
T E S I S · 3 Índice OBJETIVO: ..... 5 PREFACIO ..... 6
100
1 INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA MÉXICO, D.F. 2009 TESIS QUE PARA OBTENER EL TITULO DE: P R E S E N T A : JOSÉ ODILÓN SANTOS CARRILLO INGENIERO EN COMUNICACIONES Y ELECTRÓNICA “SISTEMA DE CONTROL ELECTRÓNICO DE Y ESTERILIZACIÓN, DE AGUA” PH
Transcript of T E S I S · 3 Índice OBJETIVO: ..... 5 PREFACIO ..... 6

1
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍAMECÁNICA Y ELÉCTRICA
MÉXICO, D.F. 2009
T E S I S
QUE PARA OBTENER EL TITULO DE:
P R E S E N T A :
JOSÉ ODILÓN SANTOS CARRILLO
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
“SISTEMA DE CONTROL ELECTRÓNICO DE Y
ESTERILIZACIÓN, DE AGUA”
PH

2

3
Índice
OBJETIVO: ...................................................................................................................... 5
PREFACIO ....................................................................................................................... 6
INTRODUCCIÓN ............................................................................................................ 9
EVOLUCIÓN DE LAS TÉCNICAS DE CONTROL ..................................................... 9
PRINCIPIOS BÁSICOS DE DISEÑO DE SISTEMAS DE CONTROL ........................ 9
Teoría de Control Moderna Versus Teoría de Control Clásico. ............................... 9
Modelo Matemático. ............................................................................................... 10
Análisis de un Sistema de Control .......................................................................... 10
Neutralización ......................................................................................................... 11
Especificaciones técnicas del pHmetro profesional HI-98240 .............................. 12
NORMA OFICIAL MEXICANA .......................................................................... 12
PLANTEAMIENTO DEL PROBLEMA ....................................................................... 13
VENTAJAS DE LA RADIACION ULTRAVIOLETA FRENTE A OTROS
SISTEMAS ..................................................................................................................... 15
USO DOMÉSTICO ................................................................................................ 15
MARCO TEÓRICO ....................................................................................................... 20
Sistemas No Lineales de Control.................................................................................... 20
Control Adaptivo .................................................................................................... 22
Sistemas Lineales de Segundo Orden ..................................................................... 23
Controlabilidad ....................................................................................................... 27
Observabilidad ........................................................................................................ 29
Estabilidad asintótica general o total. ..................................................................... 32
Teorema principal de la estabilidad de Liapunov. .................................................. 33
Negativa -V(x) = positivo ....................................................................................... 34
CLASES DE ESTABILIDAD................................................................................ 35
Sistema de Control Óptimo Cuadrático .................................................................. 40
DISEÑO PROPUESTO .................................................................................................. 42
CONSTRUCCIÓN MEDICIONES Y PRUEBAS......................................................... 44
DISEÑO DEL BLOQUE DE DESPLEGADO NUMÉRICO ........................................ 51
MODELO MATEMÁTICO ........................................................................................... 56
Simulación a lazo abierto ....................................................................................... 61
Estabilidad Entrada - Estado (ISS) ......................................................................... 67
Comparación entre los distintos métodos de control a lazo cerrado ..................... 68
CONCLUSIONES .......................................................................................................... 74
BIBLIOGRAFÍA ............................................................................................................ 75
GLOSARIO DE TÉRMINOS ........................................................................................ 77
ANEXOS ........................................................................................................................ 89

4
9.1-EQUIPOS COMERCIALES EXISTENTES Y SELECCIÓN DE LA LAMPARA 89
Lámparas UV .................................................................................................................. 90
9.2.-CONVERSION DE ANALOGICO A DIGITAL ................................................... 92
ERROR DE CUANTIFICACIÓN .......................................................................... 93
CIRCUITERÍA DE UN CONVERTIDOR D/A. ................................................... 96
ESPECIFICACIONES DEL DAC. . 97
CARACTERÍSTICAS DEL CONVERTIDOR DIGITAL A ANALÓGICO ....... 98
9.3.-NORMA OFICIAL MEXICANA ........................................................................... 98
5
SISTEMA DE CONTROL ELECTRÓNICO DE PH Y
ESTERILIZACIÓN, DE AGUA.
OBJETIVO:
DISEÑAR UN SISTEMA DE CONTROL ELECTRÓNICO PARA
ESTERILIZAR Y NEUTRALIZAR EL PH EN EL AGUA
6
PREFACIO
La ingeniería trata sobre del comportamiento y control de los materiales y fuerzas de la
naturaleza en beneficio de la humanidad, el ingeniero de sistemas de control está
interesado en el conocimiento y control de una parte de su medio, frecuentemente
denominado sistema, a fin de proporcionar un producto económico y útil a la sociedad.
La ingeniería de control se basa en los fundamentos de la teoría de la retroalimentación
y el análisis de sistemas lineales e integra los conceptos de las teorías de redes, por lo
tanto, la ingeniería de control no está limitada a ninguna disciplina de la ingeniería,
sino que es igualmente a todas las ramas de la ciencia.
El primer trabajo significativo en control automático fue el regulador centrífugo de
James Watt para el control de la velocidad de una máquina de vapor, en el siglo
dieciocho, otros avances relevantes se deben a Minorsky, Hazen y Nyquits, entre
muchos otros.
Minorsky trabajó en controladores automáticos de dirección en barcos y mostró cómo
se podría determinar la estabilidad a partir de las ecuaciones diferenciales que
describen el sistema, Nyquist desarrolló un procesamiento relativamente simple para
determinar la estabilidad de los sistemas de lazo cerrado sobre la base de la respuesta
en, lazo abierto con excitación sinusoidal en régimen permanente, Hazen fue quien
introdujo el término servomecanismos para los sistemas de control de posición,
desarrolló el diseño de servomecanismos repetidores capaces de seguir con exactitud
una entrada cambiante.
Durante la década de los años cuarenta, los métodos de respuesta en frecuencia
posibilitaron el diseño de sistemas lineales de control a lazo cerrado que satisfacían los
comportamientos requeridos, a fines de los cuarenta y principios de los cincuenta, Evans
desarrollo por completo el método del lugar de las raíces, los métodos de respuesta en
frecuencia y el lugar de las raíces
En la década de los sesenta, con la innovación de las computadoras digitales se hizo
posible el análisis de sistemas complejos en el dominio del tiempo, desde entonces sé ha
desarrollado la teoría de control moderna, basada en el análisis y síntesis, en el dominio
del tiempo, utilizando variables de estado, con lo que se posibilita afrontar la
complejidad creciente de las plantas modernas y los estrictos requisitos de exactitud,
peso y costo, en aplicaciones militares, espaciales e industriales, los desarrollos más
recientes en la teoría de control moderna están en el campo de control óptimo de
sistemas, tanto determinísticos, cómo estocásticos, así cómo en sistemas de control
complejos con adaptación y aprendizaje.
Después de la segunda guerra mundial con el mayor uso de la transformada de Laplace,
las técnicas del en el dominio de la frecuencia continuaron dominando el campo del
control durante la década de los cincuenta, el énfasis en la teoría de la ingeniería de
control, se centró en el desarrollo y uso de los métodos en el plano s y particularmente
en el enfoque de los lugares geométricos de las raíces.
Fue trascendental la aplicación de los computadores analógicos y digitales como
componentes de control,: estos nuevos elementos de control proporcionaron una
capacidad para calcular con rapidez y exactitud, que no existía antes para el ingeniero
de control, con el advenimiento del Sputnik y la era espacial, se dio otro nuevo impulso
a la ingeniería de control, fue necesario diseñar sistemas de control complejos y
altamente precisos para proyectiles y ondas espaciales, además, la necesidad de
minimizar el peso de los satélites y de controlarlos con gran precisión ha ampliado el
7
importante campo del control óptimo., A causa de estas necesidades, despertaron gran
interés en la última década los métodos del en el dominio del tiempo debidos a
Lyapunov, Minorsky, L.S. Pontryagin y Bellman, desarrollaron nuevas teorías de
control óptimo.
En la actualidad, parece que la ingeniería de control debe de considerar
simultáneamente tanto el dominio del tiempo como el dominio de la frecuencia
para el análisis y el diseño de sistemas de control.
Un sistema de control es una interconexión de componentes que forman una
configuración del sistema que proporcionará una respuesta deseada del sistema, la base
para el análisis de un sistema es el fundamento proporcionado por la teoría de los
sistemas lineales, la cual supone una relación de causa-efecto para los componentes de
un sistema, la relación entrada-salida representa la relación de causa y efecto del
proceso, la cual a su vez representa el procesamiento de la señal de entrada para
proporcionar una variable de señal de salida, frecuentemente con una amplificación de
potencia, un sistema de control de circuito abierto utiliza un regulador ó actuador de
control a fin de obtener la respuesta deseada, el sistema de control de circuito cerrado
utiliza una medición adicional de la salida real, para compararla con la respuesta de
salida deseada, Es decir, un sistema de control con retroalimentación es aquel que tiende
a mantener una relación prescrita de una variable del sistema con otra, comparando
funciones de estas variables y usando las diferencias como medio de control.
El pH
Escala de pH y fue propuesta por vez primera por el bioquímico S.P.L Sorensen en
1909 inicialmente fue introducida para expresar de formas mas comoda las
concentraciones de H3O+ pero su utilidad se ha extendido mucho mas al tratar de los
ácidos débiles hemos visto que la concentración de los iones H3O+ de sus disoluciones
acuosas es frecuentemente muy pequeña, por ejemplo 10-4
moles / litro estás (potencias
negativas de 10 suelen ser incómodas hasta desde el punto de vista tipográfico, estando
expuestas a confusión. Por ello entre otras razones, Sorensen reemplazó las (H3O+) por
lo que llamó el pH de la disolución. Esta cantidad se define de la forma siguiente:
PH = -log [H3O+]
Y así, en una disolución en la que (H3O+) es igual a 10-4
moles / litro) será log10
(H3O+) = log10-4
= -4 y por tanto pH = 4.
Concepto del pH: El pH es la medida convencional de la actividad de los hidrogeniones,
esto es, de la acidez o alcalinidad de una solución. Cuando el agua pura se disocia, se
producen simultáneamente, y en igual número, iones de hidrógenos (H+) y de oxidrilos
(OH-), de tal modo que para cualquier temperatura se cumple la relación que indicamos:
K = [H+].[OH-] / [H2O]
En la cual K es una cantidad constante, y en la que [H+] y [OH-] representan las
concentraciones de los iones H+ y OH-. El valor de K, determinado por procedimientos
diversos y a la temperatura de 20ºC es muy aproximado a 10-4
por litro y como el agua
pura es eléctricamente neutra, en un litro de ella habrá pues 10-7
gramos - iones de H+ y
otros tantos de iones OH-. Como un litro de agua pura contiene 1.000: 18 = 55,555
8
moles de H2O, de ellas sólo 10-7
disociadas, resulta que en cada 555 millones de
moléculas de agua, únicamente existe una de ellas (18 gramos) totalmente disociada, lo
cual explica la resistencia opuesta por el agua pura al paso de la corriente eléctrica. Si al
agua se le adiciona un ácido, el número de iones H+ (que vendrá expresada por 10-6
, 10-
5... 10
-1) se elevará y el de iones OH- disminuirá proporcionalmente pues éstos se
combinan con los hidrogeniones que se adicionan y forman moléculas de agua no
ionizadas, e inversamente ocurre cuando se adiciona al agua pura una disolución básica
o alcalina, en la cual predominan los hidroxiliones OH-.
Resulta, pues, que:
Una solución es ácida cuando es [H+] > [OH-]
Una solución es neutra cuando es [H+] = [OH-]
Una solución es básica cuando es [H+] < [OH-]
Representando [H+] y [OH-] las concentraciones de hidrogeniones e hidroxiliones
respectivamente.
El químico Sorensen propuso en 1909 expresar el grado de acidez o de alcalinidad de
una solución por el valor absoluto del exponente de la base 10, o bien con el logaritmo
del número inverso de la concentración de los iones de hidrógeno en la solución,
concentración que se representa con el símbolo pH.
pH = log ( 1/[H+] ) = log 1 - log [H+] = - log [H+]
Si suponemos que la concentración de [H+] es igual a 10-7
, lo cual corresponde al agua
pura, tendremos:
pH = log ( 1/10-7
) = log 1 - log 10-7
= 0 - log 10-7
= 7
De esto se deduce que la suma de los pH y de los pOH es aproximadamente igual 14;
cuanto más bajo es el valor del pH de una disolución tanto más elevada es su acidez,
correspondiendo el pH = 0 a las soluciones normales de ácidos fuertes, y pH = 14 a las
soluciones de mayor basicidad o alcalinidad, disminuyendo éstas a medida que su pH se
aproxime a 7.

9
INTRODUCCIÓN
EVOLUCIÓN DE LAS TÉCNICAS DE CONTROL
Consideraremos aquí las técnicas de control avanzado en un sentido amplio,
comprendiendo todas aquellas estrategias no tradicionales de control, que permiten
alcanzar un mejor desempeño y adecuación a las características del proceso controlado.
En la mayoría de las aplicaciones clásicas de control, el proceso se diseñaba de forma
que su análisis resultase simple, de modo que los métodos se aplicaban en sistemas
lineales o linealizables. Las principales técnicas de análisis de estabilidad para este tipo
de sistemas son Diagrama de Nyquits, Lugar Geométrico de las Raíces, Diagrama de
Bode, se desarrollaron hace más de medio siglo.
Posteriormente, en la década de los sesenta, surgió la llamada Teoría Moderna de
Control, basada principalmente en el análisis de los sistemas en el dominio de las
variables de estado, esto es, un conjunto mínimo de variables del proceso que permiten
describir adecuadamente su dinámica. La Teoría de Control comenzó a especializarse,
dando origen al Control Óptimo, el Control Multivariable, el Control de Sistemas
Estocásticos, el Control Adaptivo, el Control No Lineal y el Control Robusto. Estos
métodos permiten abordar sistemas de mayor complejidad, que pueden tener: múltiples
entradas y salidas; variables estocásticas; estructura incierta no completamente
conocida, no lineal o variante en el tiempo. Desde el punto de vista de las aplicaciones,
se incorporan como sistemas de control los computadores y en general los sistemas
digitales esto es, discretos y cuantizados; y con ello se da más énfasis al estudio de los
métodos de análisis para sistemas discretos y distribuidos, así como al desarrollo de
algoritmos de control, optimización y simulación.
PRINCIPIOS BÁSICOS DE DISEÑO DE SISTEMAS DE CONTROL
Teoría de Control Moderna Versus Teoría de Control Clásico.
La teoría de control clásica utiliza extensamente el concepto de función de
transferencia; se realiza el análisis y el diseño en el dominio de s y/o el dominio de la
frecuencia; la teoría de control moderna, que esta basada en el concepto del espacio de
estado, utiliza extensamente el Algebra Lineal matricial, el análisis y el diseño se realiza
en el dominio del tiempo, la teoría de control clásica brinda generalmente buenos
resultados para sistemas de control de una entrada y una salida, sin embargo, la teoría
clásica no puede manejar los sistemas de control de múltiples entradas y múltiples
salidas. Requisitos generales de sistemas de control.
Todo sistema de control debe ser estable, esto es un requisito básico, la respuesta debe
mostrar un amortiguamiento razonable, así mismo, la velocidad de respuesta debe ser
razonablemente rápida, y el sistema de control debe ser capaz de reducir los errores a
cero, ó a un valor pequeño tolerable. El requisito de estabilidad razonable y el de
precisión en estado estacionario tienden a ser incompatibles, por lo tanto, al diseñar
sistemas de control es necesario definir estos dos conceptos requeridos.

10
Modelo Matemático.
Obtener un modelo matemático razonablemente exacto de un componente físico, es uno
de los problemas más importantes en ingeniería de control, para ser útil el modelo
matemático no debe ser ni muy complicado, ni excesivamente simple, es decir, debe
representar los aspectos esenciales de un componente físico, las predicciones del
comportamiento del sistema, basadas en el modelo matemático deben ser muy precisas;
en ingeniería de control se usan ecuaciones diferenciales lineales, invariantes en el
tiempo, funciones de transferencia y ecuaciones de estado, para modelos matemáticos
de sistemas lineales, invariantes en el tiempo y de tiempo continuo.
Análisis de un Sistema de Control
Análisis de un sistema de control se entiende la investigación, bajo condiciones
especificas, del comportamiento del sistema cuyo modelo matemático se conoce; el
análisis debe de comenzar con una descripción matemática de cada componente, una
vez que sé a elaborado un modelo matemático del sistema completo, la forma en que el
análisis se lleva a cabo es independiente de sí el sistema físico es neumático, eléctrico,
mecánico, etc.
El análisis de respuesta transitoria es la determinación de la respuesta de una planta a
señales y perturbaciones de entrada.
Análisis de respuesta en estado estacionario es la determinación de la respuesta tras la
desaparición de la respuesta transitoria.
Diseño de un sistema.- Se entiende hallar uno que cumpla con una tarea dada, si las
características de la respuesta dinámica y/o de estado estacionario no son satisfactorias,
se debe agregar un compensador al sistema, el diseño de un compensador adecuado no
es directo, sino que, requiere de procedimientos de tanteo.
Por Síntesis se entiende encontrar, mediante un procedimiento directo, un sistema de
control que se comporte de un modo específico, generalmente, tal procedimiento es
totalmente matemático de principio a fin del proceso de diseño.
La influencia de la computadora ha sido decisiva en la evolución de esta disciplina a
partir de los años ochenta. El análisis matemático, que se torna complejo o imposible en
sistemas no lineales, distribuidos, heterogéneos o de gran dimensión, es apoyado por la
simulación y por la emulación de habilidades humanas tales como la percepción, el
aprendizaje y otras capacidades propias de la inteligencia. Surgen los sistemas expertos,
las Redes Neuronales, las Redes de Petri y la Lógica Difusa. En el campo de los
sistemas no lineales, se abordan los comportamientos complejos antes ignorados:
subarmónicas, cuasi periodicidad y Caos, en los años noventa se comienza el estudio
sistemático.

