constantes
de los medios de representación, pero la cinematografía logra realizar un fuerte aporte, la
captura de secuencias de imágenes y la ilusión de movimiento de modo que el
espectador comienza a poder compartir situaciones, documentales, ficcionales para
sumergirse en una realidad sin la necesidad de contar con la presencia en vivo de los
actores y su escenografía. Esto generó un gran avance y una posibilidad hasta ahora no
superada.
A su vez, los medios de producción se han perfeccionado, generalizado y vuelto
extremadamente accesibles, la mayor parte de la población tiene posibilidades de filmar y
difundir imágenes, desde herramientas tan populares y sencillas como un teléfono móvil
hasta cámaras fotográficas digitales que permiten grabar video en alta resolución. A tal
punto que cabe cuestionarse cómo la industria de los medios, los profesionales y artistas
de este oficio, deberán superarse para seguir manteniendo la supremacía del medio
¿Será este uno de los motivos por los cuales la estereoscopía ha vuelto a utilizarse en la
cinematografía?
En cuanto al espectador, sería muy extenso incursionar en el infinito campo de las
motivaciones, deseos, pulsiones, y manifestaciones psicológicas y sociológicas de lo
humano en relación al espectáculo. Pero es incuestionable que todas las culturas y todas
las épocas contienen, como una importe expresión cultural, la producción de
59
espectáculos. Ya sea desde lo ritual, religioso, con fines de establecer diferencias de
identidad, generando pertenencia o exclusión, con el objetivo de aglutinar, manipular,
conducir, educar, hasta la no tan trivial función de entretener, el recurso audiovisual, el
espectáculo, las representaciones, simples y domésticas hasta monumentales, han dado
productos a lo largo de toda la historia ¿Qué deseo satisface el hombre a través del
espectáculo o la representación de la realidad? ¿Por qué hay una búsqueda de hacer
creíble lo increíble?
El deseo del hombre de poder ser artífice de su destino, de creer que la
consecuencia de una acción es una reacción previsible y controlable, podría ser la
manera de entender y justificar la producción de recreación, de espectáculos, de ficción.
En esto, el cine, junto con el teatro que se mantiene como un segundo recurso en cuanto
a masividad, son particularmente eficientes.
En la actualidad la oferta de recursos es extensísima y de una accesibilidad muy
alta. Un alto porcentaje de población consume al menos una y aún más de una película
por día. Si consideramos las series televisivas, el consumo de ficción abarca niveles casi
alienantes, como si la visión de la ficción amenazara a sustituir la vida misma. Pero este
tema excede los alcances del presente trabajo
En el mismo sentido, hay una inmensa tendencia a la filmación de la propia y
realidad humana. La gente común registra, sus pequeños guiones personales, sus
propias historias. Todo ciudadano común puede ser un cineasta de su vida, y los realities,
proliferan como una opción más y más popular. Las redes sociales contribuyen a esa
ilusión de exposición, de ser el protagonista de una película. Los medios técnicos, han
tenido una propagación abrumadora y esta pasión de filmarse y subirlo a la red, se
convirtió en una de las actividades más frecuentes en la vida diaria de una persona de
esta nueva era.
60
El hombre es cada vez mas consumidor de espectáculos, de allí, que también haya
mayor competencia y exigencia de parte de los usuarios. Posiblemente sea este uno de
los motivos de la utilización de la estereoscopía, la necesidad de brindar un espectáculo
más cercano a la realidad, pues logra aportar un realismo indiscutido a la experiencia
cinematográfica. Sin duda alcanza por el momento la mayor aproximación para conseguir
que lo ilusorio de la película sea vivido con la mayor realidad interna, con una mayor
identificación del espectador hacia los protagonistas, al sentirse éste más fuertemente
presente como testigo presencial de los hechos narrados. Más allá de esto, no puede
descuidarse el similar esmero en el relato de la trama, aquello que se quiere contar y
transmitir. Ya que toda decisión artística y técnica debe responder a la trama, es esto lo
fundamental y lo importante, el contenido; la forma debe acompañar y responder a ello
para que pueda ser comunicado de la manera más efectiva al espectador. Por este
motivo a continuación se analizarán algunos ejemplos de la cinematografía 3D, para
identificar cómo las decisiones artísticas y técnicas de todos los departamentos de
producción responden a cuidar la trama y a lograr la manera más creíble de transmitir y
comunicar el relato.
5.2. La estereoscopía en El Hobbit: Un Viaje Inesperado (2012)
En este caso se tomará como objeto de análisis la película El Hobbit: Un Viaje
Inesperado (2012) dirigida por Peter Jackson, adaptación de la novela fantástica El
Hobbit del escritor británico John Ronald Reuel Tolkien.
Como fuente de información se utilizará una grabación en video disponible en el
blog oficial de la película, en el cual el director Peter Jackson decidió poner a disposición
del público distintas grabaciones a modo de backstage para compartirlo con los futuros
espectadores, previo al estreno de la película. Material audiovisual disponible en:
http://www.thehobbitblog.com/production-video-4/
61
5.2.1. Características particulares del proyecto
El mundo Tolkiano encuentra en El Hobbit su origen. Es la introducción a ese
mundo de enanos, elfos, dragones, ogros, orcos, magos y hombres, que después
estallan en El Señor de los Anillos, la gran saga novelada de la Tierra Media.
El Hobbit es la historia del hobbit Bilbo Bolson, que junto a unos enanos debe ir a
buscar el tesoro robado por el dragón Smaug. Este hecho desenvuelve una serie de
aventuras en la que se ven comprometidos todos los personajes de la historia, llena de
complicidades, peligros, proezas, sabiduría, compañerismos, lealtades, desconfianzas,
pero sobre todo de magia.
Lo central de la historia es la mítica batalla entre el bien y el mal, con una profunda
reflexión sobre la autosuperación, la astucia sobre la fuerza, la ética contra el terror, la
solidaridad frente al individualismo.
Tolkien supo representar en pleno siglo XX, cada vez más tecnificado y materialista,
el auge de una literatura fantástica, llena de idealismo, inocencia, aventura y esperanza.
Al mismo tiempo, por las cualidades de su narrativa y los contenidos de la trama,
ser rescatada para ser llevada al cine utilizando modernas técnicas estereoscópicas, que
involucran al espectador comprometiendo todos sus sentidos.
