Soluci on de problemas selectos: Mec anica vectorial:...
12
Soluci´ on de problemas selectos: Mec´ anica vectorial: Din´amica (Beer, 9th Edition) Ra´ ul Puente *1,2 1 Divisi´ on de Ciencias B´ asicas, Facultad de Ingenier´ ıa, UNAM 2 Departamento de f´ ısica te´ orica, Instituto de F´ ısica, UNAM 4 de noviembre de 2015 Problema 12.18 Si el sistema mostrado en la figura 1 inicia desde el reposo, encuentre la velocidad en t =1.2 s (a) del collar´ ın A, (b) del collar´ ın B. No tome en cuenta las masas de la polea y el efecto de la fricci´ on. Figura 1: Diagrama correspondiente al problema 12.18. Hay por lo menos dos maneras de resolver este pro- blema. La soluci´ on t´ ıpica es a trav´ es de una descripci´ on vectorial: Como la cuerda es la misma para todo el sistema, a partir de diagramas de cuerpo libre (ver figura 2) se obtienen las ecuaciones T - 2T = m A a A (1) F - 2T = m B a B (2) x m A T T T x m B F T T Figura 2: Diagramas de cuerpo libre para el problema 12.18 donde F = 25 N , m A = 10 kg y m B = 15 kg. N´ otese la exageraci´ on de las fuerzas en cada cuerpo para que se entienda mejor su efecto, ya que por hip´ otesis sabemos que el movimiento es unidimensional en cada caso. As´ ı, eliminando la tensi´ on T sumando las ecuaciones (1) y (2), se obtiene F = m B a B - 2m A a A (3) Adem´ as, si la cuerda tiene una longitud L y las posiciones de los collarines son x A (t)y x B (t) (medidas desde el extremo derecho del sistema), tenemos que x A + 2(x B - x A )= x A +2x B = L (4) = ⇒ v A +2v B =0 = ⇒ a A +2a B =0 ∴ a A = -2a B (5) Entonces, substituyendo la ecuaci´ on (5) en la ecuaci´ on (3), finalmente obtenemos que F = m B a B +4m A a B = ⇒ a B = F m B +4m A = ⇒ a A = - 2F m B +4m A (6) y como a = dv dt = ⇒ v = at, ∴ v A = - 2Ft m B +4m A = - 12 11 m s , v B = Ft m B +4m A = 6 11 m s * email: raulpuente@fisica.unam.mx 1
Transcript of Soluci on de problemas selectos: Mec anica vectorial:...
Solucion de problemas selectos:
Mecanica vectorial: Dinamica (Beer, 9th Edition)
Raul Puente*1,2
1Division de Ciencias Basicas, Facultad de Ingenierıa, UNAM2Departamento de fısica teorica, Instituto de Fısica, UNAM
4 de noviembre de 2015
Problema 12.18
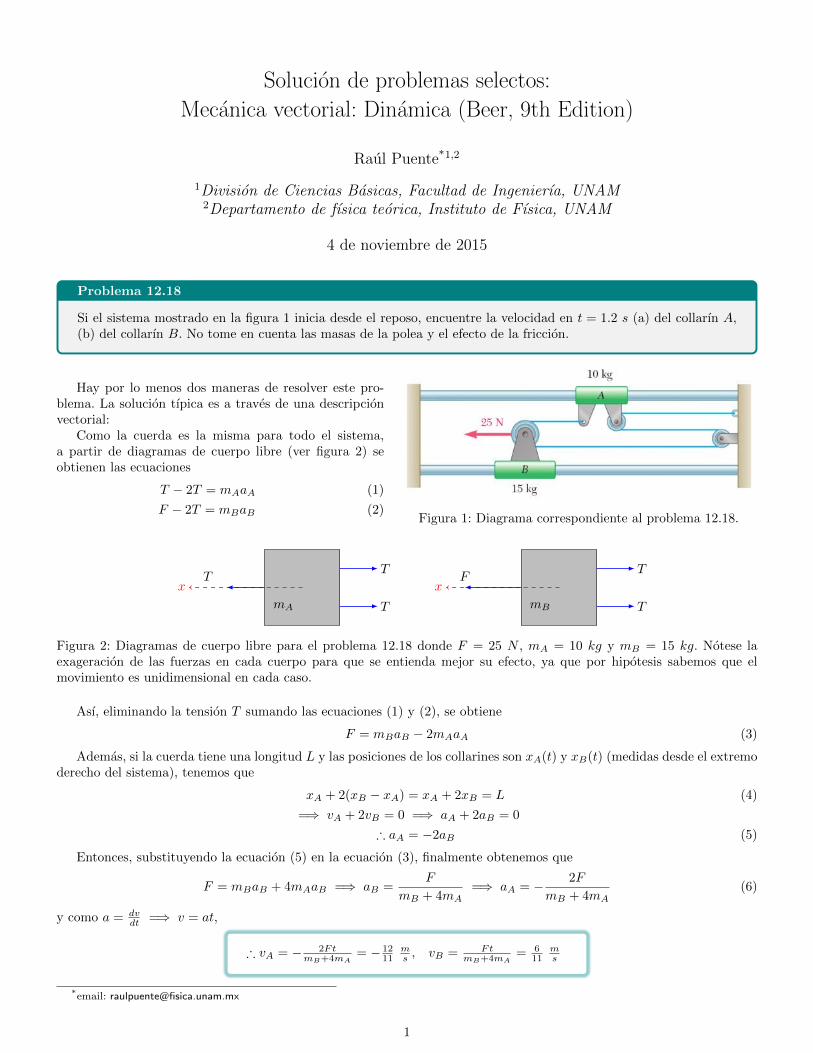
Si el sistema mostrado en la figura 1 inicia desde el reposo, encuentre la velocidad en t = 1.2 s (a) del colların A,(b) del colların B. No tome en cuenta las masas de la polea y el efecto de la friccion.
