Speed GCS Manual Espáñol.pdf
135
-
Upload
carlos-martinez -
Category
Documents
-
view
627 -
download
64
Transcript of Speed GCS Manual Espáñol.pdf

2
CENTRILIFTUNA DIVISION DE BAKER HUGHES
MARCA REGISTRADA 2001-08-28
NUEVA VERSION 4.14ENERO 2001
Las pantallas y los ejemplos contenidos en este manual requieren que elsistema de Electrospeed de GCS contengan el listado de versiones de lamarca. Por favor contacte Centrilift para la actualización de las versiones deser necesario:
Estas son las revisiones del sistema:Unidad de Display Gráfica: 3.16 o mayorUnidad de Control del Sistema : 5.80 o mayorConversión de Potencia: 3.06 o mayor
PREPARADO POR REVISADO POR: APROBADO POR: REVISION FECHA
JULIAN ANDRES MARTIN ADALBERTO CASTRO A OCT/2001

3
TABLA DE CONTENIDO
INTRODUCCION 6DESCRIPCION GENERAL 6CARACTERISTICAS/FUNCIONES BENEFICIOS 7SEGURIDAD E INSTALACION 8RECOMENDACIONES DE SEGURIDAD 8TRANSPORTE Y ALMACENAMIENTO 8CHEQUEOS INICIALES 8INSTALACION DEL CONTROLADOR 8INSTALACION ELECTRICA 9INSTALACION DEL SISTEMA DE 12/18 PULSOS 10INTERFACE DEL CABLEADO DE CLIENTE 10ENTRADAS DIGITALES 10SALIDAS DIGITALES 11ENTRADAS ANALOGAS 11FUNDAMENTOS DE GCS 12DISPLAY GRAFICO 12MOSTRAR UN MENU, LEEDS Y CONFIGURAR 13CONVENCIONES MOSTRADAS EN EL GCS 14EDICION DE UNA LECTURA O CONFIGURACION 14OPERACIÓN BASICA 16UNIDAD DE SWITCHES DE START / STOP 16SELECCIÓN MODO MANUAL / AUTOMATICO 16PANEL DE SWITCHES MONTADOS EXTERNAMENTE HAND/OFF/AUTO Y START 16PARAMETRO DE REARRAANQUE AUXILIARES 17LEDS VERDE, AMARILLO Y ROJO 17CONECCION A RED EXTERNA, LUCES DE PANEL AMBER Y GREEN 18DISPLAY DE LUCES EN EL PANEL 18INDICACION DE UNA ALARMA Y SHUTDOWN 18CONDICION DE LOCKOUT 18SISTEMA DE SEGURIDAD 19SISTEMA DE RELOJ 20AJUSTE DE CONTRASTE 20REVICION DEL SOFTWARE 20LOS MENUS GCS 22REVICION DE LA ESTRUCTURA DEL MENU DEL ELECTROSPEED GCS 22PANTALLA DE CONDICION 23CONFIGURACION ESPEED GCS 24MENU DE CONFIGURACION 1 (GCS SETUP 1) 24MENU DE CONFIGURACION 2 (GCS SETUP 2 ) 27ARRANQUE (STARTS) 31HISTORIA Y REGISTRO DE DATOS 34HISTORIAL DE SHUTDOWN 34DETALLES DE LOS SHUTDOWN 34HISTORIAL DE CORRIDAS 35GUARDAR LOS DATOS A LA PC CARD 38GRAFICAR 39CARTA AMPERIMETRICA Ø B 40FALLAS Y UNDERLOAD 42OVERLOAD 42

4
UNDERLOAD 44ENTRADA DE SOBREVOLTAJE (INPUT OVRVLT) 46ENTRADA DE BAJO VOLTAJE (INPUT UNDVLT) 47ENTRADA DE VOLTAJE DESBALNCEADO (INPUT VUNBAL) 49BAJA VELOCIDAD (LOW SPEED TRIP) 50SENSORES DE TEMPERATURA (TEMP SENSORS) 51DIFUSOR DE CALOR 1 (HEATSINK 1) 51DIFUSOR DE CALOR 2 (HEATSINK 2) 52DIFUSOR DE CALOR 2 (HEATSINK 3) 53DIFUSOR DE CALOR 4 (HEATSINK 4) 53INDUCTOR DE TEMPERATURA 53TEMPERATURA AMBIENTE 54TEMPERATURA AUXILIAR (AUXILIARY TEMP) 54FALLA DE TEMPERATURA (TELEMETRY FAIL) 54CONFIGURACION DE LA ALARMA (ALARM SETUP) 56FUNCIONES DEL CONTROLADOR LOGICO 58CONFIGURACION DEL PLC (PROG FUNCT SETUP) 58CONTROL DE SALIDA DE FRECUENCIA 58BLOQUES DEL PLC 63EDICION DE BLOQUE DEL PLC 63PUNTO DE EDICION DEL USUARIO (EDIT USER POINT) 64PANTALLA PARA EL USUARIO (CUSTOM USER SCREEN) 67SCADA & SECURITY & SYSTEM 67SISTEMA 68CONFIGURACION DEL RCB 69CONFIGURACION SCADA 70REGISTRO DE COMUNICACIÓN SCADA 72SEGURIDAD 72TIEMPO ACTUAL 73CONFIGURACION DEL TIEMPO 73CONFIGURACION ANALOGA (ANALOG SETUP & DISPLAY) 75CONFIGURACION ANALOGA 75MODULOS GCS 76TARJETA DE ENTRADAS ADICIONALES I/O 76ENTRADA INTERNA ANALOGA 1 76CONFIGURACIÓN DE ALTO UMBRAL EN LA ENTRADA ANALOGA 1 78CONFIGURACIÓN DE BAJO UMBRAL EN LA ENTRADA ANALOGA 1 79ENTRADA INTERNA ANALOGA 2 79ENTRADA INTERNA DIGITAL 1 80ENTRADA INTERNA DIGITAL 2 81ENTRADA INTERNA DIGITAL 3 82MODULOS DE EXPANSION I/O 1 82MODULOS DE EXPANSION I/O 2 82MODULOS DE EXPANSION I/O 3 82TRACKER 82CONDICION DE LOS MODULOS 83OPCIONES Y EXPANCIONES 84MANTENIMIENTO 85RESOLUCION DE PROBLEMAS 85ANEXO A : ESPECIFICACIONES 86ANEXO B: HOJA DE TRABAJO 87

5
ANEXO C: MONITORES DE INSTALACION/SERVICIO 88ANEXO D: TAMAÑO DE CABLE 89ANEXO E: VALORES PARA VCS TORQUE VARIABLE 90ANEXO F: CONFIGURAION BASICA 91FORMING CAPACITORS 92ANEXO G: START UP 85NO LOAD SETUP 85START-UP 85ANEXO H: PESOS Y DIMENSIONES 86ANEXO I: MODBUS PROTOCOL SUPPORT 102ANEXO J: USER PROGRAMMABLE LOGIC 116ANEXO K: USE OF THE PCMCIA CARD 125
6
INTRODUCCION
Este manual contiene información general sobre el sistema operativo del SISTEMA DE CONTROLGRÁFICO (GRAPHIC CONTROL SYSTEM GCS) e información sobre la instalación, instruccionesde configuración y operación para el Electrospeed GCS controlador velocidad variable.
DESCRIPCION GENERAL
El Electrospeed GCS está clasificado como un inversor de voltaje variable (variable voltageinverter VVI). Este usa 6 pulsos de un rectificador controlado de silicio (SCR) para convertir voltajeAC a voltaje DC variable. Maneja con grandes pulsaciones convertidores (identificados comomanejadores de pulso 12 o 18) que pueden ser configurados donde la reducción de armónicos esnecesaria. Un inductor y capacitor en serie a través de la línea DC son usados para filtrar rizos deAC. El inversor usa 6 compuertas de potencia de transistores bipolares (IGBT) para conformar unvoltaje de salida de tres fases cuasi-sinusoidal usando el algoritmo inversor Centrilift’sSelectWaveTM. Este moderno controlador de frecuencia variable de AC esta diseñado para todoslos requerimientos de instalación, necesitando una fuente de frecuencia variable. Este operadirectamente con VAC trifásico de 380 a 480 VAC a 50/60 Hertz.El uso de la ultima tecnología en microprocesadores permite la fácil configuración, operación ydiagnostico. Los microcontroladores también reducen el numero de tarjetas requeridas mejorandoasí la fiabilidad y versatilidad del controlador. La interface de operación gráfica hace fácil laoperación y la programación de aplicaciones especiales.El GCS es programable para muchos tipos de cargas, como torque variable, torque constante, yvoltaje constante con un extenso rango de velocidad. El sistema de control del GCS tambiénproporciona una interface de telemetría de alta velocidad (CITIBusTM) que simplifica la expansióndel sistema de control y la personalización.El Electrospeed GCS está disponible en dos tipos de gabinetes; a prueba de agua (NEMA 3, IP54)y para propósitos generales (NEMA1, IP33). La unidad a prueba de agua usa un sistema deenfriamiento patentado que elimina problemas de ineficiencia y de fiabilidad asociados con el calor.Cada uno de los dos tipos es ofrecido en 4 tamaños que corresponden a las series “1000”, “2000”,“4000”, y “8000”.
El controlador Electrospeed GCS puede comunicarse con sistemas SCADA o de telemetríausando el protocolo Modbus RTU y construyendo interfaces de hardware basadas en RS-232.Módulos de expansión de entrada/salida pueden ser agregados al sistema para dar un solo puntode control y monitoreo para un amplio rango de sensores.
7
CARACTERISTICAS/ BENEFICIOSFUNCIONES
Conectividad y telemetría Permite trabajo en red u operación remota
Configuración descargable Facilidad de múltiple configuración del controlador
Sistema de control expandible: Flexibilidad en diseño de sistemas y delegacionesMódulos I/O, analizador de armónicos
Interface de operación del GCS idéntica Personal de mantenimiento y operación necesitapara todos los productos GCS aprender la interface solo una vez
Tecnología de superficial para el montaje Tarjetas más pequeñas, con pocas conexiones queDe componentes electrónicos dan a una fiabilidad mayor
Software actualizable en campo El controlador no necesita ser removido de sulocalización para modificar o actualizar su software
Salida de registro de datos en hojas de Permite monitorear y analizar datos usando unDatos de archivos compatibles PC como herramientas de software
Carta amperimétrica. Permite grabación de las corrientes del motor sinpapel.
Backup continuo de datos y parámetros Reduce la posibilidad de perdida de datos debidaDe operación a fallas.
Fecha / hora de eventos e historia de paradas Ayuda a identificar problemas.
Ventana de diagnostico / alarma aparece Muestra automáticamente los problemasAutomáticamente
Programación de I/O I/O pueden ser programadas para que funcionenindependientemente de la operación delcontrolador, similar a un PLC independiente
Compatible con la línea de productos GCS Interfaz y configuración con otros productosCentrilift se hace más fácil.
Armarios cumplen con estándares Operación fiable en cualquier ambienteindustriales NEMA 3, IP54, NEMA1, IP33

8
Seguridad e instalaciónRECOMENDACIONES DE SEGURIDAD
El controlador debe ser instalado, ajustado y puesto en servicio por personal de mantenimientoeléctrico calificado. Una instalación u operación impropia del controlador puede causar accidenteso daños al personal o al equipo. El controlador tiene que ser instalado y aterrizado de acuerdo conlos códigos eléctricos locales y nacionales. Existen voltajes potencialmente letales dentro delgabinete. Se debe tener extremo cuidado y asegurarse de tener todas las fuentes de potenciadesconectadas al comenzar la instalación, mantenimiento y/o trabajos de reparación.
TRANSPORTE Y ALMACENAMIENTO
El controlador Electrospeed debe ser llevado con una velocidad precavida por cualquier vehículousado para transportar la unidad. Usar las correas a tierra o cuerdas metálicas para inmovilizar launidad durante su transporte para prevenir daños. Para prevenir los daños en su almacenamientoy/o transporte, la unidad no debe ser mantenida en ambientes corrosivos. Los gabinetes estánespecialmente diseñados para un levantamiento seguro, usando una barra espaciadora colocada através de los parales que van hasta la parte superior de la unidad. La capacidad de levantamientodel automotor, debe ser revisada antes de mover la unidad del lugar.
Mirar Anexo A y H para tamaño, peso, rango y especificaciones de la unidad a ser instalada.
CHEQUEOS INICIALES
Antes de instalar el controlador, revisar la unidad para:• Daño físico del controlador. Daño visual del contenedor o gabinete.• Remover todos los materiales empaquetantes como cintas, espuma, contenedores de viaje y
rellenos.• Aplicación correcta. Los datos de la placa del controlador, transformador y la carga debe ser
compatibles.• Conexiones internas. Asegúrese de que las tarjetas de circuitos, cables, componentes y
conectores estén seguros en el lugar.
INSTALACION DEL CONTROLADOR
El gabinete del controlador general (NEMA 1, IP33) es adaptable para la mayoría de industrias oinstalaciones de salas de control. Sin embargo tenga cuidado al escoger la locación. El área debecontar con buena ventilación para no restringir el flujo de aire a través de la toma de filtros delcontrolador. La entrada y salida de aire fresco esta localizada en el frente del controlador, es poreso que los lados la parte trasera y la parte superior debe ser despejada. Un mínimo de 36 in (1m) por delante de la unidad es recomendado para el servicio. Las áreas con vapores de aceite onieblas, excesiva humedad o con humos de vapores corrosivos o inflamables deben ser evitadas.

9
El gabinete (NEMA 3, IP54) es recomendado para instalaciones puerta afuera en locaciones noriesgosas. Dejar un mínimo de 48 in. (1.22 m) de espacio en el frente y en la parte posterior delrecinto para servicio y requerimientos de ventilación. Nunca instale el controlador cerca de fuentesde generación de calor como transformadores u otros controladores. Es necesario tener una fuentede aire fresco (50° C máximo) como los ventiladores montados el la parte posterior del controlador.
INSTALACION ELECTRICA
Generalmente, el cable entra a través de la parte superior sobre la adecuación y a través del ladoderecho de la instalación del controlador. Adicionalmente, las series 2000, 4000 y 8000 manejanuna caja de conexión sobre el lado derecho del controlador para las conexiones del cable (Junctionbox). Para encontrar el cable de potencia adecuado, primero obtenga el tamaño del fusible delcontrolador del anexo E. Entonces, use la tabla en el apéndice D para encontrar el tamaño de

10
cable recomendado basado en amperaje requerido, temperatura ambiente 40° C y unatemperatura mínima de cable de 75°. Los cables de potencia de entrada deben ser instaladosconociendo los códigos eléctricos nacionales, basado en la máxima temperatura de ambiente.Conecte el cable de poder dentro de los terminales del switch de entrada (serie 1000 y todos loscontroladores NEMA 1), o a la caja de conexión (junction box) (controladores NEMA 3, 2000, 4000y 8000). Este controlador no necesita secuencia de fase para la conexión de potencia. La salida delcable de potencia es conectada a los terminales de entrada del transformador de alta cuando seutilice o a los terminales de entrada del motor eléctrico.
INSTALACION DE SISTEMA 12/18 PULSOS
Cuando es necesario minimizar la distorsión armónica sobre la línea de potencia utilizada, elElectrospeed GCS puede adecuarse para usar una configuración de 12 pulsos en el converter. Enesta configuración, un transformador desfazador adicionalmente se usa para crear 30 grados dedesface en la potencia de entrada. Las dos salidas de este transformador son conectadas a losconverter del controlador. Cuando requiera la conversión a 18 pulsos también puede serconfigurada.
INTERFACE DEL CABLEADO DEL CLIENTE
Los controles de entrada y salida instalados en fabrica son directamente cableados con cabezales“MOLEX” montados sobre la System Control Board. Los cables de control AC debe ser mínimo de14 AWG, y corrido en ductos separados del cableado DC. La entrada análoga (Análoga 1 y 2) debeser conectada con una protección aterrizada (shielded), con pares de cables trenzados de mínimo20 AWG.
ENTRADA DIGITAL
La system control board (SCB) provee tres posiciones o entradas digitales definidas como switchde cierre a tierra. Los terminales de entrada sobre la SCB J28 son los pins 1 hasta 4. Lasdefiniciones son las siguientes:Pin4 = Común, tierra digitalPin3 = Entrada Digital #3 (o modo switch manual)Pin2 = Entrada Digital #2 (o modo switch Auto-ReStart)Pin1 = Entrada Digital #1 (o switch START push-button)
Estas entradas son destinadas para señales originadas dentro de acoplesGCS únicamente, Ej.: PHD o MTM.

11
SALIDAS DIGILTALES
La SCB tiene tres salidas digitales usualmente utilizadas para switches externos como las luces depanel verde, amarilla y roja. Las terminaciones están localizadas sobre el sistema del conector dela SCB nombrado como J24. Todas las tres salidas son contacto seco (dry contact), normalmenteabiertas (N.O.) contactos de relevo con un rango de 10 Amps @ 250 Volts.
Los pines conectores para J24 son:Digital 1: Pin 1 y 3 (Luz verde “RUN”)Digital 2: Pin 5 y 7 (Luz amarillo)Digital 3: Pin 9 y 11 (luz roja)Los pines numerados 2,4,6,8,10 y 12 no tienen conexiones.
ENTRADAS ANALOGAS
La SCB tiene dos entradas análogas con rango de 0-10VDC, los terminales se encuentran sobreSCB en J26. La interfase es de señal de 4-20ma y requiere una conexión de una resistencia de500 ohm a través de los terminales “Entrada análoga” y “Tierra análoga”, los parámetros decalibración y compensación están en el menú de configuración de la entrada análoga. Lasdefiniciones de los pines son las siguientes:Pin 1 = Entrada análoga 1Pin 2 = Entrada análoga 2Pin 3 = Tierra común análoga

12
FUNDAMENTOS DEL GCS
PANTALLA GRAFICA (DISPLAY)
Esta parte del manual del operador GCS describe los principios básicos del sistema operativo delcontrol gráfico. También describe la operación del teclado, la pantalla LCD y todos los parámetrosdisponibles. Para encontrar información perteneciente a algún parámetro especifico, use el la tablade contenido de este manual. El controlador del Electrospeed GCS utiliza una pantalla de cristallíquido (LCD) como su interface de operación primaria. Usando este display, el operador puede very modificar todos los setpoints que hay en el controlador. Cuando El Electrospeed GCS esencendido por primera vez, el display mostrara el menú principal MAIN MENU. Igual a como se veen la ilustración izquierda.
La interfase tiene varias teclas cuyas funciones están definidas a continuación:
• La tecla verde START es presionada para encender el motor manualmente.
• La tecla roja STOP detiene manualmente el motor y es usada también para borrar o resetearuna condición de bloqueo (lockout).
• Las teclas de flechas son usadas para mover el cursor en la pantalla o para aumentar odisminuir números cuando se calibra o edita un setpoint.
• La tecla ENTER es usada para seleccionar un menú resaltado o para programar o finalizar unvalor de un setpoint.
• La tecla MENU es usada como cancel para abortar cualquier ajuste en progreso. Se presionaMENU repetidamente para acceder a la pantalla del menú principal.
Los LEDs verde, amarillo y rojo indican el estado actual del motor. El verde indica que el sistemaesta corriendo. El verde con el amarillo titilando indica que el controlador esta temporizando la

13
activación de una alarma para la detención. El amarillo solo indica que el sistema esta parado,pero todas las alarmas están limpias y se está temporizando para un re-encendido automático. ElLED Rojo indica que el sistema esta parado y que el re-encendido automático esta inhabilitado, y/olas alarmas activas existen por esto el controlador no se re-encenderá por sí solo.
DESPLEGAR UN MENU, (READING OR SETPOINT)
El operador interactúa con el Electrospeed GCS presionando las teclas debajo del display. Uselas flechas para mover el puntero resaltado al menú que se necesita y presione el botón ENTERpara seleccionar este ítem. (Aunque el puntero resaltado cambie de apariencia dependiendo de lainformación mostrada en la pantalla, este siempre estará en “color inverso” con respecto al texto dela pantalla.) Ejemplo: para mostrar el estado de operación actual del motor, use las flechas paramover el puntero a la posición “STATUS” en el centro de la pantalla como es mostrado en lapágina anterior y presione la tecla ENTER. El GCS mostrara la pantalla de estado, esta contieneinformación del estado de funcionamiento igual a la pantalla mostrada a la izquierda. Para volver almenú previo, presione la tecla MENU y el display cambiara a la pantalla del menú principal “MAINMENU”.

14
GCS CONVENCIONES PARA EL DISPLAY
Todos los menús del GCS usan símbolos comunes para mostrar la información. Por ejemplo,cuando una pantalla de un menú contiene más información que la que puede mostrar el display, lagráfica !MORE! aparecerá al fondo de la pantalla. Esta gráfica indica que usando las teclas delas flechas se puede mover el cursor al fondo de la pantalla y el texto se desplazara hacia arribahasta que la última línea del menú haya sido mostrada. Varias pantallas del menú pueden tambiéntener texto hacia la izquierda y derecha para ser mostrado con sus respectivas teclas. Esto seindica por las gráficas "MORE" y #MORE# que aparecen a la izquierda y derecha de la barra dearriba de la pantalla. Cuando un parámetro puede ser modificado, aparece una pequeña flecha "a su derecha en el fin de la línea. Note que solo algunos de estos parámetros en la pantalla deejemplo pueden ser editados.
" Este puntero al final de la línea indica que el parámetro puede ser editado.
"MORE" Indica que puede acceder a menús adicionales oprimiendo la flecha izquierda.
#MORE# Indica que puede acceder a menús adicionales oprimiendo la flecha derecha.
$MORE$ !MORE! Mas información o items adicionales del menú pueden ser alcanzadospresionando flecha abajo.
EDICION DE UNA LECTURA O CONFIGURACIONCualquier parámetro dentro del Electrospeed GCS que pueda ser editado o cambiado mostrarauna pequeña flecha al lado derecho sobre la barra del cursor. Para editar cualquier de estosparámetros use las flechas de dirección y oprima tecla ENTER hasta resaltar el punto deseado porel cursor. Presione la tecla ENTER para activar el modo editar para el punto seleccionado. El valoractual del parámetro aparecerá en color opuesto como se muestra en la ilustración.
Ahora presionando las teclas de dirección inferior y superior causaran un aumento o disminucióndel valor. Cuando la lectura alcance el valor deseado, suelte la flecha, y presione ENTER para
15
guardar el cambio efectuado. Si el usuario desea abortar el cambio que esta realizandosimplemente oprima menú para cancelarlo.
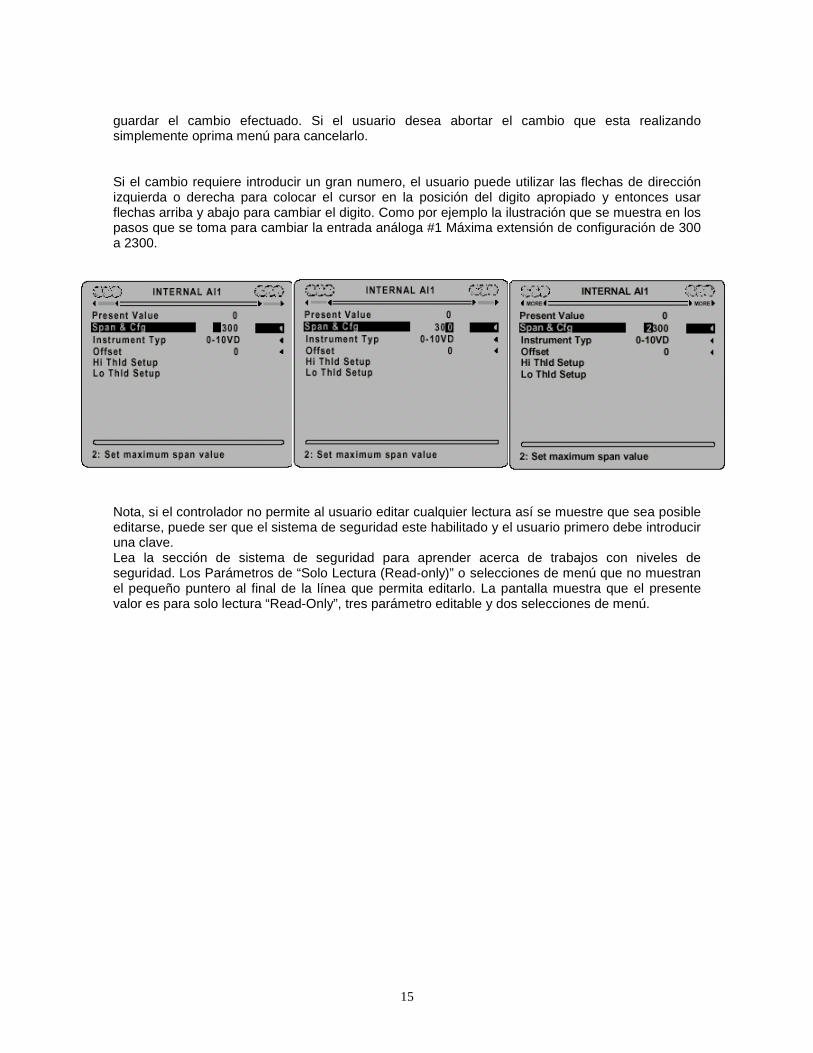
Si el cambio requiere introducir un gran numero, el usuario puede utilizar las flechas de direcciónizquierda o derecha para colocar el cursor en la posición del digito apropiado y entonces usarflechas arriba y abajo para cambiar el digito. Como por ejemplo la ilustración que se muestra en lospasos que se toma para cambiar la entrada análoga #1 Máxima extensión de configuración de 300a 2300.
Nota, si el controlador no permite al usuario editar cualquier lectura así se muestre que sea posibleeditarse, puede ser que el sistema de seguridad este habilitado y el usuario primero debe introduciruna clave.Lea la sección de sistema de seguridad para aprender acerca de trabajos con niveles deseguridad. Los Parámetros de “Solo Lectura (Read-only)” o selecciones de menú que no muestranel pequeño puntero al final de la línea que permita editarlo. La pantalla muestra que el presentevalor es para solo lectura “Read-Only”, tres parámetro editable y dos selecciones de menú.

16
OPERACION BASICASWITCHES DE ENCENDIDO/PARADA
El display del Electrospeed GCS tiene un botón para arrancar y parar. Para arrancar el motormanualmente, oprima el botón de START. Para parar el motor operando normalmente, o paraborrar una condición de bloqueo oprima el botón STOP sobre la unidad de display.
SELECCION MODO MANUAL/AUTO
El modo operacional manual o auto esta determinado por la condición del parámetro de losrearranques internos automáticos INTERNAL AUTO RESTARTS (Int Auto Rstrt) este parámetro seencuentra sobre la pantalla de arranque STARTS screen del menú EsSpeed GCS Setup. Cuandoeste parámetro es configurado YES, el Rearranque Automático es habilitado. El controladorautomáticamente arrancará el motor después de que pase el time delay si no hay alarmas activas.El motor puede ser arrancado en cualquier momento presionado el botón de start al menos de quesi la configuración del WAIT FOR RESTART TIMER (Wait Fr Rstrt T) esta habilitada. En este caso,el motor no arrancara hasta que el time delay pase. En caso de que el GCS no arranque puede serdebido a que las alarmas estan activas y no tienen ningún time delay asociado para el start. Si unshutdown ocurre que cause una condición de bloqueo, este debe ser borrado antes de que elcontrolador intente otro arranque. La condición de lockout puede ser borrada presionando el botónSTOP sobre el display del controlador. Cuando la configuración de INTERNAL AUTO RESTARTS(Int Auto Rstrt) es NO, el modo manual de operación esta seleccionado. Cuando este modo estaseleccionado, el motor puede solo ser arrancado manualmente presionando el botón START.

17
PANEL DE SWITCHES MONTADOS EXTERNAMENTEMANUAL/APAGADO/ARRANQUE /AUTOMATICO (HAND/OFF/AUTO Y START)
El modo de operación del controlador también puede ser determinado de una forma opcional, conswitches montados externamente del modo Hand/Off/Auto (HOA) y el switch START. Para arrancarel motor en una condición de apagado o boqueo (shutdown o lockout), se borra manualmentecambiando la posición del switch HOA a la la posición de OFF y entonces retroceder al mododeseado de operación, HAND o AUTO.Si externamente, el switch es usado, este seguro de habilitarlo configurando el EXTERNAL HOA aYES. Este parámetro se encuentra en un sub menú del menú SCADA & SECURITY & SYSTEM.
Parámetros de rearranques auxiliaresCuando el controlador GCS ha sido configurado para rearrancar automáticamente, estenormalmente usa 2 parámetros globales, Maximum Allowed Restarts y Restart Time Delay. Estosparámetros determinan cuantos arranques son permitidos y cuanto tiempo espera antes de intentarel siguiente. Sin embargo, bajo algunas circunstancias puede ser conveniente configurar estosparámetros basándose en el porque de la causa del shutdown. Cada alarma de shutdown en elControlador GCS tiene una asociación de configuración conectadas con los parámetros dearranque. Cuando estos parámetros están habilitados, ellos controlan el intento de rearranque. Siestos parámetros no están habilitados pero automáticamente los rearranques son permitidos, elcontrolador usara el time delay del rearranque global e intentara arrancar
LEDS VERDE AMARILLO Y ROJO
La unidad de Electrospeed GCS tiene unos LEDs (Light Emitting Diodes) verde, amarillo y rojodentro de él. Estas luces funcionan ligeramente diferente a cualquier panel de luces externo,adicionalmente el panel de luces no se afecta por el modo de operación del controlador.Estas luces pueden ser usadas en combinaciones que muestran los estados de operación así:
Luz verde prendida permanente: El motor esta operando sin shutdowns o alarmas pendientes.
Luz verde con la luz amarillo intermitente: El motor esta corriendo, pero una alarma esta activay su conexión de time delay esta contando para terminar. Si la alarma persiste después de haberterminado el time delay, el motor tendrá un shutdown.
Luz amarilla prendida permanente: El motor esta parado, pero no hay alarmas activas y el motorserá automáticamente rearrancado cuando un temporizador halla terminado su conteo. Si elparámetro “Esperando para rearrancar” (Wait for Restart Timer) esta deshabilitado, el motor puedeser arrancado en cualquier momento presionando el botón de start.

