
Proyecto Fin de Grado Grado en Ingenier a...
122
Proyecto Fin de Grado Grado en Ingeniería Aeroespacial Diseño de un UAV eléctrico de 3 metros de envergadura. Autor: Ana Meroño Garnica Tutores: Anibal Ollero Baturone y Jesús Martín Sánchez Dep. de Ingeniería de Sistemas y Automática Escuela Técnica Superior de Ingeniería Universidad de Sevilla Sevilla, 2014
Transcript of Proyecto Fin de Grado Grado en Ingenier a...

Proyecto Fin de Grado Grado en Ingeniería Aeroespacial
Diseño de un UAV eléctrico de 3 metros de envergadura.
Autor: Ana Meroño Garnica Tutores: Anibal Ollero Baturone y Jesús Martín Sánchez
Dep. de Ingeniería de Sistemas y Automática Escuela Técnica Superior de Ingeniería
Universidad de Sevilla Sevilla, 2014


Proyecto Fin de Grado Grado en Ingeniería Aeroespacial
Diseño de un UAV eléctrico de 3 metros de envergadura.
Autor:
Ana Meroño Garnica
Tutor:
Anibal Ollero Baturone Jesús Martín Sánchez
Dep. de Ingeniería de Sistemas y Automática Escuela Técnica Superior de Ingeniería
Universidad de Sevilla Sevilla, 2014


Proyecto Fin de Carrera: Diseño de un UAV eléctrico de 3 metros de envergadura.
Autor: Ana Meroño Garnica
Tutor: Anibal Ollero Baturone y Jesús Martín Sánchez
El tribunal nombrado para juzgar el Proyecto arriba indicado, compuesto por los siguientes miembros:
Presidente:
Vocales:
Secretario:
Acuerdan otorgarle la calificación de:
Sevilla, 2014

El Secretario del Tribunal



Índice general
Índice general III
Índice de tablas VII
Índice de figuras IX
1. Introducción 11.1. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. Estado del arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3. Motivación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4. Organización de la memoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2. Diseño 72.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2. Diseño preliminar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3. Diseño de los componentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3.1. Fuselaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3.2. Ala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3.3. Cola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.3.4. Tubo de cola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3.5. Tren de aterrizaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3.6. Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4. UAV desmontable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.5. Planos del UAV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3. Aerodinámica 173.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.2. Selección del perfil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.1. Selección del perfil del ala . . . . . . . . . . . . . . . . . . . . . . . . . 173.2.2. Selección del perfil de los estabilizadores. . . . . . . . . . . . . . . . . 22
3.3. Ala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3.1. Forma en planta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3.2. Posicion del estrechamiento . . . . . . . . . . . . . . . . . . . . . . . . 283.3.3. Torsión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.3.4. Diedro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.3.5. Flecha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.3.6. Combinación de perfiles . . . . . . . . . . . . . . . . . . . . . . . . . . 363.3.7. Ala escogída . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.3.8. Superficies de control . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.4. Estudio de los estabilizadores . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.4.1. Estabilizador horizontal . . . . . . . . . . . . . . . . . . . . . . . . . . 413.4.2. Estabilizador vertical . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
iii

3.5. UAV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.5.1. Estudio aerodinámico del UAV. . . . . . . . . . . . . . . . . . . . . . . 46
4. Estructuras 494.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.2. Materiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.3. Estructuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3.1. Fuselaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.3.1.1. Refuerzos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.3.1.1.1.Cuaderna de borde de ataque . . . . . . . . . . . . . . . . . . 514.3.1.1.2.Cuaderna de borde de salida . . . . . . . . . . . . . . . . . . 524.3.1.1.3.Protección inferior . . . . . . . . . . . . . . . . . . . . . . . . 52
4.3.2. Ala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.3.3. Cola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.3.4. Tubo de cola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.3.5. Tren de aterrizaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.4. Montaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564.5. Desglose de pesos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.6. Cálculo del centro de gravedad. . . . . . . . . . . . . . . . . . . . . . . . . . . 634.7. Estudio de cargas aerodinámicas y estructurales. . . . . . . . . . . . . . . . . 65
5. Estabilidad 675.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675.2. Dimensionado de las superficies de control . . . . . . . . . . . . . . . . . . . . 675.3. Configuración longitudinal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.3.1. Estabilidad estática longitudinal. . . . . . . . . . . . . . . . . . . . . . 695.3.1.1. Punto neutro . . . . . . . . . . . . . . . . . . . . . . . . . . . 705.3.1.2. Centro de gravedad . . . . . . . . . . . . . . . . . . . . . . . 715.3.1.3. Margen estático . . . . . . . . . . . . . . . . . . . . . . . . . 715.3.1.4. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . 715.3.1.5. Trimado longitudinal . . . . . . . . . . . . . . . . . . . . . . 73
5.3.2. Estabilidad dinámica longitudinal. . . . . . . . . . . . . . . . . . . . . 755.4. Configuración lateral-direccional . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.4.1. Estabilidad estática lateral-direccional. . . . . . . . . . . . . . . . . . . 775.4.2. Estabilidad dinámica lateral-direccional. . . . . . . . . . . . . . . . . . 82
5.5. Problema de viraje nivelado . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
6. Propulsión 876.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 876.2. Descripción de componentes. . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
6.2.1. Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 876.2.1.1. Funcionamiento . . . . . . . . . . . . . . . . . . . . . . . . . 886.2.1.2. Colocación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
6.2.2. ESC (Electronic Speed Controller). . . . . . . . . . . . . . . . . . . . . 906.2.3. Hélices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 916.2.4. Batería. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
6.3. Motor, hélice y batería. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 926.3.1. Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 926.3.2. Hélice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 946.3.3. Batería . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
6.4. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
iv

7. Conclusiones 99
Bibliografía 101
v

vi

Índice de tablas
3.1. Tabla para la comparación de perfiles. . . . . . . . . . . . . . . . . . . . . . . . . 22
4.1. Pesos del fuselaje. Se incluyen los pesos de los dos cascos que lo componen yde los refuerzos situados en su interior. . . . . . . . . . . . . . . . . . . . . . . 61
4.2. Pesos del ala. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.3. Pesos de la cola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.4. Peso del tubo de cola. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.5. Pesos del tren de aterrizaje. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.6. Pesos del motor, batería y hélice. . . . . . . . . . . . . . . . . . . . . . . . . . 624.7. Pesos del motor, batería y hélice. . . . . . . . . . . . . . . . . . . . . . . . . . 624.8. Cálculo del centro de masas del fuselaje. . . . . . . . . . . . . . . . . . . . . . 644.9. Cálculo del centro de masas de la cola. . . . . . . . . . . . . . . . . . . . . . . 644.10. Cálculo del centro de gravedad . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.1. Derivadas de estabilidad estática longitudinales. . . . . . . . . . . . . . . . . . 745.2. Derivadas de estabilidad dinámica longitudinales. . . . . . . . . . . . . . . . . 765.3. Derivadas de estabilidad estática laterales-direccionales. . . . . . . . . . . . . 825.4. Derivadas de estabilidad dinámica laterales-direccionales. . . . . . . . . . . . 85
6.1. Turnigy RotoMax 50 cc Brushless Outrunner. . . . . . . . . . . . . . . . . . . 926.2. Dimensiones del motor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 936.3. Especificaciones de la batería, tres de tipo Zippy Compact 5000 mAh 10 S 25 C Lipo Pack 956.4. Especificaciones de la batería, se utilizarán tres conectadas en paralelo del tipo
Zippy Compact 5000 mAh. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
vii

viii

Índice de figuras
1.1. UAV de distintos tamaños . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2. UAV tomados como referencia . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1. Estimación del peso en función de la envergadura. . . . . . . . . . . . . . . . 82.2. Diseño preliminar del UAV en CATIA. . . . . . . . . . . . . . . . . . . . . . . 82.3. Configuración final del UAV. . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4. Unión del fuselaje bicasco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.5. Fuselaje ensamblado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.6. Acceso interior a la aeronave. . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.7. Diseño final del ala. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.8. Diseño de la cola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.9. Tubo de cola. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.10. Tren de aterrizaje. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.11. Motor en configuración pusher. . . . . . . . . . . . . . . . . . . . . . . . . . . 142.12. UAV transportable. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.13. Planos del UAV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1. NACA 2418 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.2. NACA 4415 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.3. NACA 4418 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.4. GA35A312 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.5. GA35A315 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.6. s8036 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.7. Estudio de los perfiles. Cl frente α. . . . . . . . . . . . . . . . . . . . . . . . . 203.8. Estudio de los perfiles. Cd frente α. . . . . . . . . . . . . . . . . . . . . . . . . 203.9. Estudio de los perfiles. Cm frente α. . . . . . . . . . . . . . . . . . . . . . . . 213.10. Estudio de los perfiles. Cl frente Cd. . . . . . . . . . . . . . . . . . . . . . . . 213.11. Estudio de los perfiles. Cl/Cd frente α. . . . . . . . . . . . . . . . . . . . . . . 223.12. NACA 0009 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.13. Estudio de la forma en planta del ala. . . . . . . . . . . . . . . . . . . . . . . 243.14. Estudio de forma en planta. CL frente α. . . . . . . . . . . . . . . . . . . . . . 253.15. Estudio de forma en planta. CL frente CD. . . . . . . . . . . . . . . . . . . . . 253.16. Estudio de forma en planta. CL/CD frente α. . . . . . . . . . . . . . . . . . . 263.17. Estudio de forma en planta. CDi frente α. . . . . . . . . . . . . . . . . . . . . 263.18. Estudio de forma en planta. CDp frente α. . . . . . . . . . . . . . . . . . . . . 273.19. Estudio de forma en planta. CDT
frente α. . . . . . . . . . . . . . . . . . . . . 273.20. Estudio de la posición del estrechamiento. . . . . . . . . . . . . . . . . . . . . 283.21. Estudio de la posición del estrechamiento. CL frente α. . . . . . . . . . . . . . 283.22. Estudio de la posición del estrechamiento. CL frente CD. . . . . . . . . . . . . 293.23. Estudio de la posición del estrechamiento. CL/CD frente α. . . . . . . . . . . 293.24. Estudio de la posición del estrechamiento.CDi frente α. . . . . . . . . . . . . . 30
ix

3.25. Estudio de la posición del estrechamiento. CDp frente α. . . . . . . . . . . . . 303.26. Estudio de la posición del estrechamiento. CDT
frente α. . . . . . . . . . . . . 313.27. Estudio de la torsión. CL frente α. . . . . . . . . . . . . . . . . . . . . . . . . 313.28. Estudio de la torsión. CL frente CD. . . . . . . . . . . . . . . . . . . . . . . . 323.29. Estudio de la torsión. CL/CD frente α. . . . . . . . . . . . . . . . . . . . . . . 323.30. Estudio de la torsión. CDi frente α. . . . . . . . . . . . . . . . . . . . . . . . . 333.31. Estudio de la torsión. CDp frente α. . . . . . . . . . . . . . . . . . . . . . . . . 333.32. Estudio de la torsión. CDT
frente α. . . . . . . . . . . . . . . . . . . . . . . . 343.33. Estudio del diedro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.34. Características geométricas del ala. . . . . . . . . . . . . . . . . . . . . . . . . 363.35. Colocación y dimensiones del flaperon en el ala. . . . . . . . . . . . . . . . . . 373.36. Perfil con flaperones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.37. Análisis de los flaperones. CL frente α. . . . . . . . . . . . . . . . . . . . . . . 383.38. Análisis de los flaperones. CL frente CD. . . . . . . . . . . . . . . . . . . . . . 393.39. Análisis de los flaperones. CL/CD frente α. . . . . . . . . . . . . . . . . . . . 393.40. Análisis de los flaperones. CDi frente α. . . . . . . . . . . . . . . . . . . . . . 403.41. Análisis de los flaperones. CDp frente α. . . . . . . . . . . . . . . . . . . . . . 403.42. Análisis de los flaperones. CDT
frente α. . . . . . . . . . . . . . . . . . . . . . 413.43. Forma en planta del estabilizador horizontal (XFLR5). . . . . . . . . . . . . 423.44. Estabilizador vertical (XFLR5). . . . . . . . . . . . . . . . . . . . . . . . . . 423.45. UAV en XFLR5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433.46. Estudio UAV. CL frente α. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433.47. Estudio UAV. CL frente CD. . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.48. Estudio UAV. CL/CD frente α. . . . . . . . . . . . . . . . . . . . . . . . . . . 443.49. Estudio UAV. CDi frente α. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.50. Estudio UAV. CDp frente α. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.51. Estudio UAV. CDT
frente α. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.1. Piezas del fuselaje. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.2. Sandwich fibra de vidrio y Rohacell. . . . . . . . . . . . . . . . . . . . . . . . 514.3. Cuaderna para reforzar la zona del borde de ataque del ala . . . . . . . . . . 514.4. Cuaderna para el borde de salidad del ala y el motor. . . . . . . . . . . . . . 524.5. Protección inferior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.6. Unión de las alas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.7. Cola del UAV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.8. Tubo de cola. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.9. Tren de aterrizaje. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.10. Posición del tren de aterrizaje. . . . . . . . . . . . . . . . . . . . . . . . . . . 564.11. Pasos para el montaje. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564.12. Zona de colocación del motor. . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.13. Pasos para el montaje. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.14. Pasos para el montaje. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.15. Montaje del ala. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.16. Unión de los cascos del fuselaje. . . . . . . . . . . . . . . . . . . . . . . . . . . 594.17. Fuselaje y ala emsamblados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.18. Montaje del motor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604.19. Montaje finalizado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.20. Desglose de pesos del UAV sin carga de pago. . . . . . . . . . . . . . . . . . . 634.21. Desglose de pesos del UAV con carga de pago. . . . . . . . . . . . . . . . . . . 634.22. Se muestra una barra empotrada en el extremo que representa el ala a la hora
de realizar el estudio de las cargas aerodinámicas. . . . . . . . . . . . . . . . . 65
x

4.23. Ecuaciones de la Resistencia de Materiales utilizadas para el cálculo de lafuerza y del momento que se produce en el encastre, considerando el ala comouna viga empotrada en el extremo con una carga uniforme aplicada. . . . . . 65
5.1. Timón de profundidad. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 685.2. Timón de dirección. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 685.3. Estabilidad longitudinal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 695.4. Tipos de equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 705.5. Ubicación del centro de gravedad y del punto neutro según la posición del
centro de gravedad del ala. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 715.6. Posición del ala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 725.7. Configuración longitudinal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 725.8. Variación del ángulo de ataque y el ángulo de deflexión del timón de profun-
didad para trimar el UAV en función de la velocidad de vuelo. . . . . . . . . 755.9. Gráfica para el cálculo de τ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 785.10. Gráficas para el cálculo del efecto diedro. [2] . . . . . . . . . . . . . . . . . . . 785.11. Tabla en la que se muestra como afecta a la estabilidad la posición del ala. . 795.12. Gráficas para el cálculo de Clδ y Clδ
(Clδ)theory
. . . . . . . . . . . . . . . . . . . . 795.13. Cálculo de los coeficientes K1 y K2. . . . . . . . . . . . . . . . . . . . . . . . 805.14. Gráfica para el cálculo de la constante K. . . . . . . . . . . . . . . . . . . . . 815.15. Cálculo para CYβ̇
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 825.16. Gráfica para el cálculo de CYp . . . . . . . . . . . . . . . . . . . . . . . . . . . 835.17. Gráfica para el cálculo de Clp . . . . . . . . . . . . . . . . . . . . . . . . . . . 845.18. Gráfica para el cálculo de Cálculo de Cnp . . . . . . . . . . . . . . . . . . . . 84
6.1. Motor brushless de tipo outrunner (izquierda) e inrunner (derecha). . . . . . 896.2. UAV con motor en configuraciñon pusher. . . . . . . . . . . . . . . . . . . . . 896.3. UAV con motor en configuraciñon puller. . . . . . . . . . . . . . . . . . . . . 906.4. Paso de la hélice. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 916.5. Turnigy RotoMax 50 cc Brushless Outrunner. . . . . . . . . . . . . . . . . . . 936.6. Dimensiones del motor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 936.7. Hélice bipala. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 946.8. Añadir datos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 956.9. Potencia suministrada al motor. . . . . . . . . . . . . . . . . . . . . . . . . . . 966.10. Tiempo en función de la velocidad de vuelo. . . . . . . . . . . . . . . . . . . . 966.11. Rendimiento total. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 976.12. Potencia porporcionada al eje. . . . . . . . . . . . . . . . . . . . . . . . . . . . 976.13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 986.14. Rendimiento de la hélice. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
xi


Índice de Símbolosα — Ángulo de entrada en pérdidaβ — Ángulo de resbalamientoϕ — Ángulo de balanceδe — Ángulo de deflexión del timón de profundidadδr — Ángulo de deflexión del timón de direcciónδa — Ángulo de deflexión del timón de los flaperonesS — Superfieb — EnvergaduraAR — AlargamientoM.A.C. — Cuerda aerodinámica mediacr — Cuerda en la raízct — Cuerda en la puntaE — EstrechamientoΛc/4 — Flecha en la cuerda aerodinámica mediaΛLE — Flecha en el borde de ataqueiw — Incidencia del alait — Incidecia de la colaca — Cuerda del flaperonba — Envergadura del flaperonAa — Área del flaperoncr — Cuerda del timón de direcciónhr — Altura del timón de direcciónAr — Área del timón de direcciónce — Cuerda del timón de profundidadbe — Envergadura del timón de profundidadAe — Área del timón de profundidadNP — Punto neutroClα — Pendiente de sustentación del perfil aerodinámicoCdmin
— Coeficiente de resistencia mínima del perfil.Cm0 — Coeficiente de momento del perfil a ángulo de ataque nulo(Cl/Cd)max— Eficiencia máxima del perfilαs — ángulo de ataque de entrada en pérdida del perfilα0 — ángulo de ataque para el que la sustentación del perfil es nulaCL — Coeficiente de sustentaciónCD — Coeficiente de resistenciaCM — Coeficiente de momentoCL/CD — Eficiencia aerodinámicaCDi — Coeficiente de resistencia inducidaCDp — Coeficiente de resistencia parásitaCDT
— Coeficiente de resistencia totalCL0 — Coeficiente de sustentación en α = 0◦
CM0 — Coeficiente de momento en α = 0◦
CLα — Pendiente de la curva de sustentaciónCMα — Pendiente de la curva de momento∂ϵ∂α — Deflexión de la estelaη — Presión dinámica

xiv

Capítulo 1
Introducción
En la memoria de este proyecto se detalla el diseño de un vehículo aéreo no tripulado(UAV). Para su desarrollo se ha hecho uso de la Ingeniería concurrente, manteniendo unarelación estrecha entre todos los campos de estudio que se han desarrollado y realimentandolos datos de un área a otra de manera que los resultados sean los más precisos posibles.Para ello, se hizo inicialmente un diseño preliminar del vehículo, estimando las dimensionesmediante datos estadísticos. Posteriormente se fueron desarrollando cada uno de los capítulosrecogidos en la memoria para obtener el resultado final.
En el presente documento se recoge todo este proceso y en este capítulo de Introducciónse explicará de manera general cuales han sido los objetivos del proyecto, que referencias sehan tomado y como está organizado el contenido.
1.1. ObjetivosEl objetivo de este proyecto es realizar el diseño de un UAV de 3 metros de envergadura
propulsado mediante un motor eléctrico. Antes de comenzar el diseño de la aeronave, seimpusieron una serie de requisitos que debía cumplir el UAV, que se pueden resumir en lossiguientes:
Ala rectangular hecha en foam de baja densidad y chapada en fibra. Se pretende en unprincipio diseñar un ala entre 3 y 4 metros de envergadura, dimensionándola de maneraque el UAV tenga cierta tendencia a un planeador (mínima).
Capacidad de desmontar el ala en dos partes.
Fuselaje sencillo de fabricar y fácilmente transportable.
Autonomía en torno a 60 minutos.
Carga de pago de 4 Kg.
Motor Pusher.
Tren de aterrizaje triciclo con rueda delantera orientable.
Altura de vuelo en torno a 500 m.
En el presente documento se detallan los pasos que se han seguido para el diseño de laaeronave. Para su desarrollo, se ha hecho uso de la información recogida en las referenciasde la bibliografía que permiten obtener resultados bastante aproximados a los reales aunquees necesario tener en cuenta que están expuesto a un margen de error. Entre estos recursos
1

utilizados han sido de gran ayuda otros Proyecto de Fin de Carrera y Fin de Máster queabordaban temas similares. Así mismo, se han empleado las técnicas recogidas en la literaturade libros que se centran en el cálculo y el diseño de aeronaves. Por otra parte, se ha hechouso de programas como son MATLAB, CATIA, XFLR5 y MotoCalc para desarrollar enprofundidad las distintas áreas del trabajo.
1.2. Estado del arte
Un UAV (Unmanned aerial vehicle) es una aeronave que vuela sin piloto a bordo, ya searemotamente o localmente, pero sin presencia humana. Actualmente, es una de las áreas de laindustria aeronáutica con mayor potencial de crecimiento, ya que son aeronaves maniobrablesque pueden emplearse para un amplio campo de trabajo, desde dirigibles y globos, a avionesradio controlados y aeronaves prácticamente autónomas, pudiendo ser su coste de explotaciónmenor que en el caso de aeronaves tripuladas.
Los primeros UAVs se construyeron a mediados del siglo XIX. Su uso comenzó teniendofines puramente militares, utilizando los vehículos como misiles para ataques bélicos durantela Primera y Segunda Guerra Mundial. Desde entonces han sido empleados en aplicacionesmilitares como pueden ser reconocimiento del terreno, enlace de comunicaciones y precisión eiluminación de blancos en misiones de alto riesgo. A todas aquellas tecnologías desarrolladaspor la industria bélica se les fue buscando aplicaciones civiles que redundaran en el beneficiode la sociedad, como son investigación del entorno meteorológico y ecológico, control decosechas, control de tráfico e inspección de carreteras, control de narcotráfico, topografía,vigilancia, extinción de incendios, etc.
La gran ventaja de este tipo de aeronaves es la ausencia de piloto y tripulación, que aportamuchas ventajas debido a que se pueden llevar a cabo misiones peligrosas o tediosas para elser humano y también permite la disminución del tamaño y el peso del vehículo hasta límitesinsospechados, por lo que cada vez son más los campos en los que se están empleando estetipo de aeronaves.
Los UAVs atienden a un gran número de clasificaciones debido a su gran diversidad. Unade ellas es la clasificación según su tamaño y peso:
Micro. Peso menor a 1 Kg.
Mini. Peso entre 1 y 10 Kg.
Pequeño. Peso entre 10 y 50 Kg.
Mediano. Peso entre 50 y 100 Kg.
Grande. Más de 100 Kg
Otras clasificaciones a las que pueden atender son el tipo de ala, la forma de propulsiónempleada, la altura de vuelo, la forma de despegue, etc.
2