11
Neutralización
Ácidos y bases, dos tipos de compuestos químicos que presentan características
opuestas. Los ácidos tienen un sabor agrio, colorean de rojo el tornasol, tinte rosa que se
obtiene de determinados líquenes y reaccionan con ciertos metales desprendiendo
hidrógeno. Las bases tienen sabor amargo, colorean el tornasol de azul y tienen tacto
jabonoso. Cuando se combina una disolución acuosa de un ácido con otra de una base,
tiene lugar una reacción de neutralización. Esta reacción en la que, generalmente, se
forman agua y sal, es muy rápida. Así, el ácido sulfúrico y el hidróxido de sodio NaOH,
producen agua y sulfato de sodio: H2SO4 + 2NaOH →2H2O + Na2SO4
Los conocimientos modernos de los ácidos y las bases parten de 1834, cuando el físico
inglés Michael Faraday descubrió que ácidos, bases y sales eran electrólitos por lo que,
disueltos en agua se disocian en partículas con carga o iones que pueden conducir la
corriente eléctrica. En 1884, el químico sueco Svante Arrhenius y más tarde el químico
alemán Wilhelm Ostwald definió los ácidos como sustancias químicas que contenían
hidrógeno, y que disueltas en agua producían una concentración de iones hidrógeno o
protones, mayor que la existente en el agua pura. Del mismo modo, Arrhenius definió
una base como una sustancia que disuelta en agua producía un exceso de iones
hidroxilo, OH-. La reacción de neutralización sería: H
+ + OH
→H2O
La teoría de Arrhenius y Ostwald ha sido objeto de críticas. La primera es que el
concepto de ácidos se limita a especies químicas que contienen hidrógeno y el de base a
las especies que contienen iones hidroxilo. La segunda crítica es que la teoría sólo se
refiere a disoluciones acuosas, cuando en realidad se conocen muchas reacciones ácido-
base que tienen lugar en ausencia de agua.
Una teoría más satisfactoria es la que formularon en 1923 el químico danés Johannes
Bronsted y, paralelamente, el químico británico Thomas Lowry. Esta teoría establece
que los ácidos son sustancias capaces de ceder protones, iones hidrógeno H+ y las bases
sustancias capaces de aceptarlos. Aún se contempla la presencia de hidrógeno en el
ácido, pero ya no se necesita un medio acuoso: el amoníaco líquido, que actúa como una
base en una disolución acuosa, se comporta como un ácido en ausencia de agua
cediendo un protón a una base y dando lugar al anión, ion negativo, amida: NH3 + base
NH2- + base + H
+.
El sistema de control del pH es generalmente uno de los siguientes tres tipos: continúo
sin control, controlado por tandas, y continúo controlado...
El más simple de todos es un sistema continuo sin control, que consiste en hacer pasar
una corriente de aguas residuales ácidas sobre un lecho de trozos de piedra caliza.
Otro método es tratar las aguas residuales por lotes. En este caso se mide el pH, se
añade ácido o base, y se vuelve a medir el pH hasta que se logra el nivel deseado y se
puede descargar el agua al alcantarillado, ò someterla a cualquier otro tipo de
tratamiento adicional que sea necesario.
El método más avanzado para controlar el pH es un sistema continuo con telesensores
que miden el pH y añaden los productos químicos necesarios. En este método el sensor
mide el pH y envía mensajes a un sistema de bombeo para que añada el producto
químico neutralizador que corresponda, y luego se mezcla el agua residual para
asegurarse que la distribución del neutralizador sea homogénea.
Existen sistemas más complejos con múltiples telesensores del pH y múltiples puntos de
adición química para afinar aún más el proceso y obtener pH más constantes. Para que
el sistema funcione correctamente es esencial mantener los electrodos limpios, ya que
tienen tendencia a obstruirse especialmente en aguas residuales muy corrosivas. Al
12
seleccionar el compuesto químico neutralizador hay que tener en cuenta varios factores,
entre ellos:
El estado del compuesto químico, sólido o líquido. El envase, a granel, en sacos, en
tambores, la toxicidad, la rapidez de la reacción, y la corrosividad.
El pHmetro profesional HI-98240 de pH /mV / °C con memoria, interfaz RS-232 e
impresora, que mide pH / mV / °C, reúne todas las ventajas y características que tiene
un pHmetro de mano, pero además dispone de una impresora integrada y de una interfaz
RS-232 y software para la transmisión de datos a la computadora. El pHmetro puede
usarse en sitio o en el laboratorio, La impresora del pHmetro trabaja con papel normal,
rollos de papel estándar. Las impresiones se pueden realizar presionando el botón o en
intervalos de tiempo regulares, selección de los intervalos de impresión, La memoria de
valores de medición interna tiene capacidad para 500 datos. Los valores de medición de
pH / mV guardados pueden transmitirse desde el pHmetro al ordenador tras haber
realizado la medición con el transmisor de infrarrojos. El pHmetro con electrodo
externo unido por medio de un cable, En este enlace dispone de una visión general
desde la cual podrá encontrar cualquier tipo de pHmetro que necesite.
Existe un software de Windows solamente para la transmisión y la valoración. Para
poder obtener siempre los valores de medición con la misma calidad se puede calibrar
de nuevo el pHmetro con la calibración interna de 1- 2- o 5 puntos, calibración
automática.
Este pHmetro posee además una compensación de temperatura automática hasta de
120°C.
Memoria de valores interna de 500 valores, interfaz RS-232, impresora integrada.
Especificaciones técnicas del pHmetro profesional HI-98240
Rango de medición -4,00...19,99 pH, +- 400 mV; +- 2000 mV, -10...+120,00 °C
Resolución 0,01 pH, 0,1 °C, 0,1 mV (+- 400 mV), 1 mV (+- 2000 mV)
Precisión a 20°C, ±0,01 pH, +- 0,5 mV (-400 a +400 mV).
Calibración pH: automática, con limitaciones grabadas 1,2-5mV: automática, con
limitaciones grabadas 2 o 3, Compensación de temperatura automática de -10...+120 °C
Electrodo con sensor de temperatura integrado, con cable de 1 m y conexión DIN.
Alimentación 4 baterías AA de 1,5 V para 350 h, Conexión al PC Interfaz RS-232 por
medio de un transmisor de infrarrojos y el cable de conexión al ordenador, la instalación
es necesaria para la transmisión de los valores guardados o bien para poder realizar una
medición en línea. Condiciones ambientales 0...50 °C 100 % Hr.
NORMA OFICIAL MEXICANA
Norma oficial mexicana NOM-179-SSA1-1998, vigilancia y evaluación del control de
calidad del agua para uso y consumo humano, distribuida por sistemas de
abastecimiento público

13
PLANTEAMIENTO DEL PROBLEMA
El agua, su cuidado y purificación son fundamentales para la vida, desarrollo y
bienestar de los seres humanos, lamentablemente es un producto que día con día se
agota y no existe cultura que lo proteja, las fuentes de alimentación del mismo se
reducen cada vez más, por lo que su transportación desde sitios alejados incrementa el
precio del producto,
El desarrollo de un prototipo de purificación de agua automatizado, aplicando las
normas establecidas, nacionales, es el presente trabajo, para así prevenir enfermedades
gastrointestinales de la población, así como controlar el alto contenido de sales nocivas
para la salud, manteniendo el control de pH.
Se desarrolla un prototipo de planta donde se aplican los procedimientos para la
obtención de agua purificada y certificada, desde el momento de su recepción, es decir,
agua con calidad de potable hasta su uso como agua purificada.
Se desarrolla un modelo con tratamiento de luz ultravioleta que operará a diferentes
intensidades de luz garantizando la completa purificación del agua, sin alterar el pH del
agua. El agua potable que procede de aguas superficiales es preciso esterilizarla, la
desinfección debe aplicarse en el uso de agua potable, para liberarla de gérmenes
patógenos en forma habitual y patente. Podemos tratarla utilizando métodos como
filtración, ebullición, desinfección. El proceso de Desinfección es cuando se eliminan
completamente los microorganismos del agua por métodos como adición de cloro,
ozono por radiación de luz ultravioleta entre otros.
La ebullición del Agua, es aplicable para pequeñas cantidades de agua, por ejemplo, en
los usos domésticos. Después de hervirla y cuando se enfríe, es recomendable pasarla
varias veces de un recipiente a otro. De esta manera con el aire, se convierte en una
sustancia digestiva. Sedimentar es asentar por efecto gravitacional las partículas sólidas
que hay, en el agua y se puede hacer de varias maneras.
Sedimentación.- Es el aislamiento por gravedad de las partículas sólidas contenidas en
el agua, puede ser simple o secundaria. Cloración es el nombre que se da al
procedimiento para desinfectar el agua más comúnmente usado, utilizando el cloro o
algunos de sus derivados como los hipocloritos de sodio o de calcio.
En los abastecimientos de agua potable se emplea el gas cloro mientras que para
abastecimientos medianos o pequeños se utilizan hipocloritos. El proceso más sencillo
de esterilización y barato es la cloración, la acción del cloro es de poca profundidad y
las partículas en suspensión la dificultan. Punto crítico de cloración, si en la cloración
sobrepasa el mínimo de cloro, se habla de cloración crítica, dañina para la salud y
causante de enfermedades tales como cáncer. Irradiación Ultravioleta, por medio de una
lámpara de cuarzo llena de vapor de mercurio, se pueden producir rayos ultravioleta.
Estos rayos matan a las bacterias, desintegrándolas. Ozonización, el ozono en contacto
con sustancias oxidables se descompone rápidamente en oxígeno naciente y oxígeno
diatómico inactivo. El primero destruye la materia orgánica. Si el agua no se encuentra
muy cargada de materias en suspensión, puede bastar un filtrado como única
depuración. Para cantidades pequeñas se fabrican filtros portátiles que pueden
transportarse con todos sus accesorios.
Los filtros de arena y minerales son lentos y poseen cierta acción eliminadora de
bacterias pero necesitan mucho espacio para la purificación de aguas fluviales. Estos
14
filtros retienen tierra, arena y algunas impurezas, pero dejan pasar algunos
microorganismos y las sustancias químicas disueltas. Filtros de carbón activado:
Empleado como material filtrante elimina olor, sabor y color del agua. Depósitos de
decantación: se emplean en la purificación previa de aguas muy sucias, por ejemplo,
corrientes superficiales haciéndolas pasar antes, en caso necesario, a través de rejillas
y desarenadores. Las plantas de filtración para agua potable, utilizan un tratamiento de
agua que se compones de Filtro Multimedia, Filtro de carbón activado, Suavizadores,
Filtración por Osmosis Inversa y Desinfección. El agua recibe varios tratamientos para
eliminar los microorganismos y sustancias químicas dañinas, que causan serias
enfermedades en los seres humanos, evitar que tenga color, olor y sabor desagradables,
disminuir el efecto corrosivo que daría los utensilios de cocina, bloquea las tuberías y
hace que las cañerías se dañen rápidamente. Para equipar debidamente las plantas de
tratamiento de agua y las estaciones accesorias de bombeo con los controles necesarios,
es preciso tener un conocimiento adecuado y profundo de las mediciones y controles a
fin de lograr un diseño sintetizado. Así se pueden lograr plantas de tratamiento bien
perfeccionadas fáciles de operar, aseguren mejores productos y menos trabajo.
Una planta de tratamiento nunca satisface en directo la demanda, trabaja constantemente
y almacena en caso de que las demandas futuras sean enormes, esto es que el diseño de
la planta de Tratamiento de Agua nunca debe ser igual a la demanda actual, sino por el
contrario se debe preparar para crecimientos futuros .,Los sistemas modulares
purificadores de tres etapas, han sido diseñados para cuidar nuestra salud y protegernos
de microorganismos y contaminantes químicos dañinos que se propagan a través del
agua y que son causantes de la mayor parte de las enfermedades que nos agobian. Las
tres etapas básicas que se conjugan para lograr como primer paso una micro filtración,
sólidos suspendidos con un filtro de cartucho sedimentador de 5 micras; como segundo
paso la eliminación de malos olores, sabores, cloro residual y compuestos químicos de
tipo orgánico, lo cual se logra con un cartucho de carbón activado granulado o extruído.
Por último, la eliminación total de virus y bacterias se lleva a cabo con una lámpara
germicida de rayos ultravioleta, proceso de desinfección natural, sin el empleo de
sustancias químicas, altamente efectivo e inofensivo al medio ambiente. Los rayos
ultravioleta destruyen los microorganismos mediante la transmisión de cantidades
concentradas de energía, La Purificación del Agua mediante rayos ultravioleta es un
método rápido y único para desinfectar el Agua sin utilizar productos químicos ni calor.
Los Purificadores de Agua utilizan lámparas germicidas de ultravioleta que producen
radiaciones de pequeñas ondas que son letales para las bacterias, virus y otros
microorganismos presentes en el Agua común. Las lámparas germicidas son
ampliamente utilizadas para desinfectar el aire en hospitales, clínicas veterinarias y
laboratorios para proteger al personal y prevenir infecciones. Los distribuidores
farmacéuticos, manipuladores de alimentos y embotelladores utilizan lámparas
germicidas para prevenir la contaminación del producto y en otros casos para la
esterilización fría de los productos acabados. Los ácidos nucleícos son los puntos de
ataque de la radiación U.V. de 254 nm. Y sirven así para impedir la división celular, que
produce finalmente efectos letales a los microorganismos. Los daños aparecen
especialmente en las bases de los ácidos nucleícos: timina, citosina y uracilo. Por esta
razón, y a diferencia de otros métodos de desinfección, no solamente las bacterias, sino
también los virus, levaduras, esporas, son susceptibles de ser destruidos.

15
VENTAJAS DE LA RADIACION ULTRAVIOLETA FRENTE A OTROS SISTEMAS
Destrucción instantánea y segura de todos los microorganismos, No precisa tiempo de
contacto: el efecto de desinfección es inmediato, No altera ni modifica la composición
química del Agua, ni por lo tanto, su olor y sabor característico., No hay posibilidad de
formación de compuestos secundarios perjudiciales. Ninguna acción corrosiva sobre las
instalaciones. Sencilla, limpia y segura manipulación, sin riesgos ni incomodidades para
su mantenimiento. Fácil instalación. Prácticamente nulo mantenimiento. Bajos costes de
inversión y explotación.
USO DOMÉSTICO
Proporciona Agua desinfectada, destruyendo todo tipo de bacterias en Aguas rurales no
de red municipal, previniendo enfermedades. Asegura la potabilidad de las Aguas
particulares de pozo, sin utilizar Cloro.
La desinfección de agua por radiación ultravioleta es un proceso físico que no altera su
composición química, su olor, ni su sabor., La seguridad de la desinfección UV está
probada científicamente y constituye una alternativa segura, eficaz y económica a la
cloración, sin el uso de agentes químicos. La radiación UV constituye una de las
franjas del espectro electromagnético y posee mayor energía que la luz visible. La
irradiación en los gérmenes presentes en el agua, con los rayos UV se provoca una serie
de daños en su molécula de ADN que impiden la división celular y causan la muerte.
La radiación UV más germicida es aquella de longitud de onda de 254 nm.
El ADN expuesto a esta energía presenta un máximo de absorción, es decir, de in-
activación, el efecto fotoquímico es constante si el producto de la intensidad de
radiación por tiempo de exposición es constante, ya que las bacterias difieren en su
sensibilidad a la radiación ultravioleta, la variable que puede manejarse fácilmente en el
tiempo debido a que la potencia suministrada por la lámpara, así como la distancia, son
constantes para el proyecto.
El método más eficiente de generar rayos UV-C es a partir de una lámpara de descarga
de mercurio de baja presión. La radiación primaria generada por esta lámpara consiste
prácticamente en una línea del espectro a 254nm, la cual está situada junto al máximo
efecto de sensibilidad a los rayos UV-C por parte de los organismos. Estas lámparas
tienen una cubierta de cristal especial con un índice de transmisión que permite el paso
de las longitudes de onda mayores a 200nm.
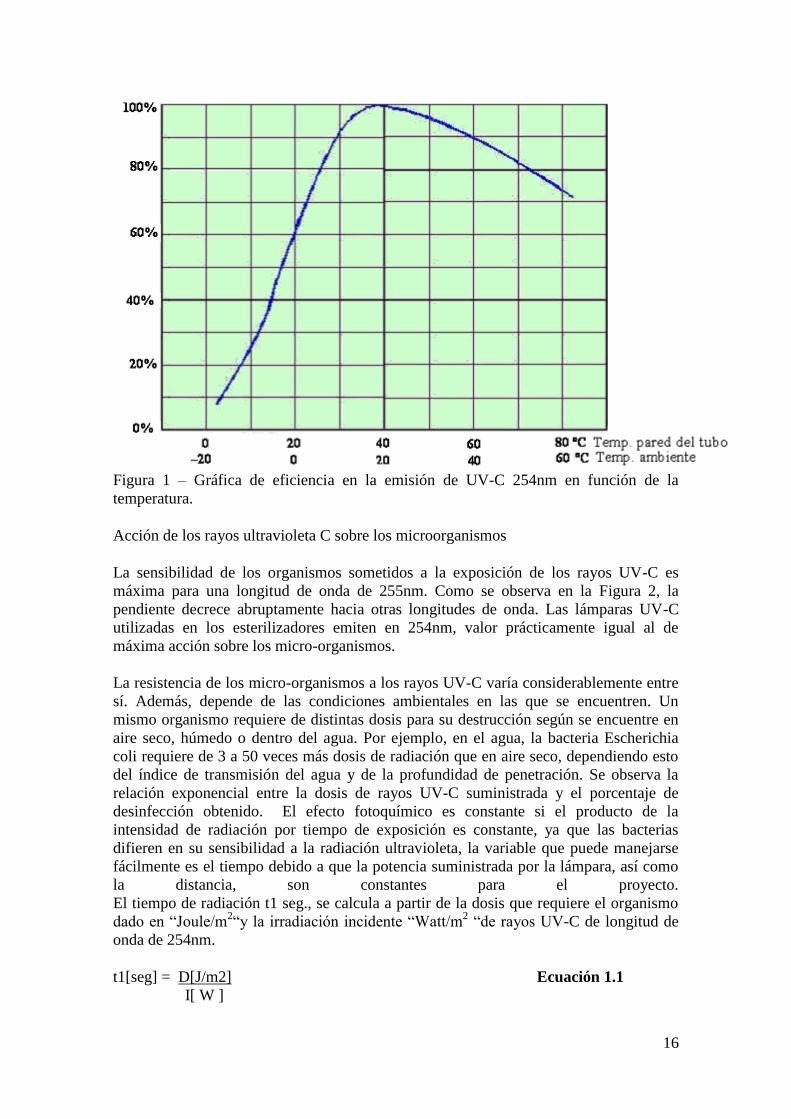
La radiación de 254nm máxima es generada a una cierta presión de vapor de mercurio.
Esta presión está determinada por la temperatura de operación y es óptima a una
temperatura ambiente de 20 °C. A otras temperaturas la eficiencia decrece como se
observa en el siguiente gráfico.
16
Figura 1 – Gráfica de eficiencia en la emisión de UV-C 254nm en función de la
temperatura.
Acción de los rayos ultravioleta C sobre los microorganismos
La sensibilidad de los organismos sometidos a la exposición de los rayos UV-C es
máxima para una longitud de onda de 255nm. Como se observa en la Figura 2, la
pendiente decrece abruptamente hacia otras longitudes de onda. Las lámparas UV-C
utilizadas en los esterilizadores emiten en 254nm, valor prácticamente igual al de
máxima acción sobre los micro-organismos.
La resistencia de los micro-organismos a los rayos UV-C varía considerablemente entre
sí. Además, depende de las condiciones ambientales en las que se encuentren. Un
mismo organismo requiere de distintas dosis para su destrucción según se encuentre en
aire seco, húmedo o dentro del agua. Por ejemplo, en el agua, la bacteria Escherichia
coli requiere de 3 a 50 veces más dosis de radiación que en aire seco, dependiendo esto
del índice de transmisión del agua y de la profundidad de penetración. Se observa la
relación exponencial entre la dosis de rayos UV-C suministrada y el porcentaje de
desinfección obtenido. El efecto fotoquímico es constante si el producto de la
intensidad de radiación por tiempo de exposición es constante, ya que las bacterias
difieren en su sensibilidad a la radiación ultravioleta, la variable que puede manejarse
fácilmente es el tiempo debido a que la potencia suministrada por la lámpara, así como
la distancia, son constantes para el proyecto.
El tiempo de radiación t1 seg., se calcula a partir de la dosis que requiere el organismo
dado en ―Joule/m2―y la irradiación incidente ―Watt/m
2 ―de rayos UV-C de longitud de
onda de 254nm.
t1[seg] = D[J/m2] Ecuación 1.1
I[ W ]

