bibing.us.esbibing.us.es/proyectos/abreproy/11055/descargar_fichero/... · SÍNTESIS DIGITAL DE...
139
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS DEPARTAMENTO DE TEORÍA DE LA SEÑAL Y COMUNICACIONES CURSO 2004/2005 Autor: Daniel Gómez Díaz-Pinés Tutor: Rubén Martín Clemente
Transcript of bibing.us.esbibing.us.es/proyectos/abreproy/11055/descargar_fichero/... · SÍNTESIS DIGITAL DE...

SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
DEPARTAMENTO DE TEORÍA DE LA SEÑAL Y
COMUNICACIONES
CURSO 2004/2005 Autor: Daniel Gómez Díaz-Pinés
Tutor: Rubén Martín Clemente
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
1. Prólogo……………………………………………………………………. 3 2. Análisis del mecanismo del piano………………………………………... 5
2.1 Breve historia del piano………………………………………………. 6 2.2 Aspectos básicos de la acústica del piano……………………………. 8 2.3.Efectos de segundo orden…………………………………………….. 13
3. Afinación del piano. Introducción al sistema temperado………………… 20
3.1 Bases acústicas de la escala………………………………………….. 21 3.2 Proporciones interválicas ……………………………………………. 24 3.3 El sistema temperado………………………………………………… 28
4. Modelos de síntesis……………………………………………………….. 29 4.1. Modelos de señal…………………………………………………….. 30
4.1.1. Métodos de síntesis global…………………………………. 31 4.1.2. Métodos lineales………………………………………….... 46 4.1.3. Métodos de liberación de muestras………………………… 54
4.2. Modelos físicos………………………………………………………. 66 4.2.1. Método de diferencias finitas………………………………. 67 4.2.2. Síntesis modal……………………………………………… 72 4.2.3. Guiado digital de onda……………………………………... 73
5. El Sistema MIDI………………………………………………………….. 92 5.1 Aspectos básicos……………………………………………………… 93 5.2 Mensajes MIDI……………………………………………………….. 95 5.3 Secuenciadores y archivos MIDI……………………………………... 102 5.4 Sistema General MIDI (GM)…………………………………………. 104
6. Efectos de sonido comunes……………………………………………….. 105
6.1 Reverberación………………………………………………………… 106 6.2 Otros………………………………………………………………….. 117
7. Evolución y futuro de los métodos de síntesis…………………………….120
8. Análisis y síntesis de sonidos de piano……………………………………124
8.1. Análisis de sonidos PCM…………………………………………….. 124 8.2. Análisis de sonidos FM………………………………………………. 129 8.3. Síntesis de sonidos FM………………………………………………. 131
Bibliografía…………………………………………………………………… 134 Apéndice……………………………………………………………………… 136 Agradecimientos……………………………………………………………… 139
1. PRÓLOGO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
3
1. PRÓLOGO Desde tiempos inmemoriales, la música ha jugado un papel muy importante en todos los órdenes de la sociedad, tanto a nivel artístico como humano y social. La música es característica de prácticamente todas las culturas y civilizaciones, lo que sugiere que el instinto de hacer música es fundamental en la naturaleza humana.
Con la aparición de la tecnología digital, se desarrollan los primeros
instrumentos electrónicos, dispositivos que intentan simular la respuesta natural de un instrumento mecánico. En primer lugar, puede surgir la pregunta: ¿por qué utilizar una copia, que por muy elaborada siempre será imperfecta, pudiendo utilizar el original?. En este sentido los instrumentos electrónicos poseen muchas ventajas respecto a los originales mecánicos.
En primer lugar, poseen siempre una afinación perfecta, ya que los
parámetros de dicha afinación se encuentran almacenados en un chip de silicio y no son modificables por cualidades ambientales, atmosféricas o de cualquier otro tipo. Además la afinación puede variarse en cualquier momento sin más que modificar los parámetros numéricos de afinación almacenados, lo cual resuelve de un plumazo los problemas de afinación al interpretar piezas del repertorio antiguo, por no hablar del problema de la afinación de un conjunto de instrumentos como puede ser una orquesta. En segundo lugar, dado que la información relevante para la generación del sonido se encuentra concentrada en un microprocesador digital, el instrumento puede transportarse de manera cómoda, sobre todo en el caso de un piano, con sus evidentes problemas de movilidad y transporte. Dejando de lado características estéticas, el instrumento puede implementarse con cualquier apariencia y forma, con tal de que el interfaz sea el adecuado para la interpretación musical Por último, pero no menos importante, la cuestión económica. Los instrumentos tradicionales suelen construirse mediante un proceso de elaboración laborioso que se basa generalmente en sistemas de fabricación muy cercanos a la artesanía. Los instrumentos electrónicos, por el contrario, pueden fabricarse en serie una vez que el prototipo ha sido desarrollado, garantizando además una respuesta única y uniforme para todos los ejemplares
1. PRÓLOGO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
4
Por todo ello, gracias al desarrollo de los instrumentos electrónicos, sería posible, por un espacio comparado a un escritorio de oficina y por un precio no muy superior, disponer de un auténtico piano de concierto, comparable al mejor de los Steinways y que además permanece siempre en la más perfecta afinación. Aunque la situación actual se encuentra lejos todavía de reproducir de manera completamente fiel la respuesta de los instrumentos mecánicos, el progreso imparable puede hacer que en un futuro no muy lejano, los instrumentos electrónicos puedan reemplazar a los mecánicos en la ejecución de alto nivel, sin prejuicio de la expresión artística. De hecho, ya actualmente los estudios de grabación utilizan gran cantidad de técnicas de procesamiento digital en sus grabaciones, algunas de las cuales se derivan del estudio de la síntesis digital de los instrumentos involucrados.
En este trabajo se analizarán, haciendo hincapié en los sonidos de piano en particular, los distintos métodos de síntesis, es decir los diferentes algoritmos que logran producir sonidos realistas y musicalmente interesantes en tiempo real. El propósito de este documento no es mostrar con exactitud los detalles de cada método, sino ofrecer una visión de conjunto de varios métodos de síntesis sonora. Las técnicas de síntesis analizadas fueron elegidas como ejemplos representativos del modelo de síntesis general al que se refieren.
No obstante, para comprender el motivo de determinadas
operaciones en los modelos de síntesis, es necesario realizar un estudio previo, aunque somero, del instrumento objeto de estudio, El Piano, así como del sistema musical occidental general, que es la base para cualquier generación de sonidos, ya sea natural o artificial. Estos conceptos se explican en capítulos previos a las técnicas de síntesis.
Posteriormente, y como complemento, es necesario incluir aspectos
relacionados con los instrumentos musicales digitales que, aunque no intervienen directamente en la generación del sonido, son totalmente imprescindibles para su elaboración y forman una parte importante del resultado final, por lo que no pueden pasarse por alto. Estos aspectos son el protocolo MIDI, indispensable para la comunicación entre el músico y el sintetizador y los efectos sonoros, tan relevantes en la consecución de una respuesta musical artísticamente satisfactoria.
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
5
2. ANÁLISIS DEL MECANISMO DEL PIANO En este capitulo se analizarán los aspectos más relevantes de la mecánica del piano que serán necesarios a la hora de sintetizar un sonido realista del instrumento. Sólo se tendrán en cuenta las particularidades asociadas con la generación del sonido, dejando de lado otros aspectos de la mecánica relacionados con la técnica pianística (dureza de tecla, transferencia de peso….) que, aunque muy importantes para la ejecución pianística, no son objeto de estudio del presente trabajo. Así pues se analizarán los distintos elementos generadores del sonido: martillos, cuerdas, tabla armónica, apagadores…, focalizando nuestra atención más en los efectos sonoros que producen cuya simulación es el objetivo de todo modelo de síntesis, y menos en el mecanismo físico que los producen, aunque en muchas ocasiones causa y efecto se encuentran tan indisolublemente unidos que se hace absolutamente necesario estudiar ambos en conjunto.
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
6
2.1. Breve historia del piano
Hasta el siglo XVIII convivieron tres grandes familias de instrumentos de teclado. Los instrumentos de cuerda pinzada, como el clave, virginal o espineta; los instrumentos de cuerda golpeada, como el clavicordio; y finalmente el órgano, cuyo mecanismo de producción del sonido lo asemeja más a la familia de los vientos.
El clavicordio, que puede considerarse el antecedente directo del
piano, permitía realizar matices dinámicos (piano, forte), realizar fraseo, e incluso imitar a los cantantes en el vibrato. Su principal inconveniente era su reducido volumen de emisión del sonido, lo que impedía la ejecución en público, por pequeño que fuera el auditorio. De la búsqueda de un mayor incremento dinámico y de riqueza de contrastes, surge en 1705, en los talleres de un constructor de instrumentos de teclado llamado Cristofori, el nuevo Gravicembalo col piano e forte que pronto fue conocido con el nombre de fortepiano.
El fortepiano primitivo, no alcanzaba una gran sonoridad, ni una
elevada variedad tímbrica, pero poseía características que han llegado hasta nuestros días como la percusión desde abajo, un sistema que permitiera a la cuerda vibrar libremente tras la percusión, y una palanca suficientemente larga y sensible para transmitir eficazmente las variaciones de velocidad durante el descenso de la tecla.
Durante el siglo XIX conviven dos tipos de fortepianos. Los de
mecánica vienesa, conectaban directamente el macillo a la tecla mediante una bisagra y poseían por tanto una acción ligera y de pequeño calado. En los de mecánica inglesa, en cambio, el macillo estaba atado al instrumento, y una serie de palancas, permitía multiplicar la velocidad del macillo, mientras que la tensión de las cuerdas implicaba un bastidor más sólido y resistente
El camino que conduce hasta el moderno piano de concierto no es
más que un perfeccionamiento progresivo de la mecánica inglesa, unido al mecanismo de doble repetición inventado por Sebastián Erard, a mediados del siglo XIX y que permite al macillo volver a percutir la cuerda antes de que vuelva a su posición de reposo.
En el siglo XX, pocas modificaciones de relieve se han añadido al
diseño del piano, que esencialmente es el mismo de finales del XIX. Sin
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
7
embargo a finales del siglo XX, aparece el “piano electrónico” al que podríamos perfectamente designar como un nuevo instrumento, dadas las diferencias de mecánica, así como de generación del sonido. La idea del sintetizador, que busca inicialmente la imitación, por síntesis digital, de los instrumentos sinfónicos, pronto se visualiza como un camino potencial para la búsqueda de nuevas sonoridades y nuevos medios de expresión. Sin embargo, en lo que respecta concretamente a la imitación del sonido del piano, queda aún mucho trabajo por hacer en este campo.
A la vista del rápido desarrollo de nuevos instrumentos basados en
generación digital del sonido, surge la tentación de especular sobre el futuro de los instrumentos tradicionales. Es más que probable, que en el futuro, conseguida ya una imitación perfecta del sonido y la mecánica del piano, la mayor parte de la música se interprete con instrumentos electrónicos, ya que pueden lograrse extrapolaciones a nuevos sonidos, matices y niveles dinámicos, que no eran accesible por los originales, así como resuelven el fastidioso problema de la afinación.
Es difícil deducir a priori, si los sonidos de piano pertenecen al grupo
de sonidos tradicionales que perdurarán frente a los sonidos de nueva generación. No obstante, habida cuenta de la actual popularidad del piano y de la lenta evolución en cuestión de gusto musical, es posible profetizar que el sonido pianístico gozará de una salud envidiable al menos por otros 300 años.
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
8
2.2. Aspectos básicos de la acústica del piano Mecánica básica
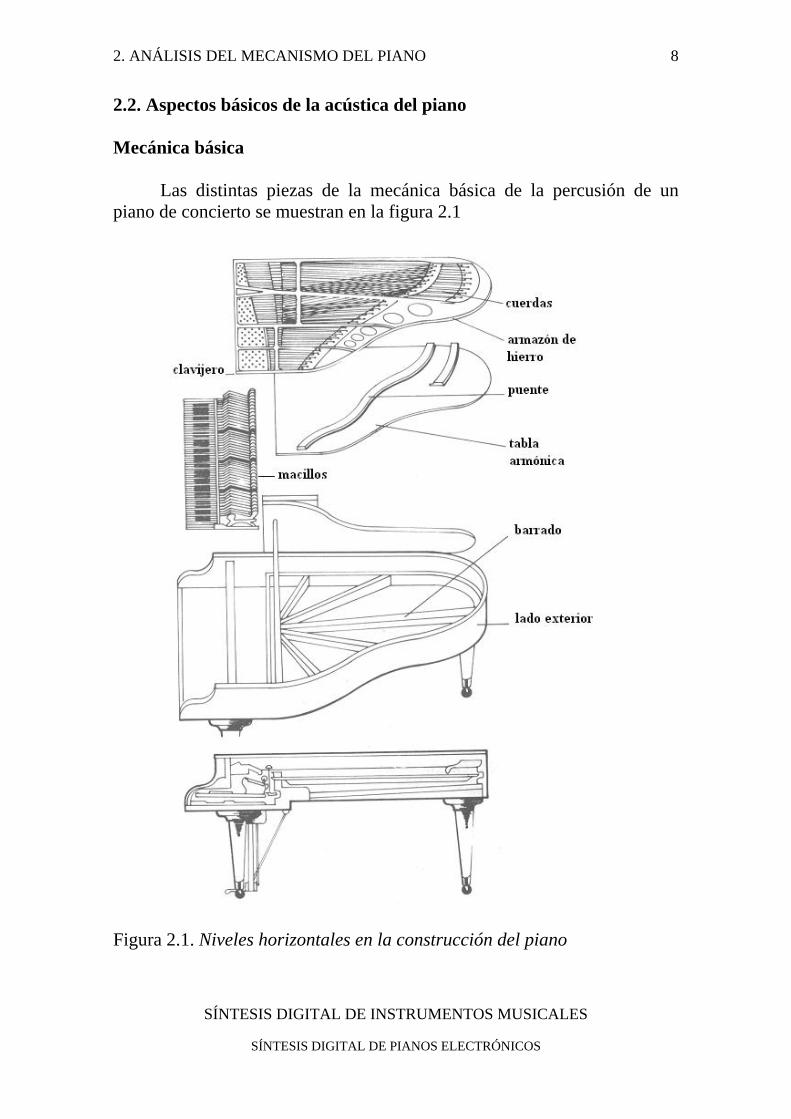
Las distintas piezas de la mecánica básica de la percusión de un piano de concierto se muestran en la figura 2.1
Figura 2.1. Niveles horizontales en la construcción del piano
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
9
El elemento productor del sonido es una cuerda de acero. Cada una
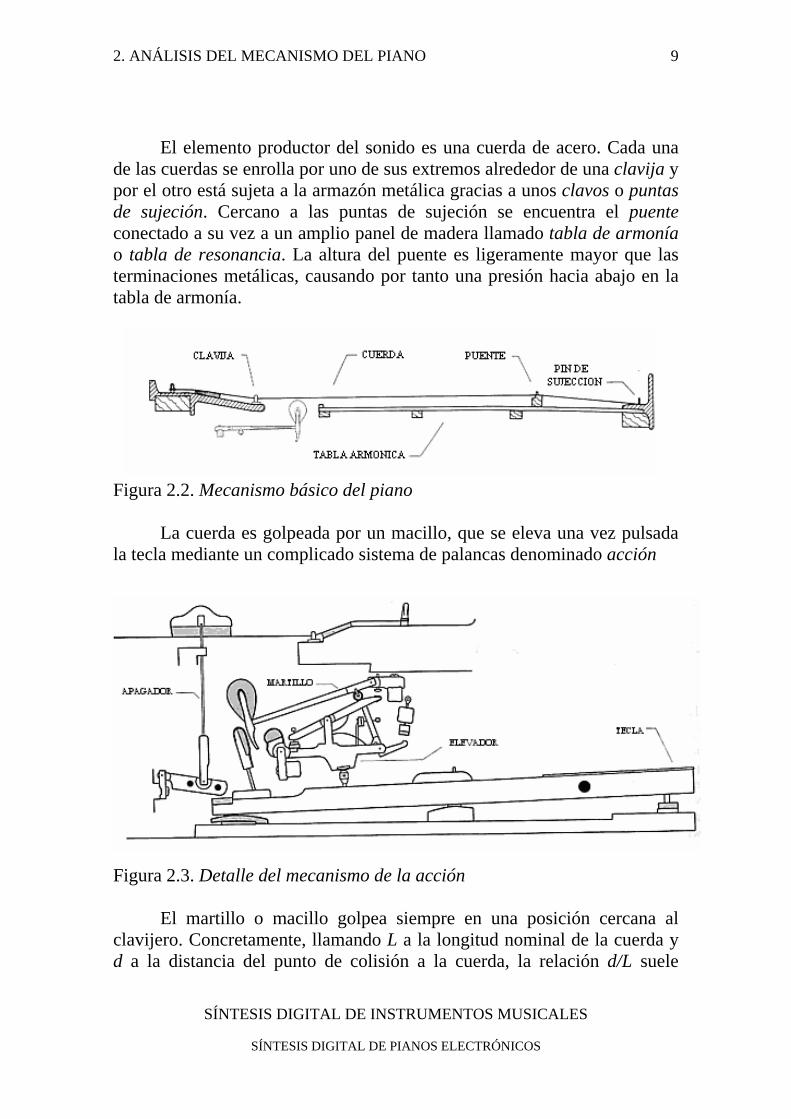
de las cuerdas se enrolla por uno de sus extremos alrededor de una clavija y por el otro está sujeta a la armazón metálica gracias a unos clavos o puntas de sujeción. Cercano a las puntas de sujeción se encuentra el puente conectado a su vez a un amplio panel de madera llamado tabla de armonía o tabla de resonancia. La altura del puente es ligeramente mayor que las terminaciones metálicas, causando por tanto una presión hacia abajo en la tabla de armonía.
Figura 2.2. Mecanismo básico del piano La cuerda es golpeada por un macillo, que se eleva una vez pulsada
la tecla mediante un complicado sistema de palancas denominado acción
Figura 2.3. Detalle del mecanismo de la acción El martillo o macillo golpea siempre en una posición cercana al clavijero. Concretamente, llamando L a la longitud nominal de la cuerda y d a la distancia del punto de colisión a la cuerda, la relación d/L suele
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
10
oscilar entre 1/7 y 1/9. Reducir la distancia d generalmente proporciona un tono débil, debido a que el primer armónico tendrá menos energía. Aumentarla demasiado puede provocar un tono borroso y poco claro. Generación del sonido
Cuando el macillo golpea la cuerda, ésta se deforma en el punto de colisión apareciendo dos ondas en la cuerda, viajando en direcciones opuestas. El frente de ondas resultante es un pulso, cuya anchura va aumentando hasta que uno de los frentes de onda se refleja en la clavija (que es la terminación más cercana al punto de colisión). Dado que el clavijero puede considerarse como una terminación rígida, el coeficiente de reflexión es negativo, lo que significa que la onda, se refleja hacia abajo, invirtiendo el sentido de la perturbación y devolviendo el desplazamiento al nivel de equilibrio. Por tanto el frente de ondas que se desplazaba inicialmente hacia la izquierda se convierte ahora en la cola trasera de un pulso de anchura fija. Cuando el pulso llega al puente sufre de nuevo una reflexión y así sucesivamente. La longitud de la cuerda, junto con la velocidad de propagación en el medio determina el tiempo de ida y vuelta del pulso y por tanto el periodo de la onda pulsante resultante del recorrido del pulso por la cuerda. La velocidad de propagación del pulso en la cuerda queda determinada por la tensión (a mayor tensión mayor velocidad) y la masa por unidad de longitud (cuanto más ligera sea la cuerda mayor velocidad). La frecuencia fundamental de la onda resultante o lo que es lo mismo la frecuencia del tono percibido queda determinada pues la longitud de la cuerda, su tensión y su densidad lineal. En particular, la longitud y densidad suelen intercambiarse para reducir el tamaño del instrumento, sobre todo en los bajos, que requerirían de una longitud excesiva (a menor frecuencia, mayor periodo y por tanto mayor longitud). Por ello, con objeto de disminuir la longitud, las cuerdas graves, también llamadas bordones, se fabrican en acero hilado en cobre.
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
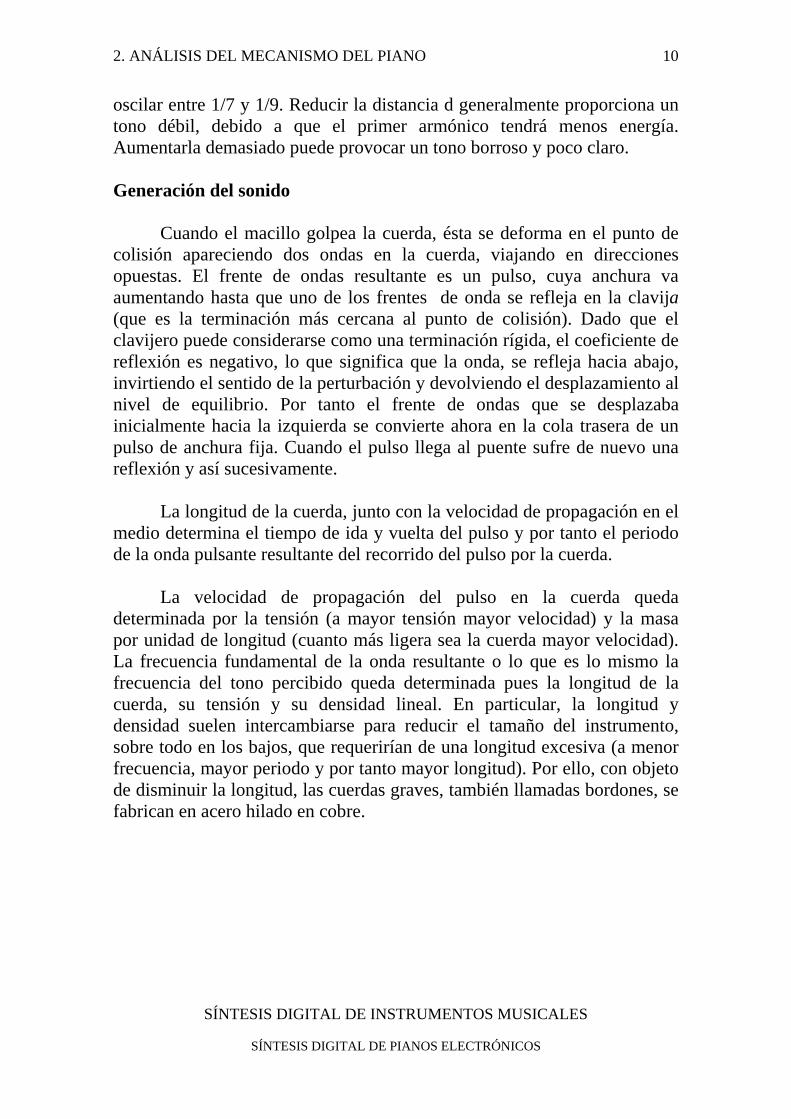
11
Figura 2.4 Propagación del pulso inicial y Análisis espectral del pulso viajero. La onda formada por el pulso recorriendo la cuerda en toda su longitud puede descomponerse en suma de los armónicos de la cuerda vibrante. El armónico fundamental, cuya longitud de onda es el doble de la longitud de la cuerda determina la frecuencia del tono percibido, mientras que los armónicos secundarios proporcionan el timbre característico del sonido del piano. En pianos reales, las frecuencias de resonancia de las cuerdas no son exactamente armónicas, por lo que la relación entre los armónicos no es proporcional. Esto significa que la vibración de la cuerda no será completamente periódica conforme el tiempo avance, lo que confiere una cualidad menos mecánica y más “viva” al sonido resultante
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
12
Amplificación del sonido Desafortunadamente, la cuerda vibrante por sí sola no puede generar ningún sonido de forma eficaz y necesita por ello de un mecanismo amplificador. Esto se consigue en un piano mediante la tabla armónica o tabla de resonancia, que es un radiador mucho más eficiente del sonido y a la que se conectan las cuerdas por medio del puente. Sin embargo, la tabla de armonía es mucho más pesada que la cuerda, lo que significa que la cuerda no podrá hacer vibrar a la tabla de resonancia y la energía seguirá atrapada en la cuerda En términos ingenieriles, existe una desadaptación de impedancias entre la cuerda y la tabla. Desde el punto de vista de la cuerda, la tabla tiene una gran impedancia de entrada, lo que significa que para adaptar impedancias debemos incrementar la impedancia mecánica de la cuerda. Esto puede lograrse haciendo la cuerda más pesada o bien incrementando la tensión. En cualquier caso esto afecta a la rigidez y por tanto al timbre deseado del piano. Por ello, la solución más común consiste en usar para cada nota dos o tres cuerdas afinadas a la misma frecuencia (o casi), aumentando así la energía transferida y por tanto el volumen sonoro Sin embargo la amplificación sonora supone un sacrificio en la duración del sonido. Ya sabemos que el pianista no puede suministrar continuamente energía a la cuerda y por tanto la nota emitida está condenada a extinguirse. Pero la velocidad de decaimiento está reñida con la amplificación sonora, de modo que si ajustamos demasiado las impedancias de la cuerda y la tabla de resonancia obtendremos un tono de gran volumen sonoro pero de escasa duración, en cambio si usamos cuerdas más ligeras y menos tensas, obtendremos un tono más duradero pero de menor sonoridad. Este compromiso entre duración y volumen es un difícil de conciliar, ya que la impedancia de la tabla de resonancia puede variar bruscamente de nota a nota.
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
13
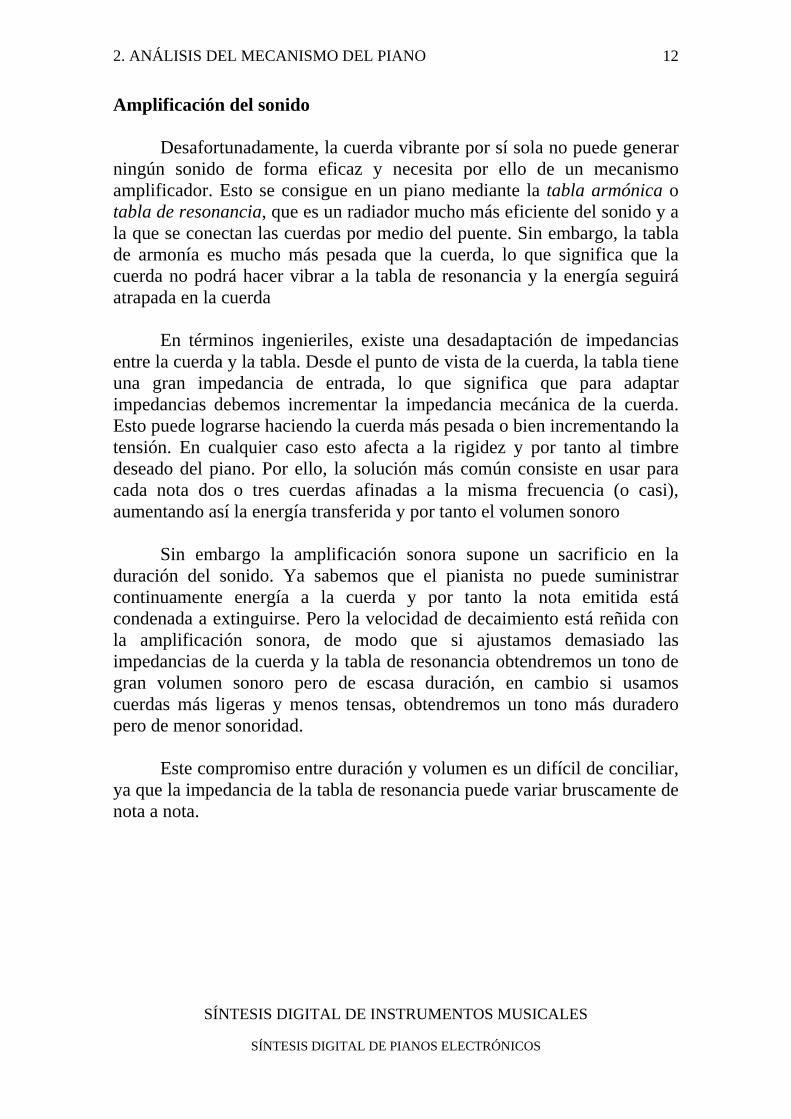
2.3. Efectos de segundo orden Rigidez no lineal del martillo Volviendo a la excitación original de la cuerda por el golpe de martillo, no solo la amplitud del pulso cambia con la fuerza del impacto, sino también la forma del mismo. Esto significa que una nota en forte no es solo la versión amplificada de una nota en piano. Esto tiene consecuencias muy importantes en la síntesis digital del sonido de piano. La razón de este efecto reside en una peculiaridad de los macillos denominada rigidez no lineal. Esta característica consiste en que el martillo, es sentido como un material suave por la cuerda cuando es golpeada a un nivel dinámico pequeño (menor velocidad) y se transforma en un material mucho más rígido cuando la cuerda es golpeada a gran velocidad. Esta diferencia de rigidez en el martillo según el nivel dinámico, hace que una nota en forte, genere un pulso inicial mucho más abrupto que una nota en piano, por lo que la primera tendrá un componente espectral mucho mayor que la segunda. Figura 2.5. Diferencias en el espectro de los distintos niveles dinámicos.
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
14
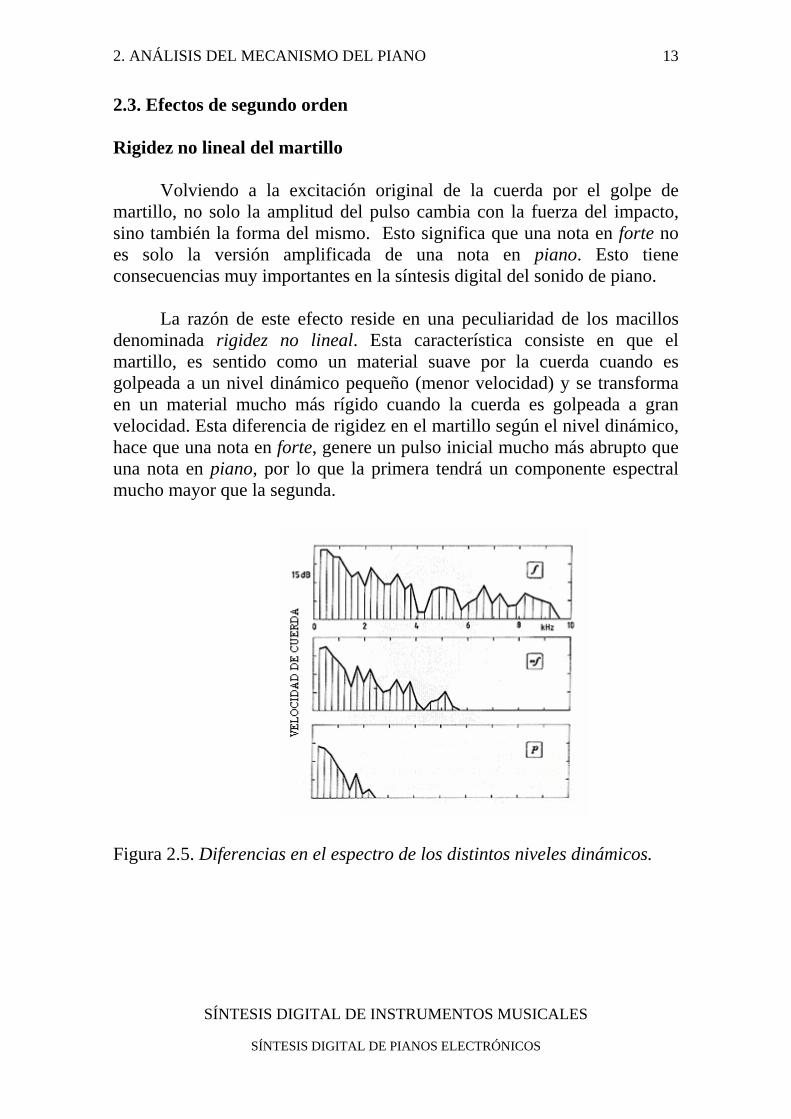
Acoplamiento entre cuerdas Otro efecto de segundo orden en la generación del tono en el piano se obtiene por el hecho comentado anteriormente de la necesidad de usar más de una cuerda por nota para lograr un compromiso adecuado entre volumen y duración del tono. En la figura, se muestra la función típica de decaimiento para un tono de piano. La cuerda es golpeada aproximadamente en 2=t y el apagador se libera aproximadamente en 17=t . Se observa claramente que la curva puede dividirse en dos regiones. La región inicial, a la que podríamos denominar tono transitorio, decae con mayor rapidez que en la segunda región, que podríamos denominar tono permanente. Figura 2.6. Nivel de Presión sonora frente al tiempo.
El comportamiento de la curva se explica mediante la existencia de dos modos distintos de vibración, un modo con polarización vertical y otro con horizontal. El modo polarizado verticalmente, es el principal modo excitado por el martillo, así que comienza a una amplitud mucho mayor que el horizontal. Sin embargo, dado que el puente, mediante el que se conecta la cuerda a la tabla de resonancia, no opone tanta resistencia en la dirección horizontal como en la vertical, el decaimiento del modo verticalmente polarizado es mucho más rápido. Por tanto, una cantidad relativamente apreciable de vibración horizontal se convierte, tras el transitorio, en la componente dominante.
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
15
Sin embargo, el principal mecanismo en la generación de este tono permanente, no es la existencia de estos dos modos, sino el acoplamiento dinámico entre las 2 o 3 cuerdas golpeadas por el mismo martillo.
Para simplificar la cuestión, pensemos en dos cuerdas atadas al mismo puente. Para estas cuerdas es posible vibrar en fase (modo simétrico), o en oposición de fase (modo antisimétrico). En el caso antisimétrico, las fuerzas ejercidas por el puente se cancelarán, transmitiendo poca energía a la tabla de resonancia, con lo que el decaimiento del tono será lento. En el caso simétrico, la fuerza en el puente será mucho mayor que en el caso de una sola cuerda, así que la energía transmitida a la tabla de resonancia será mayor así como la tasa de decaimiento.
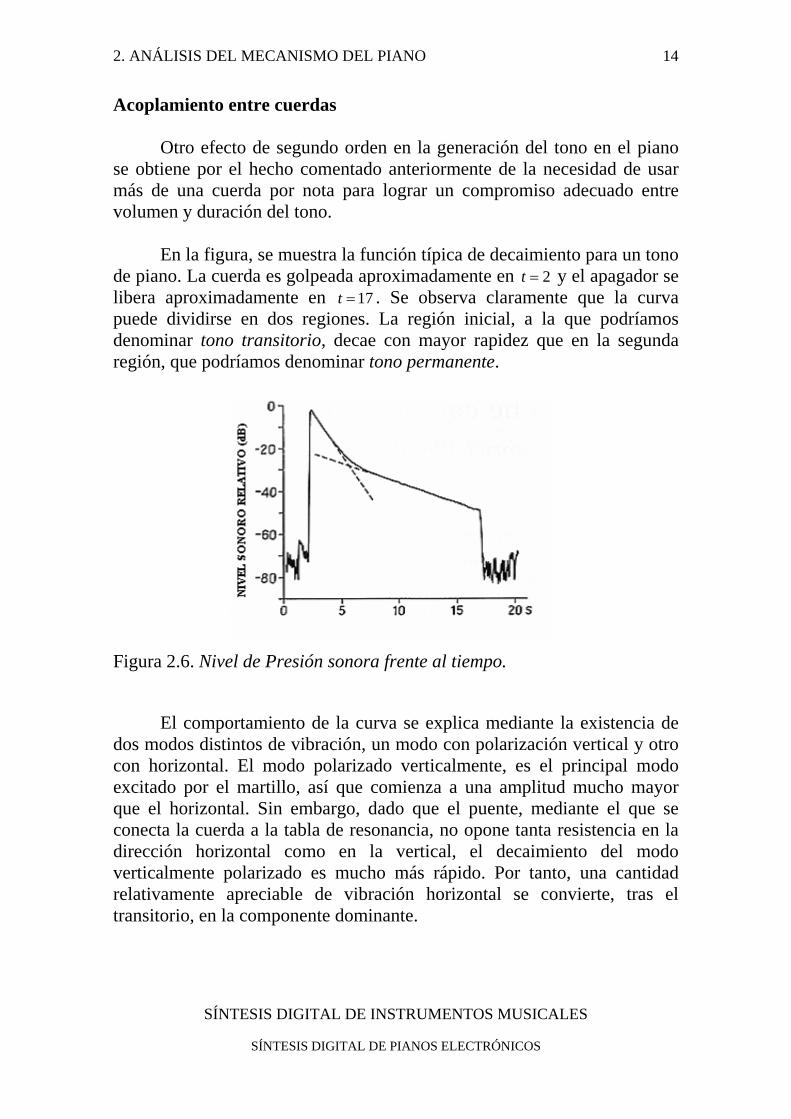
En la figura puede apreciarse la diferencia entre el decaimiento del tono para una sola cuerda y para dos cuerdas acopladas. Puede verse claramente, que un nuevo modo de vibración aparece, en el cual la cuerda original puede vibrar por un tiempo mucho mayor antes de perder totalmente su energía. Este es el modo denominado anteriormente como antisimétrico.
Figura 2.7. Diferencias entre el decaimiento para una cuerda y dos cuerdas conectadas al mismo puente.
Sin embargo, el modo en que el cerebro procesa los sonidos permite tomar ventaja de esta situación. Un sonido es percibido como fuerte si comienza fuerte, incluso aunque decaiga rápidamente y es percibido como sostenido, incluso si es muy débil. Por tanto, un sonido que comience con un volumen elevado transitorio y que decaiga rápidamente a un régimen permanente de tono sostenido aunque débil, será percibido conjuntamente como forte y sostenuto

2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
16
Inarmonicidad Los armónicos del sonido de piano, no son exactamente múltiplos enteros de la frecuencia fundamental. El espectro completo está algo más expandido y la diferencia entre parciales es mayor que la frecuencia fundamental. Típicamente, el décimo parcial toma la frecuencia del que sería el undécimo en un caso totalmente armónico. En principio, puede pensarse que esta inarmonicidad, es un factor a minimizar. Sin embargo, contribuye a la formación del tono de piano y es un responsable principal de su singularidad, añadiendo cierta “calidez” al sonido. Mediante simulación, puede demostrarse que un piano sin inarmonicidad sonaría artificial, por tanto será un factor a tener en cuenta a la hora de modelar el sonido de piano. Este fenómeno puede atribuirse a la rigidez inherente a las cuerdas del piano, que produce una fuerza elástica que tiende a restaurar el estado inicial oponiéndose a la perturbación. Esto lleva a la dispersión de las ondas durante la propagación. La velocidad de fase de las ondas de alta frecuencia es mayor que las de baja frecuencia y por tanto las frecuencias más altas alcanzan el puente en un tiempo algo menor. Considerando la ecuación de ondas de una cuerda rígida y sin pérdidas:
4
42
2
22
2
2
tyK
xyc
ty
∂∂
−∂∂
=∂∂ (2.1)
ρTc =
ρEIK =
64
40d
Iπ
= (2.2)
Donde y es el desplazamiento transversal, x la posición a lo largo de la cuerda, t el tiempo, c la velocidad de onda, K el coeficiente de rigidez, ρ la masa lineal y T la tensión. E es el módulo de Young de la cuerda e I su momento de inercia que depende del diámetro de la cuerda 0d . Resolviendo la ecuación de onda para rigidez pequeña (K<<1), se obtienen los siguientes modos:
20 1 Bnnffn += para n>0 (2.3)
ρT
Lf
21
0 = 2
2
TLEIB π
= (2.4)
Donde 0f es la frecuencia fundamental, B el factor de inarmonicidad.
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
17
Puede verse por tanto, que el factor de inarmonicidad es proporcional al diámetro de la cuerda (a su cuarta potencia). A mayor diámetro, la cuerda tiene mayor rigidez, asemejándose cada vez más a una barra rígida. Esta es otra razón por la cual, las cuerdas del registro grave se fabrican en acero hilado en cobre, de forma helicoidal y no simplemente aumentando el grosor de la cuerda. El factor de inarmonicidad es también inversamente proporcional a la longitud de la cuerda (a su cuadrado). Por tanto, los pianos de cola son menos inarmónicos que los pianos verticales. Al oído, los sonidos de piano parecen más inarmónicos en el registro grave que en el agudo. Una de las razones es que las cuerdas graves contienen más parciales que las agudas, permitiendo una mayor percepción de la inarmonicidad. Otra razón es que el umbral de audición está cercano a la inarmonicidad del piano en el rango agudo.
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
18
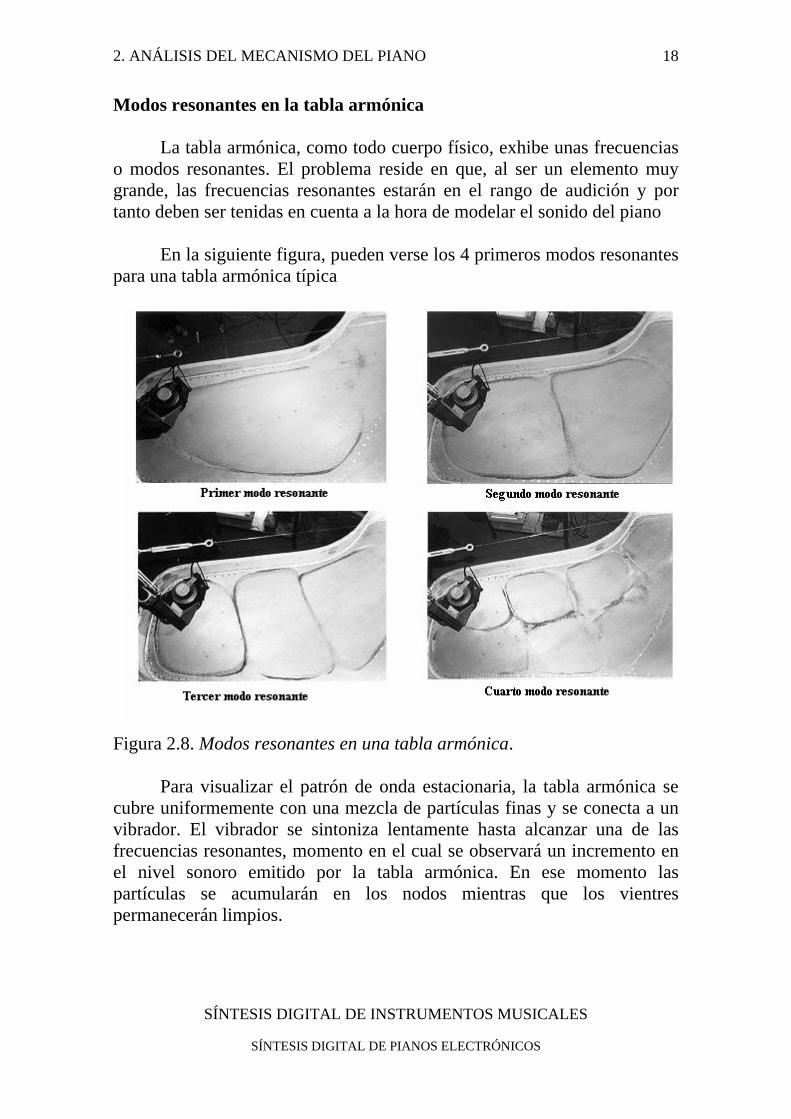
Modos resonantes en la tabla armónica La tabla armónica, como todo cuerpo físico, exhibe unas frecuencias o modos resonantes. El problema reside en que, al ser un elemento muy grande, las frecuencias resonantes estarán en el rango de audición y por tanto deben ser tenidas en cuenta a la hora de modelar el sonido del piano En la siguiente figura, pueden verse los 4 primeros modos resonantes para una tabla armónica típica
Figura 2.8. Modos resonantes en una tabla armónica. Para visualizar el patrón de onda estacionaria, la tabla armónica se cubre uniformemente con una mezcla de partículas finas y se conecta a un vibrador. El vibrador se sintoniza lentamente hasta alcanzar una de las frecuencias resonantes, momento en el cual se observará un incremento en el nivel sonoro emitido por la tabla armónica. En ese momento las partículas se acumularán en los nodos mientras que los vientres permanecerán limpios.
2. ANÁLISIS DEL MECANISMO DEL PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
19
La frecuencia del modo resonante más bajo suele estar en torno a los 50 Hz. En este modo, el centro de la tabla armónica vibra violentamente (vientre) mientras que los bordes permanecen estáticos (nodos). La tabla armónica pierde rápidamente su efectividad como elemento radiante y amplificador del sonido a frecuencias por debajo de las del primer modo resonante, así que los tonos por debajo de 50 Hz no suelen tener mucha energía en su primer armónico. El patrón de vibración de la tabla armónica, con sus modos resonantes, deberá tenerse en cuenta a la hora de modelar el sistema de síntesis, especialmente en los modelos físicos, en los cuales se busca simular el mecanismo físico de generación del sonido.