(a) Dragonfly Insectothopter. (b) X-Vision. (c) Global Hawk.
Figura 1.1: UAV de distintos tamañosSe muestran desde pequeños como insectos hasta del tamaño de una aeronave convencional.
Por otra parte, es importante conocer la normativa vigente para este tipo de aeronaves.Actualmente está en proceso de aprobación una nueva normativa. El texto aprobado no es laregulación definitiva, debido a la necesidad de modificación de otras leyes y regulaciones, peroes una medida de transición hasta la aprobación de la definitiva. Este mecanismo transitorioincluye la realización de actividades aéreas como son trabajos técnicos y científicos en vuelosde prueba, demostraciones aéreas, programas de investigación, etc. Y permiten realizarlas enespacio aéreo no controlado siempre y cuando se encuentren en lejos de zonas habitadas delas siguientes formas:
VLOS (línea visual): vuelo en una altura máxima de 120 m y 500 desde el operadorpara aeronaves con un peso máximo de 25 Kg, a una distancia superior a 8 Km de unaeropuerto o aeródromo.
BVLOS (Más allá de la linea visual): a una altura mayor de 120 m, para aeronavesde masas inferior a 2 Kg, con medios para conocer la posición de la aeronave y a unadistancia superior a 15 Km.
También será necesaria la identificación de la aeronave y del operador, así como delcertificado de aeronavegabilidad para UAVs de más de 25 Kg de MTOW.
1.3. MotivaciónPara comenzar con el diseño del UAV se hizo un estudio entre otros ya existentes con
características similares para ver que tipo de configuración sería la más adecuada.En la Figura 1.2 se muestran los UAVs que se tomaron al principio como referencia.
(a) Aerosonde (b) X-Vision
3

(c) Raven (d) Viewer
Figura 1.2: UAV tomados como referencia
Estas aeronaves se escogieron debido a la similitud que tienen con las ideas iniciales dela aeronave y se estudió la configuración que tienen para aportar ideas al diseño del UAV.Todas son de ala fija, motor en configuración pusher y tamaño medio. Además tienen unfuselaje con forma sencilla y ala alta, lo que aportará mayor estabilidad a la aeronave. Elcaso del Viewer no se asemeja tanto a la idea inicial, pero se toma como referencia paraobservar la configuración del ala con gran envergadura, ya que se pretende que el UAV tiendaun poco a tener configuración de planeador. En cuanto a la cola, cada una de ella presentauna configuración distinta, por lo que se estudiará cual es el caso más favorable.
Se tomó como referencia principal el X-Vision, ya que se pretende que el UAV tenga untamaño simitar e incorpore tren de aterrizaje.
1.4. Organización de la memoriaEn los capítulos que conforman la memoria de este proyecto se recogen todos los pasos
que se han seguido a la hora de realizar el diseño de la aeronave. Es importante destacar queel orden utilizado a la hora de clasificar los capítulos no es exactamente el que se ha seguido,debido a que para ir avanzando en las diferentes áreas ha sido necesario ir tomándo datos delresto. Aun así, se seleccionó este orden porque se ha creído que puede resultar más cómodopara el lector para su comprensión.
El capítulo de Diseño es el segundo en este proyecto, siguiendo al de Introducción. Enel se definen todos los elementos que compondrán la aeronave y la configuración final de lamisma, cuya maqueta se realizará en CATIA. Se muestra el resultado final para dar unavisión general de cual es la idea que se quiere alcanzar proporcionando así una base paraseguir todos los pasos que se darán a partir de ahora.
En el tercer capítulo del proyecto, Aerodinámica, se detalla el diseño de las superficiessustentadoras del UAV. Se hace un estudio mediante XFLR5 para tratar de elegir la confi-guración óptima para las condiciones de vuelo. Se detallan también los datos aerodinámicosdel avión, que serán necesarios para el cálculo de la estabilidad de la aeronave.
En el capítulo cuatro, Estructuras, se detallan los materiales de los que estará compuestala aeronave así como el centro de gravedad, que servirá para definir la Estabilidad del UAV(capítulo cinco), donde se estudiarán las condiciones de vuelo equilibrado. Para ello se haceuso de la literatura y del programa MATLAB.
Posteriormente se muestra en el capítulo seis, Propulsión, el sistema motor escogido ysu funcionamiento, todo ello calculado mediante el porgrama MotoCalc. Fianlmente, en el
4

último capítulo se expondrán las conclusiones sacadas sobre el proyecto y recomendacionespara desarrollos futuros.
5

6

Capítulo 2
Diseño
2.1. IntroducciónA la hora de realizar el diseño de la aeronave se han tenido en cuenta todos los requisitos
mencionados en el capítulo de Introducción del trabajo. El diseño de un UAV puede abarcartodo tipo de tamaños y configuraciones ya que existen infinidad de posibilidades, por lo quela definición del diseño vendrá dada por la misión que se quiere que cumpla el vehículo unavez construido.
En este caso, el UAV ha sido diseñado con un fuselaje capaz de albergar hasta 4 Kg decarga de pago. Esto permite a la aeronave cargar con equipos para distintas misiones, comopuede ser incorporar un POD de reabastecimiento en vuelo, posibilidad de incluir paracaídasal UAV, cámaras, dispositivos de medida, etc. aunque en este trabajo no se ha estudiado laincorporación de ningún elemento en concreto, tan solo la carga de pago como tal.
En este capítulo se tratarán por tanto todos estos aspecto. En la sección (2.2) se dará unaidea inicial de que configuración final se desea para la aeronave. Para ello se hará un dimen-sionado preliminar. Seguidamente, en la sección (2.3), se ”demontar” el UAV y se definirácada componente de la aeronave de manera individual. Al ser el UAV de gran envergadura,se proporciona un método para facilitar el transporte en la sección (2.4). Por último, en lasección (2.5) se muestran los planos acotados de la aeronave.
2.2. Diseño preliminarPara tener una idea inicial de la forma que tomaría el UAV se utilizaron algunas refe-
rencias, como son el X-Vision y el aerosonde, ya nombrados en el capítulo de Introducción.Desde un principio se quería una aeronave entre 3 y 4 metros de envergadura, con una enver-gadura algo mayor que el resto del cuerpo en proporción, haciendo que el UAV fuese un pocoplaneador. Con estas ideas se hizo una estimación inicial del peso de la aeronave mediante lagráfica extraída del documento de la bibliogría [10]. Para una envergadura entre 3 y 4 metrosse obtiene un peso aproximado de MTOW=20 kg (incluyendo la carga de pago), que será elque se utilice para comenzar a iterar.
7

Figura 2.1: Estimación del peso en función de la envergadura.
Una vez hecha la estimación del peso de hizo una estimación de las medidas del UAVen función a las referencias, haciendo un estudio proporcional para las medidas del ala, elfuselaje, el tubo de cola y los estabilizadores, de manera que el primer prototipo del aviónadquiriera unas dimensiones coherentes.
Se hizo un primer modelo en CATIA, en el que se escogió un valor de envergadura delala muy próximo a 3 metros. El diseño es robusto y sin detalles, para obtener una primeravisión de como serán los resultados finales.
Figura 2.2: Diseño preliminar del UAV en CATIA.
Se escogió por tanto un diseño con ala alta, para aumentar la estabilidad del avión, conmotor en configuración pusher, tal y como se indica en los requisitos del capítulo de Intro-ducción. El estabilizador estará situado en forma de T invertida y la unión entre el fuselaje
8

y la cola se hará mediante un tubo cilíndrico. A grandes rasgos estas será la configuracióndeseada para el UAV.
A partir de entonces el proceso de diseño se ha ido realimentando con los resultadosobtenidos en el resto de áreas (aerodinámica, estructuras, estabilidad y control y propulsión)hasta obtener un prototipo definido (Figura 2.3).
(a) Diseño final del UAV.
(b) Diseño final del UAV.
Figura 2.3: Configuración final del UAV.
2.3. Diseño de los componentesEl diseño de cada uno de los componentes se realizó tratando de conseguir un vehículo
ligero, de gran envergadura, con capacidad de incorporar en el fuselaje una carga de pago de4 Kg y a su vez fácilmente transportable. A continuación de muestra como se hizo el diseño
9

de todos los componentes del UAV.
2.3.1. Fuselaje
El fuselaje consiste en una estructura biscasco con refuerzos en su interior. La estructuraestá hecha de manera que puede montarse y desmontarse con facilidad mediante la uniónatornillada de ambas partes. Se muestran en la Figura 2.9 los dos cascos que conforman elfuselaje, y como se procede para realizar el ensamblaje de ambos mediante tornillos. En laFigura 2.5 se puede ver el fuselaje ya montado, habiendo incluido previamente los refuerzos(la explicación del montaje se detallará en el capítulo de Estructuras).
Figura 2.4: Unión del fuselaje bicascoSe muestra como será la unión atornillada entre ambos cascos del fuselaje.
10

Figura 2.5: Fuselaje ensambladocon los refuerzos incluidos en su interior.
La construcción bicasco del fuselaje permite un fácil acceso a la parte del morro delavión. Por otra parte, se incluye también una compuerta en la panza de la segunda pieza delfusejale, que irá atornillada, para poder acceder a la carga de pago sin necesidad de desmontarel fuselaje del UAV (Figura 2.6). También se aprecia en las Figuras la zona donde se situaráel ala, que es la parte superior del casco y el tubo de cola, en la parte posterior, y la zona deprotección del motor.
(a) Se muestra el casco de la zona trasera del fuselaje, comla compuerta retirada.
(b) Compuerta del fuselaje en configuración final.
Figura 2.6: Acceso interior a la aeronave.
2.3.2. Ala
El ala de la aeronave será un ala rectangular, construida en poliestireno expandido de bajadensidad con un recubrimiento de fibra de vidrio y fácil de fabricar. La gran envergadura del
11

ala resultaba ser un impedimento a la hora de transportar el UAV, por lo que se decidió hacerun ala desmontable, reduciendo las dimensiones del UAV a la hora de transportarlo.
(a) Planta del ala.
(b) Vista frontal.
(c) Vista lateral.
Figura 2.7: Diseño final del ala.
Las características geométricas y aerodinámicas del ala serán definidas en el capítulode Aerodinámica del trabajo. Se añadirán al ala flaperones, que funcionarán tanto comodispositios hipersustentadores (flaps y slats) como de control (alerones). Estos dispositivosserán controlados mediante servos, que se situarán uno en cada ala.
En cuanto a la posición del ala en el fuselaje, se decidió emplear un ala alta por variosmotivos. En primer lugar, el ala alta contribuye a la estabilidad estática lateral-direccional.Por otra parte, utilizar un ala alta implica una mayor sencillez a la hora de realizar un UAVdesmontable, ya que permite una unión más sencila de las alas y el fuselaje que si el ala fueraa altitud media. La posición longitudinal vendrá dada por el estudio de la estabilidad estáticalongitudinal, teniendo en cuenta que la posición más retrasada estará definida por la longituddel fuselaje y la colocación del motor.
2.3.3. Cola
En el diseño de la cola se barajaron dos opciones: utilizar cola en forma de T o en formade T invertida. La cola en V se descartó desde un principio por las dificultades que abarcaeste tipo de cola a la hora de realizar el trimado de la aeronave. En el caso de la cola enT, el estabilizador horizontal se sitúa sobre el vertical, por lo que hay que hacer este últimomucho más resistente o de materiales mejores (mayor precio), por lo que finalmente se decidióutilizar una cola en forma de T invertida.
12

Figura 2.8: Diseño de la colacompuesta por un tubo de unión, el estabilizador horizontal y el vertical. El tubo de unión
de la cola permitirá unir el tubo de cola a los estabilizadores.
2.3.4. Tubo de cola
El tubo de cola será de forma cilíndrica con un espesor de 3 mm. Servirá como nexo deunión entre la cola y el fuselaje.
Figura 2.9: Tubo de cola.
2.3.5. Tren de aterrizaje
El tren de aterrizaje es un tren triciclo. Es el que poseen la mayoría de los aviones en laactualidad ya que posee un tren secundario que se ubica en la nariz mejorando la estabilidaddel avión al momento de despegar y aterrizar en comparación con el tren convencional, conel que se debía tener más cuidado para no perder el control. La rueda de la parte delantera esorientable, para una mayor maniobrabilidad del UAV cuando se encuentre en la pista. Es fijo,lo que hará que aumente la resistencia de la aeronave en vuelo. Su disposición es la mostradaen la Figura 2.10.
13

Figura 2.10: Tren de aterrizaje.
2.3.6. Motor
La selección del motor y su ubicación se determinarán en el capítulo de Propulsión. Elmotor se situará en configuración pusher y su colocación en la aeronave queda de la formaindicada en la Figura 2.11.
Figura 2.11: Motor en configuración pusher.
El motor se situará en zona interior del fuselaje y se fijará a un refuerzo que se incoporaráen esta zona. Al estar el motor elevado se consigue protección para la hélice en despegue yaterrizaje, evitando su choque contra el suelo.
La batería que alimenta el motor se colocará en la zona del morro del avión, para adelantarel centro de gravedad y favorecer a la estabilidad, como se comentará en capítulos posteriores.
2.4. UAV desmontableUna vez definidas las dimensiones y la configuración de la aeronave, se pasa a estudiar
como se transportaría. En la Figura 2.13 se muestra una de las posibles formas, desmontandolas ala en dos partes pero dejando el fuselaje ensamblado. Como se puede observar, seríaposible meterlo en una caja de 1.77 x 0.635 x 0.705 m.
14

(a) UAV desmontado en una caja.
(b) UAV demsontado en una caja.
(c) UAV desmontado en una caja.
Figura 2.12: UAV transportable.
15

2.5. Planos del UAV
(a)
(b)
Figura 2.13: Planos del UAV.
16

Capítulo 3
Aerodinámica
3.1. IntroducciónEn este capítulo se hace un estudio de la aerodinámica del UAV. Para ello se hace uso
del programa XFLR5, así como de los libros de diseño de aeronaves mencionados en labibliografía.
Para comenzar se hará un estudio de los perfiles aerodinámicos que llevarán las superficiessustentadoras en la sección (3.2). A continuación, en la sección (3.3), se analizarán alas condiversas características para buscar la configuración más adecuada. En la siguiente sección(3.4) se calcularán las dimensiones y características geométricas de los estabilizadores. Porúltimo, en la sección (3.5) se hará un análisis del UAV en XFLR5, conformado por lassuperficies sustentadoras y los estabilidadores.
3.2. Selección del perfilLa selección del perfil aerodinámico es muy importante dentro de la aerodinámica de la
aeronave, tanto la del perfil del ala como la del los estabilizadores. El perfil será el encargadode generar la fuerza de sustentación necesaria con la mínima resistencia aerodinámica posible,combinando adecuadamente su geometría con las condiciones de vuelo.
Para la selección del perfil se hizo inicialmente una recopilación de los posibles candidatosque según datos históricos podrían resultar efectivos para los requisitos impuestos. Para ellose realizó una búsqueda exhaustiva, en la que se tomaron perfiles de diseño de aviones simi-lares([1] y X-Vision). Estos perfiles tienen en común que presentan un buen comportamientoa bajos números de Reynolds y son de fácil manufactura.
3.2.1. Selección del perfil del ala
Para el caso del ala se han estudiado seis perfiles de distintos tipos. Tres perfiles de lafamilia NACA, uno de la familia Selig y por último los dos perfiles GA utilizados por elX-Vision. A la hora de analizar los perfiles se ha utilizado XFLR5 y se ha hecho un malladomás fino de los puntos del perfil para obtener resultados más precisos. Es importante añadirque el número de Reynolds tiene un papel muy importante en el estudio de la aerodinámicadel avión y hay que tenerlo en cuenta a la hora de hacer el estudio de los perfiles para cubrirel rango necesario de números de Reynolds en los que el avión volará, dado que el análisis 3Dde las superficies aerodinámicas se interpolará entre todas las polares obtenidas. Para ello seha utilizado la definición de este número adimensional:
Re = c̄ · Vν
17

Se definió un amplio rango de velocidades de vuelo y se calculó el valor más alto y elmás bajo de Re (2,84 · 105-1,14 · 106 ), siendo el análisis de XFLR5 en 2D viscoso, con unaviscosidad cinemática de ν = 1,46 · 10−5m2/s.
Las características de cada uno de los perfiles seleccionados son las siguientes:
NACA 2418
• Máxima curvatura del 2 %.• Máxima curvatura localizada al 40.99 % del borde de ataque.• Espesor máximo del 18 % del a cuerda y su posición al 29.99 %.
Figura 3.1: NACA 2418
NACA 4415
• Máxima curvatura del 4.01 %.• Máxima curvatura localizada al 41 % del borde de ataque.• Espesor máximo del 14.99 % del a cuerda y su posición al 30 %.
Figura 3.2: NACA 4415
NACA 4418
• Máxima curvatura del 4 %.• Máxima curvatura localizada al 41.97 % del borde de ataque.• Espesor máximo del 18.02 % del a cuerda y su posición al 28.96 %.
Figura 3.3: NACA 4418
18

GA35A312
• Máxima curvatura del 2.54 %.• Máxima curvatura localizada al 44 % del borde de ataque.• Espesor máximo del 11.99 % del a cuerda y su posición al 36 %.
Figura 3.4: GA35A312
GA35A315
• Máxima curvatura del 2.55 %.• Máxima curvatura localizada al 47 % del borde de ataque.• Espesor máximo del 14.99 % del a cuerda y su posición al 36 %.
Figura 3.5: GA35A315
s8036
• Máxima curvatura del 1.85 %.• Máxima curvatura localizada al 35 % del borde de ataque.• Espesor máximo del 16.01 % del a cuerda y su posición al 36 %.
Figura 3.6: s8036
Una vez analizados los perfiles, se exportaron los resultados de XFLR5 para obtener lasgráficas en MATLAB y poder hallar de manera más exacta las propiedades más relevantesde los mismos. Se representaron las curvas características de las siguientes figuras, de dondese extrajeron los valores de CDmin , Cm0 , αs, α0, (CL/CD)max y CLα para cada perfil.
19

Figura 3.7: Estudio de los perfiles. Cl frente α.Se comparan las curvas de sustentación de cada uno de los perfiles.
Figura 3.8: Estudio de los perfiles. Cd frente α.En esta gráfica se representa la variación del coeficiente de resistencia con el ángulo de
ataque para los perfiles estudiados.
20

Figura 3.9: Estudio de los perfiles. Cm frente α.En la gráfica se aprecia como varía el coeficiente de momento de cada uno de los perfiles con
el valor del ángulo de ataque.
Figura 3.10: Estudio de los perfiles. Cl frente Cd.Comparación de las polares de cada uno de los perfiles.
21

