Sistemas y Circuitos - UC3M 1/slides/Tema1.pdf · • Circuitos Eléctricos, −James W. Nilsson,...
36
© Francisco J. González, UC3M 2012 1 Sistemas y Circuitos 1 Sistemas y Circuitos 2 © Francisco J. González, UC3M 2009 Material didáctico Bibliografía básica • Señales y Sistemas − Alan V. Oppenheim , Alan S. Willsky , S. Hamid Nawab , − 2ª edición (1998) Prentice Hall; ISBN: 9789701701164 • Circuitos Eléctricos, − James W. Nilsson , Susan A. Riedel , − 7ª edición (2005) Prentice Hall; ISBN: 978-84-205-4458-8 http://www.tsc.uc3m.es/docencia/SyC Aula global
Transcript of Sistemas y Circuitos - UC3M 1/slides/Tema1.pdf · • Circuitos Eléctricos, −James W. Nilsson,...
Tema 1. Señales
Sistemas y Circuitos 1
© Francisco J. González, UC3M 2012 1
Sistemas y Circuitos
1Sistemas y Circuitos
2© Francisco J. González, UC3M 2009
Material didáctico
Bibliografía básica• Señales y Sistemas
− Alan V. Oppenheim, Alan S. Willsky, S.Hamid Nawab,
− 2ª edición (1998) Prentice Hall; ISBN: 9789701701164
• Circuitos Eléctricos, − James W. Nilsson, Susan A. Riedel, − 7ª edición (2005) Prentice Hall; ISBN:
978-84-205-4458-8
http://www.tsc.uc3m.es/docencia/SyCAula global
Tema 1. Señales
Sistemas y Circuitos 2
3© Francisco J. González, UC3M 2009
1.1 Señales...
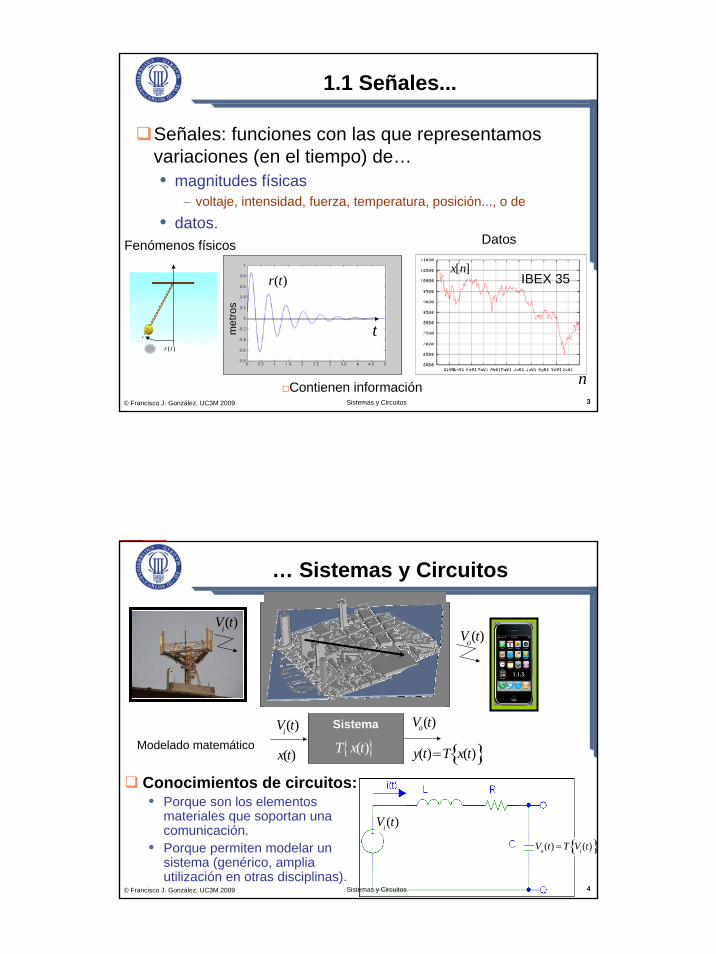
Señales: funciones con las que representamos variaciones (en el tiempo) de…• magnitudes físicas
− voltaje, intensidad, fuerza, temperatura, posición..., o de
• datos.Fenómenos físicos
r (t )
Datos
Contienen información
IBEX 35x[n]
n
r(t)
tmet
ros
3Sistemas y Circuitos
4© Francisco J. González, UC3M 2009
Sistema
Modelado matemático
Vi(t)
Vo(t) =T Vi(t){ }
y(t)=T x(t){ })(tx { }( )T x t
… Sistemas y Circuitos
Conocimientos de circuitos:• Porque son los elementos
materiales que soportan una comunicación.
• Porque permiten modelar un sistema (genérico, amplia utilización en otras disciplinas).
Vi(t)
Vo(t)
( )oV t
Vi(t)
4Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 3
5© Francisco J. González, UC3M 2009
1.2 Clasificación de señales
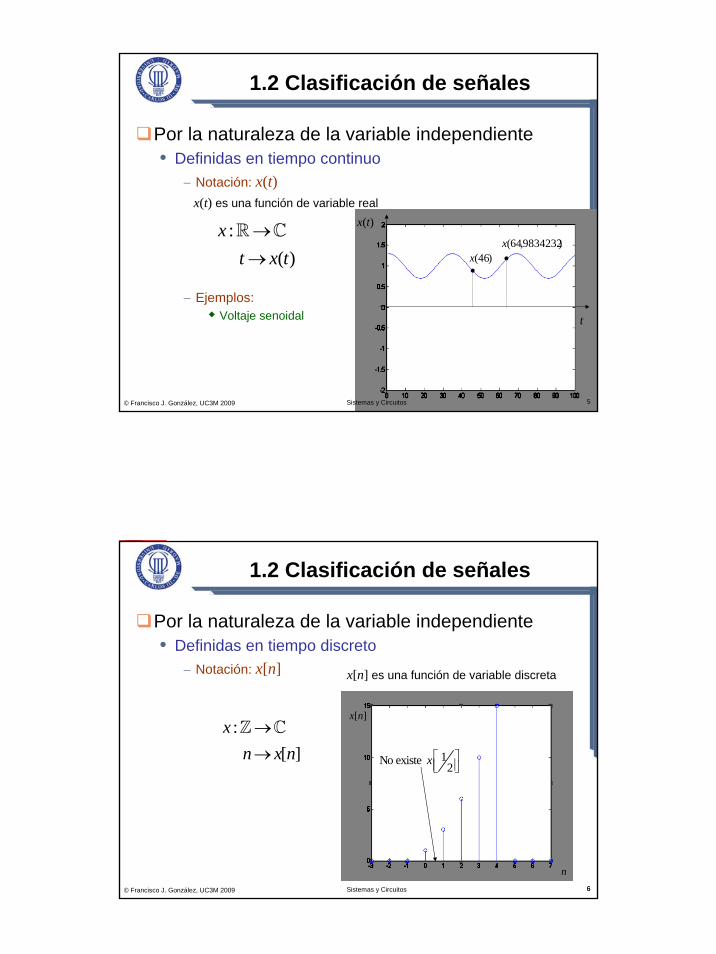
Por la naturaleza de la variable independiente• Definidas en tiempo continuo
− Notación: x(t)
− Ejemplos: Voltaje senoidal
: ( )x
t x t→→
x(t) es una función de variable realx(t)
t
)46(x)9834232,64(x
5Sistemas y Circuitos
6© Francisco J. González, UC3M 2009
1.2 Clasificación de señales
Por la naturaleza de la variable independiente• Definidas en tiempo discreto
− Notación: x[n]
: [ ]x
n x n→→
x[n] es una función de variable discreta
]0[x
]1[x
]2[x
x[n]
n
No existe x 12
⎡⎣⎢
⎤⎦⎥
6Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 4
7© Francisco J. González, UC3M 2009
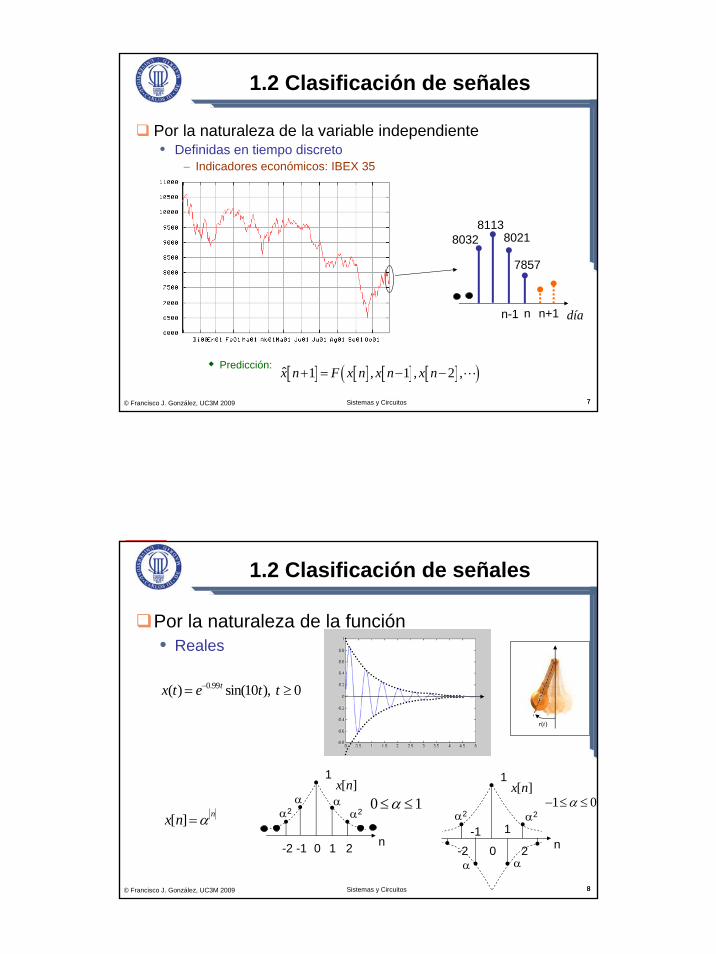
1.2 Clasificación de señales
Por la naturaleza de la variable independiente• Definidas en tiempo discreto
− Indicadores económicos: IBEX 35
Predicción: [ ] [ ] [ ] [ ]( )ˆ 1 , 1 , 2 ,x n F x n x n x n+ = − −
n
80218113
8032
n-1
7857
n+1 día
7Sistemas y Circuitos
8© Francisco J. González, UC3M 2009
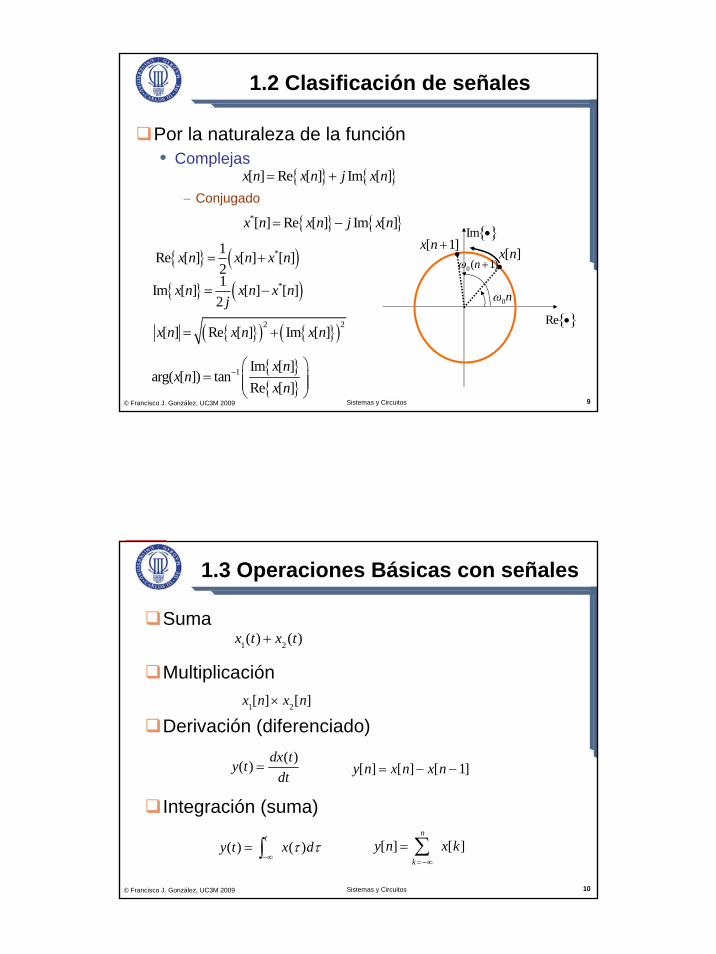
1.2 Clasificación de señales
Por la naturaleza de la función• Reales
x(t) = e−0.99t sin(10t), t ≥ 0
x[n]=α n
0 1 2 n-1-2
1
αα2
αα2
x[n]0 ≤α ≤1
0
1
2 n-1
-2
1
α
α2
α
α2
x[n] −1≤α ≤ 0
r(t)
8Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 5
9© Francisco J. González, UC3M 2009
1.2 Clasificación de señales
Por la naturaleza de la función• Complejas
− Conjugado{ } { }[ ] Re [ ] Im [ ]x n x n j x n= +
{ } ( )*1Re [ ] [ ] [ ]2
x n x n x n= +
{ } ( )*1Im [ ] [ ] [ ]2