Figura 1: Diagrama correspondiente al problema 12.18.
Hay por lo menos dos maneras de resolver este pro-blema. La solucion tıpica es a traves de una descripcionvectorial:
Como la cuerda es la misma para todo el sistema,a partir de diagramas de cuerpo libre (ver figura 2) seobtienen las ecuaciones
T − 2T = mAaA (1)
F − 2T = mBaB (2)
x
mA
TT
T
x
mB
FT
T
Figura 2: Diagramas de cuerpo libre para el problema 12.18 donde F = 25 N , mA = 10 kg y mB = 15 kg. Notese laexageracion de las fuerzas en cada cuerpo para que se entienda mejor su efecto, ya que por hipotesis sabemos que elmovimiento es unidimensional en cada caso.
Ası, eliminando la tension T sumando las ecuaciones (1) y (2), se obtiene
F = mBaB − 2mAaA (3)
Ademas, si la cuerda tiene una longitud L y las posiciones de los collarines son xA(t) y xB(t) (medidas desde el extremoderecho del sistema), tenemos que
xA + 2(xB − xA) = xA + 2xB = L (4)
=⇒ vA + 2vB = 0 =⇒ aA + 2aB = 0
∴ aA = −2aB (5)
Entonces, substituyendo la ecuacion (5) en la ecuacion (3), finalmente obtenemos que
F = mBaB + 4mAaB =⇒ aB =F
mB + 4mA=⇒ aA = − 2F
mB + 4mA(6)
y como a = dvdt =⇒ v = at,
∴ vA = − 2FtmB+4mA
= − 1211
ms , vB = Ft
mB+4mA= 6
11ms
*email: [email protected]
1

La otra manera es un poco mas sencilla, utilizando una descripcion Lagrangiana.Vemos que para describir el sistema se necesitan 2 grados de libertad, xA(t) y xB(t). Sin embargo, debido a que hay
una constriccion (c.f. ecuacion (4)), solo es necesario 1 grado de libertad para describirlo, por ejemplo la posicion xB(t).Recordemos que la funcion Lagrangiana de un sistema conservativo es L = T − V , donde T es la energıa cinetica total
y V es el potencial. Por tanto, vemos que para este sistema
T =1
2mAx
2A +
1
2mBx
2B V = −
∫ 0
xA
Fdx′A +
∫ xB
0
Fdx′B = F (xA + xB)
donde el potencial es tal que F = −∇V = 25 N . Por tanto, escribiendo la Lagrangiana en terminos de xB , tenemos que
L = (1
2mB + 2mA)x2B − F (L− xB)
Asimismo, recordemos que las ecuaciones de Euler-Lagrange que describen al sistema son
d
dt
(∂L∂xB
)=
∂L∂xB
=⇒ (mB + 4mA)xB = F (7)
Luego, haciendo lo mismo pero ahora en terminos de xA, obtenemos
(mB + 4mA)xA = −2F (8)
y vemos que las ecuaciones (7) y (8) son exactamente las mismas que las aceleraciones dadas por la ecuacion (6). Noteseque la descripcion Lagrangiana ofrece, en muchos casos, el encontrar la solucion a problemas conservativos de una maneramucho mas directa que a partir de una descripcion vectorial, debido principalmente a que se evade el pasar por las fuerzasde constriccion (en este caso la tension de la cuerda T ).