Figura 3.11: Estudio de los perfiles. Cl/Cd frente α.Se aprecia la eficiencia de cada uno de los perfiles estudiados.
Posteriormente se tomaron los datos numéricos de los parámetros antes mencionados,CDmin , Cm0 , αs, α0, (CL/CD)max y CLα , para poder realizar una comparación. Una veztomados los datos que hizo una suma ponderada (Tabla 3.1) asignándole un peso a cadaparámetro según se ha considerado que sea más o menos importante a la hora de seleccionarel perfil. El mayor peso se le dió a Cdmin
, ya que se ha creido importante conseguir una bajaresistencia.
Peso NACA 2418 NACA 4415 NACA 4418 GA35A312 GA35A315 s8036Cdmin 0.3 0.00718 0.00637 0.00767 0.00501 0.00646 0.00611Cm0 0.125 -0.0493 -0.0857 -0.0972 -0.0489 -0.0466 -0.029αs 0.15 17◦ 16,5◦ 16◦ 15,5◦ 16◦ 19◦
α0 0.125 −2,235◦ −4,428◦ −4,369◦ −2,384◦ −2,203◦ −1,697◦
(Cl/Cd)max 0.15 99.22 124.6 120.1 135.2 128 100.8Clα 0.15 0.1078 0.0929 0.1032 0.1058 0.1125 0.0956
TOTAL 1 59.517 68.828 60.102 82.805 68.338 66.864
Cuadro 3.1: Tabla para la comparación de perfiles.
Por tanto, según los resultados apreciados en la tabla, el perfil más adecuado para el aladel avión es el GA35A312, el cual obtuvo la mayor puntuación en la ponderación. Cabe añadirque en el resultado final del ala se utilizará una combinación de éste y el perfil GA35A315,similar a la que se utiliza en el ala del X-Vision.
3.2.2. Selección del perfil de los estabilizadores.
En este caso se hizo un estudio para ver que tipo de perfiles utilizaban los estabilizadoresde aviones similares. Los perfiles más comunes son de tipo NACA de 4 dígitos y simétricos.
22

Tanto el estabilizador horizontal como el vertical utilizan perfiles sin curvatura para evitar laaparición de fuerzas de sustentación en direcciones no deseadas. Se optó por el perfil NACA0009, perfil simétrico debido a que se han obtenido buenos resultados en aviones de tamañosimilar, como por ejemplo el X-Vision.
NACA 0009
• Máxima curvatura del 0 %.• Máxima curvatura localizada al 0 % del borde de ataque.• Espesor máximo del 9 % del a cuerda y su posición al 29 %.
Figura 3.12: NACA 0009
3.3. AlaEl ala, compuesta por los perfiles aerodinámicos escogidos, será la encargada de generar
la diferencia de presiones que produzca la sustentación necesaria para que el UAV vuele.En esta sección se harán estudios sobre que geometría es la más adecuada así como de losdispositivos de control que en ella se incorporar (flaps, alerones y spoilers).
3.3.1. Forma en planta
A partir de los valores de referencia tomados del X-Vision se hizo una primera estimaciónde las proporciones que debían guardar los distintos elementos del avión para el tamañodeseado. Los valores obtenidos fueron: superficie alar S = 1,29m2, envergadura b = 3m yalargamiento b2/S = Λ = 6,98.
Una vez obtenidos estos datos y se dió un valor un poco mayor a la envergadura del ala,sobredimensionándola de manera que el UAV tenga cierta similitud con un planeador. Unavez hecho esto se disminuyó el valor de la cuerda, para mantener el valor de la superficiealar. Por tanto, las dimensiones definitivas fueron: superficie alar S = 1,29m2, envergadurab = 3,2m y alargamiento b2/S = AR = 7,94.
Una vez conocidas las dimensiones se pasó al estudio de la forma en planta del ala. Segúnla teoría de Prandtl, el ala más eficiente es el ala elíptica, por lo que a mayor similitud conesta mejores serán los resultados obtenidos. En este caso se tratará de llegar a un compromisoentre eficiencia y dificultad de montaje para lograr un resultado óptimo.
Se hizo un estudio comparativo de tres formas en planta: ala rectangular, ala con unestrechamiento y ala con dos estrechamientos. Las formas en planta son las que están repre-sentadas en la Figura (3.13). El programa utilizado para el análisis ha sido de nuevo XFLR5,tomando como método 3D Panels y analizando las características de cada ala con un barridode ángulo de ataque entre −10◦ y 20◦ y un incremento de 0,5◦ para apreciar las zonas dondese produce la entrada en pérdida. Los estudios fueron hechos a una velocidad de 20 m/s.
Las características geométricas de cada una de las alas son las siguientes:
23

Ala rectangular:
• b=3.2 m• S=1.28 m2
• M.A.C.=0.4 m• AR=8
Ala con un estrechamiento:
• b=3.2 m• S=1.296 m2
• M.A.C.=0.412 m• AR=7.901
Ala con dos estrechamientos:
• b=3.2 m• S=1.272 m2
• M.A.C.=0.404 m• AR=8.05
(a) Ala rentangular.
(b) Ala con un estrechamiento.
(c) Ala con dos estrechamientos.
Figura 3.13: Estudio de la forma en planta del ala.Las alas incluidas en la figura son las correspondientes a los tres estudios realizados para lacomparación de la forma en planta. Se puede apreciar como al ir aumentando el número de
estrechamientos el ala va tomando una forma parecida al ala elíptica.
24

Una vez fueron hechos los análisis en XFLR5, se exportaron los datos y representaron lascurvas características en MATLAB para poder realizar una comparación entre los tres casosy escoger cual presenta mejores resultados para los requisitos impuestos.
(a) CL frente α. (b) CL frente α ampliada.
Figura 3.14: Estudio de forma en planta. CL frente α.Como se observa en la figura, las tres alas presentan una curva de sustentación
prácticamente idéntica, siendo un poco mejor la del caso del ala con dos estrechamientos.
(a) CL frente CD. (b) CL frente CD ampliada.
Figura 3.15: Estudio de forma en planta. CL frente CD.En la gráfica ampliada (b) se puede ver que la polar del ala para el caso del ala rectangular
es peor que en el caso de ala con estrechamiento. En este caso el ala con uno y dosestrechamientos presenta prácticamente los mismos resultados, siendo la de dos
estrechamientos mejor.
25

(a) Estudio de forma en planta. CL/CD frente α. (b) Estudio de forma en planta. CL/CD frente α am-pliada.
Figura 3.16: Estudio de forma en planta. CL/CD frente α.En las gráficas anteriores se representa la eficiencia de las alas. Queda reflejado que el ala
con uno y dos estrechamientos presenta mayor eficiencia que en el caso del ala rectangular,siendo por un poco mejor la de dos estrechamientos.
(a) CDi frente α. (b) CDi frente α ampliado.
Figura 3.17: Estudio de forma en planta. CDi frente α.Se observa que los casos de ala con estrechamiento generan menor resistencia inducida y
que el caso de uno y dos estrechamientos es prácticamente igual.
26

(a) CDp frente α. (b) CDp frente α ampliado.
Figura 3.18: Estudio de forma en planta. CDp frente α.El caso del ala con tres estrechamientos es el caso que menor resistencia parásita tiene.
(a) CDT frente α. (b) CDT frente α.
Figura 3.19: Estudio de forma en planta. CDTfrente α.
Vuelven a obtenerse mejores resultados con un ala con estrechamiento, independientementede si es uno o dos.
Una vez representadas y comparadas las curvas características de cada uno de los casos sedecide utilizar un ala con estrechamiento, ya que presenta ventajas en comparación con el casodel ala rectangular. Si se hace una comparación entre el caso de uno y dos estrechamientos, sepuede observar que las mejoras que proporciona la de dos estrechamientos es muy pequeña.Por otra parte, la construcción de un ala con dos estrechamiento es más complicada que la deuno. Se decide utilizar un ala con un estrechamiento, ya que presenta buenas característicasaerodinámicas y además es más sencilla de fabricar, logrando así alcanzar el compromisoentre dificultad y calidad.
27

3.3.2. Posicion del estrechamiento
Una vez seleccionada la forma en planta se pasó a hacer un estudio exhaustivo de quecaracterísticas debía tener la misma para proporcionar los mejores resultados. El primero deellos fue calcular en que zona debía situarse el estrechamiento. De nuevo se hizo un estudiocomparativo entre tres posibilidades distintas (Figura 3.20).
(a) Caso 1. Ala con estrechamiento a 0.5 m del encastre.
(b) Caso 2. Ala con estrechamiento a 0.6 m del encastre.
(c) Caso 3. Ala con estrechamiento a 0.7 m del encastre.
Figura 3.20: Estudio de la posición del estrechamiento.Las alas incluidas en la figura son las correspondientes a los tres estudios realizados para
comprobar cuál es la posición óptima en el caso de un ala con un estrechamiento.
Tras analizar todos los casos en XFLR5 y exportar las gráficas los resultados obtenidosfueron los siguientes:
(a) CL frente α. (b) CL frente α ampliada.
Figura 3.21: Estudio de la posición del estrechamiento. CL frente α.El ala del caso 3 es la que más sustentación aporta, siendo el caso 1 el que menos.
28

(a) CL frente CD. (b) CL frente CD ampliado.
Figura 3.22: Estudio de la posición del estrechamiento. CL frente CD.La polar con mejores características es la del ala del caso 1, siendo es este caso la peor el
caso 3.
(a) CL/CD frente α. (b) CL/CD frente α ampliada.
Figura 3.23: Estudio de la posición del estrechamiento. CL/CD frente α.En cuanto a la eficiencia, el caso 1 es el que mayor eficiencia proporciona, siendo
prácticamente iguales los casos a medida que aumenta el ángulo de ataque.
29
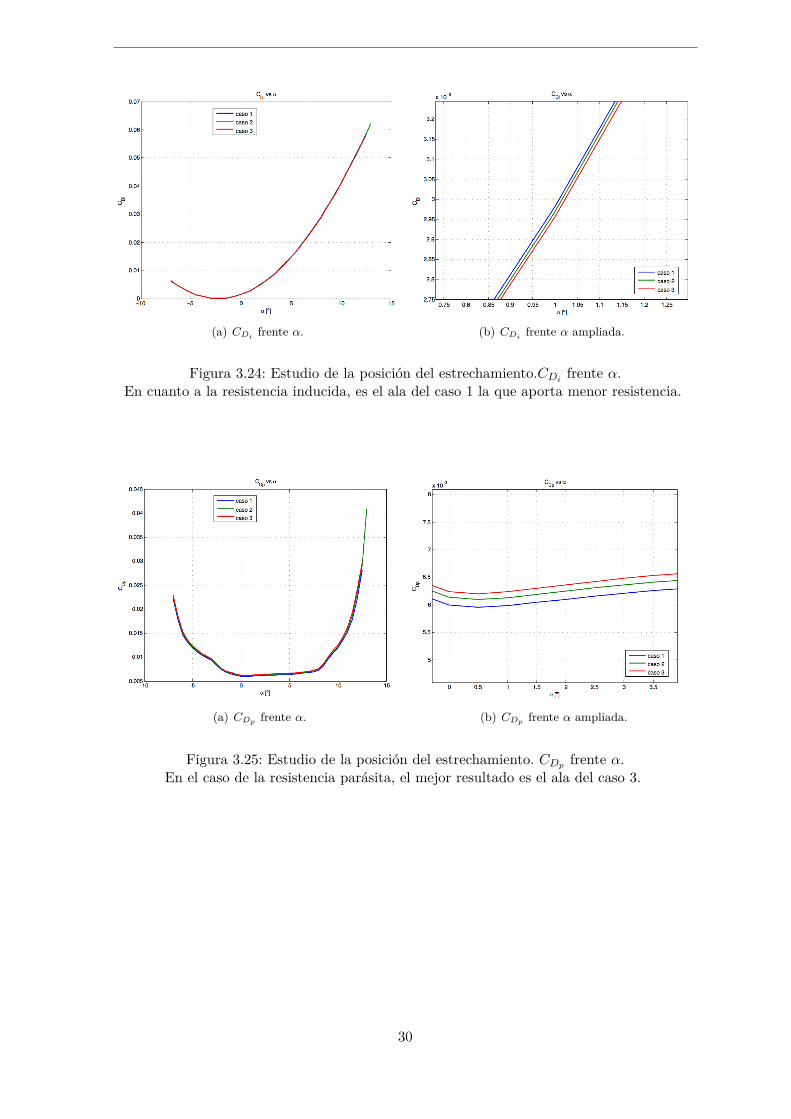
(a) CDi frente α. (b) CDi frente α ampliada.
Figura 3.24: Estudio de la posición del estrechamiento.CDi frente α.En cuanto a la resistencia inducida, es el ala del caso 1 la que aporta menor resistencia.
(a) CDp frente α. (b) CDp frente α ampliada.
Figura 3.25: Estudio de la posición del estrechamiento. CDp frente α.En el caso de la resistencia parásita, el mejor resultado es el ala del caso 3.
30

(a) CDT frente α. (b) CDT frente α ampliada.
Figura 3.26: Estudio de la posición del estrechamiento. CDTfrente α.
Observando la resistencia total, el ala del caso 3 es la que mejores resultados proporciona.
Tras este estudio se puede afirmar que ambos casos presentan características muy pare-cidas pero a la hora de elegir uno de los casos se decidió optar por el tercero. Aunque elprimer caso presenta unos resultados mejores en algunos casos, el caso 3 proporciona mayorsustentación y menor resistencia. Por lo tanto, la forma en planta del ala del UAV será la delcaso 3 de la Figura 3.20, siendo las características de las tres muy parecidas.
3.3.3. Torsión
Se realiza también un estudio de la torsión del ala. Es muy importante debido a quese puede utilizar para evitar la entrada en pérdida de las puntas del ala. Se realizó unacomparación entre varios casos en XFLR5 para poder escoger el caso que mejores resultados.
Figura 3.27: Estudio de la torsión. CL frente α.El ala con 2◦ en el encatre presenta mayor sustentación debido a que al tener ángulo de
incidencia en el encastre el ángulo que ve el ala es mayor y por lo tanto la curva desustentación se desplaza hacia la izquierda. El ala con torsión negativa en las puntas
sustenta un poco menos que el caso sin torsión.
31

Figura 3.28: Estudio de la torsión. CL frente CD.En cuanto a la polar, todos los casos proporcionan unos resultados parecidos, siendo el caso
de menor CD0 el del ala con torsión y 0◦ en el encastre.
Figura 3.29: Estudio de la torsión. CL/CD frente α.El valor de la eficiencia es prácticamente igual en todos los casos, solo que su máximo se da
a diferentes ángulos de ataque.
32

Figura 3.30: Estudio de la torsión. CDi frente α.El caso con menor resistencia inducida es el del ala con 0◦ de torsión en el encastre, ya queel ángulo de ataque que ve esta zona es menor que en el resto de los casos. El caso del alasin torsión vería el mismo ángulo de ataque pero, al existir en el otro caso torsión en las
puntas, se retrasa la entrada en pérdida, lo que se ve traducido a una disminución deresistencia inducida a mayores ángulos de ataque.
Figura 3.31: Estudio de la torsión. CDp frente α.Ocurre algo similar al caso anterior con la resistencia parásita, siendo de nuevo el caso de
menor resistencia el de 0◦ en el encastre y −2◦ en las puntas.
33

Figura 3.32: Estudio de la torsión. CDTfrente α.
La resistencia total mínima es el caso del ala de 0◦ en el encastre y −2◦ en las puntas de ala.
En este caso se toma como decisión utilizar un ala con torsión de 2◦ negativa en laspuntas. Aunque sea el caso que menor sustentación proporcione (Figura 3.27) es la que menorresistencia aporta (Figuras 3.30, 3.31 y 3.35).
3.3.4. Diedro
En cuanto al diedro se escoge un valor de 2◦. El diedro es un factor que afecta a laestabilidad lateral-direccional de la aeronave, por lo tanto su valor se determinará en funciónde las necesidades de la sección de estabilidad. Aun así se realiza una comparación en XFLR5entre un ala con diedro y una sin diedro, para demostrar que no afecta a ningún aspectoaerodinámico.
34

(a) CL frente α. (b) CL frente CD.
(c) CL/CD frente α. (d) CDi frente α.
(e) CDp frente α. (f) CDT frente α.
Figura 3.33: Estudio del diedro.Comparación de las curvas aerodinámicas para el ala seleccionada sin diedro y con un
diedro de 2◦.
35

3.3.5. Flecha
El ala escogida carece de flecha de borde de de salida aunque si que tiene de borde deataque debido a la presencia del estrechamiento. La flecha se utiliza principalmente en alasen régimen supersónico para disminuir la resistencia aunque también tiene como funciónaumentar la estabilidad. La utilización de flecha permite aumentar el margen estático alretrasar el centro aerodinámico del ala.
Para el ala en cuestión se utiliza una flecha Λc/4 = 5,365◦.
3.3.6. Combinación de perfiles
Por último se optó por utilizar una combinación de perfiles en el ala para mejorar lascaracterísticas teniendo en cuenta las solicitaciones del UAV. Utilizando un perfil con unespesor mayor en el centro y con un espesor menor en las puntas de ala.
El perfil escogido hasta ahora es un perfil con un espesor del 12 %. Se utilizará en lazona del encastre un perfil con un espesor mayor (15 %), de manera que aunque aumente laresistencia se retrasará la entrada en pérdida desplazándose hacia el borde de salida del ala,al tener el perfil un espesor mayor.
De esta manera, se conseguirán combinar las ventajas de utilizar un perfil con mayorespesor para retrasar la entrada en pérdida del ala y a su vez un perfil con un espesor menoren las puntas que posee menor resistencia y mayor sustentación, aliviándose el peso en laspuntas, de manera que se ayudaba a que la entrada en pérdida comience por la zona delencastre.
El perfil escogido para situarse en el centro es el GA35A315 y el de las puntas el yaseleccionado anteriormente, GA35A312, siendo esta combinación similar a la utilizada en elX-Vision.
3.3.7. Ala escogída
Por tanto, el ala escogida será la representada en la Figura 3.34,
Figura 3.34: Características geométricas del ala.
Y las características de la misma que se utilizarán de aquí en adelante serán:
b=3.2 m
cr = 0,46 m
36

ct = 0,26 m
E = 0,565
S=1.29 m2
M.A.C.=0.414 m
AR=7.96
Λc/4 = 5,356◦
3.3.8. Superficies de control
En cuanto a las superficies de control de ala se decidió utilizar flaperones. Estos son untipo de superficie de control que se pueden utilizar como alerones, flaps y spoilers. La principalventaja que presentan es la reducción del peso del avión, así como la reducción de complejidada la hora de construir la aeronave.
Para determinar la superficie que será necesaria para un buen control de la aeronave seutilizó el documento de excel ”Calculador de diseño de aviones” [2]. Este documento permiteintroducir la geometría de la aeronave y calcular las relaciones entre las distintas superficies delmismo según sean las características del ala (superficie, envergadura, peso, etc). Se utilizaráa lo largo del diseño de la aeronave para calcular las dimensiones de los estabilizadores y losdispositivos de control del UAV.
Hay que tener en cuenta que los datos obtenidos tienen un margen de error debido a quela geometría introducida en este calculador no es exactamente igual que la del ala en cuestión.Sin embargo, se tomará este error como pequeño y se darán los resultados obtenidos comoválidos. Los flaperones tendrán las siguientes características:
ca= 0.046 m
ba= 1.25 m
Aa= 0.0575 m2
Figura 3.35: Colocación y dimensiones del flaperon en el ala.
Posteriormente se ubicaron los flaperones en el ala en XFLR5 y se hizo un estudio delcomportamiento de la misma para un rango de deflexión simétrico de los flaperones entre−10◦ y 20◦, tal y como se muestra en la Figura 3.36.
37

Figura 3.36: Perfil con flaperones.En la Figura está representado el borde de salida del perfil. Se ven de distintos colores los
ángulos de deflexión estudiados de los flaperones para el perfil GA35A312.
Una vez analizados todos los perfiles con deflexión de los flaperones en XFLR5 tal y comose hizo en la sección de perfiles, se procedió a realizar el estudio para el caso de ala paracomprobar de que manera afectaría la deflexión de los dispositivos en la aerodinámica de laaeronave. Los dispositivos estudiados en este caso están deflectados de manera simétrica, porlo que el estudio corresponde a flaps.
Figura 3.37: Análisis de los flaperones. CL frente α.El caso de flaps = 0◦ es el caso estudiado anteriormente. Se observa que la curva de
sustentación se desplaza hacia la izquierda a medida que la deflexión de los flaps es mayor.Esto se debe a que al aumentar la superficie y la curvatura el ala sustenta más, para evitarque entre en pérdida a bajas velocidades. Por el contrario, al deflectar los flaps con ángulo
negativo, se rompe la sustentación del ala, frenando la velocidad de vuelo y disminuyendo lasustentación (la curva se desplaza hacia la derecha).
38

