
SISTEMA DE ADQUISICIÓN DE DATOS Y CONTROL DE LA …
47
1 SISTEMA DE ADQUISICIÓN DE DATOS Y CONTROL DE LA PRÁCTICA DE LABORATORIO MOVIMIENTO UNIFORME Y UNIFORMEMENTE ACELERADO DEL LABORATORIO PHYSILAB ANDRÉS FELIPE PEDREROS FRANCO UNIVERSIDAD CATÓLICA DE PEREIRA FACULTAD DE CIENCIAS BÁSICAS E INGENIERIA PROGRAMA DE INGENIERIA EN SISTEMAS Y TELECOMUNICACIONES PEREIRA 2012
Transcript of SISTEMA DE ADQUISICIÓN DE DATOS Y CONTROL DE LA …

1
SISTEMA DE ADQUISICIÓN DE DATOS Y CONTROL DE LA PRÁCTICA DE LABORATORIO MOVIMIENTO UNIFORME Y UNIFORMEMENTE
ACELERADO DEL LABORATORIO PHYSILAB
ANDRÉS FELIPE PEDREROS FRANCO
UNIVERSIDAD CATÓLICA DE PEREIRA FACULTAD DE CIENCIAS BÁSICAS E INGENIERIA
PROGRAMA DE INGENIERIA EN SISTEMAS Y TELECOMUNICACIONES PEREIRA
2012

2
SISTEMA DE ADQUISICIÓN DE DATOS Y CONTROL DE LA PRÁCTICA DE LABORATORIO MOVIMIENTO UNIFORME Y UNIFORMEMENTE
ACELERADO DEL LABORATORIO PHYSILAB
ANDRÉS FELIPE PEDREROS FRANCO
TESIS DE GRADO
TUTOR JAMES ANDRÉS BARRERA MONCADA
INGENIERO ELECTRICISTA
UNIVERSIDAD CATÓLICA DE PEREIRA FACULTAD DE CIENCIAS BÁSICAS E INGENIERIA
PROGRAMA DE INGENIERIA EN SISTEMAS Y TELECOMUNICACIONES PEREIRA
2012
3
TABLA DE CONTENIDO
Pág.
RESUMEN …………………………………………………………………………….9
SUMMARY ……………………………………………………………………………10
FORMULACIÓN DEL PROBLEMA .................................................................. 11
1. OBJETIVOS .................................................................................. 12
1.1. OBJETIVO GENERAL ..................................................................................................... 12
1.2. OBJETIVOS ESPECÍFICOS .............................................................................................. 12
2. MARCO TEÓRICO ........................................................................ 13
2.1. MOVIMIENTO UNIFORME ........................................................................................... 13
2.2. MOVIMIENTO UNIFORMEMENTE ACELERADO ........................................................... 13
2.3. SEÑALES ....................................................................................................................... 15
2.4. ADQUISICIÓN DE DATOS ............................................................................................. 15
2.4.1. Sensores o transductores .................................................................................... 16
2.4.1.1. Sensor de corriente ......................................................................................... 16
2.4.1.2. Sensor de voltaje ............................................................................................. 17
2.4.1.3. Sensor resistivo ............................................................................................... 17
2.4.2. Fotocompuerta pasco ......................................................................................... 17
2.4.2.1. Aplicaciones típicas ......................................................................................... 18
2.4.2.2. Características principales ............................................................................... 18
2.4.3. El acondicionamiento de la señal ........................................................................ 18
2.4.3.1. Amplificación ................................................................................................... 19
2.4.3.2. Aislamiento ...................................................................................................... 19
2.4.3.3. Multiplexado ................................................................................................... 19
2.4.3.4. Filtrado de ruido .............................................................................................. 19
2.4.4. Conversión a/d y d/a ........................................................................................... 19
2.4.5. Selección y/o extracción de parámetros ............................................................. 19
2.5. TARJETA DE ADQUISICIÓN .......................................................................................... 20
2.6. MICROCONTROLADOR ................................................................................................ 21
4
2.7. MOTORES ELECTRICOS ................................................................................................ 22
2.7.1. Motores de corriente continua ........................................................................... 22
2.7.2. Motores de correinte alterna .............................................................................. 22
2.8. C# ................................................................................................................................. 23
2.9. MySql ........................................................................................................................... 23
2.10. MySql-connector ..................................................................................................... 23
2.11. NIDAQ ...................................................................................................................... 23
2.12. CRYSTAL REPORTS ................................................................................................... 23
2.13. VERTRIGO ................................................................................................................ 24
3. METODOLOGÍA SEGUIDA PARA EL DESARROLLO DEL
PROYECTO ..................................................................................................... 25
3.1. DIAGRAMA DE FLUJO DE DATOS ................................................................................. 25
3.2. DIAGRAMA ENTIDAD RELACIÓN ................................................................................. 25
3.3. DIAGRAMA DE TRANSICIÓN DE ESTADOS ................................................................... 25
4. DESARROLLO DEL PROYECTO ................................................. 27
4.1. CARRIL DE AIRE ............................................................................................................ 27
4.2. PARTES DEL CARRIL DE AIRE........................................................................................ 27
4.2.1. Fuente ó compresor ............................................................................................ 28
4.2.2. Riel de aire ........................................................................................................... 28
4.2.3. Fotocompuertas .................................................................................................. 28
4.2.4. Carro deslizador .................................................................................................. 28
4.2.5. Disparador ........................................................................................................... 28
4.3. ANTECEDENTES DE LAS PRÁCTICAS ............................................................................ 28
4.3.1. Movimiento uniforme ......................................................................................... 28
4.3.2. Movimiento uniformemente acelerado .............................................................. 29
4.4. PUESTA EN MARCHA DEL SISTEMA LOCAL.................................................................. 29
4.5. RECEPCIÓN Y ENVÍO DE LA INFORMACIÓN POR MEDIO DE LA TARJETA DE
ADQUISICIÓN........................................................................................................................... 32
4.6. PRÁCTICA DE MOVIMIENTO UNIFORME CON EL SISTEMA ......................................... 32
4.7. DESARROLLO DE LA PRÁCTICA .................................................................................... 34
4.8. MOVIMIENTO UNIFORMEMENTE ACELERADO ........................................................... 35
4.9. GENERADOR DE REPORTES ......................................................................................... 36
4.10. EN EL DESARROLLO DEL SOFTWARE ....................................................................... 37
5
4.10.1. Metodología de yourdon .................................................................................... 37
4.10.1.1. Diagrama de flujo de datos ............................................................................. 37
4.10.1.2. Diagrama entidad relación .............................................................................. 38
4.10.1.3. Diagrama de transición de estados ................................................................. 39
4.10.2. Proceso unificado ................................................................................................ 39
4.10.2.1. Definición de requerimientos.......................................................................... 39
4.10.2.2. Clasificación de requerimientos ...................................................................... 40
4.10.2.3. Diagramas de casos de uso ............................................................................. 42
4.10.2.4. Diagramas de clases ........................................................................................ 42
5. CONCLUSIONES .......................................................................... 43
6. RECOMENDACIONES ................................................................. 44
7. REFERENCIAS BIBLIOGRAFICAS .............................................. 45
6
LISTA DE TABLAS
Pág.
TABLA 1 CÓDIGOS DEL SISTEMA ............................................................. 33
TABLA 2 TABLA PARA EL ENVIO DE LA INFORMACIÓN ......................... 34
TABLA 3 TABLA PARA LA RECEPCION DE LA INFORMACIÓN ............... 35
TABLA 4 TABLA DE CÓDIGOS ................................................................... 36
TABLA 5 CODIFICACIÓN Y PONDERACIÓN DE REQUERIMIENTOS ...... 40
7
LISTA DE GRAFICAS
Pág.
GRAFICO1 PROCESO DE ADQUISICIÓN .................................................. 16
GRAFICO2 FOTOCOMPUERTA PASCO .................................................... 18
GRAFICO3 D.A.Q NATIONAL INSTRUMENTS 6009 .................................. 20
GRAFICO4 PROCESO DE UN MICROCONTROLADOR ........................... 22
GRAFICO5 CARRIL DE AIRE ...................................................................... 27
GRAFICO6 FORMULARIO DE VALIDACIÓN .............................................. 30
GRAFICO7 FORMULARIO DE REGISTRO ................................................. 30
GRAFICO8 FORMULARIO DE SELECCIÓN DE PRACTICA ...................... 32
GRAFICO9 FORMULARIO DE CONFIGURACIÓN ..................................... 32
GRAFICO10 FORMULARIO ADQUISICIÓN .................................................. 34
GRAFICO11 FORMULARIO DE RECEPCIÓN .............................................. 35
GRAFICO12 DIAGRAMAS DE FLUJOS DE DATOS ..................................... 37
GRAFICO13 DIAGRAMA E-R ........................................................................ 38
GRAFICO14 DIAGRAMA DE TRANSICIÓN DE ESTADOS .......................... 39
GRAFICO15 DIAGRAMA DE CASOS DE USO ............................................. 42
GRAFICO16 DIAGRAMA DE CLASES .......................................................... 42
8
LISTA DE ANEXOS
Pág.
ANEXO A MANUAL DE USUARIO ................................................................ 46
9
RESUMEN
El presente proyecto de grado es desarrollado en la modalidad de residencia en línea de investigación, el cual se realiza al interior del grupo de investigación GEMA. Su objetivo principal es apoyar el proyecto de investigación que realizan conjuntamente las universidades Católica de Pereira Católica de Manizales y la Universidad de Medellín, para el desarrollo de un laboratorio remoto y virtual para la enseñanza de la física denominado “Physilab”. Dicho proyecto es patrocinado por el Ministerio de Educación Nacional a través de la convocatoria 10-004 del 2010, hecha por RENATA (Red Nacional Académica de Tecnología Avanzada). Este trabajo denominado “SISTEMA DE ADQUISICIÓN DE DATOS Y CONTROL DE LA PRÁCTICA DE LABORATORIO MOVIMIENTO UNIFORME Y UNIFORMEMENTE ACELERADO DEL LABORATORIO PHYSILAB”, busca apoyar esta investigación, a través de la creación de un desarrollo software que permita el control y adquisición de datos que se ejecutan en un carril de aire, teniendo como finalidad que el estudiante pueda llevar a la práctica los conceptos teóricos vistos en el aula de clase con el fin apoyar los procesos de enseñanza - aprendizaje y así mejorar las competencias pertinentes en el área de Física. Palabras Claves: Adquisicion de Datos, Practica de laboratorio, Movimiento uniforme, Movimiento uniformemente Acelerado, Carril de aire.
10
SUMMARY
This project is developed in grade mode research online residence, which is performed within GEMA research group. Its main objective is to support the research project conducted jointly by the Catholic university Pereira, Catholic university Manizales and the University of Medellin for the development of a remote and virtual laboratory for the teaching of physics called "Physilab". This project is sponsored by the Ministry of National Education through the call 10-004 2010, made by RENATA (Network Academic National Advanced Technology). This work entitled "SYSTEM DATA ACQUISITION AND CONTROL THE LAB AND UNIFORMLY MOVING UNIFORM ACCELERATED PHYSILAB LAB ", seeks to support this research, by creating a software development permitting data acquisition and control running on an air track, purpose of taking the student to implement theoretical concepts seen in the classroom to support the teaching - learning and improve the relevant skills in the area of Physics. Keywords: Data Acquisition, lab, Uniform motion, uniformly accelerated motion, Lane Air.
11
FORMULACIÓN DEL PROBLEMA En la actualidad la enseñanza de la física, las explicaciones sobre los fenómenos naturales siguen siendo procesos teóricos, los cuales se apoyan en ayudas o herramientas ya sean físicas como instrumentos de laboratorio o virtuales por medio de simulaciones, en la mayoría de las veces realizados como applets desarrollados en java, el problema principal está en que los alumnos solo se enmarcan en la teoría vista en clase, evidenciando dificultades en llevar dichos conceptos a la práctica cuando se presentan los laboratorios, de igual forma se le dificulta manipular los equipos y tomar las medidas de las variables de dicho experimento. La universidad Católica de Pereira no es ajena a esta problemática. En la mayoría de los cursos de Física en los cuales se imparten tanto conceptos teóricos como prácticos, la mayor dificultad con que se enfrentan los estudiantes radica en el control y la medición de las variables presentes en el experimento, como se explica en el párrafo anterior los alumnos centran su trabajo en la apropiación de los conceptos teóricos vistos en clase , pero pocas veces son capaces de llevar dichos conceptos a la práctica. Este desarrollo pretende fortalecer los conceptos adquiridos en el aula de clase, sin desligar la importancia que tiene en esta área el acercamiento de dichos conceptos teóricos a la práctica. Las ventajas de tener un laboratorio automatizado y/o instrumentado es que los estudiantes pueden por medio de este, mejorar los procesos de aprendizaje de la práctica que se está realizando, ya que permiten tener un control de las variables a manejar, permitiendo resultados más precisos. Esto con el fin de indagar sobre la siguiente pregunta: ¿Cómo a través de un sistema de adquisición y control se pueden mejorar los resultados de las pruebas y así las competencias educativas de los estudiantes?
