
Proyecto Fin de Carrera Ingenier a Aeron autica: DETECCION...
112
Proyecto Fin de Carrera Ingenier´ ıa Aeron´ autica: DETECCI ´ ON Y AN ´ ALISIS DE BIFURCACIONES DE HOPF EN SISTEMAS AEROEL ´ ASTICOS Autor: Antonio Jos´ e Luque B´ arcenas Tutores: Emilio Freire Mac´ ıas Alejandro Jos´ e Rodr´ ıguez Luis Departamento de Matem´atica Aplicada II Escuela T´ ecnica Superior de Ingenier´ ıa Universidad de Sevilla Sevilla, 2018
Transcript of Proyecto Fin de Carrera Ingenier a Aeron autica: DETECCION...

Proyecto Fin de CarreraIngenierıa Aeronautica:
DETECCION Y ANALISIS DE BIFURCACIONES DEHOPF EN SISTEMAS AEROELASTICOS
Autor:
Antonio Jose Luque Barcenas
Tutores:
Emilio Freire Macıas
Alejandro Jose Rodrıguez Luis
Departamento de Matematica Aplicada II
Escuela Tecnica Superior de Ingenierıa
Universidad de Sevilla
Sevilla, 2018


Proyecto Fin de CarreraIngenierıa Aeronautica:
DETECCION Y ANALISIS DE BIFURCACIONES DEHOPF EN SISTEMAS AEROELASTICOS
Autor:
Antonio Jose Luque Barcenas
Tutores:
Emilio Freire MacıasCatedratico de Universidad
Alejandro Jose Rodrıguez LuisCatedratico de Universidad
Departamento de Matematica Aplicada II
Escuela Tecnica Superior de Ingenierıa
Universidad de Sevilla
Sevilla, 2018


Proyecto Fin de Carrera: Deteccion y Analisis de Bifurcaciones de Hopf en Sistemas Aeroelasticos
Autor: Antonio Jose Luque Barcenas
Tutores: Emilio Freire Macıas
Alejandro Jose Rodrıguez Luis
el tribunal nombrado para juzgar el trabajo arriba indicado, compuesto por los siguientes profesores:
Presidente:
Vocal/es:
Secretario:
acuerdan otorgarle la calificacion de:
El Secretario del Tribunal
Fecha:


A mi familia,especialmente a las mujeres de mi vida:
mi madre, mi tıa y mi hermana.
I

II

“Et cognoscetis veritatem, et veritas liberabit vos” (Io 8,32)
III

IV
Agradecimientos
En primer lugar me gustarıa agradecer a mis tutores Emilio y Alejandro Jose su gran ayuda en eldesarrollo de este proyecto y su inestimable amistad, ası como el haber despertado en mı un profundointeres por este campo de estudio.
Agradezco al profesor Miguel Perez-Saborid su asesoramiento en algunos temas del proyecto.
Agradezco a mi familia, en especial a mi madre, a Andres, a Alvaro y a Ruben, su incondicionalapoyo, amor y comprension; ella y ellos son los principales culpables de que haya terminado la ca-rrera. A don Enrique quiero dar gracias por el animo y por sus sabios consejos en momentos cruciales.
Al rector y a toda la familia que compone el Seminario Diocesano de Jaen doy gracias por su apoyo.
Y al Seminario Metropolitano de Sevilla agradezco el acogerme y acompanarme en los ultimosmeses de una etapa muy importante de mi vida que con este proyecto se cierra.
“No ceso de dar gracias a Dios por vosotros recordandoos en mis oraciones” (Ef 1, 16).
V

VI AGRADECIMIENTOS

Resumen
Este proyecto se enmarca dentro de la teorıa de bifurcaciones de sistemas dinamicos.Se estudia un tipo de inestabilidad que aparece en los sistemas aeroelasticos, denomi-nada flutter o flameo, y para ello se han utilizado tres modelos distintos que tienenen cuenta fenomenos no lineales procedentes de la rigidez del sistema y de las cargasaerodinamicas. Se observa la aparicion de bifurcaciones de Hopf con los consecuentesciclos lımites de oscilacion, estables en unos casos e inestables en otros, en el puntode flutter, debido a la introduccion de dichas no linealidades en el sistema dinamico.Quedan patentes las diferencias entre los distintos modelos, la consideracion de la en-trada en perdida del perfil y la forma en que afecta la estacionariedad del flujo en laaparicion del flutter.

VIII AGRADECIMIENTOS

Abstract
This work is basically included in the Bifurcation Theory of Dynamical Systems. Itis devoted to study a type of instability which appears in aeroelastic systems, that iscalled flutter. For this purpose we use three different models which take into accountnonlinearities due to stiffness and aerodynamics loads. We observe that Hopf bifurca-tions occur at the flutter point, then a limit cycle emerges from an equilibrium (stableor unstable) when we introduce nonlinearities in the aeroelastic system. The resultswe obtain show somes differences between the models and we can see how the additionof stall and unsteady characteristics of the flow affects to flutter point.

X AGRADECIMIENTOS

Lista de sımbolos y abreviaturas
Mayusculas
Aα Amplitud del LCO para torsion.Ah Amplitud del LCO para flexion.C(k) Funcion de Theodorsen.D Funcion de disipacion de Rayleigh.Df Determinante de flutter.Iα Momento de inercia del perfil en el eje elastico.Icg Momento de inercia del perfil en el centro de gravedad.Im Parte imaginaria.L Sustentacion del perfil aerodinamico.L Lagrangiana del sistema; L = T − V .LCO Acronimo del termino ingles Limit Cycle Oscillation.M Momento aerodinamico.O Terminos de orden superior.Qα Momento aerodinamico generalizado.Qh Fuerza aerodinamica generalizada.Re Parte real.Sα Momento estatico del perfil en el eje elastico.T Energıa cinetica.U Velocidad del fluido.Uf Velocidad de flutter.V Energıa potencial.
Minusculas
a Distancia adimensional del centro del perfil al eje elastico.b Semicuerda del perfil.c Cuerda del perfil.cα Coeficiente de amortiguamiento en torsion.ch Coeficiente de amortiguamiento en flexion.clα Pendiente de la curva de sustentacion.cs Parametro asociado a la entrada en perdida.cmα Pendiente de la curva de momento aerodinamico.gα Coeficiente de amortiguamiento en torsion adimensional.gh Coeficiente de amortiguamiento en flexion adimensional.h Movimiento vertical del perfil, grado de libertad en flexion.i, j Unidad imaginaria; i =
√−1.
k Frecuencia reducida; k = ωb/U .kα Coeficiente de rigidez en torsion.kh Coeficiente de rigidez en flexion.m Masa del perfil aerodinamico.mT Masa total del sistema.mw Masa del ala.qi Coordenada generalizada.

XII AGRADECIMIENTOS
t Tiempo.xα Distancia adimensional entre el eje elastico y el centro de gravedad.xcg Posicion adimensional del centro de gravedad del perfil.
Letras griegas
α Movimiento de torsion del perfil. Angulo de ataque.
αe Angulo de ataque elastico.
αeff Angulo de ataque efectivo.
αr Angulo de ataque rıgido.α Velocidad angular del movimiento de torsion.α Aceleracion angular del movimiento de torsion.ε Cantidad muy pequena ( 1).θ Fase de la oscilacion.λ Autovalor.π Numero pi.σU Termino de perturbacion.ρ Densidad local del fluido.ω Frecuencia de oscilacion.ωα Frecuencia natural de torsion.ωf Frecuencia a la que se produce el flutter.ωh Frecuencia natural de flexion.

Indice general
Introduccion 1Estabilidad de sistemas dinamicos y bifurcaciones . . . . . . . . . . . . . . . . . . . . . . . . 1Flutter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Objetivos del proyecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1. Herramientas 51.1. MATLAB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2. AUTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2. Estudio analıtico-numerico de distintos modelos de flutter 92.1. Modelo clasico de flutter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1. Calculo de la energıa cinetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.1.2. Calculo de la energıa potencial . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.1.3. Calculo de la funcion de disipacion . . . . . . . . . . . . . . . . . . . . . . . . . 102.1.4. Calculo de las ecuaciones del movimiento . . . . . . . . . . . . . . . . . . . . . 102.1.5. Fuerzas aerodinamicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.1.6. Aproximacion de Theodorsen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.1.7. Limitaciones del modelo clasico de flutter . . . . . . . . . . . . . . . . . . . . . 16
2.2. Modelo lineal del problema aeroelastico . . . . . . . . . . . . . . . . . . . . . . . . . . 172.2.1. Solo actuan fuerzas posicionales . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.2.2. Solo actuan fuerzas dependientes de la velocidad . . . . . . . . . . . . . . . . . 202.2.3. Modelo con “flutter puro”. Resonancia 1:1 . . . . . . . . . . . . . . . . . . . . . 222.2.4. Modelo giroscopico puro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3. Analisis de la estabilidad del sistema 273.1. Taxonomıa de bifurcaciones en sistemas continuos . . . . . . . . . . . . . . . . . . . . 27
3.1.1. Bifurcaciones de Codimension 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.1.2. Bifurcaciones de Codimension n ≥ 2 . . . . . . . . . . . . . . . . . . . . . . . . 30
3.2. Modelos no lineales de flutter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.2.1. Modelo con efecto de perdida . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.2.2. Modelo cuasiestacionario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.2.3. Modelo no estacionario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.3. Estimacion del punto de bifurcacion de Hopf en el sistema aeroelastico . . . . . . . . . 383.3.1. Criterio de Routh-Hurwitz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.3.2. Aproximacion simbolica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393.3.3. Extension para tres grados de libertad . . . . . . . . . . . . . . . . . . . . . . . 40
3.4. Efecto de la aerodinamica no estacionaria . . . . . . . . . . . . . . . . . . . . . . . . . 41
4. Continuacion numerica de equilibrios y de orbitas periodicas 454.1. Metodos de continuacion: analisis de las ecuaciones en el espacio de estados . . . . . . 454.2. Modelo cuasiestacionario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.2.1. Parametros y variables en AUTO7P . . . . . . . . . . . . . . . . . . . . . . . . 464.2.2. Deteccion del punto de bifurcacion de Hopf . . . . . . . . . . . . . . . . . . . . 464.2.3. Posibles degeneraciones. Caracter subcrıtico y supercrıtico . . . . . . . . . . . . 474.2.4. Mapas de parametros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.2.5. Comparacion con el modelo lineal . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3. Modelo no estacionario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
XIII

XIV INDICE GENERAL
4.3.1. Parametros y variables en AUTO7P . . . . . . . . . . . . . . . . . . . . . . . . 534.3.2. Deteccion del punto de bifurcacion de Hopf . . . . . . . . . . . . . . . . . . . . 534.3.3. Posibles degeneraciones. Caracter subcrıtico y supercrıtico . . . . . . . . . . . . 534.3.4. Mapas de parametros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.3.5. Comparacion modelo lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.4. Modelo con efecto de perdida I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.4.1. Parametros y variables en AUTO7P . . . . . . . . . . . . . . . . . . . . . . . . 634.4.2. Deteccion del punto de bifurcacion de Hopf . . . . . . . . . . . . . . . . . . . . 634.4.3. Posibles degeneraciones. Caracter subcrıtico y supercrıtico . . . . . . . . . . . . 634.4.4. Mapas de parametros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.4.5. Coexistencia de orbitas periodicas . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.5. Modelo con efecto de perdida II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.5.1. Parametros y variables en AUTO7P . . . . . . . . . . . . . . . . . . . . . . . . 684.5.2. Deteccion del punto de bifurcacion de Hopf . . . . . . . . . . . . . . . . . . . . 684.5.3. Coexistencia de orbitas periodicas . . . . . . . . . . . . . . . . . . . . . . . . . 684.5.4. Posibles degeneraciones. Caracter subcrıtico y supercrıtico . . . . . . . . . . . . 714.5.5. Mapas de parametros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Conclusiones 77Posibles lıneas futuras de investigacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77Conclusiones finales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
A. Codigos programa AUTO7P 79

Indice de figuras
1. Ejemplo de conjunto de bifurcaciones en un plano de parametros (bifurcacion de Hopfdegenerada) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2. Triangulo de Collar. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1. Logo de MATLAB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2. Ejemplo de fichero c.xxx en AUTO7P. . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1. Modelo de perfil aerodinamico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2. Funcion de Theodorsen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3. Velocidad de flutter en el modelo de Theodorsen. . . . . . . . . . . . . . . . . . . . . 172.4. Caso general para U < Uf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.5. Caso general para U = Uf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.6. Caso general para U > Uf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.7. Evolucion autovalores caso posicional. . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.8. Evolucion autovalores caso giroscopico. . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.1. Bifurcacion silla-nodo. a) x = µ− x2, b) x = µ+ x2. . . . . . . . . . . . . . . . . . . . 283.2. Bifurcacion transcrıtica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.3. Bifurcacion tridente. a) Caso supercrıtico, b) Caso subcrıtico. . . . . . . . . . . . . . . 303.4. Bifurcacion de Hopf supercrıtica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.5. Bifurcacion de Hopf subcrıtica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.6. Singularidades en bifurcaciones de codimension 2. . . . . . . . . . . . . . . . . . . . . 313.7. Cl(α) medido en tunel de viento [2]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.8. Velocidad de flutter en funcion de ε. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.9. Frecuencia de flutter en funcion de ε. . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.1. Amplitud del LCO en funcion de la velocidad flutter. . . . . . . . . . . . . . . . . . . 474.2. Caracter de la bifurcacion de Hopf en funcion de kα1
. . . . . . . . . . . . . . . . . . . 484.3. Velocidad de flutter, U, frente a ρ para kα1
= 5.2 N/m. . . . . . . . . . . . . . . . . . 494.4. Velocidad de flutter, U, frente a ρ para kα1
= 6. . . . . . . . . . . . . . . . . . . . . . 494.5. Velocidad de flutter, U, frente a a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.6. Velocidad de flutter, U, frente a ch. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.7. Velocidad de flutter, U, frente a cα. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.8. Velocidad de flutter, U, frente a xα. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.9. Amplitud del LCO en funcion de la velocidad flutter. . . . . . . . . . . . . . . . . . . 544.10. Diagrama de bifurcaciones de x1/α. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.11. Velocidad de flutter, U, frente a kα0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.12. Detalle del mapa U frente a kα0 de la figura 4.11 (I). . . . . . . . . . . . . . . . . . . 564.13. Detalle del mapa U frente a kα0
de la figura 4.11 (II). . . . . . . . . . . . . . . . . . . 564.14. Plano global U -kα0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.15. Curva de Hopf del origen en el plano U -a. . . . . . . . . . . . . . . . . . . . . . . . . . 594.16. Curva de Hopf de los equilibrios no triviales en el plano U -a. . . . . . . . . . . . . . . 594.17. Detalle del plano U -a (I). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604.18. Detalle del plano U -a (II). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604.19. Plano U -cα. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.20. Plano a-ch. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.21. Detalle del plano a-ch. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.22. Plano U -ρ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
XV

XVI INDICE DE FIGURAS
4.23. U frente a la norma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 644.24. Detalle segunda Hopf. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.25. Plano U -a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 664.26. Plano U -cα. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 664.27. Plano U -ρ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 674.28. Coexistencia de dos orbitas periodicas. . . . . . . . . . . . . . . . . . . . . . . . . . . 674.29. Velocidad U frente a la norma L2NORM . . . . . . . . . . . . . . . . . . . . . . . . . 694.30. Plano U -L2NORM , rama HB2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 694.31. Plano U -Max(α). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 704.32. Plano U -Max(h). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 704.33. Plano U -L2NORM , rama HB2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 714.34. Plano U -kα0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 724.35. Plano U -a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 734.36. Detalle del plano U -a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 734.37. Plano U -ρ. Ramas del origen y de los equilibrios no triviales. . . . . . . . . . . . . . . 744.38. Plano U -ρ. Rama del origen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 744.39. Modelo tridimensional de semiala. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77

Indice de tablas
1.1. Tipos de soluciones y sus codigos de identificacion. . . . . . . . . . . . . . . . . . . . . 8
2.1. Parametros fısicos del modelo aeroelastico. . . . . . . . . . . . . . . . . . . . . . . . . . 192.2. Velocidad y frecuencia de flutter caso [2]. . . . . . . . . . . . . . . . . . . . . . . . . . 192.3. Velocidad y frecuencia de flutter caso [1]. . . . . . . . . . . . . . . . . . . . . . . . . . 202.4. Velocidad y frecuencia de flutter caso [14]. . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1. Parametros del modelo no lineal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.2. Coeficientes de la matriz B(U). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.3. Coeficientes de la matriz M−1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.4. Coeficientes de la matriz Fns(U). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.5. Coeficientes del polinomio caracterıstico P (λ). . . . . . . . . . . . . . . . . . . . . . . . 393.6. Velocidad y frecuencia de inicio de la Hopf para el modelo cuasiestacionario [1]. . . . . 403.7. Velocidad y frecuencia de inicio de la Hopf para el modelo con efecto de perdida [2]. . 403.8. Velocidad y frecuencia de inicio de la Hopf para el modelo cuasiestacionario [1]. . . . . 413.9. Velocidad y frecuencia de inicio de la Hopf para el modelo con efecto de perdida [2]. . 41
4.1. Valores iniciales de los parametros variables de AUTO7P. . . . . . . . . . . . . . . . . 464.2. Valores de los parametros que no varıan. . . . . . . . . . . . . . . . . . . . . . . . . . . 464.3. Degeneraciones de la bifurcacion de Hopf en el plano U -ρ. . . . . . . . . . . . . . . . . 484.4. Valores iniciales de los parametros variables de AUTO7P. . . . . . . . . . . . . . . . . 534.5. Valores parametros que permanecen constantes. . . . . . . . . . . . . . . . . . . . . . . 534.6. Puntos singulares en el plano U -kα0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.7. Puntos singulares en el plano U -kα0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.8. Puntos singulares en el plano U -a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.9. Valores iniciales de los parametros variables de AUTO7P. . . . . . . . . . . . . . . . . 634.10. Valores parametros que permanecen constantes. . . . . . . . . . . . . . . . . . . . . . . 634.11. Puntos singulares en el plano U -kα0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 644.12. Valores iniciales de los parametros variables de AUTO7P. . . . . . . . . . . . . . . . . 684.13. Valores parametros que permanecen constantes. . . . . . . . . . . . . . . . . . . . . . . 684.14. Degeneraciones en el plano U -kα0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 714.15. Degeneraciones en el plano U -cα. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 724.16. Puntos singulares en el plano U -a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 724.17. Degeneracion en el plano U -ρ de la Hopf del origen. . . . . . . . . . . . . . . . . . . . 75
XVII

XVIII INDICE DE TABLAS
Introduccion
“La duda lleva al examen y elexamen a la verdad”
Pedro Abelardo
Estabilidad de sistemas dinamicos y bifurcaciones
Un sistema dinamico es un sistema fısico o matematico que varıa con el tiempo, es decir, se pro-ducen cambios en los estados del sistema. Viene descrito por un espacio de estados junto con la reglaque determina la dinamica del sistema.
Los sistemas fısicos y matematicos se clasifican en lineales y no lineales. Un sistema dinamicopuede venir formulado por una ecuacion diferencial ordinaria o en derivadas parciales, una ecuacionen diferencias finitas, una ecuacion integral o un sistema combinacion de los anteriores. Si el siste-ma viene modelado por una ecuacion diferencial o de cualquiera de los tipos anteriores se dice quees determinista, pues permite conocer el estado del sistema para cualquier tiempo futuro, supuestoconocido su estado inicial.
Los sistemas no lineales presentan en ocasiones un comportamiento impredecible, que sera lo queentenderemos por caos. El estudio de los sistemas dinamicos no lineales comprende dos partes: unamas elemental de caracter local, que se relaciona con el estudio de sistemas lineales cuando el puntode equilibrio en torno al que se estudia el comportamiento del sistema es hiperbolico; y una partemas global en la que se ponen en evidencia comportamientos completamente nuevos con relacion alos que presentan los sistemas lineales.
Las ideas de pensadores y matematicos como Henri Poincare (1854-1912) y Aleksandr Andronov(1901-1952) dieron origen a la teorıa cualitativa de los sistemas dinamicos no lineales, y en especial,a la teorıa de bifurcaciones. Estas teorıas aportan una perspectiva global de los modos de comporta-miento de un sistema. En particular, la teorıa de bifurcaciones permite resolver una gran cantidad deproblemas no lineales sometidos a variacion parametrica.
Cuando los parametros de un sistema cambian, el retrato de estados puede cambiar, o no, geometri-camente de forma significativa. Si no se produce un cambio significativo entonces el sistema es estruc-turalmente estable. Los cambios significativos en el retrato de estados se llaman bifurcaciones.
De una forma mas precisa, la teorıa de bifurcaciones permite estudiar los atractores de un sistemano lineal, determinando las situaciones en que existe perdida de estabilidad por efectos de la variacionde determinados parametros.
El conjunto de bifurcaciones clasifica de manera condensada todos los comportamientos posiblesde un sistema y las transiciones entre ellos (bifurcaciones) cuando cambian los parametros del siste-ma. El conjunto de bifurcaciones esta compuesto por un numero finito de regiones separadas por lascorrespondientes curvas o fronteras de bifurcacion.
Las bifurcaciones se clasifican en dos grandes grupos: locales y globales.
1

2 CAPITULO 0. INTRODUCCION
Figura 1: Ejemplo de conjunto de bifurcaciones en un plano de parametros (bifurcacion de Hopfdegenerada)
Las bifurcaciones locales se llaman ası porque estan asociadas a la linealizacion del sistema nolineal, alrededor de un equilibrio, para un valor crıtico de los parametros escogidos. Puesto que en elpunto de bifurcacion el sistema pierde la estabilidad, la produccion de la bifurcacion estara asociadagenericamente a que uno de los autovalores de esta forma linealizada cruce el eje imaginario, o a quelo haga un par complejo conjugado. En el segundo caso se tiene lo que se conoce como bifurcacion deHopf, en la que un atractor puntual que sea equilibrio estable se convierte en inestable rodeado poruna oscilacion periodica estable del tipo Hopf supercrıtica. Las bifurcaciones se llaman locales porquesu aparicion es un fenomeno local que es posible captar recurriendo unicamente a la forma linealizadadel sistema dinamico no lineal.
Las bifurcaciones globales son mas complejas que las anteriores, y en su produccion estan implica-dos fenomenos globales, en el sentido de que no son reducibles a lo que sucede en un punto del espaciode estados, hay mas de un atractor involucrado en ellas. Por ejemplo, en la denominada bifurcacionhomoclina se produce la colision de un ciclo lımite con un punto de silla.
En el ejemplo de conjunto de bifurcaciones que se muestra en la figura 1, tomada de [15], se observaque las curvas de bifurcacion dividen el plano de parametros en tres regiones. Partimos de un punto dela region 1 donde el sistema posee un unico foco de equilibrio estable. Al cruzar la curva de Hopf H−de la region 1 a la 2 se ve la aparicion de un unico ciclo lımite estable que permanece al entrar en laregion 3. Si se cruza la curva de Hopf H+ se crea un ciclo inestable extra dentro del primero, mientrasque el equilibrio recupera su estabilidad. Dos ciclos de estabilidad contraria existen dentro de la re-gion 3 y desaparecen al llegar a la curva T a traves de una bifurcacion silla-nodo de orbitas periodicas.
Flutter
La aeroelasticidad es el estudio de la interaccion entre las fuerzas de inercia, las fuerzas estructu-rales y las aerodinamicas en una aeronave, estructura, superficie, etc.
3
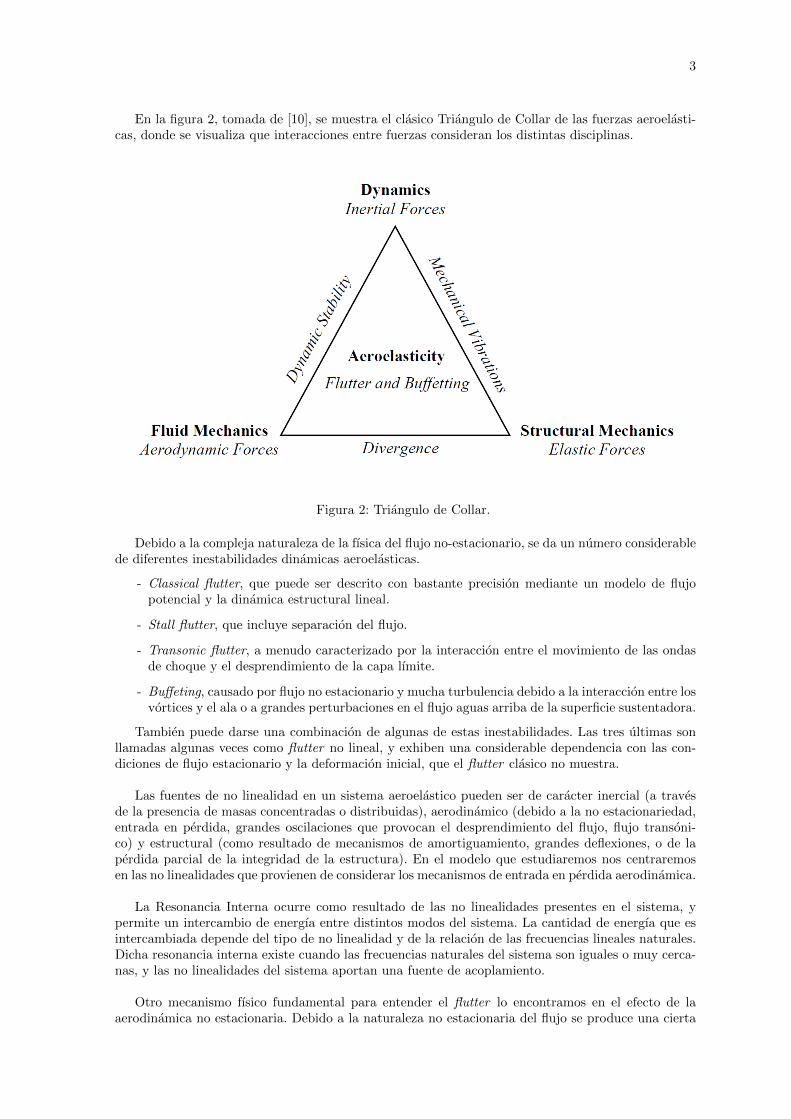
En la figura 2, tomada de [10], se muestra el clasico Triangulo de Collar de las fuerzas aeroelasti-cas, donde se visualiza que interacciones entre fuerzas consideran los distintas disciplinas.
Figura 2: Triangulo de Collar.
Debido a la compleja naturaleza de la fısica del flujo no-estacionario, se da un numero considerablede diferentes inestabilidades dinamicas aeroelasticas.
- Classical flutter, que puede ser descrito con bastante precision mediante un modelo de flujopotencial y la dinamica estructural lineal.
- Stall flutter, que incluye separacion del flujo.
- Transonic flutter, a menudo caracterizado por la interaccion entre el movimiento de las ondasde choque y el desprendimiento de la capa lımite.
- Buffeting, causado por flujo no estacionario y mucha turbulencia debido a la interaccion entre losvortices y el ala o a grandes perturbaciones en el flujo aguas arriba de la superficie sustentadora.
Tambien puede darse una combinacion de algunas de estas inestabilidades. Las tres ultimas sonllamadas algunas veces como flutter no lineal, y exhiben una considerable dependencia con las con-diciones de flujo estacionario y la deformacion inicial, que el flutter clasico no muestra.
Las fuentes de no linealidad en un sistema aeroelastico pueden ser de caracter inercial (a travesde la presencia de masas concentradas o distribuidas), aerodinamico (debido a la no estacionariedad,entrada en perdida, grandes oscilaciones que provocan el desprendimiento del flujo, flujo transoni-co) y estructural (como resultado de mecanismos de amortiguamiento, grandes deflexiones, o de laperdida parcial de la integridad de la estructura). En el modelo que estudiaremos nos centraremosen las no linealidades que provienen de considerar los mecanismos de entrada en perdida aerodinamica.
La Resonancia Interna ocurre como resultado de las no linealidades presentes en el sistema, ypermite un intercambio de energıa entre distintos modos del sistema. La cantidad de energıa que esintercambiada depende del tipo de no linealidad y de la relacion de las frecuencias lineales naturales.Dicha resonancia interna existe cuando las frecuencias naturales del sistema son iguales o muy cerca-nas, y las no linealidades del sistema aportan una fuente de acoplamiento.
Otro mecanismo fısico fundamental para entender el flutter lo encontramos en el efecto de laaerodinamica no estacionaria. Debido a la naturaleza no estacionaria del flujo se produce una cierta

4 CAPITULO 0. INTRODUCCION
alternancia en la dinamica de los torbellinos de la estela que originara un cierto desfase en el campode presiones y consecuentemente en las fuerzas aerodinamicas. Dicho desfase entre las fuerzas aero-dinamicas y el movimiento de la estructura juega un papel importante en la aparicion del mecanismode flutter.
Objetivos del proyecto
En este proyecto se plantea, en primer lugar, el estudio y la caracterizacion de un sistema dinami-co en presencia del fenomeno aeroelastico de flutter, para ello se divide en dos grandes partes. Enla primera parte se analizaran los modelos lineales que se emplean para determinar cuando un sis-tema aeroelastico presenta flutter, se utilizan varios modelos para observar que influencia tiene cadatermino o fuerza en la aparacion del flutter.
En la segunda parte se estudian modelos que tienen en cuenta los efectos no lineales que aparecenen las fuerzas aerodinamicas y en las rigideces. El estudio de estos modelos no lineales se hace mediantela herramienta matematica conocida como continuacion numerica y el objetivo primordial de estaparte es caracterizar que tipo de bifurcaciones aparecen en el sistema como consecuencia del fluttery la estabilidad y seguimiento de las orbitas periodicas que pueden aparecer.

