Sociedad Mexicana de Ingeniería Estructural DETERMINACIÓN ... · pequeño, las acciones del...
21
1 Sociedad Mexicana de Ingeniería Estructural Sociedad Mexicana de Ingeniería Estructural DETERMINACIÓN DE COEFICIENTES AERODINÁMICOS EN PUENTES FLEXIBLES POR MEDIO DE IDENTIFICACIÓN DE SISTEMAS Hugo Hernández Barrios, 1 José Manuel Jara Guerrero 2 y Salvador Elvira Ceja 3 RESUMEN El tablero de un puente flexible puede presentar inestabilidad aeroelástica dependiendo del valor que tengan sus coeficientes aerodinámicos. Estos coeficientes normalmente se obtienen en pruebas realizadas en un túnel de viento en modelos a escala. En este trabajo se presenta la técnica ARMAX para identificar los parámetros aeroelásticos del tablero de un puente simulando historias de velocidades de viento turbulento. La respuesta analítica se obtiene integrando paso a paso la ecuación de movimiento. Los resultados obtenidos indican que entre los métodos de identificación analizados, el método de Mínimos Cuadrados fue el menos apropiado. ABSTRACT A flexible bridge can be subjected to aero-elastic instability according to the aero-dynamic coefficients values of the deck. Based on the study of scale models in wind tunnel testing the aero-dynamic coefficients are usually obtained. A study aimed at determining the deck aero-elastic parameters using the ARMAX technique and the simulation of velocity time-history of turbulent wind is presented. Time history analyses to determine the analytical response of the model are conducted. Results presented in this study show that among the identification methods analyzed, the least square method was the less suitable. INTRODUCCIÓN En puentes vehiculares diseñados para cubrir grandes claros, como los atirantados, suspendidos y algunos formados por dovelas, la acción del viento sobre ellos genera grandes vibraciones que pueden causarles inestabilidad estructural e incluso el colapso. En algunos casos las acciones del viento pueden ser analizadas como fuerzas estáticas equivalentes, determinadas a partir de la distribución de presiones locales alrededor de la sección transversal del puente; sin embargo, esta consideración simplista no puede ser aplicada para el cálculo de las fuerzas eólicas sobre secciones de puentes con claro considerable. El colapso del primer puente Tacoma, en 1940, fue el punto de inicio de los estudios aeroelásticos en puentes. Increíblemente, este puente inicio su colapso cuando actuaba sobre él una velocidad del viento de 18.8 m/s (Cobo de Arco y Aparicio, 1999). El puente falló por torsión de su cubierta, experimentado su eje transversal un ángulo de más de 30º con respecto a la horizontal (Figura 1). La falla del puente Tacoma, mostró que un puente flexible puede estar bien diseñado y construido para resistir las fuerzas estáticas, incluyendo las del viento, pero si no es diseñado para soportar las excesivas vibraciones producidas por las ráfagas de viento, éste puede ser inestable. El puente Tacoma fue reconstruido en 1950. Con el diseño y construcción de los 1 Profesor Investigador Tiempo Completo, Facultad de Ingeniería Civil, Universidad Michoacana de San Nicolás de Hidalgo, Morelia, Michoacán. Ciudad Universitaria, cp 58000, Teléfono (443)3 22 35 00 ext. 4341, [email protected] 2 Profesor Investigador Tiempo Completo, Facultad de Ingeniería Civil, Universidad Michoacana de San Nicolás de Hidalgo, Morelia, Michoacán. Ciudad Universitaria, cp 58000, Teléfono (443)3 22 35 00 ext. 4338, [email protected] 3 Maestría en Estructuras, División de Estudios de Posgrado, Facultad de Ingeniería Civil, UMSNH, Morelia, Michoacán, Ciudad Universitaria; [email protected]
Transcript of Sociedad Mexicana de Ingeniería Estructural DETERMINACIÓN ... · pequeño, las acciones del...