x n x n x nj
= −
{ }( ) { }( )2 2[ ] Re [ ] Im [ ]x n x n x n= +
{ }{ }
1 Im [ ]arg( [ ]) tan
Re [ ]x n
x nx n
− ⎛ ⎞= ⎜ ⎟⎜ ⎟
⎝ ⎠
Re •{}
Im •{}x[n]
ω0n
ω0(n+1)x[n+1]
{ } { }*[ ] Re [ ] Im [ ]x n x n j x n= −
9Sistemas y Circuitos
10© Francisco J. González, UC3M 2009
1.3 Operaciones Básicas con señales
Suma
Multiplicación
Derivación (diferenciado)
Integración (suma)
Sistemas y Circuitos 10
x1(t) + x2(t)
x1[n]× x2[n]
y(t) =
dx(t)dt y[n] = x[n]− x[n −1]
y(t) =
−∞
t
∫ x(τ )dτ y[n] =k =−∞
n
∑ x[k]
Tema 1. Señales
Sistemas y Circuitos 6
11© Francisco J. González, UC3M 2009
1.3 Operaciones básicas con señales
Sistemas y Circuitos 11
12© Francisco J. González, UC3M 2009
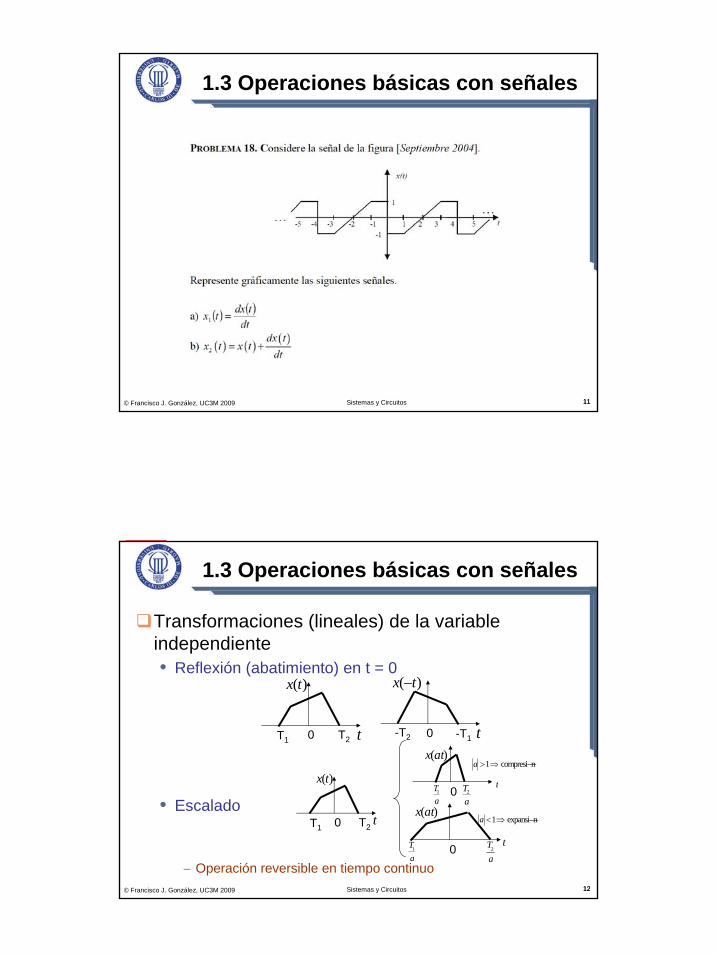
1.3 Operaciones básicas con señales
Transformaciones (lineales) de la variable independiente• Reflexión (abatimiento) en t = 0
• Escalado
− Operación reversible en tiempo continuo
0T1 T2
x(t)
t 0 -T1-T2
x(−t)
t
0T1 T2
)(tx
t
0
)(atx
t
aT2
aT1
a >1⇒ compresi—n
0
)(atx
tT2
aT1
a
a <1⇒ expansi—n
12Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 7
13© Francisco J. González, UC3M 2009
1.3 Operaciones básicas con señales
Transformaciones (lineales) de la variable independiente
− Ejemplo: Reflexión (abatimiento) en t = 0
13Sistemas y Circuitos
14© Francisco J. González, UC3M 2009
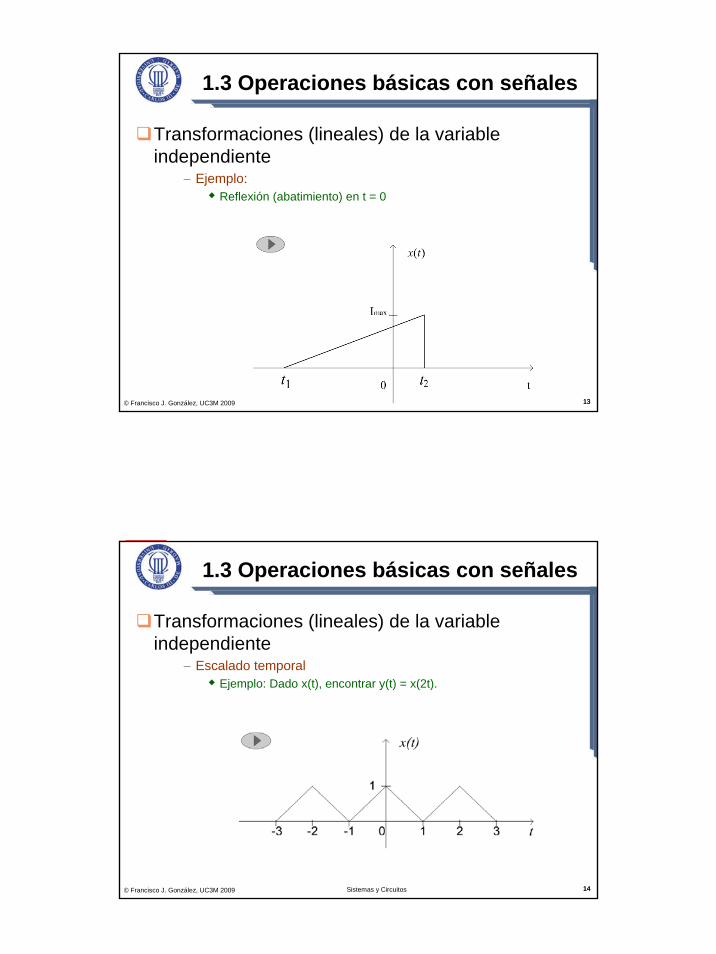
1.3 Operaciones básicas con señales
Transformaciones (lineales) de la variable independiente
− Escalado temporal Ejemplo: Dado x(t), encontrar y(t) = x(2t).
14Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 8
15© Francisco J. González, UC3M 2009
1.3 Operaciones básicas con señales
Transformaciones (lineales) de la variable independiente
− Escalado temporal Ejemplo: Dado x(t), encuentra z(t) = x(t/2).
15Sistemas y Circuitos
16© Francisco J. González, UC3M 2009
1.3 Operaciones básicas con señales
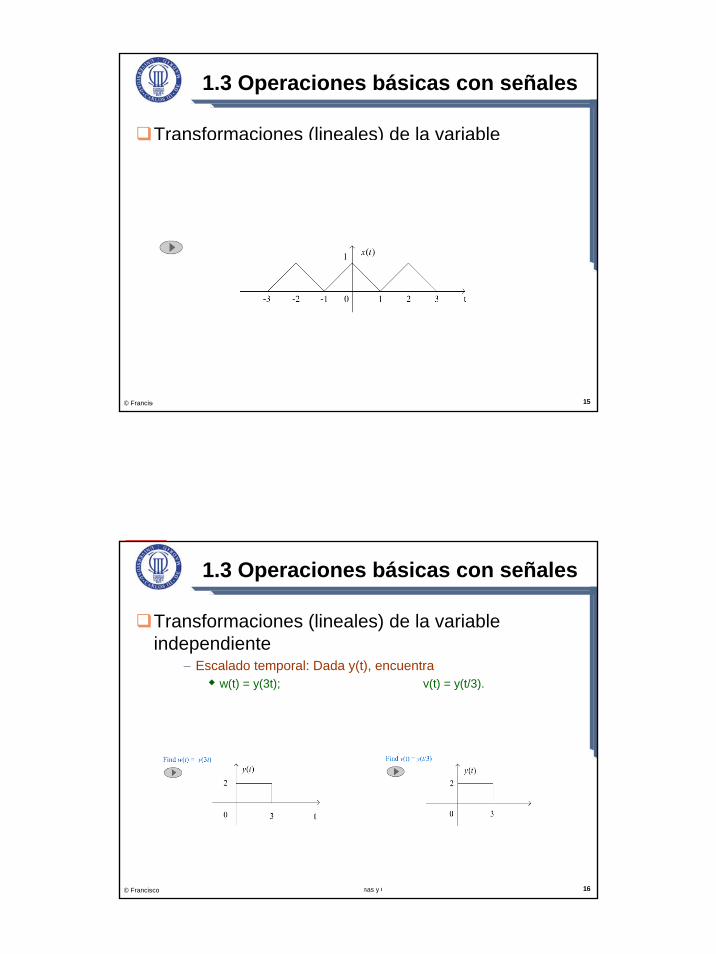
Transformaciones (lineales) de la variable independiente
− Escalado temporal: Dada y(t), encuentra w(t) = y(3t); v(t) = y(t/3).
16Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 9
17© Francisco J. González, UC3M 2009
1.3 Operaciones básicas con señales
Transformaciones (lineales) de la variable independiente• Escalado (tiempo discreto)
− Importante: ¡Operación no reversible!
0
[ ]x n
n
0
[ ] [2 ]y n x n=
n
1 compresióna > ⇒
1 expansióna < ⇒
2
[2] [4]y x=
0
, múltiplo de k[ ]
0, en otro caso
nx ny n k
⎧ ⎡ ⎤⎪ ⎢ ⎥= ⎣ ⎦⎨⎪⎩
n
2
2
[2] [1]y x=
1
1-1
17Sistemas y Circuitos
18© Francisco J. González, UC3M 2009
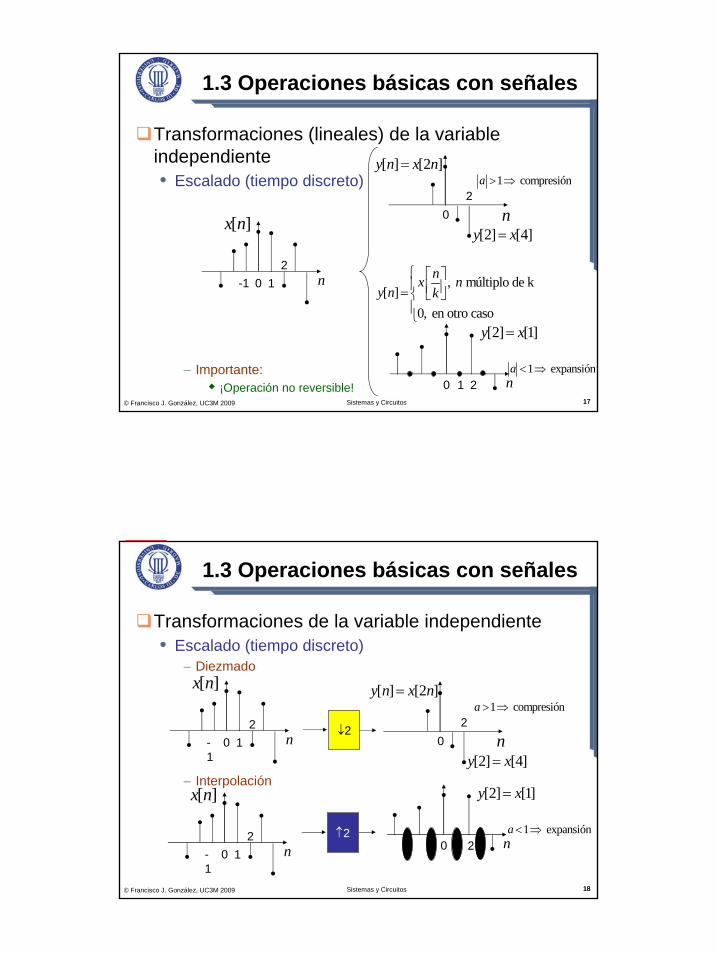
1.3 Operaciones básicas con señales
Transformaciones de la variable independiente• Escalado (tiempo discreto)
− Diezmado
− Interpolación
0
y[n]= x[2n]
n
1 compresióna > ⇒2
y[2]= x[4]
1 expansióna < ⇒0 n2
y[2]= x[1]
1
0
[ ]x n
n2
1-1
0
[ ]x n
n2
1-1
↓2
↑2
18Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 10
19© Francisco J. González, UC3M 2009
α3
1.3 Operaciones básicas con señales
Transformaciones (lineales) de la variable independiente• Desplazamiento
0T1 T2
x(t)
t 0
x(t − t0)
tt0 +T2t0t0 +T1
t0 > 0
0 1 2 n-1-2
1
αα2
αα2
][nx
0 1 2 n-1-2
1
αα2
αα2
x[n+3]
-3-4-5
t0 < 0
19Sistemas y Circuitos
20© Francisco J. González, UC3M 2009
1.3 Operaciones básicas con señales
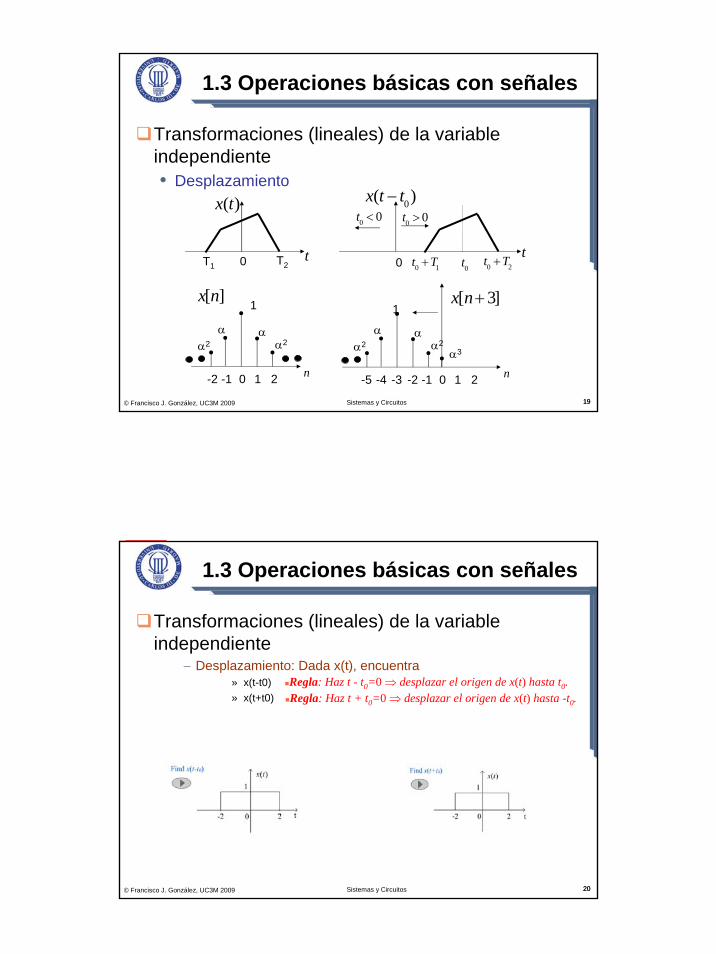
Transformaciones (lineales) de la variable independiente
− Desplazamiento: Dada x(t), encuentra » x(t-t0) » x(t+t0)
Regla: Haz t - t0=0 ⇒ desplazar el origen de x(t) hasta t0.Regla: Haz t + t0=0 ⇒ desplazar el origen de x(t) hasta -t0.
20Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 11
21© Francisco J. González, UC3M 2009
1.3 Operaciones básicas con señales
Combinaciones de escalado y desplazamiento:• Ejemplo: Encuentra x(2t+1) donde x(t) es:
− Método I: x(at+b) Desplazamiento: v(t)=x(t+b) Escalado: y(t) =v(at)= x(at+b).
21Sistemas y Circuitos
22© Francisco J. González, UC3M 2009
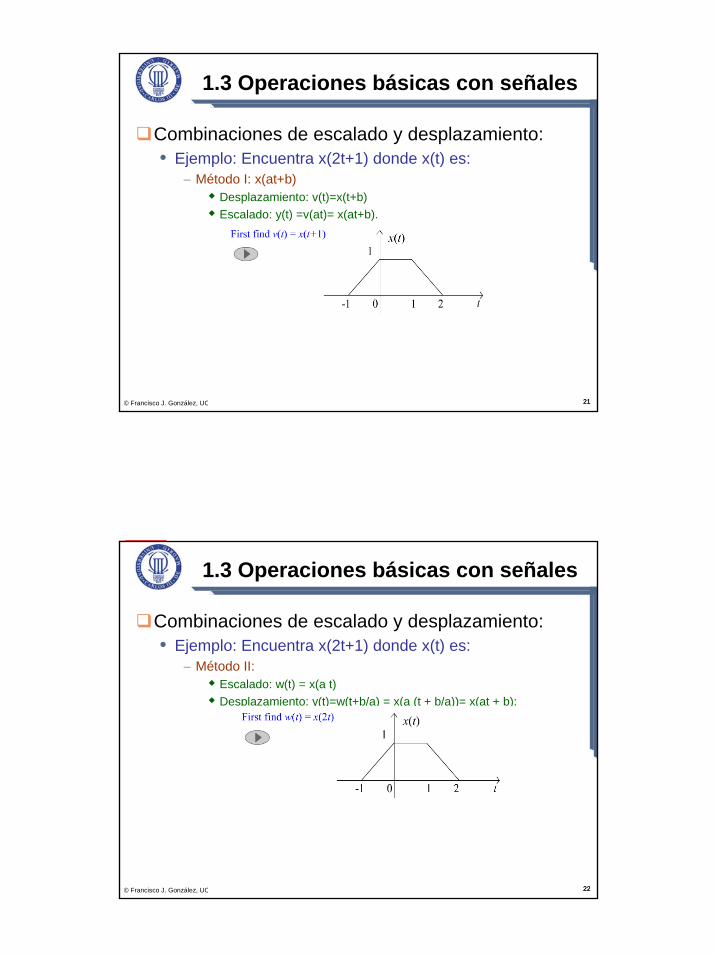
1.3 Operaciones básicas con señales
Combinaciones de escalado y desplazamiento:• Ejemplo: Encuentra x(2t+1) donde x(t) es:
− Método II:Escalado: w(t) = x(a t) Desplazamiento: y(t)=w(t+b/a) = x(a (t + b/a))= x(at + b):
22Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 12
23© Francisco J. González, UC3M 2009
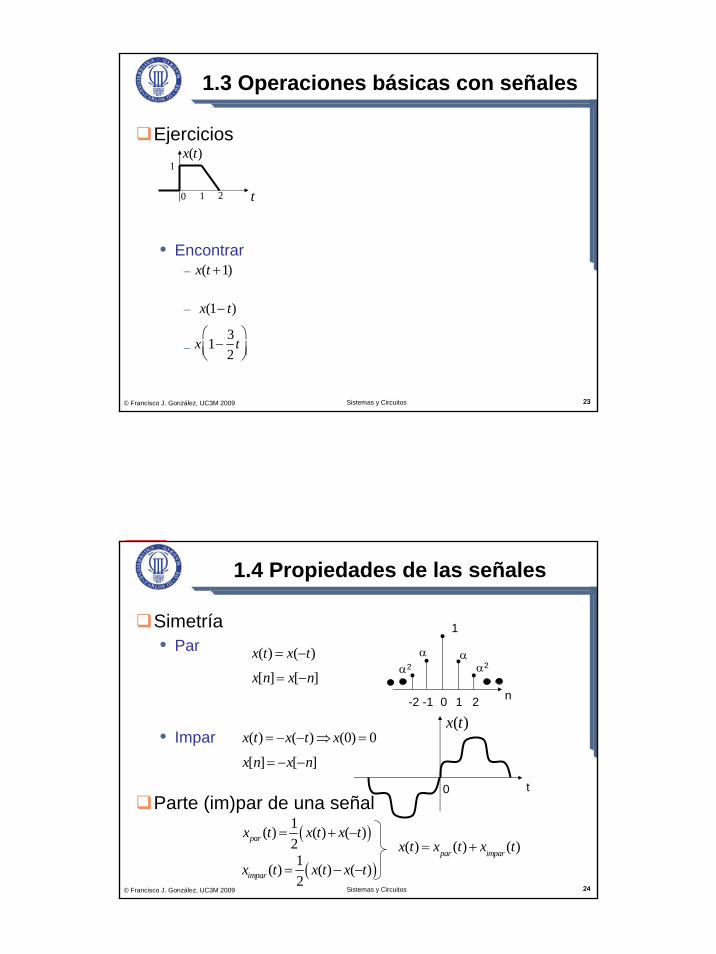
1.3 Operaciones básicas con señales
Ejercicios
• Encontrar−
−
−
0 1 2 t
)(tx
x(t +1)
x(1− t)
x 1−
32
t⎛⎝⎜
⎞⎠⎟
1
23Sistemas y Circuitos
24© Francisco J. González, UC3M 2009
1.4 Propiedades de las señales
Simetría• Par
• Impar
Parte (im)par de una señal
x(t) = x(−t)
0 1 2 n-1-2
1
αα2
x[n]= x[−n]
x(t) = −x(−t)⇒ x(0) = 0
x[n]= −x[−n]
( )1( ) ( ) ( )2parx t x t x t= + −
( )1( ) ( ) ( )2imparx t x t x t= − −
x(t) = xpar (t)+ ximpar (t)
0 t
)(tx
αα2
24Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 13
25© Francisco J. González, UC3M 2009
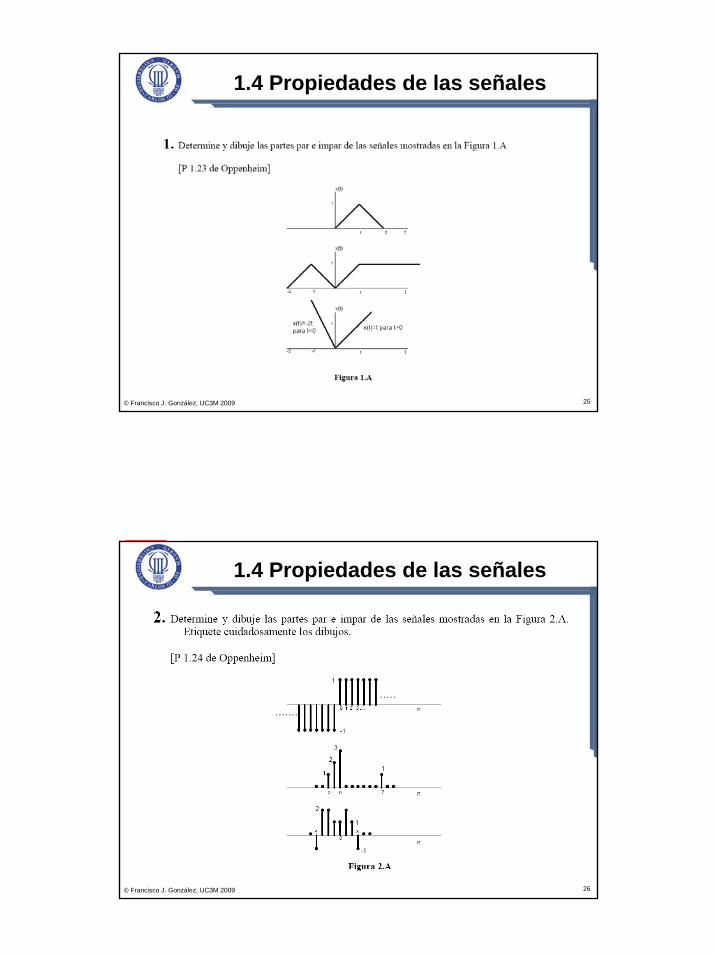
1.4 Propiedades de las señales
26© Francisco J. González, UC3M 2009
1.4 Propiedades de las señales
Tema 1. Señales
Sistemas y Circuitos 14
27© Francisco J. González, UC3M 2009
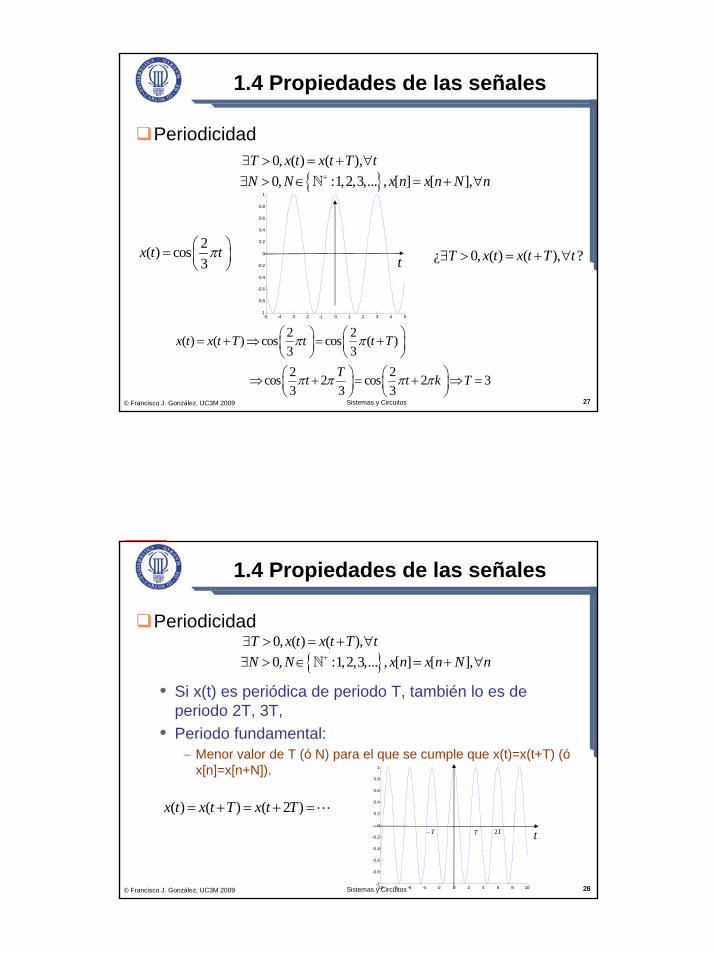
Periodicidad
-5 -4 -3 -2 -1 0 1 2 3 4 5-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.4 Propiedades de las señales
tTtxtxT ∀+=>∃ ),()(,0{ }0, :1,2,3,... , [ ] [ ],N N x n x n N n+∃ > ∈ = + ∀
2( ) cos3
x t tπ⎛ ⎞= ⎜ ⎟⎝ ⎠
2 2( ) ( ) cos cos ( )3 32 2 cos 2 cos 2 33 3 3
x t x t T t t T
Tt t k T
π π
π π π π
⎛ ⎞ ⎛ ⎞= + ⇒ = +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎛ ⎞ ⎛ ⎞⇒ + = + ⇒ =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
¿ 0, ( ) ( ), ?T x t x t T t∃ > = + ∀t
27Sistemas y Circuitos
28© Francisco J. González, UC3M 2009
1.4 Propiedades de las señales
Periodicidad
• Si x(t) es periódica de periodo T, también lo es de periodo 2T, 3T,
• Periodo fundamental: − Menor valor de T (ó N) para el que se cumple que x(t)=x(t+T) (ó
x[n]=x[n+N]).
