Resultantes de sistema de fuerzas de HIBBELER
15
RESULTANTES DE SISTEMAS DE FUERZAS 1. MOMENTO DE UNA FUERZA, FORMULACION ESCALAR Cuando una fuerza se aplica a un cuerpo esta producirá una tendencia a que el cuerpo gire alrededor de un punto que no eta en la línea de acción de la fuerza. Esta tendencia a girar se conoce en ocasiones como par de tensión, pero con mayor frecuencia se denomina el momento de una fuerza o simplemente el momento. Por ejemplo, considere una llave de torsión que se usa para desenroscar un perno. si se aplica una fuerza al manera de la llave esta tendera a girar el perno alrededor del punto O(o el eje z). La magnitud del momento es directamente proporcional a la magnitud de F y la distancia perpendicular o brazo del momento d. cuando más grande sea la fuerza o más grande sea el brazo del momento, mayor será el momento o el efecto de giro. Observe que si se aplica la fuerza F a un Angulo Θ= 90º. Entonces será más difícil girar el perno puesto que el brazo momento d = d senΘ será menor que d. si se aplica F a lo largo de la llave. Su brazo de momento será igual a cero puestos que la línea de acción de F interceptará el punto O (el eje z). En consecuencia, el momento de F respecto de O también es cero y no puede ocurrir el giro. Ahora podemos generacizar el analisis anterior y considerar la fuerza F y el punto O que se encuntra en un plano el momento Mo con respecto al punto O o con respecto a un eje que pase por O y sea perpendicular al plano es una cantidad vectorial puesto que tienen magnitud y dirección específicas.
-
Upload
douglas-fernandez -
Category
Education
-
view
1.155 -
download
0
Transcript of Resultantes de sistema de fuerzas de HIBBELER

RESULTANTES DE SISTEMAS DE FUERZAS
1. MOMENTO DE UNA FUERZA, FORMULACION ESCALAR
Cuando una fuerza se aplica a un cuerpo esta producirá una tendencia a que el
cuerpo gire alrededor de un punto que no eta en la línea de acción de la fuerza.
Esta tendencia a girar se conoce en ocasiones como par de tensión, pero con
mayor frecuencia se denomina el momento de una fuerza o simplemente el
momento. Por ejemplo, considere una llave de torsión que se usa para
desenroscar un perno. si se aplica una fuerza al manera de la llave esta tendera a
girar el perno alrededor del punto O(o el eje z). La magnitud del momento es
directamente proporcional a la magnitud de F y la distancia perpendicular o brazo
del momento d. cuando más grande sea la fuerza o más grande sea el brazo del
momento, mayor será el momento o el efecto de giro. Observe que si se aplica la
fuerza F a un Angulo Θ= 90º. Entonces será más difícil girar el perno puesto que
el brazo momento d = d senΘ será menor que d. si se aplica F a lo largo de la
llave. Su brazo de momento será igual a cero puestos que la línea de acción de F
interceptará el punto O (el eje z). En consecuencia, el momento de F respecto de
O también es cero y no puede ocurrir el giro.
Ahora podemos generacizar el analisis anterior y considerar la fuerza F y el punto
O que se encuntra en un plano el momento Mo con respecto al punto O o con
respecto a un eje que pase por O y sea perpendicular al plano es una cantidad
vectorial puesto que tienen magnitud y dirección específicas.

Magnitud.- La magnitud de M0 es:
…………………. (1)
Dónde:
D: es el brazo de momento o distancia perpendicular donde el eje en el punto O
hasta la línea de acción de la fuerza.
Las unidades de la magnitud del momento son el producto de la fuerza
multiplicada por la distancia, es decir: N*m o lb*pie.
Dirección la dirección de M0 está definida por su eje de momento, el cual es
perpendicular al plano que contiene la fuerza F, y por su brazo de momento d.
para establecer el sentido de dirección de M0 se utilizara la regla de la mano
derecha. De acuerdo con esta regla el curveo natural de los dedos de la mano
derecha cuando estos se doblan sobre la palma representa la tendencia para la
rotación causada por el momento. Cuando se realiza esta acción, el pulgar de la
mano derecha dará el sentido de la dirección de M0 es tres dimensiones, el vector
de momento se ilustra mediante una flecha curva alrededor de una flecha. En dos
dimensiones, este vector se representa solo con la flecha curva como en este
caso el momento tendera a causar una rotación en sentido contrario al de las
manecillas del reloj, el vector de momento se dirige en realidad hacia fuera de la
página.
M0 = Fd

