Segundo Sumario de An lisis y S ntesis de Mecanismos: M todos Gr ficos de An lisis de ...¡lisis...
24
Segundo Sumario de An´ alisis y S´ ıntesis de Mecanismos: M´ etodos Gr´ aficos de An´ alisis de Mecanismos: Pol´ ıgonos de Velocidad y Aceleraci´ on, Centros Instantaneos de Velocidad. Jos´ e Mar´ ıa Rico Mart´ ınez. [email protected] Departamento de Ingenier´ ıa Mec´ anica Divisi´ on de Ingenier´ ıas, Campus Irapuato-Salamanca. Universidad de Guanajuato.
Transcript of Segundo Sumario de An lisis y S ntesis de Mecanismos: M todos Gr ficos de An lisis de ...¡lisis...
Segundo Sumario de Analisis y Sıntesis de Mecanismos:Metodos Graficos de Analisis de Mecanismos: Polıgonos
de Velocidad y Aceleracion, Centros Instantaneos deVelocidad.
Jose Marıa Rico Mart ı[email protected]
Departamento de Ingenierıa MecanicaDivision de Ingenierıas, Campus Irapuato-Salamanca.
Universidad de Guanajuato.
Contenido
1 Introduccion y Motivacion.
2 Metodo del Polıgono de Velocidad y Aceleracion.
3 Centros Instantaneos de Velocidad: Definiciones y Notacion.
4 Centros Instantaneos de Velocidad: Localizacion.
5 El Teorema de Aronhold Kennedy.
Introduccion y Motivacion.
Desde finales del siglo XIX hasta mediados del siglo XX, la ausencia deherramientas de computo obligo al desarrollo de metodos graficos de analisiscinematico de mecanismos. Estos metodos son, ahora, mas tediosos y menosexactos que aquellos metodos basados en el empleo de computadorasdigitales; sin embargo es importante conocer estos metodos porque:
1 El metodo de los polıgonos de velocidad y aceleracion permite mostrarlas tres fases de un analisis cinematico completo que incluye el analisisde posicion, velocidad y aceleracion de un mecanismo plano.
2 El metodo de los centros instantaneos de velocidad proporciona unavision, al mismo tiempo, practica y altamente reveladora, delcomportamiento de los mecanismos, que tiene aplicacion en lacinematica espacial y la cinematica de engranages.
Contenido
1 Introduccion y Motivacion.
2 Metodo del Polıgono de Velocidad y Aceleracion.
3 Centros Instantaneos de Velocidad: Definiciones y Notacion.
4 Centros Instantaneos de Velocidad: Localizacion.
5 El Teorema de Aronhold Kennedy.
Metodo del Polıgono de Velocidad y Aceleracion.
El metodo del polıgono de velocidad y aceleracion consiste en la solucion del
1 Analisis de posicion,
2 Analisis de velocidad, y
3 Analisis de aceleracion
de un mecanismo plano mediante metodos graficos, que involucran laseleccion de una escala y de un origen para llevar a cabo estos analisis.
El analisis de posicion realizado en esta seccion representa el primer metodode solucion del analisis de posicion que se presentara en este curso.
Analisis de Posicion.
1 El analisis de posicion de un mecanismo plano consiste en realizar undibujo, usualmente a escala, que represente fielmente la posicion de cadauno de los eslabones del mecanismo.
2 El analisis de posicion de un mecanismo plano resuelve de maneragrafica las ecuaciones escalares de clausura obtenidas en ladeterminacion de los grados de libertad del mecanismo mediante elcriterio de Paul.
3 La solucion algebraica de esas ecuaciones es relativamente compleja; sinembargo, graficamente, su solucion requiere simplemente trazar lıneas, eintersectar lıneas rectas con cırculos o intersectar dos cırculos
Analisis de Velocidad.1 El analisis de velocidad de un mecanismo plano consiste en realizar un
dibujo, usualmente a escala y seleccionando un origen, usualmentedenotadoOv, que represente la solucion de las ecuaciones que, en laUDA de Dinamica del Cuerpo Rıgido, se resolvieron por metodosalgebraicos. Ese dibujo se convierte en un polıgono conocido comoPolıgono de Velocidad.
2 Cada punto de cada eslabon, digamosB, del mecanismo tiene una“imagen”, denotada porb, en el polıgono de velocidad. El vector que vadel origenOv al puntob, es la velocidad del puntoB del mecanismo. EnparticularOv es la imagen de todos los puntos del mecanismo cuyavelocidad es igual a~0.
3 De manera semejante, cada eslabon del mecanismo tiene una “imagen”en el polıgono de velocidad. La imagen del eslabon esta girada 90◦ en elsentido de la velocidad angular del eslabon.
