robot rescatista

of 150
-
Upload
alex-walker -
Category
Documents
-
view
231 -
download
0
Transcript of robot rescatista
-
7/25/2019 robot rescatista
1/150
INSTITUTO POLITCNICO
NACIONAL ESCUELA SUPERIORDE INGENIERA MECNICA Y
ELCTRICA
ROBOT MVIL PARA RECONOCIMIENTODE TERRENOS
T E S I S
QUE PARA OBTENER EL TTULO DE
INGENIERO EN ROBTICA INDUSTRIAL
P R E S E N T A N
Castan Decena Francisco
Cose B!staante Car"os
#art$ne% To&ar Car"os Urie"
ASESORES' #( en C( AURORA APARICIO CASTILLO
#( en C( RUB)N GALICIA #E*A
#+,ico D(F( -.//
-
7/25/2019 robot rescatista
2/150
-
7/25/2019 robot rescatista
3/150
-
7/25/2019 robot rescatista
4/150
ROBOT MVIL PARA RESCATE EN ZONAS DE DESASTRE
TECNOLOGICO NACIONAL DE MEXICOINSTITUTO TECNOLOGICO DE
0
NDICE GENERAL
Contenido
NDICE GENERAL 4
INTRODUCCIN 8
OBJETIVOS 1
JUSTI!ICACIN 11
"IPTESIS 1#
ESTUDIO DEL ESTADO DEL ARTE$ 14
1$1 CONTE%TO "ISTRICO$ 1&
1$# CONTE%TO TECNOLGICO$ 1'
FIGURA 1.1PIQUE 17FIGURA 1.2 HACHA CON PICO 17FIGURA 1.3MARTILLO NEUMTICO 1FIGURA 1.! "OLSA DE LEVANTAMIENTO DE ALTA CAPACIDAD 1#FIGURA 1.$ "OLSA DE LEVANTAMIENTO DE "A%A CAPACIDAD 1#FIGURA 1.&UNIDAD SEPARADOR 2'FIGURA 1.7 GATOS HIDRULICOS PUNTUALES 2'FIGURA 1. VI"RFONO DE SPINIFER 21
FIGURA 1.# VI"ROSCOPIO DE SPINIFER 22FIGURA 1.1' EXPLOSMETRO 22
1$( CONTE%TO COMERCIAL$ #(
DISE)O DEL ROBOT MVIL #&
#$1 AN*LISIS PARA DETERMINAR EL DISE)O$ #+
FIGURA 2.1( DIAGRAMA DE "LOQUES DE LA TCNICA DE RECONOCIMIENTO DETERRENOS Y RESCATE DE VCTIMAS EN TERREMOTOS 27
#$# DIAGNSTICO PREVIO PARA EL DISE)O #8
#$( ALTERNATIVAS DE SOLUCIN PARA DETERMINAR EL DISE)O$ (
TA"LA
2.1 DESCRIPCI)N DE LOS CRITERIOS DE %ERARQUIZACI)N
32TA"LA 2.2 TA"LA DE CRITERIOS DE %ERARQUIZACI)N DELIMITANDO EL PRO"LEMA 32
#$4 SELECCIN DEL DISE)O M*S APROPIADO$ ((
TA"LA 2.3 TA"LA DE CRITERIOS SO"RE SOLUCIONES 3!TA"LA 2.! CRITERIOS* SOLUCIONES Y SU PORCENTA%E TOTAL 3$FIGURA 2.2 DIAGRAMA DE "LOQUES DE LA TCNICA DE RESCATE DE VCTIMAS Y+O DEEXPLORACI)N DE TERRENOS EN TERREMOTOS Y DONDE EL PROYECTO ENTRARIA DEMANERA FUNCIONAL 3&
AN*LISIS DEL ROBOT MVIL (8
($1 DISE)O MEC*NICO (8
TA"LA 3.1 PARTES QUE COMPONEN EL M)VIL Y SU PESO 3
-
7/25/2019 robot rescatista
5/150
ROBOT MVIL PARA RESCATE EN ZONAS DE DESASTRE
TECNOLOGICO NACIONAL DE MEXICOINSTITUTO TECNOLOGICO DE
1
($1$1 C"ASIS DEL PROTOTIPO (,
TA"LA 3.2 DESIGNACIONES DE ALUMINIOS ,11- !'TA"LA 3.3 CLASIFICACI)N DEL ALUMINIO Y SUS ALEACIONES. !1TA"LA 3.! TA"LA DE PROPIEDADES TPICAS DE MATERIALES PARA INGENIERAS S INGLS/ ,11- !$TA"LA 3.$ TA"LA DE PROPIEDADES TPICAS DE MATERIALES PARA INGENIERAS S INTERNACIONAL/ ,11-
!&FIGURA 3.1 DIAGRAMAS DE CORTANTE Y DE MOMENTO DE LA PLACA QUE SOPORTA LOS COMPONENTES!
($1$# MOTORES DE CORRIENTE DIRECTA &
FIGURA 3.2 DIAGRAMA DE CUERPO LI"RE DE LA RUEDA $'FIGURA 3.3 DIAGRAMA DE CUERPO LI"RE DEL LA ORUGA DELANTERA DEL RO"OT $3FIGURA 3.! DIMENSIONES DEL MOTOR EN MILMETROS $$FIGURA 3.$ MOTOR ELCTRICO $$
($1$( CADENAS DE TRANSMISIN - PI)ONES &+
FIGURA 3.& PRINCIPIO DE FUNCIONAMIENTO DE LA CADENA ,!-. $7FIGURA 3.7 EFECTO DE LA CUERDA EN UNA CADENA DE RODILLOS ,!-. $
FIGURA 3. RODAMIENTO RGIDO DE "OLAS. $#FIGURA 3.# CADENA PARA FA"RICAR LA ORUGA DEL RO"OT M)VIL &'FIGURA 3.1' PI0ONES PARA LA TRACCI)N DE LAS ORUGAS DEL RO"OT M)VIL &1FIGURA 3.11 "ALEROS PARA LA PARTE CENTRAL DE LOS PI0ONES DE TRACCI)N DEL RO"OT &2FIGURA 3.12 E%ES SEPARADORES HUECOS PARA LA SU%ECI)N DEL LADO LI"RE DE LA ORUGA &2
($1$4 BATERAS O PILAS +(
FIGURA 3.13 "ATERAS RECARGA"LES QUE UTILIZA EL RO"OT M)VIL &$
($1$& C*MARA ++
FIGURA 3.1! CMARA INFRARRO%A INALM"RICA CON MICR)FONO PARA EL RO"OT M)VIL &7FIGURA 3.1$ RECEPTOR DE FRECUENCIA DE LA CMARA INALM"RICA &FIGURA 3.1& US" DECODIFICADORA DE VIDEO PARA LA SE0AL DE LA CMARA DEL M)VIL
FIGURA 3.17 CIRCUITO ELCTRICO DE LA REGULACI)N DEL VOLTA%E DE LA CMARA ($1$+ SERVOMOTORES '1
FIGURA 3.1 SERVOMOTOR DE LOS "RAZOS DEL RO"OT M)VIL 72
($1$' CONTROL DE RADIO!RECUENCIA '(
TA"LA 3.& RADIOFRECUENCIAS COMERCIALES 73FIGURA 3.1# CONTROL DE RADIOFRECUENCIA DE 2.! GHZ CON $ CANALES 7!FIGURA 3.2' RECEPTOR DEL CONTROL DE RADIOFRECUENCIA Y PAC DE PILAS DE ALIMENTACI)N 7$FIGURA 3.21 RECEPTOR DEL CONTROL DE RADIOFRECUENCIA 7$
($# DISE)O ELECTRNICO '+
($#$1 ESTRUCTURA DEL MVIL '+
FIGURA 3.22 ESTRUCTURA DEL M)VIL CON LA TAR%ETA DE POTENCIA DE LOS MOTORES 7&FIGURA 3.23 PARTE DE A"A%O DEL M)VIL 77
($#$# CIRCUITOS ELECTRNICO '8
FIGURA 3.2! DIAGRAMA ELCTRICO DE LA ETAPA DE CONTROL 7FIGURA 3.2$ DIAGRAMA ELCTRICO DE LA ETAPA DE POTENCIA DE LOS MOTORES 7#FIGURA 3.2& CIRCUITO ELCTRICO DE LA PARTE DE POTENCIA DE LOS MOTORES 'FIGURA 3.27 DIAGRAMA ELCTRICO DE LA FUENTE DE ALIMENTACI)N 1FIGURA 3.2 DIAGRAMA ELCTRICO DE LA FUENTE DE ALIMENTACI)N Y EL PIC1&F&7A 2FIGURA 3.2# DIAGRAMA ELCTRICO DE LOS "USES DE DATOS 2
-
7/25/2019 robot rescatista
6/150
ROBOT MVIL PARA RESCATE EN ZONAS DE DESASTRE
TECNOLOGICO NACIONAL DE MEXICOINSTITUTO TECNOLOGICO DE
2
TA"LA 3.7 ESPECIFICACIONES ELCTRICAS DEL PIC1&F&27A 3FIGURA 3.3' DIAGRAMA DE CONEXI)N DEL L2#3D !TA"LA 3. PINES DE ENTRADAS Y SALIDAS DEL L2#3D !TA"LA 3.# DESCRIPCI)N DE CONFIGURACI)N DE FUNCIONAMIENTO DE LOS MOTORES $FIGURA 3.31 DIAGRAMA ELCTRICO DE TODAS LAS ETAPAS 7FIGURA 3.32 TAR%ETA ELECTR)NICA DE POTENCIA
($( ENSAMBLE- PRUEBAS 8,