Peter Jackson, el director de la zaga de El Señor de los Anillos (2001 - 2003), fue el
responsable de llevar a la pantalla grande la primera parte de la trilogía de El Hobbit
(2012). Esta es, probablemente, la proyección más esperada en el año de su estreno. El
motivo de ello no se debe a que las películas con las que se disputaba el favoritismo de la
audiencia no tengan méritos tecnológicos alcanzados con importantes inversiones en sus
presupuestos de producción, sino que en el caso de El Hobbit: Un Viaje Inesperado su
director cuenta una historia sencilla y afable con todos los matices necesarios para que
62
los espectadores se comprometan emocionalmente con los personajes de forma
inmediata. Es esta razón, por sobre todas las características del cine de aventura, por la
cual el espectador recibe la narración en un formato tecnológicamente imponente que se
compone de tres características particulares:
- La primera tiene que ver de forma directa con la temática de este trabajo, se trata
de una película ideada y pensada desde un principio para ser proyectada utilizando la
técnica de la estereoscopia. Esta decisión fue esencial para la narración de la historia y
se manifiesta en cada una de las etapas del proceso de producción, ya que
probablemente sea el primer caso en el que la planificación en 3D está presente incluso
en las etapas de diseño de arte conceptual, previo al rodaje. La estereoscopía se
convierte en el eje principal de toda la producción imponiendo desafíos a todas los
departamentos técnicos y artísticos y siendo tema de vital importancia en la toma de
decisiones, más adelante se darán ejemplos puntuales. "Me encanta cuando una película
te atrapa y te conviertes en parte de la experiencia, y el 3D ayuda a sumergirte en la
película" (Peter Jackson, 2011)
- La segunda característica a destacar es la cantidad de cuadros por segundos a la
que fue proyectada la película. Los seres humanos poseen un sistema visual que les
permite diferenciar hasta 60 cuadros independientes interpolados durante la fracción de
tiempo de un segundo. Las imágenes fijas que conforman una película convencional son
proyectadas a una velocidad de 24 cuadros por segundos, ya que esta es la velocidad
mínima necesaria para que los espectadores experimenten la ilusión de movimiento
continuo a través de la proyección de una secuencia de imágenes. En el caso de El
Hobbit: Un Viaje Inesperado el rodaje se realizó capturando 48 cuadros por segundo,
dando como resultado movimientos suaves y detallados en todas sus escenas, con el fin
de aproximarse de forma más natural a la visión humana y aportar un nivel más alto de
realismo a la experiencia del espectador.
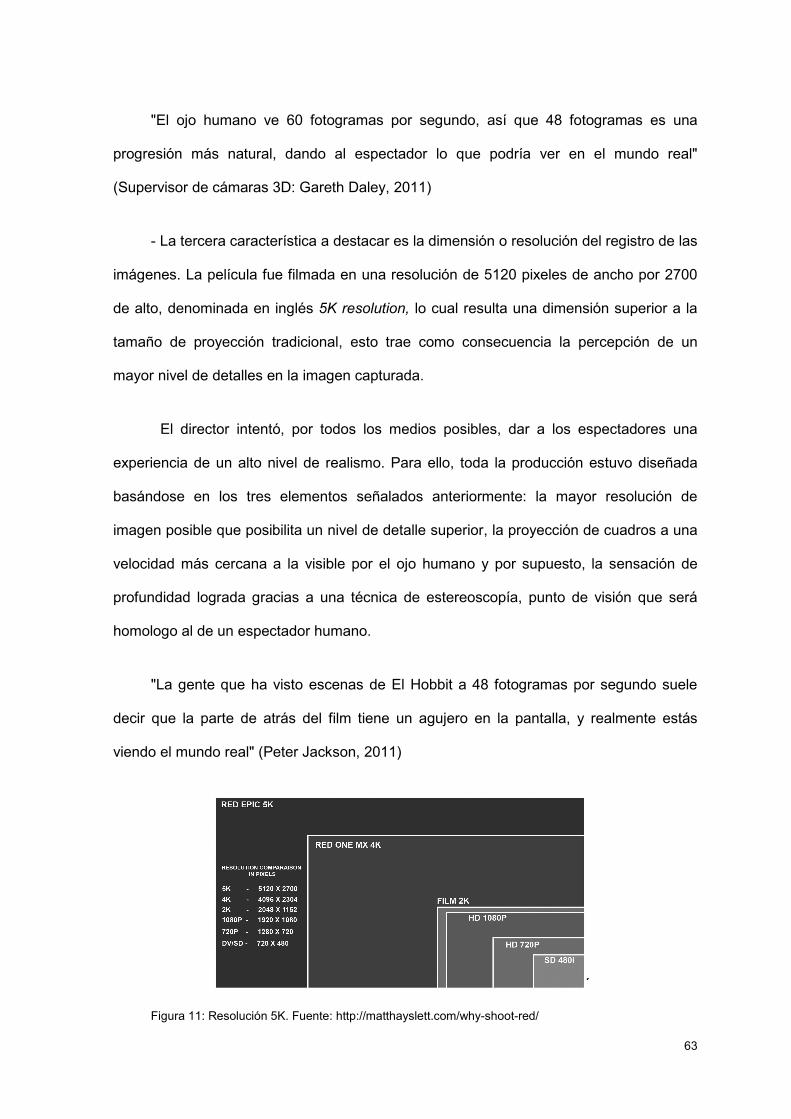
63
"El ojo humano ve 60 fotogramas por segundo, así que 48 fotogramas es una
progresión más natural, dando al espectador lo que podría ver en el mundo real"
(Supervisor de cámaras 3D: Gareth Daley, 2011)
- La tercera característica a destacar es la dimensión o resolución del registro de las
imágenes. La película fue filmada en una resolución de 5120 pixeles de ancho por 2700
de alto, denominada en inglés 5K resolution, lo cual resulta una dimensión superior a la
tamaño de proyección tradicional, esto trae como consecuencia la percepción de un
mayor nivel de detalles en la imagen capturada.
El director intentó, por todos los medios posibles, dar a los espectadores una
experiencia de un alto nivel de realismo. Para ello, toda la producción estuvo diseñada
basándose en los tres elementos señalados anteriormente: la mayor resolución de
imagen posible que posibilita un nivel de detalle superior, la proyección de cuadros a una
velocidad más cercana a la visible por el ojo humano y por supuesto, la sensación de
profundidad lograda gracias a una técnica de estereoscopía, punto de visión que será
homologo al de un espectador humano.