12
1. OBJETIVOS
1.1. OBJETIVO GENERAL
Diseñar e implementar un desarrollo software que permita el control y adquisición de los datos provenientes de la práctica de movimiento con velocidad y aceleración constante en el laboratorio Physilab.
1.2. OBJETIVOS ESPECÍFICOS
Realizar un diseño de software que permita la adquisición de la información procedente de la práctica de movimiento uniforme y uniformemente acelerado.
Implementar el software para el control y adquisición de los datos en la práctica de movimiento uniforme y uniformemente acelerado.
Desarrollar la base de datos que permita almacenar, procesar y/o manipular la información no solo del estudiante sino también de la práctica.
Ejecutar las pruebas del software pertinentes, que permitan el eficiente manejo de la práctica a desarrollar.
Realizar el modulo de informes para el administrador del sistema.

13
2. MARCO TEÓRICO
2.1. MOVIMIENTO UNIFORME
El movimiento es la variación de posición de una partícula, suponiendo que esta se desplaza de un punto a otro, teniendo en cuenta dicha afirmación se puede concluir que el movimiento uniforme consiste en variar la posición de la partícula donde su velocidad es constante y su velocidad instantánea en cualquier momento del intervalo de tiempo es igual a la velocidad promedio de
dicho intervalo, donde en ningún momento cambiará su velocidad ya que dentro del sistema no presenta ningún ente que pueda generar aceleración o desaceleración de la partícula, el modelo matemático ha sido formulado de la siguiente manera:
Donde:
Esta ecuación nos indica que la posición de la partícula viene dada por la suma
de su posición original xi en el instante t = 0, mas el desplazamiento que se produce durante el intervalo de tiempo ∆t, dándonos como resultado:
Esta es la ecuación principal utilizada en el modelo de partícula con velocidad constante.
2.2. MOVIMIENTO UNIFORMEMENTE ACELERADO

14
La aceleración es una medida la rapidez, con que varía la velocidad, esta es una cantidad vectorial, que está completamente caracterizada por la magnitud
y la dirección en la cual se presenta. La aceleración está dada en . Cuando la aceleración es constante, dicha aceleración promedio en cualquier intervalo de tiempo es igual a la aceleración instantánea en cualquier punto de dicho intervalo. En consecuencia, la velocidad aumenta o disminuye en la misma proporción durante todo el movimiento. Teniendo en cuenta dicha afirmación tendremos:
Por conveniencia, establecemos que t = 0 y que es un instante de tiempo arbitrario. Utilizando esta notación, podemos expresar la aceleración como:
Vx cambia en la misma posición durante
Todo el movimiento
Despues de obtener dichas formulas, realizamos las siguientes igualdades:
;
Dando como resultado la siguiente ecuación:
15
Donde se muestra la velocidad como función del tiempo para una aceleración constante.
Durante las pruebas de movimiento uniforme y uniformemente acelerado que se ejecutan sobre el riel de aire se hace necesario realizar la medición de la posición y el tiempo de desplazamiento de la partícula, esta información es obtenida a través de un proceso de adquisición de señales tanto análogas como digitales.
2.3. SEÑALES
“Una señal no es más que la variación en el tiempo de cualquier fenómeno físico por el cual se pretende usar para transmitir una información, Las señales son patrones de variación que representan información codificada”( ROBERTS, 2005). Dentro de las señales que se usaran en el proyecto se definen las 2 más relevantes: Señal analógica de tiempo continuo: es aquella señal que se define en todo instante sobre algún intervalo de tiempo, se llama así ya que muchos sistemas la variación de la señal analógica con el tiempo es análoga a algún fenómeno físico que está siendo medido. Una señal de valor continuo es aquella que puede tener un valor que se halla dentro de una continuidad de valores permitidos, dichos valores pueden tener una extensión finita o infinita. Señal digital: son señales que solo pueden tener valores tomados de un conjunto discreto de valores, dicho termino se aplica a la transmisión de una secuencia de valores de una señal de tiempo discreto y en la cual se utiliza usualmente valores binarios (1 y 0 lógicos).
2.4. ADQUISICIÓN DE DATOS
La adquisición de datos o adquisición de señales, consiste en la toma de muestras del mundo real (sistema analógico) para generar datos que puedan ser manipulados por un ordenador u otros sistemas electrónicos (sistema digital). Consiste, en tomar un conjunto de señales físicas, convertirlas en variables eléctricas y digitalizadas y procesadas por un ordenador. Una vez adquirida la señas esta requiere una etapa de acondicionamiento, que adecua la señal a niveles compatibles con el elemento que hace la transformación a señal digital. El elemento que hace dicha transformación es el módulo de Digitalización o tarjeta de Adquisición de Datos (DAQ). El proceso de adquisición de datos presenta las siguientes etapas:
16
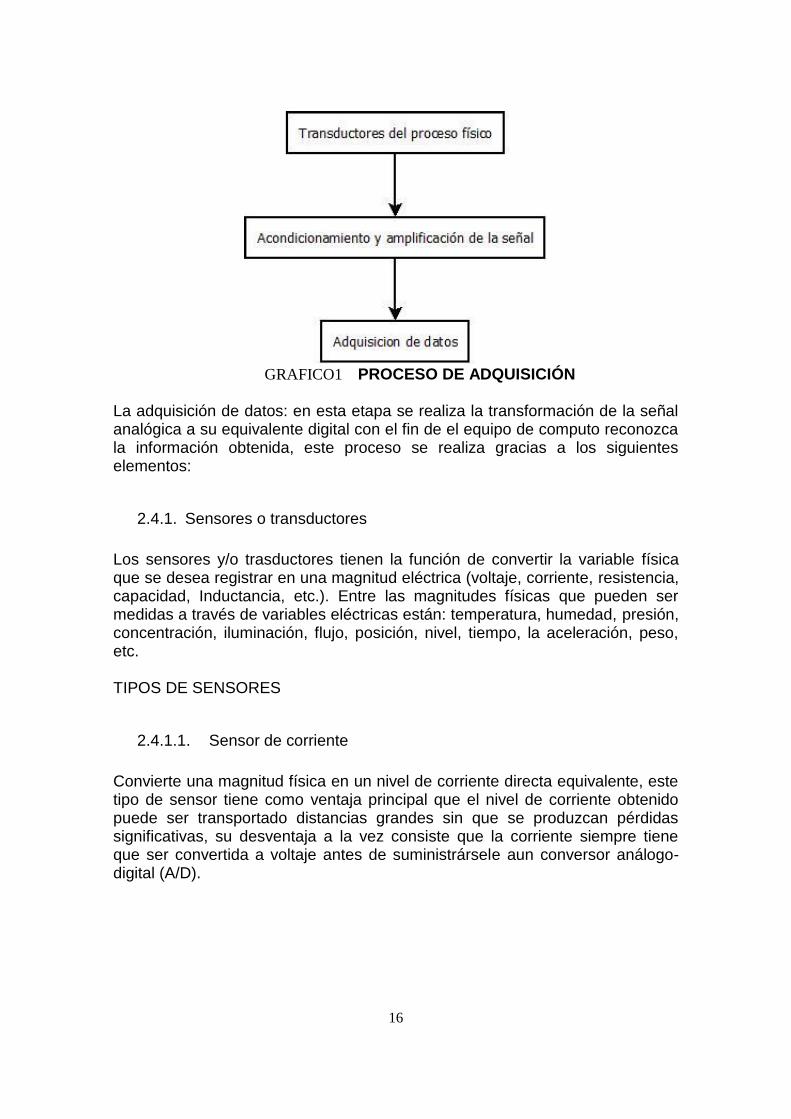
GRAFICO1 PROCESO DE ADQUISICIÓN
La adquisición de datos: en esta etapa se realiza la transformación de la señal analógica a su equivalente digital con el fin de el equipo de computo reconozca la información obtenida, este proceso se realiza gracias a los siguientes elementos:
2.4.1. Sensores o transductores
Los sensores y/o trasductores tienen la función de convertir la variable física que se desea registrar en una magnitud eléctrica (voltaje, corriente, resistencia, capacidad, Inductancia, etc.). Entre las magnitudes físicas que pueden ser medidas a través de variables eléctricas están: temperatura, humedad, presión, concentración, iluminación, flujo, posición, nivel, tiempo, la aceleración, peso, etc. TIPOS DE SENSORES
2.4.1.1. Sensor de corriente
Convierte una magnitud física en un nivel de corriente directa equivalente, este tipo de sensor tiene como ventaja principal que el nivel de corriente obtenido puede ser transportado distancias grandes sin que se produzcan pérdidas significativas, su desventaja a la vez consiste que la corriente siempre tiene que ser convertida a voltaje antes de suministrársele aun conversor análogo-digital (A/D).
17
2.4.1.2. Sensor de voltaje
Este tipo de sensor es el que entrega un nivel de voltaje equivalente a la señal física que se mide, normalmente los sensores industriales capaces de entregar un nivel de voltaje tienen incorporado circuitos acondicionadores, tales como Amplificadores de instrumentación y operacionales, comparadores, etc. Este tipo de sensores muchas veces incorpora resistores variables que permiten ajustar el rango de voltaje que ellos entregan al rango que nuestro conversor necesita, esta es su gran ventaja a su vez su desventaja es que la señal por ellos generada no puede ser transmitida mas haya de unos pocos metros porque sin que se produzcan perdidas en la misma.
2.4.1.3. Sensor resistivo
Este es un tipo de sensor que convierte la variación de una señal física en una variación de resistencia, entre los más comunes tenemos las termoresistencias. El inconveniente de este tipo de sensor es que se debe utilizar un puente de Wheastone en algunas de sus variantes para convertir la variación de resistencia en una variación de voltaje. De los sensores que hay en el mercado para el proyecto se utilizarán fotocompuertas, las cuales se especificarán acontinuación:
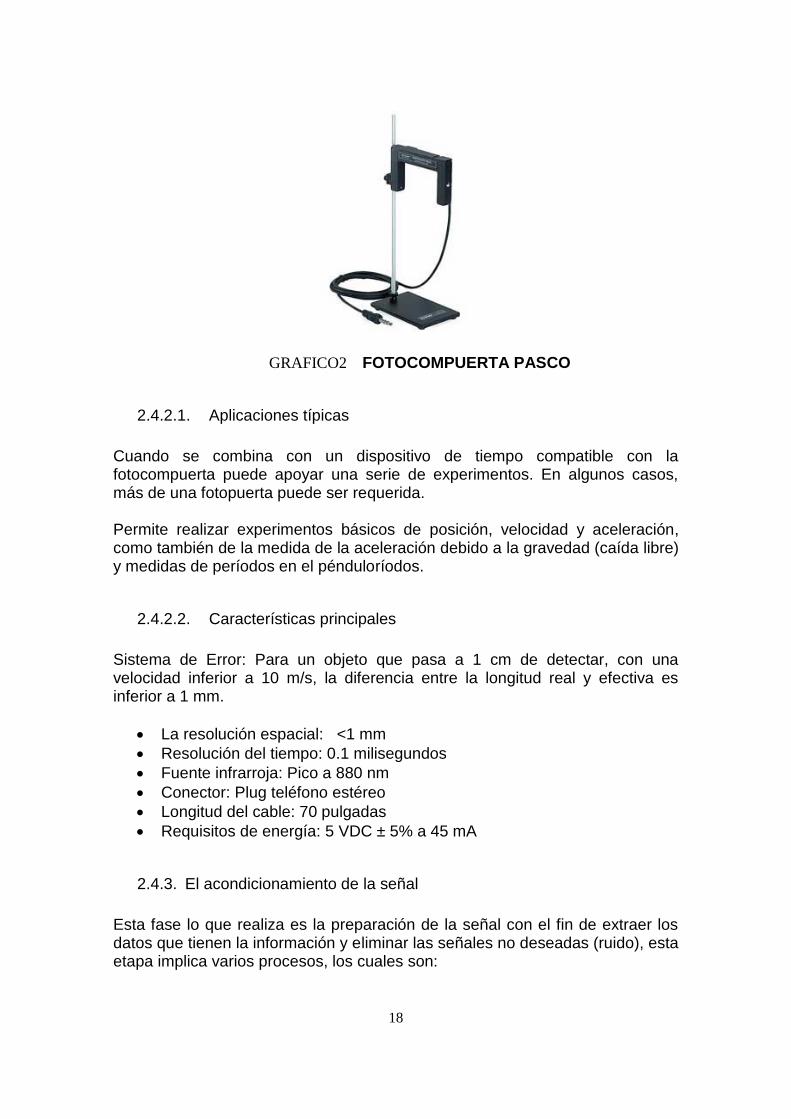
2.4.2. 1Fotocompuerta pasco
accesorio es la forma más fácil de controlar casi cualquier movimiento experimento. Utilizar hasta cuatro photogates con una interfaz de ScienceWorkshop 750 y hasta dos photogates con una interfaz de ScienceWorkshop 500. Para las interfaces PASPORT, utilice uno o dos photogates con cada adaptador digital (PS-2159). Se conecta directamente en cualquiera de los temporizador inteligente (ME-8930) o Timer fotocompuerta (ME-9215B). Base, varilla de soporte y montaje giratorio están incluidos.