17
Figura 2– Gráfica de sensibilidad de los micro-organismos a los rayos UV.
Tabla 1.-En la tabla se indican las dosis mínimas de radiación en Joule/m2 para
desactivar distintos porcentajes de la bacteria Escherichia coli en aire seco.
Organismos Destruidos%
Dosis [ J /m2 ]
10 1.3
18 2.6
33 3.4
50 9.1
63 13.1
80 20.9
86 26.1
90 30.0
95 39
98 51
99 60
99.5 69
99.8 81
99.9 90
99.9 120
18
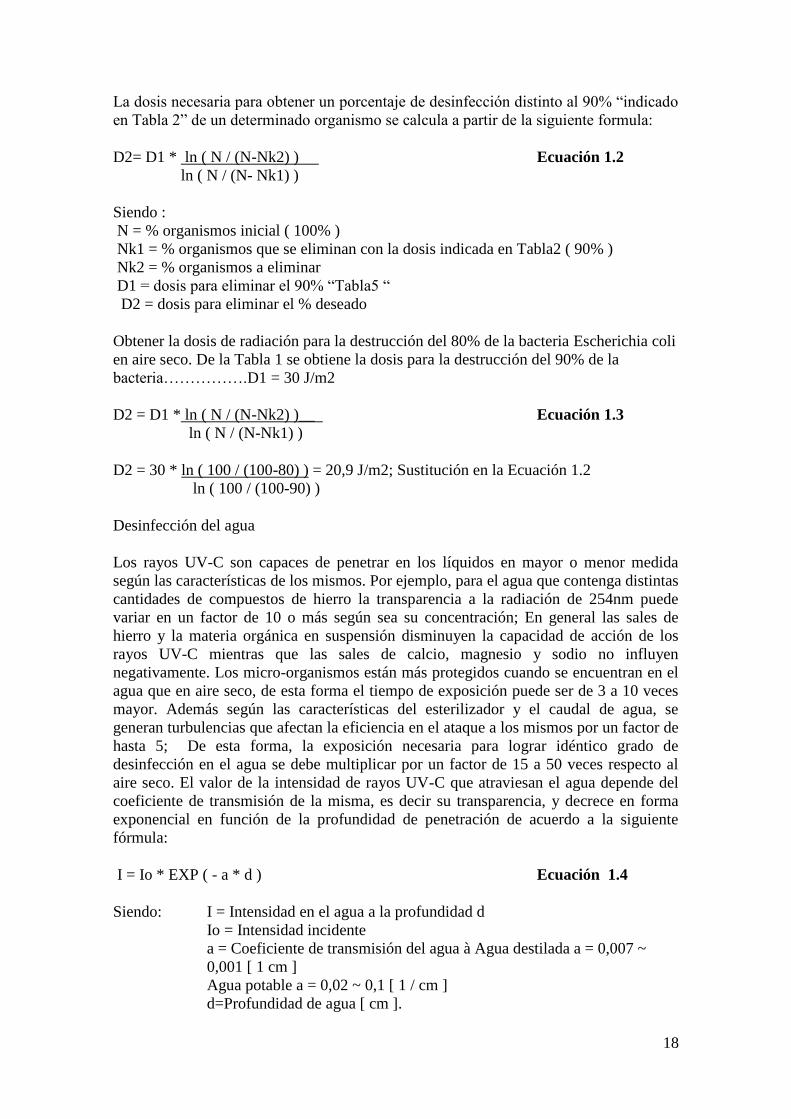
La dosis necesaria para obtener un porcentaje de desinfección distinto al 90% ―indicado
en Tabla 2‖ de un determinado organismo se calcula a partir de la siguiente formula:
D2= D1 * ln ( N / (N-Nk2) ) Ecuación 1.2
ln ( N / (N- Nk1) )
Siendo :
N = % organismos inicial ( 100% )
Nk1 = % organismos que se eliminan con la dosis indicada en Tabla2 ( 90% )
Nk2 = % organismos a eliminar
D1 = dosis para eliminar el 90% ―Tabla5 ―
D2 = dosis para eliminar el % deseado
Obtener la dosis de radiación para la destrucción del 80% de la bacteria Escherichia coli
en aire seco. De la Tabla 1 se obtiene la dosis para la destrucción del 90% de la
bacteria…………….D1 = 30 J/m2
D2 = D1 * ln ( N / (N-Nk2) )__ Ecuación 1.3
ln ( N / (N-Nk1) )
D2 = 30 * ln ( 100 / (100-80) ) = 20,9 J/m2; Sustitución en la Ecuación 1.2
ln ( 100 / (100-90) )
Desinfección del agua
Los rayos UV-C son capaces de penetrar en los líquidos en mayor o menor medida
según las características de los mismos. Por ejemplo, para el agua que contenga distintas
cantidades de compuestos de hierro la transparencia a la radiación de 254nm puede
variar en un factor de 10 o más según sea su concentración; En general las sales de
hierro y la materia orgánica en suspensión disminuyen la capacidad de acción de los
rayos UV-C mientras que las sales de calcio, magnesio y sodio no influyen
negativamente. Los micro-organismos están más protegidos cuando se encuentran en el
agua que en aire seco, de esta forma el tiempo de exposición puede ser de 3 a 10 veces
mayor. Además según las características del esterilizador y el caudal de agua, se
generan turbulencias que afectan la eficiencia en el ataque a los mismos por un factor de
hasta 5; De esta forma, la exposición necesaria para lograr idéntico grado de
desinfección en el agua se debe multiplicar por un factor de 15 a 50 veces respecto al
aire seco. El valor de la intensidad de rayos UV-C que atraviesan el agua depende del
coeficiente de transmisión de la misma, es decir su transparencia, y decrece en forma
exponencial en función de la profundidad de penetración de acuerdo a la siguiente
fórmula:
I = Io * EXP ( - a * d ) Ecuación 1.4
Siendo: I = Intensidad en el agua a la profundidad d
Io = Intensidad incidente
a = Coeficiente de transmisión del agua à Agua destilada a = 0,007 ~
0,001 [ 1 cm ]
Agua potable a = 0,02 ~ 0,1 [ 1 / cm ]
d=Profundidad de agua [ cm ].
19
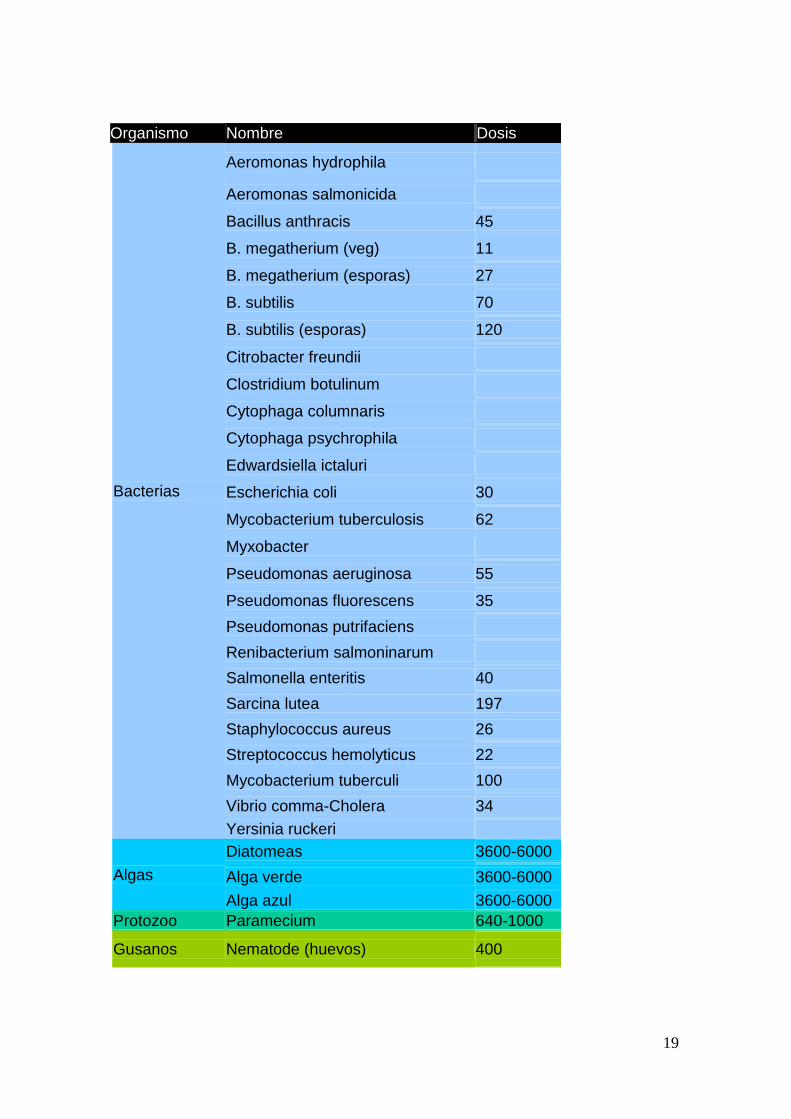
Organismo Nombre Dosis
Bacterias
Aeromonas hydrophila
Aeromonas salmonicida
Bacillus anthracis 45
B. megatherium (veg) 11
B. megatherium (esporas) 27
B. subtilis 70
B. subtilis (esporas) 120
Citrobacter freundii
Clostridium botulinum
Cytophaga columnaris
Cytophaga psychrophila
Edwardsiella ictaluri
Escherichia coli 30
Mycobacterium tuberculosis 62
Myxobacter
Pseudomonas aeruginosa 55
Pseudomonas fluorescens 35
Pseudomonas putrifaciens
Renibacterium salmoninarum
Salmonella enteritis 40
Sarcina lutea 197
Staphylococcus aureus 26
Streptococcus hemolyticus 22
Mycobacterium tuberculi 100
Vibrio comma-Cholera 34
Yersinia ruckeri
Algas
Diatomeas 3600-6000
Alga verde 3600-6000
Alga azul 3600-6000 Protozoo Paramecium 640-1000 Gusanos Nematode (huevos) 400
20
Tabla 2. Dosis mínima aproximada en [ J/m2 ] de radiación a 254nm para la destrucción
del 90% de varios micro-organismos.
MARCO TEÓRICO
Sistemas No Lineales de Control
La teoría de sistemas de control se ocupa del análisis y el diseño de componentes
interactuantes de un sistema en una configuración que brinde un comportamiento
deseado. La configuración esencial usada en teoría de sistemas de control se basa en el
concepto fundamental de realimentación, que consiste en el proceso de medir las
variables de interés en el sistema y usar esa información para controlar su
comportamiento. La teoría y la práctica del control tienen un amplio rango de
aplicaciones en los campos de la ingeniería aeronáutica, química, mecánica, ambiental,
civil y eléctrica, así como en muchas otras disciplinas no ingenieriles. Las ventajas del
control eficiente en la industria son inmensas, e incluyen mejoras en la calidad de los
productos, reducción en el consumo de energía, minimización de los materiales de
desecho, mayores niveles de seguridad y reducción de la contaminación. El punto de
partida en el análisis de un sistema de control es su representación por un modelo
matemático, generalmente como un operador entre entradas y salidas del sistema, o
como un conjunto de ecuaciones diferencia y/o diferenciales. La mayoría de los
modelos matemáticos usados tradicionalmente por teóricos y prácticos del control son
lineales. De hecho, los modelos lineales son mucho más manejables que los no lineales,
y pueden representar en forma precisa el comportamiento de sistemas reales en muchos
casos útiles. Sin embargo, los avances tecnológicos actuales han generado una enorme
variedad de nuevos problemas y aplicaciones que son no lineales en esencia. Por
ejemplo, fenómenos no lineales tales como equilibrios múltiples, ciclos límite,
bifurcaciones, corrimiento de frecuencias y caos, se observan comúnmente en
aplicaciones modernas importantes en ingeniería, tales como sistemas de comando de
vuelo, manipuladores robot, sistemas de autopistas automatizadas, estructuras de ala de
avión, y sistemas de inyección de combustible de alto rendimiento. Tales fenómenos no
lineales no se pueden describir mediante dinámica de modelos lineales — una razón
ineludible para el uso de modelos no lineales y el desarrollo de conceptos y
herramientas de sistemas no lineales de control. Alentada por la sofisticación de la
tecnología actual, la teoría de sistemas no lineales de control ha experimentado en la
década pasada una vigorosa expansión, reflejada por un número rápidamente creciente
de monografías y libros de texto científicos de sistemas no lineales de control.
La importancia de estos procedimientos sistemáticos de diseño es que, aunque
restringidos a sistemas con estructura especial, incluyen sistemas de importancia
práctica, tales como barcos, motores a reacción, motores turbo-diesel y motores
eléctricos de inducción.
La ecuación diferencial vectorial de primer orden:
x = f(x, u) Ecuación 2.0
donde x є Rn es el vector de estado y u є R
p es el vector de entradas ,de control. A
veces vamos a considerar también una ecuación de salida
y = h(x, u) Ecuación 2.1

21
donde y є Rm
es un vector de variables de interés, por ejemplo variables físicamente
medibles o variables que deseamos se comporten de alguna forma especial.
Figura 2.1: Sistema no lineal
Muchas veces la entrada u no aparece explícitamente, ya sea porque la entrada es cero o
porque fue especificada como una función del estado
) Ecuación 2.2
Control por Realimentación. En este caso la ecuación de estado es la ecuación no
forzada
x = f(x) Ecuación 2.3
Sistemas estacionarios o invariantes en el tiempo, es decir que su comportamiento es
invariante al corrimiento del origen temporal. Cuando el sistema es inestacionario o
variante en el tiempo, el lado derecho de (1.3) es una función explícita del tiempo. Un
concepto importante relacionado con la ecuación de estado (1.3) es el de puntos de
equilibrio.
Definición Puntos de Equilibrio.- Un punto x = x* en el espacio de estado es un
punto de equilibrio, PE, de (1.3) si tiene la propiedad de que cuando el estado inicial
del sistema es x*, el estado permanece en x* en todo tiempo futuro.
Los PE de (1.3) son las raíces de la ecuación
f(x) = 0 Ecuación 2.4
Un PE puede ser aislado, es decir no tiene otros PE en la vecindad, o puede existir un
continuo de PE. Cuando el sistema es lineal, (1.3) tiene la forma conocida
x = Ax + Bu Ecuación 2.5
y el único PE aislado posible, tomando u = 0, es x = 0.
Como las técnicas de análisis y control lineales son bien conocidas, siempre es
conveniente, al analizar un sistema no lineal, comenzar linealizando el sistema
alrededor de algún punto de equilibrio y estudiar el sistema lineal resultante. Sin
embargo esto no es suficiente debido básicamente a dos razones:
22
i).- la linealización sólo predice el comportamiento local, no sirve para estudiar el
comportamiento lejos del punto de operación;
ii).- la dinámica de un sistema no lineal es mucho más rica que la de un sistema lineal
debido a la presencia de fenómenos no lineales como: escape en tiempo finito, múltiples
PE aislados, ciclos límite, oscilaciones sub-armónicas, armónicas o casi-periódicas,
caos, etc.
Control Adaptivo
Sistema de Control Adaptable.-En años siguientes se ha incrementado el interés en los
sistemas de control adaptable, junto con el interés y progreso de robótica y otros campos
del control. Él termino de sistema de control adaptable, tiene una variedad de
significados específicos, pero en general implican que el sistema es capaz de
acomodarse a modificaciones no predecibles del medio, sean esos cambios internos o
externos al sistema. Este concepto tiene una gran dosis de atracción para los diseñadores
de sistemas, un sistema altamente adaptable, además de aceptar las modificaciones
ambientales, también aceptará errores de diseño de ingeniería o incertidumbre y
compensará las fallas de componentes menores, incrementando así la confiabilidad de
los sistemas. Se comienza por presentar algunos conceptos básicos sobre sistemas de
control adaptable, explicando en qué consiste. Luego se tratan las funciones necesarias
que un controlador debe cumplir para que se pueda considerar adaptable. Finalmente se
presentan algunos conceptos sobre sistema de aprendizaje.
Sea la planta
ŷ = ay + ku. Ecuación 2.6
Donde u es la entrada de control e y es la salida medida. Supongamos que se quiere
obtener un sistema a lazo cerrado cuyo comportamiento entrada–salida sea el del
modelo de referencia
ŷm= amym + kmr Ecuación 2.7
Donde r es la entrada de referencia y el modelo se eligió de forma que ym (t) represente
la salida deseada para el sistema a lazo cerrado. Este objetivo puede alcanzarse
mediante el control en realimentación
u(t) =θ*1r(t) + θ*2y(t) Ecuación 2.8
Siempre que los parámetros de la planta a y k sean conocidos, k ≠ 0, y los parámetros
del control se elijan como
θ*1 = km / k Ecuación 2.9
θ*1 = am − a /k Ecuación 2.10
Cuando a y k son desconocidos, podemos considerar el control
u(t) = θ*1(t)r(t) + θ*2(t)y(t) Ecuación 2.11

23
Donde las ganancias variables θ*1(t) y θ*2(t) van a ser ajustadas on-line usando los
datos disponibles: r(τ), ym(τ), y(τ ) y u(τ ) con τ < t. La adaptación debe ser tal
que θ1(t) y θ 2(t) evolucionen hacia sus valores nominales θ* 1 y θ* 2. La regla de
adaptación se elige en base a consideraciones de estabilidad, el algoritmo del gradiente
siguiente:
Donde es una constante positiva que determina la velocidad de adaptación. Para
escribir un modelo de estado, es conveniente definir los errores: de salida paramétricos.
e = y − ym y Ecuación 2.14
Φ1 = θ 1 − θ*1 y Φ2 =θ2 − θ*2. Ecuación 2.15
Con un poco de manipulación algebraica se llega al lazo cerrado descrito por la
ecuación de estado no lineal, no autónoma
donde las señales r(t) e ym(t) son entradas externas. Un modelo más simple se obtiene
cuando se conoce k. En este caso se puede tomar θ 1 = θ* 1 y sólo θ 2 debe ajustarse en
línea.
Sistemas Lineales de Segundo Orden
Para estudiar el comportamiento local del sistema no lineal alrededor de un PE.
x = Ax Ecuación 2.19
La solución para un estado inicial x0 está dada por
Ecuación 2.20
donde Jr es la forma real de Jordan de A y M es una matriz real no singular tal que
M-1
AM = Jr Ecuación 2.21
Dependiendo de los autovalores de A, la forma real de Jordan toma alguna de las
siguientes tres formas:
Ecuación 2.22
donde k es 0 o 1.
La primera forma corresponde al caso en que los autovalores λ1 y λ2 son reales y
distintos, la segunda corresponde al caso en que los autovalores son reales e iguales, y
Ecuación 2.12
................................... Ecuación 2.13
. . Ecuación 2.16
........ Ecuación 2.17
................. Ecuación 2.18

24
la tercera corresponde al caso de autovalores complejos λ1,2 = α ± jβ. En el caso de
autovalores reales, hay que separar el caso en que al menos uno de los autovalores es
cero. En este caso, el origen no es un PE aislado y el comportamiento cualitativo del
sistema es distinto de los otros casos.
Autovalores Reales λ 1 ≠ λ 2 ≠0
En este caso M = [v1, v2], Ecuación 2.23
donde v1 y v2 son los autovectores asociados con λ 1 y λ 2. El retrato de fase es el de
un:
• nodo estable si ambos autovalores son negativos. Las trayectorias en el plano de fase,
son parábolas que se hacen tangentes al autovector lento, correspondiente al mayor
autovalor, cuando se acercan al origen, y paralelas al autovector rápido, correspondiente
al menor autovalor, lejos del origen.
• nodo inestable si ambos autovalores son positivos. Las trayectorias en el plano de fase
son parábolas con formas similares a la del nodo estable pero con sentido invertido.
• ensilladura si los autovalores tienen distinto signo. Las trayectorias en el plano de
fase, excepto las correspondientes a los autovectores, que son recta, son hipérbolas que
―comienzan‖tangentes al autovector estable, correspondiente al autovalor estable, en
infinito, y ―terminan‖tangentes al autovector inestable, correspondiente al autovalor
inestable, también en infinito.
Autovalores Complejos λ1,2 = α ± jβ En coordenadas polares r y θ el modelo de estado
se desacopla, tomando la forma
de forma que el radio es una función exponencial de la parte real de los autovalores, α, y
el ángulo crece linealmente con la parte imaginaria β. El retrato de fase es el de un
• nodo estable si α es negativa. Las trayectorias en el plano de fase son espirales
logarítmicas que convergen al origen.
• nodo inestable si α es positiva. Las trayectorias en el plano de fase son espirales
logarítmicas que divergen del origen.
• centro si α = 0. Las trayectorias en el plano de fase son elipses centradas en el origen.
El sistema puede tener 6 retratos de fase diferentes asociados con diferentes tipos de
equilibrio: nodo estable, nodo inestable, ensilladura, nodo estable, nodo inestable y
centro. El tipo de equilibrio está completamente especificado por la ubicación de los
autovalores de A. El comportamiento global del sistema, en todo el plano de fase, está
cualitativamente determinado por el tipo de equilibrio.
Uno o Ambos Autovalores Es Cero En este caso A tiene un kernel o espacio nulo no
trivial, es decir existe un subespacio no trivial del espacio de estado cuyos elementos
son mapeados al cero bajo la transformación lineal definida por A. Todo vector en el
kernel de A es un punto de equilibrio del sistema.
La dimensión del kernel puede ser uno o dos; si es dos, entonces A es la matriz nula y
todo punto en el espacio de estado es un punto de equilibrio. Cuando la dimensión del
kernel de A es uno, la forma de Jordan de A dependerá de la multiplicidad del cero
como autovalor. Cuando la multiplicidad del cero como autovalor es uno, el autovector
correspondiente define el conjunto o subespacio de equilibrio del sistema. Todas las
trayectorias en el plano de fase convergen al subespacio de equilibrio cuando el
autovalor no nulo es negativo, y divergen cuando es positivo; Cuando la
multiplicidad del cero como autovalor es dos, el autovector v1, donde M = [v1, v2] es
la transformación que lleva a la forma de Jordan, es el conjunto o subespacio de
……….. Ecuación 2.24
.... Ecuación 2.25
25
equilibrio del sistema. Las trayectorias que comienzan fuera del subespacio de
equilibrio se mueven paralelas a él.
Para el caso de perturbaciones lineales. Supongamos que A tiene autovalores distintos y
consideremos la matriz
A+ΔA Ecuación 2.26
donde ΔA es una matriz real de 2×2 cuyos elementos son arbitrariamente pequeños.
Comportamiento Cualitativo Cerca de un PE
Salvo en casos especiales, el comportamiento de un sistema no lineal en la vecindad de
un PE puede determinarse vía la linealización alrededor de ese punto.
Sea p = (p1, p2) un PE del sistema no lineal
Ecuación 2.27
(1.14) Ecuación 2.28
y supongamos que las funciones f1 y f2 son continuamente diferenciables, derivables
con derivada continua. Expandiendo el lado derecho de (1.14) en series de Taylor
alrededor de (p1, p2) obtenemos
1 = f1(p1, p2) + a11(x1 − p1) + a12(x2 − p2) + T.O.S Ecuación 2.29
2 = f2(p1, p2) + a21(x1 − p1) + a22(x2 − p2) + T.O.S. Ecuación 2.30
donde a i j es la derivada parcial de f i respecto de x j evaluada en
x1 = p1, x2 = p2, y T.O.S
son términos de orden superior, es decir de la forma
(x1 − p1)2, (x2 − p2)2, (x1 − p1)(x2 − p2)
y potencias superiores de los mismos. Como (p1, p2) es un PE tenemos que
f1(p1, p2) = f2(p1, p2) = 0
Como nos interesa el comportamiento cerca de (p1, p2), definimos
y1 = x1 − p1 Ecuación 2.31
y2 = x2 − p2 Ecuación 2.32
con lo cual el sistema toma la forma
ý 1 = a11y1 + a12y2 + T.O.S Ecuación 2.33
ý2 = a21y1 + a22y2 + T.O.S Ecuación 2.34
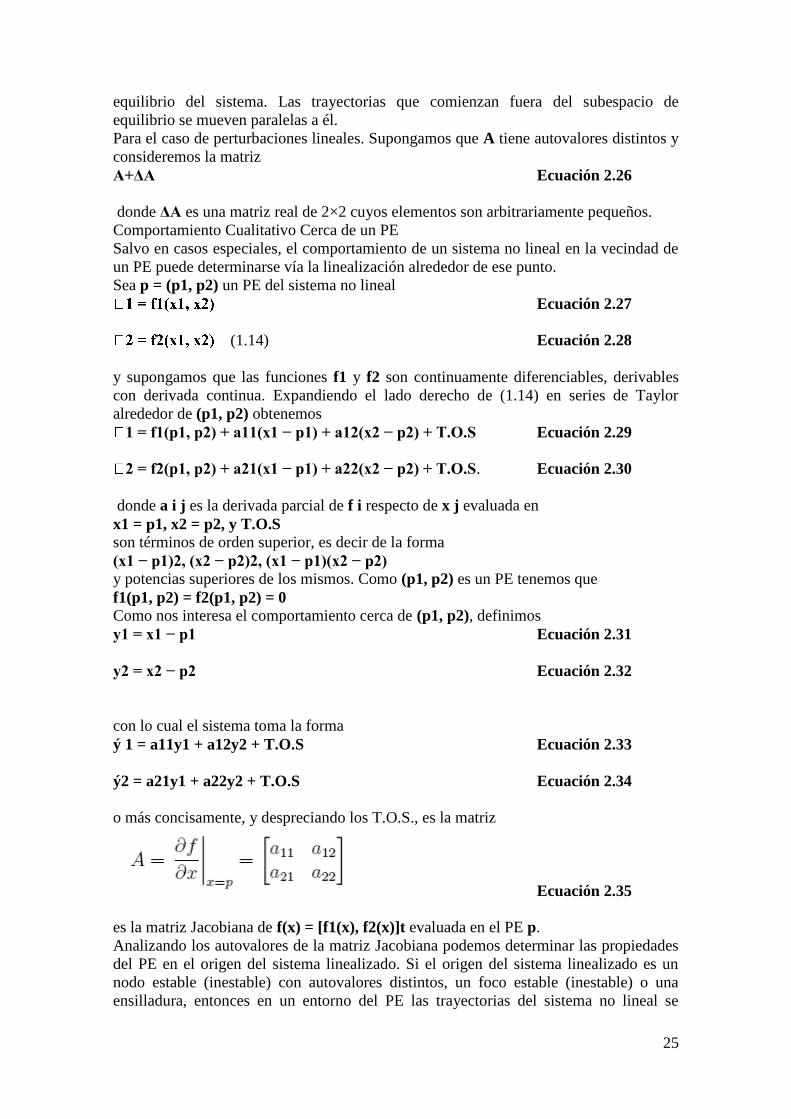
o más concisamente, y despreciando los T.O.S., es la matriz
Ecuación 2.35
es la matriz Jacobiana de f(x) = [f1(x), f2(x)]t evaluada en el PE p.
Analizando los autovalores de la matriz Jacobiana podemos determinar las propiedades
del PE en el origen del sistema linealizado. Si el origen del sistema linealizado es un
nodo estable (inestable) con autovalores distintos, un foco estable (inestable) o una
ensilladura, entonces en un entorno del PE las trayectorias del sistema no lineal se