"La gente que ha visto escenas de El Hobbit a 48 fotogramas por segundo suele
decir que la parte de atrás del film tiene un agujero en la pantalla, y realmente estás
viendo el mundo real" (Peter Jackson, 2011)
´
Figura 11: Resolución 5K. Fuente: http://matthayslett.com/why-shoot-red/
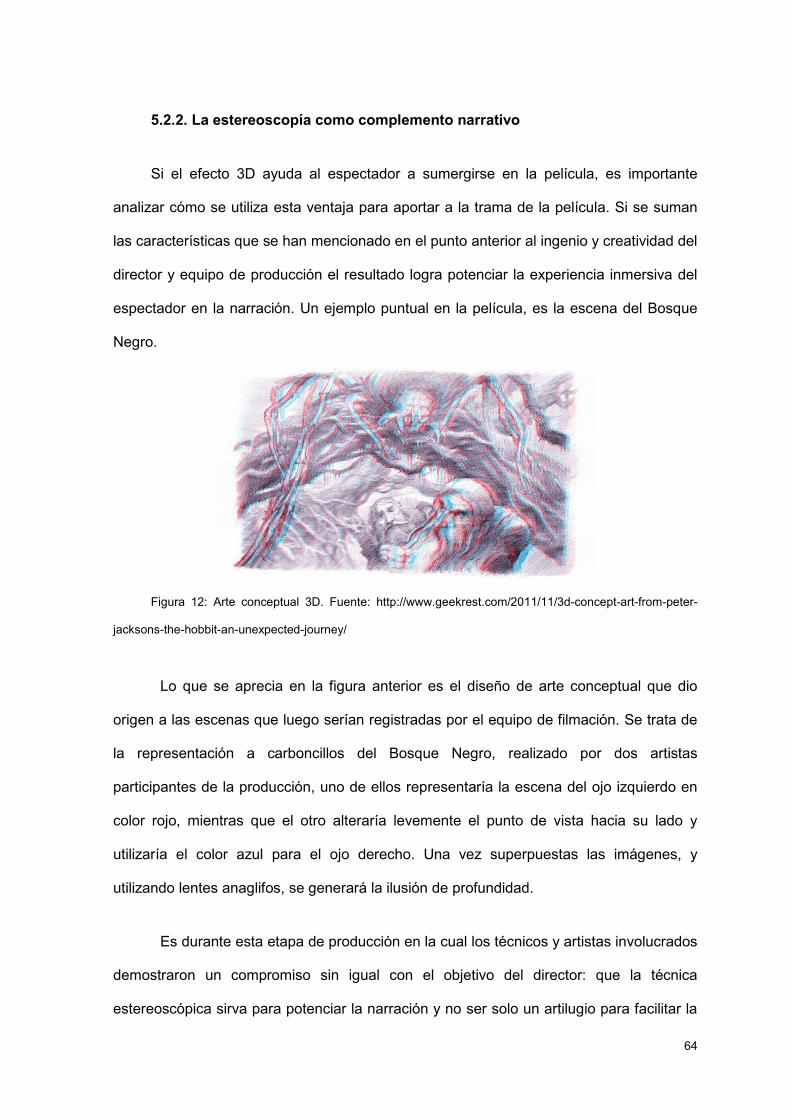
64
5.2.2. La estereoscopía como complemento narrativo
Si el efecto 3D ayuda al espectador a sumergirse en la película, es importante
analizar cómo se utiliza esta ventaja para aportar a la trama de la película. Si se suman
las características que se han mencionado en el punto anterior al ingenio y creatividad del
director y equipo de producción el resultado logra potenciar la experiencia inmersiva del
espectador en la narración. Un ejemplo puntual en la película, es la escena del Bosque
Negro.
Figura 12: Arte conceptual 3D. Fuente: http://www.geekrest.com/2011/11/3d-concept-art-from-peter-
jacksons-the-hobbit-an-unexpected-journey/
Lo que se aprecia en la figura anterior es el diseño de arte conceptual que dio
origen a las escenas que luego serían registradas por el equipo de filmación. Se trata de
la representación a carboncillos del Bosque Negro, realizado por dos artistas
participantes de la producción, uno de ellos representaría la escena del ojo izquierdo en
color rojo, mientras que el otro alteraría levemente el punto de vista hacia su lado y
utilizaría el color azul para el ojo derecho. Una vez superpuestas las imágenes, y
utilizando lentes anaglifos, se generará la ilusión de profundidad.
Es durante esta etapa de producción en la cual los técnicos y artistas involucrados
demostraron un compromiso sin igual con el objetivo del director: que la técnica
estereoscópica sirva para potenciar la narración y no ser solo un artilugio para facilitar la
65
comercialización de la película. Aquí, artistas plenamente consagrados en técnicas que
datan de centenares de años, como es el dibujo a carboncillos, lograron innovar en la
planificación de escenas al incluir la ilusión óptica tridimensional en su trabajo.
Al añadir estéreo, tienes la capacidad extra para controlar la profundidad, puedes idear formas en la que se convierta en parte de la narración de la película. Por ejemplo en el Bosque Negro, realmente jugamos con el hecho de que es un bosque que es casi alucinógeno. Te atrapa en él, te hace parte de él y nunca puedes salir (Peter Jackson, 2011)
La técnica de la estereoscopia es vital en escenas como la del Bosque Negro ya
que permite que el espectador se sienta realmente atrapado en un laberinto de
enredaderas de las cuales no alcanzará a salir. Esta sensación es resaltada por la
narrativa que describe un bosque casi alucinógeno, lleno de criaturas a las que no se
llega a distinguir entre la espesura y por la increíble agilidad con la que las cámaras
siguen la acción dentro de pasillos tan estrechos. Es aquí donde se aprecia el ingenio del
director en utilizar de forma inteligente la profundidad de la técnica 3D para aportar a la
trama.
