
Sensores de fuerza
18
Instituto Politécnico Nacional Centro de Investigación en Ciencia Aplicada y Tecnología Avanzada Unidad Querétaro Sensores de fuerza Ing.Aguirre Nájera Adán Enrique 24 de marzo de 2015
-
Upload
adan-aguirre -
Category
Education
-
view
112 -
download
0
Transcript of Sensores de fuerza
Instituto Politécnico Nacional
Centro de Investigación en Ciencia Aplicada y Tecnología Avanzada
Unidad Querétaro
Sensores de fuerza
Ing.Aguirre Nájera Adán Enrique
24 de marzo de 2015

Fuerza
La vida es manifestada por el cambio y movimiento, esto involucra acciones e interacciones de una variedad de fuerzas. Por lo tanto, ninguna medida es más fundamental para la actividad humana que la medición de la fuerza en sus muchas manifestaciones, incluyendo peso, presión, aceleración, torque, trabajo y energía.
La fuerza es el agente de cambio. En mecánica, es aquello que cambia la velocidad de un objeto. La fuerza es una cantidad vectorial, que tiene magnitud y dirección. Newton resumió su entendimiento del movimiento en tres leyes.
1) Ley de la inercia:Un objeto en reposo permanecerá en reposo; un objeto en movimiento seguirá moviéndose con velocidad constante, excepto en cuanto recibe la acción de una fuerza externa. La fuerza es lo que cambia el movimiento.
2) Ley de la aceleración:Si la fuerza resultante (neta) F⃗que actúa sobre un objeto de masa m no es cero, el objeto se acelerará en la dirección de la fuerza. La aceleración a⃗ es proporcional a la fuerza e inversamente proporcional a la masa del objeto.
a⃗= F⃗m
o F⃗=m a⃗
1) Ley de acción y reacción:La materia interactúa con la materia; las fuerzas se presentan en pares. Por cada fuerza que actúa sobre un cuerpo, existe otra igual, pero en sentido opuesto, actuando sobre algún otro cuerpo.
Una de las limitaciones básicas de toda medición en la ciencia o metrología, es que todas las mediciones son relativas. Por lo tanto, todos los sensores contienen un punto de referencia al cual la cantidad que se ha medido debe ser comparada.
La romana (o steelyard en inglés) fue uno de los primeros sensores relativos de la humanidad, fue inventado para realizar mediciones de peso (Fig.1)

Figura 1. Balanza romanaLa precisión de la medida del peso depende de las precisión del contra peso y de la exactitud de donde se ha posicionado.
Esfuerzo y deformación
Una consideración importante que se debe de tener en las mediciones relacionadas con la fuerza es la eliminación de las componentes de fuerza no relacionadas con la medida que se busca.
Cuando fuerzas externas son aplicadas a objetos estacionarios, como resultado obtenemos esfuerzos y deformaciones.
a) b)Figura 2. a) Esfuerzo b) Deformación
Esfuerzo (σ ) es definido como la fuerza (F) por unidad de área (A), donde la fuerza es perpendicular al área donde se aplica y se considera uniformemente distribuida sobre el área. Esta es representada por:
σ= FA
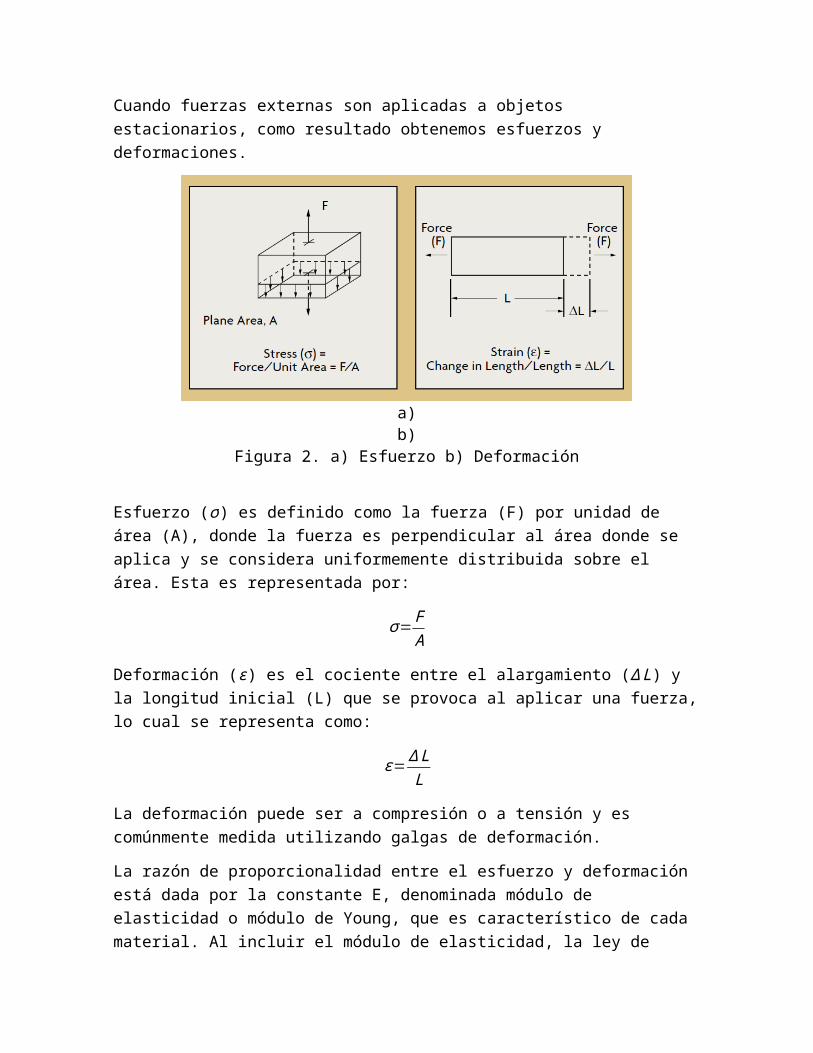
Deformación (ε) es el cociente entre el alargamiento (∆ L) y la longitud inicial (L) que se provoca al aplicar una fuerza, lo cual se representa como:
ε=∆ LL
La deformación puede ser a compresión o a tensión y es comúnmente medida utilizando galgas de deformación.
