Sociedad Mexicana de Ingeniería Estructural ADAPTACIÓN DE ... · repercutir en el desarrollo de...
19
1 Sociedad Mexicana de Ingeniería Estructural Sociedad Mexicana de Ingeniería Estructural ADAPTACIÓN DE SENSORES INTELIGENTES EN LA CARACTERIZACIÓN DINÁMICA DE MARCOS PLANOS Gregorio Xavier Argueta Ortiz 1 , Manuel E. Ruiz-Sandoval Hernández 2 y Ricardo Marcelín Jiménez 3 RESUMEN La instrumentación es una herramienta experimental que permite el monitoreo y la caracterización dinámica de las estructuras. Esta es llevada a cabo por medio de instalación de sensores conectados a un sistema de adquisición. Los equipos de adquisición de datos actuales tienen una comunicación alámbrica con los sensores, por lo que instrumentar una estructura representa altos costos de inversión, instalación y mantenimiento. Como una alternativa a este paradigma, este trabajo presenta una propuesta de implementación de redes inalámbricas de sensores a sistemas estructurales. La primera meta es el determinar la mejor ubicación de los sensores sobre la estructura para lograr la mejor caracterización dinámica. El segundo objetivo es la construcción de redes de sensores que permitan la mejor distribución de la información, así como la reducción de consumo de energía. ABSTRACT Instrumentation is a tool that allows for the monitoring and the dynamic characterization of the structures. This is achieved through the placement of sensors that are connected to a data acquisition system. The actual data acquisition systems have a wired communication with the sensor's network. For this reason the structure's instrumentation represents a high cost of investment, installation and maintenance. As an alternative to this paradigm, this paper presents an implementation of a wireless network of sensors. The first objective is to select the placement for network to attain the best dynamic characterization of the structure. The second goal is to propose a network connection that allows for a better information distribution as well as low power consumption. INTRODUCCIÓN La instrumentación estructural tiene como finalidad principal el monitorear las características dinámicas. También permite conocer su comportamiento antes, durante y después de haber sido sometida a una excitación. La información arrojada permitiría alertar sobre condiciones de inseguridad y así realzar las operaciones de mantenimiento pertinentes para salvaguardar vidas, pérdidas económicas y materiales. El monitoreo de estructuras es poco practicada en México, y en términos generales en el mundo. Algunas de las posibles causas por las cuales esto sucede son debido: a) los altos costos de instalación y mantenimiento de la red de sensores, b) carecer de metodologías para una adecuada de instrumentación y, c) falta de adecuaciones de tecnologías novedosas y de fácil manejo. 1 Alumno de postgrado en Ingeniería Estructural Departamento de Materiales. Área de Estructuras. Av. San Pablo #180, Col. Reynosa-Tamaulipas, 02200 México, D.F.; [email protected] 2 Profesor, Universidad Autónoma Metropolitana Unidad Azcapotzalco. Departamento de Materiales. Área de Estructuras. Av. San Pablo #180, Col. Reynosa-Tamaulipas, 02200 México, D.F. Teléfono, (55) 5318-9455; fax: (55) 5318-9085; [email protected] 3 Profesor, Universidad Autónoma Metropolitana Unidad Iztapalapa. Departamento de Ingeniería Eléctrica. México, D.F. Av. San Rafael Atlixco N° 186. Col. Vicentina. Distrito Federal México C.P. 09340 58044636 ext.128; [email protected]
Transcript of Sociedad Mexicana de Ingeniería Estructural ADAPTACIÓN DE ... · repercutir en el desarrollo de...

1
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
ADAPTACIÓN DE SENSORES INTELIGENTES EN LA CARACTERIZACIÓN DINÁMICA DE
MARCOS PLANOS
Gregorio Xavier Argueta Ortiz 1, Manuel E. Ruiz-Sandoval Hernández 2 y Ricardo Marcelín Jiménez3
RESUMEN La instrumentación es una herramienta experimental que permite el monitoreo y la caracterización dinámica de las estructuras. Esta es llevada a cabo por medio de instalación de sensores conectados a un sistema de adquisición. Los equipos de adquisición de datos actuales tienen una comunicación alámbrica con los sensores, por lo que instrumentar una estructura representa altos costos de inversión, instalación y mantenimiento. Como una alternativa a este paradigma, este trabajo presenta una propuesta de implementación de redes inalámbricas de sensores a sistemas estructurales. La primera meta es el determinar la mejor ubicación de los sensores sobre la estructura para lograr la mejor caracterización dinámica. El segundo objetivo es la construcción de redes de sensores que permitan la mejor distribución de la información, así como la reducción de consumo de energía.
ABSTRACT
Instrumentation is a tool that allows for the monitoring and the dynamic characterization of the structures. This is achieved through the placement of sensors that are connected to a data acquisition system. The actual data acquisition systems have a wired communication with the sensor's network. For this reason the structure's instrumentation represents a high cost of investment, installation and maintenance. As an alternative to this paradigm, this paper presents an implementation of a wireless network of sensors. The first objective is to select the placement for network to attain the best dynamic characterization of the structure. The second goal is to propose a network connection that allows for a better information distribution as well as low power consumption.
INTRODUCCIÓN La instrumentación estructural tiene como finalidad principal el monitorear las características dinámicas. También permite conocer su comportamiento antes, durante y después de haber sido sometida a una excitación. La información arrojada permitiría alertar sobre condiciones de inseguridad y así realzar las operaciones de mantenimiento pertinentes para salvaguardar vidas, pérdidas económicas y materiales. El monitoreo de estructuras es poco practicada en México, y en términos generales en el mundo. Algunas de las posibles causas por las cuales esto sucede son debido: a) los altos costos de instalación y mantenimiento de la red de sensores, b) carecer de metodologías para una adecuada de instrumentación y, c) falta de adecuaciones de tecnologías novedosas y de fácil manejo.
1 Alumno de postgrado en Ingeniería Estructural Departamento de Materiales. Área de Estructuras.
Av. San Pablo #180, Col. Reynosa-Tamaulipas, 02200 México, D.F.; [email protected] 2 Profesor, Universidad Autónoma Metropolitana Unidad Azcapotzalco. Departamento de Materiales.
Área de Estructuras. Av. San Pablo #180, Col. Reynosa-Tamaulipas, 02200 México, D.F. Teléfono, (55) 5318-9455; fax: (55) 5318-9085; [email protected]
3 Profesor, Universidad Autónoma Metropolitana Unidad Iztapalapa. Departamento de Ingeniería Eléctrica. México, D.F. Av. San Rafael Atlixco N° 186. Col. Vicentina. Distrito Federal México C.P. 09340 58044636 ext.128; [email protected]