El Bosque Negro es un gran bosque, y supongo que dirías que está lleno de enredaderas y árboles siniestros. Hay muchas cosas colgando y muchas cosas que vienen desde todos lados. Y nos ayuda que el 3D sea capaz de empujar a eso, e intentar que el público sienta lo que realmente es intentar moverse en el bosque con las cámaras mirando a la oscuridad, y ese sentimiento de mirada por encima del hombro (Diseñador de Producción: Dan Henna, 2011)
5.2.3. Desafíos y dificultades en el equipo de producción
Con respecto a las cámaras, el equipo de producción tuvo que hacer grandes
esfuerzos para mantener el procedimiento tradicional de filmación. Si por el solo hecho de
utilizar cámaras 3D se restringe la movilidad de las mismas dentro del set de filmación,
entonces también resultan restringidas las posibilidades narrativas del director. Sin
66
embargo, en la producción de El Hobbit: Un Viaje Inesperado se utilizaron cámaras
especiales que permiten ser montadas en formatos específicos a medida, dependiendo
de cada situación y tipo de movimiento de cámara. Para ello se contrató a una empresa
llamada 3ality, la cual estuvo encargada de diseñar cuatro tipos diferentes de monturas:
la cámara en mano que se lleva sobre el hombro, aquellas emplazadas en equipos de
estabilización o steady cam, en carros o vías y en grúas. Estos cuatro emplazamientos
son los convencionales del cine tradicional 2D, por lo que bajo ningún motivo se restringió
el trabajo del director. La única diferencia considerable es utilizar dos cámaras en lugar
de una sola, duplicando así también la cantidad de información que luego debe ser
almacenada, procesada, editada, y post-producida. "El trabajo con cámara móvil siempre
ha sido muy importante en mis películas, y lo último que quería hacer cuando decidimos
rodar en 3D era restringir o cambiar mi estilo de rodaje" (Peter Jackson, 2011)
La manera en que están dispuestas cada cámara en referencia a la otra también es
interesante de describir: debido al tamaño de cada lente cinematográfica y al tamaño en
general de cada cámara, estas no se pueden ubicar una al lado de la otra imitando dos
ojos humanos porque la separación mínima obtenida seria mayor a la distancia
interocular mencionada en capítulos anteriores y que es aproximada a 6cm. Para resolver
este inconveniente se utilizó un sistema de cámaras con espejo (cap 3.4.2.), que consiste
en orientar una cámara directamente al objetivo y la otra por sobre la primera y con una
rotación de 90 grados, es decir orientada hacia el suelo. Esta segunda cámara registra la
escena luego de ser reflejada por un sistema de espejos, lo que permite que cada
cámara registre la misma escena desde su perspectiva sin ningún inconveniente,
reduciendo la distancia interaxial a pocos centímetros.
Todas las monturas están equipados con un sistema a control remoto que permite
modificar, el punto de convergencia y la distancia interaxial de las cámaras mientras se
encuentran en movimiento, de forma programada o manual, pudiendo de esta manera
67
controlar el efecto de profundidad 3D en cualquier momento de la toma y en tiempo real.
Para resolver estos desafíos, el equipo de producción aprovechó el diseño de las
cámaras RED EPIC de módulos independientes que se acoplan de distintas maneras de
acuerdo a cada necesidad. "Esta es la TS5 en modo manual. Es nuestra principal cámara
de trabajo. Es ligera, pequeña, lo que permite a Peter meterse en pasillos y cuevas muy
bajos y estrechos, como lo haría con una cámara 2D" (Supervisor de cámara 3D: Gareth
Daley, 2011)
Otras aéreas de producción tuvieron que realizar cambios más considerables en su
manera de trabajar. Este es el caso de los departamentos relacionados al arte y la
ambientación. Las primeras pruebas con las cámaras dieron como resultado imágenes
poco saturadas, de colores apagados. En virtud de concretar la visión artística del
director, el departamento de maquillaje tuvo que utilizar tonalidades intensas de rojos
para retocar la piel de los personajes, mucho más rojas de lo que es habitual en cualquier
otra producción. Del mismo modo, tuvieron que sobre-saturar los colores del Bosque
Negro, lo que hizo que su ambientación en pleno rodaje luzca poco realista, con colores
por demás llamativos, pero una vez realizado el registro los colores se balancean
correctamente.
48 fotogramas en 3D es algo bastante implacable, y tenemos que cambiar toda nuestra forma de colorear estas cosas porque en nuestras primeras pruebas nos dimos cuenta que no había mucho rojo en estas piezas, entonces resaltaban demasiado en amarillo y reaccionaban en forma diferente que la piel normal con la sangre corriendo por ella, así que hemos tenido que añadir mucho color rojo a los maquillajes. (Supervisora de prótesis: Tami Lane, 2011)
Esta dificultad se presentó en todos aquellos sectores involucrados con el
maquillaje, vestuario y escenografías, los que debieron modificar sus paletas y
sobresaturar sus colores y así compensar la pérdida de color rojo en registro.
68
Por otro lado, el hecho de haber filmado en una resolución de dimensiones tan
grandes también trajo aparejado muchos desafíos que sortear sobre todo por parte de los
responsables de vestuarios. El registro superlativo de los detalles de la imagen rodada,
resultó en la desestimación de gran cantidad de telas seleccionadas debido a que muy
probablemente los espectadores no se sintieran cómodos observando el movimiento de
telas con patrones tan complejos. El encargado de vestuario debió escoger materiales en
donde los detalles puedan ser resaltados por el uso de cámaras de gran resolución sin
comprometer la comodidad del espectador.
Con motivo de la alta resolución y detalle de movimiento en el registro, los
personajes debieron ser representados con la utilización de pelucas con un grado de
calidad muy elevada y materiales naturales, ya que cualquier detalle de artificialidad sería
muy notorio.
Con las cosas en 3D es increíble cómo, cuando el pelo de la gente se mueve alrededor en las pelucas, tiene que ser realmente algo real. Tiene que ser pelo real. Y parece, por el número de fotogramas por segundo que se está utilizando, y así sucesivamente, que tienes pelo moviéndose alrededor... parece real. (Diseñador de maquillaje y peluquería: Peter King, 2011)
69
Capítulo 6: Videotutorial
El siguiente tutorial funciona como soporte escrito del videotutorial presentado en
este Proyecto de Graduación, el cual está dirigido a estudiantes con un nivel intermedio
del software Autodesk 3ds Max 2010, por lo que se considera que el usuario conoce la
interface del software y las herramientas principales.