Capıtulo 1
Herramientas
“Ora et labora et nolicontristari”.
San Benito de Nursia
1.1. MATLAB
MATLAB es un entorno de computacion y desarrollo de aplicaciones totalmente integrado, orien-tado para llevar a cabo proyectos en donde se encuentren implicados complejos calculos matematicosy la visualizacion grafica de los mismos. La palabra MATLAB es un acronimo de “MATrix LABora-tory”. MATLAB integra analisis numerico, calculo matricial, proceso de senal y visualizacion graficaen un entorno completo donde los problemas y sus soluciones son expresados del mismo modo en quese escribirıan tradicionalmente, sin necesidad de hacer uso de la programacion.
MATLAB dispone tambien en la actualidad de un amplio abanico de programas de apoyo especia-lizados, denominados Toolboxes, que extienden significativamente el numero de funciones incorporadasen el programa principal. Estos Toolboxes cubren en la actualidad practicamente casi todas las areasprincipales en el mundo de la ingenierıa y la simulacion, destacando entre ellos los de procesado deimagenes, senal, control robusto, estadıstica, analisis financiero, matematicas simbolicas, redes neu-ronales, logica difusa, identificacion de sistemas, simulacion de sistemas dinamicos, etc. Es pues unentorno de calculo tecnico, que se ha convertido en estandar en la industria, con grandes capacidadesen computacion y visualizacion numerica.
De forma coherente y sin ningun tipo de fisuras, integra los requisitos claves de un sistema decomputacion tecnico: calculo numerico, graficos, herramientas para aplicaciones especıficas y capaci-dad de ejecucion en multiples plataformas. Esta familia de productos proporciona al especialista unmedio de caracter unico, para resolver los problemas mas complejos y difıciles.
En el presente proyecto se han empleado diversas herramientas y funciones implementadas enMATLAB con el fin de calcular y visualizar el comportamiento del sistema dinamico y la evolucionde este con la variacion de los parametros oportunos en cada caso. Entre otras cosas, se ha empleado
Figura 1.1: Logo de MATLAB.
5

6 CAPITULO 1. HERRAMIENTAS
para el calculo de autovalores, la resolucion de sistemas de ecuaciones diferenciales ordinarias, lavisualizacion de resultados, el calculo parametrico, etc.
1.2. AUTO
Para el analisis de la estabilidad del sistema objeto de estudio, se hara uso de un programa llamadoAUTO (se usara la version AUTO07P), el cual permite el estudio y continuacion numerica de bifur-caciones en ecuaciones diferenciales ordinarias. Los codigos se escriben en FORTRAN, un lenguajede programacion especialmente desarrollado para calculos numericos y aplicaciones cientıficas y deingenierıa. Todo la descripcion que hacemos del programa AUTO7P la hemos tomado del manual deDoedel [9].
Este programa calcula los autovalores en los puntos de equilibrio o los multiplicadores caracterısti-cos de las orbitas periodicas y evalua unas funciones test para detectar cada tipo de bifurcacion quepueda surgir en cada punto de la continuacion.
Los codigos de programacion usados, en los que se incluyen nuestras ecuaciones y las constantesdel problema usadas para los analisis realizados, se encuentran en el anexo A al final del presenteproyecto. Despues pasaremos a detallar las ordenes para ejecutar los archivos y el significado de lasdiferentes constantes con las que trabaja el programa, ası como los resultados que nos proporcionafinalmente el programa AUTO.
El funcionamiento de AUTO se basa en dos tipos de archivos:
Fichero xxx.f90 contiene varias subrutinas en FORTRAN, en las que se introducen las ecuacio-nes diferenciales del movimiento, ası como las condiciones iniciales tales como un punto de equilibrio,las condiciones de contorno, etc.
Fichero c.xxx, fichero de constantes, en el que se refleja la dimension del sistema, los parametrosa continuar, las tolerancias admisibles, el numero de iteraciones, etc.
En el fichero .f90, podemos distinguir dos subrutinas:
func es la encargada de pasar a AUTO las ecuaciones diferenciales y de definir las variables in-dependientes y los parametros.
stpnt es la subrrutina que AUTO emplea cuando se le indica que comience la continuacion apartir de una solucion inicial.
Como hemos dicho antes, ademas de las funciones func y stpnt, existen cuatro mas (bcnd, icnd,fopt y pvls) que se utilizan cuando se definen condiciones de contorno, condiciones de integracion,etc... y que, aunque no contengan nada, deben incluirse en este fichero.Este fichero, solo es necesario modificarlo si se quiere partir de otra solucion inicial, para lo cualtendrıamos que variar unicamente la funcion stpnt.
En cualquier otro caso, al permanecer las ecuaciones diferenciales inalterables, no serıa necesariasu modificacion.
Una vez visto un fichero tipo xxx.f90, como los del anexo A, explicaremos el otro fichero necesariopara trabajar con AUTO, el c.xxx.
Este fichero serıa el que proporcionarıa a AUTO las condiciones en las que debe realizar la conti-nuacion de las ecuaciones definidas en xxx.f90.
Vamos a explicar los parametros mas importantes de este fichero:
NDIM indica la dimension del sistema de ecuaciones. En los casos que nos ocupa tenemoscuatro ecuaciones diferenciales ordinarias de primer orden en un caso y seis en otro.

1.2. AUTO 7
Figura 1.2: Ejemplo de fichero c.xxx en AUTO7P.
IPS define el tipo de problema. Nosotros nos moveremos entre dos de sus valores:
• IPS=1. Soluciones estacionarias de ecuaciones diferenciales ordinarias con deteccion deHopf.
• IPS=2. Para continuacion de soluciones periodicas.
IRS define la etiqueta de la solucion donde la continuacion comenzara. Si su valor es cero, comoen este caso, el programa tomara como solucion inicial la indicada en la subrutina stpnt.
ILP puede tomar dos valores:
• ILP=0 no detecta los posibles pliegues (puntos LP) en la continuacion.
• ILP=1 detecta los pliegues. Es el valor recomendado.
NICP indica el numero de parametros que tiene nuestro sistema. En nuestro caso el numerode parametros sera diez mas el periodo. En realidad, el numero de parametros esta definido enel archivo xxx.f90 con un vector llamado PAR[ ], y en el NICP lo unico que indicaremos escuantos de ellos queremos que aparezcan por pantalla al ejecutar AUTO.
ICP depende del valor que hayamos asignado a NICP. Deberemos indicar que parametros seranlos que apareceran en la continuacion y segun el orden, cual sera el parametro de continuacionprincipal y cual el secundario. En nuestro caso la velocidad sera el parametro principal en lamayorıa de los calculos y el periodo el parametro secundario.
ISP es el parametro que controla la deteccion de puntos de bifuracion (BP), puntos de dupli-cacion de perıodo (PD), etc. En el presente proyecto se emplearan dos valores de esta variable:
• ISP=1 este valor detecta los puntos de bifurcacion de Hopf (HB) para soluciones que nosean periodicas, y no detecta puntos de duplicacion de perıodo (PD).
• ISP=2 este valor detecta todos los puntos especiales y es el que se empleara cuando seestudien las orbitas periodicas.
ISW indica el tipo de continuacion que se realizara. Aquı se emplearan tres valores:
• ISW=1 se utiliza para continuar equilibrios con un solo parametro y para trazar una orbitaperiodica a partir de un punto de Hopf.
• ISW=2 se utiliza para continuar puntos lımite (LP) y puntos de Hopf (HB), ya que alanadirse implıcitamente una ecuacion en estos puntos, se nos permite variar el segundoparametro.
• ISW=-1 se utiliza en orbitas periodicas para continuar puntos de bifurcacion y puntos debifurcacion de duplicacion de periodo.
NMX indica el numero maximo de iteraciones que le vamos a permitir a la continuacion.

8 CAPITULO 1. HERRAMIENTAS
BP (1) Punto de ramificacion (sistemas algebraicos)LP (2) Silla-nodo (sistemas algebraicos)HB (3) Bifurcacion de HopfUZ (4) Punto objetivo seleccionadoUZ (-4) Punto seleccionado con final de computacionLP (5) Silla-nodo (ecuaciones diferenciales)BP (6) Punto de ramificacion (ecuaciones diferenciales)PD (7) Bifurcacion con perıodo dobleTR (8) Bifurcacion a torosEP (9) Punto final, finalizacion normalMX (-9) Finalizacion anormal, no convergencia
Tabla 1.1: Tipos de soluciones y sus codigos de identificacion.
RL0, RL1 indican el valor mınimo y maximo, respectivamente, que puede tomar el parametrode continuacion principal.
NPR si su valor es inferior a NMX, entonces se mostraran por pantalla los resultados cada NPRiteraciones. Si su valor es igual a NMX, solo se mostraran por pantalla los puntos especialesencontrados (dichos puntos tambien apareceran en el caso anterior).
DS indica el tamano de paso normal entre dos puntos de la misma rama. Ademas, un cambiode signo provoca que la continuacion se realice en sentido contrario.
DSMIN, DSMAX indican en valor absoluto, los tamanos de paso mınimo y maximo admisi-bles entre dos puntos de una misma rama.
UZR permite seleccionar valores exactos de los parametros que varıan, recogiendo y mostrandosus soluciones en las diferentes salidas del programa.
UZSTOP indica el valor del parametro para el que el calculo debe pararse y finalizar.
Capıtulo 2
Estudio analıtico-numerico dedistintos modelos de flutter
2.1. Modelo clasico de flutter
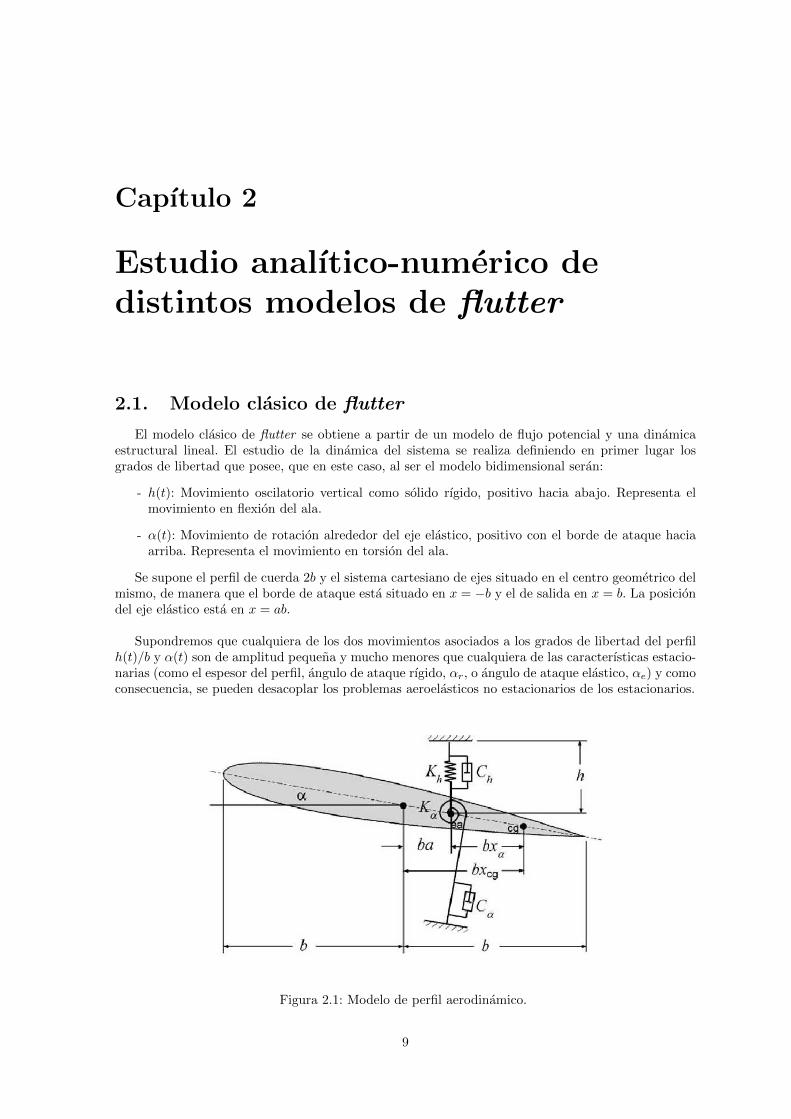
El modelo clasico de flutter se obtiene a partir de un modelo de flujo potencial y una dinamicaestructural lineal. El estudio de la dinamica del sistema se realiza definiendo en primer lugar losgrados de libertad que posee, que en este caso, al ser el modelo bidimensional seran:
- h(t): Movimiento oscilatorio vertical como solido rıgido, positivo hacia abajo. Representa elmovimiento en flexion del ala.
- α(t): Movimiento de rotacion alrededor del eje elastico, positivo con el borde de ataque haciaarriba. Representa el movimiento en torsion del ala.
Se supone el perfil de cuerda 2b y el sistema cartesiano de ejes situado en el centro geometrico delmismo, de manera que el borde de ataque esta situado en x = −b y el de salida en x = b. La posiciondel eje elastico esta en x = ab.
Supondremos que cualquiera de los dos movimientos asociados a los grados de libertad del perfilh(t)/b y α(t) son de amplitud pequena y mucho menores que cualquiera de las caracterısticas estacio-narias (como el espesor del perfil, angulo de ataque rıgido, αr, o angulo de ataque elastico, αe) y comoconsecuencia, se pueden desacoplar los problemas aeroelasticos no estacionarios de los estacionarios.
Figura 2.1: Modelo de perfil aerodinamico.
9

10 CAPITULO 2. ESTUDIO ANALITICO-NUMERICO
A continuacion vamos a obtener las ecuaciones del movimiento del sistema mediante la aplicacionde las ecuaciones de Lagrange, suponiendo que el sistema tiene una envergadura unidad [12].
2.1.1. Calculo de la energıa cinetica
Una vez definidos los grados de libertad del sistema se calcula la energıa cinetica acumulada en elsistema como consecuencia de las fuerzas de inercia. La energıa cinetica T de un elemento de masa,dm, situado sobre el perfil vale
dT =1
2[h(t) + (x− ab)α(t)]2dm.
Integrando dicha expresion entre el borde de ataque y el borde de salida del perfil obtenemos
T =1
2mh2 + Sαhα+
1
2Iαα
2,
donde m es la masa total del perfil, Iα el momento de inercia de la seccion respecto del eje elastico ySα = m(xcg − ab) el momento estatico de la seccion alrededor del eje elastico.
2.1.2. Calculo de la energıa potencial
Todo cuerpo elastico sometido a un sistema de fuerzas externas se deforma almacenando unaenergıa potencial denominada energıa de deformacion.
Si definimos kh y kα como las rigideces a flexion y torsion del ala respecto del eje elastico, respec-tivamente, entonces la energıa potencial o de deformacion elastica del sistema sera
V =1
2khh
2 +1
2kαα
2.
2.1.3. Calculo de la funcion de disipacion
El amortiguamiento estructural de un sistema se puede considerar una funcion de la amplitud dela oscilacion pero no de la frecuencia. Estas fuerzas de disipacion se pueden expresar a traves de lafuncion
D =1
2
mghω2h
ωh2 +
1
2
mgαω2α
ωα2,
donde gh y gα son los coeficientes de amortiguamiento adimensionales debidos a la flexion y torsion,respectivamente. Notese que esta expresion de la funcion de disipacion solo es valida para movimientosarmonicos. ωh y ωα son frecuencias caracterısticas del sistema de flexion y torsion respectivamente y ωes la frecuencia de oscilacion del movimiento armonico. En adelante se denotaran como ch = mghω
2h/ω
y cα = mgαω2α/ω.
2.1.4. Calculo de las ecuaciones del movimiento
Vamos a obtener las ecuaciones del movimiento a partir de las ecuaciones de Lagrange
d
dt
(∂L∂qi
)− ∂L∂qi
+∂D
∂qi= Qi,
donde L es la funcion lagrangiana del sistema que se calcula como L = T − V y qi es la coordenadageneralizada. Obtenemos el sistema de ecuaciones
mh+ Sαα+ chh+ khh = Qh,
Sαh+ Iαα+ cαα+ kαα = Qα,
(2.1)
donde Qh y Qα son las fuerzas aerodinamicas generalizadas originadas como consecuencia del movi-miento no estacionario del perfil.

2.1. MODELO CLASICO DE FLUTTER 11
En forma matricial las ecuaciones (2.1) se pueden expresar como[m SαSα Iα
] [hα
]+
[ch 00 cα
] [hα
]+
[kh 00 kα
] [hα
]=
[QhQα
]. (2.2)
El sistema de ecuaciones (2.2) modela, por tanto, el comportamiento dinamico de un problema deflutter clasico.
2.1.5. Fuerzas aerodinamicas
Las fuerzas aerodinamicas generalizadas dependen linealmente de las coordenadas generalizadasy de sus derivadas y pueden pasarse de un lado al otro de las ecuaciones, obteniendose un problemade vibraciones autoexcitadas. Estas fuerzas dependeran linealmente de h, α, h, α, h y α, ademas deotros parametros.
La interpretacion fısica de los distintos terminos en dichas fuerzas es la siguiente: los coeficientesde los terminos de las derivadas segundas de las coordenadas generalizadas corresponden a masasvirtuales debidas al efecto de aceleracion del fluido que habra que anadir a las de la seccion. Loscoeficientes de los terminos de las derivadas primeras corresponden a los coeficientes de amortigua-miento aerodinamico. A diferencia del caso estructural en que los coeficientes de amortiguamiento sonsiempre positivos, los aerodinamicos pueden ser positivos o negativos indicando que se esta extrayen-do o entregando energıa al sistema. Por ultimo, los coeficientes de los terminos de las coordenadasgeneralizadas corresponden a la rigidez aerodinamica.
El termino asociado a la rigidez aerodinamica no es de origen potencial. Dicho termino representauna fuerza no conservativa de tipo follower, es decir, que solo depende de la posicion pero que noderiva de una funcion potencial. Esto implica, entre otras cosas, que la matriz de rigidez generalizadano va a ser simetrica.
Normalmente los terminos de masas virtuales y de rigideces aerodinamicas son mucho menoresque los debidos a los estructurales, pero en cambio los de amortiguamiento estructural y aerodinamicoson del mismo orden.
2.1.6. Aproximacion de Theodorsen
T. Theodorsen (1897-1978), para calcular la expresion de las fuerzas aerodinamicas, hace unaaproximacion basada en tres hipotesis fundamentales [20]:
a) El flujo permanece adherido en todo momento, es decir, no existen zonas de flujo separado.
b) La estela tras el perfil es plana.
c) La vorticidad de la estela se propaga con una velocidad igual a la de la corriente libre.
Es necesario indicar tambien que la solucion de Theodorsen esta calculada para movimientosarmonicos del perfil. El problema que se trata aquı, como cualquier problema aerodinamico con flujoadherido, tiene que satisfacer las condiciones de contorno que, en este caso, son dos:
- Impermeabilidad: el flujo no puede penetrar en el perfil, lo que equivale a imponer que lavelocidad vertical a la superficie del perfil sea nula.
- Condicion de Kutta: el flujo debe separarse en el borde de salida del perfil. Es equivalente adecir que la velocidad en el borde de salida del perfil debe ser finita.
Ademas tambien tiene que satisfacer el teorema de Kelvin, esto es, en un flujo potencial, como esel caso supuesto por Theodorsen, la circulacion se conserva a lo largo de un camino cerrado.
En el desarrollo hecho por Theodorsen [20], se desprecian las fuerzas viscosas. Sin embargo, lapresencia de estas fuerzas es imprescindible desde el punto de vista fısico para el cumplimiento delas condiciones de contorno; esta aparente contradiccion es salvada mediante la introduccion de lahipotesis o condicion de Kutta.

12 CAPITULO 2. ESTUDIO ANALITICO-NUMERICO
El modelo se basa en la superposicion de soluciones elementales de la ecuacion de Laplace (∇2φ =0): flujo libre, fuentes y sumideros, remolinos o vortices y dobletes.
Mediante la superposicion adecuada de este tipo de soluciones se logra satisfacer las condicionesde contorno anteriormente descritas. El resultado mas importante de la aproximacion de Theodorsenes que proporciona la distribucion de vortices necesaria para satisfacer la condicion de Kutta.
Con todas estas suposiciones, se puede calcular la expresion de la sustentacion y el momentoaerodinamico como funciones lineales de las coordenadas generalizadas y sus derivadas [20]
L(t) = ρπb2(h− baα+ Uα
)+ 2πρUbC(k)
[Uα+ h+ b
(1
2− a)α
], (2.3)
que puede descomponerse en tres terminos,
L(t) = LG(t) + LMagnus(t) + Lc(t).
El primer termino, que tiene por expresion
LG(t) = ρπb2(h− baα
),
recoge el efecto de una masa aparente efectiva. Se corresponde con el efecto que el fluido ejerce sobreel perfil como reaccion a la aceleracion que el fluido experimenta por la aceleracion del perfil en sumovimiento.
El segundo termino esLMagnus(t) = ρπb2Uα.
Dicho termino representa la sustentacion debida al efecto Magnus. La rotacion del perfil, dada porα, genera una diferencia de presiones entre el intrados y el extrados, al frenarse el fluido que circulapor el primero y acelerarse el que circula por el segundo. Digamos que el perfil empuja al fluido en laparte del intrados acelerandolo y, consecuentemente, disminuyendo la presion y lo frena en la partedel extrados provocando el efecto contrario.
El ultimo termino,
Lc(t) = 2πρUbC(k)
[Uα+ h+ b
(1
2− a)α
]es la parte circulatoria de la sustentacion que se debe al efecto de la variacion de la intensidad de lostorbellinos de la estela en el movimiento del perfil y que, por tanto, no existe en regimen estacionario,donde solo se consideraba la existencia de un torbellino de arranque que generaba la estela y despuesesta permanecıa estacionaria.
Y faltarıa unicamente determinar el valor de C (k) que dependera de la frecuencia reducidak = ωb/U y se puede evaluar en terminos de las funciones de Bessel de primera y segunda espe-cie. Se puede descomponer en parte real e imaginaria C(k) = F (k) + iG(k). En la figura 2.2 serepresenta la funcion C(k).
La funcion de Theodorsen C(k) puede evaluarse en terminos de dichas funciones de Bessel como,
C(k) = F (k) + iG(k) =H
(2)1 (ik)
H(2)1 (ik) + iH
(2)0 (ik)
=K1 (ik)
K0 (ik) +K1 (ik), (2.4)
donde Kj(ik) son funciones de Bessel modificadas y H(2)n (k) son funciones de Hankel de segunda
especie.
Una aproximacion mucho mas practica es
C(k) = 1− 0.165
1− 0.0455k i
− 0.335
1− 0.3k i
, k ≤ 0.5, (2.5)

2.1. MODELO CLASICO DE FLUTTER 13
Figura 2.2: Funcion de Theodorsen.
C(k) = 1− 0.165
1− 0.041k i− 0.335
1− 0.32k i
, k > 0.5. (2.6)
La funcion C(k) se conoce como funcion de Theodorsen y puede verse dentro de la expresion de lasustentacion como un filtro analogico, ya que atenua la fuerza de sustentacion en una cantidad quedepende de la frecuencia de oscilacion. La funcion de Theodorsen solo es valida para el caso en quela respuesta del sistema sea exactamente sinusoidal.
En cuanto al momento de las fuerzas aerodinamicas en un punto x = a, su expresion viene dadapor
Ma(t) = ρπb2[bah− Ub
(1
2− a)α− b2
(1
8+ a2
)α
]+2πρb2U
(1
2− a)C (k)
[Uα+ h+ b
(a+
1
2
)α
], (2.7)
donde se recoge la contribucion de los diferentes terminos de la sustentacion ası como un momentode reaccion a las aceleraciones angulares. Para su calculo es necesario tener en cuenta que la partecirculatoria de la sustentacion, Lc(t), tiene su resultante aplicada en el centro aerodinamico, esto esx = b/2, la sustentacion debida a la masa aparente, LG(t), la tendra en el centro de gravedad, en estecaso x = b y la sustentacion causada por el efecto Magnus en x = 3b/2.

