
Raúl Calao Rebouleen y Carlos Zepeda Chehaibargrupoeducare.com/dct/images/ATR_cranebott/Flipbook...
20
ISBN 978-607-7273-23-3 9 786077 273233 Raúl Calao Rebouleen y Carlos Zepeda Chehaibar
Transcript of Raúl Calao Rebouleen y Carlos Zepeda Chehaibargrupoeducare.com/dct/images/ATR_cranebott/Flipbook...
ISBN 978-607-7273-23-3
9 786077 273233
Raúl Calao Rebouleen y Carlos Zepeda Chehaibar
6Arma tu robot ¦ Cranebott
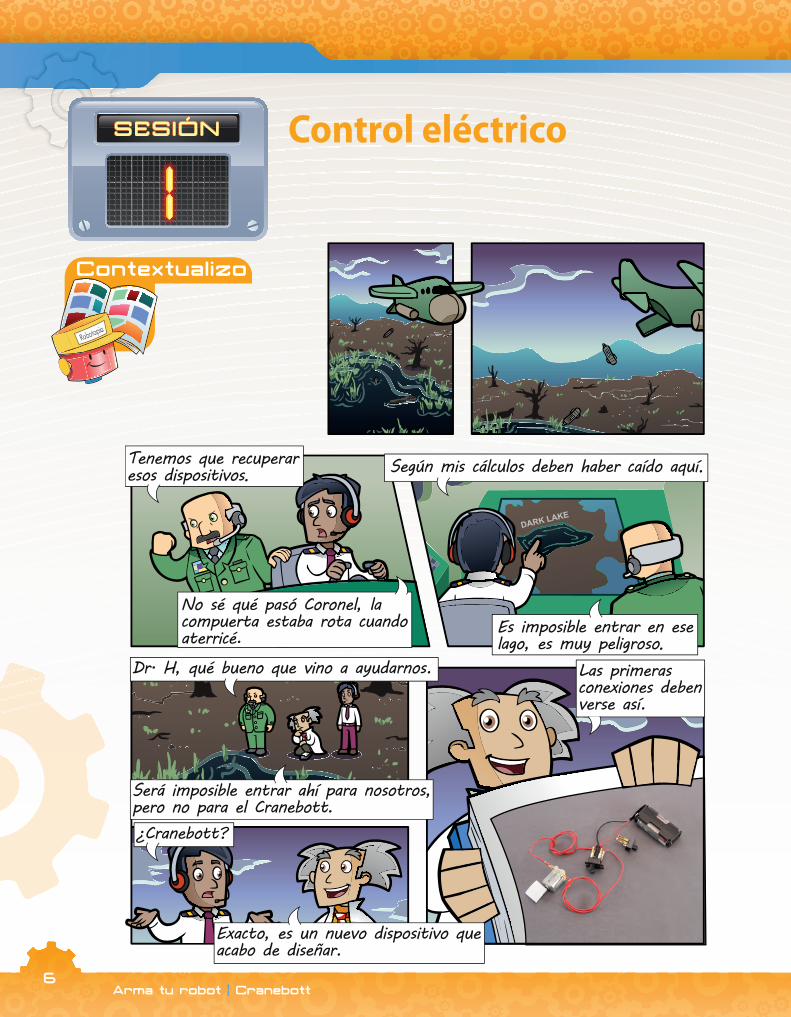
No sé qué pasó Coronel, la compuerta estaba rota cuando aterricé
Según mis cálculos deben haber caído aquíTenemos que recuperar esos dispositivos
Dr. H, qué bueno que vino a ayudarnos
Será imposible entrar ahí para nosotros, pero no para el Cranebott¿Cranebott?
Las primeras conexiones deben verse así
Exacto, es un nuevo dispositivo que acabo de diseñar
Es imposible entrar en ese lago, es muy peligroso
Control eléctrico
1SESIÓN
Contextualizo

7Sesión 1 ¦ Control eléctrico
Analiza cuidadosamente los materiales que necesitarás para el proyecto:
Examino
Incluidos en el kit: No incluidos:A. 3 interruptores de
desplazamientoB. 1 metro de cableC. Motor CDD. 10 zapatasE. PortabateríasF. Broche para pila
G. 2 baterías AAH. Pinzas de puntaI. Pinzas pelacablesJ. Rectángulo de
papel 2x4cmK. Silicón fríoL. Cinta de aislar M. Silicón N. Pistola de silicón
A
B
C
D
N
M
E
F
L G
H
I
J
K
LISTA DE MATERIALES

8Arma tu robot ¦ Cranebott
Antes de comenzar, observa el video de armado disponible en el micrositio web (www.robotopia.mx).
Sigue las instrucciones que se muestran a continuación para realizar tu proyecto.
Usa las pinzas pelacables para eliminar medio centímetro de aislante de cada uno de los cables del broche para baterías.
1
2
Armo
Dobla los cables sin aislante como se muestra en el esquema.