Se utilizará como videografía principal para llevar a cabo este procedimiento
práctico, información recopilada del sitio oficial de Autodesk, del especialista en
animación 3D y efectos visuales Luis Marcoux: http://area.autodesk.com/blogs/louis
6.1. Características del proyecto
En el siguiente ejercicio se aplicará la técnica de cámaras paralelas explicada en el
capítulo tres de este escrito, ya que se considera el método más preciso para generar de
forma correcta material estereoscópico. Se llevará a cabo utilizando el modificador Skew
del software Autodesk 3ds Max 2010 que permite torcer o sesgar la matriz cónica de las
cámaras para superponer sus planos de proyección de forma paralela (Cap. 3.3.2).
Existen plug-ins (software pequeños que se instalan para añadir una nueva opción
o herramienta en un software más grande) que automatizan el proceso que se explicará a
continuación, sin la necesidad de sacar cálculos o utilizar fórmulas complejas. El
siguiente tutorial explica el proceso manual de configurar una toma estereoscópica que
incluso puede ser llevado a cabo en cualquier software 3D. Se adoptó este procedimiento
ya que el autor considera importante comprender cómo se realizan los cálculos previos y
en relación a qué parámetros se miden, como experiencia previa a utilizar un plug-in que
realice el trabajo de forma automática sin comprender en profundidad su funcionamiento.
El resultado final será una imagen estereoscópica 3D para ser visualizada con
sistema rojo y cian anaglifo, por lo que se recomienda al lector contar con gafas de los
70
mismos colores para seguir este tutorial escrito y sobre todo su versión audiovisual de
forma correcta.
6.2. Reglas para crear estereoscopía confortable
Lo más importante para crear estereoscopía confortable es tratar de imitar el mundo
real de la forma más precisa posible. Para eso es importante tener en cuenta las
siguientes variables:
- El tamaño de la imagen proyectada
- La distancia del espectador a la pantalla
- La distancia interocular
Si no se tiene conocimiento de estas medidas antes del proceso de producción es
muy probable que se generen problemas de visión no confortable para el espectador, ya
que la separación de píxeles o nivel de paralaje entre la imagen izquierda y derecha será
mayor o menor dependiendo de estos datos y por lo tanto la percepción tridimensional se
verá afectada.
Cuando se cuenta con un ambiente controlado es fácil obtener estas medidas, pero
cuando el proyecto debe ser proyectado en un cine o en lugares donde el público es
numeroso, los valores varían de acuerdo a la posición de cada espectador. En este caso
debemos tomar medidas aproximadas que nos permitan ofrecer una experiencia
confortable a la mayoría de los espectadores.
En este ejemplo práctico se utilizará como medio de visualización un monitor de 22''
pulgadas, de resolución Full HD 1920x1080 píxeles, que tiene un tamaño horizontal de
71
47,5 cm. La distancia entre el monitor y el espectador será de 75 cm aproximadamente y
la distancia interocular humana promedio es de 6 cm.
Para lograr imitar a la realidad de forma precisa, cada uno de estos datos
calculados en el mundo real, corresponderán a su equivalente en el mundo virtual. El
tamaño horizontal de la imagen física debe ser proporcional al tamaño horizontal del
plano de proyección de las cámaras virtuales. La distancia entre el espectador y la
pantalla debe ser proporcional a la distancia entre las cámaras y el plano de proyección y
la distancia interocular debe ser proporcional a la distancia interaxial de las cámaras.
Para corroborar que estas medidas se correspondan las siguientes proporciones se
deben cumplir:
- La primera proporción: El tamaño horizontal de la imagen física dividida la
distancia interocular humana debe ser igual al tamaño horizontal del plano de
convergencia virtual dividida la distancia interaxial de las cámaras virtuales.
Tamaño horizontal de la imagen física / Distancia interocular
=
Tamaño horizontal del plano de convergencia / Distancia interaxial
- La segunda proporción: La distancia entre el espectador y la pantalla dividida la
distancia interocular debe ser igual a la distancia entre el plano de convergencia virtual y
la cámara dividida la distancia interaxial.
72
La distancia entre el espectador y la pantalla / La distancia interocular
=
La distancia entre el plano de convergencia y la cámara / La distancia interaxial
Se explicará a continuación cómo volcar la información recopilada en el software 3D
6.3. Pasos para crear una puesta de cámaras 3D
Antes de empezar es importante configurar las unidades del programa en
centímetros, para realizar los cálculos con una misma unidad de medida. Para lo cual hay
que dirigirse al panel Customize ubicado en la barra de herramientas, luego a la opción
Units Setup, y modificar a centímetros el Display Unit Scale y el System Unit Setup.
6.3.1. Configurar el plano de convergencia
Una vez preparada la escena 3D con sus elementos dispuestos en el espacio, lo
primero que se debe hacer es crear una cámara de tipo Free, la cual tendrá el nombre de
Cámara principal, y ubicarla encuadrando los objetos deseados. Lo siguiente será llevar
el Target de la cámara próximo al objeto más cercano, para ello luego de seleccionar la
cámara dirigirse a la paleta Modify y modificar la opción Target Distance hasta conseguir
el valor deseado.
El Target de la cámara será equivalente al plano de convergencia o nivel de la
pantalla, caracterizado por ser el punto de paralaje cero.
Es importante anotar el valor de la distancia entre la cámara y el plano de
convergencia, para así poder realizar los siguientes cálculos. Este valor se encuentra en
73
la solapa Target Distance y está representado por el número que se le haya asignado,
que en este caso es 300 cm.
Distancia entre el plano de convergencia y la cámara = 300 cm
6.3.2. Calcular la distancia interaxial
El valor de la distancia interaxial (la distancia entre la cámara izquierda y la cámara
derecha) se obtiene de multiplicar el valor de la distancia entre la cámara y el plano de
convergencia por la distancia interocular humana y luego dividir este valor por la distancia
entre el espectador y la imagen proyectada.
La distancia interaxial es igual a:
La distancia entre el plano de convergencia y la cámara * La distancia interocular
La distancia entre el espectador y la pantalla
300 * 6
75
La distancia interaxial = 24 cm
Una vez obtenido este valor ya se pueden ubicar las cámaras estéreo en el
software 3D, para ello hay que crear dos nuevas cámaras de tipo Free y ubicarlas una a
la izquierda y otra a la derecha de la Cámara principal. Para mantener un orden es
importante asignarle un nombre a cada una, Cámara izquierda y Cámara derecha
respectivamente.