14 CAPITULO 2. ESTUDIO ANALITICO-NUMERICO
Aproximacion cuasiestacionaria
La frecuencia reducida, k = ωb/U , esta relacionada muy estrechamente con el caracter no estacio-nario del problema. Desde un punto de vista fısico k viene a ser equivalente a una especie de numerode Strouhal, St, es decir, es una ponderacion entre el tiempo de residencia de una partıcula fluida yel tiempo caracterıstico del problema no estacionario. Si es mucho menor que la unidad indica que elmovimiento de la partıcula es tan rapido que el movimiento armonico del perfil no llega a influirle,es decir, las partıculas no llegan a percatarse de los cambios en las condiciones de contorno con eltiempo y, por tanto, el problema puede ser considerado como cuasiestacionario.
Para obtener la expresion de la sustentacion en el caso cuasiestacionario vamos a comparar losordenes de magnitud de los distintos terminos de L(t) y simplificar ası su expresion.
En la aproximacion cuasiestacionaria, la funcion de Theodorsen se hace igual a la unidad, C(k) = 1,en las ecuaciones (2.3) y (2.7). Comparamos la sustentacion debida al efecto Magnus con la corres-pondiente al caso estacionario, resultando
ρπb2Uα
ρπbU2C(k)α∼ bω
U
α0
α0= k 1. (2.8)
En el caso de LG(t) al comparar los ordenes de magnitud se obtiene
ρπb2Uh
ρπbU2C(k)h∼ bω2
Uω
h0h0
= k 1 (2.9)
yρπb2Uα
ρπbU2C(k)α∼ b2ω2
U2
α0
α0= k2 1. (2.10)
Por tanto, la expresion de L(t) tras las simplificaciones realizadas queda
L(t) = 2πρUbC(k)
[Uα+ h+ b
(1
2− a)α
], (2.11)
y teniendo en cuenta que C(k) ≈ 1 en el caso cuasiestacionario, y que podemos definir
αeff = α+ h/U + b
(1
2− a)α/U,
la expresion final esLQS(t) = 2πρbU2αeff (t). (2.12)
Introduciendo estos resultados en el sistema de ecuaciones (2.2) resulta el siguiente modelo para elestudio del flutter clasico cuasiestacionario
M
[hα
]+D
[hα
]+K
[hα
]=
[00
], (2.13)
donde
M =
[m+ πρb2 Sα − aπρb3Sα − aπρb3 Iα + π (1/8 + a) ρb4
], (2.14)
D =
[ch + 2πρbU 2 (1− a)πρb2U
0 cα + a (2a− 1)πρb3U
], (2.15)
K =
[kh 2πρbU2
0 kα − 2π (1/2 + a) ρb2U2
]. (2.16)

2.1. MODELO CLASICO DE FLUTTER 15
Formulacion no estacionaria
Teniendo en cuenta los efectos de la no estacionariedad del flujo, las cargas aerodinamicas sepueden representar como
L = πρb2(h+ Uα− baα
)+ 2πρUb
∫ +∞
−∞C(k)f(ω)eiωtdω (2.17)
y
M = πρb2(bah− Ub (1/2− a) α− b2
(1/8 + a2
)α)
+2πρb2U (a+ 1/2)
∫ +∞
−∞C(k)f(ω)eiωtdω, (2.18)
donde
f(ω) =
∫ +∞
−∞Q(t)e−iωtdt.
Usando la funcion de Wagner
φ(t) =
∫ +∞
−∞
C(k)
ikeiktdk
y el teorema de la convolucion, se obtiene
Lc =
∫ +∞
−∞C(k)f(ω)eiωtdω = Q(0)φ(τ) +
∫ τ
0
∂Q(σ)
∂σφ (τ − σ) dσ, (2.19)
que, usando la integracion por partes, se puede reescribir como
Lc = Q(τ)φ(0) +
∫ τ
0
Q(σ)∂φ (τ − σ)
∂σdσ. (2.20)
La aproximacion de Sears para φ(τ) esta dada por
φ(τ) ≈ c0 − c1e−c2τ − c3e−c4τ , (2.21)
donde c0 = 1, c1 = 0.165, c2 = 0.0455, c3 = 0.335 y c4 = 0.3.
Usando las aproximaciones de Sears y Pade, Lc se puede expresar como
Lc = (c0 − c1 − c3)Q(t) + c2c4 (c1 + c3)
(U2
b
)x+ (c1c2 + c3c4)U ˙x, (2.22)
donde x y ˙x son dos variables ampliadas en el espacio de estados. Dichas variables estan relacionadascon las variables del sistema a traves de la siguiente ecuacion diferencial de segundo orden
¨x = −c2c4U2
b2x− (c2 + c4)
U
b˙x+
U
bα+
(1
2− a)α+
h
b. (2.23)
Mediante las ecuaciones (2.19) y (2.22), se pueden expresar la sustentacion y el momento como
L = πρb2(h+ Uα− baα
)+ 2πρUb (c0 − c1 − c3)Q
+2πρU3c2c4 (c1 + c3) x+ 2πρU2b (c1c2 + c3c4) ˙x (2.24)
y
Mα = πρb2(bah− Ub
(1
2− a)α− b2
(1
8+ a2
)α
)+ 2πρb2U
(a+
1
2
)(c0 − c1 − c3)Q
+2πρbU3
(a+
1
2
)c2c4 (c1 + c3) x+ 2πρb2U2
(a+
1
2
)(c1c2 + c3c4) ˙x. (2.25)
Se observa aquı que los dos primeros terminos de la parte derecha de las ecuaciones (2.24) y (2.25)son iguales que en la aproximacion cuasiestacionaria. Los terceros y cuartos terminos incluyen las

16 CAPITULO 2. ESTUDIO ANALITICO-NUMERICO
contribuciones de las variables aumentadas, que modelan los efectos no estacionarios.
Sustituyendo (2.24) y (2.25) en (2.2) y aumentando el sistema con la variable x, se obtiene lasiguiente forma general para las ecuaciones del movimiento
Mnsp+Dnsp+Knsp = 0, (2.26)
donde p = [h, α, x]T y Mns, Dns,Kns son las matrices generalizadas de masa, amortiguamiento yrigidez, respectivamente. La expresion de dichas matrices es
Mns =
mT + πρb2 Sα − aπρb3 0Sα − aπρb3 Iα + π (1/8 + a) ρb4 0
0 0 1
, (2.27)
Dns =
ch + 2πρbUφ
′(
1 + φ′(1− 2a)
)πρb2U 2πρU2bδ
′
−2π (a+ 1/2) ρb2φ′U cα + (1/2− a)
(1 + φ
′(1− 2a)
)πρb3U −2πρb2U2 (a+ 1/2) δ
′
−1/b a− 1/2 (c2 + c4)U/b
,
Kns =
kh 2πρbU2φ′
2πρU3τ′
0 kα − 2π (1/2 + a)φ′ρb2U2 −2πρbU3 (a+ 1/2) τ
′
0 −U/b c2c4U2/b2
, (2.28)
con φ′
= c0 − c1 − c3, δ′
= c1c2 + c3c4 y τ′
= c2c4 (c1 + c3).
Multiplicando (2.26) por la izquierda con la matriz inversa de Mns, M−1ns , resulta
p = D∗nsp+K∗nsp, (2.29)
donde D∗ns = −M−1ns Dns y K∗ns = −M−1ns Kns.
En el espacio de estados el sistema de ecuaciones puede expresarse como
Z = Fns(U)Z, (2.30)
siendo
Z =[h, α, x, h, α, ˙x
]T(2.31)
y Fns(U) la matriz de transferencia para el caso no estacionario. Resulta evidente que, en el caso noestacionario, el tamano de la matriz de transferencia aumenta, ya que las cargas aerodinamicas sonconsideradas con un grado de libertad adicional a traves del uso de las variables aumentadas (x y ˙x).
La matriz Fns(U) es de orden 6 × 6. Los cuatro primeros autovalores son complejos conjugados, loscuales estan directamente relacionados con los grados de libertad de flexion h y de torsion α. Losotros dos autovalores estan relacionados con la variable de estado aumentada x.
2.1.7. Limitaciones del modelo clasico de flutter
La solucion aportada por Theodorsen tiene una serie de limitaciones derivadas de las simplifica-ciones hechas para abordar el problema.
En primer lugar, los resultados que arroja tanto para la velocidad de flutter, Uf , como para la fre-cuencia, ωf , son validos unicamente para el caso en que la respuesta del sistema sea de tipo armonico.
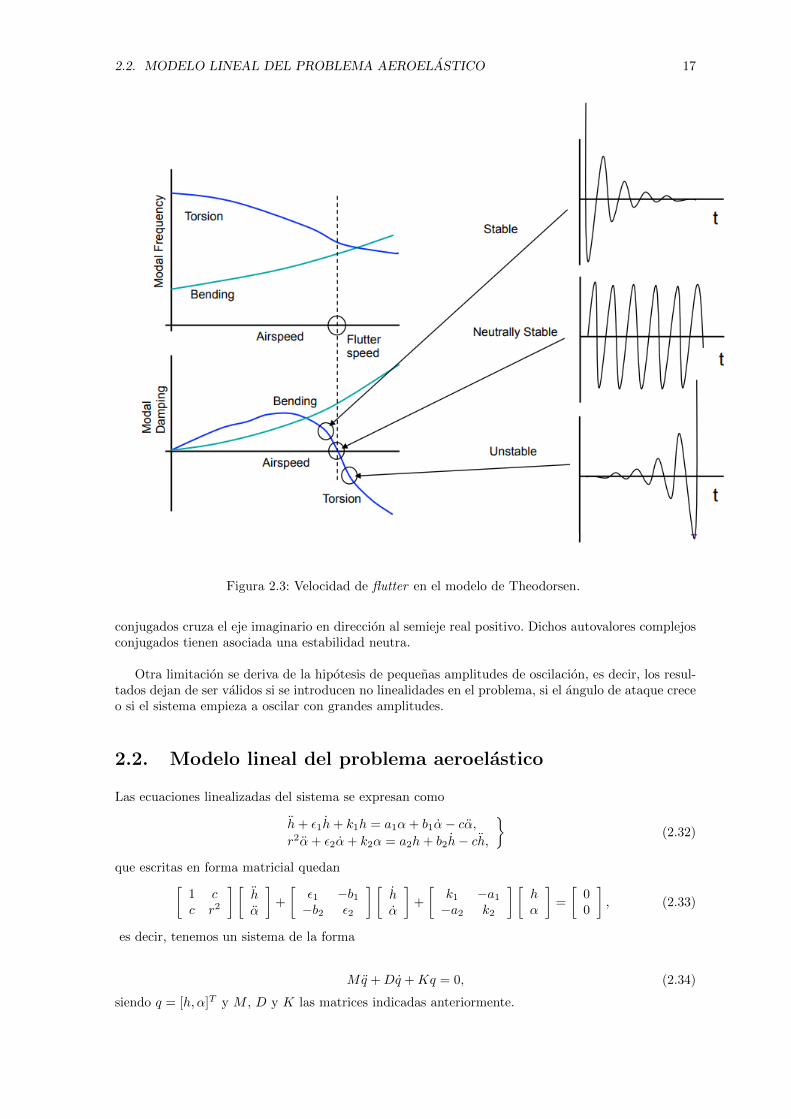
El flutter, segun este modelo, se produce cuando las frecuencias naturales de torsion y flexiontienden a converger en el mismo valor al aumentar la velocidad de la corriente incidente, tal comopuede verse en la figura 2.3 ([22]). Matematicamente se observa que un par de autovalores complejos
2.2. MODELO LINEAL DEL PROBLEMA AEROELASTICO 17
Figura 2.3: Velocidad de flutter en el modelo de Theodorsen.
conjugados cruza el eje imaginario en direccion al semieje real positivo. Dichos autovalores complejosconjugados tienen asociada una estabilidad neutra.
Otra limitacion se deriva de la hipotesis de pequenas amplitudes de oscilacion, es decir, los resul-tados dejan de ser validos si se introducen no linealidades en el problema, si el angulo de ataque creceo si el sistema empieza a oscilar con grandes amplitudes.
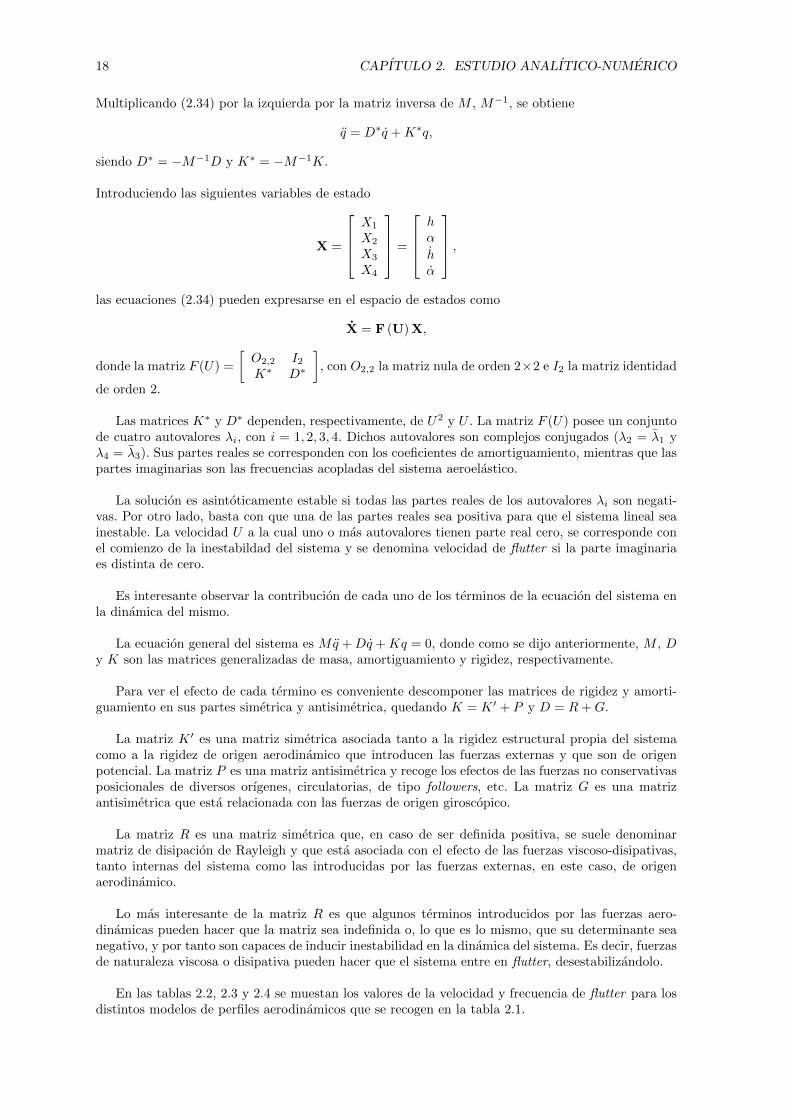
2.2. Modelo lineal del problema aeroelastico
Las ecuaciones linealizadas del sistema se expresan como
h+ ε1h+ k1h = a1α+ b1α− cα,r2α+ ε2α+ k2α = a2h+ b2h− ch,
(2.32)
que escritas en forma matricial quedan[1 cc r2
] [hα
]+
[ε1 −b1−b2 ε2
] [hα
]+
[k1 −a1−a2 k2
] [hα
]=
[00
], (2.33)
es decir, tenemos un sistema de la forma
Mq +Dq +Kq = 0, (2.34)
siendo q = [h, α]T y M , D y K las matrices indicadas anteriormente.
18 CAPITULO 2. ESTUDIO ANALITICO-NUMERICO
Multiplicando (2.34) por la izquierda por la matriz inversa de M , M−1, se obtiene
q = D∗q +K∗q,
siendo D∗ = −M−1D y K∗ = −M−1K.
Introduciendo las siguientes variables de estado
X =
X1
X2
X3
X4
=
hα
hα
,las ecuaciones (2.34) pueden expresarse en el espacio de estados como
X = F (U) X,
donde la matriz F (U) =
[O2,2 I2K∗ D∗
], con O2,2 la matriz nula de orden 2×2 e I2 la matriz identidad
de orden 2.
Las matrices K∗ y D∗ dependen, respectivamente, de U2 y U . La matriz F (U) posee un conjuntode cuatro autovalores λi, con i = 1, 2, 3, 4. Dichos autovalores son complejos conjugados (λ2 = λ1 yλ4 = λ3). Sus partes reales se corresponden con los coeficientes de amortiguamiento, mientras que laspartes imaginarias son las frecuencias acopladas del sistema aeroelastico.
La solucion es asintoticamente estable si todas las partes reales de los autovalores λi son negati-vas. Por otro lado, basta con que una de las partes reales sea positiva para que el sistema lineal seainestable. La velocidad U a la cual uno o mas autovalores tienen parte real cero, se corresponde conel comienzo de la inestabildad del sistema y se denomina velocidad de flutter si la parte imaginariaes distinta de cero.
Es interesante observar la contribucion de cada uno de los terminos de la ecuacion del sistema enla dinamica del mismo.
La ecuacion general del sistema es Mq +Dq +Kq = 0, donde como se dijo anteriormente, M , Dy K son las matrices generalizadas de masa, amortiguamiento y rigidez, respectivamente.
Para ver el efecto de cada termino es conveniente descomponer las matrices de rigidez y amorti-guamiento en sus partes simetrica y antisimetrica, quedando K = K ′ + P y D = R+G.
La matriz K ′ es una matriz simetrica asociada tanto a la rigidez estructural propia del sistemacomo a la rigidez de origen aerodinamico que introducen las fuerzas externas y que son de origenpotencial. La matriz P es una matriz antisimetrica y recoge los efectos de las fuerzas no conservativasposicionales de diversos orıgenes, circulatorias, de tipo followers, etc. La matriz G es una matrizantisimetrica que esta relacionada con las fuerzas de origen giroscopico.
La matriz R es una matriz simetrica que, en caso de ser definida positiva, se suele denominarmatriz de disipacion de Rayleigh y que esta asociada con el efecto de las fuerzas viscoso-disipativas,tanto internas del sistema como las introducidas por las fuerzas externas, en este caso, de origenaerodinamico.
Lo mas interesante de la matriz R es que algunos terminos introducidos por las fuerzas aero-dinamicas pueden hacer que la matriz sea indefinida o, lo que es lo mismo, que su determinante seanegativo, y por tanto son capaces de inducir inestabilidad en la dinamica del sistema. Es decir, fuerzasde naturaleza viscosa o disipativa pueden hacer que el sistema entre en flutter, desestabilizandolo.
En las tablas 2.2, 2.3 y 2.4 se muestan los valores de la velocidad y frecuencia de flutter para losdistintos modelos de perfiles aerodinamicos que se recogen en la tabla 2.1.

2.2. MODELO LINEAL DEL PROBLEMA AEROELASTICO 19
Parametro Valores [2] Valores [1] Valores [14]b (m) 0.0325 0.135 0.3a (-) -0.5 -0.66 -0.5ρ (kg/m3) 1.204 1.204 1.204mw (kg) 1.0662 2.049 26.268mT (kg) 3.836 12.3870 31.578Iα (kg.m2) 0.0004438 0.055775 0.079cα (kg.m2/s) 0.0115 0.036 0.0687ch (kg/s) 0.011 27.43 45.764kα (Nm) 0.942 6.833 6.646 103
kh (N/m) 895.10 2844.4 1.078 106
xα (-) 0.5 0.331 0.25Clα (-) 2π 2π 2πCmα (-) 2π(a+ 1/2) 2π(a+ 1/2) 2π(a+ 1/2)
Tabla 2.1: Parametros fısicos del modelo aeroelastico.
Aproximacion cuasiestacionaria Formulacion no estacionariaωf (rad/s) 17.5083 16.2457Uf (m/s) 14.3547 10.9025
Tabla 2.2: Velocidad y frecuencia de flutter caso [2].
En las figuras 2.4, 2.5 y 2.6 se muestra la evolucion de los grados de libertad α y h con el tiempopara los casos en que la velocidad del flujo sea inferior, igual o superior respectivamente, a la velocidada la cual se produce el flutter Uf .
En las siguientes secciones se va estudiar el sistema de ecuaciones diferenciales (2.33) para diversoscasos particulares y se intentara discernir la influencia de cada termino en la aparicion del flutter.
2.2.1. Solo actuan fuerzas posicionales
En este caso ε1 = ε2 = 0 y B = b = 0 por tanto las ecuaciones del movimiento quedan[1 cc r2
][hα
]+
([k1 −(a1 + a2)/2
−(a1 + a2)/2 k2
]+
[0 −(a1 − a2)/2
(a1 − a2)/2 0
])[hα
]=
[00
].
Por conveniencia con el desarrollo, la matriz de rigidez se ha dividido en parte simetrica y an-tisimetrica. Llamando P = (a1 − a2)/2 y k = −(a1 + a2)/2 las ecuaciones del movimiento puedenexpresarse como
[1 cc r2
] [hα
]+
([k1 kk k2
]+
[0 −PP 0
])[hα
]=
[00
], (2.35)
donde la parte simetrica de la matriz representa las fuerzas de rigidez que actuan sobre el sistema yque, por tanto, son potenciales y de origen conservativo, mientras que la parte antisimetrica represen-ta las fuerzas posicionales de origen no conservativo que, alcanzados unos determinados valores delparametro P , seran las responsables de que el sistema se vuelva inestable, esto es, se produzca el flutter.
Las soluciones del sistema (2.35) seran del tipo eλt~v e introduciendolas en (2.35) el, la ecuacioncaracterıstica resultante es(
r2 − c2)λ4 +
(r2k1 + k2 − 2kc
)λ2 +
(k1k2 − k2 + P 2
)= 0.
Se trata de una ecuacion bicuadrada, cuya solucion se obtiene mediante el cambio de variableλ2 = s, resultando una ecuacion de segundo grado en s, de solucion
s =−(r2k1 + k2 − 2kc
)±√
(r2k1 + k2 − 2kc)2 − 4 (r2 − c2) (k1k2 − k2 + P 2)
2 (r2 − c2).