1
9Sesión 1 ¦ Control eléctrico
3
4
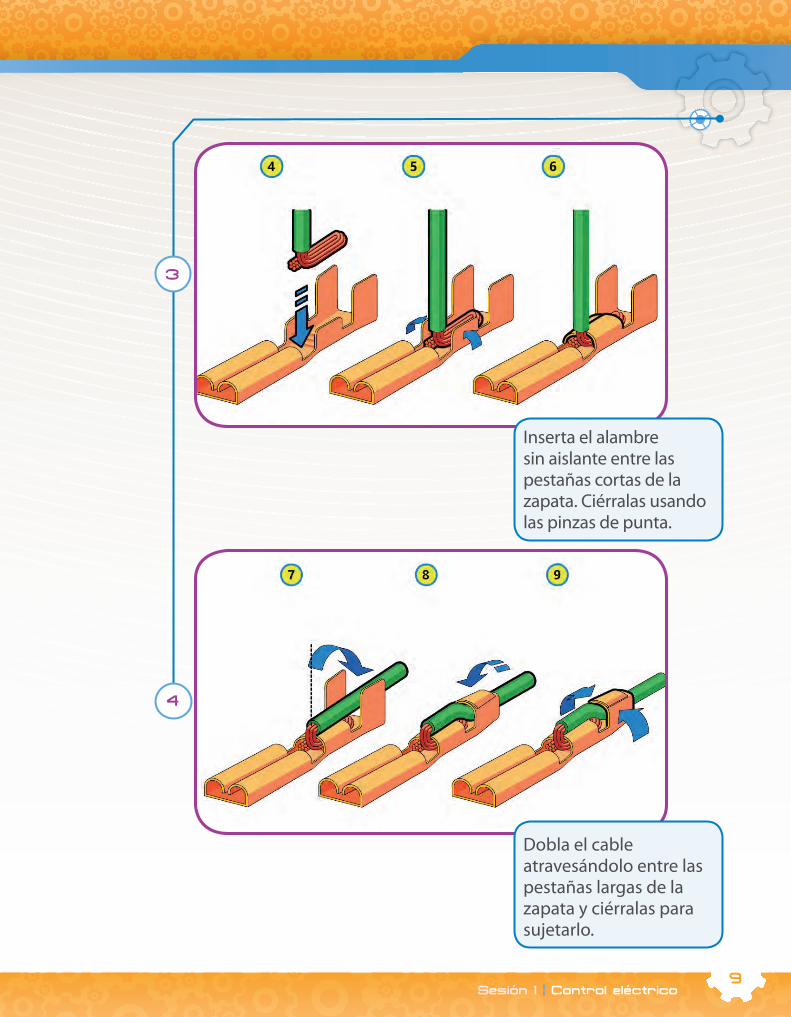
Inserta el alambre sin aislante entre las pestañas cortas de la zapata. Ciérralas usando las pinzas de punta.
Dobla el cable atravesándolo entre las pestañas largas de la zapata y ciérralas para sujetarlo.
10Arma tu robot ¦ Cranebott
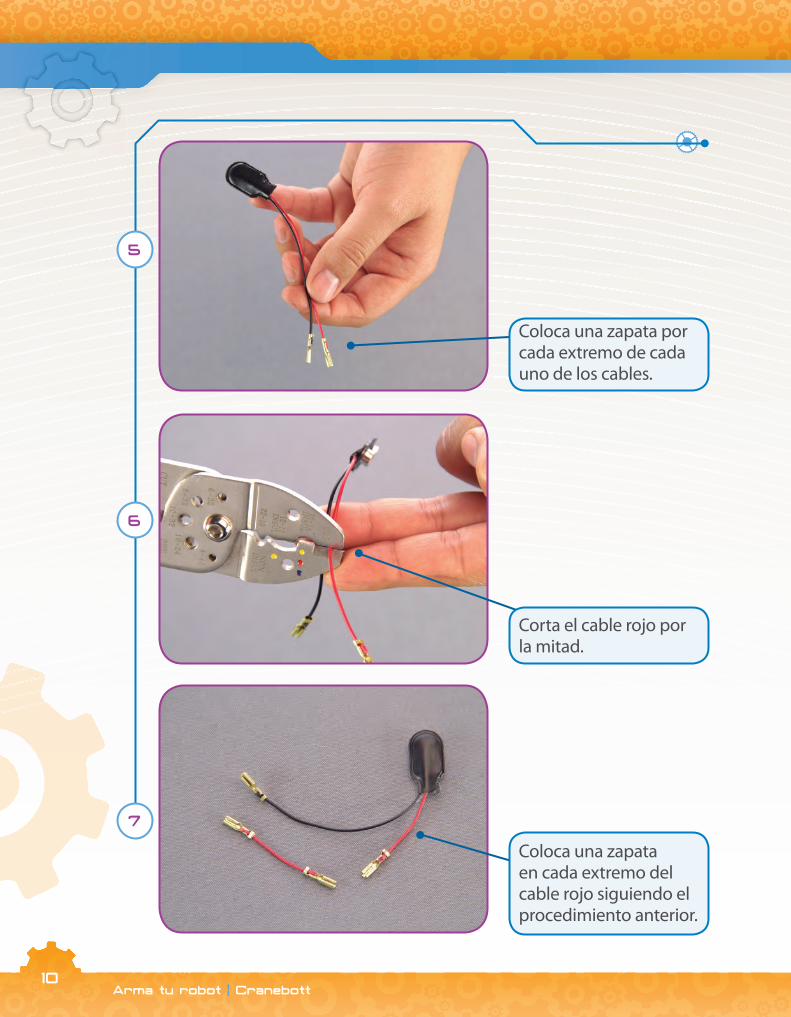
Coloca una zapata por cada extremo de cada uno de los cables.
Corta el cable rojo por la mitad.
Coloca una zapata en cada extremo del cable rojo siguiendo el procedimiento anterior.