1 http://www.pasco.com/prodCatalog/ME/ME-9204_accessory-photogate/#specifications
18
GRAFICO2 FOTOCOMPUERTA PASCO
2.4.2.1. Aplicaciones típicas
Cuando se combina con un dispositivo de tiempo compatible con la fotocompuerta puede apoyar una serie de experimentos. En algunos casos, más de una fotopuerta puede ser requerida. Permite realizar experimentos básicos de posición, velocidad y aceleración, como también de la medida de la aceleración debido a la gravedad (caída libre) y medidas de períodos en el pénduloríodos.
2.4.2.2. Características principales
Sistema de Error: Para un objeto que pasa a 1 cm de detectar, con una velocidad inferior a 10 m/s, la diferencia entre la longitud real y efectiva es inferior a 1 mm.
La resolución espacial: <1 mm
Resolución del tiempo: 0.1 milisegundos
Fuente infrarroja: Pico a 880 nm
Conector: Plug teléfono estéreo
Longitud del cable: 70 pulgadas
Requisitos de energía: 5 VDC ± 5% a 45 mA
2.4.3. El acondicionamiento de la señal
Esta fase lo que realiza es la preparación de la señal con el fin de extraer los datos que tienen la información y eliminar las señales no deseadas (ruido), esta etapa implica varios procesos, los cuales son:
19
2.4.3.1. Amplificación
La amplificación de la señal consiste en incrementar los niveles de amplitud de la señal con el fin de que esta pueda ser leída por el convertidor o tarjeta.
2.4.3.2. Aislamiento
El aislamiento de la señal garantiza la eliminación de cualquier tipo de perturbación operacional, tanto en la transmisión de la señal como también de las que se producen de por medio de los dispositivos del circuito.
2.4.3.3. Multiplexado
El multiplexado es la combinación de uno o mas canales de información a través de un solo medio, sin que estos interfieran uno con otro, utilizando un dispositivo llamado multiplexor.
2.4.3.4. Filtrado de ruido
El filtrado de la señal permite eliminar o reducir las señales no deseadas que se adhieren al sistema.
2.4.4. Conversión a/d y d/a
Es un dispositivo que se encarga de convertir una entrada analógica de voltaje en un binario, dicho proceso se realiza por el muestreo de la señal, realiza una discretización tanto en el dominio temporal como en el de la amplitud. El resultado es una secuencia de N números x(n) que indican la amplitud que tenía la señal analógica en el instante de muestreo. El índice n nos indica el numero de la muestra que irá desde el instante inicial, n=0, hasta el instante final, N-1. Las muestras se toman cada periodo de muestreo, Ts segundos. Es el denominado muestreo uniforme.
2.4.5. Selección y/o extracción de parámetros
Consiste en definir los datos cuantificables del conjunto de la señal obtenida. Esta fase se realiza dentro del equipo de cómputo, con el fin realizar operaciones sobre la información digital obtenida, los cuales son algoritmos que permiten diagnosticar situaciones y otorgarles un significado.
20
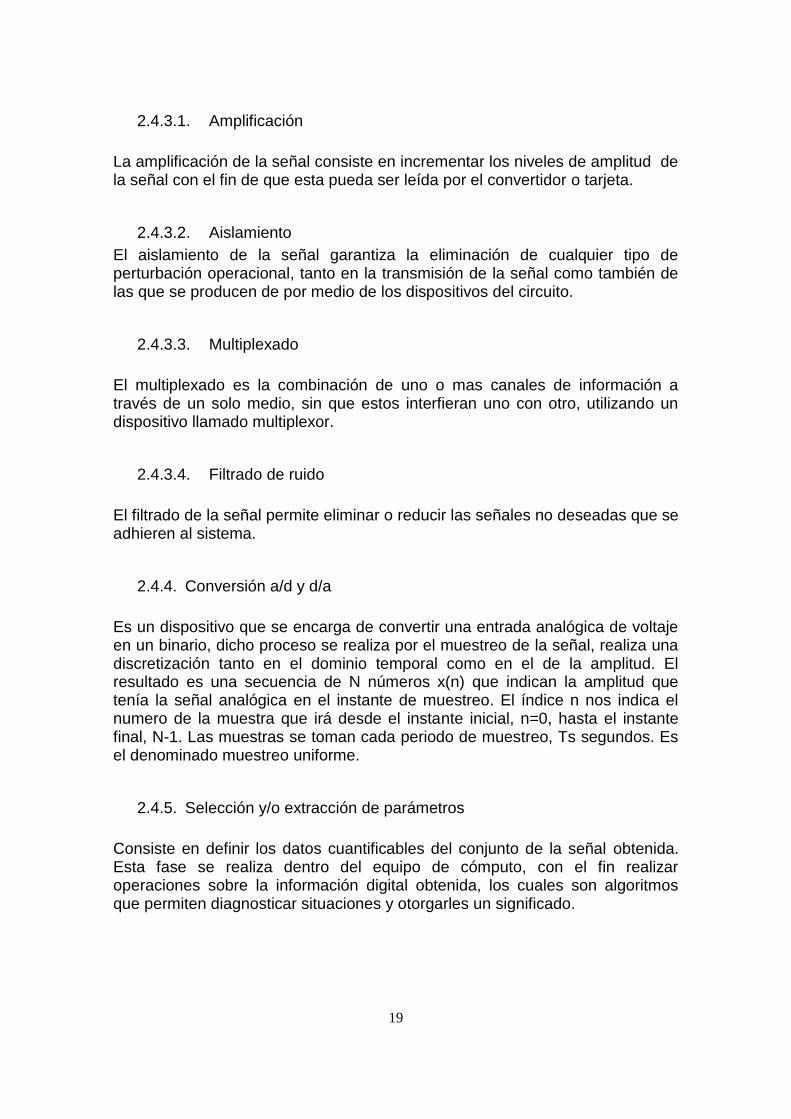
2.5. TARJETA DE ADQUISICIÓN
2La tarjeta de adquisición con que se va a sustentar el proyecto es una National Instruments modelo 6009.
GRAFICO3 D.A.Q NATIONAL INSTRUMENTS 6009 El USB-6009 de National Instruments brinda funcionalidad de adquisición de datos básica para aplicaciones como registro de datos simple, medidas portátiles y experimentos académicos de laboratorio. Es accesible para uso de estudiantes y lo suficientemente poderoso para aplicaciones de medida más sofisticadas. Para usuarios de Mac OS X y Linux, descargue el software NI-DAQmx Base y programe el USB-6009 con LabVIEW o C. Para un muestreo más rápido, medidas más precisas, soporte para calibración y mayor número de canales, considere los dispositivos de adquisición de datos de alto rendimiento energizados por bus USB, NI USB-6210 y NI USB-6211. Las siguientes son las especificaciones técnicas:
8 entradas analógicas (14 bits, 48 kS/s).
2 salidas analógicas (12 bits a 150 S/s), 12 E/S digitales; contador de 32 bits.
Energizado por bus para una mayor movilidad, conectividad de señal integrada.
La versión OEM está disponible.
Compatible con LabVIEW, LabWindows/CVI y Measurement Studio para Visual Studio .NET
Software controlador NI-DAQmx y software interactivo NI LabVIEW SignalExpress LE para registro de datos.
En el desarrollo de las practicas se hace necesario el control de algunas parámetros que hacen posible que la práctica se desarrolle de manera correcta, sin que sean considerados como variables al interior de la prueba,
2 http://sine.ni.com/nips/cds/print/p/lang/es/nid/201987
21
como por ejemplo el encendido y apagado de un compresor que proporciona al carril un colchón de aire que impide que en el fenómeno se presente rozamiento. En algunos casos el control de estos parámetros se realiza con la ayuda de dispositivos denominador Microcontroladores.
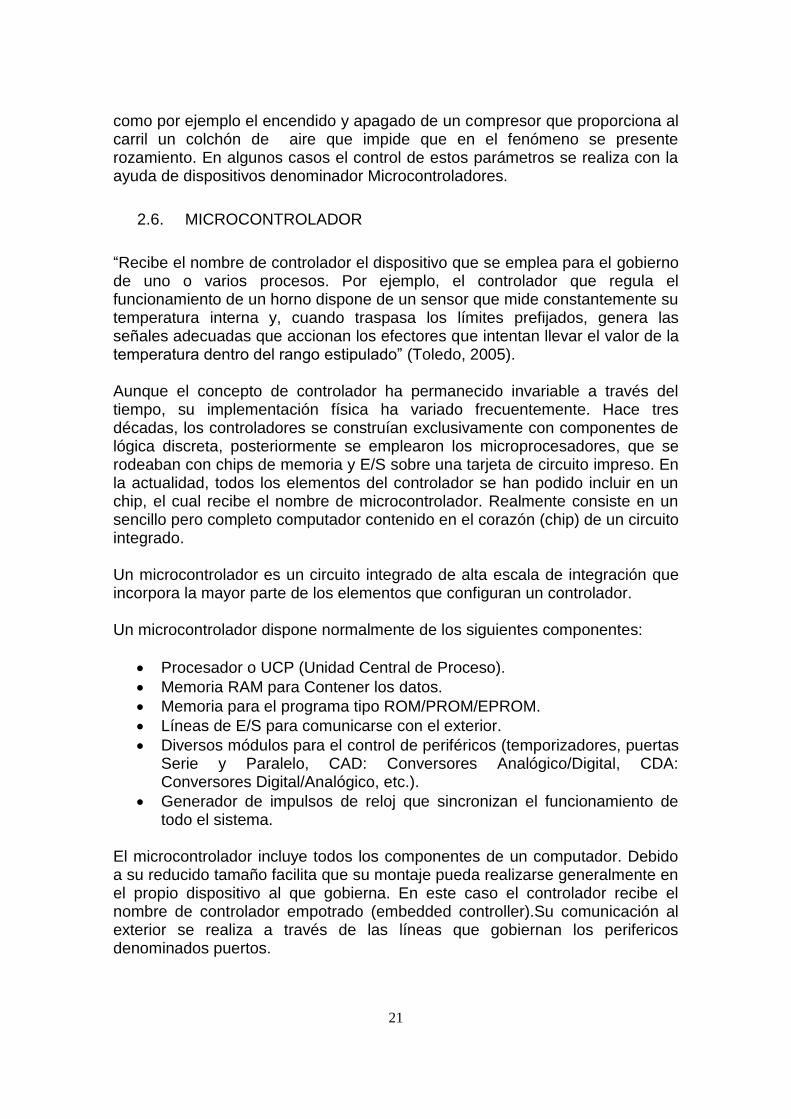
2.6. MICROCONTROLADOR
“Recibe el nombre de controlador el dispositivo que se emplea para el gobierno de uno o varios procesos. Por ejemplo, el controlador que regula el funcionamiento de un horno dispone de un sensor que mide constantemente su temperatura interna y, cuando traspasa los límites prefijados, genera las señales adecuadas que accionan los efectores que intentan llevar el valor de la temperatura dentro del rango estipulado” (Toledo, 2005). Aunque el concepto de controlador ha permanecido invariable a través del tiempo, su implementación física ha variado frecuentemente. Hace tres décadas, los controladores se construían exclusivamente con componentes de lógica discreta, posteriormente se emplearon los microprocesadores, que se rodeaban con chips de memoria y E/S sobre una tarjeta de circuito impreso. En la actualidad, todos los elementos del controlador se han podido incluir en un chip, el cual recibe el nombre de microcontrolador. Realmente consiste en un sencillo pero completo computador contenido en el corazón (chip) de un circuito integrado. Un microcontrolador es un circuito integrado de alta escala de integración que incorpora la mayor parte de los elementos que configuran un controlador. Un microcontrolador dispone normalmente de los siguientes componentes:
Procesador o UCP (Unidad Central de Proceso).
Memoria RAM para Contener los datos.
Memoria para el programa tipo ROM/PROM/EPROM.
Líneas de E/S para comunicarse con el exterior.
Diversos módulos para el control de periféricos (temporizadores, puertas Serie y Paralelo, CAD: Conversores Analógico/Digital, CDA: Conversores Digital/Analógico, etc.).
Generador de impulsos de reloj que sincronizan el funcionamiento de todo el sistema.
El microcontrolador incluye todos los componentes de un computador. Debido a su reducido tamaño facilita que su montaje pueda realizarse generalmente en el propio dispositivo al que gobierna. En este caso el controlador recibe el nombre de controlador empotrado (embedded controller).Su comunicación al exterior se realiza a través de las líneas que gobiernan los perifericos denominados puertos.