Figura 3.38: Análisis de los flaperones. CL frente CD.La polar del UAV. El caso que menor resistencia presenta es el del ala con los flaperones sin
deflectar.
Figura 3.39: Análisis de los flaperones. CL/CD frente α.La eficiencia es mayor para el caso del ala con flaps sin deflectar.
39
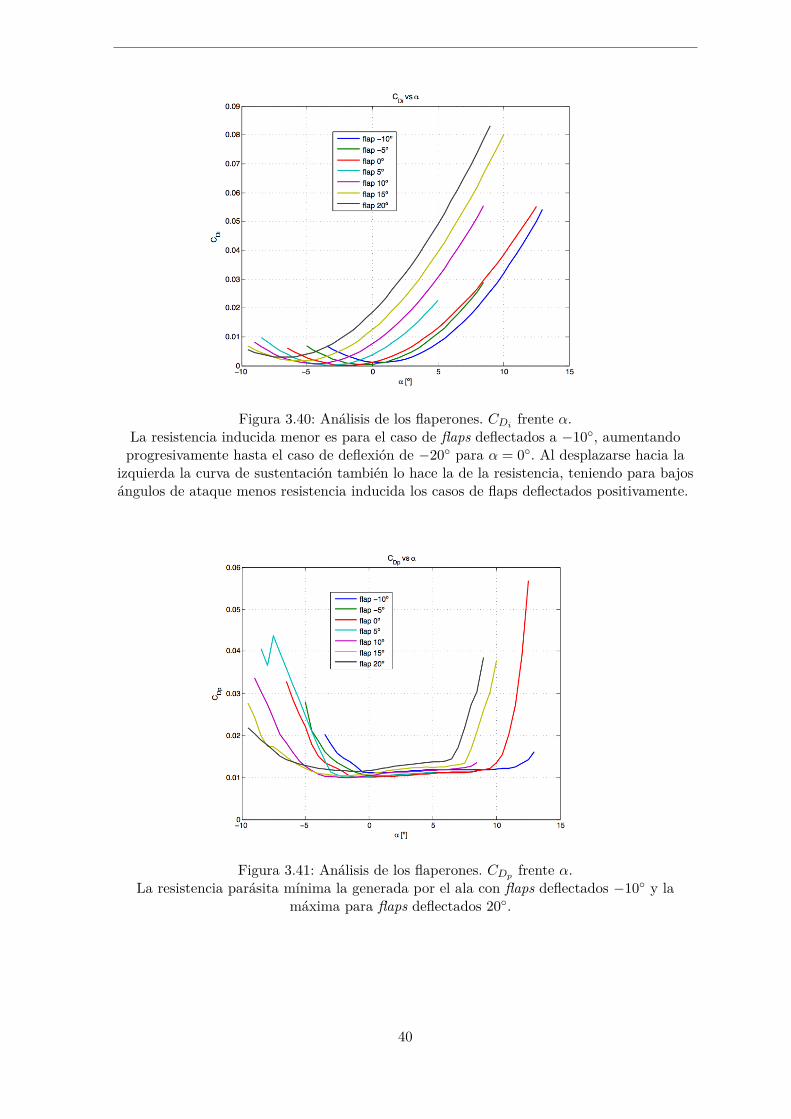
Figura 3.40: Análisis de los flaperones. CDi frente α.La resistencia inducida menor es para el caso de flaps deflectados a −10◦, aumentando
progresivamente hasta el caso de deflexión de −20◦ para α = 0◦. Al desplazarse hacia laizquierda la curva de sustentación también lo hace la de la resistencia, teniendo para bajosángulos de ataque menos resistencia inducida los casos de flaps deflectados positivamente.
Figura 3.41: Análisis de los flaperones. CDp frente α.La resistencia parásita mínima la generada por el ala con flaps deflectados −10◦ y la
máxima para flaps deflectados 20◦.
40

Figura 3.42: Análisis de los flaperones. CDTfrente α.
En cuanto a la resistencia total, de nuevo ocurre algo similar al caso de la resistenciainducida. El caso que menor resistencia presenta es el caso de flaps deflectados −10◦ para
α = 0◦.
3.4. Estudio de los estabilizadoresPara la selección de los estabilizadores se empleó de nuevo el Çalculador de diseño de
aviones"del documento de excel. Una vez introducidas la geometría del ala y el peso del aviónse seleccionaron las superficies de ambos estabilizadores teniendo en cuenta el porcentajede superficie alar que le correspondía. Para la selección de este porcentaje se comenzó aiterar utilizando estabiliadores con características similares al X-Vision. Una vez avanzadosen el resto de campos de estudio del proyecto, se realimentó con las áreas de estructuras yestabilidad, para la localización correcta de los estabilizadores con el fin de situar el centrode gravedad.
3.4.1. Estabilizador horizontal
Una vez hecho el dimensionado del estabilizador se estudió en XFLR5 para calcular suscaracterísticas aerodinámicas, que se utilizarán para estudiar la estabilidad longitudinal dela aeronave. Las características geométricas del estabilizador son:
b=1 m
cr=0.3 m
S=0.25 m2
M.A.C.=0.25 m
AR=4
41
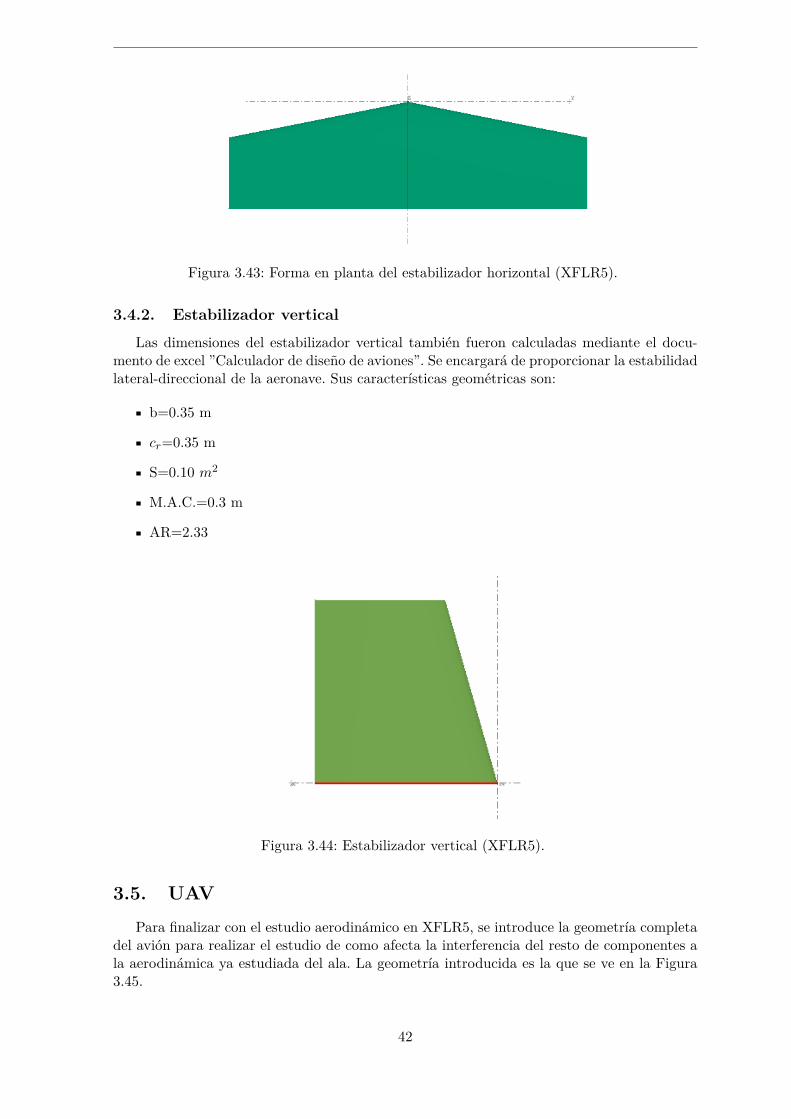
Figura 3.43: Forma en planta del estabilizador horizontal (XFLR5).
3.4.2. Estabilizador vertical
Las dimensiones del estabilizador vertical también fueron calculadas mediante el docu-mento de excel ”Calculador de diseño de aviones”. Se encargará de proporcionar la estabilidadlateral-direccional de la aeronave. Sus características geométricas son:
b=0.35 m
cr=0.35 m
S=0.10 m2
M.A.C.=0.3 m
AR=2.33
Figura 3.44: Estabilizador vertical (XFLR5).
3.5. UAVPara finalizar con el estudio aerodinámico en XFLR5, se introduce la geometría completa
del avión para realizar el estudio de como afecta la interferencia del resto de componentes ala aerodinámica ya estudiada del ala. La geometría introducida es la que se ve en la Figura3.45.
42

Figura 3.45: UAV en XFLR5.
Figura 3.46: Estudio UAV. CL frente α.La sustentación que genera el avión completo en comparación con el ala es un poco
superior, debido a que incorpora el estabilizador horizontal, que aumenta la sustentación,pero a su vez se ve disminuida un poco por la presencia del fuselaje, por lo que la diferencia
entre ambos casos es mínima.
43

Figura 3.47: Estudio UAV. CL frente CD.La polar del avión empeora debido a la presencia del fuselaje.
Figura 3.48: Estudio UAV. CL/CD frente α.También se aprecia una disminución en la eficiencia con respecto a la del ala. El UAV
deberá volar en un rango de ángulos de ataque entre 0◦ y 5◦, debido a que en esta zona esdonde mayor eficiencia aerodinámica presenta.
44

Figura 3.49: Estudio UAV. CDi frente α.La resistencia inducida es menor en el caso del ala que del UAV completo.
Figura 3.50: Estudio UAV. CDp frente α.La resistencia parásita es menor en el caso del ala que en el del UAV completa.
45

Figura 3.51: Estudio UAV. CDTfrente α.
La resistencia total del UAV es mayor que en la del caso del ala sola.
3.5.1. Estudio aerodinámico del UAV.
En este apartado se determinará el coeficiente de Oswald del avión y la polar, empleandolos datos obtenidos anteriomente mediante XFLR5. De las gráficas se obtiene CD0 = 0,01014,valor muy importante en el cálculo de la polar del avión.
Para el cálculo del coeficiente de Oswald se utiliza el procedimiento incluido en los apuntesde la referencia [6]. Se define el coeficiente de Oswald como:
e = 1,1CLα
RCLα + (1 −R)πARSiendo
R = a1λ31 + a2λ
21 + a3λ1 + a4
donde a1 = 0,0004, a2 = −0,0080, a1 = 0,0501 y a4 = 0,8642. A su vez, λ1 = AREcosΛLE
.
Una vez resueltas estas ecuaciones, se obtiene un valor de coeficiente de Oswald e = 0,963.
Por otra parte, se realiza el estudio de la polar parabólica compensada del UAV. Existela posibilidad de realizar el cálculo de la polar parabólica de coeficientes constantes (CD =CD0 +KC2
L), pero el caso de la polar compensada en mucho más completo y contabiliza mejorla resistencia, con lo que a la hora de realizar cálculos con estos valores se estará trabajandosobre seguro.
CD = CDmin +K(CL + CLmindrag)2 = CD0 +K1C
2L −K2CL
Donde K1 = K = 1πARe y K2 = 2KCLmindrag
. El coeficiente CLmindrag, coeficiente de
resistencia mínima, se obtiene de las gráficas correspondientes al UAV extraídas de XFLR5,
46

considerando que el ángulo de ataque para el que se produce la mínima resistencia es igualal que produce la mínima resistencia para el perfil del ala. La expresión de la polar queda dela siguiente manera:
CD = CD0 + 0,0417C2L − 0,03CL
47

48

Capítulo 4
Estructuras
4.1. IntroducciónSe describirá en este capítulo la estructura de la aeronave completa. Se hace un estudio
de cómo se distribuirán los pesos en el UAV, ya que esto influirá al cálculo del centro degravedad de la aeronave. Para ello, se selecciona que material es el más adecuado para cadauno de los componentes según su peso, geometría y las solicitaciones a las que esté expuesto.Posteriormente, se realizará una maqueta en CATIA, mediante la cual se pueden extraer lospesos de las piezas de la aeronave y por tanto la posición del centro de gravedad, que seráfundamental para definir la estabilidad del avión.
Cabe añadir que la selección de materiales se hizo teniendo en cuenta la restricción depesos definida en el capítulo de Introducción de este trabajo, teniendo en cuenta que elpeso no puede superar 25 Kg, debido a que los UAV con peso mayor a 25 Kg necesitanpresentar Certificado de Aeronavegabilidad entre otros requisitos, que restringen su campode aplicaciones.
También se incluye en este capítulo la ubicación de los refuerzos en las zonas que esténexpuestas a esfuerzos mayores, como son el borde de ataque y salida del ala o la bancadadel motor.Se realizarán cálculos acerca de los esfuerzos que sufren los rigidizadores paracomprobar que cumplen su función.
En cuanto a la distribución de este capítulo, enla sección (4.2) se hará breve introducciónsobre el tipo de materiales que se va a utilizar para cada componente de la aeronave ysus características generales. En la siguiente, (4.3), se decribá cada componente indicandosu estructura y el material del que se va a fabricar. Posteriormente, en la sección (4.4) sedescribirá el proceso de montaje de la aeronave a grandes rasgos. El desglose de pesos sehará una vez definido cada componente, en la sección (4.5) y posteriormente se definirá elcentro de gravedad (4.6). Por último, en la sección (4.7), se hace un cálculo sobre los esfuerzosestructurales máximos que debe soportar la aeronave y se indican las zonas donde se han decolocar los refuerzos. Todos estos cálculos han sido hechos basándose en la Teoría de Barrasde la Resistencia de Materiales. Para obtener resultados más concisos se debería hacer uncálculo en un programa de elementos finitos.
4.2. MaterialesLos materiales utilizados en el UAV serán materiales compuestos para el revestimiento de
zonas como son el fuselaje, el ala, la cola,etc. Estos materiales presentan enormes ventajasdebido a que proporcionan una gran resistencia frente a un peso ligero. En concreto, seutilizarán fibra de carbono y fibra de vidrio.
49

Para las cuadernas y refuerzos interiores, se empleará contrachapado de madera de balsa.También se utilizarán materiales como el poliestireno expandido para estructuras como sonlas alas y aluminio y caucho para el tren de aterrizaje.
La densidad de cada uno de los materiales será necesaria para realizar el cálculo de lospesos en CATIA. Los valores de densidad son los siguientes:
Fibra de carbono → ρ = 1550 kg/m2
Fibra de vidrio → ρ = 1900 kg/m2
Rohacell → ρ = 16 kg/m2
Poliestireno expandido de baja densidad → ρ = 16 kg/m2
Contrachapado de madera de balsa → ρ = 617,4 kg/m2
Aluminio → ρ = 2698,4 kg/m2
Caucho → ρ = 950 kg/m2
4.3. Estructuras
4.3.1. Fuselaje
Como se comentó en el capítulo de Diseño, la estructura del fuselaje consistirá en unaestructura bicasco. De esta manera se permite desmontar la aeronave en caso de que fueranecesario para facilitar su transporte o para tener un fácil acceso a la zona del morro. Ambaspartes se muestran en la Figura 4.9, del modelo del UAV en CATIA.
(a) Zona de morro del fuselaje. (b) Parte trasera del fuselaje.
Figura 4.1: Piezas del fuselaje.
Para la selección del material se decidió utilizar un material compuesto, debido a que surelación resistencia-peso es muy buena. En primer lugar se planteó poder hacerlo de fibrade vidrio o fibra de carbono. Ésta última presenta una serie de ventajas frente a la fibra devidrio debido a que es más resistente y menos pesada. Sin embargo, es mucho más frágil ymás costosa, por lo que la fibra de vidrio se ajustaba mejor a las solicitaciones.
Por otra parte, con un fuselaje demasiado delgado podría ser necesario la utilización delarguerillos para hacer más resistente la estructura. Esto penalizaría el peso, que es una de lasrestricciones más importantes, por lo que se decidio utilizar la fibra de vidrio como material
50

compuesto tipo sandwich, fibra de vidrio con núcleo de rohacell. Este tipo de materialesproporcionan una elevada relación resistencia-peso y absorción de energía ante impactos.
El material tipo sandwich está formado por pieles delgadas de fibra de vidrio, que seráel material de recubrimiento, unido a un material de relleno ligero, como es el rohacell. Esteúltimo es el núcleo o rigidizante y se incorpora para aumentar el volumen de la superficie,consiguiendo así un aumento del momento de inercia de la sección sin penalizar al peso. Suestructura es similar a la representada en la Figura 4.2.
Figura 4.2: Sandwich fibra de vidrio y Rohacell.
La proporción utilizada en el fuselaje es de 1 mm de fibra de vidrio y 2 mm de Rohacell.Las propiedades de este material serán una combinación de las de ambos materiales porseparado.
4.3.1.1. Refuerzos
A pesar de haber utilizado este tipo de material para evitar la utilización de larguerillos,el UAV necesita refuerzos en zonas donde los esfuerzos son elevados, como son la zona delborde de ataque y borde de salida del ala y la bancada del motor. Al colocar los refuerzos seconsigue que estos enfuerzos se repartan por toda la piel de fuselaje.
Para ello se utilizan cuadernas de contrachapado de madera de balsa, material empleadoen la construcción de UAV debido a la elevada resistencia que presenta frente a su pesoliviano, además de que es fácil trabajar con ella.
4.3.1.1.1 Cuaderna de borde de ataque
La cuaderna del borde de ataque consiste en un refuerzo como el representado en la Figura4.3 de contrachapado de madera de balsa de espesor 3 mm.
Figura 4.3: Cuaderna para reforzar la zona del borde de ataque del alaEn la zona superior se pueden ver la zona donde se engancharán los tetones del ala para
fijarla al fuselaje.
51