0, ( ) ( ),T x t x t T t∃ > = + ∀
{ }0, :1,2,3,... , [ ] [ ],N N x n x n N n+∃ > ∈ = + ∀
-10 -8 -6 -4 -2 0 2 4 6 8 10-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
tT 2T−T
( ) ( ) ( 2 )x t x t T x t T= + = + =
28Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 15
29© Francisco J. González, UC3M 2009
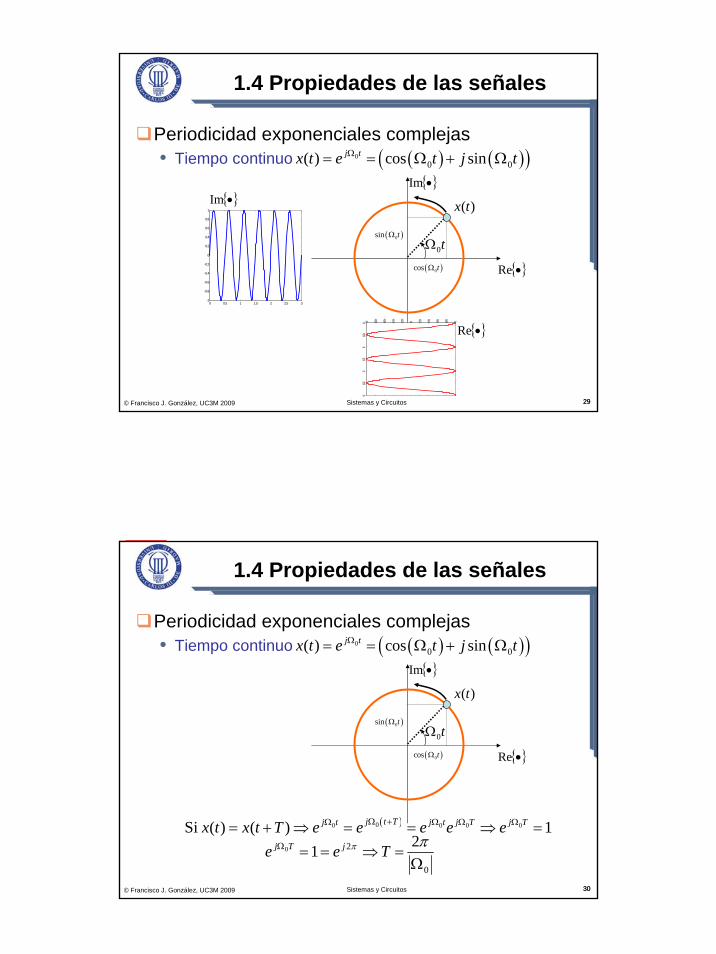
1.4 Propiedades de las señales
Periodicidad exponenciales complejas• Tiempo continuo
{ }•Re
{ }•Im
)(tx
t0Ω
( ) ( )( )00 0( ) cos sinj tx t e t j tΩ= = Ω + Ω
29Sistemas y Circuitos
( )0cos tΩ
( )0sin tΩ
0 0.5 1 1.5 2 2.5 3-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
00.5
11.5
22.5
3-1
-0.8
-0.6
-0.4
-0.2 0 0.2 0.4 0.6 0.8 1
{ }•Re
{ }•Im
30© Francisco J. González, UC3M 2009
1.4 Propiedades de las señales
Periodicidad exponenciales complejas• Tiempo continuo
{ }•Re
{ }•Im
)(tx
t0Ω
( ) ( )( )00 0( ) cos sinj tx t e t j tΩ= = Ω + Ω
( )00 0 0 0Si ( ) ( ) 1j t Tj t j t j T j Tx t x t T e e e e eΩ +Ω Ω Ω Ω= + ⇒ = = ⇒ =
0
2 210
Ω=⇒==Ω ππ Tee jTj
30Sistemas y Circuitos
( )0cos tΩ
( )0sin tΩ
Tema 1. Señales
Sistemas y Circuitos 16
31© Francisco J. González, UC3M 2009
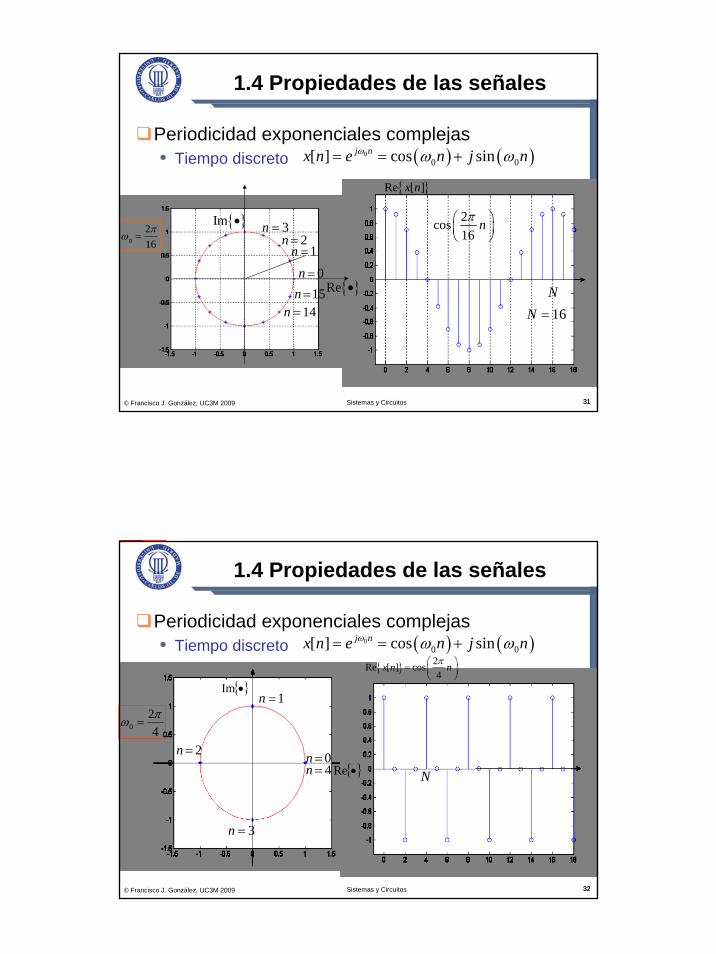
Periodicidad exponenciales complejas• Tiempo discreto
1.4 Propiedades de las señales
( ) ( )00 0[ ] cos sinj nx n e n j nω ω ω= = +
{ }Re •
{ }Im •
ω0 =
2π16
0=n1=n
2=n3=n
15=n14=n
2cos16
nπ⎛ ⎞⎜ ⎟⎝ ⎠
N
N = 16
{ }Re [ ]x n
31Sistemas y Circuitos
32© Francisco J. González, UC3M 2009
Periodicidad exponenciales complejas• Tiempo discreto
1.4 Propiedades de las señales
( ) ( )00 0[ ] cos sinj nx n e n j nω ω ω= = +
32Sistemas y Circuitos
{ }•Re
{ }•Im
42
0πω =
0=n
1=n
2=n
3=n
4=n N
{ } 2Re [ ] cos4
x n nπ⎛ ⎞= ⎜ ⎟⎝ ⎠

Tema 1. Señales
Sistemas y Circuitos 17
33© Francisco J. González, UC3M 2009
1.4 Propiedades de las señales
Periodicidad exponenciales complejas• Tiempo discreto
( )00
0 0 0
0 2
Para que [ ] [ ] 1
j n Nj n
j n j n j N
j N j k
x n x n N e ee e ee e
ωω
ω ω ω
ω π
+= + ⇒ =
⇒ =
⇒ = =
{ }•Re
{ }•Im
][nx
n0ω
0[ ] j nx n e ω=
0
2kN
ωπ
⇒ = ∈
Problema : N ∈
)1(0 +nω
]1[ +nx
Ejemplos
?¿ ,periódica? ¿es 8 Nenjπ
?¿ ,periódica? ¿es 83
Nenj
33Sistemas y Circuitos
34© Francisco J. González, UC3M 2009
1.4 Propiedades de las señales
Sistemas y Circuitos 34
Tema 1. Señales
Sistemas y Circuitos 18
35© Francisco J. González, UC3M 2009
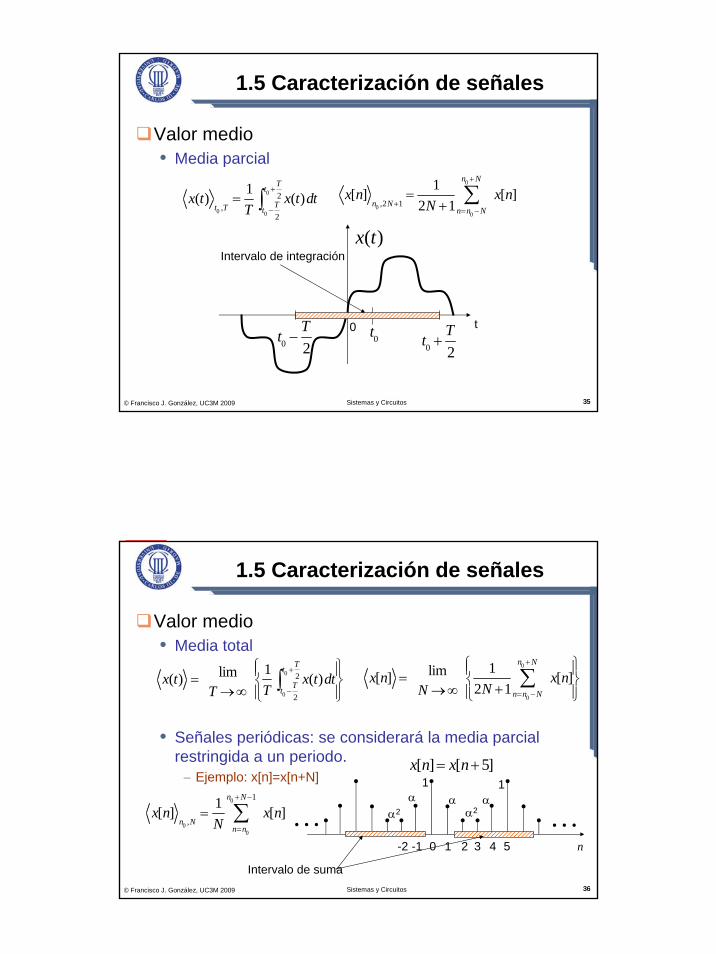
1.5 Caracterización de señales
Valor medio• Media parcial
x(t)
t0 ,T=
1T
x(t)dtt0 −
T2
t0 +T2∫ x[n]
n0 ,2N+1=
12N +1n=n0 −N
n0 +N
∑ x[n]
0 t
x(t)
t0 t0 +T2
t0 −T2
Intervalo de integración
35Sistemas y Circuitos
36© Francisco J. González, UC3M 2009
1.5 Caracterización de señales
Valor medio• Media total
• Señales periódicas: se considerará la media parcial restringida a un periodo.− Ejemplo: x[n]=x[n+N]
x(t) = lim
T →∞1T
x(t)dtt0 −
T2
t0 +T2∫
⎧⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪x[n] = lim
N →∞1
2N +1n=n0 −N
n0 +N
∑ x[n]⎧⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪
x[n]
n0 ,N=
1N n=n0
n0 +N−1
∑ x[n]
0 1 2 n-1-2
1α
α2α
α2
3 4 5
α1
x[n]= x[n+5]