20 CAPITULO 2. ESTUDIO ANALITICO-NUMERICO
t (s)0 1 2 3 4
-0.02
-0.01
0
0.01
0.02h(t)
t (s)0 1 2 3 4
-0.1
0
0.1
0.2α(t)
t (s)0 1 2 3 4
-0.4
-0.2
0
0.2
0.4dh(t)/dt
t (s)0 1 2 3 4
-2
0
2
4dα(t)/dt
Figura 2.4: Caso general para U < Uf .
Aproximacion cuasiestacionaria Formulacion no estacionariaωf (rad/s) 14.8887 13.9812Uf (m/s) 9.2316 12.1193
Tabla 2.3: Velocidad y frecuencia de flutter caso [1].
Si se fijan los valores de r, c, k1, k2, k (inercias y rigideces simetricas) y se mueve el parametro P ,se aprecia como para un determinado valor de P , el sistema se vuelve inestable, es decir, se produceel fenomeno del flutter.
En la figura 2.7 se muestra la evolucion de los autovalores del sistema con el parametro P . Paravalores pequenos de P los autovalores solucion de la ecuacion caracterıstica son imaginarios puros, esdecir, con parte real cero, o lo que es lo mismo, dan lugar a centros en el plano de fases (se representanen color rojo). El flutter ocurre cuando al aumentar el parametro P , los cuatro autovalores, dos pare-jas conjugadas situadas inicialmente sobre el eje imaginario, confluyen dos a dos. Los autovalores deconfluencia crıticos se representan en verde. Si se sigue aumentando el valor de P estos se desdoblanpor parejas conjugadas, una de ellas evoluciona en la direccion del semieje real negativo y la otra enla direccion del semieje real positivo, representadas en color azul.
El movimiento de esta ultima pareja de autovalores es el responsable de que se produzca lainestabilidad. El valor de P para el cual los autovalores confluyen dos a dos en el eje imaginariodeterminara la velocidad a la cual se produce el flutter.
2.2.2. Solo actuan fuerzas dependientes de la velocidad
En este caso solo actuan fuerzas que dependen de la velocidad, sin haber fuerzas externas depen-dientes de la posicion. Esto es equivalente a imponer en el sistema general a = A = 0. De manerasimilar al caso anterior, se divide esta vez la matriz de fuerzas viscosas en sus partes simetrica yantisimetrica resultando el sistema

2.2. MODELO LINEAL DEL PROBLEMA AEROELASTICO 21
t (s)0 1 2 3 4
-0.02
-0.01
0
0.01
0.02h(t)
t (s)0 1 2 3 4
-0.2
-0.1
0
0.1
0.2α(t)
t (s)0 1 2 3 4
-0.4
-0.2
0
0.2
0.4dh(t)/dt
t (s)0 1 2 3 4
-4
-2
0
2
4dα(t)/dt
Figura 2.5: Caso general para U = Uf .
Aproximacion cuasiestacionaria Formulacion no estacionariaωf (rad/s) 2.2281 2.1311Uf (m/s) 177.5415 178.9360
Tabla 2.4: Velocidad y frecuencia de flutter caso [14].
[1 cc r2
] [hα
]+
([ε1 εε ε2
]+
[0 −ΩΩ 0
])[hα
]+
[k1 00 k2
] [hα
]=
[00
],
donde ε = −(b1 + b2)/2 y Ω = (b1 − b2)/2.
La parte simetrica de la matriz de viscosidad representa las fuerzas de disipacion viscosas y laparte antisimetrica las fuerzas de origen giroscopico. La matriz de disipacion, cuando es definida po-sitiva, se denomina clasicamente matriz de disipacion de Rayleigh.
Con el fin de ilustrar como se produce la inestabilidad por la presencia de este tipo de fuerzas, sevan a considerar exclusivamente las fuerzas de origen giroscopico, es decir, ε1 = ε2 = 0, ε = 0 y, porsimplificar los calculos, sin perdida de generalidad, se considerara que la matriz de masa es diagonaly, por tanto, c = 0. Tras las simplificaciones y consideraciones descritas el sistema de ecuaciones demovimiento queda:[
1 00 r2
] [hα
]+
[0 −ΩΩ 0
] [hα
]+
[k1 00 k2
] [hα
]=
[00
].
Ensayando soluciones de tipo exponencial, eλt~v, obtenemos el polinomio caracterıstico que permiteel calculo de los autovalores
r2λ4 +(r2k1 + k2 + Ω2
)λ2 + k1k2 = 0, (2.36)

22 CAPITULO 2. ESTUDIO ANALITICO-NUMERICO
t (s)0 1 2 3 4
-0.2
-0.1
0
0.1
0.2h(t)
t (s)0 1 2 3 4
-1
-0.5
0
0.5
1α(t)
t (s)0 1 2 3 4
-4
-2
0
2
4dh(t)/dt
t (s)0 1 2 3 4
-20
-10
0
10
20dα(t)/dt
Figura 2.6: Caso general para U > Uf .
que, como puede verse de nuevo, se trata de una ecuacion bicuadrada, resoluble analıticamente sinmas que realizar el oportuno cambio de variable (s = λ2)
s =−(r2k1 + k2 + Ω2
)±√
(r2k1 + k2 + Ω2)2 − 4r2k1k2
2r2.
En este caso el parametro a mover es Ω. Se observa como, partiendo de Ω = 0 y con rigideces negati-vas (k1 < 0, k2 < 0), el sistema se encuentra en una situacion fuertemente inestable y, a medida queaumenta el valor de Ω, se produce la estabilizacion del sistema.
En efecto, con Ω = 0 los cuatro autovalores solucion de la ecuacion caracterıstica (2.36) son reales,dos de ellos situados en el semieje real positivo y los otros dos en el negativo, el sistema es muy inesta-ble. Para un determinado valor de Ω los autovares son dos pares complejos conjugados. A medida queaumenta Ω, los autovalores, que son un par de complejos conjugados, se aproximan al eje imaginarioy para un determinado valor del parametro confluyen dos a dos en dicho eje. Si sigue aumentandoel valor de Ω estos se desdoblan como pares conjugados en el eje imaginario, es decir, como centrosde estabilidad. En la figura 2.8 se observa la evolucion de los autovalores al aumentar el valor delparametro Ω.
Por tanto, bajo estas condiciones el efecto de las fuerzas giroscopicas es estabilizar el sistema. Seobserva que el proceso es el inverso al caso en el que actuan unicamente fuerzas posicionales.
2.2.3. Modelo con “flutter puro”. Resonancia 1:1
Se trata de un modelo sencillo en el que no se incluyen fuerzas de disipacion. Las fuerzas externasque se incluyen son de naturaleza aerodinamica, estacionarias y dependen linealmente de la posicion,mas concretamente del angulo del ataque. Por simplicidad, y sin perdida de generalidad, los coefi-cientes se han escalado a la unidad.

2.2. MODELO LINEAL DEL PROBLEMA AEROELASTICO 23
Re(λk)
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
Im(λ
k)
-20
-15
-10
-5
0
5
10
15
20
Figura 2.7: Evolucion autovalores caso posicional.
En dicho modelo, el flutter se produce por la coalescencia de las frecuencias naturales de flexiony torsion, es decir, se tiene una situacion de resonancia 1:1 (igualdad de frecuencias naturales devibracion en un sistema autoexcitado).
Como se indico anteriormente, para analizar el efecto de las frecuencias naturales del sistema selo va a considerar con tan solo dos grados de libertad, flexion y torsion, y las fuerzas aerodinamicasestacionarias (considerando solo el efecto del angulo de ataque α).
Ası, el sistema de ecuaciones diferenciales del movimiento es
h+ ω21h = α,
α+ ω22α = 0.
(2.37)
Si tomamos la solucion trivial de la segunda ecuacion del sistema (2.37), obtenemos
α(t) = 0 → h(t) = A sin (ω1t) +B cos (ω1t) .
En este caso el sistema oscila en flexion (coordenada h) de manera estable e indefinida alrededorde la posicion de equilibrio, mientras que no existe movimiento en torsion (coordenada α).
Resolviendo la segunda ecuacion obtenemos el valor de α(t) en el caso no trivial,
α(t) = C sin (ω2t) +D cos (ω2t) .
Al ser una ecuacion de coeficientes constantes se puede dividir la solucion en parte homogenea,hh(t), y particular de la completa, hp(t).
La solucion general de la ecuacion homogenea asociada sera hh(t) = E sin (ω1t) + F cos (ω1t).
Para calcular una solucion particular de la ecuacion completa (2.37) hay que distinguir dos casos:sin resonancia (ω1 6= ω2) y con resonancia (ω1 = ω2).
En el primer caso el valor de hp(t) se calcula por el metodo de los coeficientes indeterminadosobteniendose
hp(t) =1
ω22 − ω2
1
[G sin (ω2t) +H cos (ω2t)] .

24 CAPITULO 2. ESTUDIO ANALITICO-NUMERICO
Re(λk)
-200 -150 -100 -50 0 50 100 150 200
Im(λ
k)
-250
-200
-150
-100
-50
0
50
100
150
200
250
Ω
Figura 2.8: Evolucion autovalores caso giroscopico.
Con lo cual, debido a la linealidad del problema, la solucion sera h(t) = hh(t) + hp(t), que con lospertinentes calculos puede expresarse como
h(t) = A1 cos (ω1t− θ1) +1
ω22 − ω2
1
B1 cos (ω2t− θ2) ,
que es la suma de dos oscilaciones periodicas: una con frecuencia natural ω1 y la otra con ω2. Engeneral dicha solucion no es periodica, lo sera en el caso en que el cociente de frecuencias naturalessea un numero racional.
En el punto en que coincidan las frecuencias naturales de flexion y torsion (ω1 = ω2 = ωn), y portanto se produzca el acoplamiento, se resuelve el sistema con los siguientes resultados. La solucion notrivial de la ecuacion nos da:
α(t) = C sin (ωnt) +D cos (ωnt) → h(t) = Et sin (ωnt) + Ft cos (ωnt) .
El resultado indica que mientras el sistema oscila de forma estable alrededor del equilibrio en lacoordenada α, en la coordenada h el factor t desestabiliza el sistema. Dicho factor modela la adicionde energıa al sistema debida al acoplamiento de frecuencias.
En efecto, el flutter se producira cuando las frecuencias de naturales de flexion y torsion tienden almismo valor y el sistema empieza a absorber energıa del exterior sin que haya ninguna fuerza externaactuante.
Veamos la evolucion de los autovalores durante el proceso de desestabilizacion del sistema. Elmodelo puede expresarse en forma matricial como[
1 00 1
] [hα
]+
[ω21 −1
0 ω22
] [hα
]=
[00
].
Ensayando soluciones de tipo exponencial, eλt~v, obtenemos el polinomio caracterıstico que permiteel calculo de los autovalores. (
λ2 + ω21
) (λ2 + ω2
2
)= 0,
cuya solucion son autovalores imaginarios puros λ = ±iω1,±iω2.

2.2. MODELO LINEAL DEL PROBLEMA AEROELASTICO 25
A medida que se introduce energıa en el sistema, dicho de otro modo, aumenta la velocidad, am-bas frecuencias ω1 y ω2 se aproximan, y coinciden en el punto en que la velocidad U = Uf . Paravelocidades U > Uf los centros se desdoblan en pares de complejos conjugados, un par evolucionahacia el semiespacio positivo y el otro hacia el semiespacio negativo. El sistema evoluciona por tantohacia la inestabilidad, se produce el flutter.
Cuando se incluyen completamente los efectos no estacionarios en las fuerzas aerodinamicas seobserva que ambas frecuencias no se unen exactamente sino que tienden a un valor asintotico comun,pero una por arriba y otra por abajo de la asıntota.
2.2.4. Modelo giroscopico puro
Este modelo nos da resultados analogos al anterior, lo que cambia es el modo en que se producela inestabilidad del flutter y las fuerzas responsables de este. Las fuerzas aerodinamicas se modelancomo una funcion lineal con la velocidad en la coordenada α (a torsion).
En este caso, las ecuaciones que modelan el comportamiento del sistema dinamico son
h+ ω2h = α,α+ ω2α = 0.
Como se dijo anteriormente se observa como la solucion analıtica del sistema es, mutatis mutandis,la misma que en el caso anterior. La diferencia radica en las fuerzas responsables de la inestabilizaciondel sistema que son de origen giroscopico. Se considera por tanto que el termino predominante en lasustentacion es el debido al efecto Magnus, despreciandose el resto de terminos.

26 CAPITULO 2. ESTUDIO ANALITICO-NUMERICO

Capıtulo 3
Analisis de la estabilidad delsistema
3.1. Taxonomıa de bifurcaciones en sistemas continuos
La codimension de una bifurcacion se define como el numero de parametros que han de variarpara que ocurra dicha bifurcacion, o dicho mas formalmente, el tamano, n, del espacio Rn al quepertenece el vector de parametros que entran en juego en una bifurcacion.
3.1.1. Bifurcaciones de Codimension 1
Las bifurcaciones mas sencillas son las que dependen de un solo parametro. Existen varios tiposde bifurcaciones de codimension 1 que se describen a continuacion.
Con un autovalor λ = 0
Se incluyen aquı los casos en que la ecuacion que caracteriza el sistema dinamico tiene un puntosingular para el cual la matriz de la linealizacion tiene un autovalor nulo. Hay tres tipos de bifurca-ciones de codimension 1 que se caracterizan por este hecho, la bifurcacion silla-nodo, la bifurcaciontranscrıtica y la bifurcacion pitchfork.
1. Bifurcacion silla-nodo
Es el tipo de bifurcacion que se presenta cuando, al cruzar el parametro un determinado valor,aparecen dos nuevos puntos singulares. Esta representada por la ecuacion diferencial x = µ − x2 ycomo se ha dicho, origina la desaparicion o aparicion simultanea de dos nuevos puntos singularesal cruzar el parametro un determinado valor (cero, en la forma normal). En el caso de la ecuaciondiferencial anterior, no existen puntos singulares si µ < 0, uno si µ = 0 y dos si µ > 0.
2. Bifurcacion transcrıtica
Este tipo de bifurcacion solo se da cuando el sistema tiene un punto singular que existe para todoslos valores del parametro y que nunca puede ser destruido. Cuando este punto singular colisionacon otro tambien singular, ambos puntos intercambian sus estabilidades respectivas, y continuanexistiendo ambos despues de la bifurcacion. La ecuacion diferencial es, en este caso, x = µx − x2 yrepresenta el cambio de estabilidad del punto singular cuando el parametro pasa por un determinadovalor.
3. Bifurcacion pitchfork o tridente
Este tipo de bifurcacion de codimension 1, solo existe cuando hay simetrıa respecto a la variablex, o sea, sustituyendo x por −x, se obtiene la misma ecuacion. Ahora la ecuacion diferencial esx = µx ± x3 y representa el cambio de estabilidad del punto singular junto con la aparicion de dosnuevos puntos singulares. Cuando el termino cubico es −x3, decimos que es una bifurcacion tridente
27

28 CAPITULO 3. ANALISIS DE LA ESTABILIDAD DEL SISTEMA
Figura 3.1: Bifurcacion silla-nodo. a) x = µ− x2, b) x = µ+ x2.
supercrıtica, mientras que cuando es +x3, decimos que es subcrıtica.
Con un par de autovalores λ = ±ωi
Se incluyen aquı el caso en que la ecuacion que caracteriza el sistema dinamico tiene un punto singularpara el cual la matriz de la linealizacion posee un par de autovalores complejos conjugados sobre eleje imaginario.
1. Bifurcacion de Hopf
Esta bifurcacion, tambien llamada bifurcacion de Poincare-Andronov-Hopf, solo puede aparecercuando la dimension del sistema es al menos dos. En este tipo de bifurcacion un punto singular esta-ble cambia su estabilidad y aparece un ciclo lımite (LCO) estable rodeando el punto singular (casosupercrıtico). Esta en el origen de la aparicion de comportamientos periodicos en los sistemas.
Aparece cuando en un sistema de la forma x = f(x, µ), con x ∈ Rn y µ ∈ R, para un valor delparametro µ0 y un punto x0(µ0), la matriz jacobiana Dfµ0
posee un par (simple) de autovaloresimaginarios puros, ±ωi, y no tiene otros autovalores con parte real nula.
Puede estudiarse a traves del sistema(x1x2
)=
(µ −ωω µ
)(x1x2
)+(x21 + x22
)( αx1αx2
), (3.1)
que transformandolo a coordenadas polares mediante el cambio de variables x1 = ρcosθ, x2 = ρsinθ,se convierte en
ρ = µρ+ αρ3,
θ = ω,(3.2)
donde α 6= 0, ρ es la amplitud y θ es la frecuencia de la oscilacion periodica.
Es claro que el origen es el unico equilibrio para todo valor de µ, siendo del tipo foco, hiperbolico,estable si µ < 0 e inestable para µ > 0. Para el caso α < 0, cuando µ = 0, el equilibrio en el origenpierde su estabilidad. Para µ > 0 existe una orbita periodica estable (ciclo lımite estable) de amplitud
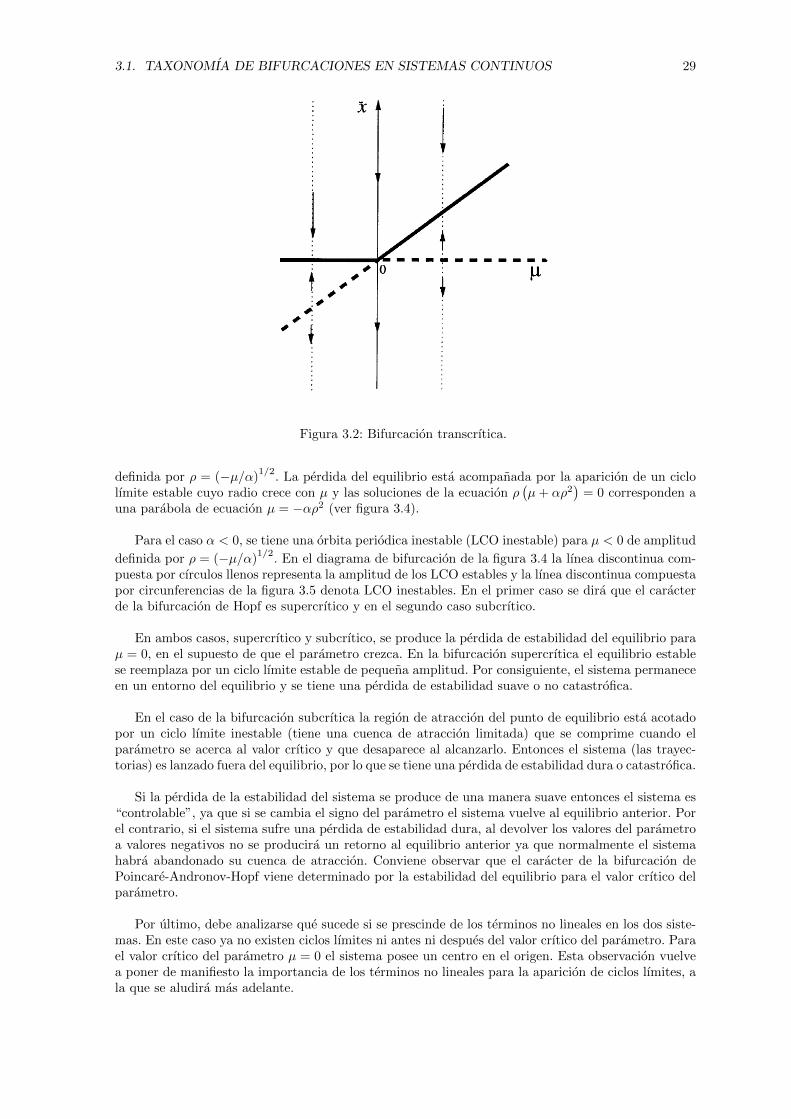
3.1. TAXONOMIA DE BIFURCACIONES EN SISTEMAS CONTINUOS 29
Figura 3.2: Bifurcacion transcrıtica.
definida por ρ = (−µ/α)1/2
. La perdida del equilibrio esta acompanada por la aparicion de un ciclolımite estable cuyo radio crece con µ y las soluciones de la ecuacion ρ
(µ+ αρ2
)= 0 corresponden a
una parabola de ecuacion µ = −αρ2 (ver figura 3.4).
Para el caso α < 0, se tiene una orbita periodica inestable (LCO inestable) para µ < 0 de amplitud
definida por ρ = (−µ/α)1/2
. En el diagrama de bifurcacion de la figura 3.4 la lınea discontinua com-puesta por cırculos llenos representa la amplitud de los LCO estables y la lınea discontinua compuestapor circunferencias de la figura 3.5 denota LCO inestables. En el primer caso se dira que el caracterde la bifurcacion de Hopf es supercrıtico y en el segundo caso subcrıtico.
En ambos casos, supercrıtico y subcrıtico, se produce la perdida de estabilidad del equilibrio paraµ = 0, en el supuesto de que el parametro crezca. En la bifurcacion supercrıtica el equilibrio establese reemplaza por un ciclo lımite estable de pequena amplitud. Por consiguiente, el sistema permaneceen un entorno del equilibrio y se tiene una perdida de estabilidad suave o no catastrofica.
En el caso de la bifurcacion subcrıtica la region de atraccion del punto de equilibrio esta acotadopor un ciclo lımite inestable (tiene una cuenca de atraccion limitada) que se comprime cuando elparametro se acerca al valor crıtico y que desaparece al alcanzarlo. Entonces el sistema (las trayec-torias) es lanzado fuera del equilibrio, por lo que se tiene una perdida de estabilidad dura o catastrofica.
Si la perdida de la estabilidad del sistema se produce de una manera suave entonces el sistema es“controlable”, ya que si se cambia el signo del parametro el sistema vuelve al equilibrio anterior. Porel contrario, si el sistema sufre una perdida de estabilidad dura, al devolver los valores del parametroa valores negativos no se producira un retorno al equilibrio anterior ya que normalmente el sistemahabra abandonado su cuenca de atraccion. Conviene observar que el caracter de la bifurcacion dePoincare-Andronov-Hopf viene determinado por la estabilidad del equilibrio para el valor crıtico delparametro.
Por ultimo, debe analizarse que sucede si se prescinde de los terminos no lineales en los dos siste-mas. En este caso ya no existen ciclos lımites ni antes ni despues del valor crıtico del parametro. Parael valor crıtico del parametro µ = 0 el sistema posee un centro en el origen. Esta observacion vuelvea poner de manifiesto la importancia de los terminos no lineales para la aparicion de ciclos lımites, ala que se aludira mas adelante.

30 CAPITULO 3. ANALISIS DE LA ESTABILIDAD DEL SISTEMA
Figura 3.3: Bifurcacion tridente. a) Caso supercrıtico, b) Caso subcrıtico.
Figura 3.4: Bifurcacion de Hopf supercrıtica.
3.1.2. Bifurcaciones de Codimension n ≥ 2
Se considera un sistema biparametrico
x = f (x, µ) , (3.3)
con x ∈ Rn, µ = (µ1, µ2)T ∈ R2 y f diferenciable.
Supongamos que en µ = µ0, el sistema tiene un punto singular en x = x0 para el que se cumplenlas condiciones de existencia de una bifurcacion silla-nodo, transcrıtica, pitchfork o bien de Hopf.Entonces existe una curva de bifurcacion B en el plano (µ1, µ2) a lo largo de la cual el sistema tieneun equilibrio del mismo tipo.
Entonces, si los parametros (µ1, µ2) se hacen variar simultaneamente con la intencion de trazarla curva de bifurcacion B, y se observa lo que sucede con el punto singular, puede ocurrir que paraalgunos valores de los parametros:
- otros autovalores se aproximen al eje imaginario,

3.1. TAXONOMIA DE BIFURCACIONES EN SISTEMAS CONTINUOS 31
Figura 3.5: Bifurcacion de Hopf subcrıtica.
Figura 3.6: Singularidades en bifurcaciones de codimension 2.
- puedan incumplirse algunas de las condiciones genericas para la existencia de una bifurcacionde codimension 1.
Sigamos en primer lugar una curva de bifurcacion de sillas-nodo. Un punto de esta curva defineun equilibrio con un autovalor simple λ1 = 0 y no hay mas autovalores sobre el eje imaginario.
Mientras se calcula la curva, se pueden dar, entre otras, las siguientes singularidades:
- Otro autovalor real λ2 se aproxima al eje imaginario, λ1,2 = 0 (ver figura 3.6 (a)). Estas son lascondiciones para la bifurcacion de Takens-Bogdanov o tambien doble cero.
- Otros dos autovalores complejos λ2,3 se acercan al eje imaginario, λ1 = 0 y λ2,3 = ±iω0
con ω0 > 0 (ver figura 3.6 (b)). Estas condiciones corresponden a la bifurcacion de Gavrilov-Guckenheimer o silla-nodo-Hopf (fold-Hopf ).
Sigamos ahora una curva de bifurcaciones de Hopf del sistema. En un punto cualquiera de esta curva,el sistema tiene un equilibrio con solo un par de autovalores imaginarios puros λ1,2 = ±iω0, ω0 > 0,y no hay mas autovalores con parte real nula.
Mientras nos movemos por la curva de puntos de Hopf, nos podemos encontrar con que otros dosautovalores complejos conjugados λ3,4 se aproximan al eje imaginario (ver figura 3.6 (c))
λ1,2 = ±iω0, λ3,4 = ±iω1.

32 CAPITULO 3. ANALISIS DE LA ESTABILIDAD DEL SISTEMA
Estas condiciones definen a la bifurcacion de tipo doble-Hopf o Hopf-Hopf.
Claramente, la bifurcacion de Takens-Bogdanov puede localizarse a lo largo de la curva de Hopf,cuando ω0 se aproxima a cero. En este punto, dos autovalores imaginarios puros se fusionan y se tieneun autovalor nulo doble. Analogamente ocurre para la bifurcacion de fold-Hopf.
3.2. Modelos no lineales de flutter
El sistema aeroelastico es modelado como un perfil aerodinamico con dos grados de libertad. Tie-ne permitido el giro alrededor del eje elastico en orden a imitar el movimiento de torsion del ala.Tambien se permite el movimiento vertical que modela el efecto de la flexion. Como se ha estudiadoen las secciones previas (2.1, 2.2), tradicionalmente, esta aproximacion se ha usado para estudiar elflutter clasico, un fenomeno que es esencialmente lineal, y que incluye el acoplamiento entre los dosgrados de libertad.
Se pretende en este punto anadir al modelo clasico terminos no lineales. En este caso se van aincluir no linealidades aerodinamicas producidas por el efecto de la entrada en perdida y geometricasincluidas en la rigidez.
3.2.1. Modelo con efecto de perdida
Las ecuaciones no lineales del movimiento para el sistema aeroelastico se escriben como [13]
mT h+mwbxα cos(α)α−mwbxα sin(α)α2 + chh+ kh(h)h = −L,(Icg +mwb
2x2α)α+mwbxα cos(α)h+ cαα+ kα(α)α = M.
(3.4)
Las fuerzas aerodinamicas, L y M , incluyen no linealidades procedentes de la entrada en perdidadel perfil e Icg +mwb
2x2α = Iα es el momento de inercia en el eje elastico.
Aunque para obtener predicciones mas precisas de la respuesta aeroelastica del sistema se puedarequerir una profunda compresion del modelo no estacionario, varios autores [10] han demostrado quela mayorıa de las cargas no estacionarias son despreciables en el caso de que la frecuencia reducida,k, sea baja. Por tanto las cargas aerodinamicas no estacionarias pueden ser modeladas en una teorıacuasi-estacionaria.
Las cargas aerodinamicas se calculan con un modelo cuasi-estacionario que incluye el efecto de laentrada en perdida y se expresan como [1]
L = ρU2bclα(αeff − csα3
eff
),
M = ρU2b2cmα(αeff − csα3
eff
),
donde cs es un parametro no lineal asociado con la entrada en perdida. El angulo de ataque efectivodebido al movimiento instantaneo del perfil esta dado por
αeff =
[α+
h
U+
(1
2− a)bα
U
].
La dependencia de las rigideces de torsion y flexion con los grados de libertad puede expresarse como
kα (α) = kα0+ kα1
α+ kα2α2 + · · · ,
ykh (h) = kh0
+ kh1h+ kh2
h2 + · · · .
Para simplificar el analisis no lineal asociado con la ecuacion (3.4) se usara el primer termino deldesarrollo de Taylor para el seno y el coseno con α 1, resultando que: sin(α) ∼ α + O (α3) ycos(α) ∼ 1 +O (α2) y teniendo en cuenta que sin(α)α2 1, la ecuacion (3.4) queda de la siguientemanera, expresada en forma matricial

3.2. MODELOS NO LINEALES DE FLUTTER 33
Figura 3.7: Cl(α) medido en tunel de viento [2].
[mT mwxαb
mwxαb Iα
] [hα
]+
[ch 00 cα
] [hα
]+
[kh(h) 0
0 kα(α)
] [hα
]=
[−LM
]. (3.5)
Para el calculo de cs se hace uso de la grafica 3.7 y del modelo de Cl = Clα(α− csα3). El maximode Cl se alcanzara en el entorno de la perdida, αstall, y por tanto, si hacemos
dCldα≈ Clα
(1− 3csα
2stall
)= 0,
se obtiene cs ≈ 1/(3α2stall) ≈ 10.833.
Para expresar las ecuaciones del movimiento en la formulacion del espacio de estados, se definenlas siguientes variables de estado
X =
X1
X2
X3
X4
=
hα
hα
.El sistema puede escribirse usando las variables de estado como X = F (X , U) donde
F (X,U) =
X3
X4
−ph(X1)X1 −(k1U
2 + pα(X2))X2 − d1X3 − d2X4 + gNL1(X)
−qh(X1)X1 −(k2U
2 + qα(X2))X2 − d3X3 − d4X4 + gNL2(X)
,
siendo las variables del sistema las que se indican en la tabla 3.1.
En forma vectorial, las ecuaciones del movimiento pueden expresarse
X = A (U) X + Q (X,X) + C (X,X,X), (3.6)
donde Q (X,X) es un vector cuadratico de las variables de estado, C(X,X,X) es un vector cubicofuncion de dichas variables y la matriz A(U) se expresa como
A (U) =
0 0 1 00 0 0 1
−Iαkh0/d −
(k1U
2 −mwxαbkα0/d)−d1 −d2
mwxαbkh0/d −
(k2U
2 +mT kα0/d)
−d3 −d4
.