18
Luz roja prendida permanente: El motor esta parado por un operador o un comando de shutdowndel computador central.
Luz roja intermitente: El motor esta parado debido a una de las alarmas habilitadas. Elrearranque no ocurrirá sin la intervención del operador.
Luz roja intermitente con amarilla: El motor esta parado debido a que una de las alarmas estahabilitada. El rearranque ocurrirá cuando el temporizador halla terminado.
CONEXION PANEL DE LUCES EXTERNO, LUCES ROJA AMARILLA Y VERDE
Opcional, el panel de luces externo puede ser conectado a tres salidas digitales. Las tres salidasdigitales corresponden a las luces roja, amarilla y verde que están localizadas sobre la SCB(system control board) en los conectores marcados como J24. La salida digital 1 corresponde a laluz verde, salida digital 2, la luz amarilla y la salida digital 3 la luz roja. Todas las tres salidas son“dry contact”, normalmente abierto (N.O.) contacto de relay con un rango para 10 Amps @ 250Volts.
PANEL DE LUCES
La luz roja indica que el motor esta parado y no ocurrirá un rearranque automático. Esto puede serporque:1. Una alarma se mantiene activa, o2. La ultima parada causo una condición de bloqueo, o3. El switch Hand/Off/Auto esta en posición OFF o Hand; o4. El controlador ha recibido un shutdown del computador central.
La luz amarilla indica que el motor esta parado, pero todas las alarmas están borradas y elcontrolador esta contando para ejecutar el “Rearranque Automatico Programado” (RESTART TIMEDELAY). Cuando este temporizador acabe, el Electrospeed GCS automáticamente se rearrancará.
La luz de panel verde indica que el motor esta funcionando.

19
INDICACION DE ALARMA Y SHUTDOWN
El Electrospeed GCS siempre enuncia la información de alarmas y shutdowns en el menú deSTATUS en la unidad de display. El controlador además mostrara una alarma de alerta después deque ocurra cualquier shutdown. Este pantallazo de alerta se muestra en la parte superior de otrospantallazos y muestra el momento y la causa del porque el motor se apago. Oprima menú oENTER para conocer o limpiar la pantalla y retornara al menú principal.
CONDICION DE BLOQUEO (LOCKOUT)
Cualquiera de las alarmas protectoras de shutdown puede ser configurada causando una condiciónde lockout y esta situación es indicada por “LK” o “LKout” acompañado de la causa de shutdown. Sise encuentra en esta condición, no arrancara de ninguna forma, manual ni automática, hasta que elLK sea borrado. Un lockout es borrado oprimiendo el botón de STOP en el keypad o cambiando laposición del modo switch HAND/OFF/AUTO (si esta instalado), a OFF y volver a HAND o AUTO.
SISTEMA DE SEGURIDAD
El Electrospeed GCS tiene una protección de seguridad capaz de guardar la configuración paraevitar que personal sin autorización la modifique. La seguridad es iniciada por un código numéricoo password dentro de los niveles de configuración 1 y/o 2. Si el password es aplicado para un nivelde seguridad, entonces el operador para editar o leer la configuración en ese nivel de seguridaddeberá introducir el mismo código para que sea permitido.
Sin esta clave de seguridad, el operador podría ver la mayoría de los display pero seria incapaz deeditarlos o cambiarlos.
El nivel 1 de seguridad da el acceso para las configuraciones que mas comúnmente se trabajan,como modificar el valor al cual comienza a activarse las alarmas de protección. El nivel 2 daacceso a la mayoría de las otras configuraciones. El controlador es transportado desde la fabricacon toda la protección deshabilitada. Si un operador no esta autorizado para cambiar el setpoint enel campo, una clave de seguridad debe ser instalada por personal local. Este personal localtendría que conocer cuales son los códigos de seguridad instalándolos de la siguiente forma: En elmenú de SCADA & SYSTEM & SECURITY buscar el pantallazo de security. El password deusuario es encontrado en el pantallazo de GCS Setup 2.

20
SISTEMA DE RELOJ
El Electrospeed GCS usa una batería apoyado en un reloj en tiempo real para mantener el tiempode las funciones. Todos los eventos y paradas son grabados en la fecha y tiempo de ocurrencia.Una batería provee al sistema para que mantenga el reloj andando en una eventual falla depotencia o shutdown. El sistema de tiempo puede ser modificado a la fecha y hora actual entrandolos datos deseados dentro del sub menú de SET TIME encontrado en el menú de SCADA &SECURITY & SYSTEM. Este ajuste mantendrá el aparato por el año 2000.
AJUSTE DE CONTRASTE
El GCS display usa un circuito sensor de temperatura para ajustar automáticamente el contraste deLCD. Si se necesita ajustar manualmente el nivel de contraste oprima las flechas izquierda yderecha al mismo tiempo solo un momento, y un pantallazo de ajuste de pantalla aparecerá, dondepara configurarlo se utiliza las flechas arriba y abajo para aumentar o disminuir el contraste.

21
El CITIBus es el nombre de la marca registrada de la conexión de hardware/software ycomunicación entre los diferentes módulos de GCS conectados bajo una misma configuración.Esta información puede ser usada para diagnosticar problemas en dado caso de que surjan.
REVISION DEL SOFTWARE
Esta pantalla también muestra los niveles de revisión del software cargado dentro de la unidad.Como esta ilustrado en la figura, la unidad GCS muestra la revisión para la marca del software quelleva los registros. Si una unidad de memoria fuese instalada, su numero de revisión de softwareseria mostrado. Si este no esta instalado bajo esta configuración, muestra n/a (no aplica).
Contacte personal de Centrilift para actualización de software si es requerido. Cuando los botonesde la flecha izquierda o derecha son presionados mientras esta en la pantalla de ajuste decontraste el segundo pantallazo será mostrada.
La pantalla de diagnostico del sistema muestra las causas o tipos de cualquier reset que losmicroprocesadores hallan recibido. La columna de HST representa el sistema controlador local uanfitrión, (en este caso, Hst es un Electrospeed GCS), mientras que la columna de DSP representala unidad grafica o salida de datos. Una vez el ajuste este completo, oprima ENTER o MENU pararetornar al GCS menú system.

22
MENUS DEL GCS
La siguiente sección listara y dará explicación de todos los menús y parámetros que estándisponibles al usuario. El orden en el cual son listados los parámetros esta basado en la pantalladel menú principal MAIN MENU, como es mostrado abajo, siguiendo el sentido de las agujas delreloj desde ESPEED GCS SETUP. Algunas de las pantallas de los menús son más grandes quelas 11 líneas de texto mostradas en el display. Para claridad muchas de estas pantallas semostrarán dentro de este manual más grandes que lo que normalmente son para mostrar todos losparámetros disponibles. Para localizar información perteneciente a algún parámetro especifico,use el índice al final de este manual.
Estructura del Menú del Electrospeed GCS

23
PANTALLA DE ESTADO
La pantalla de estado es la principal del operador. Desde aquí, el operador puede ver muchos delos parámetros necesitados cuando están determinando el estado del funcionamiento delcontrolador. Como se ilustra a continuación, la pantalla contiene la siguiente información.
El motor esta funcionando a 58.8 Hz
El mas reciente shutdown fue causado poruna condicion de lockout por overload, enfebrero 15, 1998 a las 11:17:12 pm tiempolocal
Las corrientes de salida son 51, 52 y 49,el voltaje es de 480 VAC
Entrada análoga #1 mide presión delpozoEntrada análoga #2 barriles por día delíquido producido
El controlador está detectando unaalarma de baja carga y está esperandopara el tiempo de demora antes deapagar (shutdown) el motor.
Dirección de rotación = Hacia delanteControl de velocidad = Punto de ajuste por frecuenciaLa gráfica de Amp puede ser ampliada presionandola tecla ENTERSi la unidad esta bloqueada (locked out), el iconoque lo indica es mostrado también aquí.

24
CONFIGURACION ESPEED GCSCuando el cursor se mueve al centro de la parte superior del menú principal y se presiona ENTER,la primera de tres pantallas de GCS DRIVE SETUP aparece. Estas pantallas recogen muchos delos parámetros necesitados para que comience a funcionar el Electrospeed GCS. Para mostrarotra pantalla presione la tecla de la flecha izquierda o derecha. Para editar cualquier parámetro,use las teclas de las flechas para seleccionar cualquiera del menú y presione ENTER. El GCSpasara a modo de edición y permitirá cambio en el valor de este parámetro. Las tres pantallasdisponibles dentro de este grupo son GCS SETUP 1, GCS SETUP 2 y STARTS. Cada una sedescribe a continuación.
CONFIGURACION GCS 1 (GCS SETUP 1)
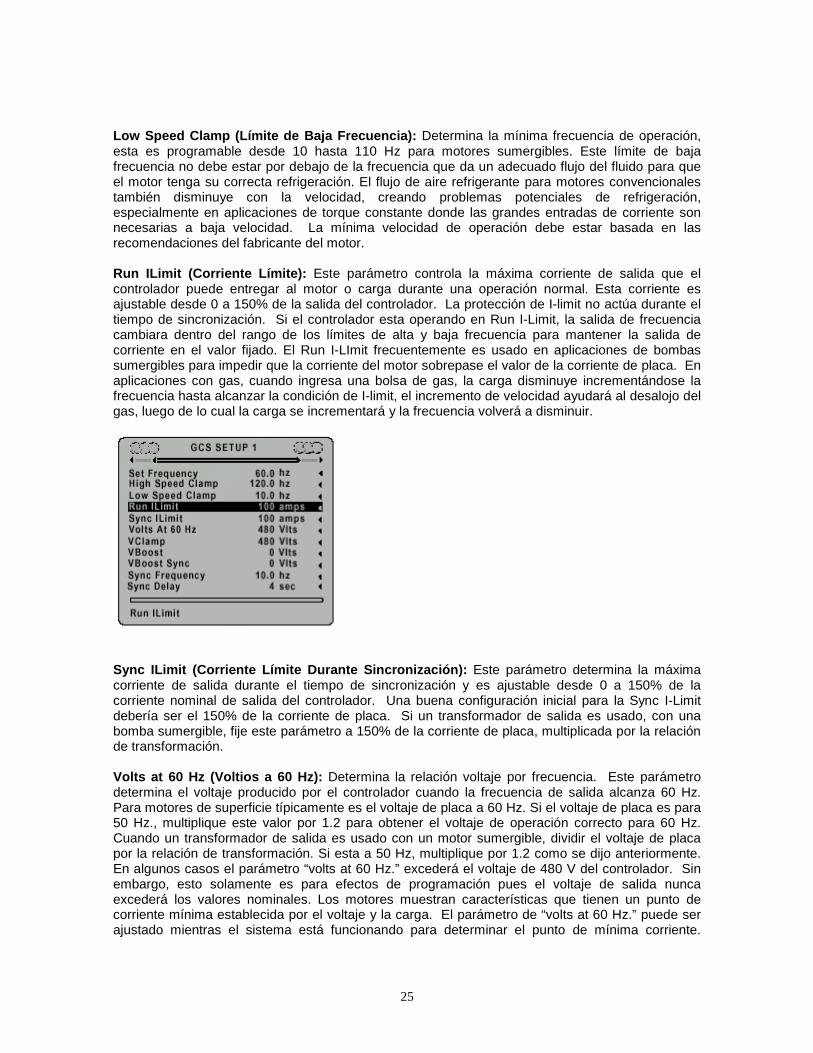
Set Frecuency (Selección de Frecuencia): Indica la frecuencia de operación seteada, mientraseste trabajando en modo de frecuencia. La frecuencia se ajusta en incrementos de 0.1 Hz. Entrelos limites de baja y alta velocidad (Low Speed Clamp y High Speed Clamp). La frecuencia deoperación también puede ser limitada por el parámetro de límite de corriente (Run I-Limit).
High Speed Clamp (Límite de Alta Frecuencia): Este parámetro determina la máxima frecuenciaque el Electrospeed GCS permite operar y es programable entre 10 y 120 Hz. La máximafrecuencia de operación no debe exceder el límite de alta frecuencia, así lo recomienda losfabricante. La operación de equipo rotante sobre sus máximas capacidades de velocidad puedecausar el daño de este y lesiones al personal.
25
Low Speed Clamp (Límite de Baja Frecuencia): Determina la mínima frecuencia de operación,esta es programable desde 10 hasta 110 Hz para motores sumergibles. Este límite de bajafrecuencia no debe estar por debajo de la frecuencia que da un adecuado flujo del fluido para queel motor tenga su correcta refrigeración. El flujo de aire refrigerante para motores convencionalestambién disminuye con la velocidad, creando problemas potenciales de refrigeración,especialmente en aplicaciones de torque constante donde las grandes entradas de corriente sonnecesarias a baja velocidad. La mínima velocidad de operación debe estar basada en lasrecomendaciones del fabricante del motor.
Run ILimit (Corriente Límite): Este parámetro controla la máxima corriente de salida que elcontrolador puede entregar al motor o carga durante una operación normal. Esta corriente esajustable desde 0 a 150% de la salida del controlador. La protección de I-limit no actúa durante eltiempo de sincronización. Si el controlador esta operando en Run I-Limit, la salida de frecuenciacambiara dentro del rango de los límites de alta y baja frecuencia para mantener la salida decorriente en el valor fijado. El Run I-LImit frecuentemente es usado en aplicaciones de bombassumergibles para impedir que la corriente del motor sobrepase el valor de la corriente de placa. Enaplicaciones con gas, cuando ingresa una bolsa de gas, la carga disminuye incrementándose lafrecuencia hasta alcanzar la condición de I-limit, el incremento de velocidad ayudará al desalojo delgas, luego de lo cual la carga se incrementará y la frecuencia volverá a disminuir.
Sync ILimit (Corriente Límite Durante Sincronización): Este parámetro determina la máximacorriente de salida durante el tiempo de sincronización y es ajustable desde 0 a 150% de lacorriente nominal de salida del controlador. Una buena configuración inicial para la Sync I-Limitdebería ser el 150% de la corriente de placa. Si un transformador de salida es usado, con unabomba sumergible, fije este parámetro a 150% de la corriente de placa, multiplicada por la relaciónde transformación.
Volts at 60 Hz (Voltios a 60 Hz): Determina la relación voltaje por frecuencia. Este parámetrodetermina el voltaje producido por el controlador cuando la frecuencia de salida alcanza 60 Hz.Para motores de superficie típicamente es el voltaje de placa a 60 Hz. Si el voltaje de placa es para50 Hz., multiplique este valor por 1.2 para obtener el voltaje de operación correcto para 60 Hz.Cuando un transformador de salida es usado con un motor sumergible, dividir el voltaje de placapor la relación de transformación. Si esta a 50 Hz, multiplique por 1.2 como se dijo anteriormente.En algunos casos el parámetro “volts at 60 Hz.” excederá el voltaje de 480 V del controlador. Sinembargo, esto solamente es para efectos de programación pues el voltaje de salida nuncaexcederá los valores nominales. Los motores muestran características que tienen un punto decorriente mínima establecida por el voltaje y la carga. El parámetro de “volts at 60 Hz.” puede serajustado mientras el sistema está funcionando para determinar el punto de mínima corriente.

26
Aumentando o disminuyendo este parámetro a unos pocos voltios mientras se monitorea lacorriente se determinara este punto.
Vclamp (Voltaje Máximo): Programa la máxima salida de voltaje que producirá el controlador acualquier frecuencia y determina cuando el controlador comienza la operación a una potenciaconstante. VClamp es ajustable desde 100 a 550 VAC. Una configuración típica debería ser 480VAC para una entrada de 460/480VAC o 400VAC para 380/400VAC. La máxima salida de voltajeserá aproximadamente 5% mayor que la entrada de voltaje, pero no podrá superar los 550 VAC.
Vboost (Voltaje de Refuerzo): Suministra un incremento de voltaje que varía en forma inversa conla frecuencia; la relación voltios por hertz es modificada internamente de forma tal que el efectoVboost disminuye linealmente con la velocidad, siendo cero a la máxima frecuencia. A bajasfrecuencias, es algunas veces deseables incrementar el voltaje por encima de lo normal ya que laimpedancia del motor se vuelve más significante que la reactiva. Esto puede limitar la corriente deexcitación del motor, reduciendo el torque disponible a bajas velocidades. Aumentando el VBoost,el desempeño a baja frecuencia puede ser mejorado y también se puede compensar el efecto de lacaída de voltaje en el cable y el transformador. Esto será más pronunciado a bajas frecuencias. ElVBoost no estará activo durante Sync Delay. En la configuración inicial se deberá dejar elparámetro VBoost en cero, y después incrementarse cuando sea necesario. Generalmente VBoostno es usado con cargas de torque variable, ya que la carga del motor disminuye dramáticamentecon la velocidad, mas aun el decremento efectivo en voltaje experimentado a baja frecuenciapuede mejorar la eficiencia de los motores sin carga. Sin embargo las cargas de torque constante,requieren de grandes torques incluso a bajas velocidades, haciendo necesario el uso de VBoost enestas aplicaciones de torque constante. Una manera de determinar el valor adecuado de VBoosten una aplicación de torque constante es operar el controlador a mínima velocidad, y ajustarVBoost para obtener la corriente mínima. Similar a la técnica descrita en la sección de Volts at 60Hz.
VBoost Sync (Voltaje de Refuerzo durante la Sincronización): Permite que el voltaje de salidasea incrementado respecto al voltaje a la frecuencia de arranque durante el tiempo desincronización. VBoost Sync realiza las mismas funciones que VBoost pero esta presente solodurante el arranque permitiendo una compensación para las caídas de voltaje asociada con lacorriente de arranque. El valor de VBoost Sync se deberá fijar a cero para el arranque inicial, yaumentarlo solo si hay dificultades en el arranque. (Por Ej. bomba pegada) La salida de corrientedebería ser monitoreada durante el intento de arranque inicial para determinar la corriente máximade salida en un caso de arranque fallido. Si la corriente de salida no alcanza el valor del parámetroI-Limit Sync indica que incrementando VBoost Sync podría incrementar la corriente de salida.VBoost Sync es ajustable de 0 a 200 VAC.
27
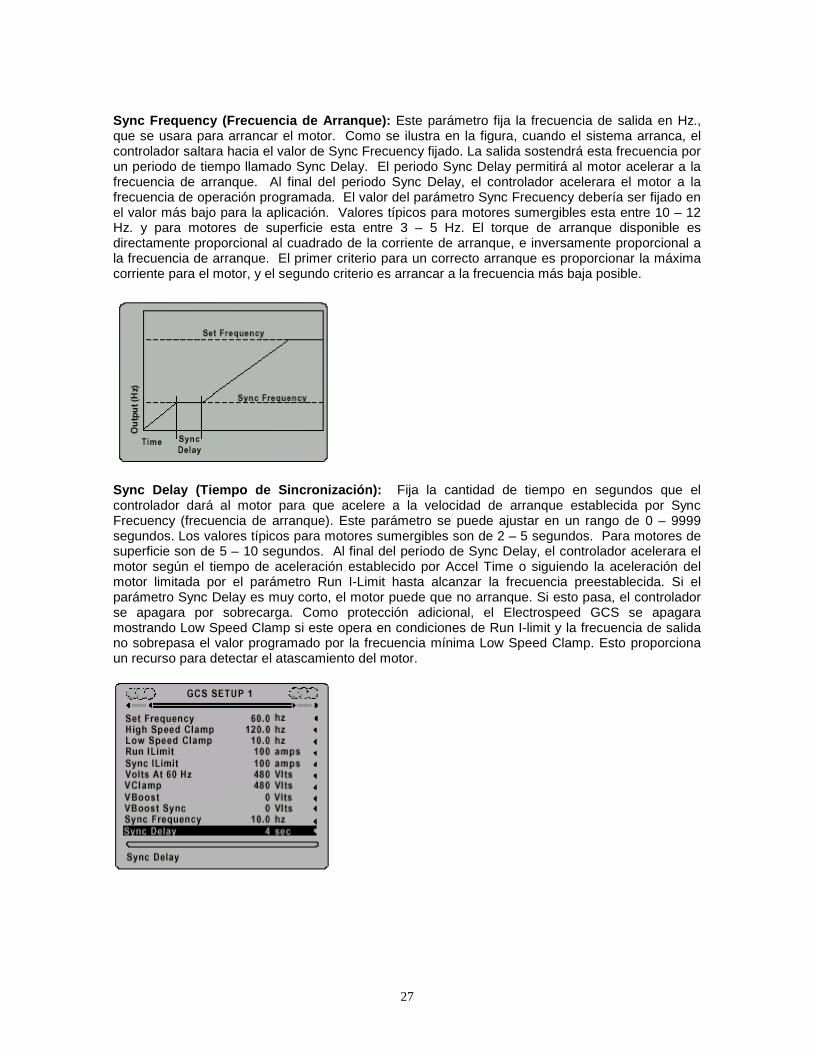
Sync Frequency (Frecuencia de Arranque): Este parámetro fija la frecuencia de salida en Hz.,que se usara para arrancar el motor. Como se ilustra en la figura, cuando el sistema arranca, elcontrolador saltara hacia el valor de Sync Frecuency fijado. La salida sostendrá esta frecuencia porun periodo de tiempo llamado Sync Delay. El periodo Sync Delay permitirá al motor acelerar a lafrecuencia de arranque. Al final del periodo Sync Delay, el controlador acelerara el motor a lafrecuencia de operación programada. El valor del parámetro Sync Frecuency debería ser fijado enel valor más bajo para la aplicación. Valores típicos para motores sumergibles esta entre 10 – 12Hz. y para motores de superficie esta entre 3 – 5 Hz. El torque de arranque disponible esdirectamente proporcional al cuadrado de la corriente de arranque, e inversamente proporcional ala frecuencia de arranque. El primer criterio para un correcto arranque es proporcionar la máximacorriente para el motor, y el segundo criterio es arrancar a la frecuencia más baja posible.
Sync Delay (Tiempo de Sincronización): Fija la cantidad de tiempo en segundos que elcontrolador dará al motor para que acelere a la velocidad de arranque establecida por SyncFrecuency (frecuencia de arranque). Este parámetro se puede ajustar en un rango de 0 – 9999segundos. Los valores típicos para motores sumergibles son de 2 – 5 segundos. Para motores desuperficie son de 5 – 10 segundos. Al final del periodo de Sync Delay, el controlador acelerara elmotor según el tiempo de aceleración establecido por Accel Time o siguiendo la aceleración delmotor limitada por el parámetro Run I-Limit hasta alcanzar la frecuencia preestablecida. Si elparámetro Sync Delay es muy corto, el motor puede que no arranque. Si esto pasa, el controladorse apagara por sobrecarga. Como protección adicional, el Electrospeed GCS se apagaramostrando Low Speed Clamp si este opera en condiciones de Run I-limit y la frecuencia de salidano sobrepasa el valor programado por la frecuencia mínima Low Speed Clamp. Esto proporcionaun recurso para detectar el atascamiento del motor.

28
GCS SETUP 2
A este menú se accede desde la pantalla del menú GCS SETUP 1 presionando la tecla de la flechaderecha.
Accel Time (Tiempo de aceleración) Fija el tiempo requerido por el controlador para aumentar sufrecuencia de salida en 60Hz. Este es ajustable entre 2 y 200 segundos. La aceleración nocomienza hasta que el tiempo de Sync Delay haya terminado. Para determinar la relación de(Hz./sec) real, dividir 60 entre este tiempo en segundos. Si el controlador suministra la suficientecorriente la aceleración del motor estará determinada por este parámetro. De otra manera laaceleración será limitada por a corriente disponible configurada con el parámetro (I-Limit). Cuandose opera en el modo de configuración el tiempo de aceleración, (Accel Time), debe ser ajustado alvalor mínimo, 2 segundos, para permitir que la respuesta del controlador sea regulada por elalgoritmo de control del setpoint.
Decel Time (Tiempo de desaceleración): El tiempo de desaceleración fija el tiempo requerido porel controlador para reducir la frecuencia de salida en 60 Hz y es ajustable desde 2 a 200 segundos.Para determinar la relación de (Hz./seg) real, dividir 60 entre el tiempo fijado en segundos. Si elcontrolador está operando con una carga de alta inercia, la relación de desaceleracion puede serlimitada por regeneración. Una carga inductiva girando se convierte de hecho en un generación deinducción y suministra energía al bus DC. Para prevenir una condición de sobrevoltaje en el busDC el controlador seguirá disparando la sección inversora según la relación dada por el parámetroVoltios a 60 Hz, el controlador seguirá al motor conforme vaya bajando su velocidad. Cuando seopera en el modo de control de “Setpoint”, el tiempo de desaceleración Decel Time debe ser fijadoal valor mínimo, 2 segundos, para permitir que la respuesta del controlador sea regulada por elalgoritmo de control del set point.
Inverter Mode (Modo de Operación): Programa o selecciona la forma de la onda de salida queproducirá el GCS. Hay tres modos posibles:
ESP El modo ESP produce una forma de onda seudo-sinusoidal que tiene 6transiciones (6 pasos de salida) de voltaje en la señal creada. (VariableVoltege, six step pseudo sine wave).
HYB Hybrid PWM crea un voltaje variable, con forma de onda conmodulación de ancho de pulso PWM que puede ser útil en algunasaplicaciones para reducir las armónicos de corriente en el motor. Hybrid

29
PWM puede también reducir picos de voltaje en el cable bajo algunascondiciones.
PWM El modo PWM es standard, con el todo el voltaje en el bus, con formade onda con ancho de pulso modulado. Esta salida tiene su mejor aplicaciónen motores de superficie donde el transformador de alta no es usado y elcable de potencia del controlador al motor es relativamente corto.
Inverter Rotation (Cambiar la Rotación): Controla la dirección de la rotación con las fases desalida del controlador. Las opciones son: FWD (Hacia delante) y REV (reversa). Esta rotación esdefinida por la secuencia de fases de rotación de las tres salidas de voltaje o corriente ABC (Haciadelante) o CBA (reversa).
Control Mode (Modo de Control): Este parámetro selecciona el modo de control el cualgobernara la salida del controlador. Hay tres modos disponibles:
FR SET (Programar Frecuencia): Este modo hace que el ElectrospeedGCS opere a la frecuencia programada por el usuario en el parámetro SetFrecuency, programada en el menú GCS Setup 1. Note que muchosfactores pueden afectar la capacidad del controlador para alcanzar estafrecuencia (ILimit, High Speed Clamp, y Low Speed Clamp).
AN FOL (Modo Seguidor Análogo): En el modo de seguidor análogo, elcontrolador procurará variar la frecuencia de salida entre los limites LowSpeed Clamp y High Speed Clamp en una proporción de 0 a 100% de laseñal análoga de entrada seleccionada. El parámetro que afecta estemétodo de control se encuentra en el menú Prog Logic Funct.
PID (Modo de Control Proporcional Integral Derivativo): En el modo decontrol PID, el controlador variará la frecuencia de salida manteniendo unaseñal análoga de entrada. Los parámetros que afectan este lazo cerrado decontrol se encuentran en el menú Prog Logic Funct.
Regulator Gain (Ganancia del Regulador): Controla la respuesta del lazo de control de voltajedel BUS a los cambios en el voltaje de entrada, la corriente de carga y frecuencia de salida.Regulator Gain es ajustable de 0 a 100% con una configuración de fabrica de 55%. Incrementandoeste parámetro la velocidad de respuesta del regulador aumenta y puede ser usado paracompensar inestabilidades en el sistema de potencia. Cuando se opera sin carga, la ganancia deeste parámetro ser fijada al 50% o mayor para obtener una salida de voltaje estable.
Slip Comp (Compensación de Deslizamiento): Proporciona una corrección a la velocidad delmotor, de forma proporcional a la corriente de salida por medio de un incremento de la frecuencia yel voltaje del inversor para compensar el deslizamiento del motor de inducción con la carga. Esajustable de 0 a 7% en incrementos de 0.1%. SLIP COMP es empleado cuando se desea uncontrol de velocidad preciso en condiciones de carga altamente variable. Programe este valorsegún sea el deslizamiento del motor a plena carga (en porcentaje).

30
Jog Freq (Frecuencia con Pulsador): Básicamente determina una frecuencia de operación,activado por la cerrada de contacto en los terminales JOG de entrada. Mientras Jog Input esteactivo, el controlador realiza la rutina de arranque y trabaja a la frecuencia indicada por Jog Freq.El controlador operara a esta frecuencia el tiempo en que jog input este activa. Una vez removidala señal, el controlador ejercerá una detención controlada.
Freq Avoid Cfg (Configuración de Frecuencia Evitada): Da acceso a una tabla programable porel usuario de cinco frecuencias de salida no permitidas para la operación del controlador. PresioneENTER cuando este ítem este resaltado para acceder a la tabla.
Freq Avoidance (Frecuencia Evitada): Esta tabla permite al usuario especificar cinco frecuenciasindividuales que el controlador no producirá. Cada frecuencia tiene un valor de banda muerta(deadband) asociado. Este valor de deadband le dice al controlador que valores cerca de lafrecuencia deshabilitada no puede producir. Como se ilustra a la izquierda, la primera frecuenciaha sido fijada en 9.5 Hz. con un deadband de 1.0 Hz. Esto significa que el Electrospeed GCS nopermitirá una operación constante en el rango de 8.5 a 10.5 Hz. El controlador producirá estasfrecuencias solas mientras se esta pasando de un lado del rango prohibido al otro lado. Estosvalores pueden ser usados para prevenir vibraciones indeseadas que pueden ser generadas comoresultado de resonancia del equipo a frecuencias especificas.

