Sistemas de Medida de 2º Orden

of 5
-
Upload
jose-triano -
Category
Documents
-
view
216 -
download
0
Transcript of Sistemas de Medida de 2º Orden
-
8/16/2019 Sistemas de Medida de 2º Orden
1/5
Ecuación Diferencial del Movimiento
MEDIDAS ELECTRÓNICAS Apuntes de Cátedra Ing. José M. Triano-2005
1
MEDIDAS ELECTRÓNICAS 1
Ecuación diferencial del Movimiento de un Instrumento de B.M. e I.P.
1.5.3 Sistemas de medida de segundo orden.
Un transductor es de segundo orden cuando incluye dos elementos que almacenan
energía y otros dos que la disipan. La relación entre la entrada x(t) y la salida y(t)
viene dada por una ecuación diferencial lineal de segundo orden de la forma
a2 d 2 y + a1 dy +a0 y = x (t) (5.7)
d t 2 dt
La función de transferencia correspondiente es
Y(s) = k n . (5.8) X(s) s
2 + 2 s +
Donde:
k: es la sensibilidad estática,s: es el denominado coeficiente de amortiguamiento yω: es la denominada frecuencia natural del transductor.
Hacen falta , pues, dos parámetros para definir su comportamiento dinámico y uno para su comportamiento estático.
Las expresiones genéricas de los parámetros de un sistema de segundo orden son
k = 1/a0 (5.9)ω
2n = ao / a2 (5.10)
= a1 / 2 (ao a2 )1/2
(5.11)
Puede observarse que estos tres parámetros son interdependientes y que la
modificación de uno de ellos puede afectar a los otros dos. Solo a0, a1 y a2, son in-
dependientes entre si.
La deducción de la expresión de la salida en función de la entrada cuando ésta es una
de las formas simples consideradas anteriormente, puede encontrarse en [2]. Losresultados son los que figuran en el cuadro 1.4. La representación gráfica
correspondiente es la de la figura 1.9.
Obsérvese que ahora el comportamiento es distinto según sea 0 < ε < 1, ε = 1, o ε >1. Para la entrada senoidal se ha omitido el transitorio inicial.
-
8/16/2019 Sistemas de Medida de 2º Orden
2/5
Ecuación Diferencial del Movimiento
MEDIDAS ELECTRÓNICAS Apuntes de Cátedra Ing. José M. Triano-2005
2
Cuadro 1.4 Expresión de la salida de un sistema de Segundo orden para distintas entradas simples.
Ejemplo: En determinado sistema de medida se desea sustituir un transductor cuyarespuesta dinámica es de primer orden por otro de segundo orden. Si este ultimo tiene
una frecuencia natural igual a la del primero y se desea mantener una caída de - 3 dB adicha frecuencia ¿cuál debe ser el valor del coeficiente de amortiguamiento?
Una atenuación de - 3 dB equivale a-3= 20 log a, a = 10 —3/20 = 0,707
El módulo relativo de una respuesta de segundo orden es
1 .
[(1 — ω2 / ωn)2 + (2 ε ω/ωn )
2 1/ 2
A la frecuencia ωn deseamos tener un modulo de 0,707
1 = 1
4ε2 2
-
8/16/2019 Sistemas de Medida de 2º Orden
3/5
Ecuación Diferencial del Movimiento
MEDIDAS ELECTRÓNICAS Apuntes de Cátedra Ing. José M. Triano-2005
3
De aquí se deduce ε = √2/2 = 0,707.
El error dinámico y el retardo de un sistema de segundo orden dependen no solo de
la forma de la señal de entrada, sino también de ω y de ε. Su expresión es mucho máscompleja que en el caso de un sistema de primer orden, y para su análisis se definen
diversos factores relacionados con ωn y ε.
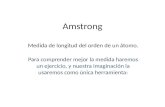
Figura 1.9. Respuesta de un transductor de segundo orden a una entrada en escalón
(a), a una entrada en rampa (b) y a una entrada senoidal (c).
Cuando la entrada es un escalón de amplitud unidad, si el sistema es sobreamortiguado
(ε > 1) a tiene amortiguamiento critico (ε = 1), no hay rebasamiento ni error dinámicoen la respuesta.
Para un sistema subamortiguado, ε < 1, el error dinámico es nulo, pero la velocidad de
respuesta y el rebasamiento (figura 1.9a) están relacionados, de forma que, en general, amayor velocidad mayor rebasamiento. El tiempo de “subida", t r (en ingles, “rise time”),
que es el tiempo empleado para ir del 10 % al 90 % del valor final, viene dado por:
tr = arctan (- ωa / σ ) (5.12)ω a
donde: σ = ε ωn es la denominada atenuación, y ωa = ωn (1 — ε2)1/2 es la frecuencia
natural amortiguada.El tiempo transcurrido hasta que se alcanza el primer pico, t p , es
t p =π / ω a (5.13)
y el máximo rebasamiento a sobre impulso
-
8/16/2019 Sistemas de Medida de 2º Orden
4/5
Ecuación Diferencial del Movimiento
MEDIDAS ELECTRÓNICAS Apuntes de Cátedra Ing. José M. Triano-2005
4
Mp = exp (—σ / ω a ) π (5.14)
El tiempo que tarda la salida en establecerse dentro de una banda alrededor del valor
final, t p, (en ingles, (“settling time”) depende de la amplitud de dicha banda. Para 0 < ε < 0,9, si se considera una banda de + 2% t ≈ 4/ σ , siendo mínimo para e = 0,76; si se
considera una banda de ± 5%, t s ≈ 3/ σ , y el mínimo se obtiene para ε = 0,68. En general,la velocidad de respuesta es óptima para ε entre 0,5 y 0,8 [6].
A la vista de la figura 1.9a, se podría pensar que los transductores cuya respuesta a un
escalón presente un rebasamiento notable, por ser muy subamortiguados, deberían ser
descartados. Pero, en la práctica, la entrada nunca será un escalón perfecto, de manera
que el comportamiento real del transductor puede ser perfectamente aceptable. Es el
caso por ejemplo de los transductores piezoeléctricos (apartado 6.2).
Frente a una entrada en rampa, el error dinámico es
ed = 2ε R / ωn (5.15)
mientras que el retardo es 2ε / ωn.
Para describir la respuesta frecuencial de un sistema de segundo orden, cuando 0 < ε < √2/2 se introducen otros dos parámetros: la frecuencia de resonancia, ωn. y la amplitudde dicha resonancia, Mr. La primera viene dada por:
ωr = ωn (1 — 2 ε2 )1/2 (5.16)
mientras que la amplitud de la respuesta frecuencial para ω = ωr , es
M r = 1 . (5.17)2 . ε . ( 1 - ε2 ) 1/2
Un ejemplo simple de transductor cuyo comportamiento dinámico se puede de
describir mediante una función de transferencia de la forma expresada por la ecuación
5.8, es un termómetro que tenga un recubrimiento, por ejemplo, para su protección. En
este caso, a la capacidad calorífica del elemento que responde a la temperatura (sensor)
y a la resistencia a la transmisión del calor desde el medio donde se mide, hay que
añadir la capacidad calorífica y la resistencia térmica del recubrimiento. El sistema es de
tipo sobreamortiguado. -.
Figura 1.10. Sistema masa-resorte. Ky B no tienen por qué irnecesariamente asociados a elementos físicos distintos.
Un ejemplo de transductor subamortiguado la ofrecen los sistemas masa-resorte(inerciales), empleados para la medida de desplazamientos, velocidades y aceleraciones
-
8/16/2019 Sistemas de Medida de 2º Orden
5/5