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
2
Algunos de los beneficios de instrumentar una estructura son: a) determinación de las características dinámicas, b) conocimiento del comportamiento de la estructura ante condiciones de servicio, c) monitoreo del desempeño estructural ante excitaciones inducidas, d) detección de peligro potencial debido a daño de la estructura y, e) revisión de la seguridad de estructuras diseñadas con reglamentación previa. Además, la información arrojada por el monitoreo de estructuras puede utilizarse en la comprobación de hipótesis y resultados de diversos análisis de modelos matemáticos, en particular los correspondientes a modelos de elemento finito; también, en extrapolar la respuesta actual de la estructura con la respuesta esperada con un sismo de gran intensidad, y finalmente el de facilitar la toma de decisiones sobre estructuras que se requiere rehabilitar. A largo plazo, los beneficios de contar con un número considerable de estructuras instrumentadas pueden repercutir en el desarrollo de mejores códigos de diseño, así como en el estudio de la degradación que sufren las estructuras ante excitaciones accidentales (sismos de gran intensidad, huracanes, presiones hidrostáticas). La instrumentación en sistemas estructurales es un método no destructivo para la detección de daño ya sea en estructuras de concreto, acero, mampostería, etc. En las últimas décadas ha generado especial interés en los investigadores debido a los avances tecnológicos tanto en dispositivos de medición como en el procesamiento digital de señales. El desarrollo tecnológico e industrial que se tiene en la actualidad, ha permitido la creación de sistemas que recopilan y envían información por medio de redes inalámbricas a costos razonables. Las redes inalámbricas tienen un gran número de aplicaciones ya que proporcionan benéficos económicos a corto y largo plazo. Las redes inalámbricas pueden ser aplicadas a sistemas estructurales y la llamaremos en este artículo como Instrumentación Inalámbrica de Sistemas Estructurales (IISE). Esta pretende disminuir los costos de instalación y mantenimiento, implementar una metodología de fácil aplicación a cualquier tipo de estructura de carácter civil, la opción de poder incrementar el número de sensores colocados en la estructura sin repercutir en mayores costos e incrementar el número de estructuras instrumentadas, todo esto sin disminuir las bondades brindadas por la instrumentación alámbrica. Para lograr la implementación de una red de sensores inalámbricos a una estructura, es necesario resolver problemas relacionados con el manejo de información, comunicación entre los sensores, ubicación y cantidad de sensores requeridos, entre otros. Este artículo está estructurado de la siguiente manera. En la siguiente sección se citarán los trabajos de instrumentación realizados en México. Posteriormente presentarán algunas de las metodologías para la selección de los sitios óptimos para la ubicación de sensores y en donde se elegirá una de ellas para su aplicación. A continuación se hará un resumen de los algoritmos distribuidos y se propondrá una técnica para la construcción de redes. Finalmente, se presentará la implementación de estos conceptos de forma analítica en un modelo de marco plano de varios niveles y crujías.
ANTECEDENTES En esta sección se citan algunos de los trabajos relacionados con la instrumentación de estructuras en México. También se mencionaran algunas propuestas de metodologías de instrumentación óptima de sistemas estructurales. D. Muriá y R. González [1], establecen recomendaciones básicas para identificar las propiedades dinámicas de edificios a partir de mediciones de vibración ambiental y registros sísmicos. Los resultados obtenidos por los autores muestran que los periodos naturales de vibración son sensibles a las características de los suelos y de los sistemas estructurales. El equipo de medición utilizado, se diseño y constituyó como un sistema de adquisición de datos que permite capturar simultáneamente las vibraciones en ocho puntos de la estructura. En cada punto de medición se coloco un acelerómetro para detectar y adquirir las señales, cuyas amplitudes se encuentran entre 10-4 y 10-5 g. Estas señales se trasmiten, a través de cables blindados, a unos acondicionadores donde se amplifican y filtran.