5
6
7
11Sesión 1 ¦ Control eléctrico
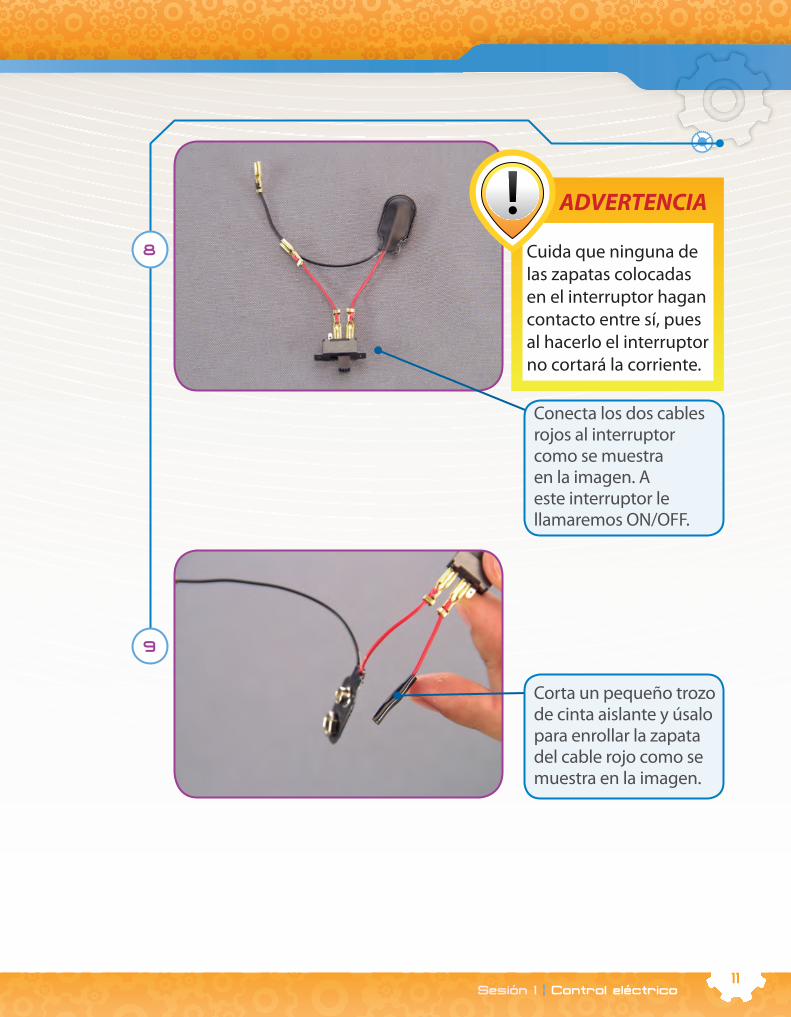
Conecta los dos cables rojos al interruptor como se muestra en la imagen. A este interruptor le llamaremos ON/OFF.
Corta un pequeño trozo de cinta aislante y úsalo para enrollar la zapata del cable rojo como se muestra en la imagen.
8
9
ADVERTENCIA
Cuida que ninguna de las zapatas colocadas en el interruptor hagan contacto entre sí, pues al hacerlo el interruptor no cortará la corriente.
12Arma tu robot ¦ Cranebott
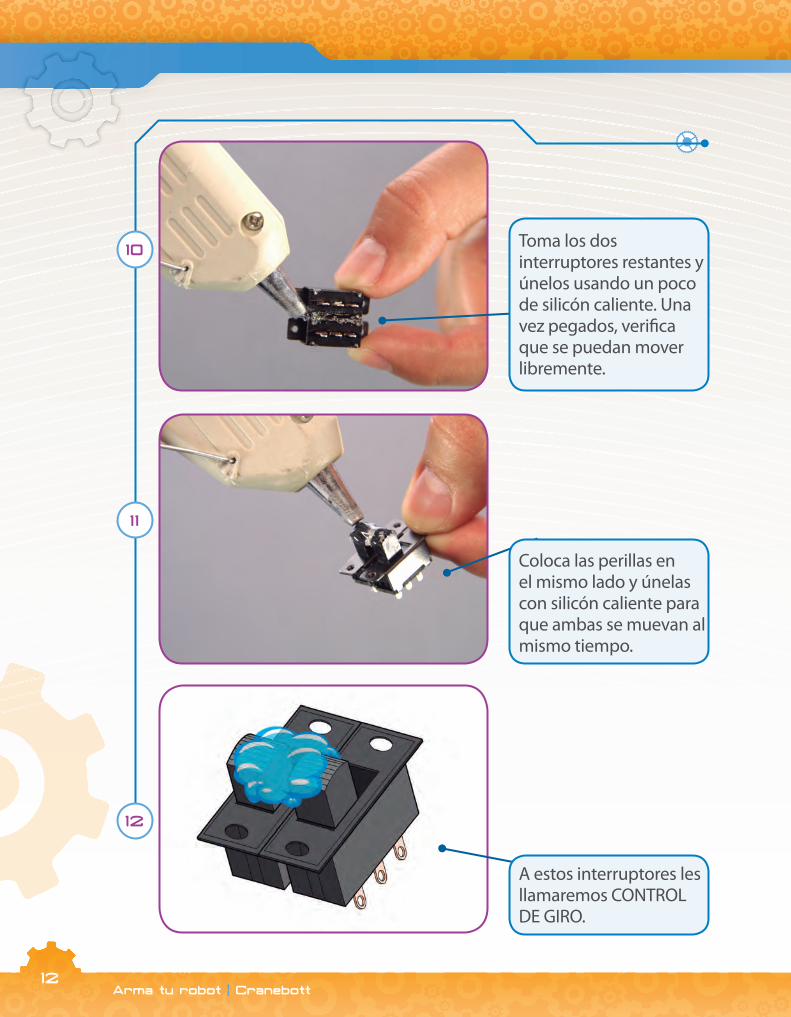
Toma los dos interruptores restantes y únelos usando un poco de silicón caliente. Una vez pegados, verifica que se puedan mover libremente.