FIGURA 3.33 ENSAM"LADO DE LAS PIEZAS DEL RO"OT M)VIL #FIGURA 3.3! MOTOR ELCTRICO* CADENA Y CATARINA DE TRACCI)N DEL RO"OT M)VIL #FIGURA 3.3$ CATARINA CON EL E%E "ARRENADO Y PRISIONERO PARA EL MOTOR #'FIGURA 3.3& CATARINA CON EL E%E SU%ETADO AL MOTOR #'FIGURA 3.37 CATARINA CON CADENA DE LA PARTE DELANTERA DEL RO"OT M)VIL #1FIGURA 3.3 PILAS AA Y TAR%ETA DE POTENCIA DE LOS MOTORES EN EL RO"OT M)VIL #1
RESULTADOS OBTENIDOS ,4
4$1 RESULTADOS ,4
4$# OTROS SISTEMAS ,&
COSTOS- CONCLUSIONES ,'
&$1 COSTOS DEL MATERIAL AD.UIRIDO ,'
TA"LA $.1 MATERIAL ADQUIRIDO POR EL EQUIPO DE TRA"A%O Y SUS COSTOS #TA"LA $.2 MATERIAL PROPORCIONADO POR EL EQUIPO DE TRA"A%O Y LA CANTIDAD DE CADA UNO DE ELLOS
##
&$# CONCLUSIONES GENERALES 1
GLOSARIO 1#
ANE%O I 1,
ANE%O II 11
ANE%O III 144ANE%O IV 14,
BIBLIOGRA!A 1&
/EBGRA!A 1&1
-
7/25/2019 robot rescatista
7/150
PROTOCOLO DEL PROYECTO
ROBOT MVIL PARA
RECONOCIMIENTO DE TERRENOS
-
7/25/2019 robot rescatista
8/150
INTRODUCCIN
La ro3tica &i" en "a act!a"i4a4 se 5a 4esarro""a4o 6ara !n sin7$n 4e so"!ciones
6artic!"ares8 en este tra3a9o se atacar: 6rinci6a"ente e" 6ro3"ea 4e reconocer terrenos
;!e son 4e 4i7$ci" acceso a 6riori4a4 6ara e" ser 5!ano(
Por "o tanto8 e" 6resente 6ro
-
7/25/2019 robot rescatista
9/150
Fina"ente e" Ca6$t!"o 8 4eta""a "os costos =enera"es 4e" ro3ot8 "as conc"!siones8
recoen4aciones < 4isc!siones8 "os c!a"es re6resentan !na &a"iosa retroa"ientacin 6ara
e" e;!i6o 4e tra3a9o en re"acin a e9orar to4os a;!e""os as6ectos ;!e sean necesarios8 < a"
iso tie6o re6resentan in7oracin &a"iosa 6ara a;!e""os interesa4os en e" tea en
est!4io(
E" e;!i6o 4e tra3a9o 6reten4i 4esarro""ar !n 6rototi6o con tecno"o=$a 4is6oni3"e a ni&e"
naciona" ;!e a
-
7/25/2019 robot rescatista
10/150
TECNOLOGICO NACIONAL DE MEXICOINSTITUTO TECNOLOGICO DE VERACRUZ
/.
OBJETIVOS
GENERAL
Pro6orcionar !na 5erraienta ;!e a
ESPECFICOS
A!,i"iar en tareas 4e reconociiento 4e terrenos 6ara 4isin!ir e" ries=o 4e acci4entes en
6ersonas ;!e ten=an coo 7in accesar a 4ic5os "!=ares(
In=resar 6or "!=ares inaccesi3"es 6ara e" 5o3re8 < a
A!entar "a e7icacia < e7iciencia en "a 4eteccin 4e 6ersonas ! o39etos 6ara 4isin!ir e"
7actor tie6o < e9orar res!"ta4os en "as anio3ras 4e reconociiento 4e terrenos(
-
7/25/2019 robot rescatista
11/150
JUSTI!ICACIN
De3i4o a ;!e en "os "tios aos se 5a increenta4o "a necesi4a4 e inter+s 6or tener acceso
a %onas no reconoci4as < 4e 4i7$ci" acceso 6ara "a e,6"oracin 4e terrenos en "!=ares 4on4e
e" ser 5!ano 4i7$ci"ente 6!e4e acce4er8 se 5a 5ec5o necesaria "a i6"eentacin 4e
sisteas contro"a4os &$a reota ;!e 6eritan a
4esastre o a e,6"orar :reas 4e a"to ries=o 6ara e" 5o3re(
E" 4esarro""o 4e !na 5erraienta 4e esta $n4o"e 4e3er: ser ca6a% 4e 4etectar !n sin nero
4e 6ersonas ! o39etos =racias a !na c:ara 4e &isin in7rarro9a con a"cance 4e /1.( >en
con4iciones i4ea"es?(
-
7/25/2019 robot rescatista
12/150
"IPTESIS
E" e;!i6o 4e tra3a9o 6ro6one 4esarro""ar !n Ro3ot #&i" Ina":3rico ;!e sir&a 4e
5erraienta 6ara so"!cionar "a 6ro3"e:tica 4e" reconociiento 4e terrenos8 e" c!a" ten=a "a
ca6aci4a4 4e o&erse 6or "!=ares inaccesi3"es 6ara e" 5!ano < a" iso tie6o8 !estre
i:=enes en tie6o rea" ;!e sir&an 6ara tra%ar !na tra
-
7/25/2019 robot rescatista
13/150
Captulo I
Estudio del Estado del Arte
1.1 Contexto Histrico
1.2 Contexto Tecnolgico
1.3 Contexto Comercial
Este Captulo integra contextos de informacin necesaria para sustentar tericamente elproyecto
-
7/25/2019 robot rescatista
14/150
ROBOT MVIL PARA RESCATE EN ZONAS DE DESASTRE
TECNOLOGICO NACIONAL DE MEXICOINSTITUTO TECNOLOGICO DE
/0
E0tdio de2 E0t3do de2 Ate$
En este ca6$t!"o se tratar:n "os conte,tos 5istricos8 tecno"=icos < coercia"es(
En e" conte,to 5istrico se encionar:n co se ataca3a "a 6ro3"e:tica antes
enciona4a(
Ta3i+n se encionar:n 4entro 4e" conte,to tecno"=ico &arias 5erraientas 4esarro""a4as
en e" 6asa4o 6ara accesar a terrenos 4esconoci4os o 4e 4i7$ci" acceso(
A s! &e%8 en e" conte,to coercia" se ostrar: e" erca4o 4on4e 6!e4e ser intro4!ci4o e"
6ro
-
7/25/2019 robot rescatista
15/150
1$1 Conte5to "i0t6i7o$
No se sa3e con certe%a c!an4o se coen% a atacar "a 6ro3"e:tica8 6ero "os re=istros :s
anti=!os ;!e se tienen son "os escritos 4e C5ina 4ata4os 5ace ... aos < "os c4ices
#a6erros 4e 3s;!e4a 4e 6ersonas ! o39etos? 6ara conocer
o inc"!so encontrar "a "oca"i%acin 4e "as &$ctias se6!"ta4as(
La 5erraienta :s anti=!a ;!e se !ti"i% en e" rescate 4e &$ctias 7!e "a 6a"anca(
Posteriorente e" 5o3re se &io en "a necesi4a4 4e 7a3ricar n!e&os instr!entos ;!e "ea
-
7/25/2019 robot rescatista
16/150
De "as 5erraientas :s act!a"es 6ara e" reconociiento 4e terrenos < &ictias 6osi3"es en
e" "!=ar se tienen(
E" &i3r:7ono(
E" &i3rosco6io(
Con este ti6o 4e 5erraientas se 5a 6o4i4o encontrar !na so"!cin 6ara "a 6ro3"e:tica
antes enciona4a8 sin e3ar=o +sta no 5a satis7ec5o "a necesi4a4 < "a e7icacia necesaria
6ara !n reconociiento o inc"!so "a rec!6eracin 4e 6ersonas ! o39etos en %onas 4e 4i7$ci"acceso 6ara e" 5!ano(
-
7/25/2019 robot rescatista
17/150
!i3 1$# "3793 7on :i7o
1$# Conte5to Te7no26i7o$
En este conte,to se inte=ra "a in7oracin 4e "as 4i7erentes 5erraientas < t+cnicas
!ti"i%a4as 6ara reso"&er "a 6ro3"e:tica(
E" in=reso a "os "!=ares reotos o 4e 4i7$ci" acceso se coen% a rea"i%ar con e" !so 4e "a
6a"anca < e" 6i;!e coo 5erraientas tecno"=icas@ a5ora en aos :s recientes >si="o JJ?