La razón de proporcionalidad entre el esfuerzo y deformación está dada por la constante E, denominada módulo de elasticidad o módulo de Young, que es característico de cada material. Al incluir el módulo de elasticidad, la ley de Hooke se convierte en una ecuación importante y útil, que se expresa como:
σ=Eε
Donde:
σ = Esfuerzo unitario
ε = Deformación unitaria
E = Modulo de elasticidad
Siempre que un cuerpo se somete a la acción de una fuerza, se deformara en la dirección de la fuerza. Sin embargo, siempre que se producen deformaciones en la dirección de la fuerza aplicada, también se producen deformaciones laterales. Las deformaciones laterales que se producen tienen una relación constante con las deformaciones axiales.
Figura 3. Deformación de PoissonMientras que el material se mantenga dentro del rango elástico de esfuerzos, la siguiente relación es constante
v=deformacionlateraldeformacionaxial
=(∆ DD )/(∆ LL )

Fundamentalmente todas las galgas de deformación son diseñadas para convertir movimiento mecánico en señal eléctrica. Un cambio en su capacitancia, inductancia o resistencia es proporcional a la deformación experimentada por el sensor. Una galga ideal cambiara su resistencia solamente debido a la deformación de la superficie a la que está sujeta. Sin embargo, en aplicaciones reales la temperatura, propiedades del material, adhesivos, estabilidad de los metales afectan la medición de la galga.
La deformación de un objeto puede ser medida por medios mecánicos, ópticos, hidráulicos, neumáticos y eléctricos. Las primeras galgas eran dispositivos mecánicos que median el cambio de la longitud y comparándola con la longitud original, sin embargo estos tenían baja resolución y eran voluminosos y difíciles de utilizar. Los sensores ópticos son sensibles y precisos, pero son delicados y no muy populares en aplicaciones industriales. Son principalmente utilizados en condiciones de laboratorio.
Galgas de deformación
La característica más utilizada que varía en proporción a la deformación es la resistividad eléctrica. Aunque galgas basadas en capacitancia e inductancia han sido desarrolladas, estos dispositivos son sensibles a las vibraciones y sus requerimientos de montaje y complejidad de sus circuitos han limitado su aplicación.
Una galga extensiométrica o de deformación es un sensor, para medir la deformación, presión, carga, torque, posición, entre otras cosas, que está basado en el efecto piezoresistivo, el cual es la propiedad que tienen ciertos materiales de cambiar el valor nominal de su resistencia cuando se lea somete a ciertos esfuerzos y se deforman en dirección de los ejes mecánicos. Un esfuerzo que deforma la galga producirá una variación en su resistencia eléctrica, esta variación puede ser por el cambio de longitud, el cambio originado en la sección o el cambio generado en la resistividad.
