Reguladores de Velocidad

of 27
Transcript of Reguladores de Velocidad
-
Pgina 1
Edicin N 002
Mayo 2005 Lugar de Edicin
INACAP Capacitacin Nmero de serie
MAT-0500-00-000
REGULADORES DE VELOCIDAD
CA
PA
CI
TA
CI
N
-
Pgina 2
REGULACIN DE VELOCIDAD DE LAS TURBINAS HIDRULICAS.
Interpretamos por regulacin el proceso mediante el cual se mantiene constante una magnitud o condicin definida aunque varen determinados factores como puede ser la carga solicitada a un grupo de tensin de lnea, la temperatura de una mezcla, etc.
En este caso nos vamos a centrar en la regulacin de velocidad de las turbinas hidrulicas y en consecuencia, en la regulacin de velocidad de las mquinas que hemos definido como grupos.
En el caso concreto que nos ocupa, la magnitud objeto de la regulacin es la velocidad o nmero de revoluciones por minuto a que ha de girar el rodete de la turbina, con el fin de que, por medio del eje se transmita el giro uniforme que debe de existir y mantenerse entre dicho rodete y el rotor del alternador.
Cuando se produce una variacin en la carga solicitada al grupo, es decir, segn aumente o disminuya el par resistente que acta sobre la turbina, esta tender respectivamente a reducir o aumentar el nmero de revoluciones con que estuviese en funcionamiento normal antes de producirse la variacin de carga. En tales condiciones, el funcionamiento de la turbina sera totalmente inestable. llegando a parase al aumentar la carga y a embalarse cuando sta disminuyese.
Podernos llegar a establecer un smil, con el comportamiento del motor de un automvil en el que, al subir o bajar fuertes pendientes, solamente le funcionase la directa de su caja de cambios y, el acelerador, se mantuviese en el punto fijo conveniente a su marcha normal sobre terreno llano. Es obvio que, durante los sucesivos ascensos y descensos, el motor tendera, respectivamente, a reducir y aumentar el nmero de revoluciones, llegndose a parar o embalarse segn la magnitud de dichas pendientes. Aunque lgicamente se vera afectada, prescindimos de considerar la velocidad propia del vehculo en s.
Dado que en la realidad las cargas solicitadas varan constantemente, es necesario adaptar el trabajo motor al resistente, y esto se consigue graduando adecuadamente el paso de agua hacia el rodete. Al regular el caudal de agua preciso para cada valor de carga en cada instante se dispondr de la potencia requerida debindose obtener al mismo tiempo el numero de revoluciones de funcionamiento normal de la turbina.
Velocidad de giro de una turbina hidrulica.
La velocidad de giro, conocida tambin como velocidad nominal, velocidad sincrnica de la turbina o velocidad de sincronismo del grupo, depende fundamentalmente de la frecuencia a que ha de ser suministrada la corriente elctrica, normalmente de 50 perodos por segundo, y del nmero de pares de polos del alternador, adems de otros factores que determinan precisamente las
-
Pgina 3
caractersticas de ste ltimo, como son altura del salto de agua, potencia, tensin generada, etc.
Por considerar de ciertos valores la expresin de la frmula que determina el nmero de revoluciones de funcionamiento normal de un grupo, la exponemos a continuacin,
Tenemos:
en la que: n = nmero de revoluciones por minuto (r.p.m.).
f = frecuencia del sistema 50 perodos por segundo (p.p.s ).
P = nmero de pares de polos del alternador (Pe mayscula).
60 = segundos en un minuto.
Ejemplo: Cul es el nmero de r.p.m. a que deber de girar el eje de un grupo, cuyo alternador tiene 16 pares de polos, siendo el suministro de corriente a 50 p.p.s.
Caso de operar con el nmero total de polos, que identificaremos por p (pe minscula), la frmula anterior se transforma del modo siguiente:
;
Tendremos, para el ejemplo anterior:
16 pares de polos = 32 polos
-
Pgina 4
Los valores de la velocidad de giro n, en las turbinas hidrulicas estn comprendidos entre 75 r.p.m. y 1000 r.p.m., segn se deduce de la Tabla 1. No obstante, todos los tipos de turbinas se proyectan para poder soportar, momentneamente, velocidades muy superiores a las de funcionamiento normal, surgidas ante las variaciones de carga, segn consideraremos en breve.
TABLA 1 - VELOCIDADES DE SINCRONISMO DE LOS GRUPOS ACCIONADOS POR TURBINAS HIDRULICAS.
N pares de polos
Velocidad en rpm
N pares de polos
Velocidad en rpm
N pares de polos
Velocidad en rpm
N pares de polos
Velocidad en rpm
40 75 28 107.1 18 166.7 8 375 38 78.9 26 115.4 16 187.5 7 428.6 36 83.3 24 125 14 214.3 6 500 34 88.2 23 130.4 13 230.8 5 600 32 93.8 22 136.4 12 250 4 750 30 100 20 150 10 300 3 1000
Hasta aqu hemos tratado los valores que han de permanecer constantes necesariamente, como son la frecuencia y, por consiguiente, la velocidad, ante los inevitables y constantes cambios de carga o potencia solicitados al grupo-
Ahora bien, recordando la expresin de la potencia de una turbina, en CV, tenemos:
de donde deducimos que el nico factor con amplias posibilidades de ser modificado, en funcin de la potencia solicitada es el caudal Q que llega al rodete, ya que los dems valores de la ecuacin son prcticamente constantes.