3
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
Meli, R. et. al. [2], describen la instrumentación de la catedral metropolitana durante los tres años de monitoreo, así como un análisis de resultados. Mencionan la importancia de la instrumentación sísmica de estructuras antiguas con la finalidad de comprobar hipótesis realizadas sobre modelos analíticos y así lograr un mejor entendimiento de las características dinámicas de la catedral. Posteriormente, y con la ayuda de los resultados obtenidos, tomar las decisiones adecuadas para la correcta reparación de la catedral. La red esta compuesta por sensores que miden en la aceleración en tres direcciones ortogonales. Los registros son grabados en una memoria de estado sólido y son recuperados a través de un puerto serial utilizando una computadora portátil. Alcántara, L. et. al. [3], presentan el diseño de un sistema centralizado de registro sísmico en un edificio ubicado en la Ciudad de México, la instrumentación de la estructura se integrada por equipos digitales de alta resolución con sensores conectados a un puesto central de registro. Entre las características adicionales se puede mencionar que la instrumentación cuenta con un sistema de control de tiempo GPS y que puede ser supervisada de manera remota mediante telefonía de línea convencional. Los registros obtenidos a corto y largo plazo y los estudios que de estos se deriven permitirán avanzar en el conocimiento de la respuesta dinámica de este tipo de estructuras. La instrumentación de la red esta compuesta de un arreglo de 23 acelerómetros uniaxiales ubicados en la estructura, 2 triaxiales localizados en el terreno y 1 en el subsuelo en los depósitos profundos del valle. Shah P. C. y Udwadia F. E. [4], abordan la problemática de la posición óptima de sensores para estimar los parámetros dinámicos en edificios. La solución propuesta está basada en la relación lineal entre las pequeñas perturbaciones en dimensiones finitas y lo observado de la respuesta del sistema a lo largo del tiempo. La localización de los sensores esta determinada por la minimización de la matriz de covarianza. La metodología puede aplicarse sólo en la instrumentación de estructuras modeladas con vigas de cortante. Udwadia F. E. [5], estudia una metodología de localización óptima de sensores en sistemas dinámicos, esta se basa en la matriz de información Fisher. El método propuesto por el autor es aplicable a sistemas lineales y nolineales de múltiples grados de libertad. El autor modela un sistema de tres grados de libertad asignando a cada uno de ellos un sensor y después calcula la matriz Fisher. Esta matriz da como resultado la ubicación óptima del sensor al basarse en la cercanía lograda en comparación con la rigidez analítica del sistema estructural. Heredia E. [6], presenta criterios de instrumentación óptima de sistemas estructurales. La metodología propuesta por el autor esta definida en términos de la función de pérdida Bayesiana. Esta función se relaciona con la matriz de información Fisher. Con el propósito de corroborar sus hipótesis el autor implementan dicha metodología a un sistema de múltiples grados de libertad sujeto a un grupo de excitaciones sísmicas con diferentes coeficientes de variación. En el primer paso los sensores son colocados en cada grado de libertad, posteriormente se realiza la simulación, con la finalidad de obtener la función de pérdida del sistema estudiado. Dicha función es clave angular debido a que, proporciona la ubicación óptima del sensor, la cual esta relacionada directamente con los valores mínimos obtenidos en los coeficientes de la función de perdida. Heredia E. y et. al. [7], retomaron criterios de localización óptima de sensores en sistemas estructurales, publicados previamente por Heredia [6]. La metodología propuesta por los autores se aplica a sistemas estructurales desplantados en suelos blandos, esto con la finalidad de verificar hasta que grado son afectados los sistemas de instrumentación. Ka-Veng Y y et. al. [8], Presentan una metodología para diseñar las configuraciones óptimas y rentables de sensores para la actualización de modelos y detección de daño estructural. La configuración optima es seleccionada tal que los datos registrados den la mayor información acerca de la condición de la estructura. La selección está basada en la medida de la entropía de la información de las incertidumbres en los parámetros del modelo usando un método estadístico de la identificación del sistema. Se aplica la metodología propuesta a un sistema de múltiples grados de libertad excitado en la base. Los resultados obtenidos muestran que el número de sensores requeridos y la ubicación están en función de las formas modales que sea necesario obtener.

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
4
An-Pan Cherng [9], presenta una sistematización del proceso de instrumentación en sistemas estructurales, el autor realizan un análisis de las metodologías existentes que auxilian a la instrumentación de estructuras (matriz de información Fisher, función de perdida Baysiana), de estas metodologías obtienen un algoritmo que relaciona los beneficios de cada una de ellas, posteriormente realizan una simulación dicha metodología en un sistema estructural. Marcelín R. [10], aborda la temática de sistemas distribuidos, plantea las dificultades de su construcción, así como las limitaciones de los componentes que las integran. Estudia las características que integran dichos sistemas.
INSTRUMENTACIÓN ÓPTIMA DE SISTEMAS ESTRUCTURALES Después de presentar los distintos enfoques de instrumentación, se optó utilizar la metodología propuesta por An-Pan Cherng. En esta se integran dos aspectos importantes en la ubicación óptima de sensores: la ponderación geométrica del sensor (su ubicación en la estructura), y la de la información obtenida. A continuación será abordada de una manera detallada aspectos fundamentales estudiados por An-Pan Cherng en su trabajo, éstos se relacionan con las metodologías de instrumentación propuestas por Bayard-Hadaegh-Meldrum (BHM) y Lim-Gawronski (LG). ENFOQUE LIM-GAWRONSKI (LG) El método LG acumula la contribución directa de cada sensor con respecto de la ubicación que tenga en la estructura, así como la forma modal que sea desea monitorear. La contribución fraccional de cada sensor es evaluada con respecto de la contribución total de conjunto de los sensores. Dicha contribución se define en términos de la suma de los elementos diagonales de la matriz HTH.
( ) ( ) ( )∑ ∑= =
+=+==n
1r
n
1r
2r
2r
2r
2r
2r
T2 εασHHtrazaγ ασ (1)
( )∑ ∑∑= ==
+=
n
1r
p
1l
2lr
m
1i
2ir
2r
2r
2 φφααγ (2)
( )∑ ∑ ∑= = =
+=
m
1i
n
1r
p
1l
2lr
2ir
2r
2r
2 φφααγ
(3)
∑ ∑= =
=m
1i
n
1r
2ir
2 γ~γ (4)
∑=
=m
1i
2i
2 γγ (5)
donde:
∑=
=n
1r
2ir
2i γ~γ
(6)
En la ecuación 6, 2ir
~γ simboliza la contribución del i-ésimo sensor de la r-ésima forma modal. A su vez, 2iγ
(ecuación 5) representa la posición de la contribución del i-ésimo sensor ubicado sobre n objetivos modales. La ecuación 6 puede se presentada de forma matricial.