se e6e%aron a e6"ear 4i&ersas tecno"o=$as8 coo son "a 5i4r:!"ica8 ne!:tica io :33 e2 di0eo
E" an:"isis FODA ;!e se 4escri3e a contin!acin se a6"ico a "as t+cnicas e,istentes 4es4e
;!e se tienen re=istros 4e "os +to4os < t+cnicas !ti"i%a4as 6ara rescates &i3r:7ono?(
-
7/25/2019 robot rescatista
32/150
Poco a"cance 4e &is!a"i%acin en 4is6ositi&os 6ticos >&i3rosco6io?(
-
7/25/2019 robot rescatista
33/150
#anteniiento contino a otores 4e co3!stin interna < &:"&!"as ne!:ticas(
Peso e,cesi&o 4e "as 5erraientas ;!e !ti"i%an "os rescatistas(
Amenazas
P!e4e ca!sar 4err!3es "as 5erraientas 4e =o"6eo coo ta"a4ros ne!:ticos(
N!e&as tecno"o=$as en 4esarro""o 6ara e" rescate(
La co6etencia 4e otras arcas 6ara &en4er s!s 6ro4!ctos(
#a" !so 4e "as 5erraientas 6or ine,6eriencia(
En 3ase a este an:"isis FODA8 en c!anto a "as t+cnicas 4e rescate < reconociiento 4e
terrenos ;!e e,isten en "a act!a"i4a48 se 4e3en esta3"ecer "os 6ar:etros 4on4e es
6ertinente e" e6"eo 4e" 6ro
-
7/25/2019 robot rescatista
34/150
TECNOLOGICO NACIONAL DE MEXICOINSTITUTO TECNOLOGICO DEVERACRUZ
.
#$( A2ten3ti>30 de 0o27i6n :33 dete
-
7/25/2019 robot rescatista
35/150
TECNOLOGICO NACIONAL DE MEXICOINSTITUTO TECNOLOGICO DEVERACRUZ
/
Tiempo de Importacin: Costos e"e&a4os en "a a4;!isin 4e "a 5erraienta < accesorios < "a
6+r4i4a 4e tie6os 4e tras"a4os(
Pocos equipos en el mercado nacional: Fa"ta 4e e6resas con tecno"o=$as < e;!i6os
4is6oni3"e(
-
7/25/2019 robot rescatista
36/150
Ruidosas: Por 7a"ta 4e anteniiento8 tecno"o=$a ro3!sta
-
7/25/2019 robot rescatista
37/150
4-Co(ta%i(a&i'(
.M
J
5- Te&(o$o.6ati$i!a"a "e
H1M
J
-
7/25/2019 robot rescatista
38/150
$o&a$i!a&i'(7- Po&a
8isa$i!a&i'(
.
M
J
,9- H. J ,,- Peso 1
T3?23 #$1 De07i:7i6n de 2o0 7iteio0 de @e3;i37i6n
Se"eccin 4e 6ro3"eas(
Criterios : Pro)$e%a Pro)$e%a
Tie%#o .M /880828H888//Costo /.M /88082(H(8/.8//Co(o&i%ie(tos 0.M /88081828H888/.8//I(+raestr&tra -.M /8808288/.8//
/..M /880828/
T3?23 #$# T3?23 de 7iteio0 de @e3;i37i6n de2i
-
7/25/2019 robot rescatista
39/150
#$4 Se2e77i6n de2 di0eo
Desarro""ar 5erraientas < e;!i6o con tecno"o=$a 4is6oni3"e en "a acontainacin acstica?8 6or "o c!a" e" e;!i6o 6ro6on4r: !na so"!cin a
este 6ro3"ea(
0( Uti"i%ar otores e"+ctricos(
1( Desarro""ar ecanisos sin =eneracin 4e !c5as &i3raciones(
-
7/25/2019 robot rescatista
40/150
2( Rea"i%ar !n &i" ;!e !ti"ice otores e"+ctricos 6ara s! 4es6"a%aiento(
-
7/25/2019 robot rescatista
41/150
eguridad: Brin4ar so"!ciones 5acia e" 3!en ane9o o ani6!"acin 4e "a
5erraienta(
H( Rea"i%ar !na =!$a 4e entrenaiento e" c!a" ser&ir: 4e a6o
-
7/25/2019 robot rescatista
42/150
T3?23 #$( T3?23 de 7iteio0 0o?e 0o27ione0
-
7/25/2019 robot rescatista
43/150
Por "o tanto e" e;!i6o 4e tra3a9o 4eci4i en7ocarse a estas 6osi3"es so"!ciones'
I( Rea"i%ar !na 5erraienta "a c!a" 6erita tener !n acceso :s a6ro6ia4o(
II( Uti"i%ar !na c:ara 6ara 4ar !na e&a"!acin 4e" :rea8 < as$ 6osteriorente
o&er esco3ros < 6o4er accesar sin 6oner en ries=o "a &i4a 4e "as &$ctias
-
7/25/2019 robot rescatista
44/150
456589: ;
-
7/25/2019 robot rescatista
45/150
!IGURA #$# DIAGRAMA DE BLO.UES DE LA TCNICA DE RESCATE DE VCTIMAS-HO DE E%PLORACIN DE TERRENOS EN TERREMOTOS - DONDE EL PRO-ECTO
ENTRARIA DE MANERA !UNCIONAL
-
7/25/2019 robot rescatista
46/150
Captulo III
An"lisis del %oot &!il
3.1 Diseo mec"nico
3.2 Diseo electrnico
3.3 'rueas
-
7/25/2019 robot rescatista
47/150
En este captulo obtendremos un modelo virtual y fsico del proyecto el cual estarsustentado por clculos fsicos para cada una de las partes que integran el proyecto.
-
7/25/2019 robot rescatista
48/150
AN*LISIS DEL ROBOT MVIL
En 3ase a "o ;!e e" e;!i6o 4e tra3a9o 4eterin en e" ca6it!"o anterior8 a;!$ se 4esarro""a
6aso a 6aso e" con9!nto 4e "as 6artes ;!e constit!
-
7/25/2019 robot rescatista
49/150
E" 6eso a6ro,ia4o 4e" 6rototi6o ser: 4e 2 i"o=raos ;!e es "o ;!e consi4era e" e;!i6o 4e
tra3a9o coo "$ite enor 6ara "a resistencia ec:nica a es7!er%os( E" Taao 4e"
-
7/25/2019 robot rescatista
50/150
6rototi6o ser: 4e .c , 0c contan4o "as artic!"aciones 4e"anteras e,ten4i4as < 4e .c
, .c con "a 6arte 4e"antera 4e "as artic!"aciones sin e,ten4er(
A contin!acin se 4eta""an 6or 6artes "os c:"c!"os rea"i%a4os 4e to4os "os e"eentos ;!e
conte6"an "a estr!ct!ra 4e" ro3ot &i"(
($1$1 C"ASIS DEL PROTOTIPO
E" a"!inio es !n eta" "i=ero con !na 4ensi4a4 4e -(H. =c >-H/. =?8 < 6or e""o8
a!n;!e "as a"eaciones 4e a"!inio tienen caracter$sticas ec:nicas re"ati&aente 3a9as
co6ara4as con "as 4e" acero8 s! re"acin resistencia6eso es e,ce"ente( Es 6recisaente4e3i4o a esto ;!e e" a"!inio se !ti"i%a c!an4o e" 6eso es !n 7actor i6ortante8 coo oc!rre
en "as a6"icaciones aeron:!ticas < 4e a!toocin(
Es !no 4e "os 6rinci6a"es eta"es !ti"i%a4os 6ara i"es 4e a6"icaciones a ni&e" in4!stria" '. !1 J K 8
A5ora "a car=a 4e ca4a "a4o 4e" &i" es 4e =8 6or;!e ca4a otor 4e3e o&er esa asa
a6ro,ia4aente(
C 3J/
#.1
/ 2#.!3N
2
A5ora tenien4o "a car=a C ;!e es "a isa ;!e "a 7!er%a nora" teneos'
F '.''$$2#.!3N/
A5ora F K ;
N!estra 4istancia es !n ra4io r 4e "a r!e4a8 ;!e es r 1c
> '.1&1& N/ K $8/
> '.'#3 N K 8
Ca3ian4o Netons a !ni4a4es 4e asa teneos
> '.'2J/$8/
-
7/25/2019 robot rescatista
65/150
)ste es e" tor;!e $nio necesario 6ara 6o4er o&er e" &i" 4e anera 5ori%onta"(
-
7/25/2019 robot rescatista
66/150
F 2'. 1 N
2. 12 J
A5ora se ca"c!"a a ;!e inc"inacin es ca6a% 4e 4es6"a%arse e" &i"( La ec!acin 6ara
c:"c!"os 4e 6en4iente 4e !n &i" es'
F M K K G
Don4e
M asa 4e" &e5$c!"o
=ra&e4a4
G =ra4o 4e "a 6en4iente >seno ?