Dicha variacin o acomodacin del caudal de agua, que incide sobre el rodete de la turbina, se consigue actuando sobre el distribuidor, bien sobre las vlvulas de aguja en el caso de las turbinas Pelton, las palas directrices de las turbinas Francis y de hlice, o las palas directrices y palas del rodete de las turbinas Kaplan.
-
Pgina 5
En centrales pequeas, es posible regular el caudal de agua de forma manual, siendo el operador de la instalacin quien acciona directamente los dispositivos adecuados que permiten controlar el paso de agua hacia el rodete.
As sucede en el caso de pequeas turbinas Pelton, en las que la posicin de la vlvula de aguja del inyector puede ser modificada, por medio de un volante dispuesto a tal fin. Procedimiento no recomendable por exigir la presencia constante del operador y, adems, por ser una regulacin lenta y poco precisa
Cuando se trata de grandes instalaciones expuestas a variaciones de carga entre lmites muy amplios, el distribuidor es gobernado, controlado y regulado mediante el equipo de regulacin segn las rdenes recibidas de un regulador automtico de velocidad, disponiendo todo el conjunto, para cumplir su misin, de un sistema de aceite a presin, del cual nos ocuparemos oportunamente. Variaciones transitorias de velocidad.
Si las variaciones de carga en un grupo se produjeran siempre gradualmente, es decir, durante perodos de tiempo suficientemente prolongados, permitiendo que la regulacin de velocidad se realizase lentamente. las variaciones de velocidad quedaran dentro de un cierto lmite, determinado por la sensibilidad del regulador.
Ahora bien, como es sabido, las oscilaciones de carga se pueden presentar bruscamente, esto es, durante un tiempo insuficiente para la actuacin lenta de los dispositivos de regulacin, con lo que se producen variaciones transitorias de velocidad.
Dependiendo de una serie de condicionantes, tales como inercia de las masas giratorias, caractersticas del grupo, etc., se puede llegar a recuperar, o no, el nmero normal de revoluciones. En base a dichas consideraciones, distinguiremos dos conceptos diferentes, ntimamente relacionados con el estudio de las turbinas hidrulicas, stos son:
Mxima variacin transitoria de velocidad.
Corresponde a la sobrevelocidad mxima alcanzada por el rodete, como consecuencia de producirse una desconexin brusca del grupo respecto de la red, siempre y cuando, el distribuidor, responda adecuadamente a la orden de cierre dada por el regulador y, los elementos que cierran el paso de agua hacia la turbina, funcionen correctamente, vlvulas, compuerta de toma, etc.
Depende del regulador de velocidad y de las caractersticas de la propia instalacin.
-
Pgina 6
Ley de cierre.
El mximo aumento transitorio admitido, oscila entre el 25 y el 50 % sobre el valor de la velocidad nominal.
Velocidad de embalamiento.
O velocidad de fuga, es la mxima velocidad adquirida por el eje del grupo, cuando, al pasar rpidamente de plena carga a valor cero (en vaco), el distribuidor permanece completamente abierto (caudal mximo), por fallo en la regulacin; no funcionando, adems, los elementos que cortan el paso de agua a la turbina. Representa el caso ms desfavorable que se puede producir.
Depende de las caractersticas de la instalacin y, particularmente, del tipo de turbina. Se pueden llegar a alcanzar las velocidades indicadas en la Tabla
TABLA 2-VELOCIDADES DE EMBALAMIENTO EN LOS DISTINTOS TIPOS DE TURBINAS.
Turbinas Exceso de velocidad en % de la nominal Pelton 80-90 Francis 85-120 Hlice 100-180 KapIan 100-180
Algunos grupos de eje horizontal, llevan instalado un volante de inercia, para limitar la sobre velocidad que se puede originar al desacoplarse, bruscamente, el generador de la red. Igualmente, favorece la uniformidad de giro, especialmente en grupos aislados no acoplados al sistema general, compensando los esfuerzos motores y resistentes, evitando fluctuaciones de la
Reguladores automticos de velocidad.
No hemos de confundir estos dispositivos con los reguladores de tensin de los alternadores, pues si bien actan al unsono sobre el grupo, como elementos reguladores que son, sus funciones, aunque relacionadas, estn perfectamente delimitadas.
-
Pgina 7
Segn lo manifestado hasta el momento, deducimos que todo regulador de velocidad es el mecanismo, de distinta ndole, destinado a conseguir, en cualquier circunstancia, el equilibrio de los trabajos motor y resistente presentes en una turbina, manteniendo, sensiblemente constante, la velocidad de sincronismo del grupo ante todas las cargas solicitadas, protegindole, adems, contra velocidades excesivas que pudieran surgir.
Como dato significativo diremos que si dispusisemos de un motor Diesel sobre el cual no actuase ningn regulador de velocidad, se fragmentara en pedazos, en el instante que quedase bruscamente sin carga.