22
GRAFICO4 PROCESO DE UN MICROCONTROLADOR
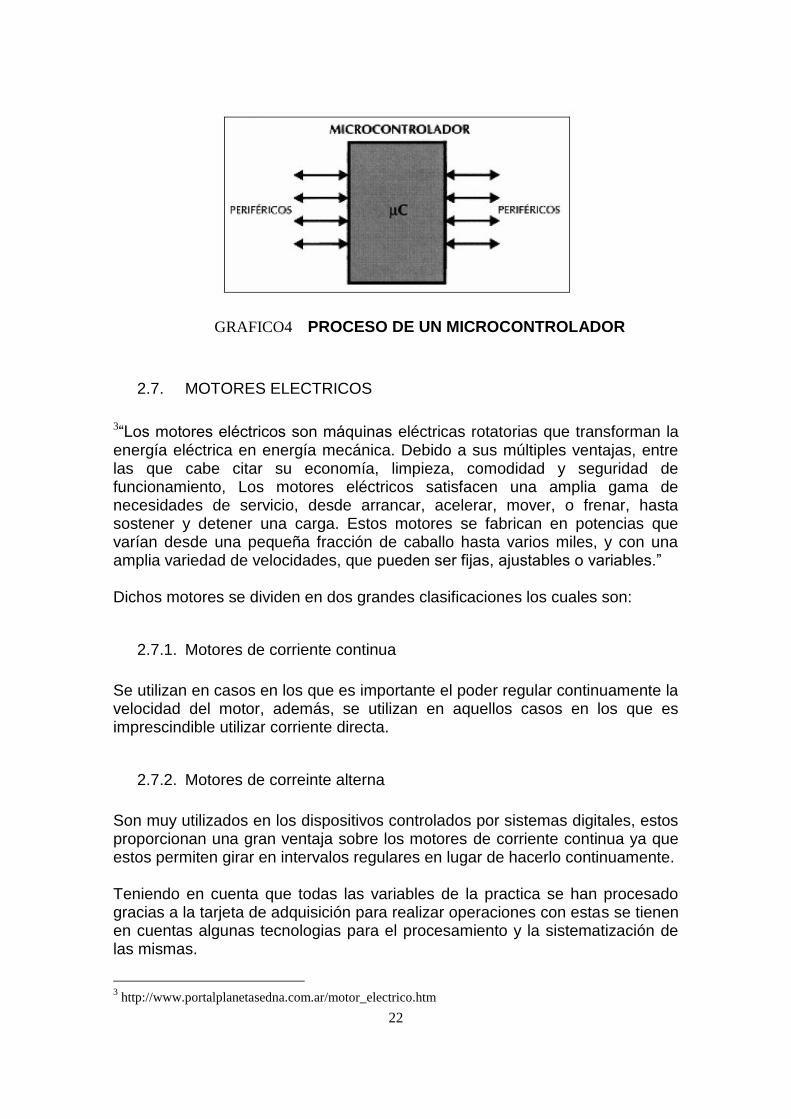
2.7. MOTORES ELECTRICOS
3“Los motores eléctricos son máquinas eléctricas rotatorias que transforman la energía eléctrica en energía mecánica. Debido a sus múltiples ventajas, entre las que cabe citar su economía, limpieza, comodidad y seguridad de funcionamiento, Los motores eléctricos satisfacen una amplia gama de necesidades de servicio, desde arrancar, acelerar, mover, o frenar, hasta sostener y detener una carga. Estos motores se fabrican en potencias que varían desde una pequeña fracción de caballo hasta varios miles, y con una amplia variedad de velocidades, que pueden ser fijas, ajustables o variables.” Dichos motores se dividen en dos grandes clasificaciones los cuales son:
2.7.1. Motores de corriente continua
Se utilizan en casos en los que es importante el poder regular continuamente la velocidad del motor, además, se utilizan en aquellos casos en los que es imprescindible utilizar corriente directa.
2.7.2. Motores de correinte alterna
Son muy utilizados en los dispositivos controlados por sistemas digitales, estos proporcionan una gran ventaja sobre los motores de corriente continua ya que estos permiten girar en intervalos regulares en lugar de hacerlo continuamente. Teniendo en cuenta que todas las variables de la practica se han procesado gracias a la tarjeta de adquisición para realizar operaciones con estas se tienen en cuentas algunas tecnologias para el procesamiento y la sistematización de las mismas.
3 http://www.portalplanetasedna.com.ar/motor_electrico.htm
23
2.8. C#
4Es un lenguaje orientado a objetos y con seguridad de tipos que permite a los desarrolladores compilar diversas aplicaciones sólidas y seguras que se ejecutan en .NET Framework. Se puede utilizar C# para crear aplicaciones cliente de Windows tradicionales, servicios Web XML, componentes distribuidos, aplicaciones cliente-servidor, aplicaciones de base de datos, y mucho, mucho más.
2.9. MySql
Es un sistema de gestión de bases de datos (SGBD) multiusuario, multiplataforma y de código abierto, está escrito en C y C++, Emplea el lenguaje SQL para consultas a la base de datos.
2.10. MySql-connector
Es un software que su función es servir como puente entre el sistema gestor de base de datos y el lenguaje de programación con el fin de que se pueda manipular la información manejada en este entorno.
2.11. NIDAQ
Es el controlador que permite manejar la tarjeta de adquisición desde el software que se está realizando.
2.12. CRYSTAL REPORTS
Es una aplicación que se utiliza para diseñar y generar informes desde un gestor de bases de datos, Microsoft Visual Studio, incluyen una versión OEM de Crystal Reports como una herramienta de propósito general del informes/reportes.
4 http://msdn.microsoft.com/library/z1zx9t92
24
2.13. VERTRIGO
5VertrigoServ ha sido desarrollado para proveer en un paquete altamente profesional y de fácil instalación el Apache (servidor HTTP), PHP (lenguaje de scripting), MySQL (Sistema de administración de bases de datos SQL multithread y multiusuario), SQLite (sistema de administración de bases de datos relacionales ACID), SQLiteManager (aplicación web multilingüe para manejo de bases de datos SQLite), PhpMyAdmin (aplicación escrita en PHP para ocuparse de la administración de MySQL) y Zend Optimizer (que incrementa el rendimiento en tiempo de ejecución en hasta un 40%) para la plataforma Windows. Con un práctico instalador todo-en-uno, todos los componentes son instalados en un solo directorio y pueden ser utilizados inmediatamente después de completado el proceso de instalación. Un des-instalador le permite remover VertigoServ del disco duro. Está diseñado para ser tan pequeño y flexible como sea posible y es en consecuencia muy apto para la distribución por Internet.
5 http://vertrigo.sourceforge.net/?lang=es
25
3. METODOLOGÍA SEGUIDA PARA EL DESARROLLO DEL PROYECTO
Para el desarrollo del software se opto por utilizar un modelo prototipado evolutivo, ya que el proyecto muestra ciertos cambios según el desarrollo de hardware que se realiza, teniendo en cuenta esto, se opto por seguir la siguiente metodología de trabajo. Para el primer prototipo se basó en el análisis y diseño estructurado según Yourdon, el cual explica de una manera más explícita el desarrollo de software para la adquisición y manejo de los datos obtenidos dentro de un sistema de información y lo más importante es que modela la administración que se manipula en tiempo real, de dicha metodología se extrajeron los siguientes elementos los cuales son los componentes que nos ayudaran a diseñar el proyecto:
3.1. DIAGRAMA DE FLUJO DE DATOS
Los diagramas de flujo (o flujogramas) son diagramas que emplean símbolos gráficos para representar los pasos o etapas de un proceso. También permiten describir la secuencia de los distintos pasos o etapas y su interacción.
3.2. DIAGRAMA ENTIDAD RELACIÓN
Denominado por sus siglas como: E-R; Este modelo representa a la realidad a través de un esquema gráfico empleando los terminología de entidades, que son objetos que existen y son los elementos principales que se identifican en el problema a resolver con el diagramado y se distinguen de otros por sus características particulares denominadas atributos, el enlace que rige la unión de las entidades está representada por la relación del modelo.
3.3. DIAGRAMA DE TRANSICIÓN DE ESTADOS
El diagrama de transición de estado (también conocido como DTE) enfatiza el comportamiento dependiente del tiempo del sistema. Este tipo de modelo sólo importaba para una categoría de sistemas conocido como sistemas de tiempo-real. Para los siguientes prototipos se partió de Proceso unificado ya que especifica un desarrollo sustentado en paradigma orientado a objetos, facilita la modelación y construcción del producto, asimismo nos permite modelar mucho mas a fondo los procesos que se realizan dentro de las practicas a trabajar, ya que esta metodología trabaja de la mano con UML (Lenguaje Unificado de Modelado), también teniendo en cuenta que ya no solo se adquiere la información del entorno sino que también se realizan diversos procesos con
26
estas, teniendo como base dicha premisa para cada fase del proyecto se realizan una serie de actividades, las cuales son: Inicio
Especificación de Requisitos Elaboración
Diagramas de caso de uso Construcción
Documento Arquitectura que trabaja con las siguientes vistas: Vista Lógica
Diagrama de clases
Modelo E-R (Si el sistema así lo requiere)

27
4. DESARROLLO DEL PROYECTO
DESARROLLO DE LA PRUEBA
4.1. CARRIL DE AIRE
6El carril de Aire es un dispositivo de laboratorio utilizado para estudiar las colisiones y movimiento en una dimensión. El riel consta de un tubo de sección transversal cuadrada con una serie de perforaciones por las que sale aire a presión. Sobre el riel se colocan carros que se deslizan sobre un colchón de aire que se forma entre el riel y el carro. Los carros se mueven en esencia sin fricción. Sobre los carros se colocan pesos para experimentar el choque de objetos de diferente masa. El carril de aire permite modificar los parámetros más importantes: masas, velocidades iniciales y coeficiente de restitución, pudiéndose llevar a cabo una gran variedad de experimentos con choque elásticos, no elásticos y perfectamente inelásticos. A continuación se mostrará un carril de aire, con la descripción de sus partes:
GRAFICO5 CARRIL DE AIRE
4.2. PARTES DEL CARRIL DE AIRE
Según lo especificado en el GRAFICO5 CARRIL DE AIRE sus partes son:
6 http://galia.fc.uaslp.mx/~medellin/Applets/riel/Riel.htm
28
4.2.1. Fuente ó compresor
Es el encargado de generar el aire que se ingresará al carril de aire, este dispositivo tiene un potenciómetro el cual se encarga de regular la cantidad de aire que se quiere entregar al dispositivo, esto con el fin de generar varios niveles de resistencia al carro deslizador.
4.2.2. Riel de aire
Es el encargado de encausar el aire para que este genere el estado de levitación al carro deslizador.
4.2.3. Fotocompuertas
Son los encargados de medir los tiempos dentro del sistema, estos inician los procesos de medición cuando el deslizador pasa por el primer sensor y para el contador cuando este pase por el segundo sensor.
4.2.4. Carro deslizador
Es el que se encarga de ejecutar toda la practica ya que este es el que manipula los sensores dependiendo de la variación en su velocidad.
4.2.5. Disparador
Este dispositivo tiene como función imprimirle la velocidad inicial con que se va a mover el carro deslizador dentro del riel de aire.
4.3. ANTECEDENTES DE LAS PRÁCTICAS
4.3.1. Movimiento uniforme
La practica de movimiento uniforme se lleva a cabo de la siguente manera:
Se enciende el compresor y se estandariza la cantidad de aire que se quiere implementar para la práctica.
Se coloca el deslizador en el riel y se fija con el disparador.
Coloque el fotosensor con cronómetro a la par de la pantalla, esta será la posición del origen “0”. Coloque el segundo fotosensor a 0,30 m del origen. Asegúrese de que la cuerda esté paralela a la superficie de la mesa y el modo de operación del fotosensor sea PULSE.
29
Suelte el carrito mediante el disparador y mida el tiempo (Tp) que tarda en recorrer los primeros 0,30 m. Anótelo.
En papel cuadriculado milimétrico, construya la gráfica de desplazamiento “d” en función del tiempo de recorrido “Tp” (d contra. Tp.)
Determine la ecuación empírica que describe la curva de la gráfica anterior (utilice alguno de los métodos conocidos: papel logarítmico o cambio de variable.)
4.3.2. Movimiento uniformemente acelerado
Se fija el riel de aire sobre la mesa del laboratorio, dándole una inclinación de 15 ° respecto a la horizontal.
Se coloca una hoja de papel sobre el deslizador de 16 cm de longitud.
Se deja caer el deslizador desde el extremo del riel (en todas las medidas se repetirán las condiciones iniciales).
Con el timer se mide el tiempo en que tarda el deslizador en pasar por la compuerta.
Posteriormente se cambia la longitud de la hoja de papel a 12 cm y se mide el tiempo respectivamente. Las longitudes de la hoja se van haciendo cada vez más pequeñas y por consiguiente los intervalos de tiempo son menores.
En una tabla se colocan las distancias y los tiempos obtenidos y se va calculando la velocidad del deslizador con la fórmula V = distancia / tiempo y al analizar los resultados se observa que los cocientes tienden a un valor que físicamente corresponde a la velocidad instantánea, pero desde el punto de vista matemático estamos calculando la derivada de la función de posición con respecto al tiempo del deslizador.
Si se quiere explicitar la función de la posición debemos tomar en cuenta que es un movimiento acelerando con una velocidad inicial cero, donde la aceleración es igual a la aceleración de la gravedad por el seno del ángulo que forma el riel con respecto a la horizontal.