5
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
=
2mn
2m2
2m1
22n
222
221
21n
212
211
LG
γ...γγ............γ...γγγ...γγ
Γ
(7) La matriz ΓLG, puede entenderse de la siguiente manera, cada columna representa la distribución de energía del modo sobre el sensor m y cada fila representa la contribución de la ubicación de un sensor sobre los n modos objetivo. El índice de ubicación del i-ésimo sensor puede ser definido como la fracción de contribución (ecuación 8), por tal motivo se encuentra comprendido en el intervalo de cero y uno.
,γγφ 2
2i
i = 1φ0 i ≤≤ (8)
∑=
=m
1ii 1φ
(9)
La mejor combinación de la locación de sensores ms es encontrada ordenando los mayores índice de locación, ϕi’s, de las posibles m locaciones de sensores. De acuerdo con lo anterior, se puede indicar que una de las ventajas de este método es que la búsqueda de la mejor combinación de locación de sensores puede ser llevada a cabo por un algoritmo de ordenamiento. Por lo tanto, no es necesario realizar pruebas de combinaciones o iteraciones para comparar la importancia de las combinaciones. Esta solución no es óptima, pero provee de una formulación poco sencilla para determinar la importancia de los sensores. El método LG es también conocido como “método de trazo” o “método de promedio geométrico” ENFOQUE BAYARD-HADAEGH-MELDRUM (BHM) An-Pan Cherng describe la metodología BHM, como un algoritmo de dos pasos. El primero es realizar la suma de la contribución modal registrada por la locación de todos los sensores. El segundo es clasificar por orden de importancia el producto de estas contribuciones. Se propone una replanteamiento del enfoque original BHM en un marco del la correlación subespacial de señales. La raíz cuadrada del determinante de HTH, es el producto de las formas modales diferentes de cero, de los Valores Singulares Hankel (HSVs) de H, como se muestra a continuación.
∏ ∏= =
===n
1r
n
1r
2rrrrr
1/2T εαασσH)det(HS (10)
21
n
1r
2r
n
1rrr SSεααS =
= ∏∏== (11)
La contribución de la frecuencia natural y el factor de amortiguamiento en S1, están separados de las formas modales en S2. El primer termino de S1 es constante para los modos normales, por tal motivo puede ser eliminado de la secuencia. Al realizar un poco más de álgebra las siguientes expresiones son encontradas:
∏ ∏∏= ==
=∝==∝n
1r
n
1r
2r
2r
2r
n
1r
2r2 ψµµµεSS
(12)

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
6
donde:
( )( )ΦΦdiagdetφφφψ Tn
1rr
Tr
n
1r
2r === ∏∏
== (13) La matriz Φ está integrada por vectores columna llamados simplemente φr. Las ecuaciones 12 y 13 señalan que en el producto de los HSV, S, es proporcional al índice de ubicación ψ, el cual también es la Matriz de Información Fisher (FIM) del método BHM. Se confirma que la maximización del producto de los HSVs, es equivalente a la maximización de la forma modal de la ubicación del sensor. Debido a que el resultado es el producto de los valores extraídos de la diagonal de la matriz de correlación ΦTΦ, el método BHM es llamado “el método del determinante” o “método de la media geométrica”.
El método BHM construye una matriz, la cual puede ser formada tomando en cuenta los vectores de las formas modales, estos son representados en la ecuación 13.
=
2mn
2m2
2m1
22n
222
221
21n
212
211
BHM
φ...φφ............φ...φφφ...φφ
Γ (14)
Para calcular el índice de locación ψ se requerirá simplemente obtener la norma L1 de de las columnas. La evaluación de la contribución modal puede ser obtenida modo por modo (es decir independientemente), y esto se indica en la ecuación 14. Finalmente, como se esperaba para, si los modos de interés difieren este procedimiento producirá diferentes resultado. Una forma de compensar la posible divergencia en productos de una estructura muy grande, el método BHM sugiere un algoritmo natural que reemplacé el original ψ, esté es mostrado en la ecuación 15.
( )∑∏==
=
=
n
1rr
Tr
n
1rr
Tr φφlogφφlogψ' (15)
Cherng considera que ya que la función del logaritmo es monotónica, la ecuación 15 puede pensarse que tendrá una respuesta muy cercana a la solución original. Las frecuencias naturales y factores de amortiguamiento contenidos en rα y rα , no son afectados por la ubicación de los sensores, por lo que pueden ser omitidos en el proceso de optimización, siempre y cuando las se considere que el sistema contenga los modos de interés normales. Si se cumple lo anterior, el uso del tipo de sensor (de aceleración, velocidad o desplazamiento) puede ser usado sin pérdida de generalidad. Un inconveniente computacional del método BHM es que esté se lleva más tiempo en ser procesado en comparación del método LG. DIFERENCIAS ENTRE LAS METODOLOGÍAS DE INSTRUMENTACIÓN LG Y BHM Como se mencionó anteriormente, el método BHM puede ser interpretado como la maximización de la energía modal geométrica promedio, mientras que el método LG puede entenderse como el promedio aritmético de la energía modal. Por tal motivo el método BHM tiende a conservar las ubicaciones que poseen los niveles de energía modal más próximos como resultado de la multiplicación. En comparación el método LG puede terminar seleccionando simultáneamente las ubicaciones más fuertes o débiles, ya que la suma no

7
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
puede diferenciar la contribución modal individual. Es posible que el desequilibrio de las combinaciones modales pueda corregirse mediante la multiplicación de los factores o elementos de peso en cada modo, no obstante no existe garantía de una solución óptima pueda ser encontrada por el método LG. Además dicho método debe de utilizarse con precaución o bajo ciertas restricciones, esto debido a que la construcción modal depende de los HSVs, cada uno de éstos, no es solo proporcional a la constante modal sino también es inversamente proporcional al amortiguamiento y la frecuencia natural. Para los sensores de desplazamiento, los modos de baja frecuencia tienden a producir una relativamente mayores HSVs que los modos de frecuencias altas. Por otro lado, los modos de alta frecuencia resultan en mayores HSVs para los sensores de aceleración. El amortiguamiento es un factor que no puede descuidarse, por tal motivo los sensores de velocidad pueden ser la mejor opción ya que eliminan las componentes de frecuencia en las HSVs. En resumen, las formas modales son favorecidas sobre los HSVs cuando un modelo de elemento dinito confiable esta disponible antes de que se lleve a cabo la prueba modal. Bajo estas circunstancias la ecuación 14 puede ser utilizada por ambos métodos, solo cuando el propósito sea encontrar el sensor que contribuya en mayor media. Si se tiene como propósito colocar en categoría a los sensores, el método BHM desempeña un esfuerzo notable debido a que busca la configuración óptima entre todas las posibles combinaciones. Cuando el costo computacional es una variable considerable, en especial cuando m s<< m, el método LG es la mejor opción. Después de haber presentado las metodologías para la selección de la localización óptima de sensores, el siguiente paso será la interconexión de estos para la transmisión de información. En la siguiente sección se presentarán los algoritmos distribuidos para la construcción de redes de sensores, así como una propuesta con base en ellos.
ALGORITMOS DISTRIBUIDOS Marcelín R. indica que los algoritmos distribuidos pueden definirse como una colección de procesos autónomos que intercambian información para la realización de una tarea común. Donde cada proceso que corre su versión particular de algoritmo distribuido puede caracterizarse como un conjunto finito de estados, eventos de comunicación y transiciones atómicas entre estados, comenzadas mediante eventos de comunicación. En sistemas distribuidos es frecuente representar a una red de comunicación mediante la exploración de la gráfica
G = (V, E) (16) donde: G es el conjunto de nodos, V representa los procesadores de la red y el conjunto de aristas “E” representa los canales bidireccionales de comunicación (figura 1). Adicionalmente dicha gráfica es conexa, por tal motivo mientras se le transita puede ser construida una subgráfica que incluya a todos sus vértices utilizando un número mínimo de aristas, con ello se logra la construcción de un árbol generado.