26
comportan como las de un nodo estable (inestable), un foco estable (inestable) o una
ensilladura, respectivamente. En estos casos el PE del sistema no lineal también se
llama, por extensión, nodo, foco o ensilladura.
Esta propiedad de la linealización de un sistema no lineal alrededor de un PE sólo vale
si el equilibrio del sistema linealizado es hiperbólico. En este caso decimos que el
correspondiente PE del sistema no lineal es hiperbólico si la matriz Jacobiana
evaluada en el PE no tiene autovalores en el eje imaginario.
propiedades fundamentales de ecuaciones diferenciales ordinarias que hacen que
=f(t, x) Ecuación 2.36
sea un modelo apropiado para representar sistemas físicos. Estas propiedades son
esencialmente las de:
• existencia y unicidad de solución
• dependencia continua respecto de parámetros y condiciones iniciales.
Vamos a presentar los resultados para sistemas autónomos, sin entrada, y en general no
estacionarios, es decir, representados por:
= f(t, x). Ecuación 2.37
= f(t, x) , x(t0) = x0 . (2.1) Ecuación 2.38
Entendemos por solución en un intervalo [t0, t1] a una función continua
x : [t0, t1] →Rn tal que esté definida
ýx(t) = f(t, x(t)) Ecuación 2.39
para todo t 2 [t0, t1]. Vamos a asumir que f(t, x) es continua en x pero sólo
seccionalmente continua en t, esto nos va a permitir considerar entradas con saltos o
escalones. Una ecuación diferencial con una condición inicial dada puede tener varias
soluciones.
Teorema Existencia local y unicidad. Sea f(t, x) seccionalmente continua en t y
supongamos que satisface la condición de Lipschitz
Ecuación 2.40
Ecuación 2.41
Entonces existe δ > 0 tal que (2.1) tiene una solución única en [t0, t0 + δ].
Demostración. Notar que si x(t) es una solución de (2.1) entonces, integrando,:
Ecuación 2.42
Es decir, x(t) satisface (2.1) sí satisface (2.3), por lo que el estudio de existencia y
unicidad de la solución de la ecuación diferencial (2.1) es equivalente al estudio de
existencia y unicidad de la solución de la ecuación integral (2.3). Vamos a considerar el
lado derecho de (2.3) como un mapeo de la función continua
x : [t0, t1] → Rn; denotándolo como (Px)(t), podemos re-escribir (2.3) como
x(t) = (Px)(t) (2.4) Ecuación 2.43
Notar que (Px)(t) es continua en x. Una solución de (2.4) es un punto fijo del

27
mapeo P que lleva x a Px. La existencia de un punto fijo de (2.4) se puede probar
usando el teorema del mapeo contractivo. Para eso necesitamos definir un espacio de
Banach X y un conjunto
cerrado S⊂X tal que P mapee S en S y sea una contracción en S. Definamos
X = C[t0, t0 + δ ] , con norma
Ecuación 2.44
Ecuación 2.45
Una función que satisface (2.2) se dice Lipschitz en x y L es la constante de Lipschitz.
Decimos que f(x) es localmente Lipschitz en un dominio (conjunto abierto y conexo) D
→ Rn si cada punto de D tiene un entorno D0 tal que f satisface (2.2) con alguna
constante de Lipschitz L0. Decimos que f(x) es Lipschitz en un conjunto W si satisface
(2.2) en todos los puntos de W, con la misma constante de Lipschitz L. Toda función
localmente Lipschitz en un dominio D es Lipschitz en todo subconjunto compacto
(cerrado y acotado) de
D. Decimos que f(x) es globalmente Lipschitz si es Lipschitz en Rn.
Decimos que f(t, x) es localmente Lipschitz en x en [a, b] × D → R × Rn si cada punto
x ∈ D tiene un entorno D0 tal que f satisface (2.2) en [a, b] × D0 con alguna constante
de Lipschitz L0. Decimos que f (t, x) es localmente Lipschitz en x en [t0,1)×D si es
localmente misma constante de Lipschitz L.
Para funciones escalares, la condición de Lipschitz se puede escribir como
Ecuación 2.46
lo que implica que la pendiente está siempre acotada por L, es decir toda función f(x)
que tenga pendiente infinita en un punto no puede ser localmente Lipschitz en ese
punto. Por otro lado, si el valor absoluto de la derivada f ´ está acotado por una
constante k sobre un intervalo de interés, entonces f es Lipschitz en ese intervalo con
constante de Lipschitz L = k. Lo mismo vale para funciones vectoriales.
Controlabilidad
Se dice que un sistema es controlable en el tiempo to si se puede llevar de cualquier
estado inicial x (to) a cualquier otro estado, mediante un vector de control sin
restricciones, en un intervalo de tiempo finito; Las condiciones de controlabilidad
determinan la existencia de una solución completa para un problema de diseño de un
sistema de control. Tal vez no exista una solución a este problema si el sistema
considerado es no controlable.
Controlabilidad completa del estado de sistema en tiempo continuo, considere el sistema
en tiempo continuo:
dx/dt=Ax + Bu Ecuación 2.47

28
En donde x = vector de estados & vector de dimensión n
u= señal de control ; A = matriz de n x n ; B = matriz de n x 1
Se dice que el sistema descrito mediante la ecuación dx/dt=Ax + Bu es de estado
controlable en t =to si es posible construir una señal de control sin restricciones que
transfiera un estado inicial a cualquier estado final en un intervalo de tiempo finito to ≤
t ≤ t1.
Si todos los estados son controlables, se dice que el sistema de estado completamente
controlable; Ahora obtendremos la condición para una controlabilidad completa del
estado. Sin perder la generalidad, suponemos que el estado final es el origen en el
espacio de estados y que el tiempo inicial es cero, es decir, to= 0. La solución de la
ecuación es;
β0
β1
X( 0 ) = -Σ Ak B βk = - [B | AB | ......| An –1
B ] ׃
׃
β n-1... Ecuación 2.48
Si el sistema es de estado completamente controlable entonces, dado cualquier estado
inicial x (0) la ecuación debe satisfacerse. Esto requiere que el rango de la matriz de n x
n sea n
[ B | A B | ....... | A n –
1
B ] Ecuación 2.49
A partir de este análisis, establecemos del modo siguiente la condición para la
controlabilidad completa del estado: el sistema obtenido mediante la ecuación
dx/dt=Ax +Bu es de estado completamente controlable si y solo si los vectores
B, AB,....., A n – 1
B son linealmente independientes, a la matriz de n x n.
El resultado recién obtenido se extiende al caso en el que el vector de control u es de
dimensión r. Si el sistema se describe mediante
dx/dt =Ax + Bu Ecuación 2.50
En donde u es un vector de dimensión r, se demuestra que la condición para la
controlabilidad completa del estado es que la matriz de n x nr sea de rango n, o que
contenga n vectores columna linealmente independientes; La matriz se denomina, por lo
común, matriz de controlabilidad.
[ B | A B | .......| A n –
1
B ] Ecuación 2.51
Controlabilidad de la salida En el diseño practico de un sistema de control, tal vez pretendamos controlar la salida
en lugar del estado del sistema. Una controlabilidad completa del estado no es necesaria
ni suficiente para controlar la salida del sistema.

29
Por esta razón, es conveniente definir una controlabilidad completa de la salida por
separado. Considere el sistema descrito mediante
dx/dt =Ax + Bu 1 Ecuación 2.52
y = Cx + Du 2 Ecuación 2.53
en donde x = vector de estado, vector de dimensión n
u= vector de control , vector de dimension r
y= vector de salida , vector de dimension n
A = matriz de n x n
B = matriz de n x r
C= matriz de m x n
D = matriz de m x r
Se dice que el sistema descrito mediante las ecuaciones 2.83 y 2.84 es de estado
completamente controlable si es posible construir un vector de control sin restricciones
u(t) que transfiera cualquier salida inicial determinada y(to) a cualquier salida final
y(t1) en un intervalo de tiempo finito to ≤ t ≤ t 1.
Es posible demostrar que la condición para una controlabilidad completa de la salida es
la siguiente: el sistema descrito mediante las ecuaciones 2.83 y 2.84 es de salida
completamente controlables si y solo si la matriz m x (n+1) r es de rango m.
[ CB | CAB | CA2
B | .....| CAn – 1
B | D ] Ecuación 2.54
Observabilidad
La observabilidad se utiliza para calcular las variables de estado observando la salida en
caso de no tener acceso a esta; Dado un estado y( t + 1) como salida
Puede estimarse x(t) como estado.
La matriz de observabilidad esta determinada por:
C
CA
M = [ CT| ( Ca )
T | ( CA )
2 ׃ = [ ...... |
׃
CA n –1
Ecuación 2.55
Esta matriz nos sirve para determinar si un sistema de n-ésimo orden es o no
completamente observable. El sistema es completamente observable si y solo si la
matriz M es de rango máximo, es decir, si M tiene n renglones linealmente
independientes.
El sistema

30
Ẋ 1 2 1 0 X1 1
Ẋ2 -3 0 1 X2 = 1 r
Ẋ 3 4 0 0 X3 1
X1
Y = [ 0 0 1 ] X2
X3
Por ejemplo, es completamente observable, de la Ecuación 2.55 tenemos que:
2 1 0
CA = [ 0 0 1 ] -3 0 1 = [ 4 0 0 ]
4 0 0
2 1 0
CA2 = ( CA ) A = [ 4 0 0 ] -3 0 1 = [ 8 4 0 ]
4 0 0
0 0 1
M = 4 0 0
8 4 0
CRITERIO DE LIAPUNOV PARA ESTABILIDAD.-Existen muchos enfoques para
el análisis de la estabilidad de los sistemas de control invariantes en el tiempo. Sin
embargo, para los sistemas no lineales y/o los sistemas variantes con el tiempo, el
análisis de la estabilidad resulta muy difícil o imposible. El análisis de
estabilidad de Liapunov es un método que se aplica para encontrar respuestas a las
preguntas sobre la estabilidad de los sistemas no lineales. En 1892, Liapunov presentó
dos métodos, el segundo método, que es el que nos interesa, no requiere de las
soluciones de las ecuaciones diferenciales, mediante éste método se determina la
estabilidad de un sistema sin resolver las ecuaciones de estado. Esto ofrece una gran
ventaja porque, por lo general, es muy difícil despejar las ecuaciones de estado no
lineales y/o variantes con el tiempo.
Características.- Trabajan en tiempo, No requieren resolver ecuaciones
1.- Sistema.
x f( x , t ) Ecuación 2.56
ф ( x , t ) Ecuación 2.57

31
Donde x es el vector de estado y f (x.t) es un vector de dimensión n, cuyos elementos
son funciones de x1, x2,…xn
2. Estado de equilibrio.
ф ( xe , para todo t ) = 0, Ecuación 2.58
Es el punto en el que las variables de estado son igual a cero
Respuesta al estado inicial
Ф0 ( f = x0, t0) Ecuación 2.59
Estabilidad en el sentido de Liapunov. || X – Xe || ≤ k
donde || X – Xe || se denomina distancia euclidiana y se define cómo: la Ecuación
2.59.
|| X – Xn || = (( Xe – Xn 1 ) 2 +( Xe – Xn 2 )
2 + . . . + (Xe – Xns )
2)½
Figura 3 .- Ninguna variable debe de salirse del circulo donde se encuentra el punto de
equilibrio,.
Si suponemos que S( δ ) , esta formada por todos los puntos tales que || Xo – Xe || ≤
δ y si suponemos también que S ( ɛ ) está formada por todos los puntos tales que:
|| ( x, t ) – Xe || ≤ ε
El número real δ depende de ε, y en general, también depende de to. Si δ no depende de
to, se dice que el estado de equilibrio es uniformemente estable.
Lo que hemos planteado aquí es que primero seleccionamos la región S ( ε ) y, para
cada S ( ε ), debe existir una región S ( δ ) tal que las trayectorias que empiezan dentro
de S ( δ ) y no se aparten de S ( ε ) conforme t se incrementa indefinidamente.
Estabilidad Asintótica.-Se dice que un estado de equilibrio xe del sistema de la
ecuación 2.56 es asintóticamente estable si se establece en el sentido de Liapunov y

32
todas las soluciones que empiezan dentro de S convergen a xe, sin apartarse de S ( ε ),
conforme t se incrementa indefinidamente
.
Figura 4.- La región más grande de la estabilidad asintótica, conocida cómo dominio
de atracción, es la parte del espacio de estados en la cual se originan las trayectorias
asintóticamente estables, en otras palabras, todas la s trayectorias que se originan en el
dominio de atracción son asintóticamente estables.
|| Xo – Xe || ≤ δ CÍRCULO
Todas las soluciones que empiezan dentro de S convergen a xe, sin apartarse de S ( ε ),
conforme t se incrementa indefinidamente. Se puede ver fácilmente, ya que se requiere
que los estados se encuentren dentro del circulo de ε, y que salga del circulo δ.
Estabilidad asintótica general o total.
Si la estabilidad asintótica es válida para todos los estados, todos los puntos en el
espacio de estados, a partir de los cuales se originan trayectorias, se dice que el estado
de equilibrio es asintóticamente estable en general, es decir, se dice que el estado de
equilibrio xe del sistema obtenido mediante la ecuación 2.7 es asintóticamente estable,
en general, si es estable y todas las soluciones convergen a xe conforme t se incrementa
indefinidamente.

33
Figura 5.-Todos los demás estados que salgan de resolver las variables de estado menos
el punto de equilibrio nos genera él circulo ε. Todos los demás estados que salgan de
resolver las variables de estado menos el punto de equilibrio nos genera él círculo ε.
|| Ф ( X , t ) - xe || ≤ ε
Figura 6.- Se dice que un estado de equilibrio xe es inestable si para algún número real
ε > 0 y cualquier número real δ > 0, no importa que tan pequeño, hay un estado Xo en
S (δ ) tal que la trayectoria que empieza en estos estados es aparte de S ( ε ).
Teorema principal de la estabilidad de Liapunov.
Se puede demostrar que si una función escalar V(x) en donde x es un vector de
dimensión n, es definida positiva, lo estados x que satisfacen.
Para un sistema determinado, si se encuentra una función escalar definida positiva V(x)
tal que su derivada con respecto al tiempo, tomada a lo largo de una trayectoria, sea
siempre negativa, entonces, conforme se incrementa el tiempo, V(x) adopta valores cada
vez más pequeños de C. Conforme se incrementa el tiempo, V(x) finalmente se reduce a
cero y, por tanto, x también se reduce a cero. Esto explica la estabilidad asintótica del
origen del espacio de estados.
Suponga que el sistema se describe mediante
x = f (x,t) en donde f (0,t) = 0 para toda t Ecuación 2.60
Si existe una función escalar V(x,t) con primeras derivadas parciales continuas, que
satisfaga las condiciones
1. V(x,t) es definida positiva Ecuación 2.61
2. V(x,t) es definida negativa Ecuación 2. 62
Entonces el estado de equilibrio en el origen es uniforme y asintóticamente estable. Un
ejemplo sería de la ecuación 2.61 y 2.62 tenemos que:
Positiva V(x) = x1² + x2²