4.4. PUESTA EN MARCHA DEL SISTEMA LOCAL
El software local se inicia con un formulario de verificación, la función de dicho formulario es que el estudiante se pueda validar antes de ingresar a realizar la práctica, así como lo muestra la siguiente imagen:

30
GRAFICO6 FORMULARIO DE VALIDACIÓN Al iniciar de práctica, si el estudiante no se encuentra registrado, este debe de registrarse ingresando en el formulario de registro como se muestra en la siguiente imagen:
GRAFICO7 FORMULARIO DE REGISTRO Dentro de este formulario se realiza la conexión entre C# y la base de datos, este procedimiento se realiza de la siguiente manera:
31
Se instala el driver (mysql-connector-net-6.4.3) este nos permitirá realizar la conexión entre el programa y la base de datos.
El siguiente paso es agregar la referencia del gestor de la base de datos dentro del formulario de C#, esto se realiza así:
Se abre el formulario principal, en la parte superior derecha se encuentra la carpeta de References.
Se da clic derecho sobre la carpeta References y luego selecciona la opción Add References.
Luego de que salga la nueva ventana se busca la referencia MySql.Data.
Luego se ingresa al código del formulario y en el inicio del código donde se agregan las cabeceras se escriben estas dos: - using MySql.Data; - using MySql.Data.MySqlClient;
Después de esto ya se puede realizar la manipulación de la base de datos desde C#.
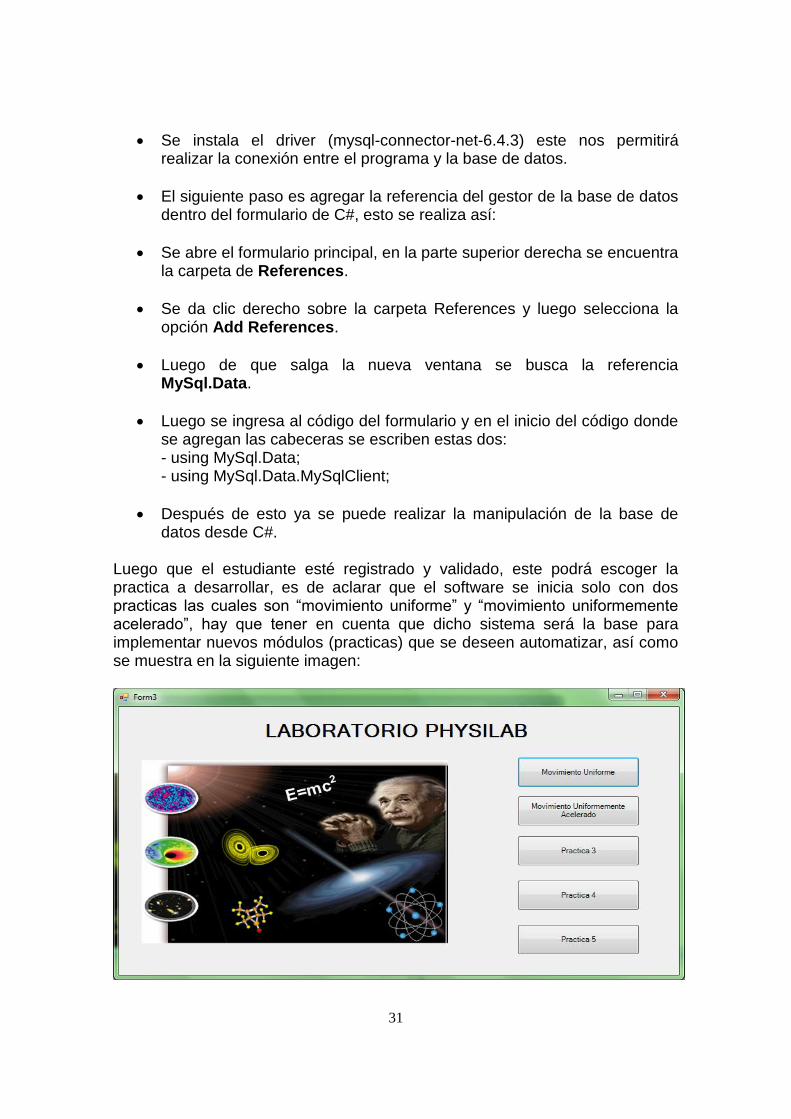
Luego que el estudiante esté registrado y validado, este podrá escoger la practica a desarrollar, es de aclarar que el software se inicia solo con dos practicas las cuales son “movimiento uniforme” y “movimiento uniformemente acelerado”, hay que tener en cuenta que dicho sistema será la base para implementar nuevos módulos (practicas) que se deseen automatizar, así como se muestra en la siguiente imagen:
32
GRAFICO8 FORMULARIO DE SELECCIÓN DE PRACTICA
4.5. RECEPCIÓN Y ENVÍO DE LA INFORMACIÓN POR MEDIO DE LA TARJETA DE ADQUISICIÓN
4.6. PRÁCTICA DE MOVIMIENTO UNIFORME CON EL SISTEMA
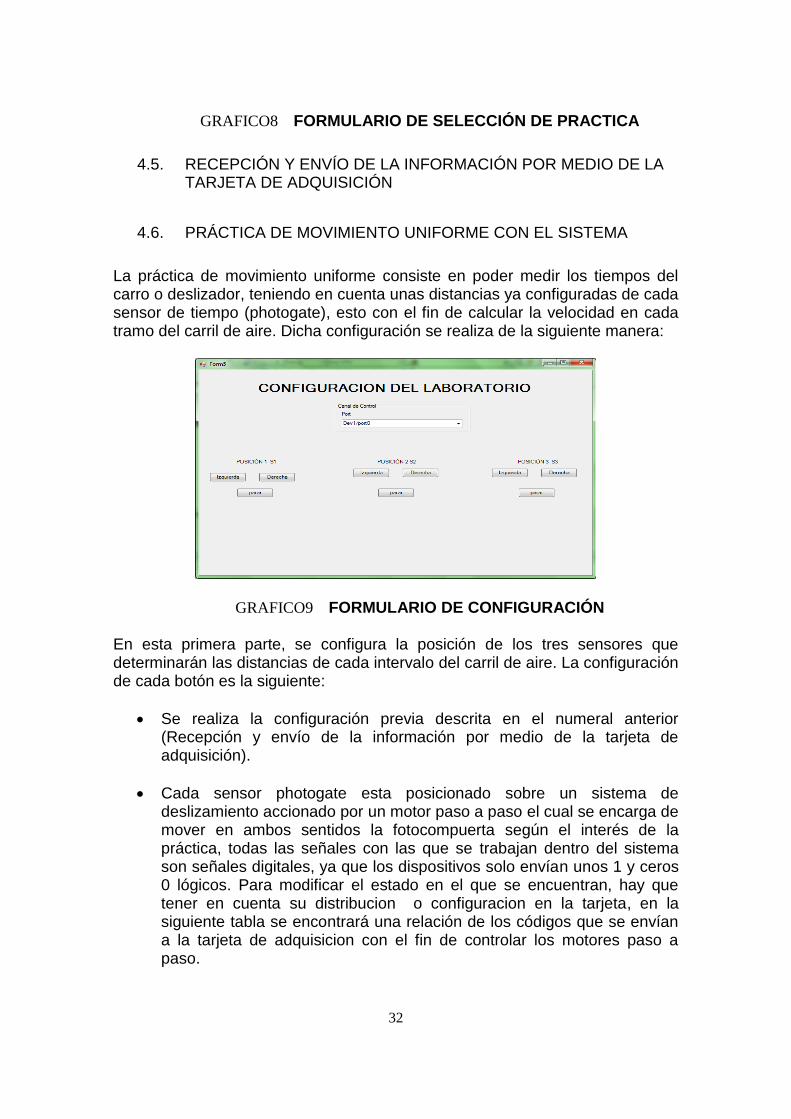
La práctica de movimiento uniforme consiste en poder medir los tiempos del carro o deslizador, teniendo en cuenta unas distancias ya configuradas de cada sensor de tiempo (photogate), esto con el fin de calcular la velocidad en cada tramo del carril de aire. Dicha configuración se realiza de la siguiente manera:
GRAFICO9 FORMULARIO DE CONFIGURACIÓN
En esta primera parte, se configura la posición de los tres sensores que determinarán las distancias de cada intervalo del carril de aire. La configuración de cada botón es la siguiente:
Se realiza la configuración previa descrita en el numeral anterior (Recepción y envío de la información por medio de la tarjeta de adquisición).
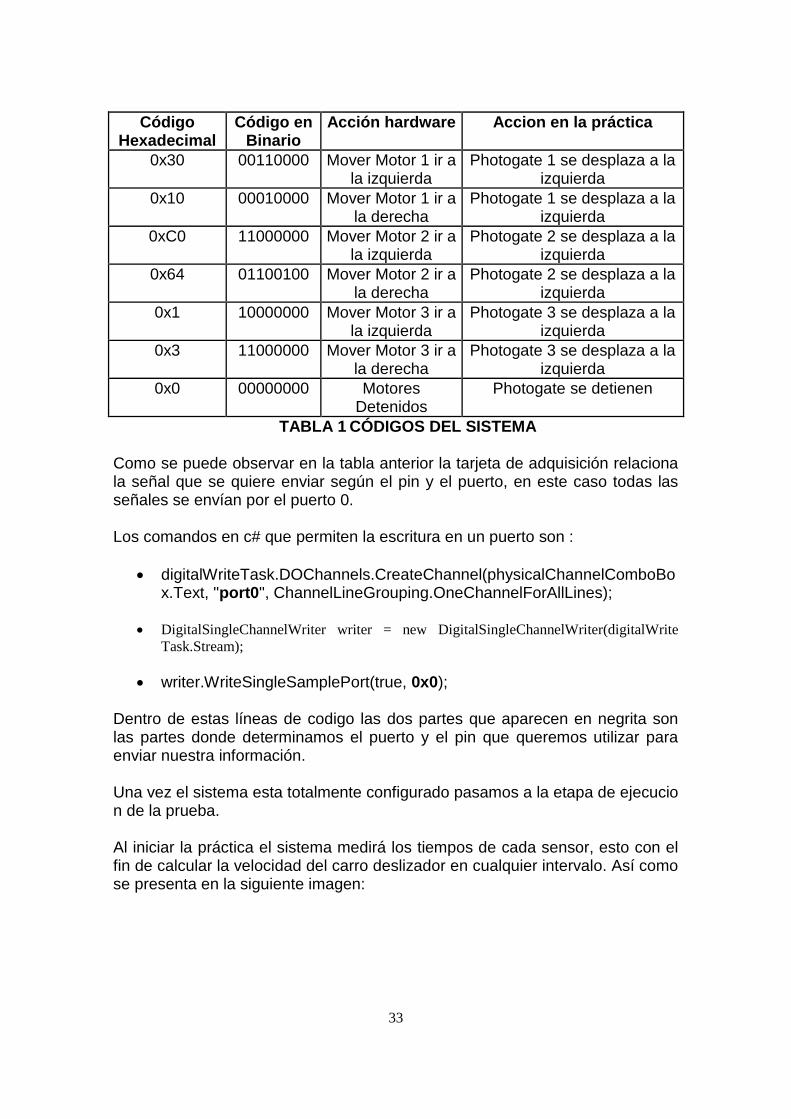
Cada sensor photogate esta posicionado sobre un sistema de deslizamiento accionado por un motor paso a paso el cual se encarga de mover en ambos sentidos la fotocompuerta según el interés de la práctica, todas las señales con las que se trabajan dentro del sistema son señales digitales, ya que los dispositivos solo envían unos 1 y ceros 0 lógicos. Para modificar el estado en el que se encuentran, hay que tener en cuenta su distribucion o configuracion en la tarjeta, en la siguiente tabla se encontrará una relación de los códigos que se envían a la tarjeta de adquisicion con el fin de controlar los motores paso a paso.