4.3.1.1.2 Cuaderna de borde de salida
Para reforzar la zona del borde de salida del ala se coloca nuevamente una cuaderna de3 mm de espesor de madera de balsa y para el pylon del motor una de 5 mm de espesor.Debido a la proximidad de estas zonas, se decide unir las cuadernas para conseguir una mayorresistencia. También se añade un taco triangular para reforzar la sujección de la bancada delmotor. Todo esto se ve en la Figura 4.4
(a) Vista frontal. (b) Vista posterior.
Figura 4.4: Cuaderna para el borde de salidad del ala y el motor.En la figura se ve la cuaderna que se situará en la zona de atrás del fuselaje. En la de laizquierda podemos observar quela cuaderna que se ve primero será la que se sitúe en el
borde de salida del ala. En la figura de la derecha, se observa el refuerzo al que va unido labancada del motor. Además, ambos refuerzos presentan un agujero al que irá unido el tubo
de cola.
Otro de los cometidos de las cuadernas es soportar los esfuerzos ejercidos por el tubo decola en el fuselaje. El ala también irá atornillada a este refuerzos en su borde de salida parafijarla al fuselaje.
4.3.1.1.3 Protección inferior
Se decide también ubicar una protección en la parte inferior del fuselaje para facilitar lacolocación de la carga de pago y para proteger el interior del fuselaje en caso de aterrizajeforzoso. Además permite montar el tren de aterrizaje a una superficie más resistente.
Para permitir el acceso al interior por la compuerta de la parte trasera del fuselaje sedivide esta protección en dos partes, como se ve en la Figura 4.5.
52
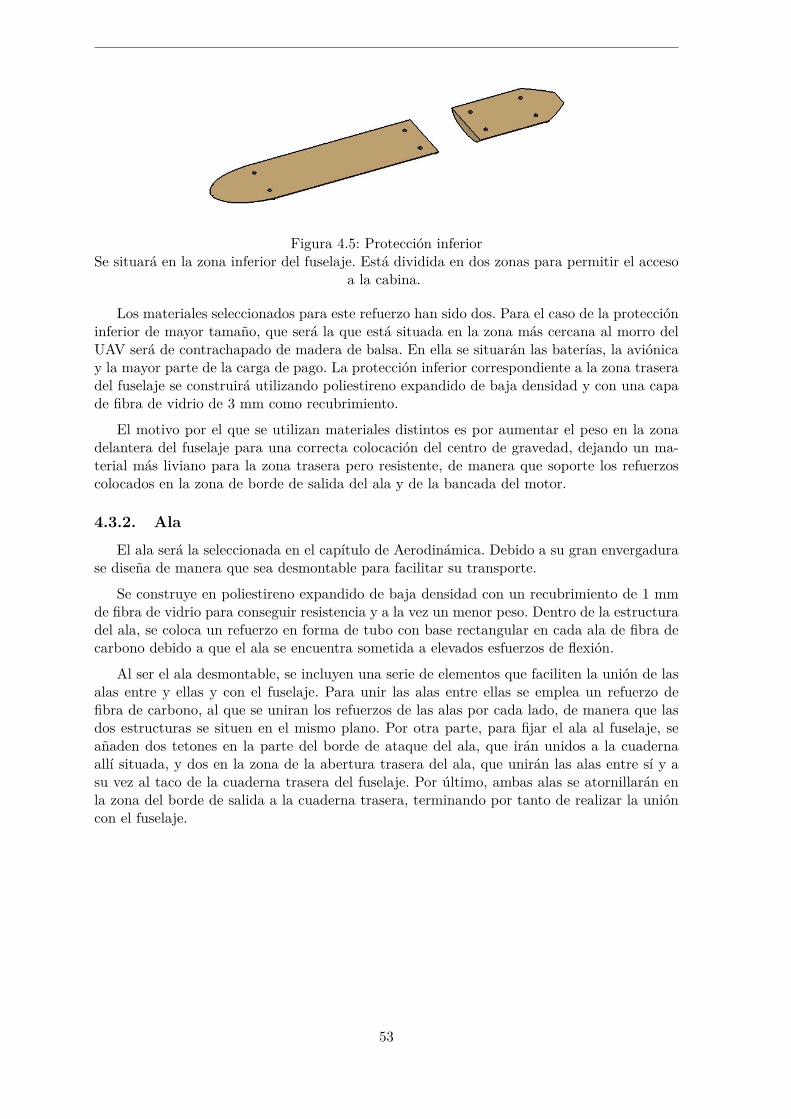
Figura 4.5: Protección inferiorSe situará en la zona inferior del fuselaje. Está dividida en dos zonas para permitir el acceso
a la cabina.
Los materiales seleccionados para este refuerzo han sido dos. Para el caso de la proteccióninferior de mayor tamaño, que será la que está situada en la zona más cercana al morro delUAV será de contrachapado de madera de balsa. En ella se situarán las baterías, la aviónicay la mayor parte de la carga de pago. La protección inferior correspondiente a la zona traseradel fuselaje se construirá utilizando poliestireno expandido de baja densidad y con una capade fibra de vidrio de 3 mm como recubrimiento.
El motivo por el que se utilizan materiales distintos es por aumentar el peso en la zonadelantera del fuselaje para una correcta colocación del centro de gravedad, dejando un ma-terial más liviano para la zona trasera pero resistente, de manera que soporte los refuerzoscolocados en la zona de borde de salida del ala y de la bancada del motor.
4.3.2. Ala
El ala será la seleccionada en el capítulo de Aerodinámica. Debido a su gran envergadurase diseña de manera que sea desmontable para facilitar su transporte.
Se construye en poliestireno expandido de baja densidad con un recubrimiento de 1 mmde fibra de vidrio para conseguir resistencia y a la vez un menor peso. Dentro de la estructuradel ala, se coloca un refuerzo en forma de tubo con base rectangular en cada ala de fibra decarbono debido a que el ala se encuentra sometida a elevados esfuerzos de flexión.
Al ser el ala desmontable, se incluyen una serie de elementos que faciliten la unión de lasalas entre y ellas y con el fuselaje. Para unir las alas entre ellas se emplea un refuerzo defibra de carbono, al que se uniran los refuerzos de las alas por cada lado, de manera que lasdos estructuras se situen en el mismo plano. Por otra parte, para fijar el ala al fuselaje, seañaden dos tetones en la parte del borde de ataque del ala, que irán unidos a la cuadernaallí situada, y dos en la zona de la abertura trasera del ala, que unirán las alas entre sí y asu vez al taco de la cuaderna trasera del fuselaje. Por último, ambas alas se atornillarán enla zona del borde de salida a la cuaderna trasera, terminando por tanto de realizar la unióncon el fuselaje.
53
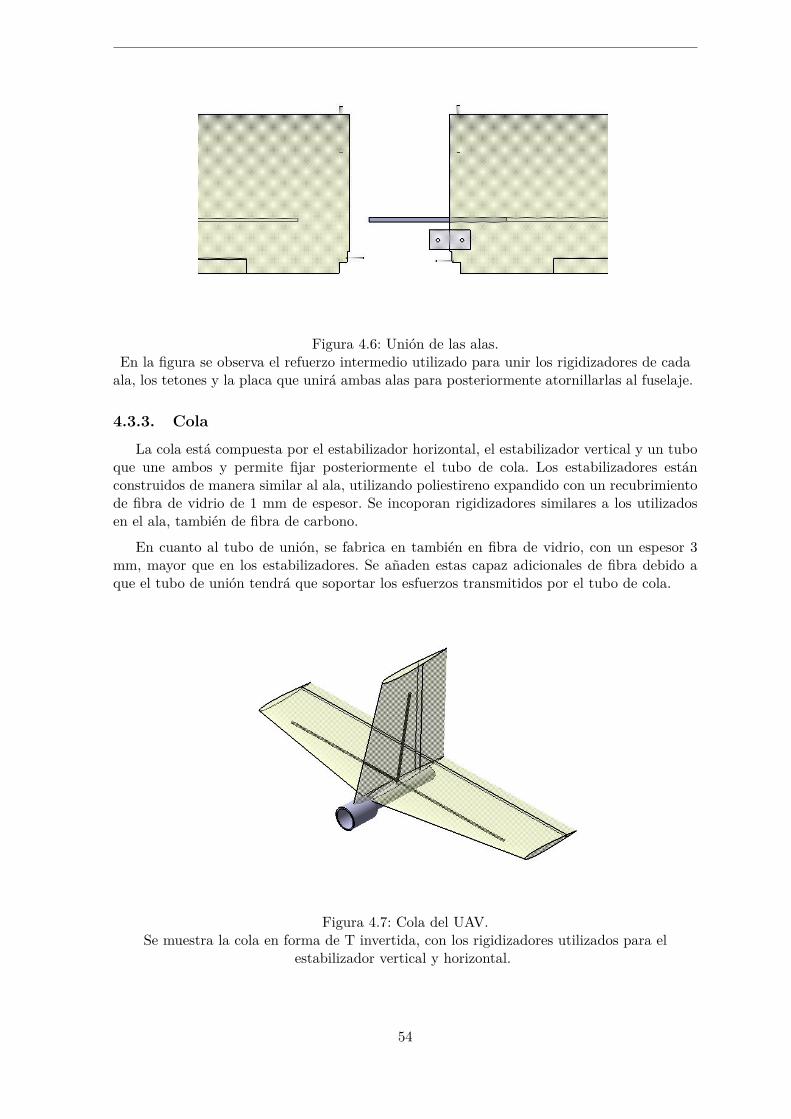
Figura 4.6: Unión de las alas.En la figura se observa el refuerzo intermedio utilizado para unir los rigidizadores de cada
ala, los tetones y la placa que unirá ambas alas para posteriormente atornillarlas al fuselaje.
4.3.3. Cola
La cola está compuesta por el estabilizador horizontal, el estabilizador vertical y un tuboque une ambos y permite fijar posteriormente el tubo de cola. Los estabilizadores estánconstruidos de manera similar al ala, utilizando poliestireno expandido con un recubrimientode fibra de vidrio de 1 mm de espesor. Se incoporan rigidizadores similares a los utilizadosen el ala, también de fibra de carbono.
En cuanto al tubo de unión, se fabrica en también en fibra de vidrio, con un espesor 3mm, mayor que en los estabilizadores. Se añaden estas capaz adicionales de fibra debido aque el tubo de unión tendrá que soportar los esfuerzos transmitidos por el tubo de cola.
Figura 4.7: Cola del UAV.Se muestra la cola en forma de T invertida, con los rigidizadores utilizados para el
estabilizador vertical y horizontal.
54

4.3.4. Tubo de cola
El tubo de cola está fabricado en fibra de carbono, debido a que es un material muyresistente con un peso menor que la fibra de vidrio. El tubo es el representado en la Figura4.8, con un diámetro exterior de 60 mm y un espesor de 3 mm.
Figura 4.8: Tubo de cola.
4.3.5. Tren de aterrizaje
En cuanto al tren de aterrizaje, es un tren tipo triciclo. Se ha utilizado para su construcciónaluminio, que es un materiales típico para este tipo de construcciones, debido a su alta relaciónresistencia peso. Para las ruedas se utilizó caucho.
(a) Tren de aterrizaje, rueda delantera. (b) Tren de aterrizaje, rueda trasera.
Figura 4.9: Tren de aterrizaje.
La colocación del tren de aterrizaje se definirá una vez calculado el centro de gravedad,de manera que la parte de la rueda delantera se encuentre antes del centro de gravedad y latrasera detrás del mismo sin producir momento, manteniéndolo así en la misma posición.
55
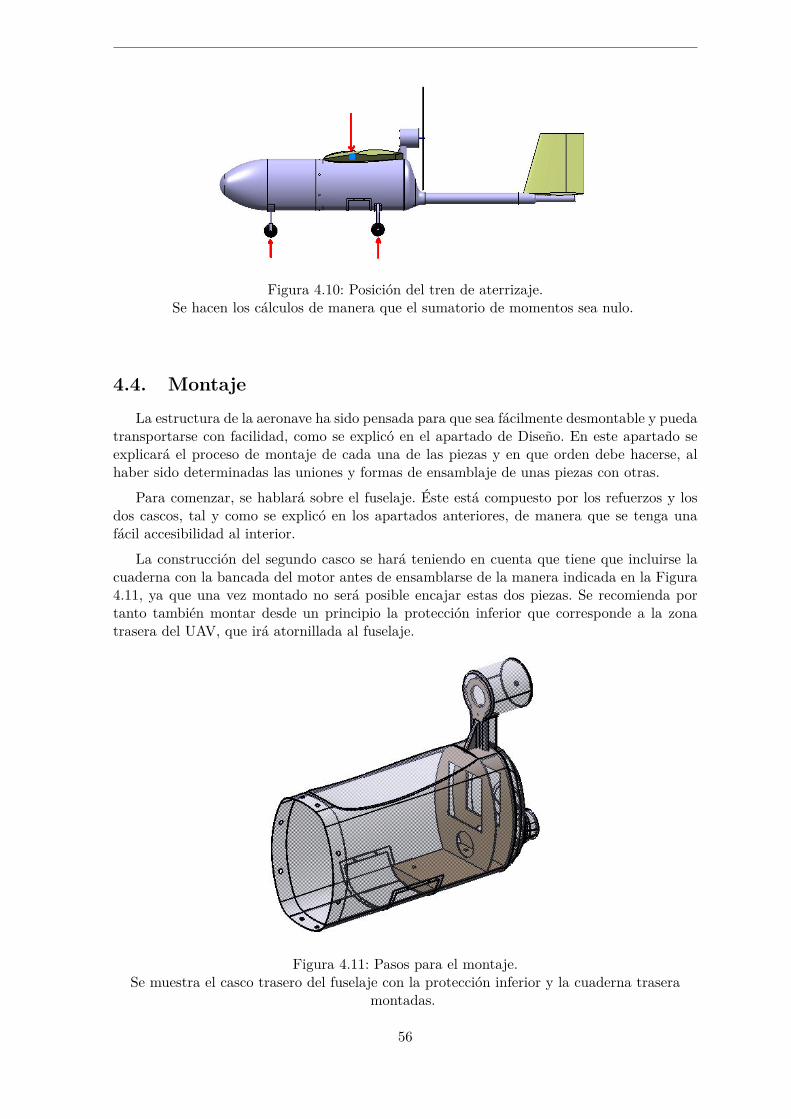
Figura 4.10: Posición del tren de aterrizaje.Se hacen los cálculos de manera que el sumatorio de momentos sea nulo.
4.4. MontajeLa estructura de la aeronave ha sido pensada para que sea fácilmente desmontable y pueda
transportarse con facilidad, como se explicó en el apartado de Diseño. En este apartado seexplicará el proceso de montaje de cada una de las piezas y en que orden debe hacerse, alhaber sido determinadas las uniones y formas de ensamblaje de unas piezas con otras.
Para comenzar, se hablará sobre el fuselaje. Éste está compuesto por los refuerzos y losdos cascos, tal y como se explicó en los apartados anteriores, de manera que se tenga unafácil accesibilidad al interior.
La construcción del segundo casco se hará teniendo en cuenta que tiene que incluirse lacuaderna con la bancada del motor antes de ensamblarse de la manera indicada en la Figura4.11, ya que una vez montado no será posible encajar estas dos piezas. Se recomienda portanto también montar desde un principio la protección inferior que corresponde a la zonatrasera del UAV, que irá atornillada al fuselaje.
Figura 4.11: Pasos para el montaje.Se muestra el casco trasero del fuselaje con la protección inferior y la cuaderna trasera
montadas.
56

Como puede observarse en la Figura 4.12, el refuerzo que lleva unido la bancada delmotor encaja en el fuselaje de manera que no puede colocarse una vez el casco del fuselajeesté montado por completo.
Figura 4.12: Zona de colocación del motor.Detalla que muestra como encaja la cuaderna de refuerzo para la sujección del motor con el
fuselaje.
Una vez colocadas estas piezas, se prosigue situando la pieza de protección inferior delan-tera en el casco trasero del fuselaje. Ésta servirá para situar la cuaderna correspondiente elborde de ataque del ala antes de cerrar el fuselaje.
Figura 4.13: Pasos para el montaje.Se muestra el siguiente paso, donde se han ensamblado la pieza de protección inferior
delantera y la cuaderna que se coloca en el borde de ataque del ala.
Tras colocar la cuaderna se pasa a montar el ala, ya que estará unida a la cuadernamediante tetones. Al estar el ala dividida en dos piezas, se utiliza un refuerzo adicional paraunir los rigidizadores de las alas. También se hace una unión a la escuadra de la cuadernatrasera, además de atornillar ambas partes al fuselaje. Esto se muestra en la Figura 4.14.
57

Figura 4.14: Pasos para el montaje.
Se muestran a continuación los detalles a tener en cuenta a la hora de fijar el ala al fuselaje(Figura 4.15).
(a) Se muestra como las alas se unen entre si añadiendoel refuerzo que se ve en el centro para unir los rigidi-zadores que incorpora cada ala. También se obrservala placa la que tras la unión de ambas alas, permitiráatornillarlas al fuselaje.
(b) Se pueden observar los tetones que unirán las alaspor la parte trasera entre sí y a su vez al taco del re-fuerzo trasero del fuselaje.
58

(c) La figura muestra los tetones del borde de ataquedel ala que la fijarán a la cuaderna situada en esa zona.
Figura 4.15: Montaje del ala.
Tras montar el ala ya puede pasarse a ensamblar la parte delantera del fuselaje, el primercasco, cuya unión a la otra pieza se hará mediante tornillos. Las Figuras 4.16 y 4.17 muestrancomo se hará esta unión y el resultado final.
Figura 4.16: Unión de los cascos del fuselaje.
Figura 4.17: Fuselaje y ala emsamblados.
Para el montaje del motor, se retira la tapa situada en la zona del fuselaje que cubri-rá el motor para protegerlo y se atornillará al soporte como se indica en la Figura 4.18.Posteriormente se unirá la hélice.
59

(a) Vista del motor ya colocador desde la zonatrasera del UAV.
(b) Vista del motor desde la zona delantera delUAV.
Figura 4.18: Montaje del motor.Se muestra la unión del motor a la bancada mediante tornillos (sin la hélice).
Una vez incluido el motor, se procede a unir la cola al resto de avión mediante el tubode cola y a la colocación del tren de aterrizaje, atornillado al fuselaje. Los resultados finalesserán:
(a) Vista frontal del UAV.
60

(b) Vista trasera del UAV.
Figura 4.19: Montaje finalizado.
4.5. Desglose de pesosSe calcula ahora el peso de cada una de las piezas que conforman la aeronave. Para
ello, una vez hecha su geometría en CATIA se introdujeron los valores de las densidadescorrespondientes a cada material y se asignó a cada pieza el material correspondiente. Semuestra a continuación el desglose de pesos para cada uno de los componentes, que seránecesario a la hora de calcular el centro de gravedad.
Fuselaje Pesos del fuselaje y sus refuerzos.
FuselajeCasco 1 0.413 kgCasco 2 1.044 kgPeso 1.457
RefuerzosCuaderna borde de ataque 0.044 kgCuaderna borde de salida 0.613 kgProtección inferior 0.246 kg (fv y foam)
Cuadro 4.1: Pesos del fuselaje. Se incluyen los pesos de los dos cascos que lo componen y delos refuerzos situados en su interior.
Ala Pesos del ala
AlaAla 3.999 kgRigidizadores 0.256kg
Cuadro 4.2: Pesos del ala.
61

Cola Pesos de la cola.
ColaEstabilizador horizontal 0.893 kgEstabilizador vertical 0.3753 kgDispositivo de unión 0.414 kg
Cuadro 4.3: Pesos de la cola
Tubo de cola Pesos del tubo de cola.
Tubo de cola 0.385 kg
Cuadro 4.4: Peso del tubo de cola.
Tren de aterrizaje Pesos del tren de aterrizaje.
Tren de aterrizajeTren delantero 0.413 kgTren trasero 1.044 kg
Cuadro 4.5: Pesos del tren de aterrizaje.
Motor, baterías y hélice. Peso de los elementos para la propulsión.
Motor 1.08 kg kgBatería 3.801 kg kgHélice 0.074 kg
Cuadro 4.6: Pesos del motor, batería y hélice.
Aviónica Peso de la aviónica.
ESC 0.324 kg kgAutopiloto 0.03 kg kgServomotores 0.05 x 4 kgReceptor RC 0.01 kg
Cuadro 4.7: Pesos del motor, batería y hélice.
Con esto se tiene un peso total de la aeronave de 16.38Kg, que es mucho más bajo quela restricción que estaba impuesta de 25 Kg. Además, al haber dimensionado el UAV paraMTOW = 20 Kg es posible introducir los 4 Kg de carga de pago que se imponían en lorequerimientos iniciales, teniendo un peso total del UAV de 20.38 Kg.
Una vez obtenidos los pesos de los elementos que compondrán la aeronave se realiza undesglose de pesos de los elementos, con y sin carga de pago, como se muestra en las Figuras4.20 y 4.21.
62

Figura 4.20: Desglose de pesos del UAV sin carga de pago.
Figura 4.21: Desglose de pesos del UAV con carga de pago.
4.6. Cálculo del centro de gravedad.Una vez determinados los pesos de cada uno de los componentes así como la posición del
centro de masas de cada uno de ellos se pasa a hacer una suma ponderada para el cálculo dela posición del centro de gravedad.
El centro de gravedad será un punto clave en el diseño del UAV, ya que determinaráel margen estático de la aeronave y por lo tanto la estabilidad. El cálculo de éste punto se
63

realizará mediante las siguientes ecuaciones:
xCG =∑n
i=1mi · xi∑ni=1mi
yCG =∑n
i=1mi · yi∑ni=1mi
zCG =∑n
i=1mi · zi∑ni=1mi
La distribución de masas en el UAV ha sido un proceso iterativo en el que se han idocambiando hasta que se ha conseguido llegar a una solución de compromiso para obtener unaposición adecuada del centro de gravedad.
Para la colocación del centro de gravedad se hicieron varios estudios. El primero fue elestudio de su posición sin incluir carga de pago e incluyendo carga de pago. Debido a lacolocación del motor tras el ala y la longitud del brazo de la cola el centro de gravedadse desplazaba más hacia la cola de lo necesario Por lo que se decidió poner las baterías yla aviónica en la zona del morro del fuselaje, compensando así este retraso del centro degravedad.
Se hizo también un estudio del centro de gravedad al añadir la carga de pago. A la horade incorporar estos 4 Kg de carga de pago es importante hacer una buena distribución en elinterior de la aeronave, intentando colocar de manera equilibrada el peso por delante y detrásdel centro de gravedad.
Se calcula ahora el centro de masas del fuselaje y la cola y se realiza la suma ponderadapara localizar la posición del centro de gravedad.
FuselajeComponente Peso xCG yCG zCG
Cascos 1.457 kg 669.405 mm 0 mm 1.187 mmCuaderna 1 0.044 kg 606.5 mm 0 mm 2.218 mmCuaderna 2 0.613 kg 1048.177 mm 0 mm 47.409 mm
Protección 1 (madera) 1.088 kg 473.554 mm 0 mm -129.555 mmProtección 2 (fibra) 0.071 kg 994.855 mm 0 mm -118.703 mmProtección 2 (poli) 0.011 kg 986.887 mm 0 mm 129.469 mm
Centro de masasFuselaje 3.284 kg 682.47 mm -24.897 mm mm
Cuadro 4.8: Cálculo del centro de masas del fuselaje.
EstabilizadoresComponente Peso xCG yCG zCG
Estabilizador horizontal 0.893 kg 1927.5 mm 0 mm -80 mm mmEstabilizador vertical 0.3753 kg 1940 mm 0 mm 128.177 mm
Tubo de unión 0.131 kg 1829.9 mm 0 mm -80 mmCentro de masas
Cola 1.39993 kg 1921.7 mm 0 mm -13.1989 mm
Cuadro 4.9: Cálculo del centro de masas de la cola.
64

Componente Peso xCG yCG zCG
Fuselaje 3.284 kg 682.47 mm 0 mm -24.897 mmAla 4.255 kg 756 mm 0 mm 150 mmCola 1.39993 kg 1921.7 mm 0 mm -13.1989 mm
Tubo de cola 0.385 kg 1484.735 mm 0 mm -80 mmTren delantero 0.413 kg 277 mm mm 0 mm -213.85 mmTren trasero 1.44 kg 900 mm 0 mm –0.213864 mm
Motor + hélice 1.154 kg 1125 mm 0 mm 268.368 mmBaterías 3.801 kg 400 mm 0 mm -91.204 mmAviónica 0.564 kg 250 mm 0 mm -80.204 mmCentro de gravedad XCG YCG ZCG
UAV 777.55 mm 0 mm -0.006515 mm
Cuadro 4.10: Cálculo del centro de gravedad
4.7. Estudio de cargas aerodinámicas y estructurales.Se procede a realizar el cálculo le las cargas aerodinámicas y estructurales que sufrirá
la aeronave para comprobar si los refuerzos utilizados cumplen su cometido. Los estudiosrealizados han sido hechos tomándo los componentes estudiados como barras y aplicandoel cálculo establecido en la Teoría de Barras de la Resistencia de Materiales por lo que loscálculos están expuestos a error. Se considerará el estudio para estimar un orden de magnitudaproximado y comprobar que las medidas utilizadas para reforzar son correctas.
Esfuerzos en el encastre del ala. Debido a la gran envergadura del ala así como a lasustentación que proporciona, se tiene un elevador momento en el encastre. Se utiliza para elcálculo de los esfuerzos la Teoría de vigas de Resistencia de Materiales. Se trata el semialacomo una viga empotrada en uno de los extremos (zona de unión al fuselaje)., Figura 4.22.
Figura 4.22: Se muestra una barra empotrada en el extremo que representa el ala a la horade realizar el estudio de las cargas aerodinámicas.
Figura 4.23: Ecuaciones de la Resistencia de Materiales utilizadas para el cálculo de la fuerzay del momento que se produce en el encastre, considerando el ala como una viga empotradaen el extremo con una carga uniforme aplicada.
65