34 CAPITULO 3. ANALISIS DE LA ESTABILIDAD DEL SISTEMA
Variables del sistema no lineal
d = mT Iα − (mwxαb)2
k1 =(Iαρbclα +mwxαρb
3cmα)/d
k2 = −(mwxαρb
2clα +mT ρb2cmα
)/d
d1 =[Iα (ch + ρUbclα) +mwxαρUb
3cmα]/d
d2 =[IαρU
2clα(12 − a
)−mwxαbclα +mwxαρUb
4cmα(12 − a
)]/d
d3 =[−mwxαb (ch + ρUbclα)−mTxαρUb
2cmα]/d
d4 =[mT
(cα − ρUb3cmα
(12 − a
))−mwxαρUb
3clα(12 − a
)]/d
pα(X) = −mwxαbkα(X)/dqα(X) = mT kα(X)/dph(X) = Iαkh(X)/dqh(X) = −mwxαbkh(X)/dgNL1(X) =
(csρU
2b) (clαIα +mwxαb
2cmα)α3eff (X)/d
gNL2(X) = −(csρU
2b2)
(clαmwxα +mT cmα)α3eff (X)/d
Tabla 3.1: Parametros del modelo no lineal.
Basandonos en el conjunto de autovalores de la matriz A(U), podemos evaluar la estabilidad dela solucion trivial de la ecuacion (3.6).
Estos autovalores son complejos conjugados dos a dos. La velocidad para la cual uno o mas au-tovalores tienen parte real cero, es decir, dan lugar a centros lineales, corresponde con el inicio dela inestabilidad y se denomina velocidad de flutter, Uf . En realidad lo que ocurre es que un par deautovalores complejos conjugados cruza el eje imaginario hacia el eje real positivo produciendose unabifurcacion de Hopf cuando la parte real de los autovalores se hace cero.
El desarrollo que se sigue a continuacion esta tomado de [1]. Para derivar la forma normal de labifurcacion de Hopf del sistema aeroelastico en las proximidades del comienzo de la inestabilidad Uf ,anadimos un termino de perturbacion, σUUf , a la velocidad de flutter U = Uf+σUUf que conduce a laaparicion de terminos seculares de tercer orden. Consecuentemente, la matriz A(U) puede expresarsecomo:
A(U) = A(Uf ) + σUA1(Uf ),
donde
A1 (U) =
0 0 0 00 0 0 00 −2k1U
2f −d1Uf −d2Uf
0 −2k2U2f −d3Uf −d4Uf
.Por tanto, la ecuacion (3.6) puede reescribirse como:
X = A(Uf )X + σUA1(Uf )X + Q (X,X) + C (X,X,X), (3.7)
dondeQT = [0,Q2,0,Q4] , CT = [0,C2,0,C4] .
Sea P la matriz cuyas columnas son los autovectores de la matriz A(Uf ) correspondientes a losautovalores ±jω1 − µ1 y ±jω2 y definamos el vector Y tal que X = PY, entonces la ecuacion (3.7)puede ser reescrita como:
P Y = A(Uf )PY + σUA1(Uf )PY + Q (PY,PY) + C (PY,PY,PY). (3.8)
Ası, multiplicando la ecuacion (3.8) a la izquierda por la matriz inversa de P , P−1, se obtiene:
Y = JY + σUKY + P−1Q (PY,PY) + P−1C (PY,PY,PY), (3.9)
donde J = P−1A(Uf )P es una matriz diagonal cuyos elementos son los autovalores ±jω1−µ1 y ±jω2
y K = P−1A1(Uf )P . Con esta formulacion se puede ver que Y2 = Y1 y que Y4 = Y3.

3.2. MODELOS NO LINEALES DE FLUTTER 35
Y3 en forma polar se puede expresar como
Y3 =1
2aej(ω2t+θ),
donde a es la amplitud de las oscilaciones y θ es su fase. De acuerdo al teorema de la variedad centraly operando convenientemente en la ecuacion (3.9) se obtienen los siguientes valores para la formanormal de la bifurcacion de Hopf:
a = βra+1
4Nera
3,
θ = βi +1
4Neia
2,
donde β = σUK33 y los subındices r e i denotan las partes real e imaginaria, respectivamente. Laecuacion para Y3 = f
(Y3, Y3
)tiene tres soluciones dadas por
a = 0; a = ±√−4βrNer
,
donde a = 0 es la solucion trivial. Las otras soluciones son no triviales. El origen es asintoticamenteestable para βr < 0 o para βr = 0 y Ner < 0, inestable para βr > 0 o para βr = 0 y Ner > 0.Las soluciones no triviales existen cuando βrNer < 0. Dichas soluciones son estables (bifurcacion deHopf supercrıtica) para βr > 0 y Ner < 0 e inestables (bifurcacion de Hopf subcrıtica) para βr < 0 yNer > 0. Usando la forma normal, las amplitudes del LCO para los movimientos de torsion (Aα) yflexion (Ah) estan dadas por:
Ah = a
√P [1, 3]r
2+ P [1, 3]i
2,
Aα = a
√P [3, 3]r
2+ P [3, 3]i
2,
donde [−]r y [−]i denotan las partes real e imaginaria, respectivamente.
3.2.2. Modelo cuasiestacionario
Se modela la seccion del ala como un sistema aeroelastico con movimientos restringidos a dosgrados de libertad, a saber, desplazamiento vertical del eje elastico (h) y giro del perfil alrededor dedicho eje o angulo de ataque (α). Las ecuaciones de movimiento (3.10) que gobiernan este sistemaestan tomadas de [2].
En la aproximacion cuasiestacionaria, la funcion de Theodorsen C(k) se hace igual a la unidad.Este supuesto implica despreciar el tiempo de transmision de la informacion desde que se producenlas oscilaciones no estacionarias hasta que su efecto en las fuerzas aerodinamicas ocurre, por tantola transmision de la informacion serıa instantanea; de esta manera se limita el modelo a pequenosvalores de la frecuencia reducida k,
Mq +Dq +Kq +Q(q, q) +N(q, q, q) = 0, (3.10)
es decir,q = D∗q +K∗q −M−1Q(q, q)−M−1N(q, q, q), (3.11)
donde D∗ = −M−1D y K∗ = −M−1K.
Introduciendo las variables de estado
X =
X1
X2
X3
X4
=
h
hαα
,el sistema (3.11) puede reescribirse como
X1 = X2,

36 CAPITULO 3. ANALISIS DE LA ESTABILIDAD DEL SISTEMA
K∗11 = −I ′
αkh0K∗12 = −I ′
α2πρbU2 + S′
α
(kα0 − 2π (1/2 + a) ρb2U2
)K∗21 = S
′
αkh0K∗22 = S
′
α2πρbU2 −m′
T
(kα0 − 2π (1/2 + a) ρb2U2
)D∗11 = −I ′
α (ch + 2πρbU)− S′
α2π (1/2 + a) ρb2U
D∗12 = −I ′
α2 (1− a)πρb2U + S′
α
(cα + a (2a− 1)πρb3U
)D∗21 = S
′
α (ch + 2πρbU) +m′
T 2π (1/2 + a) ρb2U
D∗22 = S′
α2 (1− a)πρb2U −m′
T
(cα + a (2a− 1)πρb3U
)Tabla 3.2: Coeficientes de la matriz B(U).
m′
T = mT+πρb2
det(M)
S′
α = Sα−aπρb3det(M)
I′
α =Iα+π( 1
8+a2)ρb4
det(M)
det (M) =(mT + πρb2
) (Iα + π
(18 + a2
)ρb4)−(Sα − aπρb3
)2Tabla 3.3: Coeficientes de la matriz M−1.
X3 = X4,[X2
X4
]= D∗
[X2
X4
]+K∗
[X1
X3
]−M−1
[0
kα1X23
]−M−1
[0
kα2X33
]. (3.12)
Escrito en forma matricial el sistema en el espacio de estados es
X = B(U)X +Nq(X,X) +Nc(X,X,X), (3.13)
donde
B (U) =
0 1 0 0K∗11 D∗11 K∗12 D∗12
0 0 0 1K∗21 D∗21 K∗22 D∗22
, (3.14)
Nq (X,X) =
0Nq2
0Nq4
, (3.15)
Nc (X,X,X) =
0Nc20Nc4
. (3.16)
Los coeficientes de B(U) y de la matriz de masa inversa, M−1, son los reflejados en las tablas(3.2) y (3.3), respectivamente.
Este modelo tiene en cuenta las no linealidades que aparecen en el sistema a traves de la rigidez.
3.2.3. Modelo no estacionario
Las ecuaciones que rigen la dinamica del sistema cuando se tiene en cuenta el efecto no estacionariode las fuerzas aerodinamicas, vienen dadas por

3.2. MODELOS NO LINEALES DE FLUTTER 37
Mnsp+Dnsp+Knsp+Q1(p, p) +N1(p, p, p) = 0. (3.17)
Multiplicando (3.17) a la izquierda por la matriz inversa de masa del sistema ampliado, Mns−1,
obtenemosp = D∗nsp+K∗nsp−Mns
−1Q1(p, p)−Mns−1N1(p, p, p), (3.18)
donde D∗ns = −M−1ns Dns y K∗ns = −M−1ns Kns.
Expresando dichas ecuaciones (3.18) en terminos de las variables de estado
Z =[h, h, α, α, x, ˙x
]T(3.19)
se obtienen las ecuaciones
Z1 = Z2,
Z3 = Z4,
Z5 = Z6,
Z2
Z4
Z6
= D∗ns
Z2
Z4
Z6
+K∗ns
Z1
Z3
Z5
−M−1ns 0kα1Z
23
0
−M−1ns 0kα2Z
33
0
, (3.20)
que combinadas se pueden expresar de la forma
Z = Fns(U)Z +Nnsq(Z,Z) +Nnsc(Z,Z,Z). (3.21)
Los matrices que aparecen en (3.21) tienen la siguiente forma
Fns (U) =
0 1 0 0 0 0
K∗111 D∗111 K∗112 D∗112 K∗113 D∗1130 0 0 1 0 0
K∗121 D∗121 K∗122 D∗122 K∗123 D∗1230 0 0 0 0 1
K∗131 D∗131 K∗132 D∗132 K∗133 D∗133
, (3.22)
Nnsq (Z,Z) =
0
Nnsq20
Nnsq400
, (3.23)
Nnsc (Z,Z,Z) =
0
Nnsc20
Nnsc400
. (3.24)
En la tabla 3.4 aparece la expresion de los coeficientes de la matriz Fns.

38 CAPITULO 3. ANALISIS DE LA ESTABILIDAD DEL SISTEMA
K∗111 = −I ′
αkhK∗112 = −I ′
α2πρbφU2 + S′
α
(kα0 − 2π (1/2 + a) ρb2φU2
)K∗113 = −I ′
α2πρU3c2c4 (c1 + c3)− S′
α2πρbU3 (1/2 + a) c2c4 (c1 + c3)
K∗121 = S′
αkhK∗122 = S
′
α2πρbφU2 −m′
T
(kα0 − 2π (1/2 + a) ρb2φU2
)K∗123 = S
′
α2πρU3c2c4 (c1 + c3) +m′
T 2πρbU3 (1/2 + a) c2c4 (c1 + c3)K∗131 = 0K∗132 = U
b
K∗132 = −c2c4 U2
b2
D∗111 = −I ′
α (ch + 2πρbφU)− S′
α2π (1/2 + a) ρb2φU
D∗112 = −I ′
α2π (1 + φ (1− 2a)) ρb2U + S′
α (cα + (1/2− a) (1− φ (1 + 2a)))πρb3U
D∗113 = −I ′
α2πρU2τ − S′
α2πρU2τ (1/2 + a)
D∗121 = S′
α (ch + 2πρbφU) +m′
T 2π (1/2 + a) ρb2φU
D∗122 = S′
α2π (1 + φ (1− 2a)) ρb2U −m′
T (cα + (1/2− a) (1− φ (1 + 2a)))πρb3U
D∗123 = S′
α2πρU2τ +m′
T 2πρU2τ (1/2 + a)D∗131 = 1
bD∗132 = 1
2 − aD∗133 = − (c2 + c4) Ub
Tabla 3.4: Coeficientes de la matriz Fns(U).
3.3. Estimacion del punto de bifurcacion de Hopf en el siste-ma aeroelastico
La estimacion del punto de bifurcacion de Hopf es un prerrequisito importante para el analisis nolineal mediante la forma normal de la bifurcacion. Aunque aquı no entraremos en un estudio analıticoamplio de la bifurcacion de Hopf, resulta interesante realizar una estimacion del punto de bifurcacionmediante metodos algebraicos y comparar dicho resultado con el obtenido a traves de la continacionnumerica del sistema dinamico mediante AUTO7P.
Un metodo clasico para el estudio de la estabilidad de un sistema dinamico es el denominadocriterio de Routh-Hurwitz que, como se vera resulta poco practico cuando aumenta el numero degrados de libertad del sistema. Mucho mas util desde un punto de vista practico resulta aprovecharlas propiedades matematicas que posee el sistema dinamico en el punto de bifurcacion de Hopf y deahı derivar las ecuaciones que nos permitan obtener los valores de la velocidad y la frecuencia a lasque aparece la bifurcacion.
3.3.1. Criterio de Routh-Hurwitz
Para aplicar el criterio de Routh-Hurwitz partimos del jacobiano del sistema dinamico que, par-ticularizado en el punto de equilibrio, nos permite mediante el calculo del polinomio caracterıstodeterminar la estabilidad del sistema en las inmediaciones del equilibrio.
La matriz jacobiana del sistema aeroelastico con dos grados de libertad puede escribirse de acuerdocon la notacion utilizada anteriormente como
J (X) =
0 1 0 0
K∗11 D∗11 K∗12 + 2N′
q2X3 + 3N′
c2X23 D∗12
0 0 0 1
K∗21 D∗21 K∗22 + 2N′
q4X3 + 3N′
c4X23 D∗22
. (3.25)
El jacobiano en el equilibrio, en este caso en el punto de equilibrio trivial, nos da la matrizcaracterıstica de la dinamica del sistema que llamamos B(U), es decir,
J (X) |eq = B(U),

3.3. ESTIMACION DEL PUNTO DE BIFURCACION DE HOPF 39
a1 = −D∗11 −D∗22a2 = D∗11 −K∗11 −K∗22 −D∗12D∗21a3 = K∗11D
∗22 +K∗22D
∗11 +K∗21D
∗12 −K∗12D∗21
a4 = K∗11K∗22 −K∗12K∗21
Tabla 3.5: Coeficientes del polinomio caracterıstico P (λ).
por tanto, haciendo det(B(U)− λI) = 0 nos da el polinomio caracterıstico.
Expresamos dicho polinomio caracterıstico que sera de cuarto grado en λ, esto es,
P (λ) = λ4 + a1λ3 + a2λ
2 + a3λ+ a4 = 0. (3.26)
Usamos para estimar el punto de bifurcacion el modelo cuasiestacionario con dos grados de liber-tad que se describe en la seccion 3.2.2.
Aplicando el criterio de estabilidad de Routh-Hurwitz se puede demostrar que la condicion crıticaa la cual se produce el flutter es
a1a2a3 − a21a4 − a23 = 0,
y con dicha condicion se puede calcular la velocidad de flutter. La frecuencia de flutter viene dadapor la expresion
ωF =
√a3a1.
En este caso en que nuestro sistema posee dos grados de libertad la aplicacion del criterio deRouth-Hurwitz nos lleva a expresiones sencillas que nos permiten determinar la estabilidad del sistemaaeroelastico. Sin embargo, el proceso se vuelve muy engorroso si pretendemos la generalizacion paraun mayor numero de grados de libertad.
3.3.2. Aproximacion simbolica
Haciendo uso de que en el punto de bifurcacion de Hopf el sistema posee un par de autovaloresimaginarios puros se pueden obtener expresiones mas generales que nos permitan determinar la fre-cuencia y la velocidad del sistema en el punto de bifurcacion.
El polinomio caracterıstico puede dividirse por(λ2 + ω2
)que se corresponde con las raıces ima-
ginarias puras, (±iω), que se derivan de la condicion crıtica para el flutter. Ası,
P (λ) =(λ2 + ω2
) (λ2 + a1λ+
(a2 − ω2
))+R, (3.27)
donde el resto, R, esta dado por
R =(a3 − a1ω2
)λ+
(a4 −
(a2 − ω2
)ω2). (3.28)
Se puede notar que el resto R es funcion unicamente de la velocidad del fluido U y de la frecuenciaω. Lo que es mas importante, si se tiene una solucion aceptable desde el punto de vista fısico, talque el resto R se hace cero, entonces el polinomio caracterıstico posee un par de raıces conjugadasimaginarias puras (±iω) correspondiendose con el punto de bifurcacion de Hopf que es equivalente ala condicion de flutter.
Esto quiere decir que para la velocidad de flutter el polinomio caracterıstico es divisible por(λ2 + ω2
F
), lo que deriva la obtencion de la velocidad y frecuencia de flutter resolviendo el sistema de
ecuacionesf1 (ωF , UF ) = a3 − a1ω2
F = 0, (3.29)
f2 (ωF , UF ) = a4 −(a2 − ω2
F
)ω2F = 0. (3.30)
Se observa como de f1 se obtiene la misma frecuencia de flutter que se dio anteriormente.
Implementando en MATLAB el sistema no lineal de dos ecuaciones con dos incognicas, U, ω, seobtienen los valores reflejados en la tablas 3.6 y 3.7.

40 CAPITULO 3. ANALISIS DE LA ESTABILIDAD DEL SISTEMA
UF [m/s] ωF [rad/s]Estimacion analıtica 9.12252 14.8885AUTO7P 9.1198 14.8125
Tabla 3.6: Velocidad y frecuencia de inicio de la Hopf para el modelo cuasiestacionario [1].
UF [m/s] ωF [rad/s]Estimacion analıtica 14.3618 17.5091AUTO7P 14.3547 17.5083
Tabla 3.7: Velocidad y frecuencia de inicio de la Hopf para el modelo con efecto de perdida [2].
3.3.3. Extension para tres grados de libertad
En cierto modo es complicado aplicar el metodo de Routh-Hurwitz para sistemas aeroelasticos demayor orden ya que el determinante a resolver se vuelve muy complicado y no existe un criterio obviopara determinar el flutter, a diferencia de lo que ocurre con el sistema de dos grados de libertad. Sinembargo, la extension de la aproximacion simbolica es relativamente directa.
Se va a desarrollar para el caso de tres grados de libertad, como el modelo no estacionario quese ha elegido. Dicho modelo para poder incluir el efecto de la no estacionariedad de las fuerzas aero-dinamicas introduce un grado de libertad ficticio, que no se corresponde con ninguno fısico y que sellamo x.
El polinomio caracterıstico en este caso tendra grado seis y su forma sera
P (λ) = λ6 + a1λ5 + a2λ
4 + a3λ3 + a3 + a4λ
2 + a5λ+ a6. (3.31)
Dicho polinomio puede dividirse por(λ2 + ω2
F
)obteniendo como resto
R =(a5 − ω2
F
(a3 − a1ω2
F
))λ+
(a6 − ω2
F
(a4 − ω2
F
(a2 − ω2
F
))). (3.32)
Por consiguiente el conjunto de ecuaciones a resolver para el calculo de la velocidad y la frecuenciade flutter es
f1 (ωF , UF ) = a5 − ω2F
(a3 − a1ω2
F
)= 0, (3.33)
f2 (ωF , UF ) = a6 − ω2F
(a4 − ω2
F
(a2 − ω2
F
))= 0, (3.34)
donde los coeficientes del polinomio caracterıstico son
a1 = −D∗111 −D∗122 −D∗133, (3.35)
a2 = D∗111D∗122 +D∗111D
∗133 +D∗122D
∗133 −D∗131D∗113
−D∗132D∗123 −D∗121D∗112 −K∗133 −K∗122 −K∗111, (3.36)
a3 = −D∗111D∗122D∗133 −D∗112D∗123D∗131 −D∗113D∗121D∗132 +D∗131D∗122D
∗113 +D∗132D
∗123D
∗111
+D∗133D∗121D
∗112 +K∗133 (D∗111 +D∗122)−K∗113D∗131 −D∗132K∗123 +K∗122 (D∗111 +D∗133)
+K∗111 (D∗122 +D∗133)−K∗132D∗123 −D∗121K∗112 −K∗131D∗113 −D∗112K∗121, (3.37)
a4 = −K∗133D∗111D∗122 −K∗122D∗111D∗133 −K∗111D∗122D∗133 −K∗112D∗123D∗131 −K∗132D∗113D∗121+K∗122D
∗131D
∗131 +K∗132D
∗123D
∗111 +K∗112D
∗133D
∗121 −K∗123D∗112D∗131 −K∗113D∗121D∗132
+K∗113D∗131D
∗122 +K∗123D
∗132D
∗111 +K∗133D
∗121D
∗112 −K∗131D∗112D∗123 −K∗121D∗113D∗132
+K∗131D∗122D
∗113 +K∗111D
∗132D
∗123 +K∗121D
∗133D
∗112 −K∗132K∗123 +K∗122K
∗133
+K∗111K∗133 −K∗131K∗113 +K∗111K
∗122 −K∗121K∗112, (3.38)

3.4. EFECTO DE LA AERODINAMICA NO ESTACIONARIA 41
UF [m/s] ωF [rad/s]Estimacion analıtica 9.12252 14.8885AUTO7P 9.1205 14.9108
Tabla 3.8: Velocidad y frecuencia de inicio de la Hopf para el modelo cuasiestacionario [1].
UF [m/s] ωF [rad/s]Estimacion analıtica 14.3618 17.5091AUTO7P 14.3547 17.5083
Tabla 3.9: Velocidad y frecuencia de inicio de la Hopf para el modelo con efecto de perdida [2].
a5 = −K∗122K∗133D∗111 −K∗112K∗123D∗131 −K∗113K∗132D∗121 +K∗122K∗133D
∗131 +K∗132K
∗123D
∗111
+K∗133K∗112D
∗121 −K∗111K∗133D∗122 −K∗123K∗131D∗112 −K∗113K∗121D∗132 +K∗131K
∗113D
∗122
+K∗111K∗123D
∗132 +K∗133K
∗121D
∗112 −K∗111K∗122D∗133 −K∗112K∗131D∗123 −K∗121K∗132D∗113
+K∗131K∗122D
∗113 +K∗132K
∗111D
∗123 +K∗121K
∗112D
∗133, (3.39)
a6 = −K∗111K∗122K∗133 −K∗112K∗123K∗131 −K∗113K∗121K∗132 +K∗131K∗121K
∗113
+K∗132K∗123K
∗111 +K∗133K
∗121K
∗112. (3.40)
Implementando en MATLAB el sistema no lineal de dos ecuaciones con dos incognicas, U, ω, seobtienen los valores reflejados en la tabla 3.8.
3.4. Efecto de la aerodinamica no estacionaria
Es interesante, desde el punto de vista del modelado aerodinamico del sistema aeroelastico, verque efecto sobre la velocidad y la frecuencia de flutter tiene el grado de no estacionariedad de lasfuerzas aerodinamicas. Se han usado dos modelos para el calculo de los distintos parametros de flutter.Uno de ellos es una aproximacion cuasiestacionaria del modelo de Theodorsen en el que se suponeque la frecuencia reducida del sistema k 1 y por tanto la funcion de Theodorsen C(k) tiende a 1.Por otro lado se ha utilizado la aproximacion de Sears para poder trasladar el efecto de la funcionde Theodorsen del dominio de la frecuencia al dominio del tiempo. Ambas aproximaciones nos danvalores tanto de la velocidad como de las frecuencias de flutter que estan en consonancia con la lite-ratura consultada (ver [13] y [2] entre otros).
Visto esto, lo que se pretende en esta seccion es observar el efecto de la mayor o menor estacionarie-dad de las fuerzas aerodinamicas. Para ello primero se debe observar que es la frecuencia reducida k laque nos situa en un rango u otro. Para valores altos de la frecuencia reducida k estaremos en un regi-men altamente no estacionario, mientras que para k 1 nos aproximaremos al caso cuasiestacionario.
Para poder observar la influencia de k hemos de ver cual es la dependencia de la funcion de Theo-dorsen y la funcion de Sears de dicha frecuencia reducida. Haciendo tender k a cero, caso k 1,tenemos, como se dijo mas arriba, que C(k)→ 1. Se puede observar que al hacer tender k a cero, lavariable τ → ∞ y, por tanto, la aproximacion analıtica de funcion de Wagner φ(τ) → c0. Se buscadefinir unos parametros tal que, al hacer tender dichos parametros a un determinado valor, se recu-pere la aproximacion cuasiestacionaria a partir de la no estacionaria y se pueda ver el efecto de la noestacionariedad en el flutter.
La funcion de aproximacion de Sears puede tomar valores en el intervalo [0.5, 1] siendo el lımiteinferior el correspondiente al inicio del regimen transitorio, por analogıa con los circuitos electricos, ypor tanto con una fuerte carga no estacionaria, y el lımite superior la aproximacion cuasiestacionaria.Se tomaran como parametros para el estudio de la influencia de la no estacionariedad c1 y c3. Para