33
Código Hexadecimal
Código en Binario
Acción hardware Accion en la práctica
0x30 00110000 Mover Motor 1 ir a la izquierda
Photogate 1 se desplaza a la izquierda
0x10 00010000 Mover Motor 1 ir a la derecha
Photogate 1 se desplaza a la izquierda
0xC0 11000000 Mover Motor 2 ir a la izquierda
Photogate 2 se desplaza a la izquierda
0x64 01100100 Mover Motor 2 ir a la derecha
Photogate 2 se desplaza a la izquierda
0x1 10000000 Mover Motor 3 ir a la izquierda
Photogate 3 se desplaza a la izquierda
0x3 11000000 Mover Motor 3 ir a la derecha
Photogate 3 se desplaza a la izquierda
0x0 00000000 Motores Detenidos
Photogate se detienen
TABLA 1 CÓDIGOS DEL SISTEMA Como se puede observar en la tabla anterior la tarjeta de adquisición relaciona la señal que se quiere enviar según el pin y el puerto, en este caso todas las señales se envían por el puerto 0. Los comandos en c# que permiten la escritura en un puerto son :
digitalWriteTask.DOChannels.CreateChannel(physicalChannelComboBox.Text, "port0", ChannelLineGrouping.OneChannelForAllLines);
DigitalSingleChannelWriter writer = new DigitalSingleChannelWriter(digitalWrite
Task.Stream);
writer.WriteSingleSamplePort(true, 0x0); Dentro de estas líneas de codigo las dos partes que aparecen en negrita son las partes donde determinamos el puerto y el pin que queremos utilizar para enviar nuestra información. Una vez el sistema esta totalmente configurado pasamos a la etapa de ejecucio n de la prueba. Al iniciar la práctica el sistema medirá los tiempos de cada sensor, esto con el fin de calcular la velocidad del carro deslizador en cualquier intervalo. Así como se presenta en la siguiente imagen:
34
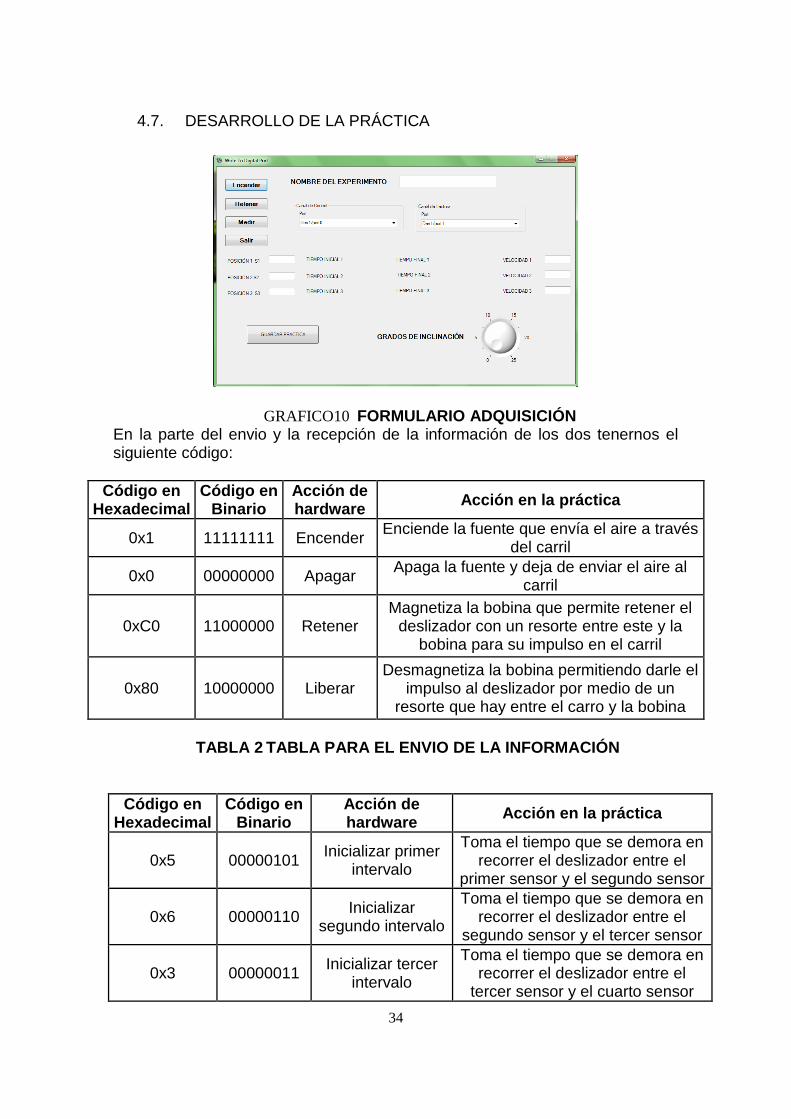
4.7. DESARROLLO DE LA PRÁCTICA
GRAFICO10 FORMULARIO ADQUISICIÓN En la parte del envio y la recepción de la información de los dos tenernos el siguiente código:
Código en Hexadecimal
Código en Binario
Acción de hardware
Acción en la práctica
0x1 11111111 Encender Enciende la fuente que envía el aire a través
del carril
0x0 00000000 Apagar Apaga la fuente y deja de enviar el aire al
carril
0xC0 11000000 Retener Magnetiza la bobina que permite retener el
deslizador con un resorte entre este y la bobina para su impulso en el carril
0x80 10000000 Liberar Desmagnetiza la bobina permitiendo darle el
impulso al deslizador por medio de un resorte que hay entre el carro y la bobina
TABLA 2 TABLA PARA EL ENVIO DE LA INFORMACIÓN
Código en Hexadecimal
Código en Binario
Acción de hardware
Acción en la práctica
0x5 00000101 Inicializar primer
intervalo
Toma el tiempo que se demora en recorrer el deslizador entre el
primer sensor y el segundo sensor
0x6 00000110 Inicializar
segundo intervalo
Toma el tiempo que se demora en recorrer el deslizador entre el
segundo sensor y el tercer sensor
0x3 00000011 Inicializar tercer
intervalo
Toma el tiempo que se demora en recorrer el deslizador entre el
tercer sensor y el cuarto sensor
35
TABLA 3 TABLA PARA LA RECEPCION DE LA INFORMACIÓN
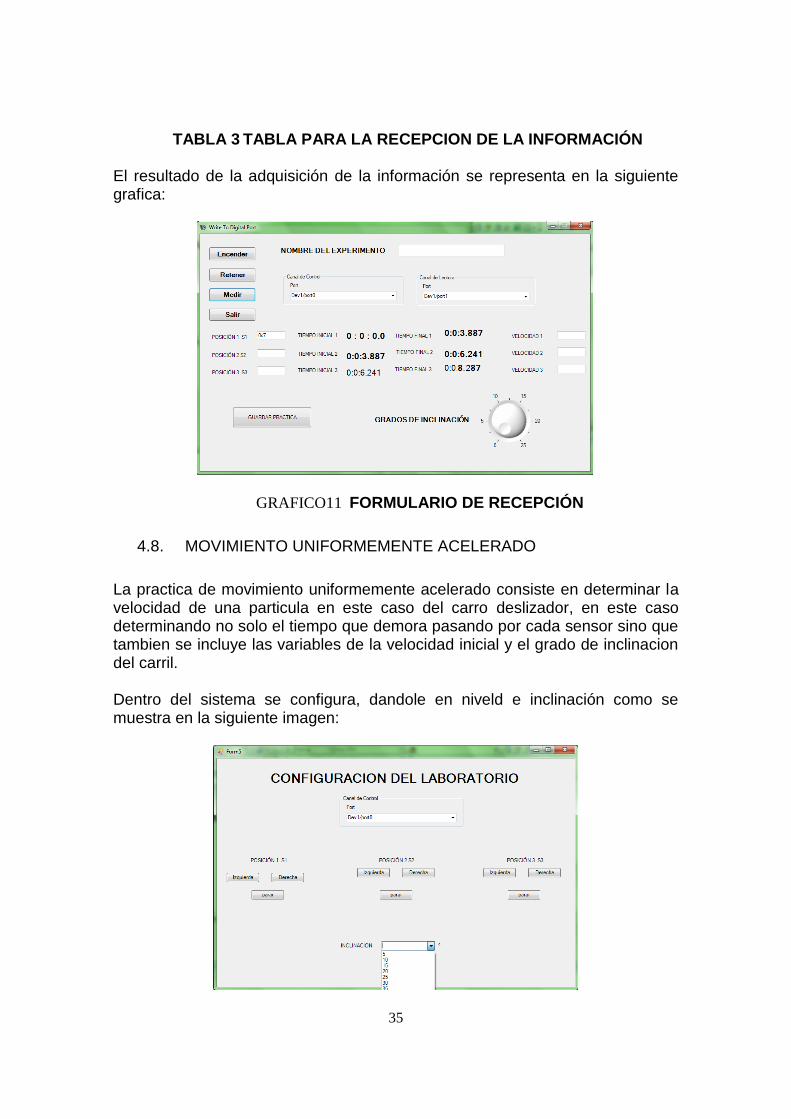
El resultado de la adquisición de la información se representa en la siguiente grafica:
GRAFICO11 FORMULARIO DE RECEPCIÓN
4.8. MOVIMIENTO UNIFORMEMENTE ACELERADO
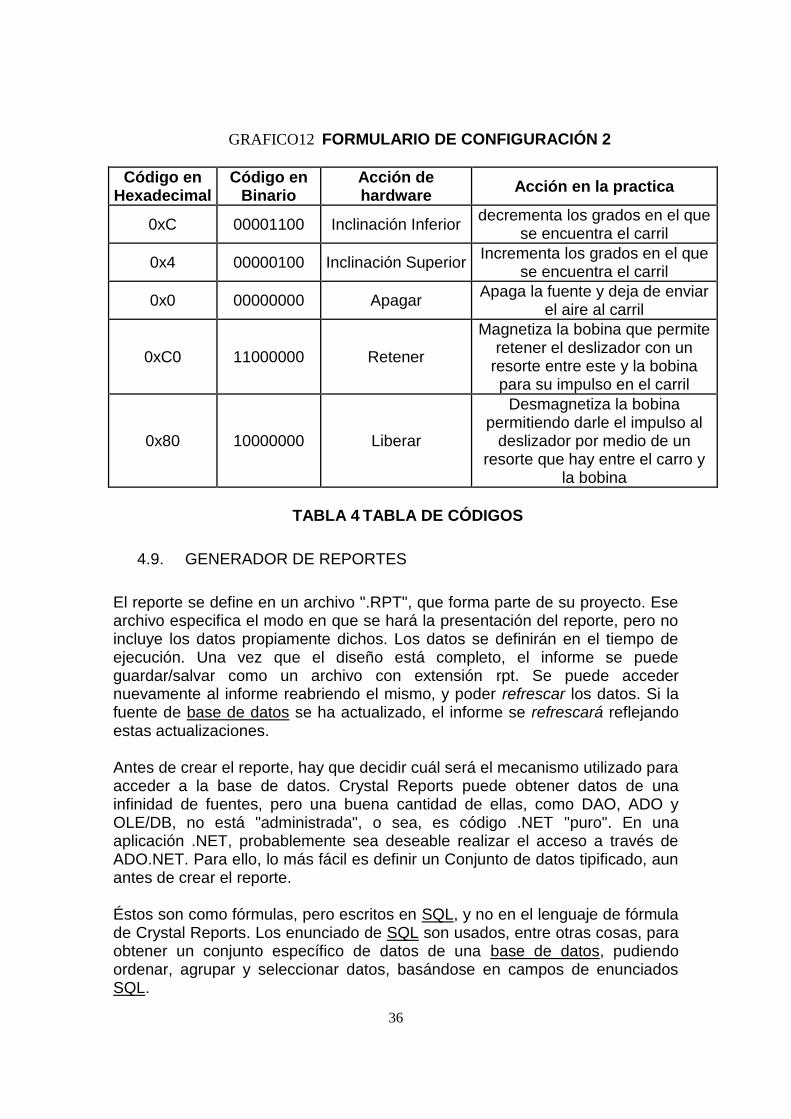
La practica de movimiento uniformemente acelerado consiste en determinar la velocidad de una particula en este caso del carro deslizador, en este caso determinando no solo el tiempo que demora pasando por cada sensor sino que tambien se incluye las variables de la velocidad inicial y el grado de inclinacion del carril. Dentro del sistema se configura, dandole en niveld e inclinación como se muestra en la siguiente imagen:
36
GRAFICO12 FORMULARIO DE CONFIGURACIÓN 2
Código en Hexadecimal
Código en Binario
Acción de hardware
Acción en la practica
0xC 00001100 Inclinación Inferior decrementa los grados en el que
se encuentra el carril
0x4 00000100 Inclinación Superior Incrementa los grados en el que
se encuentra el carril
0x0 00000000 Apagar Apaga la fuente y deja de enviar
el aire al carril
0xC0 11000000 Retener
Magnetiza la bobina que permite retener el deslizador con un
resorte entre este y la bobina para su impulso en el carril
0x80 10000000 Liberar
Desmagnetiza la bobina permitiendo darle el impulso al
deslizador por medio de un resorte que hay entre el carro y
la bobina
TABLA 4 TABLA DE CÓDIGOS
4.9. GENERADOR DE REPORTES
El reporte se define en un archivo ".RPT", que forma parte de su proyecto. Ese archivo especifica el modo en que se hará la presentación del reporte, pero no incluye los datos propiamente dichos. Los datos se definirán en el tiempo de ejecución. Una vez que el diseño está completo, el informe se puede guardar/salvar como un archivo con extensión rpt. Se puede acceder nuevamente al informe reabriendo el mismo, y poder refrescar los datos. Si la fuente de base de datos se ha actualizado, el informe se refrescará reflejando estas actualizaciones. Antes de crear el reporte, hay que decidir cuál será el mecanismo utilizado para acceder a la base de datos. Crystal Reports puede obtener datos de una infinidad de fuentes, pero una buena cantidad de ellas, como DAO, ADO y OLE/DB, no está "administrada", o sea, es código .NET "puro". En una aplicación .NET, probablemente sea deseable realizar el acceso a través de ADO.NET. Para ello, lo más fácil es definir un Conjunto de datos tipificado, aun antes de crear el reporte. Éstos son como fórmulas, pero escritos en SQL, y no en el lenguaje de fórmula de Crystal Reports. Los enunciado de SQL son usados, entre otras cosas, para obtener un conjunto específico de datos de una base de datos, pudiendo ordenar, agrupar y seleccionar datos, basándose en campos de enunciados SQL.