31
Drive Mdl Num (Número del Modelo del Controlador): Muestra el modelo de este controlador.La base del número de modelo para cada Electrospeed GCS es guardada en memoria en la tarjetaque controla el sistema con los limites inferiores y superiores de los parámetros del controlador.Cada vez que el controlador es encendido, el recuperara el número de modelo y límites asociadosde la memoria. Este número debe coincidir con el número en la placa sobre la caja del controlador.
Torque Rating (Relación de Torque): Indica el tipo de torque de salida que el controladorproducirá. Constante (CT) o Variable (VT). Los modelos básicos del Electrospeed GCS estánconfigurados para cargas de torque variable. Contáctese con personal de Centrilift para convertir acargas de torque constante. Esto demejorara la salida de corriente y KVA en un 20%, pero lasobrecarga y la corriente de arranque serán las mismas.
Single ø Vlts (Fase Sencilla): Este parámetro configura al controlador para que opere con unafuente de potencia de una sola fase contraria a una fuente de tres fases como es usual. La fuentedebe ser conectada en los terminales A y B. La salida de potencia de tres fases es desmejoradaen reflejo de la baja potencia disponible. Esta configuración puede ser muy útil para manejarpequeños motores de tres fases cuando solo hay presente una sola fase.
User Password (Clave de Usuario): Este parámetro permite la entrada de la clave del operador.Cuando la seguridad del sistema ha sido activada, el operador debe entrar la clave correcta en estelugar antes de permitírsele modificar cualquier parámetro. Lea la sección de SISTEMA DESEGURIDAD para más información sobre trabajo con claves de seguridad.
Scty Jmp Status (Estado del Security Jumper) Indica si el servicio técnico ha instalado el puentede acceso. Instalando este puente se permite el acceso al setup del controlador sin claves deseguridad.
ARRANQUES (STARTS)
El menú GCS DRIVE STARTS se accede desde la pantalla del menú GCS SETUP 1 o 2presionando la tecla de flecha derecha o izquierda
Int Auto Rstrt (Rearranques Automáticos Internos): Reinicia automáticamente el motor despuésde una parada (shutdown) y no se bloquea (locked out). Este parámetro es usado en ausencia deun switch externo de HAND-OFF-AUTO (HOA) y es remplazado cuando se ha montado este switch(HOA).

32
Strts Counter (Contador de arranque): Muestra el número de veces que el motor ha sidoautomáticamente reiniciado. Este contador es usado en conjunto con los parámetros MaximumAllowed Starts (Número de arranques permitidos) y Starts Counter Reset Delay (Contador dearranques) para limitar y controlar el número de veces que el controlador reinicia el motor antes deasumir una condición de bloqueo (lockout) y prevenir intentos de arranque adicionales. Unacondición de bloqueo (lockout) puede ser borrada presionando la tecla STOP o moviendo el switchHOA a OFF y volviéndolo a AUTO o HAND.
Total Starts (Arranques Totales): Graba el número de veces que el controlador y el motor hansido reiniciados desde la última vez que se ha reseteado el controlador a los comandospredefinidos en fabrica.
Max Alowd Strts (Máximos Arranque Permitidos): Controla el número de reinicios automáticosque realizara el controlador antes de generar una condición de bloqueo (lockout). Si el controladorrealiza estos rearranque y el motor no arranca para el tiempo mínimo establecido en el parámetroStarts Counter Reset Delay, el controlador asumirá una condición de bloqueo (lockout) y evitanuevos intentos de arranque hasta que la condición de bloqueo (lockout) sea borrada. Unacondición de bloqueo (lockout) puede ser borrada presionando la tecla STOP o moviendo el switchHOA a OFF y volviéndola a AUTO o HAND. Este parámetro es usado para todos los intentos derearranque a menos que los parámetros de reinicio auxiliares (Auxiliary Restart Parameters) seanactivados para una razón de apagado (Shutdown) especifica.

33
Strts Cntr Rst (Reset de Control de Rearranque): Controla el tiempo en minutos que elcontrolador y el motor deben funcionar antes de que el controlador cuente el número automático dearranques y permita que ocurran los rearanques. Cuando este tiempo se acaba y el contadorSTARTS COUNTER se resetea a cero, el controlador puede nuevamente intentar los rearanquesautomáticos permitidos por el parámetro MAX ALOWD STRTS. Por ejemplo, si el motor ha sidoencendido y ha sido apagado antes de transcurridos los 60 minutos programados en el parámetro,el controlador grabara 1 arranque automático. Si el motor es encendido nuevamente y se apagaantes de 60 minutos de funcionamiento, el controlador mostrara 2 intentos de arranqueautomáticos. Si esta situación es repetida una vez más, el controlador grabara el tercer arranqueautomático y generara una condición de bloqueo (lockout). Esta condición de bloqueo (lockout)prevendrá cualquier arranque hasta que la condición de bloqueo (lockout) sea borrada. Estetiempo es también usado por el parámetro siguiente Progressive Restart Time.
Prog Rstrt Tm (Temporizadores de Rearranque Progresivos): Da un método para incrementarautomáticamente la cantidad de tiempo de reinicio que el controlador espera antes de rearrancar elmotor. Cuando este parámetro es fijado a un valor diferente de cero, este número de minutos seráadicionado al tiempo de espera usado para el rearranque automático. En este caso, el controladorusara el tiempo de espera estándar para el primer arranque y después se sumara progresivamenteel tiempo de espera configurado en este parámetro al segundo arranque. Para prevenir un tiempode incremento grande, la cantidad de este tiempo volverá a cero cuando el tiempo defuncionamiento del motor ha excedido el parámetro anterior Strts Cntr Rst.
Restart Delay (Tiempo de Retraso de Rearranque) Fija la cantidad de tiempo en minutos que elcontrolador esperara después de un apagado (shutdown) antes de comenzar con el rearranqueautomático del motor. Si es necesario el motor puede ser arrancado inmediatamente presionandoel botón START o el switch de start montado en el panel (si el panel esta equipado con este). Entodos los casos, el controlador rearrancará la bomba sólo si no hay alarmas activas y el parámetroWait For Restart Timer es desactivado. Restart Delay puede ser afectado automáticamente por elanterior parámetro Progressive Restart Time Delay. Si el parámetro Auxiliary Restarts (Rearranqueauxiliar) es activado para la última causa de apagado (shutdown), el controlador usara estosparámetros específicos para Time Delay (tiempo de espera) y Number Start Attemps (número deintentos de arranque).
Tm Til Rstrt (Temporizador mientras Arranca): Muestra el número de minutos y segundostranscurridos antes de que el controlador rearranque el motor. Si este parámetro muestra cero y elcontrolador no esta funcionando, puede haber alarmas activas, el rearranque es impedido porhaber presionado la tecla STOP, el switch externo HOA esta en la posición HAND u OFF, uncomando de parada (shutdown) telemétrico esta activo o el parámetro Int Auto Rstrt es fijado en“NO”.
Stagrd Strt Tm (Promedia de Temporizador de arranque): Da un promedio para fijar un tiempode espera de rearranque único para cada controlador. Compensando tiempos individuales dearranque de esta manera se puede ayudar a prevenir la caída de voltaje en el sistema de potenciacausado cuando muchos motores arrancan a la vez.
Wait Fr Rstrt T (Esperar un Rearranque): Fuerza el controlador a esperar hasta que el tiempo derearranque expire antes de permitir algún tipo de rearranque manual o automático. Pararearrancarlo inmediatamente en caso de emergencia, cambie esta opción a “NO” y despuésarranque el controlador. Este seguro de volver a fijar esta opción a “YES” si el rearranque debe serimpedido durante el tiempo de demora de rearranque. El controlador nunca intentara rearrancar elmotor si hay alarmas activas.
Rstrt On Ovld (Rearranque Auxiliar de Sobrecarga): Programa los parámetros de OverloadAuxiliary Restart Parameters (ARPs) para permitir al controlador un rearranque automático del
34
motor después de una apagado (shutdown) por sobrecarga. Todos los parámetros (ARPs) seacceden desde cada pantalla de configuración de fallas y alarmas. Vaya a la sección de fallas yalarmas de este manual para detalles.

35
HISTORIA Y REGISTRO DE DATOSEl grupo de menús de historia y el registro de datos (DATALOG y HISTORY), proporciona acceso ala historia guardada dentro del Electrospeed GCS. Este grupo de pantallazos incluye SHUTDOWNHISTORY, EVENT RECORDS, RUN HISTORY, PC CARD DATA LOGGING ANDGRAPHING.
HISTORIA DE SHUTDOWN
Muestra la historia de los shutdown, la causa, la hora y fecha de las ultimas noventa y nueveshutdowns. La pantalla puede mostrar once registros, para revisar los demás, oprima la flechaabajo para mover el cursor al final de la pantalla, así desplazándose a través de todos los registros.Los nombre de las causas del shutdown son frecuentemente abreviados, así que si una explicaciónes requerida, en el final de pantalla muestra el nombre de la falla de interés.
DETALLES DE SHUTDOWN
La pantalla de Shutdown Detail es mostrada cuando se oprime ENTER mientras el cursor iluminael registro del shutdown history. Este registro contiene el valor de lectura de las tres corrientes yvoltajes y de dos entradas análogas en el momento de que el shutdown ocurrió. Estos datospueden ser útiles para diagnosticar problemas relacionados con el shutdown.

36
REGISTROS DE EVETOS
La pantalla de registros de eventos muestra los últimos 254 eventos que han ocurrido desde que elcontrolador ha sido instalado y puesto en marcha. Cuando el buffer de eventos se llena, elcontrolador comenzara a sobrescribir los registros mas viejos con la información mas reciente.Cada evento entra a la lista numerado y esta seguido por tres letras que indican abreviado el tipode evento, seguido por la descripción de los datos que causaron o estuvieron afectados por elevento. Al final de la pantalla, tres líneas de información explican el tipo de evento (no-abreviado),el momento y fecha de ocurrencia y el cambio de configuración, los valores de antes y después delcambio. Use las flechas arriba/abajo para mover el cursor hacia arriba o abajo y examinar lainformación en la pantalla. Para mover rápidamente el cursor desde el final de una lista hasta elfinal de otra oprima la tecla ENTER.
RUN HISTORY
La pantalla de historia de trabajo, muestra los contadores y temporizadores de la operación acercade la instalación. Para tener acceso, presione la tecla derecha en la pantalla de EVENTRECORDS.
Run Time (días) este contador graba el total de veces que el motor ha arrancado en los últimosdías desde la ultima vez que fue encendido.
Run Time Este contador graba las horas, minutos y segundos (HMS) que el motor ha corridodesde la ultima puesta en marcha. Cuando este timer alcanza las 24 horas, volverá a comenzardesde cero y el Run Time (días) se incrementara en un día.
Rstbl Run Time (días) Este temporizador reseteable funciona grabando el numero de días en loscuales el motor ha estado funcionando desde la ultima configuración del usuario.
Rstbl Run Tm Este temporizador (Resettable Run Timer) graba el numero de hora minutos ysegundos (HMS) que el motor ha estado funcionando desde la ultima vez que ha sido configuradopor el usuario. Cuando este temporizador alcanza el valor de 24, se pondrá en cero y el valor deRstbl Run Time (días) se incrementara de uno en uno.

37
Reset Run Time Utilice esta opción para restaurar Rstbl Run a cero. Mueva el cursor hasta queesta opción se ilumine, presione ENTER. Los dos contadores reseteables se restauraran a cero, ysi el motor esta corriendo, inmediatamente comienza a acumular run time.
Ttl Run Time Total Run Time (días) graba el total de días que el motor ha corrido desde que fueinstalado por primera vez y configurado.
Ttl Run Time Este contador graba en horas, minutos y segundos (HMS) desde que el motor fueinstalado por primera vez y configurado. Cuando este contador alcanza el valor de 24 h, el Ttl RunTime (días) se incrementara de uno en uno.
Down Tm Down Time (días) graba el total de números de días que el motor ha estado apagadodesde la ultima vez que entro en shutdown.
Down Tm Down Time graba las horas, minutos y segundos (HMS) que el motor ha estadoapagado desde el ultimo shutdown. Cuando este valor alcanza 24, vuelve a cero, y el down time endías se va incrementando de uno en uno.
Ttl Dn Tm Total Down Time (días) graba y acumula el total de días que el motor ha estadoapagado desde que fue instalado y encendido por primera vez.
Ttl Dn Tm El Total Down Time graba y acumula las horas, minutos y segundos (HMS) que el motorno ha estado en funcionamiento, desde que fue encendido y instalado por primera vez. Cuandoeste contador alcanza el valor de 24, se restablece a cero y el Ttl Dn Tm (días) se vaincrementando de uno en uno.
Strts Cntr (Contadores de arranque): Starts Counter muestra las veces que hubo rearranquesautomáticos, durante los cuales el motor duro encendido hasta que el Starts Counter Reset delayse hubiera terminado. Si estos arranques alcanzan un valor configurado en (Máximos ArranquePermitidos) Max Alowd Strts, el controlador entrara en una condición de lockout y no permitirá masintentos de arranques hasta que la condición de lockout halla sido borrada. Este parámetro seaccede en el menú de Electrospeed GCS SETUP y es manipulado por el operador según suconveniencia.
Strts Cntr Rst (Contadores reseteables de arranque): Starts Counter Reset delay controla lacantidad de tiempo en minutos, que el motor debe correr antes de que el contador automático dearranque se restablezca en cero. Cuando este tiempo ha terminado y STARTS COUNTER serestablece a cero, el controlador puede intentar rearranques automáticos que se hallan configuradoen el parámetro Max Alowd Strts (Máximos arranques permitidos). Esta configuración se accede enel menú de ESPEED GCS SETUP y es cambiada o instalada solo para la conveniencia deloperador.
REGISTRO DE DATOS DE TARJETA DE COMPUTADOR (PC CARD)
Esta pantalla proporciona el acceso a las funciones registro de datos ofrecido por el controladorGCS. El área grabada es almacenada dentro de una tarjeta de memoria lenta insertada dentro dela unidad de display del GCS. Las tarjetas de memoria son formateadas y estructuradas bajoformato de archivo DOS. Cuando se introduce dentro de los slot del PC, la tarjeta de memoria, latarjeta debe aparecer como un drive y los registros deben aparecer como un archivo de formatoDOS. Para usar, ver o manipular esta data, el usuario puede abrir el archivo utilizando MS Excel,MS Word o cualquier otro software que pueda importar los datos de forma “separar variables concoma” o tipo archivo “CSV”. Para mas información con respecto a la utilización de la tarjeta de

38
memoria, consulte el Anexo K al final del manual. En el grafico siguiente, las partes de STATUS ySIZE (condición y tamaño) de la pantalla contienen información de una correcta tarjeta de memoria.
Registro de datos Habilitar/desabilitar: Use este menú para parar o arrancar las funciones deregistro de datos. Mueva el cursor sobre el ítem y oprima la tecla ENTER para mover de Enable aDisable y viceversa. Si el ítem esta configurado Enable Datalogging, el controlador GCScomenzara a registrar los datos de registros como están configurados dentro del menú siguiente,Setup Datalogging. Leer la siguiente sección para instrucciones sobre como configurar el registrode datos.
Configuración de registro de datos: Mueva el cursor hasta el Setup Datalogging y presioneENTER. El controlador GCS entonces mostrara un pantallazo similar al que se encuentra en laparte inferior. Este pantallazo se usa para configurar las opciones de registro de datos. Después deque la configuración es completada, es almacenada dentro de la memoria e incluso ante unaeventualidad de una falla de potencia será retenida. Cuando sucede una falla de potencia, el GCSse reconfigurara el mismo utilizando la configuración almacenada.

39
CONFIGURACION DEL REGISTRO DE DATOS
Esta pantalla da al usuario la capacidad de que se pueda configurar el tipo, y la frecuencia con loscuales los datos van a ser registrados. Mas de 12 variables de datos pueden ser registrados afrecuencias mayores de 1 Hz. Cada una de estas variables de datos registrados requiere que elusuario ingrese un point identification (PID), un tiempo de arranque y un intervalo de tiemporegistrado. Una vez la configuración de registro de datos esta completa oprima la tecla MENU parasalir.
Descripción: Mueva el cursor hasta que se ilumine una de las filas (1 a la 12) en esta fila oprimaENTER. El cursor en ese punto invertirá el color con la flechas UP/DOWN se podrá desplazar en lalista de los registros de datos. Desplace la lista hasta el punto deseado y oprima ENTER de nuevo.El dato seleccionado entonces se registra.
Strt (Start Time): La variable de Start Time retrazara el arranque de registro de datos en el numerode segundo introducidos. NOTA: esta función no esta disponible todavía.
Itvl (Interval Time): Mueva el cursor hasta la columna de Interval Time y oprima ENTER paraconfigurar el tiempo entre las muestras registradas. Este control de setpoint controla bajo queintervalo de tiempo la data va a ser registrada. El intervalo mas corto posible es de 1 segundomientras que el máximo es 9000 segundos (2.5 horas).
Enable: Este punto habilita o dehabilita el Electrospeed para grabar el registro de datosrelacionado con el campo. En este punto muestra si tiene una marca de control %, la data serágrabada, si muestra una X, la data no será registrada. Mueva el cursor a esta variable y presioneENTER entonces presione los botones UP o DOWN para varias el valor entre habilitado odesabilitado (enabled o dessabled).
Otras funciones de la tarjeta PC: Esta selección en el menú da acceso a cualquier otra funciónde la PC Card que están corrientemente disponibles. Mueva el cursor hasta este ítem del menú,presione ENTER y un similar menú a la ilustración aparecerá.
GUARDAR DATOS A LA PC CARD
Este grupo de funciones permite al usuario copiar la historia interna de los registros a la PCmemory card. La mayoría de las tarjetas PCMCIA son validas en el computador pueden reconocer

40
esta tarjeta y la información contenida en ella. Todos los archivos son escritos en la PC card enformato de variable separados por coma (*.csv). Para mas información leer el uso de la PC card,consulte el Anexo K al final de este manual.
Historia de Shutdown: Esta función copiara la historia interna de shutdown desde el ElectrospeedGCS a la PC card.
Historia de Eventos: Esta función copiara la historia interna de eventos desde el ElectrospeedGCS a la PC card.
Carta de Amperaje Fase B: Esta función copiará los datos de la carta de amperaje Fase B delElectrospeed GCS a la PC card.
GRAFICAR
El grupo de menú de GRAPHING agrupa las funciones disponibles para graficar.
Carta Amperimétrica Fase B Esta grafica de tiempo versus corriente tiene el mismo propósito dela carta amperimétrica circular mas comúnmente conocida y usada en aplicaciones de control demotores. Las lecturas de corriente del motor de la fase B del Electrospeed GCS graba por unperiodo mayor a cuatro minutos. Después de este periodo, el máximo, el mínimo y promedio valorson grabados para usarse en las graficas. El controlador graba estos datos siempre y cuando elmotor este encendido y funcionando. Cuando se cumplen siete días de datos esta función
41
comenzara a sobrescribir los datos mas antiguos con los actuales. De esta forma, el controladorsiempre retendrá los datos actualizados de los últimos siete días. Este registro de datos se puedemanipular en un computador portátil para análisis en aplicaciones comúnmente usadas como MSExcel y Lotus 123.
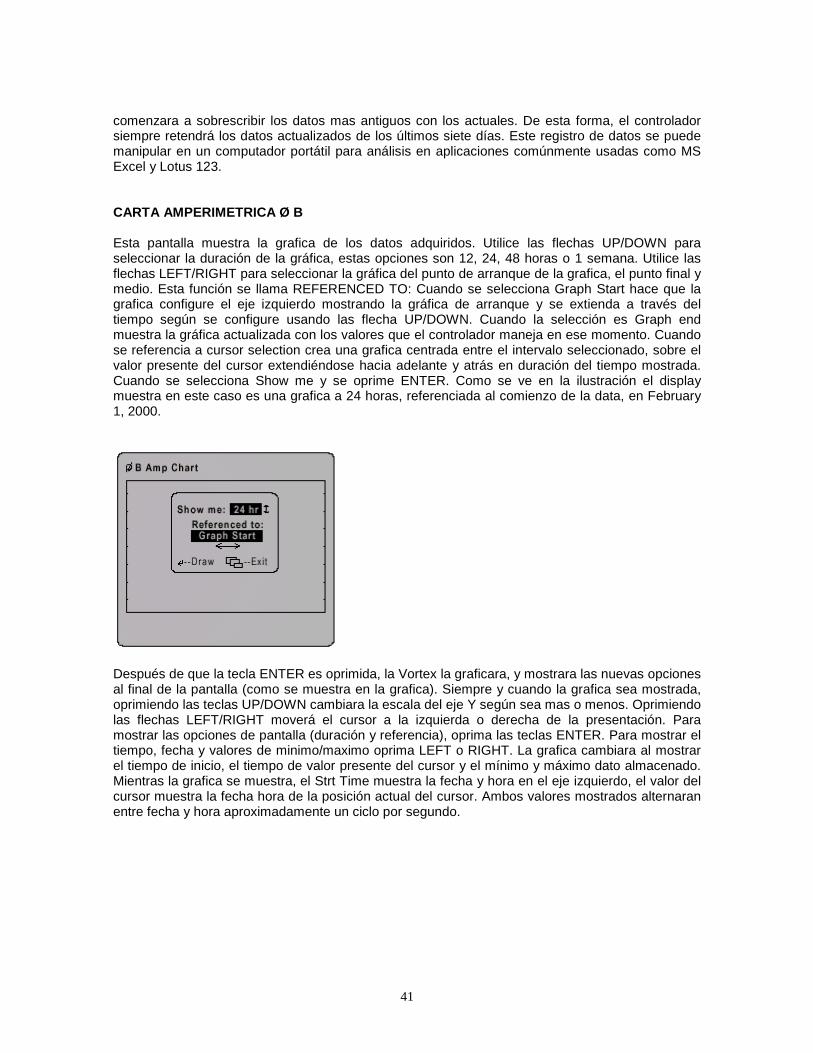
CARTA AMPERIMETRICA Ø B
Esta pantalla muestra la grafica de los datos adquiridos. Utilice las flechas UP/DOWN paraseleccionar la duración de la gráfica, estas opciones son 12, 24, 48 horas o 1 semana. Utilice lasflechas LEFT/RIGHT para seleccionar la gráfica del punto de arranque de la grafica, el punto final ymedio. Esta función se llama REFERENCED TO: Cuando se selecciona Graph Start hace que lagrafica configure el eje izquierdo mostrando la gráfica de arranque y se extienda a través deltiempo según se configure usando las flecha UP/DOWN. Cuando la selección es Graph endmuestra la gráfica actualizada con los valores que el controlador maneja en ese momento. Cuandose referencia a cursor selection crea una grafica centrada entre el intervalo seleccionado, sobre elvalor presente del cursor extendiéndose hacia adelante y atrás en duración del tiempo mostrada.Cuando se selecciona Show me y se oprime ENTER. Como se ve en la ilustración el displaymuestra en este caso es una grafica a 24 horas, referenciada al comienzo de la data, en February1, 2000.
Después de que la tecla ENTER es oprimida, la Vortex la graficara, y mostrara las nuevas opcionesal final de la pantalla (como se muestra en la grafica). Siempre y cuando la grafica sea mostrada,oprimiendo las teclas UP/DOWN cambiara la escala del eje Y según sea mas o menos. Oprimiendolas flechas LEFT/RIGHT moverá el cursor a la izquierda o derecha de la presentación. Paramostrar las opciones de pantalla (duración y referencia), oprima las teclas ENTER. Para mostrar eltiempo, fecha y valores de minimo/maximo oprima LEFT o RIGHT. La grafica cambiara al mostrarel tiempo de inicio, el tiempo de valor presente del cursor y el mínimo y máximo dato almacenado.Mientras la grafica se muestra, el Strt Time muestra la fecha y hora en el eje izquierdo, el valor delcursor muestra la fecha hora de la posición actual del cursor. Ambos valores mostrados alternaranentre fecha y hora aproximadamente un ciclo por segundo.

42
Si se desea, los datos recolectados para crear una grafica pueden ser transferidos al PC por mediode la memory card. El comando para copiar los datos a la memory card esta en el menú:DATALOG /OTHER PC CARD FUNCTIONS /PHASE B AMPCHARTLos datos serán escritos en el disco duro del PC como un archivo de tipo DOS llamado:AMPCHART.CSV