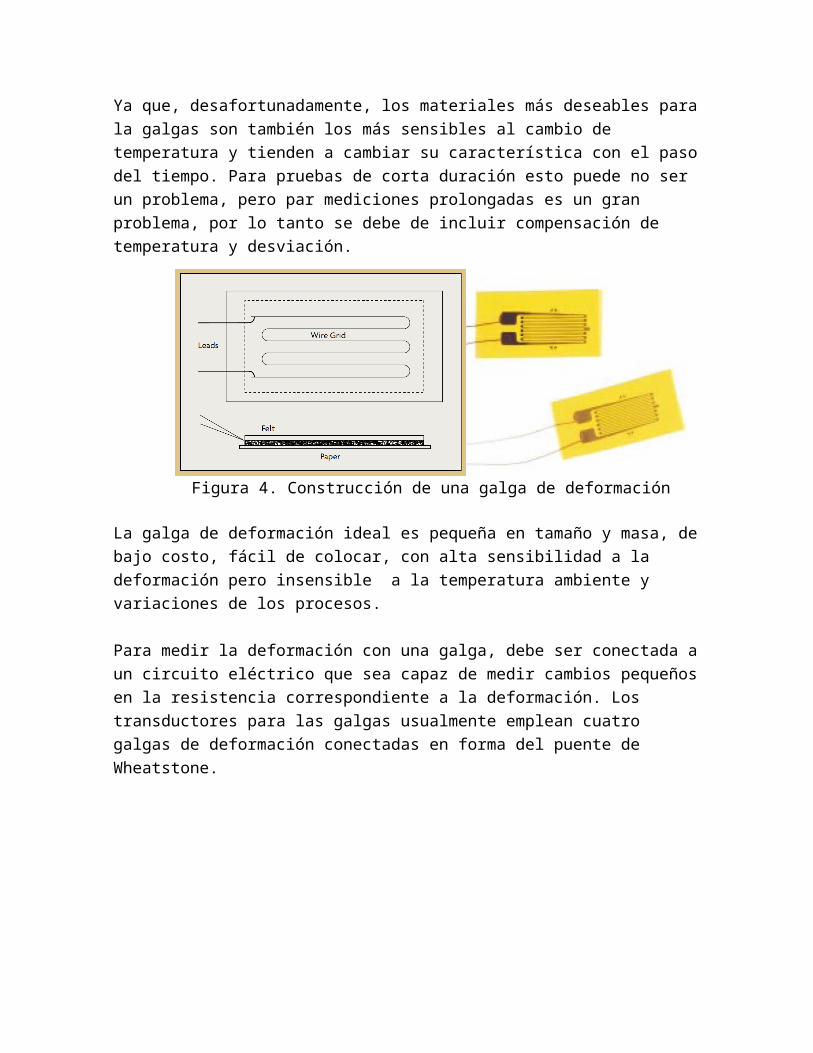
Cuando se selecciona una galga de deformación, no solamente se debe de considerar sus características de deformación, sino también su estabilidad y sensibilidad a la temperatura. Ya que, desafortunadamente, los materiales más deseables para la galgas son también los más sensibles al cambio de temperatura y tienden a cambiar su característica con el paso del tiempo. Para pruebas de corta duración esto puede no ser un problema, pero par mediciones prolongadas es un gran problema, por lo tanto se debe de incluir compensación de temperatura y desviación.

Figura 4. Construcción de una galga de deformación
La galga de deformación ideal es pequeña en tamaño y masa, de bajo costo, fácil de colocar, con alta sensibilidad a la deformación pero insensible a la temperatura ambiente y variaciones de los procesos.
Para medir la deformación con una galga, debe ser conectada a un circuito eléctrico que sea capaz de medir cambios pequeños en la resistencia correspondiente a la deformación. Los transductores para las galgas usualmente emplean cuatro galgas de deformación conectadas en forma del puente de Wheatstone.
Figura 5. Puente de Wheatstone
Esta configuración es utilizada para medir resistencia eléctrica estática o dinámica. El voltaje de salida de este puente es expresado en mili volts de salida por volts de entrada. También es adecuado para compensación de temperatura.Si R1, R2, R3, R4 son iguales y es aplicado un voltaje de entrada entre A y C, entonces no habrá diferencia de potencial entre B y D. Sin embargo, si R4 cambia a algún valor diferente de los demás el puente quedara desbalanceado y existirá un voltaje de salida en sus terminales.Cualquier pequeño cambio en la resistencia de la maya provocara un desbalance en el puente, haciéndolo adecuado para la detección de deformación. En los puentes de cuatro elementos usualmente dos galgas son alambradas para compresión y dos para tensión, dando voltaje positivo para tensión y negativo para compresión.
La salida de las galgas es voltaje muy pequeño, esto lo hace susceptible a ruido no deseado de los dispositivos eléctricos. El acoplamiento capacitivo causado por cables que se encuentran demasiada cerca de cables de AC o de altas corrientes son fuentes potenciales de error en la medición. Otro tipo de erros son los campos electromagnéticos y efectos por temperatura, la suma de todo esto puede resultar en una significativa degradación de la señal.La mayoría de los problemas de interferencias eléctricas y ruido se pueden resolver blindando y protegiendo. Un blindaje alrededor de los cables de medición interceptara las interferencias. En aplicaciones industriales, cables torcidos y blindados son utilizados casi sin excepción. Proteger el instrumento es también muy importante, se utiliza una caja de hojas metálicas el cual protege al circuito y está conectado al blindaje. Si corrientes de tierra fluyen a través de la galga y sus elementos, el puente de Wheatstone no podrá distinguir de la señal real de las parasitas.Antes de montar elementos con galgas, se debe de estar seguro de que el detector de fuerza es uniforme y homogéneo, porque deformaciones en la superficie resultara en errores de medición.La deformación aparente es un cambio en la resistencia de galga que no es causada por la deformación real. Esta es el resultado de la interacción de los coeficientes térmicos de la galga y la diferencia de expansión entre la galga y el objeto de prueba.