MOMENTO RESULTANTE. Para problemas bidimensionales, donde todas las
fuerzas se encuentran en el plano x y; el momento resultante (MR)0 con respecto al
punto = (el eje z) puede determinarse al encontrar la suma algebraica de los
momentos causados por todas las fuerzas en el sistema. Como convención
consideraremos de manera general los momentos positivos como en sentido
contrario al de las manecillas del reloj por estar dirigidos a lo largo del eje positivo
z (fuera de la pagina). Los momentos en el sentido de las manecillas de reloj serán
negativos. Al hacer esto, el sentido de dirección de cada momento puede
representarse mediante un signo de más o de menos Por lo tanto, si se utiliza esta
convención de signos, el momento resultante seria
(MR)0 = F1d1 – F2d2 + F3d3
Si es el resultado numerico de esta suma es un escalar positivo (MR)0 , sera un
momento en sentido contrario al de las manecillas del reloj y si el resultado es
negativo (MR)0 sera un momento en el sentido de las manecillas del reloj

2. MOMENTO DE UNA FUERZA, FORMULACIÓN VECTORIAL
El momento de una fuerza F con respecto al punto O, o realmente con respecto al
eje del momento que pasa por O y es perpendicular al plano que contiene a O y a
F, puede expresarse por el producto cruz vectorial de la siguiente manera:
𝑴𝑶 = 𝒓 × 𝑭
MAGNITUD
La magnitud del producto cruz se define con la ecuación 4-3 como MO = r F
sen ϴ , donde el ángulo ϴ se mide entre las colas de r y F. Para establecer este
ángulo, se debe tratar a r como un vector deslizante, de manera que ϴ se pueda
construir correctamente. Como el brazo de momento d = r sen ϴ, entonce

DIRECCIÓN
La dirección y el sentido de MO están determinados mediante la regla de la mano
derecha, tal como se aplica ésta al producto cruz. Así, al deslizar r a la posición de
la línea discontinua y cerrar los dedos de la mano derecha de r hacia F, “r cruz F”,
el pulgar está dirigido hacia arriba o perpendicularmente al plano que contiene a r
y a F, esto es, en la misma dirección que MO, el momento de la fuerza respecto al
punto O. Observe que el “curveo” de los dedos como el curveo alrededor del
vector momento, indica el sentido de rotación causado por la fuerza.
PRINCIPIO DE TRANSMISIBILIDAD
A menudo, la operación del producto cruz se usa en tres dimensiones porque no
se requiere la distancia perpendicular o el brazo de momento desde el punto O
hasta la línea de acción de la fuerza. En otras palabras, podemos usar cualquier
vector de posición r medido desde el punto O hasta cualquier punto sobre la línea
de acción de la fuerza F.
Como F se puede aplicar en cualquier punto a lo largo de su línea de acción y aun
así crear el mismo momento con respecto al punto O, entonces F puede
considerarse un vector deslizante. Esta propiedad se llama principio de
transmisibilidad de una fuerza.

FORMULACIÓN VECTORIAL CARTESIANA
Si establecemos ejes coordenados x, y, z, el vector posición r y la fuerza F pueden
expresarse como vectores cartesianos.
Dónde:
rx, ry, rz : Representan las componentes x, y, z del vector de posición trazado
desde el punto O hasta cualquier punto sobre la línea de acción de la fuerza.
Fx, Fy, Fz : Representan las componentes x, y, z del vector fuerza.
Si se desarrolla el determinante tenemos:
MOMENTO RESULTANTE DE UN SISTEMA DE FUERZAS
Si un sistema de fuerzas actúa sobre un cuerpo, el momento
resultante de las fuerzas respecto al punto O puede ser
determinado mediante la adición del momento de cada
fuerza. Esta resultante se puede escribir simbólicamente
como
𝑴𝑹𝑶= ∑(𝒓 × 𝑭)