43
FAULTS & UNDLDEl grupo de menús de FAULTS y UNDLD proporciona el acceso a la protección de motorcaracterístico dentro del Electrospeed GCS. Este grupo de menú incluye una pantalla para cadacondición de alarma proporcionando al usuario completo control sobre la respuesta del controladordel motor a alarmas existentes. La primera pantalla muestra después de presionar ENTER a laselección del menú principal OVERLOAD.
OVERLOAD (Sobrecarga)
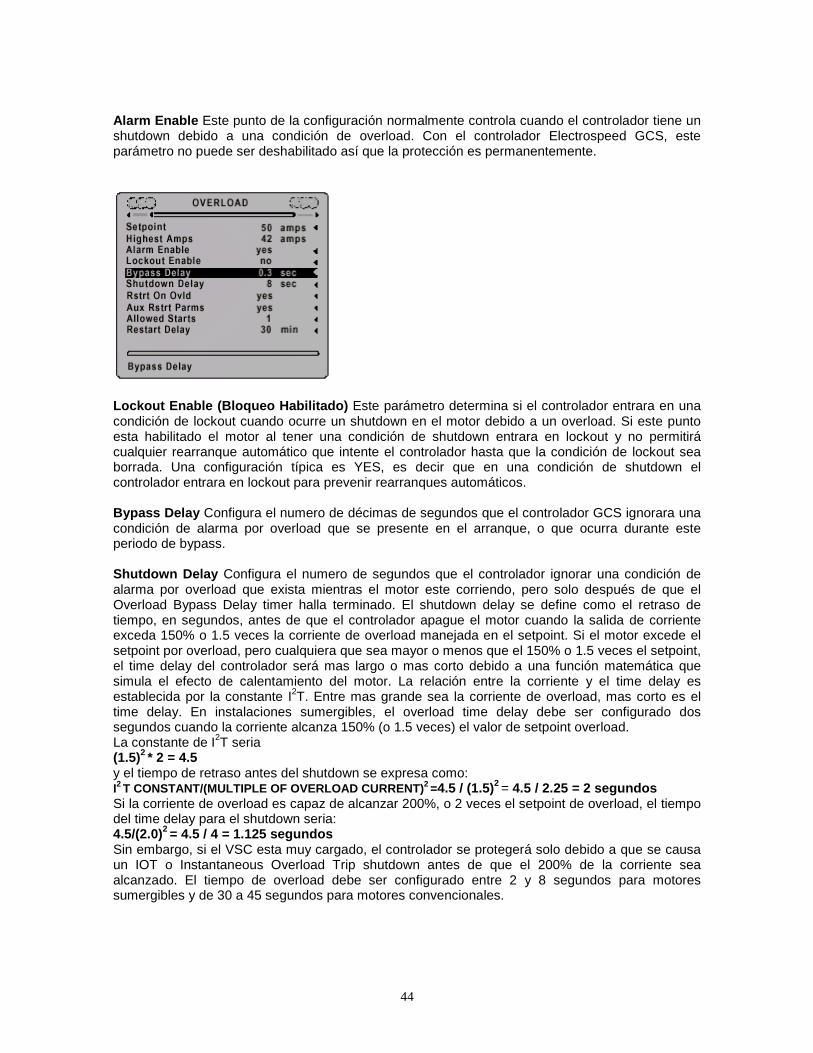
Esta pantalla agrupa los parámetros concernientes a la protección por OVERLOAD. Las alarmasde Overload protegen al motor de excesivos salidas de corriente.
Setpoint La configuración del overload determina la máxima salida de corriente que puedemanejar el motor sin hacerle daño y producir un shutdown. El controlador utiliza la mayor de lastres corrientes de las fases para calcular la magnitud del overload. La configuración usual para unsetpoint de overload es de 0 a 20% mayor que la corriente nominal a carga plena, o corrientenominal del motor multiplicado por la relación de transformación (voltaje entrada / voltaje salida)cuando un transformador es conectado entre el controlador y el motor. Ambos, overload setpoint yel overload shutdown time delay deben ser configurados, lo menor posible practico para laaplicación.
Highest Amps ø Este parámetro muestra la mayor salida de corriente por cualquiera de las tresfases (la mayor). La condición de overload es calculada sobre la mayor corriente de las tres fases.Este punto no es ajustable.
44
Alarm Enable Este punto de la configuración normalmente controla cuando el controlador tiene unshutdown debido a una condición de overload. Con el controlador Electrospeed GCS, esteparámetro no puede ser deshabilitado así que la protección es permanentemente.
Lockout Enable (Bloqueo Habilitado) Este parámetro determina si el controlador entrara en unacondición de lockout cuando ocurre un shutdown en el motor debido a un overload. Si este puntoesta habilitado el motor al tener una condición de shutdown entrara en lockout y no permitirácualquier rearranque automático que intente el controlador hasta que la condición de lockout seaborrada. Una configuración típica es YES, es decir que en una condición de shutdown elcontrolador entrara en lockout para prevenir rearranques automáticos.
Bypass Delay Configura el numero de décimas de segundos que el controlador GCS ignorara unacondición de alarma por overload que se presente en el arranque, o que ocurra durante esteperiodo de bypass.
Shutdown Delay Configura el numero de segundos que el controlador ignorar una condición dealarma por overload que exista mientras el motor este corriendo, pero solo después de que elOverload Bypass Delay timer halla terminado. El shutdown delay se define como el retraso detiempo, en segundos, antes de que el controlador apague el motor cuando la salida de corrienteexceda 150% o 1.5 veces la corriente de overload manejada en el setpoint. Si el motor excede elsetpoint por overload, pero cualquiera que sea mayor o menos que el 150% o 1.5 veces el setpoint,el time delay del controlador será mas largo o mas corto debido a una función matemática quesimula el efecto de calentamiento del motor. La relación entre la corriente y el time delay esestablecida por la constante I2T. Entre mas grande sea la corriente de overload, mas corto es eltime delay. En instalaciones sumergibles, el overload time delay debe ser configurado dossegundos cuando la corriente alcanza 150% (o 1.5 veces) el valor de setpoint overload.La constante de I2T seria(1.5)2
* 2 = 4.5y el tiempo de retraso antes del shutdown se expresa como:I2 T CONSTANT/(MULTIPLE OF OVERLOAD CURRENT)2
=4.5 / (1.5)2 = 4.5 / 2.25 = 2 segundos
Si la corriente de overload es capaz de alcanzar 200%, o 2 veces el setpoint de overload, el tiempodel time delay para el shutdown seria:4.5/(2.0)2
= 4.5 / 4 = 1.125 segundosSin embargo, si el VSC esta muy cargado, el controlador se protegerá solo debido a que se causaun IOT o Instantaneous Overload Trip shutdown antes de que el 200% de la corriente seaalcanzado. El tiempo de overload debe ser configurado entre 2 y 8 segundos para motoressumergibles y de 30 a 45 segundos para motores convencionales.
45
Rstrt on Ovld (Rearranque por Sobrecarga) El Overload Auxiliary Restart Parameters (ARPs)permite al controlador un intento de rearranque automático del motor después de un shutdown porOverload. Todos los parámetros de rearranques auxiliares son posibles para cada una de lasalarmas de fallas y alarmas en la pantalla de configuración. Sin embargo, en el caso de Overload,cuando Rstrt on Ovld esta configurado en YES, el ARP para Overload esta activado, losrearranques serán solamente uno. La ilustración muestra la configuración de los ARP cuando esteparámetro esta activo.
Aux Rstrt Parms (Parametros de Rearranques Auxiliares) Cuando se programa en YES, fuerzaal controlador usar los parámetros de rearranque automáticos listados abajo que son Allowed Starty Restart Delay; cuando hay un shutdown por una alarma por overload. Si este parámetro esta enNO, el controlador usara los parámetros de rearranques globales para desarrollar un rearranqueautomático. El rearranque global esta configurado en menú del Electrospeed GCS setup.
Allowed Starts (Arranques Permitidos): Controla cuantos rearranques automáticos sonpermitidos cuando el controlador entra en shutdown debido a un Overload y el Aux Rstrt Parms hasido configurado YES.
Restart Delay (Tiempo de Rearranque): Controla la cantidad de tiempo que el controladoresperara antes de intentar un rearranque automático del motor cuando estaba en shutdown debidoa un overload y los parámetro de rearranques auxiliares (Aux Rstrt Parms) han sido seteados enYES.
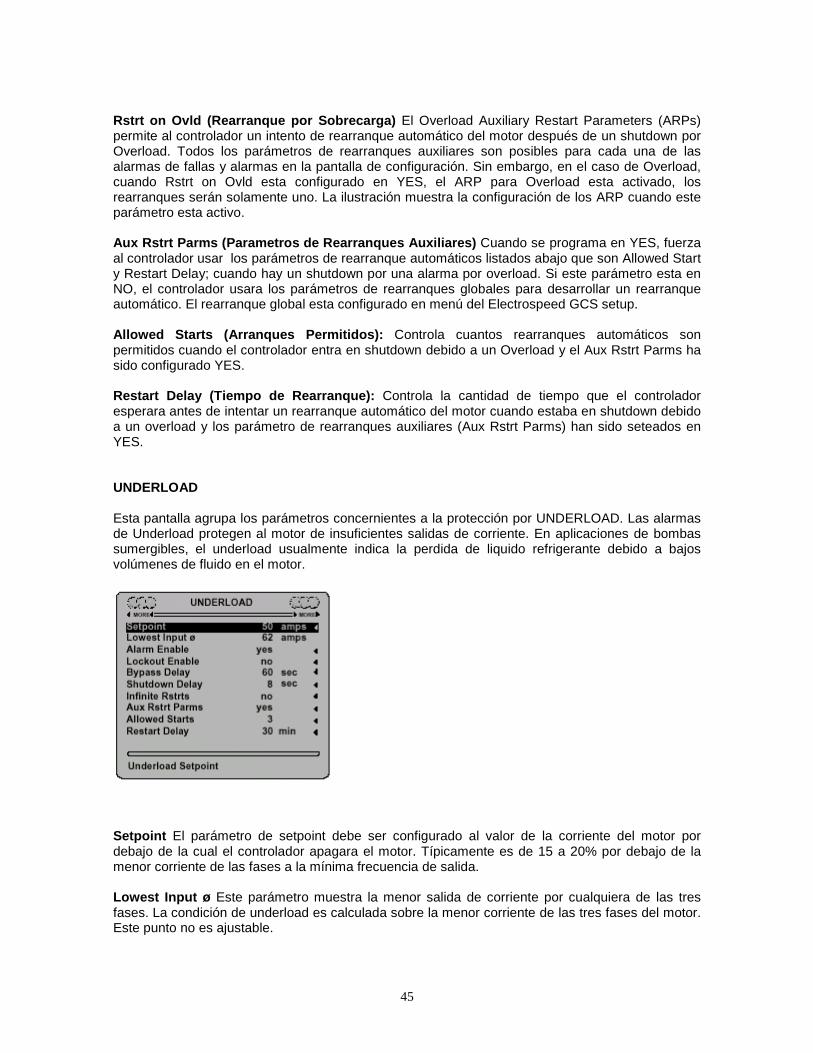
UNDERLOAD
Esta pantalla agrupa los parámetros concernientes a la protección por UNDERLOAD. Las alarmasde Underload protegen al motor de insuficientes salidas de corriente. En aplicaciones de bombassumergibles, el underload usualmente indica la perdida de liquido refrigerante debido a bajosvolúmenes de fluido en el motor.
Setpoint El parámetro de setpoint debe ser configurado al valor de la corriente del motor pordebajo de la cual el controlador apagara el motor. Típicamente es de 15 a 20% por debajo de lamenor corriente de las fases a la mínima frecuencia de salida.
Lowest Input ø Este parámetro muestra la menor salida de corriente por cualquiera de las tresfases. La condición de underload es calculada sobre la menor corriente de las tres fases del motor.Este punto no es ajustable.

46
Alarm Enable (Alarma Habilitada): Este punto de la configuración controla cuando el controladorapaga o no apagara el motor debido a una condición de underload. Normalmente se configura enYES, entonces la protección por underload esta habilitada.
Lockout Enable (Bloquear Alarma): Este parámetro determina si el controlador entrara en unacondición de lockout cuando ocurre un shutdown en el motor debido a un underload. Si este puntoesta habilitado el motor al tener una condición de shutdown entrara en lockout y no permitirácualquier rearranque automático que intente el controlador hasta que la condición de lockout seaborrada. Una configuración típica es NO, en una condición de shutdown el controlador no entraraen lockout para evitar rearranques automáticos.
Bypass Delay Configura el numero de segundos que el controlador GCS ignorara una condiciónde alarma por underload que se presente en el arranque, o que ocurra durante este periodo debypass. Normalmente es 60 segundos
Shutdown Delay Configura el numero de segundos que el controlador ignorara una condición dealarma por underload que exista cuando el motor este corriendo, pero solo después de que elUnderload Bypass Delay timer halla terminado. Normalmente se configura a 8 segundos.
Infinite Rstrts Infinite Restarts, si se configura en YES, causara que el controlador permita infinitosnumero de shutdown por underload y rearranques. El Electrospeed GCS normalmente usara elbloqueo habilitado de Underload (Lockout Enable) o el parámetro de Maximum Allowed Restartspara bloquear y no permitir excesivos rearranque automáticos, y así proteger el motor de losrepetitivos intentos. Existen situaciones, que requieren que este parámetro este habilitado pararearrancar la bomba un indefinido numero de veces cuando la causa de shutdown es unUnderload. Típicamente se configura en NO.
Aux Rstrt Parms Los parámetros de Auxiliary Restart, cuando se configura en YES, fuerza alcontrolador Electrospeed usar los parámetro de rearranque automático listados abajo (Allowed starty Restart Delay) cuando el shutdown es debido a una alarma por UNDERLOAD. Si este parámetroesta configurado en NO, el controlador usara el parámetro global de rearranque cuando vaya aintentar un rearranque automático. El parámetro de rearranque global es configurado del menú deElectrospeed GCS setup.
Allowed Starts Allowed starts controla cuantos rearranques automáticos son permitidos cuando elcontrolador entra en shutdown debido a un underload y el Aux Rstrt Parms ha sido seteado enYES.

47
Restart Delay Restart Delay controla la cantidad de tiempo que el controlador esperara antes deintentar un rearranque automático del motor cuando el GCS se encuentre en shutdown debido a ununderload y los parámetro de rearranques auxiliares (Aux Rstrt Parms) han sido seteados en YES.
INPUT OVRVLT
Esta pantalla agrupa los parámetros concernientes a la protección del motor por entrada de sobrevoltaje. La alarma de sobre voltaje protege el Electrospeed GCS de las tensiones que resultan dela excesiva entrada de voltaje y proporciona una indicación para el operador para hallar problemasexistentes en el suministro de energía.
Setpoint El parámetro de Input Over Voltage debe ser configurado al valor de la entrad de voltajesobre el cual el controlador apagara el motor. Una configuración típica es de 5% por encima devalor nominal del controlador.
Highest Vlts ø Este parámetro muestra la mayor entrada de voltaje en las fases. La condición dealarma de sobre voltaje (over voltage) es calculada bajo este valor. Este punto no es ajustable porel usuario.
Alarm Enable Este parámetro controla si el controlador entrara en shutdown cuando halla unsobrevoltaje o seguirá funcionando y lo ignorara.
Lockout Enable Este parámetro determina si el controlador entrara en condición de lockoutcuando este ha apagado el motor por sobrevoltaje. Si este punto esta habilitado y el motor esta enshutdown debido a un OverVoltage, el controlador entrara en lockout y prevendrá cualquier intentode rearranque automático hasta que la condición de lockout halla sido borrada. Típicamente laconfiguración de este parámetro es NO, es decir que no se bloquea el controlador para intentarrearranques automáticos en un shutdown.
Bypass Delay Configura el numero de segundos que el controlador GCS ignorara una condiciónde alarma por Over Voltage que se presente al arrancar, o que ocurra durante el periodo debypass. Normalmente se configura en 4 segundos.
Shutdown Delay Configura el numero de segundos que el controlador ignorara una condición dealarma por Over Voltage que ocurra mientras el motor este corriendo, pero solo después de que elOver Voltage Bypass Delay timer halla terminado. Normalmente se configura a 4 segundos.

48
Aux Rstrt Parms Auxiliary Restart Parameters, cuando se configura a YES, fuerza al controladorElectrospeed usar los parámetro de rearranque listados abajo (Allowed start y Restart Delay),cuando este entra en shutdown debido a una alarma por Over Voltage. Si este parámetro esconfigurado en NO, el controlador usara el parámetro de rearranque global cuando intente unrearranque automático. El parámetro de restart parameters son configurados del menú deElectrospeed GCS setup.
Allowed Starts Allowed Starts controla cuantos rearranques automáticos serán permitidos cuandoel controlador este en shutdown debido a un Over Voltage y el Aux Rstrt Parms ha sido configuradoen YES.
Restart Delay Restart Delay controla la cantidad de tiempo que el controlador esperara antes deintentar un rearranque del motor cuando ha estado en shutdown debido a un Over Voltage y elparámetro de Aux Rstrt Parms ha sido establecido en YES.
INPUT UNDVLT
Esta pantalla agrupa los parámetros concernientes a la protección por Input Under Voltage. Estaalarma ayuda a detectar y enunciar problemas relacionados con el suministro de energía.
Setpoint El parámetro de Under Voltage debe ser configurado al valor de voltaje de entrada pordebajo del cual el controlador apagara el motor. Típicamente es 20% por debajo del voltaje nominaldel controlador.
Lowest Vlts ø Este parámetro muestra el valor del menor voltaje en las fases de alimentación. Lacondición de alarma por Under Voltage es calculada sobre este menor valor. Este punto no esajustable por el usuario.
Alarm Enable Este parametro controla si ante una alarma de Under Voltage, el controlador apagael motor, o ignora la alarma.
Lockout Enable Este parámetro determina si el controlador entrara en una condición de lockoutcuando esta en shutdown debido a un Under Voltage. Si este punto esta habilitado el controladorse bloqueara y prevendrá cualquier intento de rearranque automático hasta que la condición delockout halla sido borrada. Normalmente se configura NO, es decir no bloquear los rearranquesautomáticos ante un shutdown.

49
Bypass Delay Configura el numero de segundos que el controlador GCS ignorara una condiciónde alarma Under Voltage que se presente ante el arranque, o ocurra durante este periodo debypass. Típicamente se configura a 0 segundos.
Shutdown Delay Configura el numero de segundos que el controlador ignorara una condición dealarma de Under Voltage que exista mientras el motor esta corriendo, pero solo después de que elUnder Voltage Bypass Delay timer halla terminado. Típicamente se configura a 4 segundos. Estetime delay puede ser configurado mas corto por una función matemática que simula el efecto decalentamiento de motor y se establece por la constante T/V2. Entre mas bajo sea la entrada devoltaje, mas corto será el time delay. En una instalación típica sumergible el under voltage timedelay debe ser configurado durante 4 segundos cuando el voltaje cae por debajo del setpoint (1vez por debajo del under voltage setpoint). Desde que el undervoltage setpoint equivalga a 1 veznivel de undervoltage, la constante T/V2
seria 4/(1)2 = 4. El time delay antes del shutdown será
entonces será:(T/V2
CONSTANT) / ((multiple of undervoltage setpoint)2 )
o 4/12 = 4 segundos.
Si el under voltage alcanzo 200%, o 2 veces el Under Voltage setpoint, el time delay para elshutdown seria4/(2.0)2
= 4/4 o 1.00 segundo.El tiempo de under voltage es típicamente configurado entre dos y ocho segundos paraaplicaciones de motores sumergibles, y de entre 30 a 45 segundos para motores convencionales.
Aux Rstrt Parms Auxiliary Restart Parameters, cuando esta configurado a YES, fuerza elcontrolador Electrospeed usar los parámetro de rearranque listados abajo (Allowed start y RestartDelay), cuando hay un shut down debido a una alarma de Under Voltage. Si el parámetro estaconfigurado a NO, el controlador usara los parámetros globales de rearranque cuando va a intentarun rearranque automático. El parámetro global de rearranque se configura en el menú deElectrospeed GCS setup.
Allowed Starts Allowed Starts controla cuantos rearranque automáticos serán permitidos cuandoel controlador ha entrado en shutdown debido a un Under Voltage y el Aux Rstrt Parms ha sidoconfigurado en YES.
Restart Delay Restart Delay controla la cantidad de tiempo que el controlador esperara antes deintentar rearrancar el motor cuando ocurre un shutdown debido a un Under Voltage y el Aux RstrtParms ha sido configurado en YES.

50
INPUT VUNBAL
La alarma de Input Voltage Unbalance es utilizada para enunciar problemas con la potencia deentrada. Esta alarma ayuda a detectar y enunciar problemas con el suministro de energía.
Setpoint El parámetro fija el porcentaje del desbalance del voltaje de entrada el cual podría apagarel motor. Una configuración normal es de 4 a 10%.
Present Value Este parámetro muestra el valor del porcentaje presente del desbalance de voltaje.Este porcentaje se define como la máxima desviación de cualquier voltaje de una fase, delpromedio de las tres fases. La condición de alarma de Voltage Unbalance se calcula bajo elporcentaje de desviación. Este punto no es ajustable por el usuario.
Alarm Enable Este parámetro controla si el controlador ante una alarma debido a un VoltageUnbalance entrara en shutdown o ignorara la alarma.
Lockout Enable Este parámetro determina si el controlador entrara en condición de lockoutcuando el motor ha entrado en shutdown debido a un Voltage Unbalance. Si este punto estahabilitado y el motor esta en shutdown, el controlador bloqueara y prevendrá cualquier rearranqueautomático hasta que la condición de lockout halla sido borrada. Una configuración típica es NO, esdecir que no se bloquee el controlador cuando entra en shutdown por voltaje unbalance.
Bypass Delay Configura el número de segundos que el controlador GCS ignorara una condiciónde alarma por Voltage Unbalance que se presente en un arranque, o que ocurra mientras esteperiodo de bypass termine. Una configuración típica es 4 segundos.
Shutdown Delay Configura el numero de segundos que el controlador ignorara una condición dealarma por Voltage Unbalance que exista mientras el motor este funcionando, pero solo despuésde que el Voltage Unbalance Bypass Delay timer halla terminado. Típicamente se configura a 1segundo.
Aux Rstrt Parms Auxiliary Restart Parameters, cuando se configura a YES, fuerza al controladorElectrospeed a usar los parámetro de rearranque listados abajo (Allowed start y Restart Delay),cuando entra en shutdown debido a una alarma de Input Voltage Unbalance. Si este parámetroesta configurado en NO, el controlador usara el parámetro global de rearranque cuando vaya aintentar un rearranque automático. Este parámetro de rearranque automático se encuentra en elmenú del Electrospeed GCS setup.

51
Allowed Starts Allowed Starts controla cuantos rearranques automáticos serán permitidos cuandoel controlador ha tenido un shutdown debido a un Input Voltage Unbalance y Aux Rstrt Parms hansido configurados en YES.
Restart Delay Restart Delay controla la cantidad de tiempo que el controlador esperara antes deintentar rearrancar el motor cuando este se ha apagado debido a Input Voltage Unbalance y AuxRstrt Parms ha sido establecido en YES.
LOW SPEED TRIP
El punto de configuración de Low Speed Trip (LST) protege al motor de operar por debajo de lafrecuencia seleccionada por el usuario, por tiempo mayor que el especificado en el time delay.
Low Speed Clamp Low Speed Clamp controla la menor velocidad a la cual el motor es permitidooperar. Por debajo de esta frecuencia, el controlador comenzara un procesos de shutdown por LowSpeed Trip si esta alarma esta habilitada.
Output Freq La frecuencia de operación, muestra la actual frecuencia de operación delcontrolador. El GCS, en la sección de inverter siempre opera a la mínima frecuencia así el motoreste en un shutdown. Es por esto, que este parámetro mostrara una frecuencia mínima de 3 Hz ala máxima salida que es la de operación del motor. La frecuencia de salida no es ajustable en estepunto de configuración, pero se puede modificar en el menú de GCS SETUP 1.
Alarm Enable La alarma de Low Speed Trip Alarm Enable controla si el controlador causara unshutdown después de tener un low output speed. Una configuración típica es YES, alarma de LSTesta habilitada.
Lockout Enable Low Speed Trip Lockout Enable controla si el controlador entra a una lockoutcuando ha tenido un shutdown debido a una condición de alarma por LST. Si este punto estahabilitado y el motor esta en shutdown debido a Low Speed Trip, el controlador bloquearacualquier intento de rearranque automático hasta que esta condición de lockout halla sido borrada.Una configuración típica es NO, no bloquea bajo shutdown por LST.
Bypass Delay Low Speed Trip Bypass Delay configura el tiempo en segundos, que el controladorGCS ignorará una condición de alarma de Low Speed Trip que se presentara en el arranque o queocurra durante el periodo de bypass. Típicamente esta configuración es la suma del Sync Delaymas el Accel Time delays.

52
Shutdown Delay Low Speed Trip Shutdown Delay configura el numero de segundos que elcontrolador ignorará una condición de alarma de Low Speed Trip que exista mientras el motor estecorriendo, pero solo después de que el Low Speed Trip Bypass Delay timer halla pasado.Típicamente esta configuración es a 10 segundos.
SENSORES DE TEMPERATURA
Este grupo de menú proporciona acceso para los parámetros concernientes a los de sensores detemperatura instalados dentro del Electrospeed GCS. Cada sensor de calor tiene su pantalla deconfiguración que agrupa todos los parámetros relacionados que ese sensor específico. Ilumine elmenú deseado para entrar con el cursor y oprima ENTER para acceder a la pantalla. Note que notodos los sensores son instalados en todos los modelos de controladores. Si no están instalados, laalarma para ese sensor estará deshabilitada desde la fabrica. Si un sensor de temperatura falla,este normalmente mostrara un mensaje de “full-scale” en la línea de lectura por encima de 1000.
HEATSINK 1
Esta pantalla muestra los parámetros pertinentes a los disipadores de calor numero 1.
Raw Este valor representa un valor adimensional para convertir una lectura análoga a digital usadapara medir los sensores de temperatura. Este parámetro no es ajustable por el usuario.
Present Temp este valor indica la lectura de temperatura medida en el Heatsink 1. Este valor noes ajustable.
Over Temp Thld Over Temperature Threshold setpoint indica el valor de la temperatura que elcontrolador permitirá sin causar un shutdown. Este valor no es ajustable por el usuario.
Alarm Enable Alarm Enable setpoint controla si el GCS causara un shutdown debido a lectura deover temp thld del Heatsink 1. Este valor no es ajustable por el usuario.
Lockout Enable Lockout Enable controla si el GCS entrara en una condición de lockout debido aun shutdown por una alarma en el Heatsink 1 por Over Temperature. Si este punto esta habilitado yel motor se apaga debido a Heatsink 1 Over Temperature, el controlador se bloqueara y evitaranuevos intentos de rearranque automático hasta que la condición de lockout sea borrada.Normalmente esta configuración es NO, es decir que no se bloquea bajo un shutdown.

53
Bypass Delay Bypass Delay configura el numero de segundos que el controlador GCS ignore laalarma de Heatsink 1 Over Temperature que se presente en un arranque, o ocurra durante esteperiodo bypass. Este valor no es un valor ajustable por el usuario.
Shutdown Delay Shutdown Delay determina el numero de segundos que el controlador GCSignorará una condición de alarma de Heatsink 1 Over Temperature la cual exista mientras el motoreste corriente, pero solo después de que Heatsink 1 Over Temperature Bypass Delay timer hallaterminado. Normalmente se configura a 10 segundos. Este valor no es un valor ajustable por elusuario.
HEATSINK 2
Esta pantalla muestra los parámetros pertinentes al Heatsink Numero 2. Todos los parámetros sonutilizados con las mismas funciones que en el Heatsink 1. Referirse a la sección del Heatsink 1para mayor explicación de los parámetros. Los valores mostrados en la grafica representan losvalores típicos de esta configuración para este sensor. Con la excepción de Lockout Enable, estosno son ajustables por el usuario.

54
HEATSINK 3
Esta pantalla muestra los parámetros pertinentes al Heatsink Numero 3. Todos los parámetros sonutilizados con las mismas funciones que en el Heatsink 1. Referirse a la sección del Heatsink 1para mayor explicación de los parámetros. Los valores mostrados en la grafica representan losvalores típicos de esta configuración para este sensor. Con la excepción de Lockout Enable, estosno son ajustables por el usuario.
HEATSINK 4
Esta pantalla muestra los parámetros pertinentes al Heatsink Numero 4. Todos los parámetros sonutilizados con las mismas funciones que en el Heatsink 1. Referirse a la sección del Heatsink 1para mayor explicación de los parámetros. Los valores mostrados en la grafica representa losvalores típicos de esta configuración para este sensor. Con la excepción de Lockout Enable, estosno son ajustables por el usuario.
INDUCTOR TEMP
Esta pantalla muestra los parámetros pertinentes al Inductor Temp. Todos los parámetros sonutilizados con las mismas funciones que en el Heatsink 1. Referirse a la sección del Heatsink 1para mayor explicación de los parámetros. Los valores mostrados en la grafica representa losvalores típicos de esta configuración para este sensor. Con la excepción de Lockout Enable, estosno son ajustables por el usuario.
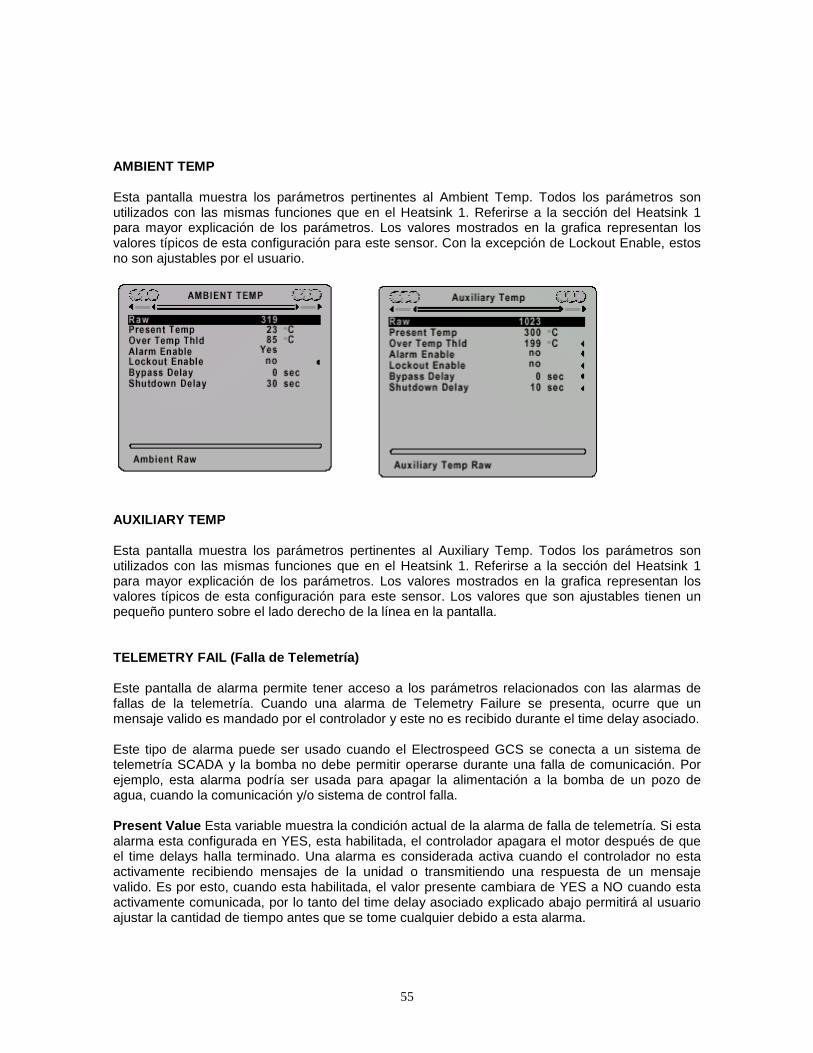
55
AMBIENT TEMP
Esta pantalla muestra los parámetros pertinentes al Ambient Temp. Todos los parámetros sonutilizados con las mismas funciones que en el Heatsink 1. Referirse a la sección del Heatsink 1para mayor explicación de los parámetros. Los valores mostrados en la grafica representan losvalores típicos de esta configuración para este sensor. Con la excepción de Lockout Enable, estosno son ajustables por el usuario.
AUXILIARY TEMP
Esta pantalla muestra los parámetros pertinentes al Auxiliary Temp. Todos los parámetros sonutilizados con las mismas funciones que en el Heatsink 1. Referirse a la sección del Heatsink 1para mayor explicación de los parámetros. Los valores mostrados en la grafica representan losvalores típicos de esta configuración para este sensor. Los valores que son ajustables tienen unpequeño puntero sobre el lado derecho de la línea en la pantalla.
TELEMETRY FAIL (Falla de Telemetría)
Este pantalla de alarma permite tener acceso a los parámetros relacionados con las alarmas defallas de la telemetría. Cuando una alarma de Telemetry Failure se presenta, ocurre que unmensaje valido es mandado por el controlador y este no es recibido durante el time delay asociado.
Este tipo de alarma puede ser usado cuando el Electrospeed GCS se conecta a un sistema detelemetría SCADA y la bomba no debe permitir operarse durante una falla de comunicación. Porejemplo, esta alarma podría ser usada para apagar la alimentación a la bomba de un pozo deagua, cuando la comunicación y/o sistema de control falla.
Present Value Esta variable muestra la condición actual de la alarma de falla de telemetría. Si estaalarma esta configurada en YES, esta habilitada, el controlador apagara el motor después de queel time delays halla terminado. Una alarma es considerada activa cuando el controlador no estaactivamente recibiendo mensajes de la unidad o transmitiendo una respuesta de un mensajevalido. Es por esto, cuando esta habilitada, el valor presente cambiara de YES a NO cuando estaactivamente comunicada, por lo tanto del time delay asociado explicado abajo permitirá al usuarioajustar la cantidad de tiempo antes que se tome cualquier debido a esta alarma.