3. AFINACIÓN DEL PIANO. INTRODUCCIÓN AL SISTEMA TEMPERADO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
20
3. Afinación del piano. Introducción al sistema temperado A la hora de diseñar nuestro modelo de síntesis, es necesario conocer los fundamentos del fenómeno físico armónico y sus efectos sobre la afinación del piano moderno. La relación en frecuencia entre los intervalos más importantes así como entre semitonos consecutivos es de capital importancia en la construcción de modelos de síntesis, en los cuales a menudo se generan tonos secundarios a partir de un conjunto de tonos básicos. Por tanto es necesario describir, aunque someramente, la estructura matemática del sistema musical occidental y su aplicación práctica en la afinación del piano.
3. AFINACIÓN DEL PIANO. INTRODUCCIÓN AL SISTEMA TEMPERADO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
21
3.1. Bases acústicas de la escala En la Grecia antigua, los matemáticos sabían que las relaciones interválicas más sencillas entre los sonidos corresponden con exactitud a proporciones simples, expresadas en números enteros pequeños, entre las longitudes de una cuerda vibrante. Si una cuerda pulsada que produce un determinado sonido se acorta, por ejemplo, la mitad exacta de su longitud, el sonido resultante es una octava más aguda que el original, suponiendo que la tensión de la cuerda se mantiene constante. La misma cuerda acortada sólo un tercio de su longitud, suena una quinta justa más aguda; otras proporciones simples dan otros intervalos.
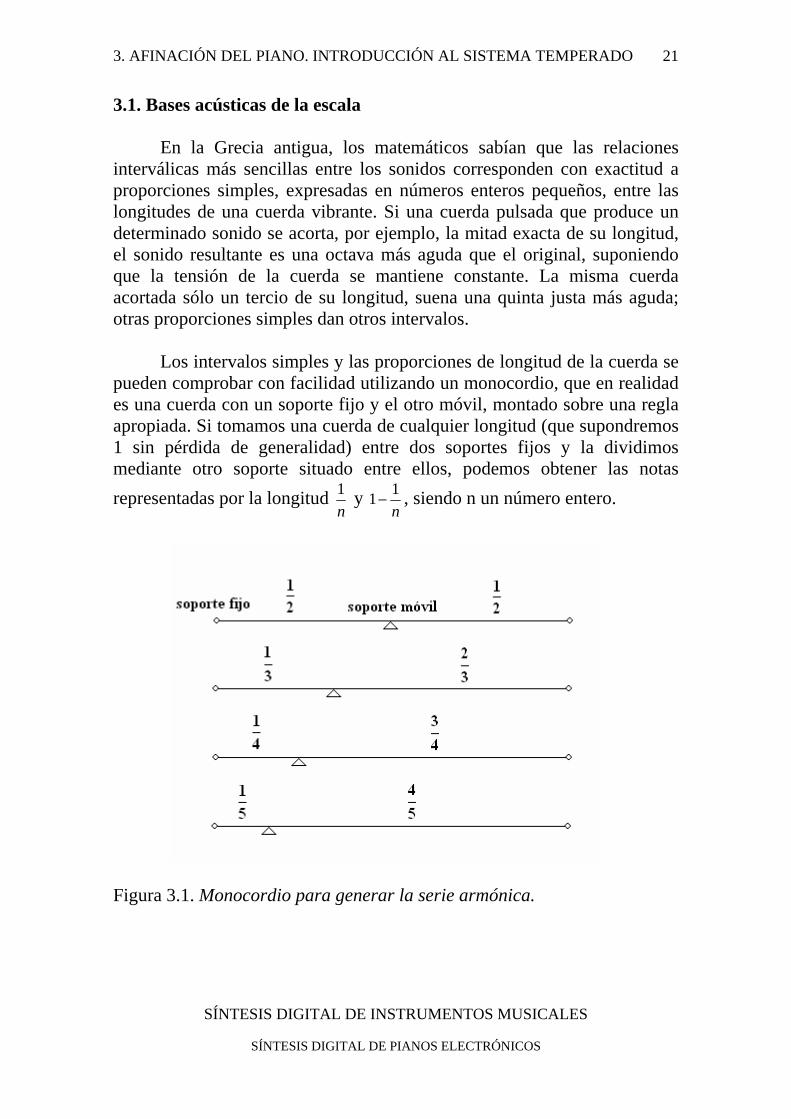
Los intervalos simples y las proporciones de longitud de la cuerda se pueden comprobar con facilidad utilizando un monocordio, que en realidad es una cuerda con un soporte fijo y el otro móvil, montado sobre una regla apropiada. Si tomamos una cuerda de cualquier longitud (que supondremos 1 sin pérdida de generalidad) entre dos soportes fijos y la dividimos mediante otro soporte situado entre ellos, podemos obtener las notas representadas por la longitud
n1 y
n11− , siendo n un número entero.
Figura 3.1. Monocordio para generar la serie armónica.

3. AFINACIÓN DEL PIANO. INTRODUCCIÓN AL SISTEMA TEMPERADO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
22
Supongamos que la cuerda sin dividir, de longitud 1, suena como el Do-2 a dos octavas por debajo del Do-4 central del piano. Comprobaremos que las longitudes de los segmentos mostrados en el diagrama anterior sonarán de la siguiente manera: Figura 3.2. Generación de los cuatro primeros armónicos de la nota Do-2. El proceso de división no se puede prolongar demasiado sin llegar a longitudes de la cuerda tan pequeñas que resultarían impracticables. Sin embargo, suponiendo que podamos medirlas exactamente, las longitudes
n1
darían los siguientes sonidos: Figura 3.3. Serie armónica de Do.
3. AFINACIÓN DEL PIANO. INTRODUCCIÓN AL SISTEMA TEMPERADO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
23
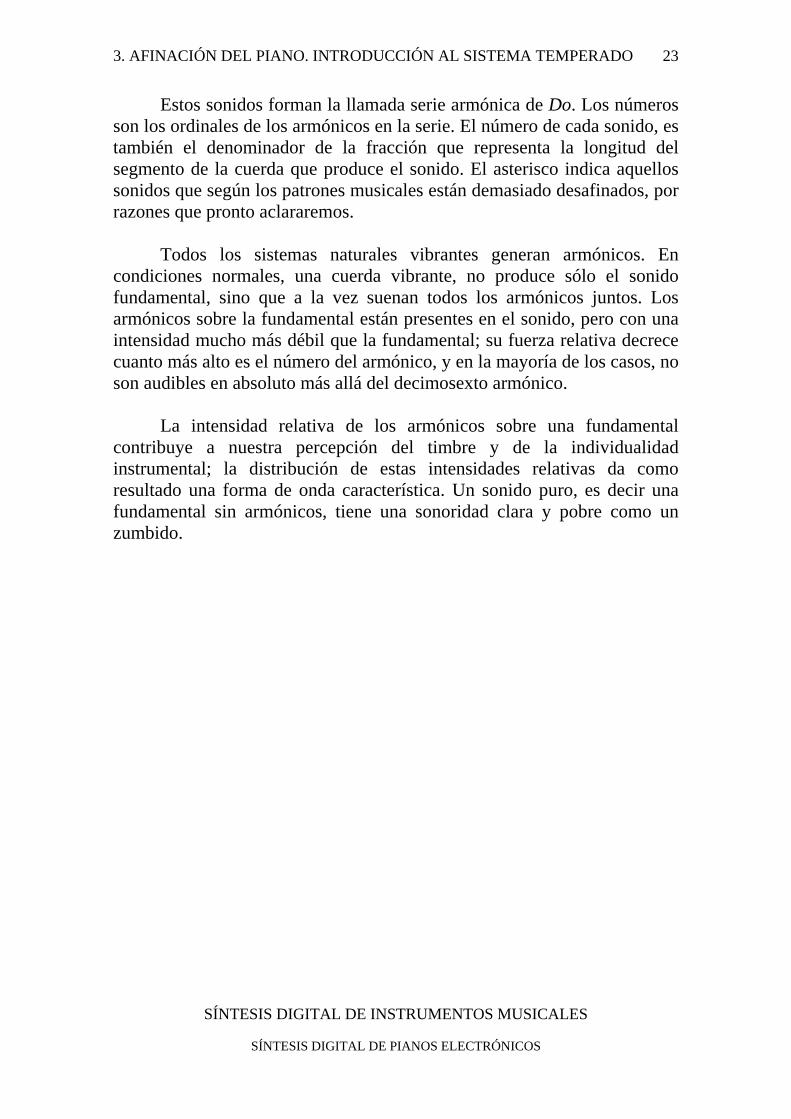
Estos sonidos forman la llamada serie armónica de Do. Los números son los ordinales de los armónicos en la serie. El número de cada sonido, es también el denominador de la fracción que representa la longitud del segmento de la cuerda que produce el sonido. El asterisco indica aquellos sonidos que según los patrones musicales están demasiado desafinados, por razones que pronto aclararemos.
Todos los sistemas naturales vibrantes generan armónicos. En condiciones normales, una cuerda vibrante, no produce sólo el sonido fundamental, sino que a la vez suenan todos los armónicos juntos. Los armónicos sobre la fundamental están presentes en el sonido, pero con una intensidad mucho más débil que la fundamental; su fuerza relativa decrece cuanto más alto es el número del armónico, y en la mayoría de los casos, no son audibles en absoluto más allá del decimosexto armónico.
La intensidad relativa de los armónicos sobre una fundamental contribuye a nuestra percepción del timbre y de la individualidad instrumental; la distribución de estas intensidades relativas da como resultado una forma de onda característica. Un sonido puro, es decir una fundamental sin armónicos, tiene una sonoridad clara y pobre como un zumbido.
3. AFINACIÓN DEL PIANO. INTRODUCCIÓN AL SISTEMA TEMPERADO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
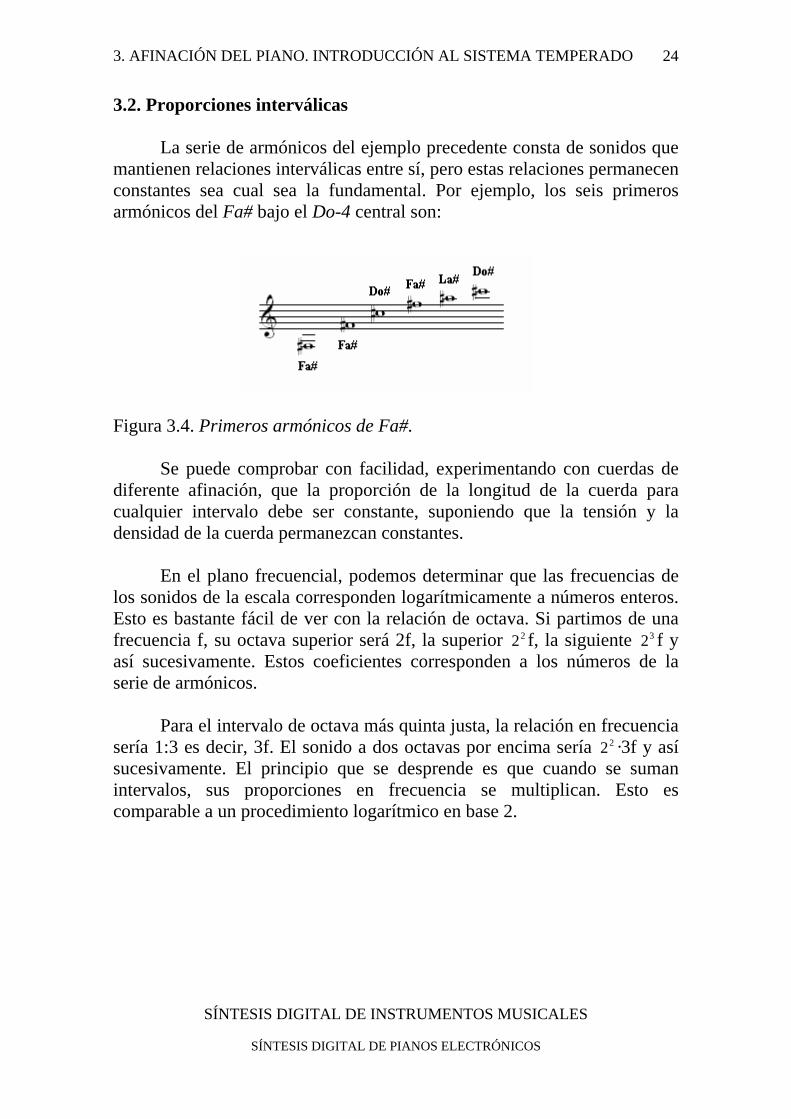
24
3.2. Proporciones interválicas La serie de armónicos del ejemplo precedente consta de sonidos que mantienen relaciones interválicas entre sí, pero estas relaciones permanecen constantes sea cual sea la fundamental. Por ejemplo, los seis primeros armónicos del Fa# bajo el Do-4 central son: Figura 3.4. Primeros armónicos de Fa#. Se puede comprobar con facilidad, experimentando con cuerdas de diferente afinación, que la proporción de la longitud de la cuerda para cualquier intervalo debe ser constante, suponiendo que la tensión y la densidad de la cuerda permanezcan constantes. En el plano frecuencial, podemos determinar que las frecuencias de los sonidos de la escala corresponden logarítmicamente a números enteros. Esto es bastante fácil de ver con la relación de octava. Si partimos de una frecuencia f, su octava superior será 2f, la superior 22 f, la siguiente 32 f y así sucesivamente. Estos coeficientes corresponden a los números de la serie de armónicos.
Para el intervalo de octava más quinta justa, la relación en frecuencia sería 1:3 es decir, 3f. El sonido a dos octavas por encima sería 22 ·3f y así sucesivamente. El principio que se desprende es que cuando se suman intervalos, sus proporciones en frecuencia se multiplican. Esto es comparable a un procedimiento logarítmico en base 2.
3. AFINACIÓN DEL PIANO. INTRODUCCIÓN AL SISTEMA TEMPERADO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
25
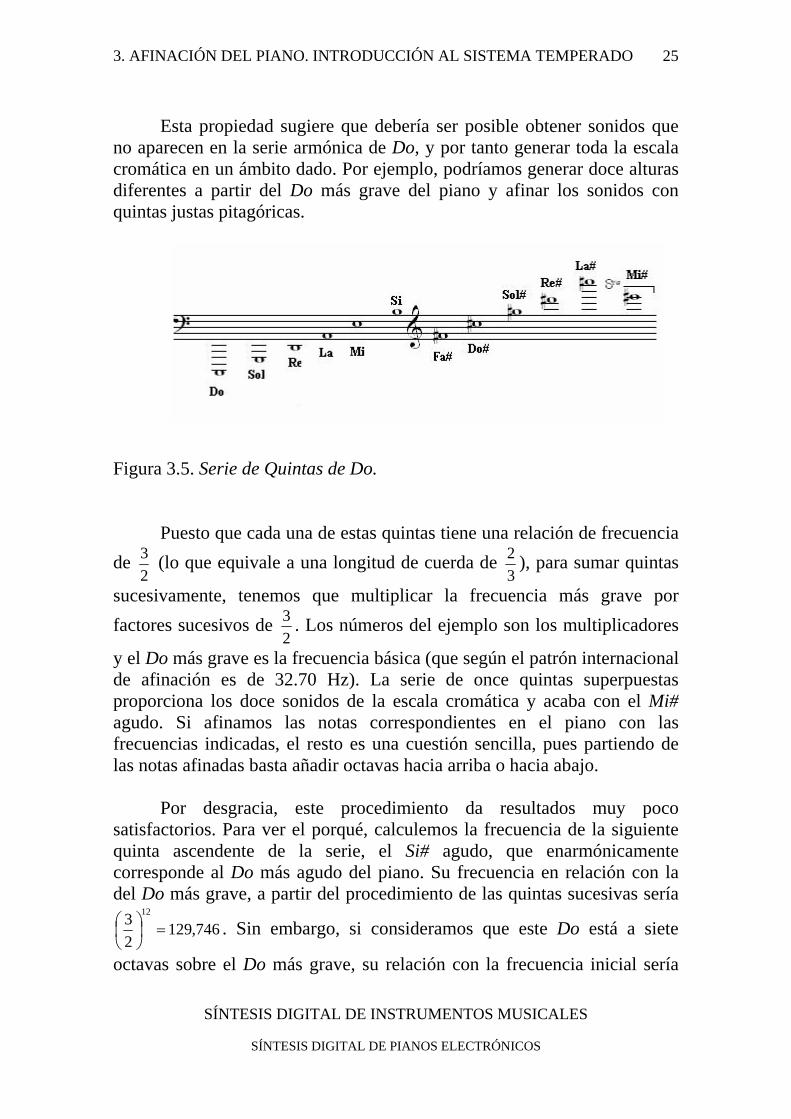
Esta propiedad sugiere que debería ser posible obtener sonidos que no aparecen en la serie armónica de Do, y por tanto generar toda la escala cromática en un ámbito dado. Por ejemplo, podríamos generar doce alturas diferentes a partir del Do más grave del piano y afinar los sonidos con quintas justas pitagóricas. Figura 3.5. Serie de Quintas de Do. Puesto que cada una de estas quintas tiene una relación de frecuencia de
23 (lo que equivale a una longitud de cuerda de
32 ), para sumar quintas
sucesivamente, tenemos que multiplicar la frecuencia más grave por factores sucesivos de
23 . Los números del ejemplo son los multiplicadores
y el Do más grave es la frecuencia básica (que según el patrón internacional de afinación es de 32.70 Hz). La serie de once quintas superpuestas proporciona los doce sonidos de la escala cromática y acaba con el Mi# agudo. Si afinamos las notas correspondientes en el piano con las frecuencias indicadas, el resto es una cuestión sencilla, pues partiendo de las notas afinadas basta añadir octavas hacia arriba o hacia abajo. Por desgracia, este procedimiento da resultados muy poco satisfactorios. Para ver el porqué, calculemos la frecuencia de la siguiente quinta ascendente de la serie, el Si# agudo, que enarmónicamente corresponde al Do más agudo del piano. Su frecuencia en relación con la del Do más grave, a partir del procedimiento de las quintas sucesivas sería
746,12923 12
=⎟⎠⎞
⎜⎝⎛ . Sin embargo, si consideramos que este Do está a siete
octavas sobre el Do más grave, su relación con la frecuencia inicial sería
3. AFINACIÓN DEL PIANO. INTRODUCCIÓN AL SISTEMA TEMPERADO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
26
12827 = . Esto significa que el Si# obtenido afinando quintas ascendentes desde el Do grave será algo más agudo que el Do obtenido afinando octavas ascendentes. El cociente entre las dos alturas, expresada como la proporción interválica 1.014 se llama coma pitagórica, que es algo más pequeña que un cuarto de tono, pero fácilmente perceptible. Una coma comparable no se podía haber evitado afinando los sonidos mediante cuartas justas, como demuestra el ejemplo siguiente.
Figura 3.6. Serie de Cuartas de Do.
La proporción de la cuarta justa 34 multiplicada doce veces, da un
resultado algo menor que el de cinco octavas mediante un factor de 1.014,
al igual que en el caso precedente: 569.3134 12
=⎟⎠⎞
⎜⎝⎛ 3225 = y el Rebb final será
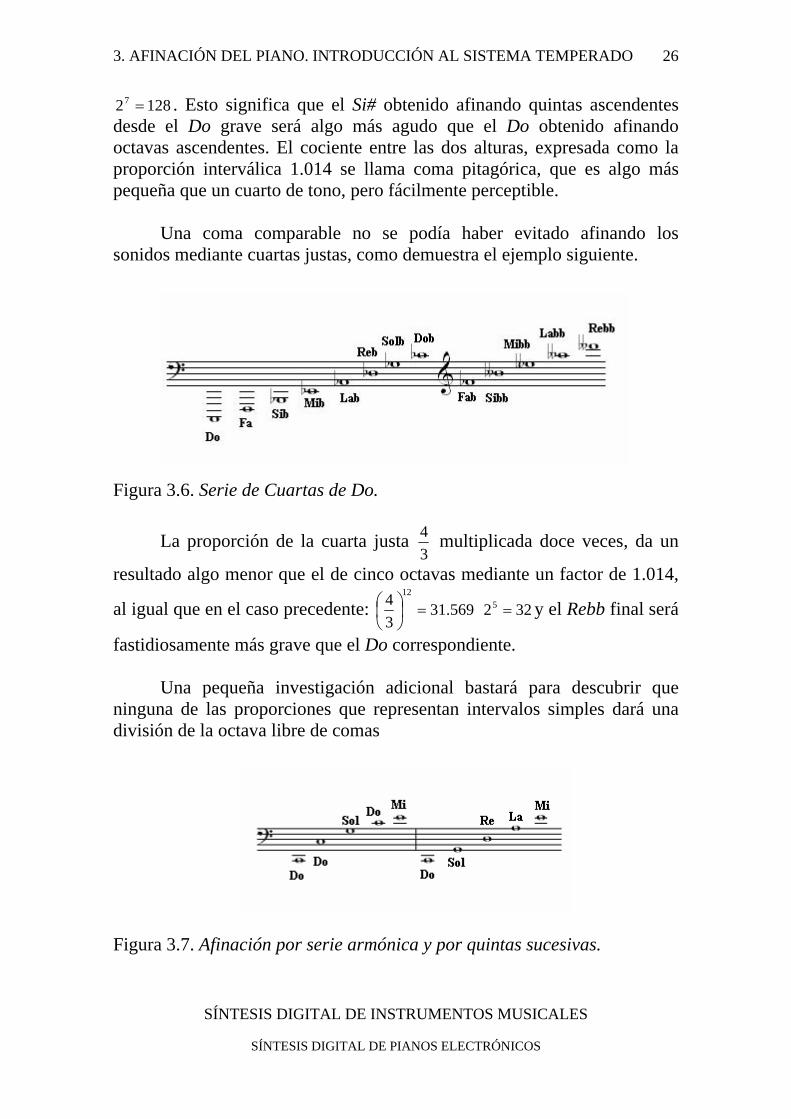
fastidiosamente más grave que el Do correspondiente. Una pequeña investigación adicional bastará para descubrir que
ninguna de las proporciones que representan intervalos simples dará una división de la octava libre de comas
Figura 3.7. Afinación por serie armónica y por quintas sucesivas.
3. AFINACIÓN DEL PIANO. INTRODUCCIÓN AL SISTEMA TEMPERADO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
27
En el primer caso el Mi se obtiene como
51 de la longitud inicial lo
que significa una frecuencia 5 veces mayor. En el segundo caso el Mi se
obtiene tomando quintas sucesivas lo que supone 0625.523 4
=⎟⎠⎞
⎜⎝⎛
El resultado práctico de cualquiera de estas afinaciones es que las
notas más agudas en la superposición de intervalos repetidos están cada vez más desafinadas. Las desigualdades derivadas de la multiplicación, inherentes a las proporciones interválicas, se pueden comprobar en la propia serie armónica.
La proporción de esta diferencia
8081 , llamada coma sintónica, revela
un hecho sorprendente. En el caso de las otras comas, era evidente que existía una diferencia de notación entre Si#, Rebb y Do, y podríamos haber supuesto que estas diferencias de notación eran el resultado de las diferencias naturales en el método empleado para generar las frecuencias. En el caso de los dos Mi del ejemplo anterior, no existe esta diferencia de notación, ambos son el mismo Mi.
Examinemos de nuevo la serie armónica. Una propiedad que
podemos advertir, es que los intervalos entre armónicos adyacentes se van haciendo cada vez más pequeños (p.ej.
910 =1.1111 es más pequeño que
89 =1.125). Pero esto no es evidente en la notación. En el ejemplo, la
distancia entre Do y Re es una segunda mayor, al igual que entre Re y Mi. Así existe una desigualdad entre la serie armónica que podemos
generar y la notación musical que hemos elegido para representarla. En otras palabras, nuestro sistema familiar de notación no puede representar en detalle las notas de la serie armónica, o al menos no todas las notas. Sabemos que la notación musical que utilizamos, aunque complicada e incómoda de aprender, es adecuada para representar la música de nuestra experiencia habitual, y quizás resulte algo alarmante descubrir que está en desacuerdo con la realidad acústica
3. AFINACIÓN DEL PIANO. INTRODUCCIÓN AL SISTEMA TEMPERADO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
28
3.3. El sistema temperado La respuesta a esta evidente contradicción la proporciona el temperamento igual, inventado a principios del siglo XVII, pero que no gozó de amplia difusión hasta la época de J.S.Bach (que contribuyó en gran medida a popularizarlo). En el temperamento igual, la octava se divide en doce intervalos de semitono exactamente iguales, lo que significa que cada semitono de la octava, allí donde esté situado, está representado por una proporción constante, a saber 05926.1212 = . La segunda mayor temperada
viene representada por 122
2 y la tercera menor 123
2 y así sucesivamente a lo largo de toda la escala cromática, de modo que la octava viene representada
por 1212
2 =2. El factor 12 2 es un número irracional y no puede expresarse como fracción de dos enteros, por tanto, el semitono temperado no puede ser el intervalo exacto entre ningún par de sonidos de la serie armónica (aunque un valor muy aproximado es
1718 )
Lo que esto significa es que de todos los intervalos de la escala
cromática temperada, sólo las octavas están afinadas con exactitud. Desde el punto de vista de la afinación “ideal”, medida por la serie armónica, esto es una desventaja general, desde el punto de vista de la interpretación y la notación musical práctica, sin embargo, la ventaja es inmensa. Las comas desaparecen y las diferencias de entonación entre los intervalos se dividen por igual a lo largo de toda la escala y son demasiado pequeñas para ser percibidas en la interpretación
En nuestro sistema de notación musical, su base diatónica permite un subsistema den notas cromáticas con signos de sostenidos y bemoles, y que el temperamento igual acomoda a la perfección esas notas cuando se emplea la equivalencia enarmónica.
Un pequeño cálculo demuestra que la proporción de la quinta justa
temperada (siete semitonos) es 127
2 =1.498, ligeramente más pequeña que 1.5, la quinta pitagórica. La tercera mayor temperada es 1.2599, más grande que la tercera mayor de la serie armónica 1.25. En definitiva, todos los intervalos excepto la octava están imperceptiblemente desafinados.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
29
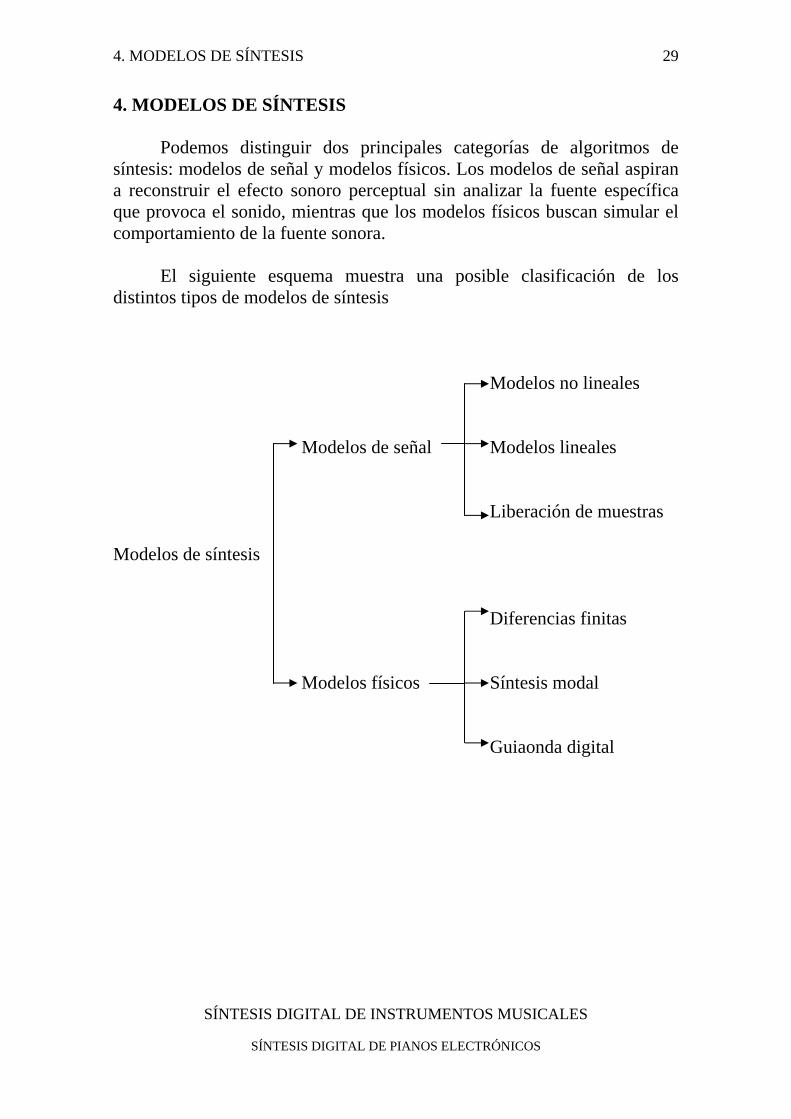
4. MODELOS DE SÍNTESIS Podemos distinguir dos principales categorías de algoritmos de síntesis: modelos de señal y modelos físicos. Los modelos de señal aspiran a reconstruir el efecto sonoro perceptual sin analizar la fuente específica que provoca el sonido, mientras que los modelos físicos buscan simular el comportamiento de la fuente sonora.
El siguiente esquema muestra una posible clasificación de los distintos tipos de modelos de síntesis Modelos no lineales
Modelos de señal Modelos lineales Liberación de muestras Modelos de síntesis Diferencias finitas
Modelos físicos Síntesis modal Guiaonda digital
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
30
4.1. Modelos de señal Los modelos de señal usan una descripción matemática del sonido. Sus ventajas son la simplicidad y la fácil implementación. El problema de estos modelos radica en el control del proceso de síntesis, sobre todo en lo que se refiere a parámetros que intervienen en el discurso musical. De modo que la mayoría de algoritmos se derivan heurísticamente y no guardan relación alguna con el proceso real de generación del sonido, con las consiguientes consecuencias negativas para la interpretación musical.
Esta es la razón por la cual es más difícil sintetizar sonidos preexistentes como los de piano, que producir sonidos abstractos con los modelos de señal, es decir, sonidos que nuestra percepción no puede relacionar con un mecanismo de producción, o imaginar una fuente para ellos. Es por ello que los modelos de señal se utilizan profusamente para la generación de nuevos sonidos en música electrónica Podemos distinguir básicamente tres tipos de modelos de señal: métodos de síntesis global o no-lineales, métodos lineales o sinusoidales y métodos de muestreo de forma de onda.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
31
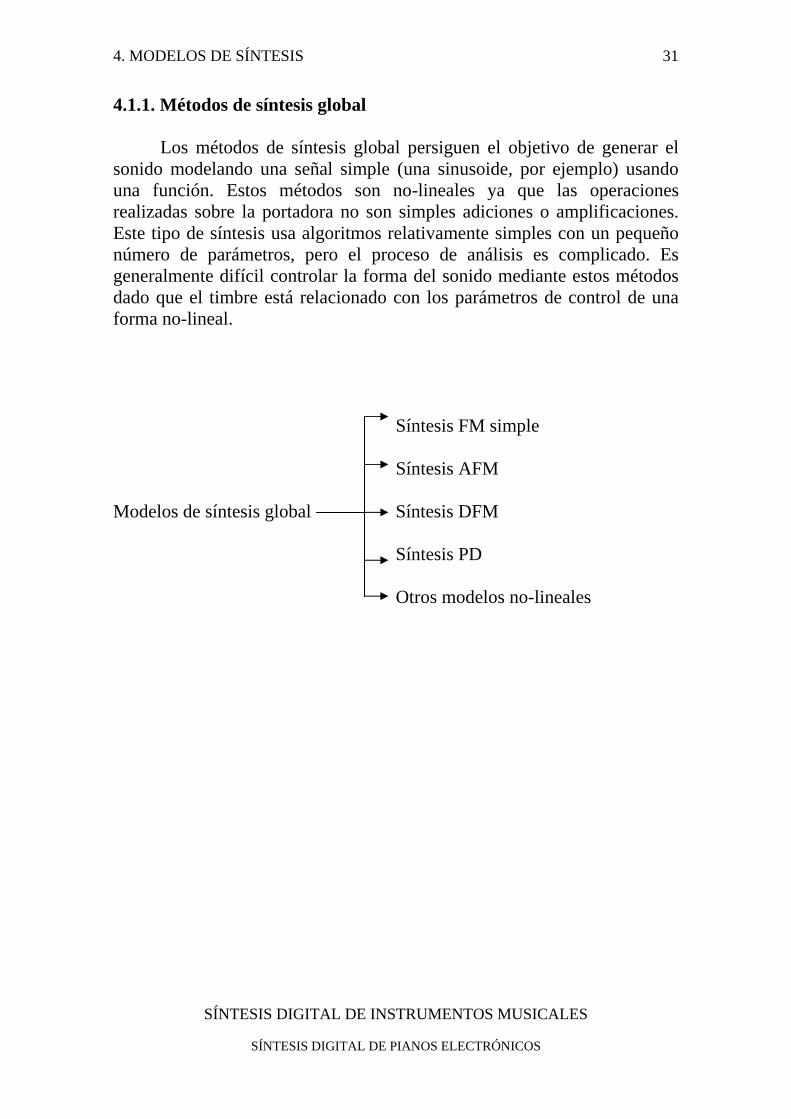
4.1.1. Métodos de síntesis global Los métodos de síntesis global persiguen el objetivo de generar el sonido modelando una señal simple (una sinusoide, por ejemplo) usando una función. Estos métodos son no-lineales ya que las operaciones realizadas sobre la portadora no son simples adiciones o amplificaciones. Este tipo de síntesis usa algoritmos relativamente simples con un pequeño número de parámetros, pero el proceso de análisis es complicado. Es generalmente difícil controlar la forma del sonido mediante estos métodos dado que el timbre está relacionado con los parámetros de control de una forma no-lineal. Síntesis FM simple Síntesis AFM Modelos de síntesis global Síntesis DFM Síntesis PD Otros modelos no-lineales
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
32
Síntesis FM El ejemplo más conocido de síntesis global, es la modulación en frecuencia o síntesis FM, expuesta originalmente por John Chowning en 1973. Este método de síntesis ha sido adaptado de la teoría de FM para radiofrecuencia a la síntesis de audio. A comienzo de los 80, la conocida marca de instrumentos musicales Yamaha, presenta un método digital de síntesis de sonido denominado Síntesis FM. El método de Yamaha estaba basado en los estudios de John Chowning sobre esta materia y concretamente en su ensayo Síntesis de espectros complejos de audio mediante Modulación en Frecuencia publicado en 1973 En realidad, no era un enfoque totalmente nuevo, pues los métodos de modulación en frecuencia, habían sido utilizados desde antaño por los ingenieros de telecomunicación en la transmisión de señal, sobre todo en aplicaciones de radio. El trabajo de Chowning era, sin embargo, la primera aplicación práctica de estos conceptos en el ámbito del modelado digital de audio. La síntesis FM está basada, como su propio nombre indica, en la modulación en frecuencia. La frecuencia de una onda determinada se modula por otra onda de distinta frecuencia. El resultado contiene elementos de ambas frecuencias junto con nuevos armónicos relacionados matemáticamente con las frecuencias originales. Se puede demostrar teóricamente que cualquier sonido, por complejo que sea, puede ser modelado mediante una serie de modulaciones en frecuencia de ondas senoidales. Análisis FM La ecuación general de la modulación FM es:
∫+=t
ofcc dmktfAty ττππ )(22cos()( ) (4.1)
Por tanto la frecuencia instantánea es: )()( tmkftf fci += (4.2)
Lo que significa que la frecuencia instantánea de la señal modulada oscila en torno a la frecuencia de portadora con una desviación máxima de
)(max tmkf f=∆ . Este parámetro recibe el nombre de desviación en frecuencia.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
33
En la síntesis FM, la señal moduladora es siempre una señal senoidal así que: )2cos()( tfAtm mm π= (4.3)
Introduciendo la moduladora dada por Ec. 4.3. en la ecuación de
análisis dada por la Ec. 4.2. tenemos que la ecuación de la síntesis FM es
))2sin(2cos(
))2sin(2cos()2cos(22cos()(
τπβπ
τππττπππ
mcc
mm
mfcc
t
omfcc
ftfA
ffA
ktfAdfktfAty
+=
+=+= ∫ (4.4)
Donde β , índice de modulación, se define como:
mff∆
=β (4.5)
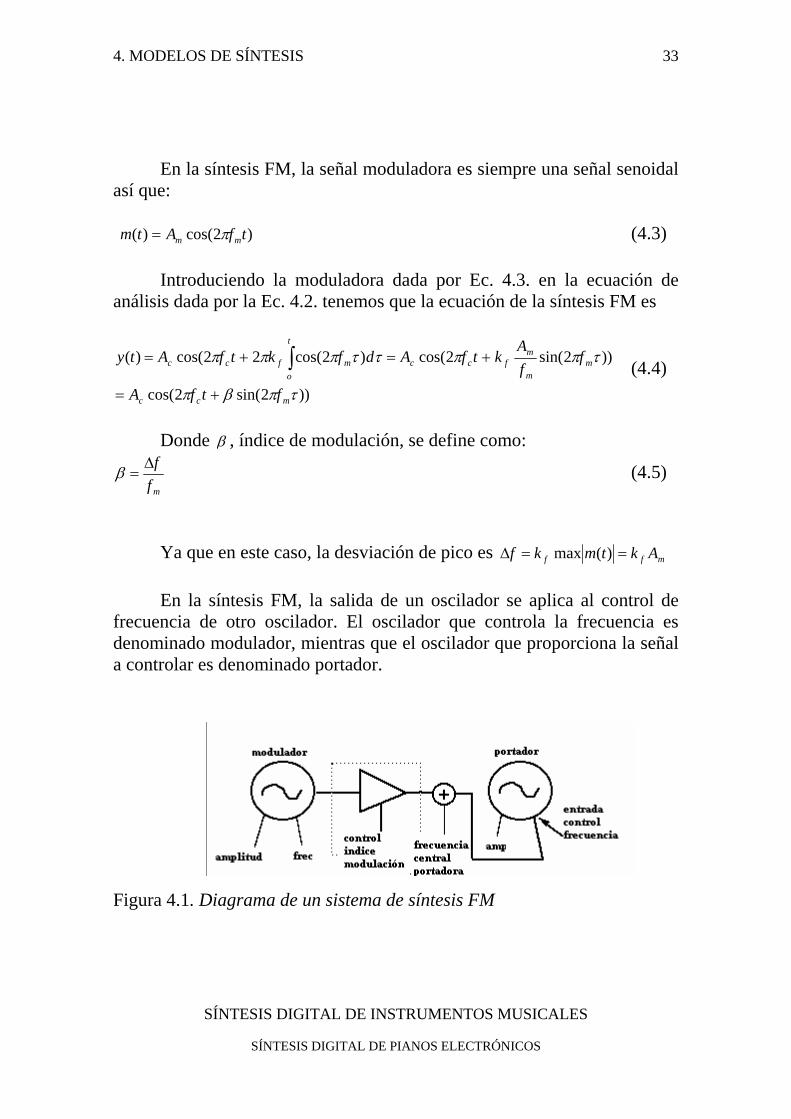
Ya que en este caso, la desviación de pico es mff Aktmkf ==∆ )(max En la síntesis FM, la salida de un oscilador se aplica al control de frecuencia de otro oscilador. El oscilador que controla la frecuencia es denominado modulador, mientras que el oscilador que proporciona la señal a controlar es denominado portador.
Figura 4.1. Diagrama de un sistema de síntesis FM