Analisis de Aceleracion.1 El analisis de aceleracion de un mecanismo plano consiste en realizar un
dibujo, usualmente a escala y seleccionando un origen, usualmentedenotadoOa, que represente la solucion de las ecuaciones que, en laUDA de Dinamica del Cuerpo Rıgido, se resolvieron por metodosalgebraicos. Ese dibujo se convierte en un polıgono conocido comoPolıgono de Aceleracion.
2 Cada punto de cada eslabon, digamosB, del mecanismo tiene una“imagen”, denotada porb, en el polıgono de aceleracion. El vector queva del origenOa al puntob, es la aceleracion del puntoB del mecanismo.En particularOa es la imagen de todos los puntos del mecanismo cuyaaceleracion es igual a~0.
3 De manera semejante, cada eslabon del mecanismo tiene una “imagen”en el polıgono de aceleracion. La imagen del eslabon esta girada 180◦
menos unangulo que depende de la velocidad y aceleracion angular.
Contenido
1 Introduccion y Motivacion.
2 Metodo del Polıgono de Velocidad y Aceleracion.
3 Centros Instantaneos de Velocidad: Definiciones y Notacion.
4 Centros Instantaneos de Velocidad: Localizacion.
5 El Teorema de Aronhold Kennedy.
Centros Instantaneos de Velocidad: Definicion.Definicion 1. Considere tres cuerpos rıgidos denominados comoi, j, k yconsidere el movimiento relativo de los cuerpos rıgidosi y j respecto delcuerpo rıgido k, entonces elcentro instantaneo de velocidad, delmovimiento relativo, entre los eslabonesi y j, denotadoOij = Oji, se define delas siguientes tres maneras:1. El centro instantaneoOij es una pareja de puntos coincidentes,pertenecientes uno al cuerpoi, Oi y otro al cuerpoj, Oj, tal que uno de loseslabones gira respecto al otro, respecto a un eje perpendicular al plano depapel que pasa por el puntoOij.2. El centro instantaneoOij es una pareja de puntos coincidentes,pertenecientes uno al cuerpoi y otro al cuerpoj, tal que no tienen velocidadrelativa; es decir:
k~vOi/Oj= ~0
3. El centro instantaneoOij es una pareja de puntos coincidentes,pertenecien-tes uno al cuerpoi y otro al cuerpoj, tal que tienen la mismavelocidad; es decir:
k~vOi =k~vOj
Centros Instantaneos de Velocidad: Notacion.
Notacion.
1 Debe notarse que las tres definiciones son simetricas, de manera queOij = Oji.
2 Por otro lado, se preferira escribirOij dondei > j.
3 Ademas, es perfectamente posible que el centro instantaneoOij estefuera de los lımites fısicos de los cuerpos, de manera que se supondraque los cuerpos rıgidos tienen dimensiones infinitas.
4 Es costumbre numerar los eslabones de un mecanismo a partir delnumero 1 que, tambien es costumbre, se reserva para el eslabon fijo.
Proposicion 2. Las tres posibles definiciones de un centro instantaneo sonequivalentes.
Contenido
1 Introduccion y Motivacion.
2 Metodo del Polıgono de Velocidad y Aceleracion.
3 Centros Instantaneos de Velocidad: Definiciones y Notacion.
4 Centros Instantaneos de Velocidad: Localizacion.
5 El Teorema de Aronhold Kennedy.
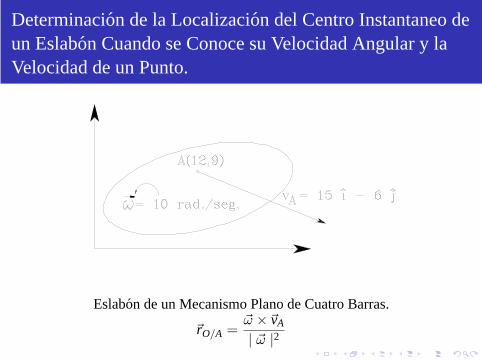
Determinacion de la Localizacion del Centro Instantaneo deun Eslabon Cuando se Conoce su Velocidad Angular y laVelocidad de un Punto.
Eslabon de un Mecanismo Plano de Cuatro Barras.
~rO/A =~ω ×~vA
| ~ω |2
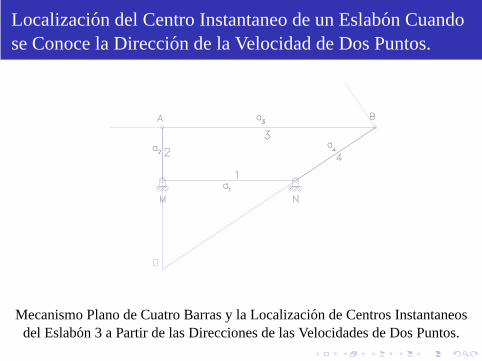
Localizacion del Centro Instantaneo de un Eslabon Cuandose Conoce la Direccion de la Velocidad de Dos Puntos.