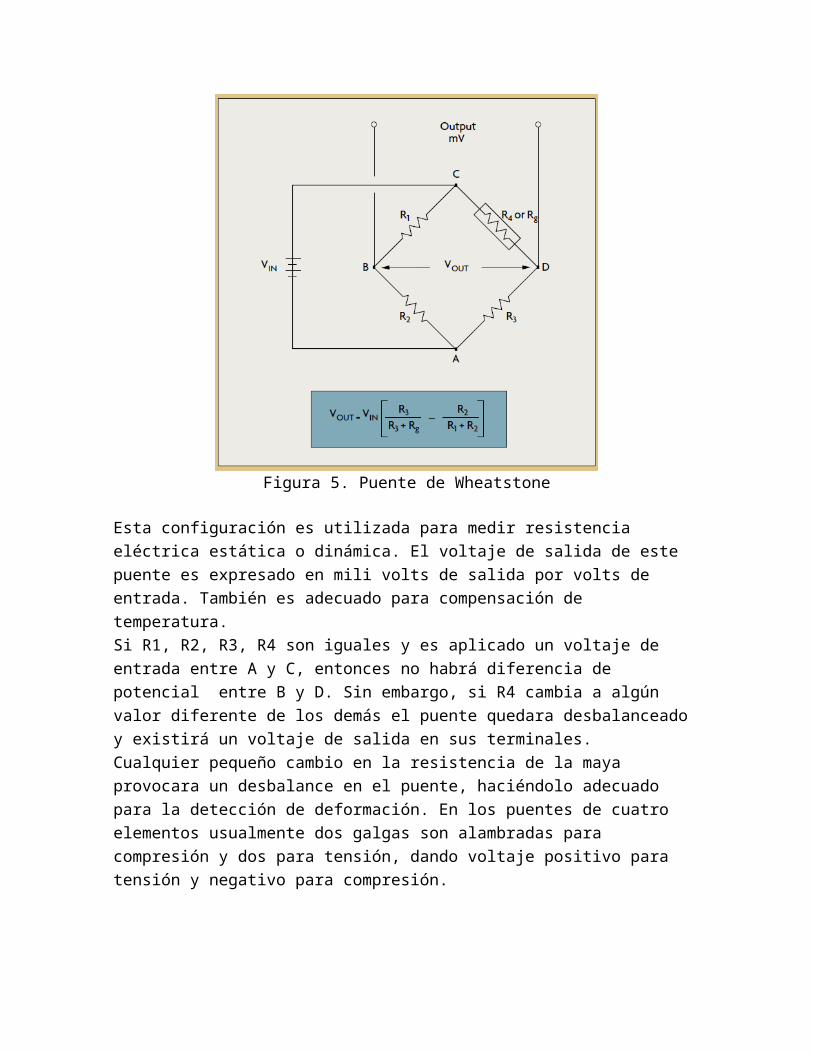
Figura 6. Variación de deformación respecto a la temperatura
Las galgas de deformación son utilizadas para medir desplazamiento, fuerza, peso, presión, torque, fuerza o carga. En la figura 7 se puede observar algunos ejemplos de su instalación y aplicación. Donde en A) se utiliza para medir fuerza vertical en B) se utiliza para fuerzas de flexión y en C y D se utiliza para medir fuerzas de presión.
Figura 7. Instalaciones alternativas de galgas
Piezoeléctricos
Además de las galgas de deformación, para la medición de fuerza también se pueden utilizar sensores piezoeléctricos. La principal diferencia entre estos es que la señal eléctrica generada por el cristal de material piezoeléctrico disminuye rápidamente después de que se le

aplico la fuerza. Esto hace que sean poco útiles para medición de fuerzas estáticas.
Se requiere almacenamiento digital para permitir el análisis de la información antes de que la señal disminuya. Dependiendo de la aplicación, se pueden medir fuerzas dinámicas a compresión, tensión y torque. Un sensor de fuerza piezoeléctrico es casi tan rígido como un pedazo de metal de igual proporción. Esta característica permite insertad los sensores directamente en estructuras de máquinas. Su rigidez los provee con una frecuencia natural alta y su rápido tiempo de subida los hacen ideales para mediciones rápidas tal como impactos metal con metal y vibraciones a altas frecuencias. Para asegurar una medición precisa, la frecuencia natural de dispositivo debe ser mucho más alta que la frecuencia a medir.