74
Con la herramienta Link, ubicada en la parte lateral izquierda de la barra de
herramientas, enlazar ambas cámaras estéreo a la Cámara principal. Esto será de gran
utilidad en el caso de tener que realizar un re-encuadre o un movimiento de cámara, por
lo que se animará únicamente la Cámara principal y las cámaras estéreo, al estar
enlazadas, corresponderán de forma exacta al mismo movimiento.
El siguiente paso será asignarle el valor de la distancia interaxial a las cámaras
estéreo, que en este caso es 24 cm, por lo que le corresponderá la mitad de este valor a
cada cámara, -12 a la Cámara izquierda y 12 a la Cámara derecha. Un vez seleccionada
alguna de las dos cámaras es importante siempre prestar atención al sistema de
coordenadas espacial que esté seleccionado, llamado en inglés Reference Coordinate
System y ubicado en la barra de herramientas superior.
Esta opción determina qué plano de coordenadas se usa como referencia para
cualquier modificación espacial que se le haga a un objeto. Por lo tanto dependiendo de
la opción que esté seleccionada, el objeto se va a escalar, mover o rotar en relación a
una orientación espacial distinta, por ello resulta tan importante seleccionar esta opción
de forma correcta. En este ejercicio se van a utilizar dos de estas opciones, el modo
Local y el modo Parent, la primera opción permite mover el objeto seleccionado en
relación a su propia orientación y la segunda opción permite mover el objeto seleccionado
en relación q la orientación del objeto al cual esté enlazado o emparentado.
Para asignar la distancia interaxial seleccionar la Cámara izquierda, seleccionar la
herramienta Move y en este caso elegir como sistema de coordenadas el modo Parent.
Esto va a permitir mover la Cámara izquierda en relación al punto de pivote y orientación
de la Cámara principal, a la que fue enlazada anteriormente. Por lo tanto ahora al
modificar a -12 el valor del eje X, la Cámara izquierda se moverá esa distancia
interpretando como punto 0 la posición en el eje X de la Cámara principal. Realizar el
75
mismo procedimiento con la Cámara derecha y asignarle el valor de 12 positivo al eje X,
para que se ubique hacia la derecha de la Cámara principal.
Lo siguiente será aplicar el modificador de oblicuidad llamado Skew para lograr que
las cámaras virtuales converjan en el mismo plano. Con la Cámara izquierda
seleccionada dirigirse al panel Modify luego a la solapa Modifier List y seleccionar el
modificador Skew, repetir la misma operación para la Cámara derecha. Luego en la
ventana Parameters, modificar el valor de la opción Aumont en ambas cámaras, colocar
un valor positivo para la Cámara derecha y un valor negativo para la Cámara izquierda,
de tal manera que se superpongan completamente con el Target de la Cámara principal.
El valor en ambas cámaras debe ser el mismo, aunque positivo en una y negativo en la
otra, en este caso se asignó un valor de 1,93 cm.
6.3.3. Calcular el tamaño horizontal del plano de convergencia
Una vez obtenido el valor de la distancia interaxial y habiendo definido el valor de la
distancia entre las cámaras y su Target, es momento de calcular el tamaño horizontal del
plano de convergencia de las cámaras. Este valor se calcula multiplicando la distancia
interaxial de las cámaras virtuales por el tamaño horizontal de la imagen física sobre la
distancia interocular.
El tamaño horizontal del plano de convergencia es igual a:
Tamaño horizontal de la imagen física * La distancia interaxial
La distancia interocular
76
47,5 * 24
6
Tamaño horizontal del plano de convergencia = 190 cm
Pero en este punto resulta haber un inconveniente, en el software 3ds Max 2010 no
existe un parámetro que modifique de forma directa el tamaño horizontal del plano de
proyección de una cámara. La manera para realizar esta operación es ajustar el FOV
(field of view o campo de visión) de la cámara, que es equivalente al ángulo de visión de
la misma. Cuanto mayor sea este ángulo, mayor será el registro horizontal de la cámara,
por lo tanto se modificará indirectamente el tamaño horizontal del plano de proyección de
la cámara
Es imposible saber, sin hacer algún cálculo previo, cuál es el ángulo indicado que
se le debe asignar al FOV de la cámara para generar un determinado tamaño horizontal
en su plano de proyección.
6.3.4. Calcular el FOV correcto de la cámara
Para calcular el FOV de la cámara existe la siguiente fórmula, que calcula el ángulo
correcto que se le debe asignar a este parámetro para lograr un determinado tamaño
horizontal en su plano de proyección.
FOV = 2 *atan Tamaño horizontal del plano de convergencia
2 * La distancia entre el plano de convergencia y la cámara
77
FOV = 2 *atan 190
2 * 300
FOV = 35,14
El siguiente paso será aplicar este valor al FOV de cada una de las tres cámaras.
Para ello seleccionar alguna de las cámaras, dirigirse al panel Modify y buscar el
parámetro FOV para modificarlo.
6.3.5. Calcular la zona de confort
Luego de aplicar estas medidas a cada uno de los parámetros de las cámaras, es
importante verificar que los elementos dispuestos en la escena se encuentren dentro de
la zona de confort visual o zona efectiva estereoscópica (Cap 3.5.3.)
Para ello es preciso medir esta zona con la mitad de la distancia del target de la
cámara como referencia, calculando una mitad desde el target hacia las cámaras o zona
de paralaje negativo, y otra mitad desde el target hacia la dirección opuesta a las
cámaras o zona de paralaje positivo. De esta manera se define la zona de confort frontal
y la zona de confort posterior, como grafica la siguiente imagen:
Como se puede observar, en la configuración realizada los objetos de la escena
quedan ubicados por fuera de la zona de confort visual. Como se explicó con
anterioridad, todo elemento situado por fuera de esta zona resulta no confortable para la
vista del espectador, ya que la distancia entre la vista izquierda y la vista derecha es tan
grande que el espectador percibe una visión doble y no logra fusionar ambas vistas para
crear una sola, en inglés este problema es llamado ghosting effect.
78
Para solucionar este inconveniente existen dos opciones:
- La primera opción es reducir el mundo escalando todos los objetos del cuadro
para ubicarlos dentro de la zona efectiva. En este caso el encuadre inicial configurado se
modificará
- La segunda opción es reducir la distancia interaxial. Al reducir la distancia
interaxial se logra escalar la zona de confort, en el caso de dividirla por dos se lograría
escalar la zona de confort al doble manteniendo el mismo encuadre de las cámaras. En
este caso escalar al doble la zona de confort no es suficiente ya que aún sigue siendo
pequeña; por lo que, para solucionar este problema, es necesario dividir al menos por
tres a la distancia interaxial configurada inicialmente.