Intervalo de suma36Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 19
37© Francisco J. González, UC3M 2009
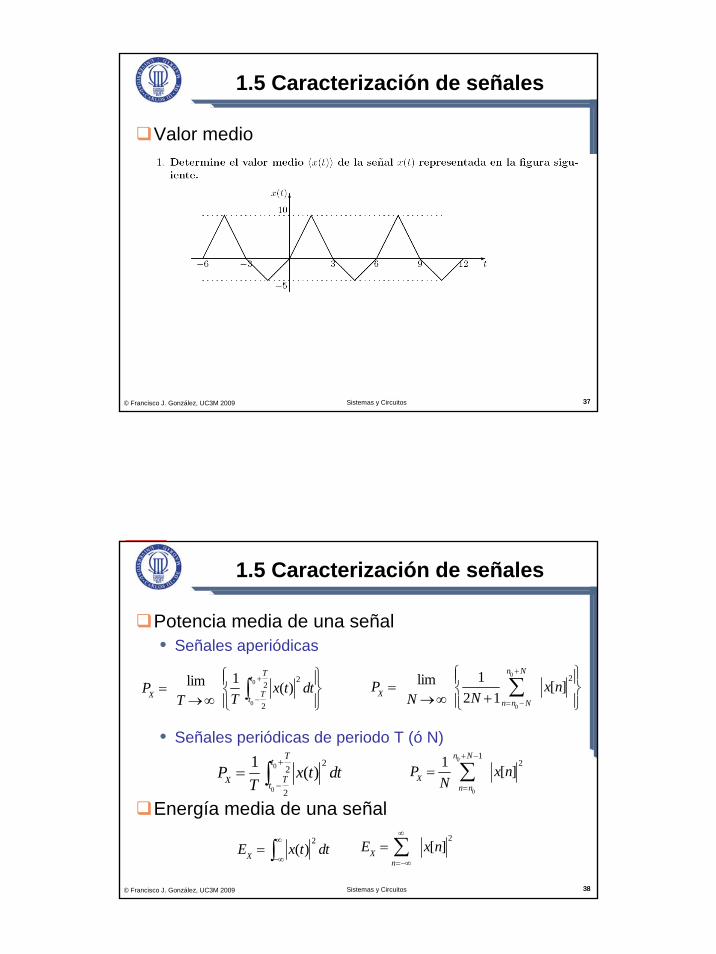
1.5 Caracterización de señales
Valor medio
37Sistemas y Circuitos
38© Francisco J. González, UC3M 2009
1.5 Caracterización de señales
Potencia media de una señal• Señales aperiódicas
• Señales periódicas de periodo T (ó N)
Energía media de una señal
PX =
limT →∞
1T
x(t)2dt
t0 −T2
t0 +T2∫
⎧⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪PX =
limN →∞
12N +1n=n0 −N
n0 +N
∑ x[n]2⎧
⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪
PX =
1T
x(t)2dt
t0 −T2
t0 +T2∫ PX =
1N n=n0
n0 +N−1
∑ x[n]2
EX = x(t)
2dt
−∞
∞
∫ EX =n=−∞
∞
∑ x[n]2
38Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 20
39© Francisco J. González, UC3M 2009
1.5 Caracterización de señales
Señales definidas en energía:• Son aquellas para las que
Señales definidas en potencia• Son aquellas para las que
− Señales periódicas
PX =
limT →∞
1T
x(t)2dt
t0 −T2
t0 +T2∫
⎧⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪<∞
EX = x(t)
2dt
−∞
∞
∫ < ∞ EX =n=−∞
∞
∑ x[n]2<∞
⎛
⎝⎜⎞
⎠⎟
PX =
1T
x(t)2dt
t0 −T2
t0 +T2∫ <∞
39Sistemas y Circuitos
40© Francisco J. González, UC3M 2009
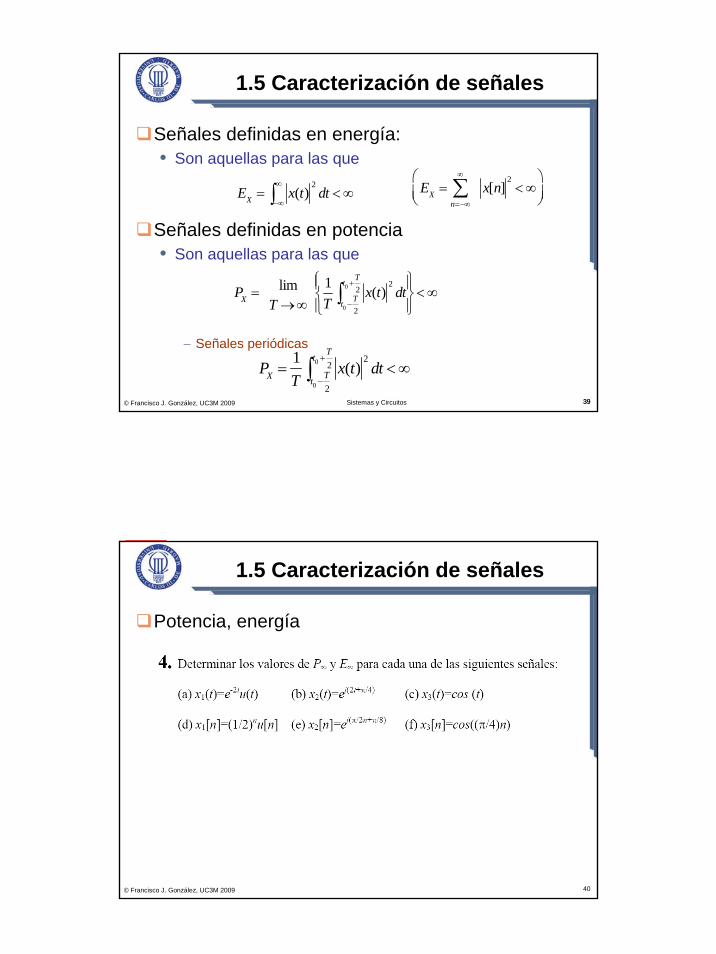
1.5 Caracterización de señales
Potencia, energía
Tema 1. Señales
Sistemas y Circuitos 21
41© Francisco J. González, UC3M 2009
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
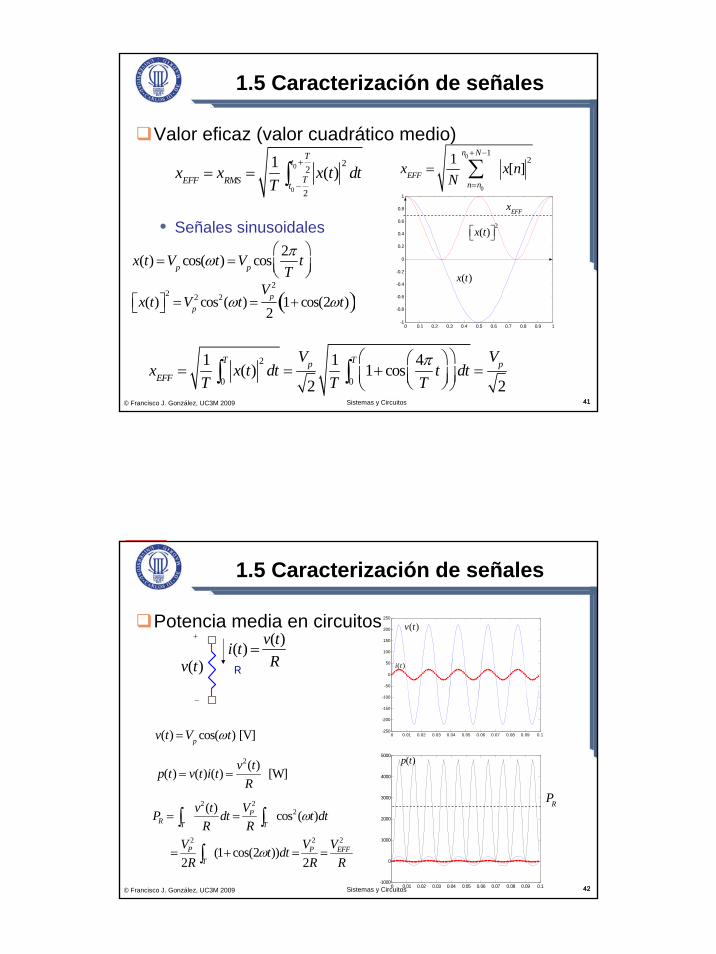
1.5 Caracterización de señales
Valor eficaz (valor cuadrático medio)
• Señales sinusoidales
xEFF = xRMS =
1T
x(t)2dt
t0 −T2
t0 +T2∫ xEFF =
1N n=n0
n0 +N−1
∑ x[n]2
x(t) =Vp cos(ωt) =Vp cos
2πT
t⎛⎝⎜
⎞⎠⎟
x(t)⎡⎣ ⎤⎦
2=Vp
2 cos2(ωt) =Vp
2
21+ cos(2ωt)( )
xEFF =
1T
x(t)2dt
0
T
∫ =Vp
21T
1+ cos4πT
t⎛⎝⎜
⎞⎠⎟
⎛
⎝⎜⎞
⎠⎟dt
0
T
∫ =Vp
2
x(t)
x(t)⎡⎣ ⎤⎦2
xEFF
41Sistemas y Circuitos
42© Francisco J. González, UC3M 2009
Potencia media en circuitos
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-1000
0
1000
2000
3000
4000
5000 p(t)
1.5 Caracterización de señales
R
+
−
v(t)
( )( ) v ti tR
=
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-250
-200
-150
-100
-50
0
50
100
150
200
250
i(t)
v(t)
p(t) = v(t)i(t) =
v2(t)R
[W]
222
2 2 2
( ) cos ( )
(1 cos(2 ))2 2
PR T T
P P EFFT
Vv tP dt t dtR R
V V Vt dtR R R
ω
ω
= =
= + = =
∫ ∫
∫
PR
v(t) =Vp cos(ωt) [V]
42Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 22
43© Francisco J. González, UC3M 2009
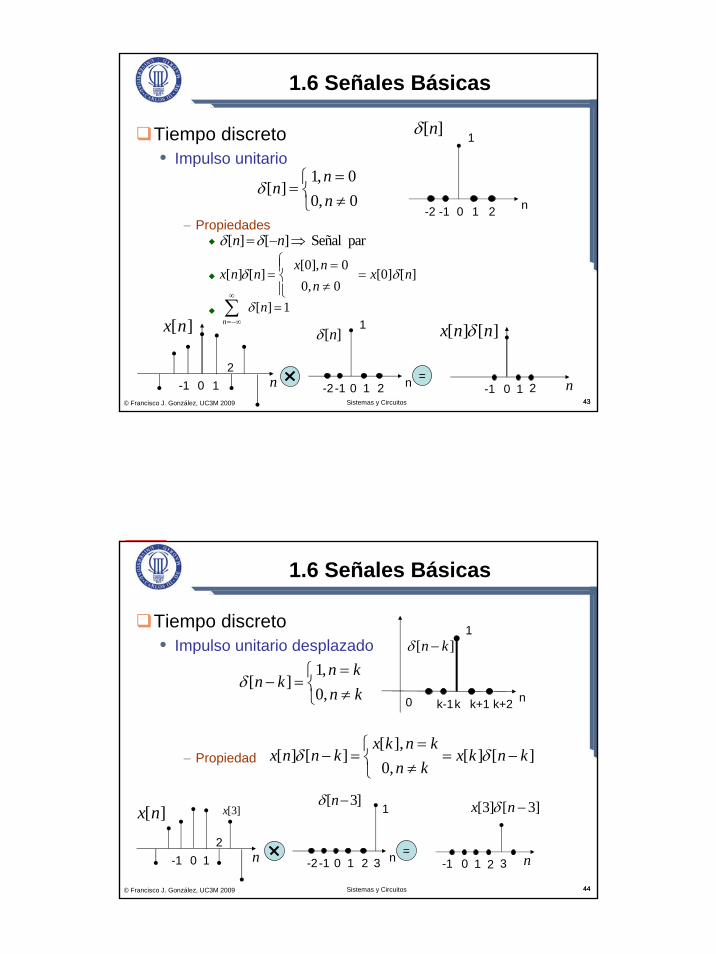
1.6 Señales Básicas
Tiempo discreto• Impulso unitario
− Propiedades
1, 0[ ]
0, 0n
nn
δ=⎧
= ⎨ ≠⎩ 0 1 2 n-1-2
1][nδ
x[n]δ[n] =
x[0],n = 00,n ≠ 0
= x[0]⎧⎨⎪
⎩⎪δ[n]
0
][nx
n2
1-1 0 1 2 n-1-2
1][nδ
0
][][ nnx δ
n21-1=
[ ] [ ] Señal parn nδ δ= − ⇒
[ ] 1n
nδ∞
=−∞
=∑
43Sistemas y Circuitos
44© Francisco J. González, UC3M 2009
1.6 Señales Básicas
Tiempo discreto• Impulso unitario desplazado
− Propiedad
⎩⎨⎧
≠=
=−knkn
kn,0,1
][δk k+1 k+2 nk-1
1][ kn −δ
][][,0],[
][][ knkxkn
knkxknnx −
⎩⎨⎧
=≠=
=− δδ
0
][nx
n2
1-1 0 1 2 n-1-2
1]3[ −nδ
0
]3[]3[ −nx δ
n21-1=
0
]3[x
3 3
44Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 23
45© Francisco J. González, UC3M 2009