56
Alarm Enable Este punto controla si ante una alarma presente de Telemetria el controlador apagael motor.
Lockout Enable Este punto controla cuando el controlador intenta o no un rearranque automáticocuando el motor se ha apagado debido a una alarma por telemetría. Si esta configurado en YES yun shutdown por Telemetry Fail ocurre, el controlador se bloqueara y evitara cualquier intento derearranque automático
Bypass Delay Este setpoint representa la cantidad de tiempo en segundos que el controladorignorara una alarma existente de Telemetry después del arranque. Si este valor es diferente decero, el controlador arrancara el motor aun la alarma persista. Si el sistema de comunicación noesta operando, este podría causar un shutdown del motor una y otra vez hasta que el delaystermine. En cambio, si utiliza Alarm Hold Off Delay timer para manejar los rearranques cuando elcontrolador tenga una falla en las comunicaciones.
Shutdown Delay Este parámetro representa la cantidad de tiempo en segundos que el controladorpermitirá que exista una alarma de telemetría antes de apagarse el motor. Este tiempo de alarmadebe ser ligeramente mayor que el ciclo total de tiempo del computador que maneja el SCADA. Porejemplo, si el computador de SCADA revisa el controlador en particular cada nueve minutos, laalarma debe ser configurada a 600 segundos o 10 minutos. Si el host del sistema SCADA no secomunica con este controlador dentro del time delay, este motor será apagado automáticamente.
Alarm HldOff Dly El parámetro de Alarm Hold Off Delay controla cuando el GCS permitirá que elmotor sea arrancado mientras una alarma de telemetría exista. Si un bypass delay se introducedentro de este parámetro y el sistema de comunicación no esta operando, el controlador arrancarael motor y probablemente solo correrá hasta que el Bypass y Shutdown delays terminen. Estasituación se repetirá y puede resultar en numerosas innecesarias arranques de motor y quepueden causar daños. Este único Hold Off Delay permite que el controlador atienda y determinecuando cualquier trafico de comunicación exista en el sistema de telemetría. Si la comunicación esvalida, este asume que el sistema de telemetría esta en orden y funcionando y el motor estará esposibilidad de arrancar. En este caso, el computador SCADA debe entonces comunicarse con elcontrolador GCS especifico dentro del Bypass mas el Shutdown Delay para prevenir un shutdowndel motor. Note que son diferentes el Bypass y Lockout time delays, esta alarma Alarm HoldoffDelay timer es disparada por cualquier trafico de datos, no solo mensajes destinados para estaunidad
Aux Rstrt Parms Cuando se configura YES, el parámetro de Auxiliary Restart Parameters causaque l controlador Electrospeed utilice los parámetros de rearranque explicados a continuación,

57
cuando este se apaga debido a una alarma Telemetry Fail. Si este parámetro se configura en NO,el controlador usara el parámetro global de rearranques cuando intente un rearranque automático.El parámetro global de rearranque se configura del menú de Electrospeed GCS setup.
Allowed Starts Allowed starts controla cuantos rearranques automáticos serán permitidos cuandoel controlador tiene un shutdown debido a una Telemetry Fail y Aux Rstrt Parms han sidoestablecidos YES.
Restart Delay Restart Delay controla la cantidad de tiempo que el controlador esperara antes deintentar rearrancar el motor cuando este ha tenido un shutdown por Telemetry Fail y Aux RstrtParms han sido configurados YES.
ALARM SETUP
La pantalla de configuración de alarmas proporciona una ventaja para el usuario, que la mayoría delas alarmas se puedan habilitar o deshabilitar dentro de una sola pantalla. Esta configuración dealarmas se encuentra en el menú de FAULTS & UNDLD.Undld Alm Enbl Underload Alarm EnableOvld Alm Enbl Overload Alarm EnableLow Speed Trip Low Speed Alarm EnableAux Tmp Alm Enb Auxiliary Temperature AlarmOvrVlt Alm Enbl Input OverVoltage AlarmUndVlt Alm Enbl Input UnderVoltage AlarmVunbal Alm Enbl Input Voltage Unbalance AlarmTel Fail Alm En Telemetry Failure Alarm EnableEstas alarmas se encuentran en el menú de GCS MODULES / ONBOARD I/O.DI1 Alm Enbl Digital Input 1 Alarm EnableDI2 Alm Enbl Digital Input 2 Alarm EnableDI3 Alm Enbl Digital Input 3 Alarm EnableAI1 Hi Thld Alm Analog Input 1 High Threshold Alarm EnableAI1 Lo Thld Alm Analog Input 1 Low Threshold Alarm EnableAI2 Hi Thld Alm Analog Input 2 High Threshold Alarm EnableAI2 Lo Thld Alm Analog Input 2 Low Threshold Alarm EnableLa configuración de este parámetro invalid time alarm esta en menú de CURRENT TIME.Invld Alm Enb Invalid Time Alarm Enable

58
FUNCIONES LOGICAS PROGRAMABLES
La pantalla de funciones lógicas programables da acceso a las funciones programables delElectrospeed GCS. Por el momento solo hay funciones pre-programadas que controlan lafrecuencia de salida. Se pueden hacer funciones adicionales, las cuales serán accesadas pormedio de este menú. Sin embargo, utilizando las funciones del controlador lógico programable deusuario (User Programmable Logic controller UPLC), muchos tipos de algoritmos de controldiferentes se pueden crear.
PROG FUNCT SETUP
La pantalla de Funciones programables da acceso a las funciones disponibles.
OUTPUT FREQUENCY CONTROL
La pantalla de Output Frecuency Control (control en la frecuencia de salida) da al usuario tresmodos de control de velocidad: PID, Seguimiento análogo y Punto de referencia de frecuencia.Cuando el usuario selecciona uno de estos tres modos, la pantalla cambiara para mostrar losparámetros pertenecientes a este tipo de algoritmo de control.
Control Mode Determina cual tipo de algoritmo controlara la velocidad que el controlador manejara.Cada uno de los tres algoritmos usa un conjunto de variables que controlan su operación.

59
Seleccione el modo de operación primero, y el resto de la pantalla cambiara para mostrar losparámetros del método de control seleccionado.
Control Mode: PID Cuando se opera con el modo PID, el controlador procurara variar su frecuenciade salida manteniendo una señal análoga de entrada dada.
Setpoint Input Muestra que señal de entrada será usada para que el controlador alcance ymantenga. Las señales de entrada disponibles son:
MN SET Manual Setpoint (Punto de referencia manual). El controladorcambiara su frecuencia de salida para alcanzar este valor de señalrealimentado. Las unidades de ingeniería entradas aquí deben coincidir conlas unidades de la entrada de realimentación seleccionada.
AI1 Análoga Input 1 (Entrada análoga 1). Calibra el valor medido de la señalanáloga presente en la entrada análoga 1.
AI2 Análoga Input 2 (Entrada análoga 2). Calibra el valor medido de la señalanáloga presente en la entrada análoga 2.
X1 AI1, AI2 Expansión I/O module 1, Análoga Input 1 o 2 (Modulo deexpansión I/O 1, Entrada análoga 1 o 2). Calibra la señal análoga presente enla entrada análoga 1 o 2 del modulo de expansión I/O 1.
X2 AI1, AI2 Expansión I/O module 2, Análoga Input 1 o 2 (Modulo deexpansión I/O 2, Entrada análoga 1 o 2). Calibra la señal análoga presente enla entrada análoga 1 o 2 del modulo de expansión I/O 2.
X3 AI1, AI2 Expansión I/O module 3, Análoga Input 1 o 2 (Modulo deexpansión I/O 3, Entrada análoga 1 o 2). Calibra de la señal análoga presenteen la entrada análoga 1 o 2 del modulo de expansión I/O 3.
TRK C1..C8 Tracker GCS input channel 1...8 (Canales de entrada del GCS1....8). Este valor es proporcionado por un modulo Tracker GCS conectadoen el CITIBus.
Feedback Input La entrada de realimentación determina que señal será usada como realimentaciónen el algoritmo de control PID. Note que el algoritmo no funcionara apropiadamente si la entrada

60
del punto de referencia y la entrada de realimentación son las mismas. Las señales de entradadisponibles son:
MN SET Manual Setpoint (Punto de referencia manual). El controladorcambiara su frecuencia de salida para alcanzar el valor de esta señal derealimentación. Las unidades de ingeniería entradas aquí deben coincidir conlas unidades de la entrada de realimentación seleccionada.
AI1 Análoga Input 1 (Entrada análoga 1). Calibra el valor escalado de laseñal análoga presente en la entrada análoga 1.
AI2 Análoga Input 2 (Entrada análoga 2). Calibra el valor escalado de laseñal análoga presente en la entrada análoga 2.
X1 AI1, AI2 Expansión I/O module 1, Análoga Input 1 o 2 (Modulo deexpansión I/O 1, Entrada análoga 1 o 2). Calibra la señal análoga presenteen la entrada análoga 1 o 2 del modulo de expansión I/O 1.
X2 AI1, AI2 Expansión I/O module 2, Análoga Input 1 o 2 (Modulo deexpansión I/O 2, Entrada análoga 1 o 2). Calibra la señal análoga presenteen la entrada análoga 1 o 2 del modulo de expansión I/O 2.
X3 AI1, AI2 Expansión I/O module 3, Análoga Input 1 o 2 (Modulo deexpansión I/O 3, Entrada análoga 1 o 2). Calibra la señal análoga presenteen la entrada análoga 1 o 2 del modulo de expansión I/O 3.
TRK C1..C8 Tracker GCS input channel 1...8. (Canales de entrada del GCS1....8). Este valor es proporcionado por un modulo Tracker GCS conectadoen el CITIBus.
Prop Gain Ganancia proporcional. Fija el porcentaje (0 a 100%) de la ganancia proporcional en elalgoritmo de control PID. El valor típico es el 3%. Cada vez que el algoritmo de control esrecalculado, una cantidad proporcional al producto entre el “error” y la ganancia se suma o resta dela velocidad demandada. El componente de ganancia proporcional en el algoritmo modifica lademanda de velocidad para reducir el tiempo de respuesta del sistema.
Integ Gain Ganancia integral. Fija el porcentaje (0 a 100%) de la ganancia integral en el algoritmode control PID. El valor típico es el 3%. Cada vez que el algoritmo de control es actualizado, elvalor análogo en la entrada es comparado con el punto de referencia. La diferencia entre estos

61
dos representa el “error”. La demanda en la velocidad de salida es aumentada o disminuida enuna cantidad proporcional al producto del error y la ganancia integral.
Deriv Gain Ganancia derivativa, Fija el porcentaje (0 a 100%) de la ganancia derivativa en elalgoritmo de control PID. El valor típico es el 0%. La ganancia derivativa es calculada como elproducto de la diferencia entre las últimas dos entradas análogas leídas (la realimentación). Estecomponente disminuirá la demanda de velocidad si la diferencia es negativa e incrementara lademanda de velocidad si la diferencia es positiva. Por lo tanto la ganancia derivativa es tambiénsumada o restada de la demanda de velocidad para limitar la sobrecarga del sistema cuando unarespuesta rápida es necesaria.
Cntlr Dir El controlador de dirección controla la polaridad en que el algoritmo de control PIDaplicara los ajustes de velocidad. (Acción directa (FWD) o acción inversa (REV)) En el modo FWDel controlador incrementara su frecuencia de salida en respuesta a un incremento en el punto dereferencia. En el modo (REV) disminuirá su frecuencia de salida en respuesta a un incremento enel punto de referencia.
Man Stpnt Muestra el valor del punto de referencia manual introducido que el Electrospeed GCSintentara igualar. El controlador aumentara (o disminuirá) su frecuencia de salida para lograr esto.Si alguna entrada análoga es seleccionada como el punto de referencia, el valor de esta entrada esmostrado aquí.
AI1 Prsnt Val (Analog Input 1, Present Value). Muestra el valor actual de la señal de realimentacióndel lazo de control PID. Si alguna otra entrada análoga es seleccionada, el valor de esta entradaes mostrada aquí.

62
Control Mode: AN FOL (Seguimiento análogo). Cuando se opera en este modo de control, elcontrolador variara su frecuencia de salida entre los límites Low Speed Clamp y High Speed Clampen una proporción de 0 a 100% de la señal análoga de entrada seleccionada.
Setpoint Input Dicta que señal de entrada intentara seguir el Electrospeed. Las entradasdisponibles son las mismas que en el modo de control PID pero excluyendo la opción ManualSetpoint (Punto de referencia manual).
Setpoint Value (Valor del punto de referencia). Muestra el valor presente de la entrada análogaseleccionada como punto de referencia (setpoint).
Output Freq (Frecuencia de salida). Muestra la frecuencia de salida que el Electrospeed GCS estagenerando actualmente.
Control Mode: FR SET Cuando el Electrospeed GCS esta operando en este modo, el intentaraoperar a la frecuencia programada por el usuario. Muchos factores pueden afectar la habilidad delcontrolador para alcanzar esta frecuencia, entre los que están: ILimit, High Speed Clamp y LowSpeed Clamp.
Set Frequency Este parámetro es la frecuencia de operación requerida por el controlador. Estepunto de referencia puede también ser entrado por la pantalla Espeed GCS Setup 1.
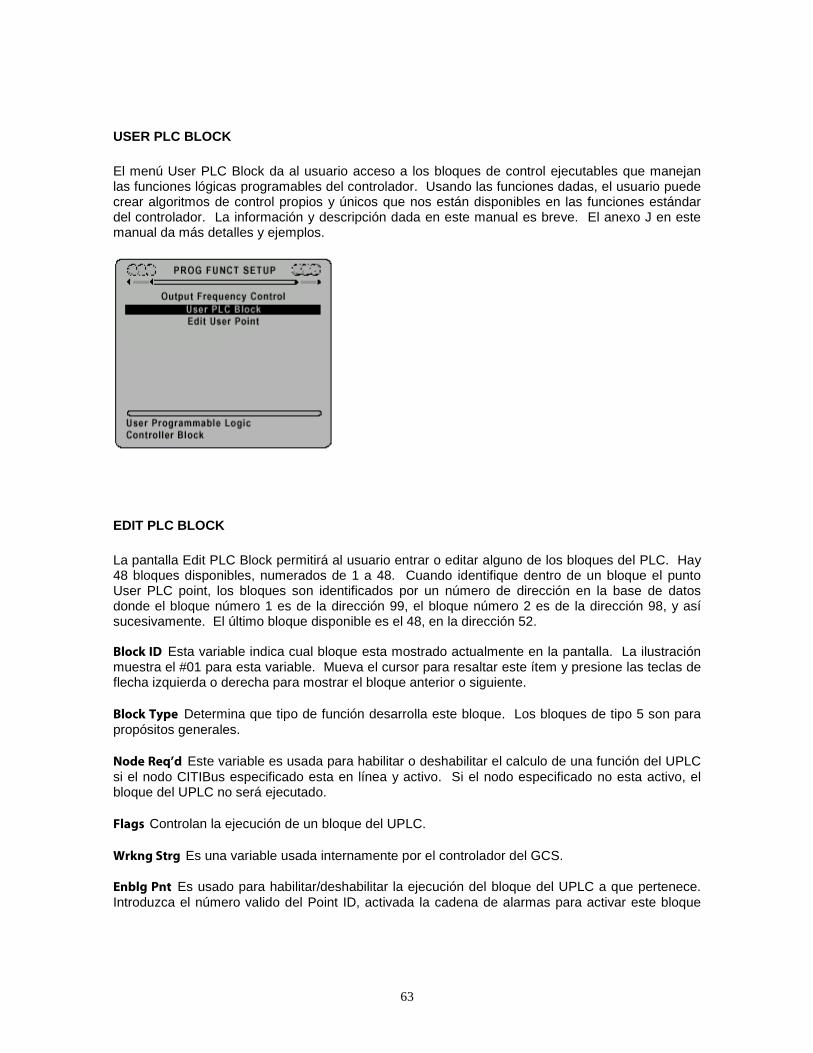
63
USER PLC BLOCK
El menú User PLC Block da al usuario acceso a los bloques de control ejecutables que manejanlas funciones lógicas programables del controlador. Usando las funciones dadas, el usuario puedecrear algoritmos de control propios y únicos que nos están disponibles en las funciones estándardel controlador. La información y descripción dada en este manual es breve. El anexo J en estemanual da más detalles y ejemplos.
EDIT PLC BLOCK
La pantalla Edit PLC Block permitirá al usuario entrar o editar alguno de los bloques del PLC. Hay48 bloques disponibles, numerados de 1 a 48. Cuando identifique dentro de un bloque el puntoUser PLC point, los bloques son identificados por un número de dirección en la base de datosdonde el bloque número 1 es de la dirección 99, el bloque número 2 es de la dirección 98, y asísucesivamente. El último bloque disponible es el 48, en la dirección 52.
Block ID Esta variable indica cual bloque esta mostrado actualmente en la pantalla. La ilustraciónmuestra el #01 para esta variable. Mueva el cursor para resaltar este ítem y presione las teclas deflecha izquierda o derecha para mostrar el bloque anterior o siguiente.
Block Type Determina que tipo de función desarrolla este bloque. Los bloques de tipo 5 son parapropósitos generales.
Node Req’d Este variable es usada para habilitar o deshabilitar el calculo de una función del UPLCsi el nodo CITIBus especificado esta en línea y activo. Si el nodo especificado no esta activo, elbloque del UPLC no será ejecutado.
Flags Controlan la ejecución de un bloque del UPLC.
Wrkng Strg Es una variable usada internamente por el controlador del GCS.
Enblg Pnt Es usado para habilitar/deshabilitar la ejecución del bloque del UPLC a que pertenece.Introduzca el número valido del Point ID, activada la cadena de alarmas para activar este bloque

64
del UPLC. Cuando la cadena de alarmas llamada es activada, este bloque del UPLC será tambiénactivada y procesada.
Point ID 0 Mantiene el número del primer punto a ejecutar. Las entradas validas van de ID 4095hasta ID 3840. La rutina del UPLC ejecutara cualquier punto listado antes de un Point ID con valor0. Si un valor de Point ID valido existe en algún subsiguiente Point ID ellas no serán ejecutadas.
Point ID 1 Mantiene el número de el segundo punto a ejecutar. Las entradas validas van de ID4095 hasta ID 3840.
Point ID 2 Mantiene el número de el tercer punto a ejecutar. Las entradas validas van de ID 4095hasta ID 3840.
Point ID 3 Mantiene el número de el cuarto punto a ejecutar. Las entradas validas van de ID 4095hasta ID 3840.
Point ID 4 Mantiene el número de el quinto punto a ejecutar. Las entradas validas van de ID 4095hasta ID 3840.
Point ID 5 Mantiene el número de el sexto punto a ejecutar. Las entradas validas van de ID 4095hasta ID 3840.
Point ID 6 Mantiene el número de el séptimo punto a ejecutar. Las entradas validas van de ID4095 hasta ID 3840.
Point ID 7 Mantiene el número de el octavo punto a ejecutar. Las entradas validas van de ID 4095hasta ID 3840.
EDIT USER POINT
El menú Edit User Point en conjunto con el menú User PLC Blocks, da acceso a puntos en la basede datos usados para desarrollar cálculos y funciones lógicas.
Point ID: La variable Point ID es usada para identificar cual punto de la base de datos esta siendomostrada o editada. Mueva el cursor a este lugar y presione las teclas de flecha IZQ/DER para

65
mostrar el punto anterior/siguiente de la base de datos. Presione ENTER para editar el puntoactual. El controlador del GCS tiene 256 puntos de base de datos disponibles.
Input 0: Esta variable es usada para indicar el primer punto que será usado por esta función delUPLC. Este punto puede ser numerado con cualquiera de los puntos de la base de datosdisponibles en el controlador del GCS y no se limita a las 256 posiciones de la base de datos. Unalista completa de los puntos direccionables de la base de datos esta disponible en la guía deaplicaciones.
Input 1: Esta variable es usada para indicar el segundo punto que será usado por esta función delUPLC. Este punto puede ser numerado con cualquiera de los puntos de la base de datosdisponibles en el controlador del GCS y no es limitada las 256 direcciones de la base de datos.
Input 2: Esta variable es usada para indicar el tercer punto que será usado por esta función delUPLC. Este punto puede ser numerado con cualquiera de los puntos de la base de datosdisponibles en el controlador del GCS y no es limitada las 256 direcciones de la base de datos.
Input 3: Esta variable es usada para indicar el cuarto punto que será usado por esta función delUPLC. Este punto puede ser numerado con cualquiera de los puntos de la base de datosdisponibles en el controlador del GCS y no es limitada las 256 direcciones de la base de datos.
66
Funct ID: Esta variable mantiene el número de identificación de la función requerida. Estasfunciones están listadas en el anexo J.
Prsnt Val: Este parámetro contiene el valor numérico actual de este punto.
Fct Dflt: El valor de fabrica por defecto del punto de la base de datos actual es guardado en estavariable.
Minimum: Indica el valor mínimo del punto actual de la base de datos.
Maximum: Indica el valor máximo del punto actual de la base de datos.
Bitfield: Esta variable contiene un valor codificado de bits que clasifica el punto de la base de datosde acuerdo a el valor contenido. El anexo J describe los valores disponibles.
Stage: Reservado

67
PANTALLA CUSTOM USER
El menú Custom User Screen da el punto de entrada para personalizar las pantallas mostradasque pueden ser diseñadas por el usuario. Cuando aparezcan nuevas características y funciones,ellas serán distribuidas como software de actualización.

68
SISTEMA SCADA & SECURITY
El menú de SCADA & Security & System proporciona acceso a varias sistemas de mantenimiento,seguridad y opciones de comunicaciones característicos en el Electrospeed GCS.
SISTEMA
Esta pantalla proporciona acceso a varios parámetros concernientes al sistema de mantenimiento.
Ext HOA Este parámetro, switch externo HAND-OFF-AUTO (HOA), maneja si el controladorGCS utiliza la entrada digital de la tarjeta como entrada instalada externa o remotamentecolocando un switch HOA. Cuando este parámetro esta habilitado, la entrada digital 1 y 2 manejaneste switch HOA y no pueden ser usados para otro propósito particular. El estado de estasentradas se reconocen cuando el GCS opera en modo AUTO o HAND (arranque manualúnicamente). El centro de la posición OFF de este switch se interpreta como un comando deshutdown manual. Revise operación básica para la información respecto a modos de operación.
Reset Setpoints Este punto de control maneja si el controlador GCSreprograma todos sus parámetros y valores de setpoint a laconfiguración por defecto que se instalo en la fabrica. Así mismola función de este parámetro es colocar en cero todos losacumuladores de tiempo, contadores / temporizadores. Esto se usatípicamente cuando el controlador va a ser movido y reinstaladoen otra aplicación o lugar. Esto proporciona que el usuario

69
mantenga un conocimiento conservador del arranque delcontrolador
Updte Flash Now El parámetro Update Flash Now manda a que el controlador copieinmediatamente todos sus parámetro internos, setpoints y valores de dispositivo dealmacenamiento de la tarjeta de memoria. Esta función solo trabajara correctamente cuando elmotor esta parado. Si el motor esta funcionando cuando el setpoint esta configurado a YES, eldisplay mostrara un mensaje de error “err” y la memoria no será guardada. El almacenamiento dela memoria flash contiene el programa, código de base de datos así como las configuraciones delusuario. Esta se usa cuando es necesario reemplazar la batería que carga la memoria RAM.Siempre que una copia de la RAM de los setpoint sea valida, pero diferente de la copia de lamemoria flash, el controlador automáticamente actualizara y realizara una copia en la memoriaflash cada vez que se encienda el controlador. Si la memoria del controlador falla o se descarga, elusuario puede ejecutar este comando para preservar su configuración en caso de una falla depotencia.
RCB Configuration Remote Converter Board Configu-ration se usa para acceder al menú paraconfiguración adicional de la sección de control de circuitos de la converter. Ilumine este ítem yoprima ENTER para acceder al menú siguiente.
Software Rev Num El software revisión levels del modulo GCS se conecta junto al sistema decontrol que se describe aquí. Ilumine este ítem y oprima ENTER para acceder al submenú.
RCB SETUP
La configuración del Remote Converter Board, es usada en el Electrospeed GCS para utilizar masde una tarjeta conversora de potencia. Utilizar múltiples tarjetas conversoras reduce la cantidad dedistorsión armónica reflejada dentro de suministro de energía al controlador. Contacte el grupo detecnologías de Centrilift (Centrilift’s Control Technologies) para obtener mayor información acercadel tema.
RCB Type Muestra el tipo de Remote Converter Board puede ser configurada.
RCB Address Muestra el Ls que es la dirección de la Remote Converter Boardpuede ser configurada de 1 hasta 4.
RCB Last Address Muestra el numero de la dirección mayor en donde laremote board fue instalada.

70
Output IA IB & IC Muestra la corriente de salida del controlador en lastres fases.
RCB 2 IA IB & IC Se muestra la salida de corriente prolongada sobre lastres fases de la tarjeta remota converter 2.
RCB 3 IA IB & IC Se muestra la salida de corriente prolongada sobre lastres fases de la tarjeta remota converter 3.
RCB 4 IA IB & IC Se muestra la salida de corriente prolongada sobre lastres fases de la tarjeta remota converter 4.
Software Rev Num El software revisión num del el GCS modules se conecta junto al sistema decontrol que se describe aquí. Ilumine este ítem y presione ENTER para acceder a este submenú.
CONFIGURACION SCADA
El menú de SCADA SETUP agrupa los parámetros relacionados con el control de comunicaciónpara dispositivos externos como sistema de control por computadores y dispositivos de telemetría.Oprima la flecha derecha del sistema para acceder a este menú.
Com Protocol Communication Protocol permite al usuario seleccionar el lenguaje de comunicaciónque el controlador usara para comunicarse electrónicamente por medio de la telemetría y sistemasde computador. La configuración típica es MODBUS TM RTU. Busque el registro de dirección deMODBUS TM , en la sección de anexos para información mas detallada.
Baud Rate El rango de Baudios configura la velocidad decomunicación con telemetría y los sistemas de computadores. Elrango disponible va desde 1200 hasta 9600 baud. configuración del Serial puede serNo Parity, 1 Start, 1 Stop, 8 Data Bits.
RTU Address Remote Terminal Unit Address es la variable que asigna un numero de 1 a 255 paraeste controlador con el propósito de que se identifique ante la red de comunicación.
PreKey Delay PreKey Delay implementa un “Push to Talk” o “Request To Send (RTS)” que esusado para confirmar la salida del RTS en el puerto de comunicación RS-232 para el usuarioespecifico en el momento antes de comenzar la transmisión de comunicación. Esta señal y/o delay

71
es comúnmente usada para afirmar o sincronizar dos dispositivos de comunicación. En dos víassistema de radio, este RTS puede ser usado como una señal de “Microphone/Transmit”(microforno/trnsmisor) para habilitar la relación de transmisión de los datos de salida.
Intrchr Delay Inter-character delay es una variable del usuario que controla el tiempo admisible detime delay entre caracteres adyacentes de un mensaje activo.
Centl Shutdown Central Shutdown es un sistema que esta dedicado a enunciar la presencia de uncomando de shutdown ya sea por medio de SCADA o PLC. Cuando esta variable esta configuradaa cualquier valor diferente de cero, el controlador, parara el motor si esta corriendo y deshabilitaracualquier intento de rearranque automático hasta que esta condición sea borrada. Aunque estavariable puede ser borrada localmente, sea cuidadoso al hacerlo, porque desde otro sistema decontrol remoto puede requerirse y/o depende de que la unidad este bajo shutdown.
HW Handshake HardWare Handshake son tres estados de variable que controla el tipo desincronización de comunicación que este activa. Posibles opciones son: none, RTS o R/CTS.
None Selecciona entre tres, un cable multipar para puerto decomunicación, (RX,TX,GND).
RTS Selecciona entre 4, un cable multipar para puerto decomunicación, (RX,TX,RTS,GND). Cuando el RTS esta activo y transmitiendo, el controladorafirmara la línea de señal de RTS para un periodo igual que el valor del parámetro de configuradoen el PreKey Delay anteriormente explicado. después de que este time delay halla terminado, ladata es transmitida.
R/CTS Selecciona entre 5, un cable multipar para puerto decomunicación, (RX,TX,RTS,CTS, GND). Cuando el RTS/CTS esta activo y transmitiendo, elcontrolador afirmara la línea de señal de RTS y esperara hasta que la línea de CTS este tambiénafirmada por el modem externo. Una vez la línea CTS este afirmada, entonces el controlador GCStransmitirá la data.