Figura 8. Diseño de elementos de sensores piezoeléctricos
Torque
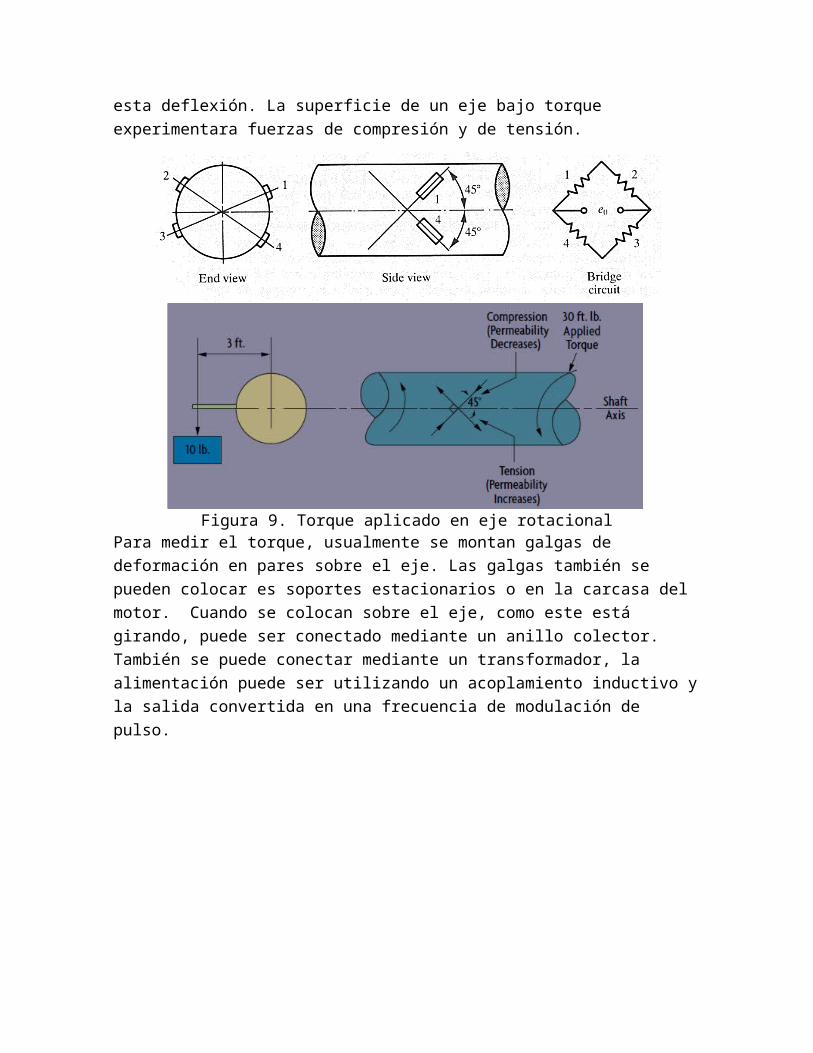
Para mediciones de torque se puede medir la deflexión del eje causado por una fuerza de torsión o detectando los efectos de esta deflexión. La superficie de un eje bajo torque experimentara fuerzas de compresión y de tensión.
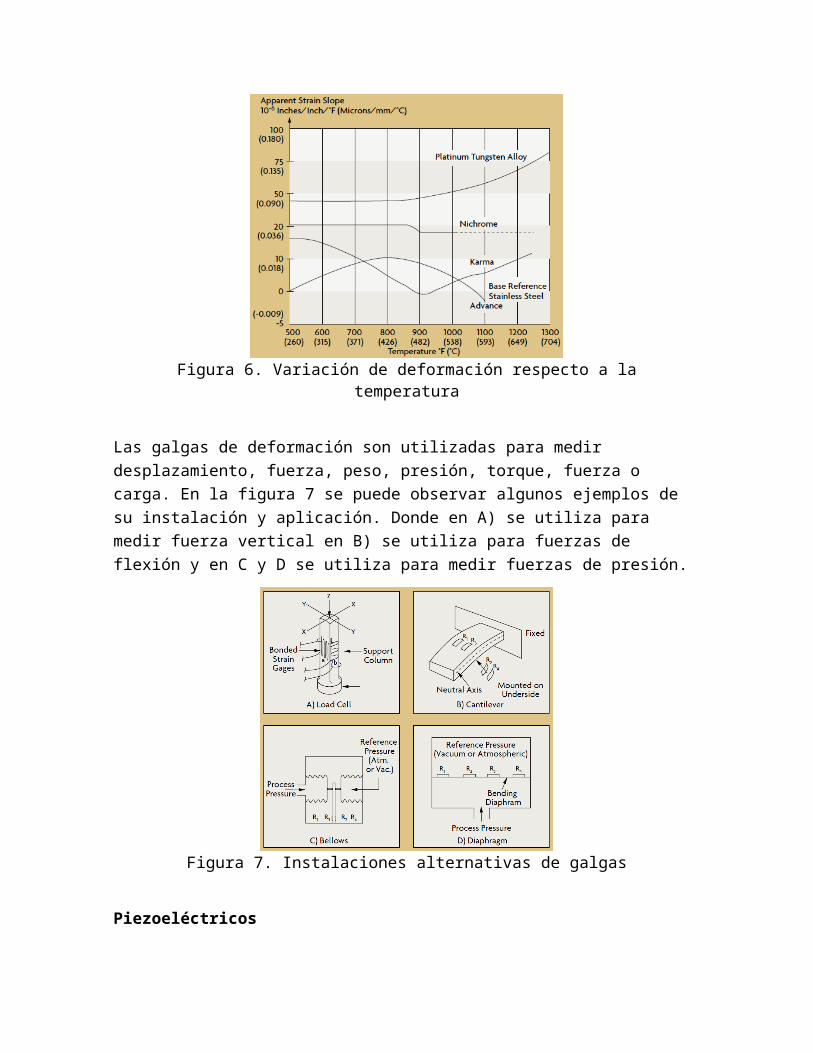
Figura 9. Torque aplicado en eje rotacionalPara medir el torque, usualmente se montan galgas de deformación en pares sobre el eje. Las galgas también se pueden colocar es soportes estacionarios o en la carcasa del motor. Cuando se colocan sobre el eje, como este está girando, puede ser conectado mediante un anillo colector. También se puede conectar mediante un transformador, la alimentación puede ser utilizando un acoplamiento inductivo y la salida convertida en una frecuencia de modulación de pulso.