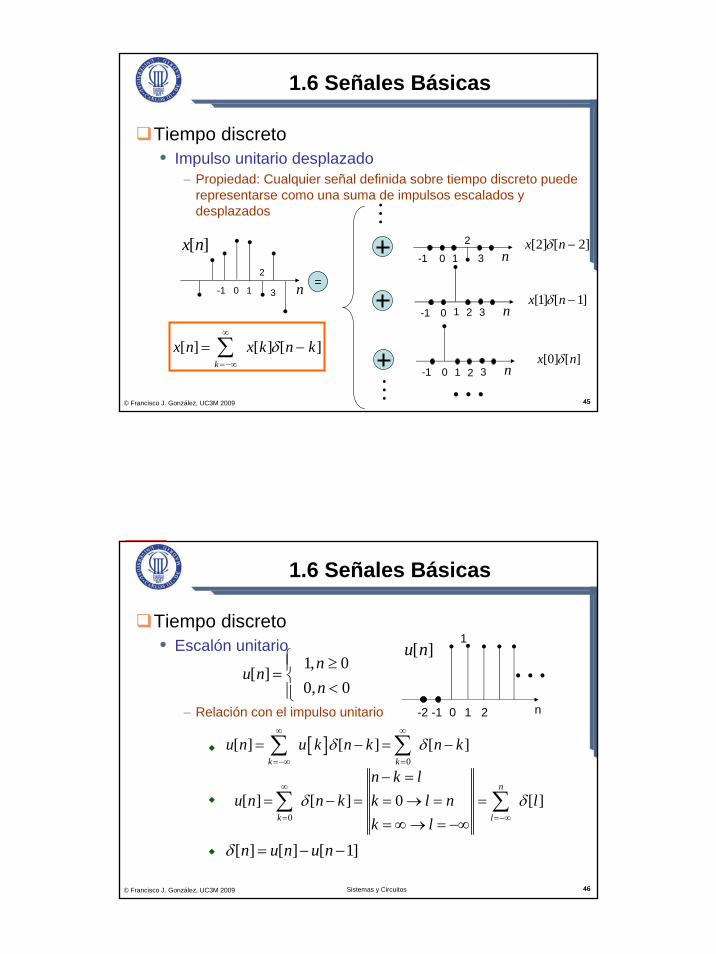
1.6 Señales Básicas
Tiempo discreto• Impulso unitario desplazado
− Propiedad: Cualquier señal definida sobre tiempo discreto puede representarse como una suma de impulsos escalados y desplazados
0 x[2]δ[n − 2]
n2
1-1 3
0 x[1]δ[n −1]n21-1 3
0 x[0]δ[n]n21-1 3
=0
x[n]
n2
1-1 3
x[n] =
k=−∞
∞
∑ x[k]δ[n − k]
45
46© Francisco J. González, UC3M 2009
1.6 Señales Básicas
Tiempo discreto• Escalón unitario
− Relación con el impulso unitario u[n] =
1,n ≥ 00,n < 0
⎧⎨⎪
⎩⎪0 1 2 n-1-2
1u[n]
[ ]0
[ ] [ ] [ ]k k
u n u k n k n kδ δ∞ ∞
=−∞ =
= − = −∑ ∑
0[ ] [ ] 0 [ ]
n
k l
n k lu n n k k l n l
k lδ δ
∞
= =−∞
− == − = = → = =
= ∞→ = −∞∑ ∑
[ ] [ ] [ 1]n u n u nδ = − −
46Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 24
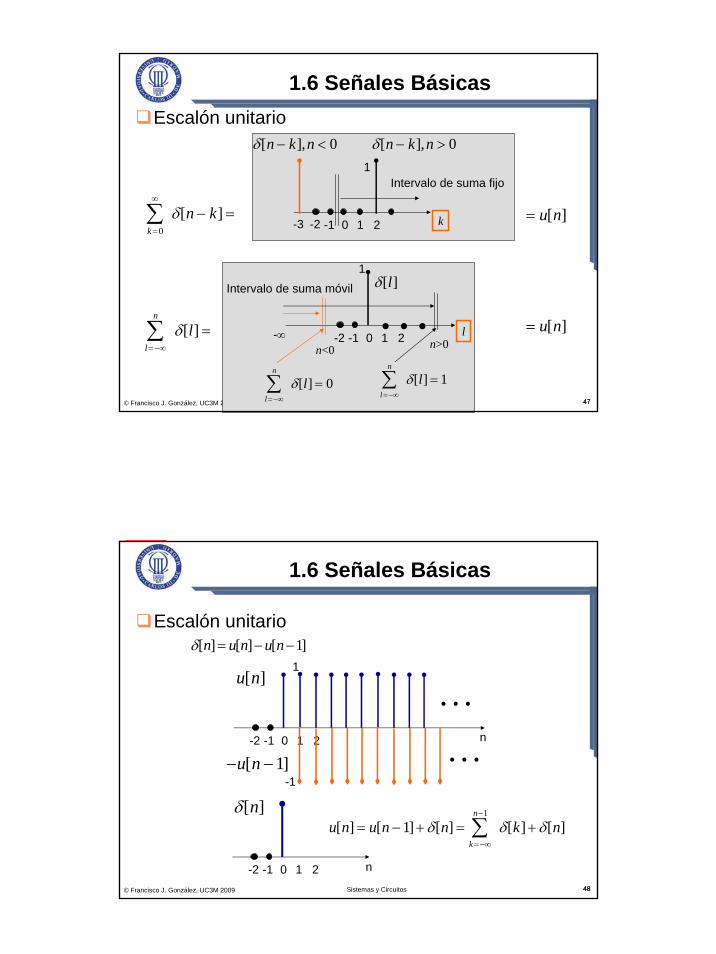
47© Francisco J. González, UC3M 2009
Escalón unitario
l=−∞
n
∑ δ[l] = 0 1 2 l-1-2
1δ[l]
-∞
Intervalo de suma móvil
k=0
∞
∑ δ[n − k] =0 1 2 k-1-2
Intervalo de suma fijo
-3
1.6 Señales Básicas
1
δ[n − k],n > 0 δ[n − k],n < 0
= u[n]
n<0
l=−∞
n
∑ δ[l] = 0
n>0
l=−∞
n
∑ δ[l] = 1
= u[n]
47
48© Francisco J. González, UC3M 2009
1.6 Señales Básicas
Escalón unitario δ[n]= u[n]−u[n−1]
0 1 2 n-1-2
1 u[n]
−u[n −1]-1
0 1 2 n-1-2
δ[n]u[n] = u[n −1]+ δ[n] =
k=−∞
n−1
∑ δ[k]+ δ[n]
48Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 25
49© Francisco J. González, UC3M 2009
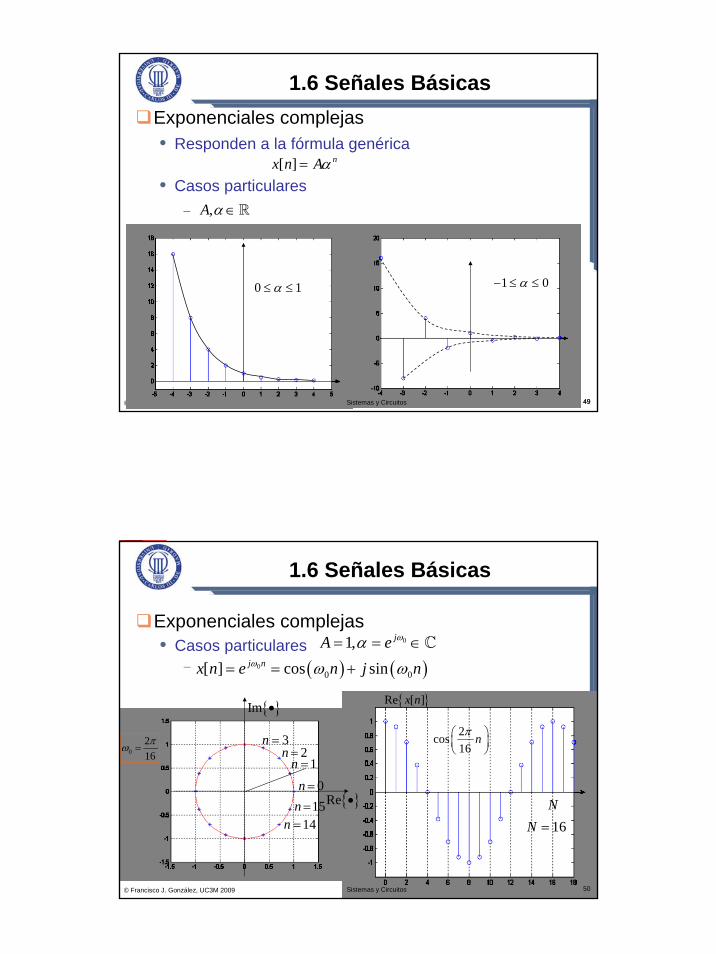
1.6 Señales BásicasExponenciales complejas• Responden a la fórmula genérica
• Casos particulares−
x[n] = Aα n
,A α ∈
0 ≤ α ≤ 1 −1 ≤ α ≤ 0
49Sistemas y Circuitos
50© Francisco J. González, UC3M 2009
1.6 Señales Básicas
Exponenciales complejas• Casos particulares
−
01, jA e ωα= = ∈
( ) ( )00 0[ ] cos sinj nx n e n j nω ω ω= = +
{ }Re •
{ }Im •
0216πω =
0=n1=n
2=n3=n
15=n14=n
2cos16
nπ⎛ ⎞⎜ ⎟⎝ ⎠
N
N = 16
{ }Re [ ]x n
50Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 26
51© Francisco J. González, UC3M 2009
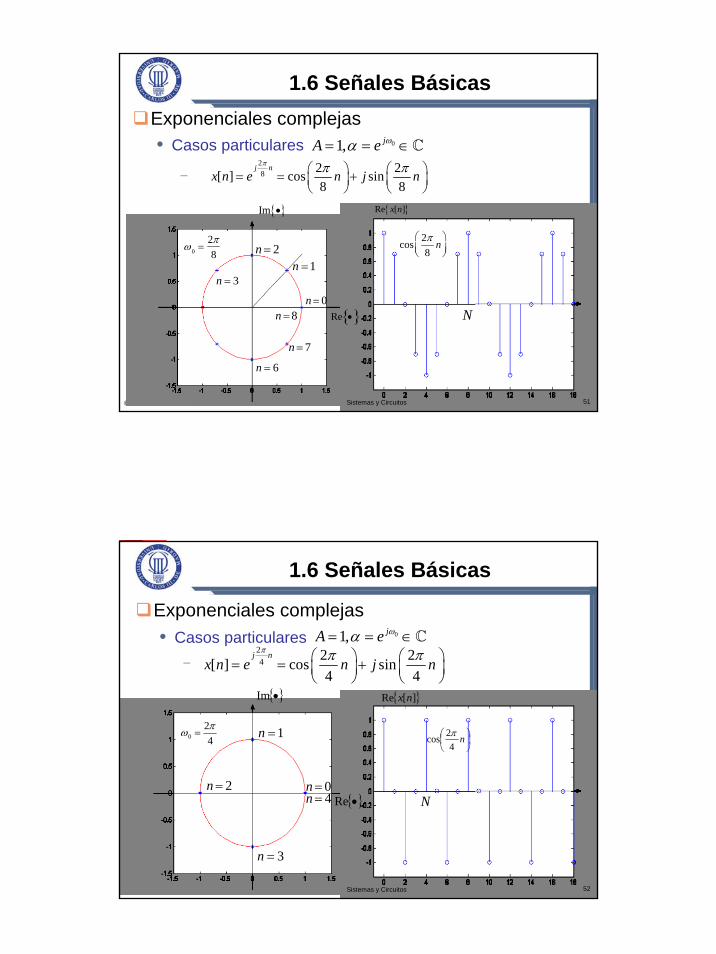
1.6 Señales BásicasExponenciales complejas• Casos particulares
−
01, jA e ωα= = ∈28 2 2[ ] cos sin
8 8j n
x n e n j nπ π π⎛ ⎞ ⎛ ⎞= = +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
Re •{}
{ }Im •
ω0 =
2π8
0=n
1=n2=n
3=n
7=n
6=n
cos2π8
n⎛⎝⎜
⎞⎠⎟
8=n N
{ }Re [ ]x n
51Sistemas y Circuitos
52© Francisco J. González, UC3M 2009
Exponenciales complejas• Casos particulares
−
1.6 Señales Básicas
{ }•Re
{ }•Im
42
0πω =
0=n
1=n
2=n
3=n
⎟⎠⎞
⎜⎝⎛ n
42cos π
4=n N
01, jA e ωα= = ∈24 2 2[ ] cos sin
4 4j n
x n e n j nπ π π⎛ ⎞ ⎛ ⎞= = +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠{ }][Re nx
52Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 27
53© Francisco J. González, UC3M 2009
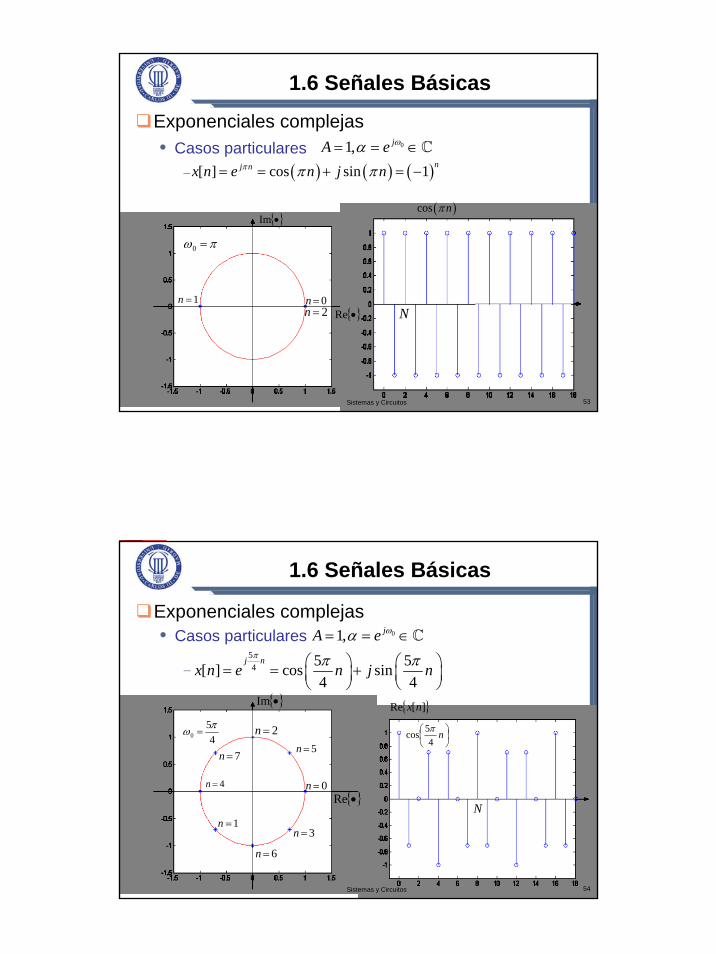
Exponenciales complejas• Casos particulares
−
1.6 Señales Básicas
{ }•Re
{ }•Im
πω =0
0=n1=n
( )cos nπ
2=n N
01, jA e ωα= = ∈
( ) ( ) ( )[ ] cos sin 1 nj nx n e n j nπ π π= = + = −
53Sistemas y Circuitos
54© Francisco J. González, UC3M 2009
Exponenciales complejas• Casos particulares
−
1.6 Señales Básicas
{ }•Re
{ }•Im
45
0πω =
0=n
1=n
⎟⎠⎞
⎜⎝⎛ n
45cos π2=n
3=n
4=n
5=n
6=n
7=n
N