Coloca las perillas en el mismo lado y únelas con silicón caliente para que ambas se muevan al mismo tiempo.
A estos interruptores les llamaremos CONTROL DE GIRO.
10
11
12

13Sesión 1 ¦ Control eléctrico
Corta dos segmentos de 3cm del cable. A continuación, divide el restante de cable por la mitad.
Quita medio centímetro de aislante en cada uno de los extremos de los cables.
Une un cable largo y uno corto, colocando una misma zapata en uno de los extremos de cada cable.
13
14
15
14Arma tu robot ¦ Cranebott
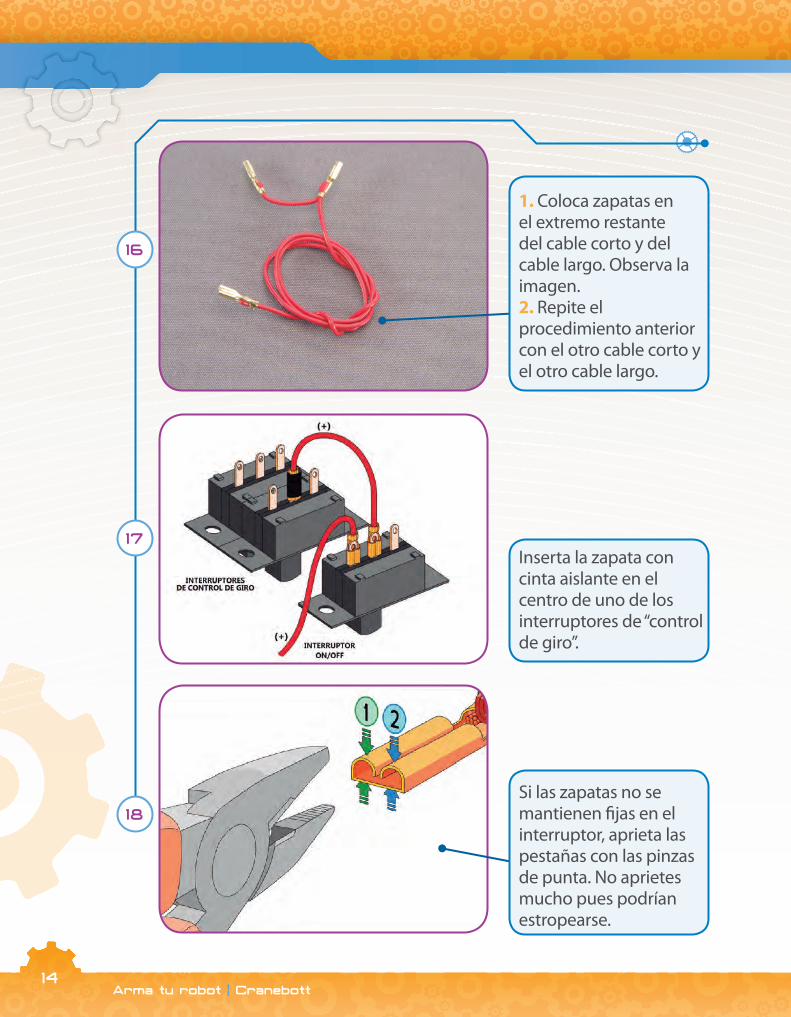
1. Coloca zapatas en el extremo restante del cable corto y del cable largo. Observa la imagen.2. Repite el procedimiento anterior con el otro cable corto y el otro cable largo.
Si las zapatas no se mantienen fijas en el interruptor, aprieta las pestañas con las pinzas de punta. No aprietes mucho pues podrían estropearse.
Inserta la zapata con cinta aislante en el centro de uno de los interruptores de “control de giro”.
16
17
18
15Sesión 1 ¦ Control eléctrico
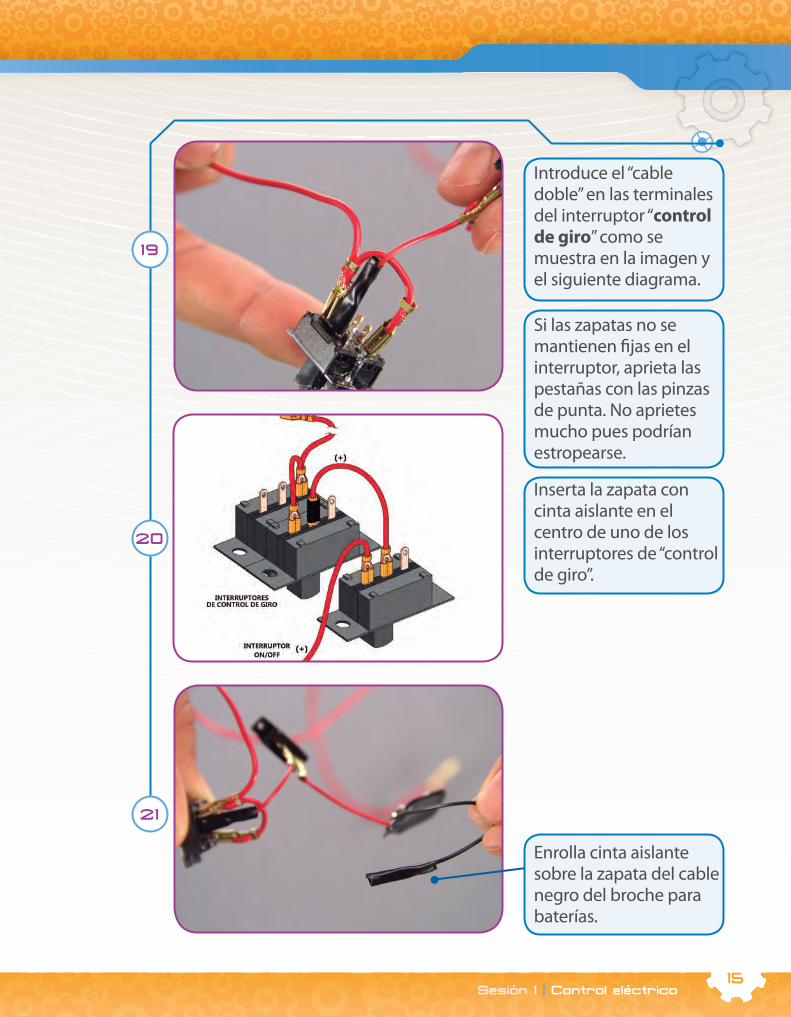
Introduce el “cable doble” en las terminales del interruptor “control de giro” como se muestra en la imagen y el siguiente diagrama.