E6e%aos !ti"i%an4o e" :,io :n=!"o 6osi3"e en con4iciones nora"es 6ara c!a";!ier
&i"8 < este es 4e 01(
F 3J/ #.12
/
-
7/25/2019 robot rescatista
67/150
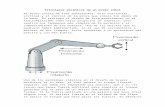
>!$ 1'. &' J K 8
> 12 J K 8
2'8
'.17J
2'81'8
Por "o tanto se"eccionaos e" otor coercia" 4e /- 4e corriente 4irecta con !n tor;!e
4e'
A" i=!a" ;!e ca"c!"aos e" tor;!e necesario 6ara o&er e" &i"8 teneos ;!e ca"c!"ar e"
tor;!e $nio 6ara 6o4er se"eccionar e" ser&ootor ;!e 4ar: "a o&i"i4i4a4 a "as
artic!"aciones 4e "as 3an4as 4e"anteras 4e" &i"(
Dia=raa 4e c!er6o "i3re'
Ban4a 4e transisin
.(/H=
!i3 ($( Di33
-
7/25/2019 robot rescatista
68/150
> F K ;
-
7/25/2019 robot rescatista
69/150
>@ $. &1J K 8
>1 '.17J/1'8/ 1.7J
K 8 >2 '.17J/2'8/
3.7!J K 8
S!an4o a3os tor;!es o3teneos'
>1 >2 1.7J K 8 3.7!J K 8
Por "o tanto se !ti"i%ar:n ser&ootores 4e "as isas caracter$sticas 4e 7!er%a ;!e "os
otores se"ecciona4os 6ara "a 6arte 4e traccin 4e" &i"
-
7/25/2019 robot rescatista
70/150
2&.$
Dia=raa es;!e:tico 4e" otor con 4iensiones en >?'
!i3 ($4 Di
-
7/25/2019 robot rescatista
71/150
($1$( CADENAS DE TRANSMISIN - PI)ONES
Ventajas de la transmisin por cadenas
La &ariacin en "a 4istancia 4e centros 4e "a 7"ec5a se 6!e4e acoo4ar :s 7:ci"ente(
Las ca4enas < 3an4as son :s 7:ci"es 4e insta"ar < ree6"a%ar ;!e otros ti6os 4e
"ocoocin8 4e3i4o a ;!e "a 4istancia 4e centros entre "as !ni4a4es 4e con4!ccin < "as
con4!ci4as no necesitan ser re4!ci4as 6ara "a insta"acin(
Las ca4enas no se 4es"i%an ni se res3a"an8 coo "o 5acen "as trasisiones con
3an4a(
Las ca4enas no 4esarro""an car=as est:ticas(
Las ca4enas no se 4eterioran con e" tie6o8 e" ca"or8 e" aceite ni "a =rasa >a!n;!e se
o,i4en no "es ca!sa a
-
7/25/2019 robot rescatista
72/150
!i3 ($+ Pin7i:io de n7ion33icic"etas8 otocic"etas < a!to&i"es?8 en :;!inas a=r$co"as8 trans6orta4oras < e;!i6os
in4!stria"es en =enera"(
E" 6rinci6io 4e 7!ncionaiento se 3asa en ;!e "a transisin 4e 6otencia entre "a ca4ena N$;!e"i4r!ro et:"ico?
Bater$as 4e LiPo >Litio6o"$ero?
Coo &enta9as 7!n4aenta"es8 "as 3ater$as 4e Ni# tienen !na aca6aci4a4 4e car=aasa 4e "a 6i"a?8 no contienen Ca4io ;!e es !n e"eento !< t,ico
en contacto con e" e4io a3iente < no tienen e7ectos 4e 6+r4i4a 4e ca6aci4a4 6or a" !so8
o 4e 7oracin 4e sarro coo "as 4e NiC4(
Un incon&eniente es ;!e no a4iten !na car=a tan r:6i4a coo "as 4e NiC48 sin e" ries=o
4e 4eteriorar"as8 sin e3ar=o8 e" tie6o ;!e 4!ra "a 6i"a car=a4a es a
-
7/25/2019 robot rescatista
81/150
La =ran 4es&enta9a 4e estas 3ater$as es ;!e re;!ieren !n trato !c5o :s 4e"ica4o8 con e"
ries=o 4e 4eteriorar"as irre&ersi3"eente o8 inc"!so8 ""e=ar a 6ro4!cir s! i=nicin o
e,6"osin 1(
-
7/25/2019 robot rescatista
82/150
En =enera"8 6recisan !na car=a !c5o :s "enta ;!e "as 4e NiC4 o 4e Ni#( A4e:s8 "a
car=a 4e "as 3ater$as 4e LiPo no 6ro4!ce e" 6ico 4e tensin caracter$stico 4e "as 4e NiC4 o
Ni# a" a"can%ar "a :,ia car=a8 6or "o ;!e se 6recisan car=a4ores es6ecia"es 6ara
"as 3ater$as 4e LiPo@ 3a9o nin=n conce6to se 4e3er:n car=ar con car=a4ores 4isea4os
6ara NiC4 o Ni#(
No s"o eso@ n!nca se 4e3er:n 4escar=ar 5asta e" "$ite 4e 4e9ar"as en . co es 6osi3"e
5acer"o con "as 4e NiC4 o Ni#8 6or ;!e se corre e" ries=o 4e 4eteriorar s! ca6aci4a4 4e
car=a irre&ersi3"eente(
Por e""o8 4e3er:n !sarse8 en o4e"os e"+ctricos8 contro"a4ores 4e &e"oci4a4 es6ecia"es 6ara
3ater$as 4e LiPo8 ;!e cortan "a corriente 6or 4e3a9o 4e 4eterina4o &o"ta9e cr$tico(
Un "tio incon&eniente es s! 6recio8 en =enera" a"re4e4or 4e" 4o3"e 4e !n 6ac 4e
ca6aci4a4 e;!i&a"ente 4e Ni#8 a!n;!e e" 6recio &a 3a9an4o r:6i4aente con s! r:6i4a
intro4!ccin en e" erca4o < "a a6aricin 4e n!e&as arcas 4e a
-
7/25/2019 robot rescatista
83/150
!i3 ($1( B3te30 e733?2e0 ;e ti2i3 e2 o?ot i2
#e4iante estos co6onentes se ""e&ara a ca3o "a 6arte ec:nica 4e" ro3ot &i" con "o c!a"
se conc"!
-
7/25/2019 robot rescatista
84/150
($1$& C*MARA
Se"eccion e" e;!i6o 4e tra3a9o "a c:ara con "as caracter$sticas si=!ientes 6or ser "a :s
a4ec!a4a en e" erca4o 6ara e" o39eti&o ;!e se necesita'
Caracter$sticas'
Sistea 4e "a C:ara' NTSC
Reso"!cin' . L$neas Frec!encia 4e tra3a9o' /(-G5%
Potencia' 1. /..
L!inosi4a4 $nia ' L!,
An=!"o 4e Fi"acin' 1. =ra4os
o"ta9e' DC >Los a4a6ta4ores &ienen inc"!i4os?
