SIS-13 PON 84 ANÁLISIS DE LOS MÉTODOS DE DETECCIÓN ...
7
1 ANÁLISIS DE LOS MÉTODOS DE DETECCIÓN OSCILACIONES DE POTENCIA Ing. Carlos Alberto Rodríguez Arellano [email protected] Dr. David Sebastián Baltazar [email protected] INSTITUTO POLITÉCNICO NACIONAL Escuela Superior de Ingeniería Mecánica y Eléctrica Sección de Estudios de Posgrado e Investigación Unidad Profesional “Adolfo López Mateos”. Col. Lindavista, C. P. 07738, México D. F. Resumen—En este artículo se presenta una evaluación comparativa de tres métodos de detección de oscilaciones de potencia, el método de blinders, el método del voltaje del centro de oscilación y otro método que utiliza el desplazamiento y la aceleración angular, que se grafican en un plano de fase para detectar oscilaciones de potencia estables e inestables. Estos métodos de detección ayudan a los esquemas de protección del sistema eléctrico potencia a identificar cuando se presentan oscilaciones de potencia, debidas a disturbios que pueden causar que las máquinas síncronas del sistema pierdan el sincronismo unas respecto a otras. Durante una condición de pérdida de sincronismo, un relevador de distancia puede detectar una oscilación de potencia como una falla, si la trayectoria de la impedancia entra en la característica de operación del relevador; por esta razón se han desarrollo esquemas de protección, que permiten detectar y aplicar acciones de bloqueo y/o disparó por el relevador de distancia contra oscilaciones de potencia estables e inestables. En este trabajo se simula un sistema de dos máquinas realizado en SIMULINK ® , con el fin de observar el comportamiento de los métodos de detección de oscilaciones de potencia ante diferentes condiciones de operación que llevan al sistema en un caso a una condición estable y en otro a una condición inestable. Palabras Clave— Estabilidad, Métodos de detección de oscilaciones de potencia, Oscilaciones de potencia, Método de blinders, Método del voltaje del centro de oscilación, Método de plano de fase. I. Introducción La protección de distancia generalmente se emplea en los sistemas de transmisión. Dado que la impedancia de una línea de transmisión es proporcional a su longitud, los relevadores de distancia utilizan esta característica para medir la impedancia aparente de una línea. Estos relevadores están diseñados para operar ante fallas que ocurren entre la ubicación del relevador y el punto de alcance seleccionado, dando así discriminación para fallas que pueden ocurrir en diferentes secciones de línea [1]. El principio básico de la protección de distancia corresponde a la relación de tensión entre corriente medida en el punto del relevador. La impedancia aparente calculada de esta forma se compara con la impedancia de alcance, si la impedancia medida es menor que la impedancia de ajuste, se asume que existe una falla en la línea entre el relevador y el punto de alcance [2]. Estos disturbios pueden provocar oscilaciones en los ángulos de los rotores de las máquinas y dependiendo del disturbio se pueden generar severas oscilaciones en los flujos de potencia, voltajes, corrientes y otras variables del sistema. Si la separación angular entre las máquinas del sistema se mantiene dentro de ciertos límites, el sistema permanecerá en sincronismo, de lo contrario será evidente dentro de los 2 a 3 segundos seguidos al disturbio que se presentará una condición de pérdida de sincronismo [2]. Si los equipos de control instalados en el sistema pueden amortiguar adecuadamente las oscilaciones, entonces el sistema se restablecerá a su estado original o alcanzará un nuevo estado de equilibrio. Estas oscilaciones se conocen como oscilaciones de potencia estables, caso contrario, algunos de los generadores pueden estar “fuera de paso (OOS)” y, por lo tanto, perder el sincronismo. Estas condiciones de oscilación de potencia resultantes, se denominan oscilaciones de potencia inestables [3]. Las oscilaciones en el ángulo del rotor de las máquinas y, por lo tanto, las oscilaciones de potencia resultantes pueden hacer que impedancia medida por el relevador de distancia entre a las zonas de operación del relevador, e inicie el disparo de elementos del sistema. Un relevador debe ser capaz de diferenciar entre una condición normal de operación, una falla y una condición de oscilación de potencia estable e inestable. Si no se logra diferenciar entre cada una de las condiciones, se podrían presentar disparos en cascada de los elementos de protección que a su vez podría causar apagones en el sistema de potencia [4,5]. En la literatura se han descrito varios métodos para la detección de oscilaciones de potencia. Uno de los métodos más ampliamente implementados es la medición de la razón de cambio de impedancia aparente. Algunos otros métodos son el método del voltaje del centro de oscilación (SCV), el esquema R-Rdot, los métodos de lógica difusa, los métodos basados en redes neuronales, los métodos basados en el criterio de áreas iguales y un método basado en la desviación de la frecuencia de la medición del voltaje. También hay métodos que usan mediciones fasoriales sincronizadas y de área amplia para detectar condiciones de SIS-13 PON 84 RVP-AI/2017 SIS-13 PONENCIA RECOMENDADA POR EL COMITE DE SISTEMAS DE POTENCIA DEL CAPITULO DE POTENCIADEL IEEE SECCION MEXICO Y PRESENTADA EN LA REUNION INTERNACIONAL DE VERANO, RVP-AI/2017, ACAPULCO GRO., DEL 16 AL 22 DE JULIO DEL 2017.