2
Problema 12.22
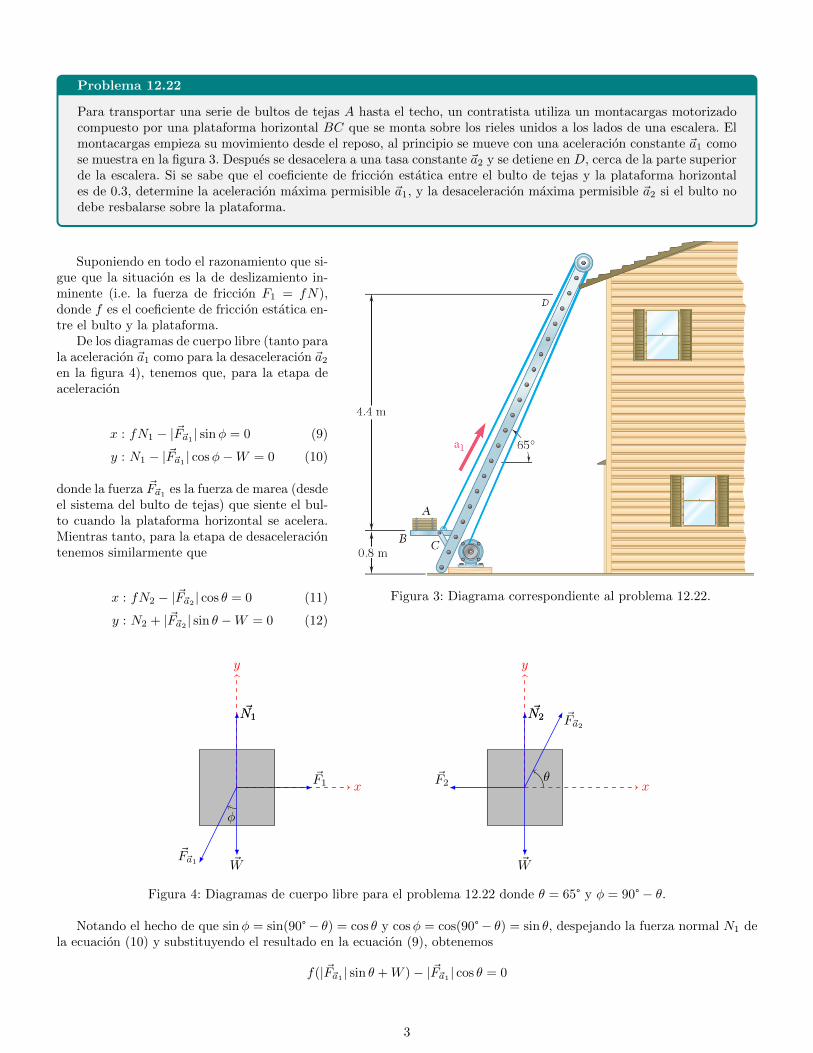
Para transportar una serie de bultos de tejas A hasta el techo, un contratista utiliza un montacargas motorizadocompuesto por una plataforma horizontal BC que se monta sobre los rieles unidos a los lados de una escalera. Elmontacargas empieza su movimiento desde el reposo, al principio se mueve con una aceleracion constante ~a1 comose muestra en la figura 3. Despues se desacelera a una tasa constante ~a2 y se detiene en D, cerca de la parte superiorde la escalera. Si se sabe que el coeficiente de friccion estatica entre el bulto de tejas y la plataforma horizontales de 0.3, determine la aceleracion maxima permisible ~a1, y la desaceleracion maxima permisible ~a2 si el bulto nodebe resbalarse sobre la plataforma.
Figura 3: Diagrama correspondiente al problema 12.22.
Suponiendo en todo el razonamiento que si-gue que la situacion es la de deslizamiento in-minente (i.e. la fuerza de friccion F1 = fN),donde f es el coeficiente de friccion estatica en-tre el bulto y la plataforma.
De los diagramas de cuerpo libre (tanto parala aceleracion ~a1 como para la desaceleracion ~a2en la figura 4), tenemos que, para la etapa deaceleracion
x : fN1 − |~F~a1 | sinφ = 0 (9)
y : N1 − |~F~a1 | cosφ−W = 0 (10)
donde la fuerza ~F~a1 es la fuerza de marea (desdeel sistema del bulto de tejas) que siente el bul-to cuando la plataforma horizontal se acelera.Mientras tanto, para la etapa de desaceleraciontenemos similarmente que
x : fN2 − |~F~a2 | cos θ = 0 (11)
y : N2 + |~F~a2 | sin θ −W = 0 (12)
x
y
~N1
~F~a1
φ
~N1
~W
~F1 x
y
~N2 ~F~a2
θ
~N2
~W
~F2
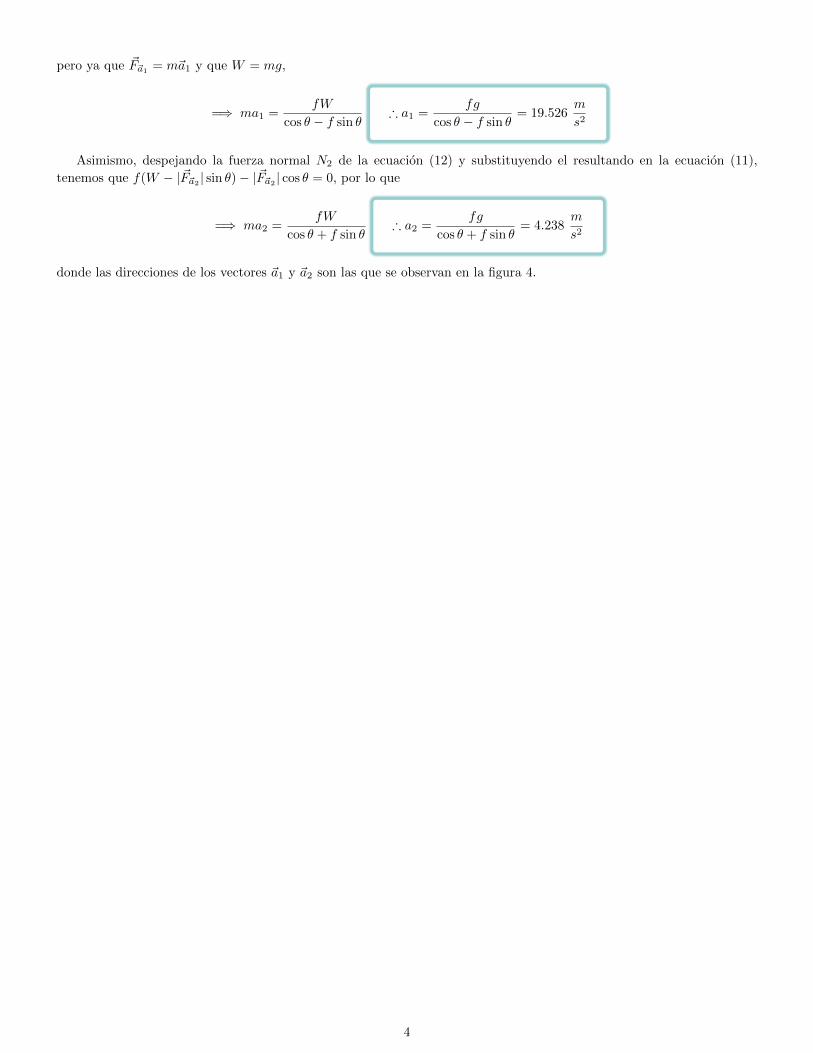
Figura 4: Diagramas de cuerpo libre para el problema 12.22 donde θ = 65° y φ = 90°− θ.
Notando el hecho de que sinφ = sin(90°− θ) = cos θ y cosφ = cos(90°− θ) = sin θ, despejando la fuerza normal N1 dela ecuacion (10) y substituyendo el resultado en la ecuacion (9), obtenemos
f(|~F~a1 | sin θ +W )− |~F~a1 | cos θ = 0
3
pero ya que ~F~a1 = m~a1 y que W = mg,
=⇒ ma1 =fW