37
Los campos de enunciado SQL, son de utilidad a la hora de optimizar el rendimiento de los informes, ya que las tareas que ejecutan se realizan normalmente en el servidor de la base de datos, en contraposición con una fórmula regular que a veces se ejecuta en el equipo local. Tanto la sintaxis Crystal (nativa de Crystal Reports), como la sintaxis Basic permiten mejorar y precisar las fórmulas de tal forma que sería difícil o imposible hacerlo con SQL. En algunas circunstancias, sin embargo, la creación y el uso de campos de enunciados SQL pueden acelerar en el proceso de los informes.
4.10. EN EL DESARROLLO DEL SOFTWARE
Para tener una buena metodología en el desarrollo de software se basaron en dos componentes los cuales son:
4.10.1. Metodología de yourdon
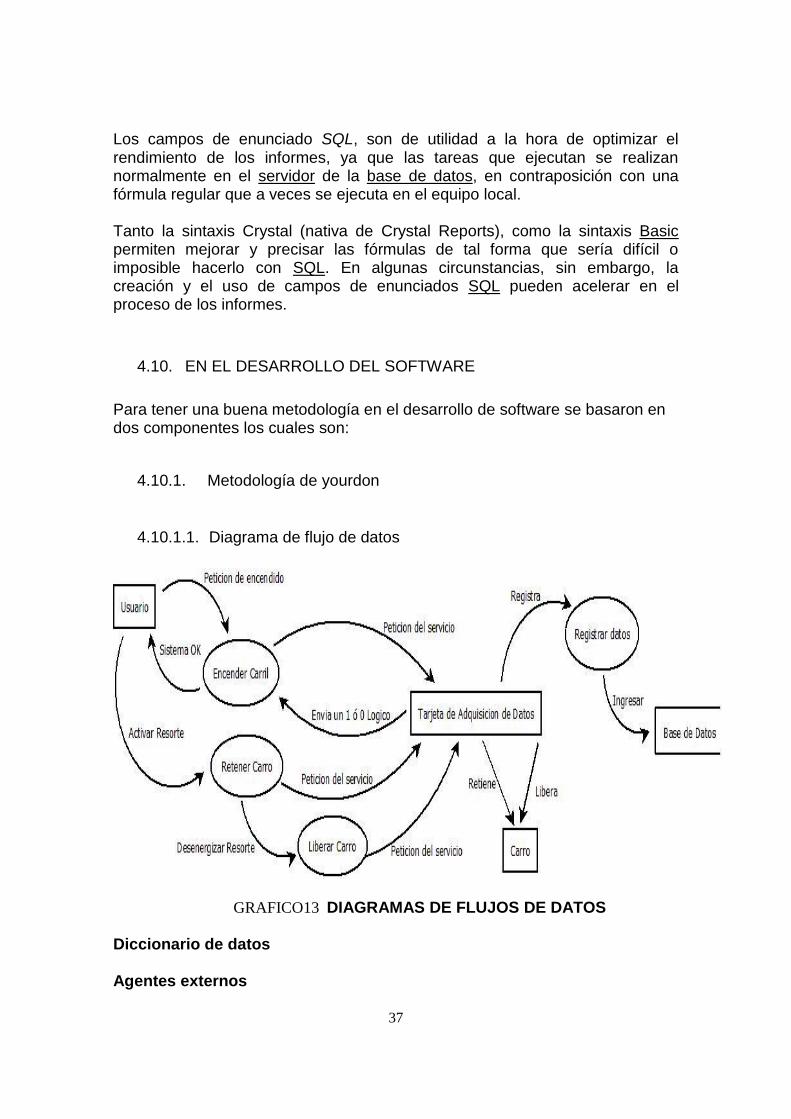
4.10.1.1. Diagrama de flujo de datos
GRAFICO13 DIAGRAMAS DE FLUJOS DE DATOS
Diccionario de datos Agentes externos
38
Usuario: es el encargado de manipular todas propiedades del sistema. Tarjeta de Adquisición de Datos: es el encargado de convertir todas las peticiones del sistema a señales análogas. Carro: es el dispositivo que se encarga de entregar los datos al sistema. Almacenes de datos Base de Datos: es el encargado de guardar toda la información que entrega el sistema. Procesos Encender Carril: permite encender la práctica. Retener Carro: energiza bobina para que retenga el carro del carril. Liberar Carro: desenergiza el bobina para que el carro puede recorrer el carril. Registrar Datos: guarda toda la información en la base de datos.
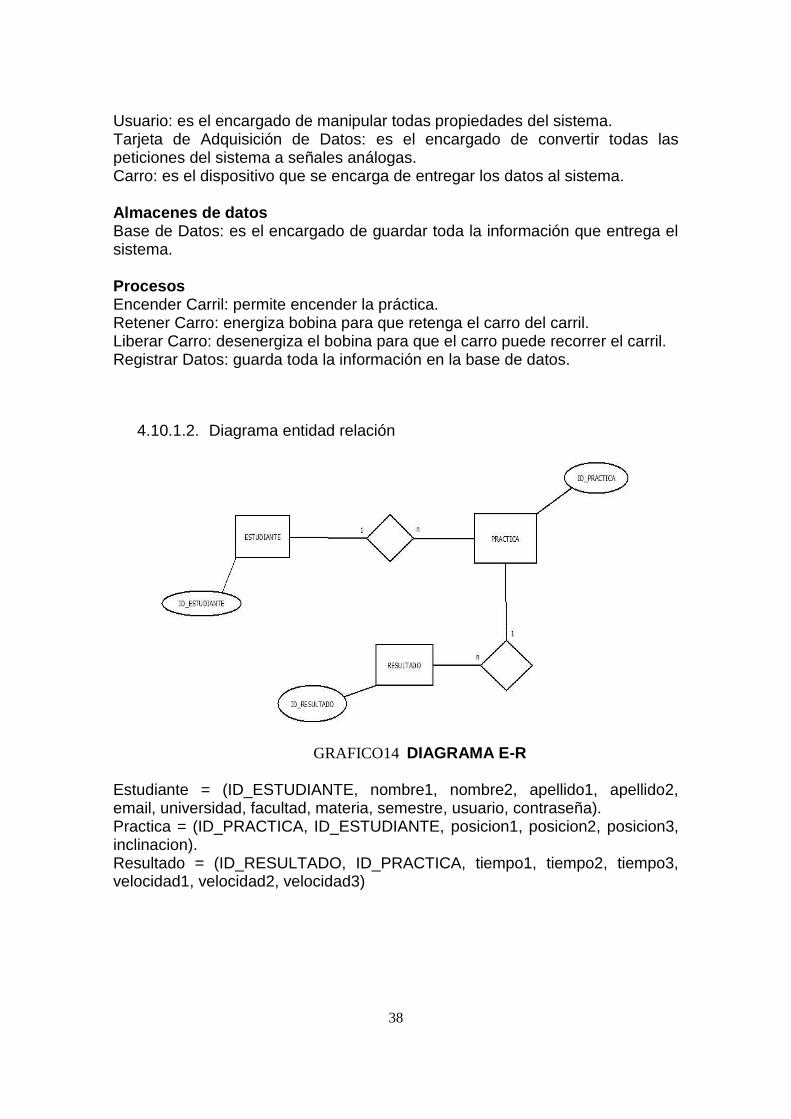
4.10.1.2. Diagrama entidad relación
GRAFICO14 DIAGRAMA E-R Estudiante = (ID_ESTUDIANTE, nombre1, nombre2, apellido1, apellido2, email, universidad, facultad, materia, semestre, usuario, contraseña). Practica = (ID_PRACTICA, ID_ESTUDIANTE, posicion1, posicion2, posicion3, inclinacion). Resultado = (ID_RESULTADO, ID_PRACTICA, tiempo1, tiempo2, tiempo3, velocidad1, velocidad2, velocidad3)
39
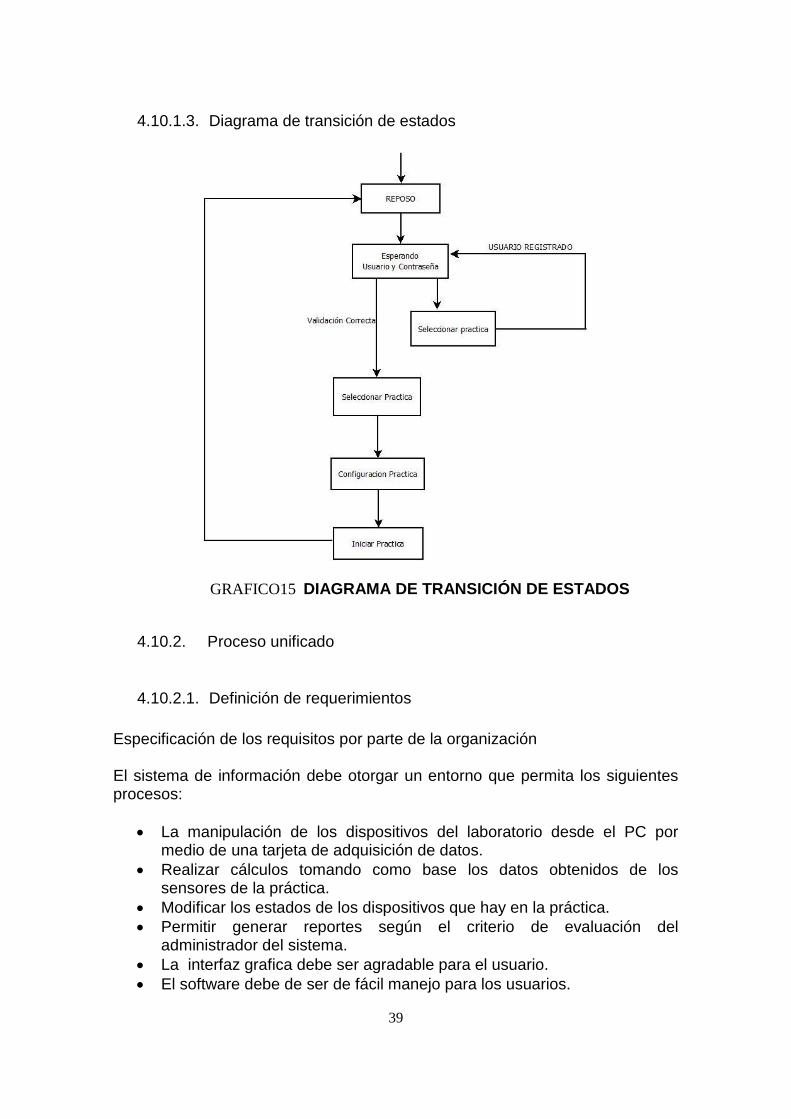
4.10.1.3. Diagrama de transición de estados
GRAFICO15 DIAGRAMA DE TRANSICIÓN DE ESTADOS
4.10.2. Proceso unificado
4.10.2.1. Definición de requerimientos
Especificación de los requisitos por parte de la organización El sistema de información debe otorgar un entorno que permita los siguientes procesos:
La manipulación de los dispositivos del laboratorio desde el PC por medio de una tarjeta de adquisición de datos.
Realizar cálculos tomando como base los datos obtenidos de los sensores de la práctica.
Modificar los estados de los dispositivos que hay en la práctica.
Permitir generar reportes según el criterio de evaluación del administrador del sistema.
La interfaz grafica debe ser agradable para el usuario.
El software debe de ser de fácil manejo para los usuarios.
40
Especificación de los requisitos por parte del ingeniero
Un sistema de información que permita la conexión a un gestor base de datos y en él se guarde la información para su posterior consulta.
Un sistema de información centralizado.
Que el sistema de información permita realizar no solo consultas, teniendo en cuenta un parámetro sino que también pueda modificar la información de cada estudiante.
Un controlador que permita la comunicación entre el sistema y la tarjeta de adquisición de datos.