Peso 4e "a C:aras' -.. =raos
Sensor C#OS
Esta 6e;!ea c:ara es e,ce"ente 6ara i4enti7icar a 6ersonas < 6ara !ti"i%ar"a 6ara "a
"oca"i%acin 4e "as &$ctias en es6acios !< 6e;!eos( Es !ti"i%a4a conente 6ara
&i=i"ar ne=ocio8 casa8 3anco8 9o
-
7/25/2019 robot rescatista
85/150
Se 6!e4e !sar 4e anera ina":3rica o a":3rica(
-
7/25/2019 robot rescatista
86/150
!i3 ($14 C=
-
7/25/2019 robot rescatista
87/150
!i3 ($1& Re7e:to de e7en7i3 de 23 7=
-
7/25/2019 robot rescatista
88/150
E" e;!i6o 4e tra3a9o se"ecciono "a si=!iente tar9eta 4eco4i7ica4ora 4e &i4eo8 6or ser
coercia"ente 7:ci" 4e encontrar < 6or s! 3a9o costo(
-
7/25/2019 robot rescatista
89/150
!i3 ($1+ USB de7odiK73do3 de >ideo :33 23 0e32 de 23 7="a6to6? 6ara 6o4er &er "as i:=enes ;!e "a c:ara(
Para "a a"ientacin 4e "a c:ara ina":3rica 7!e necesario 4isear !na 7!ente 4e
a"ientacin in4e6en4iente ;!e s!inistrara !n &o"ta9e 4e &c4 a /1A58 toan4o "a
a"ientacin 4es4e "a 7!ente 6rinci6a" 4e" ro3ot ;!e es 4e /-&c4 a 1...A58 a
contin!acin se !estra e" circ!ito ;!e 7!e 4isea4o 6ara este 7in(
!i3 ($1' Ci7ito e27ti7o de 23 e237i6n de2 >o2t3@e de 237=
-
7/25/2019 robot rescatista
90/150
Los co6onentes ;!e 7oran este circ!ito son "os si=!ientes'
S/ Z Interr!6tor 6rinci6a"
-
7/25/2019 robot rescatista
91/150
TECNOLOGICO NACIONAL DE MEXICOINSTITUTO TECNOLOGICO DEVERACRUZ
H.
F/ Z F!si3"e 4e 6roteccin
D/ Z Dio4o 4e 6ro6sito =enera"
RG/ Z Re=!"a4or 4e &o"ta9e H. >&?
L/ Z Bo3ina
CN/ Z Terina" 4e cone,in 6ara "a a"ientacin 4e "a c:ara
Esta 7!ente est: 4isea4a 6ara entre=arnos !n &o"ta9e 4e &o"ts 4e C(D( a /1A5 6ara
6o4er a"ientar "a c:ara8 e" 7!si3"e 6rote=e e" circ!ito 6or si ""e=a a 5a3er !n corto
circ!ito en a"=!no 4e "os co6onentes(
E" 4io4o esta 6ara 6rote=er e" circ!ito en caso 4e ;!e se conecte a" re&+s "a 7!ente 4e
a"ientacin8
-
7/25/2019 robot rescatista
92/150
> 3. 73J+M
($1$+ SERVOMOTORES
A;!$ en esta 6arte se 4escri3en "os ser&ootores ;!e e" e;!i6o 4e tra3a9o se"ecciono 6ara "a6arte 4e"antera 4e" &i"8 es 4ecir@ "os 3ra%os &i"es 4e" ro3ot(
Ca"c!"o 4e "a &e"oci4a4 4e" &i"
Re&o"!ciones 4e" #otorre4!ctor' -..rpm
Di:etro 4e transisin' /.cm
Ca"c!"aos e" 6er$etro'P : K D
P : K 1'8 31.1!1$8
> I >E K P
> 2''> K 31.1!1$8
2''> K 31.1!1$8 &23.18+:
> I .&23.18
&':
/ . /.
1J/
1: 1 1'''''8
a3ien4o rea"i%a4o "os c:"c!"os necesarios 6ara "a se"eccin 4e "os otores 4e" ro3ot &i"
< 4eci4ien4o ;!e ser$an 4e "a isa ca6aci4a4 "os ser&ootores8 e" e;!i6o 4e tra3a9o
4eci4i !ti"i%ar"os 6ara "a traccin 4e "os 4e "os 3ra%os 4e"anteros 4e" &i" 6!es se
-
7/25/2019 robot rescatista
93/150
re;!ieren con "as isas caracter$sticas ;!e e" otor8 < estas son "as caracter$sticas 4e "os
ser&os ;!e se se"eccionaron'
-
7/25/2019 robot rescatista
94/150
A 1-5 V-@
Torque m0$imo: /1 =c1elocidad: .(-- se=( 2.K
A 3-9 V-@
Torque m0$imo: / =c1elocidad: .(/ se=( 2.K
Dimensiones: H0 , -(/ , 10(Peso: /..=
entido de giro: Contrare"o9 4e / a - s8 re"o9 4e - a / s(
A;!$ se !estra !na ia=en 4e "os ser&os ;!e conten4r: e" ro3ot &i"'
!i3 ($18 Se>o
-
7/25/2019 robot rescatista
95/150
($1$' CONTROL DE RADIO!RECUENCIA
Las 7rec!encias coercia"es 4e ra4io7rec!encia se c"asi7ican 4e "a si=!iente anera'
NombreAbreviaturainglesa
Banda
ITUFrecuencias
Longitud deonda
[ % \ /..(...
E,tra 3a9a 7rec!encia E,tree""e4?
CN/2 Z B!s 4e 4atos >Contro" 4e otores?
CN/H ZB!s 4e 4atos >Sensores?8 >en caso 4e ;!e as$ se re;!iera?
tapa de potencia
La tar9eta 7!e 4isea 6ara tra3a9ar con re"e&a4ores coo interr!6tores 6ara acti&ar "os
otores a 4os &e"oci4a4es8 sien4o s! eta6a 4e 6otencia 6ara acti&acin 4e "os re"e&a4ores
!n circ!ito L-D coo a6"i7ica4or 4e sea"(
-
7/25/2019 robot rescatista
104/150
!i3 ($#& Di33
-
7/25/2019 robot rescatista
105/150
!i3 ($#+ Ci7ito e27ti7o de 23 :3te de :oten7i3 de 2o0 Contro" 4e #otores?
-
7/25/2019 robot rescatista
106/150
La tar9eta e"ectrnica se 4ise en 3ase a "os re;!eriientos 4e 6otencia < &ersati"i4a4
necesaria 6ara s! 6tio 7!ncionaiento18 "a 6riera tar9eta se 4ise con !n
icrocontro"a4or 4e !so coercia" 6ara s! 7:ci" a4;!isicin >PIC/2F2-HA2-?8 s! crista"
interno nos a
PIC/2F2-HA < se i6"eentan - ca6acitores 4e --6F 6ara esta3i"i%ar e" &o"ta9e < e&itar
;!e e" PIC se 6!e4a reiniciar(
!i3 ($#' Di33
-
7/25/2019 robot rescatista
107/150
!i3 ($#8 Di33
-
7/25/2019 robot rescatista
108/150
En "a ta3"a si=!iente se !estran "as es6eci7icaciones t+cnicas 4e" PIC/2F2-HA 4e3i4o a
estas se 4eci4i i6"eentar !na eta6a 4e 6otencia ;!e a contin!acin se e,6"icar: :s a
-
7/25/2019 robot rescatista
109/150
4eta""e( >E" resto 4e "as es6eci7icaciones e"+ctricas 4e" PIC se 6!e4en o3ser&ar en e"
A6+n4ice I?(
T3?23 ($' E0:e7iK737ione0 E27ti730 de2 PIC1+!+#'A
La corriente :,ia 4e tra3a9o 4e" PIC/2F2-HA en s!s 6ines c!an4o est: con7i=!ra4o
coo sa"i4a es 4e -1A < "os o6toaco6"a4ores ;!e se inc"!