Transcript of SIS-13 PON 84 ANÁLISIS DE LOS MÉTODOS DE DETECCIÓN ...

1
ANÁLISIS DE LOS MÉTODOS DE DETECCIÓN
OSCILACIONES DE POTENCIA Ing. Carlos Alberto Rodríguez Arellano
[email protected] Dr. David Sebastián Baltazar
INSTITUTO POLITÉCNICO NACIONAL
Escuela Superior de Ingeniería Mecánica y Eléctrica
Sección de Estudios de Posgrado e Investigación
Unidad Profesional “Adolfo López Mateos”.
Col. Lindavista, C. P. 07738, México D. F.
Resumen—En este artículo se presenta una evaluación comparativa
de tres métodos de detección de oscilaciones de potencia, el método
de blinders, el método del voltaje del centro de oscilación y otro
método que utiliza el desplazamiento y la aceleración angular, que
se grafican en un plano de fase para detectar oscilaciones de
potencia estables e inestables. Estos métodos de detección ayudan a
los esquemas de protección del sistema eléctrico potencia a
identificar cuando se presentan oscilaciones de potencia, debidas a
disturbios que pueden causar que las máquinas síncronas del sistema
pierdan el sincronismo unas respecto a otras. Durante una condición
de pérdida de sincronismo, un relevador de distancia puede detectar
una oscilación de potencia como una falla, si la trayectoria de la
impedancia entra en la característica de operación del relevador; por
esta razón se han desarrollo esquemas de protección, que permiten
detectar y aplicar acciones de bloqueo y/o disparó por el relevador de
distancia contra oscilaciones de potencia estables e inestables. En
este trabajo se simula un sistema de dos máquinas realizado en
SIMULINK®, con el fin de observar el comportamiento de los
métodos de detección de oscilaciones de potencia ante diferentes
condiciones de operación que llevan al sistema en un caso a una
condición estable y en otro a una condición inestable.
Palabras Clave— Estabilidad, Métodos de detección de oscilaciones
de potencia, Oscilaciones de potencia, Método de blinders, Método
del voltaje del centro de oscilación, Método de plano de fase.
I. Introducción
La protección de distancia generalmente se emplea en los
sistemas de transmisión. Dado que la impedancia de una línea
de transmisión es proporcional a su longitud, los relevadores de
distancia utilizan esta característica para medir la impedancia
aparente de una línea. Estos relevadores están diseñados para
operar ante fallas que ocurren entre la ubicación del relevador y
el punto de alcance seleccionado, dando así discriminación para
fallas que pueden ocurrir en diferentes secciones de línea [1].
El principio básico de la protección de distancia corresponde a
la relación de tensión entre corriente medida en el punto del
relevador. La impedancia aparente calculada de esta forma se
compara con la impedancia de alcance, si la impedancia medida
es menor que la impedancia de ajuste, se asume que existe una
falla en la línea entre el relevador y el punto de alcance [2].
Estos disturbios pueden provocar oscilaciones en los ángulos de
los rotores de las máquinas y dependiendo del disturbio se
pueden generar severas oscilaciones en los flujos de potencia,
voltajes, corrientes y otras variables del sistema. Si la
separación angular entre las máquinas del sistema se mantiene
dentro de ciertos límites, el sistema permanecerá en
sincronismo, de lo contrario será evidente dentro de los 2 a 3
segundos seguidos al disturbio que se presentará una condición
de pérdida de sincronismo [2]. Si los equipos de control
instalados en el sistema pueden amortiguar adecuadamente las
oscilaciones, entonces el sistema se restablecerá a su estado
original o alcanzará un nuevo estado de equilibrio. Estas
oscilaciones se conocen como oscilaciones de potencia estables,
caso contrario, algunos de los generadores pueden estar “fuera
de paso (OOS)” y, por lo tanto, perder el sincronismo. Estas
condiciones de oscilación de potencia resultantes, se denominan
oscilaciones de potencia inestables [3].
Las oscilaciones en el ángulo del rotor de las máquinas y, por
lo tanto, las oscilaciones de potencia resultantes pueden hacer
que impedancia medida por el relevador de distancia entre a las
zonas de operación del relevador, e inicie el disparo de
elementos del sistema. Un relevador debe ser capaz de
diferenciar entre una condición normal de operación, una falla
y una condición de oscilación de potencia estable e inestable. Si
no se logra diferenciar entre cada una de las condiciones, se
podrían presentar disparos en cascada de los elementos de
protección que a su vez podría causar apagones en el sistema de
potencia [4,5].
En la literatura se han descrito varios métodos para la detección
de oscilaciones de potencia. Uno de los métodos más
ampliamente implementados es la medición de la razón de
cambio de impedancia aparente. Algunos otros métodos son el
método del voltaje del centro de oscilación (SCV), el esquema
R-Rdot, los métodos de lógica difusa, los métodos basados en
redes neuronales, los métodos basados en el criterio de áreas
iguales y un método basado en la desviación de la frecuencia de
la medición del voltaje.