3. PRINCIPIO DE MOMENTOS
Un concepto que se usa a menudo en mecánica es el principio de momentos, al
cual también se le llama a veces teorema de Varignon puesto que originalmente
lo desarrolló el matemático francés Varignon (1654-1722).
El principio establece que el momento de una fuerza con respecto a un punto
es igual a la suma de los momentos de las componentes de la fuerza con
respecto al punto. Este teorema puede probarse fácilmente por el producto cruz,
puesto que dicho producto obedece la ley distributiva.
Por ejemplo, considere los momentos de la fuerza F y dos de sus componentes
respecto del punto O.
Como F = F1 + F2, tenemos:
Para problemas en dos dimensiones, podemos usar el principio de momentos para
descomponer la fuerza en sus componentes rectangulares y después determinar
el momento con un análisis escalar de la siguiente forma:
Por lo general, este método es más sencillo que determinar el mismo momento
con:
𝑴𝑶 = 𝑭𝒅
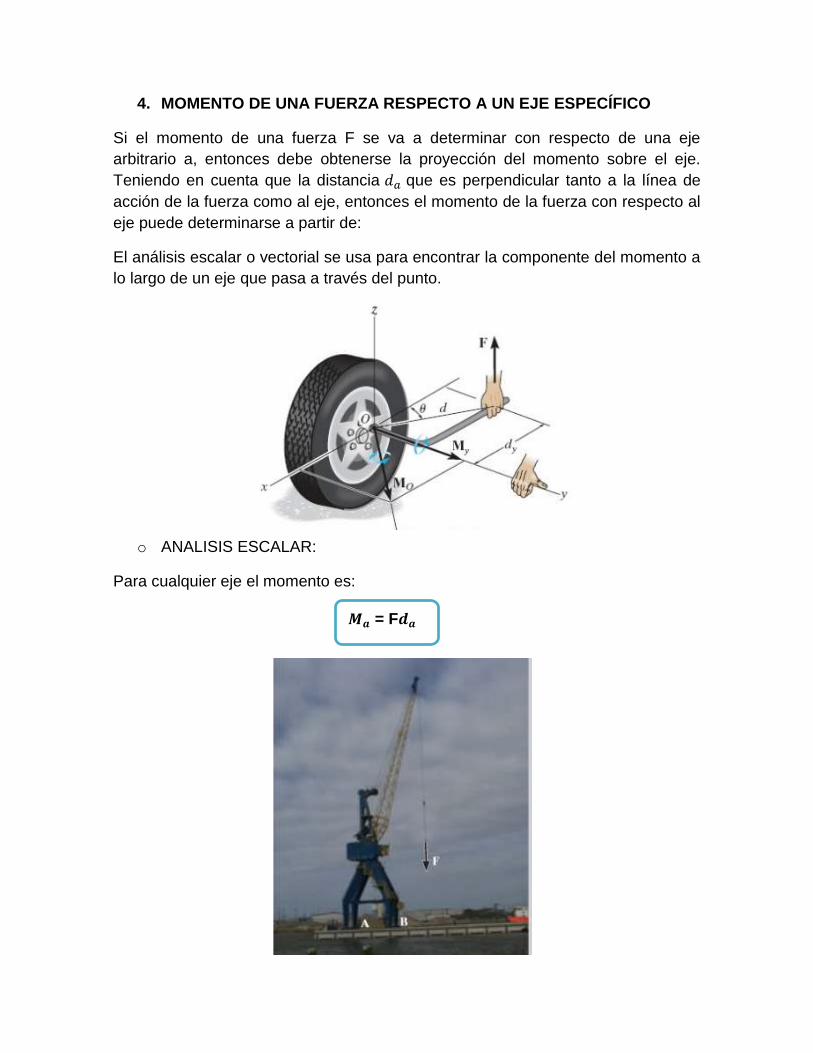
4. MOMENTO DE UNA FUERZA RESPECTO A UN EJE ESPECÍFICO
Si el momento de una fuerza F se va a determinar con respecto de una eje
arbitrario a, entonces debe obtenerse la proyección del momento sobre el eje.
Teniendo en cuenta que la distancia 𝑑𝑎 que es perpendicular tanto a la línea de
acción de la fuerza como al eje, entonces el momento de la fuerza con respecto al
eje puede determinarse a partir de:
El análisis escalar o vectorial se usa para encontrar la componente del momento a
lo largo de un eje que pasa a través del punto.
o ANALISIS ESCALAR:
Para cualquier eje el momento es:
𝑴𝒂 = F𝒅𝒂

La fuerza no contribuye al momento si su línea de acción pasa o es paralela al eje.
Observe que cuando la línea de acción de F intersecta el eje, el momento
de F con respecto al eje es igual a cero. Además cuando la línea de acción
de F es paralela al eje, el momento de F con respecto al eje es igual a cero.
o ANALISIS VECTORIAL:
En tres dimensiones debe usarse el triple producto vectorial.
EJE DE PROYECCION
𝒖𝒂𝒙 𝒖𝒂𝒚 𝒖𝒂𝒛
𝑴𝒂 = 𝒖𝒂 · (r x F) = 𝒓𝒙 𝒓𝒚 𝒓𝒛
𝑭𝒙 𝑭𝒚 𝑭𝒛