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
34
Si el modulador se sintoniza por debajo del nivel de frecuencia audible (20 Hz aprox,), se tiene modulación FM sub-audio también conocida como vibrato. La profundidad del vibrato se determina mediante la amplitud de la onda moduladora.
Si por el contrario, el modulador se sintoniza por encima de 20 Hz, frecuencias adicionales denominadas bandas laterales aparecen simétricamente alrededor de la frecuencia de portadora.
Tanto las frecuencias exactas como la amplitud relativa de las bandas laterales pueden determinarse usando tecnología digital controlando todos los parámetros con precisión. La Síntesis FM clásica, también conocida como Chowning FM, utiliza sólo ondas senoidales, resultando por tanto una modulación lineal. Puede describirse analíticamente mediante la ecuación:
))2cos()(2cos()()( cmmc tfttftAty φφπβπ +++= (4.6)
Donde A(t) es la envolvente en amplitud, cf es la frecuencia de portadora, mf es la frecuencia moduladora y mφ , cφ son constantes arbitrarias de fase. La función )(tβ , denominada envolvente del índice de modulación, determina el contenido armónico del sonido. Podemos determinar la frecuencia instantánea del sonido sin más que derivar la fase:
)2cos()(21)2sin()(
))2cos()(2(21)(
21)(
mmmmmc
cmmci
tfdt
tdtfftf
tfttfdtdt
dtdtf
φπβπ
φπβ
φφπβππ
θπ
+++−=
+++==
(4.7)
Determinar la relación precisa del índice de modulación )(tβ en el contenido armónico requeriría de un análisis más preciso, sin embargo, es posible obtener alguna información por simple inspección de la ecuación anterior. La cantidad )(tβ mf multiplica una variación sinusoidal de la frecuencia. Si )(tβ es constante, su derivada es cero, y por tanto desaparece el último término, de modo que )(tβ proporciona la máxima desviación en frecuencia con respecto a la frecuencia nominal de la portadora cf . Por
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
35
tanto si )(tβ es pequeño, se producen bajas frecuencias, por el contrario si es grande pueden producirse armónicos de nivel alto. Dado que )(tβ es una función del tiempo, el contenido armónico de la señal también puede cambiar con el tiempo.
Normalmente tanto A(t) como )(tβ suelen ser constantes sobre un gran intervalo temporal y dejan de serlo normalmente hacia el comienzo o final del sonido para tener en cuenta efectos transitorios como consecuencia del ataque de tecla.
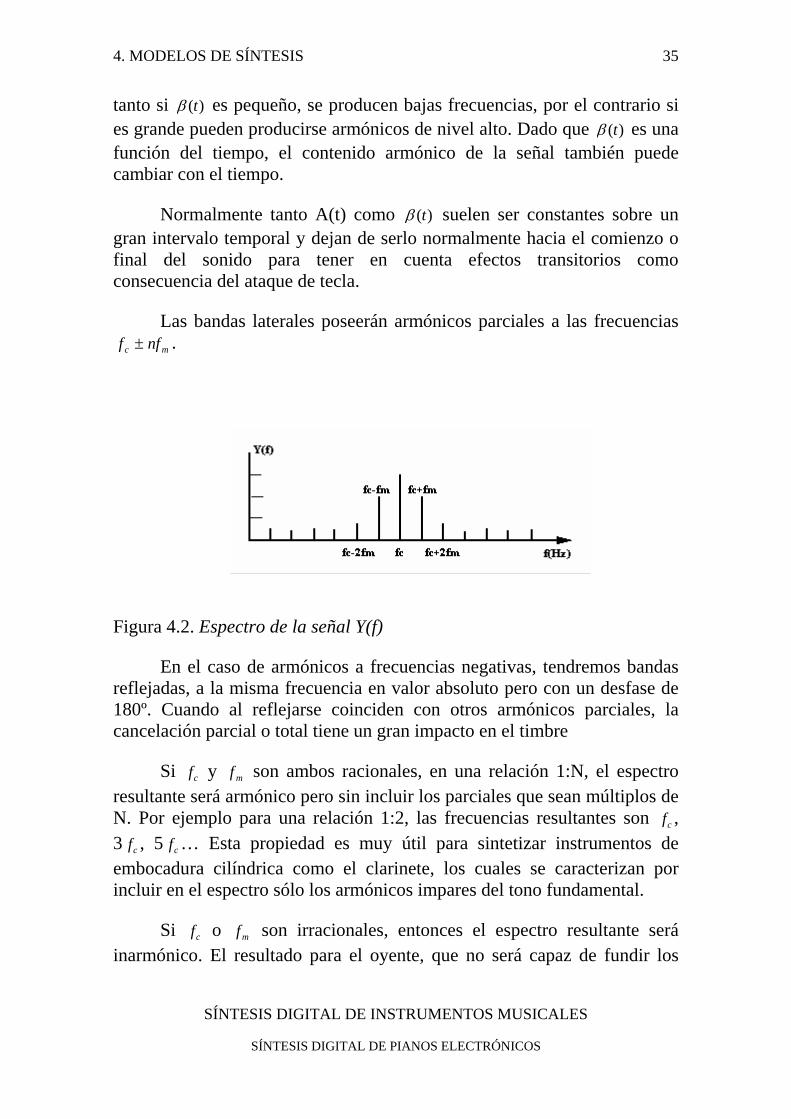
Las bandas laterales poseerán armónicos parciales a las frecuencias mc nff ± .
Figura 4.2. Espectro de la señal Y(f)
En el caso de armónicos a frecuencias negativas, tendremos bandas reflejadas, a la misma frecuencia en valor absoluto pero con un desfase de 180º. Cuando al reflejarse coinciden con otros armónicos parciales, la cancelación parcial o total tiene un gran impacto en el timbre
Si cf y mf son ambos racionales, en una relación 1:N, el espectro resultante será armónico pero sin incluir los parciales que sean múltiplos de N. Por ejemplo para una relación 1:2, las frecuencias resultantes son cf , 3 cf , 5 cf … Esta propiedad es muy útil para sintetizar instrumentos de embocadura cilíndrica como el clarinete, los cuales se caracterizan por incluir en el espectro sólo los armónicos impares del tono fundamental.
Si cf o mf son irracionales, entonces el espectro resultante será inarmónico. El resultado para el oyente, que no será capaz de fundir los

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
36
sonidos en una resultante armónica se traduce una amplia paleta de timbres brillantes y vibrantes, incluyendo tañidos de campana y similares. Estos espectros inarmónicos, tienen al menos el doble de los componentes en frecuencia de un espectro armónico, y en caso de bandas reflejadas pueden obtenerse efectos de trémolos y de chorus
Figura 4.3. Ejemplo de espectro inarmónico creado por reflexión de bandas laterales.
Para espectros armónicos, habrá usualmente implicada una frecuencia fundamental, aunque no necesariamente ha de ser la frecuencia de portadora. Para que sea así, mf debe ser mayor o igual que 2 cf , ya que de este modo, todas las frecuencias negativas reflejadas serán superiores a
cf y ésta será considerada como el tono fundamental.
No obstante, el timbre percibido por el oyente no está determinado solamente por las frecuencias presentes, sino también por sus amplitudes relativas. Las bandas superior e inferior tienen amplitudes simétricas. La amplitud de cada parcial se calcula en base al índice de modulación )(tβ que puede suponerse constante sobre el intervalo de tiempo sobre el que se calcule el espectro ββ =)(t .
La amplitud de cada parcial mc nff ± es )(βnJ donde nJ es la función de Bessel de orden n, de modo que el espectro puede describirse analíticamente por:
∑∞
−∞=
+=n
mcnc nffJAfY )()()( δβ (4.8)
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
37
Lo que significa que en el dominio del tiempo, la ecuación de síntesis puede escribirse como:
∑∞
−∞=
+=n
mcnc tnJAty ))sin(()()( ωωβ (4.9)
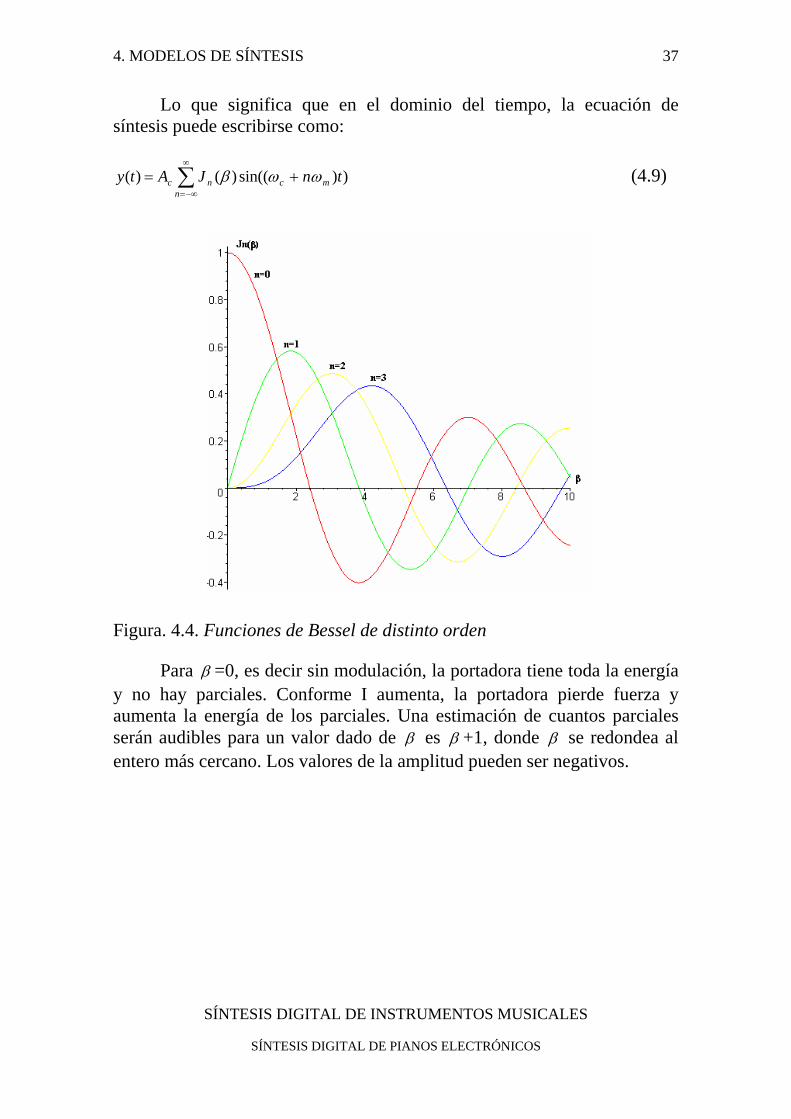
Figura. 4.4. Funciones de Bessel de distinto orden
Para β =0, es decir sin modulación, la portadora tiene toda la energía y no hay parciales. Conforme I aumenta, la portadora pierde fuerza y aumenta la energía de los parciales. Una estimación de cuantos parciales serán audibles para un valor dado de β es β +1, donde β se redondea al entero más cercano. Los valores de la amplitud pueden ser negativos.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
38
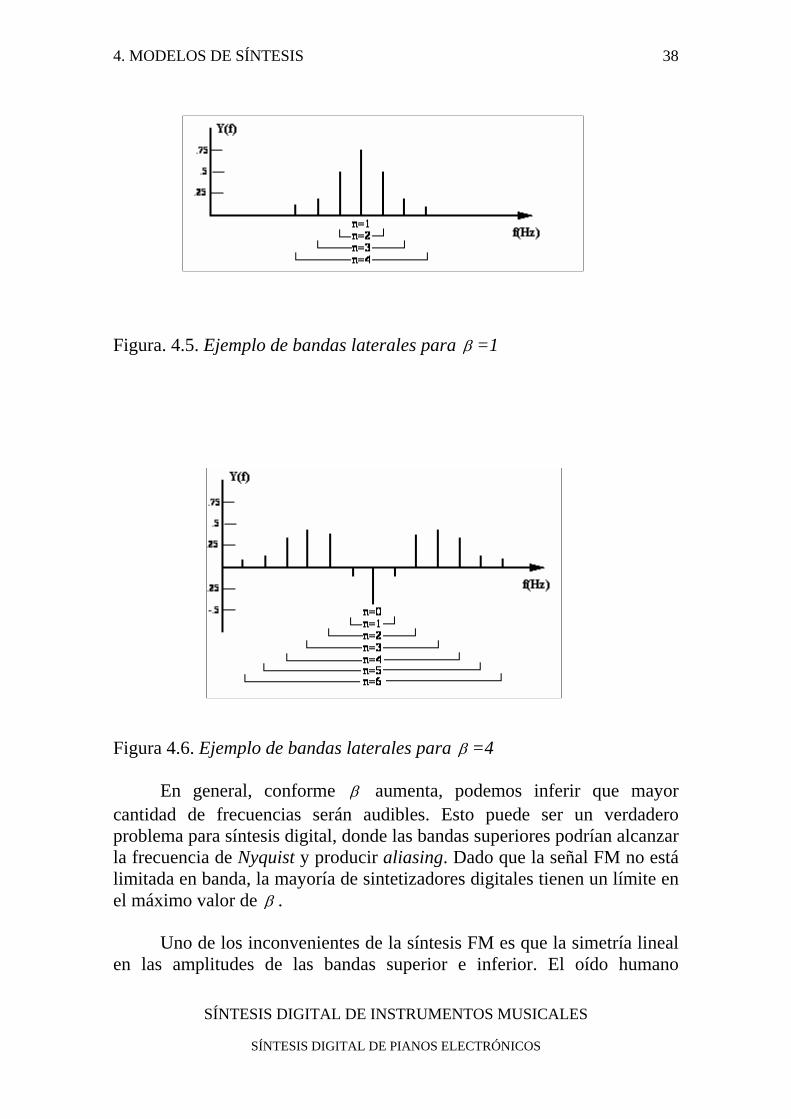
Figura. 4.5. Ejemplo de bandas laterales para β =1
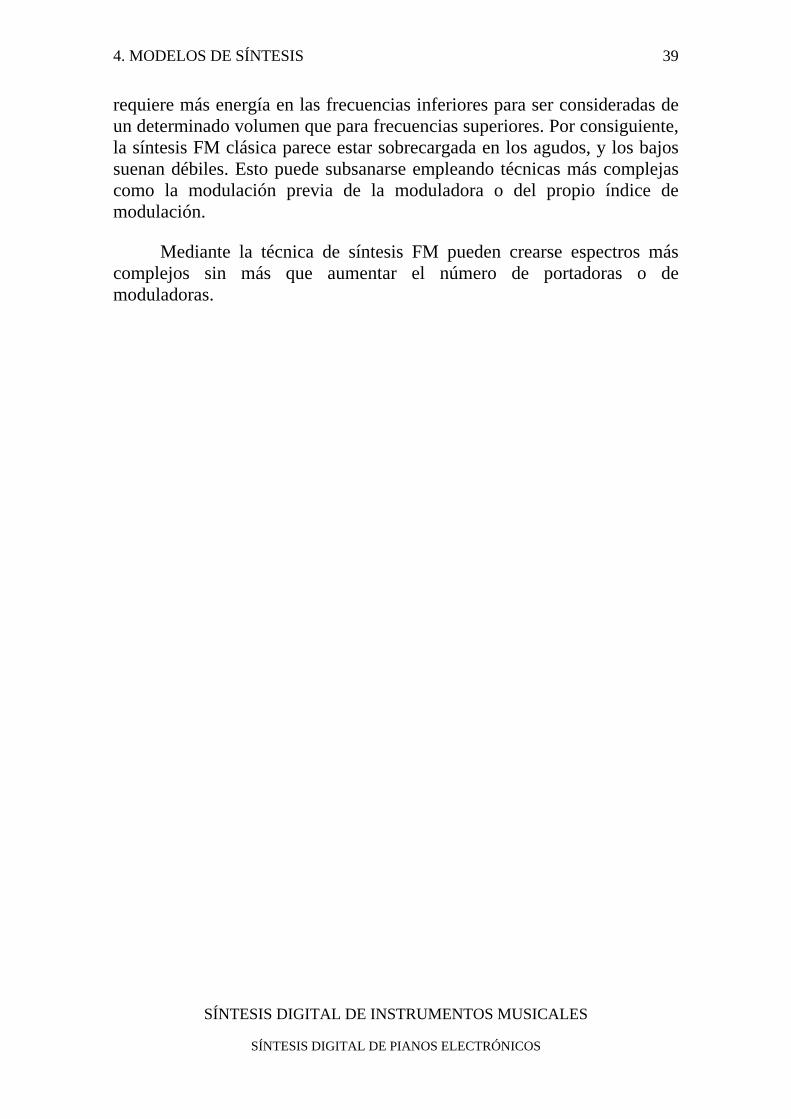
Figura 4.6. Ejemplo de bandas laterales para β =4
En general, conforme β aumenta, podemos inferir que mayor cantidad de frecuencias serán audibles. Esto puede ser un verdadero problema para síntesis digital, donde las bandas superiores podrían alcanzar la frecuencia de Nyquist y producir aliasing. Dado que la señal FM no está limitada en banda, la mayoría de sintetizadores digitales tienen un límite en el máximo valor de β .
Uno de los inconvenientes de la síntesis FM es que la simetría lineal en las amplitudes de las bandas superior e inferior. El oído humano
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
39
requiere más energía en las frecuencias inferiores para ser consideradas de un determinado volumen que para frecuencias superiores. Por consiguiente, la síntesis FM clásica parece estar sobrecargada en los agudos, y los bajos suenan débiles. Esto puede subsanarse empleando técnicas más complejas como la modulación previa de la moduladora o del propio índice de modulación.
Mediante la técnica de síntesis FM pueden crearse espectros más complejos sin más que aumentar el número de portadoras o de moduladoras.

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
40
Síntesis AFM
Como se dijo anteriormente, la simetría entre las bandas inferior y superior de la síntesis FM clásica supone una limitación al grado de control de la forma de la amplitud espectral deseada para la forma sintetizada. Mediante una sencilla modificación en la ecuación de la síntesis FM clásica podemos introducir cierta asimetría. Tomando de la ecuación Ec. 4.9.
∑∞
−∞=
+=+=n
mccmcc tntJnAttAty )sin()())sin(sin()( ωωβωβω
Introducimos el un factor multiplicativo nr , sobre la amplitud de los armónicos del espectro.
∑∞
−∞=
+n
mcnn tntJr )sin()( ωωβ (4.10)
En la siguiente figura pueden verse las diferentes formas del espectro para valores de r de 0.4 a 4.
Figura 4.7. Envolventes del espectro AFM para distintos valores de r
Puede verse, que conforme r aumenta, la envolvente del espectro se desplaza hacia la derecha, lo que explica la ventaja de la síntesis AFM sobre la FM convencional. El pico de la envolvente coincide con la frecuencia de portadora cuando r alcanza el valor 1, ya que en este caso AFM coincide con FM.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
41
Dos Portadoras
Además del espectro general, otra característica muy importante del sonido es la presencia de formantes. Los formantes describen ciertas regiones del espectro donde tienen lugar resonancias fuertes y pueden localizarse como picos en la envolvente del espectro.
En la síntesis FM, los picos en la envolvente espectral pueden controlarse usando un oscilador de portadora adicional. En el caso de un único oscilador, el espectro generado estará centrado en torno a una frecuencia formante. Cuando se añaden dos señales, sus espectros pueden combinarse. Si el mismo oscilador se usa para modular ambas portadoras (aunque usando distinto índice de modulación), y las frecuencia del segundo oscilador es múltiplo entero de la del primero, el espectro de ambas señales puede combinarse de modo que solapen las componentes creándose un pico formante en la frecuencia del segundo oscilador.
En la figura, ambas portadoras son moduladas por el mismo oscilador con frecuencia mf . El índice de modulación para la primera y segunda portadora es 1β 2β . El valor 2β es normalmente menor que 1β , de modo que el cociente 2β / 1β es pequeño y el espectro no se extiende más allá de la región del formante
La frecuencia de la segunda portadora 2cf se elige de manera que sea un armónico, es decir, múltiplo entero de la frecuencia fundamental of (que normalmente coincidirá con la frecuencia de la primer portadora 1cf ) y que además esté lo más cercana posible a la deseada frecuencia formante ff .
oo
foc ff
fnff )5.0int(2 +== (4.11)

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
42
De esta manera aseguramos que la frecuencia de la segunda portadora está armónicamente relacionada con la de la primera. Si of varía, la frecuencia de la segunda portadora permanecerá lo más cercana posible a la deseada frecuencia formante ff y a la vez seguirá siendo un múltiplo entero de of .
Figura 4.8. Síntesis FM con dos portadoras para la obtención de formantes.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
43
Dos Moduladoras
Así como puede aumentarse el número de portadoras, también puede hacerlo el de moduladoras. Para conseguir una mayor variedad espectral, la forma de onda moduladora puede consistir en la suma de varias sinusoides
Si la frecuencia de portadora es cf y las frecuencias moduladoras son 1mf y 2mf , el espectro resultante contendrá componentes de frecuencia en
los valores 21 mmc kfiff ±± , con i,k enteros. Además existen múltiples combinaciones de las parejas i,k que proporcionan la misma frecuencia, de modo que la amplitud final será la resultante de todas las contribuciones a esa frecuencia.
Los índices de modulación serán en general distintos para cada componente, 2β 1β . La amplitud de la banda lateral kiA , viene dada por el producto de las funciones Bessel:
)()( 21, ββ kiki JJA = (4.12)
Análogamente al caso de una moduladora simple, las frecuencias negativas se reflejan con un cambio de signo en la amplitud que puede contribuir a la cancelación total o parcial de ciertas componentes.
La DFM (Double Frequency Modulation) proporciona un método alternativo de síntesis digital, en el que las frecuencias armónicas pueden ser generadas a partir de dos frecuencias dadas y ofrece otra alternativa para generar espectros asimétricos con menor coste computacional que AFM.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
44
Síntesis FM para sonidos de piano.
Para sintetizar un sonido de piano, es necesario crear una señal con armónicos que no sean múltiplos enteros de la frecuencia fundamental. El índice de inarmonicidad del n-ésimo parcial del sonido de una nota del piano nf , puede expresarse como, a partir de la ecuación Ec. 2.3. como
2
0
1 Bnnff
In n +== (4.13)
Donde B suele ser del orden de una centésima de semitono.
Usando una serie de términos moduladores, cada uno con un índice de modulación relativamente pequeño, de manera que cada uno solo genere una frecuencia en cada banda lateral pero en una frecuencia de modulación que no esté armónicamente relacionada con la fundamental, podemos sintetizar un sonido de piano.
Síntesis PD
Este modelo de síntesis fue usado ampliamente en los teclados Casio que aparecieron a mediados de los 80 y superaba algunas limitaciones de los sintetizadores Yamaha que usaban su modelo patentado de síntesis FM
La síntesis PD es en muchos aspectos similar a la síntesis FM, pero las operaciones fundamentales realizadas en la forma de onda no son las mismas. En concreto, la síntesis PD provoca una distorsión en la fase de la onda portadora de forma periódica. En la síntesis FM, la frecuencia de la onda portadora está modulada por otro oscilador. En el caso de PD, la forma de onda no está modulada por otro oscilador, sino distorsionada por algún tipo de algoritmo de forma de onda arbitraria como pueden ser ondas cuadradas, triangulares, ruido blanco, etc.

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
45
Otros métodos no lineales Otro método basado en la distorsión no lineal de una señal de entrada es el método Le Brun. Este consiste básicamente en implementar un mapeado de la señal sinusoidal x(n) con una función arbitraria de distorsión w. La función w es almacenada una tabla y es indexada con x(n) para producir y(n) en el mismo rango [-1,1]. Los armónicos producidos pueden ser controlados usando polinomios de Chebyshev como funciones de distorsión. De hecho, utilizando polinomios de Chebyshev de orden n, se obtienen sinusoides puras de frecuencia n. Por consiguiente, usando una combinación lineal de polinomios de Chebyshev como funciones de distorsión, pueden controlarse exactamente las amplitudes de los distintos armónicos. Además la señal puede limitarse en banda evitando así el aliasing.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
46
4.1.2. Métodos lineales Los modelos lineales como la síntesis aditiva o sustractiva tienen como objetivo construir la señal usando representación en frecuencia, buscando emular el proceso de la percepción humana que analiza las señales de audio de acuerdo a sus contenidos espectrales. Una amplia gama de sonidos pueden producirse usando estas técnicas, pero generalmente, un gran número de parámetros es necesario para la descripción del sonido. La linealidad de dichos modelos les confiere una gran versatilidad aunque puede suponer un inconveniente para modelar sonidos de naturaleza fuertemente no-lineal. Síntesis aditiva Síntesis granular
Modelos lineales Síntesis SMS Síntesis sustractiva
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
47
Síntesis aditiva La síntesis aditiva es una de las más simples e intuitivas de estas técnicas espectrales. Se basa en el Teorema de Fourier según el cual cualquier forma de onda periódica puede ser modelada como suma de sinusoides con distintas amplitudes y frecuencias. La síntesis aditiva fue de las primeras técnicas de síntesis utilizadas en la elaboración de música sintética. Uno de los primeros trabajos sobre el tema fue publicado por el profesor James A. Moorer en la revista Computer Music Journal. Este método persigue la construcción un tono complejo mediante la suma de sonidos elementales, generalmente sinusoides moduladas en amplitud y en frecuencia. Puede interpretarse como un método para modelar el espectro variante en el tiempo de un tono mediante un conjunto de líneas discretas en el dominio de la frecuencia. Se necesitan tres funciones de control para cada oscilador sinusoidal: amplitud, frecuencia y fase de cada componente. En muchos casos, la fase puede dejarse a un lado y la señal de salida puede representarse como:
[ ]∑−
=
=1
0)(2sin)()(
M
kkk nFnAny π (4.14)
Donde y es la señal de salida, M es el número de osciladores sinusoidales, )(nAk y )(nFk son la amplitud variante en el tiempo del k-ésimo parcial y su frecuencia respectivamente. Para sonidos periódicos o cuasi-periódicos, estos componentes tienen frecuencias que son múltiplos de una frecuencia fundamental. Mediante métodos de análisis de Fourier, se puede descomponer el sonido a modelar en una suma de señales sinusoidales. Las amplitudes y frecuencias necesarias pueden determinarse usando la STFT de la señal original (Transformada de Fourier de corto plazo) Una ventaja de este método es la flexibilidad y el potencial para modificaciones dinámicas del sonido. Pero su inconveniente es el alto número de parámetros de control. Con objeto de evitar eso, se ha desarrollado una técnica de síntesis aditiva de grupos. En esta técnica, los parciales son agrupados en torno a una frecuencia común y a una envolvente de amplitud. Estos parciales agrupados se combinan para formar tablas de onda.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
48
Síntesis granular Otra técnica de síntesis lineal es la síntesis granular. Se basa en sintetizar sonidos a partir de pequeños elementos de señal en el dominio del tiempo llamados sonidos atómicos o granos. Estos granos pueden tener una duración comprendida entre un milisegundo y más de cien. Los métodos de síntesis granular pueden ser clasificados en función de cómo los granos son obtenidos.
En la síntesis granular asíncrona (AGS), los granos son dispersados
sobre una región en el dominio de la frecuencia denominada nube. Los granos pueden tener formas de onda similares o diferentes. La forma de onda puede ser una sinusoide enventanada, una señal muestreada o bien obtenida mediante un modelo físico.
En la síntesis granular síncrona de Pitch (PSGS), los granos se
obtienen de la STFT de la señal original. La longitud de la ventana rectangular usada en la STFT es el periodo del sonido sintetizado, y cada grano corresponde por tanto a un periodo de la señal.
Esta técnica de síntesis se usa para conseguir efectos interesantes y sonidos derivados pero no para sintetizar los propios sonidos de piano.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
49
Síntesis por modelado de espectro La síntesis por modelado de espectro o SMS, es un método que busca sintetizar el sonido añadiendo separadamente los componentes deterministas y estocásticos. El componente determinista del sonido se obtiene calculando en primer lugar la STFT de cada porción enventanada de señal. A partir del espectro complejo obtenido por la STFT, los picos prominentes y sus trayectorias se extraen mediante algoritmos complejos. El componente estocástico se calcula restando la parte determinista a la señal original en el dominio de la frecuencia. Cualquier modelo de síntesis sonora da por supuestas ciertas características de la forma sonora a sintetizar o del mecanismo de generación del sonido. El sonido producido por instrumentos musicales puede ser modelado por la suma de un conjunto de sinusoides a las que se añade un ruido residual. La componente sinusoidal o determinística, corresponde normalmente a los principales modos de vibración del sistema. La componente de ruido representa la energía producida por el mecanismo de excitación que no se transforma en vibraciones estacionarias o bien otro tipo de componentes que no son de naturaleza sinusoidal y se modelan como aleatorias por comodidad. En el caso de sonidos de piano, la componente sinusoidal es el resultado de los principales modos de vibración de la cuerda mientras que el ruido caracterizaría la percusión violenta del martillo contra la cuerda, así como otros comportamientos no-lineales del sistema resonante.
La componente determinista queda descrita por una suma de componentes cuasi-sinusoidales (es decir, sinusoides cuya amplitud y frecuencia varían de forma suave con respecto a su frecuencia nominal). Cada sinusoide modela un componente de banda estrecha del sonido original y queda descrito por una función de la amplitud y de la frecuencia.
La componente estocástica, es decir, el ruido, queda descrito completamente por su densidad espectral de potencia que proporciona la potencia de señal frente a la frecuencia. Para las señales estocásticas, no es necesario tener en cuentas detalles de fase instantánea o valores exactos de la magnitud.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
50
Por consiguiente el modelo completo del sistema puede expresarse de forma analítica como:
[ ] )()(cos)()(1
tettAts n
N
nn +=∑
=
θ (4.15)
Donde )(tAn y )(tnθ son la amplitud instantánea y la fase de la n-ésima sinuoside respectivamente, y )(te es la componente de ruido. El modelo asume que las sinusoides son armónicos parciales estables del sonido y que cada uno tiene un cambio suave de amplitud y frecuencia. La fase instantánea puede derivarse a partir de la frecuencia instantánea como
∫=t
nn dt0
)()( ττωθ (4.16)
Donde )(τωn es la frecuencia instantánea de la n-ésima sinusoide. Para la señal )(te , ésta puede ser descrita como un ruido blanco filtrado.
∫=t
duthte0
)(),()( τττ (4.17)
Donde )(τu es el ruido blanco y ),( τth es la respuesta de un filtro variante en tiempo. La integral representa la convolución de un ruido blanco con un filtro con una frecuencia de corte determinada. Este modelo tiene problemas con sonidos que incluyen parciales ruidosos, como los producidos por el vibrato, donde la frecuencia nominal no puede determinarse con exactitud. Debido a estos problemas, la separación entre componente determinista y estocástica es normalmente complicada, y la implementación de estos procesos debe ser lo suficientemente flexible para incluir sonidos con estos problemas
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
51
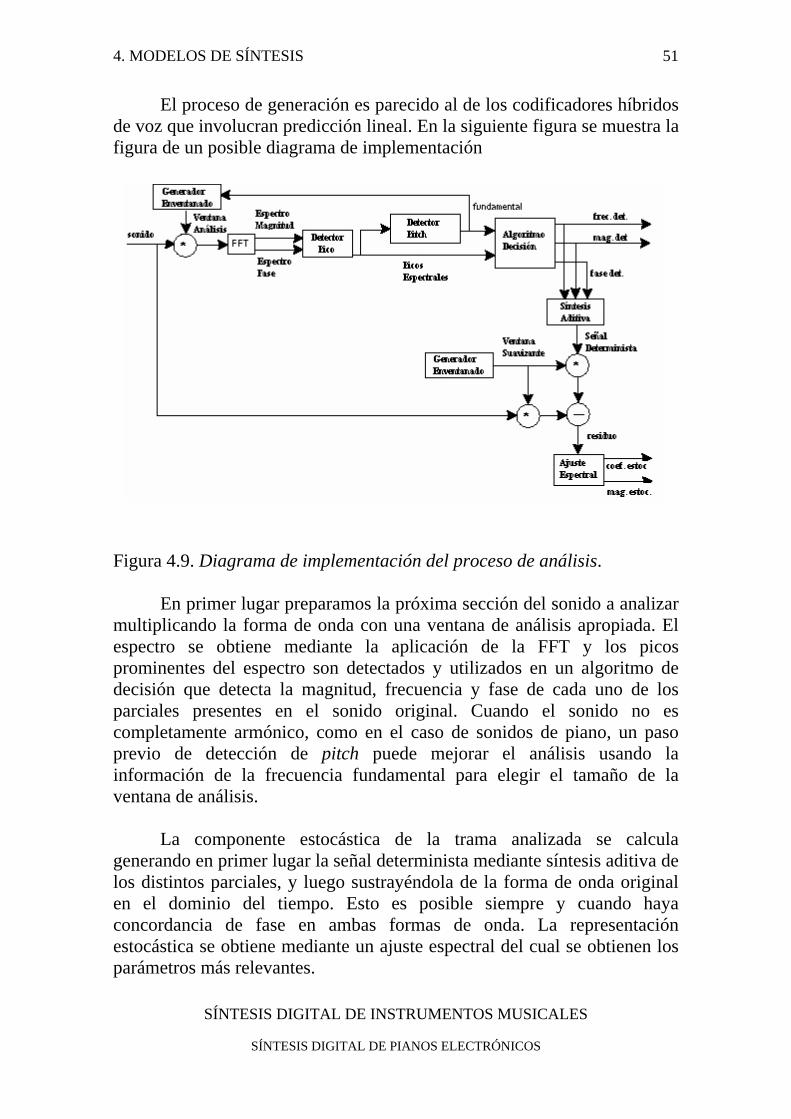
El proceso de generación es parecido al de los codificadores híbridos de voz que involucran predicción lineal. En la siguiente figura se muestra la figura de un posible diagrama de implementación
Figura 4.9. Diagrama de implementación del proceso de análisis. En primer lugar preparamos la próxima sección del sonido a analizar multiplicando la forma de onda con una ventana de análisis apropiada. El espectro se obtiene mediante la aplicación de la FFT y los picos prominentes del espectro son detectados y utilizados en un algoritmo de decisión que detecta la magnitud, frecuencia y fase de cada uno de los parciales presentes en el sonido original. Cuando el sonido no es completamente armónico, como en el caso de sonidos de piano, un paso previo de detección de pitch puede mejorar el análisis usando la información de la frecuencia fundamental para elegir el tamaño de la ventana de análisis. La componente estocástica de la trama analizada se calcula generando en primer lugar la señal determinista mediante síntesis aditiva de los distintos parciales, y luego sustrayéndola de la forma de onda original en el dominio del tiempo. Esto es posible siempre y cuando haya concordancia de fase en ambas formas de onda. La representación estocástica se obtiene mediante un ajuste espectral del cual se obtienen los parámetros más relevantes.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
52
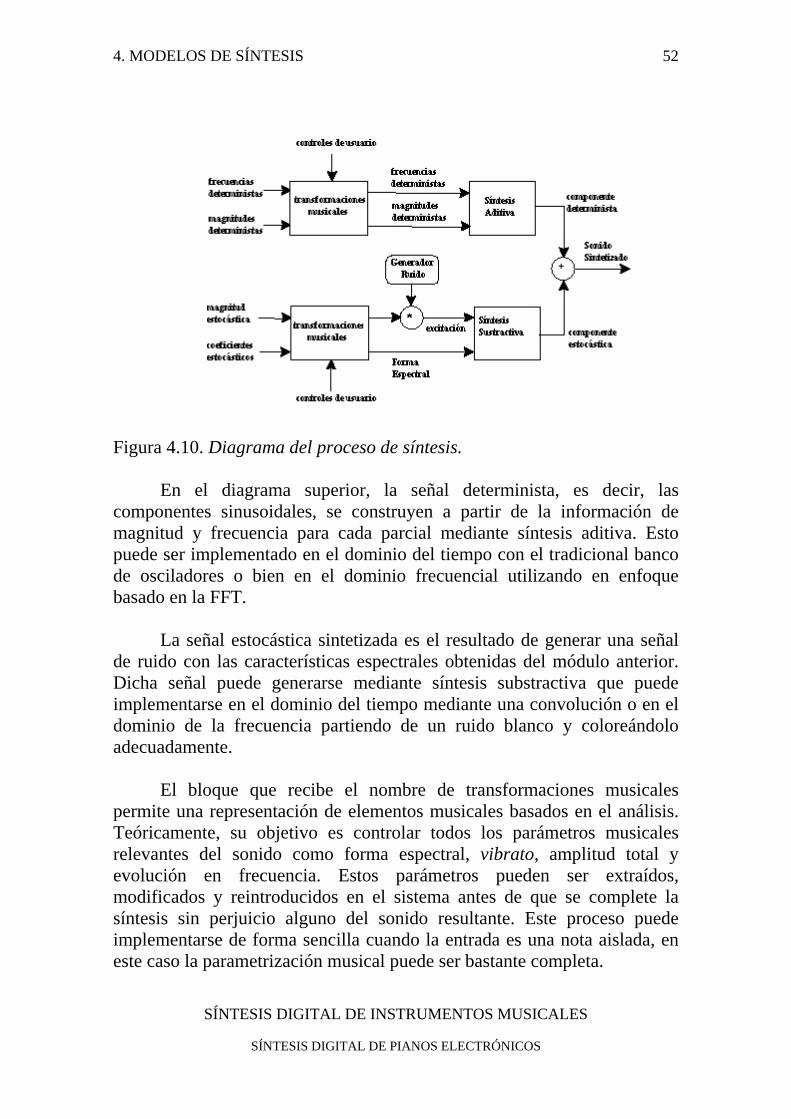
Figura 4.10. Diagrama del proceso de síntesis. En el diagrama superior, la señal determinista, es decir, las componentes sinusoidales, se construyen a partir de la información de magnitud y frecuencia para cada parcial mediante síntesis aditiva. Esto puede ser implementado en el dominio del tiempo con el tradicional banco de osciladores o bien en el dominio frecuencial utilizando en enfoque basado en la FFT. La señal estocástica sintetizada es el resultado de generar una señal de ruido con las características espectrales obtenidas del módulo anterior. Dicha señal puede generarse mediante síntesis substractiva que puede implementarse en el dominio del tiempo mediante una convolución o en el dominio de la frecuencia partiendo de un ruido blanco y coloreándolo adecuadamente. El bloque que recibe el nombre de transformaciones musicales permite una representación de elementos musicales basados en el análisis. Teóricamente, su objetivo es controlar todos los parámetros musicales relevantes del sonido como forma espectral, vibrato, amplitud total y evolución en frecuencia. Estos parámetros pueden ser extraídos, modificados y reintroducidos en el sistema antes de que se complete la síntesis sin perjuicio alguno del sonido resultante. Este proceso puede implementarse de forma sencilla cuando la entrada es una nota aislada, en este caso la parametrización musical puede ser bastante completa.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
53
Síntesis sustractiva En la síntesis sustractiva, el proceso es el opuesto al utilizado en la síntesis aditiva. El sonido se construye, eliminando componentes indeseados a partir de un sonido inicial complejo como puede ser un ruido. Este método esta íntimamente relacionado con la teoría de filtrado digital. En su forma más básica, la síntesis sustractiva es un proceso muy simple en el que intervienen tres elementos: generador, filtro y amplificador. La fuente o generador puede ser cualquier tipo de sonido pero suele usarse un ruido de banda ancha. El filtro colorea el ruido adecuadamente y el amplificador controla el volumen del sonido. El proceso completo puede emular la característica espectral de un instrumento. La síntesis fuente-resonador es un ejemplo de este tipo de síntesis. Una excitación de banda ancha es filtrada usando filtros resonantes. Esta aproximación corresponde a lo que sucede en muchos sistemas físicos, asumiendo que no existe realimentación del resonador a la fuente. Para modelar sonidos percusivos como el del piano, se suelen hacer dos aproximaciones: primero, el cuerpo vibrante genera un sonido compuesto de sinusoides con decaimiento exponencial, segundo, independencia entre la fuente y los valores de frecuencia. Desde un punto de vista físico, las dos partes del modelo pueden interpretarse de la siguiente manera: Las cuerdas, que corresponden a la estructura vibrante son representadas por el filtro resonante, y el martillo que es el excitador físico, es representado por una señal de corta duración.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
54
4.1.3. Métodos de liberación de muestras Los métodos de liberación de muestras son de los más utilizados en pianos digitales comerciales. Consiste en reproducir un sonido que ha sido previamente grabado. Estos métodos son muy precisos a la hora de reproducir un sonido específico pero no es capaz de reproducir cambios en las condiciones de ejecución pianística. Los pianos que implementan este tipo de síntesis, almacenan tonos separados del instrumento en memoria y los reproducen cuando la tecla es presionada. Varias muestras de una misma nota son necesarias para simular la modificación del timbre con la dinámica. Dado que este método requiere una gran cantidad de datos, solo unos pocos segundos son grabados. Tras el ataque, la forma de onda se reconstruye mediante repetición de la sección estacionaria del tono. Por consiguiente la amplitud y la evolución del timbre deben simularse mediante un generador de envolvente y un filtro variante con el tiempo. Con objeto de minimizar el espacio en memoria, solo se almacenan notas cada 3 ó 4 semitonos. El resto de tonos se obtienen mediante desplazamiento del pitch o pitch shifting. El inconveniente de estos métodos es que el sonido inmediato al ataque de la tecla suena bastante artificial. Además las técnicas de compresión utilizadas para almacenar tal cantidad de datos tienden a degradar la calidad del sonido percibido. No obstante, muchos pianos de gama alta utilizan esta técnica. El concepto es sencillo y la implementación del algoritmo relativamente simple. El problema es que mediante esta técnica se sintetizan las notas separadamente, lo que significa que fenómenos físicos como la transferencia de energía entre cuerdas, o la acción del doble escape a la hora de ejecutar notas repetidas no son tenidos en cuenta. Este método ha sido implementado con éxito durante mucho tiempo, ya que el pianista no puede actuar sobre el sonido una vez que la tecla es golpeada, lo cual favorece bastante a esta filosofía de síntesis. Sin embargo, dada su naturaleza estática, es incapaz de recrear esa interacción tan profunda entre pianista e instrumento que crea su propio tono personal, más allá de la simple recreación de un sonido invariable y carente de vida.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
55
Síntesis PCM o Wavetable
En la síntesis PCM o Wavetable (tabla de onda), los sonidos muestreados se almacenan directamente tras un cuantificador PCM sin ningún tipo de codificación, por lo que su tamaño en memoria es elevado. De hecho, los sistemas que implementan síntesis PCM tienen como parámetro más crítico el espacio en memoria y por tanto, todos los esfuerzos de desarrollo en esta síntesis han tenido como objeto último optimizar dicho espacio. No obstante, con el abaratamiento de los dispositivos de memoria y las nuevas tecnologías, cada vez más reducidas, de almacenamiento de memoria, éste suele ser un problema cada vez menos importante, por lo que la síntesis PCM se ha impuesto sobre las demás en la mayoría de modelos comerciales.
Repetición en Bucle y Generación de Envolvente
Una de las técnicas usadas en sintetizadores basados en tabla de onda para ahorrar espacio en memoria, es el looping o repetición mediante bucle de pequeños fragmentos muestreados del sonido de un piano.
Para el piano, el sonido puede ser modelado, como ya se discutió en el análisis del mecanismo del piano, mediante dos secciones principales. Un régimen transitorio inmediatamente posterior al ataque de la tecla y un régimen permanente con un tono sostenido de menor volumen. En la sección transitoria o parte inicial del sonido, la amplitud y las características espectrales del sonido pueden cambiar muy rápidamente. En la sección permanente, por el contrario, las características del sonido poseen menos cambios de forma dinámica.
La figura muestra una forma de onda del sonido de un piano con las secciones transitoria y permanente indicadas. En este ejemplo las características espectrales de la forma de onda permanecen constantes a lo largo de la sección permanente, mientras que la amplitud decrece a una tasa aproximadamente constante. Este ejemplo no es realista, pues en pianos auténticos, tanto las características espectrales como la amplitud continúan cambiando durante toda la emisión del sonido.
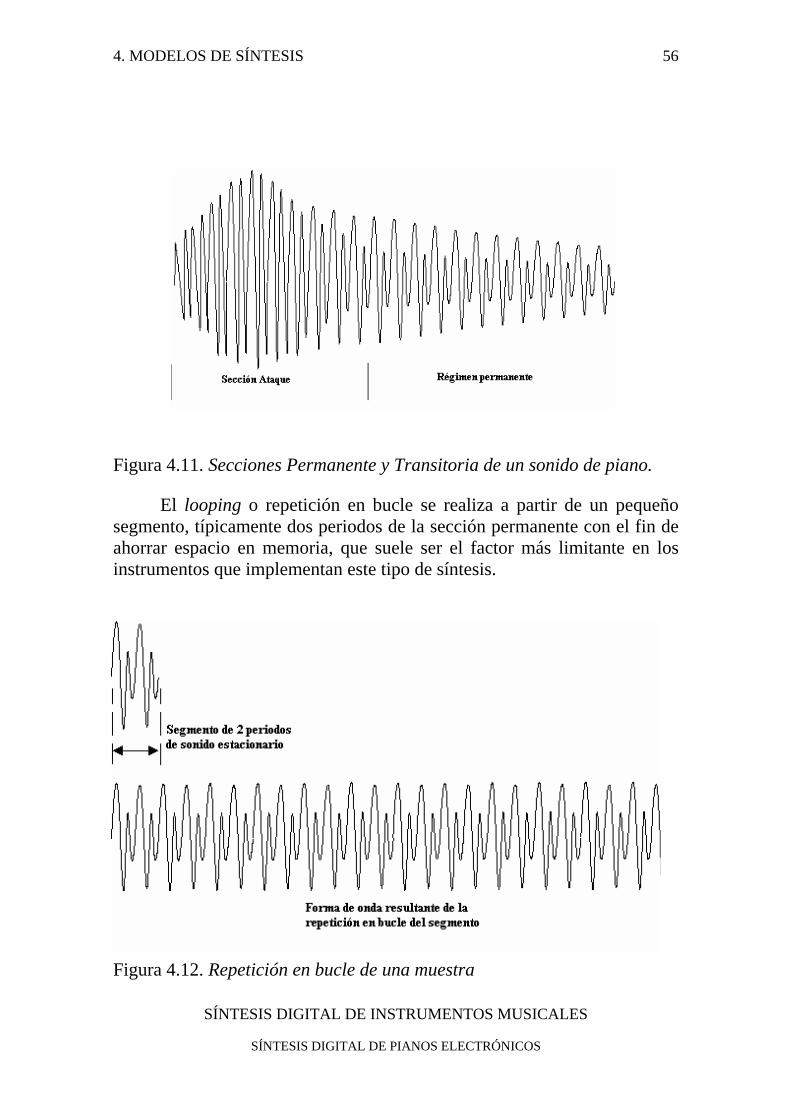
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
56
Figura 4.11. Secciones Permanente y Transitoria de un sonido de piano.
El looping o repetición en bucle se realiza a partir de un pequeño segmento, típicamente dos periodos de la sección permanente con el fin de ahorrar espacio en memoria, que suele ser el factor más limitante en los instrumentos que implementan este tipo de síntesis.
Figura 4.12. Repetición en bucle de una muestra
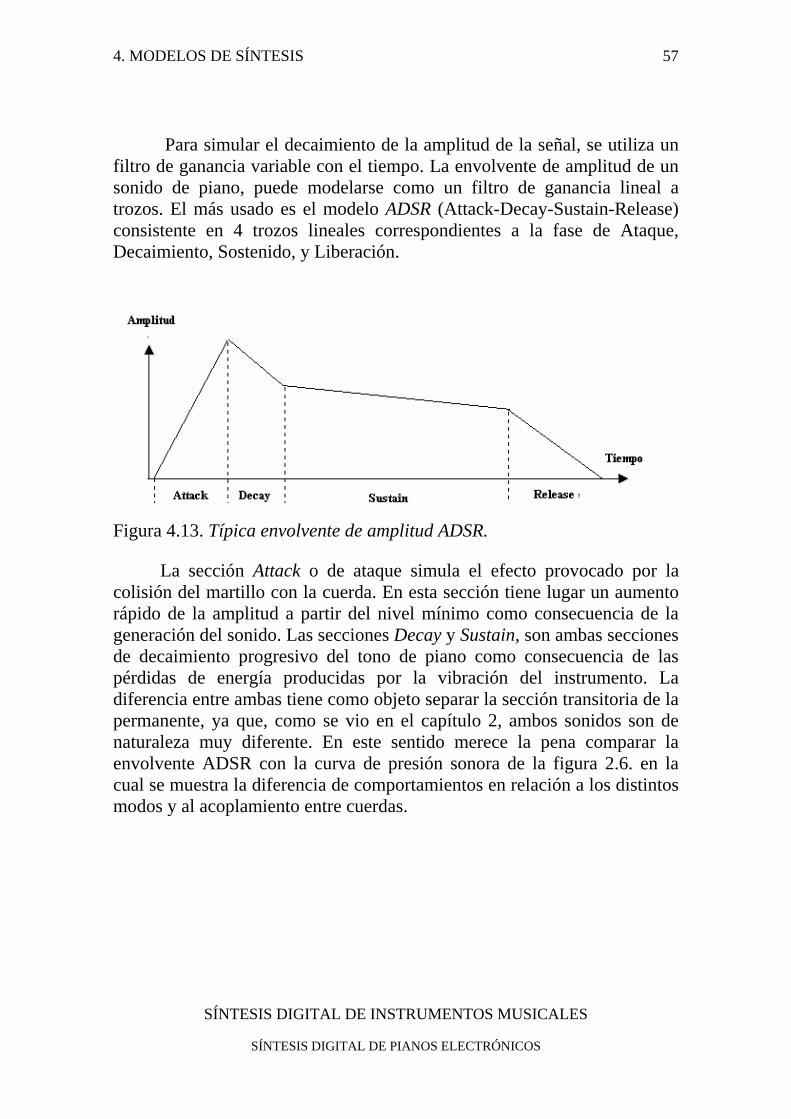
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
57
Para simular el decaimiento de la amplitud de la señal, se utiliza un filtro de ganancia variable con el tiempo. La envolvente de amplitud de un sonido de piano, puede modelarse como un filtro de ganancia lineal a trozos. El más usado es el modelo ADSR (Attack-Decay-Sustain-Release) consistente en 4 trozos lineales correspondientes a la fase de Ataque, Decaimiento, Sostenido, y Liberación.
Figura 4.13. Típica envolvente de amplitud ADSR.
La sección Attack o de ataque simula el efecto provocado por la colisión del martillo con la cuerda. En esta sección tiene lugar un aumento rápido de la amplitud a partir del nivel mínimo como consecuencia de la generación del sonido. Las secciones Decay y Sustain, son ambas secciones de decaimiento progresivo del tono de piano como consecuencia de las pérdidas de energía producidas por la vibración del instrumento. La diferencia entre ambas tiene como objeto separar la sección transitoria de la permanente, ya que, como se vio en el capítulo 2, ambos sonidos son de naturaleza muy diferente. En este sentido merece la pena comparar la envolvente ADSR con la curva de presión sonora de la figura 2.6. en la cual se muestra la diferencia de comportamientos en relación a los distintos modos y al acoplamiento entre cuerdas.