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
8
1
2
3 5
4
6
NODO ARISTA
Figura 1 Representación de la gráfica G = (V, E) Para construir un árbol generador existen varios métodos. De entre estos se reconocen dos enfoques alternativos como los más usados: la búsqueda en profundidad o DFS (Depth First Search) y la búsqueda en amplitud o BFS (Breadth First Search). A continuación será abordado el procedimiento de construcción de ambas metodologías. CONSTRUCCIÓN DE UN ÁRBOL DFS Al iniciar el algoritmo, los procesos participantes poseen las mismas instrucciones del código secuencial, por tal motivo se dice que existe una condición de inicial simétrica en el conjunto. Es frecuente en programación distribuida otorgar un privilegio a uno de los procesos del sistema, con ello se logra fracturar el equilibrio inicial. El algoritmo DFS, da inicio cuando se fractura la simetría del conjunto debido a la asignación de un proceso arbitrario “s”. Se dice que “s”, inicia la circulación de una ficha o mensaje de activación con el que es seleccionado otro proceso, al que se le otorgara el control de la ejecución. Sólo aquel que posea la ficha será considerado activo, por tal motivo en cualquier instante durante la ejecución del algoritmo, no hay más que un proceso en dichas condiciones. Un proceso marca la unión desde el instante en que es recibido el mensaje de activación por vez primera y es elegido un nuevo camino por el que deberá reexpedir la ficha para iniciar el algoritmo en otra parte del sistema. Posteriormente, el proceso detiene la ejecución local y espera noticias del vecino al que previamente cedió la acción. En el momento en que un proceso no pueda retrasmitir la ficha (debido a que ya no tengan vecinos que visitar), en ese instante envía un nuevo mensaje a través del enlace que tiene marcado, para devolver el control de las operaciones al proceso que le activó (su padre), en ese instante se concluye la ejecución local del algoritmo. En el otro extremo del enlace, el receptor designa como su hijo al vecino que le ha devuelto la acción. Cada vez que esto ocurre el proceso intenta reexpedir la ficha para activar a otro vecino, de lograse esto se detiene su ejecución nuevamente hasta recibir respuesta, de lo contrario, regresa el control a su propio padre y concluye esta parte del proceso. En ocasiones en un proceso se recibe repetido un mensaje de activación, por un enlace distinto al original, desde alguno de sus vecinos que ignora sus condiciones locales. El receptor debe de responder con otro mensaje donde informe el estado de su ejecución y la imposibilidad de que aquel lo designe su hijo, puesto que ya hubo otro que lo activó con anterioridad. En algún momento, la actividad regresa a s y, si no existen más caminos por recorrer, entonces finaliza por completo la ejecución. Al concluir todo el proceso se tiene la posibilidad de reconocer los enlaces que comunican a cada padre con sus hijos, se logra reconocer todos los vértices de la gráfica asociados al sistema y atravesado todas sus aristas.

9
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
La exploración inicia y concluye en el vértice que corresponde a s y que será la raíz del árbol DFS generado. Al iniciar la ejecución en s, la ficha recorre la red, concluyendo en el primer proceso que no encuentra vecinos que visitar. En cada ocasión que un proceso se encuentre con la imposibilidad de seguir recorriendo camino, el control remonta un eslabón de la cadena, con el propósito de buscar una nueva ruta que explorar. El seudocódigo del algoritmo DFS se presenta en la figura 2, en donde pueden observarse la serie de procesos que lo definen. A continuación se mencionaran los mensajes que intercambian cada uno de ellos. DESCUBRE: llega a un proceso cuando se le visita por primera vez.
REGRESA: devuelve el centro de actividad al proceso padre.
RECHAZO: respuesta de un proceso al que se visita más de una vez. Además cada proceso mantiene una colección local de variables: visitado(i): VERDADERO, si ya se recibió DESCUBRE. Inicialmente, FALSO.
padre(i): El padre de i, en el árbol DFS. Inicialmente, igual a i.
vecinos(i): El conjunto de nodos con los que i comparte una arista.
sin visitar(i): El conjunto de vecinos de i a los que aún no se les ha visitado. Inicialmente, es igual a todos los vecinos de i.
Figura 2 Algoritmo DFS (marcelin R. 2004) PROPAGACIÓN SIMPLE El problema de propagación o difusión, surge en las operaciones de un sistema distribuido, con el propósito de calcular la ruta más corta entre dos sitios arbitrarios. Además para desarrollar pruebas de conectividad y reconocer cambios en la topología de la red. El algoritmo PI utiliza la búsqueda en amplitud BFS. Sobre una red en la que se supone no existe un reloj global, “s” envía su mensaje a cada uno de sus vecinos, estos lo reciben y lo reexpiden por todos sus canales de comunicación. De igual manera, los procesos que reciban realizaran exactamente las mismas operaciones. Un proceso concluye su ejecución, en el instante que envía el mensaje a sus vecinos. El seudocódigo del algoritmo PI se presenta en la figura 3, en donde pueden observarse la serie de procesos que lo definen. A continuación se mencionaran los mensajes que intercambian cada uno de ellos. M: la ficha que se propaga por la red. COMIENZA: mensaje recibido desde el exterior.