Dónde:
𝑢𝑎 : Es el vector unitario que especifica la dirección del eje.
r :Es un vector de posición que está dirigido desde cualquier punto sobre el eje
hacia cualquier punto sobre la línea de acción de fuerza.
𝐹𝑥 𝐹𝑦 𝐹𝑧: Representan las componentes x,y,z del vector fuerza.
Si 𝑀𝑎 se calcula como un escalar negativo, entonces el sentido de
dirección de 𝑀𝑎 es opuesto a 𝑢𝑎.
El momento 𝑀𝑎 expresado como un vector cartesiano se determina a partir
de: 𝑀𝑎 = 𝑀𝑎 𝑢𝑎.
5. MOMENTO DE UN PAR
Un par define como dos fuerzas paralelas que tienen la misma magnitud, con
direcciones opuestas, y están separadas por una distancia perpendicular d.
o FORMULACIÓN ESCALAR:
Dónde:
F: Es la magnitud de una fuerza
d: Es la distancia perpendicular o el brazo de momento entre las fuerzas
Su dirección es estable por medio de la regla de la mano derecha.
M = F d

o FORMULACION VECTORIAL:
Se usa el producto cruz vectorial para determinar el momento par, entonces
r se extiende desde cualquier punto sobre la línea de acción de una de las
fuerzas hacia cualquier punto sobre la línea de acción de la otra fuerza F
que se emplea en el producto cruz.
PARES EQUIVALENTES:
Se dice que dos pares son equivalentes si producen un momento con la
misma magnitud y dirección.
Las fuerzas de pares equivalentes están en el mismo plano o en planos
paralelos.
MOMENTO DE UN PAR RESUELTANTE: Como los momentos de par son
vectores libres, sus resultantes pueden determinarse mediante la suma de
vectores
𝑴𝑹 = 𝑴𝟏 + 𝑴𝟐 …………
Un momento de par resultante es:
𝑴𝑹 = ∑ (r x F)
M = r x F

6. RESULTANTES DE UN SISTEMA DE UNA FUERZA Y UN PAR Cuando un cuerpo rígido está sometido a un sistema de fuerzas y momentos de par, a menudo es más sencillo estudiar los efectos externos sobre el cuerpo reemplazando el sistema por una sola fuerza resultante equivalente actuando en un punto específico O y un momento de par resultante. Para mostrar cómo determinar esas resultantes, consideraremos el cuerpo rígido y usaremos los conceptos analizados en la sección previa. Como el punto O no está sobre la línea de acción de las fuerzas, un efecto equivalente es producido si las fuerzas son desplazadas hacia el punto O y los correspondientes momentos de par son aplicados al cuerpo.
Además, el momento de par 𝑀𝑐 simplemente es desplazado al punto O Por suma vectorial, la fuerza resultante es F R = F 1 + F2, Y el momento de par resultante es 𝑀𝑅0
= 𝑀𝐶 + 𝑀1 + 𝑀2 . Como se mantiene la equivalencia, cada
sistema de fuerza y par ocasionará los mismos efectos externos, es decir, la misma traslación y rotación del cuerpo. Observe que tanto la magnitud como la
dirección de 𝐹𝑅 son independientes de la ubicación del punto O; ya que es un vector libre. Estos resultados sin embargo, 𝑀𝑅0
depende de esta ubicación ya que
los momentos 𝑀1y 𝑀2son determinados usando los vectores de posición también que 𝑀𝑅0
es un vector libre y puede actuar en cualquier punto sobre el cuerpo,
aunque el punto O generalmente es seleccionado como su punto de aplicación. El método anterior, de simplificar cualquier sistema de fuerza y momento de par a una fuerza resultante que actúe en el punto O y un momento de par resultante, puede ser generalizado y representado mediante la aplicación de las dos ecuaciones siguientes.
𝑭𝑹 = 𝚺𝑭 𝑴𝑹𝟎
= 𝚺𝑴𝑪 + 𝚺𝑴𝟎
La primera ecuación establece que la fuerza resultante del sistema es equivalente a la suma de todas las fuerzas; y la segunda ecuación establece que el momento de par resultante del sistema es equivalente a la suma de todos los momentos de
par ∑𝑀𝐶, más los momentos con respecto al punto O de todas las fuerzas ∑Mo. Si el sistema de fuerzas se encuentra en el plano x-y y cualesquiera momentos de par son perpendiculares a este plano, que está a lo largo del eje z, entonces las ecuaciones anteriores se reducen a las siguientes tres ecuaciones escalares.