72
REGISTRO DE COMUNICACION SCADA
Esta pantalla muestra la información pertinente a la operación del registro de comunicaciónSCADA. Este menú se usa para diagnosticar las comunicaciones con el equipo de telemetría.Muestra un acumulador para varios errores y contador de mensajes.
SEGURIDAD
Este menú da acceso a las características de sistema de seguridad del Electrospeed GCS. Oprimala flecha derecha del menú del SCADA SETUP para alcanzar esta pantalla.
User Pswd Este parámetro, User Password, contiene la clave de seguridad del usuario.Este puede ser introducido aquí o en menú de GCS SETUP.
Level 1 Pswd Level One Password es el valor que debe ser introducido dentro del parámetro deUser Password para tener acceso a la edición de los setpoints. Si la clave de usuario que seintroduzca es diferente a la instalada, esta variable mostrara XXXXX.
Level 2 Pswd es el valor que debe ser introducido dentro del parámetro de User Password paratener acceso a la edición de todos los setpoints y el sistema de configuración de variables. Si la

73
clave. Si la clave de usuario que se introduzca es diferente a la instalada, esta variable mostraraXXXXX.
Pswd To Clr Lk Password to Clear Lockout, controla cuando existe una condición de lockout, unaclave de usuario debe ser introducido para que el este lockout sea borrado y se pueda rearrancarel motor.
User Pswd T.O. El parámetro de User Password Time Out configura la cantidad de tiempo despuésde que cualquier tecla sea oprimida antes de que el Electrospeed GCS configura la clave deusuario a cero.
Security Jmp St Security Jumper Status muestra cuando el servicio técnico de Centrilift securityjumper ha sido instalado.
TIEMPO ACTUAL
Current Time Esta pantalla muestra la configuración presente de labatería, en tiempo real del sistema de operación del GCS. El principal propósito del reloj esgrabar los registros de los shutdown y eventos a las fechas y horas de tiempo real. El tiempo realdel GCS real obedece en elYEAR 2000.Note el Invalid Time Alarm setpoint. Esta alarma enuncia el hecho que el reloj contenga datosvalidos en tiempo real. Si esta alarma esta activa, use el SET TIME para introducir la fecha y horacorrecta y esta alarma se desactivara.
CONFIGURACION DEL TIEMPO
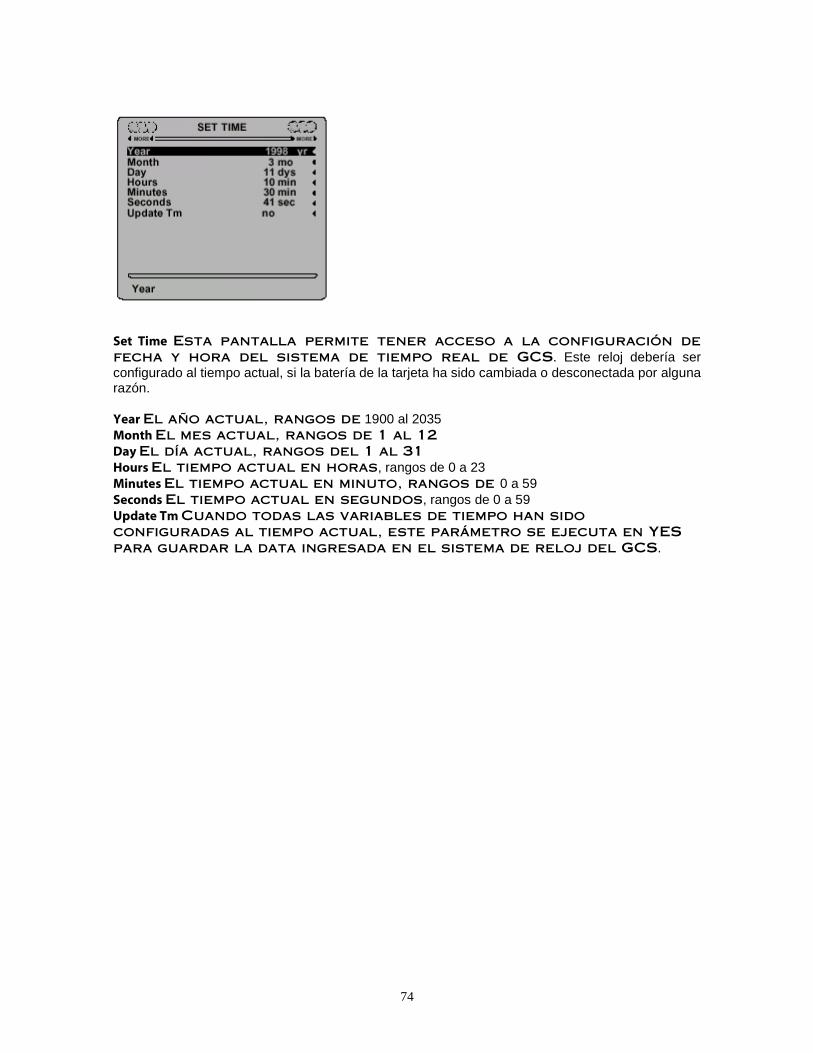
74
Set Time Esta pantalla permite tener acceso a la configuración defecha y hora del sistema de tiempo real de GCS. Este reloj debería serconfigurado al tiempo actual, si la batería de la tarjeta ha sido cambiada o desconectada por algunarazón.
Year El año actual, rangos de 1900 al 2035Month El mes actual, rangos de 1 al 12Day El día actual, rangos del 1 al 31Hours El tiempo actual en horas, rangos de 0 a 23Minutes El tiempo actual en minuto, rangos de 0 a 59Seconds El tiempo actual en segundos, rangos de 0 a 59Update Tm Cuando todas las variables de tiempo han sidoconfiguradas al tiempo actual, este parámetro se ejecuta en YESpara guardar la data ingresada en el sistema de reloj del GCS.

75
ANALOG SETUP & DISPLAYLa pantalla de Análoga Setup permite mostrar y ajustar la salida de corriente y voltaje así como laentrada de voltajes.
CONFIGURACION ANALOGAS
Output IA Output Current Phase A presenta valores medidos de la salida de corriente eléctrica enla fase A de las polifases de sistema de poder.Output IB Output Current Phase B presenta valores medidos de la salida de corriente eléctrica enla fase B de las polifases de sistema de poderOutput IC Output Current Phase C se presenta, valores medidos de la salida de corriente eléctricaen la fase C de las polifases de sistema de poderOutput Volts Output Volts muestra el presente valor de voltaje AC disponible de la salida delcontrolador.In Voltage AB Input Voltage Ø AB muestra la fase a fase AC, nivel de voltaje RMS presente através de las fases A y B dentro del controlador. Estos voltajes leídos pueden ser leídos ygraficados.In Voltage BC Input Voltage Ø BC muestra la fase a fase BC, nivel de voltaje RMS presente através de las fases B y C dentro del controlador. Estos voltajes leídos pueden ser leídos ygraficados.In Voltage CA Input Voltage Ø CA muestra la fase a fase CA, nivel de voltaje RMS presente através de las fases B y C dentro del controlador. Estos voltajes leídos pueden ser leídos ygraficados.

76
GCS MODULESLa pantalla del GCS MODULES permite el acceso a el submenú que controla los parámetros deconfiguración para todos los módulos de Input/Output, ambos incorporados en la tarjeta o opcionalen tarjetas de expansión así como el sub-menú Tracker. Para seleccionar la configuraciónonboard I/O, use las teclas de flechas para seleccionar onboard I/O y presione la tecla ENTER. ElGCS mostrara la primera pantalla de calibración para las tarjetas de I/O. Para acceder las otraspantallas de configuración, mueva el cursor sobre el ítem del menú deseado y presione ENTERpara mostrar la pantalla.
ONBOARD I/O
El menú Onboard I/O da acceso a las pantallas para configuración de las tarjetas I/O. Estasconsisten de dos entradas análogas de 0-10V DC y tres entradas digitales (estatus). La primerapantalla muestra como será normalmente la INTERNAL AI1, como se muestra en la ilustraciónsiguiente.
INTERNAL ANALOG INPUT 1
Este menú da acceso a todos los parámetros relacionados con la señal de 0-10V DC aplicados a laentrada análoga Terminal #1.
Present Value El numero mostrado representa el valor actual de la señal análoga presente en laentrada análoga Terminal #1.

77
Span & Cfg Este parámetro es usado para seleccionar el rango de la entrada análoga (lecturamáxima a la máxima entrada), la ubicación del punto decimal (dividido por 10, 100 o 1000) y lasunidades de ingeniería (psi, amps, volts, etc.). Mueva el cursor resaltando este parámetro ypresione la tecla ENTER. El cursor cambiara como se muestra en la figura de la izquierda. Eneste punto use la teclas de flechas iz. y dr. Para mover el punto decimal a la iz. Y dr. como senecesita, después presione ENTER. El cursor cambiara para mostrar una pantalla similar a lafigura del centro a la izquierda, el máximo rango de la entrada análoga. Use las teclas arriba/abajoo iz./dr. para ajustar el rango del valor requerido, presione ENTER nuevamente. El cursorcambiara una vez más y permitirá al usuario seleccionar las unidades de ingeniería aplicables a laentrada análoga. Use las teclas arriba/abajo para seleccionar las unidades de ingenieríadisponibles hasta que la deseada aparezca, después presione ENTER nuevamente. La figurainferior izquierda muestra las unidades análogas seleccionadas como “undf” o indefinidas.
Instrument Typ Permite las selección de el tipo de señal conectada a la entrada análoga. Lostipos disponibles son 0-10Vdc, 0-5Vdc, 4-20mA, 10-50mA. Para usar la entrada de corriente, debese conectado un resistor en paralelo del valor apropiado para convertir la señal en voltaje. Porejemplo, use un resistor de 500Ω para convertir 40-20mA a 2-10Vdc. Después seleccione el tipo a4-20mA, y el controlador realizará los cálculos de compensación requeridos.
Offset Use este parámetro para sumar o restar un valor de compensación del valor análogo actual.

78
Hi Thld Setup Este menú de acceso el parámetro asociado con una alarma de umbral alto en laentrada análoga 1. Resalte este ítem y presione ENTER para acceder el menú siguiente.
Lo Thld Setup Este menú da acceso el parámetro asociado con una alarma de umbral bajo en laentrada análoga 1. Resalte este ítem y presione ENTER para acceder el menú siguiente.
HIGH THRESHOLD SETUP
High Threshold Fija el umbral alto de la entrada análoga #1, si excede, el motor se apagara(shutdown).
Hi Thld Alm Enb Dice si el controlados GCS apagara el motor cuando el “Present Value” de laentrada análoga #1 exceda el valor “High Treshld”.
Hi Thld Lk Enbl Dice si el controlador bloqueara “lockout” y prevendrá futuros intentos de re-arranques cuando el GCS apaga el motor por causa de una alarma “Hi Thld Alm Enb”.
Hi Thld Byp Dly Fija el número de segundos que el controlador ignorara una condición de alarma“Hi Thld Alm Enb” que se presente en el tiempo de arranque.
Hi Thld Sd Dly Fija el número de segundos que el controlador ignorara una condición de alarma“Hi Thld Alm Enb” que existe mientras el motor esta corriendo pero solo después que ha pasado eltiempo fijado en “Hi Thld Byp Dly”.
Aux Rstrt Parms Cuando se selecciona “YES”, hace que el controlador del Electrospeed use losparámetros de rearranque auxiliar enumerados a continuación cuando se apaga debido a unaalarma de “Hi Thld Alm Enb” en la entrada análoga 1. Si se selecciona “NO”, el controlador usaralos parámetros de rearranque globales cuando se realiza rearranque automático. Los parámetrosglobales de rearranque son fijados desde el menú Electrospeed GCS setup.
Allowed Starts Dice cuantos rearanques automáticos serán permitidos cuando el controlador seha apagado (shutdown) debido a una alarma de “Hi Thld Alm Enb” en la entrada análoga 1 y elítem “Aux Rstrt Parms” se ha fijado en “YES”.
Restart Delay Controla el tiempo que el controlador esperara después de un intento de rearranqueen el motor cuando se ha apagado (shutdown) debido a una alarma de “Hi Thld Alm Enb” en laentrada análoga 1 y el ítem “Aux Rstrt Parms” se ha fijado en “YES”.
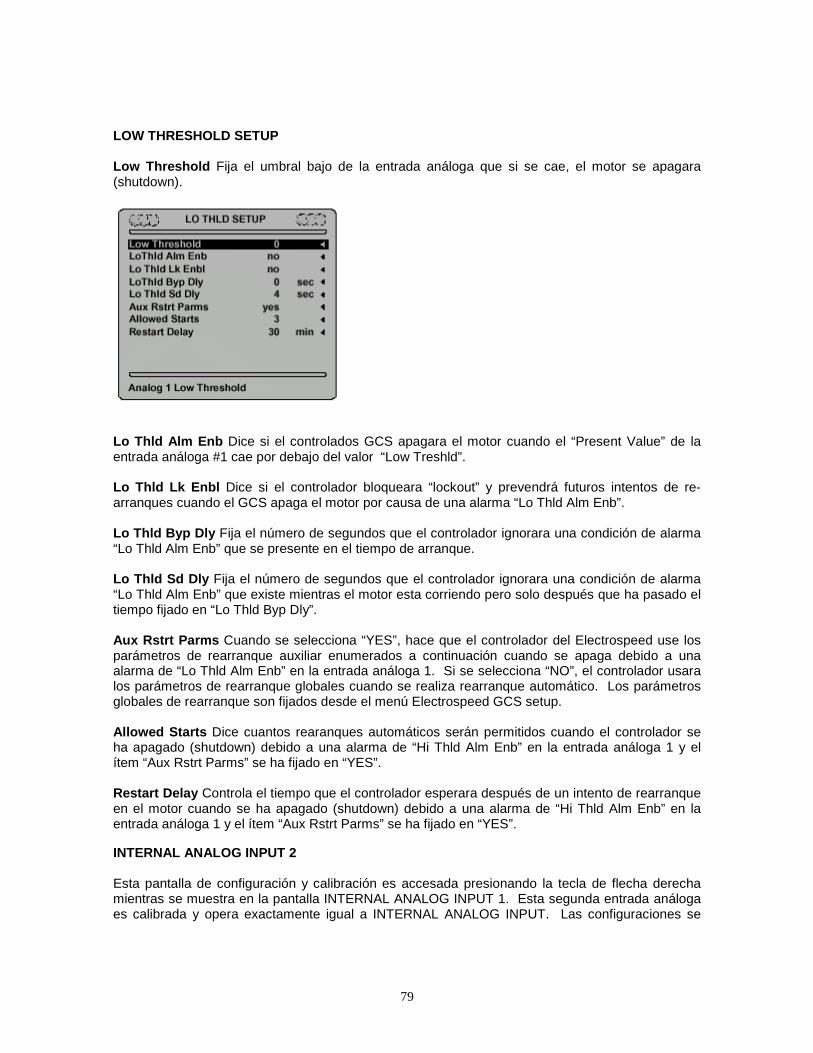
79
LOW THRESHOLD SETUP
Low Threshold Fija el umbral bajo de la entrada análoga que si se cae, el motor se apagara(shutdown).
Lo Thld Alm Enb Dice si el controlados GCS apagara el motor cuando el “Present Value” de laentrada análoga #1 cae por debajo del valor “Low Treshld”.
Lo Thld Lk Enbl Dice si el controlador bloqueara “lockout” y prevendrá futuros intentos de re-arranques cuando el GCS apaga el motor por causa de una alarma “Lo Thld Alm Enb”.
Lo Thld Byp Dly Fija el número de segundos que el controlador ignorara una condición de alarma“Lo Thld Alm Enb” que se presente en el tiempo de arranque.
Lo Thld Sd Dly Fija el número de segundos que el controlador ignorara una condición de alarma“Lo Thld Alm Enb” que existe mientras el motor esta corriendo pero solo después que ha pasado eltiempo fijado en “Lo Thld Byp Dly”.
Aux Rstrt Parms Cuando se selecciona “YES”, hace que el controlador del Electrospeed use losparámetros de rearranque auxiliar enumerados a continuación cuando se apaga debido a unaalarma de “Lo Thld Alm Enb” en la entrada análoga 1. Si se selecciona “NO”, el controlador usaralos parámetros de rearranque globales cuando se realiza rearranque automático. Los parámetrosglobales de rearranque son fijados desde el menú Electrospeed GCS setup.
Allowed Starts Dice cuantos rearanques automáticos serán permitidos cuando el controlador seha apagado (shutdown) debido a una alarma de “Hi Thld Alm Enb” en la entrada análoga 1 y elítem “Aux Rstrt Parms” se ha fijado en “YES”.
Restart Delay Controla el tiempo que el controlador esperara después de un intento de rearranqueen el motor cuando se ha apagado (shutdown) debido a una alarma de “Hi Thld Alm Enb” en laentrada análoga 1 y el ítem “Aux Rstrt Parms” se ha fijado en “YES”.
INTERNAL ANALOG INPUT 2
Esta pantalla de configuración y calibración es accesada presionando la tecla de flecha derechamientras se muestra en la pantalla INTERNAL ANALOG INPUT 1. Esta segunda entrada análogaes calibrada y opera exactamente igual a INTERNAL ANALOG INPUT. Las configuraciones se

80
aplican sobre la entrada análoga del terminal #2. Estas configuraciones son explicadas más afondo en la sección anterior, Internal Análoga Input 1.
INTERNAL DIGITAL INPUT 1
Este menú da acceso a todos los parámetros relacionados con el estatus (on/off) de la señal digitalaplicada a la entrada digital #1. Las entradas digitales son activadas cortocircuitando la terminal deentrada con el terminal común de tierra proporcionado en el mismo bloque. Si los parámetrosexternos HOA son activados, La entrada digital 1 funciona como switch de START y no estadisponible para propósitos generales
Present Status El número mostrado representa la condición actual de la señal presente en laentrada digital #a. Un circuito abierto en esta terminal produce un valor de 1. Si el switch o sensorconectado entre esta terminal y la tierra se cierra, el valor de la entrada será 0. Este es el valor pordefecto de fabrica y puede ser clasificado como una abierto para una alarma.
Actv Alm State Permite a el usuario seleccionar si esta entrada digital es considerada en el estadode alarmas cuando la entrada es 1 o 0. Colocando esta variable en cualquier estado digital (1 o 0)será considerado como el estado de alarma. Cuando el valor de la entrada digital coincide coneste, la alarma será activada y se esta habilitada, causara que el motor se apague (shutdown).
Alarm Enable Controla si el GCS apagara el motor cuando el valor de la entrada digital iguala elparámetro “Actv Alm State”.
Lockout Enable Dice si el Controlador bloqueara “lockout” y prevendrá futuros intentos derearanques automáticos cuando el GCS apaga el motor por causa de una alarma digital en laentrada 1.
Bypass Delay Fija el número de segundos que el controlador GCS ignorara una alarma en laentrada digital 1 que se presente en el tiempo de arranque.
Shutdown Delay Fija el número de segundos que el controlador GCS ignorara una alarma en laentrada digital 1 que se presente mientras el motor este corriendo, pero solo después de que eltiempo fijado en “Bypass Delay” haya terminado.
Aux Rstrt Parms Cuando se selecciona “YES”, los parámetros auxiliares de rearranqueenumerados a continuación serán usados por el controlador del Electrospeed cuando se apaga“shutdown” debido a una alarma en la entrada digital 1. Si se selecciona “NO”, el controlador usara

81
los parámetros de rearranque globales cuando realice un rearranque automático. Los parámetrosde rearranque globales son fijados desde el menú Espeed GCS Setup.
Allowed Starts Controla cuantos rearranques automáticos serán permitidos cuando el controladorapaga (shutdown) el motor debido a una alarma en la entrada digital 1 y el parámetro “Aux RrtrtParms” ha sido fijado en “YES”.
Restart Delay Controla la cantidad de tiempo que el controlador esperara después de intentar elrearranque de el motor cuando fue apagado (shutdown) debido a una alarma en la entrada digital 1y el parámetro “Aux Rstrt Parms” ha sido fijado en “YES”.
INTERNAL DIGITAL INPUT 2
Este menú da acceso a todos los parámetros relacionados con el estatus (on/off) de la señal digitalaplicada a la entrada digital #2. Las entradas digitales son activadas cortocircuitando la terminal deentrada con el terminal común de tierra proporcionado en el mismo bloque. Si los parámetrosexternos HOA son activados, La entrada digital 2 y 3 es dedicada para esta función y no estadisponible para propósitos generales. Todos los parámetros son iguales a los de la Entrada Digital#1. Consulte la sección anterior para detalles.

82
INTERNAL DIGITAL INPUT 3
Este menú da acceso a todos los parámetros relacionados con el estatus (on/off) de la señal digitalaplicada a la entrada digital #3. Las entradas digitales son activadas cortocircuitando la terminal deentrada con el terminal común de tierra proporcionado en el mismo bloque. Si los parámetrosexternos HOA son activados, La entrada digital 2 y 3 es dedicada para esta función y no estadisponible para propósitos generales. Todos los parámetros son iguales a los de la Entrada Digital#1. Consulte la sección anterior para detalles.
EXPANSION I/O MODULE 1
EXPANSION I/O MODULE 2
EXPANSION I/O MODULE 3
TRACKER
Este menú da acceso a los parámetros relacionados con los módulos instalados como tarjetas deexpanción de input/output (entrada/salida) y el sensor TrackerTM downhole. Vea el menú y ladescripción de los parámetros en el manual del operador suministrado con el modulo de aplicación.
GCS Modules Status Permite a el usuario activar módulos de expansión conectados a el bus decomunicaciones CITIBus.

83
MODULES STATUS
Este menú muestra cual de los módulos de expansión disponibles están activados paracomunicarse en el ambiente CITIBus. Mueva el cursor para los items disponibles y presioneENTER para activar este modulo.
System Cntlr System controller esta siempre activado.PCM El modulo de conversión de potencia esta activado cuando esta configurado comocontrolador variable de velocidad.
Tracker Esta activado si un modulo Tracker GCS esta conectado
EIO1, EIO2, EIO3 Si módulos de expansión de Entrada/Salida (I/O) 1, 2 y 3 pueden ser adheridos yactivados

84
EXPANCION Y OPCIONES
El controlador GCS puede interactuar con una variedad de módulos de expansión o sensoresopcionales. La información descrita en este documento es muy breve. Si usted necesita masinformación, por favor remítase al documento individual de cada instrumento.
Sensor Tracker GCS
El equipo del sensor Tracker GCS esta disponible solo el instrumento o con un modulo opcional deexpansión para el controlador Electrospeed GCS. Cuando se utiliza el modulo de expansión, elsensor Tracker se configura y la data es vista con la misma unidad de display grafica que utiliza elcontrolador. La unidad del sistema Tracker se instala el armazón del Electrospeed y se integra alGCS simplemente conectando el cable del CITIBus al controlador del Tracker y finalmente a launidad de display grafica. De esta forma, el controlador es capaz de hacer las lecturas usando lamedida de fondo proporcionada por el Tracker.
Vortex Communication interfase Model VCI-142
La interfase de comunicación VCI-142 fue diseñada para convertir el puerto de comunicación delElectrospeed GCS, RS-232 en dos puertos con cable multi par RS-485 o cuatro puertos cable multipar RS-422. Cualquiera de las dos configuraciones pueden ser comunicadas entre si con un cablemulti par por un sistema de bus, así cada transmisor es controlado es manejado con una altaimpedancia, en estado de standby el controlador es inactivo. El VCI-142 se usa en puerto RS-232para acceder a los datos esta alimentado por 120VAC que son disponibles en el VSD.
Centrilift PHD Sensor Package
El empaque del sensor PHD proporciona una variable de 0-10VDC de señal análoga proporcional ala presión en fondo del pozo donde esta instalado el sensor. Esta señal 0-10VDC es mandadadirectamente dentro de uno de los puertos de entrada análoga con las que el Electrospeed GCSesta equipada.
Equipo Third Party
En general, cualquier de los sensores de third party, mide o detecta instrumentos que pueden serusados en conjunto con el Electrospeed GCS si ellos producen una señas de salida análoga o unaseñal de salida de contacto. En el caso de las señales análogas, la salida debe proporcionar de10VDC o de 4-20mA y es auto alimentada. Si el medidor de 4-20mA esta siendo usado, debeproducir una señal con suficiente capacidad para manejar 500 ohm cargados que convertirá lacorriente en una señal de 2-10 VDC. Entonces, seleccione el tipo de instrumento de 4-20mA y elElectrospeed GCS cancelara la señal de 2VDC y usara el rango de la señal mantenida en la escaladel proceso manejado.

85
MANTENIMIENTOSolo ajustes menores serán necesarios para el arranque inicial, dependiendo de la aplicación. Portal razón algunos de los mantenimiento comunes son los siguientes:
Temperaturas de operación:armazón NEMA 1 (IP33): Mantenga la unidad ubicada lejas de otros equipos que funciones conaltas temperaturas. Los flujos de aire que enfrían los disipadores de calor no deben serrestringidos.armazón NEMA 3 (IP54): En extremadas temperaturas ambiente, este puede ser utilizado en unlugar soleado bajo sombra para que mantenga el rango de temperatura interna que el equipopuede controlar.
Mantenga la unidad limpia:Como cualquier equipo electrónico, la limpieza hace que se extienda la vida útil del equipo.Mantener las condiciones fuertemente unidas:El equipo debe mantenerse lejos del área de las altas vibraciones que puedan perder lasconexiones o causar roce de cables. Todas las interconexiones deben ser revisadas y fuertementeunidas al menos una vez cada seis meses.Repare los capacitores DC Electrolytic: después de seis meses en almacenamiento.Ventilados externo de refrigeración (Solo NEMA 3): Aceite cada 6 meses con SAE20.Para mas información, buscar en el manual GCS Mantenimiento y resolución de problemas.
RESOLUCION DE PROBLEMASGUIA IMPORTANTE DE SEGURIDADEl personal familiarizado con la operación y aplicación de GCS es la encargada de desempeñartodos los trabajos relacionados con este controlador.
PRECAUCION
La siguientes precauciones deben ser tomadas en cuenta. Una falla en el trabajo puede resultar enaccidentes• Voltajes letales están presentes dentro del gabinete cuando la carga esta aplicada.• Los voltajes externos pueden estar presentes en el área final del proceso del cliente así todo el
voltaje sea removido de la entrada del controlador.• Siempre chequear los voltajes que atraviesan el DC Bus antes de realizar cualquier trabajo de
reparación, reemplazar partes o removerlas. Los voltajes letales (mas de 700V DC) puedenestar presentes bajo ciertas condiciones.
• Para prevenir el daño de algún componente, no remueva ningún cable sin retirar la carga depoder del controlador. Permita suficiente tiempo para que se descargue los capacitores—unminuto es normalmente suficiente.
Para mas información, busque el manual de resolución de problemas en el manual de GCS.

86
ANEXO A: ESPECIFICACIONES/VALORESESPECIFICACIONESFrecuencia de operación: 10 a 120 Hz. a 480V ACVoltaje de salida a 60 Hz.: 40 a 480V ACFrecuencia de arranque: 3 a 20 Hz.Tiempo de retraso de sincronización: 0 a 60 sec.Seguro de alta velocidad: 40 a 120 Hz.resolución de frecuencia: ± .1 Hz.Voltios/Hertz: 0.7 - 10 VoltsSeguro de baja velocidad: 5 a 90 Hz.Voltaje adicional: 0 a 200V ACsincronización del voltaje adicional: 0 a 200V ACSobre corriente instantanea (IOT): 170% del valor de la carga llena.Limite de corriente: 0 a 150% del valor de VSCLimite de sincronización de corriente: 0 a 150% del valor de VSCMáxima corriente de sobre carga: 0 a 150% del valor de VSC para torque variable
0 a 200% del valor de VSC para torque constanteSeguro de voltaje: 240 a 550V ACTiempo de Aceleración: 2 a 200 Sec.Tiempo de desaceleración: 2 a 200 Sec.Compensación de slip: 0 a 7.5%Control poder: 24V DCEficiencia: > 98% a valor de cargaFactor de poder: .96 at Full Speed
RANGO DE VALORESVoltaje de entrada:(Standard): 380 a 480V AC + 5%, -20%, 50/60 HzFrecuencia: ± 2 HzCorriente de entrada: Mirar anexo E:Rangos de salida: Mire anexo E:
Temperatura de operación:NEMA 1: (IP 33): 0 a 40° C (32 a 104° F)NEMA 3: (IP 54): 0 a 50° C (32 a 122° F)w/Heater: -40 a 50° C (-40 a 122° F)
Temperatura de almacenamiento: -50 a 70° C (-58 a 158° F)
Humedad:NEMA 1 (IP 33): 95% No condensadaNEMA 3 (IP 54): Apropiado para uso de ambientes externas en todas las condiciones climáticas.
Elevación: Hasta 5000 Ft. sin variar las configuraciones
Peso: Ver anexo H
Dimensiones: Ver anexo H.

87
ANEXO B. HOJA DE TRABAJO

88
ANEXO C.MONITOREO DE INSTALACION / SERVICIO
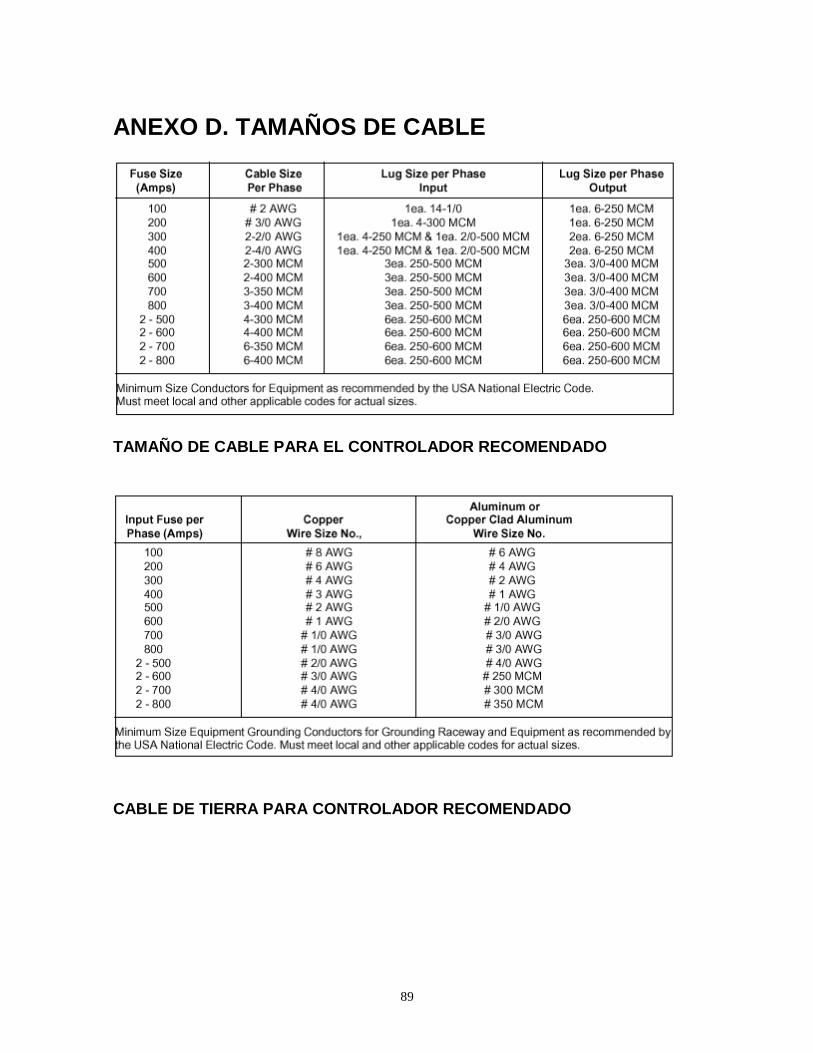
89
ANEXO D. TAMAÑOS DE CABLE
TAMAÑO DE CABLE PARA EL CONTROLADOR RECOMENDADO
CABLE DE TIERRA PARA CONTROLADOR RECOMENDADO

90
ANEXO E. VALORES DE TORQUE VARIABLE VCS
Nota: Cuando se aplica en controladores de velocidad variable cargas de torque variable, la salidacontinua de corriente y salida de KVA están desfasados en 20%. El overload y corrientes dearranque permanecen similares. Los modelos enunciados aquí no incluyen el armazón identificado(i.e. 2200-1VT o 2200-3VT).