Una vez en el software 3D, lo siguiente será dividir por tres la distancia interaxial:
La distancia interaxial inicial = 24 cm
24
3
Nueva distancia interaxial = 8 cm
Como consecuencia de esta modificación, habrá que corregir el valor del parámetro
Aumont del modificador Skew hasta lograr que los planos de proyección de las cámaras
estéreo vuelvan a coincidir con el plano de proyección de la Cámara principal.
79
En este punto la puesta de cámaras estéreo esta lista, por lo tanto es el momento
de dejar a punto los materiales de los objetos y la iluminación de la escena, realizar todas
las pruebas de Render necesarias, animar la Cámara principal, en el caso de que sea
necesario, manteniendo siempre los objetos dentro de la zona de confort, y dejar listo el
proyecto para el Render final.
6.3.6. Realizar el render desde el software 3D
Una vez realizada esta modificación, el proyecto 3D está listo para el Render final
de la escena. Para ello utilizaremos la opción de Batch Render, que se ubica en la
pestaña Rendering de la barra de herramientas superior y permite configurar una
sucesión de distintos procesos de Render para que se disparen de forma consecutiva.
Estas imágenes creadas desde el software 3D serán importadas en el software de
composición para crear la imagen final en el sistema anaglifo.
En el menú del Batch Render dirigirse al botón Add para crear una nueva vista, la
cual tendrá el nombre de Cam_izquierda. Luego en la pestaña Camera seleccionar la
Cámara izquierda, y finalmente mediante el botón Output Path elegir la carpeta de
destino y el formato de video o de secuencia de imágenes conveniente. Realizar el
mismo procedimiento con la Cámara derecha, de esta manera se habrán creado dos
vistas listas para exportar, lo único que queda es presionar el botón de Render para
comenzar el proceso.
6.3.7. Combinar las vistas en el software de composición
Lo siguiente será importar ambas vistas en el software de composición, en este
caso se utilizará Adobe After Effects CS5. Una vez importados los archivos, crear una
nueva composición con las características del material importado, en este caso será de
1920x1080 píxeles de resolución a 25 cuadros por segundo. Luego arrojar las dos vistas
80
a la línea de tiempo y ubicar la vista izquierda por encima de la vista derecha. El objetivo
de este proceso será combinar ambas imágenes sustrayendo algunos canales del
sistema de color RGB (red green and blue).
La vista izquierda debe estar teñida de rojo, por lo tanto se deben sustraer o
desactivar los canales azul y verde, y la vista derecha debe estar teñida de cian, por lo
tanto habrá que desactivar únicamente el canal rojo, ya que la mezcla entre el canal
verde y el azul forman el cian. Para ello seleccionar la vista izquierda y dirigirse al panel
Effect luego a Channel y luego a Shift Channels. En los parámetros del efecto en este
caso seleccionar la opción Full off para el canal verde y el canal azul, para desactivar
ambos canales. Repetir el mismo procedimiento para la vista derecha y seleccionar la
opción Full Off en el canal rojo.
El siguiente paso será fusionar ambas vistas, para ello seleccionamos la vista
izquierda, que debe estar por encima de la vista derecha, este detalle es importante ya
que de lo contrario se generará una ilusión de profundidad 3D incorrecta. Luego enla
línea de tiempo seleccionar la opción de modo de fusión Screen que se encuentra en la
columna Mode. De esta manera, ambas vistas se combinarán convirtiéndose en una
imagen para ser visualizada con lentes anaglifos rojos y azules, por lo que en este punto
el proyecto está listo para el render final.
Otro camino para lograr el mismo resultado es utilizar el efecto 3D glasses. Para
ello se debe seleccionar cualquiera de las vistas en la línea de tiempo y dirigirse al panel
Effect luego a Perspective y seleccionar 3D glasses. En la ventana del efecto seleccionar
en las opción Left View la vista izquierda y en Right View la vista derecha. Luego en la
opción 3D view seleccionar el método de salida indicado, permite en este caso configurar
el sistema lado a lado y arriba y abajo (cap. 3.4.)
81
Para realizar el render final seleccionar la pestaña Composition ubicada en la barra
de tareas superior, luego Add to Render Queue y seleccionar el formato de video y el
codificador que sea necesario, luego presionar el botón Render.
82
Conclusiones
Se ha indagado con profundidad en todos los aspectos teórico-técnicos
concernientes al uso y aplicación de la estereoscopía. Se ha podido con ello, tener
conocimiento y dimensión de los grandes esfuerzos de producción que conlleva la
decisión de trabajar con material estereoscópico.
Como conclusión principal es preciso decir que filmar una película en 3D no es un
detalle menor, implica un importante incremento en el presupuesto final y un cambio de
gran magnitud en la metodología de trabajo de todos los departamentos técnicos y
artísticos. Partiendo de la base que se maneja el doble de material que en filmaciones
tradicionales en 2D, esto implica el doble de tiempo de procesamiento de todo el material
trabajado, afectando en un principio de forma directa al sector de edición, efectos
visuales y post-producción. También al sector de producción por el equipamiento que
deberá manejar, teniendo que preparar distintos sistemas de cámaras de gran
complejidad, manejarlos y transportarlos de locación en locación.
En Argentina la cinematografía 3D es un proceso que recién en este momento
comienza a aplicarse, un ejemplo de ello es la próxima película del famoso director Juan
José Campanella llamada Metegol que se estrenará en junio del 2013, en la cual se
contrató a un equipo técnico altamente capacitado para lograr un resultado similar a las
películas de animación 3D más competentes del mercado internacional. La presencia de
profesionales de primera línea que datan de haber trabajado en los estudios más
importantes del mundo como Pixar Animation Studios e Industrial Light & Magic. Por ello
este trabajo se ha encargado de hacer un recorrido histórico, teórico y técnico, ya que su
autor considera un tema actual de gran relevancia para los jóvenes profesionales
argentinos.