1
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
DETERMINACIÓN DE COEFICIENTES AERODINÁMICOS EN PUENTES FLEXIBLES POR
MEDIO DE IDENTIFICACIÓN DE SISTEMAS
Hugo Hernández Barrios,1 José Manuel Jara Guerrero 2 y Salvador Elvira Ceja3
RESUMEN El tablero de un puente flexible puede presentar inestabilidad aeroelástica dependiendo del valor que tengan sus coeficientes aerodinámicos. Estos coeficientes normalmente se obtienen en pruebas realizadas en un túnel de viento en modelos a escala. En este trabajo se presenta la técnica ARMAX para identificar los parámetros aeroelásticos del tablero de un puente simulando historias de velocidades de viento turbulento. La respuesta analítica se obtiene integrando paso a paso la ecuación de movimiento. Los resultados obtenidos indican que entre los métodos de identificación analizados, el método de Mínimos Cuadrados fue el menos apropiado.
ABSTRACT A flexible bridge can be subjected to aero-elastic instability according to the aero-dynamic coefficients values of the deck. Based on the study of scale models in wind tunnel testing the aero-dynamic coefficients are usually obtained. A study aimed at determining the deck aero-elastic parameters using the ARMAX technique and the simulation of velocity time-history of turbulent wind is presented. Time history analyses to determine the analytical response of the model are conducted. Results presented in this study show that among the identification methods analyzed, the least square method was the less suitable.
INTRODUCCIÓN
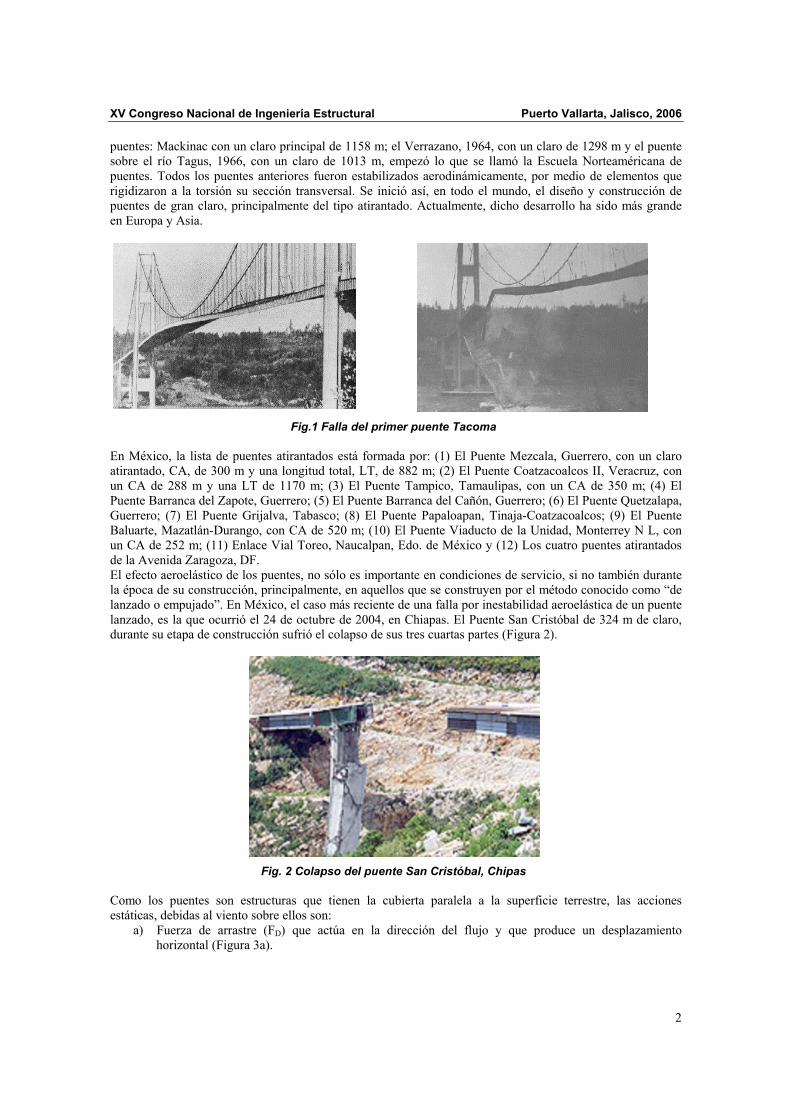
En puentes vehiculares diseñados para cubrir grandes claros, como los atirantados, suspendidos y algunos formados por dovelas, la acción del viento sobre ellos genera grandes vibraciones que pueden causarles inestabilidad estructural e incluso el colapso. En algunos casos las acciones del viento pueden ser analizadas como fuerzas estáticas equivalentes, determinadas a partir de la distribución de presiones locales alrededor de la sección transversal del puente; sin embargo, esta consideración simplista no puede ser aplicada para el cálculo de las fuerzas eólicas sobre secciones de puentes con claro considerable. El colapso del primer puente Tacoma, en 1940, fue el punto de inicio de los estudios aeroelásticos en puentes. Increíblemente, este puente inicio su colapso cuando actuaba sobre él una velocidad del viento de 18.8 m/s (Cobo de Arco y Aparicio, 1999). El puente falló por torsión de su cubierta, experimentado su eje transversal un ángulo de más de 30º con respecto a la horizontal (Figura 1). La falla del puente Tacoma, mostró que un puente flexible puede estar bien diseñado y construido para resistir las fuerzas estáticas, incluyendo las del viento, pero si no es diseñado para soportar las excesivas vibraciones producidas por las ráfagas de viento, éste puede ser inestable. El puente Tacoma fue reconstruido en 1950. Con el diseño y construcción de los
1 Profesor Investigador Tiempo Completo, Facultad de Ingeniería Civil, Universidad Michoacana de San
Nicolás de Hidalgo, Morelia, Michoacán. Ciudad Universitaria, cp 58000, Teléfono (443)3 22 35 00 ext. 4341, [email protected]
2 Profesor Investigador Tiempo Completo, Facultad de Ingeniería Civil, Universidad Michoacana de San
Nicolás de Hidalgo, Morelia, Michoacán. Ciudad Universitaria, cp 58000, Teléfono (443)3 22 35 00 ext. 4338, [email protected]
3 Maestría en Estructuras, División de Estudios de Posgrado, Facultad de Ingeniería Civil, UMSNH,
Morelia, Michoacán, Ciudad Universitaria; [email protected]
XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
2
puentes: Mackinac con un claro principal de 1158 m; el Verrazano, 1964, con un claro de 1298 m y el puente sobre el río Tagus, 1966, con un claro de 1013 m, empezó lo que se llamó la Escuela Norteaméricana de puentes. Todos los puentes anteriores fueron estabilizados aerodinámicamente, por medio de elementos que rigidizaron a la torsión su sección transversal. Se inició así, en todo el mundo, el diseño y construcción de puentes de gran claro, principalmente del tipo atirantado. Actualmente, dicho desarrollo ha sido más grande en Europa y Asia.
Fig.1 Falla del primer puente Tacoma
En México, la lista de puentes atirantados está formada por: (1) El Puente Mezcala, Guerrero, con un claro atirantado, CA, de 300 m y una longitud total, LT, de 882 m; (2) El Puente Coatzacoalcos II, Veracruz, con un CA de 288 m y una LT de 1170 m; (3) El Puente Tampico, Tamaulipas, con un CA de 350 m; (4) El Puente Barranca del Zapote, Guerrero; (5) El Puente Barranca del Cañón, Guerrero; (6) El Puente Quetzalapa, Guerrero; (7) El Puente Grijalva, Tabasco; (8) El Puente Papaloapan, Tinaja-Coatzacoalcos; (9) El Puente Baluarte, Mazatlán-Durango, con CA de 520 m; (10) El Puente Viaducto de la Unidad, Monterrey N L, con un CA de 252 m; (11) Enlace Vial Toreo, Naucalpan, Edo. de México y (12) Los cuatro puentes atirantados de la Avenida Zaragoza, DF. El efecto aeroelástico de los puentes, no sólo es importante en condiciones de servicio, si no también durante la época de su construcción, principalmente, en aquellos que se construyen por el método conocido como “de lanzado o empujado”. En México, el caso más reciente de una falla por inestabilidad aeroelástica de un puente lanzado, es la que ocurrió el 24 de octubre de 2004, en Chiapas. El Puente San Cristóbal de 324 m de claro, durante su etapa de construcción sufrió el colapso de sus tres cuartas partes (Figura 2).
Fig. 2 Colapso del puente San Cristóbal, Chipas Como los puentes son estructuras que tienen la cubierta paralela a la superficie terrestre, las acciones estáticas, debidas al viento sobre ellos son:
a) Fuerza de arrastre (FD) que actúa en la dirección del flujo y que produce un desplazamiento horizontal (Figura 3a).