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
58
Figura 2.6. Presión sonora frente al tiempo para un tono de piano.
La sección Release, o de liberación, implementa el efecto de retirar el dedo de la tecla o bien de bajar los apagadores, en caso de que el pedal derecho estuviera accionado.
Figura 4.14. Envolvente ADSR aplicada a la forma de onda resultante.
Un sistema típico de síntesis por tabla de onda almacena datos muestreados de la sección de ataque y de la sección permanente del sonido de piano. El sonido inicial es reproducido solamente una vez, mientras que el sonido permanente se repite mediante un bucle hasta que termina la nota. La longitud de las secciones de Ataque y Decaimiento de la envolvente
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
59
generalmente son fijas para un instrumento concreto, mientras que las otras suelen ser configurables por el usuario
Longitud de Bucle
La longitud del bucle, medida en número de muestras debe ser igual a un número entero de periodos del tono fundamental del sonido reproducido. En caso contrario se obtiene un indeseable desplazamiento del pitch. En la práctica la longitud del segmento de bucle para un piano suele ser de varios periodos con respecto a la frecuencia fundamental del tono generado.
Edición de Muestras y Procesamiento
Existe un cierto número de procesos de edición y procesamiento de las muestras para preparar los sonidos muestreados previo a su utilización en un sistema de síntesis por tabla de onda.
En primer lugar, es necesario alinear los extremos del segmento de muestra a repetir en bucle para que sean compatibles. Si la amplitud y la pendiente de la forma de onda al comienzo del segmento no se corresponde con la del final, aparecerá un ruido indeseable o glitch durante la reproducción del bucle.
En segundo lugar, es necesario un procesamiento adicional para comprimir el rango dinámico del sonido con el fin de mejorar la relación señal/ruido. Esta relación está determinada por el tamaño de palabra (número de bits por muestra) y por la amplitud de la señal digitalizada. Los sonidos de piano alcanzan su amplitud de pico muy rápidamente y de forma inmediata comienza a decaer lentamente. Como es sabido, la sensibilidad del oído se ajusta dinámicamente al nivel de señal, así que incluso para un tamaño de palabra pequeño, el nivel de ruido se enmascara cuando el nivel de señal está cercano a la máxima amplitud. Sin embargo, conforme el nivel de señal decae, el oído se vuelve más sensible y el nivel de ruido parecerá incrementarse. Usar un gran tamaño de palabra de memoria, reduce el ruido de cuantización pero aumenta también el espacio a utilizar en memoria.
Por tanto, se utilizan técnicas de compresión para mejorar la relación señal/ruido de cuantización que consisten en reducir el rango dinámico de las muestras de sonido almacenadas en memoria. Los datos muestreados son descomprimidos durante la reproducción para restaurar el rango
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
60
dinámico de la señal. Esto permite el uso de muestras con una longitud menor de palabra de memoria. Existen diferentes técnicas de compresión que pueden ser usadas para comprimir el rango dinámico de una señal.
Además existe un cierto efecto de compresión inherente en la técnica del looping descrita anteriormente, ya que si el procesador y el convertidor A/D usados en la reproducción tienen un rango dinámico mayor que el disponible en memoria, la aplicación de una envolvente de decaimiento tendrá un efecto similar a la descompresión mencionada en el párrafo previo.
Desplazamiento del Pitch (Pitch Shifting)
Con el fin de optimizar el espacio en memoria disponible, los sistemas de síntesis por tabla de onda utilizan técnicas de desplazamiento o transposición del pitch, o frecuencia fundamental del tono, para generar diferentes notas a partir de un único sonido muestreado. Por ejemplo, si una célula de memoria contiene el sonido muestreado del Do central de un piano, esta misma muestra puede usarse para generar Do# o Re, es decir sonidos situados uno o dos semitonos sobre la nota muestreada.
El desplazamiento de pitch se consigue accediendo a la muestra almacenada a diferentes tasas. Por ejemplo, si se reproducen las muestras de una en una, secuencialmente obtendremos el pitch original, mientras que si se reproducen de dos en dos, el pitch resultante tendrá una frecuencia doble que la original y por tanto el sonido percibido será una octava superior.
En el ejemplo anterior, el puntero que accede a memoria se incrementa solo un número entero de muestras (de una en una, o de dos en dos). Esto permite solamente un número limitado de desplazamientos en memoria. En un caso más general, el puntero a memoria podría constar de una parte entera y una parte fraccional y el incremento podría ser un número fraccionario de muestras. El puntero a memoria se denomina a menudo acumulador de fase, y el valor del incremento, incremento de fase. Por ejemplo, si el valor del incremento de fase fuera de 0.5, el tono decrementaría una octava. Para un incremento de fase de 12 2 (1.05946), la frecuencia del tono se incrementaría en un semitono.
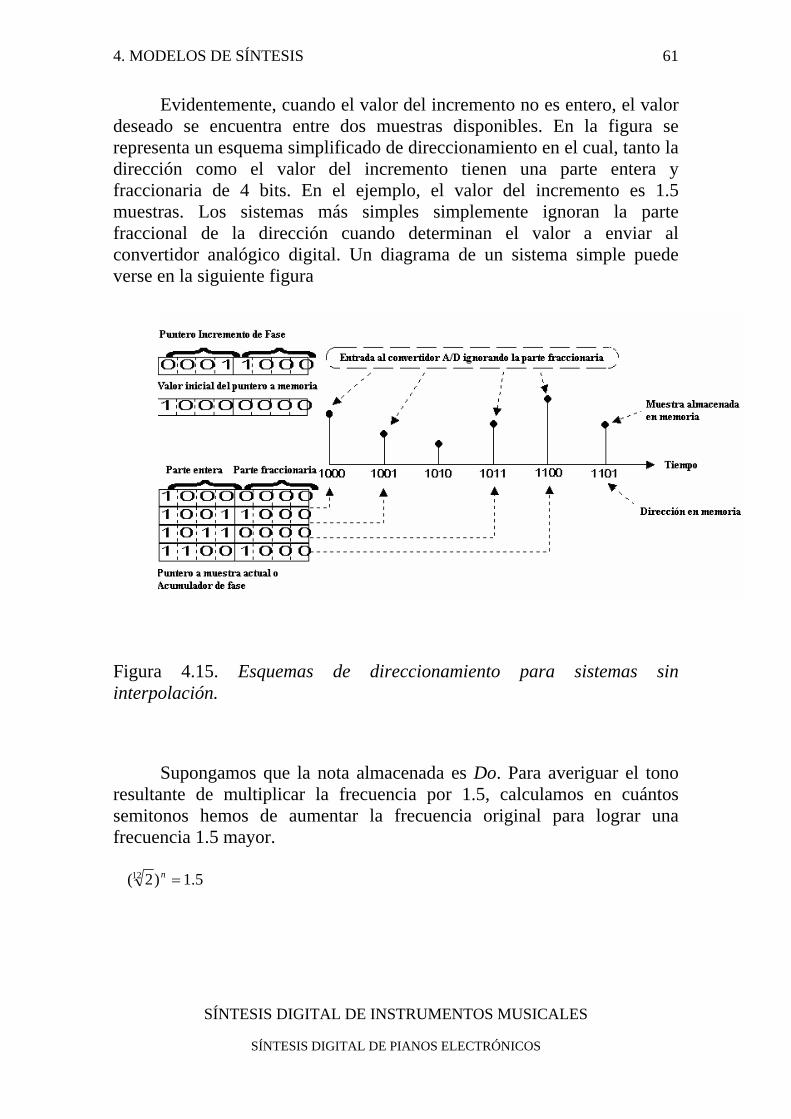
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
61
Evidentemente, cuando el valor del incremento no es entero, el valor deseado se encuentra entre dos muestras disponibles. En la figura se representa un esquema simplificado de direccionamiento en el cual, tanto la dirección como el valor del incremento tienen una parte entera y fraccionaria de 4 bits. En el ejemplo, el valor del incremento es 1.5 muestras. Los sistemas más simples simplemente ignoran la parte fraccional de la dirección cuando determinan el valor a enviar al convertidor analógico digital. Un diagrama de un sistema simple puede verse en la siguiente figura
Figura 4.15. Esquemas de direccionamiento para sistemas sin interpolación.
Supongamos que la nota almacenada es Do. Para averiguar el tono resultante de multiplicar la frecuencia por 1.5, calculamos en cuántos semitonos hemos de aumentar la frecuencia original para lograr una frecuencia 1.5 mayor.
5.1)2(12 =n
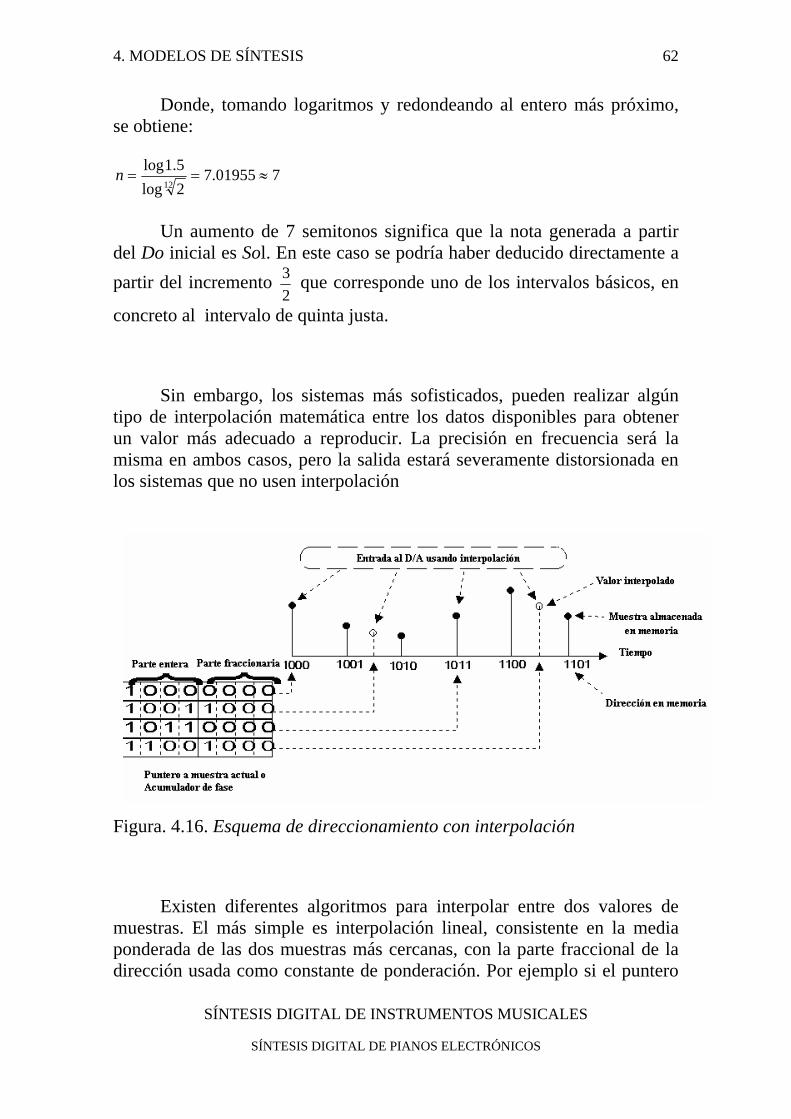
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
62
Donde, tomando logaritmos y redondeando al entero más próximo, se obtiene:
701955.72log5.1log
12≈==n
Un aumento de 7 semitonos significa que la nota generada a partir del Do inicial es Sol. En este caso se podría haber deducido directamente a partir del incremento
23 que corresponde uno de los intervalos básicos, en
concreto al intervalo de quinta justa.
Sin embargo, los sistemas más sofisticados, pueden realizar algún tipo de interpolación matemática entre los datos disponibles para obtener un valor más adecuado a reproducir. La precisión en frecuencia será la misma en ambos casos, pero la salida estará severamente distorsionada en los sistemas que no usen interpolación
Figura. 4.16. Esquema de direccionamiento con interpolación
Existen diferentes algoritmos para interpolar entre dos valores de muestras. El más simple es interpolación lineal, consistente en la media ponderada de las dos muestras más cercanas, con la parte fraccional de la dirección usada como constante de ponderación. Por ejemplo si el puntero
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
63
de dirección indica una dirección de )( Kn + , donde n es la parte entera y K la fraccional, entonces el valor interpolado puede ser calculado como:
)1()()()1()( ++−=+ nsKnsKkns (4.18)
Donde s(n) es la muestra n-ésima de la señal. Aunque pueden utilizarse técnicas más sofisticadas de interpolación para reducir la distorsión, éstas suelen ser costosas computacionalmente y no suelen utilizarse más que en instrumentos de alta precisión.
Otra técnica utilizada para suavizar el desplazamiento del pitch es el sobremuestreo (Oversampling). De esta forma, los datos interpolados durante la reproducción estarán más cercanos al valor real, debido al incremento en el número de puntos para representar la forma de onda. Evidentemente, esto tiene un alto coste en términos de requerimientos en memoria.
En muchos casos, la mejor aproximación consiste en utilizar interpolación lineal combinada con varios grados de sobremuestreo en los casos que sean necesarios. La interpolación lineal proporciona una precisión razonable en la mayoría de los casos, mientras que para los tonos que necesiten mayor precisión, como por ejemplo en los agudos, se emplea sobremuestreo. El efecto combinado de ambos puede producir excelentes resultados
Divisiones (Splits)
Cuando el pitch de un sonido muestreado se modifica mediante desplazamiento, el timbre del sonido también se ve afectado. El efecto pasa desapercibido para pequeños cambios en el pitch, del orden de unos pocos semitonos. Pero para un gran desplazamiento del pitch, la distorsión es considerable. Así que para obtener un sonido natural de piano, y cubrir el rango completo del instrumento, es necesario tomar un número diferente de muestras, de forma que cada una cubra un rango de notas. La implementación resultante se conoce a menudo como instrumento multimuestreado. Esta técnica puede concebirse como un teclado dividido en distintos campos, con una nota representativa para cada campo. Cada uno de estos campos se conoce como división o split
El término división en velocidad o Velocity Splits hace referencia al uso de diferentes muestras para diferentes velocidades de nota (p, mf, f), de forma que una muestra se utiliza para una nota particular cuando es tocada
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
64
suavemente (p), mientras que una muestra diferente se utiliza para la misma nota si es tocada a gran dinámica (f). Esta técnica no suele utilizarse en pianos de gama baja debido al coste en memoria, aunque se incluye en casi todos los de la gama media y alta.
Ruido de Aliasing
Las técnicas de interpolación para desplazamiento del pitch descritas anteriormente también pueden resultar en la introducción de ruido de aliasing en el sonido del piano. La generación de ruido de aliasing, y no solo la distorsión del timbre, puede también limitar la cantidad de desplazamiento de pitch que puede aplicarse a un sonido muestreado. Los sonidos ricos en contenido armónico a alta frecuencia (como los sonidos en forte) tendrán generalmente más problemas con ruido de aliasing. Un filtrado paso-bajo aplicado tras la interpolación puede ayudar a eliminar el indeseado efecto del ruido de aliasing así como las técnicas de sobremuestreo.
Multicapa (Layering )
El término Layering hace referencia a una técnica en la cual se utilizan múltiples sonidos para cada nota. Se utiliza en pianos de gama alta para generar sonidos de gran riqueza.
Filtrado digital
Como se mencionó previamente, el filtrado paso-bajo puede ser utilizado para eliminar ruido generado durante el proceso de desplazamiento de pitch. Existen también otras aplicaciones del filtrado digital en la generación del timbre para mejorar el sonido resultante. En estas aplicaciones, la implementación del filtro es polifónica, es decir, que un filtro distinto es implementado para cada voz y que debe ser ajustable dinámicamente en parámetros como su frecuencia de corte o su factor de calidad
Como ya sabemos, para el sonido del piano, el carácter del tono cambia drásticamente en función del nivel de amplitud, siendo muy brillante en los tonos fuertes y más suave en los débiles. Esto puede solucionarse con la técnica de división en velocidad comentada anteriormente, pero también pueden usarse filtrado digital implementando un filtro paso de baja con una frecuencia de corte que varíe en función de la velocidad de la nota. Este filtro digital ajusta dinámicamente el espectro en

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
65
frecuencia de la señal resultante en función de la velocidad de la nota, permitiendo una recreación muy eficaz de este efecto pianístico tan importante.
Otra importante aplicación del filtrado digital es el suavizado de las transiciones entre muestras. Como se comentó, las muestras almacenadas llevan incorporado este suavizado haciendo corresponder las muestras inicial y final de cada segmento. Sin embargo al realizar desplazamiento del pitch, puede perderse esta correspondencia. Por ello suele utilizarse algún tipo de filtrado para suavizar este efecto.
También en la técnica de división del teclado, en la frontera entre divisiones, existen notas provenientes de diferentes muestras. Una de estas muestras ha sido generada aumentando el pitch mientras que la otra puede provenir de una disminución del pitch, y por tanto el timbre de cada nota puede ser significativamente diferente. Este problema puede aliviarse, empleando un filtro digital que use el número de nota para controlar las características del filtro. Dichas características se diseñan para compensar el desplazamiento del pitch asociado con la división del teclado en splits.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
66
4.2. Modelos físicos Al contrario que los modelos de señal, que buscan modelar la señal resultante, la principal característica de los modelos físicos es que describen los sistemas de generación del sonido con respecto a su comportamiento físico. Dichos sistemas pueden reconstruirse bien a partir del conocimiento de las leyes físicas que gobiernan las partes vibrantes del sistema y expresándolas como ecuaciones diferenciales, o bien directamente a partir del comportamiento de la solución de la solución de dichas ecuaciones.
Existen dos razones fundamentales para utilizar modelos físicos de señal. Una es la comprensión del fenómeno físico involucrado en la producción del sonido y otra es la síntesis misma del sonido. Pero si el propósito es modelar un piano real y reproducir su tono lo más fielmente posible, estas dos motivaciones están inexorablemente relacionadas y la precisión del sonido sintetizado validará el diseño del modelo físico.
Los modelos físicos dan una respuesta realista a la interacción del pianista, dado que los parámetros del modelo están directamente relacionados con las características físicas del instrumento y por consiguiente con la gesticulación del pianista. Estos modelos son generalmente complicados y requieren un elevado coste computacional.
Un problema añadido del modelado físico es que, para cada instrumento, se necesita un modelo completamente nuevo para producir un sonido realista. Si los fabricantes quieren ofrecer una amplia variedad de instrumentos, necesitan sistemas hardware más flexibles, como puede ser un dispositivo de propósito general, es decir un ordenador, con los consiguientes problemas de síntesis en tiempo real, debido a la gran cantidad de parámetros a procesar.
Los músicos experimentados querrán tener control total sobre el instrumento, para conseguir interpretaciones realmente expresivas, pero los amateurs prefieren crear sonidos convincentes sin necesidad de años de práctica. Este problema limita por ahora el modelado físico a sintetizadores especialitos más que a módulos de propósito general, panorama que puede cambiar con la creciente velocidad de crecimiento de la potencia de los procesadores.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
67
4.2.1. Método de diferencias finitas El primer método usado en modelado físico estaba basado en ecuaciones de diferencias finitas. El principio básico era obtener la ecuación matemática que describe el movimiento vibratorio y resolverla en un conjunto finito de puntos. La ecuación en diferencias finitas así obtenida simula la propagación de las ondas en el sistema. Hiller y Ruiz son los primeros en proponer el primer método de diferencias finitas para propósitos de síntesis de sonido. Chaigne y Askenfelt, proponen uno de los modelos más realistas de cuerda de piano percutida, combinando el trabajo de Hiller y Ruiz con un modelo no-lineal de martillo. Un modelo más completo de piano, tomando en consideración la tabla de armonía fue presentado por Hikichi y Osaka. Descripción del fenómeno sonoro El piano es un ejemplo de cuerda golpeada de forma no lineal. La descripción física es simple en el sentido de que sólo la velocidad del martillo constituye una variable de control cuando la cuerda es golpeada, puesto que el dedo que presiona la tecla no tiene conexión mecánica significativa con el martillo una vez que éste es lanzado hacia la cuerda. Este hecho es el responsable de que el sistema MIDI proporcione una representación suficiente para describir la ejecución pianística, ya que la dimensionalidad del control (dejando a un lado los pedales), se confina a un grado de libertad por tecla, el parámetro velocidad. Las cuerdas del piano, son uniformes, bastante tensas y con un terminación casi rígida. Por tanto, se comportan de modo altamente lineal bajo condiciones normales de ejecución. El modelo de guiaonda digital para modelado de cuerdas resulta por tanto muy conveniente para una cuerda de piano individual. Sin embargo, otros factores nada despreciables como la rigidez de las cuerdas o el acoplamiento entre las mismas incrementan el coste de la implementación. Menos importante es la existencia de los dos modos de vibración longitudinal y transversal, así como el acoplamiento entre todas las cuerdas cuando el pedal derecho está activado. Con el fin de simplificar el sistema, tomaremos inicialmente en consideración solamente las vibraciones en el plano vertical para una sola cuerda por tecla. Por supuesto, en un sistema de alta calidad, debe
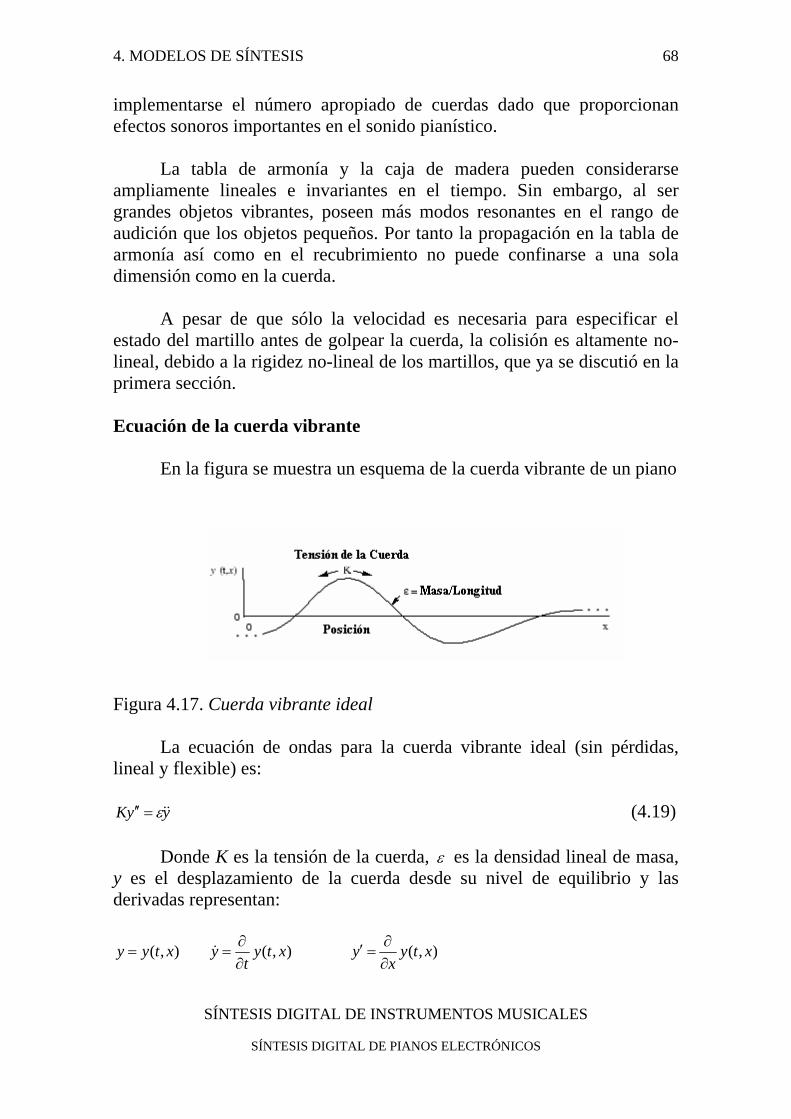
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
68
implementarse el número apropiado de cuerdas dado que proporcionan efectos sonoros importantes en el sonido pianístico.
La tabla de armonía y la caja de madera pueden considerarse ampliamente lineales e invariantes en el tiempo. Sin embargo, al ser grandes objetos vibrantes, poseen más modos resonantes en el rango de audición que los objetos pequeños. Por tanto la propagación en la tabla de armonía así como en el recubrimiento no puede confinarse a una sola dimensión como en la cuerda. A pesar de que sólo la velocidad es necesaria para especificar el estado del martillo antes de golpear la cuerda, la colisión es altamente no-lineal, debido a la rigidez no-lineal de los martillos, que ya se discutió en la primera sección. Ecuación de la cuerda vibrante En la figura se muestra un esquema de la cuerda vibrante de un piano Figura 4.17. Cuerda vibrante ideal La ecuación de ondas para la cuerda vibrante ideal (sin pérdidas, lineal y flexible) es:
yyK &&ε=′′ (4.19) Donde K es la tensión de la cuerda, ε es la densidad lineal de masa, y es el desplazamiento de la cuerda desde su nivel de equilibrio y las derivadas representan:
),( xtyy = ),( xtyt
y∂∂
=& ),( xtyx
y∂∂
=′

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
69
La ecuación de ondas Ec. (4.19), puede interpretarse a la luz de la segunda ley de Newton maF = , en una escala microscópica. Dado que estamos interesados en las vibraciones transversales de la cuerda, la fuerza recuperadora relevante (por unidad de longitud) viene dada por la fuerza restauradora de los materiales elásticos, es decir, yKF ′′= . Es proporcional a la tensión de la cuerda K y depende del desplazamiento con respecto al nivel de equilibrio. Esta fuerza recuperadora es equilibrada en todos los puntos por la fuerza inercial por unidad de longitud de la cuerda que viene dada por la ley yF &&ε= , donde y&& no es más que la aceleración transversal y ε la densidad de masa. Para crear un modelo computacional a partir de una ecuación diferencial, aplicamos la aproximación de diferencias finitas, mediante el cual, la diferenciación se sustituye por una diferencia finita.
TxTtyxtyxty ),(),(),( −−
≈& (4.20) X
xTtyxtyxty ),(),(),( −−≈′ (4.21)
Donde T es el intervalo de muestreo temporal usado en la simulación y X es el intervalo de muestreo espacial. Estas aproximaciones pueden derivarse directamente de la definición de derivada parcial. Las aproximaciones se vuelven exactas tomando límite cuando los intervalos de muestreos tienden a cero. Para las derivadas de segundo orden, las aproximaciones de diferencias finitas se definen como:
2
),(),(2),(),(T
xTtyxtyxTtyxty −+−+≈&& (4.22)
2
),(),(2),(),(X
XxtyxtyXxtyxty −+−+≈′′ (4.23)
Sustituyendo la aproximación de diferencias finitas o FDA en la ecuación de ondas se obtiene:
ε=−+−+2
),(),(2),(X
XxtyxtyXxtyK 2
),(),(2),(T
xTtyxtyxTty −+−+ (4.24)

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
70
Que puede resolverse obteniendo una fórmula recursiva para el desplazamiento de la cuerda y:
[ ] ),(),(2),(),(2),(),( 2
2
xTtyxtyXxtyxtyXxtyX
KTxTty −−+−+−+=+ε
(4.25)
En una implementación práctica, es común tomar 1=T , TKXε
= , y
evaluar la recursión en los enteros nTt = y mXx = para obtener la ecuación en diferencias:
),1()1,()1,(),1( mnymnymnymny −−−++=+ (4.26) Por consiguiente, para actualizar los valores del desplazamiento de la cuerda )1( +ny , necesitamos los valores anteriores en los instantes n y
1−n , para cualquier punto m de la cuerda. La adición a la ecuación de onda de términos correspondientes a fenómenos de pérdidas y dispersión proporciona más términos de la forma
),( kmlny −− . Estos términos pueden agruparse bajo una forma más general
∑∑∑∑∞
=
∞
=
∞
=
∞
= ∂∂∂∂
=∂∂
∂∂
0 0,
0 0,
),(),(m
nm
nm
nnm
klk
lk
llk xt
xtyxt
xty βα (4.27)
Descomposición de onda viajera La ecuación de ondas unidimensional yyK &&ε=′′ admite como solución general:
)()(),(cxty
cxtyxty lr ++−= (4.28)
que se conoce como solución de D’Alembert
Donde εKc = es la velocidad de onda. )(cxtyr − representa la onda
viajera desplazándose hacia la derecha mientras que )(cxtyl + representa la
onda viajera desplazándose hacia la izquierda. Ambas funciones deben ser doblemente diferenciables.