También hay métodos que usan mediciones fasoriales
sincronizadas y de área amplia para detectar condiciones de
SIS-13
PON 84
RVP-AI/2017 SIS-13 PONENCIA RECOMENDADA
POR EL COMITE DE SISTEMAS DE POTENCIA DEL
CAPITULO DE POTENCIA DEL IEEE SECCION
MEXICO Y PRESENTADA EN LA REUNION
INTERNACIONAL DE VERANO, RVP-AI/2017, ACAPULCO GRO., DEL 16 AL 22 DE JULIO DEL 2017.

2
oscilación en un sistema eléctrico de potencia. Algunos de los
métodos más utilizados se discuten brevemente a continuación
[3].
II. Métodos de detección de oscilaciones de potencia
II.A Método de Blinder
Durante condiciones de normales de operación, la impedancia
medida por el relevador es la correspondiente a la carga, la cual
se encuentra lejos de las características de operación del
relevador de distancia. Cuando se produce una falla, la
impedancia medida por el relevador se desplaza de manera
inmediata desde el punto de la impedancia de carga hasta la
posición que representa la impedancia de falla, sin embargo
durante una oscilación de potencia, la impedancia medida se
desplaza lentamente en el plano complejo [1,4,5].
Los esquemas de blinder utilizan la razón de cambio de la
impedancia para diferenciar entre una condición de falla y una
oscilación de potencia, para ello se colocan dos impedancias
características llamadas blinders en el plano complejo y se mide
el intervalo de tiempo que le lleva a la trayectoria de la
impedancia cruzar la distancia entre los blinders exterior (R2) e
interior (R1). Cuando este intervalo de tiempo es mayor que el
tiempo mínimo de ajuste, se declara una condición de oscilación
de potencia. De lo contrario, si la trayectoria de la impedancia
cruza los blinder R1 y R2 antes de expirar el tiempo de ajuste,
el relevador declara el evento como una falla en el sistema. En
la figura 1 se muestra la característica de operación del esquema
de blinders descrita previamente [6].
Figura 1. Esquema de Blinders (Adaptado de [6]).
El valor de los blinders exterior e interior, se calcula a partir de
la ecuación 1:
𝑅1 =𝑍𝑙
2 sin(𝐴𝑁𝐺𝑅1)
(1)
𝑅2 =𝑍𝑙
2 sin(𝐴𝑁𝐺𝑅2)
Donde 𝑅1 y 𝑅2 son los ajustes del blinder interior y exterior
respectivamente, 𝐴𝑁𝐺𝑅1 y 𝐴𝑁𝐺𝑅2 son los ángulos de ajuste de
los blinders interior y exterior respectivamente y 𝑍𝑙 representa
la impedancia de la línea, como se muestra en la figura 2 [6,7].
Cuando la trayectoria de la impedancia se desplaza dentro del
blinder exterior, el relevador inicia un “retraso de tiempo en el
bloqueo (OSBD)”. El OSBD detecta oscilaciones de potencia,
si el OSBD expira antes de que la trayectoria de la impedancia
entre en el blinder interior, el relevador declara una condición
oscilación de potencia y bloquea los elementos de protección
del relevador [6,8].
El ajuste del OSBD se obtiene a través de la impedancia de la
línea, los ángulos de ajuste de los blinders exterior e interior, la
frecuencia nominal 𝑓𝑛𝑜𝑚 y la frecuencia máxima de
deslizamiento 𝑓𝑠𝑙𝑖𝑝, la cual se define como la variación de la
diferencia angular de un sistema equivalente de dos máquinas
con respecto al tiempo, para el cálculo del OSBD, esta puede
ser elegida en un rango entre 4 y 7 Hz [6-8].
En la figura 2 se muestran los ajustes del OSBD, utilizando las
ecuaciones 2 y 3.
𝑂𝑆𝐵𝐷 =(𝐴𝑛𝑔𝑅1 − 𝐴𝑛𝑔𝑅2) ∙ 𝑓𝑛𝑜𝑚
360 ∙ 𝑓𝑠𝑙𝑖𝑝
[𝑐𝑖𝑐𝑙𝑜𝑠] (2)
𝐴𝑛𝑔𝑅1 = 2 ∙ tan−1 (𝑍𝑙
2 ∙ 𝑅1)
𝐴𝑛𝑔𝑅2 = 2 ∙ tan−1 (𝑍𝑙
2 ∙ 𝑅2)
(3)
Figura 2. Esquema de Blinders para determinar los ajustes OSBD
(Adaptado de [6]).
II.B Voltaje del centro de oscilación
El voltaje del centro de oscilación (SCV) se define como el
voltaje en un punto, para un sistema equivalente de dos
máquinas donde su valor es de 0 volts, cuando el ángulo de
separación entre las dos máquinas es de 180º. En la figura 3 se
muestra el diagrama fasorial de un sistema de dos máquinas, en
donde el SCV se representa como un fasor desde el origen 𝑜
hasta el punto 𝑜′, 𝐸𝑠 y 𝐸𝑟 representan el voltaje interno de la
máquina 1 y 2 respectivamente, 𝑍𝑆 y 𝑍𝑅 son las impedancias de
la fuente, 𝑍𝐿 es la impedancia de la línea, 𝐼 es la corriente del
sistema y 𝑉𝑠 es el voltaje en la ubicación del relevador [9].