34
Negativa -V(x) = positivo
Con frecuencia nos referimos a una función como semidefinida ya sea positiva o
negativa, y se dice así porque no se pueden analizar juntas dos variables, por ejemplo
una función sería semidefinida negativa para la velocidad, la cual es una derivada, y
sería semidefinida positiva, para los ángulos, los cuales se requieren en forma de gráfica
que se formen círculos.
2º método dominio del tiempo, Criterio de Liapunov para la estabilidad.
Características, Trabajan en tiempo, No requieren resolver ecuaciones
1.- Sistema
Ẋ ( f , t ) Ecuación 2.63
Φ ( X ,t ) Ecuación 2.64
2.- Estado de equilibrio
f ( Xe , para todo t ) = 0
Respuesta al estado inicial.
Φ0 ( f : X0 ,t0 ) t = t0 Ecuación 2.65
|| x0 - xe || ≤ δ
||Φ0 ( x ,t ) – xe || ≤ ε Ecuación 2.66
Ẋ = f ( x, t ) Ecuación 2.67
Punto de equilibrio
xe → f ( t ; x0 , y0 ) .
Funciones Escalares
y = ( x12
+ x2 ) 2 Ecuación 2.68
y = - ( x12
+ 2x22 ) Ecuación 2.69
Distancia euclidiana Trayectorias
|| Xo – Xe || = f ( δ ) Ecuación 2.70
|| Φ ( f , X0 ,y0 ) - Xe || = f (ε ) Ecuación 2.71
35
CLASES DE ESTABILIDAD
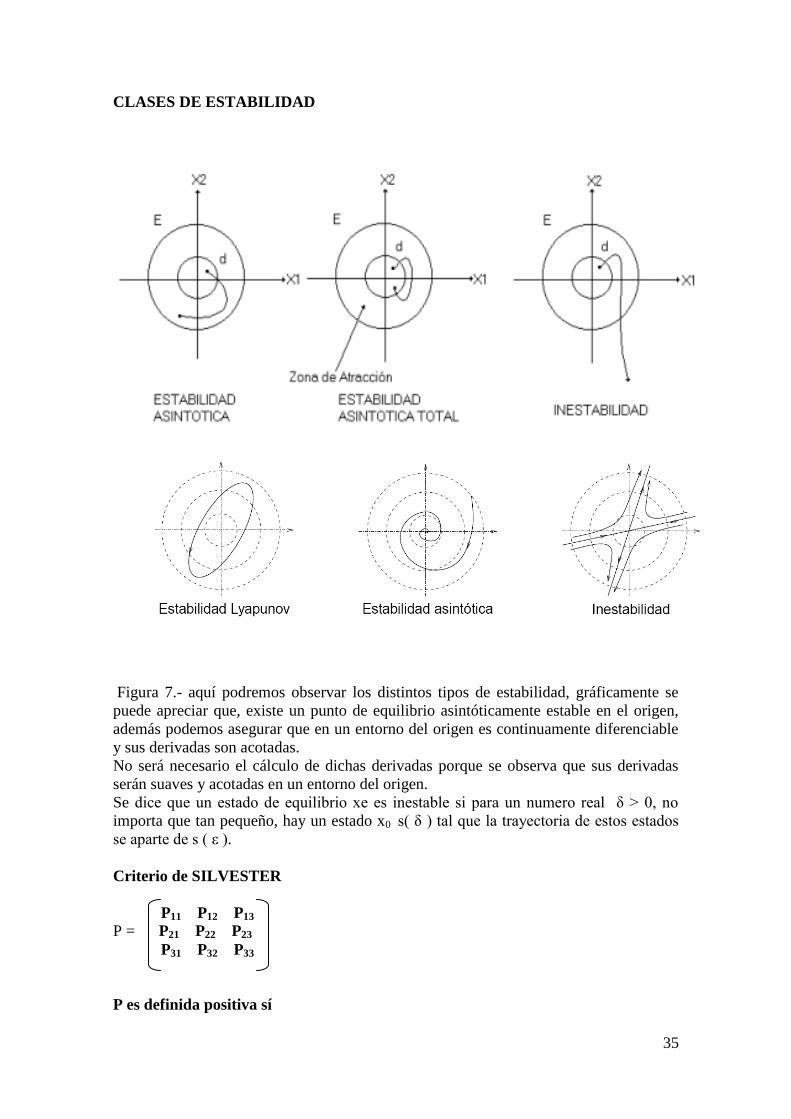
Figura 7.- aquí podremos observar los distintos tipos de estabilidad, gráficamente se
puede apreciar que, existe un punto de equilibrio asintóticamente estable en el origen,
además podemos asegurar que en un entorno del origen es continuamente diferenciable
y sus derivadas son acotadas.
No será necesario el cálculo de dichas derivadas porque se observa que sus derivadas
serán suaves y acotadas en un entorno del origen.
Se dice que un estado de equilibrio xe es inestable si para un numero real δ > 0, no
importa que tan pequeño, hay un estado x0 s( δ ) tal que la trayectoria de estos estados
se aparte de s ( ε ).
Criterio de SILVESTER
P11 P12 P13
P = P21 P22 P23
P31 P32 P33
P es definida positiva sí

36
P11 P12
P11 > 0 & P21 P22 > 0 & Δ P > 0 Ecuación 2. 72
Matriz cuadrática
1 0 X1
y = X12 + X2
2 → X1 X2 0 2 X2 Ecuación 2.73
X1 PX
V( x ) = 10x12
+ 4x22 + x3
2 + 2x1x2 – 2x2x3 – 4x1x3 Ecuación 2.74
1 0 2 -4 X1
X1X2X3 0 4 -2 X2
0 0 1 X3 Ecuación 2.75
Ẋ1 = x2 - x1 ( x22
+x12 )
Ẋ2 = -x1 – x2 ( x12
+ x22
)
v (x) definida positiva y Ṽ (x) definida negativa de la ecuación 2. 62
Ṽ (X) = x12
+ x22
Ṽ (x) = x2 ( -x1 – x2 )
Ṽ (x) = 2x1 Ẋ1 + 2x2 Ẋ2 Ṽ (x) = 2x1 ( x2 ) + 2x2 ( x12
+ x22
)
Ṽ (x) = -2x22
Ṽ (x) = 2x1 Ẋ1 + 2x2 Ẋ2 = 2x1( (x2 – x1 ( x12
+ x22
))+ 2x2 (-x1 – x2 ( x12
+
x22
))
Ṽ (x) = 2x12 ( x1
2 + x2
2 ) -2x2
2 ( x1
2 + x2
2 )
Ṽ (x) = -2 x12 ( x1
2 + x2
2 ) + x2
2 ( x1
2 + x2
2 )
Ṽ (x) = -2 ( x1
2 + x2
2 )2 definida negativa
Ẋ1 = 1 0 X1
Ẋ2 0 2 X2

37
El tipo de respuesta transitoria esta determinado por los polos de lazo cerrado, mientras
que la forma de la respuesta transitoria depende principalmente de los ceros de lazo
cerrado.
Polos dominantes de lazo cerrado.- el predominio relativo de los polos de lazo cerrado
esta determinado por la relación entre las partes reales de los polos de lazo cerrado, así
como por las magnitudes relativas de los residuos calculados en los polos de lazo
cerrado; los valores de los residuos, depende tanto de los polos como de los ceros de
lazo cerrado; si las relaciones de las partes reales exceden de 5 y no hay ceros cercanos,
los polos de lazo cerrado mas cercanos al eje jw dominaran el comportamiento de
respuesta transitoria, porque corresponde a términos de respuesta transitoria que
disminuyen lentamente. Esos polos de lazo cerrado tienen efectos dominantes en la
respuesta transitoria, se denominan polos dominantes de lazo cerrado y suelen
presentarse en forma de pares complejos conjugados; los polos dominantes de lazo
cerrado son los más importantes entre los polos de lazo cerrado. La ganancia de un
sistema de orden superior se ajusta a menudo de tal forma que haya un par de polos de
lazo cerrado complejos conjugados, la presencia de estos polos en un sistema estable,
reduce el efecto de no linealidades como zonas muertas, juego y fricción de Coulomb.
S Π – A = 0 αn polos normales Ecuación 2. 76
Ẋ= Ax + Bu
Ẋ= Ax + B ( -ku )
Ẋ= (A – Bk ) x δn polos reguladores Ecuación 2. 77
αn + ɑn=δn
Forma Canónica Controlable
1 0 0
A = 0 1 0
α3 α2 α1 Ecuación 2. 78
La forma canónica Observable es la transpuesta de la anterior matriz

38
Figura 8- Si las relaciones de las partes reales no exceden de 5 y no hay ceros cercanos,
los polos de lazo cerrado más cercanos al eje jw no dominaran el comportamiento de
respuesta transitoria, porque corresponde a términos de respuesta transitoria que
disminuyen lentamente. Esos polos de lazo cerrado tienen efectos no dominantes en la
respuesta transitoria, se denominan polos no dominantes de lazo cerrado y suelen
presentarse en forma de pares complejos conjugados
Figura 9.- De la figura se observa que mientras el valor real sea mas grande hay mas
sobregiro y si el valor imaginario cada vez es mayor hay mayor tiempo de
establecimiento.
Observador de Estado. Un observador de estado estima las variables de estado con
base en la medición de las variables de salida y de control. Como sé vera mas adelante,
se pueden diseñar observadores de estado si y sólo si, se satisface la condición de
observabilidad.
En los estudios siguientes sobre observadores de estado, se utilizará la notación x para
designar el vector de estado observado. En muchos casos prácticos el vector de estado
observado se utiliza en la retroalimentación del estado para generar el vector de
control deseado.
Considere el sistema definido por:
Suponga que el estado x se debe aproximar por el estado del modelo dinámico

39
que representa el observador de estado. Nótese que el observador de estado tiene a y y u
como entradas, y a como salida. El último término del miembro derecho de la
ecuación (3) es un término de corrección que incluye la diferencia entre la salida medida
y y la salida estimada . La matriz sirve como matriz pesante. El término de
corrección controla el estado . En presencia de discrepancias entre matrices A y B,
usadas en el modelo y en el sistema real, la adición de términos correctivos ayuda a
reducir los efectos debidos a la diferencia entre el modelo dinámico y el sistema real.
A continuación, se analizan detalles sobre el observador de estado, cuando la dinámica
se caracteriza por las matrices A y B y por el término de corrección adicional, que
incluye la diferencia entre la salida media y la salida estimada. En este análisis se
supone que las matrices A y B utilizadas en el modelo y las del sistema real son iguales.
º
Figura 9.- Se observa el diagrama de bloques del sistema y el observador de estado de
orden completo.
Observadores de estado de orden completo
El orden del observador de estado que se tratará aquí es el mismo que el del sistema.
Suponga que el sistema esta definido por las ecuaciones (1) y (2) y que el modelo de
observador esta definido por la ecuación (3).
Para obtener la ecuación del error del observador se resta la ecuación (3) de la ecuación
(1).
Se define la diferencia entre x y como el vector de error e, o sea
e = x -
Entonces, la ecuación (4) se convierte en
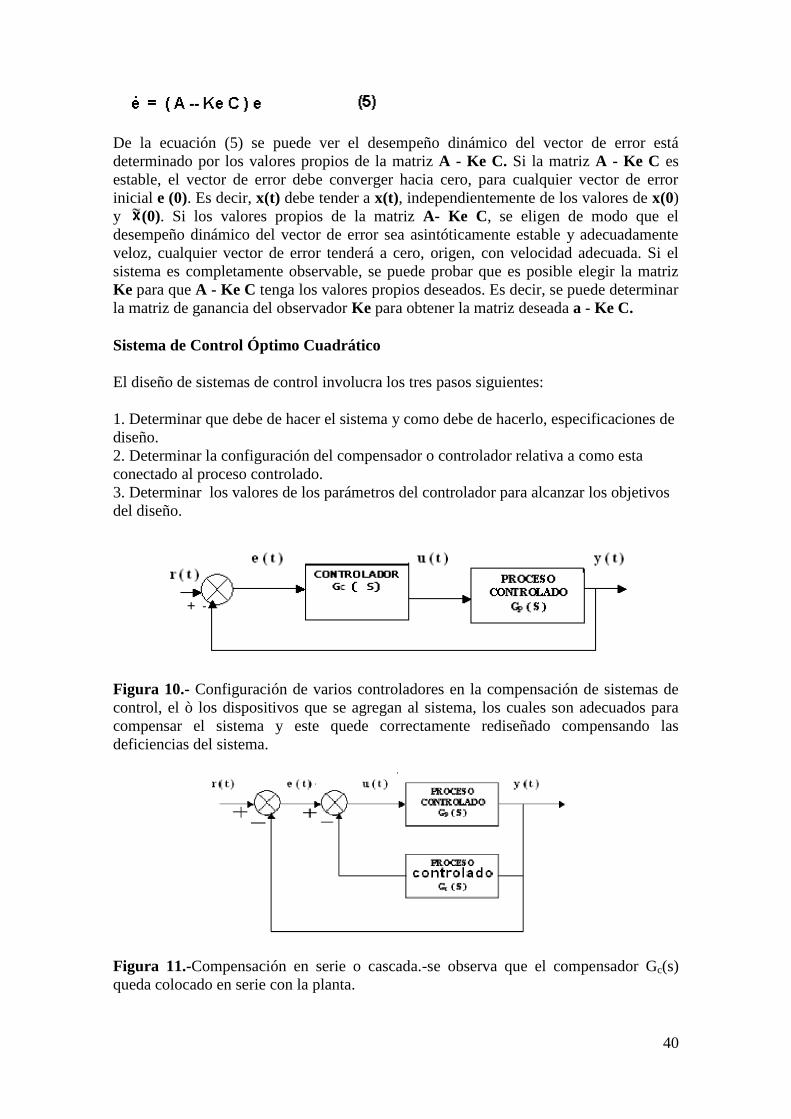
40
De la ecuación (5) se puede ver el desempeño dinámico del vector de error está
determinado por los valores propios de la matriz A - Ke C. Si la matriz A - Ke C es
estable, el vector de error debe converger hacia cero, para cualquier vector de error
inicial e (0). Es decir, x(t) debe tender a x(t), independientemente de los valores de x(0)
y (0). Si los valores propios de la matriz A- Ke C, se eligen de modo que el
desempeño dinámico del vector de error sea asintóticamente estable y adecuadamente
veloz, cualquier vector de error tenderá a cero, origen, con velocidad adecuada. Si el
sistema es completamente observable, se puede probar que es posible elegir la matriz
Ke para que A - Ke C tenga los valores propios deseados. Es decir, se puede determinar
la matriz de ganancia del observador Ke para obtener la matriz deseada a - Ke C.
Sistema de Control Óptimo Cuadrático
El diseño de sistemas de control involucra los tres pasos siguientes:
1. Determinar que debe de hacer el sistema y como debe de hacerlo, especificaciones de
diseño.
2. Determinar la configuración del compensador o controlador relativa a como esta
conectado al proceso controlado.
3. Determinar los valores de los parámetros del controlador para alcanzar los objetivos
del diseño.
Figura 10.- Configuración de varios controladores en la compensación de sistemas de
control, el ò los dispositivos que se agregan al sistema, los cuales son adecuados para
compensar el sistema y este quede correctamente rediseñado compensando las
deficiencias del sistema.
Figura 11.-Compensación en serie o cascada.-se observa que el compensador Gc(s)
queda colocado en serie con la planta.
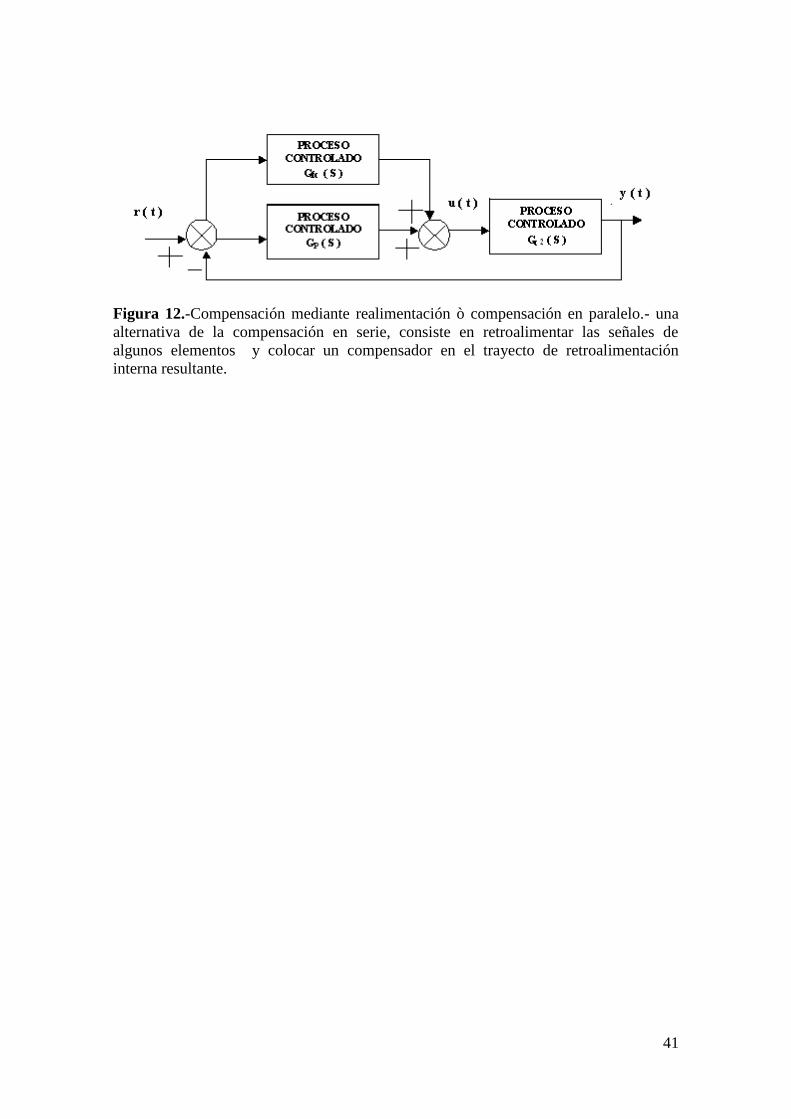
41
Figura 12.-Compensación mediante realimentación ò compensación en paralelo.- una
alternativa de la compensación en serie, consiste en retroalimentar las señales de
algunos elementos y colocar un compensador en el trayecto de retroalimentación
interna resultante.
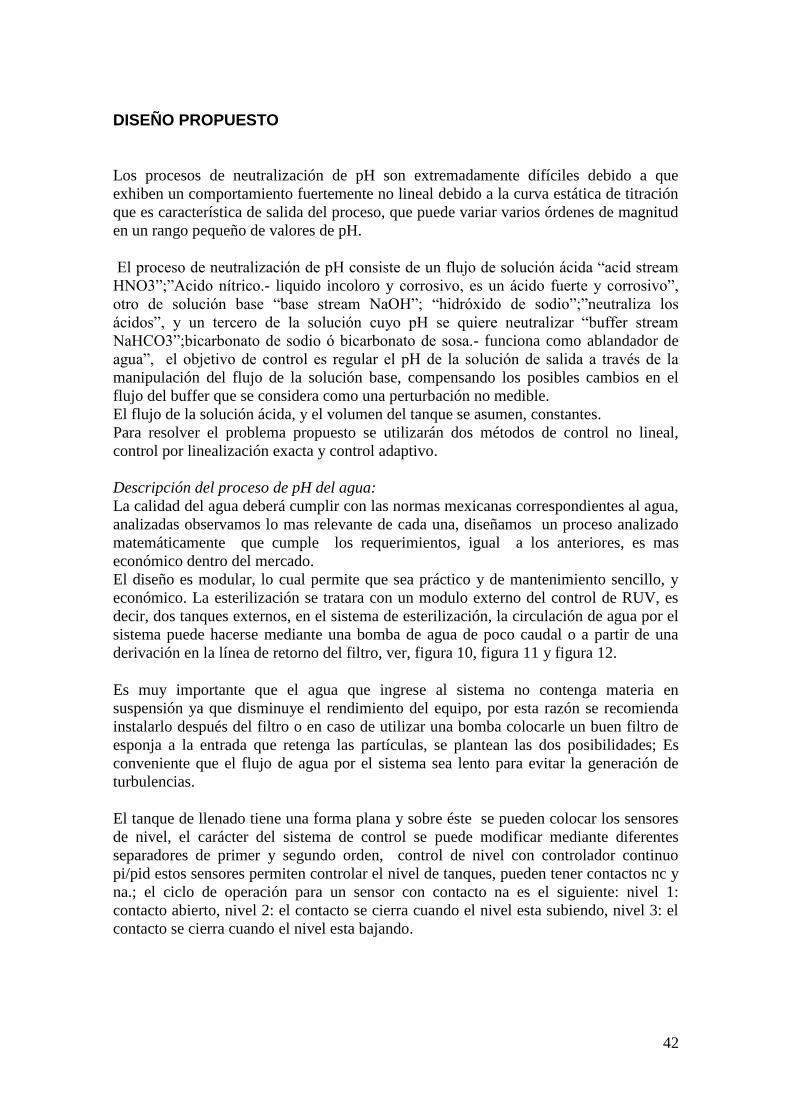
42
DISEÑO PROPUESTO
Los procesos de neutralización de pH son extremadamente difíciles debido a que
exhiben un comportamiento fuertemente no lineal debido a la curva estática de titración
que es característica de salida del proceso, que puede variar varios órdenes de magnitud
en un rango pequeño de valores de pH.
El proceso de neutralización de pH consiste de un flujo de solución ácida ―acid stream
HNO3‖;‖Acido nítrico.- liquido incoloro y corrosivo, es un ácido fuerte y corrosivo‖,
otro de solución base ―base stream NaOH‖; ―hidróxido de sodio‖;‖neutraliza los
ácidos‖, y un tercero de la solución cuyo pH se quiere neutralizar ―buffer stream
NaHCO3‖;bicarbonato de sodio ó bicarbonato de sosa.- funciona como ablandador de
agua‖, el objetivo de control es regular el pH de la solución de salida a través de la
manipulación del flujo de la solución base, compensando los posibles cambios en el
flujo del buffer que se considera como una perturbación no medible.
El flujo de la solución ácida, y el volumen del tanque se asumen, constantes.
Para resolver el problema propuesto se utilizarán dos métodos de control no lineal,
control por linealización exacta y control adaptivo.
Descripción del proceso de pH del agua:
La calidad del agua deberá cumplir con las normas mexicanas correspondientes al agua,
analizadas observamos lo mas relevante de cada una, diseñamos un proceso analizado
matemáticamente que cumple los requerimientos, igual a los anteriores, es mas
económico dentro del mercado.
El diseño es modular, lo cual permite que sea práctico y de mantenimiento sencillo, y
económico. La esterilización se tratara con un modulo externo del control de RUV, es
decir, dos tanques externos, en el sistema de esterilización, la circulación de agua por el
sistema puede hacerse mediante una bomba de agua de poco caudal o a partir de una
derivación en la línea de retorno del filtro, ver, figura 10, figura 11 y figura 12.
Es muy importante que el agua que ingrese al sistema no contenga materia en
suspensión ya que disminuye el rendimiento del equipo, por esta razón se recomienda
instalarlo después del filtro o en caso de utilizar una bomba colocarle un buen filtro de
esponja a la entrada que retenga las partículas, se plantean las dos posibilidades; Es
conveniente que el flujo de agua por el sistema sea lento para evitar la generación de
turbulencias.
El tanque de llenado tiene una forma plana y sobre éste se pueden colocar los sensores
de nivel, el carácter del sistema de control se puede modificar mediante diferentes
separadores de primer y segundo orden, control de nivel con controlador continuo
pi/pid estos sensores permiten controlar el nivel de tanques, pueden tener contactos nc y
na.; el ciclo de operación para un sensor con contacto na es el siguiente: nivel 1:
contacto abierto, nivel 2: el contacto se cierra cuando el nivel esta subiendo, nivel 3: el
contacto se cierra cuando el nivel esta bajando.