Es elevado el nmero de las distintas marcas y tipos de reguladores automticos instalados en las centrales hidrulicas, por destacadas casas constructoras, especializadas en la fabricacin y montaje de los mismos.
Estimamos que hacer un estudio detallado de cada uno de ellos sera una labor ardua por nuestra parte, y tediosa para el lector, al tener que seguir un texto con exhaustivas explicaciones descriptivas de los distintos elementos, componentes y los interminables, e inevitables, prrafos sobre el modo de operar de los mismos.
Por ello recomendamos a las personas interesadas en el tema que una vez estudiado lo que aqu se expone, se informen y documenten en la central correspondiente, sobre el tipo de regulador que se encuentra instalado en la misma, y realicen el estudio oportuno siguiendo los planos descriptivos y las normas al respecto.
Tengamos presente que determinadas industrias, para el funcionamiento de sus complicadas instalaciones, requieren un suministro de energa elctrica con unos valores muy exactos de la frecuencia y de la tensin. Por lo tanto, los reguladores deben de responder a unas exigencias de sensibilidad, estabilidad y seguridad muy precisas.
Es de especial consideracin, el trabajo que se ha de ejercer para cerrar las palas directrices o las palas de rodetes Kaplan superndose, en turbinas modernas de grandes dimensiones, los 150000 kgm.
No podemos ocultar el grado de cierta complejidad que conlleva la constitucin de los modernos reguladores automticos, los cuales se han ido perfeccionando progresivamente a travs del tiempo como resultado de las experiencias y estudios llevados a efecto ante los avances y exigencias tecnolgicas desde que fue ideado el primer regulador por James Watt en el siglo XVIII
Clasificacin de los reguladores de velocidad.
Una clasificacin, relativamente extensa, se puede establecer de los reguladores de velocidad en funcin de las caractersticas de sus componentes, manera de operar, etc. La resumiremos a los siguientes aspectos.
-
Pgina 8
Por los componentes fundamentales.
En la actualidad, dos procedimientos distintos se utilizan como medios esenciales, en los que radica el fundamento de los reguladores automticos.
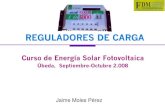
El primero, y ms generalizado, se basa en el desplazamiento o elevacin, por efecto de la fuerza centrfuga, de masas giratorias denominadas pndulos del regulador .
Diversos tipos de dispositivos tacomtricos para reguladores centrfugos.
-
Pgina 9
El segundo se fundamenta en la medida directa y exacta de valores de frecuencia, por medio de dispositivos de alta sensibilidad, destinados a tal fin.
Ambos constituyen, aisladamente, el dispositivo tacomtrico del regulador, conocido tambin como cabezal de regulacin, empleado en detectar el valor del nmero de revoluciones que tiende a dar la turbina en cada momento y, consecuentemente, a actuar sobre una serie de mecanismos como palancas, balancines, vlvulas, etc., con el objeto de, a su vez, mantener la velocidad nominal del grupo, despus de que las seales de regulacin, convenientemente amplificadas y emitidas por dichos mecanismos los cuales en su conjunto forman el propio regulador, son recogidas y obedecidas bien por el equipo de regulacin que gobierna al distribuidor de la turbina, o directamente por este ltimo.
Por lo expuesto podemos establecer una primera clasificacin en los trminos siguientes:
- Reguladores centrfugos.
- Reguladores elctricos.
Por la forma de actuar:
- Reguladores de accin directa.
- Reguladores de accin indirecta.
La diferencia entre ambos, basados en los procedimientos mencionados anteriormente estriba en que la seal de regulacin, emitida por el tacmetro, pase directamente del regulador al distribuidor de la turbina, reguladores de accin directa; o que dicha seal sea transmitida por medio del equipo de regulacin, servomotores, caso del regulador de accin indirecta.
Estos ltimos son los ms utilizados, dada la envergadura y potencia de las turbinas actuales, necesitndose unos elementos auxiliares de regulacin, capaces de desarrollar los elevados esfuerzos que se requieren para conseguir que las palas directrices del distribuidor, etc., respondan rpidamente a las seales de regulacin, adoptando las posiciones adecuadas, en razn al mayor o menor caudal de agua que deba de incidir sobre los labes del rodete.
Los reguladores de accin directa, apenas se utilizan hoy da, salvo en instalaciones de escasa potencia por influir, sobre los mismos, efectos perjudiciales de pendulacin, como consecuencia de intervenir tacmetros de grandes dimensiones, con masas giratorias de mucho peso, lo que origina un funcionamiento inestable y falto de precisin, por la dificultad en establecer un grado de insensibiIidad adecuado.
Para subsanar dichos inconvenientes, se recurre a un amortiguador hidrulico (dashpot), al objeto de que el regulador acte ms pausadamente, ante la presencia
-
Pgina 10
de variaciones rpidas del trabajo resistente que influye en la turbina. Tal amortiguador tambin se dispone en los reguladores de accin indirecta, cuyo dispositivo tacomtrico es de dimensiones y masas considerablemente reducidas, en comparacin con las del regulador de accin directa.