Suponiendo la carga alar como una carga distribuida uniformemente, es decir, la cargaalar por la cuerda media del ala (q=55.54 Pa) y aplicando las ecuaciones definidas en laFigura ??, se calcula el esfuerzo en el encastre y el momento resultante.
M = 12qL2 → Mtotal = 2M = 142,18Nm
Rtotal = 2qL = 177,728N
Siendo L el valor de la envergadura del semiala. Los valores con el subíndice total haránreferencia al ala completa, multiplicando los valores obtenidos del estudio del semiala pordos.
Una vez calculado el momento en el encastre, se procede a realizar el cálculo del esfuerzoque deberá soportar la cuaderna del borde de ataque del ala. El rigidizador del ala se modelacomo una barra circular que está sometida a una carga distribuida, por lo que la expresióndel esfuerzo será:
σ = Mtotal
I
D
2= 53,63KPa
siendo la inercia I = πD4
64 . La tensión máxima a compresión soportada por maderas de estetipo son mucho mayores (∼ MPa) , por lo que se puede aceptar que la estructura utilizadaes adecuada.
Esfuerzos en la cuaderna de borde de salida. En el análisis de la cuaderna de la parteposterior del fuselaje se tendrá en cuenta el esfuerzo que provoca la presencia del motor enconfiguración pusher, ya que el esfuerzo provocado por la presencia del ala en el encastre fuecalculado en el apartado anterior y está dentro del rango admitido.
El valor del esfuerzo al que está sometido vendrá dado por tanto por el empuje queproporcione la hélice. La zona de unión del motor a la cuaderna se modela como una barraempotrada en un extremo con una carga puntual aplicada en el otro y la expresión del esfuerzoa la que está sometida será:
σ = M
I
b
2= 1,976MPa
donde la inercia se calcula como I = eb3
12 , donde ”e” es el espesor de la barra y ”b” lalongitud de la barra, desde la zona del motor hasta la unión con la cuaderna. El momentose calculará con el valor del empuje máximo calculado en el capítulo de Propulsión de estetrabajo y la distancia ”b” antes mencionada. El valor del esfuerzo está muy por debajo denuevo del que es capaz de soportar el refuerzo, por lo que la estructura no sufrirá daños.
Esfuerzos en la unión tubo-cola. En cuanto al tubo de cola, se modelará como unabarra circular con espesor sometida a una carga distribuida. El momento de flexión aplicadoal tubo en la unión se calculará a partir de la sustentación que proporciona la cola. Una vezobtenido el valor de la sustentación se calculará el momento multiplicando por la distanciaentre la cola y el fuselaje.
La expresión del esfuerzo al que está sometido es la misma que en el caso anterior, siendoahora la inercia I = π
4 (D4ext − D4
int) y el momento de flexión el mencionado anteriormente.El resultado es σ = 2,57 KPa.
Nuevamente, la carga a la que está sometido el tubo es menor a la que es capaz deexperimentar un material como es la fibra de carbono (∼ GPa), por lo que se considera queel tubo de cola no experimentará daño alguno.
66

Capítulo 5
Estabilidad
5.1. IntroducciónEl concepto de estabilidad se define como la capacidad que tiene la aeronave de regresar
a la condición de equilibrio de forma autónoma. Es un aspecto crucial en el diseño de unaaeronave ya que será lo que permita volar de forma segura. La estabilidad tiene una grandependencia con la localización del centro de gravedad, de la posición del ala y de la posiciónde los estabilizadores, de manera que para conseguir que el avión sea estable se tuvo constanterealimentación con el apartado de estructuras, para la distribución adecuada de los pesos.
Por otra parte, el control de la aeronave se realiza mediante una serie de dispositivosde control (flaperones, timón de dirección y timón de profundidad), cuya deflexión permitegenerar fuerzas y momentos necesarios para controlar el avión
En este capítulo se realizará un estudio de la estabilidad estática del UAV, analizando elproblema de la estabilidad longitudinal y de la estabilidad lateral-direccional. Estos proble-mas se consideran desacoplados debido a que la aeronave tiene un plano de simetría y losdispositivos de control longitudinales no generan fuerzas laterales, así como los dispositivosde control laterales-direccionales no producen fuerzas longitudinales. Por tanto se supondrándos modelos independientes. Para cada modelo se estudiarán las fuerzas y momentos que leafectan y se obtendrá un modelo lineal a partir del cual se podrán calcular las condiciones deequilibrio mediante el cálculo de las derivadas de estabilidad y control.
Para comenzar, en la sección (1.2) se dimensionarán el timón de dirección y el timón deprofundidad mediante el documento de excel utilizador anteriormente ”Calculador de diseñode aviones”. Seguidamente se hará un estudio de la estabilidad longitudinal. En primer lugarse estudiará la estabilidad estática, de donde se extraerá el valor del margen estático, asícomo los coeficientes asociados a la estabilidad longitudinal. En segundo lugar se hará unestudio de los coeficientes de la estabilidad dinámica longitudinal. Por último, en la sección(1.4) se realizarán cálculos similares para la estabilidad lateral-direccional de la aeronave. Esimportante añadir que el estudio de la estabilidad dinámica que se hará será superficial. Parahacer un estudio más detallado, habría que calcular los modos de vibración de la aeronave.
5.2. Dimensionado de las superficies de controlPara realizar el dimensionado se utilizó el documento de excel ”Calculador de diseño de
aviones”. Este documento, como se explicó anteriormente en el capítulo de aerodinámica,permite calcular las dimensiones de los dispositivos de control en función de la superficie delala y de la cola. El cálculo de la dimensión de los alerones se elimina debido a la colocaciónde flaperones en lugar de flaps y alerones en las alas.
67

En cuanto al timón de profundidad y al timón de dirección, los resultados obtenidos trasintroducir la geometría del avión en el documento de excel son:
Timón de profundidad (elevator).
• le = 1m• ce = 0,0375m• Ae = 0,0375m2
Figura 5.1: Timón de profundidad.Se muestra el timón de profundidad ubicado en el estabilizador horizontal con sus
correspondientes medidas.
Timón de dirección (rudder).
• hr = 0,35m• cr = 0,105m• Ar = 0,0368m2
Figura 5.2: Timón de dirección.Se muestra el timón de dirección ubicado en el estabilizador vertical con sus
correspondientes medidas.
68

5.3. Configuración longitudinalEn esta sección se hará un análisis de la configuración longitudinal del avión. En el
estudio de la estabilidad longitudinal intervienen las fuerzas y momentos contenidas en elplano vertical de simetría.
5.3.1. Estabilidad estática longitudinal.
La estabilidad longitudinal estática viene definida por el signo de CMα < 0. Esto implicaque al producirse cualquier variación en el ángulo de ataque, el avión es capaz de generar unmomento (de cabeceo) para contrarrestar esta variación y volver a su posición de equilibrio.Este fenómeno se aprecia en las Figuras 5.3 y 5.4. Por otra parte, CM0 debe ser positivo paraque el ángulo de ataque de equilibrio sea positivo.
Figura 5.3: Estabilidad longitudinalSe observa como dependiendo de la posición del centro de gravedad varía la estabilidad de
la aeronave, debido al cambio de signo de CMα . [6]
69

(a) Equilibrio estable, CMα < 0 yCM0 > 0.
(b) Equilibrio inestable, CMα >0.
(c) Equilibrio neutro, CMα = 0.
Figura 5.4: Tipos de equilibrioEn la figura se muestran los casos de equilibrio estable, neutro e inestable. El caso estable
(a) es el que determinará la estabilidad estática longitudinal de la aeronave.
5.3.1.1. Punto neutro
Se denomina punto neutro a la posición del centro de gravedad que hace que el equilibriosea neutro, CMα = 0, de manera que determina la posición más retrasada que puede tener elcentro de gravedad para que la aeronave sea estable. El cálculo del punto neutro se determinamediante la siguiente ecuación:
XNP =CLαwb
Xacwb+ ηt
StS CLαt
(1 − ∂ϵt
∂α
)Xact
CLαwb+ ηt
StS CLαt
(1 − ∂ϵt
∂α
)Donde ηt es el cociente de presiones dinámicas, qt
q =0.95.
Los valores de las pendientes de sustentación son los obtenidos mediante el estudio delala y del estabilizador horizontal en XFLR5, explicados en la sección de aerodinámica. Estosson CLαwb
= 4,879 rad−1 y CLαt= 3,714 rad−1.
También es necesario hacer una estimación del downwash ([4]),
∂ϵt∂α
= 4,44[KAKλKH(cosΛc/4)1/2]1,19
siendo:
KA = 1A
− 11 +A1,7
Kλ = 10 − 3λ7
KH =1 − hH
b(2lhb
)1/3
donde:
A=7.93, alargamiento del ala.
λ=E=0.5652, estrechamiento del ala.
Λc/4=5.36ž, flecha en la línea c/4 del ala.
70

hH=0.2 m, altura entre la deriva horizontal y el plano del ala.
lh=1.078 m,distancia paralela a la cuerda del ala entre los centro aerodinámicos del alay la cola.
b=3.2 m, envergadura del ala.
Además, ϵ0t =2CL0wb
πA
5.3.1.2. Centro de gravedad
El centro de gravedad se calcula como la suma ponderada de cada uno de los pesos delos componentes del UAV dividido entre el peso total, tal y como se mostró en el capítulode estructuras. El resultado obtenido fue XCG = 0,77755m, YCG = 0m y ZCG = −0,0075,tomando como origen el morro del UAV.
5.3.1.3. Margen estático
El margen estático es una medida entre la posición del centro de gravedad y el puntoneutro de la aeronave. Es conveniente lograr un margen estático en torno al 15 %, de maneraque se logre un vuelo seguro. El cálculo de margen estático del ala se define como:
SM = XNP −XCG
M.A.C.
5.3.1.4. Resultados
La gráfica obtenida al implementar este programa son las mostradas en la figura ??.
Figura 5.5: Ubicación del centro de gravedad y del punto neutro según la posición del centrode gravedad del ala.
Como se observa en la Figura 5.5, la posición del ala influye en la del centro de gravedad ypor lo tanto en la posición del punto neutro y del margen estático. Seleccionar una posición delala adecuada determinará la estabilidad longitudinal del UAV. Es necesario tener en cuenta
71

que la posición del ala está limitada por la longitud del fuselaje, así como por la posición delmotor, al estar en configuración pusher.
Se tomó la decisión de colocar el centro de gravedad del ala a 0.7565 m del morro delavión (Figura 5.6), con lo que se consiguió un margen estático de 18.27 %. Para Conseguir estadistribución fue necesario ir modificando la distribución del peso del UAV hasta conseguir losresultados obtenidos.
Figura 5.6: Posición del alaLa posición del ala a (x=0.7565 m) y valores correspondientes del centro de gravedad del
UAV y punto neutro para dicha posición .
Por tanto, se obtienen los siguientes resultados:
XNP = 0,8532
SM = 18,27 %
Figura 5.7: Configuración longitudinal.
72

5.3.1.5. Trimado longitudinal
El trimado longitudinal consiste en fijar el ángulo de ataque, la deflexión del timón deprofundidad y las incidencias del ala y de la cola respecto al fuselaje de manera que seconsiga un vuelo equilibrado. Para realizar el trimado longitudinal y hacer el análisis delvuelo equilibrado es necesaria la estimación de las derivadas de estabilidad longitudinales:CLα , CLδe
, CMα , CMδey de los coeficientes CL0 y CM0 . Al estar propulsado mediante motor
eléctrico, el peso del avión no variará durante el vuelo, por lo que el centro de gravedad novariará su posición. Para realizar el trimado del avión se impone como condición que el ángulode ataque del fuselaje durante el vuelo sea cero, de manera que la aeronave estará sustentadaexclusivamente por la incidencia del ala.
Las ecuaciones de vuelo equilibrado son las siguientes:
L = W → CL = CL0 + CLαα+ CLδeδe = W
qS
M = 0 → CM = CM0 + CMαα+ CMδeδe = 0
siendo en los cálculos "q"la correspondiente al vuelo en crucero (V=18.5 m/s, calculadoen el capítulo de Propulsión), a una altitud de 500 m y la carga alar (W/S) = 134,1481Pa.Se define δe como el ángulo de deflexión del timón de profundidad.
Se procede ahora a realizar el cálculo de la derivadas de estabilidad y control correspon-dientes al caso longitudinal, que representan el cambio de las fuerzas y momentos aerodiná-micos ante cambios en las variables de estado y de control.
Coeficientes correspondientes a CL.
CL0 = CL0wb+ CLαwb
iw + ηtSt
SCL0t
+ ηtSt
SCLαt
(it − ϵ0t)
CLα = CLαwb+ ηt
St
SCLαt
(1 − ∂ϵt∂α
)
CLδe= ηt
St
SCLαt
τδe
Coeficientes correspondientes a CM .
CM0 = CMACw+ (X̄CG − X̄ACw)(CL0w
+ CLαiw) + ηt
St
S
ch
M.A.C.CMACt
CMα = −CLαSM
CMδe= − lt
cCLδe
Donde los coeficientes correspondientes al ala y a la cola son los calculados en el capítulode aerodinámica mediante XFLR5: CL0wb
= 0,1977 y CL0t= 0.
El coeficiente de momento con respecto al centro aerodinámico del ala se define comoCMACw
= CMxw+ CL0wb
M.A.C./4−xM.A.C. , siendo x el punto en el que se mide el momento. Se
traslada el momento desde el punto en el cual se estaba calculando en XFLR5 cuando seestudió el ala al centro aerodinámico de la misma (borde de ataque). Por otra parte, elcentro de momento respecto al centro aerodinámico de la cola es CMACt
= 0, por ser el perfilsimétrico.
73

Para el cálculo de la incidencia del ala se fija el valor de it = −2◦ y se impone la condiciónα = 0◦, para que el resultado obtenido sea en condición de vuelo óptimo. Las ecuacionesanteriores quedan reducidas por tanto a:
CL0 + CLδeδe = W
qS
CM0 + CMδe= 0
Despejando δe en ambas ecuaciones e igualándolas se llega a:
CL0CMδe− CM0CLδe
= CMδe
W
qS
Todas estas ecuaciones se implementaron en MATLAB, obteniéndose un valor de inciden-cia del ala iw = 0,8372◦. Una vez calculado este valor se procedió a realizar los cálculos delas derivas de estabilidad, obteniéndose:
Derivadas de estabilidad Valores de la teoríaCL0 0.19769 -CLα 5.2113 rad−1 >0CLδe
0.20514 rad−1 >0CM0 0.0436 rad−1 >0CMα -1.736 rad−1 <0CMδe
-0.93883 rad−1 <0
Cuadro 5.1: Derivadas de estabilidad estática longitudinales.La columna de la derecha muestra los signos que debe tomar cada una de las derivadas paraque se cumple el equilibrio en la estabilidad longitudinal. Como puede observarse, todos loscoeficientes cumplen este requisito por lo que se considera vuelo equilibrado.
Una vez hecho esto, se resolvió el sistema de dos ecuaciones con dos incógnitas definidoanteriomente para calcular el valor que debía tomar el ángulo de ataque y la deflexión nece-saria del timón del elevador para que el UAV esté trimado. Los resultados obtenidos para lavelocidad de crucero (V=18.5 m/s) son:
α = −1,7034◦
δe = 5,8107◦
Cabe añadir que el trimado para cada condición de vuelo tiene un valor distinto de αy δe, por lo que hizo un estudio para determinar los valores de estos ángulos para distintasvelocidades de vuelo (Figura 5.8). Se estudia la variación de estos ángulos en una rango develocidades entre 10 m/s y 40 m/s.
74

(a) Ángulo de ataque en función de la velocidad devuelo.
(b) Ángulo de dlefexión del timón de profundidad enfunción de la velocidad de vuelo.
Figura 5.8: Variación del ángulo de ataque y el ángulo de deflexión del timón de profundidadpara trimar el UAV en función de la velocidad de vuelo.
Como puede comprobarse, a menores velocidades se necesitará mayor ángulo de ataquepara sustentar el avión, que irá disminuyendo con la velocidad. Por otra parte, la deflexióndel timón de profundidad a altas velocidades tiene que ser mayor para poder equilibrar elavión.
5.3.2. Estabilidad dinámica longitudinal.
En esta sección se realiza un breve introducción a la estabilidad dinámica, donde secalculan los coeficientes correspondientes a la estabilidad dinámica longitudinal para poderterminar de determinar la estabilidad de la aeronave. El cálculo de los modos de estabilidadno entra dentro del estudio realizado en este proyecto, y se recomienda su análisis en caso deestudios posteriores.
Para comenzar se realiza el cálculo de CDα , con expresión:
CDα ≈ 2KCL1CLα
siendo K = 1πARe .
El resto de derivadas son las siguientes:
Derivadas respecto a la velocidad de vuelo. Se desprecian todas las derivadas (CDu =CMu ≈ 0) excepto la respectiva al coeficiente de sustentación, debido a que su valor esimportante para los efectos de compresibilidad y es conveniente conocerlo, a pesar de que elUAV vuele a bajos números de Mach.
CLu = CL1M2
1 −M2
Dereivadas respecto a la tasa de variación del ángulo de ataque. Se considera elcoeficiente asociado a la resistencia despreciable CDα̇ ≈ 0. Por otra parte, el coeficiente desustentación se expresa en función de las características de la cola, como se indica en lasiguiente expresión:
CLα̇ = 2CLαtηXNAt −XCG
MAC
St
S
dϵ
dα
75

El coeficiente de momento se calcula utilizando la ecuación:
CMα̇ = −CLα̇
XNA,t −XCG
MAC
Derivadas respecto a la velocidad angular de cabeceo. Se aproximan por cero lasderivadas correspondientes a la resistencia y al momento, CDq ≈ 0 y CMq ≈ 0 . El coeficientede sustentación se calcula como:
CLq =AR+ 2cosΛc/4ARB + 2cosΛc/4
(CLq )M=0
siendo,
(CLq )M=0 = CLα
(12
+ 2(XNA,w −XCG)c̄
)B =
√1 −M2cos2Λc/4
Derivadas propulsivas. En cuanto a las derivadas propulsivas, las expresiones para elcálculo de las mismas son:
CTx1= CD1 CTxu
= −3CTx1CMT1
= −CM1
CMTu= −dT
c CMTα≈ 0 CTxα
≈ 0
Derivadas de estabilidadCDα 0.0926 rad−1
Coeficientes asociados a la velocidad de vueloCLu 0.0017 rad−1
CMu ≈ 0 rad−1
CDu ≈ 0 rad−1
Coeficientes asociados al ángulo de ataqueCLα̇ 2.4605 rad−1
CMα̇ -11.2820 rad−1
CDα̇ ≈ 0 rad−1
Coeficientes asociados a la velocidad angular de cabeceoCLq 1.9558 rad−1
CMq -30.6897 rad−1
CDq ≈ 0 rad−1
Derivadas propulsivasCTx1
0.0232 rad−1
CTxu-0.0697 rad−1
CMT10 rad−1
CMTu0.0452 rad−1
CMTα≈ 0 rad−1
CTxα≈ 0 rad−1
Cuadro 5.2: Derivadas de estabilidad dinámica longitudinales.
Los resultados obtenidos tras realizar los cálculos de las derivadas en MATLAB fueronlos recogidos en la Tabla ??.
76

5.4. Configuración lateral-direccionalEl estudio de la estabilidad lateral-direccional consiste en la capacidad que tiene el avión
en recuperar su posición de equilibrio cuando se realizan maniobras fuera del plano de simetríadel avión. Al estar el centro de gravedad situado en este plano de simetría, se considera quesu posición no afecta a la estabilidad lateral-direccional del UAV.
5.4.1. Estabilidad estática lateral-direccional.
En esta sección se procederá a realizar el cálculo de las derivadas de estabilidad laterales-direccionales estáticas y para ello se ha supuesto la teoría linealizada para las ecuaciones delas fuerzas y momentos asociados, con lo que las ecuaciones se pueden escribir como:
Cy = Cy0 + Cyββ + Cyδa
δa + Cyδrδr (5.1)
Cl = Cl0 + Clββ + Clδaδa + Clδr
δr (5.2)
Cn = Cn0 + Cnββ + Cnδa
δa + Cnδrδr (5.3)
Siendo β el ángulo de resbalamiento, δa la deflexión de los flaperones y δr la deflexión deltimón de dirección. En caso de vuelo simétrico puede afirmarse que Cy0 = Cl0 = Cn0 = 0.
Para el cálculo de las derivadas de estabilidad se definirán primero sus expresiones según lateoría ([4], [5], [6]) y se particularizarán los valores para el caso del UAV. Una vez introducidastodas estas ecuaciones, se pasará a realizar su cálculo en MATLAB, y se mostrarán los valoresobtenidos (Tabla 5.4).
Coeficientes asociados a la fuerza lateral. Estos coeficientes son Cyβ, Cyδa
y Cyδa. El
primero hace referencia a la fuerza lateral. Está compuesto por la contribución del ala y delestabilizador vertical el vertical, por lo que puede escribirse como:
Cyβ= (Cyβ
)w + (Cyβ)v
Al ser la flecha del borde de salida del ala nula, se podría afirmar que (Cyβ)w = 0. Por
otra parte, la contribución del estabilizador vertical se define como:
(Cyβ)v = −ηv
Sv
SCLαv
(1 + dσ
dβ
)donde el parámetro ∂σ
∂β (sidewash) viene dado mediante la expresión:
∂σ
∂β=
0,724 + 3,06Sv/S1+cos(Λc/4,v) + 0,4zw
df,max+ 0,009Av
ηv− 1
siendo zw = 0,15m es la distancia entre la línea media del fuselaje y el centro de gravedaddel ala en el eje z y df,max = 0,3m es el diámetro máximo del fuselaje.
En segundo lugar se tiene la fuerza lateral asociada a los alerones. Esta derivada es elcambio en el coeficiente con la deflexión del alerón y se suele aproximar a cero, Cyδa
≈ 0.Por otra parte, también influye en la fuerza lateral el timón de dirección. Este derivada
de estabilidad es el cambio en el coeficiente con la deflexión asociada al timón de dirección yse escribe como:
Cyδr= −τ Sv
SCLαv
77