42 CAPITULO 3. ANALISIS DE LA ESTABILIDAD DEL SISTEMA
ǫ
0 0.2 0.4 0.6 0.8 1
Uf (
m/s
)
177.5
178
178.5
179
179.5
180
180.5
Figura 3.8: Velocidad de flutter en funcion de ε.
ǫ
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
ωf (
rad/
s)
2.13
2.14
2.15
2.16
2.17
2.18
2.19
2.2
2.21
2.22
2.23ω
f
Figura 3.9: Frecuencia de flutter en funcion de ε.
ello se introducira en el analisis el parametro ε de forma que, al hacer tender ε a cero, se recupere elmodelo cuasiestacionario, esto es,
φ(τ) = c0 − ε(c1e−c2τ + c3e
−c4τ). (3.41)
Pongase enfasis en el hecho de que al introducir el parametro ε y hacerlo tender a cero, se modificala forma de la funcion de aproximacion de Sears, pero se respeta la tendencia asintotica y el caracterde la funcion y, por tanto, representa cualitativamente el efecto de la no estacionariedad, o mejordicho, la evolucion entre el caso cuasiestacionario y el no estacionario.
En la figura 3.9 se observa en todo caso que la frecuencia a la que se produce el flutter, ωf , dismi-nuye en el caso no estacionario con respecto al caso cuasiestacionario. La relacion entre el decremento

3.4. EFECTO DE LA AERODINAMICA NO ESTACIONARIA 43
de ωf y el parametro ε es lineal, es decir, a medida que nos alejamos cualitativamente del modelocuasiestacionario la frecuencia a la que se produce el fenomeno del flutter va disminuyendo en unaproporcion lineal.
Para explicar el efecto de las fuerzas no estacionarias pongase como ejemplo un perfil que estaoscilando en torsion a frecuencias reducidas, k, pequenas. Como consecuencia de la oscilacion apareceuna sustentacion casi estacionaria en fase con el movimiento del perfil debido al angulo de ataqueinstantaneo del mismo y otra en desfase inducida por los torbellinos de la estela. Cuando α crece,los torbellinos de la estela inducen una sustentacion negativa y cuando α decrece, una sustentacionpositiva.
Si la frecuencia reducida es pequena, los torbellinos responsables de la sustentacion inducida sonaquellos arrojados durante parte del ciclo de oscilacion inmediatamente anterior a la observacion.Ambas sustentaciones actuan en el centro aerodinamico que esta situado en el punto c/4. La segunda,si el eje elastico de rotacion esta por delante del centro aerodinamico, realiza trabajo positivo duranteparte del ciclo, ocasionando flutter o flameo. Si la frecuencia de oscilacion aumenta, el numero deciclos de estela que afectan a la sustentacion en desfase es mayor, el centro de presion de esta susten-tacion comienza a oscilar y el sistema puede no entrar en flutter.
44 CAPITULO 3. ANALISIS DE LA ESTABILIDAD DEL SISTEMA

Capıtulo 4
Continuacion numerica deequilibrios y de orbitas periodicas
4.1. Metodos de continuacion: analisis de las ecuaciones en elespacio de estados
Los Metodos de Continuacion se utilizan en la construccion de los conjuntos de bifurcaciones aso-ciados a sistemas de ecuaciones diferenciales ordinarias, ~x = ~f(~x, λ), y proporcionan resultados detipo cualitativo y cuantitativo. Se trata de obtener informacion de las soluciones del sistema cuandovariamos ciertos parametros de control.
En primer lugar se asume que el sistema de ecuaciones ~x = ~f(~x, λ) admite soluciones periodicascon periodo T en un rango de valores del parametro λ. El tiempo puede ser adimensionalizado con elperiodo T, es decir, τ = t/T , por lo que el sistema de ecuaciones diferenciales puede escribirse
d~x
dτ= T ~f(~x, λ), (4.1)
con la condicion de contorno ~x(0) = ~x(1). El periodo T pasa a ser otro parametro del problema.
La base de la continuacion numerica es formular este sistema de ecuaciones diferenciales como unsistema de ecuaciones no lineales de la forma ~F (~x(τ), λ) = ~0. Este cambio se logra mediante un meto-do de integracion numerica (metodo de las diferencias finitas), integrando las ecuaciones anterioresdurante un periodo T .
Por otro lado los metodos de continuacion tambien se aplican en la busqueda de soluciones de laecuacion ~f(~x, λ) = ~0, que es equivalente a d~x/dt = 0, es decir, buscar las soluciones de equilibrio opuntos estacionarios del sistema (4.1). Cuando el valor del parametro varıa, las soluciones de equili-brio pueden ir variando.
En este contexto de calculo de las soluciones de equilibrio, las dos principales tareas de los metodosde continuacion son:
- Calcular las soluciones de equilibrio.
- Determinar la estabilidad de dichas soluciones.
Como ya hemos dicho, si el sistema de ecuaciones es de la forma ~x = ~f(~x, λ), las soluciones de
equilibrio satisfacen el sistema no lineal ~f(~x, λ) = ~0. Una vez encontradas las soluciones de equilibrio,determinar la estabilidad es directo aplicando el conocido resultado de Lyapunov: las soluciones deequilibrio del sistema de ecuaciones diferenciales d~x/dt = ~f(~x) son estables si todos los autovalo-
res del jacobiano de ~f (evaluado en la solucion de equilibrio) tienen parte real negativa. Determinarla estabilidad es realmente facil, la tarea mas complicada suele ser calcular las soluciones de equilibrio.
45

46 CAPITULO 4. CONTINUACION NUMERICA
AUTO7P Param. fısico Unidades Valor inicial Lımites1 U [m/s] 0 ≥ 02 a [-] -0.5 [−1, 1]3 ch [kg/s] 0.11 ≥ 04 cα [kg m2/s] 0.115 ≥ 05 xα [-] 0.5 [−1, 1]6 ρ [kg/m3] 1.204 [0.01, 1.5]7 kα0
[N/m] 0.942 ≥ 08 kh0 [N/m] 895.10 ≥ 09 kα1
[N/m] 3.95 ≥ 010 kα2
[N/m] 15 ≥ 0
Tabla 4.1: Valores iniciales de los parametros variables de AUTO7P.
Parametro ValorΛ [m] 0.6b [m] 0.0325mw [kg] 1.0662mT [kg] 3.836Iα [kg m2] 0.0004438
Tabla 4.2: Valores de los parametros que no varıan.
Si el sistema incluye un parametro λ, esto es, d~x/dt = ~f(~x, λ), las soluciones de equilibrio se obtie-
nen como solucion del sistema de ecuaciones ~f(~x, λ) = 0. Las soluciones estacionarias ahora dependen
del parametro λ, por lo que se deben encontrar las soluciones ~x(λ) tal que ~f(~x(λ), λ) = 0. Las curvas~x(λ) se conocen como diagramas de bifurcacion y caracterizan de forma cualitativa la dinamica delsistema de ecuaciones diferenciales.
Existen en la actualidad diversos codigos que incluyen herramientas de continuacion y deteccionde bifurcaciones en sistemas de ecuaciones diferenciales. De todos ellos, aquı se empleara el codigoAUTO desarrollado en Fortran por la Universidad de Concordia (Montreal) y el Instituto Tecnologi-co de California CALTECH, y cuyo funcionamiento se describe en la seccion 1.2.
Estos metodos resultan especialmente utiles ya que proporcionan, con un coste computacionalbajo, un estudio de las posibles respuestas del sistema. Por ejemplo, en estructuras aeronauticas, ladeteccion de una bifurcacion de Hopf indica que la respuesta deja de ser estacionaria y pasa a seroscilatoria, un cambio cualitativo importante que indica la aparicion de movimiento no amortiguadoque afecta a la fatiga, a las cualidades de vuelo, etc.
4.2. Modelo cuasiestacionario
4.2.1. Parametros y variables en AUTO7P
El programa AUTO7P permite la eleccion de hasta diez parametros variables distintos para lacontinuacion numerica del sistema dinamico que se estudia. En este caso las variables seleccionadasası como los valores iniciales se muestran en la tabla 4.1, el resto de parametros esta fijado y secorresponden con los de la tabla 4.2.
4.2.2. Deteccion del punto de bifurcacion de Hopf
El programa detecta la aparicion de una bifurcacion de Hopf, indicada mediante la etiqueta HB,para un valor de la velocidad de U ≈ 14.354761 m/s, la cual coincide con la velocidad de flutter, Uf ,calculada anteriormente para el modelo en cuestion.

4.2. MODELO CUASIESTACIONARIO 47
Figura 4.1: Amplitud del LCO en funcion de la velocidad flutter.
En la figura 4.1 se muestra la norma euclıdea de los equilibrios, L2NORM , frente a la velocidad yse observa que el punto de bifurcacion esta en el valor de U comentado anteriormente. Vemos tambien,por la forma de la curva, que la bifurcacion de Hopf tiene caracter subcrıtico.
4.2.3. Posibles degeneraciones. Caracter subcrıtico y supercrıtico
Aparecen degeneraciones en la dinamica del sistema para ciertos valores de los parametros. Tam-bien se observan cambios en el caracter de la bifurcacion de Hopf que pasa de subcrıtica a supercrıticao viceversa al movernos por los mapas parametricos. En este caso no se observa la existencia de equi-librios no triviales por lo que la dinamica del sistema se simplifica.
Para los valores dados de los parametros, los coeficientes de los terminos no lineales no influyenlogicamente en el punto de aparicion de la bifurcacion de Hopf pero sı en el caracter de esta. Mo-viendonos en el plano (ρ, kα1
), se encuentran valores del parametro kα1para los cuales la Hopf es
subcrıtica y valores para los cuales es supercrıtica. En la figura 4.2 se observa que para un valor dela densidad, ρ = 1.204 kg/m3 se tienen dos valores crıticos de kα1cr
, de los cuales solo nos interesa elpositivo kα1cr
≈ 5.23, obteniendo que si 0 < kα1< kα1cr
la bifurcacion de Hopf sera supercrıtica y encaso contrario subcrıtica.
4.2.4. Mapas de parametros
Tomando distintos valores de kα1en el plano U -ρ se observa como la curva presenta dos cambios
de caracter, existiendo una zona central con caracter subcrıtico que separa dos zonas de caractersupercrıtico. En la grafica 4.3 se muestra dicho comportamiento para un valor de kα1 = 5.2 N/m.
A medida que hacemos tender kα1hacia un valor crıtico, la zona subcrıtica central se va estre-
chando hasta que colapsa completamente y sobre toda la curva la Hopf es supercrıtica. En la tabla 4.3se observa dicho comportamiento. Las etiquetas GH1 y GH2 designan en AUTO7P puntos donde labifurcacion de Hopf tiene una degeneracion. El valor de la velocidad de flutter en el punto de colapso

48 CAPITULO 4. CONTINUACION NUMERICA
Figura 4.2: Caracter de la bifurcacion de Hopf en funcion de kα1.
kα1[N/m] ρ(GH1) [kg/m3] ρ(GH2) [kg/m3]
5.25 0.3 1.275.24 0.326 1.2425.23 0.35 1.2045.2 0.436 1.0785.18 0.519 0.9695.165 0.6279 0.84135.161 0.701 0.7635.160632 0.74521 -
Tabla 4.3: Degeneraciones de la bifurcacion de Hopf en el plano U -ρ.
es Uf ≈ 16.2962 m/s.
En adelante, en lo que concierne al analisis del modelo cuasiestacionario se ha tomado un valordel parametro kα1
= 6. Los siguientes planos de parametros muestran distintas degeneraciones queaparecen en la dinamica del sistema. Los parametros que faltan se han analizado, pero no se hanincluido sus planos porque no muestran degeneraciones y las bifurcaciones de Hopf tienen siemprecaracter supercrıtico independientemente del valor que tomen los parametros, debido a la eleccion dekα1
que se ha hecho.
En el plano U -a, como puede verse en la figura 4.5, se tiene que para valores de a > −0.649983la bifurcacion de Hopf tiene caracter subcrıtico, mientras que para a < −0.649983 es supercrıtica. Elvalor del parametro a en el punto donde aparece el cambio de caracter esta asociado a una velocidadde flutter, Uf ≈ 18.1189 m/s y el valor de dicha velocidad en el punto de bifurcacion crece a medidaque a se hace mas negativa. Se puede concluir que es beneficioso desde el punto de vista aeroelasticoque a sea lo mas pequena posible tendiendo al valor de −1. Esto se explica porque por un lado seretrasa la aparicion de flutter al aumentar la velocidad a la que se produce la Hopf y, por otro lado,dicha Hopf nace supercrıtica.

4.2. MODELO CUASIESTACIONARIO 49
Figura 4.3: Velocidad de flutter, U, frente a ρ para kα1= 5.2 N/m.
Figura 4.4: Velocidad de flutter, U, frente a ρ para kα1= 6.
En el plano U -ch, que se representa en la figura 4.6, se observa un comportamiento similar en este

50 CAPITULO 4. CONTINUACION NUMERICA
Figura 4.5: Velocidad de flutter, U, frente a a.
caso para un valor de ch ≈ 2.93536 kg/s que tiene asociada una velocidad de la corriente U ≈ 17.3567m/s. Para valores inferiores de ch la Hopf es subcrıtica y para valores superiores supercrıtica. Eneste caso conviene que el valor de ch sea mayor al crıtico ya que por un lado la velocidad de flutteres mayor y por otro la Hopf es supercrıtica. Aparece una degeneracion para ch negativo, sin interesdesde el punto de vista fısico.
En el plano U -cα, representado en la figura 4.7, tambien tenemos un cambio de caracter en labifurcacion de Hopf. El valor crıtico de cα para el cual se da dicho cambio es cα ≈ 0.016449 kg m2/s,siendo supercrıtica para valores superiores y subcrıtica en caso contrario. En este caso el comporta-miento observado es mas complejo, ya que la curva de los puntos de bifurcacion en el plano U -cα norelaciona unıvocamente cada U con un solo valor de cα. Aunque no de manera tan clara como en loscasos anteriores, se preferirıan valores de cα por encima del crıtico para que la Hopf tenga caractersupercrıtico. Para valores mayores cercanos al crıtico la velocidad de flutter disminuirıa lo cual esmuy perjudicial para el sistema, por tanto es conveniente evitar moverse por dicha zona prefiriendovalores de cα cαcr .
En el plano U -xα, en la figura 4.8, tambien aparece una degeneracion en el punto U ≈ 24.3855m/s, xα ≈ 0.194987 de manera que para valores mayores de xα el caracter de la Hopf es subcrıtico yen caso contrario es supercrıtico. Como puede verse en la figura 4.8, a medida que disminuye xα elpunto de aparicion de la Hopf se retrasa al aumentar la velocidad crıtica y dicha Hopf es supercrıtica.Por tanto es conveniente desde el punto de vista del diseno aeroelastico que nuestro modelo se situeen dicha zona.
4.2.5. Comparacion con el modelo lineal
Tanto el modelo lineal como el no lineal, en el caso cuasiestacionario que se contempla aquı, arro-jan la misma velocidad de inicio de flutter, sin embargo la informacion proporcionada por uno y porotro es muy distinta.

4.2. MODELO CUASIESTACIONARIO 51
Figura 4.6: Velocidad de flutter, U, frente a ch.
Figura 4.7: Velocidad de flutter, U, frente a cα.

52 CAPITULO 4. CONTINUACION NUMERICA
Figura 4.8: Velocidad de flutter, U, frente a xα.
El modelo lineal unicamente aporta informacion de la velocidad y la frecuencia en el punto deflutter dejando de predecir el comportamiento para una velocidad mayor. De hecho, para el modelolineal, la amplitud de oscilacion del sistema tras el flutter crece de manera indefinida hasta que seproduce el fallo del sistema. En el modelo lineal, el flutter se da cuando se produce la coalescenciade las frecuencias naturales de flexion y torsion, ωh y ωα respectivamente. En realidad lo que ocurreen el caso lineal no es que las frecuencias coincidan, sino que tienden asintoticamente al mismo valor,una por arriba y la otra por abajo.
El modelo no lineal, por otra parte, no solo aporta informacion del punto de flutter, sino queademas precide el comportamiento posterior para velocidades mayores a la de flutter. El inicio delflutter coincide con la aparicion de una bifurcacion de Hopf. A partir del punto de bifurcacion apare-cen en el sistema oscilaciones de ciclos lımite llamadas LCO, por sus siglas en ingles, cuya amplitudes creciente con la velocidad del flujo. Por tanto, para velocidades mayores a la de flutter el sistemaoscilara con una determinada frecuencia y amplitud que predice el modelo no lineal.
Por otro lado el modelo no lineal permite determinar, lo que podrıamos llamar, la impetuosidadcon la que aparece el fenomeno de flutter. Esto es lo que definimos como caracter de la bifurcacionde Hopf, que como se explico podıa ser subcrıtico o supercrıtico. En nuestro modelo se han obser-vado ambos tipos de caracter si nos movemos por los distintos mapas parametricos, lo cual nos dejaentrever la complejidad del fenomeno en cuestion y el hecho de que no puede reducirse a la meraestimacion de un fenomeno de resonancia.
En este caso, para el valor de los parametros iniciales, el caracter con que ocurre la bifurcacion deHopf es subcrıtico, lo cual nos indica que al sobrepasar la velocidad de flutter, la amplitud del LCOcrecera bruscamente y es mas probable que se produzca un fallo subito del sistema aeroelastico. Porotro lado, debido a la naturaleza subcrıtica de la Hopf, podrıan aparecer LCOs a velocidades menoresque la de flutter, lo que deberıa ser tomado en cuenta para el diseno aeroelastico del sistema.

4.3. MODELO NO ESTACIONARIO 53
4.3. Modelo no estacionario
4.3.1. Parametros y variables en AUTO7P
Para este modelo las variables seleccionadas ası como los valores iniciales se muestran en la tabla4.4, el resto de parametros esta fijado y se corresponden con los de la tabla 4.5.
4.3.2. Deteccion del punto de bifurcacion de Hopf
El programa detecta la aparicion de una bifurcacion de Hopf, indicada mediante la etiqueta HB,para un valor de la velocidad de U ≈ 10.9019497 m/s, la cual coincide con la velocidad de flutter, Uf ,calculada anteriormente para el modelo no estacionario lineal.
En la figura 4.9 se muestra la norma, L2NORM , frente a la velocidad. Se observa que el punto debifurcacion esta en el valor de U comentado anteriormente y que la bifurcacion de Hopf es supercrıtica.
4.3.3. Posibles degeneraciones. Caracter subcrıtico y supercrıtico
Como vamos a ver a continuacion, en el modelo no estacionario encontramos una dinamica masrica desde el punto de vista de las bifurcaciones. En particular, en este caso ademas del equilibrioen el origen que existe siempre, para ciertos valores de los parametros, tambien aparecen equilibriosno triviales, que tambien experimentan bifurcaciones de Hopf y que en determinadas circunstanciasinteraccionan entre sı. El hecho de que existan equilibrios no triviales significa que hay configuracio-nes del sistema aeroelastico en las que los grados de libertad son distintos de cero y, sin embargo, elsistema se encuentra en situacion de equilibrio.
En la figura 4.10 representamos el diagrama de bifurcaciones al mover el parametro kα0. Obser-
vamos que el equilibrio en el origen experimenta no solo una bifurcacion de Hopf (etiqueta 2) sinoque tambien una bifurcacion transcrıtica (etiqueta 3). Vemos como ese equilibrio no trivial experi-menta tres bifurcaciones de Hopf (etiquetas 5, 6 y 10) y una bifurcacion silla-nodo (etiqueta 7) dela que surge un nuevo equilibrio no trivial que tambien experimenta otra bifurcacion Hopf (etiqueta 8).
AUTO7P Param. fısico Unidades Valor inicial Lımites1 U [m/s] 0 ≥ 02 a [-] -0.5 [−1, 1]3 ch [kg/s] 0.11 ≥ 04 cα [kg m2/s] 0.115 ≥ 05 xα [-] 0.5 [−1, 1]6 ρ [kg/m3] 1.204 [0.01, 1.5]7 kα0 [N/m] 0.942 ≥ 08 kh0
[N/m] 895.10 ≥ 09 kα1
[N/m] 3.95 ≥ 010 kα2 [N/m] 15 ≥ 0
Tabla 4.4: Valores iniciales de los parametros variables de AUTO7P.
Parametro ValorΛ [m] 0.6b [m] 0.0325mw [kg] 1.0662mT [kg] 3.836Iα [kg m2] 0.0004438
Tabla 4.5: Valores parametros que permanecen constantes.

54 CAPITULO 4. CONTINUACION NUMERICA
Figura 4.9: Amplitud del LCO en funcion de la velocidad flutter.
Figura 4.10: Diagrama de bifurcaciones de x1/α.
La continuacion de esas bifurcaciones de Hopf en el plano U -kα0se detalla mas adelante en la
figura 4.11.
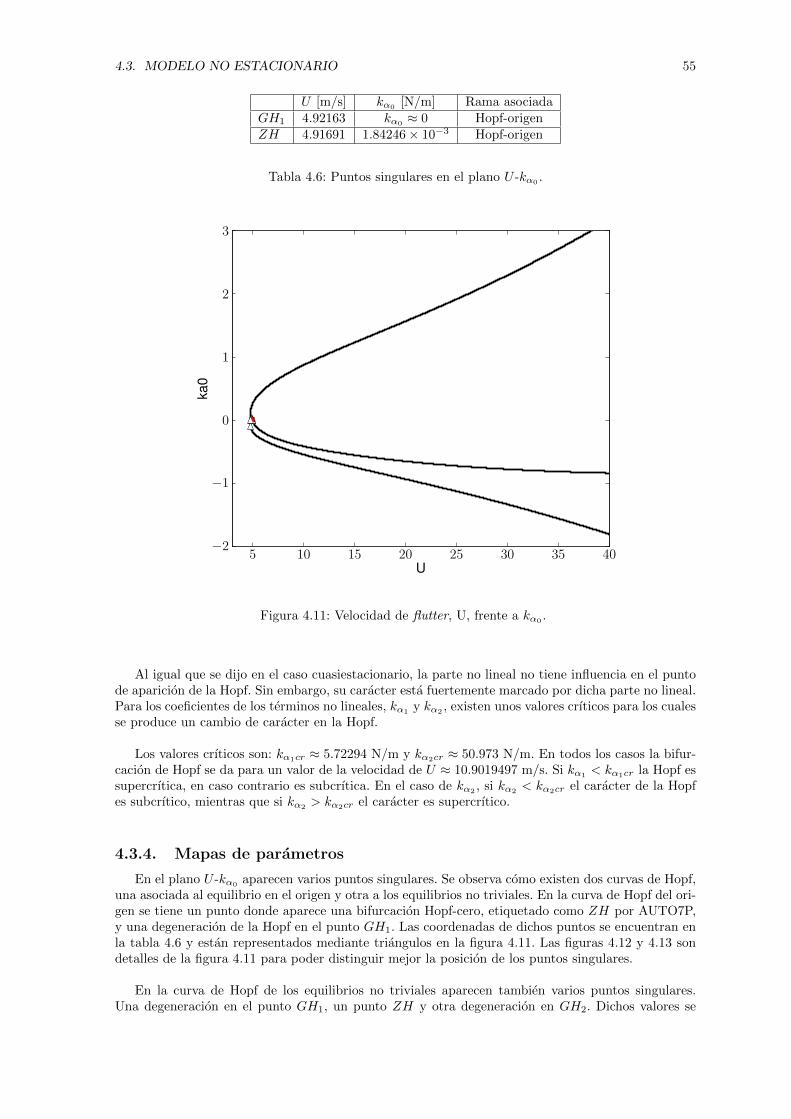
4.3. MODELO NO ESTACIONARIO 55
U [m/s] kα0[N/m] Rama asociada
GH1 4.92163 kα0≈ 0 Hopf-origen
ZH 4.91691 1.84246× 10−3 Hopf-origen
Tabla 4.6: Puntos singulares en el plano U -kα0 .
Figura 4.11: Velocidad de flutter, U, frente a kα0 .
Al igual que se dijo en el caso cuasiestacionario, la parte no lineal no tiene influencia en el puntode aparicion de la Hopf. Sin embargo, su caracter esta fuertemente marcado por dicha parte no lineal.Para los coeficientes de los terminos no lineales, kα1 y kα2 , existen unos valores crıticos para los cualesse produce un cambio de caracter en la Hopf.
Los valores crıticos son: kα1cr ≈ 5.72294 N/m y kα2cr ≈ 50.973 N/m. En todos los casos la bifur-cacion de Hopf se da para un valor de la velocidad de U ≈ 10.9019497 m/s. Si kα1
< kα1cr la Hopf essupercrıtica, en caso contrario es subcrıtica. En el caso de kα2 , si kα2 < kα2cr el caracter de la Hopfes subcrıtico, mientras que si kα2 > kα2cr el caracter es supercrıtico.
4.3.4. Mapas de parametros
En el plano U -kα0 aparecen varios puntos singulares. Se observa como existen dos curvas de Hopf,una asociada al equilibrio en el origen y otra a los equilibrios no triviales. En la curva de Hopf del ori-gen se tiene un punto donde aparece una bifurcacion Hopf-cero, etiquetado como ZH por AUTO7P,y una degeneracion de la Hopf en el punto GH1. Las coordenadas de dichos puntos se encuentran enla tabla 4.6 y estan representados mediante triangulos en la figura 4.11. Las figuras 4.12 y 4.13 sondetalles de la figura 4.11 para poder distinguir mejor la posicion de los puntos singulares.
En la curva de Hopf de los equilibrios no triviales aparecen tambien varios puntos singulares.Una degeneracion en el punto GH1, un punto ZH y otra degeneracion en GH2. Dichos valores se

56 CAPITULO 4. CONTINUACION NUMERICA
Figura 4.12: Detalle del mapa U frente a kα0de la figura 4.11 (I).
Figura 4.13: Detalle del mapa U frente a kα0de la figura 4.11 (II).