Oportunamente hablaremos del modo de actuar de un amortiguador.
Accionamiento de los reguladores de velocidad.
Al regulador, y concretamente a su dispositivo tacomtrico, se transmite continuamente la velocidad del grupo, al objeto de que detecte las variaciones que puedan surgir en cada instante. En definitiva, entre el grupo y el regulador, existe una conexin que acciona al tacmetro, de forma mas o menos directa.
En el caso de reguladores centrfugos, la conexin se puede llevar a efecto mediante
Transmisin por correa.
Una correa transmite el giro del eje del grupo al eje del tacmetro.
Se utiliza cuando se trata de mquinas de pequea potencia. No es recomendable su empleo en grupos de mediana y gran potencia, debido a la inseguridad de funcionamiento (elasticidad incontrolada, rotura, etc.), y a la falta de precisin del regulador.
Transmisin mecnica rgida.
Se consigue por engranajes, transmisiones cardans, etc.
Presenta el inconveniente de que las oscilaciones que se producen en el eje del grupo se comunican instantneamente al tacmetro, haciendo que este tenga un funcionamiento brusco e irregular, lo que repercute en la fiabilidad de la regulacin.
Transmisin elctrica.
Es el sistema ms utilizado actualmente, por su seguridad de funcionamiento y uniformidad de respuesta.
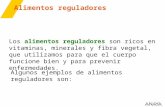
El dispositivo de masas giratorias , es movido por un pequeo motor elctrico, alimentado directamente por una conduccin elctrica tomada del propio alternador (mediante transformacin previa); de la excitatriz principal (cuando es individual para el grupo); o proveniente de un generador auxiliar acoplado al eje del grupo, conocido como generador de imanes permanentes o alternador piloto siendo esta ltima solucin la ms habitual Fig 2
-
Pgina 11
Fig. 2 Alimentacin del motor elctrico de regulador mediante un generador de imanes permanentes.
Fig. 3 Regulador elctrico Brown-Boveri para turbinas hidrulicas.
-
Pgina 12
En estos casos, motor elctrico que acciona al tacmetro. es casi siempre de tipo asncrono de pequeo deslizamiento, con el fin de evitar oscilaciones perjudiciales al regulador.
Para los reguladores elctricos, en los que el dispositivo tacomtrico est constituido por equipos
de medida directa de la frecuencia, stos reciben, los valores de dicha frecuencia, de un generador de imanes permanentes, en la mayora de los casos. La velocidad de funcionamiento normal, est representada por una magnitud proporcional a un valor predeterminado de la frecuencia del generador de imanes (Fig. 3).
Hemos de considerar los modernos reguladores de velocidad constituidos por equipos electrnicos, con los que se consigue una regulacin mucho ms rpida y exacta, a la vez que sus dimensiones son ms reducidas. La transmisin del nmero de revoluciones del eje hacia el regulador, se logra mediante un circuito conectado al denominado generador de impulsos (pick-up), componente electromagntico, instalado en una determinada zona del eje del grupo adecuada a las caractersticas del mismo, que capta y transfiere, al componente electrnico que hace las veces de tacmetro del regulador, las revoluciones del grupo en cada instante, en forma de impulsos de corriente.
Tecnologas mas avanzadas, permiten prescindir del generador de impulsos, al detectar la velocidad mediante valores de tensin, traducidos a valores de frecuencia, tomados de los transformadores de tensin de los circuitos de proteccin o medida del generador. Estando este desexcitado, es suficiente el pequesimo valor de tensin (0,5 V. o menor) originado por el magnetismo remanente.
Observamos que, la aplicacin de la electrnica, da origen a los reguladores electrnicos, concepto que ampla la clasificacin expuesta inicialmente.
-
Pgina 13
Regulacin asttica.
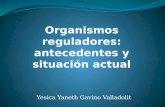
Sea un regulador centrfugo de accin indirecta que acta sobre un servomotor, el cual, a su vez, gobierna al anillo de distribucin de la turbina (Fig. 4).
Fig.4 Regulador asttico.
-
Pgina 14
Fig.5 Actuacin del regulador asttico al disminuir la carga.
Fig. 6 Caracterstica asttica de la frecuencia o r.p.m. en funcin de la potencia.
-
Pgina 15
Los mbolos de la vlvula distribuidora, movidos desde el punto b de la palanca toman una posicin tal, que el aceite tiene camino abierto hacia el lado derecho del servomotor (segn disposicin de la figura), el cual acciona al anillo de distribucin en el sentido de cerrar En los reguladores actuales, el mando de la vlvula distribuidora se realiza por medio de una vlvula piloto, constituida por un mbolo diferencial u otro dispositivo anlogo, que permite reducir los esfuerzos requeridos a la palanca de maniobra y al mismo tiempo aumentar la sensibilidad del regulador.
Una vez que el paso de agua ha disminuido, la velocidad de la turbina tiende a aminorarse y el tacmetro responde al nuevo nmero de revoluciones, reduciendo tambin su velocidad, con lo que los pndulos y los puntos a y b de la palanca descienden, situndose los mbolos de la vlvula distribuidora en la posicin de origen. No obstante, esta situacin no se logra de forma instantnea, por producirse una serie de oscilaciones, por efecto de la inercia que lleva el collar del tacmetro en los desplazamientos sobre su eje, debido a la propia inercia de las masas giratorias.