Donde τ se calcula mediante la siguiente gráfica, cuyo valor se utilizará de nuevo para elresto de derivadas asociadas a la deflexión del timón de dirección.
Figura 5.9: Gráfica para el cálculo de τ .La relación de áreas entre el rudder y el estabilizador vertical es SR/Sv = 0,368, por lo que
τ ≈ 0,56. [2]
Coeficientes asociados al momento de balance. Estos coeficientes son Clβ , Clδay Clδr
.El primero hace referencia al efecto diedro. Este coeficiente contabiliza la influencia de delala con y sin diedro, del estabilizador vertical y la posición ala-fuselaje y ala-vertical. Sedesglosarán componente a componente, indicando en que medida contribuye cada uno deellos.
Clβ = Clβw+ Clβv
+ (∆Clβ )1 + (∆Clβ )2 + (Clβ )w,Γ=0
La contribución del ala sin tener cuenta el diedro se calcula a partir de la siguienteexpresión, obteniéndose los valores de Clβ/Γ y ∆Clβ de la Figura 5.10.
Clβw=Clβ
ΓΓ + (∆Clβ )tip
(a) Conociendo el alargamiento del ala, AR = 7,93,y el estrechemiento, λ = 0,565, se obtiene el valor deClβ /Γ = −0,00024.
(b) Indica como afecta el acabado de la pun-ta de ala a la estabilidad. Se selecciona el pri-mero de ellos, por aumentar la estabilidad,ya que el efecto diedro ha de ser negativopara que la aeronave sea estable.
Figura 5.10: Gráficas para el cálculo del efecto diedro. [2]
Por otra parte, el componente del estabilizador vertical será:
Clβv= −ηv
Sv
SCLαv
(1 + ∂σ
∂β
)hv
b
78

Los coeficientes (∆Clβ )1 y (∆Clβ )2 se definen según la tabla de la Figura 5.11, donde se vecomo afectan a la estabilidad la posición del ala respecto al fuselaje y respecto al estabilizadorvertical. Al diseñar el UAV, se utilizó ala alta para aumentar la estabilidad del mismo. Semuestra ahora en la figura de que manera influye la colocación.
Figura 5.11: Tabla en la que se muestra como afecta a la estabilidad la posición del ala.Se escoge ala alta y se utilizan los valores de (∆Clβ )1 = −0,0006 y (∆Clβ )2 = 0,00016 para
el cálculo del efecto diedro.[2]
Por último, la contribución del ala suponiendo que no tiene diedro (Γ = 0), cuya definiciónes:
(Clβ )w,Γ=0 = CLw
(− 16
3π2AR+ 0,05
)El efecto diedro ha de ser negativo para que se cumpla la condición de estabilidad de la
aeronave, lo que implica que la aeronave es capaz de producir un momento de balance paracontrarrestar el resbalamiento.
La siguiente derivada asociada al momento de balance es la potencia de control lateral,Clδa
. Su cálculo se reduce a la siguiente expresión:
Clδa= Clδ
CLαw
Clαw
K1K2
Siendo Clδ = Clδ(Clδ
)theory(Clδ )theory. Los valores de Clδ , K1 y K2 se obtienen de las gráficas
de las Figuras 5.12 y 5.13.
(a) Mediante esta primera gráfica se realizael cálculo de Clδ . Se sabe que t/c=0.12 yca/cw=0.15, por lo que se obtiene Clδ = 3,15.
(b) En esta segunda gráfica se realiza el cálculode Clδ
(Clδ)theory
. Sabiendo que CLαw/Clαw
=0.8288 y
ca/cw=0.15 se obtiene Clδ(Clδ
)theory= 0,675.
Figura 5.12: Gráficas para el cálculo de Clδ y Clδ(Clδ
)theory.
79

(a) Para el cálculo de K1 se procede obteniendo dela gráfica de arriba a la derecha el valor de αg. Larelación entre la cuerda del alerón y la del ala esca/cw=0.15, por lo que αg = −0,22. Se introduceeste valor el la gráfica de la izquierda de la Figuray, sabiendo que el alargamiento del ala es A =AR = 7,93, se obtiene K1 = 1,16.
(b) El valor de K2 se obtiene de esta gráfica. Se sabeque λ = 0,565 y que η = 0,78, por lo que de la gráficase obtiene K2 = 0,095.
Figura 5.13: Cálculo de los coeficientes K1 y K2.Estos serán necesarios para obtener el valor de la potencia de control lateral, Clδa
.
La última derivada de estabilidad asociada al balance es la derivada cruzada, Clδr. Es el
cambio en el coeficiente de balance con la deflexión del timón de dirección.
Clδr= −τ Sr
SCLαv
zv
b
Coeficientes asociados al momento de guiñada. Los coeficientes asociados al momen-to de guiñada son Cnβ
, Cnδay Cnδr
. El primero, Cnβ, es el índice de estabilidad estática
direccional. Tiene que ser positivo para poder generar el momento de guiñada necesario paraequilibrar la aeronave en caso de que se produzca resbalamiento. Para su cálculo se despreciala contribución del fuselaje y se contabilizan la del ala y la del estabilizador vertical.
Cnβ= (Cnβ
)w + (Cnβ)v
La contribución del ala puede escribirse como:
(Cnβ)w = (Cnβ
)Γ,w + (Cnβ)Λ,w
Donde la influencia debida al diedro, despreciando los efectos de la resistencia inducidase puede expresar como:
(Cnβ)Γ,w = −0,075ΓCLw
También hay que tener en cuenta:
(Cnβ)Λ,w = C2
Lw
( 14πAR
−tanΛc/4
πAR(AR+ 4cosΛc/4)(cosΛc/4−AR
2− AR2
8cosΛc/4
))+6C2
Lwxaw
sinΛc/4A1
80

Y la contribución del estabilizador vertical puede escribirse como:
(Cnβ)v = −(Cyβ
)vlvb
La guiñada adversa o derivada cruzada es el cambio del coeficiente de momento de guiñadacon la deflexión del alerón. Se expresa como:
Cnδa= 2KCL0w
Clδa
Donde la constante K viene determinada de la Figura 5.14.
Figura 5.14: Gráfica para el cálculo de la constante K.Esta constante es necesaria para determinar el valor del coeficiente de guiñada adversa,
Cnδa. Para ello se introduce el valor de η calculado anteriormente, η = 0,78 y el
alargamiento del ala AR = 7,93 y se obtiene K = −0,165.
Por último, la potencia decontrol direccional se define como el cambio en el coeficiente demomento de guiñada con la deflexión del timón de dirección. Su expresión se escribe como:
Cnδr= τ
Sv
S
lvbCLαv
Donde ηv ≈ 0,95 es el cociente entre presiones dinámicas del ala y el estabilizador vertical,τ = 0,56 es la deflexión del timón de dirección, cuyo valor se obtuvo de la Figura 5.9. El valorde la pendiente de sustentación del estabilizador vertical se obtiene mediante el análisis delmismo en XFLR5 y su valor es CLαv
= 3,7414rad−1
En la Tabla 5.4 se recogen los resultados de los cálculos al implementar todas las ecua-ciones anteriores en MATLAB. La columna de la derecha refleja los valores usuales de estoscoeficientes según la referencia de la bibliografía [7]. Se puede observar que todos los valoresson razonables y del orden de magnitud de las referencias. El único valor que discrepa delde referencia es Cnβ
. Esta diferencia se puede deber a las suposiciones que se han tomado alrealizar todos los cálculos, ya que son meramente teóricos.
81

Coeficientes asociados a la fuerza lateralDerivadas de estabilidad Valores de la teoríaCyβ -0.45186 rad−1 ≈ −0,31 rad−1
Cyδa0 ≈ 0
Cyδr0.16242 rad−1 0.12-0.24 rad−1
Coeficientes asociados al momento de balanceDerivadas de estabilidad Valores de la teoríaClβ -0.033352 rad−1 −0,03 − −0,12 rad−1
Clδa0.1942 rad−1 0,1 − 0,25 rad−1
Clδr0.0014009 rad−1 −
Coeficientes asociados al momento de guiñadaDerivadas de estabilidad Valores de la teoríaCnβ 0.16559 rad−1 0.03-0.12 rad−1
Cnδa-0.010504 rad−1 -0.004 - -0.09 rad−1
Cnδr-0.056463 rad−1 ≈ 0,06 rad−1
Cuadro 5.3: Derivadas de estabilidad estática laterales-direccionales.
En este caso se cumple que CLβ< 0 y Cnβ
> 0 condiciones de estabilidad de la aeronave.
5.4.2. Estabilidad dinámica lateral-direccional.
En este apartado se calculan los coeficientes de la estabilidad dinámica para la configu-ración lateral direccional.
Derivadas propulsivas. Se consideran CTnβ≈ 0 y CTYβ
≈ 0 debido a que el motor seencuentra en el eje longitudinal del fuselaje.
Derivadas respecto a la tasa de variación del ángulo de ataque. Los valores de estasderivadas son muy pequeños y su cálculo se realiza mediante las ecuaciones que se mostrarána continuación. Para obtener su valor se particularizan para α=0 y σβ=σβW B
, obtenido de lagráfica de la Figura 5.15.
CYβ̇= 2CLαv
σβSv
S
lvb
Figura 5.15: Cálculo para CYβ̇.
Cálculo para σβ. Siendo 2hv/b = 0,125 (según la nomenclatura utilizada) entoncesσβ ≈ 0,14.
El resto de coeficientes se calcularán como:
Clβ̇= CYβ̇
hv
b
82

Cnβ̇= −CYβ̇
lvb
Derivadas respecto a la velocidad angular de balance Las expresiones que definenestos coeficientes son:
CYp = CYpw+ CYpv
Simplificando la ecuación de la teoria (flecha nula) se obtiene el componente,
CYpw= CLw
1AR
CYpv= CLαv
ηSv
S
(− 2hv
b1+ ( ∂σ
∂( pb2U )
)av
)Donde ( ∂σ
∂( pb2U
))av se obtiene de la Figura 5.16
Figura 5.16: Gráfica para el cálculo de CYp
Cálculo de ( ∂σ
∂( pb2U
))av . Se tiene que bt/b/2 = 0,21875, por tanto ( ∂σ
∂( pb2U
))av ≈ 0,25
Por otra parte,
Clp = Clpw+ Clpv
Clpw= Clp,a0w
− 18πAR
C2Lw
− 18CD1
83

Clpv= 2CYβv
(hv
b
)De donde Clp,a0w
se calcula mediante la gráfica 5.17.
Figura 5.17: Gráfica para el cálculo de Clp
Se utiliza para calcular Clp,a0w, con un valor aproximadamente de 0.42
En cuanto a CLp , debe ser negativo para contribuir con la estabilidad de la aeronave,proporcionando amortiguamiento en balance.
Para finalizar, las ecuaciones para el cálculo de Cnp son:
Cnp = Cnpw+ Cnpv
Cnpw= CLw
AR+ 4AR+ 4
(Cnp
CL
)ΛLE=0
Cnpv= 2CLαv
hv
bηvSv
S
De donde(Cnp
CL
)ΛLE=0 se calcula con el uso de la Figura 5.18.
Figura 5.18: Gráfica para el cálculo de Cálculo de Cnp(Cnp
CL
)ΛLE=0, aproximadamente 0.625
84

Derividas de estabilidad con respecto a la velocidad angular de guiñada El cálculode CYr viene dado por la expresión:
CYr = CYrw+ CYrv
CYrw= 0,143CLw − 0,05
CYrv= −2 lv
bCYβv
Y el de Clr se calcula mediante:
Clr = Clrw+ Clrw
Clrw= CLw/4
Clrv= −2 lv
b
hv
bCYβv
Para finalizar, se realiza el cálculo de Cnr . Es importante tener en cuenta que este coefi-ciente representa el amortiguamiento en guiñada y para que se cumpla la estabilidad lateral-direccional tienes que ser menor que cero.
Cnr = Cnrw+ Cnrv
Cnrw= −0,33
(1 + 3λ2 + 2λ
)CD0w
− 0,02(1 − AR− 6
13− 1 − λ
2,5)C2
Lw
Cnrv= 2
(zv
b
)2CYβv
Coeficientes asociados a la fuerza propulsivaCTnβ
≈ 0CTYβ
≈ 0Coeficientes asociados a la tasa de variación del ángulo de ataqueCYβ̇
0.034 rad−1
Clβ̇0.00096 rad−1
Cnβ̇-0.0124 rad−1
Coeficientes asociados a la velocidad angular de balanceCYp 0.095 rad−1
Clp -0.423 rad−1
Cnp 0.1463 rad−1
Coeficientes asociados a la velocidad angular de guiñadaCYr 0.3137 rad−1
Clr 0.0611 rad−1
Cnr -0.1246 rad−1
Cuadro 5.4: Derivadas de estabilidad dinámica laterales-direccionales.
85

5.5. Problema de viraje niveladoDeterminadas las derivadas de estabilidad, se pasa a resolver el problema de viento cru-
zado. Para ello se realiza el equilibrado lateral direccional resolviendo el siguiente sistema deecuaciones: Cyβ
CyδaCyδr
Clβ ClδaClδr
CnβCnδa
Cnδr
βδa
δr
=
−∆FY
−∆L−∆N
(5.4)
Siendo ∆FY , ∆L y ∆N las fuerzas asimétricas generadas.
Se realizó el estudio para un viraje nivelado, a una altitud de 500 m a una velocidad de 32m/s y un factor de carga n = 1,2 (ϕ = arccos( 1
n) = 33,56, obteniéndose R = U2
gtanϕ = 157,35my ·ψ1 = gtanϕ1
U1= 0,2.
Las inercias del UAV fueron extraidas del modelo diseñado en CATIA, y sus valores:
Iyy = 1,494kg ·m2
Izz = 1,377kg ·m2
Ixz = −0,07kg ·m2
Las fuerzas asimétricas se escriben como:
∆FY = −Cyr
bgsinϕ
2U21
∆L = (Izz − Iyy)g2sin3(ϕ)q̄1SbU2
1 cosϕ− Clr
bgsinϕ
2U21
∆N = Ixzg2sin3ϕ
q̄1SbU21 cosϕ
− Cnr
bgsinϕ
2U21
Donde Cyr = 0,3117, Clr = 0,0868 y Cnr = − − 333e− 4 son los obtenidos en el apartadoanterior, en el que se calculan las derivadas correspondientes a la estabilidad dinámica.
En este análisis se supone que no existen asimetrías propulsivas, así como que la línea deempuje pasa por el centro de gravedad. Resolviendo las ecuaciones se obtienen los siguientesvalores:
β = 0,0915◦
δa = −3,12◦
δr = −0,4365◦
Los valores de deflexión de los dispositivos de control son muy pequeños, lo que se puedetraducir en la efectividad que se tiene a la hora de realizar virajes.
86

Capítulo 6
Propulsión
6.1. IntroducciónEn este capítulo se desarrollan los contenidos referentes a la propulsión de la aeronave. Se
exprondrán los distintos tipos de sistema propulsor que pueden ser utilizados y las distintasconfiguraciones que pueden tomar, seleccionando en cada caso cual es la más adecuada parael UAV en cuestión. Además se describirá el funcionamiento del motor escogido y el modo enque se escogen la hélice y batería adecuadas.
A la hora de realizar la selección del sistema motor de la aeronave se ha utilizado elprograma Motocalc. Mediante su uso es posible escoger un motor según las característicasde la aeronave y una vez hecho esto, permite hacer un estudio de las diferentes posibilidadessegún la batería y hélice escogidas.
De estos estudios se obtendrán resultados como son la velocidad óptima de vuelo, laposición de palanca, el empuje proporcionado, etc. que serán de utilidad en el resto de áreasde diseño del UAV.
En la sección (6.2), se hará una introducción acerca de los tipos de motor, hélice y bateríaescogidos y de su funcionamiento y se explicará el motivo por el que se escoge ese tipo encuestión. A continuación, en la sección (6.3) se detallará que motor se escoge, el tamaño dela hélice y la batería seleccionada con sus características correspondientes. Para finalizar, enla sección (6.4) se expondrán los resultados obtenidos mediante Motocalc, como son empuje,potencia del motor, etc.
6.2. Descripción de componentes.En este trabajo se hará un estudio acerca del tipo de motor, hélice y batería que serán
empleados. Para ello se hará antes una descripción de los componentes del sistema motor dela aeronave.
6.2.1. Motor
La selección del motor es un proceso clave para el diseño del UAV ya que el tipo depropulsión, su ubicación, su tamaño, etc. afectarán a todas las áreas de diseño del modelo. Sedecide utilizar propulsión eléctrica debido a que los motores de combustión interna presentanciertas desventajas para este tipo de aviones, debido a su mayor peso y a la necesidad deempleo de combustible. Sin embargo, los motores eléctricos son ligeros, baratos y limpios,además de existir una amplia gama de tamaños, pesos, potencias y precios, siendo capacesde ajustarse a los requisitos de la aeronave.
87

Para la selección tanto del tipo de motor como de su ubicación se hicieron investigacionessobre como influiría cada decisión en la configuración de la aeronave y así poder optar por lasolución óptima.
6.2.1.1. Funcionamiento
Para comenzar, se hará una breve introducción sobre como funciona un motor eléctrico ylos distintos tipos que existen, para poder seleccionar el que mejor se ajuste a los requisitosiniciales.
Un motor eléctrico transforma energía eléctrica en mecánica mediante la rotación de uncampomagnético alrededor de una espira o bobinado. Al pasar la corriente eléctrica por labobina esta pasa a comportarse como un imán y sus polos se atraen y rechazan con el imánque se encuentra en la parte inferior. Al producirse este efecto, el paso de la corriente seve interrumpido y la bobina deja de comportarse como un imán aunque por inercia siguemoviendose hasta que da otra media vuelta y la corriente vuelve a pasar, repitiéndose el cicloanterior y haciendo que la bobina rote constantemente.
Dentro de los motores eléctricos se pueden distinguir motores con escobillas y los motoresbrushless, es decir, sin escobillas. El término sin escobillas quiere decir que no emplea loselementos que lo unen al colector para realizar el cambio de polaridad. Su funcionamientoconsiste en que el inversor ha de convertir la corriente alterna que recibe en continua ynuevamente a alterna de otra frecuencia.
La ventaja de los motores brushless es que al carecer de escobillas presentan una mayoreficiencia debido a una menor pérdida de calor y requieren un menor mantenimiento. Tam-bién es mayor su rendimiento, debido a que las baterías duran más para la misma potencia,pudiéndose así conseguir un menor peso para la misma potencia. También tienen un rangomayor de velocidades al no tener limitaciones mecánicas y menor ruido electrónico al no tenerinterferencia con otros circuitos. Como desventaja, necesitan de un control más complejo y ca-ro que los motores convencionales. Aun así estas complejidades están paliándose actualmentecon los controles electrónicos.
Se decide por tanto que el motor será de tipo brushless, ya que en resumen son más baratosde fabricar, pesan menos y requieren menos mantenimiento que los motores con escobillas.
Por otra parte, existen dos clases de motores brushless según la forma en que estén cons-truidos. Estos son:
Motores outrunner.Los bobinados de cobre se disponen en la parte interior en el centro del motor mientrasque los imanes se encuentran en una campana exterior que rodea el bobinado de cobrey a la que se conecta el eje, por lo que al girar la campana hace girar al eje.Esta clase de motores producen un menor número de revoluciones pero poseen un mayorpar al actuar la campana como volante de inercia, por lo que dan más potencia sin lanecesidad de emplear una reductora, lo que hace que sean más ligeros, silenciosos yeconómicos.
Motores inrunner. Producen un mayor número de revoluciones que los motores outrunnery a su vez tienen menos par motor. En este caso el bobinado es exterior y rodea a losimanes, que se encuentran en torno al eje. Al proporcionar un alto número de revo-luciones su kv es muy alto. Por otra parte, producen un par muy bajo y si se tieneque utilizar una hélice grande es necesario emplear una reductora. Aunque el empleode la reductora se podría tomar como un inconveniente, ya que puede ser fuente deaverías y requiere de un mantenimiento, si lo que se desea es potencia y efectividad en
88

un motor inrunner la reductora es una buena solución. Por tanto son realmente buenospara emplear hélices pequeñas funcionando a un gran número de revoluciones.
Figura 6.1: Motor brushless de tipo outrunner (izquierda) e inrunner (derecha).
6.2.1.2. Colocación
La colocación del motor es un factor clave a la hora de determinar el diseño del primerprototipo de la aeronave. Las configuraciones a estudiar fueron motor pusher y motor puller,cuyas características son las siguientes:
Pusher. El motor se encuentra situado por detrás del centro de gravedad del avión,detras del fuselaje y el ala.
Figura 6.2: UAV con motor en configuraciñon pusher.
• Ventajas.◦ Al estar la hélice situada en esa posición acelera el fluido que llega a la cola,
por lo que se consigue un mayor control tanto en cabeceo como en direccióna bajas velocidades.
◦ Al estar la hélice elevada se reduce la posibilidad de impactos.◦ La estela producida por la presencia de la hélice no afecta al fuselaje ni al ala,
por tanto no genera resistencia adicional y supone una mejora de la eficienciaaerodinámica.
• Desventajas◦ El colocar la hélice en esa posición también tiene implicaciones negativas. Al
estar la cola afectada directamente por la estela, las perturbaciones pueden
89

afectar al control de la aeronave. Por lo tanto, pequeñas perturbaciones po-drían ser motivo de fallos en el control de guiñada y cabeceo, pudiendo sertambién causa de vibraciones no deseadas.
◦ No se podrá utilizar el fluido impulsado por la hélice para refrigerar el fuselajeaunque esta desventaja no es crucial, debido a que la ausencia de la hélice enel morro disminuye la necesidad de refrigeración.
◦ Se produce una reducción de eficiencia de la hélice debido a que la corrienteen perturbada por la presencia del fuselaje antes de llegar a la hélice.
◦ Al situar el motor tras el fuselaje se produce un retraso del centro de grave-dad lo cual implica una reducción del margen estático, lo que afectará a laestabilidad.
Puller. Motor situado en el morro del la aeronave.
Figura 6.3: UAV con motor en configuraciñon puller.
• Ventajas◦ Al colocar el motor en la zona del morro del UAV se añade peso, lo que se
ve traducido a un adelanto del centro de gravedad, lo que implica una mejoraen la estabilidad de la aeronave. Sirve para estabilizar en cabeceo en caso deperturbaciones en el ángulo de ataque.
◦ Al no haber sido perturbado el flujo que incide en la hélice la eficiencia de lamisma es mayor. Por otra parte el flujo impulsado por la hélice puede utilizarsepara la refrigeración del fuselaje.
• Desventajas◦ La estela incide sobre el fuselaje y el ala, lo cual supone un gran aumento de
resistencia y una pérdida de eficiencia aerodinámica.◦ La hélice está expuesta a posibles daños en aterrizajes forzosos.
6.2.2. ESC (Electronic Speed Controller).
El ESC es el variador del motor. Son elementos que se encargan de manejar los motoreseléctricos. Los motores brushless actuales cuentan con un bobinado especial y no puedenconectarse directamente a la batería, si no que requieren un circuito electrónico que losmaneje, el variador ESC.
Este transmite la información del centro de control o emisora y proporciona una señaladecuada para el control de los motores. Un aspecto muy importante a tener en cuenta es lacorriente que va a circular por el sistema.
90