Si las zapatas no se mantienen fijas en el interruptor, aprieta las pestañas con las pinzas de punta. No aprietes mucho pues podrían estropearse.
Inserta la zapata con cinta aislante en el centro de uno de los interruptores de “control de giro”.
Enrolla cinta aislante sobre la zapata del cable negro del broche para baterías.
19
20
21
16Arma tu robot ¦ Cranebott
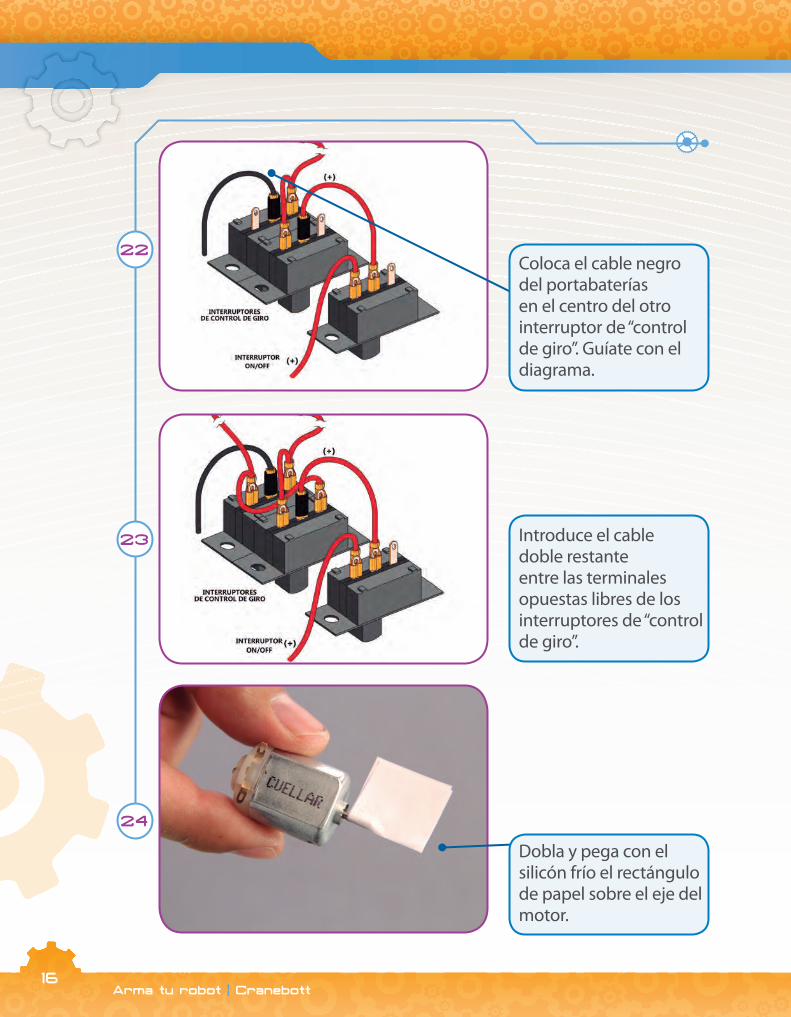
Coloca el cable negro del portabaterías en el centro del otro interruptor de “control de giro”. Guíate con el diagrama.
Dobla y pega con el silicón frío el rectángulo de papel sobre el eje del motor.
Introduce el cable doble restante entre las terminales opuestas libres de los interruptores de “control de giro”.