-
7/25/2019 robot rescatista
110/150
!i3 ($( Di33
-
7/25/2019 robot rescatista
111/150
MOTOR, Des&ri#&i'( MOTOR/ Des&ri#&i'(
. . . #otor /
A6a=a4o
. . . #otor /
A6a=a4o. . / Giro Derec5a
Ba9a
. . / Giro Derec5a
Ba9a
. / . Giro I%;!ier4a
Ba9a e"oci4a4
. / . Giro I%;!ier4a
Ba9a e"oci4a4
. / / #otor /A a a4o
. / / #otor /A a a4o
/ . . #otor /A6a=a4o
/ . . #otor /A6a=a4o
/ . / Giro Derec5a
A"ta
/ . / Giro Derec5a
A"ta
/ / . Giro I%;!ier4a
A"ta e"oci4a4
/ / . Giro I%;!ier4a
A"ta e"oci4a4
/ / / #otor /A a a4o
/ / / #otor /A a a4o
T3?23 ($, De07i:7i6n de 7onK37i6n de n7ion3
-
7/25/2019 robot rescatista
112/150
Fina"ente se 6roce4i a 4esarro""ar"o en !n so"o circ!ito e"+ctrico to4as "as - eta6as 9!ntas
< 6osteriorente 5acer 6r!e3as 7$sicas
-
7/25/2019 robot rescatista
113/150
!i3 ($(1 Di33
-
7/25/2019 robot rescatista
114/150
Posteriorente e" e;!i6o 4e tra3a9o coen% a aco6"ar "os circ!itos en e" ro3ot &i"(
En "a ia=en si=!iente ostraos "a tar9eta 4e 6otencia 4e" &i" "a c!a" es "a ;!e &a
4irectaente a "os otores 6ara "a traccin 4e" iso(
!i3 ($32 T3@et3 e2e7t6ni73 de :oten7i3
Una &e% 7!ncionan4o esta tar9eta < &eri7ican4o ;!e no 5a3$a errores en "as acti&aciones 4e
"os o6toaco6"a4ores ;!e est:n en "a tar9eta < ;!e e" PIC si se enc!entra tra3a9an4o 4e
anera e7iciente8 6roce4ios a i6"eentar e" rece6tor 4e "a sea" 4e ra4io 7rec!encia(
#e4iante este rece6tor e" ro3ot &i" reci3ir: "as sea"es ;!e "e sean an4a4as 4es4e e"
contro" ;!e ten4r: en s! 6o4er e" o6erario o rescatista8 6ara an4ar "a sea" 4e o&iientos
4e" iso(
-
7/25/2019 robot rescatista
115/150
($( ENSAMBLE - PRUEBAS
Una &e% 4esarro""a4os "os c:"c!"os 6ara 4eterinar "os otores a !ti"i%ar < se"eccionar "acirc!iter$a e"ectrnica necesaria8 e" e;!i6o 4e tra3a9o 6roce4i a ensa3"ar to4as "as 6artes
4e" &i" < !na &e% terina4o e" &i" 6roce4ios a "as 6r!e3as 6ara &eri7icar e"
7!ncionaiento correcto 4e to4as "as tar9etas < 4e "a traccin 4e" &i"(
!i3 ($(( En03
-
7/25/2019 robot rescatista
116/150
TECNOLOGICO NACIONAL DE MEXICOINSTITUTO TECNOLOGICO DE
.
!i3 ($(& C3t3in3 7on e2 e@e ?3en3do :i0ioneo :33 e2
-
7/25/2019 robot rescatista
117/150
!i3 ($(' C3t3in3 7on 73den3 de 23 :3te de23nte3 de2 o?ot i2
Se i6"eentaron to4as "as cosas en e" &i" 6ara ase=!rarnos 4e ;!e to4o ca3e 4entro 4e"
iso(
!i3 ($(8 Pi230 AA t3@et3 de :oten7i3 de 2o0
-
7/25/2019 robot rescatista
118/150
Ta3i+n rea"i%aos "as 6r!e3as con e" ro3ot &i" 6ara &er "a &e"oci4a4 :,ia a "a ;!e
es ca6a% 4e 4es6"a%arse(
Los 4es6"a%aientos 6ara "as 6en4ientes "as rea"i%aos en esca"eras < en terracer$as 6ara
&er ;!+ tan 7:ci"ente se 6!e4e o&er e" ro3ot o si 6resenta3a atascaientos 6or e" terreno
4on4e se 4es6"a%a3a(
-
7/25/2019 robot rescatista
119/150
Captulo I(
%esultados )tenidos
#.1 %esultados
#.2 )tros sistemas
-
7/25/2019 robot rescatista
120/150
En este captulo se detallan los resultados que el equipo de trabajo obtuvo en cuanto ha
cmo quedo desarrollado el proyecto.
-
7/25/2019 robot rescatista
121/150
RESULTADOS OBTENIDOS
4$1 RESULTADOS
D!rante e" 4esarro""o e i6"eentacin 4e" ro3ot &i" ina":3rico e" e;!i6o 4e tra3a9o
o4i7ico !n 6oco "as e,6ectati&as 4e" coo esta3a 6"antea4o ori=ina"ente8
o6ort!na 4e "as &ictias
c:ara ;!e "e 7!e i6"eenta4a(
Coo "tio 6!nto e" ro3ot &i" 6or ser 4e 4iensiones 6e;!eas tiene "a &enta9a 4e ;!e
6o4r: accesar 6or %onas estrec5as < 4es6"a%arse :s 7:ci"ente entre "os esco3ros
e4iante s! traccin 4e or!=as@ as$ ""e=ar$a :s r:6i4aente a "a %ona 4on4e se "oca"ice "a
&$ctia
-
7/25/2019 robot rescatista
122/150
4$# OTROS SISTEMAS
E,isten otros ca6os 4e e9oraiento 4e" ro3ot &i"8 coo 6o4r$an ser'
I6"eentar"e "os sensores in7rarro9os GPS?(
Contro"ar"o e4iante sensores 4e !"trasoni4o 6or;!e estos 6!e4en ca"c!"ar inc"!so
sea"es !< senci""as con "as c!a"es se 5ar$a :s sensi3"e e" ro3ot &i" a "a
4eteccin 4e "as &$ctias
-
7/25/2019 robot rescatista
123/150
Captulo (
Costos * Conclusiones
+.1 Costos
+.2 Conclusiones
-
7/25/2019 robot rescatista
124/150
En este captulo se detallan los costos del material para la construccin del robot mvilque el equipo de trabajo desarrollo y las conclusiones generales.
-
7/25/2019 robot rescatista
125/150
COSTOS - CONCLUSIONES
&$1 COSTOS DEL MATERIAL AD.UIRIDO
En esta 6arte se 4es="osa < 4eta""an "os costos 4e" ateria" !ti"i%a4o 6ara 4esarro""ar e"
ro3ot &i"(
Ca3e encionar ;!e to4o e" ateria" !ti"i%a4o 7!e encontra4o en e" 6a$s8 a!n;!e
ciertaente &arias 6ie%as 4e "as ;!e se !ti"i%aron son 4e i6ortacin8 nosotros no
re;!erios 4e rea"i%ar"as
-
7/25/2019 robot rescatista
126/150
Catarina de acero
para bicicleta modelo
B!N$TT$ de *)
- ] -.
-
7/25/2019 robot rescatista
127/150
Barra solida de aluminio
de )1*3 de *. cm de / ] /(2
C6mara inal6mbrica
con visin in7rarroja 0
deteccin de sonido de
8V C" 0 receptor con
tarjeta U'B
decodi7icadora de video
/ ] -.
Cargador de pila
recargable 8V 0 pila de / ] /H.T$TAL )) ( 9)*-:-9
T3?23 &$1 M3tei32 3d;iido :o e2 e;i:o de t3?3@o 00 7o0to0
Esta ta3"a !estra e" ateria" a4;!iri4o 6or e" e;!i6o 4e tra3a9o8 e" 4e:s ateria" ;!e se
!ti"i% 6ara "a e"a3oracin 4e" ro3ot &i" 7!e 6ro6orciona4o 6or nosotros isos < se!estra a contin!acin'
AT!RIAL UTILI&A"$ CANTI"A" "! %I!&A'
%ilas de Ni5; 2:-V
Corriente "irecta -
Cadenas grandes de
motocicleta para la
traccin del robot mvil
/ 4e /(01 etros 4e "ar=o
Cadena c
-
7/25/2019 robot rescatista
128/150
Circuitos electrnicos de
control 0 tarjetas -
-
7/25/2019 robot rescatista
129/150
Control de radio
7recuencia de *:- >;=
con receptor 0
/
Torniller?a de varias
medidas tipo Allen /-
Remac
-
7/25/2019 robot rescatista
130/150
TECNOLOGICO NACIONAL DE MEXICOINSTITUTO TECNOLOGICO DEVERACRUZ
/..