cos θ − f sin θ∴ a1 =
fg
cos θ − f sin θ= 19.526
m
s2
Asimismo, despejando la fuerza normal N2 de la ecuacion (12) y substituyendo el resultando en la ecuacion (11),
tenemos que f(W − |~F~a2 | sin θ)− |~F~a2 | cos θ = 0, por lo que
=⇒ ma2 =fW
cos θ + f sin θ∴ a2 =
fg
cos θ + f sin θ= 4.238
m
s2
donde las direcciones de los vectores ~a1 y ~a2 son las que se observan en la figura 4.
4

Problema 12.41
Una esfera D de 100 g se encuentra en reposo respecto al tambor ABC que gira a una razon constante, comose muestra en la figura 5. Sin tomar en cuenta la friccion, determine el intervalo de los valores permisibles de lavelocidad v de la esfera, si ninguna de las fuerzas normales ejercidas por la esfera sobre las superficies inclinadasdel tambor debe exceder 1.1 N .
Figura 5: Diagrama correspondiente alproblema 12.41, en donde definimosθ1 = 30° y θ2 = 70°.
Del enunciado, vemos que la situacion retratada en la figura 5 se puede tra-ducir en el diagrama de cuerpo libre de la figura 6. De aquı, podemos describirla condicion de equilibrio mediante las ecuaciones para las componentes de lasfuerzas en el sistema de referencia de la esfera como
x : ~Fc · r − | ~N1| sin θ1 − | ~N2| sin θ2 = 0 (13)
y : | ~N1| cos θ1 + | ~N2| cos θ2 −W = 0 (14)
donde ~Fc = m v2
r r es la fuerza centrıfuga que siente la esfera cuando el tamborgira, donde v es la velocidad con la que gira la esfera y el vector unitario r esel vector que apunta desde el eje de rotacion del tambor (en este caso y parael sistema impuesto en el diagrama de cuerpo libre, el vector r coincide con elvector x).Luego, de las ecuaciones (13) y (14), obtenemos
v =
√r
m
(| ~N1| sin θ1 + | ~N2| sin θ2
)(15)
mg = | ~N1| cos θ1 + | ~N2| cos θ2 (16)
con lo que hemos logrado expresar la velocidad de la esfera en terminos de las magnitudes de las fuerzas normales en laecuacion (15) y la dependencia mutua de estas en la ecuacion (16).
x
y
~Fc
~W
~N2
~N1
θ2
θ1
Figura 6: Diagrama de cuerpo librepara la situacion de equilibrio desdeel sistema de la esfera del problema12.41.