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
71
Esta solución tiene la ventaja de que una función de dos variables
),( xty ha sido reemplazada por dos funciones de una sola variable en unidades temporales, lo que reduce notablemente el cálculo computacional. Además cada onda viajera satisface la ecuación de ondas ideal:
rrrr ycc
xtytcc
xtyx
y &1)(1)( −
=−∂∂−
=−∂∂
=′ rrr yc
yc
y &&&& 2
2 11=⎟
⎠⎞
⎜⎝⎛−=′′ (4.29)
llll ycc
xtytcc
xtyx
y &1)(1)( =−
∂∂
=+∂∂
=′ lll yc
yc
y &&&& 2
2 11=⎟
⎠⎞
⎜⎝⎛=′′ (4.30)
Por lo que ycy ′′= 2&& para ambas ondas viajeras Una solución para la ecuación de ondas de la cuerda vibrante puede hallarse mediante una exponencial de la forma:
vxstexty +=),( (4.31) Sustituyendo en la ecuación de onda Ec. 4.19. se obtiene:
ysyyKvyK 22 εε ===′′ && De donde 22
2
cvsK
==ε
(4.32)
Así que la solución puede escribirse como:
)(),( cxtsexty ±= (4.33) Por superposición, una solución más completa es:
)/()/( )()(),( cxtsi
cxtsi
i
ii esAesAxty +−−++=∑ (4.34)
Donde )( isA+ y )( isA− son funciones arbitrarias de variable compleja. Tomando jws = y extendiendo la suma a una integral, tenemos de nuevo la solución D’Alembert.
)()(),(cxty
cxtyxty lr ++−= (4.28)
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
72
4.2.2. Síntesis modal La síntesis modal está basada en la premisa de que cualquier objeto productor de sonido, puede ser representado como un conjunto de subestructuras vibrantes, que quedan definidas por su caracterización modal. Las subestructuras están acopladas entre sí y pueden responder a excitaciones externas. Este método es general dado que puede ser aplicado a estructuras de complejidad arbitraria. Sin embargo, el coste computacional necesario, se incrementa con rapidez al aumentar la complejidad del sistema lo que impone serias aplicaciones prácticas a su implementación, sobre todo a la hora de desarrollar instrumentos musicales en tiempo real. La caracterización modal para una subestructura dada, consiste en las frecuencias y los coeficientes de amortiguamiento de los modos resonantes de la estructura así como la forma de cada uno de esos modos. Un modo resonante se define esencialmente como un movimiento particular del sistema en el que cada punto de la estructura vibra con la misma frecuencia. Cualquier movimiento arbitrario de esa estructura puede ser expresado como la suma de las contribuciones de cada uno de esos modos. Los modos son excitados por una fuerza externa aplicada a un punto dado de la estructura. La energía de excitación se distribuye entre los modos según la forma de la excitación. Se asume normalmente que no existe intercambio de energía alguno entre los modos. En la práctica, el patrón de vibración resultante no puede ser completamente descrito por un modo único, sino por la suma de infinitas contribuciones. No obstante, para poder implementar la respuesta numéricamente, la estructura continua debe ser dividida en un conjunto finito de puntos. La caracterización modal puede ser obtenida analíticamente para estructuras vibratorias simples, a partir de las ecuaciones diferenciales que gobiernan su movimiento. Para estructuras complejas, el cálculo directo de los datos no es posible y puede utilizarse un análisis basado en medidas experimentales. Para una estructura mecánica dividida en N puntos, la velocidad instantánea de cada punto puede calcularse en función de la contribución de cada modo y de la fuerza externa ejercida. Conocidos estos, puede calcularse la velocidad de cada punto del sistema lo que proporciona la respuesta sonora buscada.
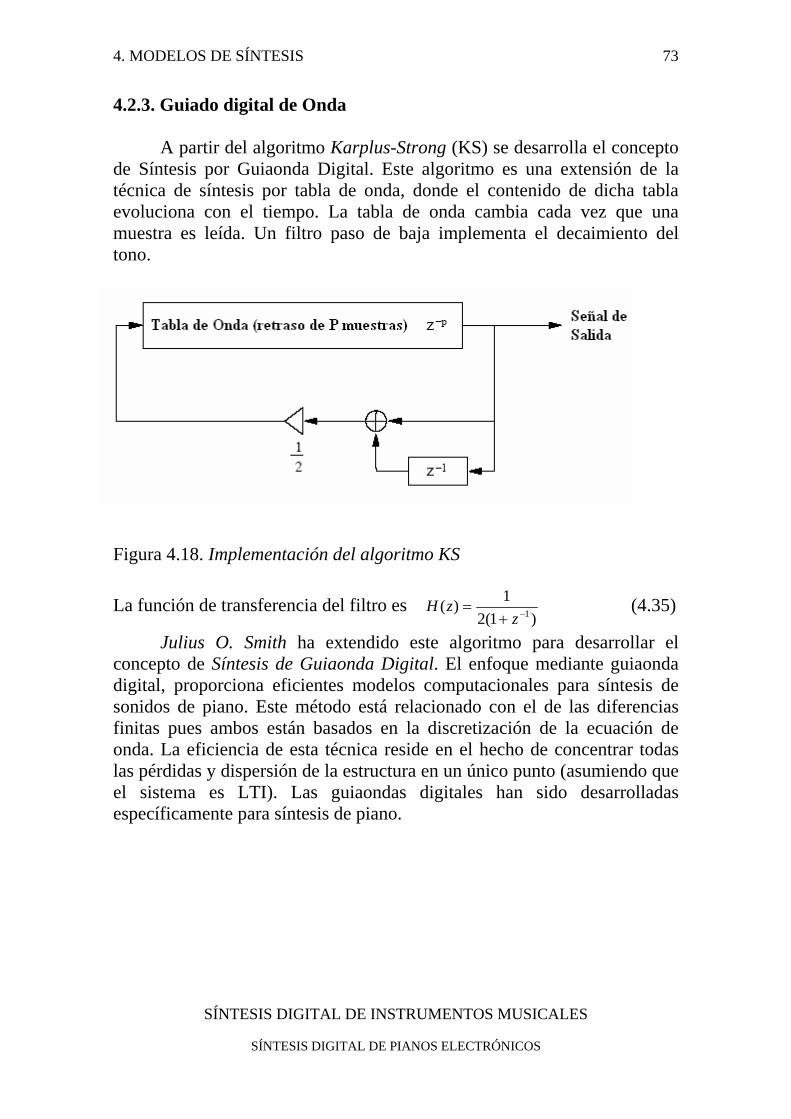
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
73
4.2.3. Guiado digital de Onda A partir del algoritmo Karplus-Strong (KS) se desarrolla el concepto de Síntesis por Guiaonda Digital. Este algoritmo es una extensión de la técnica de síntesis por tabla de onda, donde el contenido de dicha tabla evoluciona con el tiempo. La tabla de onda cambia cada vez que una muestra es leída. Un filtro paso de baja implementa el decaimiento del tono.
Figura 4.18. Implementación del algoritmo KS La función de transferencia del filtro es
)1(21)( 1−+
=z
zH (4.35)
Julius O. Smith ha extendido este algoritmo para desarrollar el concepto de Síntesis de Guiaonda Digital. El enfoque mediante guiaonda digital, proporciona eficientes modelos computacionales para síntesis de sonidos de piano. Este método está relacionado con el de las diferencias finitas pues ambos están basados en la discretización de la ecuación de onda. La eficiencia de esta técnica reside en el hecho de concentrar todas las pérdidas y dispersión de la estructura en un único punto (asumiendo que el sistema es LTI). Las guiaondas digitales han sido desarrolladas específicamente para síntesis de piano.
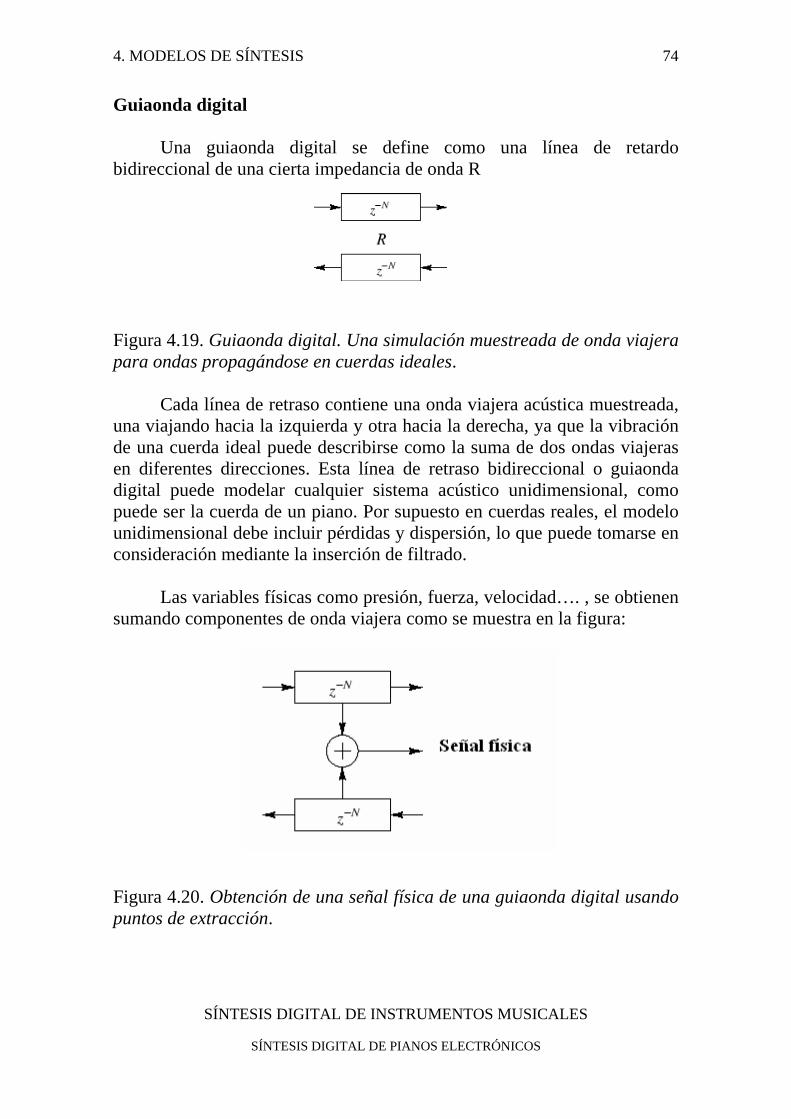
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
74
Guiaonda digital Una guiaonda digital se define como una línea de retardo bidireccional de una cierta impedancia de onda R Figura 4.19. Guiaonda digital. Una simulación muestreada de onda viajera para ondas propagándose en cuerdas ideales. Cada línea de retraso contiene una onda viajera acústica muestreada, una viajando hacia la izquierda y otra hacia la derecha, ya que la vibración de una cuerda ideal puede describirse como la suma de dos ondas viajeras en diferentes direcciones. Esta línea de retraso bidireccional o guiaonda digital puede modelar cualquier sistema acústico unidimensional, como puede ser la cuerda de un piano. Por supuesto en cuerdas reales, el modelo unidimensional debe incluir pérdidas y dispersión, lo que puede tomarse en consideración mediante la inserción de filtrado. Las variables físicas como presión, fuerza, velocidad…. , se obtienen sumando componentes de onda viajera como se muestra en la figura: Figura 4.20. Obtención de una señal física de una guiaonda digital usando puntos de extracción.

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
75
La magnitud física buscada se obtiene sumando las dos ondas viajeras. Una onda viajera en sí misma no tiene significado físico al menos que la señal en sentido opuesto sea nula. Las ondas viajeras son eficientes para la simulación, pero no pueden medirse directamente en la realidad física. Modelado por guiaonda digital Para transportar la solución de onda viajera al dominio digital es necesario muestrear la amplitud de las ondas viajeras a una tasa de
Tfs /1= muestras por segundo donde T es el periodo de muestreo. La elección natural para el intervalo de muestreo espacial X es la distancia que recorre el sonido en un periodo de muestreo T, cTX = . El muestreo se lleva a cabo formalmente mediante el cambio de variables:
mXxm = (4.36) nTtn =
Sustituyendo en la solución de D’Alembert (4.28) tenemos:
[ ] [ ] )()()()(
)/()/(),(
mnymnyTmnyTmny
cmXnTycmXnTyxty
lr
lrmn
++−=++−
=++−=−+
(4.37)
Donde hemos llamado )()( kTyky r=+ , )()( kTyky l=−
El término )( mny −+ puede interpretarse como el resultado de un retraso de m muestras a la señal cuyo valor es )(ny+ , mientras que el término )( mny +− puede verse como la señal de entrada a una línea de retraso cuya salida es )(ny− . Esto lleva al siguiente esquema: Figura 4.21. Simulación digital de una guiaonda sin pérdidas.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
76
Dado que )(ny+ es la componente que viaja hacia la derecha, le asignamos el rail superior. Análogamente ocurre para )(ny− . Nótese que la posición a lo largo de la cuerda mCTmXxm == está colocada de izquierda a derecha en el diagrama, dando así una interpretación física a su horizontalidad. Finalmente, las ondas viajeras en ambos sentidos pueden sumarse para generar una salida con significado físico de acuerdo a la fórmula:
)()(),( mnymnyxty mn ++−= −+ (4.37) Por tanto, podemos calcular el desplazamiento físico de la cuerda en cualquier intervalo de muestreo mx mediante la simple suma de los raíles superior e inferior, como puede verse en la figura en las posiciones 0=x y
Xx 3= . El diagrama es similar a las estructuras de filtrado en escalera o lattice, excepto por los retrasos en el raíl superior, la ausencia de uniones de scattering, y la interpretación física directa. Para obtener un filtro en escalera bastaría simplemente con introducir una terminación rígida en el límite derecho y conmutar los retrasos del raíl superior al raíl inferior. Cualquier guiaonda ideal unidimensional puede simularse de esta forma. Es importante advertir que la simulación es exacta en los instantes de muestreos, dentro de la precisión numérica de las muestras. Para evitar el aliasing asociado al muestreo, se requiere que todas las formas de onda que viajan sobre la cuerda sean inicialmente limitadas en banda a la mitad de la frecuencia de muestreo. En otras palabras, el espectro de las señales )()( tyty lr no debe exceder la frecuencia temporal de muestreo
Tfs 1= , así como las frecuencias espaciales no pueden exceder la mitad de la frecuencia espacial de muestreo. Un diagrama de simulación más compacto que permite representar simulaciones de guiaondas tanto muestreadas como continuas se muestra en la figura. La figura enfatiza que la guiaonda ideal sin pérdida es simulada por una línea de retraso bidireccional, y que la interpolación espacial limitada en banda puede usarse para obtener un resultado para una posición x que no sea múltiplo de cT. La interpolación limitada en banda sirve además para evaluar la forma de onda en un tiempo arbitrario que no sea necesariamente un múltiplo de T
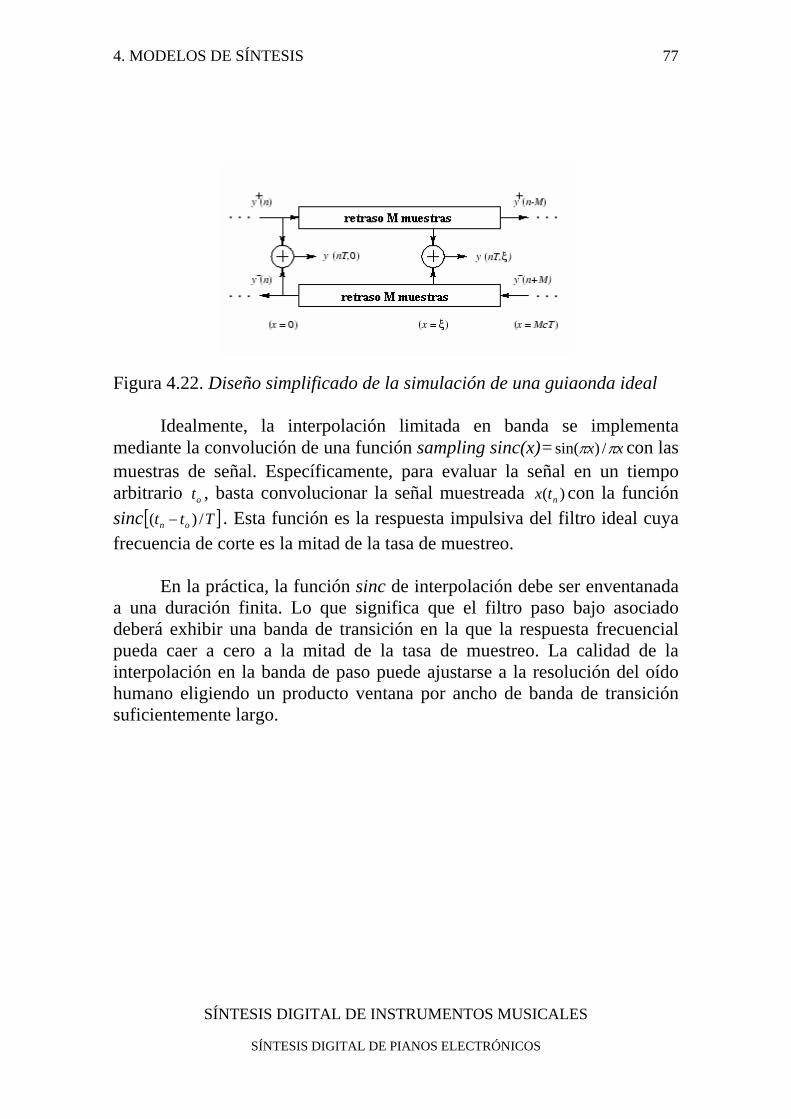
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
77
Figura 4.22. Diseño simplificado de la simulación de una guiaonda ideal Idealmente, la interpolación limitada en banda se implementa mediante la convolución de una función sampling sinc(x)= xx ππ /)sin( con las muestras de señal. Específicamente, para evaluar la señal en un tiempo arbitrario ot , basta convolucionar la señal muestreada )( ntx con la función sinc [ ]Ttt on /)( − . Esta función es la respuesta impulsiva del filtro ideal cuya frecuencia de corte es la mitad de la tasa de muestreo. En la práctica, la función sinc de interpolación debe ser enventanada a una duración finita. Lo que significa que el filtro paso bajo asociado deberá exhibir una banda de transición en la que la respuesta frecuencial pueda caer a cero a la mitad de la tasa de muestreo. La calidad de la interpolación en la banda de paso puede ajustarse a la resolución del oído humano eligiendo un producto ventana por ancho de banda de transición suficientemente largo.

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
78
Relación con la recursión en diferencias finitas Puede demostrarse que la técnica de simulación por guiaonda digital es equivalente a la recursión producida por el esquema de aproximación por diferencias finitas aplicado a la ecuación de ondas que proporcionaba:
),1()1,()1,(),1( mnymnymnymny −−−++=+ (4.26)
Para comparar esta ecuación con la descripción por guiaonda sustituimos la descomposición en onda viajera
[ ]
),1()1()1(
)1()1()1()1()1()1()1()1())1(())1(())1(())1((
),1()1,()1,())1(())1((),1(
mnymnymny
mnymnymnymnymnymnymnymnymnymnymnymny
mnymnymnymnymnymny
+=++++−=
=−++−−−−+++−++++−−=
=+−+−−−−++−−+++++−=
−−−++==+++−+=+
−+
−+−+−+
−+−+−+
−+
Luego observamos que efectivamente el resultado de la recursión FDA es exacto en el caso sin pérdidas, pues es equivalente al método de simulación por guiaonda digital, que es exacto en los instantes de muestreo. La última identidad puede rescribirse como:
))1((())1(())1(())1((
)1()1(),1(
+++−−=
+++−+=
=++++−=+
−+
−+
−+
mnymnymnymny
mnymnymny (4.27)
Lo que significa que el desplazamiento de la cuerda en el tiempo
1+n , posición m , es la superposición de las ondas viajeras derecha e izquierda en las posiciones 1−m y 1+m respectivamente en el tiempo n . En otras palabras, la variable física puede calcularse para el siguiente instante como la suma de las componentes de onda viajera a izquierda y derecha.

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
79
Ecuación de la cuerda vibrante con pérdidas En cualquier cuerda vibrante real, hay pérdidas de energía debidas a las terminaciones flexibles, rozamiento con el aire y fricción interna en la cuerda. Aunque las pérdidas en los sólidos varían generalmente de un modo complicado con la frecuencia, pueden aproximarse normalmente con un pequeño número de términos aditivos en la ecuación de ondas. En el caso más simple, la fuerza de rozamiento es directamente proporcional a la velocidad transversal de la cuerda.
yyyK &&& µε +=′′ (4.28) En este caso, las pérdidas son independientes de la frecuencia. Un modelo más realista de aproximación de las pérdidas incluiría más derivadas temporales de orden impar, proporcionando pérdidas dependientes con la frecuencia. Tomando vxstexty +=),( en la ecuación de ondas, tenemos:
syysyyyKvyK µεµε +=+==′′ 22 &&& ssKv µε += 22 (4.29)
)1()1( 2
22
22
scs
ss
KKssv
εµ
εµεµε
+=+=+
=
)1(sc
svεµ
+±= (4.30)
Donde c es la velocidad de onda en el caso sin pérdidas. Para altas frecuencias (gran s ), o cuando el coeficiente de fricción µ es pequeño en comparación con la densidad de masa ε , podemos aproximar
ss εµ
εµ
211)1( 2
1
+=+ (4.31)
De modo, que para bajas pérdidas, obtenemos la siguiente relación entre frecuencia temporal y espacial
)2
(1εµ
+±≈ sc
v (4.32)

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
80
La solución de la ecuación de ondas es por tanto:
cx
cxts
cxsstvxst eeeexty ε
µεµ
2)()
2(
),(±±+±+ === (4.33)
Las componentes de onda viajera a la derecha y a la izquierda son
respectivamente: )(
2 cxts
cx
ee−−
εµ
y )(
2 cxts
cx
ee+
εµ
. Ambas decaen exponencialmente en la dirección de propagación. Tomando jws = , y usando superposición para construir formas arbitrarias de onda, se obtiene la solución general en el dominio del tiempo:
)()(),( 22
cxtye
cxtyexty l
cx
rcx
++−=−
εµ
εµ
(4.34)
Muestreando ambas componentes en intervalos temporales de separación T y espaciales de separación X=cT obtenemos:
[ ] [ ])()(
)()(
)/()/(),(
22
22
mnygmnyg
TmnyeTmnye
cmXnTyecmXnTyexty
mml
mT
r
mTl
cmX
rc
mX
mn
++−=
=++−=
=++−=
−−+
−
−
εµ
εµ
εµ
εµ
(4.35)
Donde εµ2T
eg−
= es el factor de pérdidas. El diagrama de simulación para la guiaonda digital con pérdidas se obtiene directamente: Figura 4.23. Simulación discreta de la guiaonda ideal con pérdidas. Como en el caso sin pérdidas, la simulación en tiempo discreto de la solución de onda viajera es una implementación exacta de la solución en tiempo continuo en los instantes de muestreo. Es importante observar que las pérdidas, que están distribuidas en la solución continua son
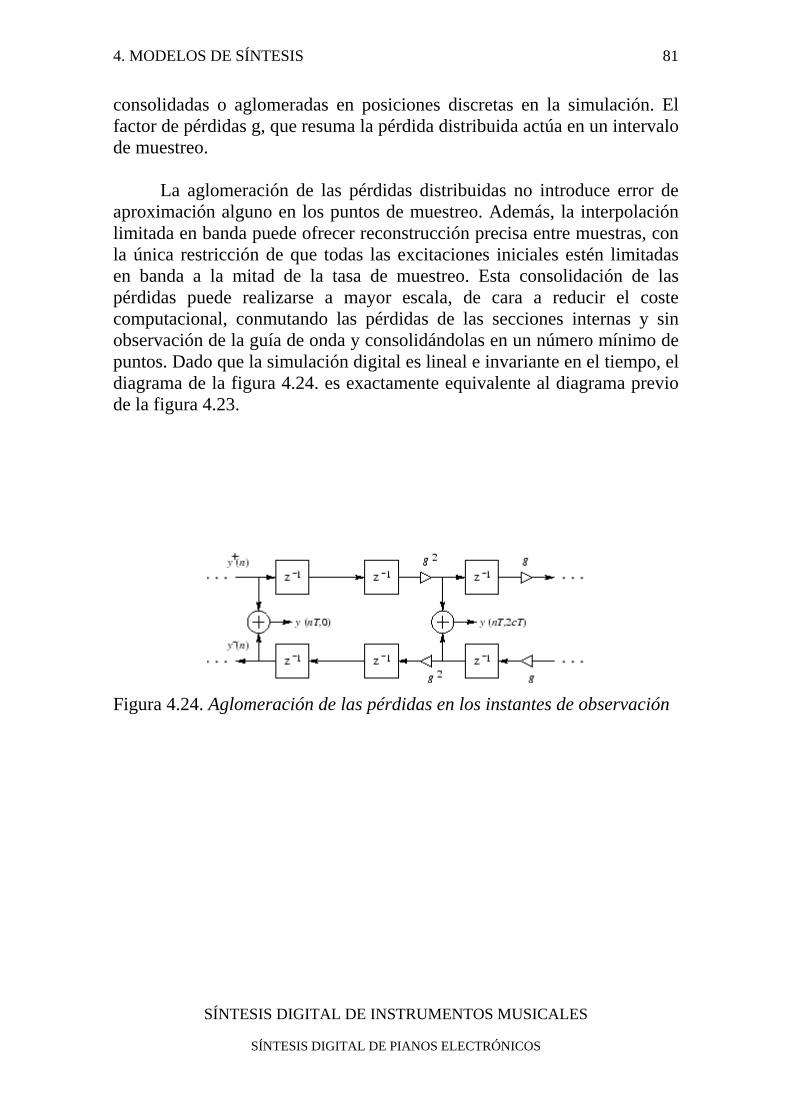
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
81
consolidadas o aglomeradas en posiciones discretas en la simulación. El factor de pérdidas g, que resuma la pérdida distribuida actúa en un intervalo de muestreo. La aglomeración de las pérdidas distribuidas no introduce error de aproximación alguno en los puntos de muestreo. Además, la interpolación limitada en banda puede ofrecer reconstrucción precisa entre muestras, con la única restricción de que todas las excitaciones iniciales estén limitadas en banda a la mitad de la tasa de muestreo. Esta consolidación de las pérdidas puede realizarse a mayor escala, de cara a reducir el coste computacional, conmutando las pérdidas de las secciones internas y sin observación de la guía de onda y consolidándolas en un número mínimo de puntos. Dado que la simulación digital es lineal e invariante en el tiempo, el diagrama de la figura 4.24. es exactamente equivalente al diagrama previo de la figura 4.23. Figura 4.24. Aglomeración de las pérdidas en los instantes de observación
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
82
Modelado del sistema completo La tabla de armonía y el cuerpo del piano pueden modelarse fácilmente en el sentido de que son componentes altamente lineales, e invariantes en tiempo. Los problemas de implementación se derivan de su gran tamaño, ya que los objetos vibrantes de grandes dimensiones tienen generalmente mayor cantidad de modos resonantes en el rango de audición humana que los objetos pequeños. Además la propagación de guiaonda en el cuerpo del piano no está confinada a una dimensión como en la cuerda. Esto significa que serían necesarias tres estructuras de guiaonda para modelar la tabla de resonancia y el cuerpo del piano, lo que daría lugar a modelos complejos y computacionalmente muy costosos. Esta dificultad puede superarse incluyendo la respuesta compleja del elemento vibrante en la propia excitación (modificada adecuadamente, claro está, por la colisión martillo-cuerda). La misma técnica puede aplicarse igualmente a la particularmente compleja aportación del número de cuerdas que vibran por simpatía al presionar el pedal derecho o sostenuto. La conmutatividad de estos elementos solo es posible debido a que poseen propiedades altamente lineales. El modelado del martillo resulta algo más complejo. A pesar de que solo la velocidad es necesaria para especificar el estado inicial previo a la colisión, sabemos ya que ésta es altamente no-lineal. Esta no-linealidad proviene del fieltro que recubre el martillo, que al comprimirse actúa como un muelle de constante elástica variable. Además, deben tenerse en cuenta casos complejos como la posibilidad de que el martillo golpee la cuerda una segunda vez antes de que la primera excitación haya desaparecido completamente. Exceptuando al martillo, el resto del instrumento exhibe características que pueden ser aproximadas satisfactoriamente usando un modelo lineal. La observación clave a la hora de modelar el instrumento es notar que la interacción entre martillo y cuerda consiste esencialmente en unos pocos eventos discretos para cada golpe de martillo siempre y cuando la cuerda se encuentre inicialmente en reposo. Por tanto, la interacción martillo-cuerda puede aproximarse mediante uno o pocos impulsos discretos filtrados convenientemente para incluir la no-linealidad del martillo.
Cuando el martillo golpea por primera vez la cuerda en reposo encuentra una impedancia equivalente a una cuerda de longitud infinita.
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
83
Por tanto, el pulso resultante de la colisión puede ser modelado como un impulso unitario filtrado convenientemente. La perturbación se propaga en ambas direcciones pero dado que el martillo golpea cerca del clavijero, la onda reflejada en la clavija regresará al punto de colisión antes de que tenga lugar cualquier otra interacción. Puesto que la onda reflejada es una versión ligeramente filtrada del pulso original puede representarse también por un impulso unitario filtrado. Este pulso secundario discurre sobre el martillo. Si el martillo ya no está en contacto con la tecla no hay más interacción y el pulso original es la excitación completa. Sin embargo, esto no es lo usual debido a la cercanía del clavijero al punto de colisión, lo que significa que se emitirá un nuevo pulso que viajará alejándose del punto de colisión de una forma similar a la excitación original. En pianos reales, hay generalmente dos o tres interacciones antes de que el martillo se separe de la tecla, excepto para tonos muy agudos. En gran medida, el número de impulsos generados viene determinado por la cuerda que es golpeada. Por tanto, dado el número de la cuerda y la velocidad del martillo, junto con la actual velocidad de cuerda, se puede predecir de forma aceptable la amplitud y cronología de todos los impulsos. Existe sin embargo una relativa imprecisión que ignoraremos en relación con el hecho de que cuando el martillo golpea una cuerda que ya está vibrando, el historial completo de la vibración de la cuerda interviene en los detalles de la interacción martillo-cuerda. Afortunadamente, este es un efecto de segundo orden que puede no ser deseable en la simulación. Todo pianista ha observado alguna vez una nota inesperadamente brillante, correspondiente quizá a la colisión de una cuerda vibrante cuando ésta se aproxima al martillo, y que supone una ruptura de la continuidad dinámica en el caso de un pianissimo. De modo que quizá supone una mejora el hecho de eliminar la incertidumbre en la interacción martillo-cuerda. En caso contrario, puede añadirse un grado adecuado de impredecibilidad introduciendo perturbaciones aleatorias en los niveles del impulso de colisión en función de la amplitud de las vibraciones previas al golpe de martillo. De forma más precisa, la velocidad de la cuerda en el momento del impacto sv puede usarse para corregir apropiadamente la amplitud del impulso de colisión.
La amplitud de cada impulso de colisión determina la configuración del filtro que convierte el impulso unitario en la forma de onda adecuada a las condiciones dadas. Para el golpe inicial, el pulso puede calcularse usando un modelo de martillo de piano golpeando una cuerda con velocidad de colisión shc vvv −= , donde hv denota la velocidad del martillo
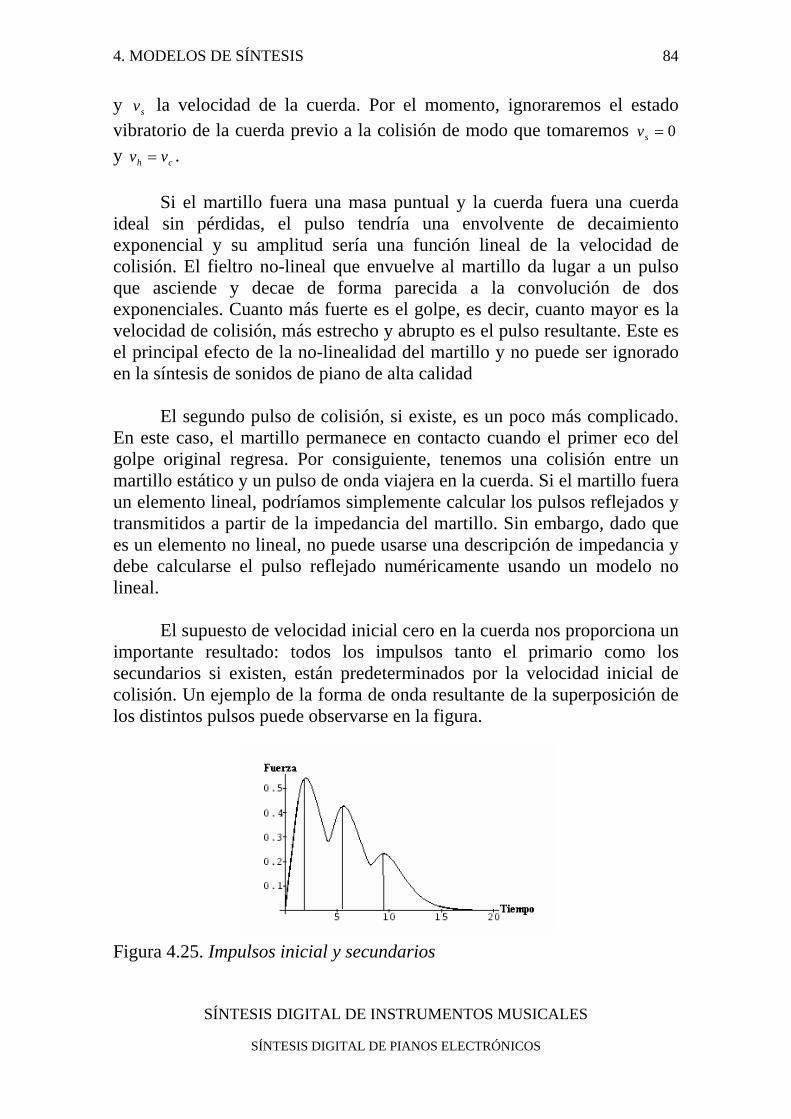
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
84
y sv la velocidad de la cuerda. Por el momento, ignoraremos el estado vibratorio de la cuerda previo a la colisión de modo que tomaremos 0=sv y ch vv = . Si el martillo fuera una masa puntual y la cuerda fuera una cuerda ideal sin pérdidas, el pulso tendría una envolvente de decaimiento exponencial y su amplitud sería una función lineal de la velocidad de colisión. El fieltro no-lineal que envuelve al martillo da lugar a un pulso que asciende y decae de forma parecida a la convolución de dos exponenciales. Cuanto más fuerte es el golpe, es decir, cuanto mayor es la velocidad de colisión, más estrecho y abrupto es el pulso resultante. Este es el principal efecto de la no-linealidad del martillo y no puede ser ignorado en la síntesis de sonidos de piano de alta calidad El segundo pulso de colisión, si existe, es un poco más complicado. En este caso, el martillo permanece en contacto cuando el primer eco del golpe original regresa. Por consiguiente, tenemos una colisión entre un martillo estático y un pulso de onda viajera en la cuerda. Si el martillo fuera un elemento lineal, podríamos simplemente calcular los pulsos reflejados y transmitidos a partir de la impedancia del martillo. Sin embargo, dado que es un elemento no lineal, no puede usarse una descripción de impedancia y debe calcularse el pulso reflejado numéricamente usando un modelo no lineal. El supuesto de velocidad inicial cero en la cuerda nos proporciona un importante resultado: todos los impulsos tanto el primario como los secundarios si existen, están predeterminados por la velocidad inicial de colisión. Un ejemplo de la forma de onda resultante de la superposición de los distintos pulsos puede observarse en la figura. Figura 4.25. Impulsos inicial y secundarios
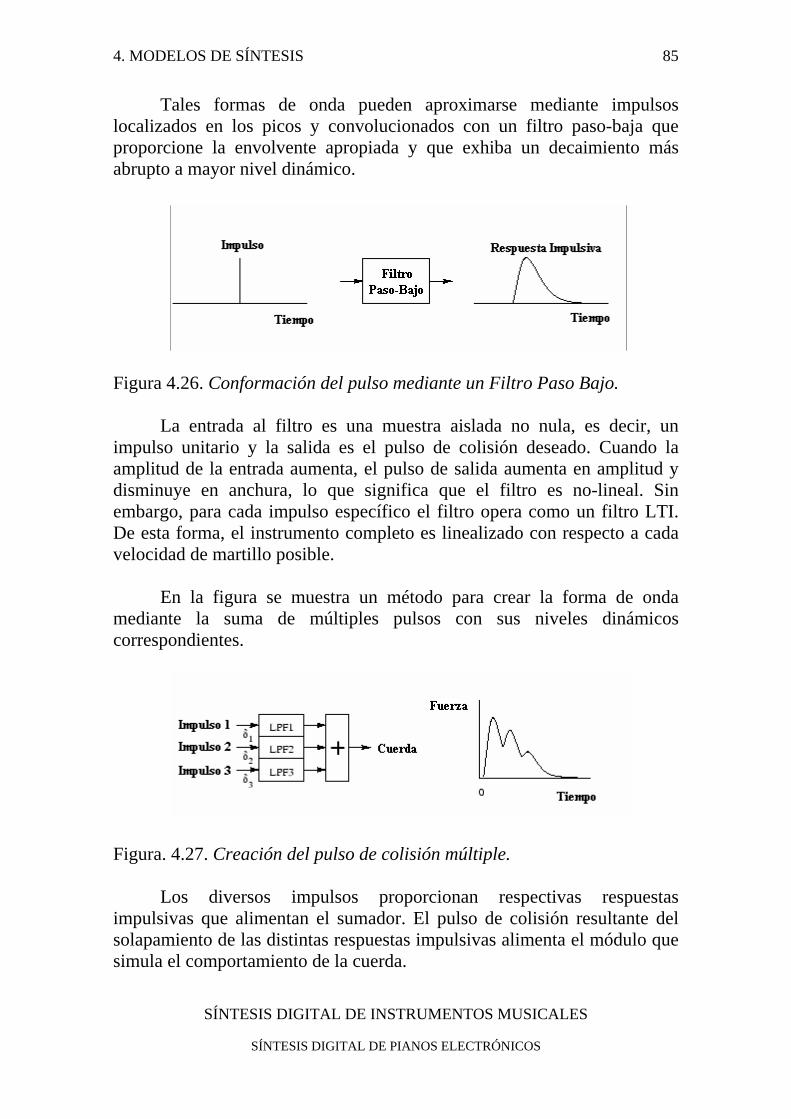
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
85
Tales formas de onda pueden aproximarse mediante impulsos localizados en los picos y convolucionados con un filtro paso-baja que proporcione la envolvente apropiada y que exhiba un decaimiento más abrupto a mayor nivel dinámico. Figura 4.26. Conformación del pulso mediante un Filtro Paso Bajo. La entrada al filtro es una muestra aislada no nula, es decir, un impulso unitario y la salida es el pulso de colisión deseado. Cuando la amplitud de la entrada aumenta, el pulso de salida aumenta en amplitud y disminuye en anchura, lo que significa que el filtro es no-lineal. Sin embargo, para cada impulso específico el filtro opera como un filtro LTI. De esta forma, el instrumento completo es linealizado con respecto a cada velocidad de martillo posible. En la figura se muestra un método para crear la forma de onda mediante la suma de múltiples pulsos con sus niveles dinámicos correspondientes. Figura. 4.27. Creación del pulso de colisión múltiple. Los diversos impulsos proporcionan respectivas respuestas impulsivas que alimentan el sumador. El pulso de colisión resultante del solapamiento de las distintas respuestas impulsivas alimenta el módulo que simula el comportamiento de la cuerda.