&$# CONCLUSIONES GENERALES
Coo !na conc"!sin =enera" se 6!e4e 4ecir ;!e e" 6ro
-
7/25/2019 robot rescatista
131/150
"ar=o ;!e "as 4e atr:s < "a traccin 4e" ro3ot &i" est: s!inistra4a 6or !n nico otor 4e
ca4a "a4o 4e" &i"(
Coo conc"!sin 7ina" se 6!e4e 4ecir ;!e a6ren4$ !c5o acerca :s ;!e na4a 4e" 4iseo
ec:nico 4e" ro3ot
-
7/25/2019 robot rescatista
132/150
GLOSARIO
A$ea&i'(@ Es !na e%c"a s"i4a 5oo=+nea 4e 4os o :s eta"es8 o 4e !no o :s eta"es
con a"=!nos e"eentos no et:"icos( Se 6!e4e o3ser&ar ;!e "as a"eaciones est:n
constit!i4as 6or e"eentos et:"icos en esta4o e"eenta" >esta4o 4e o,i4acin n!"o?8 6or
e9e6"o Fe8 A"8 C!8 P3( P!e4en contener a"=!nos e"eentos no et:"icos 6or e9e6"o P8 C8
Si8 S8 As( Para s! 7a3ricacin en =enera" se e%c"an "os e"eentos ""e&:n4o"os a
te6erat!ras ta"es ;!e s!s co6onentes se 7!n4an(
A%#$i+i&a"or O#era&io(a$@ Un a6"i7ica4or o6eraciona"8 es !n circ!ito e"ectrnico
nora"ente se 6resenta coo circ!ito inte=ra4o ;!e tiene 4os entra4as < !na sa"i4a 2( La
sa"i4a es "a 4i7erencia 4e "as 4os entra4as !"ti6"ica4a 6or !n 7actor 4e =anancia(
At'%atas Pro.ra%a)$es@ Es !n e;!i6o e"ectrnico 6ro=raa3"e con ar;!itect!ra8 e"
sistea o6erati&o < e" "en=!a9e 4e 6ro=raacin est:n 4isea4os 6ara contro"ar8 en tie6o
rea" < en !n a3iente in4!stria"8 6rocesos sec!encia"es(
C*%ara "e 8isi'( I(+rarroja@ Es !n a6arato ;!e 6erci3e "a ra4iacin in7rarro9a eiti4a 4e
"os c!er6os 4etecta4os < ;!e "a trans7ora en i:=enes "!inosas 6ara ser &is!a"i%a4a 6or
e" o9o 5!ano( Las i:=enes &is!a"i%an en !na 6anta""a8 < tien4en a ser onocro:ticas8
6or;!e se !ti"i%a !n s"o ti6o 4e sensor ;!e 6erci3e !na 6artic!"ar "on=it!4 4e on4a
in7rarro9a( #!estran "as :reas :s ca"ientes 4e !n c!er6o en 3"anco < "os enos en ne=ro8 contro"a4or 4e inter7a% 6eri7+rico?( Es !n icrocontro"a4or
3asa4o en eoria EPRO#FLAS 4esarro""a4o 6or #icroc5i6 Tec5no"o=< (
Pi(es tor(ea"os@ Los 6ines son "os 6e;!eos X6a"itos tornea4osX !ti"i%a4os 6ara enc5!7ar
!n 4is6ositi&o en otro( Tenien4o !na e9or con4!cti&i4a4 ;!e con "os circ!itos nora"es(
Por e9e6"o "os a"=!nos icro6rocesa4ores !ti"i%an 6ines 6ara 6o4er enc5!7arse en e"
socet 4e "a 6"aca a4re(
Pi'(@ Se "e ""aa 6in a "a r!e4a 4e enos 4ientes 4e "as 4os ;!e 7oran !n en=rana9e(
Si e" 6in tiene 6ocos 4ientes se s!e"en 7resar "os 4ientes en e" iso e9e otor(
Pote(&i'%etro@ Es !n resistor c!
-
7/25/2019 robot rescatista
138/150
Ro)'ti&a@ La ro3tica es !na ciencia ;!e s!r=e 4e "a necesi4a4 4e" ser 5!ano 4e crear
:;!inas a!to:ticas con "a 7!ncin 4e ""e&ar a ca3o tareas 6e"i=rosas8 6esa4as8 re6etiti&as
-
7/25/2019 robot rescatista
139/150
< tra3a9os 4on4e ;!i%:s "as anos 4e" 5o3re no 6!e4a inter&enir@ est: re"aciona4a con "a
in=enier$a ec:nica8 in=enier$a e"+ctrica8 in=enier$a e"ectrnica < "a inte"i=encia arti7icia"(
Ro)ot M'8i$@ Es e" Ro3ot ;!e 6osee a!tono$a 6ara 4es6"a%arse en !n a3iente
4esconoci4o < es ca6a% 4e 6erci3ir8 6"ani7icar < act!ar sin "a inter&encin o con !na
inter&encin !< $nia 4e" ser 5!ano(
Se(sor I(+rarrojo@ Es !n 4is6ositi&o e"ectrnico ca6a% 4e e4ir "a ra4iacin
e"ectroa=n+tica in7rarro9a 4e "os c!er6os en s! ca6o 4e &isin( To4os "os c!er6os
re7"e9an !na cierta canti4a4 4e ra4iacin8 esta res!"ta in&isi3"e 6ara n!estros o9os 6ero no
6ara estos a6aratos e"ectrnicos8 Xresistencia 4e trans7erenciaX?(
Ve&tor@ Un &ector es !ti"i%a4o 6ara re6resentar !na a=nit!4 7$sica e" c!a" necesita 4e !n
4!"o < !na 4ireccin>! orientacin? 6ara ;!e4ar 4e7ini4o( Los &ectores se 6!e4en
re6resentar =eo+tricaente coo se=entos 4e recta 4iri=i4os o 7"ec5as en 6"anos
@ es 4ecir8 3i4iensiona" o tri4iensiona"(
Vi)r*+o(o #ara res&ate@ Es !n 4is6ositi&o ;!e 6erite 4etectar "a 6resencia 4e !na
&$ctia se6!"ta4a 3a9o esco3ros 4es6!+s 4e !na cat:stro7e < 4eterina s! e6"a%aiento
e,acto( E" :s $nio soni4o eiti4o 6or "as &ictias es s!sce6ti3"e 4e ser ca6ta4o 6or
este e;!i6o con !na sensi3i"i4a4 e,ce6ciona"(
-
7/25/2019 robot rescatista
140/150
Vi)ros&o#io@ A6arato ;!e sir&e 6ara e4ir "as &i3raciones 4e "os c!er6os( E" &i3rosco6io
6erite e,6"orar "os esco3ros < con&ersar con !na &$ctia &$a !n icr7ono incor6ora4o
en !na c:ara(
-
7/25/2019 robot rescatista
141/150
1$C45@>? ;B@? 4<
-
7/25/2019 robot rescatista
142/150
ANE%O III
LNEAS DEL PROGRAMA DE LA TARETA DE POTENCIA DEL ROBOT MVIL
INCL;DEP,3F3/4A-INCH CONFIGCPOFFJDATACPOFFJLVPOFFJBORENONJMCLREOFFJDTOFFJPRTEONJINTOSCOSCNOCL
-
7/25/2019 robot rescatista
143/150
BCF PORTA1CALL RETARDO
-
7/25/2019 robot rescatista
144/150
BSF PORTA1CALL RETARDOBCF PORTA1CALL RETARDOBSF PORTA1CALL RETARDOBCF PORTA1CALL RETARDOBSF PORTA1BTFSC PORTA, PREG;NTA EL INICIO DE LAPELEAGOTO SALE
B;SK;EDABSF PORTA1MOVL D/MOVF N;M2BTFSS N;M19GOTO IZK;IERDA
MOVL D1MOVF N;M3
DERECABSF PORTB2 VELOCIDAD LADO IZK;IERDOBCF PORTB3 VELOCIDAD LADO DERECOBSF PORTB4 POSITIVO LADO IZK;IERDOBCF PORTA3 NEGATIVO LADO IZK;IERDOBSF PORTA9 POSITIVO LADO DERECOBCF PORTA4 NEGATIVO LADO DERECOCALL RETARDOBSF PORTB2 VELOCIDAD LADO IZK;IERDOBCF PORTB3 VELOCIDAD LADO DERECOBSF PORTB4 POSITIVO LADO IZK;IERDOBCF PORTA3 NEGATIVO LADO IZK;IERDO
BCF PORTA9 POSITIVO LADO DERECOBCF PORTA4 NEGATIVO LADO DERECOCALL RETARDODECFSZ N;M3,GOTO DERECAGOTO SALE
IZK;IERDAMOVL D1MOVF N;M3
IZK;IERDABCF PORTB2 VELOCIDAD LADO IZK;IERDOBSF PORTB3 VELOCIDAD LADO DERECO