Por tanto, podemos escribir la velocidad v de la esfera conocida la magnitud deuna fuerza normal o la otra, como
v =
√
rm
[| ~N1| sin θ1 + tan θ2(mg − | ~N1| cos θ1)
]si | ~N1| es conocida√
rm
[tan θ1(mg − | ~N2| cos θ2) + | ~N2| sin θ2
]si | ~N2| es conocida
(17)
si hacemos que | ~N1| = 1.1 N , obtenemos que v = 1.121 m/s, mientras que si
| ~N2| = 1.1 N , obtenemos que v = 1.663 m/s, por lo tanto
1.121m
s≤ v ≤ 1.663
m
s
5

Problema 13.61
Un colların de 500 g se puede deslizar sin friccion sobre la varilla curva BC en un plano horizontal, como se muestraen la figura 7. Si la longitud no deformada del resorte es de 80 mm y k = 400 kN/m, determine (a) la velocidadque se le debe imprimir al colların en el punto A para llegar a B con velocidad nula, (b) la velocidad del collarıncuando llegue al punto C. No tome en cuenta las masas de la polea y el efecto de la friccion.
Figura 7: Diagrama correspondienteal problema 13.61.
(a)
Utilizando la conservacion de energıa en los puntos A y B, si definimos `0 comola longitud no deformada del resorte, tenemos
1
2k(`A − `0)2 +
1
2mv2A =
1
2k(`B − `0)2
=⇒ vA =
√k
m
[(`B − `0)
2 − (`A − `0)2]u 87.178
m
s
(b)
Luego, hacemos lo mismo pero ahora para el punto C, tomando como referenciala energıa del punto B del inciso (a), i.e.
1
2k(`B − `0)2 =
1
2k(`C − `0)2 +
1
2mv2C
=⇒ vC =
√k
m
[(`B − `0)
2 − (`C − `0)2]u 105.83
m
s
6

Problema 13.162
Los paquetes de una fabrica de refacciones para automoviles se transportan hacia el muelle de descarga empujando-los a lo largo de una pista de rodillos con muy poca friccion como se muestra en la figura 8. En el instante que seindica en la figura, los paquetes B y C se encuentran en reposo y el paquete A tiene una velocidad de 2 m/s. Si sesabe que el coeficiente de restitucion entre los paquetes es de 0.3, determine (a) la velocidad del paquete C despuesde que A golpea a B y B golpea a C, (b) la velocidad de A despues de que este golpea a B por segunda vez.
Figura 8: Diagrama correspondiente al problema 13.162.
(a)
Si definimos variables primadas para despues de la primera co-lision (la colision entre los paquetes A y B), doblemente prima-das para las variables despues de la segunda colision (la colisionentre los paquetes B y C), a partir de la conservacion del mo-mento lineal (tomando en cuenta los coeficientes de restitucionde los paquetes), podemos escribir
mAvA = mAv′A +mBv
′B (18)
evA = v′B − v′A (19)
con lo que, multiplicando la ecuacion (19) por mA y sumando el resultado a la ecuacion (18)
=⇒
v′A = mA−emB
mA+mBvA
v′B = (1+e)mAmA+mB
vA
(20)
Luego, hacemos lo mismo para la segunda colision (entre los paquetes B y C), para obtener
mBv′B = mBv
′′B +mCv
′C
ev′B = v′C − v′′B
=⇒
v′′B = mB−emC
mB+mCv′B
v′C = (1+e)mBmB+mC
v′B
(21)
∴ v′C =(1 + e)2mAmB
(mA +mB)(mB +mC)vA u 0.901
m
s
(b)