3
Figura 3. Diagrama fasorial de un sistema de dos máquinas
(Adaptado de [9]).
El voltaje en el centro de oscilación 𝑆𝐶𝑉(𝑡) está en función de
la diferencia angular entre las fuentes 𝛿(𝑡) y en función del
tiempo (𝑡), esta puede ser representada por la ecuación 4,
asumiendo que ambas máquinas son de igual capacidad
[1,9,10].
𝑆𝐶𝑉(𝑡) = √2𝐸𝑠 sin (𝜔𝑡 +𝛿(𝑡)
2) cos (
𝛿(𝑡)
2) (4)
Una aproximación del SCV se puede obtener a partir del uso de
variables localmente disponibles en la ubicación del relevador,
esta aproximación se muestra en la ecuación 5:
𝑆𝐶𝑉 ≈ |𝑉𝑆| cos 𝜑 (5)
Donde |𝑉𝑆| es la magnitud del voltaje medido en la ubicación
del relevador y 𝜑 es la diferencia angular entre 𝑉𝑆 y la corriente
del sistema, (𝐼). En la figura 4, se observa que el fasor de
|𝑉𝑆| cos 𝜑 es una proyección del fasor 𝑉𝑆 sobre el eje de la
corriente, (𝐼). Para un sistema homogéneo con un ángulo de
impedancia, (𝜃), cercano a 90°, el fasor |𝑉𝑆| cos 𝜑 se aproxima
a la magnitud del voltaje del centro de oscilación 𝑆𝐶𝑉 [9,10].
Figura 4. Diagrama fasorial de un sistema homogéneo de dos
máquinas (Adaptado de [9]).
II.C Plano de fase
Este algoritmo determina la diferencia del ángulo entre los
voltajes de fase de secuencia positiva medida en dos puntos o
nodos del sistema de potencia. Esta diferencia en los ángulos es
utilizada para calcular la aceleración y el deslizamiento, que se
emplea para determinar una condición de oscilación, esto se
logra al compararlos en un plano de aceleración-deslizamiento,
conocido como plano de fase [11,12].
El cambio de la diferencia angular, (𝛿𝑘), con respecto al tiempo
se define como la frecuencia de deslizamiento, (𝑆𝑘), y el
cambio de la frecuencia de deslizamiento con respecto al
tiempo se define como la aceleración, (𝐴𝑘), como se muestra
en la ecuación 6.
𝑆𝑘 =1
360∙
𝛿𝑘 − 𝛿𝑘−1
𝑡𝑘 − 𝑡𝑘−1
[𝐻𝑧]
𝐴𝑘 =𝑆𝑘 − 𝑆𝑘−1
𝑡𝑘 − 𝑡𝑘−1
[𝐻𝑧/𝑠]
(6)
En la ecuación 6, 𝑆𝑘 representa la frecuencia de deslizamiento
en Hz y 𝑡𝑘 representa el tiempo en segundos entre cada muestra,
el factor 1/360 se utiliza para realizar un cambio en las unidades
de la frecuencia de deslizamiento, de grados/segundos a
ciclos/segundos o Hz [8,11,12].
La aceleración y el deslizamiento calculados a través de la
ecuación 6, se comparan en un plano aceleración-
deslizamiento, como se muestra en la figura 5, la abscisa
corresponde a la frecuencia de deslizamiento 𝑆𝑘 y la ordenada
a la aceleracion 𝐴𝑘. En este plano se definen dos regiones, una
región estable y una región inestable. En la región estable, el
sistema se mantiene operando en su estado inicial de operación
o en un nuevo estado de equilibrio ante cualquier disturbio,
mientras que en la región inestable, el sistema pierde el
sincronismo ante un disturbio. La delimitación de las regiones
se realiza por medio de una línea recta, que asemeja un blinder.
Esta línea o blinder, se encuentra definida por la ecuación de
desigualdad que se describe a continuación [8,11,12].
𝐴𝑘 > 𝑀 ∙ 𝑆𝑘 + 𝐴𝑜𝑓𝑓𝑠𝑒𝑡 (9)
La figura 5 se forma haciendo uso de la ecuación 9 para definir
las regiones estables e inestables del sistema de potencia.
Figura 5. Zonas de operación del algoritmo de plano de fase
(Adaptado de [8]).
III. Resultado de las simulaciones
En esta sección, se muestran los resultados de las simulaciones
de los métodos de detección de oscilaciones de potencia. Cada
uno de los métodos utilizados funciona con diferentes
principios de operación pero finalmente se llega al mismo
resultado, que es la detección de oscilaciones de potencia.

4
El sistema de potencia simulado está compuesto por una central
de generación hidráulica de 1000 MW (máquina M1) y una
central de generación local de 5000 MW (máquina M2)
conectadas a través de una línea de transmisión de 500 kV y 240
km, ambas máquinas están equipadas con una turbina hidráulica
y gobernador (HTG), sistema de excitación y estabilizador del
sistema de potencia (PSS). Las dos centrales alimentan un
centro de carga modelado por una carga resistiva de 5000 MW,
como se muestra la figura 6.
Figura 6. Sistema de potencia de dos máquinas (Adaptado de [8]).
El sistema se ha inicializado de tal manera que ambas máquinas
se encuentran operando al 50% de su capacidad nominal.