43
El pH es la variable que debemos controlar, utilizaremos un pHmetro, el cual nos dará
una salida digital para controlar la variación de pH, utilizaremos un circuito electrónico
para controlar esta variación que va de 6.5 a 7.
Para lograr el cumplimiento del objetivo perseguido en este trabajo se requieren de
ciertas características de funcionamiento y construcción que a continuación se
mencionan:
Todos los componentes electrónicos y mecánicos son obtenidos en el mercado
nacional.
Utilización de una lámpara germicida con una longitud de onda de radiación
ultravioleta de 253.7 nano metros ≈ 254 nanó metros.
Control programable de tiempo con salida visual en el rango de 00:00 a 99:59
horas.
Sensor indicador de intensidad de radiación suministrada por la lámpara.
La fuente de alimentación al sistema es de 120 voltios a una frecuencia de 60
Hz.
El proceso de esterilización se debe realizar en el interior de una caja de paredes
de aluminio cuyas dimensiones son de 500 X 600 X400 mm, la cual no permite
la salida de radiación ultravioleta.
Fundamentar los procesos de reconversión industrial, modernización e
innovación tecnológica.
Analizar las aplicaciones específicas de los sistemas automáticos de control para
garantizar su eficiencia en los procesos de producción.
Adquirir criterios tecnológicos para analizar, diseñar e implementar sistemas
automáticos.
Adquirir conocimientos y desarrollar destrezas en la concepción y aplicación de
sistemas automáticos de control.
Alarma de terminación de proceso de esterilización.

44
CONSTRUCCIÓN MEDICIONES Y PRUEBAS
Se tiene una fuente de ± 12 volts a 1 amp., la cual suministra el voltaje y corriente
requeridos por el bloque de censado de RUV y una fuente de 5 volts a 1 amp., para
alimentar los bloques restantes.
La base de tiempo es de 1 segundo.
Los controladores están conectados en cascada en forma descendente al pulsar 59
segundos, se activa el conteo del primer minuto de los 59 establecidos al completarse
éstos, se activa el conteo de la primera hora, de las 99 establecidas. De modo que el
usuario puede programar el tiempo de exposición en el rango de 00:00 a 99:59 horas.
El tiempo de 99.59 horas tiene una salida visual en 4 desplegados numéricos.
Cuando el tiempo programado llegue a cero, la lámpara RUV es apagada y se enciende
una alarma que suena en intervalos de un segundo hasta que se desactiva por el usuario.
Esta alarma suena de igual manera si por alguna razón la lámpara está apagada.
El apagado y encendido de la lámpara RUV, es manejado a través de un relevador de
estado sólido, el cual se activa dependiendo de la programación de los contadores y dos
interruptores. El primero activado por los usuarios y el otro que detecta que la puerta del
gabinete donde se realiza la esterilización está cerrada.
Tomando como base el diagrama a bloques del esterilizador se procede al diseño de
esté, partiendo de la base de tiempo.
Se diseña un reloj programable que mantenga encendida la lámpara de radiación
ultravioleta ―RUV‖ y muestre la potencia suministrada y active una alarma cuando
termine la exposición, ver figura 20.
Debido a sus características de construcción, precio y disponibilidad se optó por el
siguiente modelo de lámpara para nuestro prototipo: G36T6VH, con clave de
fabricación G36-3087.
Caracteristicas:
Aplicaciones de punto de uso .Compacto, ligero y económico. Fabricado en acero
inoxidable 316L.Componentes de alta calidad .Sistema económico en comparación con
otros métodos de desinfección .Se instala con herramientas domésticas .Puede llevar el
agua a cualquier parte .Contador horario .Su cámara de UV está garantizada durante 5
años de materiales defectuosos. Otros componentes están garantizados de materiales
defectuosos durante 12 meses. Indicador led de avería de lámpara.120 V/60 Hz, 220
V/50 Hz.
La Luz Ultravioleta es generada por un foco, el cual se encuentra dentro de un
envolvente de acero inoxidable, la radiación de la luz atraviesa el tubo de cuarzo y
contacta con los microorganismos que se encuentran en el agua, estos absorben la
radiación que penetra la membrana o endoplasma llegando al núcleo o DNA de los
mismos, hasta destruirlos.

45
En operación óptima, la duración del foco es de 6,000 a 7,000 horas aproximadamente,
salvo deterioro por inadecuado fluido eléctrico, una vez que se ha cumplido este lapso,
se recomienda cambiar dicho elemento , es conveniente cambiarlo cada 10 ó 12 meses
de operación.
El agua tratada con germicidas Ultravioletas no altera las características básicas del
agua.
Se recomienda tratar previamente el agua, mediante un filtro de 5 micras para retener
las partículas en suspensión que pudieran escudar a las bacterias.
Para su mantenimiento, de cada 10 a 12 meses se debe limpiar el tubo de cuarzo con
aquamonio, amoniaco líquido, y reemplazar el foco Ultravioleta, aunque encienda, para
eficientizar la desinfección del agua.
La radiación que genera la lámpara no tiene efectos posteriores, por lo tanto NO ES
NOCIVA para la salud del ser humano.
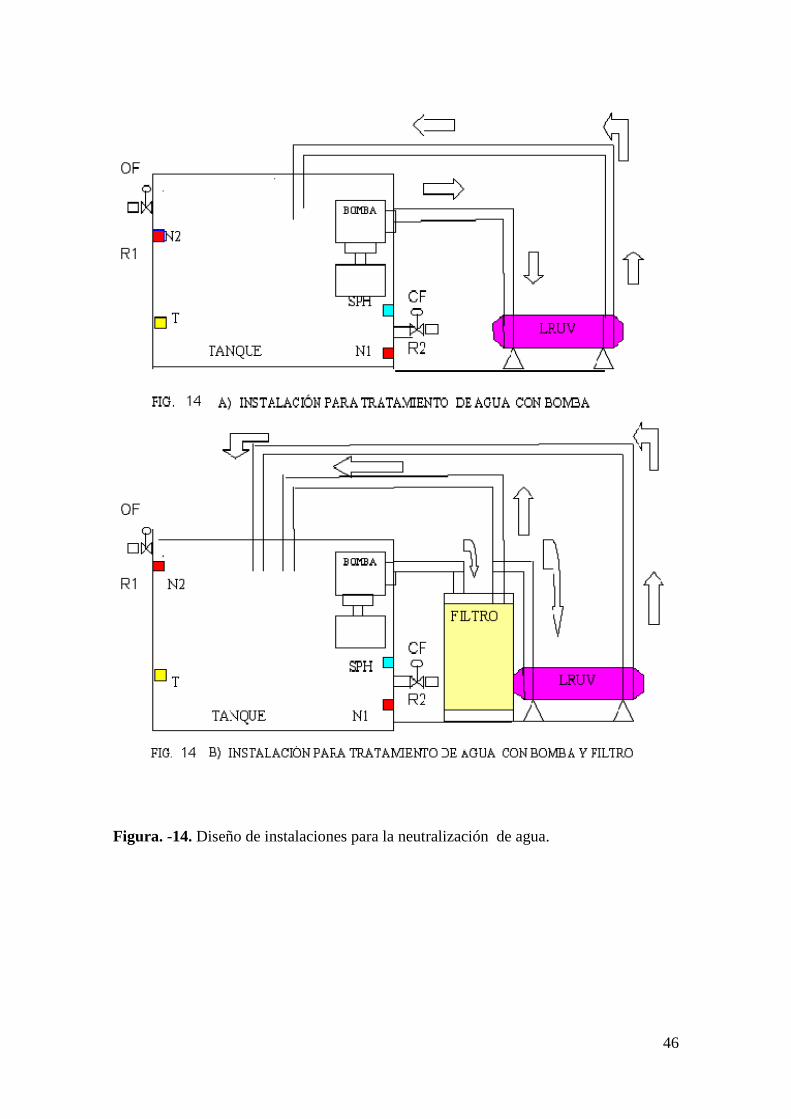
46
Figura. -14. Diseño de instalaciones para la neutralización de agua.

47
Figura 15. Diagrama a bloques del sistema de control para la LRUV.
PARA, CUANDO EL
TIEMPO PROGRAMADO
LLEGA A CERO
PROGRAMA LOS
CONTADORES AL
NÚMERO DESEADO
LA LAMPARA RUV
APAGA Y ENCIENDE
ALARMA DE
TERMINACION
DESPLEGADOS DE LAS
HORAS Y MINUTOS
CONTADORES DE
HORAS Y MINUTOS
BASE DE
TIEMPO
FUENTE DE
5 VOLTS
SENSADO
DE RUV
FUENTE DE
12 VOLTS

48
BASE DE TIEMPO
El proyecto utiliza un reloj que sirve de base para controlar el tiempo de encendido de la
lámpara, el reloj proporciona un segundo sin variaciones, construido con dispositivos de
Lógica Transistor Transistor ―LTT‖, y un cristal de 4 MHz como se muestra en la
siguiente configuración establecida.
Figura 16.- Circuito del reloj con un cristal de 4MHz
La frecuencia de resonancia del oscilador está dada por la frecuencia de resonancia serie
del cristal; El condensador se utiliza para desacoplar a corriente directa y no alterar las
características del cristal, de este proceso se tienen cuatro MHz.
A partir de los 4 MHz de la configuración anterior se obtiene un Hz ―que es en si, la
base de tiempo necesaria‖. Utilizando los circuitos integrados 74LS390 que son
contadores que tienen dos divisores entre diez y un integrado 74LS74 que es un
multivibrador doble tipo D.
Con los tres 74LS390 se realiza una división entre 1X106 resultando 4 Hz que a su vez
son divididos entre 4 por el 74LS74 obteniéndose finalmente un hertz, lo cual se puede
observar en la ―figura 17‖, dado que la frecuencia esta dada por

49
Figura 17. Circuito generador de 1 segundo, conexión en serie de los CI 74LS74
Diseño del bloque de contadores
La función de este bloque es activar el encendido y apagado de la lámpara de radiación
ultravioleta ―RUV‖, así como el de una alarma de terminación de proceso, dependiendo
del tiempo que el usuario determine, este tiempo puede ser programado en el rango de
99:59 a 00:00 horas.
Para hacer esto se usan: cinco contadores 74LS192 y un 74LS193. Los cuales son
conectados en cascada en forma descendente de tal manera que cuando lleguen a cero se
apague la lámpara y active la alarma que indica la terminación del proceso.
Para el caso de los segundos se usan dos contadores, un 74LS193 y un 74LS192
programados en sus entradas para contar 59 segundos en código decimal codificado en
binario ―DCB‖, al cruzar por cero el primer contador ―74LS193‖ lee su entrada y manda
una señal para decrementar el contador dos ―74LS192‖, que cuando llegue a cero lee su
entrada y manda la señal para decrementar el primer contador de los minutos
programados en sus entradas para contar 59 minutos. Los cuales decrementan los
siguientes contadores programados para contar 99 horas operando de igual manera que
tiempoT
frecuenciaF
Donde
TF
:
1
segHzF
T
Despejando
11
11
:

50
los contadores de los segundos. Los contadores de las horas y minutos están provistos
de desplegado numérico, lo cual se puede observar en la ―figura 18‖;
Figura 18.- Circuito electrónico de los contadores 74192, donde se genera a la salida la
señal de reloj.
51
DISEÑO DEL BLOQUE DE DESPLEGADO NUMÉRICO
La función de este bloque es mostrar el conteo llevado por los contadores, que
representa el tiempo de encendido de la lámpara RUV.
La señal de salida de los contadores de los minutos y las horas en código BCD, se
decodifica con el circuito integrado 74LS48, circuito capaz de manejar desplegados de
siete segmentos en configuración cátodo común.
El primer desplegado muestra dígitos decimales de 0 a 9, el segundo de 0 a 5, el tercero
de 0 a 9 y el cuarto de 0 a 9.
En la figura 19 se muestra el diagrama de los decodificadores y los desplegados de siete
segmentos, dos diodos emisores de luz que muestran la señal de base de tiempo de un
segundo y además, separan los minutos de las horas.
Las resistencias que están en las terminales de salida del decodificador y las entradas del
desplegado de siete segmentos limitan la corriente hacia los desplegados.
Considerando el voltaje de polarización directa del diodo emisor de luz ―Vd‖ de 1.5
volts de corriente directa, y una corriente de 10 miliamperios, ID y una fuente de
alimentación ―Vf‖ de 5 voltios de corriente directa.
Diseño del bloque que desactiva el tiempo programado
Cuando la salida de los contadores de minutos y horas se encuentran en cero, activan la
salida de las compuertas NOR MC4002 a un nivel alto, éstas a su vez activan las
compuertas AND 74LS08 a un nivel alto, activando con esto a la salida de una
compuerta NAND 74LS00 a un nivel bajo, esta señal se va a la entrada de la compuerta
NAND 74LS00, con la señal de reloj, activan su salida a un nivel alto que a su vez
activa la salida a un nivel bajo de la compuerta NAND 74LS00, que junto con la señal
del interruptor 1 activa la salida de la compuerta 74LS08 a un nivel bajo, desactivando
la señal del reloj. Figuras 17 y 18.
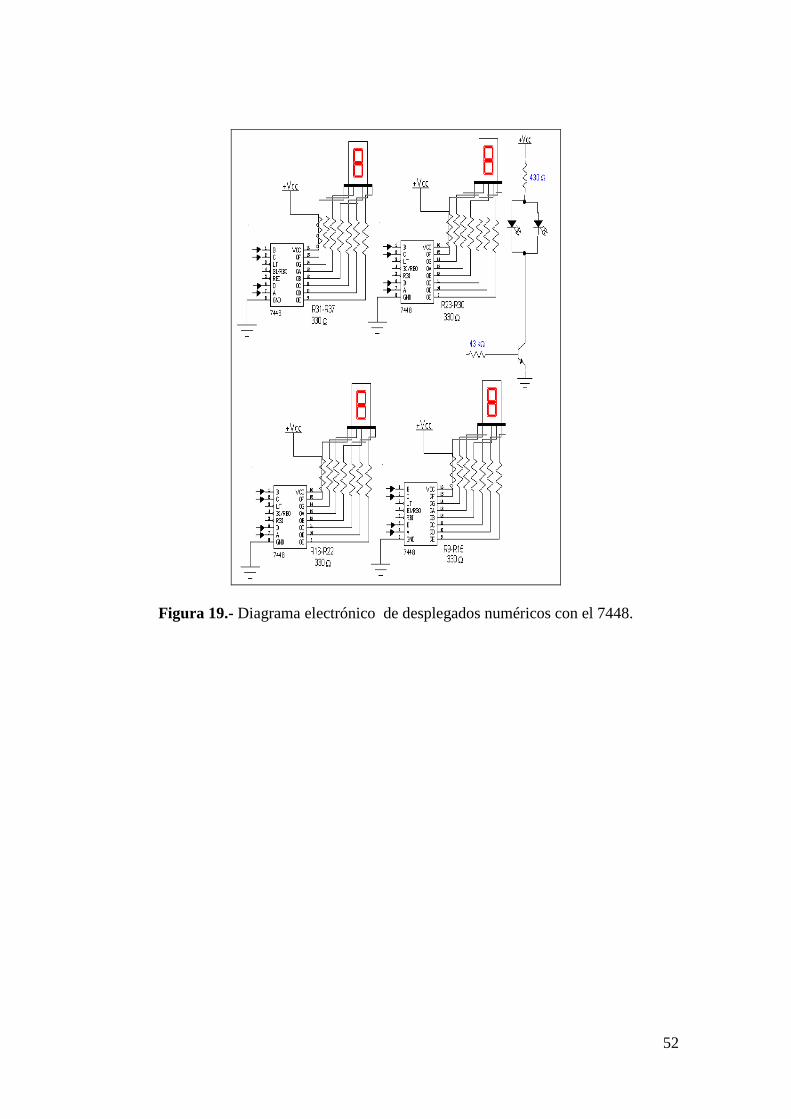
52
Figura 19.- Diagrama electrónico de desplegados numéricos con el 7448.
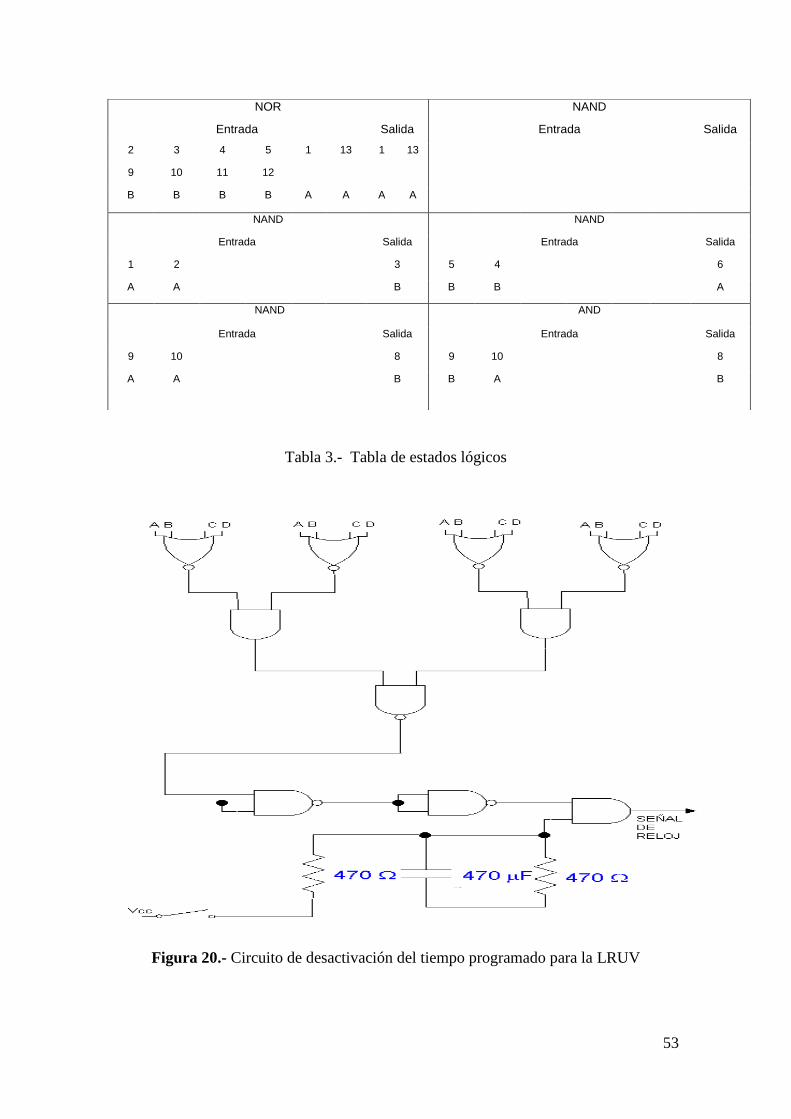
53
Tabla 3.- Tabla de estados lógicos
Figura 20.- Circuito de desactivación del tiempo programado para la LRUV
NOR NAND
Entrada Salida Entrada Salida
2 3 4 5 1 13 1 13
9 10 11 12
B B B B A A A A
NAND NAND
Entrada Salida Entrada Salida
1 2 3 5 4 6
A A B B B A
NAND AND
Entrada Salida Entrada Salida
9 10 8 9 10 8
A A B B A B
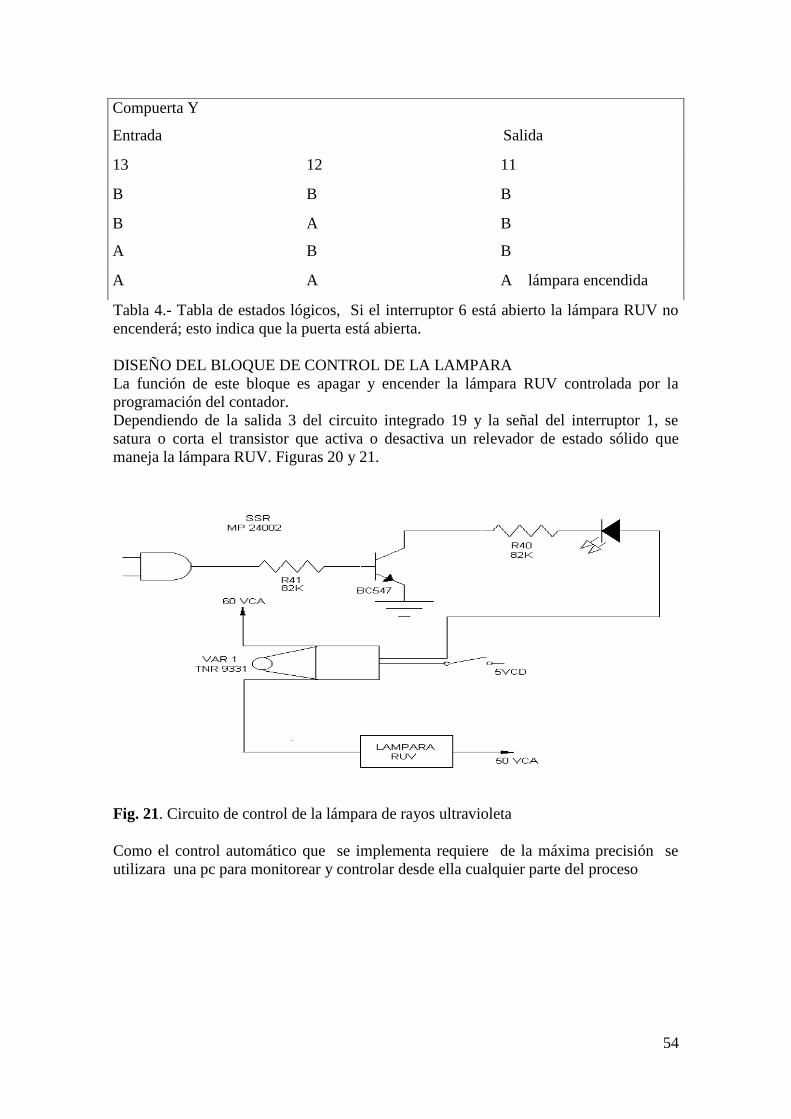
54
Tabla 4.- Tabla de estados lógicos, Si el interruptor 6 está abierto la lámpara RUV no
encenderá; esto indica que la puerta está abierta.
DISEÑO DEL BLOQUE DE CONTROL DE LA LAMPARA
La función de este bloque es apagar y encender la lámpara RUV controlada por la
programación del contador.
Dependiendo de la salida 3 del circuito integrado 19 y la señal del interruptor 1, se
satura o corta el transistor que activa o desactiva un relevador de estado sólido que
maneja la lámpara RUV. Figuras 20 y 21.
Fig. 21. Circuito de control de la lámpara de rayos ultravioleta
Como el control automático que se implementa requiere de la máxima precisión se
utilizara una pc para monitorear y controlar desde ella cualquier parte del proceso
Compuerta Y
Entrada Salida
13 12 11
B B B
B A B
A B B
A A A lámpara encendida