3
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
b) Fuerza de Levantamiento (FL) que actúa perpendicular a la dirección del flujo y que genera un desplazamiento vertical de la cubierta (Figura 3b).
c) Momento Torsionante o Rotación (MT), producido por la fuerza resultante del flujo, cuando ésta no coincide con el centroide de la sección de la cubierta (Figura 3c).
(a) Fuerza de arrastre (b) Fuerza de levante (c) Rotación de la cubierta
Fig. 3 Fuerzas cuasiestáticas del viento sobre el tablero de un puente Es posible determinar el coeficiente de arrastre si se conoce la distribución de presiones alrededor de un cuerpo, pero también es posible obtenerlo al medir el arrastre total de un modelo de la sección en una prueba de túnel de viento. En forma estática es posible obtener los coeficientes adimensionales por unidad de longitud, de arrastre (CD), de levantamiento (CL) y de momento (CM) con las siguientes expresiones (Simiu y Scanlan, 1996):
212
DD
FC
U Hρ= (1)
212
LL
FC
U Bρ= (2)
2 212
TM
MC
U Bρ= (3)
En donde ρ es la densidad del aire, U la velocidad media del viento, H y B son la altura y ancho de la cubierta del puente, respectivamente. Un cuerpo situado en una corriente de viento está sometido a cargas de presión sobre su superficie producidas por el fluido. Si el flujo incidente es turbulento, la turbulencia además de afectar el valor de la carga de viento estática será también una fuente de cargas dependientes del tiempo. Si el cuerpo se mueve o se deforma bajo las fuerzas producidas por el viento, al cambiar las condiciones de contorno para el flujo, se modifican las fuerzas aerodinámicas que el fluido ejerce sobre el obstáculo, lo que a su vez afecta los desplazamientos del cuerpo, a esta interacción se le llama Aeroelasticidad. Si las deformaciones o los desplazamientos del obstáculo siguen aumentando se dice que se presenta el fenómeno de inestabilidad aeroelástica. La inestabilidad aeroelástica involucra fuerzas aerodinámicas que actúan sobre el cuerpo como consecuencia de su movimiento y se les denomina autoexitadas y normalmente genera vibraciones de gran amplitud. En el caso del tablero de un puente los efectos del componente de la presión constante del viento y de las fluctuaciones, son muy bajos en comparación con los efectos de cargas estáticas y de cargas dinámicas debido al tránsito de vehículos sobre el puente. Los fenómenos de inestabilidad aeroelástica se clasifican como:
a) Desprendimiento de torbellinos. b) Galopeo transversal. c) Galopeo inducido por una estela. d) Divergencia a torsión. e) Flambeo, “flutter” o aleteo. f) Bataneo o “buffeting”.
En el caso de tableros de puentes son típicos los problemas de inestabilidad de Divergencia a torsión, “flutter” y “buffeting”. Cuando sobre el tablero de un puente incide una corriente de viento con una ángulo de ataque pequeño, las acciones del viento sobre el tablero se traducirán en una fuerza, con componentes en la dirección
XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
4
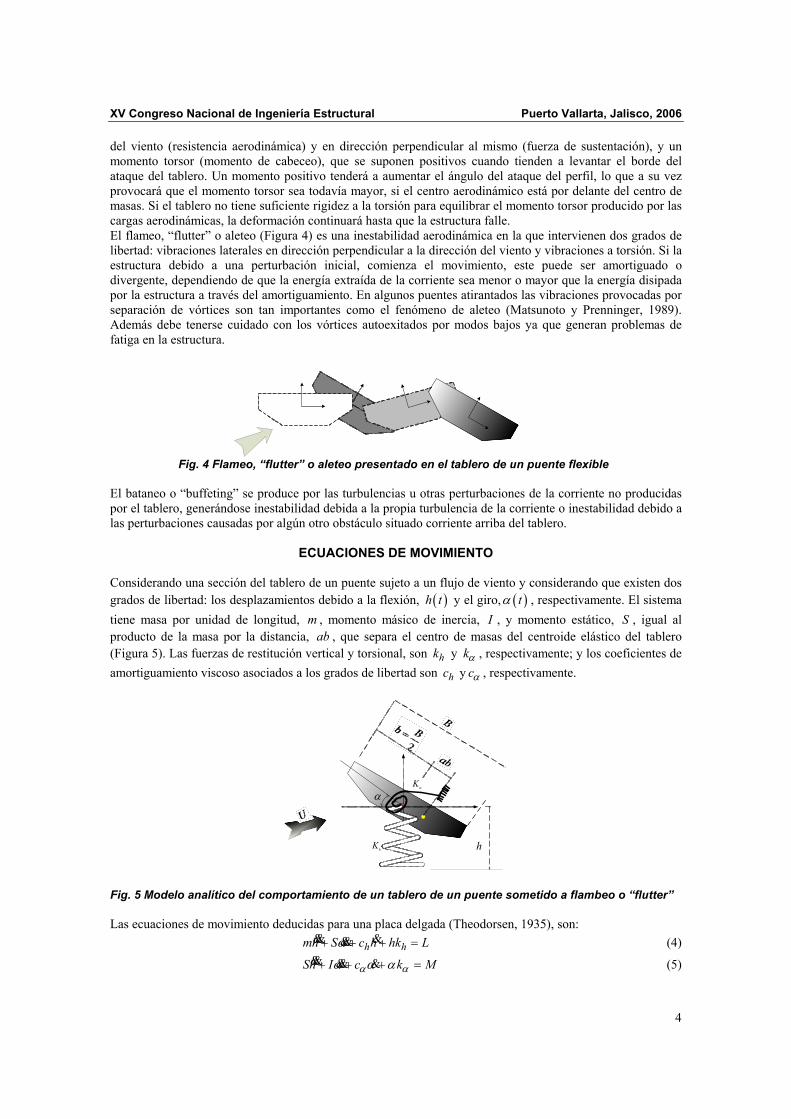
del viento (resistencia aerodinámica) y en dirección perpendicular al mismo (fuerza de sustentación), y un momento torsor (momento de cabeceo), que se suponen positivos cuando tienden a levantar el borde del ataque del tablero. Un momento positivo tenderá a aumentar el ángulo del ataque del perfil, lo que a su vez provocará que el momento torsor sea todavía mayor, si el centro aerodinámico está por delante del centro de masas. Si el tablero no tiene suficiente rigidez a la torsión para equilibrar el momento torsor producido por las cargas aerodinámicas, la deformación continuará hasta que la estructura falle. El flameo, “flutter” o aleteo (Figura 4) es una inestabilidad aerodinámica en la que intervienen dos grados de libertad: vibraciones laterales en dirección perpendicular a la dirección del viento y vibraciones a torsión. Si la estructura debido a una perturbación inicial, comienza el movimiento, este puede ser amortiguado o divergente, dependiendo de que la energía extraída de la corriente sea menor o mayor que la energía disipada por la estructura a través del amortiguamiento. En algunos puentes atirantados las vibraciones provocadas por separación de vórtices son tan importantes como el fenómeno de aleteo (Matsunoto y Prenninger, 1989). Además debe tenerse cuidado con los vórtices autoexitados por modos bajos ya que generan problemas de fatiga en la estructura.
Fig. 4 Flameo, “flutter” o aleteo presentado en el tablero de un puente flexible El bataneo o “buffeting” se produce por las turbulencias u otras perturbaciones de la corriente no producidas por el tablero, generándose inestabilidad debida a la propia turbulencia de la corriente o inestabilidad debido a las perturbaciones causadas por algún otro obstáculo situado corriente arriba del tablero.
ECUACIONES DE MOVIMIENTO Considerando una sección del tablero de un puente sujeto a un flujo de viento y considerando que existen dos grados de libertad: los desplazamientos debido a la flexión, ( )h t y el giro, ( )tα , respectivamente. El sistema tiene masa por unidad de longitud, m , momento másico de inercia, I , y momento estático, S , igual al producto de la masa por la distancia, ab , que separa el centro de masas del centroide elástico del tablero (Figura 5). Las fuerzas de restitución vertical y torsional, son hk y kα , respectivamente; y los coeficientes de amortiguamiento viscoso asociados a los grados de libertad son hc y cα , respectivamente.
hK
Kα
α
h
Fig. 5 Modelo analítico del comportamiento de un tablero de un puente sometido a flambeo o “flutter” Las ecuaciones de movimiento deducidas para una placa delgada (Theodorsen, 1935), son:
h hmh S c h hk Lα+ + + =&& &&& (4)
Sh I c k Mα αα α α+ + + =&& && & (5)