Ahora, como en el inciso anterior, si definimos variables triplemente veces primadas para las variables despues de que elpaquete A golpea al paquete B por segunda vez, podemos escribir la relacion entre las velocidades v′A y v′′B (despues delprimer y segundo impacto, respectivamente) con las velocidades v′′′A y v′′′B , i.e.
mAv′A +mBv
′′B = mAv
′′A +mBv
′′′B (22)
e(v′′B − v′A) = v′′A − v′′′B (23)
y, de la misma forma que en el inciso anterior, podemos resolver para la velocidad buscada v′′′A , a saber
v′′A =(1 + e)mB
mA +mBv′′B +
mA − emB
mA +mBv′A (24)
por lo que, usando las ecuaciones (20) y (21), finalmente obtenemos
∴ v′′A =
[(1 + e)2(mB − emC)mAmB
(mA +mB)2(mB +mC)+
(mA − emB
mA +mB
)2]vA u 0.807
m
s
7
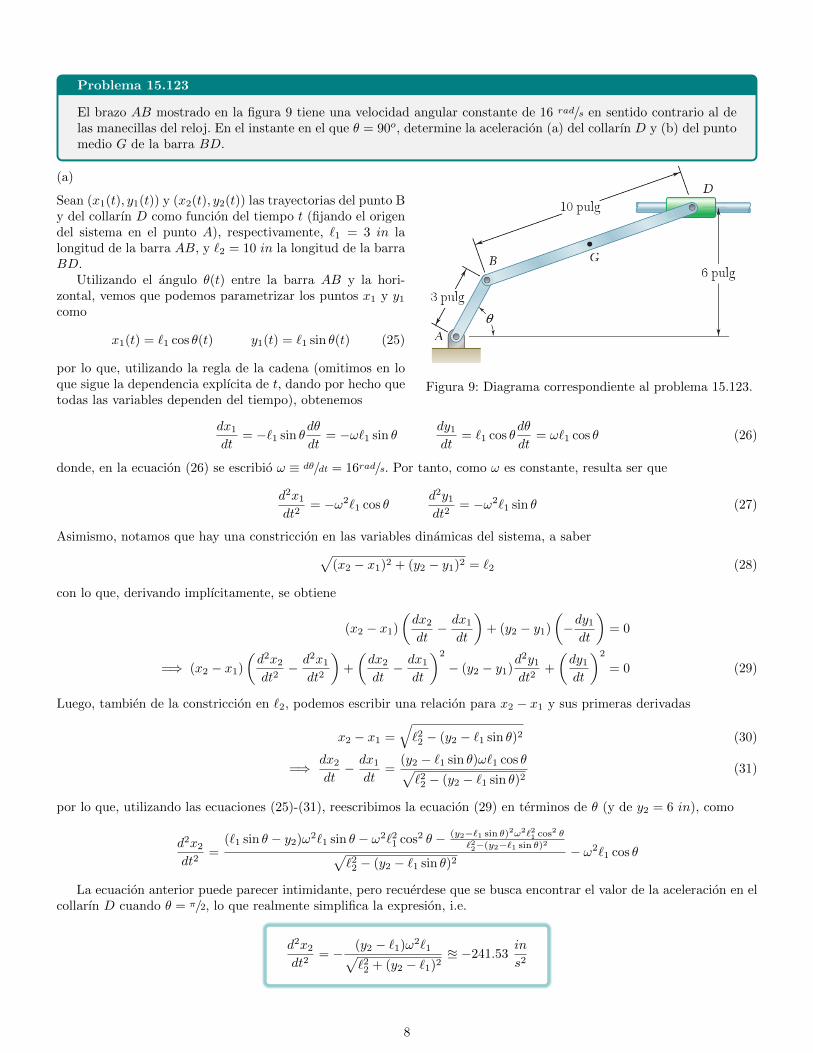
Problema 15.123
El brazo AB mostrado en la figura 9 tiene una velocidad angular constante de 16 rad/s en sentido contrario al delas manecillas del reloj. En el instante en el que θ = 90o, determine la aceleracion (a) del colların D y (b) del puntomedio G de la barra BD.
Figura 9: Diagrama correspondiente al problema 15.123.
(a)
Sean (x1(t), y1(t)) y (x2(t), y2(t)) las trayectorias del punto By del colların D como funcion del tiempo t (fijando el origendel sistema en el punto A), respectivamente, `1 = 3 in lalongitud de la barra AB, y `2 = 10 in la longitud de la barraBD.
Utilizando el angulo θ(t) entre la barra AB y la hori-zontal, vemos que podemos parametrizar los puntos x1 y y1como
x1(t) = `1 cos θ(t) y1(t) = `1 sin θ(t) (25)
por lo que, utilizando la regla de la cadena (omitimos en loque sigue la dependencia explıcita de t, dando por hecho quetodas las variables dependen del tiempo), obtenemos
dx1dt
= −`1 sin θdθ
dt= −ω`1 sin θ
dy1dt
= `1 cos θdθ
dt= ω`1 cos θ (26)
donde, en la ecuacion (26) se escribio ω ≡ dθ/dt = 16rad/s. Por tanto, como ω es constante, resulta ser que
d2x1dt2
= −ω2`1 cos θd2y1dt2
= −ω2`1 sin θ (27)
Asimismo, notamos que hay una constriccion en las variables dinamicas del sistema, a saber√(x2 − x1)2 + (y2 − y1)2 = `2 (28)
con lo que, derivando implıcitamente, se obtiene
(x2 − x1)
(dx2dt− dx1
dt
)+ (y2 − y1)
(−dy1dt
)= 0
=⇒ (x2 − x1)
(d2x2dt2
− d2x1dt2
)+
(dx2dt− dx1
dt
)2
− (y2 − y1)d2y1dt2
+
(dy1dt
)2
= 0 (29)
Luego, tambien de la constriccion en `2, podemos escribir una relacion para x2 − x1 y sus primeras derivadas
x2 − x1 =√`22 − (y2 − `1 sin θ)2 (30)
=⇒ dx2dt− dx1
dt=
(y2 − `1 sin θ)ω`1 cos θ√`22 − (y2 − `1 sin θ)2
(31)
por lo que, utilizando las ecuaciones (25)-(31), reescribimos la ecuacion (29) en terminos de θ (y de y2 = 6 in), como
d2x2dt2
=(`1 sin θ − y2)ω2`1 sin θ − ω2`21 cos2 θ − (y2−`1 sin θ)2ω2`21 cos2 θ
`22−(y2−`1 sin θ)2√`22 − (y2 − `1 sin θ)2
− ω2`1 cos θ
La ecuacion anterior puede parecer intimidante, pero recuerdese que se busca encontrar el valor de la aceleracion en elcolların D cuando θ = π/2, lo que realmente simplifica la expresion, i.e.
d2x2dt2
= − (y2 − `1)ω2`1√`22 + (y2 − `1)2
u −241.53in
s2
8

x
y
θ
~r1
~r1+~r22 ~r2
~aG~a1
~a2
B
D
Figura 10: Vectores de posicion y aceleracionesen los extremos y el centro G de la barra BD.