55
Figura 22.- Sistema de control del pH

56
MODELO MATEMÁTICO
El equilibrio químico puede modelarse introduciendo dos invariantes de reacción por
cada flujo entrante. Estas invariantes de reacción están definidas como:
Wai = [ H+ ]i - [ OH
- ]i - [ HCO
-3]i - 2 [ CO
=3]i Ecuaciòn 5.1
Wbi = [ H2CO3 ]i + [ HCO3- ]i + [ CO
=3]I Ecuaciòn 5.2
Donde i = 1 indica la solución ácida, i = 2 indica el buffer e i = 3 indica la solución
base.
Combinando los balances de masa en cada una de las especies iónicas del sistema, se
obtiene el siguiente sistema de ecuaciones diferenciales que describe el comportamiento
de las invariantes de reacción de la solución de salida, de la ecuación 2.0 tenemos:
Ecuación 5.3
Ecuación 5.4
Ecuación 5.5
donde :
Además:
x = [ x1 x2 ]T = [ Wa4 Wb4 ]
T (vector de estados)
q1: es el flujo de la solución ácida (constante)
d: es el flujo del buffer (perturbación)
u: es el flujo de la solución base (control)
y =pH (variable de salida)
Los parámetros v ―volumen‖, Wai, Wbi, i=1,2,3 ―invariantes de reacción‖, pk1, pk2
―constantes de disociación de H2CO3 y HCO 3- , respectivamente‖, son conocidos.
El próximo paso es realizar el estudio a lazo abierto de la planta.
Estudio de la Planta a Lazo Abierto:
El modelo matemático puede representarse en forma compacta como sigue:
Ẋ = f ( x ) + (x) u + p (x)d Ecuación 5.6
C(x,y) = 0. Ecuación 5.7
Desde el punto de vista del diseño de controladores, el modelo anterior presenta algunos
problemas. Un primer problema es que la perturbación d ―el flujo del buffer‖ es en

57
general no medible, y por otra parte tampoco es constante, sino que varía alrededor del
valor correspondiente a las condiciones nominales de operación de la planta. Surge
entonces la necesidad de estimar on line el parámetro d. Una posibilidad es construir un
observador ―no lineal‖ que estime d basándose en la entrada u y el estado x. Como en la
práctica sólo se dispone de mediciones de la entrada y la salida de la planta, ―es decir, el
estado no está disponible en cada instante‖, el observador no lineal deberá permitir la
estimación simultánea de estados y parámetros. Aquí surge el inconveniente de que la
salida no está dada como una función explícita del estado.
Este problema se puede subsanar tomando la derivada temporal en la relación implícita
c(x,y)=0 como sigue:
...........................................Ecuación 5.8
.Ecuación 5.9
donde f ( x ), p (x ) y g ( x ) son:
Entonces tenemos la ecuación 5.10

58
Ecuación 5.11
Considerando como salida al error ey = y - yr de seguimiento de una señal de referencia
constante yr, y realizando el cambio de variable en las ecuaciones 5.10, tenemos la
ecuación 5.12
........Ecuación 5.13
Resulta:
Se deduce fácilmente que el grado relativo del sistema es igual a uno dado que la
derivada del error depende directamente de la entrada.
Seguido a este estudio matemático del sistema a lazo abierto es importante realizar
simulaciones para una mejor comprensión del mismo, así como también para realizar
comparaciones con los sistemas a lazo cerrado.
Ecuación 5.14
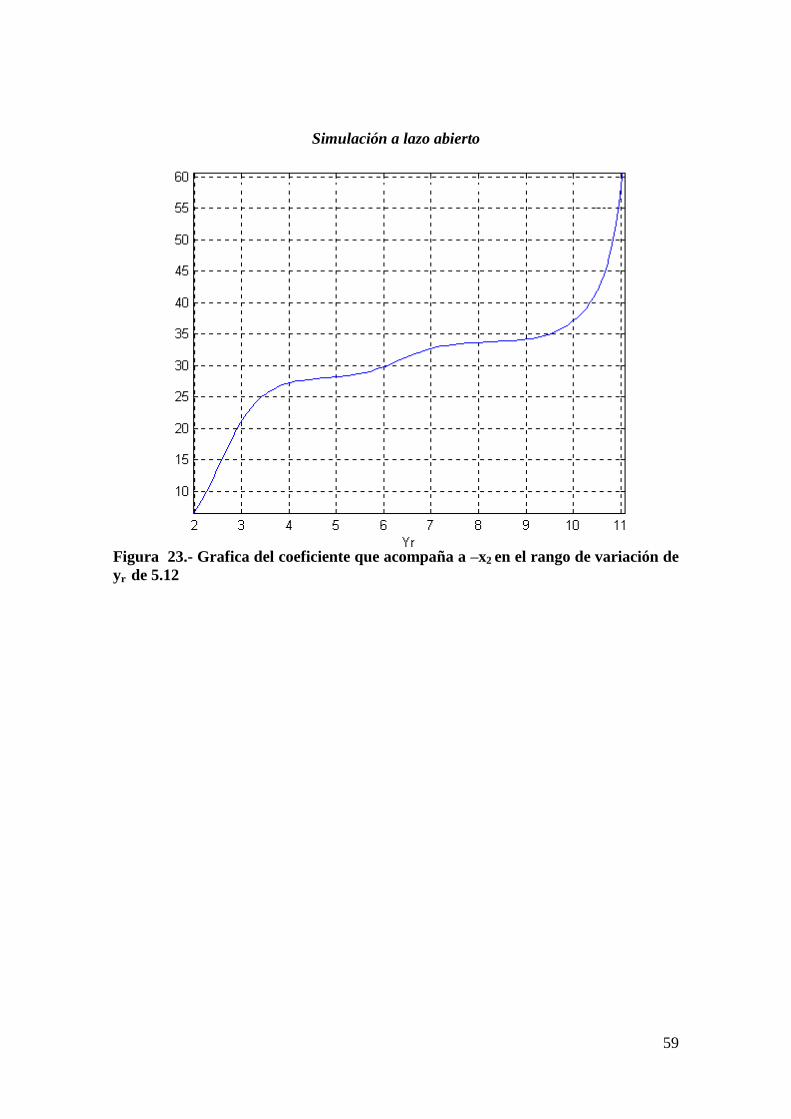
59
Simulación a lazo abierto
Figura 23.- Grafica del coeficiente que acompaña a –x2 en el rango de variación de
yr de 5.12
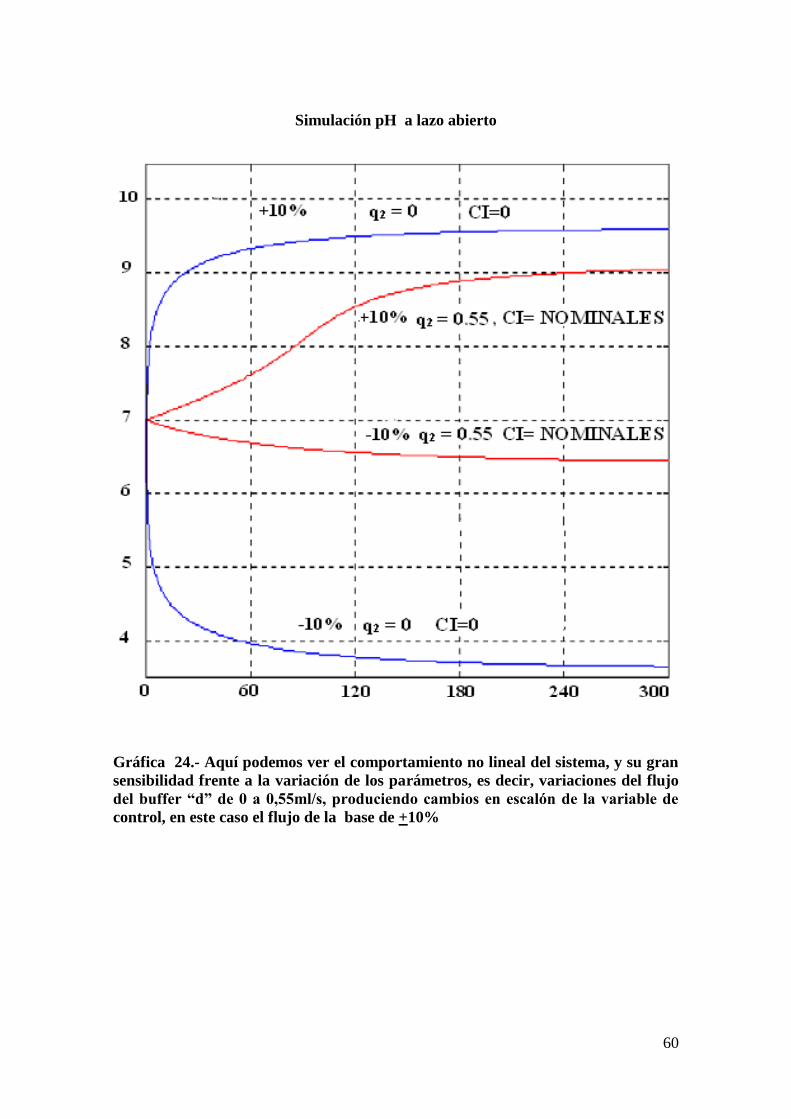
60
Simulación pH a lazo abierto
Gráfica 24.- Aquí podemos ver el comportamiento no lineal del sistema, y su gran
sensibilidad frente a la variación de los parámetros, es decir, variaciones del flujo
del buffer “d” de 0 a 0,55ml/s, produciendo cambios en escalón de la variable de
control, en este caso el flujo de la base de +10%
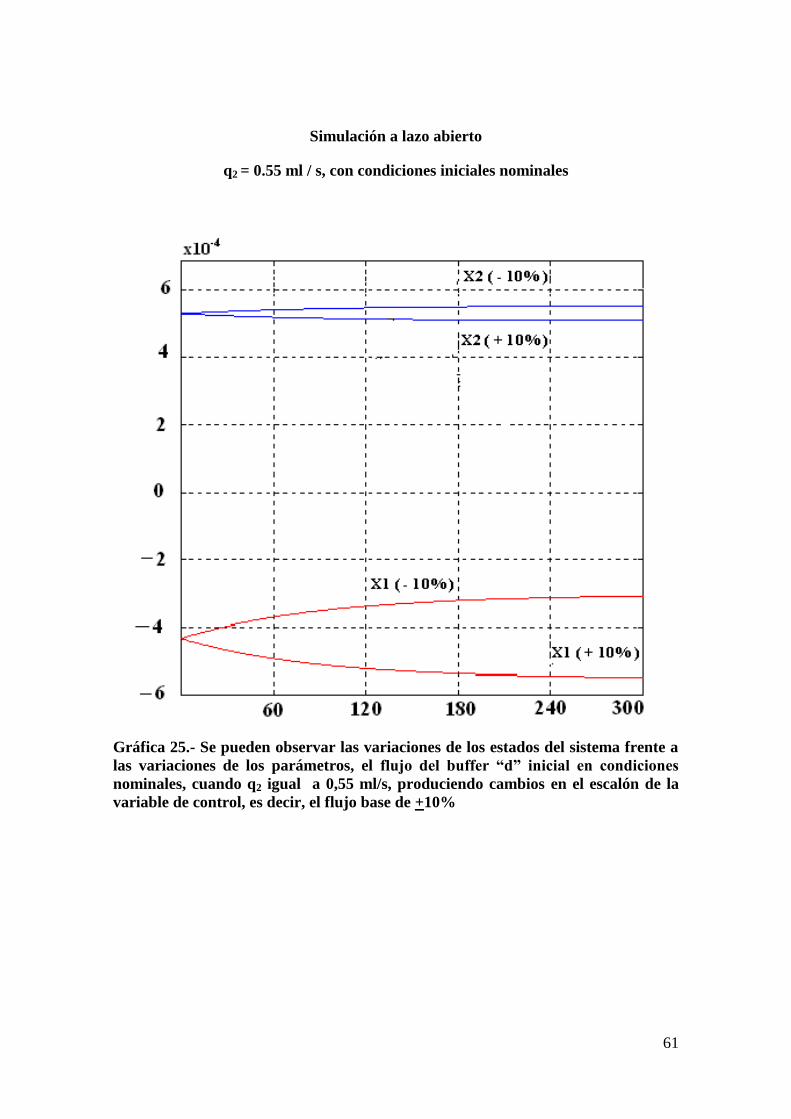
61
Simulación a lazo abierto
q2 = 0.55 ml / s, con condiciones iniciales nominales
Gráfica 25.- Se pueden observar las variaciones de los estados del sistema frente a
las variaciones de los parámetros, el flujo del buffer “d” inicial en condiciones
nominales, cuando q2 igual a 0,55 ml/s, produciendo cambios en el escalón de la
variable de control, es decir, el flujo base de +10%

62
Simulación a lazo abierto
con q2 = 0, condiciones iniciales igual a cero
Gráfica 26.-Donde se pueden observar las variaciones de los estados del sistema
frente a las variaciones de los parámetros, el flujo del buffer “d” igual a cero,
produciendo cambios en escalón de la variable de control, el flujo base de +10%

63
Control mediante Linealización Exacta “Entrada – Salida”:
Este método de control propone buscar un control u que aplicado al sistema no lineal lo
transforme a una forma lineal donde se puede realizar el estudio de estabilidad del
mismo siguiendo los métodos tradicionales para sistemas lineales. Las conclusiones de
estabilidad obtenidas con este método son de validez global, mientras que si realizamos
linealización tradicional en un entorno a un punto de operación, las conclusiones sólo
tendrán validez local. Además no todos los sistemas son linealizables exactamente.
Como sabemos:
Distribuyendo, así obtenemos la ecuación 5.16
Reconocemos los coeficientes de la señal de control u:
………Ecuación 5.15
Ecuación 5.16
……Ecuación 5.17
………Ecuación 5.18

64
Luego la señal del control por linealización exacta es:
donde K1 se elige negativo de tal forma de estabilizar el sistema.
Cálculo de la dinámica de los ceros
Cuando y = yr implica ey = 0.
Definimos el conjunto:
y / ó la dinámica de los ceros será la dinámica del sistema restringida al conjunto Z*, es
decir:
Reempleando:
Teniendo en cuenta que:
………Ecuación 5.19
………Ecuación 5.20
……Ecuación 5.21
………Ecuación 5.23
……Ecuación 5.22
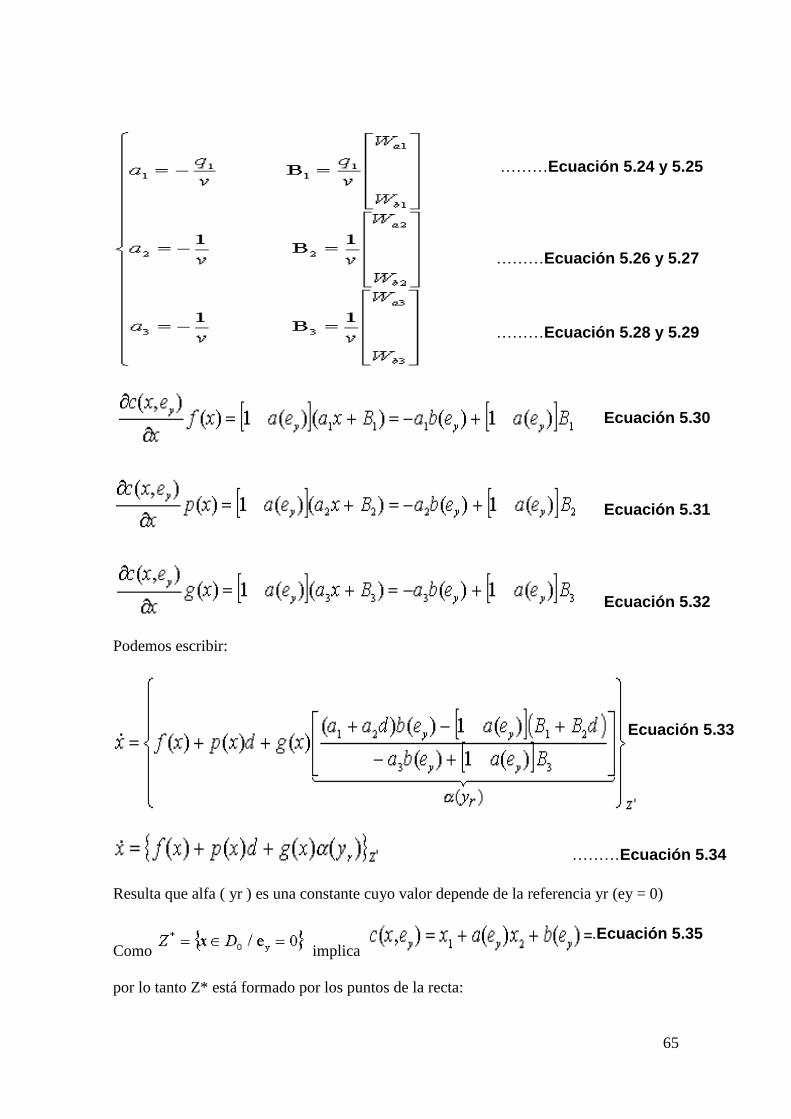
65
Podemos escribir:
Resulta que alfa ( yr ) es una constante cuyo valor depende de la referencia yr (ey = 0)
Como implica
por lo tanto Z* está formado por los puntos de la recta:
………Ecuación 5.24 y 5.25
………Ecuación 5.26 y 5.27
………Ecuación 5.28 y 5.29
Ecuación 5.30
Ecuación 5.31
Ecuación 5.32
.Ecuación 5.35
Ecuación 5.33
………Ecuación 5.34

66
Donde C1 y C2 son constantes dependientes también de yr:
Como las ecuaciones de estado son autónomas ―cada una depende de una sola variable
de estado‖ y además las variables de estado están relacionadas entre sí por medio de una
recta, bastará con demostrar estabilidad asintótica para una y hacerlo extensivo a la otra.
Tomamos la condición Z* y la reemplazamos en la primer ecuación de estado
obteniendo:
Reagrupando:
Este sistema es de la forma lineal con v > 0
Para demostrar que la dinámica de los ceros es asintótica mente estable, sólo se debe
demostrar que. γ (yr)>0.
Ploteamos γ (yr) en el rango de interés yrє [3,11] y observamos que es positivo esto
implica que la dinámica de los ceros es asintótica mente estable en dicho rango, por lo
tanto el sistema será mínima fase en dicho rango.
………Ecuación 5.37
………Ecuación 5.36
Ecuación 5.38
Ecuación 5.39
…Ecuación 5.40
………Ecuación 5.41
.……Ecuación 5.42