Se deduce que existe una sola posicin del punto a para asegurar la situacin media de los mbolos de la vlvula distribuidora. Nos encontramos ante un regulador que MANTIENE CONSTANTE EL NUMERO DE REVOLUCIONES del grupo, SEA CUAL SEA EL VALOR DE LA CARGA SOLICITADA, caracterstica asttica (Fig. 6).
Tanto las masas giratorias, como la accin del muelle antagonista del tacmetro y los recorridos de los mbolos de la vlvula distribuidora, llamada tambin vlvula principal, estn calculados para regular la velocidad de la turbina al valor requerido. Una bomba, generalmente de tipo rotativo, enva aceite al circuito, sometido de forma constante a una determinada presin.
Centrmonos en los sucesivos esquemas elementales mostrados, e intentemos hacer una abstraccin total en el anlisis de los mismos. Partimos de una situacin inicial de funcionamiento normal, en la que el conjunto se encuentra tal y como indica la figura 4.
Consideremos, como principal referencia, la horizontalidad de la palanca abc, sobre cuyo extremo fijo c esta se apoya y puede girar hacia arriba o hacia abajo, segn actuacin del tacmetro, al que, por medio de un collar deslizante sobre su eje por la accin de las masas giratorias, se une la palanca en su extremo a, mediante una conexin adaptable y con libertad de movimiento sobre este punto. La conexin del vstago de la vlvula distribuidora sobre la palanca, en el punto b, tambin es deslizante.
Caso de disminuir la carga, la turbina tender a aumentar su velocidad, lo cual ser detectado por el tacmetro, cuyo eje girar ms rpido. elevndose los pndulos y el collar solidario a los mismos, debido a la fuerza centrifuga desarrollada, y por consiguiente, el extremo a de la palanca
-
Pgina 16
Los reguladores que se basan en tal condicin, reciben el nombre de reguladores astticos, conocidos tambin como isdromos (igual recorrido), los cuales caracterizan la regulacin asttica o isodrmica.
Los reguladores astticos, no son utilizados normalmente, ya que cuando se trata de repartir cargas, entre dos o ms grupos, la reparticin se hace de manera indeterminada, corrindose el riesgo de que un grupo se haga con toda la carga y los otros queden sin ella, por la dificultad que existe en que los reguladores vayan perfectamente de acuerdo. Adems, un regulador asttico, tiene tendencia a oscilar en caso de variaciones repentinas de carga, de tal modo que se originaran continuamente sobrerregulaciones y subregulaciones.
Regulacin asttica.
Para hacer posible el trabajo en comn de varias mquinas, debe de evitarse la indeterminacin que presenta el regulador asttico, en el que a un numero de revoluciones por minuto dado corresponden tantos valores de potencia como se desee, dentro de los lmites del grupo.
Debe conseguirse que a cada valor de potencia, le corresponda la adecuada velocidad o frecuencia respectiva.
Esta condicin viene realizada por una caracterstica ligeramente descendente, la cual recibe el nombre de caracterstica esttica. Se representa por una curva, prcticamente una lnea recta, que indica la ley de dependencia entre la velocidad del grupo y la potencia, de tal modo que se aprecia cmo la frecuencia o el numero de revoluciones por minuto descienden al aumentar la potencia suministrada (Fig. 7).
Fig. 7 Caracterstica esttica de la frecuencia o r.p.m. en funcin de la potencia.
-
Pgina 17
La caracterstica mencionada, da origen e identifica a los reguladores estticos, que proporcionan una regulacin esttica, tambin denominada regulacin en descenso.
De manera grfica muy sencilla, analizaremos el funcionamiento de un regulador esttico. Sigamos elesquema representado en la Fig. 8, cuya nica diferencia respecto del regulador asttico, radica en que enel caso presente tenemos un nuevo dispositivo, compuesto por la barra cd y la cua AA', esta ltima,solidaria al vstago del servomotor, segn la orientacin indicada (conforme disposicin de la figura), la cualsigue sus movimientos, con lo que el punto de giro c, de la palanca abc, ya no es fijo, dependiendo suposicin de la que adopte el mbolo del servomotor, como consecuencia del desplazamiento ascendente odescendente del extremo d de la barra cd, sobre la cua AA, segn se abra o cierre respectivamente eldistribuidor.
Fig. 8 - Regulador ESTTICO.
A distintas posiciones de c, corresponden distintas posiciones de a, siempre y cuando los mbolos de la vlvula distribuidora se siten en el punto medio despus de cada actuacin.
-
Pgina 18
Haciendo comparacin con el regulador asttico, ahora las posiciones del extremo a son ms bajas a medida que se abre el distribuidor, de donde se deduce, que la velocidad del tacmetro depender de la carga, y consecuentemente la velocidad del grupo, de tal modo que a mayores cargas correspondern velocidades menores.