01, jA e ωα= = ∈54 5 5[ ] cos sin
4 4j n
x n e n j nπ π π⎛ ⎞ ⎛ ⎞= = +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠{ }][Re nx
54Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 28
55© Francisco J. González, UC3M 2009
Exponenciales complejas• Casos particulares
−
1.6 Señales Básicas
{ }•Re
{ }•Im
πω 20 =
0=n
( )nπ2cos
πω 40 =
00 =ω
N1=n
01, jA e ωα= = ∈
( ) ( )2[ ] cos 2 sin 2 1j nx n e n j nπ π π= = + =
55Sistemas y Circuitos
56© Francisco J. González, UC3M 2009
1.6 Señales Básicas
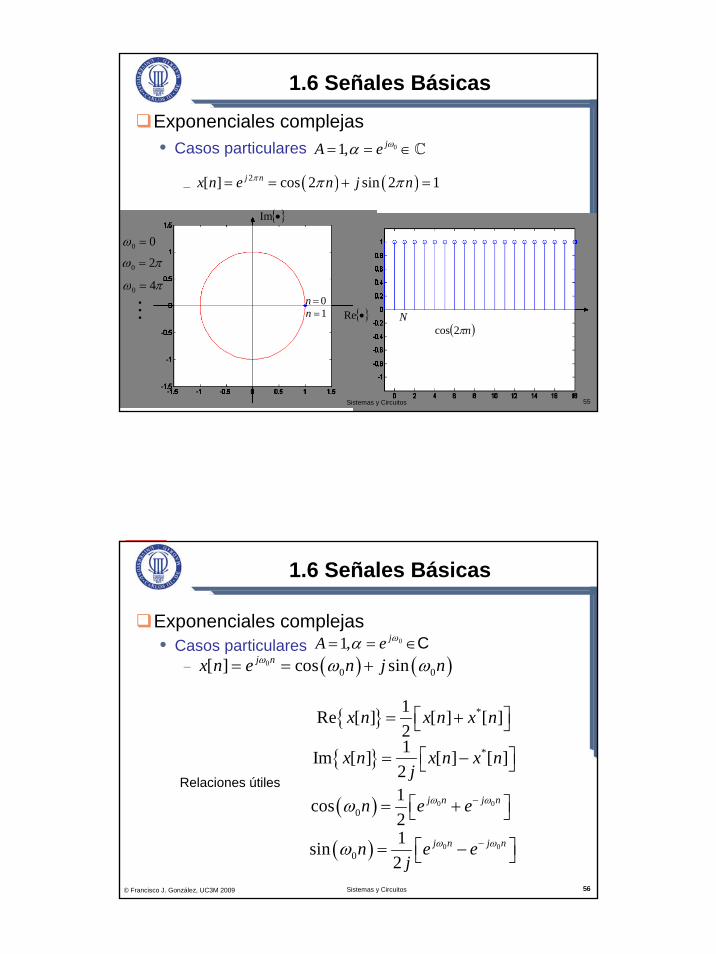
Exponenciales complejas• Casos particulares
−
C∈== 0,1 ωα jeA( ) ( )0
0 0[ ] cos sinj nx n e n j nω ω ω= = +
( ) 0 00
1cos2
j n j nn e eω ωω −⎡ ⎤= +⎣ ⎦
( ) 0 00
1sin2
j n j nn e ej
ω ωω −⎡ ⎤= −⎣ ⎦
{ } *1Re [ ] [ ] [ ]2
x n x n x n⎡ ⎤= +⎣ ⎦
{ } *1Im [ ] [ ] [ ]2
x n x n x nj⎡ ⎤= −⎣ ⎦
Relaciones útiles
56Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 29
57© Francisco J. González, UC3M 2009
1.6 Señales Básicas
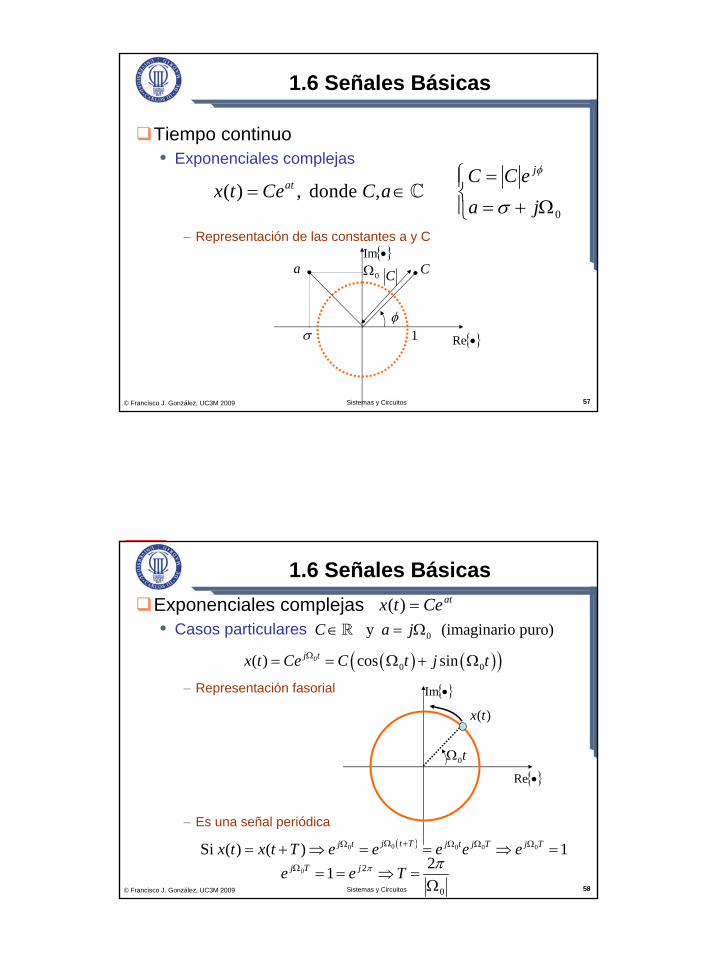
Tiempo continuo• Exponenciales complejas
− Representación de las constantes a y C
( ) , donde atx t Ce C,a= ∈⎪⎩
⎪⎨⎧
Ω+=
=
0jaeCC j
σ
φ
{ }•Re
{ }•ImCa
σ
0Ω
φ
C
1
57Sistemas y Circuitos
58© Francisco J. González, UC3M 2009
1.6 Señales BásicasExponenciales complejas• Casos particulares
− Representación fasorial
− Es una señal periódica
atCetx =)(
{ }•Re
{ }•Im
)(tx
t0Ω
0 y (imaginario puro)C a j∈ = Ω
( ) ( )( )00 0( ) cos sinj tx t Ce C t j tΩ= = Ω + Ω
( )00 0 0 0Si ( ) ( ) 1j t Tj t j t j T j Tx t x t T e e e e eΩ +Ω Ω Ω Ω= + ⇒ = = ⇒ =
0
2 210
Ω=⇒==Ω ππ Tee jTj
58Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 30
59© Francisco J. González, UC3M 2009
1.6 Señales Básicas
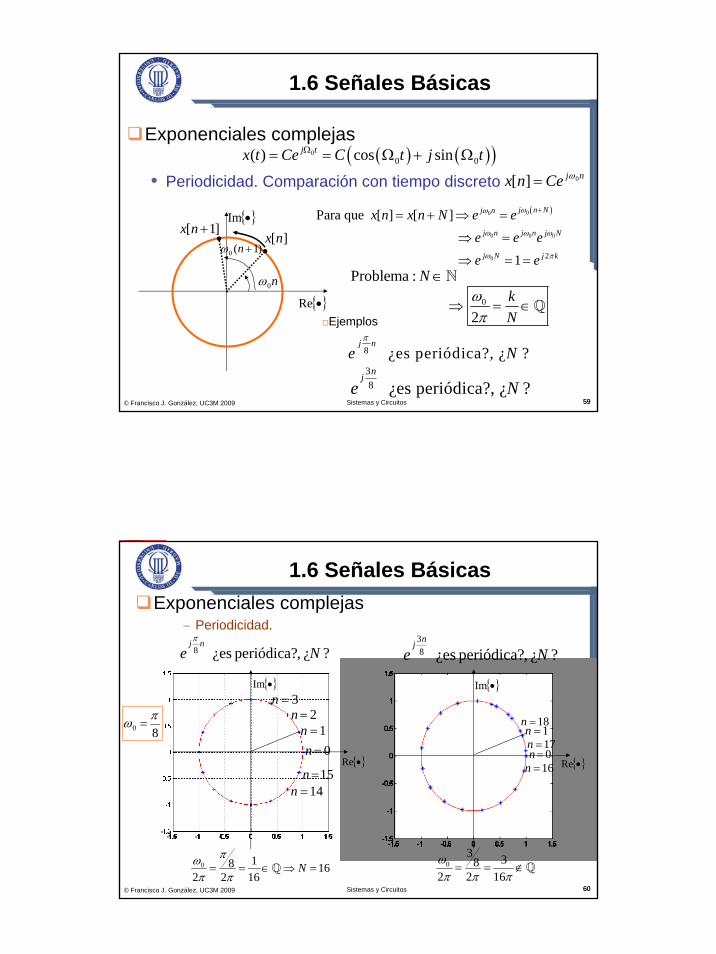
Exponenciales complejas
• Periodicidad. Comparación con tiempo discreto( ) ( )( )0
0 0( ) cos sinj tx t Ce C t j tΩ= = Ω + Ω
( )00
0 0 0
0 2
Para que [ ] [ ] 1
j n Nj n
j n j n j N
j N j k
x n x n N e ee e ee e
ωω
ω ω ω
ω π
+= + ⇒ =
⇒ =
⇒ = =
{ }•Re
{ }•Im
][nx
n0ω
njCenx 0][ ω=
0
2kN
ωπ
⇒ = ∈
Problema : N ∈
)1(0 +nω
]1[ +nx
Ejemplos
8 ¿es periódica?, ¿ ?j n
e Nπ
38 ¿es periódica?, ¿ ?nj
e N59Sistemas y Circuitos
60© Francisco J. González, UC3M 2009
1.6 Señales BásicasExponenciales complejas
− Periodicidad.
?¿ ,periódica? ¿es 8 Nenjπ
?¿ ,periódica? ¿es 83
Nenj
{ }•Im
80πω =
0=n1=n
2=n3=n
15=n14=n
0 18 162 2 16
Nπω
π π= = ∈ ⇒ =
{ }•Re
{ }•Im
0=n
1=n
{ }•Re16=n
17=n
18=n
03 38
2 2 16ωπ π π= = ∉
60Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 31
61© Francisco J. González, UC3M 2009
1.6 Señales Básicas
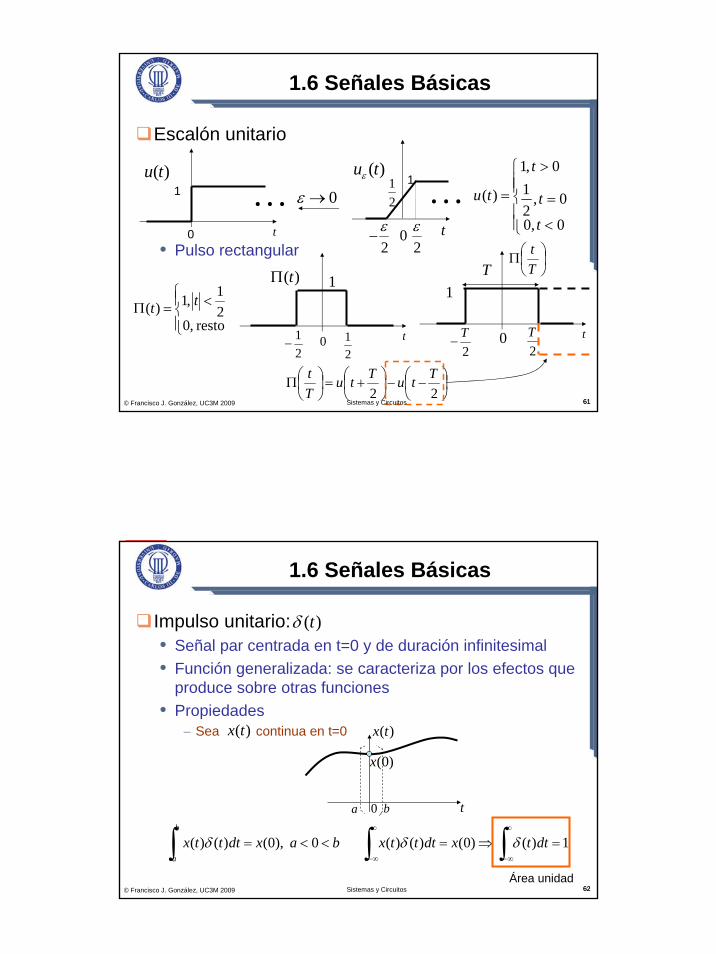
Escalón unitario
• Pulso rectangular
⎪⎪⎩
⎪⎪⎨
⎧
<
=
>
=
0,0
0,21
0,1
)(
t
t
t
tu
0 t
1)(tu 1
)(tuε
2ε
2ε
−
21
0 t
0→ε
⎪⎩
⎪⎨⎧ <=Π
resto ,021,1)( tt
t
)(tΠ
21
21
− 0 t
⎟⎠⎞
⎜⎝⎛Π
Tt
2T
2T
− 0
11
T
⎟⎠⎞
⎜⎝⎛ −−⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛Π
22TtuTtu
Tt
61Sistemas y Circuitos
62© Francisco J. González, UC3M 2009
1.6 Señales Básicas
Impulso unitario: • Señal par centrada en t=0 y de duración infinitesimal• Función generalizada: se caracteriza por los efectos que