BEC (Battery Eliminator Circuit). La mayoría de los variadores incluyen un BEC,dispositivos que se emplean para reducir el voltaje de la batería y ofrecen una salida a 5 o 6voltios, que alimentará al receptor de radio.
6.2.3. Hélices
La hélice es el elemento que genera el empuje disponible para vencer la resistencia aero-dinámica y así poder avanza hacia delante. Es girada por el motor, transmitiendo su energíacinética al fluido en el que se mueve, acelerándolo y generando tracción. Las característicasque definen una hélice son el diámetro, el paso, el peso, el perfil aerodinámico y el númerode palas.
El perfil y su ángulo de ataque varían a medida que nos acercamos del centro a la punta,ya que la velocidad de la hélice en su zona central es menor y aumenta a medida que nosalejamos de su eje hacia la punta.
El paso de la hélice es el ángulo que forman las palas con la dirección del aire. Un pasopequeño aporta mejor rendimiento en el despegue, en subidas y ayuda a frenar el avión alralentí, son adecuadas por tanto para vuelos a baja velocidad. Por otra parte, un paso grandeaporta mejor rendimiento en el vuelo y son adecuadas para vuelos a altas velocidades.
Figura 6.4: Paso de la hélice.
Si para determinada potencia del motor el paso es muy grande la hélice se vuelve pesaday exige más potencia de la que el motor le puede dar y viceversa, si el paso es muy pequeñola hélice se vuelve ligera y no alcanzaría a absorber la potencia que brinda el motor.
Por tanto, la elección adecuada del paso y el diámetro es fundamental, ya que una malaelección podría incluso terminar quemando el variador, el motor o las baterías.
6.2.4. Batería.
Las baterías son la fuente de energía para el motor. Suministran energía eléctrica parapermitir su funcionamiento. Existen muchos tipos de baterías que son utilizadas hoy en díapor UAVs, como son las baterías de NiCd, de las NiMH y las de LiPo. Las baterías de polímerode litio (LiPo) son las más utilizadas en la actualidad ya que son las que presentan mayorcapacidad; presentan una mayor densidad de energía así como una tasa de descarga superior.Además tienen un tamaño más reducido que el resto de los tipos.
En este tipo de baterías cada celda tiene un voltaje nominal de 3.7 V que varía según laenergía almacenada, con voltaje máximo de 4.2 V y mínimo de 3 V. Si la energía almacenadabaja de éste valor mínimo la pila sufre daños irreparables, por lo tanto es conveniente respetarel valor.
91

Las celdas pueden agruparse en serie o en paralelo. Si se combinan en serie el voltaje delpack será la suma de los voltajes de cada celda, manteniéndose constante la capacidad. Sipor el contrario se colocan en paralelo, el voltaje total será el de la celda y la capacidad serála suma de todas, aumentando por tanto la autonomía.
Las celdas situadas en serie estarán limitadas por el motor y el ESC, que son los elementosque limitan el voltaje. Por otra parte, la capacidad necesaria vendrá dada por el tiempo devuelo requerido, y será la que imponga cuántas celdas hay que colocar en paralelo.
También es importante que la batería sea capaz de suministrar el consumo instantáneodemandado por el ESC ya que al no ser así, la batería podría sobrecalentar pudiendo llegara producir una deflagración.
Otra característica importante de las baterías es la capacida de descarga máxima continua,denominada Ç", que determinará la intensidad de descarga máxima continua de la batería.Este parámetro es determinante por ejemplo a la hora de recargar el pack de batería o desaber que se puede alimentar con él.
Por otra parte, la selección de la batería se hará teniendo en cuenta que al no ser muylarga la vida útil de este tipo de batería e ir perdiendo eficacia con el paso de los ciclos no esconveniente invertir demasiado, ya que habrá que renovarlo con asiduidad. Las baterías degama alta tienen precios muy elevados, por tanto la búsqueda se hará entre baterías de gamamedia, con buena relación calidad-precio.
6.3. Motor, hélice y batería.Para la selección de la combinación adecuada sel sistema propulsivo se utilizará, como se
dijo en la introducción, el programa Motocalc. Para comenzar se introduce en el programala geometría de la aeronave y las solicitaciones y este devuelve una lista con los motores quepueden ser posibles candidatos. Una vez escogido el motor, se definen las características de lahélice y de la batería, que serán decisivas a la hora de determinar la autonomía y el empujeproporcionado.
6.3.1. Motor
El motor elegido para el prototipo es por tanto un motor de tipo brushless outrunner. Paraseleccionar entre la amplia variedad de motores de este tipo se hizo un estudio en Motocalc.Introduciendo las características del uav el programa devuelve una lista con las mejoresopciones. Tras esto se escogió como motor el Turnigy RotoMax 50 cc Brushless Outrunner.
Las características del mismo proporcionadas por el fabricante son las recogidas en laTabla (mk).
rpm/V 172 kvMáxima corriente 120 APotencia 5300 wCorriente a carga nula (I0) a 44 V 1.65 AMáximo voltaje 44 VResistencia interna (Rm) 21 mohmDiámetro del eje 10 mmPeso 1080 g
Cuadro 6.1: Turnigy RotoMax 50 cc Brushless Outrunner.
92

Figura 6.5: Turnigy RotoMax 50 cc Brushless Outrunner.
Las dimensiones del motor serán las representadas en la Figura 6.6 y sus medidas lasrecogidas en la Tabla 6.2
A 10 mmB 102 mmC 80 mmD 50 mmE 142 mm
Cuadro 6.2: Dimensiones del motor.
Figura 6.6: Dimensiones del motor.
Una vez situado el motor es necesario darle un valor de incidencia. Para ello se tomael ejelongitudinal del UAV y se le da una orientación al motor respecto a este hacia abajo y quizáa la derecha, debido a que el aire se opone al giro de la hélice y es necesario compensar elpar motor. Los grados dependerán de la configuración final y es necesario hacer un estudiohaciendo pruebas una vez montado el avión. Aun así, si da para comenzar un ángulo deincidencia del motor hacia abajo de 2circ y otros 2circ hacia la derecha, que son valores quesuelen ser suficiente para contrarrestar ese par.
93

6.3.2. Hélice
En cuanto a la elección de la hélice se toma la recomendada por el fabricante, cuyasmedidas son 24 x 12 2se pasa a comprobar que es adecuada para el UAV. Existen dos factoresimportantes a la hora de determinar si se ha hecho bien el dimensionado preliminar de lahélice: que la velocidad en las puntas de las palas de la hélice sea subsónica y que la velocidadsupere en 2.5-3 veces a la velocidad de entrada en pérdida.
La hélice utilizada será del tipo de la que aparece en la Figura 6.7.
Figura 6.7: Hélice bipala.
Velocidad de la hélice. La velocidad de entrada en pérdida es un factor determinante ala hora de seleccionar la configuración de la hélice. Esta está asociada a su vez al tipo de perfily a la carga alar. Conociendo ambos se puede calcular por tanto la velocidad de entrada enpérdida, que servirá de ayuda a la hora de seleccionar la pala.
Utilizando, como ya se ha dicho, los datos recomendados por el fabricante, 24 x 12", ysabiendo que las rpm del motor son 172 Kv x 37 V de la batería:
300x172x37 = 1909200mm/min = 114552000mm/h = 114,552km/h = 31,82m/s
Que es entre dos y tres veces superior a la velocidad de vuelo mínima, 10 m/s, por lo queel diámetro utilizado es suficiente.
Velocidad en la punta de las palas. El diámetro máximo posible de las palas viene dadopor la velocidad de las puntas de las mismas. El número de Mach en las puntas ha de sersubsónico para obtener una mayor eficiencia y disminuir el ruido.
Esta velocidad se define a partir de una suma vectorial de la velocidad de avance del UAVy la velocidad de rotación de la hélice, que se define en la siguiente ecuación:
V =√V 2 + V 2
punta =√V 2 + (n · π ·D)2
Siendo "n"las revoluciones por segundo a la que gira la hélice, que vienen dadas por elgiro del eje del motor (6364 rpm). Es valor del número de Mach será siempre menor que launidad, ya que el rango de velocidades de vuelo de la aeronave es muy bajo.
6.3.3. Batería
Es sabido que el ESC y el motor limitarán la carga de la batería. En el caso del motorescogido, el fabricante recomienda utilizar un ESC de 180 A y 12 S. Por otra parte, enlas recomendaciones del motor también se incluye baterías de tipo LiPo de 10 S (número deceldas) suministrando 37 V. Para la selección de la batería se hará uso del programa MotoCalc,donde se buscará una batería en base al motor escogido que proporcione resultados que seajusten a las necesidades del UAV.
94

La batería escogida fue un ZIPPY Compact 5000 mAh 10 S 25 C Lipo Pack. Se decidióutilizar tres batería conectadas en paralelo para conseguir la autonomía impuesta en losrequisitos (1 hora aproximadamente). Las características de la batería utilizada serán las quese reocogen en la Tabla 6.3.
Capacidad (celdas en paralelo) 3 · 5000 = 15000 mAhVoltaje (celdas en serie) 10 · 3.7 = 37 VCapacidad de descarga 25 CPeso 3.801 kg
Cuadro 6.3: Especificaciones de la batería, tres de tipoZippy Compact 5000 mAh 10 S 25 C Lipo Pack
Figura 6.8: Añadir datos.
En cuanto a las dimensiones de la batería, están señaladas en la Figura 6.8 y se recogenen la Tabla 6.4.
A 163 mmB 46 mmC 74 mm
Cuadro 6.4: Especificaciones de la batería, se utilizarán tres conectadas en paralelo del tipoZippy Compact 5000 mAh.
6.4. ResultadosEn esta última sección se recogen los resultados tras el análisis del sistema motor en
MotoCalc. Para la combinación utilizada, la velocidad óptima de vuelo será 18.5 m/s con lapalanca al 82 %, permitiéndose un vuelo de 88 minutos 14 segundos a 500 metros de altitud,por lo que se satisface el requisito de autonomía impuesto. Se hará un estudio de la potencia,el empuje y el rendimiento en el caso de que la palanca esté en la posición óptima (throttle83 %) y al máximo (throttle 100 %).
En primer lugar se hará una estudio de la potencia. En la Figura 6.9 se representa lapotencia que es suministrada al motor.
95

(a) Potencia suministrada al motor para throttle 82 % (b) Potencia suministrada al motor para throttle 100 %
Figura 6.9: Potencia suministrada al motor.
Se puede observar que la gráfica es constante hasta que llega a una determinada velocidad,donde empieza a caer. Esto se debe a que a medida que aumenta el valor de la velocidad, tantola hélice como el motor se hacen más eficientes, por lo que el motor reducirá su intensidad,lo que implacará mayor autonomía, debido a que la batería se descagará más lentamente.
Por otra parte, la potencia será menor a medida que disminuya la posición de palanca,ya que al 100 % el motor trabajará más y se conseguirá una mayor potencia, por lo que labatería se descargará más rápido y disminuirá la autonomía. Esta variación de la duración dela batería con respecto a la velocidad se refleja en la Figura 6.10, donde se observa que, efec-tivamente, el tiempo de duración aumenta al aumentar la velocidad y disminuye al aumentarla posición de palanca. También se añaden en la Figura 6.11 las gráficas para ver la eficienciadel conjunto, que aumenta, como ya se ha dicho, al aumentar la velocidad, y disminuye alaumentar la posición de palanca.
(a) Tiempo en función de la velocidad de vuelo parathrottle 82 %
(b) Tiempo en función de la velocidad de vuelo parathrottle 100 %
Figura 6.10: Tiempo en función de la velocidad de vuelo.
96

(a) Rendimiento total para throttle 82 %. (b) Rendimiento total para throttle 100 %.
Figura 6.11: Rendimiento total.
En cuanto a la potencia que proporciona el motor al eje, queda representada para amboscasos en la Figura 6.12, junto con la pérdida de potencia que se experimenta en relación conla de entrada al motor, debido a pérdidas eléctricas por la resistencia interar y mecánicas.La tendencia de la gráfica es igual al caso anterior, solo que aplicando la reducción de estapérdida, que aumenta con la posición de palanca y disminuye con la velocidad.
(a) Potencia proporcionada al eje para throttle 82 %. (b) Potencia proporcionada al eje para throttle 100 %.
Figura 6.12: Potencia porporcionada al eje.
Por otra parte, se calcula el empuje que va a proporcionar la hélice para mover el fluido(Figura 6.13). Este empuje está afectado por el rendimiento de la hélice, ya que afectará a lapotencia que proporcione la hélice, siendo menor que la que recibe del eje del motor.
97

(a) Empuje proporcionado por la hélice para throttle82 %.
(b) Empuje proporcionado por la hélice para throttle100 %.
Figura 6.13:
Se puede observar como la hélice es más eficiente a medida que aumenta la velocidad devuelo (Figura 6.14), por lo que se entiende que el empuje suministrado por la misma (Figura6.13) sea mayor a medida que aumenta la velocidad.
(a) Rendimiento de la hélice para throttle 82 %. (b) Rendimiento de la hélice para throttle 100 %.
Figura 6.14: Rendimiento de la hélice.
98

Capítulo 7
Conclusiones
En los últimos años la industria de los UAVs ha experimentado un crecimiento exponencial,debido a que cada vez son más demandados los UAVs para aplicaciones civiles. Con el diseñode esta aeronave se pretendía conseguir desarrollar un vehículo que fuese capaz de transportaruna carga de pago de 4 kg para misiones que se incluyen en esa categoría.
Para lograrlo se ha hecho un estudio en varios campos de conocimiento, como son laaerodinámica, el diseño, la estabilidad, las estructuras y la propulsión. Con la aplicación deingeniería concurrente se ha mantenido una correlación entre las diversas áreas, de maneraque se ha profundizado en todas al mismo nivel, recordándo todos los conocimientos quehabían sido impartidos a lo largo de la carrera, consiguiendo tener una idea más sólida de loque se había aprendido hasta ahora.
Es necesario añadir que los métodos empleados en el desarrollo del proyecto son aproxi-mados pero no aportan resultados completamente reales. Se darán ahora una serie de reco-mendaciones que podrían llevarse a cabo en caso de querer mejorar los resultados obtenidos.Estas son:
Definir misiones concretas para el empleo del UAV.
Realizar un estudio sobre las actuaciones de la aeronave en los distintos tramos de vuelo.
Estudiar para los casos anteriores el diagrama de carga de pago.
Hacer un estudio detallado de la posición del tren de aterrizaje calculando el ángulo deaterrizaje.
Estudio de los modos de vibración de la estabilidad dinámica del avión.
Realizar un estudio en CFD para conocer de manera exacta los datos para el cálculode la estabilidad y la aerodinámica.
Hacer estudios en túneles de viento.
Realizar un estudio de la estructura en Nastran-Patran.
99

100

Bibliografía
[1] http : //mecanica.eafit.edu.co/ sorrego/ALAUAVF INAL.pdf
[2] Lee Van Tassle. Calculador de Diseño de Aviones. Documento de excel.
[3] Jan Roskam. Airplane flight dynamics and automatic flight controls. DARcorporation,5th edition, 2007.
[4] Daniel P. Raymer. Aircraft design :a conceptual approach. American Institute of Aero-nautics and Astronautics (AIAA), 5th edition, 2012.
[5] NASA-CR-1975. Frederick O. Smetana, Delbert C. SUmmey & W. Donald Johnson. Ri-ding and Handling Qualities of Light Aircraft: A Review and Analysis. March 1972.
[6] Sergio Esteban Roncero. Apuntes de la Asignatura: Cálculo de Aeronaves. 2013-2014.
[7] Francisco Gavilán Jiménez & Damián Rivas Rivas. Introducción a la Estabilidad Dinámicade Aviones. Mecánica del Vuelo. 4ž curso de Grado en Ingeniería Aeroespacial. Curso2013-2014.
[8] Damián Rivas Rivas & Sergio Esteban Roncero. Mecánica del Vuelo. Grado en IngenieríaAeroespacial. 4ž curso. Sevilla, septiembre de 2013.
[9] Sergio Esteban Roncero. Estimación del MAC. Cálculo de Aviones, 2011.
[10] Bandu N. Pamadi. Performance, stability, dynamics, and control of airplanes. AmericanInstitute of Aeronautics and Astronautic (AIAA), 2nd edition, 2004.
[11] http : //aerospace.illinois.edu/m− selig/ads/coorddatabase.html (Base de datos paraperfiles aerodinámicos).
[12] Marcelo Martínez. 1ž conferencia de Vehículos Aéreos No-Tripulados (UAV) de AméricaLatina. TACTICAL UNMANNED AERIAL VEHICLE SIZING. Argentina, 2007
[13] Manuel García Rivero. Diseño de un UAV ligero de propulsión eléctrica para monitori-zación ambiental. Noviembre 2010.
[14] Sergio Esteban Roncero. TUTORIAL: Cómo dibujar un perfil aerodinámico en Catiapaso a paso.
[15] Grupo 01. Diseño conceptual de un UAV. Asignatura Cálculo de Aeronaves. 2007-2008.
[16] Grupo 05. Proyecto Fénix. Asignatura Cálculo de Aeronaves. 2007-2008.
[17] Mateo Riquelme Bernal. Diseño y construcción de un avión no tripulado basado ensistemas y dispositivos COTS.
[18] Inés Iváñez del Pozo. Análisis y modelización de vigas sandwich sometidas a impactosde baja velocidad. Junio 2013.
101

[19] Rafael Escamilla Nuñez. Diseño, Construcción, Instrumentación y Control de un VehículoAéreo No Tripulado (UAV). Noviembre 2010.
[20] http : //repository.eafit.edu.co/bitstream/handle/10784/1387/MejiaMonteroJoseLuis2013.pdf?sequence =
[21] http : //ecobalsaperu.blogspot.com.es/2010/07/prueba.htm
[22] http : //www.investinspain.org/invest/wcm/idc/groups/public/documents/documento/mda0/ndqw/ edisp/4440127.pdf
[23] http : //www.cedom.gov.ar/es/legislacion/normas/codigos/edifica/82.html
[24] Joseph A. Schetz. Designing Unmanned Aircraft Systems: A Comprehensive Approach.Virginia Polytechnic Institute and State University Blacksburg, Virginia.
102


