Pero, sin embargo, quede bien claro que lo que ha de cumplirse en todo instante, es que se mantenga constante el valor de la frecuencia, 50 p.p.s., o lo que es lo mismo, el numero de revoluciones por minuto cualquiera sea el valor de la carga.
Para ello, el regulador esttico, dispone de un control de velocidad, del que hablaremos en el apartado 9.6. destinado a desplazar, realmente, hacia arriba o hacia abajo la caracterstica, paralelamente a s misma, a medida que, respectivamente, sube o baja la potencia. As, entre los valores de marcha en vaco y plena carga, la caracterstica siempre tendr, con la lnea que marca la frecuencia constante de 50 p.p.s., un puntode interseccin perteneciente a cada valor de las sucesivas cargas intermedias (Fig. 9).
Fig. 9 Desplazamiento ascendente de la caracterstica esttica, medida que sube la potencia solicitada al grupo.
Con el fin de conseguir la estabilizacin o amortiguacin de oscilaciones en el proceso de la regulacin, se emplea un amortiguador hidrulico, denominado freno de catarata (Fig. 10).
-
Pgina 19
.
Fig. 10 - Regulador con dispositivo de amortiguacin o estatismo transitorio.
Observamos que en la barra cd, se ha insertado un amortiguador cuyo mbolo tiene la propiedad de variar la longitud de la misma, segn se transvase el aceite a un lado o a otro de dicho embolo, a travs de la vlvula conmutadora T, como consecuencia de la accin antagonista, positiva o negativa, que sobre ste ejerce el muelle que acta en el punto c. Por estas razones, a la barra cd tambin se la nombra biela elstica.
La vlvula T presenta una cierta resistencia, que se grada previamente, segn caractersticas de funcionamiento del regulador, por lo que no se abre hasta que las condiciones de desequilibrio del muelle antagonista son las fijadas, momento en el cual da paso de aceite.
Por lo tanto, ante una variacin de carga, el punto c adoptara una posicin en consonancia con la que tome la cua AA, comportndose todo el conjunto cd, al comienzo, como un elemento rgido. Durante un breve espacio de tiempo, el regulador opera de conformidad con el principio de regulacin puramente esttica, con un estatismo muy elevado dependiente de la inclinacin de la cua AA, hasta
-
Pgina 20
que, debido a la accin del muelle antagonista y de la vlvula T, el embolo del amortiguador se site en la posicin adecuada, acortando la barra cd si la velocidad tiende a descender por existir un aumento de potencia, o alargndola en el caso contrario, todo ello hasta que el muelle recobra su posicin de equilibrio, instante en que, el punto c, retorna a su posicin inicial.
De esta forma, en cada variacin de carga, se consigue un elevado grado de estatismo al comenzar la regulacin, etapa denominada de estatismo transitorio, que se anula cuando termina la regulacin, momento en que el regulador se comporta como un regulador asttico
Sistema De Control Descripcin General del Sistema De Control Consiste en un conjunto de sub sistemas que deben trabajar de forma coordinada. Estos sub sistemas se encuentran distribuidos fsicamente en las instalaciones . La responsabilidad del sistema es el control y monitoreo de estos sub sistemas y proporcionar una interfaz de usuario homognea. La arquitectura fsica del sistema de control consistir en una serie de computadoras, equipos electrnicos, sensores y actuadores interconectados . Estos elementos sern responsables del control directo de los diferentes sub sistemas del GTC. El sistema de control ser responsable de otras tareas Planificacin. de observaciones, archivo de datos, anlisis de la calidad de los datos para lo cual existir un nmero de estaciones de trabajo conectadas a travs de una o ms redes de rea local, las cuales proveern acceso a un grupo de servicios centralizados Una arquitectura de software abierta, flexible, distribuida y orientada a objetos ser utilizada con el objeto de proveer acceso independiente de la localizacin a los diferentes servicios distribuidos. Adems, estos servicios son requeridos para garantizar un nivel de calidad total de servicio. La implementacin de esta arquitectura ser simplificada mediante el uso de middleware distribuido.
-
Pgina 21
Este middleware asegurar mediante una poltica de planificacin correcta, que todas las tareas tendrn los recursos necesarios. Suministrar un esqueleto "plug&play" donde los diferentes componentes del software de control sern conectados. Esta arquitectura suministrar un entorno homogneo tal, que el tiempo y costos de desarrollo de los diferentes componentes ser reducido. 1. Arquitectura del Software La arquitectura del sistema de control consistir en un conjunto altamente integrado de sistemas distribuidos por medio de redes en una organizacin jerrquica. Esta jerarqua ser organizada siguiendo el modelo cliente servidor. El sistema de control operar en tiempo real (quasi-real time), con una jerarqua de niveles de control y comunicaciones entre procesos. Habr un gran nmero de puntos de control y por lo tanto, de procesos para controlarlos. Los planes actuales cumplen varios procesos front-end, procesos, estaciones de trabajo y servidores 2. Arquitectura del Hardware La arquitectura del hardware del sistema de control ser totalmente distribuida. Consistirn en nodos VME llamados unidades de control locales (LCU) con capacidad de proceso en tiempo real conectados directamente a dispositivos fsicos del GTC. Estas conexiones sern capaces de usar un conjunto variado de buses de control (ej., CAN bus, GPIB, Bitbus). Otros nodos de alto nivel llevarn a cabo funciones de coordinacin y ofrecern servicios crticos al resto de los nodos (ej., envo de eventos, logging, monitorizacin, planificacin). Ambas, LCU y las unidades de coordinacin, sern conectadas por medio de uno o ms ATM nodos, para formar la llamada red de control. Esta arquitectura permitir una configuracin dinmica del trfico del tal forma que cada nodo tendr un ancho de banda adecuado a sus necesidades. En las circunstancias en las que el ancho de banda es muy grande, sern usados otros interfaces como SCI o Fiber Channel, Sin embargo, cuando el ancho de banda no sea problema, se podran usar interfaces ms baratos como Ethernet o Fast-Ethernet.