Para probar el funcionamiento de los métodos de detección de
oscilaciones de potencia, se simulan oscilaciones estables e
inestables en el sistema, a partir de una falla trifásica aplicada
al 50% de la línea de transmisión. Se considera que para este
sistema no es posible realizar una liberación apropiada de la
falla, debido a que al desconectar la línea las dos máquinas
pierden el sincronismo de manera inmediata, debido a que no
hay una conexión eléctrica entre ellas. El tipo de disturbio que
se simula es únicamente la aplicación de la falla con un tiempo
mínimo de duración y liberándose automáticamente después de
un retardo de tiempo establecido, el retardo de tiempo en la
liberación de la falla determina si la oscilación resultará estable
o inestable. Para simular una oscilación de potencia estable, el
tiempo de liberación de la falla es de 0.245 segundos. Si el
tiempo de liberación de la falla supera los 0.245 segundos
(tiempo crítico de liberación de la falla), el sistema se vuelve
inestable.
En las figuras 7 y 8 se muestra el comportamiento de la
impedancia de secuencia positiva para una condición de
oscilación estable e inestable. Se observa que al aplicar la falla,
5 segundos después de iniciar la simulación, la impedancia
medida por el relevador comienza a oscilar.
Figura 7. Diagrama de impedancia de secuencia positiva durante una
condición de oscilación estable.
Figura 8. Diagrama de impedancia de secuencia positiva durante una
condición de oscilación inestable.
El sistema de potencia mostrado en la figura 6 se encuentra
protegido por un relevador de distancia que monitorea las
tensiones y corrientes en el nodo B1, este relevador cuenta con
dos características tipo mho que protegen a la línea ante fallas.
Las zonas de operación del relevador se establecen en un 80%
de la impedancia de la línea para la zona 1 y en un 100% de la
línea para la zona 2.
III.A Esquema de Blinders
El esquema de blinders opera bajo el principio de monitoreo de
la razón de cambio de la impedancia aparente medida por el
relevador de distancia ubicado en el nodo B1.
De las ecuaciones 1 a 3, se obtienen los ajustes de los blinders
exterior e interior, a partir del ángulo de la línea protegida. Para
esta simulación, se seleccionó un ajuste del ángulo del blinder
interior de 115º, mientras que para el ángulo del blinder exterior
se seleccionó un ángulo de 105º. Estos ángulos se obtuvieron a
través de estudios de estabilidad ante diferentes contingencias
en el sistema de potencia.
El retardo en el bloqueo se ajusta regularmente entre 1.5 a 2.5
ciclos para proporcionar al relevador una mayor capacidad de
detectar entre una falla y una condición de oscilación. Para esta
simulación se utiliza un retardo en el bloqueo de 2 ciclos, o
33.33 milisegundos, para detectar y bloquear ante una
oscilación de potencia [1].
En la figura 9 se muestra la trayectoria de la impedancia durante
una condición de oscilación estable, la trayectoria en azul
representa el tiempo de duración de la falla, la cual se desplaza
de manera inmediata del punto de carga al punto de falla,
llevándole aproximadamente 1 milisegundo atravesar las
características tipo blinder exterior e interior de lado derecho.
Una vez que la falla es eliminada, la trayectoria en rojo
representa la condición de oscilación estable, durante esta
condición se observa que la trayectoria de la impedancia entra
y sale del blinder interior y exterior del lado derecho, llevándole
aproximadamente 30 milisegundos atravesar ambas
características tipo blinder. Debido a que la trayectoria de la
impedancia no atraviesa el blinder interior y exterior del lado
izquierdo, el algoritmo detecta una condición de oscilación
estable.
4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10
Tiempo [s]
0
200
400
600
800
1000
1200
1400
1600
Ma
gnitu
d [
+]
Falla
Post-falla
Pre-falla
4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10
Tiempo [s]
0
2000
4000
6000
8000
10000
12000
14000
Ma
gn
itu
d [
+]
Falla

5
Figura 9. Método de blinders, oscilación estable.
Para el caso de una oscilación de potencia inestable, la
trayectoria en azul de la figura 10 representa el tiempo de
duración de la falla, mientras que la trayectoria en rojo
representa la condición de oscilación inestable. Para este caso
se puede observar que la trayectoria en rojo permanece dentro
de las zonas de operación del relevador, para posteriormente
atravesar las características tipo blinder interior y exterior del
lado izquierdo, de esta manera el algoritmo detecta una
condición de oscilación inestable en 0.175 segundos.
Figura 10. Método de blinders, oscilación inestable.
En la figura 11 se observa que la trayectoria de la impedancia
atraviesa ambos blinders izquierdo y derecho en repetidas
ocasiones.
Figura 11. Trayectoria de la impedancia durante una oscilación
inestable.
III.B Método de voltaje del centro de oscilación SCV
Para aplicar el método del voltaje del centro de oscilación SCV,
se selecciona un ajuste máximo para 𝑑(𝑆𝐶𝑉) 𝑑𝑡⁄ con el fin de
detectar oscilaciones de potencia inestables, este ajuste se
obtiene a través de estudios de estabilidad ante diferentes
contingencias en el sistema de potencia.