Mecanismo Plano de Cuatro Barras y la Localizacion de Centros Instantaneosdel Eslabon 3 a Partir de las Direcciones de las Velocidades de Dos Puntos.
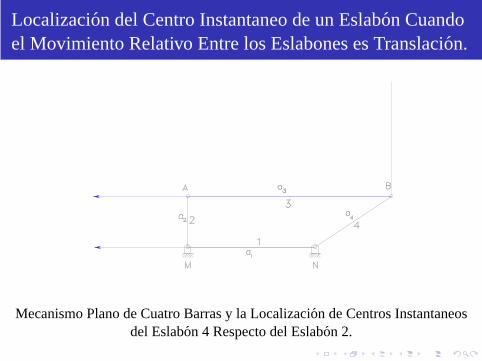
Localizacion del Centro Instantaneo de un Eslabon Cuandoel Movimiento Relativo Entre los Eslabones es Translacion.
Mecanismo Plano de Cuatro Barras y la Localizacion de Centros Instantaneosdel Eslabon 4 Respecto del Eslabon 2.
Centros Instantaneos de Velocidad: Clasificacion.
Los centros instantaneos de velocidad de los diferentes pares de eslabones deun mecanismo plano pueden clasificarse en base a diferentes criterios.
1 Dependiendo si la localizacion del centro instantaneo pertenece fijorespecto al eslabon, o cuerpo rıgido seleccionado como referencia, fijo obase.
Centros de velocidad permanentes. Si la localizacion del centroinstantaneo respecto a la pareja de eslabones permanece fija.Centros de velocidad instantaneos. Si la localizacion del centroinstantaneo, respecto a la pareja de eslabones, cambia durante elmovimiento del mecanismo.
2 Dependiendo si la localizacion del centro instantaneo puede realizarsemediante la simple definicion de un centro instantaneo,primario, orequiere la aplicacion de metodos mas elaborados como el teorema deAronhold Kennedy,secundario.
3 Dependiendo si uno de los eslabones involucrados es el eslabon fijo,absolutos, o no,relativos.
Contenido
1 Introduccion y Motivacion.
2 Metodo del Polıgono de Velocidad y Aceleracion.
3 Centros Instantaneos de Velocidad: Definiciones y Notacion.
4 Centros Instantaneos de Velocidad: Localizacion.
5 El Teorema de Aronhold Kennedy.
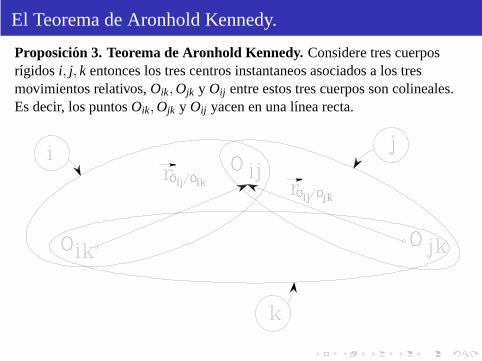
El Teorema de Aronhold Kennedy.
Proposicion 3. Teorema de Aronhold Kennedy.Considere tres cuerposrıgidosi, j, k entonces los tres centros instantaneos asociados a los tresmovimientos relativos,Oik,Ojk y Oij entre estos tres cuerpos son colineales.Es decir, los puntosOik,Ojk y Oij yacen en una lınea recta.
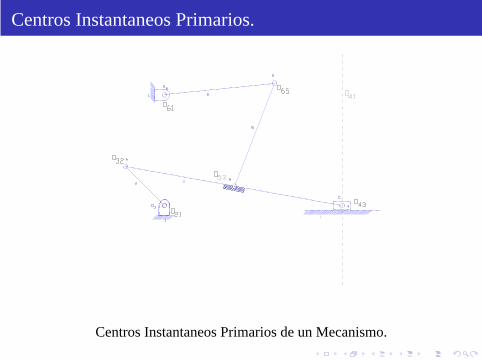
Centros Instantaneos Primarios.
Centros Instantaneos Primarios de un Mecanismo.
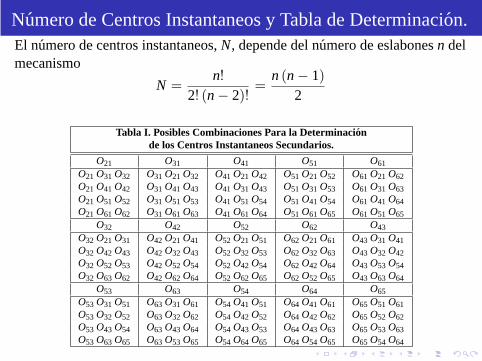
Numero de Centros Instantaneos y Tabla de Determinacion.El numero de centros instantaneos,N, depende del numero de eslabonesn delmecanismo
N =n!