Si las dos fuerzas que actúan sobre la barra son reemplazadas por una fuerza resultante y un momento de par equivalentes en el punto A, o por la fuerza resultante y un momento de par equivalentes en el punto B, entonces, en cada caso la mano debe proporcionar la misma resistencia a la traslación y la rotación para mantener la barra en la posición horizontal. En otras palabras, los efectos externos sobre la barra son los mismos en cada caso.
7. REDUCCIÓN ADICIONAL DE UN SISTEMA DE UNA FUERZA Y UN PAR
Considérese un sistema de fuerzas F1, F2, F3,... que actúan sobre un cuerpo
rígido en los puntos A1, A2, A3,... definidos por los vectores de posición r1, r2, r3,
etc. (figura 1). F1 puede ser trasladada de A1 a un punto dado O, si se agrega al
sistema original de fuerzas un par de momento M1, igual al momento r1 x F1
de F1 con respecto a O. Si se repite este procedimiento con F2, F3,..., se obtiene
el sistema mostrado en la figura 1.b, que consta de: las fuerzas originales, ahora
actuando en O, y los vectores de par que han sido agregados. Como ahora las
fuerzas son concurrentes, pueden ser sumadas vectorialmente y reemplazadas
por su resultante R. De manera similar, los vectores de par M1, M2, M3,... pueden
sumarse vectorialmente y ser reemplazados por un solo vector de par M𝐑𝟎. Por
tanto, cualquier sistema de fuerzas, sin importar que tan complejo sea, puede ser
reducido a un sistema equivalente fuerza-par que actúa en un punto
dado O (figura 1. c). Se debe observar que mientras cada uno de los vectores de
par M1, M2, M3,..., en la figura 1.b es perpendicular a la fuerza que le
corresponde, en general la fuerza resultante R y el vector de par
resultante M𝐑𝟎 en la figura 1.c no serán perpendiculares entre sí.

8. REDUCCIÓN DE UNA CARGA SIMPLE DISTRIBUIDA Cuando un cuerpo rígido está sometido a un sistema de fuerzas y momentos de par, a menudo es más sencillo estudiar los efectos externos sobre el cuerpo reemplazando el sistema por una sola fuerza resultante equivalente actuando en un punto específico O y un momento de par resultante. Para mostrar cómo determinar esas resultantes, consideraremos el cuerpo rígido que aparece en la figura.2a y usaremos los conceptos analizados en la sección previa. Como el punto O no está sobre la línea de acción de las fuerzas, un efecto equivalente es producido si las fuerzas son desplazadas hacia el punto O y los correspondientes momentos de par Ml = rl X Fl Y M2 = r2 X F2 son aplicados al cuerpo. Además, el momento de par Me simplemente es desplazado al punto O Por suma vectorial, la fuerza resultante es F R = F 1 + F2, Y el momento de par resultante es MRo = Me + Ml + M2, figura 4-35c. Como se mantiene la equivalencia entre los diagramas en la figura 2, cada sistema de fuerza y par ocasionará los mismos efectos externos, es decir, la misma traslación y rotación del cuerpo. Observe que tanto la magnitud como la dirección de F R son independientes de la ubicación del punto O; ya que es un vector libre. Estos resultados se muestran en la figura.2b.sin embargo, MRo depende de esta ubicación ya que los momentos M1y M2 son determinados usando los vectores de posición rl Y r2' Observe también que MRo es un vector libre y puede actuar en cualquier punto sobre el cuerpo, aunque el punto O generalmente es seleccionado como su punto de aplicación. El método anterior, de simplificar cualquier sistema de fuerza y momento de par a una fuerza resultante que actúe en el punto O y un momento de par resultante, puede ser generalizado y representado mediante la aplicación de las dos ecuaciones siguientes.

La primera ecuación establece que la fuerza resultante del sistema es equivalente a la suma de todas las fuerzas; y la segunda ecuación establece que el momento de par resultante del sistema es equivalente a la suma de todos los momentos de par.
Observe que la fuerza resultante F R es equivalente a la suma vectorial de sus dos componentes F R Y FR '