BSF PORTB4 POSITIVO LADO IZK;IERDOBCF PORTA3 NEGATIVO LADO IZK;IERDOBSF PORTA9 POSITIVO LADO DERECOBCF PORTA4 NEGATIVO LADO DERECOCALL RETARDOBCF PORTB2 VELOCIDAD LADO IZK;IERDOBSF PORTB3 VELOCIDAD LADO DERECOBCF PORTB4 POSITIVO LADO IZK;IERDOBCF PORTA3 NEGATIVO LADO IZK;IERDOBSF PORTA9 POSITIVO LADO DERECOBCF PORTA4 NEGATIVO LADO DERECOCALL RETARDODECFSZ N;M3,GOTO IZK;IERDA
-
7/25/2019 robot rescatista
145/150
SALE
===========================================================================================================================
BTFSS PORTB0 PREG;NTA POR EL CENSOR IZK;IERDOGOTO IZK;IERDAPBTFSS PORTB1 PREG;NTA POR EL CENSORDERECOGOTO DERECAPBTFSC PORTB, PREG;NTA POR EL CENSOR DE DISTANCIACENTRALGOTO CENTROBTFSC PORTB9 PREG;NTA POR EL CENSOR DE DISTANCIAIZK;IERDOGOTO IZK;IERDABTFSC PORTB/ PREG;NTA POR EL CENSOR DE DISTANCIADERECOGOTO DERECABTFSS N;M19 PREG;NTA POR EL ;LTIMO CENSOR K;EDETECTOGOTO IZK;IERDAR
DERECARBSF PORTB2 VELOCIDAD LADO IZK;IERDO
BSF PORTB3 VELOCIDAD LADO DERECOBSF PORTB4 POSITIVO LADO IZK;IERDOBCF PORTA3 NEGATIVO LADO IZK;IERDOBCF PORTA9 POSITIVO LADO DERECOBSF PORTA4 NEGATIVO LADO DERECOGOTO SALE
IZK;IERDARBSFBSF
PORTB2PORTB3
VELOCIDAD LADOIZK;IERDO
BCF PORTB4 POSITIVO LADOBS
PORTA3PORTA9
NEGATIVO LADOIZK;IERDO
BCF PORTA4 NEGATIVO LADOGO SAL
IZK;IERDABTFSC PORTB/ PREG;NTA POR EL CENSOR DE DISTANCIADERECOGOTO CENTROCBCF N;M19BCF PORTB2 VELOCIDAD LADO IZK;IERDOBCF PORTB3 VELOCIDAD LADO DERECOBCF PORTB4 POSITIVO LADO IZK;IERDOBCF PORTA3 NEGATIVO LADO IZK;IERDOBSF PORTA9 POSITIVO LADO DERECOBCF PORTA4 NEGATIVO LADO DERECOGOTO SALE
DERECA
BTFSC PORTB9 PREG;NTA POR EL CENSOR DE DISTANCIAIZK;IERDOGOTO CENTROCBSF N;M19BCF PORTB2 VELOCIDAD LADO IZK;IERDOBCF PORTB3 VELOCIDAD LADO DERECOBSF PORTB4 POSITIVO LADO IZK;IERDOBCF PORTA3 NEGATIVO LADO IZK;IERDOBCF PORTA9 POSITIVO LADO DERECOBCF PORTA4 NEGATIVO LADO DERECOGOTO SALE
CENTROCBTFSC PORTB, PREG;NTA POR EL CENSOR DE DISTANCIACENTRALGOTO CENTROBCF PORTB2 VELOCIDAD LADO IZK;IERDO
-
7/25/2019 robot rescatista
146/150
BCF PORTB3 VELOCIDAD LADOBSF PORTB4 POSITIVO LADO IZK;IERDOBCF PORTA3 NEGATIVO LADOBSF PORTA9 POSITIVO LADO DERECOBCF PORTA4 NEGATIVO LADO DERECO
GOTO SA
CENTBSF PORTB2 VELOCIDAD LADOBS
PORTB3PORTB4
VELOCIDAD LADODERECO
BCF PORTA3 NEGATIVO LADOBSF PORTA9 POSITIVO LADO DERECOBCFGOT SA
PORTA4 NEGATIVO LADO DERECO
IZK;IERDAPBTFSC PORTB1 PREG;NTA POR EL CENSOR DE PISO
DERECOGOTO REVERSABSF PORTB2 VELOCIDAD LADO IZK;IERDOBCF PORTB3 VELOCIDAD LADO DERECOBCF PORTB4 POSITIVO LADO IZK;IERDOBSF PORTA3 NEGATIVO LADO IZK;IERDOBCF PORTA9 POSITIVO LADO DERECOBSF PORTA4 NEGATIVO LADO DERECOMOVL D0MOVF N;M2CALL RETARDOBCF PORTB2 VELOCIDAD LADO IZK;IERDOBCF PORTB3 VELOCIDAD LADO DERECOBCF PORTB4 POSITIVO LADO IZK;IERDOBCF PORTA3 NEGATIVO LADO IZK;IERDOBCF PORTA9 POSITIVO LADO DERECO
BCF PORTA4 NEGATIVO LADO DERECOMOVL D/MOVF N;M2CALL RETARDOGOTO SALE
DERECAPBTFSC PORTB0 PREG;NTA POR EL CENSOR DE PISOIZK;IERDOGOTO REVERSABCF PORTB2 VELOCIDAD LADO IZK;IERDOBSF PORTB3 VELOCIDAD LADO DERECOBCF PORTB4 POSITIVO LADO IZK;IERDOBSF PORTA3 NEGATIVO LADO IZK;IERDOBCF PORTA9 POSITIVO LADO DERECOBSF PORTA4 NEGATIVO LADO DERECO
MOVL D0MOVF N;M2CALL RETARDOBCF PORTB2 VELOCIDAD LADO IZK;IERDOBCF PORTB3 VELOCIDAD LADO DERECOBCF PORTB4 POSITIVO LADO IZK;IERDOBCF PORTA3 NEGATIVO LADO IZK;IERDOBCF PORTA9 POSITIVO LADO DERECOBCF PORTA4 NEGATIVO LADO DERECOMOVL D/MOVF N;M2CALL RETARDOGOTO SALE
-
7/25/2019 robot rescatista
147/150
-
7/25/2019 robot rescatista
148/150
ANE%O IV
OAS DE CARACTERSTICAS DE LOS COMPONENTES ELECTRNICOS
PIC /2F2-HA2-A
Circ!ito Inte=ra4o CD0./.2
Circ!ito Inte=ra4o L#H0/
Circ!ito Inte=ra4o L-D
Nota@
Para re7erirse a "as caracter$sticas e"+ctricas 4e c!a";!iera 4e "os co6onentes e"ectrnicos
enciona4os anteriorente8 s$r&ase re&isar "a 5o9a 4e 4atos 4e" co6onente 4esea4o8 e"
c!a" es eiti4o 6or e" 7a3ricante(
-
7/25/2019 robot rescatista
149/150
TECNOLOGICO NACIONAL DE MEXICOINSTITUTO TECNOLOGICO DE
//
BIBLIOGRA!A
REFERENCIAS BIBLIOGRAFAS
/ An:"isis < 4iseo 4e circ!itos e"ectrnicos8 Dona"4 A( Neaen8 Too II8 #c Grai""8 /H8 //H2 6:=(
- A!toCAD -.. A&an%a4o8 *( L6e% Fern:n4e%8 *(A( Ta9a4!ra _a6irain8 #c Grai""8 -..8 H. 6:=(
Diseo 4e e"eentos 4e :;!inas8 Ro3ert L( #ott8 0`( E4icin8 Pearson8 Prenticea""8 -..28 6:=(
0 Diseo 4e ecanisos8 an:"isis < s$ntesis8 Art5!r G( Er4an8 Geor=e N( San4or8 `(E4icin8 Prentice a"" /8 20H 6:=(
1 Diseo e"ectrnico circ!itos < sisteas8 C(*( Sa&ant *r(8 #artin S( Ro4en8 Gor4on L(Car6enter8 `( E4icin8 Prentice a""8 -...8 6:=(
2 E"ectrnica 4e 6otencia8 Circ!itos8 Dis6ositi&os < A6"icaciones8 #!5aa4 (
Ras5i48 `( E4icin8 Prentice a""8 -..08 .(
H Inter6retacin 4e 4i3!9o ec:nico8 S5ri&er L( Coo&er8 *a< D( e"se"8 #c Grai""8/8 //. 6:=(
#an!a" 4e 7r!"as t+cnicas8 W!rt Giec8 Reiner Giec8 /`( E4icin8 A"7aoe=a8-..H(
#icrocontro"a4ores 7!n4aentos < a6"icaciones8 Fernan4o E( a"4+s P+re%8 RanPa"":s Aren
-
7/25/2019 robot rescatista
150/150
/EBGRA!A
5tt6'(sc(e5!(ess3e37isicaso"i4o4inrotacioninerciainercia(5t
5tt6'(sc(e5!(ess3e37isica!ni4a4essi3o"ossi3o"os/(5t
5tt6'(neaco(co(,4escri6cion(656bi4cate=oria0/
5tt6'(a"!ac(co(,6ro4a"!inio(5t"
5tt6'(s7(cos76ro4!ctcata"o=!e9s6&ieers6ro4!ctTa3"eieer(9s6b6resentationT