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
86
El diagrama del sistema completo de síntesis a priori se muestra en la siguiente figura:
Figura 4.28. Diagrama de síntesis usando el orden natural de los elementos. Para un nivel dinámico específico, el modelo es totalmente LTI, lo que significa que podemos conmutar sus elementos sin perjuicio del resultado final. Por tanto, a fin de aliviar el coste computacional integramos la respuesta de la tabla de armonía y el cuerpo del piano con el filtro que modela la respuesta del martillo. Figura 4.29. Diagrama de síntesis conmutado. El resultado de la conmutación de los elementos sólo es válido para una velocidad de colisión fija. Para diferentes velocidades de colisión, simplemente hay que modificar convenientemente el filtro que engloba tanto la respuesta del cuerpo del piano como del martillo. El modelo funciona debido a que la no-linealidad fuerte del instrumento está localizada únicamente en la colisión martillo-cuerda, y el resto de eventos pueden ser modelados individualmente como elementos LTI en función de la velocidad de colisión. Es importante notar, que si una cuerda es golpeada antes de que el pulso de excitación finalice, la reproducción debe, o bien terminar prematuramente, o bien calcular el solapamiento de las excitaciones.
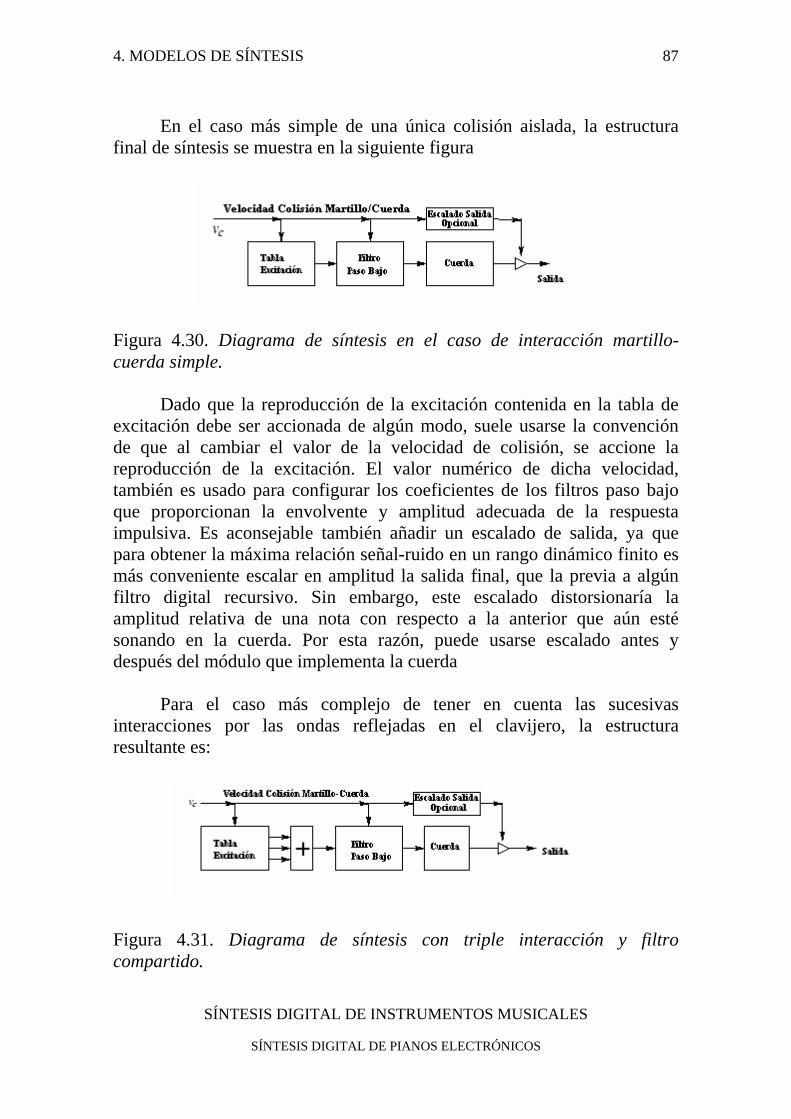
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
87
En el caso más simple de una única colisión aislada, la estructura final de síntesis se muestra en la siguiente figura Figura 4.30. Diagrama de síntesis en el caso de interacción martillo-cuerda simple. Dado que la reproducción de la excitación contenida en la tabla de excitación debe ser accionada de algún modo, suele usarse la convención de que al cambiar el valor de la velocidad de colisión, se accione la reproducción de la excitación. El valor numérico de dicha velocidad, también es usado para configurar los coeficientes de los filtros paso bajo que proporcionan la envolvente y amplitud adecuada de la respuesta impulsiva. Es aconsejable también añadir un escalado de salida, ya que para obtener la máxima relación señal-ruido en un rango dinámico finito es más conveniente escalar en amplitud la salida final, que la previa a algún filtro digital recursivo. Sin embargo, este escalado distorsionaría la amplitud relativa de una nota con respecto a la anterior que aún esté sonando en la cuerda. Por esta razón, puede usarse escalado antes y después del módulo que implementa la cuerda
Para el caso más complejo de tener en cuenta las sucesivas interacciones por las ondas reflejadas en el clavijero, la estructura resultante es: Figura 4.31. Diagrama de síntesis con triple interacción y filtro compartido.
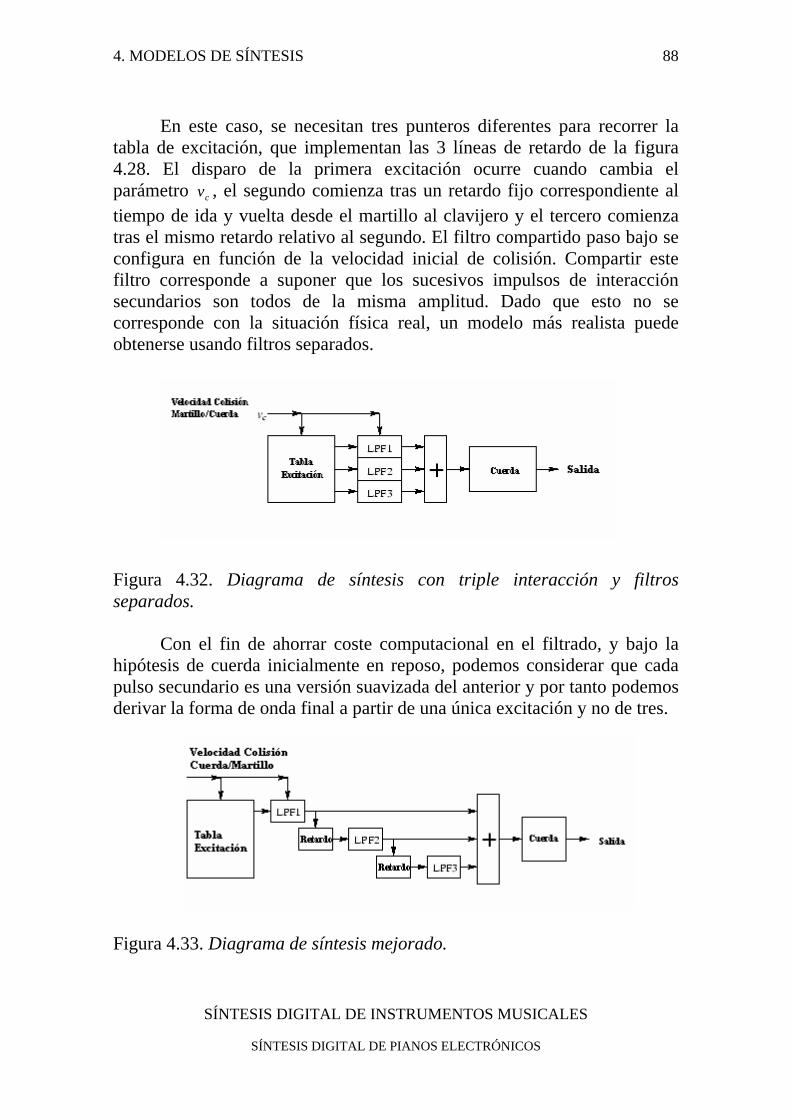
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
88
En este caso, se necesitan tres punteros diferentes para recorrer la tabla de excitación, que implementan las 3 líneas de retardo de la figura 4.28. El disparo de la primera excitación ocurre cuando cambia el parámetro cv , el segundo comienza tras un retardo fijo correspondiente al tiempo de ida y vuelta desde el martillo al clavijero y el tercero comienza tras el mismo retardo relativo al segundo. El filtro compartido paso bajo se configura en función de la velocidad inicial de colisión. Compartir este filtro corresponde a suponer que los sucesivos impulsos de interacción secundarios son todos de la misma amplitud. Dado que esto no se corresponde con la situación física real, un modelo más realista puede obtenerse usando filtros separados. Figura 4.32. Diagrama de síntesis con triple interacción y filtros separados. Con el fin de ahorrar coste computacional en el filtrado, y bajo la hipótesis de cuerda inicialmente en reposo, podemos considerar que cada pulso secundario es una versión suavizada del anterior y por tanto podemos derivar la forma de onda final a partir de una única excitación y no de tres. Figura 4.33. Diagrama de síntesis mejorado.
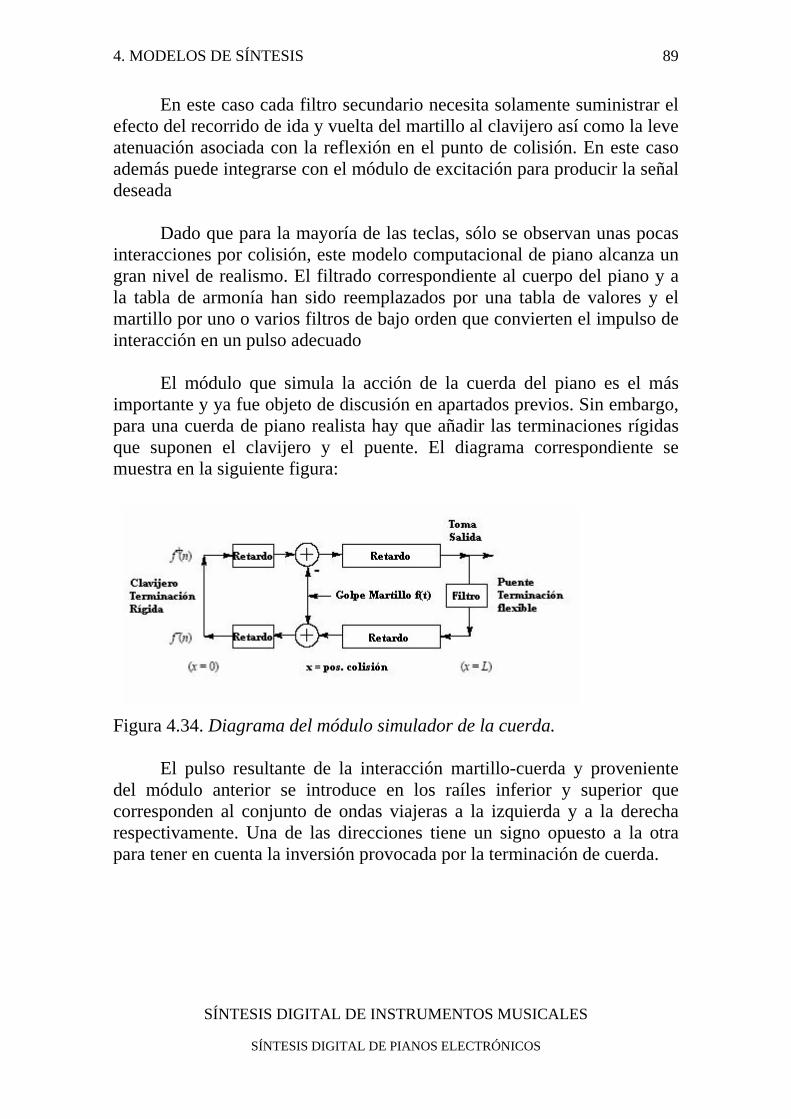
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
89
En este caso cada filtro secundario necesita solamente suministrar el efecto del recorrido de ida y vuelta del martillo al clavijero así como la leve atenuación asociada con la reflexión en el punto de colisión. En este caso además puede integrarse con el módulo de excitación para producir la señal deseada Dado que para la mayoría de las teclas, sólo se observan unas pocas interacciones por colisión, este modelo computacional de piano alcanza un gran nivel de realismo. El filtrado correspondiente al cuerpo del piano y a la tabla de armonía han sido reemplazados por una tabla de valores y el martillo por uno o varios filtros de bajo orden que convierten el impulso de interacción en un pulso adecuado
El módulo que simula la acción de la cuerda del piano es el más importante y ya fue objeto de discusión en apartados previos. Sin embargo, para una cuerda de piano realista hay que añadir las terminaciones rígidas que suponen el clavijero y el puente. El diagrama correspondiente se muestra en la siguiente figura:
Figura 4.34. Diagrama del módulo simulador de la cuerda. El pulso resultante de la interacción martillo-cuerda y proveniente del módulo anterior se introduce en los raíles inferior y superior que corresponden al conjunto de ondas viajeras a la izquierda y a la derecha respectivamente. Una de las direcciones tiene un signo opuesto a la otra para tener en cuenta la inversión provocada por la terminación de cuerda.
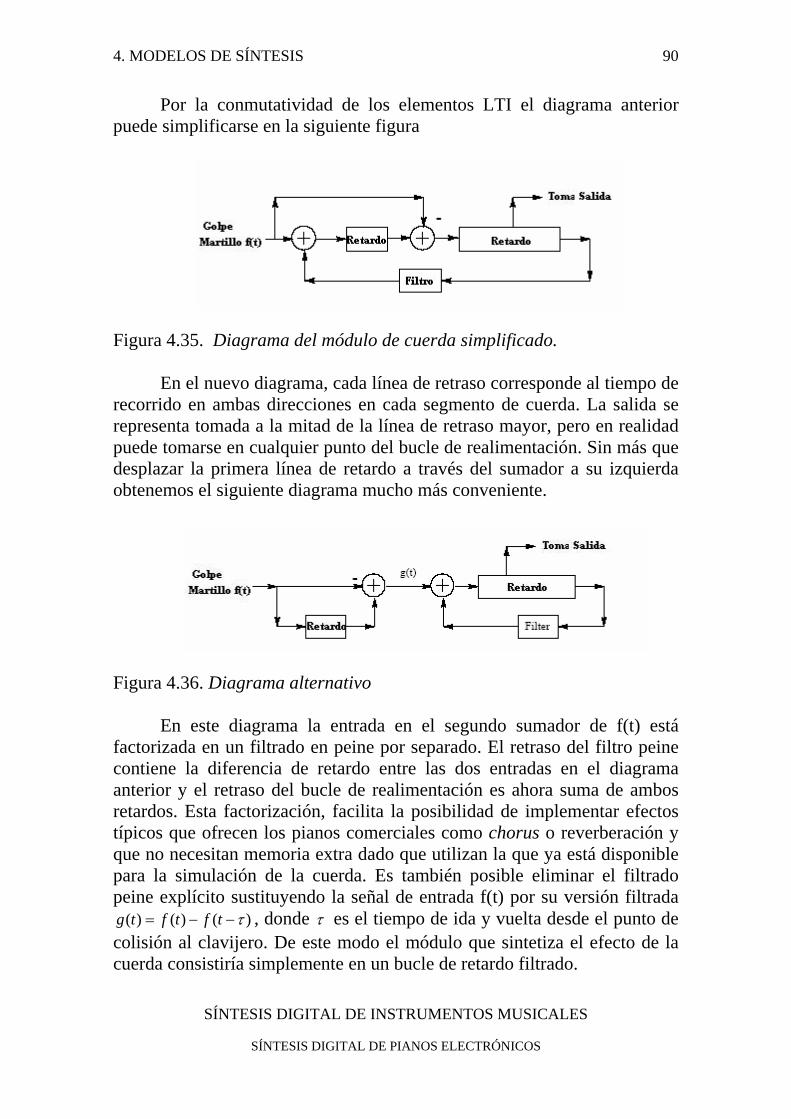
4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
90
Por la conmutatividad de los elementos LTI el diagrama anterior puede simplificarse en la siguiente figura Figura 4.35. Diagrama del módulo de cuerda simplificado. En el nuevo diagrama, cada línea de retraso corresponde al tiempo de recorrido en ambas direcciones en cada segmento de cuerda. La salida se representa tomada a la mitad de la línea de retraso mayor, pero en realidad puede tomarse en cualquier punto del bucle de realimentación. Sin más que desplazar la primera línea de retardo a través del sumador a su izquierda obtenemos el siguiente diagrama mucho más conveniente. Figura 4.36. Diagrama alternativo En este diagrama la entrada en el segundo sumador de f(t) está factorizada en un filtrado en peine por separado. El retraso del filtro peine contiene la diferencia de retardo entre las dos entradas en el diagrama anterior y el retraso del bucle de realimentación es ahora suma de ambos retardos. Esta factorización, facilita la posibilidad de implementar efectos típicos que ofrecen los pianos comerciales como chorus o reverberación y que no necesitan memoria extra dado que utilizan la que ya está disponible para la simulación de la cuerda. Es también posible eliminar el filtrado peine explícito sustituyendo la señal de entrada f(t) por su versión filtrada
)()()( τ−−= tftftg , donde τ es el tiempo de ida y vuelta desde el punto de colisión al clavijero. De este modo el módulo que sintetiza el efecto de la cuerda consistiría simplemente en un bucle de retardo filtrado.