Los resultados de las simulaciones por el método SCV se
muestran en las figuras 12 y 13. En la figura 12 se muestra el
comportamiento del algoritmo SCV para una condición de
oscilación estable, en esta figura se observa que el valor de
𝑑(𝑆𝐶𝑉) 𝑑𝑡⁄ se mantiene dentro del límite establecido, por lo
cual el algoritmo detecta una condición de oscilación estable.
Figura 12. Método de SCV, oscilación estable
En la figura 13 se muestra el comportamiento del algoritmo
SCV para una condición de oscilación inestable, en esta figura
se observa que el valor de 𝑑(𝑆𝐶𝑉) 𝑑𝑡⁄ comienza a aumentar al
liberar la falla hasta que después de 0.246 segundos, el valor de
𝑑(𝑆𝐶𝑉) 𝑑𝑡⁄ supera el límite establecido, por lo cual el
algoritmo detecta una condición de oscilación inestable.
Figura 13. Método de SCV, oscilación inestable
III.C Método de Plano de Fase
Para emplear el algoritmo de plano de fase es necesario
establecer los valores de ajuste de la recta que divide la zona
estable de la zona inestable, los valores de ajuste de la recta se
seleccionaron a través de estudios de estabilidad para
determinadas característica de operación del sistema. Los
ajustes del algoritmo seleccionados para las simulaciones son:
-80 -60 -40 -20 0 20 40 60 80 100
Parte Real de la Impedancia [+ ]
-20
0
20
40
60
80
100
120
Pa
rte
Im
ag
ina
ria
de la I
mp
ed
an
cia
[+
]
Falla
Oscilación de
Potencia Estable
-80 -60 -40 -20 0 20 40 60 80 100
Parte Real de la Impedancia [+ ]
-20
0
20
40
60
80
100
120
Part
e I
mag
inari
a d
e la
Im
pe
da
ncia
[+
]
Falla
Oscilación de
Potencia Inestable
-600 -400 -200 0 200 400 600
Parte Real de la Impedancia [+ ]
-600
-400
-200
0
200
400
600
800
1000
Part
e I
ma
gin
ari
a d
e la
Im
pe
da
ncia
[+
]
4 5 6 7 8 9 10
Tiempo [s]
-80
-60
-40
-20
0
20
40
60
80
d(S
CV
)
Ajuste del SCV
Zona estable
Zona inestable
4 5 6 7 8 9 10
Tiempo [s]
0
500
1000
1500
2000
2500
3000
3500
4000
4500
d(S
CV
)
Ajuste del SCV
Zona estable
Zona inestable
6
𝐴𝑘 > 𝑀 ∙ 𝑆𝑘 + 𝐴𝑜𝑓𝑓
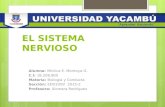
𝐴𝑜𝑓𝑓 = 38.33 𝐻𝑧/𝑠
𝑀 = −16.667 𝑠−1
En la figura 14 se muestra el comportamiento del plano
aceleración-deslizamiento para una condición de oscilación
estable. La trayectoria en azul representa el tiempo de
aplicación de la falla, esta trayectoria parte del origen y oscila
dentro de la zona de operación estable, cuando la falla es
liberada, la trayectoria en rojo representa el tiempo de
oscilación del sistema, esta trayectoria oscila dentro de la zona
de operación estable hasta alcanzar nuevamente el punto de
equilibrio estable. En esta forma el algoritmo detecta una
condición de oscilación estable.
Figura 14. Método de plano de fase, oscilación estable
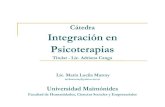
En la figura 15 se muestra el comportamiento del plano
aceleración-deslizamiento para una condición de oscilación
inestable, la trayectoria en azul representa el tiempo de duración
de la falla, mientras que la trayectoria en rojo representa el
tiempo de oscilación del sistema.
Como se observa en la figura 15 el punto de equilibrio estable
antes de la falla es el origen, al iniciar la falla la trayectoria se
desplaza dentro de la zona de operación estable y una vez
eliminada la falla, la trayectoria se desplaza fuera de la zona de
operación estable, cuando esto sucede el algoritmo detecta una
condición de oscilación inestable en 0.097 segundos.
Figura 15. Método de plano de fase, oscilación inestable
IV. Comparación de los métodos de detección contra
oscilaciones de potencia
Para el análisis de los métodos de detección de oscilaciones de
potencia se consideró el tiempo de detección, la dificultad en su
ajuste y su comportamiento ante diferentes condiciones de
operación en el sistema con ajustes previamente establecidos.
En el análisis de los métodos de detección se simulan tres casos
que se describen a continuación.
Caso 1) La central de generación local (máquina M2) opera a
su capacidad nominal y la central de generación hidráulica
(máquina M1) al 50% de su capacidad nominal.
Caso 2) La central de generación local (máquina M2) opera a
su capacidad mínima y la central de generación hidráulica
(máquina M1) opera a su capacidad nominal, ambas máquinas
alimentan un centro de carga de 1000 MW.
Caso 3) El centro de carga se modela como una combinación de
cargas, 2000 MW resistivas, 3000 MVAR inductivas y 1000
MVAR capacitivas.