5
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
Donde los puntos sobre las literales significan derivadas con respecto al tiempo, L y M son la fuerza aerodinámica autoexitable, y el momento alrededor del eje de rotación por unidad de longitud, respectivamente. Definiendo el cuadrado de la frecuencia por flexión, 2
hω , y por torsión, 2αω , de la cubierta
como: 2 hh
km
ω = (6)
2 kIαωα = (7)
Las ecuaciones (4) y (5) se pueden escribir como: 22m h a h h Lh h hα ξ ω ω + + + =
&& &&& (8)
22g
aI h Mr α α αα ξ ω α ω α
+ + + =
&& & (9)
Donde gr es el radio de giro de la cubierta alrededor del centro de rotación, hξ y αξ son la relación de amortiguamiento con respecto al crítico en flexión y en rotación, respectivamente. En el caso de tableros de puentes simétricos, el centro de masas está en el plano vertical y coincide con el centroide; en cuyo caso 0a = , por lo que las ecuaciones de movimiento son:
22 h h hm h h h Lξ ω ω + + = && & (10)
22I Mα α αα ξ ω α ω α + + = && & (11)
Las fuerzas aerodinámicas para el modelo con dos grados de libertad (Simiu y Scanlan, 1996) son: ( ) ( )ae bL L x,t L x,t= + (12)
( ) ( )ae bM M x,t M x,t= + (13) Donde aeL y aeM son la fuerza aeroelástica autoexitable bajo un movimiento senoidal y el momento debido al giro, respectivamente, ambos casos son por unidad de longitud del tablero del puente. Estas fuerzas se pueden expresar como:
2 2 21 2 3 4
1 22
* * * *ae
h B hL U B kH kH k H k HU U B
ρ α α
= + + +
&& (14.1)
2 2 2 21 2 3 4
12
* * * *ae
h B hM U B kA kA k A k AU U B
ρ α α
= + + +
&& (14.2)
En las ecuaciones (14.1) y (14.2) se definió la frecuencia reducida como: ( )2B nBk
U Uπω
= = (15)
Donde B es el ancho del tablero del puente en la dirección del viento, U es la velocidad promedio del viento y ω ( )rad / s es la frecuencia circular de la oscilación debida al “flutter”, ( )1n / s es la frecuencia natural de
vibración autoexitada. Los coeficientes *iH y *
iA ( )1 2 3 4i , , ,= son funciones adimensionales de k , se obtienen experimentalmente en modelos de puentes probados en un túnel de viento y representan derivadas debido al “flutter”. Están definidos para el caso de puentes (Simiu y Scanlan, 1996) como:
21 2*k H kFπ= − (16.1)
22
412
* k Gk H Fk
π = − + + (16.2)
23 2
2* Gkk H Fπ = − −
(16.3)
2 24
412
* Gk H kk
π = + (16.4)

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
6
21 2*k A kFπ= (16.5)
22 2 4 4* F kFk A Gπ = − − −
(16.6)
22
3 2 32 4* k kGk A Fπ = + −
(16.7)
[ ]24 2*k A kGπ= − (16.8)
En la Figura 6 (Simiu y Scanlan, 1996) se observan los coeficientes aerodinámicos *iH y *
iA ( )1 2 3 4i , , ,= los cuales se obtuvieron para los modelos de tableros de puentes de la figura y se comparan con los obtenidos en Aerodinámica para un ala de avión ( )1 2 3 4i , , ,= . Estos coeficientes se presentan en función de la velocidad reducida (adimensional) definida como:
RUvnB
= (17)
En el caso de puentes atirantados con forma de celosía abierta, los coeficientes 2*A (amortiguamiento a
torsión) cambian de signo de negativo a positivo cuando aumenta la velocidad reducida del viento, produciéndose un movimiento de rotación que se vuelve inestable debido al amortiguamiento negativo de torsión (Meseguer et al., 2001).
En las ecuaciones (14.1) y (14.2) los términos: ( )x,tα , ( )h x,tU
& y ( )B x,t
Uα& , son adimensionales y
representan ángulos de incidencia del viento. Los factores k que preceden a los coeficientes *iH y *
iA
( )1 2 3 4i , , ,= pueden ser incluidos con estos últimos como coeficientes totales mediante otra notación, sin embargo, en la literatura aparecen como adimensionales. En las ecuaciones (12) y (13), bL y bM , representan la fuerza debida al “buffeting” por levante y de momento debido al giro, respectivamente; ambos por unidad de longitud del tablero del puente. Estas fuerzas se pueden expresar como:
( ) ( )21 22
Lb L D
u x,t v x,tdCL U B C C
U d Uρ
α = + +
(18.1)
( ) ( )2 21 22
Mb M
u x,t v x,tdCM U B C
U d Uρ
α
= +
(18.2)
Donde DC , LC y MC son los coeficientes estáticos debidos a la fuerza de arrastre, de levante y de cabeceo del tablero del puente y se obtienen de las ecuaciones (1), (2) y (3), respectivamente. Se consideran independientes de la frecuencia. Los términos ( )u x,t y ( )v x,t son las componentes de la turbulencia del viento en las direcciones lateral y vertical, respectivamente. Las ecuaciones (18.1) y (18.2) describen la relación entre la velocidad media y las fluctuaciones debidas a las ráfagas del viento. En las expresiones (12) y (13) se supone que no hay interacción entre las fuerzas aeroelásticas (ae) y las de “buffeting” (b). Esta circunstancia es parcialmente compensada ya que las fuerzas aeroelásticas son calculadas en flujo turbulento, además las fuerzas de “buffeting” son expresadas de manera que expresan la dependencia de las fluctuaciones de ráfaga (en el tiempo) y los coeficientes estáticos de las fuerzas, DC , LC y MC .

7
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
(a) Coeficientes *
iA (i=1,2,3,4) (b) Coeficientes *iH (i=1,2,3,4)
Fig. 6 Coeficientes aerodinámicos obtenidos en pruebas de túnel de viento Las ecuaciones (12) y (13) se pueden escribir:
( ) ( )1 2 3 4 1 2L H h H H h H B u t B v tα α= + + + + +& & (19)
( ) ( )1 2 3 4 3 4M A h A A h A B u t B v tα α= + + + + +& & (20) Por lo que las ecuaciones de movimiento (4) y (5), son:
( ) ( )21 2 3 4 1 22 h h hm h h h H h H H h H B u t B v tξ ω ω α α + + = + + + + +
&& & & & (21)
( ) ( )21 2 3 4 3 42I A h A A h A B u t B v tα α αα ξ ω α ω α α α + + = + + + + +
&&& & & (22)
Dividiendo (21) entre m y (22) entre I , y ordenando términos:
( ) ( )2 31 2 4 1 22 h h hHH H H B B
h h h u t v tm m m m m m
ξ ω α ω α + − − + − − = + && & & (23)