22
23
24
17Sesión 1 ¦ Control eléctrico
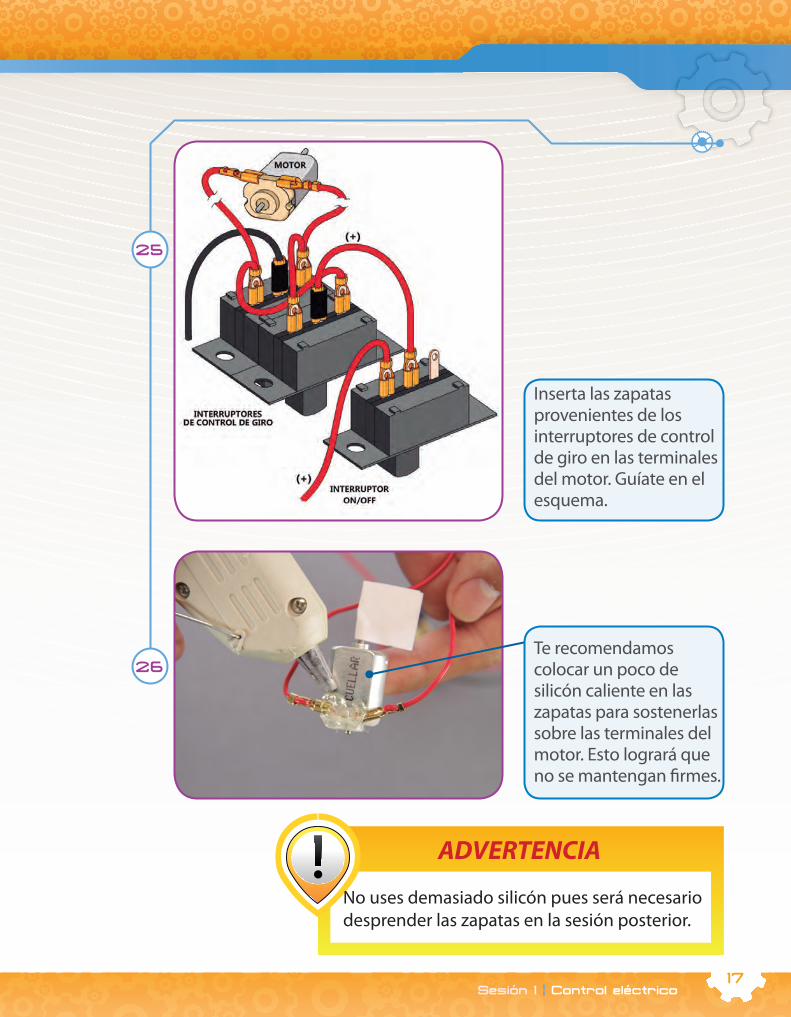
Inserta las zapatas provenientes de los interruptores de control de giro en las terminales del motor. Guíate en el esquema.
Te recomendamos colocar un poco de silicón caliente en las zapatas para sostenerlas sobre las terminales del motor. Esto logrará que no se mantengan firmes.
25
26
ADVERTENCIA
No uses demasiado silicón pues será necesario desprender las zapatas en la sesión posterior.

18Arma tu robot ¦ Cranebott
Realiza lo que se te pide.
Seguramente has notado que las baterías tienen un signo de + en un lado y un signo de – en el otro, esto se debe a que la energía eléctrica tiene cargas positivas y cargas negativas. Ambas cargas son necesarias para que los dispositivos eléctricos funcionen.
1
Exploro
Conecta el broche al portabaterías para finalizar con el armado.
27
¡Listo!
19Sesión 1 ¦ Control eléctrico
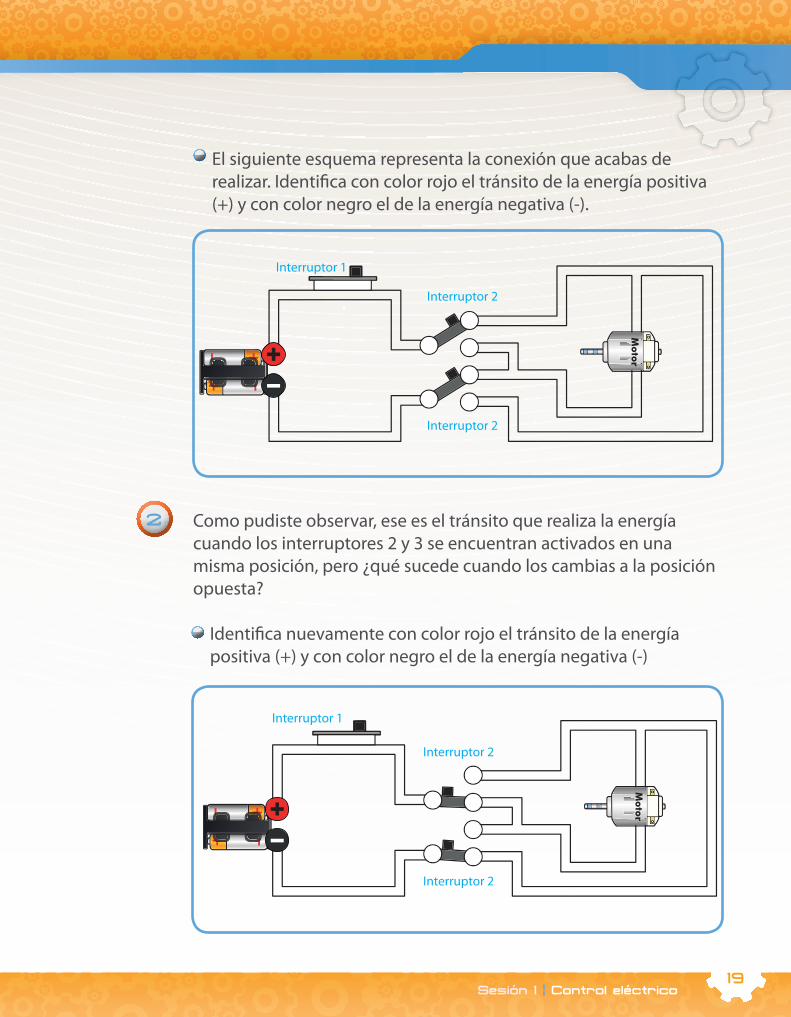
El siguiente esquema representa la conexión que acabas de realizar. Identifica con color rojo el tránsito de la energía positiva (+) y con color negro el de la energía negativa (-).