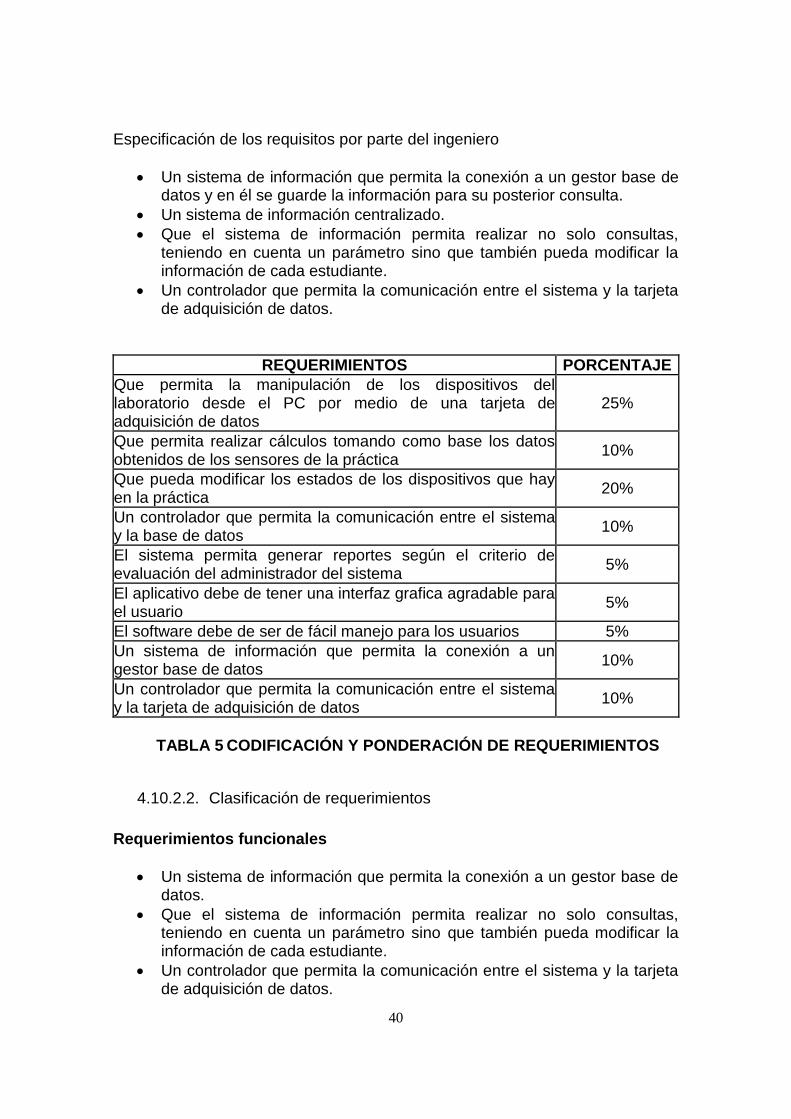
REQUERIMIENTOS PORCENTAJE
Que permita la manipulación de los dispositivos del laboratorio desde el PC por medio de una tarjeta de adquisición de datos
25%
Que permita realizar cálculos tomando como base los datos obtenidos de los sensores de la práctica
10%
Que pueda modificar los estados de los dispositivos que hay en la práctica
20%
Un controlador que permita la comunicación entre el sistema y la base de datos
10%
El sistema permita generar reportes según el criterio de evaluación del administrador del sistema
5%
El aplicativo debe de tener una interfaz grafica agradable para el usuario
5%
El software debe de ser de fácil manejo para los usuarios 5%
Un sistema de información que permita la conexión a un gestor base de datos
10%
Un controlador que permita la comunicación entre el sistema y la tarjeta de adquisición de datos
10%
TABLA 5 CODIFICACIÓN Y PONDERACIÓN DE REQUERIMIENTOS
4.10.2.2. Clasificación de requerimientos
Requerimientos funcionales
Un sistema de información que permita la conexión a un gestor base de datos.
Que el sistema de información permita realizar no solo consultas, teniendo en cuenta un parámetro sino que también pueda modificar la información de cada estudiante.
Un controlador que permita la comunicación entre el sistema y la tarjeta de adquisición de datos.
41
Que permita la manipulación de los dispositivos del laboratorio desde el PC por medio de una tarjeta de adquisición de datos.
Que permita realizar cálculos tomando como base los datos obtenidos de los sensores de la práctica.
Que pueda modificar los estados de los dispositivos que hay en la práctica.
Requerimientos no funcionales
El sistema permita generar reportes según el criterio de evaluación del administrador del sistema.
Requerimientos del usuario
El aplicativo debe de tener una interfaz grafica agradable para el usuario.
El software debe de ser de fácil manejo para los usuarios. Requerimientos del sistema
Un sistema de información centralizado.
42
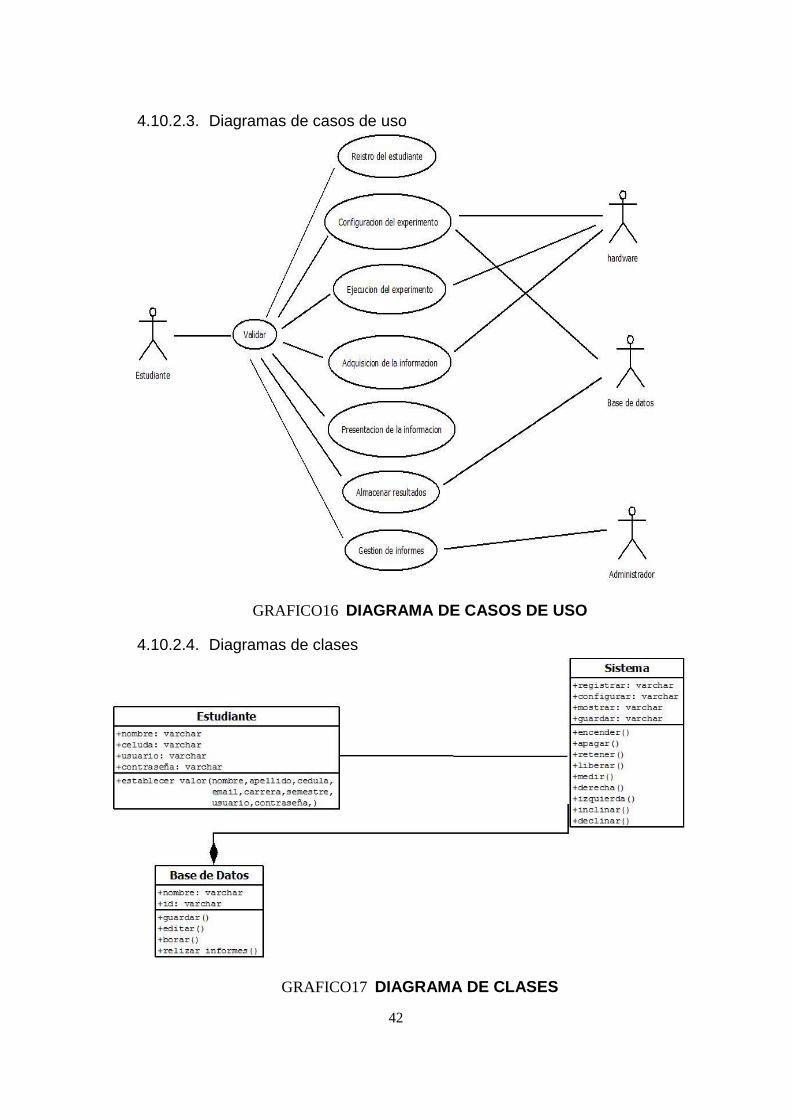
4.10.2.3. Diagramas de casos de uso
GRAFICO16 DIAGRAMA DE CASOS DE USO
4.10.2.4. Diagramas de clases
GRAFICO17 DIAGRAMA DE CLASES
43
5. CONCLUSIONES
Con la realizacion de este proyecto se evidencia la inluencia que tiene la automatización de algunos procesos físicos y como estos pueden mejorar el conocimiento adquerido en clase.
La automatización provee una mejor herramienta para confrontar los datos optenidos teoricamente con los adqueridos por medio de la medicion de las variables.
Los procesos de calibración de las practicas instrumentadas, generan un nivel de confiabilidad el cual permite que tanto el estudiante como el docente puedan confrontar los datos obtenidos y así evidenciar los márgenes de errores que se generan cuando los procesos se realizan de manera manual.
Posteriormente al desarrollo de la investigación de los laboratorios instrumentados, es de resaltar la labor de la tarjeta de adquisición, el cual es la pieza clave de dichas prácticas permitiendo ser el puente entre los dispositivos y el computador. Abriendo las posibilidades de nuevos desarrollos basados en los conocimientos adquiridos de este dispositivo.
Este proyecto servirá como antecedente para nuevos desarrollos de plataformas que permitan automatizar procesos no solo físicos sino también cualquier actividad en el que se requieran la adquisición y manejo de las variables del entorno.
En el proyecto es de vital importancia los reportes generados por el administrador y/o docente de las practicas del laboratorio, ya que basados en estos permitirán determinar si los objetivos trazados con estos laboratorios instrumentados, se cumplen a cabalidad o en su defecto hasta que porcentaje son desarrollados.
44
6. RECOMENDACIONES
Realizar las modificaciones en cuanto al movimiento de los sensores, con el fin de llegar a los más exacto en cuanto a las medidas de las variables requeridas por la práctica.
Realizar periódicamente calibración a los dispositivos de la practica instrumentada.
Continuar el mejoramiento de los reportes para las estadisticas del administrador.
Capacitar a los estudiantes por medio de los manuales de usuario la manera mas adecuada de manipular los instrumentos de la practica virtual por medio del sistema realizado.
Capacitar a los futuros residentes en linea de investigacion que deseen desarrollar nuevas prácticas instrumentadas por medio del manual de instalación con el fin de que estos encuentren la mejor manera de realizar las comunicaciones con la tarjeta de adquisición.
Establecer estrategias que permitan fortalecer los procesos de aprendizaje en el área de la fisica basados en los laboratorios instrumentados.
Continuar realizando una investigación que permita mejorar cada vez más los distintos procesos de la instrumentación de los procesos físicos dentro del laboratorio.
45
7. REFERENCIAS BIBLIOGRAFICAS
ROBERTS Michael J. Señales y sistemas. Mexico: McGraw Hill, 2005 SCHACH Stephen R. Análisis y diseño orientado a objetos con UML y el proceso unificado. Mexico: McGraw Hill, 2005 JACOBSON Ivar, BOOCH Grady, RUMBAUGH James. El proceso unificado de desarrollo de software. España: ADDISON WESLEY, 2001 SERWAY Raymond A., JEWETT John W. Fisica I. Mexico: Thomson Editores, 2004 tercera edición PALACIOS Municio Enrique, DOMÍNGUEZ Fernando Remiro, LÓPEZ Perez Lucas. Microcontrolador PIC16F84. España: RA-MA, 2006 segunda edición Tomado del internet http://www.pasco.com/prodCatalog/ME/ME-9204_accessory-photogate/#specifications http://sine.ni.com/nips/cds/print/p/lang/es/nid/201987 http://www.portalplanetasedna.com.ar/motor_electrico.htm http://msdn.microsoft.com/library/z1zx9t92 http://galia.fc.uaslp.mx/~medellin/Applets/riel/Riel.htm http://es.scribd.com/doc/62584840/45/ETAPAS-DE-LA-ADQUISICION-DE-DATOS http://www.scielo.cl/scielo.php?script=sci_arttext&pid=S0034-98872001000800016 http://webcache.googleusercontent.com/search?q=cache:WBefdIwT8ZwJ:ocw.um.es/ingenierias/sistemas-embebidos/material-de-clase-1/ssee-t04.pdf+que+es+escalonamiento+de+una+se%C3%B1al&cd=2&hl=es&ct=clnk&gl=co
46
ANEXO A MANUAL DE INSTALACIÓN
En este manual se explica el procedimiento paso a paso que tendría que realizar un estudiante para instalar desde ceros la aplicación que permitiría manejar todos los dispositivos de la práctica automatizada, dichos pasos se pueden fraccionar de la siguiente manera:
Instalación de C# en cualquiera de sus versiones, para el desarrollo del proyecto se trabajó con visual estudio 2008, bajo el sistema operativo Windows 7 Ultimate a 32 bits.
El segundo paso es instalar el controlador de la tarjeta de adquisición (NIDAQ923f1) este nos permitirá tener conexión desde el computador hacia la tarjeta.
El siguiente paso es instalar la base de datos, para este paso se opto por utilizar MySql, ya que se busca que la mayoría del software que se maneje dentro de la investigación sea libre, con este fin se instala el programa VERTRIGO por el cual tendremos acceso y manipulación de la base de datos.
Luego se instala el driver (mysql-connector-net-6.4.3) el cual nos permitirá realizar la conexión entre el programa y la base de datos.
Hasta este punto es toda la configuración que se tiene que realizar en el sistema operativo, ahora se realizará la explicación técnica para realizar la adquisición y el envío de cada señal entre la tarjeta y el computador. Los pasos son:
El primer paso es crear un nuevo proyecto.
El siguiente paso es agregar la referencia de la tarjeta de adquisición dentro del formulario de C#, esto se realiza así:
Se abre el formulario principal, en la parte superior derecha se encuentra la carpeta de References.
Se da clic derecho sobre la carpeta References y luego selecciona la opción Add References.
Luego de que salga la nueva ventana se buscan las siguientes referencias:
-NationalInstruments.Common. -NationalInstruments.DAQmx. -NationalInstruments.UI. -NationalInstruments.UI.WindowsForms.
47
Luego se ingresa al código del formulario y en el inicio del código donde se agregan las cabeceras se escriben estas dos:
- using System.Data; - using NationalInstruments.DAQmx;
Después de esto ya se puede realizar la manipulación de la tarjeta de
adquisición desde C#. Después de realizar dicho procedimiento se entra a manipular la información y como último paso agregarla en una base de datos, como se muestran en los pasos posteriores:
Se abre el formulario principal, en la parte superior derecha se encuentra la carpeta de References.
Se da clic derecho sobre la carpeta References y luego selecciona la opción Add References.
Luego de que salga la nueva ventana se busca la referencia MySql.Data.
Luego se ingresa al código del formulario y en el inicio del código donde se agregan las cabeceras se escriben estas dos:
- using MySql.Data; - using MySql.Data.MySqlClient;
Después de esto ya se puede realizar la manipulación de la base de datos desde C#.


