4.3. MODELO NO ESTACIONARIO 57
U [m/s] kα0[N/m] Rama asociada
GH1 4.93870 6.674194× 10−3 Hopf-NTZH 4.92163 3.64544× 10−2 Hopf-NTGH2 4.78284 4.62018× 10−3 Hopf-NT
Tabla 4.7: Puntos singulares en el plano U -kα0.
U [m/s] a [-] Rama asociadaGH1 5.04675 -0.612129 Hopf-NTGH2 5.48818 -0.646367 InterseccionGH3 4.37313 -0.29585 Hopf-NTGH4 7.172371 -0.986204 Hopf-origenBP 5.49476 -0.647333 Hopf-NTZH 6.14918 -0.738614 Hopf-NT
Tabla 4.8: Puntos singulares en el plano U -a.
encuentran en la tabla 4.7. Como puede observarse en dicha tabla y en la figura 4.14, todos los puntossingulares se concentran en las proximidades de kα0 ≈ 0 y son muy cercanos entre sı, lo cual dificultasu interpretacion en el entorno de dicho punto.
Se toma un valor de kα0= 3.554× 10−4.
En la figura 4.16 que representa el plano U -a, se observan varias curvas. Una de ellas esta asociadacon la Hopf del equilibrio en el origen (HopfOri) y la otra con la Hopf de los equilibrios no triviales(HopfNT).
La Hopf del origen presenta dos degeneraciones en los puntos etiquetados como GH2 y GH4
en la tabla 4.8. En la figura 4.15 se observa que en el punto GH2 se cortan las curvas de Hopfdel origen y de Hopf de los equilibrios no triviales, aparece una degeneracion de la Hopf llamadaHopf-cero transcrıtica y un punto silla-nodo etiquetado como BP. El caracter de la Hopf del origenes subcrıtico si a > aGH2
, supercrıtico si aGH2> a > aGH4
y vuelve a ser subcrıtico cuando a < aGH4.
El comportamiento para la Hopf de los equilibrios no triviales es mas complejo. Observemos lafigura 4.16 y los valores de la tabla 4.8. Aparecen tres degeneraciones de la Hopf en los puntos GH1,GH2 y GH3 y un punto cero-Hopf ZH. Se producen cinco cambios de caracter. En los puntos de lacurva 4.16 a la izquierda de GH3 el caracter de la Hopf es subcrıtico, entre GH3 y GH2 supercrıtico,entre GH2 y ZH subcrıtico, entre ZH y GH1 supercrıtico y a partir de GH1 los puntos de la curvarepresentan la aparicion de bifurcaciones de Hopf subcrıticas.
En el plano U -cα tenemos una degeneracion en el punto GH (U ≈ 15.1130m/s, cα ≈ 3.00667 ×10−3kg m2/s), siendo supercrıtica la Hopf para el caso cα > cαGH y subcrıtica en caso contrario.
En el plano a-ch se observa una bifurcacion de tipo cero-Hopf en el punto a = 0.49190, ch = 6.1286kg/s.
4.3.5. Comparacion modelo lineal
Tanto el modelo lineal como el no lineal en el caso no estacionario predicen, al igual que pasabaen el modelo cuasiestacionario, la misma velocidad de flutter, pero como se dijo antes, el modelo nolineal es mucho mas rico en informacion y prediccion que el lineal.
Al igual que se comento en el caso cuasiestacionario, el modelo lineal es mas pobre desde el puntode vista de la informacion que aporta. El mecanismo que lleva a la aparicion del flutter en el modelolineal es mas sencillo e intuitivo que en el caso del modelo no lineal y por tanto se encuentra altamenteextendido su uso para una primera prediccion del flutter.
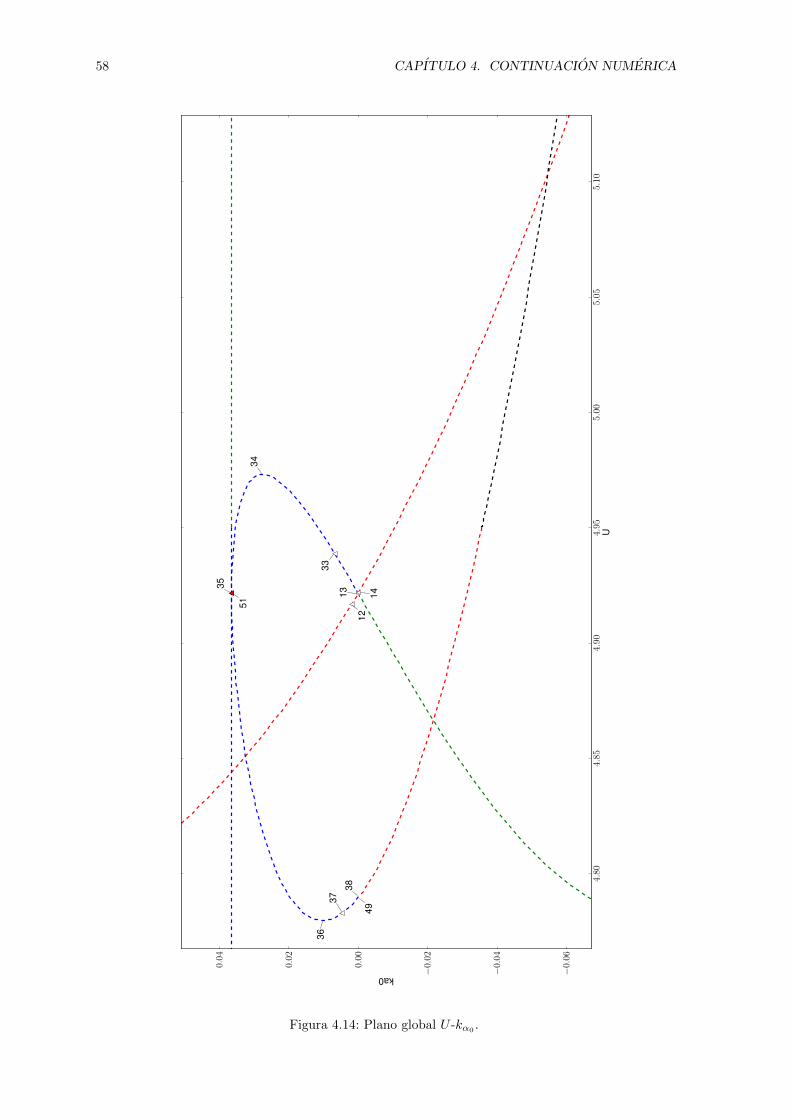
58 CAPITULO 4. CONTINUACION NUMERICA
Figura 4.14: Plano global U -kα0.

4.3. MODELO NO ESTACIONARIO 59
Figura 4.15: Curva de Hopf del origen en el plano U -a.
Figura 4.16: Curva de Hopf de los equilibrios no triviales en el plano U -a.

60 CAPITULO 4. CONTINUACION NUMERICA
Figura 4.17: Detalle del plano U -a (I).
Figura 4.18: Detalle del plano U -a (II).

4.3. MODELO NO ESTACIONARIO 61
Figura 4.19: Plano U -cα.
Figura 4.20: Plano a-ch.

62 CAPITULO 4. CONTINUACION NUMERICA
Figura 4.21: Detalle del plano a-ch.
Figura 4.22: Plano U -ρ.

4.4. MODELO CON EFECTO DE PERDIDA I 63
AUTO7P Param. fısico Unidades Valor inicial Lımites1 U [m/s] 0 ≥ 02 a [-] -0.5 [−1, 1]3 ch [kg/s] 0.11 ≥ 04 cα [kg m2/s] 0.115 ≥ 05 xα [-] 0.5 [−1, 1]6 ρ [kg/m3] 1.204 [0.01, 1.5]7 kα0
[N/m] 0.942 ≥ 08 kh0 [N/m] 895.10 ≥ 09 kα1
[N/m] 3.95 ≥ 010 kα2
[N/m] 15 ≥ 0
Tabla 4.9: Valores iniciales de los parametros variables de AUTO7P.
Parametro ValorΛ [m] 0.6b [m] 0.0325mw [kg] 1.0662mT [kg] 3.836Iα [kg m2] 0.0004438
Tabla 4.10: Valores parametros que permanecen constantes.
En este caso, para el valor de los parametros iniciales, el caracter de la bifurcacion de Hopf essupercrıtico, lo cual nos indica que, al sobrepasar la velocidad de flutter, la amplitud del LCO crecerapaulatinamente y, por tanto, con los medios de control adecuados se podrıa revertir el fenomeno. Lasdiscrepancias entre el modelo cuasiestacionario y el no estacionario se comentaran mas adelante.
4.4. Modelo con efecto de perdida I
4.4.1. Parametros y variables en AUTO7P
Para este modelo las variables seleccionadas ası como los valores iniciales se muestran en la tabla4.9, el resto de parametros esta fijado y se corresponden con los de la tabla 4.10.
4.4.2. Deteccion del punto de bifurcacion de Hopf
El programa detecta la aparicion de una bifurcacion de Hopf, indicada mediante la etiqueta HB,para un valor de la velocidad de U ≈ 14.7579m/s, la cual coincide con la velocidad de flutter, Uf . Eneste modelo, en el cual se tiene en cuenta el efecto de la entrada en perdida del perfil, aparecen nolinealidades debidas tanto al termino aerodinamico como a la rigidez.
4.4.3. Posibles degeneraciones. Caracter subcrıtico y supercrıtico
La bifurcacion de Hopf es subcrıtica para los valores de los parametros dados inicialmente, si bien,aparecen degeneraciones en la dinamica del sistema para ciertos valores de los parametros.
Se observa que existe un valor crıtico del parametro kα2cren el que se produce un cambio en el
caracter de la Hopf. En este caso kα2cr≈ 28.6823. Si kα2
< kα2crla Hopf es subcrıtica, mientras que
si kα2 > kα2cr es supercrıtica.
4.4.4. Mapas de parametros
En el plano U -a, para el rango de a que se trabaja, no aparece ninguna degeneracion de la Hopf,por tanto el caracter de esta es subcrıtico para cualquier valor del parametro a manteniendo el resto

64 CAPITULO 4. CONTINUACION NUMERICA
U [m/s] kα0[N/m]
GH1 4.37751 5.94722× 10−2
GH2 5.74423 0.364158BP 4.37758 ≈ 0
Tabla 4.11: Puntos singulares en el plano U -kα0.
Figura 4.23: U frente a la norma.
de parametros constantes.
En el plano U -kα0 aparecen varios puntos singulares que se resumen en la tabla 4.11. El punto deHopf calculado se situa a la derecha de GH2 y el caracter de la Hopf es, como se dijo, subcrıtico. EntreGH1 y GH2 el caracter de la Hopf es supercrıtico y en los puntos de la curva con kα0
< kα0(GH2) el
caracter sera subcrıtico.
En el plano U -ch aparece una degeneracion GH en el punto U ≈ 22.7648 m/s, ch =≈ 26.9271kg/s. A la izquierda de GH la Hopf es subcrıtica mientras que a la derecha es supercrıtica.
En el plano U -cα existe una degeneracion GH en el punto U ≈ 20.8041 m/s, cα ≈ 2.84287× 10−3
kg m2/s, por lo que el caracter de la bifurcacion de Hopf es practicamente subcrıtico para la totalidadde valores de cα.
Se escoge un valor de ch = 30 kg/s, que esta por encima del punto de degeneracion del plano U -chcon la pretension de estudiar si aparecen degeneraciones en otros mapas parametricos. En efecto, seobserva la aparicion de puntos singulares que se pasan a comentar a continuacion.
Con dicho valor de ch el punto de la Hopf se desplaza a U ≈ 22.9620 m/s y dicha bifurcacion essupercrıtica. En la figura 4.23 se muestra la norma euclıdea de los equilibrios frente a la velocidad deinicio de la Hopf o velocidad de flutter. La figura 4.24 muestra un detalle de 4.23.

4.4. MODELO CON EFECTO DE PERDIDA I 65
Figura 4.24: Detalle segunda Hopf.
En en plano U -a aparece una degeneracion el punto GH con coordenadas UGH ≈ 24.2145 m/sy aGH ≈ −0.519284. El caracter sera subcrıtico si a < aGH y supercrıtico en caso contrario. Dichoplano se muestra en la figura 4.25 donde el triangulo representa el punto GH.
En el plano U -cα encontramos un degeneracion, GH, en el punto U ≈ 23.0595 m/s, cα ≈ 0.0120517kg m2/s. El caracter de la Hopf es subcrıtico para valores de cα mayores al del punto de degeneraciony supercrıtico para valores menores que dicho punto. En la figura 4.26 se muestra el plano U -cα.
En el plano U -ρ aparece una unica degeneracion en el punto U ≈ 35.6871 y ρ ≈ 0.47183 como semuestra en la figura 4.27. El caracter de la Hopf sera subcrıtico para valores de ρ superiores al delpunto singular y supercrıtico en caso contrario.
4.4.5. Coexistencia de orbitas periodicas
Parece interesante comentar en este punto la coexistencia de dos orbitas periodicas para una mis-ma velocidad. Esto ocurre ası debido al caracter subcrıtico de la bifurcacion de Hopf, que permiteque para una unica velocidad aparezcan distintas orbitas de diferente amplitud.
En la figura 4.28 se muestran dos orbitas periodicas coexistentes, la que esta marcada con un 1corresponderıa a una orbita periodica estable, mientras que la que esta marcada con un 2 tendrıacaracter inestable. Entrevemos ası la complejidad del fenomeno de flutter. Las variables que apare-cen son los grados de libertad del sistema aeroelastico pero con la notacion usada en AUTO7P. Lacorrespondencia serıa x1 = α y x3 = h.

66 CAPITULO 4. CONTINUACION NUMERICA
Figura 4.25: Plano U -a.
Figura 4.26: Plano U -cα.

4.4. MODELO CON EFECTO DE PERDIDA I 67
Figura 4.27: Plano U -ρ.
Figura 4.28: Coexistencia de dos orbitas periodicas.

68 CAPITULO 4. CONTINUACION NUMERICA
AUTO7P Param. fısico Unidades Valor inicial Lımites1 U [m/s] 0.01 ≥ 02 a [-] -0.66 [−1, 1]3 ch [kg/s] 27.43 ≥ 04 cα [kg m2/s] 0.036 ≥ 05 xα [-] 0.331 [−1, 1]6 ρ [kg/m3] 1.204 [0.01, 1.5]7 kα0
[N/m] 6.833 ≥ 08 kh0 [N/m] 2844.4 ≥ 09 kα1
[N/m] 3.95 ≥ 010 kα2
[N/m] 15 ≥ 0
Tabla 4.12: Valores iniciales de los parametros variables de AUTO7P.
Parametro ValorΛ [m] 0.6b [m] 0.135mw [kg] 2.049mT [kg] 12.3870Iα [kg m2] 0.00557757
Tabla 4.13: Valores parametros que permanecen constantes.
4.5. Modelo con efecto de perdida II
4.5.1. Parametros y variables en AUTO7P
Para este modelo las variables seleccionadas ası como los valores iniciales se muestran en la tabla4.12, el resto de parametros esta fijado y se corresponden con los de la tabla 4.13.
4.5.2. Deteccion del punto de bifurcacion de Hopf
El programa detecta la aparicion de dos bifurcaciones de Hopf, indicadas mediante las etiquetasHB1 y HB2, para unos valores de la velocidad de U1 ≈ 9.11986 m/s y U2 ≈ 41.6149 m/s. Se puedeapreciar dicho comportamiento en las figuras 4.29 y 4.30 que representan la norma frente a la veloci-dad.
Desde el punto de vista del calculo del flutter nos interesa el nacimiento de la primera Hopf y lavelocidad a la que se produce, la cual coincide con la velocidad de flutter, Uf . En este modelo, en elcual se tiene en cuenta el efecto de la entrada en perdida del perfil, aparecen no linealidades debidastanto al termino aerodinamico como a la rigidez.
Es muy interesante el hecho de que aparezca una segunda bifurcacion de Hopf que, aunque fısica-mente no llegarıa a producirse, nos hace entrever la complejidad que esconde la dinamica del sistema.
4.5.3. Coexistencia de orbitas periodicas
En las figuras 4.31 y 4.32 se muestran los planos de los maximos valores de α(x1) y h(x3) durantelos ciclos de oscilacion frente a la velocidad.
En la figura 4.33 se muestran dos orbitas periodicas coexistentes, la que esta marcada con un 1corresponderıa a una orbita periodica estable, mientras que la que esta marcada con un 2 tendrıacaracter inestable.

4.5. MODELO CON EFECTO DE PERDIDA II 69
Figura 4.29: Velocidad U frente a la norma L2NORM .
Figura 4.30: Plano U -L2NORM , rama HB2.

70 CAPITULO 4. CONTINUACION NUMERICA
Figura 4.31: Plano U -Max(α).
Figura 4.32: Plano U -Max(h).

4.5. MODELO CON EFECTO DE PERDIDA II 71
Figura 4.33: Plano U -L2NORM , rama HB2.
U [m/s] kα0 [N/m]GH1 9.66431 6.16555GH2 32.5622 12.2013
Tabla 4.14: Degeneraciones en el plano U -kα0.
4.5.4. Posibles degeneraciones. Caracter subcrıtico y supercrıtico
Se encuentra un valor crıtico del parametro kα2que establece la frontera entre el caracter subcrıtico
o supercrıtico de la Hopf. El valor crıtico hallado es kα2c≈ 1.13083 N/m, teniendo que si kα2
< kα2c
la Hopf es supercrıtica y si kα2> kα2c
es subcrıtica. Aparecen varias degeneraciones de la Hopfen los distintos mapas parametricos que sera importante analizar para determinar el caracter de labifurcacion.
4.5.5. Mapas de parametros
En el plano U -kα0 aparecen dos degeneraciones de la Hopf en los puntos GH1 y GH2 cuyas coorde-nadas se encuentran en la tabla 4.14. Dichos puntos aparecen representados en la figura 4.34 mediantedos triangulos, que separan las zonas con caracter subcrıtico de aquellas con caracter supercrıtico. Elcaracter de la Hopf dependera de la zona de la curva en la que estemos situados. En el trozo de curvaque une los dos triangulos el caracter de la Hopf sera supercrıtico y en los otros dos tramos subcrıtico.
En el plano U -cα aparecen tres degeneraciones en los puntos GH1, GH2 y GH3 de la tabla 4.15.En el plano U -a, representado en las figuras 4.35 y 4.36 se observan dos curvas distintas. Una de ellasesta asociada a la Hopf del origen, es decir, de equilibrio trivial, mientras que la otra esta asociada ala Hopf de los equilibrios no triviales.
La tabla 4.16 contiene todos los puntos singulares del plano U -a. Los puntos GH5 y ZH noaparecen representados ya que por conveniencia se ha optado por representar entre los lımites de aque tienen sentido fısico, es decir, a ∈ [−1, 1]. Los puntos GH se representan mediantes triangulos

72 CAPITULO 4. CONTINUACION NUMERICA
Figura 4.34: Plano U -kα0 .
U [m/s] cα [kg m2/s]GH1 8.27556 1.49053× 10−3
GH2 8.74363 1.78485× 10−2
GH3 43.9616 0.69294
Tabla 4.15: Degeneraciones en el plano U -cα.
U [m/s] a [-] Rama asociadaGH1 9.56391 -0.626568 Hopf-origenGH2 13.5870 -0.454792 Hopf-origenGH3 25.6923 -0.446190 Hopf-origenGH4 19.3493 -0.335057 Hopf-NTGH5 11.0881 -1.07318 Hopf-origenBP 33.0583 -0.455427 InterseccionZH 5.3747 4.68822 Hopf-NT
Tabla 4.16: Puntos singulares en el plano U -a.
mientras que el punto BP se indica mediante un cuadrado.
En el trozo de curva inferior que aparece en la figura 4.35 la Hopf es supercrıtica. En el trozo decurva a la izquierda de GH1, que pertenece a la misma rama que la anterior, la Hopf es subcrıtica,cambiando al atravesar GH1 a supercrıtica y del mismo modo a subcrıtica al atravesar GH3. En lacurva superior, asociada a la Hopf de los equilibrios no triviales, el tramo entre el punto BP y GH4
tiene caracter supercrıtico, volviendose subcrıtico a la izquierda de GH4.
Conviene hacer varios comentarios respecto a este plano. En el tramo de curva a la derecha delpunto BP las orbitas periodicas que aparecen, aunque la Hopf es supercrıtica, no son completamenteestables, ya que el equilibrio del cual nacen no es completamente estable. Por otro lado se darıa laaparicion de una bifurcacion de tipo Hopf-Hopf en el punto ZH de la rama de la curva de Hopf delos equilibrios no triviales. Dicho punto queda fuera del intervalo en el cual a tiene sentido fısico y,

4.5. MODELO CON EFECTO DE PERDIDA II 73
Figura 4.35: Plano U -a.
Figura 4.36: Detalle del plano U -a.
por tanto, en la practica, no llegarıa a producirse el fenomeno, si bien resulta muy interesante desdeel punto de vista matematico.
En el plano U -ρ, representado en la figura 4.37, aparecen dos degeneraciones, una en la curvade Hopf del origen y otra en la curva de Hopf de los equilibrios no triviales. En ambos casos dichadegeneracion se encuentra en el punto GH cambiando el caracter de la bifurcacion de subcrıtico asupercrıtico si nos movemos en sentido de velocidad creciente. La figura 4.38 muestra unicamente la

74 CAPITULO 4. CONTINUACION NUMERICA
Figura 4.37: Plano U -ρ. Ramas del origen y de los equilibrios no triviales.
Figura 4.38: Plano U -ρ. Rama del origen.
U [m/s] ρ [kg/m3] Altitud(ISA) [m]GH 12.7949 0.593779 6940
Tabla 4.17: Degeneracion en el plano U -ρ de la Hopf del origen.
rama de la curva de Hopf asociada al equilibrio en el origen.
En el plano U -xα aparece una degeneracion en el punto U ≈ 9.45973, xα ≈ 0.270103.

Conclusiones
Posibles lıneas futuras de investigacion
Debido a la riqueza que nos ofrece la dinamica de los sistemas aeroelasticos son muchas las lıneasde investigacion abiertas y las perspectivas desde las que se puede abordar el problema.
Resulta especialmente interesante la lınea abierta recientemente por autores como Luca Pigolotti[18] del CRIACIV (Centro de Investigacion Interuniversitario de Aerodinamica de la Construccione Ingenierıa del Viento). Se propone que en el caso de flutter podrıa darse una suerte de Paradojade Ziegler. Dicho trabajo sobrepasa el humilde proposito de este proyecto; si bien, serıa mas queinteresante investigar en esa lınea el efecto desestabilizador que podrıa tener el amortiguamiento enla aparicion de flutter y en las oscilaciones consecuencia de este.
Por otro lado, serıa muy interesante tambien extender el trabajo aquı realizado a modelos estruc-turales tridimensionales, es decir, dar el paso natural del estudio del perfil bidimensional al estudio delala y por tanto contemplar tanto la influencia de la finitud del ala y su torsion geometrica como la in-terferencia entre perfiles. En la figura 4.39 se muestra un ejemplo de modelo tridimensional de semiala.
Figura 4.39: Modelo tridimensional de semiala.
75
76 CAPITULO 4. CONTINUACION NUMERICA
Conclusiones finales
Los distintos modelos que se han utilizado para el estudio y la comprension del fenomeno de flutterarrojan en algunos casos predicciones bastante distintas. Por ejemplo los modelos cuasiestacionarioy no estacionario usados, dan valores de la velocidad y frecuencia de flutter bastante distintos. Ladiferencia estriba principalmente en la consideracion o no de la influencia de los torbellinos de laestela. El efecto de estos se trato de manera sucinta en la seccion 3.4.
Por otro lado podemos ver como el considerar la no estacionariedad del sistema puede inclusoestabilizarlo. Nos referimos, por ejemplo, a que en el caso cuasiestacionario el caracter de la Hopf,para los valores de los parametros utilizados, es subcrıtico, mientras que haciendo uso del modelo noestacionario encontrabamos que la Hopf era supercrıtica. Esto nos indicarıa que los torbellinos de laestela podrıan tener en las inmediaciones del punto de Hopf una gran influencia en el caracter de esta.
De acuerdo con la literatura consultada y usada de referencia (ver [2]) los experimentos realizadosparecen indicar que el modelo que predice con mayor aproximacion el fenomeno de flutter es el noestacionario. Sin embargo, hay que tener mucho cuidado con esta afirmacion ya que las condicionesbajo las que se ha realizado el experimento son muy especıficas y no pueden extenderse a la totalidadde un fenomeno tan complejo.
El modelo de stall flutter usado, tomado de [1] y [13] entre otros, es quizas el que peor comporta-miento ha presentado. Los resultados que precide se ajustan a los valores parametricos de los artıculoscitados, pero entran en serias discordancias con otros modelos cuando usamos otros parametros dis-tintos. Sin embargo, aporta informacion bastante interesante acerca del comportamiento del sistemacuando se produce flutter en presencia o riesgo de entrada en perdida del perfil aerodinamico.
El modelo aerodinamico que usa es bastante realista, o al menos lo pretende, ya que contemplaalgunos efectos no estacionarios y las limitaciones del sistema por la entrada en perdida. Es cierto,que las interacciones fluido-estructura en caso de entrada en perdida son mucho mas complejas, yaltamente no estacionarias, que en el caso de una aerodinamica lineal y, es por ello, que puede disonarsignificativamente con el comportamiento de flutter clasico. Ejemplo de ello es la deteccion de dosbifurcaciones de Hopf para distintas velocidades que se da en uno de los modelos estudiados, de modoque la mayor complejidad del fenomeno es evidente.
Concluimos, por un lado, que las diferencias entre los modelos no lineales y los lineales no estribanen que arrojen predicciones distintas del punto de inicio del flutter, sino que se fundamentan en que,mientras que los modelos lineales son muy limitados en cuanto a prediccion, los no lineales ofrecenuna informacion mucho mas amplia y detallada del fenomeno, no solo en el punto de flutter sinotambien posteriormente.
La riqueza que encontramos en el estudio mediante la continuacion numerica de equilibrios yde orbitas periodicas de los distintos modelos usados, no solo nos deja patente la complejidad delfenomeno en cuestion, sino que tambien nos abre un abanico de posibilidades en el diseno de sistemasaeroelasticos que queda muy lejos de lo que los modelos lineales pueden ofrecernos. Jugando con losmapas parametricos podemos, no solo retrasar la aparicion de flutter, sino incluso hacer que en casode que este aparezca, lo haga progresivamente y pueda revertirse su efecto.