4. MODELOS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
91
Por supuesto, para síntesis de calidad, habría que emplear múltiples bucles de retardo por cada nota. Cada bucle correspondería a una cuerda diferente golpeada por el mismo martillo. Por consiguiente, en un sintetizador comercial deberían existir al menos dos bucles de retardo, desajustados levemente y excitados por el mismo pulso de colisión.
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
92
5. El Sistema MIDI Los modelos de síntesis de sonido, simulan los mecanismos de generación interna del sonido o bien los efectos sonoros que producen. En este sentido, podemos decir que una vez analizadas las técnicas de síntesis tenemos a nuestra disposición, los martillos, cuerdas, tablas armónica… en definitiva todos los elementos que intervienen en la creación del sonido Sin embargo existe aún otro elemento que separa al pianista de toda la mecánica del instrumento y que a la vez la hace transparente, ofreciéndole un interfaz que solo refleje las cuestiones relevantes para la interpretación artística. Estamos hablando del teclado. Este elemento que no se ha tenido en cuenta hasta ahora a la hora de sintetizar el instrumento, cobra ahora singular importancia como medio de comunicación entre el instrumentista y los mecanismos internos de creación sonora. En un piano electrónico, esta función la realiza el sistema MIDI. Independientemente de la técnica de síntesis utilizada, es necesario un protocolo de comunicación para que los parámetros musicales (frecuencia del tono, duración, dinámica…) sean introducidos en el sintetizador de una forma que permita la ejecución pianística en tiempo real. Dejando a un lado consideraciones de técnica pianística, como la ineludible influencia del tacto y dureza de tecla así como del sistema contrapesado del mecanismo de la acción interno al piano y de otras cuestiones relacionadas con la dinámica muscular en la ejecución, el sistema MIDI se presenta un modo eficaz de comunicación entre el pianista y el instrumento y es especialmente adecuado para simular el modelo de ejecución pianística pudiendo presentar un interfaz físico que recuerda en muchos aspectos el teclado de un piano real.
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
93
5.1. Aspectos básicos
El protocolo de Interfaz Digital para Instrumentos Musicales o MIDI, ha sido ampliamente aceptado y utilizado por músicos y compositores desde su concepción en 1982. El protocolo MIDI proporciona un medio estandarizado y eficiente de convertir información sobre una interpretación pianística en datos electrónicos. La información MIDI se transmite en mensajes MIDI, un conjunto de instrucciones que informa al sintetizador que tipo de sonido debe generar. Este sintetizador generará el sonido pianístico mediante uno de los métodos de síntesis mencionados anteriormente (síntesis FM, liberación de muestras…). Por tanto, el protocolo MIDI es transparente al medio físico de generación del sonido, simplemente transporta los parámetros necesarios para generar dicho sonido.
El flujo de datos MIDI es un flujo de bits unidireccional y asíncrono a 31.25 Kbps. Con 10 bits transmitidos por byte (un bit de comienzo, 8 bits de datos y un bit de parada). El interfaz en un instrumento MIDI incluye generalmente tres conectores MIDI diferentes denominados IN, OUT y THRU. El flujo de datos MIDI es originado por un controlador MIDI que es el teclado del piano electrónico y es enviado en tiempo real al sintetizador mediante el conector MIDI OUT.
El sintetizador o generador de sonido recibe los mensajes MIDI a través de su conector MIDI IN, y responde a estos mensajes reproduciendo los sonidos correspondientes. En la figura, se muestra un sistema MIDI simple, consistente en un controlador de teclado MIDI y un módulo de sonido MIDI. En los pianos electrónicos comerciales, el instrumento incluye el controlador de teclado y el módulo de sonido MIDI en la misma unidad. En estas unidades, existe por tanto un enlace interno entre el teclado y el módulo de sonido. Muchos modelos permiten habilitar o deshabilitar este enlace configurando la función “control local” del instrumento.
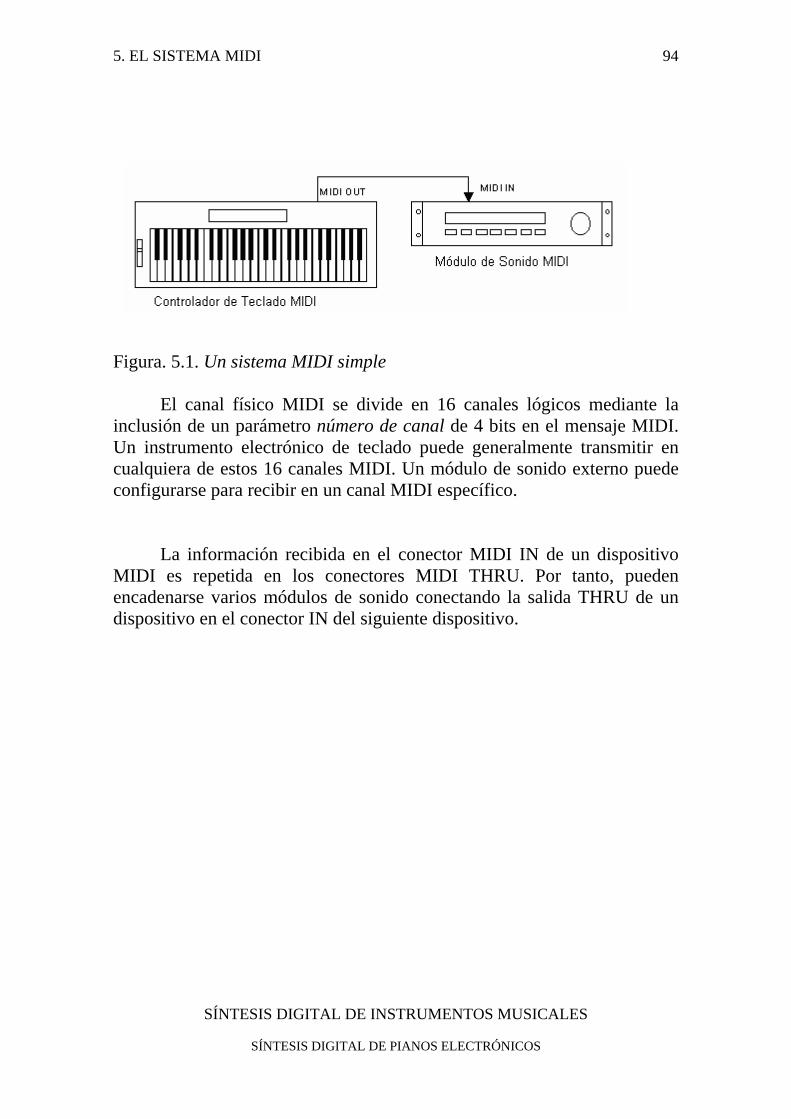
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
94
Figura. 5.1. Un sistema MIDI simple
El canal físico MIDI se divide en 16 canales lógicos mediante la inclusión de un parámetro número de canal de 4 bits en el mensaje MIDI. Un instrumento electrónico de teclado puede generalmente transmitir en cualquiera de estos 16 canales MIDI. Un módulo de sonido externo puede configurarse para recibir en un canal MIDI específico. La información recibida en el conector MIDI IN de un dispositivo MIDI es repetida en los conectores MIDI THRU. Por tanto, pueden encadenarse varios módulos de sonido conectando la salida THRU de un dispositivo en el conector IN del siguiente dispositivo.
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
95
5.2. Mensajes MIDI Un mensaje MIDI está compuesto de un byte de estado seguido generalmente de uno o dos bytes de datos. Existen varios tipos de mensajes MIDI. Al más alto nivel, los mensajes MIDI son clasificados en Mensajes de Canal y Mensajes de Sistema. Los Mensajes de Canal son aquellos que solicitan un canal específico y por tanto el número de canal está incluido en el byte de estado. Los Mensajes de Sistema no hacen referencia a ningún canal específico. Los Mensajes de canal pueden ser además clasificados en Mensajes de Canal de Voz o Mensajes de Modo. Los Mensajes de Canal de Voz contienen los datos de la interpretación pianística y comprenden la mayoría del tráfico en un flujo de datos MIDI típico. Los Mensajes de Modo afectan al modo en que el generador de sonidos responderá a los Mensajes de Voz de Canal. Mensajes de Voz de Canal Los mensajes de Voz de Canal son usados para enviar información sobre la interpretación musical. Los mensajes en esta categoría son Note On, Note Off, Polyphonic Key Pressure, Channel Pressure, Pitch Bend Change, Program Change y Control Change. Note On/ Note Off/ Velocity En los sistemas MIDI, la activación de una nota particular y su liberación son considerados como dos eventos diferentes. Cuando una tecla es presionada en un piano electrónico MIDI, el teclado envía un mensaje Note On o Nota activada por el puerto de salida MIDI OUT. El teclado estará configurado para transmitir en alguno de los 16 canales lógicos MIDI que estará indicado en el byte de estado para el mensaje de Note ON. A este byte de estado le siguen otros dos bytes de datos, que especifican el número de tecla (qué tecla ha sido pulsada) y la velocidad (velocidad con que la tecla fue pulsada). El parámetro Key Number o Número de Tecla es utilizado por el generador de sonido para discriminar la nota que debe ser reproducida, mientras que el parámetro Velocity o Velocidad es normalmente usado para controlar la amplitud de la nota (teniendo en cuenta las variaciones espectrales del timbre con la dinámica en los pianos de gama media y alta). Cuando la tecla es liberada, el teclado envía un mensaje Note Off que
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
96
también incluye dos bytes de datos para el número de tecla y la velocidad con que la tecla fue liberada. Este último parámetro es normalmente ignorado para sonidos pianísticos aunque puede ser no trivial para síntesis de otro tipo de instrumentos musicales. Program Change El mensaje de Program Change o Cambio de Programa es usado para especificar el tipo de instrumento que debería ser usado para reproducir sonidos en un canal dado. Este mensaje necesita solo un byte de datos que especifican el nuevo número de canal. Se utiliza en pianos electrónicos que permiten reproducir distintos tipos de sonidos pianísticos así como distintos instrumentos de teclado (clavicémbalo, órgano…) Control Change Los mensajes de Control Change o cambio de control son usados para controlar una amplia gama de funciones del generador de sonido, Como el resto de los mensajes de canal, solo afectan al número de canal indicado en el byte de estados. En estos mensajes, el byte de estado es seguido por un byte de datos indicando el número de controlador y un segundo byte que especifica el valor de control. El número de controlador identifica que función del generador de sonido será controlado por el mensaje. Bank Select El número de controlador cero, se define como el selector de banco. Esta función es usada en algunos sintetizadores, junto con el mensaje MIDI de cambio de programa para aumentar el número de diferentes sonidos que pueden ser seleccionados (puesto que dicho mensaje permite seleccionar solamente entre 128 números de programa posibles).
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
97
Mensajes de modo de Canal
Los mensajes de modo de canal (números de controlador MIDI 121 a 127) afectan al modo en que el generador de sonido responde a los datos MIDI. El número de controlador 121 se usa para resetear todos los controladores. El número 122 se usa para habilitar o deshabilitar el control local (pudiendo desconectar el teclado del generador de sonido). Los números de controlador del 124 al 127 son usados para seleccionar entre los modos de operación: Omni Mode On/Off y Mono/Poly Mode. Con el Omni Mode activado, el sintetizador responde a los datos MIDI entrantes en todos los canales, cuando está desactivado, solo responde al canal especificado en el parámetro número de canal. Cuando el modo Poly esta seleccionado, los mensajes de Note On o Nota Activa son reproducidos polifónicamente, lo que significa, que cuando se reciben múltiples mensajes Note On, a cada nota se le asigna su propia voz. El resultado es que múltiples notas pueden ser tocadas al mismo tiempo. Si se selecciona el modo Mono, se asigna una sola voz a un canal concreto, de modo que no pueden tocarse acordes, solo melodías lineales. Los pianos comerciales traen ajustados por defecto el modo de operación Omni On y Poly.
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
98
Mensajes de Sistema Los mensajes de sistema se clasifican en mensajes comunes, mensajes en tiempo real, o mensajes exclusivos. Los mensajes comunes de sistema están pensados para todos los receptores en el sistema. Los mensajes en tiempo real son utilizados para sincronización entre componentes MIDI que requieran sincronismo. Los mensajes exclusivos de sistema incluyen un código de identificación (ID) del fabricante y son usados para transferir bytes de datos en el formato especificado por el fabricante correspondiente. Mensajes comunes de Sistema
Los mensajes comunes actualmente definidos incluyen MTC Quarter Frame, Song Select, Song Position Pointer, Tune Request, y End Of Exclusive”.
MTC Quarter Frame
El mensaje MTC Quarter Frame es parte del código MIDI de información temporal, usado para sincronización del equipo MIDI con otros dispositivos como cintas de audio o video. Song Select
El mensaje Song Select se utiliza en secuenciadores MIDI que pueden almacenar y reproducir un cierto número de canciones. Suele utilizarse en pianos comerciales para almacenar canciones de muestra, que puedan reproducirse con el fin de demostrar las cualidades tímbricas del instrumento. Song Position Pointer
El mensaje Song Position Pointer se utiliza para configurar el secuenciador de forma que reproduzca la canción a partir de un instante distinto del inicial. El desfase se indica en número de ciclos de reloj MIDI y por tanto solo puede ser usado con equipamiento que posea sincronismo MIDI, es decir, capaz de reconocer Mensajes MIDI de Tiempo Real. Tune Request
El mensaje Tune Request se utiliza para configurar la frecuencia de los osciladores de un sintetizador analógico. No se utiliza con sintetizadores digitales.
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
99
EOX
El mensaje EOX se utiliza como flag de fin de mensaje, para los mensajes exclusivos del sistema. Mensajes de Sistema en tiempo real
Los mensajes MIDI System Real Time son usados para sincronizar todos los dispositivos MIDI que dependan de una señal de reloj. La mayoría de estos mensajes son normalmente ignorados por instrumentos de teclado y sintetizadores. Para asegurar un sincronismo correcto, estos mensajes tienen prioridad sobre otros, y pueden ocurrir en cualquier lugar en un flujo de datos (p.ej., entre un byte de estado un byte de datos de algún otro mensaje MIDI) Los mensajes en tiempo real son Timing Clock, Start, Continue, Stop, Active Sensing y System Reset. Timing Clock
El mensaje Timing Clock es el reloj maestro que establece el tempo de la reproducción de una secuencia. Este mensaje se envía 24 veces por cuarto de nota. Start, Continue y Stop
Los mensajes Start, Continue y Stop son usados para controlar la reproducción de la secuencia. Active Sensing El Mensaje Active Sensing se utiliza para eliminar “notas atrapadas” que pueden ocurrir si un cable MIDI es desconectado durante la reproducción de una secuencia MIDI. Sin este mensaje, si se interrumpe la conexión, algunas notas podrían reproducirse indefinidamente si se recibiera un mensaje de Note On pero nunca se recibiera el correspondiente mensaje de Note Off. System Reset El mensaje System Reset, se utiliza para resetear e inicializar cualquier dispositivo que reciba el mensaje. Generalmente, este mensaje no es enviado automáticamente, sino que debe ser iniciado manualmente por el usuario.
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
100
Mensajes exclusivos de sistema Los mensajes exclusivos de sistema pueden ser utilizados para enviar
datos como parámetros de ajusto, o datos de muestra entre dispositivos MIDI. Los fabricantes de equipos MIDI definen su propio formato para estos mensajes. Organismos como la MMA o el JMSC garantizan el identificador único para un fabricante, ID que es incluido como parte del mensaje. Dicha ID es seguida por un número indeterminado de bytes de datos y la transmisión finaliza con un mensaje EOX.
Los fabricantes están obligados a publicar los detalles del formato de los mensajes exclusivos del sistema, y otros fabricantes pueden utilizar libremente estos formatos, a condición de que no alteren o utilicen el formato en un modo que entren en conflicto con las especificaciones del fabricante original. Ciertos números de ID se reservan para protocolos especiales. Entre estos, se encuentra el Standard MIDI Simple Dump que es un formato definido en la especificación MIDI para la transmisión de datos entre dispositivos MIDI . Estado de Ejecución
Dado que los datos MIDI se transmiten en serie, es posible que los eventos musicales que originalmente ocurrían al mismo tiempo y deben insertarse en el flujo de datos MIDI, no sean reproducidos exactamente en el mismo tiempo. Con una tasa de transmisión de 31.25 Kbps y 10 bits transmitidos por cada byte de datos MIDI, un mensaje de “Note On” o de “Note Off” de 3 bytes tardaría alrededor de 1 ms en transmitirse, lo cual es suficientemente rápido para que los eventos se perciban como simultáneos. Sin embargo, para un número mayor de acontecimientos simultáneos, pudiera ocurrir que los retrasos introducidos por la serialización de esta información llegaran a ser apreciables. Para reducir la cantidad de datos transmitidos en el flujo MIDI, se emplea una técnica denominada Running Status o Estado de Ejecución.
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
101
Esta técnica tiene en cuenta el siguiente hecho: es muy probable que en una cadena de mensajes consecutivos, la mayoría sean del mismo tipo. Por ejemplo, cuando se toca un acorde, 10 mensajes sucesivos de “Note On” se generan, seguidos de 10 mensajes sucesivos de “Note Off”. Cuando se utiliza el Running Status, un byte de estado es enviado por cada mensaje, solo cuando el mensaje no es del mismo tipo que el último mensaje enviado en el canal. Es decir, el byte de estado para mensajes subsiguientes del mismo tipo son omitidos (solo los bytes de datos son enviados) La efectividad de esta técnica puede acentuarse enviando mensajes Note On con una velocidad cero en lugar de mensajes Note Off. En ese caso, las cadenas contendrían solamente mensajes Note On de los cuales sólo se enviaría el byte de estado para el primero de ellos.
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
102
5.3. Secuenciadores MIDI y Archivos MIDI En un piano electrónico, los mensajes MIDI son recibidos y procesados en un sintetizador MIDI en tiempo real. Cuando el sintetizador recibe un mensaje MIDI de Note on, reproduce el sonido adecuado, y cuando recibe el correspondiente mensaje Note Off, finaliza la reproducción. Si la fuente del flujo MIDI es el teclado, entonces este flujo de datos se genera en tiempo real, y no hay necesidad de enviar información de sincronismo. Sin embargo, la mayoría de pianos comerciales ofrecen la posibilidad de grabar interpretaciones propias para reproducirlas posteriormente. Esto significa, que los datos MIDI deben ser almacenados en un fichero para poder editarse y reproducirse posteriormente por el secuenciador y, por tanto, es necesario algún tipo de información cronológica para los mensajes con el fin de reproducirlos en el orden adecuado. El estándar MIDI proporciona un método para manejar este tipo de datos y un formato de archivo estandarizado que permite no solo la reproducción posterior, sino también la presentación multimedia en software especializado así como la extracción de la partitura de una interpretación grabada. La especificación para los ficheros MIDI estándar define tres formatos. El Formato 0 almacena toda la secuencia de datos MIDI en una pista única. El Formato 1 almacena la secuencia en una colección de pistas. El Formato 2 puede almacenar varios patrones independientes. Este último formato no se utiliza generalmente con secuenciadores MIDI para aplicaciones musicales. Los secuenciadotes MIDI más sofisticados manejan tanto el Formato 0 como el 1. Los ficheros MIDI 0 suelen ser más pequeños, y por consiguiente reducen el tamaño en memoria y pueden ser transmitidos en un menor ancho de banda. Sin embargo, los ficheros MIDI 1 pueden ser visualizados y editados de forma más directa y por consiguiente son preferidos para la edición de partituras.
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
103
Aspectos básicos del sintetizador Polifonía El término polifonía de un generador de sonido se refiere a la habilidad de reproducir más de una nota al mismo tiempo. La polifonía se especifica generalmente mediante el número de notas o voces. Inicialmente, la mayoría de los sintetizadores eran monofónicos, lo que significa que podían reproducir únicamente una nota a la vez. Los módulos actuales suele oscilar entre 16, 24 o 32 notas de polifonía. Sonidos Los diferentes sonidos que un sintetizador puede generar son llamados patches, programs o más genéricamente timbre. Los sintetizadores programables pueden asignar números de programa a cada sonido. Por ejemplo, el módulo de sonido de un piano comercial podría usar el patch número 1 para sonidos de piano, el número 2 para clavicémbalo, el número 3 para órgano… La asociación de cada número de programa o “match” a cada sonido es a menudo denominada patch map A través de MIDI, un mensaje de cambio de programa, puede utilizarse para indicar el cambio de sonido usado a un dispositivo recibiendo en un canal concreto Modo Multitímbrico Se entiende por sintetizador, o generador de sonido multitímbrico, aquel capaz de producir dos o más sonidos de diferentes instrumentos simultáneamente. En los pianos comerciales, existe la posibilidad de separar el teclado en dos áreas, cada una de las cuales toca un instrumento concreto (p.ej un bajo acústico en la región inferior y un sonido de piano en la región superior). La polifonía de un sintetizador multitímbrico se asigna dinámicamente entre los diferentes timbres usados.
5. EL SISTEMA MIDI
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
104
5.4. Sistema General Midi(GM) Al comienzo de cualquier secuencia MIDI, normalmente se envía un mensaje de cambio de programa en cada canal usado en la secuencia para configurar el sonido del instrumento apropiado para cada parte. El mensaje de cambio de programa informa al sintetizador sobre el número de patch para cada canal. Para que se reproduzcan los sonidos deseados, el match map o asignación de números de match a sonidos debe ser la misma en emisor y en receptor. Anteriormente al desarrollo del sistema general MIDI, no existía un estándar para la relación entre números de match y sonidos específicos. Por consiguiente, una secuencia MIDI podría producir sonidos de diferentes instrumentos al reproducirse en diferentes generadores. La especificación general MIDI (GM) define un conjunto general de capacidades para instrumentos MIDI típicos. El GM incluye la definición de un patch map. Los canales 1-9 y 11-16 están reservados para instrumentos cromáticos, mientras que el canal 10 se utiliza para instrumentos de percusión. Para sonidos de instrumentos en los canales 1-9 y 11-16 el parámetro número del mensaje Note On se utiliza para determinar la altura del sonido. Para sonidos en el canal 10, este parámetro se utiliza para seleccionar el sonido del instrumento de percusión a reproducir. El GM especifica los sonidos usando los números de programa del 1 al 128. El mensaje de cambio de programa usa por tanto un 8 bits, lo que proporciona un rango del 0 al 127, lo que significa que para seleccionar el sonido número 10, tendremos que especificar el número de programa 9. El GM especifica que instrumento o sonido corresponde con cada número de programa, pero no especifica como son generados dichos sonidos, ya que MIDI es sólo un protocolo de comunicación, no un método de síntesis.
6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
105
6. Efectos de sonido comunes En la mayoría de los pianos electrónicos comerciales de gama media y alta, incluso en los instrumentos más elaborados orientados a una interpretación musical seria podemos encontrar funciones que implementan efectos de sonido que se añaden al sonido del instrumento. Estos efectos pueden ser de origen natural, como la reverberación existente en cualquier sala de conciertos o bien más artificiosos como los efectos típicos denominados chorus o flanging por citar algunos. En lo que respecta a la materia de este estudio, estos efectos suelen implementarse en el mismo proceso de síntesis o bien en módulos independientes que utilizan las mismas técnicas estudiadas en el capítulo 4 y es por ello que se incluyen en este trabajo. Cuando se implementan en el mismo módulo generador de sonido, los efectos se consiguen ajustando o modificando alguno de los parámetros de síntesis, o bien, introduciendo un elemento perturbador, que convenientemente ajustado, logre el efecto deseado. Cuando se implementan como módulos independientes, como es el caso para los pianos de gama media y alta, suelen utilizarse sobre todo modelos físicos, ya que el análisis espectral necesario para sintetizarlos con modelos de señal suele ser complicado, mientras que los mecanismos físicos que intervienen en su gestación suelen ser de naturaleza sencilla y por tanto fácilmente implementable.
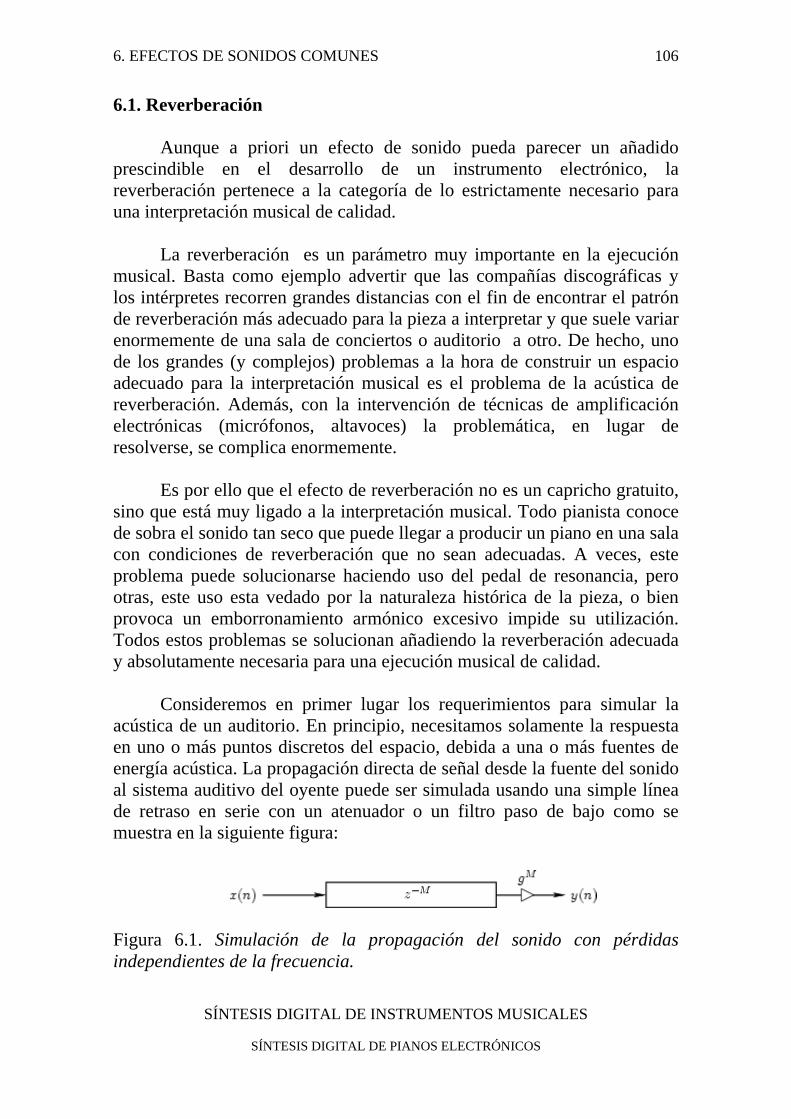
6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
106
6.1. Reverberación Aunque a priori un efecto de sonido pueda parecer un añadido prescindible en el desarrollo de un instrumento electrónico, la reverberación pertenece a la categoría de lo estrictamente necesario para una interpretación musical de calidad. La reverberación es un parámetro muy importante en la ejecución musical. Basta como ejemplo advertir que las compañías discográficas y los intérpretes recorren grandes distancias con el fin de encontrar el patrón de reverberación más adecuado para la pieza a interpretar y que suele variar enormemente de una sala de conciertos o auditorio a otro. De hecho, uno de los grandes (y complejos) problemas a la hora de construir un espacio adecuado para la interpretación musical es el problema de la acústica de reverberación. Además, con la intervención de técnicas de amplificación electrónicas (micrófonos, altavoces) la problemática, en lugar de resolverse, se complica enormemente. Es por ello que el efecto de reverberación no es un capricho gratuito, sino que está muy ligado a la interpretación musical. Todo pianista conoce de sobra el sonido tan seco que puede llegar a producir un piano en una sala con condiciones de reverberación que no sean adecuadas. A veces, este problema puede solucionarse haciendo uso del pedal de resonancia, pero otras, este uso esta vedado por la naturaleza histórica de la pieza, o bien provoca un emborronamiento armónico excesivo impide su utilización. Todos estos problemas se solucionan añadiendo la reverberación adecuada y absolutamente necesaria para una ejecución musical de calidad. Consideremos en primer lugar los requerimientos para simular la acústica de un auditorio. En principio, necesitamos solamente la respuesta en uno o más puntos discretos del espacio, debida a una o más fuentes de energía acústica. La propagación directa de señal desde la fuente del sonido al sistema auditivo del oyente puede ser simulada usando una simple línea de retraso en serie con un atenuador o un filtro paso de bajo como se muestra en la siguiente figura: Figura 6.1. Simulación de la propagación del sonido con pérdidas independientes de la frecuencia.
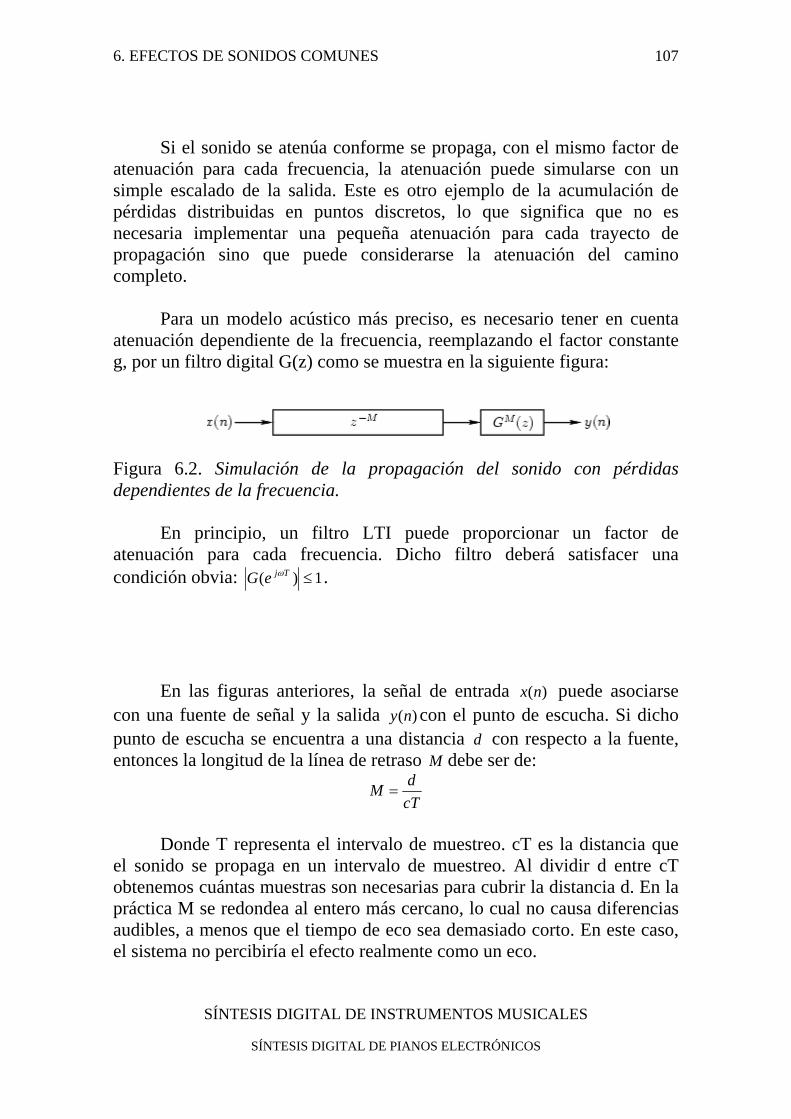
6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
107
Si el sonido se atenúa conforme se propaga, con el mismo factor de atenuación para cada frecuencia, la atenuación puede simularse con un simple escalado de la salida. Este es otro ejemplo de la acumulación de pérdidas distribuidas en puntos discretos, lo que significa que no es necesaria implementar una pequeña atenuación para cada trayecto de propagación sino que puede considerarse la atenuación del camino completo. Para un modelo acústico más preciso, es necesario tener en cuenta atenuación dependiente de la frecuencia, reemplazando el factor constante g, por un filtro digital G(z) como se muestra en la siguiente figura: Figura 6.2. Simulación de la propagación del sonido con pérdidas dependientes de la frecuencia. En principio, un filtro LTI puede proporcionar un factor de atenuación para cada frecuencia. Dicho filtro deberá satisfacer una condición obvia: 1)( ≤TjeG ω .
En las figuras anteriores, la señal de entrada )(nx puede asociarse con una fuente de señal y la salida )(ny con el punto de escucha. Si dicho punto de escucha se encuentra a una distancia d con respecto a la fuente, entonces la longitud de la línea de retraso M debe ser de:
cTdM =
Donde T representa el intervalo de muestreo. cT es la distancia que el sonido se propaga en un intervalo de muestreo. Al dividir d entre cT obtenemos cuántas muestras son necesarias para cubrir la distancia d. En la práctica M se redondea al entero más cercano, lo cual no causa diferencias audibles, a menos que el tiempo de eco sea demasiado corto. En este caso, el sistema no percibiría el efecto realmente como un eco.
6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
108
En cuanto a la atenuación g, la teoría acústica nos dice que un punto sonoro produce una onda esférica en un medio isotrópico como el aire. Por tanto, el sonido de cualquier superficie radiante puede calcularse como la suma de contribuciones de onda esférica desde cada punto en la superficie. (principio de Huygens). En una primera aproximación, la energía de la onda se conserva en su propagación a través del aire. En una onda esférica de presión de radio r, la energía del frente de onda se distribuye a lo largo de la superficie esférica 24 rπ . Por tanto, la energía por unidad de área de una onda esférica decrece con radio 21 r . Dado que la energía es proporcional al cuadrado de la amplitud, una ley de inversa con el cuadrado para la energía se traduce en una ley r1 para la amplitud. Por tanto el factor de atenuación g debe variar con la inversa de la distancia. Sin embargo, la atenuación del sonido por la distribución esférica no es la única fuente de pérdidas. En un modelo más realista deben tenerse en cuenta las pérdidas por absorción. En medios como el aire, la absorción varía con la frecuencia, donde las altas frecuencias suelen sufrir más atenuación que las bajas. Asimismo, la propagación en cuerdas vibrantes presenta una pérdida por absorción análoga. Denotando g(r,w) el factor de pérdidas asociado a una distancia r a una frecuencia w, bajo condiciones uniformes, la cantidad de atenuación es proporcional a la distancia recorrida, lo que significa que los factores de atenuación para dos segmentos de propagación consecutivos son multiplicativos:
),(),(),( 2121 wrgwrgwrrg =+ (6.1) Esta propiedad implica que la atenuación g es una función exponencial de la distancia r. Además de la atenuación dependiente de la frecuencia, los filtros LTI pueden proporcionar un retraso dependiente de la frecuencia.
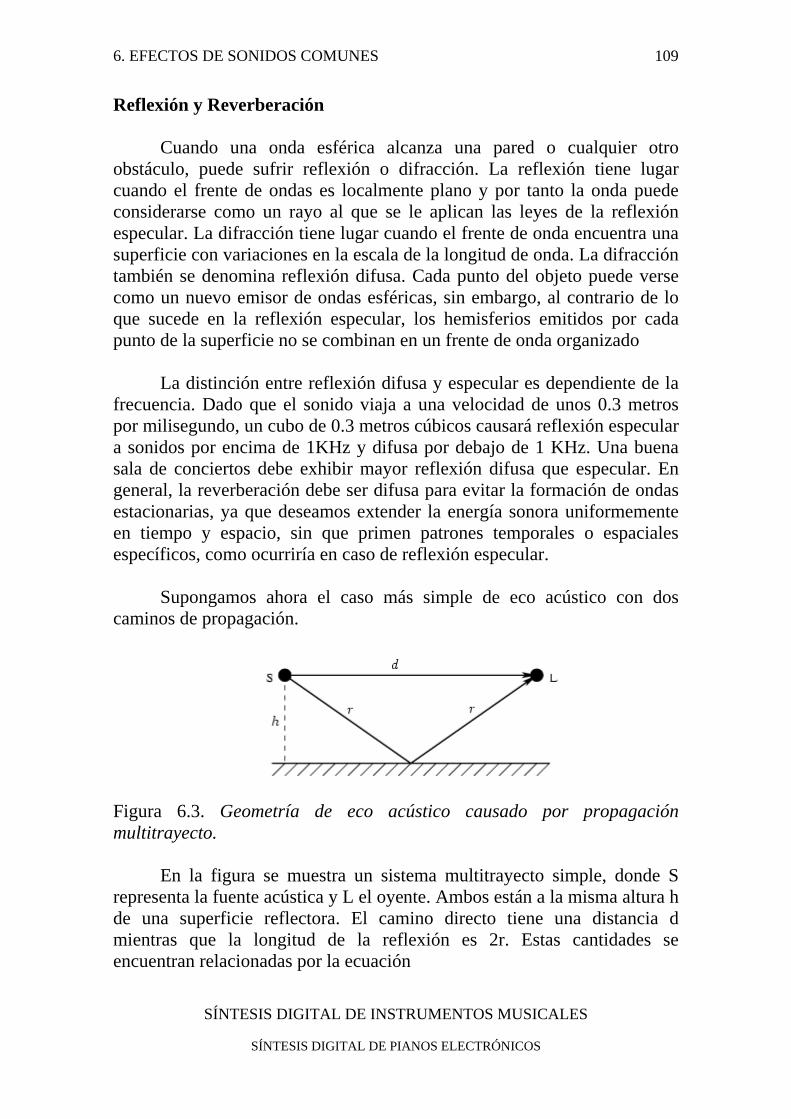
6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
109
Reflexión y Reverberación Cuando una onda esférica alcanza una pared o cualquier otro obstáculo, puede sufrir reflexión o difracción. La reflexión tiene lugar cuando el frente de ondas es localmente plano y por tanto la onda puede considerarse como un rayo al que se le aplican las leyes de la reflexión especular. La difracción tiene lugar cuando el frente de onda encuentra una superficie con variaciones en la escala de la longitud de onda. La difracción también se denomina reflexión difusa. Cada punto del objeto puede verse como un nuevo emisor de ondas esféricas, sin embargo, al contrario de lo que sucede en la reflexión especular, los hemisferios emitidos por cada punto de la superficie no se combinan en un frente de onda organizado La distinción entre reflexión difusa y especular es dependiente de la frecuencia. Dado que el sonido viaja a una velocidad de unos 0.3 metros por milisegundo, un cubo de 0.3 metros cúbicos causará reflexión especular a sonidos por encima de 1KHz y difusa por debajo de 1 KHz. Una buena sala de conciertos debe exhibir mayor reflexión difusa que especular. En general, la reverberación debe ser difusa para evitar la formación de ondas estacionarias, ya que deseamos extender la energía sonora uniformemente en tiempo y espacio, sin que primen patrones temporales o espaciales específicos, como ocurriría en caso de reflexión especular. Supongamos ahora el caso más simple de eco acústico con dos caminos de propagación. Figura 6.3. Geometría de eco acústico causado por propagación multitrayecto. En la figura se muestra un sistema multitrayecto simple, donde S representa la fuente acústica y L el oyente. Ambos están a la misma altura h de una superficie reflectora. El camino directo tiene una distancia d mientras que la longitud de la reflexión es 2r. Estas cantidades se encuentran relacionadas por la ecuación
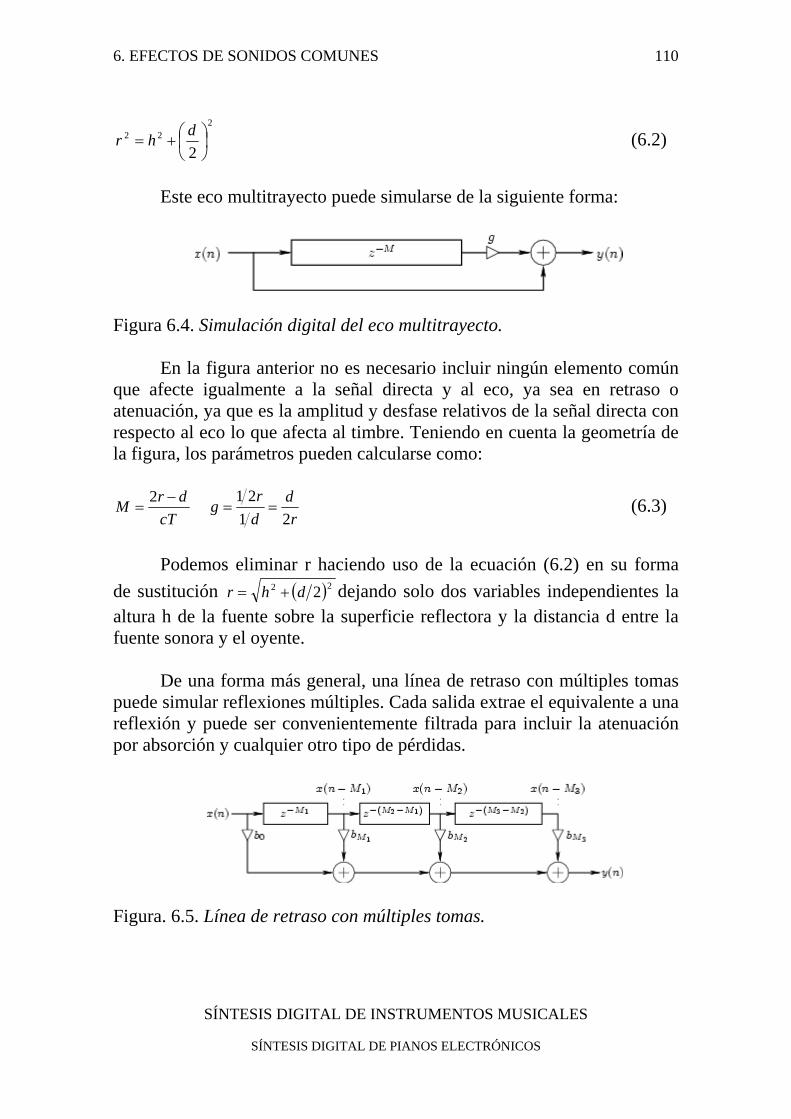
6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
110
2
22
2⎟⎠⎞
⎜⎝⎛+=
dhr (6.2)
Este eco multitrayecto puede simularse de la siguiente forma: Figura 6.4. Simulación digital del eco multitrayecto. En la figura anterior no es necesario incluir ningún elemento común que afecte igualmente a la señal directa y al eco, ya sea en retraso o atenuación, ya que es la amplitud y desfase relativos de la señal directa con respecto al eco lo que afecta al timbre. Teniendo en cuenta la geometría de la figura, los parámetros pueden calcularse como:
cTdrM −
=2
rd
dr
g21
21== (6.3)
Podemos eliminar r haciendo uso de la ecuación (6.2) en su forma de sustitución ( )22 2dhr += dejando solo dos variables independientes la altura h de la fuente sobre la superficie reflectora y la distancia d entre la fuente sonora y el oyente. De una forma más general, una línea de retraso con múltiples tomas puede simular reflexiones múltiples. Cada salida extrae el equivalente a una reflexión y puede ser convenientemente filtrada para incluir la atenuación por absorción y cualquier otro tipo de pérdidas. Figura. 6.5. Línea de retraso con múltiples tomas.
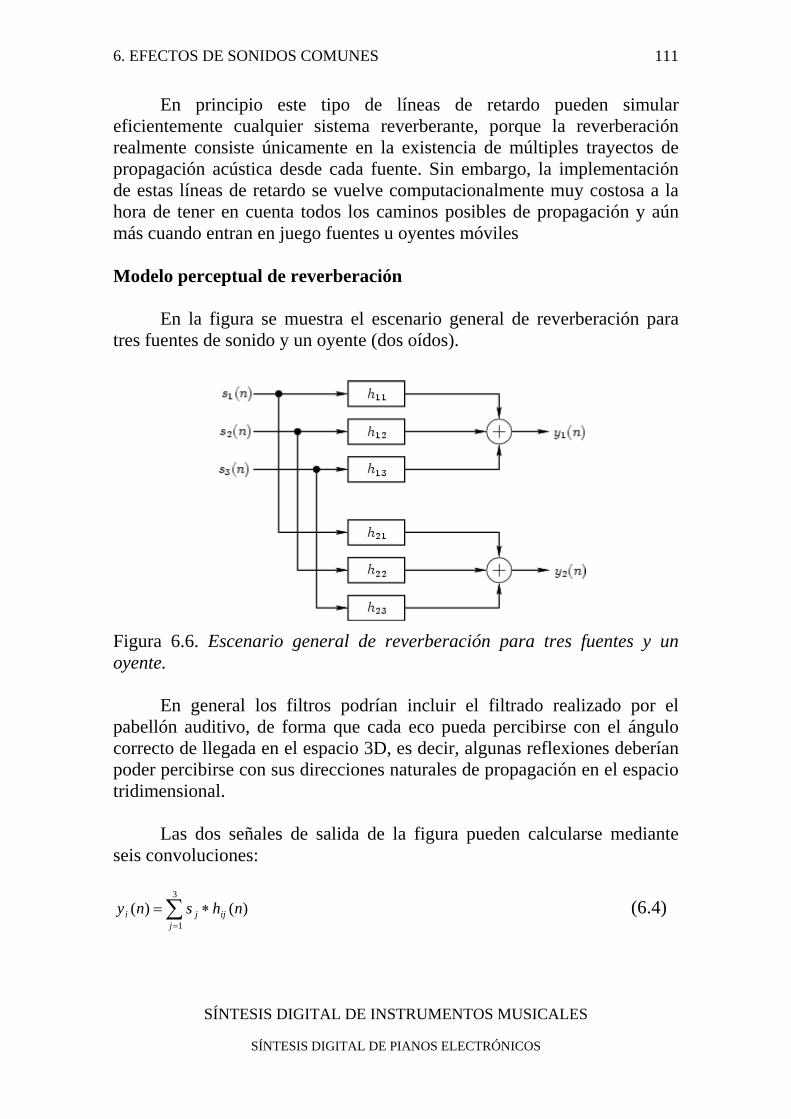
6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
111
En principio este tipo de líneas de retardo pueden simular eficientemente cualquier sistema reverberante, porque la reverberación realmente consiste únicamente en la existencia de múltiples trayectos de propagación acústica desde cada fuente. Sin embargo, la implementación de estas líneas de retardo se vuelve computacionalmente muy costosa a la hora de tener en cuenta todos los caminos posibles de propagación y aún más cuando entran en juego fuentes u oyentes móviles Modelo perceptual de reverberación En la figura se muestra el escenario general de reverberación para tres fuentes de sonido y un oyente (dos oídos). Figura 6.6. Escenario general de reverberación para tres fuentes y un oyente. En general los filtros podrían incluir el filtrado realizado por el pabellón auditivo, de forma que cada eco pueda percibirse con el ángulo correcto de llegada en el espacio 3D, es decir, algunas reflexiones deberían poder percibirse con sus direcciones naturales de propagación en el espacio tridimensional. Las dos señales de salida de la figura pueden calcularse mediante seis convoluciones:
∑=
∗=3
1)()(
jijji nhsny (6.4)
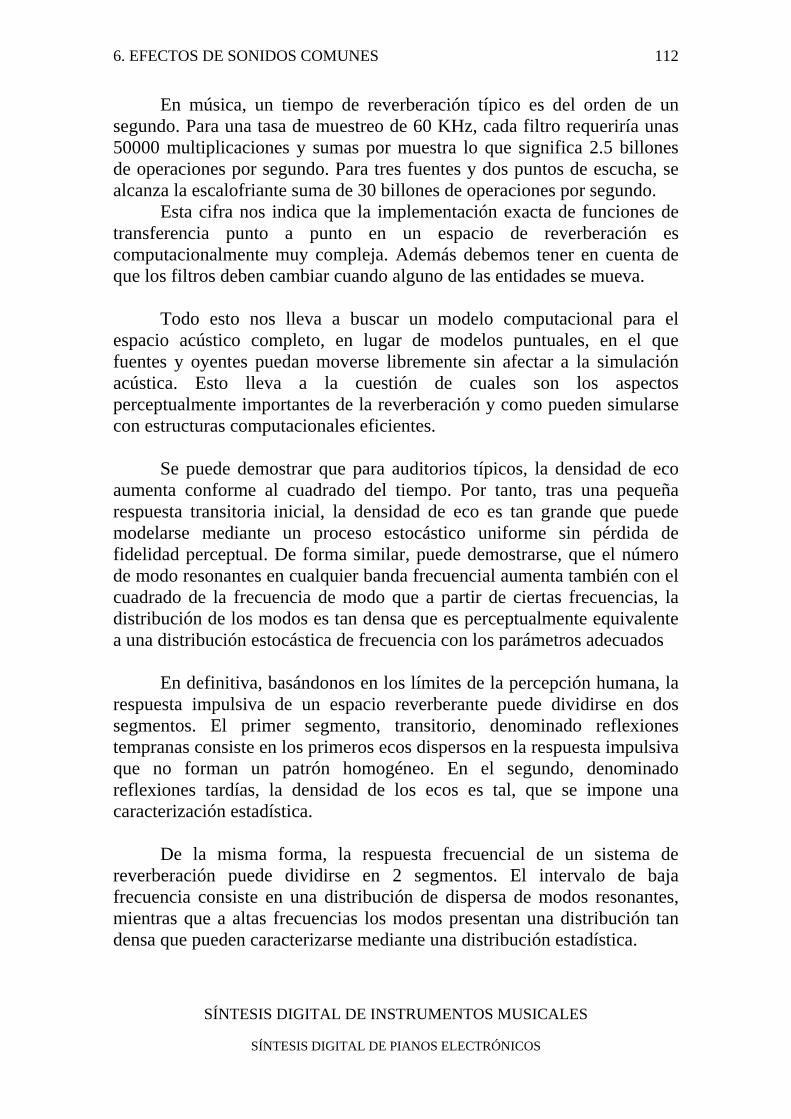
6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
112
En música, un tiempo de reverberación típico es del orden de un segundo. Para una tasa de muestreo de 60 KHz, cada filtro requeriría unas 50000 multiplicaciones y sumas por muestra lo que significa 2.5 billones de operaciones por segundo. Para tres fuentes y dos puntos de escucha, se alcanza la escalofriante suma de 30 billones de operaciones por segundo.
Esta cifra nos indica que la implementación exacta de funciones de transferencia punto a punto en un espacio de reverberación es computacionalmente muy compleja. Además debemos tener en cuenta de que los filtros deben cambiar cuando alguno de las entidades se mueva. Todo esto nos lleva a buscar un modelo computacional para el espacio acústico completo, en lugar de modelos puntuales, en el que fuentes y oyentes puedan moverse libremente sin afectar a la simulación acústica. Esto lleva a la cuestión de cuales son los aspectos perceptualmente importantes de la reverberación y como pueden simularse con estructuras computacionales eficientes. Se puede demostrar que para auditorios típicos, la densidad de eco aumenta conforme al cuadrado del tiempo. Por tanto, tras una pequeña respuesta transitoria inicial, la densidad de eco es tan grande que puede modelarse mediante un proceso estocástico uniforme sin pérdida de fidelidad perceptual. De forma similar, puede demostrarse, que el número de modo resonantes en cualquier banda frecuencial aumenta también con el cuadrado de la frecuencia de modo que a partir de ciertas frecuencias, la distribución de los modos es tan densa que es perceptualmente equivalente a una distribución estocástica de frecuencia con los parámetros adecuados
En definitiva, basándonos en los límites de la percepción humana, la respuesta impulsiva de un espacio reverberante puede dividirse en dos segmentos. El primer segmento, transitorio, denominado reflexiones tempranas consiste en los primeros ecos dispersos en la respuesta impulsiva que no forman un patrón homogéneo. En el segundo, denominado reflexiones tardías, la densidad de los ecos es tal, que se impone una caracterización estadística.
De la misma forma, la respuesta frecuencial de un sistema de reverberación puede dividirse en 2 segmentos. El intervalo de baja frecuencia consiste en una distribución de dispersa de modos resonantes, mientras que a altas frecuencias los modos presentan una distribución tan densa que pueden caracterizarse mediante una distribución estadística.
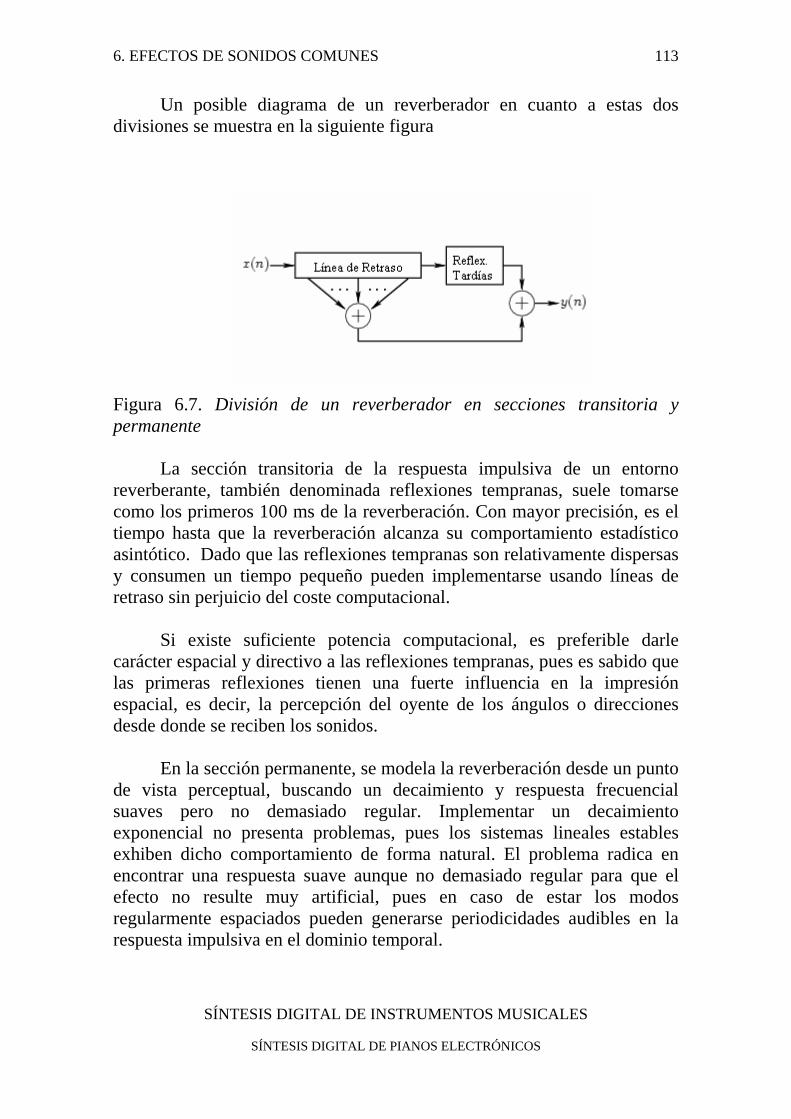
6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
113
Un posible diagrama de un reverberador en cuanto a estas dos divisiones se muestra en la siguiente figura Figura 6.7. División de un reverberador en secciones transitoria y permanente
La sección transitoria de la respuesta impulsiva de un entorno
reverberante, también denominada reflexiones tempranas, suele tomarse como los primeros 100 ms de la reverberación. Con mayor precisión, es el tiempo hasta que la reverberación alcanza su comportamiento estadístico asintótico. Dado que las reflexiones tempranas son relativamente dispersas y consumen un tiempo pequeño pueden implementarse usando líneas de retraso sin perjuicio del coste computacional.
Si existe suficiente potencia computacional, es preferible darle carácter espacial y directivo a las reflexiones tempranas, pues es sabido que las primeras reflexiones tienen una fuerte influencia en la impresión espacial, es decir, la percepción del oyente de los ángulos o direcciones desde donde se reciben los sonidos. En la sección permanente, se modela la reverberación desde un punto de vista perceptual, buscando un decaimiento y respuesta frecuencial suaves pero no demasiado regular. Implementar un decaimiento exponencial no presenta problemas, pues los sistemas lineales estables exhiben dicho comportamiento de forma natural. El problema radica en encontrar una respuesta suave aunque no demasiado regular para que el efecto no resulte muy artificial, pues en caso de estar los modos regularmente espaciados pueden generarse periodicidades audibles en la respuesta impulsiva en el dominio temporal.
6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
114
Una señal que satisface las características anteriormente mencionadas puede ser un ruido coloreado con decaimiento exponencial, y con un factor de decaimiento de energía mayor a altas frecuencias que a bajas. Un valor típico de densidad en la respuesta de reverberación tardía puede ser de 1000 ecos por segundo, aunque para sonidos muy impulsivos se necesitan casi 10000 ecos para lograr una respuesta suave. Algunos parámetros de control deseables en un módulo de reverberación incluyen:
)(60 ft que es el tiempo de reverberación a cada frecuencia f y se define como el tiempo que tarda en decaer la amplitud en 60 dB.
)(2 fG o ganancia de potencia de señal a cada frecuencia )( fC o claridad que se define como el cociente de energía entre las
reflexiones tempranas y tardías. )( fρ o coeficiente inter-aural entre oídos izquierdo y derecho.
Otras implementaciones Una implementación con filtros pasa todo se debe a M. R. Schroeder, quien en su trabajo Colorless Artificial Reverberation, sugiere el uso de filtros pasa todo para implementar algoritmos de reverberación. Estos elementos continúan siendo la base de dispositivos comerciales de reverberación. La idea del uso de filtro pasa-todo es especialmente brillante ya que no hay nada en la naturaleza del fenómeno de reverberación que sugiera su uso. Un diagrama básico de un modelo de reverberación puede verse en la siguiente figura: Figura 6.8. Cascada de tres secciones pasa-todo. Cada filtro pasa todo puede interpretarse como un elemento que expande cada muestra de entrada no nula en una repuesta impulsiva infinita. Aunque no es un modelo físico de reflexión difusa, las reflexiones simples son extendidas en un conjunto de reflexiones, que es cualitativamente lo que deseamos.
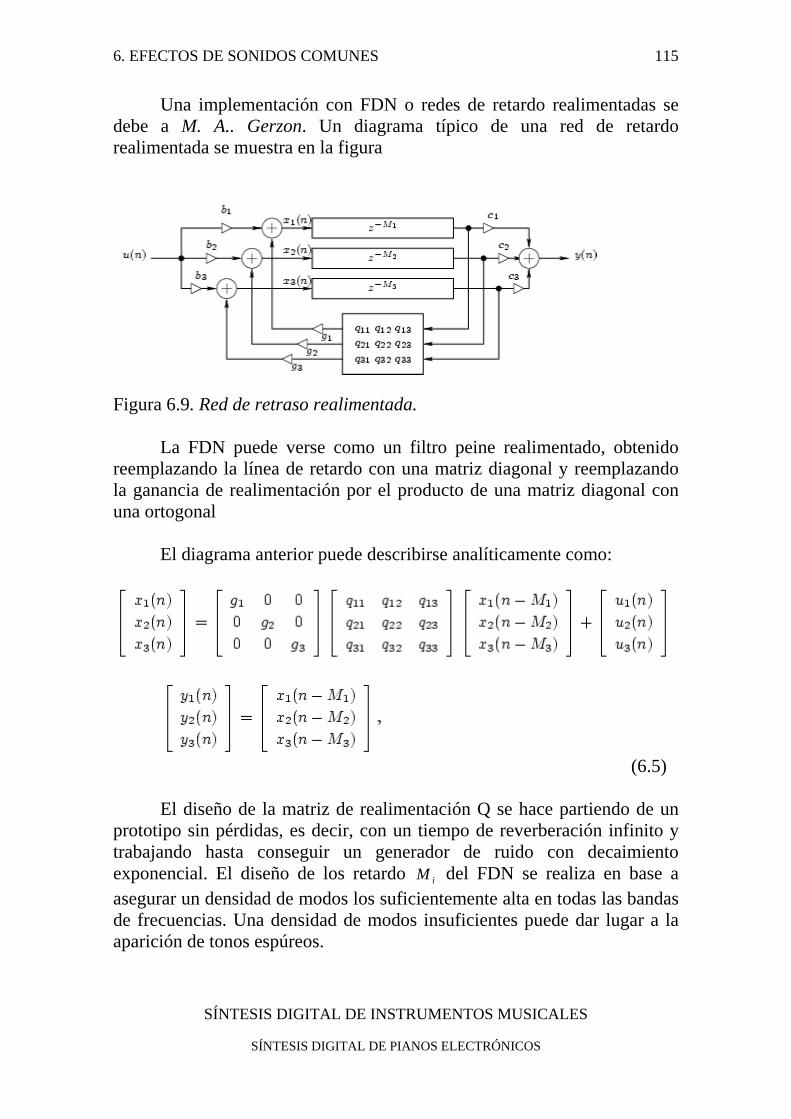
6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
115
Una implementación con FDN o redes de retardo realimentadas se debe a M. A.. Gerzon. Un diagrama típico de una red de retardo realimentada se muestra en la figura
Figura 6.9. Red de retraso realimentada. La FDN puede verse como un filtro peine realimentado, obtenido reemplazando la línea de retardo con una matriz diagonal y reemplazando la ganancia de realimentación por el producto de una matriz diagonal con una ortogonal El diagrama anterior puede describirse analíticamente como:
(6.5)
El diseño de la matriz de realimentación Q se hace partiendo de un
prototipo sin pérdidas, es decir, con un tiempo de reverberación infinito y trabajando hasta conseguir un generador de ruido con decaimiento exponencial. El diseño de los retardo iM del FDN se realiza en base a asegurar un densidad de modos los suficientemente alta en todas las bandas de frecuencias. Una densidad de modos insuficientes puede dar lugar a la aparición de tonos espúreos.

6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
116
Una regla empírica para fijar dichos retrasos es utilizar el camino medio libre o mean free path. Dicho parámetro se define como la distancia media que un rayo de sonido viaja antes de encontrar un obstáculo y reflejarse. Un valor aproximado del parámetro para un auditorio convencional puede estimarse como:
SVd 4= (6.6)
Donde V es el volumen de la habitación y S la superficie total
encerrada. Esta aproximación requiere la hipótesis de campo difuso, es decir, que las ondas planas viajan aleatoriamente en cualquier dirección y por tanto solo es válida para reverberaciones tardías. El valor de los retrasos puede hallarse utilizando este valor según:
∑=
=N
iiM
NcTd
1
1 (6.7)
Donde c denota la velocidad del sonido y T el período de muestreo.
El valor obtenido debe tomarse como cota inferior para los retrasos, pues en salas reales las reflexiones son a menudo difusas especialmente a altas frecuencias.