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
10
Al mismo tiempo, cada procesador mantiene registros donde se almacena su condición local. visitado(i): cuyo valor es VERDADERO, si ya ha recibido un mensaje y FALSO de lo contrario. padre(i): indica al procesador desde el que i recibe a M, por primera vez. vecinos(i): conjunto de nodos con los que i comparte una arista.
Figura 3 Algoritmo PI (R. Marcelín, 2004)
INSTRUMENTACIÓN ÓPTIMA DE UN MARCO PLANO A continuación, se presentan los resultados obtenidos al implementar los algoritmos de instrumentación LG-BHM propuestos por Cherng (2003) a un marco plano, con el propósito de estudiar el comportamiento que estás metodologías presentan ante diferentes arreglos de instrumentación en una misma estructura. Para ello se modela un marco plano de cuatro maneras distintas. El marco utilizado en esté trabajo cuenta con tres crujías y dos niveles. El material propuesto para la estructura es concreto de fc’ = 25 Mpa (250 kg/cm2). Las columnas son de sección transversal cuadrada y las vigas son de sección rectangular figura 4a. Las cargas trasmitidas a las vigas por la losa son mostradas en la figura 4b. La nomenclatura que será utilizada para nombrar al marco es E2.
a) Estructuración

11
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
w = 9810 N/mw = 9810 N/m
w = 14715 N/mw = 14715 N/m
w = 14715 N/mw = 14715 N/m
w = 14715 N/m
w = 14715 N/m
b) Cargas actuantes
Figura 4 Estructuración del marco “E2” La discretización de la estructura es fundamental en la instrumentación óptima de sistemas estructurales. Esto debido a que cada grado de libertad modelado en la estructura es candidato a tener colocado un sensor que registre su comportamiento. Para cada nodo modelado en el marco corresponden tres grados de libertad, por tal motivo esté puede tener hasta 3 sensores, SX, SY y Mθ, que registrarían el comportamiento del nodo en la dirección horizontal, vertical y rotacional respectivamente. En esté trabajo el marco E2, fue discretizado de cuatro maneras diferentes, en la tabla 1, es presentada la nomenclatura correspondiente para cada marco.
Tabla 1 Nomenclatura de los sub-marcos “E2”
Marco Grados de libertad E2-33 33E2-90 90
E2-147 147E2-204 204
A continuación se presenta la discretización realizada al marco E2 de acuerdo a la tabla 1 (figuras 5, 6, 7 y 8).
3
1
2
56
4
89
7
15
13
10
12
18
16
17
14
11
19
2021
23
22
24
25
2627
32
29
28
30
33
31
Figura 5. Marco E2-33

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
12
6
4
5
1112
10
1718
16
30
28
22
24
36
34
35
29
23
40
4142
47
46
48
52
5354
65
59
58
60
66
64
13
15
7
9
1
3
8
2
14 3233
20
26
21
19
27
25
31 49
43
44
38
37
51 50
45
39
55
5657
61
63 62
68
67
69
70
7172
76
78 77 81 80
79
88
89908687
85
73
75 74
82
8384
Figura 6. Marco E2-90
108
106
107104
103
105
100
102 101
109
110111
129 128
127
119120
118
123
121
122 125
124
126
144
142
143140
139
141
136
138 137
145
146147
96
94
95
98
97
99
90
88
89
92
91
93
87
85
86
8384
82
80
79
81
69
67
68
71
70
72
78
76
77
74
73
75
63
61
62
65
64
66
6
58
59
5657
55
30
28
29
32
31
33115112
116113114 117
135132 131 134
130 133
39
37
38
35
34
36
48
46
47
50
49
51
45
43
44
41
40
42
54
52
5326
25
27
15
13
14
17
16
18
24
22
23
20
19
21
9
7
8
11
10
12
6
4
5
2
1
3
Figura 7. Marco E2-147
2
1
3
6
4
5
8
7
9
12
10
11
23
22
24
21
19
20
17
16
18
15
13
14
26
25
27
30
28
29
32
31
33
36 198
196
197194
193
195192
190
191188
187
189
34
35 71
70
72
69
67
68
65
64
66
63
61
62
50
49
51
54
52
53
56
55
57
60
58
59
47
46
48
45
43
44
41
40
42
39
37
38 110
109
111
114
112
113
116
115
117
120
118
119
131
130
132
129
127
128
125
124
126
123
121
122
74
73
75
78
76
77
80
79
81
84
82
83
95
94
96
93
91
92
89
88
90
87
85
86
98
97
99
102
100
101
104
103
105
108
106
107
158
157
159156
154
155152
151
153150
148
149146
145
147144
142
143140
139
141138
136
137134
133
135
180
178
179 182
181
183 186
184
185170
169
171 174
172
173 176
175
177162
160
161 164
163
165 168
166
167
204
202
203200
199
201
Figura 8. Marco E2-204

13
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
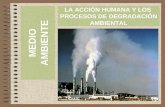
Para los cuatro casos estudiados en el marco E2, fueron obtenidos los parámetros dinámicos necesarios para aplicar las metodologías LG y BHM. Se determinó para todos ellos el arreglo óptimo de sensores, así como la ubicación y la orientación de sensor SX o SY (se omitieron los sensores de giro). Por razones de espacio sólo se presenta los resultados del marco E2-90. Este marco fue el elegido ya que la ubicación de sensores caracteriza de manera más eficiente (un número razonable de sensores) las formas modales de la estructura. La figura 9 muestra las cinco primeras formas modales del marco E2-90.
Primer modo T = 0.192 seg Segundo modo T = 0.057 seg
Tercer modo T = 0.047 seg Cuarto modo T = 0.045 seg
Quinto modo T = 0.044 seg
Figura 9. Primeros 5 modos del marco E2-90 En las tablas 2 y 3 se presentan los resultados correspondientes a la aportación que tiene cada sensor en el monitoreo global de los primeras cinco formas modales.