Apendice A
Codigos programa AUTO7P
Modelo cuasiestacionario
!———————————————————————-!———————————————————————-! FlutterQS.f90 - Modelo cuasiestacionario! No linealidad en la rigidez!———————————————————————-!———————————————————————-
SUBROUTINE FUNC(NDIM,U,ICP,PAR,IJAC,F,DFDU,DFDP)!——————!Evaluates the algebraic equations or ODE right hand side
!Input arguments :! NDIM : Dimension of the algebraic or ODE system! U : State variables! ICP : Array indicating the free parameter(s)! PAR : Equation parameters
! Values to be returned :! F : Equation or ODE right hand side values
! Normally unused Jacobian arguments : IJAC, DFDU, DFDP
IMPLICIT NONEINTEGER, INTENT(IN) :: NDIM, IJAC, ICP(*)DOUBLE PRECISION, INTENT(IN) :: U(NDIM), PAR(*)DOUBLE PRECISION, INTENT(OUT) :: F(NDIM)DOUBLE PRECISION, INTENT(INOUT) :: DFDU(NDIM,NDIM),DFDP(NDIM,*)
DOUBLE PRECISION x1,x2,x3,x4,UU,aa,ch,ca,xa,bb,ka0,kh0,ka1,ka2DOUBLE PRECISION Ia,Mt,Mw,ro,cla,cma,Iag,Sag,Mtg,dp,IainvDOUBLE PRECISION Sainv,Mtinv,pi,pi2,aa05
!definicion de variablesx1 = U(1)x2 = U(2)x3 = U(3)x4 = U(4)
pi = 3.1415926535897932d0 !4*datan(1.0)pi2 = 2*pi
77
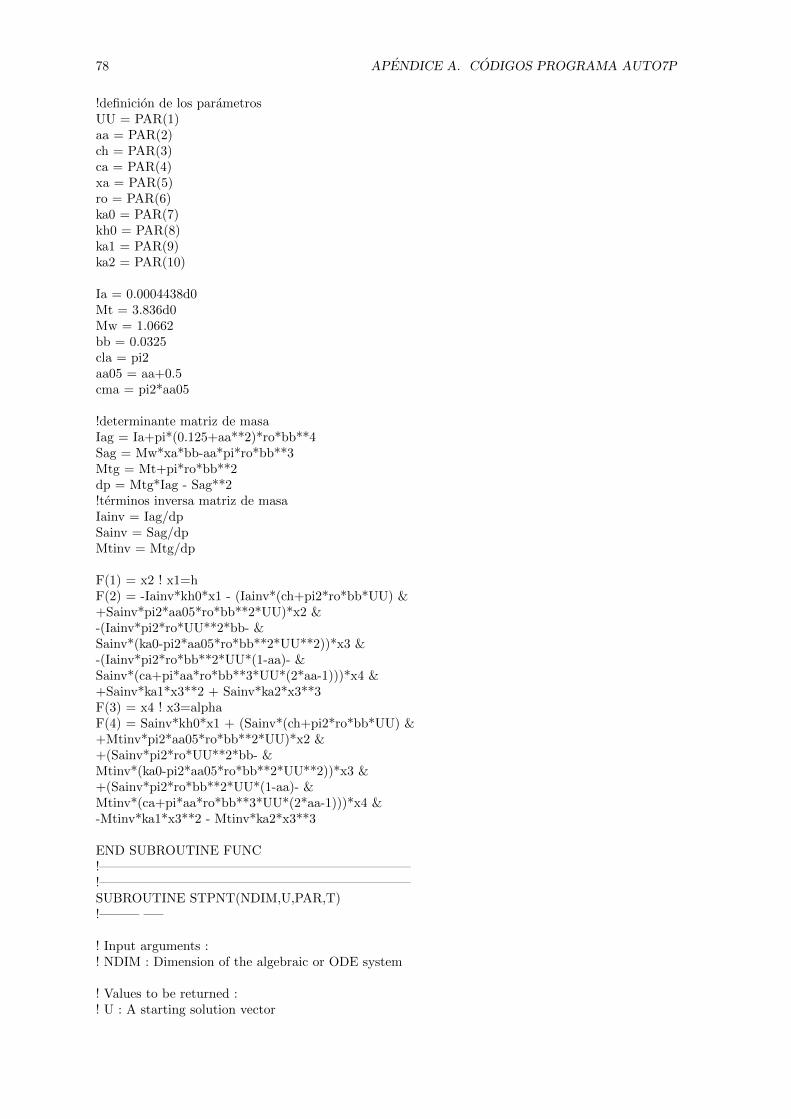
78 APENDICE A. CODIGOS PROGRAMA AUTO7P
!definicion de los parametrosUU = PAR(1)aa = PAR(2)ch = PAR(3)ca = PAR(4)xa = PAR(5)ro = PAR(6)ka0 = PAR(7)kh0 = PAR(8)ka1 = PAR(9)ka2 = PAR(10)
Ia = 0.0004438d0Mt = 3.836d0Mw = 1.0662bb = 0.0325cla = pi2aa05 = aa+0.5cma = pi2*aa05
!determinante matriz de masaIag = Ia+pi*(0.125+aa**2)*ro*bb**4Sag = Mw*xa*bb-aa*pi*ro*bb**3Mtg = Mt+pi*ro*bb**2dp = Mtg*Iag - Sag**2!terminos inversa matriz de masaIainv = Iag/dpSainv = Sag/dpMtinv = Mtg/dp
F(1) = x2 ! x1=hF(2) = -Iainv*kh0*x1 - (Iainv*(ch+pi2*ro*bb*UU) &+Sainv*pi2*aa05*ro*bb**2*UU)*x2 &-(Iainv*pi2*ro*UU**2*bb- &Sainv*(ka0-pi2*aa05*ro*bb**2*UU**2))*x3 &-(Iainv*pi2*ro*bb**2*UU*(1-aa)- &Sainv*(ca+pi*aa*ro*bb**3*UU*(2*aa-1)))*x4 &+Sainv*ka1*x3**2 + Sainv*ka2*x3**3F(3) = x4 ! x3=alphaF(4) = Sainv*kh0*x1 + (Sainv*(ch+pi2*ro*bb*UU) &+Mtinv*pi2*aa05*ro*bb**2*UU)*x2 &+(Sainv*pi2*ro*UU**2*bb- &Mtinv*(ka0-pi2*aa05*ro*bb**2*UU**2))*x3 &+(Sainv*pi2*ro*bb**2*UU*(1-aa)- &Mtinv*(ca+pi*aa*ro*bb**3*UU*(2*aa-1)))*x4 &-Mtinv*ka1*x3**2 - Mtinv*ka2*x3**3
END SUBROUTINE FUNC!———————————————————————–!———————————————————————–SUBROUTINE STPNT(NDIM,U,PAR,T)!——— —–
! Input arguments :! NDIM : Dimension of the algebraic or ODE system
! Values to be returned :! U : A starting solution vector
79
! PAR : The corresponding equation-parameter values
! Note : For time- or space-dependent solutions this subroutine has! the scalar input parameter T contains the varying time or space! variable value.
IMPLICIT NONEINTEGER, INTENT(IN) :: NDIMDOUBLE PRECISION, INTENT(INOUT) :: U(NDIM),PAR(*)DOUBLE PRECISION, INTENT(IN) :: T
! Initialize the equation parametersPAR(1) = 0. !UUPAR(2) = -0.5 !aaPAR(3) = 0.011 !chPAR(4) = 0.0115 !caPAR(5) = 0.5 !xaPAR(6) = 1.204 !roPAR(7) = 0.942 !ka0PAR(8) = 895.1 !kh0PAR(9) = 5.2 !ka1PAR(10) = 107 !ka2
! Initialize the solutionU(1) = 0.U(2) = 0.U(3) = 0.U(4) = 0.
END SUBROUTINE STPNT
!———————————————————————-!———————————————————————-
SUBROUTINE BCND(NDIM,PAR,ICP,NBC,U0,U1,FB,IJAC,DBC)!——— —-
! Boundary Conditions
! Input arguments :! NDIM : Dimension of the ODE system! PAR : Equation parameters! ICP : Array indicating the free parameter(s)! NBC : Number of boundary conditions! U0 : State variable values at the left boundary! U1 : State variable values at the right boundary
! Values to be returned :! FB : The values of the boundary condition functions
! Normally unused Jacobian arguments : IJAC, DBC (see manual)
IMPLICIT NONEINTEGER, INTENT(IN) :: NDIM, ICP(*), NBC, IJACDOUBLE PRECISION, INTENT(IN) :: PAR(*), U0(NDIM), U1(NDIM)DOUBLE PRECISION, INTENT(OUT) :: FB(NBC)DOUBLE PRECISION, INTENT(INOUT) :: DBC(NBC,*)

80 APENDICE A. CODIGOS PROGRAMA AUTO7P
!X FB(1)=!X FB(2)=
END SUBROUTINE BCND
!———————————————————————-!———————————————————————-
SUBROUTNE ICND(NDIM,PAR,ICP,NINT,U,UOLD,UDOT,UPOLD,FI,IJAC,DINT)!——— —-
! Integral Conditions
! Input arguments :! NDIM : Dimension of the ODE system! PAR : Equation parameters! ICP : Array indicating the free parameter(s)! NINT : Number of integral conditions! U : Value of the vector function U at ‘time’ t
! The following input arguments, which are normally not needed,! correspond to the preceding point on the solution branch! UOLD : The state vector at ’time’ t! UDOT : Derivative of UOLD with respect to arclength! UPOLD : Derivative of UOLD with respect to ‘time’
! Normally unused Jacobian arguments : IJAC, DINT
! Values to be returned :! FI : The value of the vector integrand
IMPLICIT NONEINTEGER, INTENT(IN) :: NDIM, ICP(*), NINT, IJACDOUBLE PRECISION, INTENT(IN) :: PAR(*)DOUBLE PRECISION, INTENT(IN) :: U(NDIM), UOLD(NDIM), UDOT(NDIM), UPOLD(NDIM)DOUBLE PRECISION, INTENT(OUT) :: FI(NINT)DOUBLE PRECISION, INTENT(INOUT) :: DINT(NINT,*)
!X FI(1)=
END SUBROUTINE ICND
!———————————————————————-!———————————————————————-
SUBROUTINE FOPT(NDIM,U,ICP,PAR,IJAC,FS,DFDU,DFDP)!——— —-!! Defines the objective function for algebraic optimization problems!! Supplied variables :! NDIM : Dimension of the state equation! U : The state vector! ICP : Indices of the control parameters! PAR : The vector of control parameters!! Values to be returned :! FS : The value of the objective function

81
!! Normally unused Jacobian argument : IJAC, DFDP
IMPLICIT NONEINTEGER, INTENT(IN) :: NDIM, ICP(*), IJACDOUBLE PRECISION, INTENT(IN) :: U(NDIM), PAR(*)DOUBLE PRECISION, INTENT(OUT) :: FSDOUBLE PRECISION, INTENT(INOUT) :: DFDU(NDIM),DFDP(*)
!X FS=
END SUBROUTINE FOPT
!———————————————————————-!———————————————————————-
SUBROUTINE PVLS(NDIM,U,PAR)!——— —-
IMPLICIT NONEINTEGER, INTENT(IN) :: NDIMDOUBLE PRECISION, INTENT(IN) :: U(NDIM)DOUBLE PRECISION, INTENT(INOUT) :: PAR(*)
!———————————————————————-! NOTE :! Parameters set in this subroutine should be considered as “solution! measures” and be used for output purposes only.!! They should never be used as ‘true” continuation parameters.!! They may, however, be added as “over-specified parameters” in the! parameter list associated with the AUTO-Constant NICP, in order to! print their values on the screen and in the “p.xxx file.!! They may also appear in the list associated with AUTO-Constant NUZR.!!———————————————————————-! For algebraic problems the argument U is, as usual, the state vector.! For differential equations the argument U represents the approximate! solution on the entire interval [0,1]. In this case its values must! be accessed indirectly by calls to GETP, as illustrated below.!———————————————————————-!! Set PAR(2) equal to the L2-norm of U(1)!X PAR(2)=GETP(’NRM’,1,U)!! Set PAR(3) equal to the minimum of U(2)!X PAR(3)=GETP(’MIN’,2,U)!! Set PAR(4) equal to the value of U(2) at the left boundary.!X PAR(4)=GETP(’BV0’,2,U)!! Set PAR(5) equal to the pseudo-arclength step size used.!X PAR(5)=GETP(’STP’,1,U)!!———————————————————————-! The first argument of GETP may be one of the following:

82 APENDICE A. CODIGOS PROGRAMA AUTO7P
! ’NRM’ (L2-norm), ’MAX’ (maximum),! ’INT’ (integral), ’BV0 (left boundary value),! ’MIN’ (minimum), ’BV1’ (right boundary value).!! Also available are! ’STP’ (Pseudo-arclength step size used).! ’FLD’ (‘Fold function’, which vanishes at folds).! ’BIF’ (‘Bifurcation function’, which vanishes at singular points).! ’HBF’ (‘Hopf function’; which vanishes at Hopf points).! ’SPB’ ( Function which vanishes at secondary periodic bifurcations).!———————————————————————-
END SUBROUTINE PVLS
!———————————————————————-!———————————————————————-
Modelo no estacionario
!———————————————————————-!———————————————————————-! NSFlutter.f90 - Modelo aerodinamico no estacionario! No linealidad en la rigidez!———————————————————————-!———————————————————————-SUBROUTINE FUNC(NDIM,U,ICP,PAR,IJAC,F,DFDU,DFDP)!——————!Evaluates the algebraic equations or ODE right hand side
!Input arguments :! NDIM : Dimension of the algebraic or ODE system! U : State variables! ICP : Array indicating the free parameter(s)! PAR : Equation parameters
! Values to be returned :! F : Equation or ODE right hand side values
! Normally unused Jacobian arguments : IJAC, DFDU, DFDP
IMPLICIT NONEINTEGER, INTENT(IN) :: NDIM, IJAC, ICP(*)DOUBLE PRECISION, INTENT(IN) :: U(NDIM), PAR(*)DOUBLE PRECISION, INTENT(OUT) :: F(NDIM)DOUBLE PRECISION, INTENT(INOUT) :: DFDU(NDIM,NDIM),DFDP(NDIM,*)
DOUBLE PRECISION x1,x2,x3,x4,x5,x6,UU,aa,ch,ca,xa,bb,ka0,kh0,ka1,ka2DOUBLE PRECISION Ia,Mt,Mw,ro,cla,cma,Iag,Sag,Mtg,dp,IainvDOUBLE PRECISION Sainv,Mtinv,pi,pi2,aa05,c0,c1,c2,c3,c4,fi,tau,ji
!definicion de variablesx1 = U(1)x2 = U(2)x3 = U(3)x4 = U(4)x5 = U(5)
83
x6 = U(6)
pi = 3.1415926535897932d0 !4*datan(1.0)pi2 = 2*pi
!definicion de los parametrosUU = PAR(1)aa = PAR(2)ch = PAR(3)ca = PAR(4)xa = PAR(5)ro = PAR(6)ka0 = PAR(7)kh0 = PAR(8)ka1 = PAR(9)ka2 = PAR(10)
Ia = 0.0004438d0Mt = 3.836d0Mw = 1.0662bb = 0.0325cla = pi2aa05 = aa+0.5cma = pi2*aa05
!parametros modelo no estacionarioc0 = 1c1 = 0.165c2 = 0.0455c3 = 0.335c4 = 0.3fi = c0-c1-c3tau = c1*c2+c3*c4ji = c2*c4*(c1+c3)
!determinante matriz de masaIag = Ia+pi*(0.125+aa**2)*ro*bb**4Sag = Mw*xa*bb-aa*pi*ro*bb**3Mtg = Mt+pi*ro*bb**2dp = Mtg*Iag - Sag**2
!terminos inversa matriz de masaIainv = Iag/dpSainv = Sag/dpMtinv = Mtg/dp
F(1) = x2 ! x1=hF(2) = -Iainv*kh0*x1 - (Iainv*(ch+pi2*ro*bb*UU*fi) &+Sainv*pi2*aa05*ro*bb**2*UU*fi)*x2 &-(Iainv*pi2*ro*UU**2*bb*fi- &Sainv*(ka0-pi2*aa05*ro*bb**2*UU**2*fi))*x3 &-(Iainv*pi*ro*bb**2*UU*(1+fi*(1-2*aa))- &Sainv*(ca+pi*(0.5-aa)*ro*bb**3*UU*(1-fi*(1+2*aa))))*x4 &-(Iainv*pi2*ro*UU**3*ji &+Sainv*pi2*ro*bb*UU**3*aa05*ji)*x5 &-(Iainv*pi2*ro*UU**2*bb*tau+ &Sainv*pi2*ro*bb**2*UU**2*tau*aa05)*x6 &+Sainv*ka1*x3**2 + Sainv*ka2*x3**3
84 APENDICE A. CODIGOS PROGRAMA AUTO7P
F(3) = x4 ! x3=alphaF(4) = Sainv*kh0*x1 + (Sainv*(ch+pi2*ro*bb*UU*fi) &+Mtinv*pi2*aa05*ro*bb**2*UU*fi)*x2 &+(Sainv*pi2*ro*UU**2*bb*fi- &Mtinv*(ka0-pi2*aa05*ro*bb**2*UU**2*fi))*x3 &+(Sainv*pi*ro*bb**2*UU*(1+fi*(1-2*aa))- &Mtinv*(ca+pi*(0.5-aa)*ro*bb**3*UU*(1-fi*(1+2*aa))))*x4 &+(Sainv*pi2*ro*UU**3*ji+ &Mtinv*pi2*ro*bb*UU**3*aa05*ji)*x5 &-(-Sainv*pi2*ro*UU**2*bb*tau+ &Mtinv*pi2*ro*bb**2*UU**2*tau*aa05)*x6 &-Mtinv*ka1*x3**2 - Mtinv*ka2*x3**3F(5) = x6 ! x5=xbarraF(6) = 1/bb*x2 + UU/bb*x3 + (0.5-aa)*x4 - &c2*c4*UU**2/bb**2*x5 - (c2+c4)*UU/bb*x6
END SUBROUTINE FUNC
Modelo no lineal con efecto de entrada en perdida
!———————————————————————-!———————————————————————-! StallFlutter.f90 - Modelo stall flutter! No linealidad en aerodinamica y rigidez!———————————————————————-!———————————————————————-
SUBROUTINE FUNC(NDIM,U,ICP,PAR,IJAC,F,DFDU,DFDP)!——————!Evaluates the algebraic equations or ODE right hand side
!Input arguments :! NDIM : Dimension of the algebraic or ODE system! U : State variables! ICP : Array indicating the free parameter(s)! PAR : Equation parameters
! Values to be returned :! F : Equation or ODE right hand side values
! Normally unused Jacobian arguments : IJAC, DFDU, DFDP
IMPLICIT NONEINTEGER, INTENT(IN) :: NDIM, IJAC, ICP(*)DOUBLE PRECISION, INTENT(IN) :: U(NDIM), PAR(*)DOUBLE PRECISION, INTENT(OUT) :: F(NDIM)DOUBLE PRECISION, INTENT(INOUT) :: DFDU(NDIM,NDIM),DFDP(NDIM,*)
DOUBLE PRECISION x1,x2,x3,x4,UU,aa,ch,ca,xa,bb,ka0,kh0,ka1,ka2DOUBLE PRECISION Ia,Mt,Mw,ro,cla,cma,Sa,d,pi,pi2,aa05,c1,d1,c2DOUBLE PRECISION d2,c3,d3,c4,d4,k1,k2,gnl1,gnl2,cs,kh2,n1a,n1h,n2a,n2h
!definicion de variablesx1 = U(1)x2 = U(2)x3 = U(3)

85
x4 = U(4)
pi = 3.1415926535897932d0 !4*datan(1.0)pi2 = 2*pi
!definicion de los parametrosUU = PAR(1)aa = PAR(2)ch = PAR(3)ca = PAR(4)xa = PAR(5)ro = PAR(6)ka0 = PAR(7)kh0 = PAR(8)Ia = PAR(9)ka2 = PAR(10)
Mt = 12.387d0Mw = 2.049bb = 0.135cla = pi2aa05 = 0.5-aacma = pi2*(aa+0.5)cs = 10.833kh2 = 0
! determinante matriz de masaSa = Mw*xa*bbd = Mt*Ia - Sa**2
! coeficientes sistemac1 = Ia*ch/dd1 = (Ia*ro*bb*cla+ro*bb**3*Mw*xa*cma)/dc2 = -Mw*xa*bb*ca/dd2 = (Ia*ro*bb**2*cla*aa05+Mw*xa*bb**4*ro*cma*aa05)/dc3 = -Mw*xa*bb*ch/dd3 = (-Mw*xa*bb**2*ro*cla-Mt*cma*ro*bb**2)/dc4 = Mt*ca/dd4 = (-Mt*bb**3*ro*cma*aa05-Mw*xa*bb**3*ro*cla*aa05)/dk1 = (Ia*ro*bb*cla+Mw*xa*bb**3*ro*cma)/dk2 = -(ro*bb**2*cla*Mw*xa+Mt*ro*bb**2*cma)/dN1h = Ia*kh2/dN1a = -Mw*xa*bb*ka2/dN2h = -Mw*xa*bb*kh2/dN2a = Mt*ka2/dgnl1 = cs*ro*bb*(cla*Ia + Mw*xa*bb**2*cma)/dgnl2 = -cs*ro*bb**2*(cla*Mw*xa + Mt*cma)/d
!sistemaF(1) = x2 ! x1=hF(2) = -Ia*kh0/d*x1-(c1+d1*UU)*x2 - &(k1*UU**2-Sa*ka0/d)*x3-(c2+d2*UU)*x4 - &N1a*x3**3-N1h*x1**3+gnl1*UU**2*(x2**3 + x3**3/UU**3 + &(aa05*bb*x4/UU)**3 + 3*x2**2*aa05*bb*x4/UU + &3*x2*x3**2/UU**2 + 6*x2*x3*aa05*bb*x4/UU**2 + &3*x2*(aa05*bb*x4)**2/UU**2 + &3*x3**2/UU**2*aa05*bb*x4/UU + &3*x3/UU*(aa05*bb*x4)**2/UU**2)

86 APENDICE A. CODIGOS PROGRAMA AUTO7P
F(3) = x4 ! x3=alphaF(4) = Sa*kh0/d*x1-(c3+d3*UU)*x2- &(k2*UU**2+ka0*Mt/d)*x3-(c4+d4*UU)*x4 - &N2a*x3**3-N2h*x1**3 + &gnl2*UU**2*(x2**3 + x3**3/UU**3 + &(aa05*bb*x4/UU)**3 + 3*x2**2*aa05*bb*x4/UU + &3*x2*x3**2/UU**2 + 6*x2*x3*aa05*bb*x4/UU**2 + &3*x2*(aa05*bb*x4)**2/UU**2 + &3*x3**2/UU**2*aa05*bb*x4/UU + &3*x3/UU*(aa05*bb*x4)**2/UU**2)
END SUBROUTINE FUNC

Bibliografıa
[1] Aldelkefi, A.; Ghommen, M. Model reduction of nonlinear aeroelastic systems experiencing Hopfbifurcation. Journal of Modeling, Simulation, Identification, and Control, 1: 57-77, 2013
[2] Aldelkefi, A.; Vasconcellos, R.; Nayfeh A.H.; Hajj M. An analytical and experimental investigationinto limite-cycle oscillations of an aeroelastic system. Nonlinear Dynamics 71: 159-173, 2013
[3] Arevalo Lozano, F. Aeroelasticidad de una aeronave en presencia de nolinealidades estructuralesconcentradas. Tesis doctoral, ETSIA, Universidad Politecnica de Madrid, Madrid, 2008.
[4] Beran, P.S.; Strganac, T.W.; Kim, K.; Nichkawde C. Studies of store-induced limit-cycle oscilla-tions using a model with full system nonlinearities. Nonlinear Dynamics 37: 323-339, 2004.
[5] Birtan, T. Flutter analysis and simulated flutter test of wings. Tesis doctoral, Middle East Tech-nical University, Ankara, 2012.
[6] Blazquez, A.; Perez-Saborid, M. Apuntes de clase de aeroelasticidad. Sevilla, curso 2016-2017.
[7] Bottema, O. On the stability of the equilibrium of a linear mechanical system. Zeitschrift furAngewandte Mathematik und Physik Volumen 6, p. 97-104, 1955.
[8] Brooking, B.M. Flutter analysis of a two-dimensional airfoil containing structural hysteresis non-linearities. Tesis doctoral, Carlenton University, Ottawa, 1998.
[9] Doedel, E.J., Oldeman, B.E. AUTO-07P: continuation and bifurcation software for ordinary dif-ferential equations. Concordia University, Montreal, Canada, 2012.
[10] Dowell, E.H.(editor). A Modern Course in Aeroelasticity. Kluwer Academic Publishers, NewYork, 2004.
[11] Fung, Y.C. An introduction to the Theory of Aeroelasticity. Dover Publications, INC, New York,1955, 2008.
[12] Garcıa-Fogeda, P.; Lopez Dıez, J. Apuntes de aeroelasticidad. Publicaciones ETSIA-UPM, Ma-drid, 1992.
[13] Gilliatt, H.C.; Strganac, T.W.; Kurdilla, A.J. Model reduction of nonlinear aeroelastic systemsexperiencing Hopf bifurcation. Nonlinear Dynamics 31: 1-22, 2003.
[14] Janarthanan, B.; Bruce Ralphin Rose, J. Study and analysis on the influence of flutter frequencyon airplane stability. International Journal on Theoretical anda Applied Research in MechanicalEngineering 2: 2319-2342, 2013.
[15] Kuznetsov, Y.A. Elements of Applied Bifurcation Theory. Springer, New York, 2007.
[16] Lee, B.H.; Price S.J.; Wong, Y.S. Nonlinear aeroelastic analysis of airfoils: bifurcation and chaos.Progress in Aerospace Sciences 35: 205-334, 1999.
[17] Pagano, D. J. Bifurcaciones en sistemas de control no lineales. Tesis doctoral, ETSI Universidadde Sevilla, Sevilla, 1999.
[18] Pigolotti, L.; Mannini, C. Destabilizing effect of damping on the post-critical flutter oscillationsof flat plates. Meccanica Volumen 52, Issue 13 p. 3149-3164, Octubre 2017.
87

88 BIBLIOGRAFIA
[19] Sanchez, I.; Gonzalez, L. Manual basico de LATEX . Dpto. Matematica Aplicada II (Universidadde Sevilla), Sevilla, 2003.
[20] Theodorsen, T. General theory of aerodynamic instability and the mechanism of flutter. NACAReport number: 496, 1934.
[21] Wiggins, S. Introduction to Applied Nonlinear Dynamical Systems and Chaos. Springer, NewYork, 2003.
[22] Wright, J.R.; Cooper, J.E. Introduction to Aircraft Aeroelasticity and Loads. John Wiley andSons, West Sussex, 2007.


