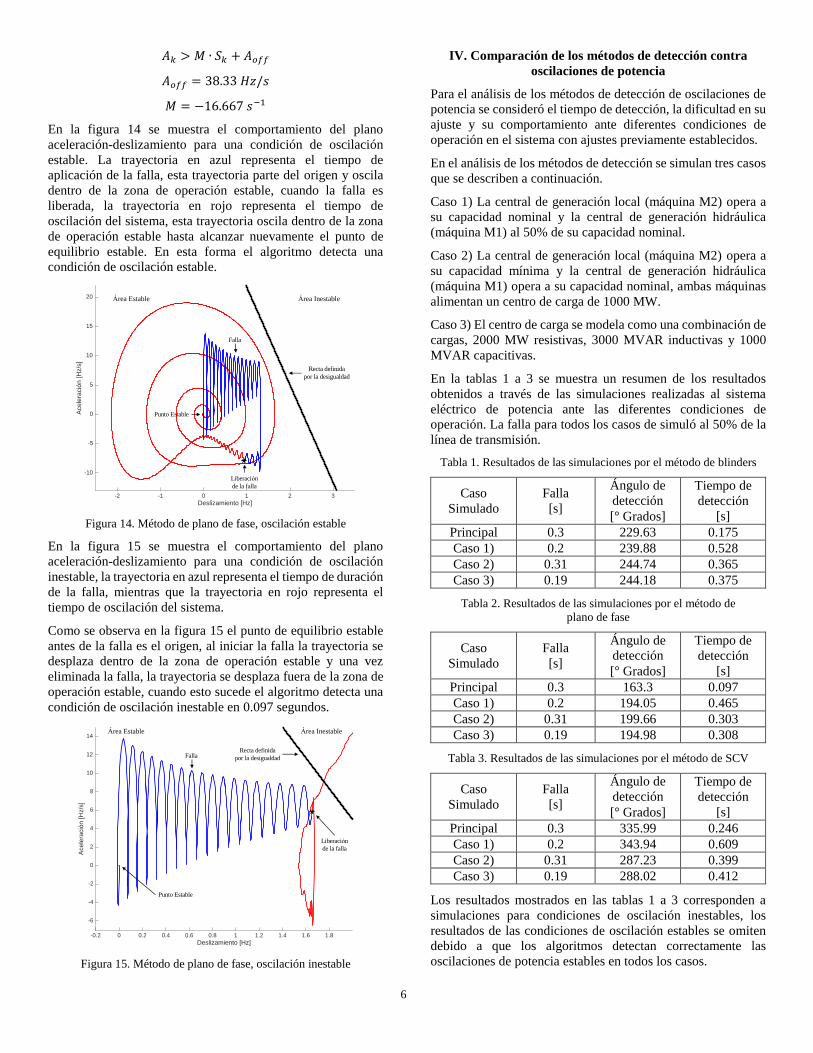
En la tablas 1 a 3 se muestra un resumen de los resultados
obtenidos a través de las simulaciones realizadas al sistema
eléctrico de potencia ante las diferentes condiciones de
operación. La falla para todos los casos de simuló al 50% de la
línea de transmisión.
Tabla 1. Resultados de las simulaciones por el método de blinders
Caso
Simulado
Falla
[s]
Ángulo de
detección
[° Grados]
Tiempo de
detección
[s]
Principal 0.3 229.63 0.175
Caso 1) 0.2 239.88 0.528
Caso 2) 0.31 244.74 0.365
Caso 3) 0.19 244.18 0.375
Tabla 2. Resultados de las simulaciones por el método de
plano de fase
Caso
Simulado
Falla
[s]
Ángulo de
detección
[° Grados]
Tiempo de
detección
[s]
Principal 0.3 163.3 0.097
Caso 1) 0.2 194.05 0.465
Caso 2) 0.31 199.66 0.303
Caso 3) 0.19 194.98 0.308
Tabla 3. Resultados de las simulaciones por el método de SCV
Caso
Simulado
Falla
[s]
Ángulo de
detección
[° Grados]
Tiempo de
detección
[s]
Principal 0.3 335.99 0.246
Caso 1) 0.2 343.94 0.609
Caso 2) 0.31 287.23 0.399
Caso 3) 0.19 288.02 0.412
Los resultados mostrados en las tablas 1 a 3 corresponden a
simulaciones para condiciones de oscilación inestables, los
resultados de las condiciones de oscilación estables se omiten
debido a que los algoritmos detectan correctamente las
oscilaciones de potencia estables en todos los casos.
-2 -1 0 1 2 3
Deslizamiento [Hz]
-10
-5
0
5
10
15
20
Ace
lera
ció
n [
Hz/s
]
Liberación
de la falla
Punto Estable
Falla
Área Estable Área Inestable
Recta definida
por la desigualdad
-0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
Deslizamiento [Hz]
-6
-4
-2
0
2
4
6
8
10
12
14
Ace
lera
ció
n [
Hz/s
]
Liberación
de la falla
Punto Estable
Falla
Área Estable Área Inestable
Recta definida
por la desigualdad

7
De acuerdo a los resultados mostrados en las tablas 1 a 3, los
algoritmos de detección de oscilaciones de potencia operan
correctamente en la detección de oscilaciones de potencia
inestables, con los ajustes previamente establecidos para el caso
principal.