91
ANEXO F: CONFIGURACION BASICAEl siguiente procedimiento fijara la mayoría de parámetros requeridos para el arranque normal deel controlador GCS en condiciones normales de operación de bombas sumergibles. Lleve a cabolos pasos de “FORMING CAPACITORS” solo si la unidad no ha operado por 7 meses o más. Esteseguro de seguir las precauciones observadas.
1. Encienda con el switch la potencia principal (Main Input Power), después presione la teclaSTOP.
2. Fije la frecuencia (Frecuency) a 60 Hz.3. Fije el valor de High Speed Clamp a los Hertz requeridos por la aplicación.4. Fije el valor de Low Speed Clamp a los Hertz requeridos por la aplicación.5. Fije el valor de Run ILimit a los amperios nominales del motor X la relación del transformador
X 105%.1. Fije el valor de Sync ILimit a los amperios nominales del motor X la relación del transformador
X 125%2. Fije el valor del Voltage at 60Hz a el valor calculado en la hoja de arranque (START-UP).3. Fije el valor de Vclamp a el valor del voltaje de entrada, pero no más grande de 480 voltios.4. Fije el valor de VBoost a cero.5. Fije el valor de VBoost Sync a cero.6. Fije el valor de Sync Frecuency a 10 Hz.1. Fije el valor de Sync Delay a 2 segundos.2. Fije el valor de Accel Time a 10 segundos.3. Fije el valor de Decel Time a 10 segundos.4. Fije el valor de Inverter Rotation a FORWARD o “FWD”.5. Fije el valor de Regulator Gain a 70%.6. Fije el valor de Slip Comp a cero.7. Fije los valores de frecuencia de Frecuency Avoidance a cero.8. Fije el valor de Control Mode a la frecuencia de referencia (FR SET).9. Fije el valor de Max alowd Strts a 5.10. Fije el valor de Strts Cntr Rst a 30 minutos.11. Fije el valor de Rstrt Dly a 30 minutos.12. Fije el valor de OVERLOAD a el valor nominal del motor X la relación del transformador X
120%.13. Fije el valor de OVERLOAD SHUTDOWN DELAY a 5 segundos.14. Fije el valor de UNDERLOAD Setpoint a cero.15. Fije el valor de UNDERLOAD Shutdown Delay a 30 segundos.

92
16. Comprueba y/o fija la hora y la fecha actual.17. Si se requiere, realice los pasos en la siguiente sección FORM CAPACITORS o siga adelante
con NO-LOAD.
PARA UN ARRANQUE INICIAL O UN ARREGLO, ES RECOMENDADO QUE LA CARGA SEADESCONECTADA, Y EL VCS OPERE SIN CARGA PARA VERIFICAR LA CORRECTAOPERACIÓN.
FORMING CAPACITORS
Ejecute estos pasos solo si la unidad no ha operado dentro de 6 meses.

93
ANEXO G: START UPSi el controlador del GCS no ha sido encendido o usado en esta aplicación antes, los pasos en elAPENDICE F: CONFIGURACIÓN BÁSICA debe ser realizados antes de intentar estos pasos NO-LOAD (SIN CARGA) o START-UP .
NO LOAD SETUP (CONFIGURACION SIN CARGA)
1. Desconecte el cable del pozo de la caja de unión.2. Fije el valor de Voltage at 60Hz como fue calculado en la hoja de cálculo de arranque.3. Asegúrese que el valor de OVERLOAD es igual al valor de sobrecarga nominal del motor X la
relación del transformador X 120%.4. Asegúrese que el valor de Run ILimit iguala el valor de corriente nominal del motor X la
relación del transformador X 105%.5. Asegúrese que el valor de Sync ILimit iguala el valor nominal del motor X la relación del
transformador X 125%.6. Apague con el switch la potencia principal (Main Input Power).7. Conecte un medidor de fase a la salida de el controlador en un punto cerca de la cabeza del
pozo para confirmar la rotación correcta.8. Encienda con el switch la potencia principal (Main Input Power).9. Presione el botón START y confirme la fase correcta, después pare el controlador.10. Apague con el switch la potencia principal (Main Input Power) y desconecte el medidor de fase.
START-UP
1. Conecte el cable del pozo en la caja de unión.2. Del MAIN MENU, seleccione y muestre la pantalla de STATUS.3. Presione el botón de START y confirme que la frecuencia de salida salta hacia la velocidad
fijada o 60Hz.4. Confirme el valor correcto de voltaje en la pantalla de STATUS para que se cumpla Voltage at
60Hz.5. Fije FRECUENCY a la mínima velocidad para el arranque de la hoja de cálculo.6. Fije el punto de referencia de UNDERLOAD a 10% menos que la corriente de salida más baja
mientras corre a los Hz mínimos. Grabe esto en la hoja de cálculo de arranque.7. Fije FRECUENCY a la velocidad de operación deseada.

94
NOTA: EL PARAMETRO DE OVERLOAD (SOBRECARGA) Y UNDERLOAD (BAJO DE CARGA)pueden necesitar ser reseteados después de que el pozo se ha estabilizado.

95
ANEXO H: PESOS Y MEDIDAS

96

97

98

99

100

101

102
ANEXO I: PROTOCOLO DE SOPORTE MODBUS
1. Introducción
El GCS (Graphic Control System) soporta un subconjunto de funciones del protocolo GouldModbus en el formato RTU (o binario) como se describe en la publicación Gould PI-MBUS-300,Rev B, de fecha enero de 1985.
Este informe técnico describe la funciones soportadas y la respuesta a cada petición valida de elhost. Esto es pensado para ser usado en conjunto con las definiciones del protocolo Gould yaplicado al software del sistema controlador GCS (Graphic Control System) versión 3.00 o superior.Todos los valores numéricos mostrados en el código de funciones demandan y contestan ejemplosen formato hexadecimal (base 16), incluso cuando no están denotados con una “H”.
2. Lectura del estatus de las bobinas de salida (Output Coil) (Código de función 01)
El estado de las salidas digitales es leído por el host por medio del Código de función 01, “ReadOutput Status”. La primer bobina (coil) de este bloque refleja el estado del contactor del motor o elestado de funcionamiento (RUN) del controlador. Si el motor esta apagado (shutdown) 0200H seráfijado si se ha demandado el arranque, después 0200 H será borrado. Todos las otras bobinas desalida volverán a su estado de la misma forma.
Para un listado completo de los registros vea las tablas al final de este anexo.
2.1 Ejemplo – Código de función 01
Request:
Response:
3. Lectura del estado de las entradas (Código de función 02)
El estado de las entradas es accesado por el host por medio del Código de función 02H, “ReadInput Status”. Este estado recibe sus valores de dispositivos conectados a los canales I/O

103
disponibles o de procesos internos como alarmas, y solo puede se leído sin alteraciones por mediodel sistema o el protocolo Modbus.
Para un listado completo de los registros vea las tablas al final de este anexo.
3.1 Ejemplo – Código de función 02
Request:
Response:
4. Lectura de los registros de salida (Código de función 03)
Los registros de salida son leídos por medio del Código de función 03, “Read Output Registers”.Pueden ser obtenidos más de 125 registros por medio de solo una petición.
Para un listado completo de los registros vea las tablas al final de este anexo.
4.1 Ejemplo – Código de función 03
Request:
Response:

104
5. Lectura de los registros de entrada (Código de función 04)
Las entradas análogas son leídas por el Código de función 04, “Read Input registers”. Estosregistros reciben los valores de dispositivos conectados a los canales I/O disponibles delcontrolador del GCS y pueden solo ser leídos, y no alterados directamente dentro del controlador opor medio del protocolo Modbus. El controlador GCS permite obtener más de 125 registros pormedio de una sola petición.
Para un listado completo de los registros vea las tablas al final de este anexo.
5.1 Ejemplo – Código de función 04
Request:
Response:
6. Prefijar una sola bobina (Código de función 05)
Las salidas digitales individuales (bobinas) son modificadas por medio del host Modbus con elCódigo de función 05, “Force Single Coil”. El controlador GCS tiene solo tres salidas digitalesfísicas en la tarjeta (contactos de relee) pero varias salidas digitales virtuales son usadas paracontrolar diversos procesos en el controlador.
6.1 Ejemplo – Código de función 05
Request:

105
Response:
7. Predeterminar un solo registro (Código de función 06)
Registros de salida individuales son modificados por el host por medio del código de función 06“Preset Single Register”.
Para un listado completo de los registros vea las tablas al final de este anexo.
7.1 Ejemplo – Código de función 06
Request:
Response:
8. Escribir en múltiples bobinas (Código de función 15)
Salidas digitales múltiples son modificadas por el host en un solo mensaje por medio del Código defunción 15, “Write Multiple Coils”. El controlador GCS tiene solo tres salidas digitales físicas(Contactos de relee), pero son usadas varias salidas digitales virtuales para controlar diversosprocesos en el controlador.
Para un listado completo de los registros vea las tablas al final de este anexo.
8.1 Ejemplo – Código de función 15

106
Request:
Response:
9. Escribir múltiples registros de salida (Function Code 16)
Registro de salida múltiples son modificados por el host por medio del Código de función 16, “WriteMultiple Output Registers”.
Para un listado completo de los registros vea las tablas al final de este anexo.
9.1 Ejemplo – Código de función 16
Request:
Response:
10. Excepción / Respuesta de error
Cuando un error o una excepción sucede dentro del controlador GCS en respuesta a una peticióndel host, el envía un mensaje a el host que consiste de las direcciones esclavas, el código defunción, con el bit de orden más alto puesto en uno, un código de excepción y la palabra de

107
detección de error CRC. La siguiente tabla lista los códigos de funciones y el código respectivo deerror.
10.1 Respuesta de error del código de funciones
10.2 Código de respuesta de excepciones
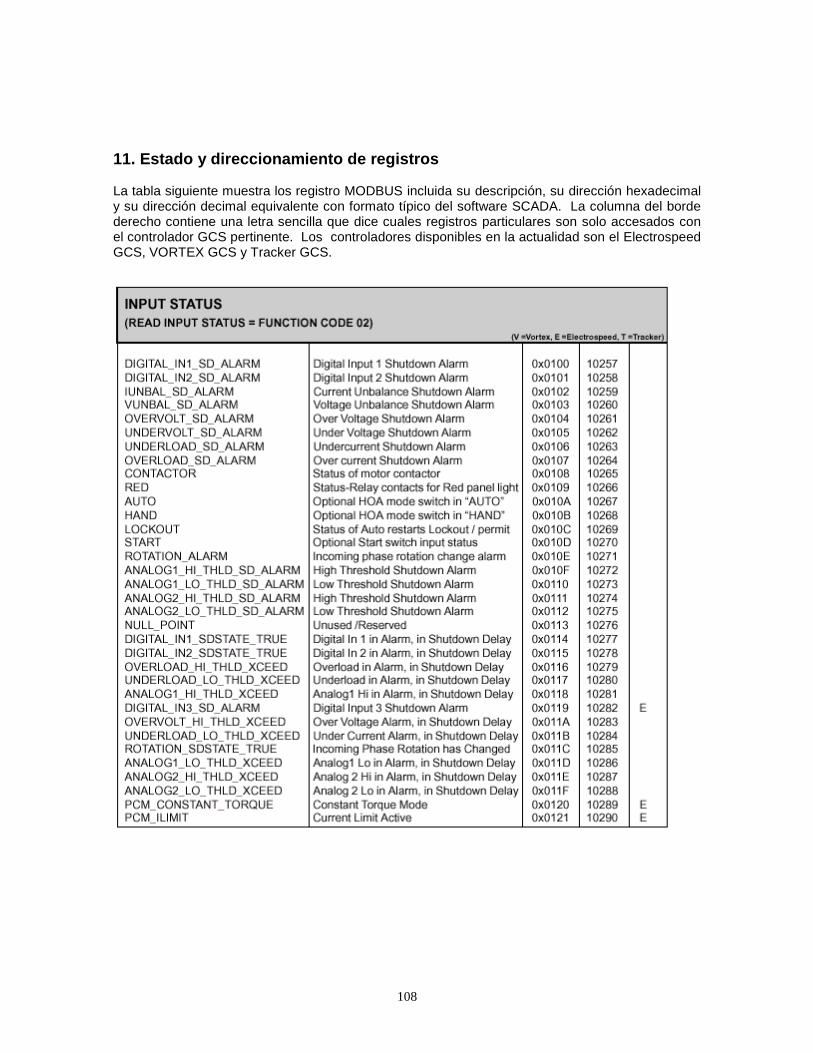
108
11. Estado y direccionamiento de registros
La tabla siguiente muestra los registro MODBUS incluida su descripción, su dirección hexadecimaly su dirección decimal equivalente con formato típico del software SCADA. La columna del bordederecho contiene una letra sencilla que dice cuales registros particulares son solo accesados conel controlador GCS pertinente. Los controladores disponibles en la actualidad son el ElectrospeedGCS, VORTEX GCS y Tracker GCS.

109
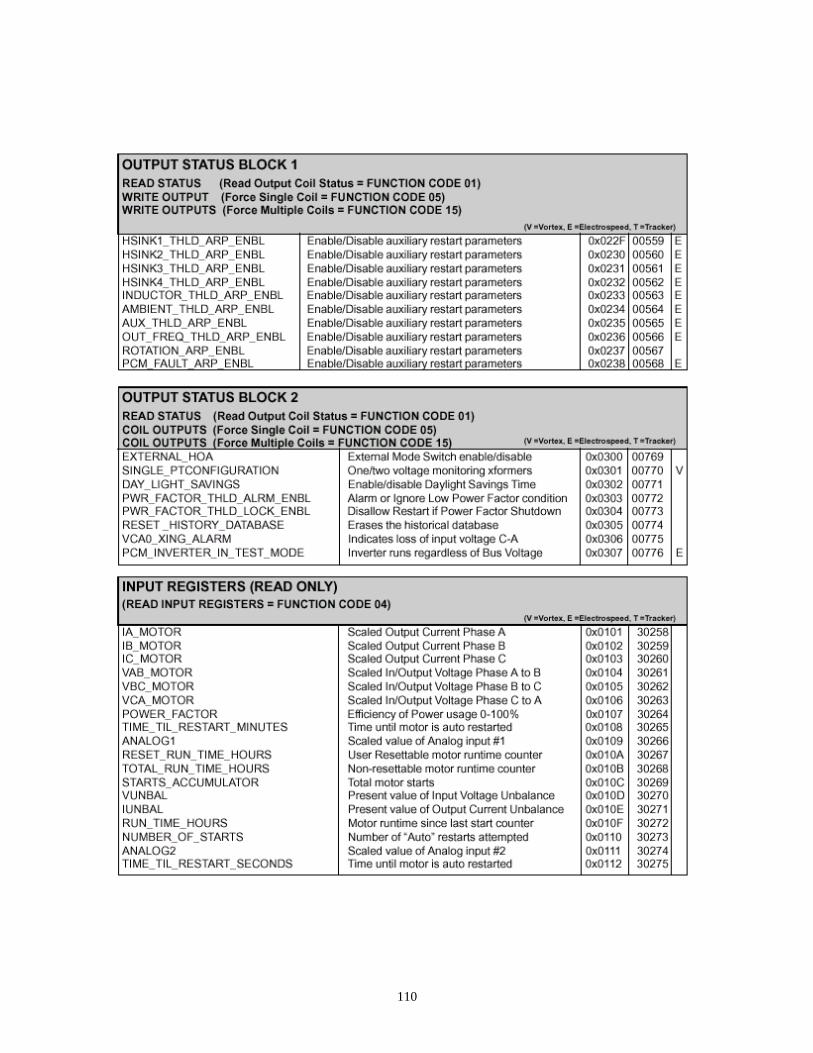
110

111
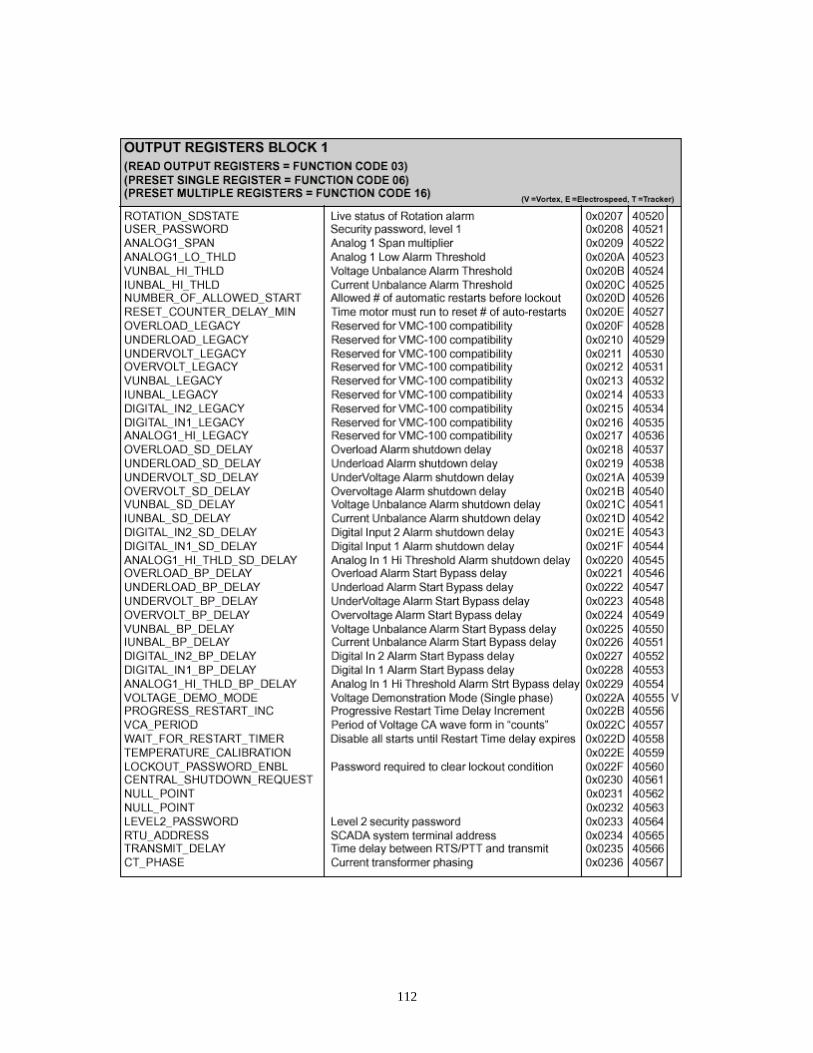
112

113

114

115

116
ANEXO J: PROGRAMACION DE PLCIntroducción
La familia de productos de control GCS permite a el usuario configurar y codificar algunos tipos dealgoritmos que no son incluidos en el producto estándar. Estas funciones se pueden consultar entérminos generales en la sección de FUNCIONES LOGICAS PROGRAMABLES. Las funciones delUPLC son todas basadas en el concepto de una estructura de base de datos de propósito generalque contiene las variables de usuario y funciones en un arreglo de base de datos apuntado en lamemoria. La estructura de esta base de datos de variables esta referida como User Points. Laprogramación y el control de cual punto de la base de datos se procesara y cuando sonadministradas por el bloque UPLC. En lo siguiente se describe la estructura de los dos UPLC, unalista de funciones disponibles con descripciones, algunas definiciones de términos y ejemplos defunciones.
User PLC Block (Bloque UPLC)
Todos los 48 bloques de control del UPLC dentro del controlador GCS tienen la misma estructurade los arreglos y contienen los mismos números y tipos de elementos. La estructura del bloque decontrol del UPLC es mostrada abajo.
User PLC_Block =
blockIdblockTypenodeRequiredflagsworkingStorageenablingPointpointIds
PointId 0
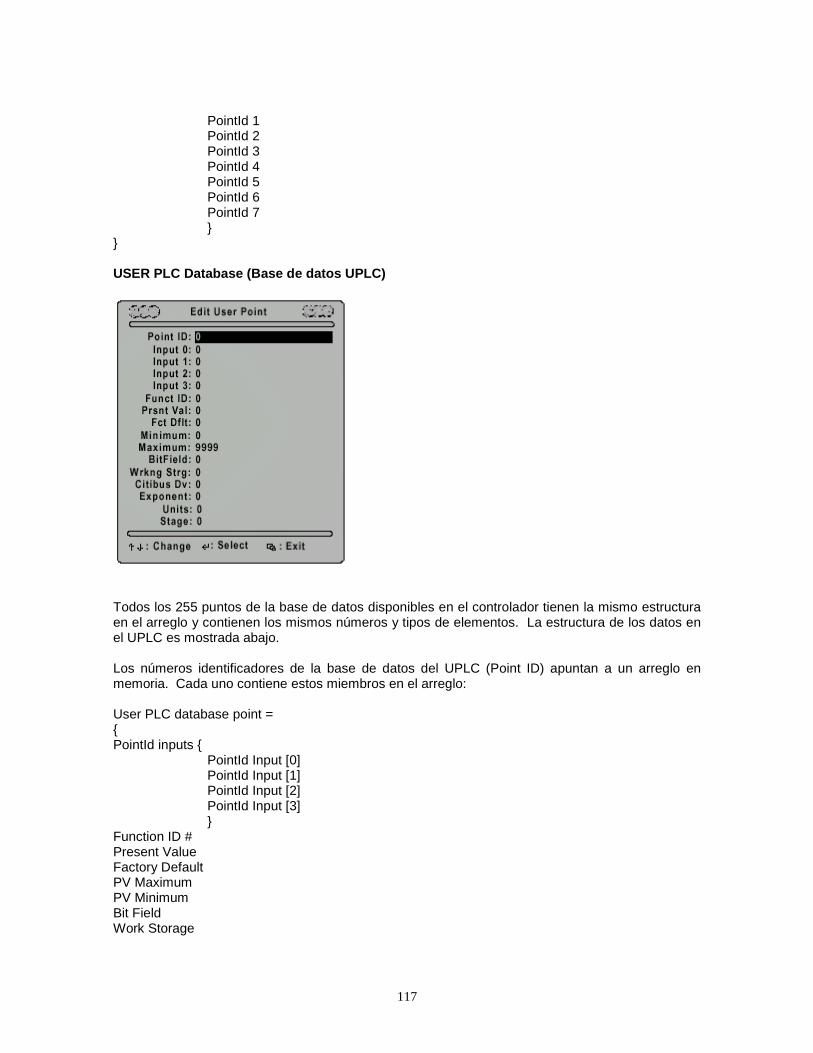
117
PointId 1PointId 2PointId 3PointId 4PointId 5PointId 6PointId 7
USER PLC Database (Base de datos UPLC)
Todos los 255 puntos de la base de datos disponibles en el controlador tienen la mismo estructuraen el arreglo y contienen los mismos números y tipos de elementos. La estructura de los datos enel UPLC es mostrada abajo.
Los números identificadores de la base de datos del UPLC (Point ID) apuntan a un arreglo enmemoria. Cada uno contiene estos miembros en el arreglo:
User PLC database point =PointId inputs
PointId Input [0]PointId Input [1]PointId Input [2]PointId Input [3]
Function ID #Present ValueFactory DefaultPV MaximumPV MinimumBit FieldWork Storage

118
Citibus DeviceExponentUnitsExecution Stage
User PLC Function Codes (Códigos de función del UPLC)
El controlador GCS tiene funciones matemáticas, booleanas y temporizadoras. Los números deidentificación de las funciones (ID) y una descripción de su configuración y operación se muestra acontinuación.
14 - AND
El valor presente en la base de datos del campo llamado Input[0] es “y-ed” con el valor presente enla base de datos del campo llamado Input[1]. El resultado es guardado en el campo de la base dedatos apuntado actualmente.
Valor apuntado actualmente = “Valor presente de Input[0]” & “Valor presente de Input [1]”
15 - AVERAGE
El valor presente en la base de datos de los cuatro campos de entrada son sumados y el valor esdividido por el número total de entradas validas. El resultado es guardado en el campo actual de labase de datos. Si menos de cuatro entradas son usadas, esta función usara solo los valorespresentes en la base de datos que no contienen caracteres nulos.
Valor actual = ((V de Input [0]) + (V de Input [1]) + (V de Input [2]) + (V de Input [3])) ———————————————————————————————
Numero de entradas no nulas
16 - COMPARE
Esta función compara el valor presente de dos datos en los campos input[0] e input[1]. Si los dosvalores son iguales, el valor presente es TRUE (1) (Verdadero). Si los dos valores no son igualesel valor presente es FALSE (0) (Falso).
Valor presente = TRUE (1) if (Valor Input[0]) == (Valor Input[1])

119
Valor presente = FALSE (0) if (Valor Input[0]) != (Valor Input[1])
17 - COPY PRESENT VALUE
Esta función copia el valor del campo input[0] en el valor del campo input [1].
Valor Input[1] = Valor Input[0]
18 - CHECK ALARM
No disponible en esta versión
19 - HIGH THRESHOLD
Esta función de umbral alto acepta dos valores de entradas análogas en la base de datos cuyoscampos son llamados input[0] e input[1] y los compara. Input[0] es el valor e input[1] es el umbral
If input[0]<= input[1] el umbral no se ha excedido, Valor presente == FALSE.If input[0]> input[1] el umbral se ha excedido, Valor presente == TRUE.
20 - LOW THRESHOLD
Esta función de umbral bajo acepta dos valores de entradas análogas en la base de datos cuyoscampos son llamados input[0] e input[1] y los compara. Input[0] es el valor e input[1] es el umbral
If input[0]<= input[1] el umbral no se ha excedido, Valor presente == FALSE.If input[0]> input[1] el umbral se ha excedido, Valor presente == TRUE.
21 - MAXIMUM
Esta función compara el valor en la base de datos de los campos llamados input[ ] y copia el valormás grande en el campo del valor apuntado actualmente.
Valor presente = El más grande de input[0], input[1], input[2] e input[3]
22 - MINIMUM
Esta función compara el valor en la base de datos de los campos llamados input[ ] y copia el valormás pequeño en el campo del valor apuntado actualmente.
Valor presente = El más pequeño de input[0], input[1], input[2] e input[3]
23 - TIMER
No disponible en esta versión.
24 - TIMER CHECK
No disponible en esta versión.
25 - HOLDBACK TIMER CHECK
No disponible en esta versión.
120
26 - OUT OF BAND
Esta función compara el valor en la base de datos del campo input[0] con el limite de umbral bajoen input[1] y con el limite de umbral alto en input[2]. Si alguno de estos umbrales es excedido, elvalor apuntado actualmente se pone en TRUE (1) si no se pone FALSE (0).
If VP de input[0] < input[1] o input[0] > input[2] el valor apuntado == TRUEIf VP de input[0] => input[1] o input[0] <= input[2] el valor apuntado == FALSE
27 - ONE SHOT TIMER
No disponible en esta versión.
28 - INVERTER
Esta función lee el valor en la base de datos del campo input[0] y fija el valor apuntadoactualmente a el valor invertido de input[0].
If VP de Input[0] == 0, entonces el VP del valor apuntado == 1If VP de Input[0] == 1, entonces el VP del valor apuntado == 0
29 - PULSE GENERATOR
No disponible en esta versión.
30 - IF THEN ELSE
Esta función condicional permite a el usuario ejecutar un set de instrucciones si la condición esverdadera u otro set diferente de instrucciones si la condición es falsa.
La función acepta cuatro entradas que son definidas como:input[0] = point ID del primer valor a comparar.input[1] = point ID del segundo valor a comparar.input[2] = User PLC Block ID. Bloque del PLC que se ejecuta si la condición es TRUE(verdadera).input[3] = User PLC Block ID. Bloque del PLC que se ejecuta si la condición es FALSE(falsa).
If VP de input[0] = input[1] entonces se activa el bloque del PLC Block ID identificado en el VP
de input[2], desactivando el bloque del PLC Block ID identificado en el VP de input[3].
If VP de input[0] != input[1] entonces se activa el bloque del PLC Block ID identificado en el VP
de input[3], desactivando el bloque del PLC Block ID identificado en el VP de input[2].
31 - ADD
Esta función aritmética sumara los valores en la base de datos identificados por input[0] e input[1].El resultado es guardado en punto actual. Todos los valores son enteros.
Valor presente = ( VP de input[0] ) + ( VP de input[1] )

121
32 - SUBTRACT
Esta función aritmética restara los valores en la base de datos identificados por input[0] e input[1].El resultado es guardado en el punto actual. Todos los valores son enteros.
Valor presente = ( VP de input[0] ) – ( VP de input[1] )
Cuando el resultado es negativo, el valor pasara a 9999
33 - MULTIPLY
Esta función aritmética multiplicara los valores en la base de datos identificados por input[0] einput[1]. El resultado es guardado en el punto actual. Todos los valores son enteros.
Valor presente = ( VP de input[0] ) * ( VP de input[1] )
El máximo resultado es 9999
34 - DIVIDE
Esta función aritmética divide el valor en la base de datos identificados por input[0] con el valor eninput[1]. El resultado es guardado en el punto actual. Todos los valores son enteros.
Valor presente = ( VP de input[0] ) / ( VP de input[1] )
35 - SQUARE ROOT
Esta función dará la raíz cuadrada del valor presente en la base de datos identificada con input[0].El resultado es guardado en el valor apuntado actualmente. Todos los valores y resultados sonenteros
Valor presente = raíz Cuadrada (VP de input[0] )
36 - OR
Esta función hará un OR lógico hasta con cuatro entradas identificadas por input[0], input[1],input[2], input[3]. El resultado es guardado en el punto actual de la base de datos.
Valor presente = (VP de input[0]) or (VP de input[1]) or (VP de input[2]) or (VP de input[3])
37 - USER CONTROL FUNCTION
No disponible en esta versión.
38 - LATCH FUNCTION
No disponible en esta versión.
User Point Bitfield Codes
La variable tipo Bit contenida en la base de datos puede fijar las siguientes definiciones.
READ_ONLY El valor presente es solo de lectura. Por ejemplo no puede ser alterada pormedio del display.