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
14
Tabla 2 Aportaciones correspondientes a los SX, para las primeras cinco formas modales del marco E2-90
Grado de MODO 1 MODO 2 MODO 3 MODO 4 MODO 5Libertad
4 0.0047 0.0222 0.0008 0.0017 0.00007 0.0166 0.0308 0.0004 0.0042 0.0000
10 0.0364 0.0118 0.0004 0.0003 0.000013 0.0609 0.0035 0.0001 0.0015 0.000416 0.0878 0.0707 0.0016 0.0021 0.000022 0.0048 0.0240 0.0017 0.0006 0.000025 0.0167 0.0339 0.0045 0.0001 0.000128 0.0364 0.0144 0.0002 0.0002 0.000131 0.0612 0.0035 0.0022 0.0007 0.000734 0.0874 0.0708 0.0015 0.0011 0.000040 0.0048 0.0233 0.0007 0.0012 0.000043 0.0165 0.0393 0.0003 0.0007 0.000346 0.0356 0.0214 0.0001 0.0001 0.000149 0.0593 0.0010 0.0011 0.0000 0.000252 0.0872 0.0683 0.0007 0.0009 0.000061 0.0162 0.0274 0.0055 0.0042 0.000164 0.0346 0.0319 0.0000 0.0001 0.000067 0.0048 0.0241 0.0013 0.0011 0.000070 0.0048 0.0247 0.0012 0.0009 0.000073 0.0048 0.0211 0.0017 0.0021 0.000076 0.0365 0.0136 0.0003 0.0003 0.000079 0.0361 0.0185 0.0002 0.0002 0.000082 0.0353 0.0276 0.0000 0.0000 0.000085 0.0879 0.0731 0.0016 0.0016 0.000088 0.0876 0.0719 0.0012 0.0011 0.0000
ΣContribución 0.96 0.77 0.03 0.03 0.00 Tabla 3 Aportaciones correspondientes a los SY, para las primeras cinco formas modales del marco
E2-90
Grado de MODO 1 MODO 2 MODO 3 MODO 4 MODO 5Libertad
68 0.0000 0.0000 0.0274 0.0886 0.167771 0.0000 0.0002 0.0871 0.0303 0.313074 0.0000 0.0002 0.0538 0.0009 0.237677 0.0000 0.0000 0.0805 0.3519 0.170680 0.0000 0.0001 0.2011 0.0867 0.054783 0.0000 0.0241 0.4409 0.3727 0.022986 0.0000 0.0002 0.0164 0.0092 0.006189 0.0000 0.0011 0.0290 0.0029 0.0146
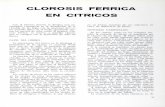
ΣContribución 0.00 0.03 0.94 0.94 0.99 En la figura 10, se muestra el arreglo y la orientación de los sensores para la propuesta de instrumentación analizada en el marco E2-90.

15
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
83
82
74
73
85
86 89
88
79
8077
76
71
7067
68
6143
4931
257
13
64
52
46
40
34
22
28
16
10
4
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sx
Sy
Sy
Sy
Sy
Sy
Sy Sy
Sy
Figura 10 Arreglo y orientación de los sensores en el marco E2-90
MANEJO DE LA INFORMACIÓN Y CONEXIÓN DE LOS SENSORES
Una vez seleccionados la ubicación de los sensores, es necesario determinar la mejor forma de su interconexión. Se proponen 5 diferentes arreglos que son presentados en las figuras 16. Estos arreglos serán usados para medir su conectividad y flujo de información.
3332
29 30 31
282726
25242321 22
201918
17161514131211
107 8 9
654321 1 2 3 4 5 6
987 10
11 12 13 14 15 16 17
18 19 20
2221 23 24 25
26 27 28
313029
32 33
Arreglo E2-90-I Arreglo E2-90-II
3332
29 30 31
282726
25242321 22
201918
17161514131211
107 8 9
654321
3332
29 30 31
282726
25242321 22
201918
17161514131211
107 8 9
654321
Arreglo E2-90-III Arreglo E2-90-IV
3332
29 30 31
282726
25242321 22
201918
17161514131211
107 8 9
654321
Arreglo E2-90-V
Figura 11 Arreglos de red I a IV sobre el marco E2-90

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
16
Otra variable que es importante estudiar es denominada la raíz de árbol generador, debido a que en está se colocara el sensor-padre, conectado directamente a la computadora central encargada de almacenar la información envidada por toda la red de sensores. A continuación serán presentadas las distintas ubicaciones que tiene la raíz, para los árboles generadores implementados en el marco E2-90, figura 12.
B
C
D
E
1 2 3 4 5 6
987 10
11 12 13 14 15 16 17
18 19 20
2221 23 24 25
26 27 28
313029
32 33
A
Figura 12 Raíces propuestas en el marco E2-90-A, B, C, D y E Las redes fueron simuladas. Los parámetros que fueron estudiados se presentan a continuación. Frecuencia de barrido: también conocida con el nombre tiempo de refresco, está variable se relaciona con el lapso de tiempo necesario para almacenar la información censada por los instrumentos de medición en la computadora central sin que se desborde la memoria (buffer). Tamaño del buffer: es una característica importante de los dispositivos de medición, está se refiere a la cantidad de información que pueden almacenar dicho dispositivo, en esté trabajo se considero que los dispositivos de medición tienen un buffer de 10000 bits. Velocidad del canal: esté parámetro indica la velocidad con que puede ser transmitida una cantidad limitada de información por segundo, por lo tanto es una característica técnica del sensor. En este trabajo dicha cantidad es 3450 bits/seg. Bits generados por el sensor: esta característica del sensor indica la cantidad de bits que es generado por un sensor durante en un segundo, en esté estudio ésa cantidad es igual a 100 bits/seg. La nomenclatura utilizada en la simulación se muestra en la tabla 4, en ella aparecen las distintas combinaciones resultantes de mezclar las redes de comunicación (I, II, III, IV y V) con las raíces del árbol generador (A, B, C, D y E), además esos resultados deben de ser combinados con distintas frecuencias de barrido (10, 50, 100, 130, 200 y 400). Se hace notar que las combinaciones II-D y I-E arrojaban problemas de desbordamiento, por lo que no se estudiaron. Finalmente, debido a razones de espacio sólo los resultados más representativos serán mostrados en esté trabajo.
Tabla 4 Combinaciones estudiadas de redes de comunicación y raíz de árbol generador
Combinación RED/ RAÍZ
A B C D E
I XX XX XX XX II XX XX XX XX III XX XX XX XX XX IV XX XX XX XX XX V XX XX XX XX XX
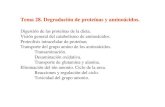
La figura 12 la información que recibe el nodo raíz a lo largo del tiempo para el arreglo E2-90-III ante diferentes frecuencias de barrido (tiempo de refresco).