A través de estos resultados se observa que el método de plano
de fase detecta una condición de oscilación inestable en un
periodo de tiempo más corto que los otros métodos, mientras
que al método de SCV le lleva mayor tiempo detectar las
mismas condiciones.
Los ajustes por el método de blinders requieren de una mayor
cantidad de parámetros del sistema para ser calculados,
mientras que para los otros métodos no es necesario conocer los
parámetros del sistema para adecuar correctamente sus ajustes.
V. Conclusiones
En este trabajo se analizó el comportamiento de los métodos de
detección de oscilaciones de potencia. Se presentaron diferentes
ejemplos para observar el comportamiento de los métodos de
detección ante diferentes condiciones de operación.
El método de blinder, requiere un extenso estudio del sistema
de potencia ante diferentes condiciones de operación. En este
método es necesario analizar la trayectoria de la impedancia y
la velocidad con la que la impedancia atraviesa las
características tipo blinders, para establecer los ajustes de los
blinders y del OSBD. Sin embargo no siempre es posible
establecer los ajustes de los blinders y del OSBD
adecuadamente. Para estos casos, se deben tomar medidas
especiales para asegurar la detección correcta de una condición
de oscilación.
Para el método del SCV y del plano de fase no se requieren
parámetros del sistema para realizar los ajustes de detección de
oscilaciones de potencia. Por lo tanto, estos métodos no
requieren que se lleven a cabo extensos estudios del sistema y,
como tal, no requieren ninguna configuración definida por el
usuario.
Este documento muestra que cada uno de los métodos
analizados pueden ser utilizados para detectar condiciones de
oscilación en un sistema de potencia, siendo algunos métodos
más rápidos que otros y con un mayor o menor grado de
dificultad en su ajuste.
En conclusión, hay muchos métodos de detección de oscilación
de potencia que pueden ser utilizados para proteger un sistema
de potencia en condiciones de oscilación, cada uno de los cuales
tiene sus propios beneficios e inconvenientes.
VI. Bibliografía
[1] G. W. Stagg and A. H. El-Abiad, “Computer Methods in
Power System Analysis”, McGraw-Hill, 1968.
[2] P. Kundur, “Power System Stability and Control”,
California: McGraw-Hill, 1993.
[3] V. A. Ambekar and S.S Dambhare, “Comparative
Evaluation of Out of Step Detection Schemes for Distance
Relays”, IEEE Power India Conference, Diciembre 2012.
[4] "Power swing and out-of-step considerations on
transmission lines," IEEE PSRC Working Group WG D6
report, 2005.
[5] "Protection System Response to Power Swings", NERC –
System Protection and Control Subcommittee, Agosto 2013.
[6] SEL-421 Relay, Protection and Automation System:
Instruction Manual, Schweitzer Engineering Laboratories,
2013.
[7] J. Mooney and N. Fischer, “Application Guidelines for
Power Swing Detection on Transmission Systems”, presented
at 32nd Annual Western Protective Relay Conference,
Schweitzer Engineering Laboratories, Octubre 2005.
[8] J. A. Castillo, “Estudio de la aplicación de mediciones
fasoriales en la protección contra perdida de sincronismo
usando el plano de fase”, M. en C. Tesis, IPN SEPI ESIME
Zacatenco, México D.F., 2015.
[9] G. Benmouyal, D. Hou and D. Tziouvaras, “Zero Setting
Power-Swing Blocking Protection”, Proceedings of the 31st
Annual Western Protective Relay Conference, 2004.
[10] N. Fischer, G. Benmouyal, D. Hou, D. Tziouvaras, J.
Byrne-Finley, and B. Smyth, “Do System Impedances Really
Affect Power Swings – Applying Power Swing Protection
Elements Without Complex System Studies”, 65th Annual
Conference for Protective Relay Engineers, Schweitzer
Engineering Laboratories, Abril 2012.
[11] E. O. Schweitzer and A. Guzman, “Synchrophasor
Processor Detects Out-of-Step Conditions”, Schweitzer
Engineering Laboratories, 2011.
[12] A. Guzman, V. Mynam, and G. Zweigle, “Backup
Transmission Line Protection for Ground Faults and Power
Swing Detection Using Synchrophasors”, 34th Annual Western
Protective Relay Conference, Octubre 2007.
VII. Curriculum Vitae
Carlos Alberto Rodríguez Arellano. Nació
en la Ciudad de México. Graduado como
Ingeniero Eléctrico de la ESIME IPN en el
año 2015, México D.F. Actualmente es
alumno del programa de Maestría en Ciencias
en Ingeniería Eléctrica en SEPI ESIME IPN
ciclo 2015-2017. Su área principal de interés
es la Protección de Sistemas de Potencia,
Estabilidad y Análisis de Sistemas Eléctricos de Potencia.
David Sebastián Baltazar. Nació en San
Jerónimo Michoacán.Ingeniero Industrial
en Eléctrica en 1991 del Instituto
Tecnológico de Morelia. Maestro en
Ciencias (1993) y Doctor en Ciencias (1999)
en Ingeniería Eléctrica en la SEPI ESIME
IPN. Actualmente su principal área de
interés es la Protección de Sistemas de
Potencia, es profesor de tiempo completo de la SEPI ESIME
IPN.