produce sobre otras funciones • Propiedades
− Sea continua en t=0
)(tδ
)(tx
t0
)0(x
baxdtttxb
a
<<=∫ 0 ),0()()( δ 1)()0()()( =⇒= ∫∫∞
∞−
∞
∞−
dttxdtttx δδ
a b
Área unidad
)(tx
62Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 32
63© Francisco J. González, UC3M 2009
1.6 Señales Básicas
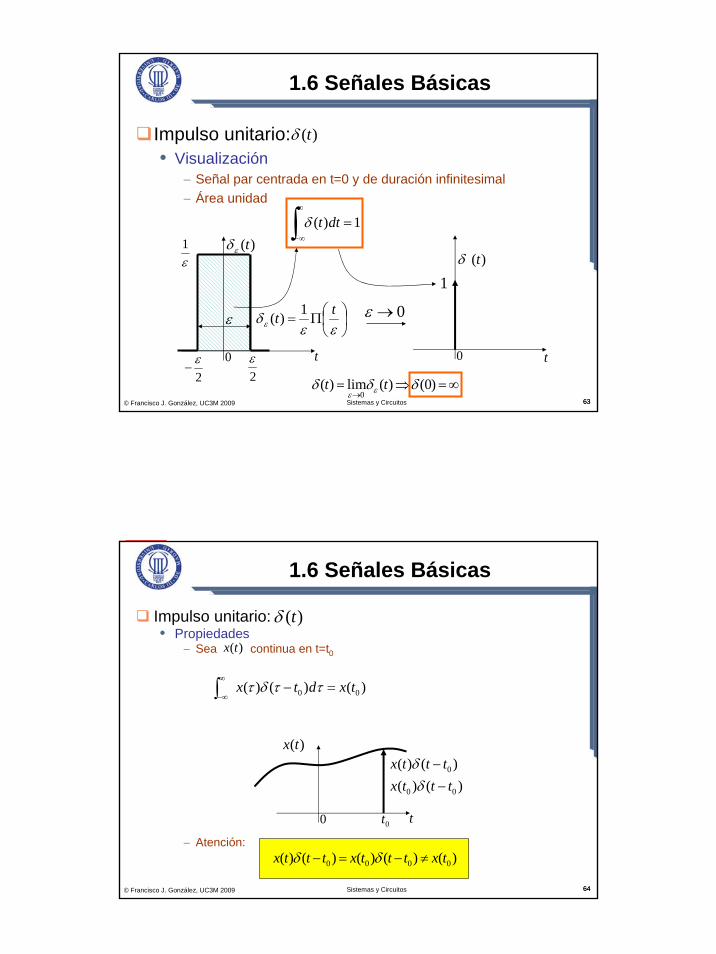
Impulso unitario: • Visualización
− Señal par centrada en t=0 y de duración infinitesimal− Área unidad
)(tδ
t0
)(tεδ1)( =∫
∞
∞−
dttδ
2ε
−2ε
ε1
ε ⎟⎠⎞
⎜⎝⎛Π=εε
δεtt 1)(
∞=⇒=→
)0()(lim)(0
δδδ εεtt
0
)(tδ
t
1
0→ε
63Sistemas y Circuitos
64© Francisco J. González, UC3M 2009
1.6 Señales Básicas
Impulso unitario: • Propiedades
− Sea continua en t=t0
− Atención:
)(tδ
)(tx
0 0( ) ( ) ( )x t d x tτ δ τ τ∞
−∞− =∫
t0
)(tx
0t
0
0 0
( ) ( )( ) ( )
x t t tx t t t
δδ
−−
)()()()()( 0000 txtttxtttx ≠−=− δδ
64Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 33
65© Francisco J. González, UC3M 2009
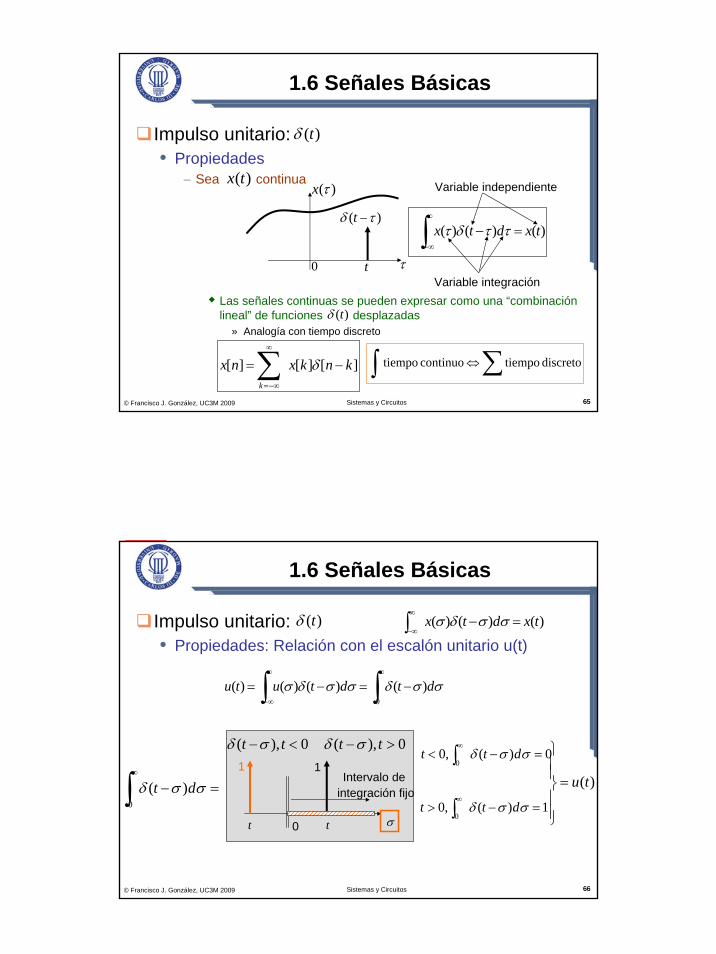
1.6 Señales Básicas
Impulso unitario: • Propiedades
− Sea continua
Las señales continuas se pueden expresar como una “combinación lineal” de funciones desplazadas
» Analogía con tiempo discreto
)(tδ
)(tx
t0
)(τx
][][][ knkxnxk
−=∑∞
−∞=
δ
)()()( txdtx =−∫∞
∞−
ττδτ
Variable integración
Variable independiente
∑∫ ⇔ discreto tiempocontinuo tiempo
τ
)( τδ −t
)(tδ
65Sistemas y Circuitos
66© Francisco J. González, UC3M 2009
1.6 Señales Básicas
Impulso unitario: • Propiedades: Relación con el escalón unitario u(t)
)(tδ
σσδσσδσ dtdtutu )()()()(0
−=−= ∫∫∞∞
∞−
=−∫∞
σσδ dt )(0
0 t σ
1
0),( >− tt σδ0),( <− tt σδ
Intervalo de integración fijo
t
1
( ) ( ) ( )x t d x tσ δ σ σ∞
−∞− =∫
00, ( ) 0t t dδ σ σ
∞< − =∫
00, ( ) 1t t dδ σ σ
∞> − =∫
( )u t
⎫⎪⎪ =⎬⎪⎪⎭
66Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 34
67© Francisco J. González, UC3M 2009
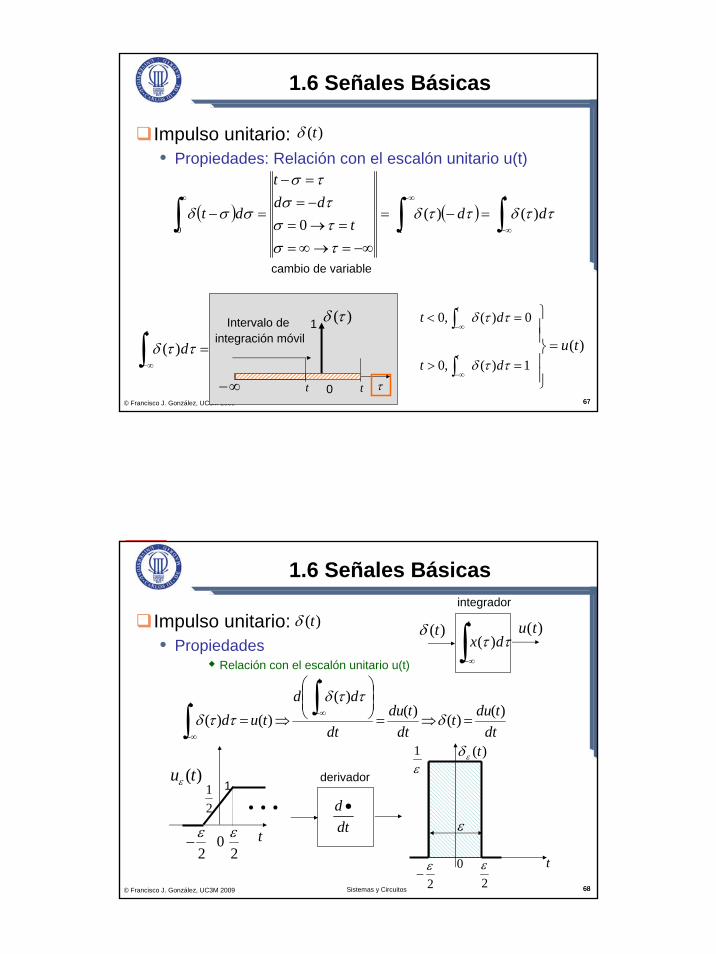
1.6 Señales Básicas
Impulso unitario: • Propiedades: Relación con el escalón unitario u(t)
)(tδ
=∫∞−
ττδ dt
)(
0 τ
1Intervalo de integración móvil
t
( ) ( ) ττδττδ
τστστσ
τσ
σσδ ddt
ddt
dtt
t
)()(00 ∫∫∫ ∞−
∞−∞
=−=
−∞=→∞==→=
−==−
=−
)(τδ
∞−
cambio de variable
t
0, ( ) 0t
t dδ τ τ−∞
< =∫( )u t
⎫⎪⎪ =⎬⎪⎪⎭
0, ( ) 1t
t dδ τ τ−∞
> =∫67
68© Francisco J. González, UC3M 2009
1.6 Señales Básicas
Impulso unitario: • Propiedades
Relación con el escalón unitario u(t)
)(tδ
dttdut
dttdu
dt
ddtud
t
t )()()()(
)()( =⇒=⎟⎟⎠
⎞⎜⎜⎝
⎛
⇒=∫
∫ ∞−
∞−
δττδ
ττδ
1)(tuε
2ε
2ε
−
21
0 t dtd •
t0
)(tεδ
2ε
−2ε
ε1
ε
∫∞−
t
dx ττ )()(tδ )(tu
integrador
derivador
68Sistemas y Circuitos
Tema 1. Señales
Sistemas y Circuitos 35
69© Francisco J. González, UC3M 2009
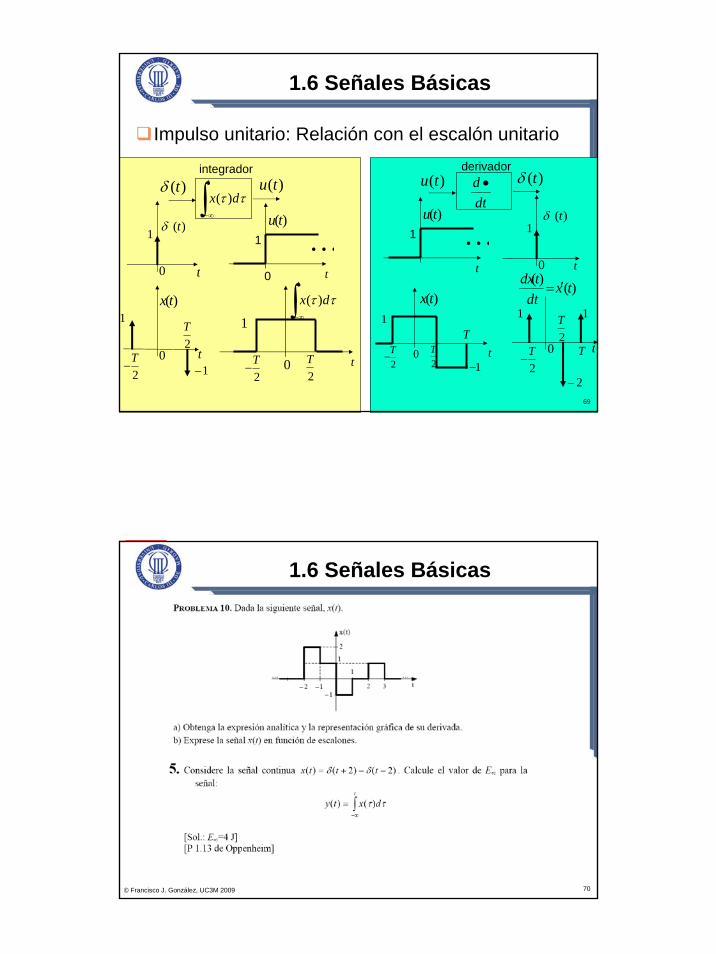
1.6 Señales Básicas
Impulso unitario: Relación con el escalón unitario
∫∞−
t
dx ττ )()(tδ )(tu
integrador
dtd •
derivador)(tδ)(tu
0 t
1)(tu
0
)(tδ
t
1
0
)(tδ1
t
1)(tu
t
t2T
2T− 0
1T
1−
)(tx
0 t
1
2−2T
−
2T
T
1
)()( txdt
tdx ′=
0 t
1
1−2T
−
2T
)(tx
t2T
2T
− 0
1∫∞−
t
dx ττ )(
69
70© Francisco J. González, UC3M 2009
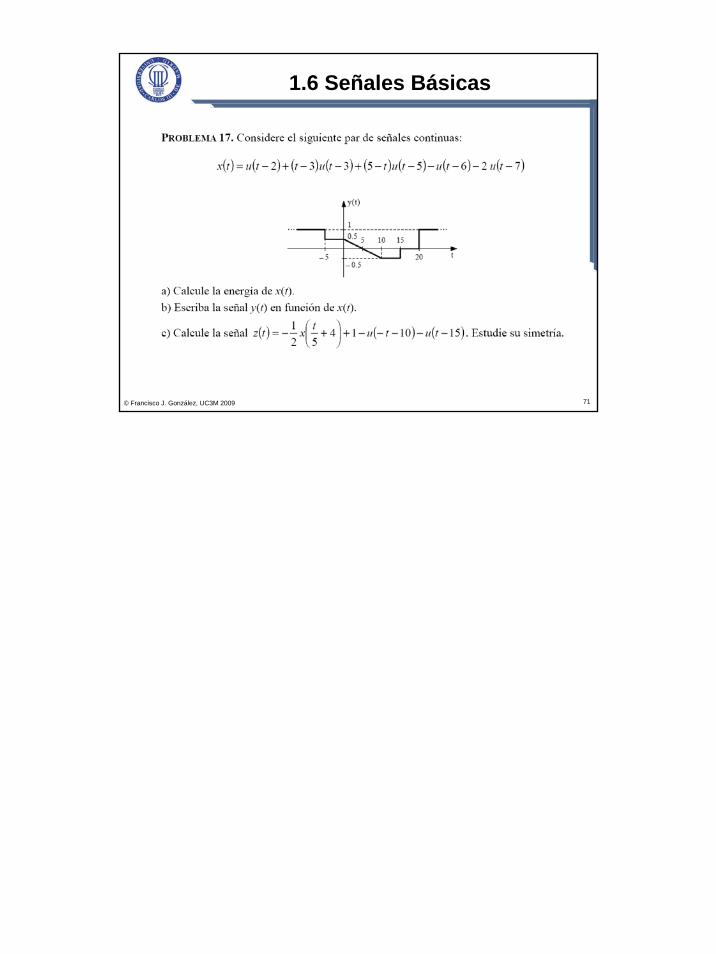
1.6 Señales Básicas
Tema 1. Señales
Sistemas y Circuitos 36
71© Francisco J. González, UC3M 2009
1.6 Señales Básicas