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
8
( ) ( )23 31 2 4 42A BA A A B
h h u t v tI I I I I Iα α αα α ξ ω α ω − + − − + − = +
&&& & (24)
Que en forma matricial se escribe: 2 31 2 4
21 2 3 4
21 00 1
2
h h hHH H H
hh hm m m mA A A AI I I Iα α α
ξ ω ω
αα αξ ω ω
− − − − + + =
− − − −
&& &
&& &
( )( )
1 2
3 4
B Bu tm mv tB B
I I
(25)
En la ecuación (25) los valores de los coeficientes son: 2
1 1
12 2 *
U BH kH
U
ρ = (26.1)
2 2
2 2
12 *
U BH kH
U
ρ = (26.2)
22
3 4
12 *
U BH k H
B
ρ = (26.3)
2 24 3
12
*H U B k Hρ = (26.4)
2 2
1 1
12 *
U BA kA
U
ρ = (27.1)
2 22 2
12
*BA U B kAU
ρ = (27.2)
2 22
3 4
12 *
U BA k A
B
ρ = (27.3)
2 2 24 3
12
*A U B k Aρ = (27.4)
[ ]2
1
12 2 L
U BB C
U
ρ= (28.1)
2
2
12 L
D
U B dCB C
U d
ρ
α = +
(28.2)
[ ]2 2
3
12 2 M
U BB C
U
ρ= (28.3)
2 2
4
12 M
U B dCB
U d
ρ
α =
(28.4)
La densidad del aire en 24
kg sm
se obtiene con la expresión:

9
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
( )( )13 6
287 1 273P .. T
ρ =+
(29)
En donde P es la presión atmosférica en mm de Mercurio, T es la temperatura ambiente en grados centígrados y 287.1 es la constante del aire.
IDENTIFICACIÓN DE SISTEMAS La importancia de la Identificación de Sistemas en la ingeniería estructural, se ha incrementado en los últimos años, debido principalmente por la necesidad de conocer más racionalmente las estructuras y sus características dinámicas. Un sistema dinámico de n grados de libertad se representa por la ecuación de movimiento:
[ ] [ ] [ ][ ] [ ]{ }o o o oM X C X K X L f + + = && & (30)
Donde [ ]X es el vector que representa la respuesta, { }f es el vector columna que representa la excitación y
[ ]oM , [ ]oC , [ ]oK y [ ]oL son matrices con dimensiones nxn . Se supone que los valores de la excitación,
{ }f se obtiene de forma exacta y que puede discretizarse, tal que se conocen los valores de ( ){ }f i t∆ en
cada instante t i t= ∆ , y que la respuesta [ ]X puede obtenerse una vez conocida la excitación. Debido a que todo proceso de medición está sujeto a errores e imperfecciones y que los aparatos de medición registran señales ruidosas o contaminadas, es necesario considerar esas variaciones en las señales. En este caso la excitación puede obtenerse agregándole ruido, ( )tη , en cada instante, tal que:
( ) ( ) ( )Y i X i iη= + (31) Donde,
( ) ( )X i X i t= ∆ (32)
( )Y i es el vector columna que contiene n − observaciones, una en cada instante t i t= ∆ , y ( )iη es el vector columna con n − observaciones “contaminadas” con ruido Gaussiano, en cada t i t= ∆ , independiente de ( )X i y de ( ){ }f i , con media cero y matriz de covarianza finita η∇ . Esta última hipótesis es aceptada en diversos trabajos matemáticos (Lawrence, 1987). El problema de identificación consiste en estimar los parámetros desconocidos, con base en una secuencia de:
[ ] ( ) ( ) ( ) ( )1 2 3NY Y Y Y .... Y N= (33)
{ } ( ) ( ) ( ) ( )1 2 3Nf f f f .... f N= (34) Para asociar el problema de identificación con la solución única de la ecuación de movimiento (30), se supone que una de las matrices [ ]oM , [ ]oC , [ ]oK y [ ]oL es conocida. Entonces la ecuación (30) escribe como:
[ ] [ ] [ ] [ ] [ ] [ ][ ] [ ] [ ]{ }1 1 1 1o o o o o o o oM M X M C X M K X M L f− − − − + + =
&& & (35) O bien:
[ ] [ ][ ] [ ]{ }X J X K X L f + + = && & (36)
Donde:
[ ] [ ] [ ]1o oJ M C−= (37)
[ ] [ ] [ ]1o oK M K−= (38)
[ ] [ ] [ ]1o oL M L−= (39)
Ya que los datos observados de la excitación y los valores de la respuesta están discretizados cada instante, es más conveniente reescribir las ecuaciones 31 y 36, en la forma de una ecuación de estado discretizada en el tiempo y utilizar un modelo ARMAX (Auto-Regressive and Moving-Averaging).

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
10
ECUACIÓN DE ESTADO Si definimos un vector de estado:
[ ] XZ
X
= & (40)
La ecuación 31 se escribe: ( ) [ ] ( ) ( )0Y i I Z i iη= + (41)
Y la ecuación 36,
{ }0 0I XX
fK J X LX
= + − −
&&&& (42)
Ó bien, considerando el vector de estado, 40, [ ][ ] [ ]{ }Z Z T f = Φ +
& (43) Y la ecuación 41, como:
( ) [ ] ( ) ( )Y i C Z i iη= + (44) Donde:
[ ] 0 IK J
Φ = − −
(45)
[ ] 0T
L
=
(46)
[ ] [ ]0C I= (47)
( ) ( )Z i Z i t= ∆ (48)
Considerando que ( ){ }f t es constante e igual a ( )f i en el intervalo ( )( ) i+1i t , t∆ ∆ entonces la ecuación 43 puede modificarse en la forma discretizada siguiente (Shinozuka, Yun y Imai, 1978):
( ) [ ] ( ) [ ] ( ){ }1Z i A Z i B f i+ = + (49) Donde:
[ ] [ ]0
tB e d Tτ τ
∆Φ
= ∫
(50)
[ ] tA eΦ∆= (51) Que por definición (Gantmacher, 1960):
[ ] ( ) ( )2 32 3
2 3t t t
A e I t ...! !
Φ∆ ∆ ∆= = +Φ∆ +Φ +Φ + (52)
Además se supone que el sistema es controlable, con índice de observabilidad igual a 2 (Chen, Desoír y Niederlinski, 1966). Esta suposición implica que la matriz de controlabilidad R , queda definida como:
2 1nR B AB .... A B− = (53)
Con rango 2n y se define una nueva matriz no singular:
[ ] CQ
CA
=
(54)
Usando la matriz, [ ]Q , las ecuaciones 44 y 49, pueden escribirse en su forma canónica:
( ) [ ] ( ) [ ] ( ){ }1c c c cZ i A Z i B f i+ = + (55)
( ) [ ] ( ) ( )cY i C Z i iη= + (56) Donde:
[ ] [ ][ ]cZ Q Z= (57)