17
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
Comparativa Red de comunicación vs. Raíz del árbol generador
Frecuencia de barrido t= 10 seg
0
10000
20000
30000
40000
50000
60000
70000
80000
0 100 200 300 400 500 600 700 800 900 1000
t [seg]
Info
rmac
ión
[bits
]
E2-90-IIIAE2-90-IIIBE2-90-IIICE2-90-IIID
E2-90-IIIE
Comparativa Red de comunicación vs. Raíz del árbol generador
Frecuencia de barrido t= 50 seg
0
50000
100000
150000
200000
250000
300000
350000
400000
0 500 1000 1500 2000 2500 3000 3500 4000
t [seg]
Info
rmac
ión
[bits
]
E2-90-IIIAE2-90-IIIBE2-90-IIICE2-90-IIID
E2-90-IIIE
Comparativa
Red de comunicación vs. Raíz del árbol generador Frecuencia de barrido t= 100 seg
0
100000
200000
300000
400000
500000
600000
700000
800000
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
t [seg]
Info
rmac
ión
[bits
]
E2-90-IIIAE2-90-IIIBE2-90-IIICE2-90-IIIDE2-90-IIIE
Comparativa Red de comunicación vs. Raíz del árbol generador
Frecuencia de barrido t= 130 seg
0
200000
400000
600000
800000
1000000
1200000
1400000
1600000
0 1000 2000 3000 4000 5000 6000 7000
t [seg]
Info
rmac
ión
[bits
]
E2-90-IIIAE2-90-IIIBE2-90-IIICE2-90-IIIDE2-90-IIIE
Comparativa
Red de comunicación vs. Raíz del árbol generador Frecuencia de barrido t= 200 seg
0
200000
400000
600000
800000
1000000
1200000
1400000
1600000
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
t [seg]
Info
rmac
ión
[bits
]
E2-90-IIIAE2-90-IIIBE2-90-IIICE2-90-IIIDE2-90-IIIE
Comparativa Red de comunicación vs. Raíz del árbol generador
Frecuencia de barrido t= 400 seg
0
500000
1000000
1500000
2000000
2500000
3000000
3500000
0 2000 4000 6000 8000 10000 12000 14000 16000
t [seg]
Info
rmac
ión
[bits
]
E2-90-IIIA
E2-90-IIIBE2-90-IIIC
E2-90-IIIDE2-90-IIIE
Figura 12 Información que recibe el nodo raíz a lo largo del tiempo.
CONCLUSIONES De los resultados obtenidos al modelar el marco E2 de cuatro maneras diferentes, se puede asegurar que la densidad en instrumentación dependerá directamente de la cantidad de formas modales que sea necesario monitorear. En el caso del marco E2, se fijo como objetivo monitorear los cinco modos principales, por lo tanto el arreglo que más satisfizo nuestros objetivos fue el modelo E2-90. En caso de colocar sensores que registren el comportamiento del nodo relacionado con rotación, éstos dispositivos solo contribuirán en el monitoreo deformas modales locales. Si se requiere monitorear las formas modales fundamentales (los primeros tres modos en el caso de esta estructura), los sensores que mas contribuyen son los que miden la traslación horizontal es decir los SX. El algoritmo distribuido diseñado por Marcelin para el intercambio y flujo de información (BFS-PI), es una solución adecuada para evitar, colisiones, cuellos de botella, pérdida de información.

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
18
De las simulaciones, se obtuvo una ecuación que modela el comportamiento del proceso de recolección de la información. Está ecuación indica el tamaño de buffer requerido de acuerdo al número de sensores, bit generado por sensor y frecuencias de barrido.
bSRfI = (15)
donde: I = Tamaño del buffer S = Cantidad de sensores colocados R = Bits generados por el sensor fb = Frecuencia de barrido
REFERENCIAS Muriá D. y González R. (1995). “Propiedades dinámicas de edificios de la ciudad de México”. Revista de ingeniería sísmica. No.51 pp 25-45.
Meli R., Rivera D., Sánchez R. y Miranda E.. (2001).”Instrumentación sísmica de la catedral metropolitana resultados 1997-2000”. Revista de ingeniería sísmica. No.65 pp 17-48.
Alcántara L., Muriá D., Vázquez R., Macías M.A., Almora D., Torres M., Velasco J.M., Castro G., Ayala M. y Sandoval H. (2004). “Instrumentación sísmica de un edificio de telecomunicaciones”. Memorias del Congreso de Ingeniería Estructural. Acapulco Guerrero.
Shah P. C. y Udwandia F.E. (1978). “A methodology for optimal sensor locations for Identification of dinamic systems”. J. Appl. Mech., Vol 45. pp 188-196.
Udwandia F.E. (1994). “Methodology for optimal sensor locations for parameter identification in dynamic systems”, Jornal of ingineering Mechanics, ASCE, Vol 120, pp 368-390.
Heredia Z. E.(1996). “Optimal instrumentation of structural systems”. Proc. 11th. World conf. on earthquake engineering, Acapulco, México.
Heredia Z. E, R. M. Iturrizaga y L. Esteva. (1999) “Optimal intrumentation of structures on flexible base for system identification”, Earthquake Engng. and estruct. Dyn. Vol 28, pp 1471-1482.
Ka-Veng Yuen, Lambros S. Katafygiotis, Costas Papadimitriou y Neil C. Mickleborough. (2001). “Optimal sensor placement methodology for identification with unmeasured excitation”. Jornal of Dynamic Systems Measurement and Control , ASME, Vol. 123, pp 667-686.
Cherng A.P. (2003). “Optimal sensor placement for modal parameter identification using signal subspace correlation techniques”. Mechanical systems and signal processing. Vol 7(2). pp 361-378. Marcelín J. R. (2004) “Notas para un curso de algoritmos distribuidos”. CINVESTAV-México Departamento de Ingeniería Eléctrica Octubre del 2004

1