Figura 10. Acoplamiento inductivo en sensores de torqueTambién existen los llamados sensores de reacción miden el torque que es transferido por el eje hacia los demás elementos. La medición final no es del todo precisa ya que no tiene en cuenta la inercia del motor. Sensores de proximidad y desplazamiento también pueden detectar torque midiendo el desplazamiento angular entre los extremos de los ejes.
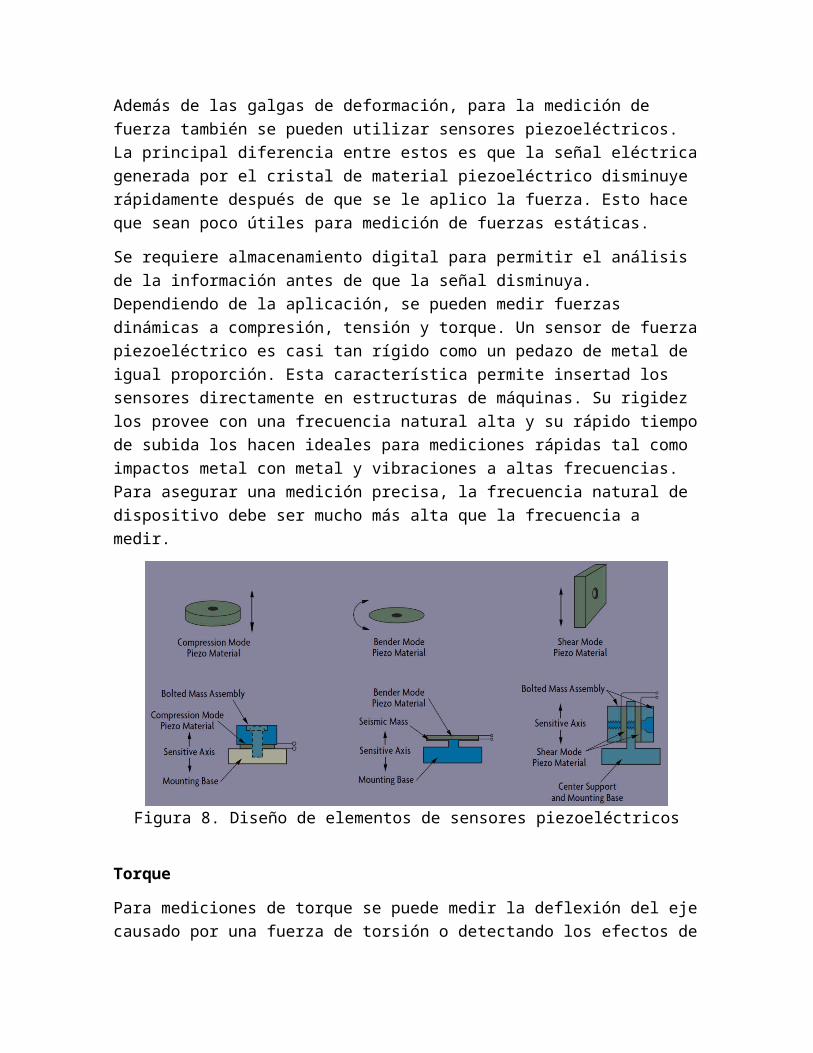
Figura 11. Celda de reacción de torque con montaje de brida
Tipos de celdas de carga
Antes de que las celdas de carga de galgas extensiometricas se convirtieran en el método convencional para aplicaciones industriales, las básculas mecánicas eran las utilizadas.
Hoy en día, a excepción de algunos laboratorios donde balanzas mecánicas de precisión son utilizadas, galgas de deformación dominan el pesaje industrial. Celdas de carga neumáticas son utilizadas en ocasiones donde la seguridad e higiene son necesarias y las celdas de carga hidráulicas son utilizadas en lugares remotos ya que estas no requieren una fuente de alimentación.