11
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
[ ] [ ][ ]CB Q B= (58)
[ ] [ ][ ][ ] 1
2 1
0C
IA Q A Q
F F−
= =
(59)
Con el propósito de estimar los parámetros, se utilizará el modelo ARMAX escrito en términos de las cantidades observables, tales como la excitación-respuesta y términos observables del ruido. El modelo ARMAX se obtiene eliminado ( )Z i de las ecuaciones 55 y 56 (Shinozuka, Yun e Imai, 1978):
( ) ( ) ( ) ( ) ( ) ( )1 2 1 21 2 1 2Y i F Y i F Y i G f i G f i W i= − + − + − + − + (60) Donde 1F y 2F están definidos en 59 y,
[ ]1
2 1
0c
G IB
G F I
= − (61)
Y, ( ) ( ) ( ) ( )1 21 2W i i F i F iη η η= − − − − (62)
Aplicando la técnica de identificación de parámetros, ARMAX, se podrían obtener los parámetros desconocidos 1F , 2F , 1G y 2G , sin embargo, los parámetros de la ecuación 36 no son fácilmente recuperables con un proceso inverso del procedimiento anterior, debido a que es difícil resolver de 59 la matriz [ ]A . Sin embargo se puede aplicar el siguiente procedimiento (Yun y Shinuzuka, 1990):
Se construyen las matrices [ ]cA y [ ]cB de las ecuaciones 59 y 61,
[ ]2 1
0c
IA
F F
=
(63)
[ ] 1
1 2
0c
I GB
F I G
=
(64)
Se evalúan las matrices
[ ] [ ]ln cc
AQ
t=
∆ (65)
[ ] [ ]1
0c
tc cT e d Bτ τ
−∆ Φ = ∫
(66)
Considerando que,
[ ] ( )[ ]1
1ln 1
pcp
cp
A IA
p
∞ −
=
− = −∑ (67)
Se realiza la siguiente transformación de coordenadas
[ ] [ ]1* *
cQ Q−
Φ = Φ (68)
[ ] [ ] e*c
LT Q T
L = =
(69)
Donde:
[ ] 1*
c
CQ
C− = = Φ Φ
(70)
La matriz [ ]eL sirve como una medida del error y puede estar formada por ceros, aunque habitualmente no es así. El procedimiento anterior supone que el sistema es observable con un índice de 2, si el índice p es mayor que 2, el sistema debe se representado por un modelo ARMAX de orden p − ésimo, lo cual crea algunas dificultades. En este trabajo los métodos de identificación de parámetros utilizados son: a) El Método Ordinario de Mínimos Cuadrados (OLS) b) El Método de la Variable Instrumental (IV)

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
12
c) El Método de Máxima Verosimilitud usando la estimación de IV como suposición inicial (ML-A) d) El Método de Máxima Verosimilitud usando una suposición inicial de datos estructurales (ML-B) e) El Método de Máxima Verosimilitud con Información Limitada usando la estimación de IV como suposición inicial (LIML-A) f) El Método de Máxima Verosimilitud con Información Limitada usando una suposición inicial de datos estructurales (LIML-B) SIMULACIÓN DE LA EXCITACIÓN EÓLICA Existen dos criterios para definir matemáticamente la variación de la velocidad media del viento con la altura: un modelo tipo exponencial y el tipo logarítmico. En este trabajo se utiliza la variación exponencial para definir la velocidad media con la altura (MDOC, 1993) mediante la ecuación 71 en la que la velocidad media a una altura z sobre el nivel del terreno se expresa con:
10 10zzV V
α =
(71)
donde zV es la velocidad media a una altura z, 10V es la velocidad media de referencia a 10 m de altura y α es una constante que dependen del tipo de terreno (MDOC, 1993). Davenport (1961) analizó densidades espectrales de numerosos registros de viento a diversas alturas, con base en éstos propuso las expresiones 72 y 73 para representar la función de densidad espectral de la velocidad del viento en la dirección longitudinal para alturas de 8 a 150 m y la función de densidad espectral de la velocidad del viento en la dirección vertical, respectivamente,
2
2 42 3
10
4( )
1
ukS
V
ωωπ
ωπ
=
+
l
l
(72)
( )( )210
1.667
3.36 12
1 102
vz
z
z kVS
V zV
ωπ ω
π
= +
(73)
Donde ω la frecuencia en rad/s, 10V es la velocidad media a una altura de referencia de 10m y l es la longitud característica, con un valor de 1200m. Existen diversas técnicas para simular ráfagas de viento, en este trabajo se utilizará la simulación por medio de ráfagas por series de Fourier, a partir de procesos aleatorios por medio del método de Goto y Toki (1969) y con el planteamiento propuesto por Shinozuka (1985), de esta forma los cálculos se realizan por medio de la Transformada Rápida de Fourier y se reduce el tiempo de cálculo empleando las ecuaciones 74 y 75:
( )1
( ) 2 ( ) cos 2N
u k k kk
u t S n n n tπ φ=
= ∆ +∑ (74)
( )1
( ) 2 ( ) cos 2N
v i i ii
v t S n n n tπ φ=
= ∆ +∑ (75)
donde ( )u t y ( )v t son las velocidades de ráfaga en la dirección horizontal y vertical, respectivamente, N es el número total de intervalos, n es la frecuencia de los intervalos n∆ ; kφ y iφ son ángulos de fase aleatorios distribuidos uniformemente entre 0 y 2π . EJEMPLO DE APLICACIÓN Considerando que el tablero del puente se encuentra ubicado a 30m de altura, y sometido a una velocidad
media de 10 39 mVs
= 140 kmh
, ubicado en terreno abierto, Tipo C, es decir, con 0.16α = y rugosidad