6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
117
6.2. Otros efectos
Vibrato El término vibrato hace pequeñas variaciones cuasi-periódicas en el pitch o frecuencia fundamental de un tono. Este efecto es musicalmente muy importante en los instrumentos de cuerda frotada y en la voz humana. En los instrumentos de cuerda frotada, el vibrato se produce haciendo vibrar el dedo que sostiene el tono en el diapasón y en la voz humana se consigue modulando la tensión de las cuerdas vocales. El vibrato suele ir acompañado del trémolo que consiste en una modulación en amplitud a la misma frecuencia que el vibrato que lo causa. Para aplicar vibrato a un sonido, es necesario aplicar un salto de frecuencia cuasi-periódico. Esto puede implementarse usando una línea de retraso variable que introduce un efecto Doppler que puede interpretarse musicalmente como un vibrato, es decir una pequeña modulación en frecuencia. Si llamamos x(t) a la entrada a una línea de retraso variable, la salida puede escribirse como:
)()( tDtxty −= (6.8) Donde tD representa el retraso variable en tiempo. En implementaciones discretas cuando tD no es un múltiplo entero del intervalo de muestreo, )( tDtx − puede aproximarse siguiendo algún método de interpolación. Analicemos ahora el salto en frecuencia causado por un retraso variable en tiempo para una sinusoide compleja de frecuencia sω ,
tj setx =)( La salida es ahora
)()()( ts DtjeDttxty −=−= ω (6.9)
La frecuencia instantánea de esta señal es
)1( tsl Ddtd
−=ωω (6.10)
6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
118
Por tanto, la tasa de crecimiento del retraso proporciona el salto relativo en frecuencia:
s
lstD
dtd
ωωω −
= (6.11)
Comparamos ahora esta ecuación con la ecuación del efecto Doppler para un sistema de fuente-receptor
cvc
v
sl
ls
sl
−
+=
1
1ωω (6.12)
Donde sω es la frecuencia emitida por la fuente en reposo, lω es la frecuencia percibida por el oyente, lsv representa la velocidad del oyente relativa al medio en dirección a la fuente y slv simboliza la velocidad de la fuente relativa al medio en dirección al oyente. Como resultado de la comparación, encontramos que el retraso variable simula naturalmente un efecto Doppler causado por un oyente móvil con velocidad
tls Ddtd
cv 1
−= (6.13)
Es decir, que la velocidad de variación del retraso, provoca un efecto análogo a un movimiento relativo entre fuente sonora y oyente, lo que a su vez provoca el efecto vibrato buscado Chorus El efecto chorus o choralizer consiste en un procesamiento de señal que consigue a partir de una sola fuente sonora, muchas fuentes sonoras sonando al unísono. Este efecto es muy interesante a la hora de sintetizar el sonido de una sección de cuerdas a partir de la muestra de un único instrumento de la sección. Dado que la ejecución al unísono nunca es exacta (si lo fuera solo tendríamos un aumento del amplitud de la fuente sonora inicial, pero no cambiaría su cualidad tímbrica), el efecto chorus se simula sumando copias con modificaciones independientes entre sí. Dichas

6. EFECTOS DE SONIDOS COMUNES
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
119
modificaciones pueden incluir retrasos, saltos en frecuencia y/o modulación en amplitud.
El efecto chorus suele implementarse usando líneas de retraso variable con múltiples tomas de señal. Dichas salidas pueden oscilar respecto a su posición consiguiendo introducir una cierta aleatoriedad que da la cualidad natural necesaria a una sección de instrumentos tocando al unísono.
7. EVOLUCIÓN Y FUTURO DE LAS TÉCNICAS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
120
7. Evolución y futuro de las técnicas de síntesis. Historia de la Síntesis de Sonidos Musicales La historia de la síntesis artificial de sonidos musicales se remonta a fechas tan tempranas como 1860, año en que Helmholtz, pionero en el uso de dispositivos eléctricos para generar sonidos, diseña un conjunto de osciladores electromecánicos. Estos dispositivos generaban sonidos simples senoidales, es decir tonos puros. En 1897, Thaddeus Cahill desarrolla un sistema de generación de sonido electrónico denominado Dynamophone o Telharmonium. El instrumento se basaba en el uso de dinamos modificadas eléctricamente, produciendo corrientes alternas de diferentes audiofrecuencias. Estas señales pasaban mediante un teclado y un panel de control a una serie de receptores telefónicos provistos de tonos acústicos especiales. El aparato completo pesaba acerca de unas 200 toneladas con una longitud de casi 20 metros. En 1920, Leon Theremin, inventa y desarrolla un instrumento musical electrónico, el Theramín, que se controla mediante la posición de las manos del intérprete. Este instrumento generaba un sonido abstracto, no encontrado en la naturaleza, que cautivó a algunos compositores los cuales incluso llegaron a escribir algunas obras para dicho instrumento en concreto.
El piano Neo-Bechstein inventado en 1931, era todavía un piano
acústico modificado para capturar las vibraciones producidas naturalmente y someterlas a modificaciones y amplificaciones electrónicas
El primer intento más serio de un instrumento electrónico llega con el Órgano Hammond, que aparece en 1935 de mano de Laurens Hammond y gana rápidamente un puesto de honor en la historia de los instrumentos musicales sintéticos por su peculiar, aunque no enteramente auténtica, calidad del sonido. El principio de generación del sonido se basaba en la rotación de piezas circulares en un campo magnético y utilizaba técnicas de síntesis aditiva.
7. EVOLUCIÓN Y FUTURO DE LAS TÉCNICAS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
121
Como los primeros osciladores de Helmholtz, todos estos sintetizadores pioneros eran sintetizadores analógicos. Con la llegada de los transistores electrónicos en 1950, la tecnología controlada por tensión revoluciona las técnicas de síntesis.
Basándose en esta nueva tecnología, Harald Bode desarrolla el Melochord en 1961, el primer sintetizador controlado por tensión. En 1964 Robert Moog y Donald Buchla desarrollan independientemente las primeras versiones comerciales de sintetizadores electrónicos.
En los años 70, el aumento de la demanda provoca el nacimiento de nuevas compañías dedicadas a la síntesis de sonido, alguna de las cuales llega hasta nuestros días como Oberheim, E-mu y Roland Corporation. En 1960, John Chowning comienza a investigar detalladamente las características de los sonidos de frecuencia modulada usando síntesis computacional, pero no es hasta 1973, con la aparición de su famoso trabajo Síntesis de espectros complejos de audio mediante Modulación en Frecuencia, cuando se presta atención a la posibilidad de sintetizar timbres instrumentales con la adecuada combinación de parámetros FM. En 1976 aparecen los primeros instrumentos Yamaha basados en esta técnica de síntesis. En 1975 y paralelamente, la New England Digital Corporation, produce el prototipo de un sintetizador digital, comercializado posteriormente con el nombre de Synclavier, un o de los más avanzados comparados con sus antecesores.
En 1979, se introduce en el mercado el Fairlight CMI, primer instrumento con teclado de 6 octavas y controles de pedal. Permitía diferentes tipos de síntesis como síntesis aditiva, sustractiva e incluso PCM.
En el mismo año, Digital Music Systems produce el primer chip integrado para síntesis de sonido el DMX-1000, a partir de este momento las tecnologías LSI (Large Scale Integration), han reducido estos DSPs al tamaño de un chip de silicio, apareciendo instrumentos mucho más eficientes y flexibles. Además, en 1982 se especifica el protocolo MIDI lo que permite una implementación más portable. Durante la década de los 80 aparecen los instrumentos electrónicos Casio y Kawai que acaparan el mercado de los sintetizadores de gama media.
7. EVOLUCIÓN Y FUTURO DE LAS TÉCNICAS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
122
En esta década, los grandes avances en tecnología digital producen
modelos de síntesis más realistas y baratos. Durante esta década, el avance más significativo en los modelos de síntesis viene marcado por la evolución de las tarjetas de sonido de los PCs. Desde las primeras tarjetas que aparecen en el mercado como la AdLib o la SoundBlaster que implementan síntesis FM, la tecnología de las tarjetas comienza a orientarse hacia la síntesis PCM como la Turtle Beach Multisound o la Gravis Ultrasound (GUS), primer intento de fabricar un sampler para el mercado doméstico.
En la década de los 90, los modelos computacionalmente más
costosos como los modelos físicos, comienzan a ser realizables y comercializables a nivel de usuario. El primer sintetizador comercial que implementa esta tecnología es desarrollado por Yamaha en 1971, tras un acuerdo con la universidad de Stanford, pionera en el desarrollo de la síntesis por guiaonda digital. El sintetizador recibe el nombre de Yamaha VL1.
7. EVOLUCIÓN Y FUTURO DE LAS TÉCNICAS DE SÍNTESIS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
123
Futuro de los modelos de síntesis Un ordenador convenientemente programado, es virtualmente capaz de producir cualquier sonido imaginable, familiar o inaudito. La dificultad consiste en decirle como hacerlo o en describir de alguna forma, el sonido que buscamos. Los nuevos métodos de síntesis sonora, tienden por ello a ser más sofisticados en sus posibilidades, pero buscan interfaces de control más intuitivos. En cualquier caso, el problema del uso de CPUs para síntesis de instrumentos es el problema de no poder trabajar en tiempo real. Sin embargo, la creciente potencia de los procesadores actuales va a cambiar en breve este panorama, con la implantación de métodos de síntesis por software en tiempo real. Actualmente, existen ya en el mercado varios programas para PC, que emulan por software (y por una décima parte de su precio en hardware) las prestaciones de sintetizadores profesionales y que, lo único que requieren es el conversor D/A que se encuentra en cualquier tarjeta de sonido de 16 bits. Así que es posible vaticinar que el futuro de los métodos de síntesis se encamina hacia la síntesis por software y es posible que los futuros instrumentos electrónicos sean una especie de pequeños ordenadores procesando los algoritmos de síntesis más complejos que se pueda imaginar.
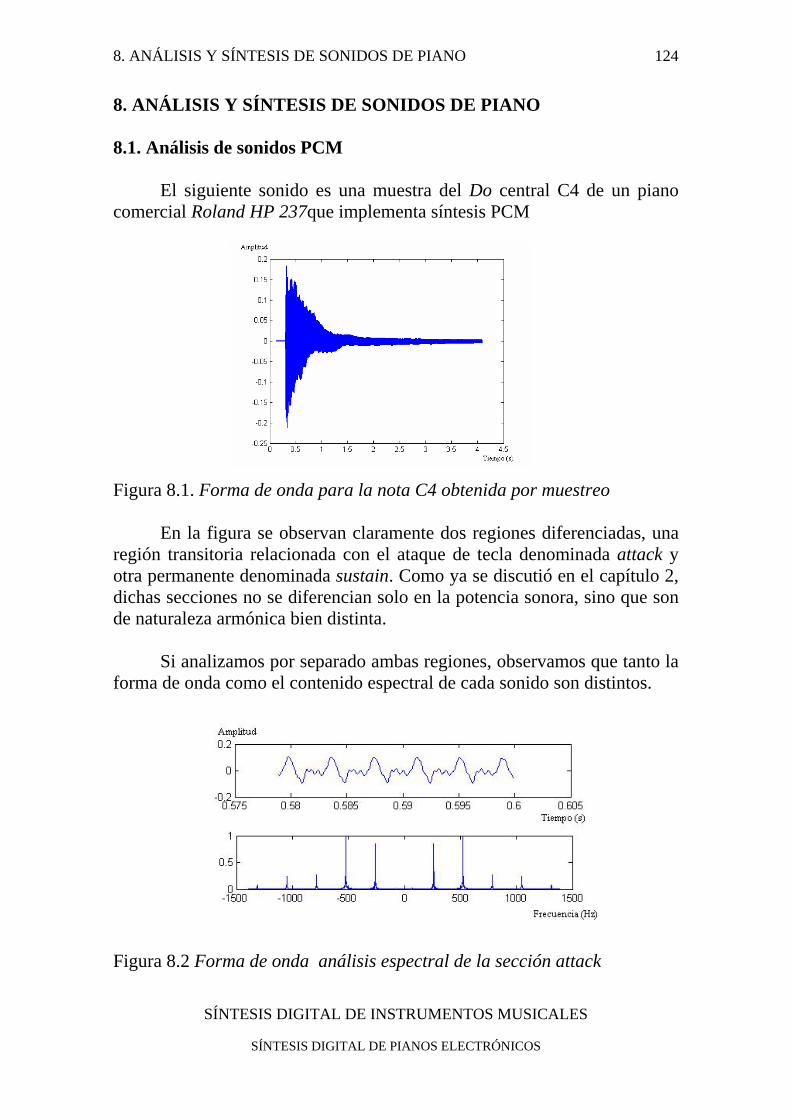
8. ANÁLISIS Y SÍNTESIS DE SONIDOS DE PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
124
8. ANÁLISIS Y SÍNTESIS DE SONIDOS DE PIANO 8.1. Análisis de sonidos PCM El siguiente sonido es una muestra del Do central C4 de un piano comercial Roland HP 237que implementa síntesis PCM Figura 8.1. Forma de onda para la nota C4 obtenida por muestreo
En la figura se observan claramente dos regiones diferenciadas, una región transitoria relacionada con el ataque de tecla denominada attack y otra permanente denominada sustain. Como ya se discutió en el capítulo 2, dichas secciones no se diferencian solo en la potencia sonora, sino que son de naturaleza armónica bien distinta.
Si analizamos por separado ambas regiones, observamos que tanto la forma de onda como el contenido espectral de cada sonido son distintos. Figura 8.2 Forma de onda análisis espectral de la sección attack
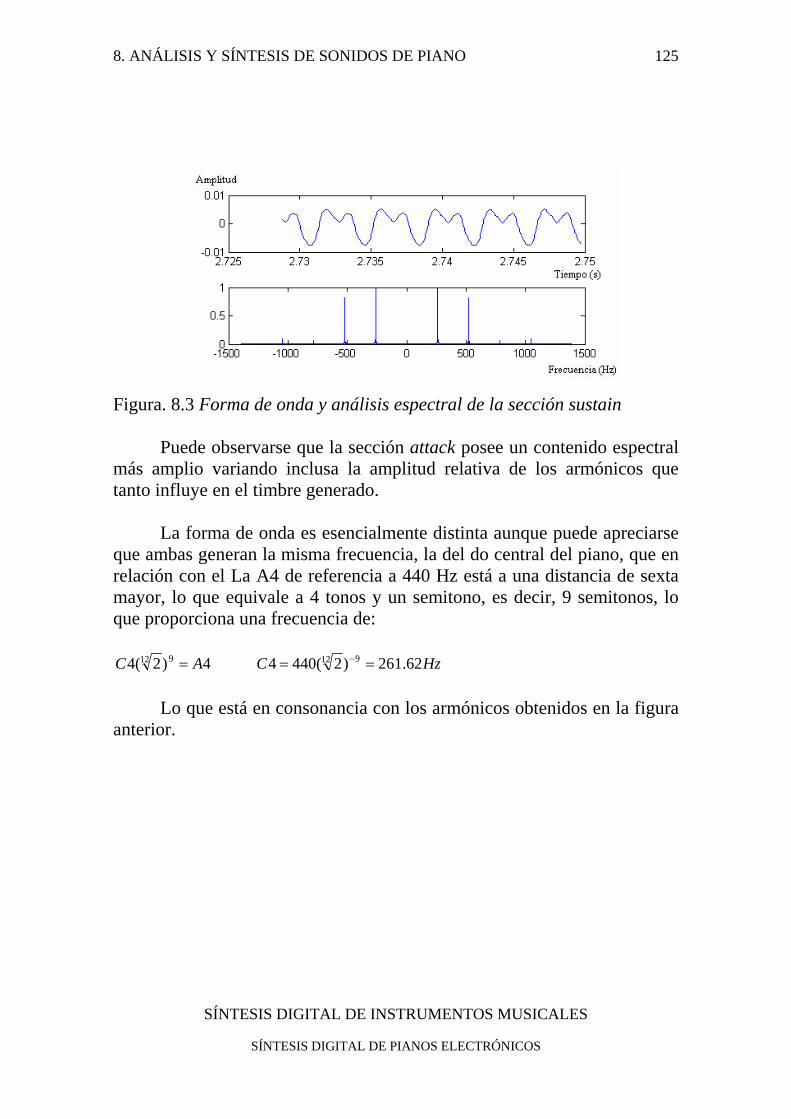
8. ANÁLISIS Y SÍNTESIS DE SONIDOS DE PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
125
Figura. 8.3 Forma de onda y análisis espectral de la sección sustain Puede observarse que la sección attack posee un contenido espectral más amplio variando inclusa la amplitud relativa de los armónicos que tanto influye en el timbre generado.
La forma de onda es esencialmente distinta aunque puede apreciarse que ambas generan la misma frecuencia, la del do central del piano, que en relación con el La A4 de referencia a 440 Hz está a una distancia de sexta mayor, lo que equivale a 4 tonos y un semitono, es decir, 9 semitonos, lo que proporciona una frecuencia de:
4)2(4 912 AC = HzC 62.261)2(4404 912 == − Lo que está en consonancia con los armónicos obtenidos en la figura anterior.
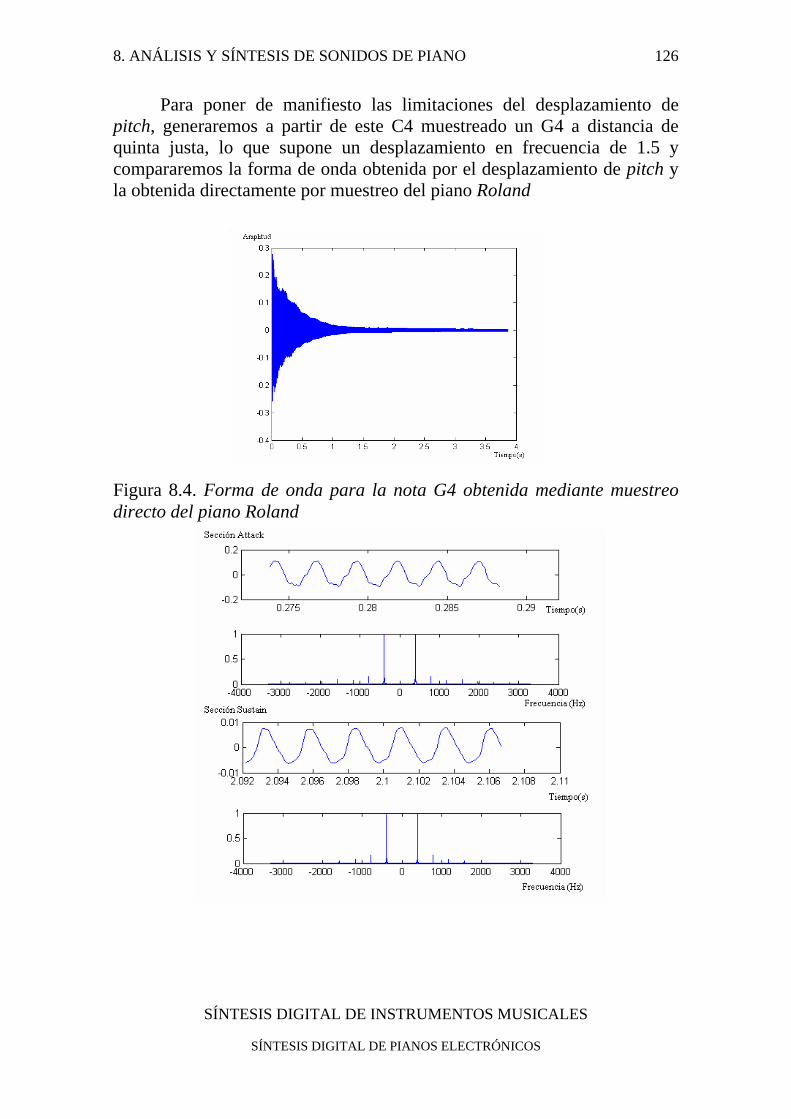
8. ANÁLISIS Y SÍNTESIS DE SONIDOS DE PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
126
Para poner de manifiesto las limitaciones del desplazamiento de pitch, generaremos a partir de este C4 muestreado un G4 a distancia de quinta justa, lo que supone un desplazamiento en frecuencia de 1.5 y compararemos la forma de onda obtenida por el desplazamiento de pitch y la obtenida directamente por muestreo del piano Roland Figura 8.4. Forma de onda para la nota G4 obtenida mediante muestreo directo del piano Roland
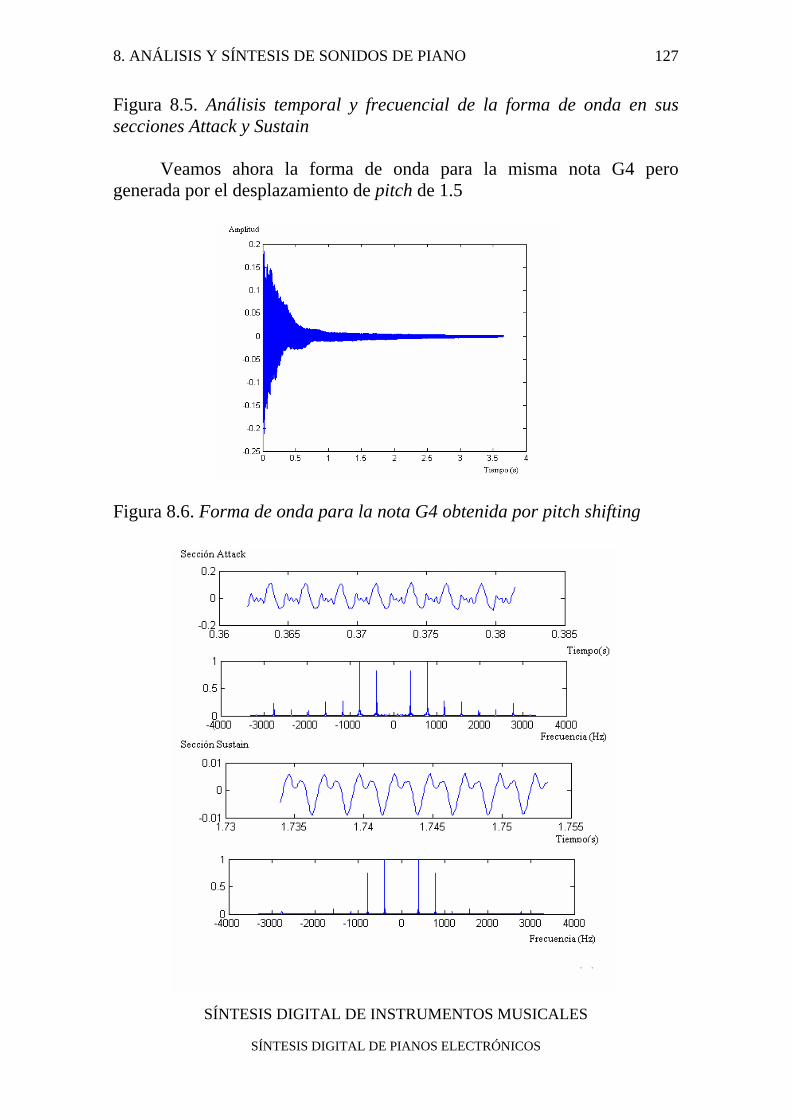
8. ANÁLISIS Y SÍNTESIS DE SONIDOS DE PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
127
Figura 8.5. Análisis temporal y frecuencial de la forma de onda en sus secciones Attack y Sustain Veamos ahora la forma de onda para la misma nota G4 pero generada por el desplazamiento de pitch de 1.5 Figura 8.6. Forma de onda para la nota G4 obtenida por pitch shifting
8. ANÁLISIS Y SÍNTESIS DE SONIDOS DE PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
128
Figura 8.7. Análisis temporal y frecuencial de la forma de onda. Como puede observarse comparando las figuras 8.5. y 8.7., las formas de onda son esencialmente diferentes. La forma de onda obtenida por pitch shifting no es más que la compresión en tiempo de la forma de onda de la nota C4 y por consiguiente la dilatación en frecuencia del espectro de la nota C4 representado en las figuras 8.2. y 8.3.
Cuando el desplazamiento de pitch es de unos pocos semitonos, la diferencia entre los espectros no es audible. Pero para este caso, 9 semitonos, el tono generado tendrá un sonido metálico desagradable que no puede utilizarse para una interpretación musical artística.
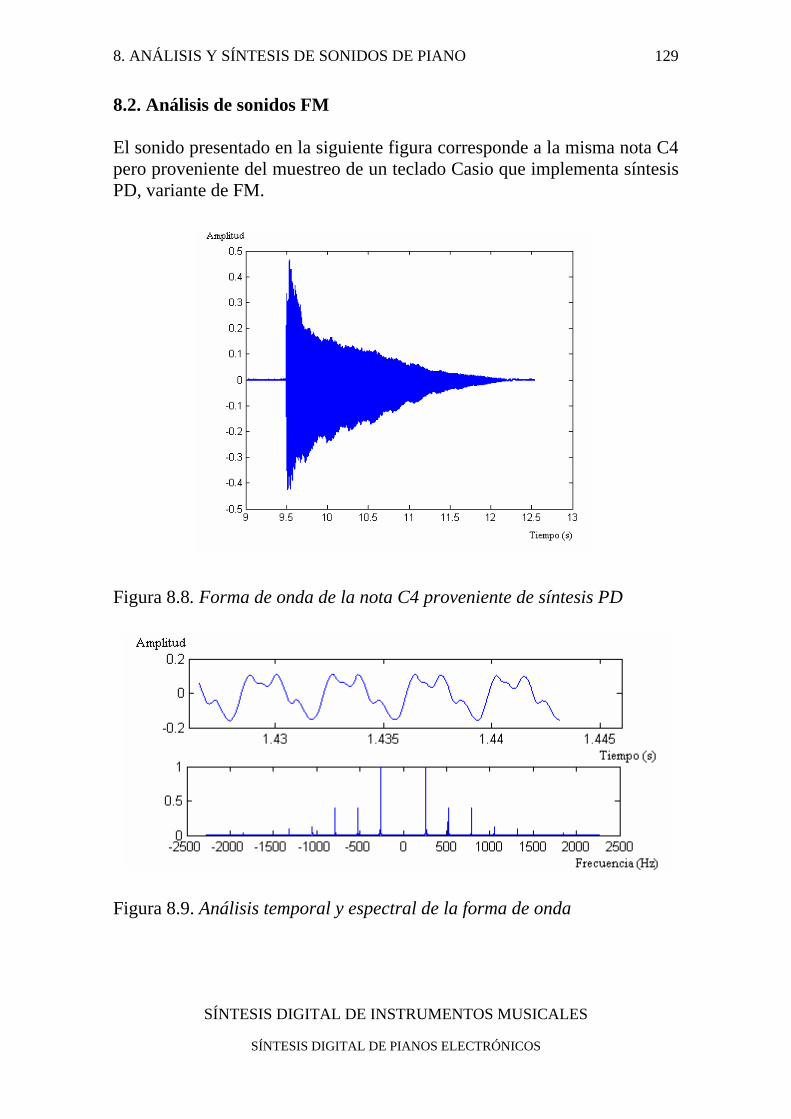
8. ANÁLISIS Y SÍNTESIS DE SONIDOS DE PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
129
8.2. Análisis de sonidos FM El sonido presentado en la siguiente figura corresponde a la misma nota C4 pero proveniente del muestreo de un teclado Casio que implementa síntesis PD, variante de FM. Figura 8.8. Forma de onda de la nota C4 proveniente de síntesis PD
Figura 8.9. Análisis temporal y espectral de la forma de onda
8. ANÁLISIS Y SÍNTESIS DE SONIDOS DE PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
130
Como puede observarse, en el caso de síntesis PD, la sección attack y sustain solo presentan diferencias de amplitud y en la envolvente, pero no en la forma de onda que es exactamente la misma. Esto hace que el sonido generado no presenta tanta naturalidad. Sin embargo, la comparación entre los dos análisis espectrales, muestra que la síntesis es bastante acertada. De hecho la audición de ambos sonidos muestra que el resultado de la síntesis PD, presenta cualidades muy agradables al oído.
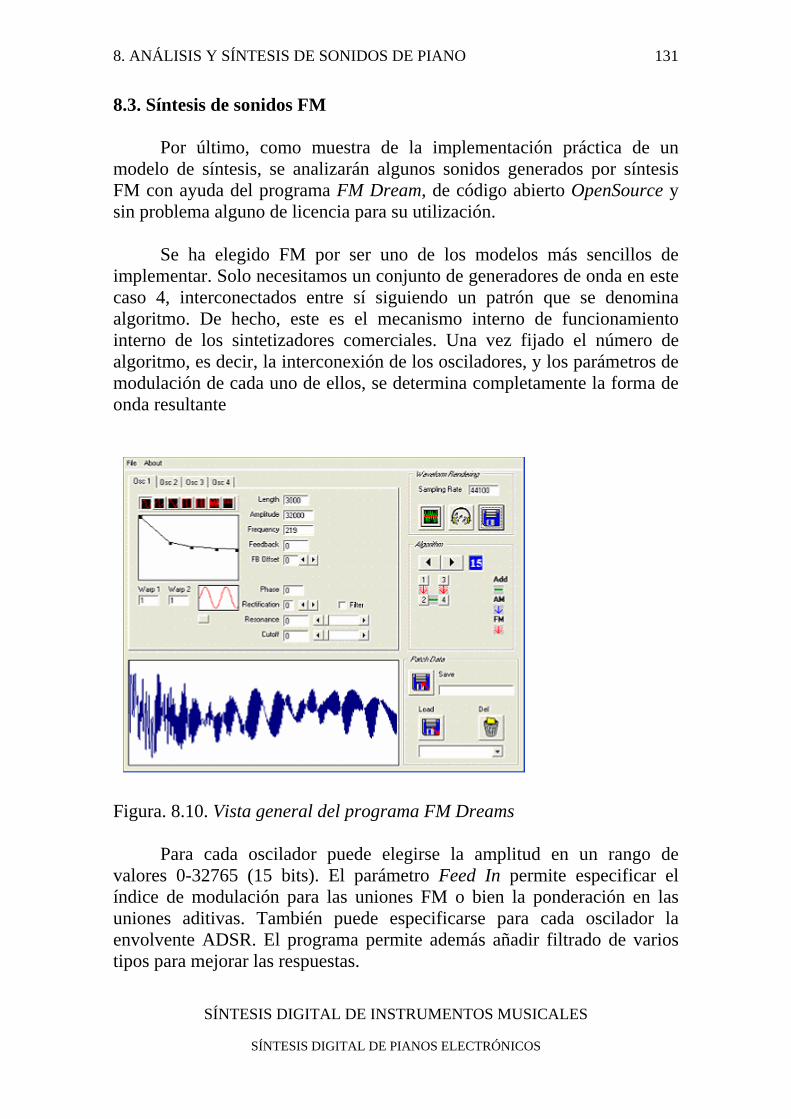
8. ANÁLISIS Y SÍNTESIS DE SONIDOS DE PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
131
8.3. Síntesis de sonidos FM Por último, como muestra de la implementación práctica de un modelo de síntesis, se analizarán algunos sonidos generados por síntesis FM con ayuda del programa FM Dream, de código abierto OpenSource y sin problema alguno de licencia para su utilización. Se ha elegido FM por ser uno de los modelos más sencillos de implementar. Solo necesitamos un conjunto de generadores de onda en este caso 4, interconectados entre sí siguiendo un patrón que se denomina algoritmo. De hecho, este es el mecanismo interno de funcionamiento interno de los sintetizadores comerciales. Una vez fijado el número de algoritmo, es decir, la interconexión de los osciladores, y los parámetros de modulación de cada uno de ellos, se determina completamente la forma de onda resultante
Figura. 8.10. Vista general del programa FM Dreams Para cada oscilador puede elegirse la amplitud en un rango de valores 0-32765 (15 bits). El parámetro Feed In permite especificar el índice de modulación para las uniones FM o bien la ponderación en las uniones aditivas. También puede especificarse para cada oscilador la envolvente ADSR. El programa permite además añadir filtrado de varios tipos para mejorar las respuestas.
8. ANÁLISIS Y SÍNTESIS DE SONIDOS DE PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
132
Con este ejemplo de síntesis se ponen de manifiesto el principal inconveniente a la hora de usar un modelo no lineal, es decir, la falta de relación directa observable causa-efecto. Debido a las relaciones complejas y no-lineales que intervienen en la formación del espectro FM, el cambio uniforme de los parámetros, no asegura la variación uniforme del espectro en un único sentido, lo que hace de FM un método fundamentalmente heurístico y empírico. En definitiva, por ensayo-error y variando los parámetros del modelo, se obtuvieron algunos sonidos interesantes que se asemejan a un sonido de piano. Por comparación directa de los espectros resultante y deseado, se obtuvieron para el piano los siguientes parámetros:
2.185220220
%100
1
1
1
1
=→====
βIHzfHzf
A
m
c
1.150
440220
%50
2
2
2
2
=→====
βIHzfHzf
A
m
c
Donde 1A y 2A se refieren a la ponderación de la unión aditiva (línea continua en el dibujo) mientras que 2211 ,,, cmcm ffff corresponden a los osciladores 1, 2, 3 y 4 respectivamente. Para el segundo oscilador se eligió una frecuencia moduladora que fuera múltiplo de la frecuencia de la nota a generar La-3 a 220 Hz. Se observaron mejores resultados ajustando la frecuencia moduladora a un múltiplo mayor, más allá del armónico 10, como 2860 ó 3080 Hz, para tener mayor riqueza espectral.
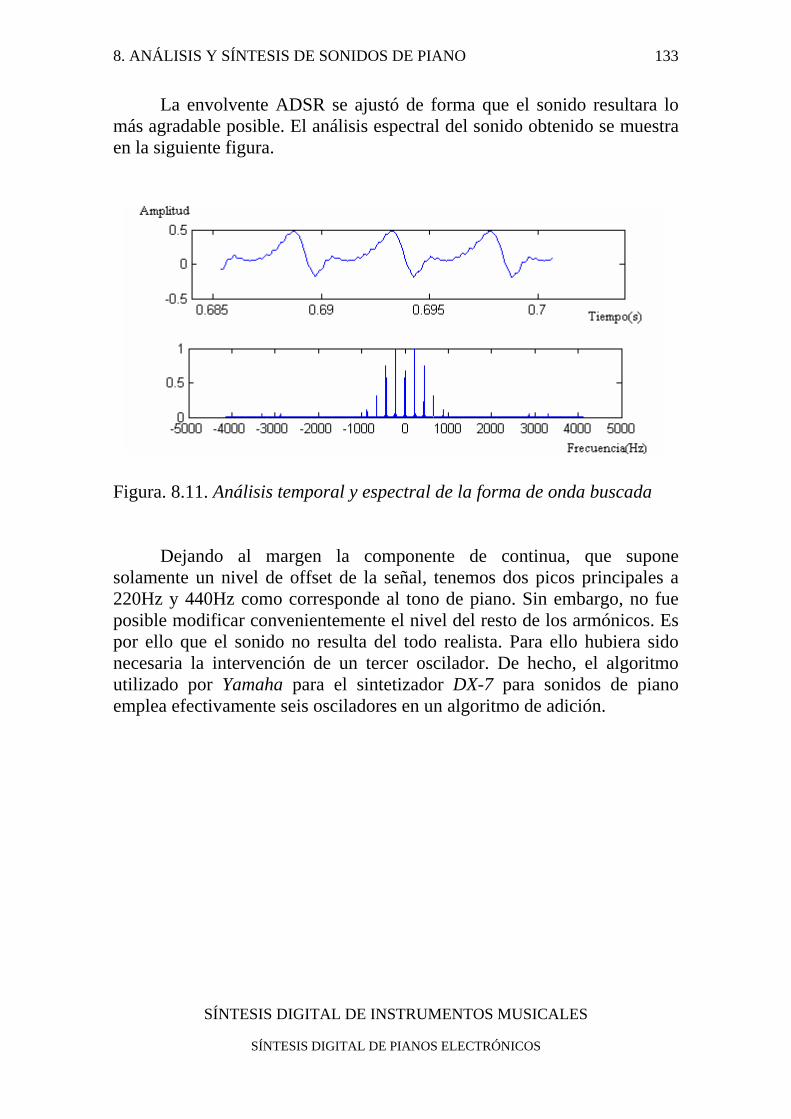
8. ANÁLISIS Y SÍNTESIS DE SONIDOS DE PIANO
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
133
La envolvente ADSR se ajustó de forma que el sonido resultara lo más agradable posible. El análisis espectral del sonido obtenido se muestra en la siguiente figura.
Figura. 8.11. Análisis temporal y espectral de la forma de onda buscada Dejando al margen la componente de continua, que supone solamente un nivel de offset de la señal, tenemos dos picos principales a 220Hz y 440Hz como corresponde al tono de piano. Sin embargo, no fue posible modificar convenientemente el nivel del resto de los armónicos. Es por ello que el sonido no resulta del todo realista. Para ello hubiera sido necesaria la intervención de un tercer oscilador. De hecho, el algoritmo utilizado por Yamaha para el sintetizador DX-7 para sonidos de piano emplea efectivamente seis osciladores en un algoritmo de adición.

BIBLIOGRAFÍA
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
134
BIBLIOGRAFIA Askenfelt A., ed., “Five Lectures on the Acoustics of the Piano,” Stockholm: Royal Swedish Academy of Music, 1990, Bate J., "The Effects of Modulator Phase on Timbres in FM Synthesis," Computer Music Journal 14(3), 1990. Bristow-Johnson R., “Wavetable Synthesis, A Fundamental Perspective”, Wave Mechanics, Inc. Chiantore L.. “Historia de la Técnica Pianística”, Alianza Editorial, 2001 Chowning J., "The Synthesis of Complex Audio Spectra by Means of Frequency Modulation," Journal of the Audio Engineering Society 21(7), 1973; reprinted in Computer Music Journal 1(2), 1977. De Furia S. y ScaciaFerro J. “The Midi Resource Book”, Third Earth Publishing Inc. 1987 Hiller L. y Ruiz P., “Synthesizing Musical Sounds by Solving the Wave Equation for Vibrating Objects”, Journal of the Audio Engineering Society, 1971. Karplus K. y Strong A., “Digital Synthesis of Plucked-String und Drum Timbres”, Computer Music Journal, 1983 Piston W., “Armonía”, SpanPress Universitaria, 1998 Serra X. and Smith J.O., “Spectral modeling synthesis: a sound analysis/synthesis system based on a deterministic plus stochastic decomposition”, Computer Music Journal, 1990. Smith J.O., “Music applications of digital waveguides”, Technical Report STANM-39 CCRMA. Smith J.O., “Viewpoints on the story of digital synthesis”, Proceedings of the International Computer Music Conference
BIBLIOGRAFÍA
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
135
Smith J.O., “Physical modeling using diigtal waveguides”, Computer Music Journal Smyth T., “Fundamentals of Computerized Sound”, Computing Science, Simon Fraser University Essays Online Truax B., "Organizational Techniques for C:M Ratios in Frequency Modulation", Computer Music Journal, 1(4), 1978, pp. 39-45; reprinted in Foundations of Computer Music, C. Roads and J. Strawn (eds.). MIT Press, 1985. “Acoustical Society of America, Publications” http://asa.aip.org/publications.html “Harmony Central: The Keyboards and Synths Database”, http://harmonycentral.com/Synth/Data/ “Music DSP Source Code Archive”, http://musicdsp.org/ Smith J.O., “Physical Audio Signal Processing Digital Waveguide Modeling of Musical Instruments and Audio Effects” http://ccrma.stanford.edu/~jos/waveguide/waveguide.html
APÉNDICE
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
136
APÉNDICE En el apéndice se incluyen los códigos Matlab necesarios para el análisis temporal y frecuencial así como para el mecanismo de desplazamiento de pitch de la síntesis PCM. Cortar.m %Funcion utilizada para seleccionar una seccion concreta % de una funcion utilizando el raton. % Devuelve tanto el intervalo temporal seleccionado como los valores function [tc,Yc]=cortar(Y,Fs) Ts=1/Fs; t=0:Ts:(length(Y)-1)*Ts; plot(t,Y); Ts=1/Fs; p=ginput(2); Yc=Y(round(p(1,1)/Ts):round(p(2,1)/Ts)); tc=round(p(1,1)/Ts)*Ts:Ts:round(p(2,1)/Ts)*Ts; Despitch.m % Funcion que implementa el desplazamiento de Pitch. % El resultado es una señal YN con una frecuencia N veces % superior a la señal Y function YN=despitch(Y,N) j=1; i=1; YN(j)=Y(i); while(i<length(Y)-1) i=i+N; j=j+1; n=floor(i); f=i-n; YN(j)=f*Y(n+1)+(1-f)*Y(n); end YN=YN';
APÉNDICE
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
137
Separa.m % Funcion utilizada para separar la seccion permanente de la transitoria % El usuario debe seleccionarlas con el raton asi como los periodos % que se utilizaran para representarla function [tFtran,Ftran,tFperm,Fperm,Ytran,Yperm]=separa(Y,Fs); figure [ttran,Ytran]=cortar(Y,Fs); [tperm,Yperm]=cortar(Y,Fs); [tFtran,Ftran]=cortar(Ytran,Fs); [tFperm,Fperm]=cortar(Yperm,Fs); tFtran=tFtran+ttran(1); tFperm=tFperm+tperm(1); figure(1); Subplot(411);plot(ttran,Ytran); Subplot(412);plot(tperm,Yperm); Subplot(413);plot(tFtran,Ftran); Subplot(414);plot(tFperm,Fperm); Fftzoom.m % Funcion que realiza el analisis frecuencial de las secciones % transitoria y permanente que se seleccionan con la funcion separa % El programa desplaza la fft para represantarla de -Pi a Pi % y permite un zoom para representar de -Fmax a Fmax en lugar de -Fs/2 a % Fs/2 function [Y1,Y2]=fftzoom(Y,Fs,Fmax); [tFtran,Ftran,tFperm,Fperm,Ytran,Yperm]=separa(Y,Fs); M1=length(Ftran); M2=length(Fperm); M=min([M1 M2]); Ftran=Ftran(1:M); tFtran=tFtran(1:M); Fperm=Fperm(1:M); tFperm=tFperm(1:M); close all
APÉNDICE
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
138
figure(1) y1=Ytran; y2=Yperm; Subplot(411);plot(tFtran,Ftran); Subplot(412);plot(tFperm,Fperm); N=2*length(Yperm); Y1=abs(fft(y1,N)); Y1=Y1/max(Y1); Y1t=[Y1(round(length(Y1)/2):length(Y1)); Y1(1:round(length(Y1)/2)-1)]; Y2=abs(fft(y2,N)); Y2=Y2/max(Y2); Y2t=[Y2(round(length(Y2)/2:length(Y2))); Y2(1:round(length(Y2)/2)-1)]; F=-Fs/2:Fs/N:Fs/2-1/N; Subplot(413);plot(F(round(length(F)/2)-Fmax:round(length(F)/2)+Fmax),Y1t(round(length(Y1t)/2)-Fmax:round(length(Y1t)/2)+Fmax)); Subplot(414);plot(F(round(length(F)/2)-Fmax:round(length(F)/2)+Fmax),Y2t(round(length(Y2t)/2)-Fmax:round(length(Y2t)/2)+Fmax)); %La frecuencia maxima a representar es Fs/2
AGRADECIMIENTOS
SÍNTESIS DIGITAL DE INSTRUMENTOS MUSICALES
SÍNTESIS DIGITAL DE PIANOS ELECTRÓNICOS
139
AGRADECIMIENTOS Finalmente, quisiera expresar mi agradecimiento a las personas que
me ayudaron durante el desarrollo de este trabajo. En primer lugar, a mi madre y a mi padre, por el sólido apoyo y la
indiscutible confianza que siempre han depositado en mí. A mi tutor, D. Rubén Martín Clemente, por darme la posibilidad de
realizar un trabajo en el que uniera dos de mis disciplinas más queridas: el Tratamiento Digital de Señales y la Música, y en general a todos los profesores de la Escuela Superior de Ingenieros, que supieron estimularme intelectualmente y académicamente para llegar hasta aquí.
A mis amigos, algunos de ellos futuros compañeros de profesión, por
la ayuda y el apoyo prestado, tanto académico como moral y humano, éste último inestimable en el mundo tan competitivo en que vivimos.
Por último, y no menos importante, a mis profesores del
Conservatorio de Música, que me enseñaron a valorar, no sólo el aspecto científico y tecnológico de la realidad, sino también la importancia del Arte y las disciplinas humanísticas en el desarrollo personal, inculcando en mí el amor a la Música y el gusto por lo estético.
En definitiva, a la Música misma, nuestra amada inmortal sin la cual,
en palabras de Nietzsche, la Vida sería un error….