Figura 12.Comparacion entre celdas de carga
Hidráulica
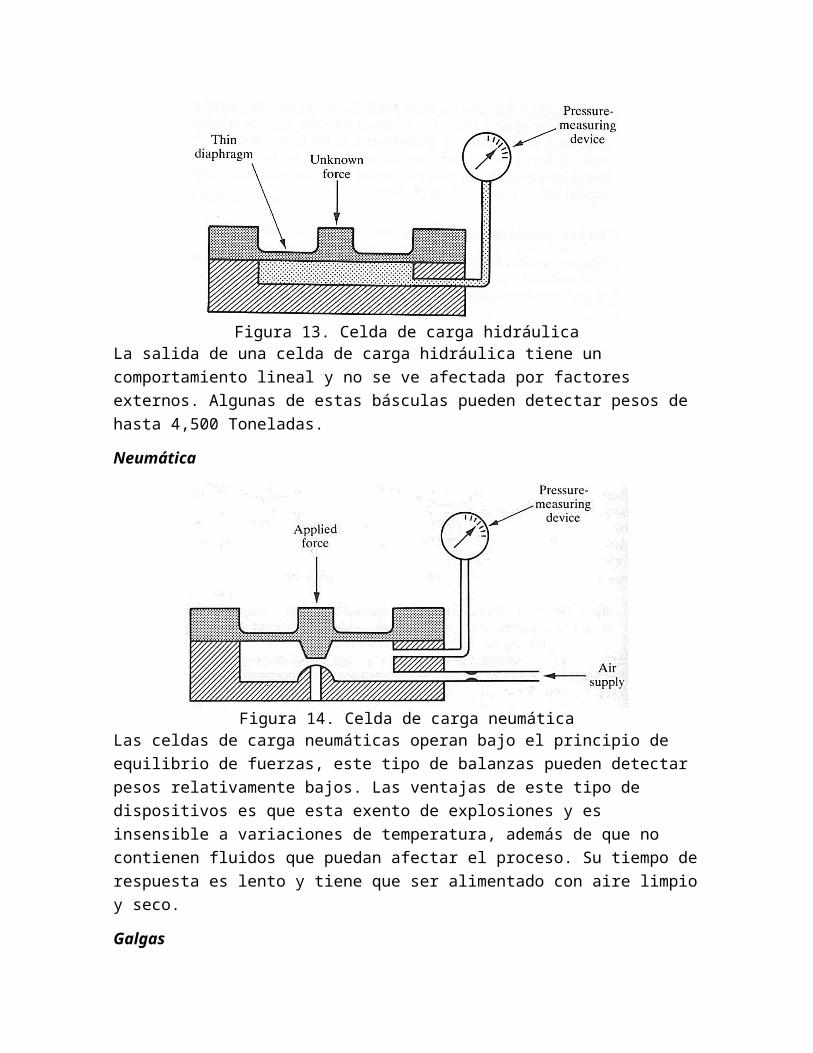
Figura 13. Celda de carga hidráulicaLa salida de una celda de carga hidráulica tiene un comportamiento lineal y no se ve afectada por factores externos. Algunas de estas básculas pueden detectar pesos de hasta 4,500 Toneladas.
Neumática
Figura 14. Celda de carga neumáticaLas celdas de carga neumáticas operan bajo el principio de equilibrio de fuerzas, este tipo de balanzas pueden detectar pesos relativamente bajos. Las ventajas de este tipo de dispositivos es que esta exento de explosiones y es insensible a variaciones de temperatura, además de que no contienen fluidos que puedan afectar el proceso. Su tiempo de respuesta es lento y tiene que ser alimentado con aire limpio y seco.
Galgas
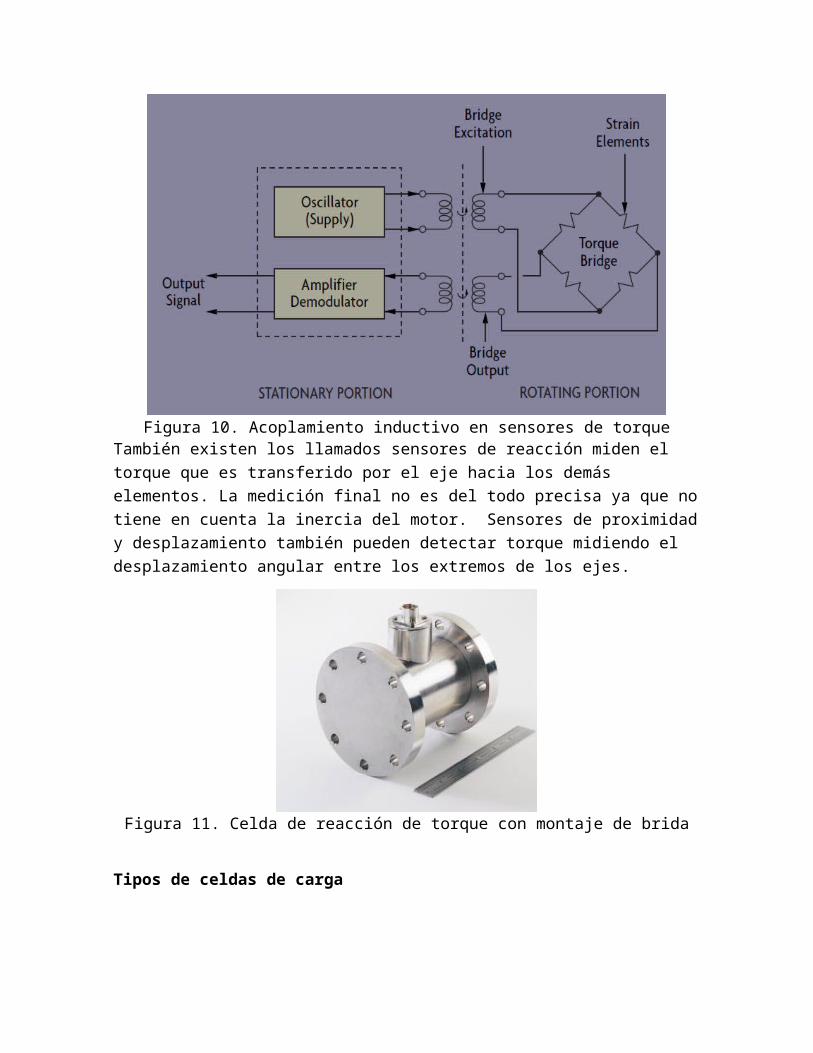
Figura 15. Celdas de carga de galgas extensiometricas
Las celdas de carga de galgas convierten las acciones de carga en señales eléctricas. Las galgas son unidas en un elemento estructural que se deforma cuando de le aplica carga. En la mayoría de los casos se utilizan cuatro galgas para obtener la máxima sensibilidad y compensadores de temperatura (Figura 15).