13
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
0.005k = , las historias de velocidades simuladas en las direcciones horizontal y vertical, respectivamente, se muestran en las Figuras 7ay 7b,
-20
-15
-10
-5
0
5
10
15
20
0 20 40 60 80 100tiempo (s)
Velo
cida
d (m
/s)
(a) Historia sintética de la turbulencia del viento en la dirección horizontal
-15
-10
-5
0
5
10
15
0 20 40 60 80 100
tiempo (s)
Velo
cida
d (m
/s)
(b) Historia sintética de la turbulencia del viento en la dirección vertical Fig. 7 Historias sintéticas de turbulencia de viento
Considerando las siguientes propiedades geométricas del tablero de un puente de 9m de longitud, 9B m= ,
21485 s kgm
m= ,
25,645,260o
kgsIcm
= , y las propiedades dinámicas 2.375 radsαω = , 1.165h
rads
ω = y
1.765 rads
ω = . Se suponen conocidos los siguientes valores, con el único fin de mostrar un ejemplo de
aplicación, aunque en realidad son los parámetros a determinar: 0.212LC = (76.1) 0.34DC = (76.2)
3.83LdCdα
= − (76.3)
0.10MC = (76.4)
0.111MdCdα
= − (76.5)
2.019UnB
= (76.6)
3.112k = (76.7) *1 0.7076H = − (76.8) *2 0.074H = (76.9)
XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
14
*3 0.958H = (76.10) *4 0.1978H = (76.11)
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 20 40 60 80 100
tiempo (s)
Res
pues
ta v
ertic
al (m
)
(a) Respuesta del tablero del puente en la dirección horizontal
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0 20 40 60 80 100
tiempo (s)
Cab
eceo
(rad
)
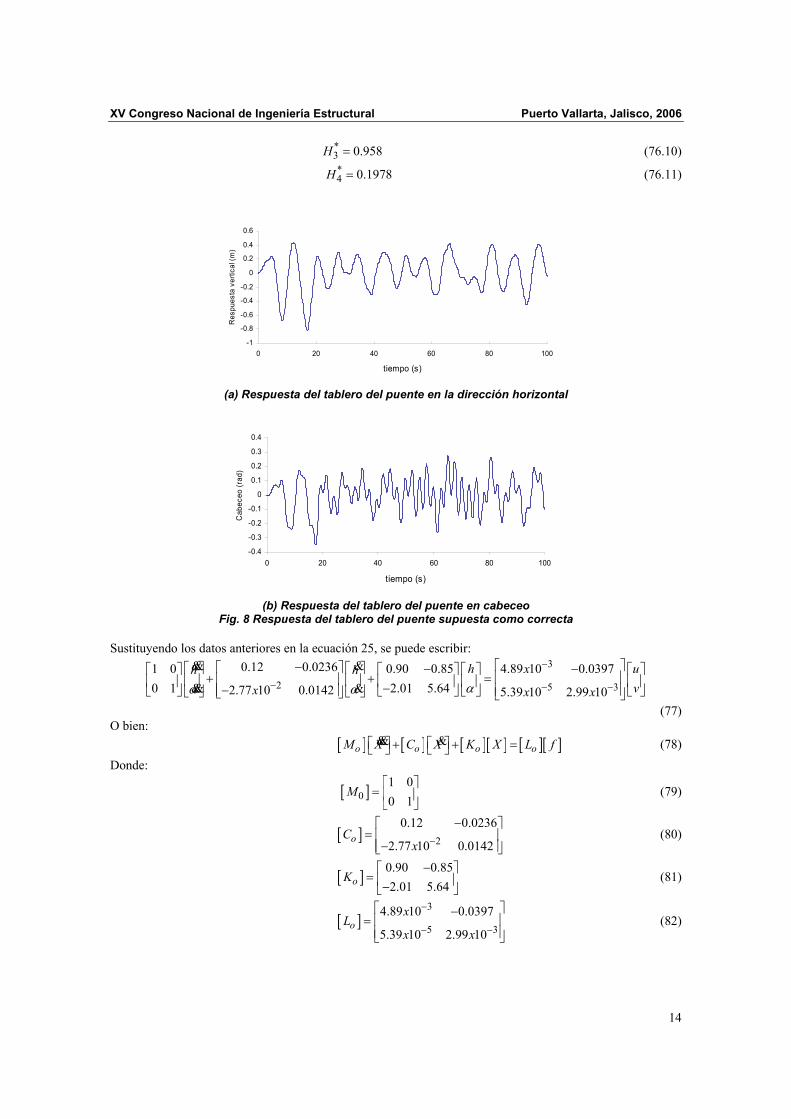
(b) Respuesta del tablero del puente en cabeceo Fig. 8 Respuesta del tablero del puente supuesta como correcta
Sustituyendo los datos anteriores en la ecuación 25, se puede escribir:
3
2 5 3
0.12 0.02361 0 0.90 0.85 4.89 10 0.03970 1 2.01 5.642.77 10 0.0142 5.39 10 2.99 10
h x uh hvx x xαα α
−
− − −
− − − + + = −−
&& &
&& &
(77) O bien:
[ ] [ ] [ ][ ] [ ][ ]o o o oM X C X K X L f + + = && & (78)
Donde:
[ ]01 00 1
M =
(79)
[ ] 2
0.12 0.0236
2.77 10 0.0142oCx −
− =
− (80)
[ ] 0.90 0.852.01 5.64oK
− = −
(81)
[ ]3
5 3
4.89 10 0.0397
5.39 10 2.99 10o
xL
x x
−
− −
− =
(82)

15
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
Considerando la historias sintéticas de velocidades de viento, considerando turbulencia, en las direcciones horizontales, ( )u t , y verticales, ( )v t , la solución “exacta” de la ecuación 77 se puede obtener por integración numérica. La historia del desplazamiento vertical y por cabeceo, del tablero del puente se grafica en la Figura 8. Con el fin de realizar la comprobación de la técnica de identificación, la respuesta supuesta como correcta se “contaminara” con el 1%, 3% y 6% de ruido, según la ecuación 31. En las Tablas 1 a 3 se muestran los resultados de los parámetros identificados, con los métodos OLS, IV, ML-A, ML-B, LIML-A y LIML-B, para el 1%, 3% y 6% de ruido en la respuesta, respectivamente. En la Figura 9 se muestran los resultados de las historias de la respuestas contaminadas con un 6% de ruido, las respuestas supuestas y la calculada con los parámetros estructurales identificados del tablero del puente, con los métodos anteriormente mencionados. Los resultados correspondientes a 1% y 3% de ruido no se muestran por falta de espacio. Como se observa en la Figura 9, con excepción del método de Mínimos Cuadrados, los métodos de identificación de sistemas utilizados en este ejemplo, son adecuados para identificar los parámetros aerodinámicos del tablero del puente. El método de Mínimos Cuadrados, OLS, produce un error significativo en la predicción.
Tabla 1 Resultados considerando 1% de ruido en la respuesta
[ ]oK [ ]oC [ ]oL Valores supuestos
como exactos 0.90 0.852.01 5.64
−−
0.12 0.02360.0277 0.0142
−
−
0.00489 0.03970.0000539 0.00299
−
Desviación estándar
0.186 OLS
0.94 0.9382.02 5.67
− −
0.36 0.1130.046 0.0701
− −
0.00440 0.04290.0000548 0.00397
− −
0.0793 0.255
IV 0.904 0.864
2.01 5.64−
−
0.12 0.02890.0261 0.0129
− −
0.00463 0.03980.0000917 0.00360
− −
0.120 0.254
ML-A 0.898 0.85
2.01 5.64−
−
0.12 0.02950.0188 0.0129
− −
0.00463 0.03980.0000983 0.0036
− −
0.121 0.250
ML-B 0.91 0.8742.01 5.64
− −
0.113 0.02130.0219 0.0139
− −
0.00489 0.03870.000951 0.00297
− −
0.118 0.262
LIML-A 0.909 0.864
2.02 5.63−
−
0.12 0.02910.0281 0.0141
− −
0.00462 0.0408
0.000916 0.0036−
0.123 0.256
LIML-B 0.902 0.846
2.02 5.64−
−
0.124 0.01670.0265 0.0143
− −
0.00489 0.04070.00106 0.004
−
0.124

XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
16
Tabla 2 Resultados considerando 3% de ruido en la respuesta
[ ]oK [ ]oC [ ]oL
Valores supuestos como exactos 0.90 0.85
2.01 5.64−
−
0.12 0.02360.0277 0.0142
−
−
0.00489 0.03970.0000539 0.00299
−
Desviación estándar
0.100 OLS
1.32 1.592.14 5.95
− −
2.10 0.7170.18 0.506
− −
0.000531 0.0714
0.000268 0.00830− −
0.0445 0.277
IV 0.918 0.904
2.01 5.64−
−
0.131 0.04880.0228 0.00957
− −
0.00402 0.04380.000282 0.00516
− −
0.130 0.253
ML-A 0.899 0.88
1.98 5.63−
−
0.132 0.05490.00241 0.0136
− −
0.00407 0.04080.000343 0.00718
− −
0.122 0.251
ML-B 0.896 0.849
2.01 5.65−
−
0.122 0.02390.0189 0.0169
− −
0.00490 0.03970.00296 0.00398
− −
0.119 0.279
LIML-A 0.951 0.9492.05 5.63
− −
0.129 0.04750.0307 0.0143
− −
0.00411 0.04380.00173 0.00516
−
0.130 0.266
LIML-B 0.904 0.841
2.02 5.64−
−
0.110 0.02390.0265 0.0148
− −
0.00489 0.04070.00207 0.00601
−
0.130
Tabla 3 Resultados considerando 6% de ruido en la respuesta
[ ]oK [ ]oC [ ]oL Valores supuestos
como exactos 0.90 0.852.01 5.64
−−
0.12 0.02360.0277 0.0142
−
−
0.00489 0.03970.0000539 0.00299
−
Desviación estándar
0.106 OLS
2.59 3.852.51 6.90
− −
6.24 2.000.463 1.79
− −
0.0228 0.169
0.00182 0.0194− −
0.0398 0.303
IV 0.939 0.96
2.01 5.64−
−
0.168 0.09850.0172 0.00278
− −
0.00291 0.04990.000597 0.00753
− −
0.140 0.258
ML-A 0.901 0.931.94 5.60
− −
0.176 0.09160.0285 0.00658
−
0.00405 0.04480.00187 0.00662
− −
0.121 0.248
ML-B 0.893 0.870
1.99 5.65−
−
0.113 0.02270.0274 0.0147
− −
0.00491 0.03870.00498 0.00499
− −
0.119 0.279
LIML-A 1.24 1.702.01 5.62
− −
0.162 0.07610.0361 0.0214
− −
0.00337 0.04900.00344 0.00847
−
0.120 0.279
LIML-B 0.897 0.847
2.00 5.66−
−
0.110 0.02420.0277 0.0199
− −
0.00489 0.04380.00307 0.0111
−
0.142