-
Pgina 22
Definicin de sistema SCADA. SCADA es el acrnimo de Supervisory Control And Data Acquisition Supervisin, Control y adquisicin de Datos Un SCADA es un sistema basado en computadoras que permite supervisar y controlar a distancia una instalacin de cualquier tipo. A diferencia de los Sistemas de Control distribuido, el lazo de control es GENERALMENTE cerrado por el operador. Los Sistemas de Control Distribuido se caracterizan por realizar las acciones de control en forma automtica. Hoy en da es fcil hallar un sistema SCADA realizando labores de control automtico en cualquiera de sus niveles, aunque su labor principal sea de supervisin y control por parte del operador. En la tabla No. 1 se muestra un cuadro comparativo de las principales caractersticas de los sistemas SCADA y los sistemas de Control Distribudo (DCS) (ESTAS Caractersticas no son limitantes para uno u otro tipo de sistemas, son tpicas). Tabla no. 1: algunas diferencias tpicas entre sistemas SCADA y DCS. ASPECTO SCADA DCS TIPO DE ARQUITECTURA
CENTRALIZADA DISTRIBUDA
TIPO DE CONTROLPREDOMINANTE
SUPERVISORIO: Lazos decontrol cerrados por eloperador. Adicionalmente: controlsecuencial y regulatorio.
REGULATORIO: Lazos decontrol cerradosautomticamente por elsistema. Adicionalmente:control secuencial, batch, algorismos avanzados, etc.
TIPOS DE VARIABLES DESACOPLADAS ACOPLADAS
REA DE ACCIN reas geogrficamentedistribuidas.
rea de la planta.
UNIDADES deADQUISICIN DE DATOSY CONTROL
Remotas, PLCs. Controladores de lazo, PLCs.
-
Pgina 23
MEDIOS DECOMUNICACIN
Radio, satlite, lneastelefnicas, conexindirecta, LAN, WAN.
Redes de rea local, conexindirecta.
BASE DE DATOS CENTRALIZADA DISTRIBUDA El flujo de la informacin en los sistemas SCADA es como se describe a continuacin: El FENMENO FSICO lo constituye la variable que deseamos medir. Dependiendo del proceso, la naturaleza del fenmeno es muy diversa: presin, temperatura, flujo, potencia, intensidad de corriente, voltaje, ph, densidad, , etc. Este fenmeno debe traducirse a una variable que sea inteligible para el sistema SCADA, es decir, en una variable elctrica. Para ello, se utilizan los SENSORES o TRANSDUCTORES. Los SENSORES o TRANSDUCTORES convierten las variaciones del fenmeno fsico en variaciones proporcionales de una variable elctrica. Las variables elctricas ms utilizadas son: voltaje, corriente, carga, resistencia o capacitancia. Sin embargo, esta variedad de tipos de seales elctricas debe ser procesada para ser entendida por el computador digital. Para ello se utilizan ACONDICIONADORES DE SEAL, cuya funcin es la de referenciar estos cambios elctricos a una misma escala de corriente o voltaje. Adems, provee aislacin elctrica y filtraje de la seal con el objeto de proteger el sistema de transientes y ruidos originados en el campo. Una vez acondicionada la seal, la misma se convierte en un valor digital equivalente en el bloque de CONVERSIN DE DATOS. Generalmente, esta funcin es llevada a cabo por un circuito de conversin analgico/digital. El computador almacena esta informacin, la cual es utilizada para su ANLISIS y para la TOMA DE DECISIONES. Simultneamente, se MUESTRA LA INFORMACIN al usuario del sistema, en tiempo real. Basado en la informacin, el operador puede TOMAR LA DECISIN de realizar una accin de control sobre el proceso. El operador comanda al computador a realizarla, y de nuevo debe convertirse la informacin digital a una seal elctrica. Esta seal elctrica es procesada por una SALIDA DE CONTROL, el cual funciona como un acondicionador de seal, la cual la escala para manejar un dispositivo dado: bobina de un rel, setpoint de un controlador, etc.