83
Como conclusión secundaria, más allá de haber ahondado de forma principal en el
aspecto teórico-técnico de la estereoscopía, es importante tener presente que como toda
técnica o recurso gráfico debe responder al aspecto comunicacional del film, es decir, a
su contenido narrativo. No se debe perder de vista, bajo ningún aspecto, que lo principal
en una película o en cualquier tipo o forma de comunicación, es el contenido. Suele
suceder en producciones cinematográficas comerciales que el aspecto técnico se ubica
por encima del aspecto narrativo. Películas de grandes efectos visuales y especiales,
donde el fin termina siendo la forma y no el contenido. Toda forma que no responda de
forma justificada a su contenido narrativo no se sostiene y no tiene un propósito de existir.
Es así como suceden los grandes fracasos de producción, donde grandes películas de
cientos de millones de dólares fracasan comercialmente en relación a la audiencia
estimada por sus productores y a las ganancias pretendidas.
84
Referencias bibliográficas
Aumont, J., Bergala, A., Marie, M. y Vernet, M. (1983). Estética del cine: espacio fílmico,
montaje, narración, lenguaje. (1° ed. 1° reimp.: 2008: Buenos Aires). Buenos Aires: Paidós.
Bazín, A. (1973). Orson Welles. Ed. Fernando Torres. Citado en: Aumont, J., Bergala, A.,
Marie, M., Vernet, M. (1983). Estética del cine: espacio fílmico, montaje, narración, lenguaje. (1° ed. 1° reimp.: 2008: Buenos Aires). Buenos Aires: Paidós.
Bohórquez M. (2008). El diseño gráfico y el cortometraje de ficción. En Actas de Diseño
5: Diseño en Palermo, III encuentro Latinoamericano de Diseño. Buenos Aires: Universidad de Palermo, Facultad de Diseño y Comunicación.
Epelbaum S. (2010, octubre). Historia de la Estereoscopía y sus aplicaciones. Archivos
de Oftalmología de Buenos Aires, 81 (2), 62-67. (Esta indicado: Volumen 81, número 02, de la página 62 a la 67).
Fernández Sánchez, M. C. (2000): Imágenes en tres dimensiones. Revista Latina de
Comunicación Social, 31. Recuperado el 16 de Septiembre de 2010. Disponible en: http://www.ull.es/publicaciones/latina/aa2000kjl/z31jl/87sanchez.htm
García, P. F. (2011). Hiperrealidad y Simulacro: Efectos de Inmersión en el Cine 3D. En
Actas IV Congreso Internacional sobre Análisis Fílmico: Nuevas tendencias e hibridaciones de los discursos audiovisuales en la cultura digital contemporánea. Bort Gual, I., García Catalán, S. y Martín Núñez, M. (Eds.)
Mendiburu, B. (2012). 3D TV and 3D Cinema: Tools and Processes for Creative
Stereoscopy. Nueva York: Elsevier. The Hobbit Team (2011). Peter Jackson’s Video Blogs on the making of The Hobbit:
Production video #4. Recuperado de: http://www.thehobbitblog.com/production-video-4/
85
Bibliografía Aumont, J., Bergala, A., Marie, M. y Vernet, M. (1983). Estética del cine: espacio fílmico,
montaje, narración, lenguaje. (1° ed. 1° reimp.: 2008: Buenos Aires). Buenos Aires: Paidós.
Autodesk, inc. (2013). Louis Marcoux Tutorials. Recuperado de: Nueva York:
http://area.autodesk.com/blogs/louis Autodesk, inc. Stereoscopic Filmmaking Whitepaper. The Business and Technology of
Stereoscopic Filmmaking. (2008) Barry, SR. Fixing My Gaze: A Scientist’s Journey into Seeing in Three Dimensions. New
York: Basic Books, 2009. Bazín, A. (1973). Orson Welles. Ed. Fernando Torres. Citado en: Aumont, J., Bergala, A.,
Marie, M., Vernet, M. (1983). Estética del cine: espacio fílmico, montaje, narración, lenguaje. (1° ed. 1° reimp.: 2008: Buenos Aires). Buenos Aires: Paidós.
Bohórquez, M. (2008). El diseño gráfico y el cortometraje de ficción. En Actas de Diseño
5: Diseño en Palermo, III encuentro Latinoamericano de Diseño. Buenos Aires: Universidad de Palermo, Facultad de Diseño y Comunicación.
Epelbaum, S. (2010, octubre). Historia de la Estereoscopía y sus aplicaciones. Archivos
de Oftalmología de Buenos Aires, 81 (2), 62-67. (Esta indicado: Volumen 81, número 02, de la página 62 a la 67).
Fernández Sánchez, M. C. (2000): Imágenes en tres dimensiones. Revista Latina de
Comunicación Social, 31. Recuperado el 16 de Septiembre de 2010. Disponible en: http://www.ull.es/publicaciones/latina/aa2000kjl/z31jl/87sanchez.htm
García, P. F. (2011). Hiperrealidad y Simulacro: Efectos de Inmersión en el Cine 3D. En
Actas IV Congreso Internacional sobre Análisis Fílmico: Nuevas tendencias e hibridaciones de los discursos audiovisuales en la cultura digital contemporánea. Bort Gual, I., García Catalán, S. y Martín Núñez, M. (Eds.)
González Gil, J. A., de Francisco, J. C., Marco, J., y Valero Ruiz, C. La imagen
estereoscópica en formato digital, un nuevo medio de expresión. Departamento de Ingeniería de Diseño y Fabricación. Centro Politécnico Superior, Universidad de Zaragoza.
Jacob, O. y Testut, L. (1972). Tratado de anatomía topográfica. Barcelona: Salvat
Editores.
86
Lipton, L. (1940). Foundations of the stereoscopic cinema. Nueva York: Van Nostrand
Reinhold Publishing. Mendiburu, B. (2012). 3D TV and 3D Cinema: Tools and Processes for Creative
Stereoscopy. Nueva York: Elsevier. Pérez, R, Tania, Valverde, V. Fan Alí, Peñaherrera y H. William. (2005). Estudio del
Sistema de Televisión Estereoscópica como una aplicación de la televisión digital. Escuela Politécnica Nacional, XIX Jornadas en Ingeniería Eléctrica y Electrónica, vol. 19.
Roveda, C. E. y Roveda, J. M.. (1979). Manual de oftalmología. Buenos Aires: López
Libreros Editores. StereoGraphics Corporation. Developers' Handbook. (1997). The Hobbit Team (2011). Peter Jackson’s Video Blogs on the making of The Hobbit:
Production video #4. Recuperado de: http://www.thehobbitblog.com/production-video-4/

