(b)
En la figura 10 se aprecia que el vector de la posicion del punto mediode la barra BD para cualquier tiempo t esta dado por
~r3(t) =~r1(t) + ~r2(t)
2=
1
2(x1 + x2, y1 + y2)
=⇒ ~vG =d~r3dt
=
(dx1dt
+dx2dt
,dy1dt
+dy2dt
)(32)
=⇒ ~aG =d2~r3dt2
=
(d2x1dt2
+d2x2dt2
,d2y1dt2
+d2y2dt2
)(33)
por lo que, usando los resultados del inciso (a), para el angulo θ = π/2obtenemos que
~aG
∣∣∣θ=π
2
=~a1 + ~a2
2
∣∣∣∣θ=π
2
(34)
Luego, sabemos que la derivada del vector unitario r1 apunta en ladireccion del vector θ, i.e.
~v1 = |~v1|θ (35)
=⇒ ~a1 =d~v1dt∼ r1 (36)
i.e. el vector ~a1 apunta en la direccion del vector −r1 (c.f. figura 10), mientras que el vector ~a2 siempre apunta en ladireccion −x. Por tanto, cuando θ = π/2
~aG · x =~a22
~aG · y =~a12
i.e.
~aG = − (y2 − `1)ω2`1√`22 + (y2 − `1)2
x− ω2`1 y u (−120.76x− 384y)in
s2
9

Problema 16.9
El camion montacargas que se muestra en la figura 11 pesa 2250 lb y se usa para levantar una caja de pesoW = 2500 lb. Si se sabe que el camion esta en reposo, determine (a) la aceleracion de la caja hacia arriba parala cual las reacciones en las ruedas traseras B son cero, (b) lareaccion correspondiente en cada una de las ruedasdelanteras A.
Figura 11: Diagrama correspondiente al problema 16.9.
(a)
Vemos que, para la condicion de que las reacciones en lasruedas traseras B sean cero (utilizando la regla de la manoderecha), tenemos que el equilibrio de torcas alrededor delpunto A implica que
~r × ~W ′ + ~rG × ~WG = 0
=⇒ rW ′ − rGWG = 0
donde r = 3 ft, rG = 4 ft, WG = 2250 lb y W ′ = W+ma esel peso aparente de la caja de masa m = W/g al levantarlacon una aceleracion a, i.e.
a =rGWG − rW
rWg = 6.44
ft
s2
donde la aceleracion de la gravedad g se tomo como de 32.2 ft/s2.
(b)
Luego, cuando las ruedas B del camion estan a punto de despegarse del piso, el centro de masa del sistema total se situajusto en l vertical sobre el punto A, por lo que el peso total del sistema se aplica a este punto (i.e. el peso del camion WG
mas el peso aparente de la caja W ′ = W +ma), por lo que, si la normal en cada rueda debida al piso es ~N , se tiene
WT = WG +W ′ = WG + (1 +a
g)W = 5250 lb
∴ N =WT
2= 2625 lb
10

Problema 16.31
El tambor de freno, de 8 in de radio, esta unido a un volante mas grande que no se muestra en la figura 12. Elmomento de inercia de la masa total del tambor y del volante es de 14 lb · ft · s2 y el coeficiente de frccion cineticaentre el tambor y la zapata del freno es de 0.35. Si la velocidad angular del volante es de 360 rpm en el sentido delas manecillas del reloj cuando se aplica una fuerza ~P de 75 lb de magnitud al pedal C, determine el numero derevoluciones realizadas por el volante antes de detenerse.
Figura 12: Diagrama correspondienteal problema 16.31
Empezamos notado que, al aplicar la fuerza ~P sobre el freno, se llega a unequilibrio en las torcas con respecto al punto A, utilizando la regla de la manoderecha y tomando en cuenta el sentido del giro del tambor∑
~τA = ~0
=⇒ −~rN × ~N − ~rf × ~F + ~rP × ~P = ~0 (37)
donde ~N es la fuerza normal debida al tambor y ~F es la fuerza de friccion debidaal roce del tambor con la zapata. Notando que cada angulo que forma cada fuerzacon su respectivo brazo de palanca (c.f. figura 13), reescribimos la ecuacion (37)como
−rNN − rFF + rPP = 0
pero, recordando que la magnitud de la fuerza de friccion es F = fN , donde fes el coeficiente de friccion cinetica, resolvemos para la magnitud de la friccion yobtenemos
F =frP
rN + frFP (38)
~P
~N
~F
9 in
10 in
2 in
A
Figura 13: Vectores de posicion yaceleraciones en los extremos y elcentro G de la barra BD.