-
Pgina 24
Necesidad de un sistema SCADA. Para evaluar si un sistema SCADA es necesario para manejar una instalacin dada, el proceso a controlar debe cumplir las siguientes caractersticas: a) El nmero de variables del proceso que se necesita monitorear es alto.
b) El proceso est geogrficamente distribuido. Esta condicin no es limitativa, ya que puede
instalarse un SCADA para la supervisin y control de un proceso concentrado en una localidad
c) Las informacin del proceso se necesita en el momento en que los cambios se producen en el mismo, o en otras palabras, la informacin se requiere en tiempo real.
d) La necesidad de optimizar y facilitar las operaciones de la planta, as como la toma de decisiones, tanto gerenciales como operativas.
e) Los beneficios obtenidos en el proceso justifican la inversin en un sistema
SCADA. Estos beneficios pueden reflejarse como aumento de la efectividad de la produccin , los niveles de seguridad etc. f) La complejidad y velocidad del proceso permiten que la mayora de las acciones de control sean iniciadas por un operador. En caso contrario, se requerir de un Sistema de Control Automtico, el cual lo puede constituir un Sistema de Control Distribuido, PLC's, Controladores a Lazo Cerrado o una combinacin de ellos. Funciones. Dentro de las funciones bsicas realizadas por un sistema SCADA estn las siguientes: a) Recabar, almacenar y mostrar informacin, en forma continua y confiable,
correspondiente a la sealizacin de campo: estados de dispositivos, mediciones, alarmas, etc.
b) Ejecutar acciones de control iniciadas por el operador, tales como: abrir o cerrar,
vlvulas, arrancar o parar bombas, etc. c) Alertar al operador de cambios detectados en la planta, tanto aquellos que no se
consideren normales (alarmas) como cambios que se produzcan en la operacin diaria de la planta (eventos). Estos cambios son almacenados en el sistema para su posterior anlisis.
d) Aplicaciones en general, basadas en la informacin obtenida por el sistema, tales como: reportes, grficos, de tendencia, historia de variables, clculos, predicciones,
-
Pgina 25
deteccin de fugas, etc.
El sistema de control de la central suele constar de una combinacin de: sistema de control distribuido (DCS), controladores lgicos programables (PLC) y lgica de rels. Una interfase con el operador:
Sistema de Informacin
INDICE: Introduccin: Un sistema d e informacin es un conjunto de elementos que interactan entre s con el fin de apoyar las actividades de una empresa. El equipo computacional: el hardware necesario para que el sistema de informacin pueda operar. El recurso humano que interacta con el Sistema de informacin, el cual est formado por las personas que utilizan el sistema. Un sistema de informacin realiza cuatro actividades bsicas: Entrada, almacenamiento, procesamiento y salida de informacin. Entrada de Informacin: Es el proceso mediante el cual el Sistema de Informacin toma los datos que requiere para procesar la informacin. Las entradas pueden ser manuales o automticas. Las manuales son aquellas que se proporcionan en forma directa por el usuario, mientras que las automticas son datos o informacin que provienen o son tomados de otros sistemas o mdulos. Esto ltimo se denomina interfaces automticas. Las unidades tpicas de entrada de datos a las computadoras son las terminales, las cintas magnticas, las unidades de diskette, los cdigos de barras, los escner, la voz, los monitores sensibles al tacto, el teclado y el Mouse, entre otras. Almacenamiento de informacin: El almacenamiento es una de las actividades o capacidades ms importantes que tiene una computadora, ya que a travs de esta propiedad el sistema puede recordar
-
Pgina 26
la informacin guardada en la seccin o proceso anterior. Esta informacin suele ser almacenada en estructuras de informacin denominadas archivos. La unidad tpica de almacenamiento son los discos magnticos o discos duros, los discos flexibles o diskettes y los discos compactos CD ROM. Procesamiento de Informacin: Es la capacidad del Sistema de Informacin para efectuar clculos de acuerdo con una secuencia de operaciones preestablecida. Estos clculos pueden efectuarse con datos introducidos recientemente en el sistema o bien con datos que estn almacenados. Esta caracterstica de los sistemas permite la transformacin de datos fuente en informacin que puede ser utilizada para la toma de decisiones, lo que hace posible, entre otras cosas, que un tomador de decisiones genere una proyeccin financiera a partir de los datos que contiene un estado de resultado. Salida de Informacin: La salida es la capacidad de un Sistema de Informacin para sacar la informacin procesada o bien datos de entrada al exterior. Las unidades tpicas de salida son las impresoras, , terminales, diskettes, cintas magnticas, la voz, los graficadores y los plotters, entre otros. Es importante aclarar que la salida de un Sistema de Informacin puede constituir la entrada a otro Sistema de Informacin o mdulo. En este caso, tambin existe una interfase automtica de salida. Por ejemplo, el Sistema de control de actividad tiene una interfase automtica de salida con el Sistema de datos, ya que genera los movimientos programados. A continuacin se muestran las diferentes actividades que puede realizar un Sistema de Informacin de control: Actividades que realiza un Sistema de Informacin: Entradas:
Datos generales instrucciones (interfase automtico). , depuraciones, etc.
-
Pgina 27
Proceso:
Clculo de ajustes. Clculo de actividad . Clculo de resultado
Almacenamiento:
Movimientos)
Salidas:
Reportes . Estados. (interfase automtica) Consultas en pantalla de una terminal.