2! (n − 2)!=
n (n − 1)2
Tabla I. Posibles Combinaciones Para la Determinacionde los Centros Instantaneos Secundarios.
O21 O31 O41 O51 O61
O21 O31 O32 O31 O21 O32 O41 O21 O42 O51 O21 O52 O61 O21 O62O21 O41 O42 O31 O41 O43 O41 O31 O43 O51 O31 O53 O61 O31 O63O21 O51 O52 O31 O51 O53 O41 O51 O54 O51 O41 O54 O61 O41 O64O21 O61 O62 O31 O61 O63 O41 O61 O64 O51 O61 O65 O61 O51 O65
O32 O42 O52 O62 O43
O32 O21 O31 O42 O21 O41 O52 O21 O51 O62 O21 O61 O43 O31 O41O32 O42 O43 O42 O32 O43 O52 O32 O53 O62 O32 O63 O43 O32 O42O32 O52 O53 O42 O52 O54 O52 O42 O54 O62 O42 O64 O43 O53 O54O32 O63 O62 O42 O62 O64 O52 O62 O65 O62 O52 O65 O43 O63 O64
O53 O63 O54 O64 O65
O53 O31 O51 O63 O31 O61 O54 O41 O51 O64 O41 O61 O65 O51 O61O53 O32 O52 O63 O32 O62 O54 O42 O52 O64 O42 O62 O65 O52 O62O53 O43 O54 O63 O43 O64 O54 O43 O53 O64 O43 O63 O65 O53 O63O53 O63 O65 O63 O53 O65 O54 O64 O65 O64 O54 O65 O65 O54 O64
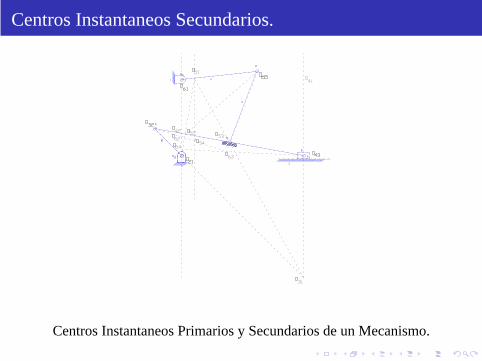
Centros Instantaneos Secundarios.
Centros Instantaneos Primarios y Secundarios de un Mecanismo.
Aplicacion de Centros Instantaneos: Metodo Directo I.
1 Para aplicar el metodo directo es necesario localizar los tres centrosinstantaneos asociados a tres eslabones: El eslabon fijo 1, el eslabonmotriz 2 y el eslabon de interesj.
O21 Oj1 Oj2,
y de acuerdo con el teorema de Aronhold-Kennedy deben ser colineales;es decir, estan localizados a lo largo de una lınea recta.
2 La aplicacion del metodo directo parte de la definicion del centroinstantaneo de velocidad relativo,Oj2. De la propia definicion, se tieneque
1~v 2Oj2
= 1~v jOj2
(1)
Aplicacion de Centros Instantaneos: Metodo Directo II.
El eslabon j esta sujeto a movimiento plano general.La ecuacion (1) puedeescribirse como
~ω2 ×~rOj2/O21= 1~v 2
Oj2= 1~v j
Oj2= 1~v j
Oj1+ ~ωj ×~rOj2/Oj1
Sin embargo, de la propia definicion de un centro instantaneo de velocidadabsoluto, se tiene que
1~v jOj1
= ~0
Por lo tanto,~ω2 ×~rOj2/O21
= ~ωj ×~rOj2/Oj1. (2)
La solucion de esta ecuacion conduce a la determinacion de la velocidadangular~ωj.
Aplicacion de Centros Instantaneos: Metodo Directo III.El eslabon j esta sujeto a rotacion alrededor de un eje fijo., La ecuacion (1)puede escribirse como
~ω2 ×~rOj2/O21= 1~v 2
Oj2= 1~v j
Oj2= ~ωj ×~rOj2/Oj1
. (3)
La solucion de esta ecuacion conduce a la determinacion de la velocidadangular~ωj.
El eslabon j esta sujeto a traslacion. El eslabon j no tiene velocidad angular;~ωj = ~0 y todos los puntos del cuerpoj tienen la misma velocidad.Considerado el puntoOj2, se tiene que la ecuacion (1) puede escribirse como
1~v jOj2
= 1~v 2Oj2
= ~ω2 ×~rOj2/O21(4)
La solucion de esta ecuacion conduce a la determinacion de la velocidad delpuntoOj2 y, por lo tanto, a la determinacion de la velocidad de cualquiera delas partıculas del eslabon j.