Ahora, en el sistema del tambor, tomando en cuenta las torcas que se ejercendebido a la friccion y a la normal (con respecto al centro D y usando nuevamentela regla de la mano derecha), podemos escribir∑
~τD = I~α =⇒ ~rD × ~F = I~α
donde I es el momento de inercia del tambor y el volante, ~α es su aceleracionangular y rD es el radio del disco. Notese que la torca debida a la normal se anulaya que la normal es colineal con su brazo de palanca. Ası, obtenemos la ecuaciondiferencial de la dinamica del tambor-volante
α =dω(θ)
dt= −rDF
I< 0 i.e. el sistema se desacelera (39)
donde se ha supuesto que, tanto α como ω son funciones del angulo θ. Por tanto,utilizando la regla de la cadena α = ω dωdθ , por lo que∫ 0
ω0
ωdω = α
∫ θ
0
dθ′ =⇒ θα =ω2
2
∣∣∣∣0ω0
=⇒ θ =ω20
2|α|(40)
donde se integra desde la velocidad angular del tambor-volante justo antes de que se aplique el freno ω0 hasta que este sedetiene, tomando en cuenta que, segun la ecuacion (39), la aceleracion angular es constante. Ası, tomando en cuenta queω0 = 360 rpm = 120π rads y usando la ecuacion (38), la ecuacion (40) implica finalmente que
θ =Iω2
0
2rDF=Iω2
0(rN + frF )
2frDrPP=
1712
25π2 rad =
856
25π rev
11
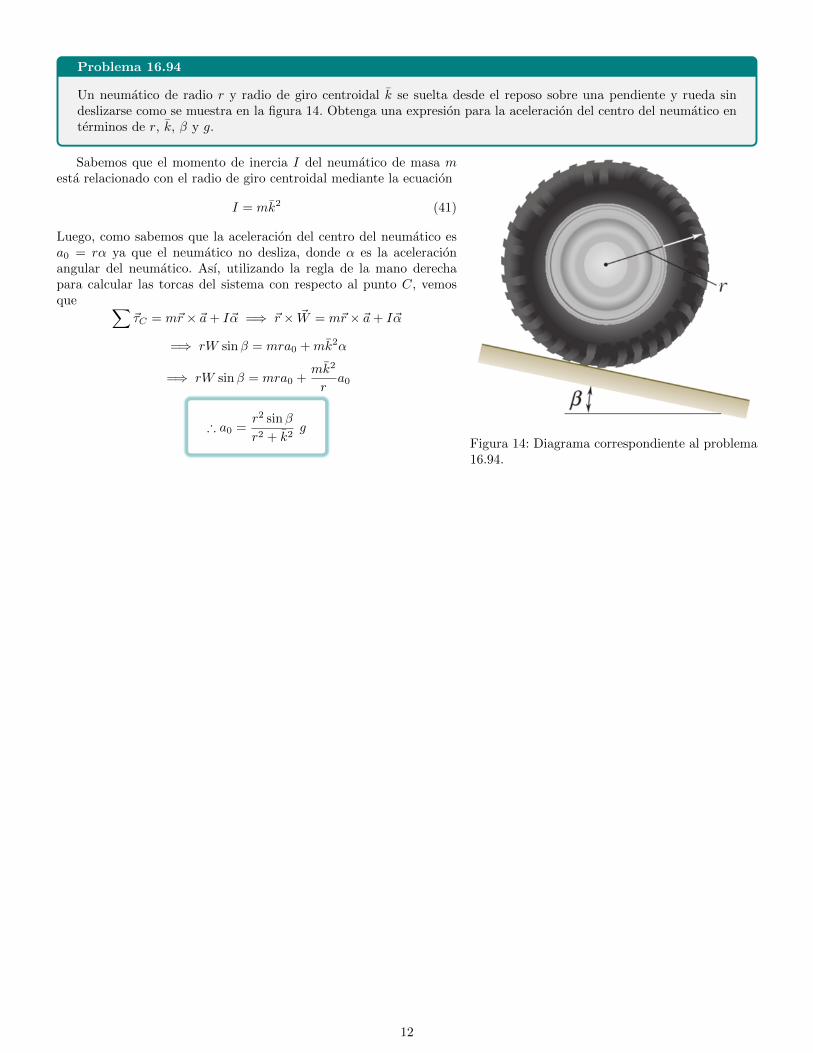
Problema 16.94
Un neumatico de radio r y radio de giro centroidal k se suelta desde el reposo sobre una pendiente y rueda sindeslizarse como se muestra en la figura 14. Obtenga una expresion para la aceleracion del centro del neumatico enterminos de r, k, β y g.
Figura 14: Diagrama correspondiente al problema16.94.
Sabemos que el momento de inercia I del neumatico de masa mesta relacionado con el radio de giro centroidal mediante la ecuacion
I = mk2 (41)
Luego, como sabemos que la aceleracion del centro del neumatico esa0 = rα ya que el neumatico no desliza, donde α es la aceleracionangular del neumatico. Ası, utilizando la regla de la mano derechapara calcular las torcas del sistema con respecto al punto C, vemosque ∑
~τC = m~r × ~a+ I~α =⇒ ~r × ~W = m~r × ~a+ I~α
=⇒ rW sinβ = mra0 +mk2α
=⇒ rW sinβ = mra0 +mk2
ra0
∴ a0 =r2 sinβ
r2 + k2g
12