2 Como pudiste observar, ese es el tránsito que realiza la energía cuando los interruptores 2 y 3 se encuentran activados en una misma posición, pero ¿qué sucede cuando los cambias a la posición opuesta?
Interruptor 1
Interruptor 2
Interruptor 2
Identifica nuevamente con color rojo el tránsito de la energía positiva (+) y con color negro el de la energía negativa (-)
Interruptor 1
Interruptor 2
Interruptor 2
20Arma tu robot ¦ Cranebott
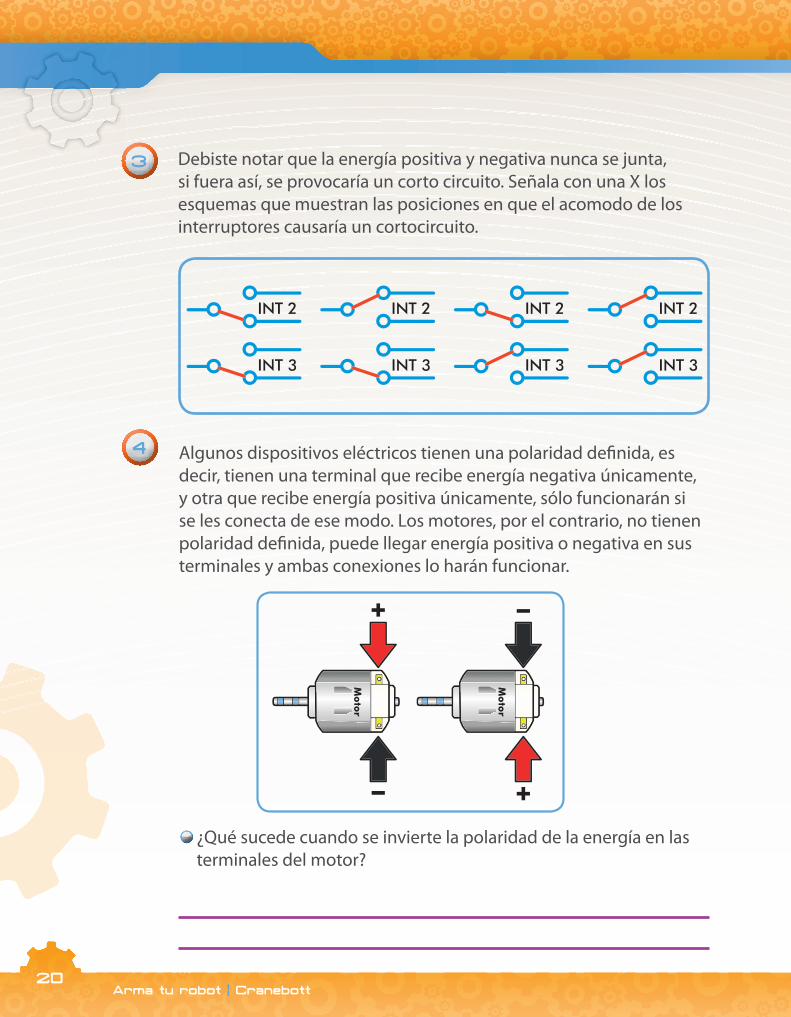
Debiste notar que la energía positiva y negativa nunca se junta, si fuera así, se provocaría un corto circuito. Señala con una X los esquemas que muestran las posiciones en que el acomodo de los interruptores causaría un cortocircuito.
3
INT 2
INT 3
INT 2
INT 3
INT 2
INT 3
INT 2
INT 3
Algunos dispositivos eléctricos tienen una polaridad definida, es decir, tienen una terminal que recibe energía negativa únicamente, y otra que recibe energía positiva únicamente, sólo funcionarán si se les conecta de ese modo. Los motores, por el contrario, no tienen polaridad definida, puede llegar energía positiva o negativa en sus terminales y ambas conexiones lo harán funcionar.
¿Qué sucede cuando se invierte la polaridad de la energía en las terminales del motor?
4

21Sesión 1 ¦ Control eléctrico
5
Los interruptores de deslizamiento trabajan internamente de la siguiente manera:
La terminal 2 funciona como entrada de energía y las terminales 1 y 3 como salidas. Cuando el interruptor se encuentra a la izquierda la corriente circula entre las terminales 1 y 2, y cuando se encuentra a la derecha, circula entre las terminales 2 y 3. Modifica las conexiones de tus interruptores desconectando los interruptores señalados en el siguiente esquema:
Interruptor hacia la izquierda
Interruptor hacia la derecha
Entrada
SalidaSalida
Entrada
Interruptores de dirección
Interruptor ON/ OFF
22Arma tu robot ¦ Cranebott
¿Qué sucede? ¿A qué crees que se debe?