122
#define READ_ONLY ((unsigned short)0x0001)
DISCRETE El valor presente es discreto (on/off o true/false)#define DISCRETE ((unsigned short)0x0002)
MAY_BE_LOGGED El punto puede ser registrado a una tarjera de PC sobre el display.#define MAY_BE_LOGGED ((unsigned short)0x0004)
REVERSE El valor discreto es invertido.#define REVERSE ((unsigned short)0x0008)
MAX_IS_POINT El valor máximo es definido por el valor guardado en Point.maximum.id.De otra manera el valor máximo es guardado en Point.maximum.value.#define MAX_IS_POINT ((unsigned short)0x0010)
MIN_IS_POINT El valor mínimo es definido por el valor guardado en Point.minimum.id. Deotra manera el valor mínimo es guardado en Point.minimum.value.#define MIN_IS_POINT ((unsigned short)0x0020)#define NORMAL_STATE ((unsigned short)0x0040)
SETPOINT La copia FLASH de la base de datos debería ser actualizada.#define SETPOINT ((unsigned short)0x0080)
NOTIFY_REMOTE_ON_CHANGE Cambia el valor presente del punto que debería serenviado a el modulo CITIBus especifico del campo del dispositivo CITIBus.#define NOTIFY_REMOTE_ON_CHANGE ((unsigned short)0x0100)
PRESENT_VALUE_IS_SCALED Valor de compensación en el valor presente que semultiplicara por 10** el número en el exponente decimal de compensación 3.#define PRESENT_VALUE_IS_SCALED ((unsigned short)0x0200)
ACCESS_CONTROL_BIT1
ACCESS_CONTROL_BIT2Dos campos que indican que nivel de seguridad el usuario tiene para cambiar el valor presente. Aplicado normalmentea los puntos de referencia (Setpoints).
#define ACCESS_CONTROL_BIT1 ((unsigned short)0x0400)#define ACCESS_CONTROL_BIT2 ((unsigned short)0x0800)
SKIP_EVENT_LOGGING Cambia a los puntos no escritos en eventos donde se graba elbuffer#define SKIP_EVENT_LOGGING ((unsigned short)0x1000)
ADD_POINT_TO_ALARM_LIST El Point ID es adicionado a la lista de causas de alarma.#define ADD_POINT_TO_ALARM_LIST ((unsigned short)0x2000)
REMOTE_UPDATE_PENDING El intercambio del valor presente cambiado esta enprogreso. Este bit es puesto a 1/0 dinámicamente.#define REMOTE_UPDATE_PENDING ((unsigned short)0x8000)
Ejemplos de algoritmos del User PLC

123
Arranque remoto por medio de una entrada digital en el modulo de I/O
Este rutina del UPLC usara una entrada digital del modulo de expansión I/O como switche dearranque remoto. Para usar el algoritmo, entre estos datos en el bloque User PLC 0, En el punto 0y 1.
Para usar un modulo de I/O o entrada digital diferente, sustituya input0: valor (665) del User Point 0con uno de los valores siguientes:
Parada de emergencia remota por medio de una entrada digital en el modulo de I/O
Este ejemplo de rutina del UPLC usara una entrada digital de un modulo de expansión I/O comopara de emergencia remota. Para usar este algoritmo, entre los datos de estas tablas en losbloquea User PLC 0, 1 & 2 , y los puntos en User Points 0, 1, 2, 3 y 4.
If IO1DI1 =1, fija PCM Stop Mode con el comando E-Stop & issue Central Shutdown.If IO1DI1 =0, fija PCM Stop Mode con el comando Coast & clear Central Shutdown.

124

125
ANEXO K: USO DE LA PCMCIA CARD
IntroducciónLa línea de productos de GCS de Centrilift proporciona registros de datos históricos útiles para elusuario. Esta información histórica ayudara a diagnosticar problemas en el equipo, extenderá lavida útil de y analizara los datos de producción. Muchos tipos de información histórica estándisponibles:
• Un registro de historia de eventos almacena todos los eventos del sistema como encendido,parámetros cambiados y alarmas.
• Estos eventos con la hora y fecha del momento ocurrido, con un registro de valores deparámetros antes y después.
• El historial de shutdown almacena la causa y fecha de los últimos 99 shutdowns.• Una carta amperimétrica fase B digital que muestra los registros corriente cada 100 ms,
además del dato mínimo, el máximo y promedio, cada cuatro minutos; reemplaza la cartaamperimétrica de papel standard y asegura que los datos de los últimos 7 días esténdisponibles.
• En la tarjeta de distribución del Electrostart funciona una unidad Vortex, al arranque una formade onda detalla las tres voltajes y corrientes de las fases. Los primeros dos segundos delarranque se hace un muestreo a razón de 600 datos por segundo, produciendo una forma deonda informativa para análisis de problemas y solución de estos.
• Permite registrar datos bajo mas de 12 parámetros de sistemas diferentes (voltios, amps, I/O,frequency) tan rápido como a uno por segundo con el uso de externa PC Card ATA flash disks.
Para facilitar la transferencia y registro de datos de esta información histórica, el GCS incorpora uncard slot. El slot para PCMCIA acepta tarjetas de tipo I o II PC Card ATA Flash cards.Corrientemente de 8 Megabyte ATA PC Cards de dos diferentes fabricantes han sido aprobadospara su uso. Otras tamaños y marcas están comenzado a ser probadas para evaluar sucompatibilidad y confiabilidad.El parte numero de diseño de Centrilift es 900608, la aprobada 8MB PC Card ATA flash card, conespecificaciones industriales (-40 to +85 operación).
II. Insertar la PC Card dentro del Display Grafico
a. OrientaciónEl slot de la PC Card esta localizado en la parte superior derecha del Graphic Display. (Ver abajo).Este modelo de producción inicial de la tarjeta del display tiene un slot el cual requiere la PC Cardpara ser insertada al revés al frente del display. La mayoría de los modelos de producción en estaversión tendrán una marca debajo del PC Card slot que indica esto. La ultima versión deproducción de la unidad de display grafico requiere que la PC Card sea insertada del lado derecho.En cualquiera de los dos casos, el slot de la PC Card es limitado cuando se intenta introducir untarjeta incorrectamente, esta solo se desliza alrededor de ¾ del tamaño dentro del slot. En lainstalación correcta, la tarjeta se deslizara dentro del slot y requerirá solo un pequeña fuerza paracompletar la inserción electrónica.
NOTA: Si se introduce la PC Card con excesiva fuerza, PODRIA quedar instalada incorrectamente.
b. Reconocimiento de la PC Card en el Display GraficoUna vez la PC Card es instalada dentro del display, un cuadro de dialogo aparece indicando que lainserción de una PC Card fue reconocida, y el software probara la tarjeta para compatibilidad y

126
confiabilidad. Si la prueba de la PC Card esta bien, la caja de dialogo se cerrara. En este punto laPC Card esta lista para su uso, como se describe en la sección III & IV.
Si el usuario previamente ha habilitado las características de Datalogging, un segundo dialogoindicara el comienzo del registro de datos. Esta caja de dialogo se cerrara automáticamente.
Si cualquier problema existe con la tarjeta, un mensaje de error se mostrara. Consulte la sección VITroubleshooting, para explicaciones de mensajes de error.
c. Accessing PC Card featuresLas características de la PC Card son disponibles en la pantalla de PC Card Status. Los pasospara tener acceso a esta pantalla son:
1. arranque en el menú principal. Si este menú no se muestra, simplemente, presione la tecla“MENU” varias veces hasta que el menú principal se muestre.2. Usando las teclas de las flechas, mueva el cursos hasta el menú de ‘Datalog & History’ ypresione ENTER.3. La pantalla mostrada una de varias, pero normalmente es “Shutdown History”.4. Oprima las flechas LEFT 2 veces. La pantalla mostrada será la de PC Card STATUS. (si ustedoriginalmente no esta viendo el menú de ‘Shutdown History”, oprima la tecla ‘menú’ hasta que lapantalla de PC Card STATUS se muestre)
III. Escribir la data histórica a la PC Card

127
Todos los datos históricos pueden ser almacenados como archivos de la PC Card para análisis enel computador. La información es almacenada como una archivo de Comma Separated Variable(CSV). Este es simplemente una archive de prueba ASCII formateado con comas entre los dato deun registro. Este método de almacenamiento fue escogido para evitar cualquier propiedad deestructuras de archivos que necesite un controlador especial o software para interpolación para serleído. Adicionalmente, estos archivos CSV son reconocidos por la mayoría de programa de manejode datos (Lotus, Excel, Quattro etc.) y son automáticamente convertidos a tabla cuando soncargados.
NOTA: La función de Datalogging del display GCS debe ser deshabilitada (Ver sección IV) paraejecutar las siguientes tareas:
a. Acceder a “Other PC Cards Screen”Para guardar el historial de bases de datos a la PC Card, el usuario debe usar la pantalla de “OtherPC Card Functions”. De la pantalla de PC Card STATUS (ver II - C encima), use las flechas paraque ilumine y selecciones la opción de “Other PC Card Functions”.b. Guardar la Historia de los Shutdown a la PC CardLas causas de los últimos 99 shutdowns con fecha y hora pueden ser guardados a la PC Cardseleccionando la opción de Shutdown History en la pantalla de Other PC Card Functions. Estacreara un archivo tipo CSV llamado ‘SDHIST.CSV’ sobre la PC Card.c. Guardar Historial de Eventos a la PC CardLa lista de los 255 mas recientes eventos del sistema, incluyendo la data y fecha y hora pueden serguardada en la PC Card seleccionando la opción de Event History sobre la pantalla de Other PCCard Functions. Este creara un archivo tipo CSV llamado EVENTS.CSV sobre la PC Card.d. Guardar Carta amperimétrica Digital de la Fase B a la PC CardEsta Carta amperimétrica Digital de la Fase B representa elamperaje de la fase B grabado para la ultima semana de trabajo,incluyendo la data y fecha, puede ser guardado en la PC Card seleccionando la opción de Phase BAmpchart en la pantalla de Other PC Card Functions. Esta creara un archivo tipo CSV llamadoAMPCHART.CSV en la PC Card. Este es un archivo grande y tomara mas de 1 minuto para que seguarde completamente en el disco.e. Guardar la ultima Forma de Onda de Arranque a la PC CardPara la tarjeta de distribución con la que el GCS VORTEX cuenta, la opción Startup Trendaparecerá en el menú de Other PC Card. Seleccionando esta opción causara 1200 registros dedatos para los voltajes y amperajes en las 3 fases, para ser grabados en la PC Card. El nombre deeste archivo será STARTUP.CSV. este podrá tomar alrededor de 30 segundos o mas para creareste archivo.En todos los casos arriba mencionados, una ventana se abre cuando el proceso de transcripciónde los datos comienza indicando el progreso en la operación. Cuando este dialogo se cierra, elarchivo ha sido grabado a la PC Card, y se puede remover la tarjeta del slot.

128
IV. configuración y Registro de Datos Habilitado
Las disponibilidades de registro de datos de los productos del GCS, se diseñan para permitir largosperiodos de tendencia histórica de datos operacionales. Un total de 12 parámetros pueden serregistrados a muestreo variable. La máxima velocidad de muestreo es de 1 registro por segundo.La data es almacenada a la PC Card ATA flash disk, usando el display del GCS. El numero demuestras disponibles almacenadas, es limitada solo por el espacio en el disco.
a. Cuánto puede la PC Card registrar datos antes de llenarse?La PC Card tiene para una capacidad de inventariar 8 megabytes (MB) de tamaño. Una card de 8MB tiene normalmente 7,956,480 bytes (a.k.a. caracteres) disponibles para usar después de que eldisco sea formateado. Nosotros probamos las PC Card arriba de 32 MB pero no son disponiblespara su uso todavía. Cada muestra usa 33 bytes (caracteres) de espacio. Como el tiempo entre lasmuestras decrece, la data de las tarjetas se llenara rápidamente. Típicamente los el tiempoesperado para manejar la transmisión de datos es de 1 minuto a 1 hora.
Algunos cálculos de muestra de espacio en la memoria usada puede ser la siguiente:
Ejemplo #1 - 12 muestreo de parámetros una vez cada horaCada hora usaría 33 bytes x 12 muestras = 396 bytesCada día usaría 396 * 24 = 9504podría tomar muestras durante 7956480 / 9504 = 837 días.
Ejemplo #2 - 6 muestreo de parámetros cada minuto:Cada hora usaría 60 * 33 * 6 = 11880 bytes.Cada día usaría 11880 * 24 = 285120podría tomar muestras durante 7956480 / 276480 = 28 días.
Ejemplo #3 - 3 muestreo de parámetros cada segundo:Cada segundo usaría 33 * 3 bytes usa = 99 bytes.Cada hora usaría 99 * 3600 = 356400podría tomar muestras durante 7956480 / 345600 = 22 horas.
b. configuración de los parámetros a ser RegistradosLa configuración de los parámetros a ser registrados y el intervalo entre las muestras es manejadaen el menú Datalog Setup. A esta pantalla se accede seleccionando la opción de SetupDatalogging del menú PC Card Status. (Ver sección IIc)NOTA: La configuración de pantalla de Datalogging no se puede acceder mientras un registro dedatos este en progreso.Asegúrese de que datalogging este deshabilitado antes de intentar el acceso a esta pantalla.La pantalla de Setup Datalogging es ordenado en columnas:
descripción – Es en donde el parámetro de sistema a ser registrado se selecciona y la descripcióndel este se localizada.Para seleccionar un parámetro deseado, posicione el cursor en la columna de Description a la filadeseada y oprima ENTER. Si el parámetro deseado en la lista no se selecciono, la descripciónpara ejecutara el primer parámetro disponible. Usando las flechas de abajo y arriba, desplace elcursor a través de la lista de parámetros disponibles hasta que el parámetro deseado se encuentre.Entonces oprima ENTER de nuevo para salvar el parámetro registrado.

129
Start Time – Esta columna es reservada para futuros desarrollos.
Interval Time – Esta columna es donde el tiempo (en segundos) entre muestras se introduce. Unavez el parámetro deseado ha sido escogido por encima, la posición del cursor en la columna deInterval Time para la fila de parámetro seleccionada. Entonces oprima ENTER para editar eltiempo. Inicialmente la parte baja de la pantalla indicara ‘Not Configured’. El tiempo se mete ensegundos de 0 a 9999. Una vez el tiempo deseado en segundo se mete usando las flechas, oprimaENTER para salvar el valor. Note que el intervalo de tiempo, en horas, minutos, segundos semuestra al final de la pantalla.
Enable – Esta columna indica cuando el parámetro del sistema seleccionado es corrientementehabilitado para registrarse o no. Una vez el parámetro ha sido seleccionado en la columna 1 y unintervalo de muestra deseada ha sido introducida en la columna 3, el parámetro debe habilitarsepara registrar la data. Esto se ejecuta posicionando el cursor sobre la columna Enable para la filadeseada y presione ENTER para editar la condición del registro del parámetro. Usando las flechas,configure enabled or disabled. Entonces oprima ENTER para acceder el cambio.
c. Enable / Disable data loggingUna vez el parámetro de sistema sea registrado y configurado, el usuario necesita solo insertar unaATA PC Card valida dentro del slot de la PC Card y seleccionar el parámetro Enable Dataloggingdel menú de PC Card Status.Si la PC Card es valida y la configuración del parámetro es correcto, un cuadro de dialogo indicaque el datalogging empieza.La característica de PC Card datalogging es diseñada para rearrancar automáticamente si unafalla de poder ocurre. Una vez el datalogging esta habilitado, este continuaría hasta que el usuariodeshabilite el logging o la PC Card se llene, en este caso el datalogging seria automáticamentedeshabilitado.
d. Disabling datalogging / removing the PC CardPara remover la PC Card el usuario debe deshabilitar la característica de datalogging en el menúde PC Card Status. Si la PC Card se remueve sin deshabilitar el datalogging, un cuadro de dialogode precaución se enunciara indicando que se perdió información o que el archivo se dañe, estopuede ocurrir si la tarjeta no es reinsertada.
V. Usando la PC Card bajo Windows 95/98 PC
La PC Card ATA Flash disk se apoya automáticamente por la instalación stardard del Windows 95& 98. Cuando la PC Card se inserta dentro de una PC con slot PCMCIA, el sistema reconoce elFlash disk como otro sistema de disco duro de 8 Mb de tamaño. Este formato de PC Card fueescogido para permitir que la mayoría de bases ampliamente instalada de sistemas decomputadores trabajen sin ningún problema con la data de los productos de GCS.

130
a. Inserte la PC Card en un slot laptop PCMCIA.Cuando la PC Card es insertada dentro de un slot PCMCIA del computador por primera vez,Windows automáticamente lo detectara la PC Card y cargara el apropiado controlador para utilizarcon el flash disk. Dependiendo del fabricante de la PC Card, una pantalla similar se presenta igualque cuando Windows prepara una tarjeta para que su sistema utilice.Las siguientes instrucciones se indican para que se complete la instalación de la PC Card IDE conel controlador bajo Windows.(Requerirá computador para ser arrancado). Una vez el controlador carga el proceso finaliza, la PCCard Flash debe aparecer en la lista de dispositivos en el explorador de Windows. (ver siguiente)
b. Abrir Explorador de Windows para ver el contenido de la PC Card\En la mayoría de los computadores con Windows, existe un icono que se llama My Computer, en laparte superior izquierda del escritorio. Este icono permite mostrar los datos sobre dispositivos dealmacenamiento que están disponibles en el sistema de computador. Seleccione este icono(normalmente con una acción de doble click) abrirá una ventana similar a la que aparece abajo. Enesta lista de discos locales, debe haber un nuevo drive de tamaño 7.57 MB (unas 8 MB formateadoel disco duro).

131
c. Trabajando con archivos de PC CardEl nuevo drive del computador (en este cado drive D:) puede ser accedido así como cualquier discoduro o disco de 3 ¼. Los archivos pueden ser copiados a o del drive, o abrir los archivos del drive.Los archivos que deben aparecer son:1. log.csv – archivo de salida de datalog2. sdhist.csv – archivo de historia de shutdown3. ampchart.csv – archivo de carta amperimétrica digital Fase B4. events.csv – archivo de historial de eventos5. trends.csv – archivo de tendencia de alta velocidad al arranque (Vortex GCS únicamente)Una información mas detallada de los contenidos de estos archivos es discutida en la sección III. Elformato CSV es muy versátil. Como resultado, si el computador tiene un programa de trabajo enhojas de calculo instalado (Excel, Lotus, Quatro, etc.) el usuario necesita solo seleccionar uno deestos archivos y tabular la información a ser importada dentro de forma de hoja de calculo. Estosarchivos son simples ASCII, los cuales pueden ser leídos y editados con la mayoría de utilidadesde editor de textos.El archivo de salida de Datalog (log.csv) aparecerá similarmente a la grafica mostrada.
Los campos descritos para cada registro son: (izquierda a derecha)
Parameter ID, Valor, fecha, tiempo, estado de campo
El parámetro ID field es un numero representando el parámetro que fue registrado. El uso de unnumero de identificación evita que el disco guarde la información continuamente a un archivoextenso. El parámetro descripción puede ser decodificado usando la tabla de la siguiente pagina.La condición del campo principalmente contiene un carácter singular ‘S’ para indicar que el registrode datos fue ‘STARTED’ en esta muestra.Note que cuando muchos parámetro son seleccionados, las muestras se mezclan unas con otras.Ordenado el archivo sobre la primera columna permitirá que cada configuración de datos para elparámetro especifico se aísla y se grafica.
identificación de puntos descritos para parámetros que pueden ser registrados en dispositivos GCS:

132
Un ejemplo de un archivo de historial de shutdown que fue cargado en Excel se muestra debajo:

133
Note que la primera columna indica el tipo de data para cada columna.La segunda ilustración, es un archivo de registros de este disco.
Finalmente, un ejemplo de historia de tendencia al arranque, el cual es cargado y graficado usandoel cuadro de ayuda de gráficos de Excel:
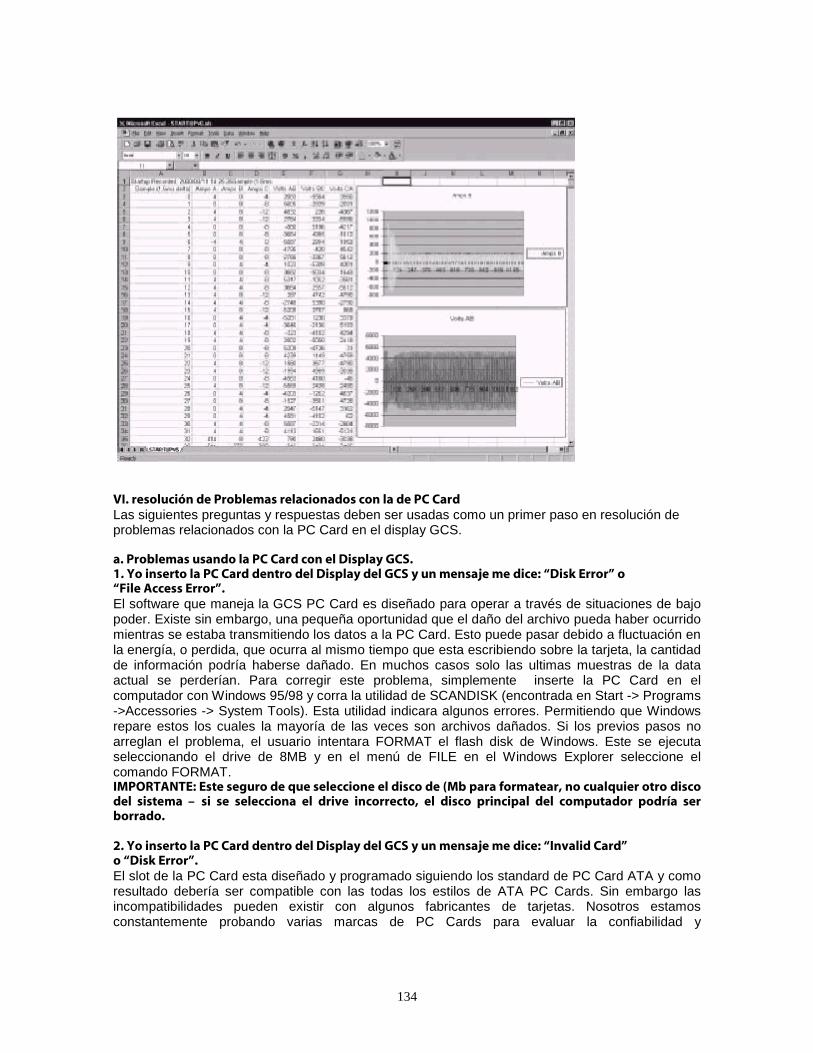
134
VI. resolución de Problemas relacionados con la de PC CardLas siguientes preguntas y respuestas deben ser usadas como un primer paso en resolución deproblemas relacionados con la PC Card en el display GCS.
a. Problemas usando la PC Card con el Display GCS.1. Yo inserto la PC Card dentro del Display del GCS y un mensaje me dice: “Disk Error” o“File Access Error”.El software que maneja la GCS PC Card es diseñado para operar a través de situaciones de bajopoder. Existe sin embargo, una pequeña oportunidad que el daño del archivo pueda haber ocurridomientras se estaba transmitiendo los datos a la PC Card. Esto puede pasar debido a fluctuación enla energía, o perdida, que ocurra al mismo tiempo que esta escribiendo sobre la tarjeta, la cantidadde información podría haberse dañado. En muchos casos solo las ultimas muestras de la dataactual se perderían. Para corregir este problema, simplemente inserte la PC Card en elcomputador con Windows 95/98 y corra la utilidad de SCANDISK (encontrada en Start -> Programs->Accessories -> System Tools). Esta utilidad indicara algunos errores. Permitiendo que Windowsrepare estos los cuales la mayoría de las veces son archivos dañados. Si los previos pasos noarreglan el problema, el usuario intentara FORMAT el flash disk de Windows. Este se ejecutaseleccionando el drive de 8MB y en el menú de FILE en el Windows Explorer seleccione elcomando FORMAT.IMPORTANTE: Este seguro de que seleccione el disco de (Mb para formatear, no cualquier otro discodel sistema – si se selecciona el drive incorrecto, el disco principal del computador podría serborrado.
2. Yo inserto la PC Card dentro del Display del GCS y un mensaje me dice: “Invalid Card”o “Disk Error”.El slot de la PC Card esta diseñado y programado siguiendo los standard de PC Card ATA y comoresultado debería ser compatible con las todas los estilos de ATA PC Cards. Sin embargo lasincompatibilidades pueden existir con algunos fabricantes de tarjetas. Nosotros estamosconstantemente probando varias marcas de PC Cards para evaluar la confiabilidad y

135
compatibilidad. Si la PC Card en uso muestra estos tipo s de error, existe un problema decompatibilidad. Por favor reporte esto al fabricante, Tipo, Parte numero, y tamaño al Control detecnologías de Centrilift para investigación. Alternativamente, la PC Card en cuestión podríadañarse o requerir ser reformateada. Ver la respuesta abajo para reformatear la tarjeta.
b. Problemas usando la PC Card con Windows PC.1. Cuando yo inserto mi PC Card Flash Disk en el slot de mi computador, no aparece un nuevo driveen este en el Windows Explorer. Porque no?Muchos nuevos sistemas de computadores tienen casi todas las Interrupt Request Lines (IRQ’s)usadas con varios hardware como tarjetas de sonido, controladores de CD-rom, puertos decomunicación, puertos paralelos, puertos USB, etc. Cuando la PC Card ATA Flash disk esinsertada, esta requiere un IRQ para ejecutar la transmisión de la data al procesador delcomputador. Solo hay un numero limitado de IRQ disponibles en un computador. Si todos ellos sonutilizados cuando la PC Card es insertada, Windows no podrá reconocerla para adicionarla comoun nuevo drive del sistema. Esto puede solucionarse removiendo cualquier otra de las PC Cardsque se insertan, como modems o adapter LAN. Consulte servicio de información local para otrasformas de liberar un sistema de IRQ.2. Cuando intento de abrir el archivo “log.csv”, mi software de hoja de calculo me muestra uncuadro de dialogo que me indica que los archivos no han sido cargados. Que significa esto?La mayoría de los paquetes de Hojas de calculo tienen limitaciones en el máximo numero de filasque pueden maneja. Cuando el software abre el archivo CSV,”log file”, este archivo puede contenermas de 250,000 filas. En estos casos el software no cargara el archivo debido a la cantidad de filasde la data, esto implica una limitación propia del software, y entonces puede presentarse algúnindicando que no todas las filas del archivo fueron cargadas. Microsoft Excel 95 tiene un limite de16,383 filas, y Excel 97 tiene un limite de 65,535 filas. En casos donde el registro tiene muchas filaspara cargar, es necesario utilizar un editor de texto como el Wordpad (parte de los accesorios deWindows 95/98) para copiar solo las líneas de texto que se puedan manejar en la hoja de calculode programa.
3. Cuando yo trato de abrir uno de los archivos CSV sobre la PC Card, me sale un error que me indicaque el archivo no puede ser abierto por que se encuentra en una condición de “read only” (sololectura).Este error ocurre en algunos envíos iniciales de PC Cards de productos de memoria AVED. Estopuede ser causado por un formato invalido DOS sobre los discos, resultando un daño extremo. Lasolución es reformatear la PC Card en Windows 95/98 la cual corregirá la estructura del archivo yarchivos de inicio. Este procedimiento se ejecuto seleccionando e disco de 8MB del WindowsExplorer y seleccionando del menú FILE el comando FORMAT.IMPORTANTE: Asegúrese de que el disco seccionado para formatear es el de 8MB flash disk, nocualquier otro del sistema. Si se selecciona el drive incorrecto, podría borrarse el disco principal delcomputador.NOTA: Formateando la PC Card resultara se perderá toda la data que fue registrada en latarjeta. Si existe una información crítica en la tarjeta, se puede recuperar con utilidades especiales.Por favor use la información para contactar uno de nuestros personal de apoyo.Si estos pasos no proporcionan una solución, contacte “Centrilift Control Technologies Group”. Porfavor tenga la siguiente información lista para facilitar la solución de problemas:1. Las versiones de software que se encuentran en los dispositivos GCS, localizados en el menúde System, Scada & Security en el submenú de Software Rev Num.2. El nombre del fabricante de la PC Card, tipo, parte numero y tamaño.3. Una lista de los síntomas de los mensajes de error mostrados en el display.