17
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 20 40 60 80 100
Tiempo (s)
Des
plaz
amie
nto
verti
cal (
m)
resp + ruido
resp recalculada
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0 20 40 60 80 100
Tiempo (s)
Cab
eceo
(rad
)
resp + ruido
resp recalculada
Respuesta vertical, Método de OLS Cabeceo, Método de OLS
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
0 20 40 60 80 100
Tiempo (s)
Des
plaz
amie
nto
verti
cal (
m)
resp + ruido
resp recalculada
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.10.2
0.30.4
0 20 40 60 80 100
Tiempo (s)
Cab
eceo
(rad
)
resp + ruido
resp recalculada
Respuesta vertical, Método de IV Cabeceo, Método de IV
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 20 40 60 80 100
Tiempo (s)
Des
plaz
amie
nto
verti
cal (
m)
resp + ruido
resp recalculada
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0 20 40 60 80 100
Tiempo (s)
Cab
eceo
(rad
)
resp + ruido
resp recalculada
Respuesta vertical, Método de ML-A Cabeceo, Método de ML-A
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 20 40 60 80 100
Tiempo (s)
Des
plaz
amie
nto
verti
cal (
m)
resp + ruido
resp recalculada
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0 20 40 60 80 100
Tiempo (s)
Cab
eceo
(rad
)
resp + ruido
resp recalculada
Respuesta vertical, Método de ML-B Cabeceo, Método de ML-B
Fig. 9 Comparación de la respuesta con un 6% de ruido y la respuesta calculada
CONCLUSIONES El presente trabajo analiza la aplicación de la técnica ARMAX y varios métodos de identificación se sistemas para determinar los coeficientes aerodinámicos del tablero de un puente flexible. Se estudiaron los métodos: a) Método Ordinario de Mínimos Cuadrados (OLS) b) Método de la Variable Instrumental (IV)
XV Congreso Nacional de Ingeniería Estructural Puerto Vallarta, Jalisco, 2006
18
c) Método de Máxima Verosimilitud usando la estimación de IV como suposición inicial (ML-A) d) Método de Máxima Verosimilitud usando una suposición inicial de datos estructurales (ML-B) e) Método de Máxima Verosimilitud con Información Limitada usando la estimación de IV como suposición inicial (LIML-A) f) Método de Máxima Verosimilitud con Información Limitada usando una suposición inicial de datos estructurales (LIML-B) De acuerdo con los análisis realizados, el método de identificación que más error induce es el de Mínimos Cuadrados. El estudio señala la importancia de la determinación de los coeficientes aerodinámicos del tablero de un puente ya que de ellos depende la estabilidad aeroelástica del mismo. Estos coeficientes normalmente se obtienen en pruebas realizadas en túneles de viento en modelos a escala, sin embargo, como se muestra en este trabajo, es posible calcularlos mediante la técnica de identificación de sistemas de un tablero de un puente real, cuando se conoce la historia de velocidades de viento que incide en el tablero, aún en flujo turbulento, o bien, cuando se conoce la respuesta del tablero en cabeceo y en “buffeting” por medio de instrumentación.
AGRADECIMIENTOS Se agradece a la Coordinación de Investigación Científica de la Universidad Michoacana de San Nicolás de Hidalgo el apoyo proporcionado para la realización de este trabajo.
CITAS, REFERENCIAS Y BIBLIOGRAFÍA
Anónimo (1993), “Manual de Diseño de Obras Civiles, Diseño por Viento”, Comisión Federal de Electricidad, Instituto de Investigaciones Eléctricas, México. Cobo de Arco D. y Aparicio A. (1999), “An analysis of wind stability, improvements to the response of suspension Bridges”, Monografía CIMNE No. 49. Chen C.T., Desoer D. A. y Niederlinski A. (1966), “Simplified Conditions for Controllability and Observability of Linear Time Invariant Systems”, IEEE Transactions, Vol AC-11, pp. 613-614. Davenport A.G. (1967), “Gust loading factors”, J. Struct. Div., ASCE, 93(3). Gantmacher F:R. (1960), “The Theory of Matrices”, Vol. I y II, Chelsea Publishing Co. Goto H. y Toki K. (1969), “Structural Response to nonstationary random excitation”, World Conference on Earthquake Engrg., Santiago, Chile. Lawrence M. Jr. (1987), “Digital Spectral Analysis with applications”, Prentice Hall, ISBN 0-13-214149-3 025. Steven M.K. (1988), “Modern Spectral Estimation: Theory and Applications”, Prentice Hall, ISBN 0-13-598582-X. Yun C.B., Shinozuka M. (1990), “Program linearid for Identificaction of linear Structural dynamics systems”, Technical Report NCEER-90-0011, junio, National Center For Earthquake Engineering Research, State Univeryty of New York at Buffalo. Chen C.T., Desoer D.A. y Niederlinski A. (1966), “Simplified Conditions for Controllability and Observability of Linear Time Invariant Systems”, IEEE Transactions, Vol AC-11, pp. 613-614. Johansson R. (1992), “System Modeling and Identification”, Prentice Hall.

19
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
Shinozuca M., Yun C.B. y Imai H. (1978), “Identification of linear Structural Dynamic Systems”, Technical Report NSF-ENG-76-122257-2, Columbia University. Meseguer J., Sanz A., Perales J.M. y Pindado S. (2001), “Aerodinámica Civil, Cargas de viento en las edificaciones”, McGraw-Hill, Interamericana de España, ISBN 84-481-3332-3. Matsumoto M. y Prenninger (1989), “Consideration of higher vortex-exited modes in reliabily analices of bridge structures”, Journal of Wind Engineering and Industrial Aerodinamics, Vol. 32. Simiu E., y Scanlan R.H. (1996), “Wind Effects on Structures, Fundamentals and Applications to Design”, Third Edition, John Wiley and Sons; ISBN 0-471-12157-6.


1