6
7
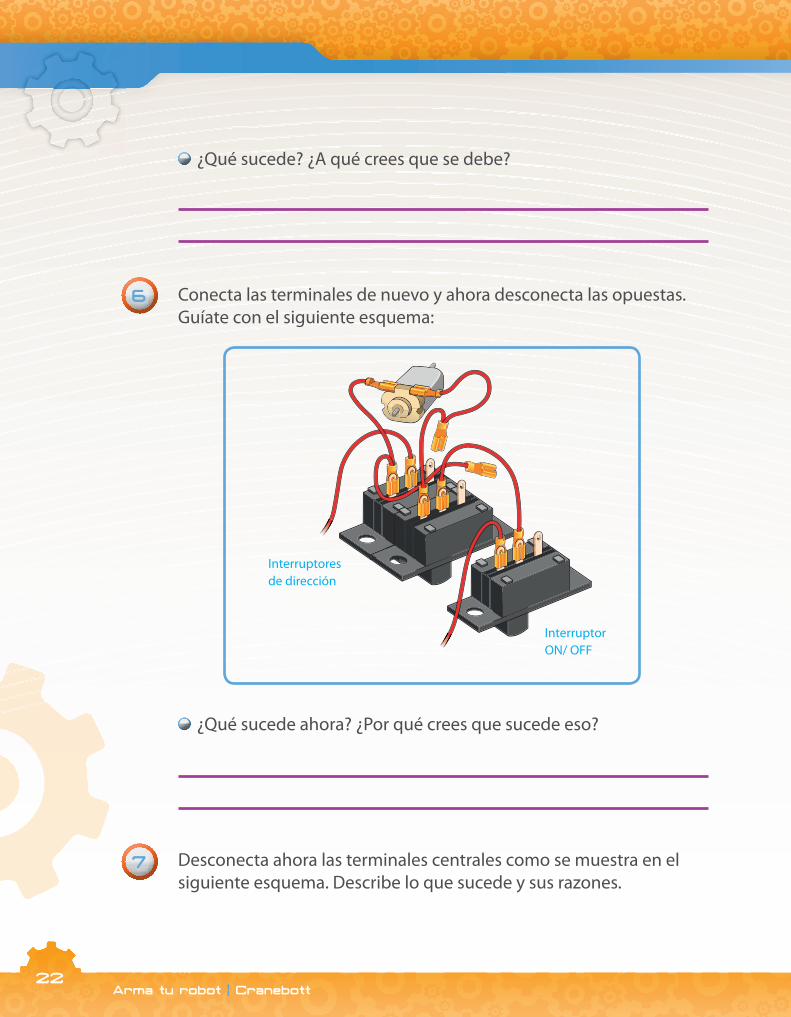
Conecta las terminales de nuevo y ahora desconecta las opuestas. Guíate con el siguiente esquema:
¿Qué sucede ahora? ¿Por qué crees que sucede eso?
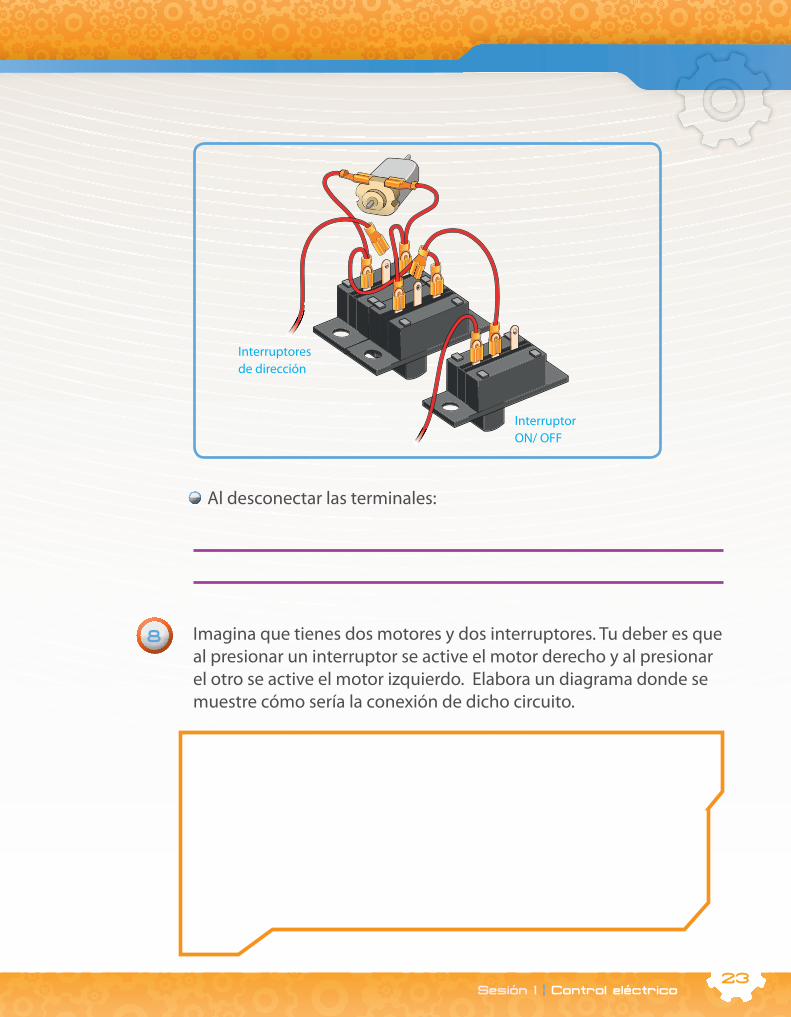
Desconecta ahora las terminales centrales como se muestra en el siguiente esquema. Describe lo que sucede y sus razones.
Interruptores de dirección
Interruptor ON/ OFF
23Sesión 1 ¦ Control eléctrico
8
Al desconectar las terminales:
Imagina que tienes dos motores y dos interruptores. Tu deber es que al presionar un interruptor se active el motor derecho y al presionar el otro se active el motor izquierdo. Elabora un diagrama donde se muestre cómo sería la conexión de dicho circuito.
Interruptores de dirección
Interruptor ON/ OFF
24Arma tu robot ¦ Cranebott
Anota todo lo que aprendiste en la bitácora de viaje Robotopia.
Concluyo


