Figura 16.Configuración de celda de carga de galgasDebido a que este tipo de celda de carga continúa aumentando su precisión y bajando sus costos, otro tipo de celdas de carga se están dejando de utilizar. El sensor de configuración viga en flexión (bending beam) es uno de los diseños más populares por su simplicidad y bajo costo. Su configuración puede ser en viga, binocular, o anillo (Figura 17-A).
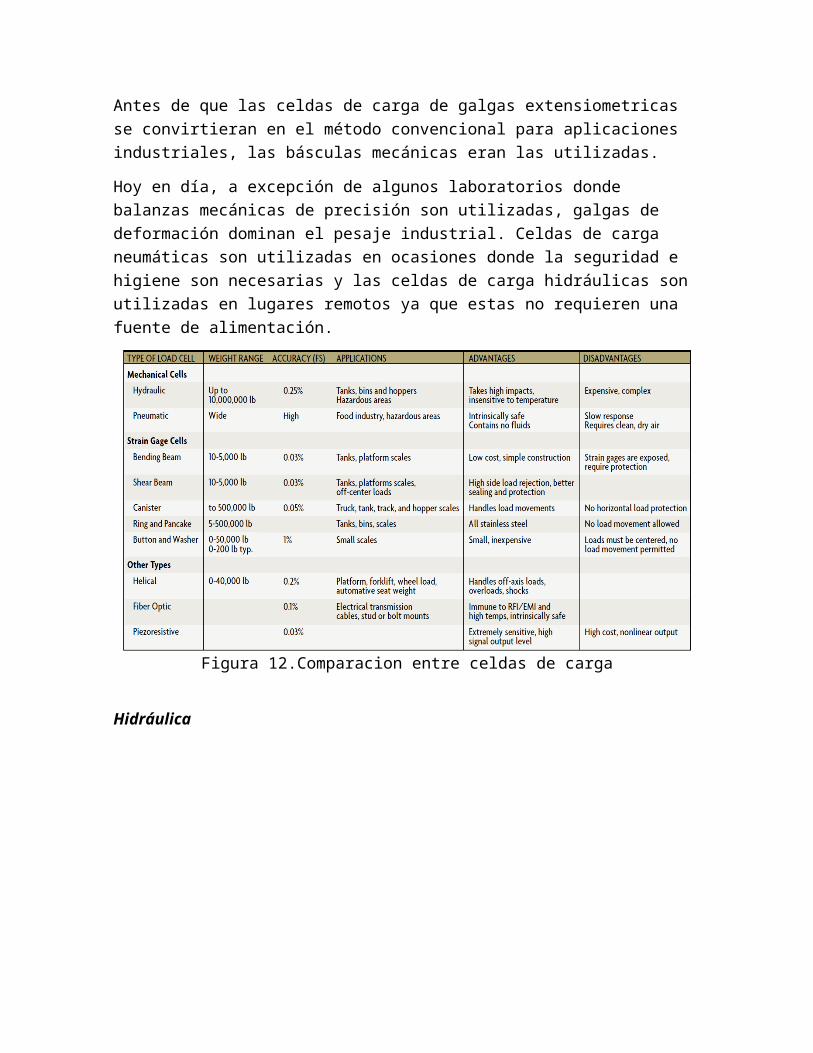
Figura 17. Elementos resorte de celda de carga
Las celdas de carga de viga en cortante (shear beam) miden la fuerza cortante causada por la carga. El diseño de este tipo de celda produce una cortante uniforme que puede ser medida por las galgas de deformación (Figura 17-C).
Las celdas de carga de esfuerzo directo o de columna son esencialmente sensores de flexión colocados en una columna dentro de un contenedor cilíndrico (figura 17-D).
Figura 18. Celda de carga tipo columna
Igualmente existen celdas de botón, las cuales pueden tener tamaños de ¼” hasta 1 ½” en diámetro. Los sensores más pequeños de este tipo solo pueden utilizarse para compresión pero los más grandes también pueden utilizarse para tensión.
Referencias
www.omega.com
Principles of measurement and instrumentation, Alan S. Morris, Prentice Hall
Transactions in measurement and control volume 3, Force-Related measurements, Omega


