67
Estabilidad Entrada - Estado (ISS)
En el ítem anterior se demostró que existe un punto de equilibrio asintótica mente
estable en el origen, además podemos asegurar que en un entornó del origen fo(n,ey) es
continuamente diferenciable y sus derivadas son acotadas, no será necesario el cálculo
de dichas derivadas porque inspeccionando fo(n,ey) se observa que sus derivadas serán
suaves y acotadas en un entorno del origen Se puede asegurar entonces
será ISS en forma local
Acción Integral
Se propone el control con acción integral:
el sistema completo linealizado queda:
Se asume que ή=ƒo(ηey) es ISS en todo el dominio de interés, esto implica que el
estudio de la Estabilidad se reduce al sistema
Para que este sistema sea asintótica mente estable, A deberá ser Hurwitz, implica K1 y
K2 deben ser constantes negativas. El objetivo del control se logra porque se integra el
error ey = y - yr y además el sistema encontrado es asintótica mente estable.
………Ecuación 5.47
………Ecuación 5.43
………Ecuación 5.44
………Ecuación 5.45
………Ecuación 5.46
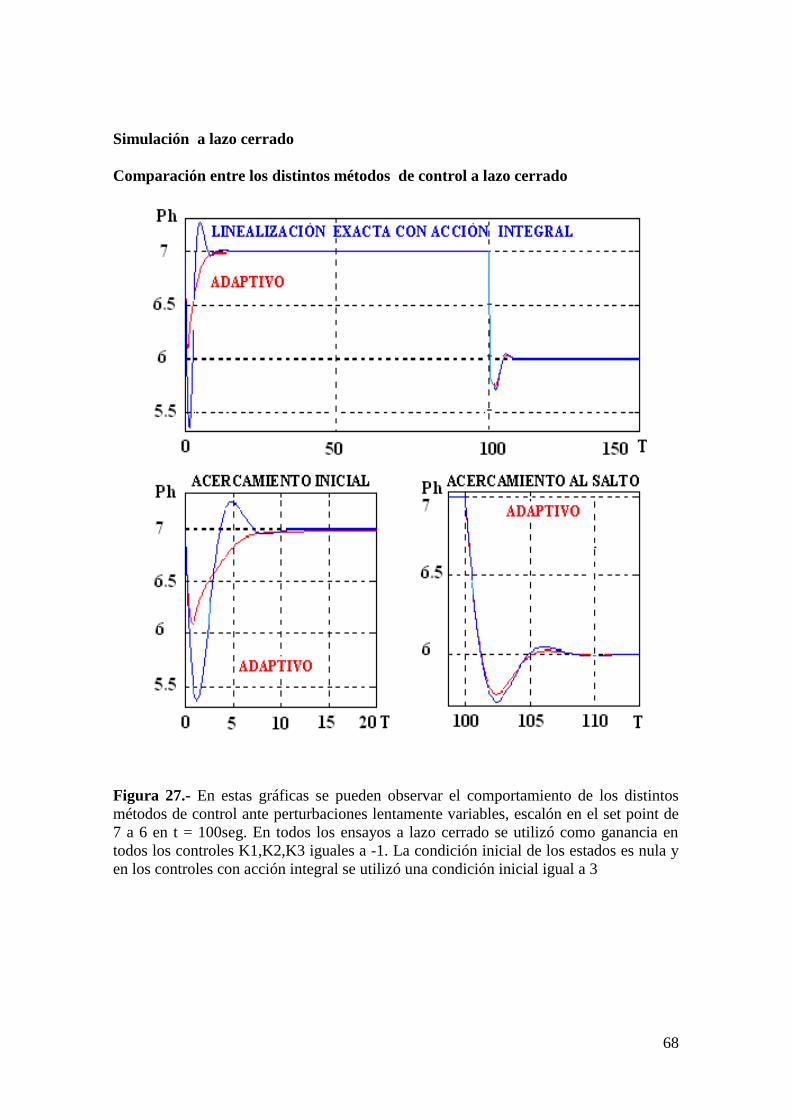
68
Simulación a lazo cerrado
Comparación entre los distintos métodos de control a lazo cerrado
Figura 27.- En estas gráficas se pueden observar el comportamiento de los distintos
métodos de control ante perturbaciones lentamente variables, escalón en el set point de
7 a 6 en t = 100seg. En todos los ensayos a lazo cerrado se utilizó como ganancia en
todos los controles K1,K2,K3 iguales a -1. La condición inicial de los estados es nula y
en los controles con acción integral se utilizó una condición inicial igual a 3

69
Simulación a lazo Cerrado
Figura 28.- En estas gráficas se pueden observar el comportamiento de los distintos
métodos de control ante cambios en el setpoint.
Notamos que el control adaptivo presenta una respuesta temporal más suave que la del
control por linealización exacta.
En cuanto al tiempo de respuesta, ambos se comportan en forma similar
En todos los ensayos a lazo cerrado se utilizó como ganancia en todos los controles
K1,K2,K3 iguales a -1. La condición inicial de los estados es nula y en los controles con
acción integral se utilizó una condición inicial igual a 3
Control Adaptivo
Notar que el término a(x,ey) del control de linealización exacta depende del valor de d.
Cuando este es desconocido, usamos el mismo control ―incluyendo acción integral‖
reemplazando d por una estima (observador no lineal) del mismo d^, obtenida mediante
un estimador a diseñar, el esquema de control resultante es adaptable. En el control por
linealización exacta calculado anteriormente reemplazamos d por su estimado,
resultando:

70
El control adaptivo resulta:
El sistema linealizado queda:
Ecuación5.48
Ecuación 5.49
. .…Ecuación 5.50
..…Ecuación 5.51

71
Para calcular la ley de adaptación del sistema de tal manera que todas las señales del
sistema a lazo cerrado estén acotadas y se logre que la salida ey ―error‖ tienda asintótica
mente a cero realizamos un estudio de estabilidad mediante la siguiente función de
Lyapunov:
Adoptando
Resulta
Finalmente el estimador es:
Así resulta que la derivada de la función de Lyapunov
V=2a1 K1 e2
y
Es semidefinida negativa, lo que significa que todas las señales están acotadas, y como
además el control posee acción integral ey será asintótica mente estable. En conclusión
el error ey tiende asintótica mente a cero cuando el tiempo t tiende a infinito.
.…Ecuación 5.52 .…Ecuación 5.53
….Ecuación 5.54
…….Ecuación .5.57
…….Ecuación .5.58
…….Ecuación .5.59
Ecuación 5.55
Ecuación 5.56

72
Simulación a lazo Cerrado
Figura 29.- En estas gráficas se pueden observar el comportamiento de los distintos
métodos de control ante cambios en d que es la perturbación.
Nuevamente notamos que el control adaptivo presenta una respuesta temporal más
suave que la del control por linealización exacta.
En cuanto al tiempo de respuesta, en este caso el control por linealización exacta
presenta mejor comportamiento.
Escalón de perturbación ―d‖ de 0.55 ml/s a 0 ml/s en t=100seg
En todos los ensayos a lazo cerrado se utilizó como ganancia en todos los controles
K1,K2,K3 iguales a -1.
La condición inicial de los estados es nula y en los controles con acción integral se
utilizó una condición inicial igual a 3.

73
Simulación a Lazo Cerrado
Figura 30.- En estas gráficas se pueden observar el comportamiento de los distintos
métodos de control ante cambios en el flujo de solución ácida ―q1‖ siendo nuevamente
mejor la respuesta del control adaptivo.
Observamos la fuerte no linealidad del sistema en el hecho que cambios simétricos en el
flujo de solución ácida no producen cambios simétricos en el pH.
Cambios de + 25% en el flujo de la solución ácida q1.
En todos los ensayos a lazo cerrado se utilizó como ganancia en todos los controles
K1,K2,K3 iguales a -1. La condición inicial de los estados es nula y en los controles con
acción integral se utilizó una condición inicial igual a 3.

74
CONCLUSIONES
Con la implementación de este prototipo se incorpora un modelo de luz ultravioleta
que operará a diferentes intensidades de luz garantizando la completa purificación del
agua y control de pH.
Por todo esto se intenta implementar el prototipo de planta donde, se apliquen los
procedimientos para la obtención de agua purificada y certificada, desde el momento de
su recepción, es decir agua con calidad de potable hasta su último proceso ó consumo
en beneficio de toda la sociedad que desee implementarlo.
En el mercado existe una gran variedad de equipos comerciales de alta calidad, sin
embargo estos tienen la limitante de que son de procedencia extranjera, por lo tanto de
costos muy elevados, además de que su uso se enfoca principalmente a la purificación
de agua olvidándose de los demás tipos de soluciones como las usadas en los
laboratorios, es por lo cual, que nosotros nos hemos dado a la tarea de implementar un
equipo con elementos disponibles en el mercado nacional y que se puedan usar con
distintas soluciones químicas.
En este trabajo se presentan los resultados de las investigaciones realizadas en el área de
sistemas de control, utilizando estrategias robustas, aplicadas a procesos de control de
pH.
Fundamentalmente se muestran estrategias de diseño de controladores robustos basadas
en métodos frecuenciales, funciones de transferencia y temporales, variables de estado.
Se presentan metodologías para describir las incertidumbres en los sistemas, modelo de
la incertidumbre, tomando en cuenta que los procesos de pH son altamente no lineales y
en el caso considerado en este trabajo, el proceso está sometido a grandes
perturbaciones e incertidumbres en el modelo.
En el enfoque frecuencial, se utilizan los principios basados en la estrategia del
LOOPSHAPING para el cálculo de los controladores. Se describe el procedimiento de
análisis para considerar el tipo y el tamaño de las incertidumbres, que son la base
necesaria para hallar el controlador.
En el enfoque temporal, se utilizan técnicas basadas en los principios de estabilidad de
Lyapunov, las cuales se fundamentan en la definición de funciones de energía para
analizar la estabilidad de los sistemas.
En este caso se presenta la metodología de diseño para la obtención de un controlador
dinámico que utiliza la salida de la planta para su realimentación. Para este diseño, se
trabaja con una incertidumbre del tipo paramétrica estructurada.
El proceso de obtención del controlador es un problema de programación lineal y el
resultado sólo garantiza estabilidad del sistema a lazo cerrado. La incorporación de
elementos dinámicos, integradores y filtros, se presenta, para mejorar el
comportamiento del sistema.

75
BIBLIOGRAFÍA
1.-Katz, J. M.
Importación de tecnología, aprendizaje e industrialización dependiente
Edit. Fondo de Cultura Económica (2° ed., año 1998).
2.-Mateos, J.L.
La tecnología y las prioridades nacionales
Gaceta de la Facultad de Química No. 47
3.-Galbait, J.K. El nuevo Estado Industrial
Edit. Orbis
4.-A. Papoulis, M. Bertrán
Sistemas y Circuitos, Digitales y Analógicos
Marcombo 2° ed., año 1992
5.- Margarita García, Arturo Zepeda
Amplificadores Operacionales
Editorial IPN-ESIME- 3° ed., año 1984
6.- Nacional Instruments
Linear Data book National Semiconductor
National Instruments 4° ed., año 1988
7.- Texas Instruments.
Linear Data book.
Texas Instruments 3° ed., año 1999
8.- Motorola
CMOS Logic Data.
Motorola 4° ed., año 1999
9.- Katsuhiko Ogata
Ingeniería de Control Moderna
Prentice Hall. 2° ed., año 1993
10.- Intel Corporation
Component Data Catalog.
Intel Corporation 2° ed., año 1997
11.- Murray S., Shoemaker R.L.
The IBM Personal Computer from the Inside Out.
Addison – Wesley Publishing Company Inc. 2° ed., año 1999
12.- Richard C. Dorf
Sistemas Modernos de Control
Addison – Wesley Publishing Company Inc. 2° ed., año 1998
13.- Winn L. Rosch.
Hardware Bible.
Brady Publishing Second Edition 1999.
14.- Rafael Sánchez López
Fundamentos y Sistemas Electrónicos para Señales Analógicas.
Ed. Marcombo. 1° ed., año 1990
15.- Kurt Skytte.
Engineering a Small System.
IEEE, March 2° ed., año 1994
16.- A Digital Filter Chip for ECG Signal Processing.
Transactions on Instrumentation’s and Measurement.
IEEE, 2° ed., año 1994

76
17.-James David Jinks
Análisis Químico de los Parámetros del Agua
Limusa 4° ed., año 1998
18.- NTN, EDG, SK.
Manuales de Reemplazo Universal de semiconductores
NTN, EDG, SK 1° ed., año 1998
19.- AMICEE
Instrumentación
Editorial Limusa 2° ed., año 1999
20.- Michael Tisher.
PC Intern System Programming.
145 Abacus 1° ed., año 2002.
77
GLOSARIO DE TÉRMINOS
ACIDIFICACIÓN. Es el incremento de los iones de hidrógeno, comúnmente
expresado como pH en un medio del ambiente.
ADSORCIÓN. Penetración superficial de un gas ó un líquido en un sólido.
AGUA DULCE. Agua que generalmente contiene menos de 1 000 miligramos por litro
de sólidos disueltos.
AGUA DURA. Agua alcalina que contiene sales disueltas que interfieren con algunos
procesos industriales e impiden que el jabón haga espuma.
AGUAS SALINAS. Aguas que contienen cloruro de sodio entre 500 - 3,000 ppm. Se
vuelve más desagradable si la concentración de sal es entre 1,000 y 5,000 ppm.
AGUAS SUPERFICIALES. Toda el agua expuesta naturalmente a la atmósfera ―ríos,
lagos, depósitos, estanques, charcos, arroyos, represas, mares, estuarios, etcétera‖ y
todos los manantiales, pozos u otros recolectores directamente influenciados por aguas
superficiales.
ALCALINIDAD. Capacidad cuantitativa de los medio acuosos para reaccionar ante los
iones hidróxidos. La alcalinidad es un fenómeno que representa la capacidad de
neutralización ácida de un sistema acuoso.
BASE DE DATOS. Colección de datos organizada de tal modo que el ordenador pueda
acceder rápidamente a ella. Una base de datos relacional es aquella en la que las
conexiones entre los distintos elementos que forman la base de datos están almacenadas
explícitamente con el fin de ayudar a la manipulación y el acceso a éstos.
BASIC. Siglas de Beginners All-purpose Symbolic Instruction Code. Es el lenguaje que
se utiliza generalmente en los microordenadores. Es fácil de aprender, ya que la mayoría
de las instrucciones son muy parecidas al inglés.
BATCH. Ver PROCESOS POR LOTES
BCD. Binary Code Decimal
BIT. Dígito Binario ―Binary digt‖ = bit. Un bit matemático puede definir dos niveles o
estados, on/off, blanco/negro, etc.; dos bits pueden definir cuatro niveles, tres bits ocho
y así sucesivamente. En términos de imagen, 8 bits pueden definir 256 niveles de gris
entre el blanco y el negro.
BUCLE. Conjunto de instrucciones que se repiten varias veces seguidas.
BUFFER. Espacio de la memoria que almacena temporalmente una información. En el
caso de las impresoras, el buffer controla la información que se va a imprimir y libera a
la PC de esta tarea.
BUS DE CAMPO. Ver, por ejemplo, ARQUITECTURA DE BUS DE CAMPO
BUS. Ruta interna para transmitir señales digitales de un lado a otro de un sistema.
BYTE. ―kbyte, Mbyte, Gbyte y Tbyte‖. 1 Byte = 8 bits = 256 ―valores discretos de
brillo, color, etc.‖. 1 kilo bite = 1.024 bytes ―no 1000 bytes‖. 1 Mega bite = 1.048.576
bytes ―no 1 millón de bytes‖. 1 Giga bite = 1.073.741.824 bytes ―no mil millones de
bytes‖. 1 Terabyte = 1.099.511.627.776 bytes ―no un trillón de bytes‖. Los chips de
estado sólido generalmente almacenan en incrementos de 1, 4,16 y ahora 64 Mbits que
suelen ir ordenados en grupos de ocho para ofrecer 1, 4,16 ó 64 Mbytes.
CAD/CAM. Siglas inglesas de computer-aided design/computer-aided manufacturing,
o sea diseño asistido por computadora y fabricación asistida por computadora. Es un
software usado para diseñar productos tales como tableros de circuitos electrónicos en
computadoras.
78
CAOS. Conducta de un sistema complejo que aparece como impredecible y falsamente
como aleatoria, cuando en realidad tiene un patrón subyacente. Es extraordinariamente
sensible a pequeños cambios en las condiciones iniciales.
CIBERNÉTICA. Ciencia dedicada al estudio de métodos de comunicación, control y
auto-organización comunes a máquinas y organismos vivos.
CICLO LÍMITE. En un sistema no lineal con una fuente de energía constante es
posible obtener configuraciones en las cuales si el sistema comienza a vibrar u oscilar,
esta vibración u oscilación se conserva en el tiempo. Si este comportamiento opera
independientemente de las condiciones iniciales precisas, a pesar del hecho que el
sistema es lento o a pesar de perturbaciones moderadas que tienden a frenar el proceso o
acelerarlo, entonces tales ciclos se dicen que son ciclos límites. En un sistema lineal si
el sistema es movido éste empieza a vibrar o a oscilar. Sin embargo, de acuerdo a la
segunda ley de la termodinámica, el sistema decaerá hasta el reposo.
CODIFICADOR. ―Encoder‖. Dispositivo de realimentación que convierte un
movimiento mecánico en señales eléctricas, las cuales indican la posición de un
actuador. Se tiene codificadores incrementales y absolutos, dependiendo de si sus
salidas indican cambios incrementales o absolutos de la posición.
COMPILADOR. Programa que pasa un programa escrito en un lenguaje de alto nivel
―parecido al humano‖ al lenguaje de la máquina, de modo que ésta lo entienda
perfectamente. Programa que traduce lenguajes de alto nivel a lenguaje máquina.
COMPORTAMIENTO. Cualquier secuencia de ESTADOS de un sistema.
COMPUTACIÓN. Procesamiento de datos por medios mecánicos y/o eléctricos.
Dispositivos computacionales pueden abarcar tareas tan simples de cálculo del tipo de
costos/beneficios o tan complejas como jugar al ajedrez con buen éxito.
CONCEPTO. Palabra o frase usada en proposiciones que pretenden describir
relaciones verdaderas del mundo. Los conceptos no son ni verdaderos ni falsos,
solamente más o menos útiles.
CONTROL AUTOMÁTICO. Ver SISTEMA DE CONTROL AUTOMÁTICO
CONTROL AVANZADO. Estrategias de control que van más allá del control PID,
tales como el control anticipatorio ―feedforward‖, tiempo muerto ―dead-time‖,
adelanto/atraso ―lead/lag‖, ganacia adaptativa, redes neuronales, control difuso, etc.
CONTROL CON COMPUTADOR “PC Control”. Estrategia de control configurada
a partir de software y la cual usa software y hardware para un computador personal
estándar
CONTROL EN LAZO ABIERTO. Control en el cual la salida no afecta la acción de
control. Es decir, no se mide ni se realimenta la salida para compararla con la entrada.
CONTROL EN LAZO CERRADO. Ver CONTROL REALIMENTADO.
CONTROL ESTADÍSTICO DE PROCESOS. Ver SPC.
CONTROL NUMÉRICO. Control en el cual los datos están representados en forma
de códigos numéricos almacenados en un medio adecuado ―normalmente magnético‖.
Se llaman también sistemas de punto a punto, o de camino continuo.
CONTROL PREDICTIVO. Conjunto de técnicas avanzadas de control que se
caracterizan por que la acción de control es calculada a partir de la predicción de la
evolución del sistema en los instantes de tiempo posteriores al actual. Tiene su origen en
el sector químico y existen múltiples métodos que lo implementan.
CONTROL REALIMENTADO. Operación que, en presencia de perturbaciones
―impredecibles‖, tiende a reducir la diferencia entre la salida de un sistema y alguna
entrada de referencia y lo continúa haciendo con base en esta diferencia.

79
CONTROL. Selección de las entradas de un sistema de manera que los estados o
salidas cambien de acuerdo a una manera deseada. Ver SISTEMA DE CONTROL. Ver
PRINCIPIO DE VARIEDAD NECESARIA
CONTROLADOR ABIERTO “Open controller”. Controlador que se parece a un
PLC tradicional pero que es un PC que opera en un ambiente de Windows con un
software de control
CONTROLADOR DE MODELO INTERNO “IMC”. Parametrización de un
controlador en la cual el modelo es un componente explícito del controlador.
Concretamente, C = Q/ (1 - QG'), donde G' es un modelo y Q es una función de
transferencia estable y propia.
CONVERTIDOR ANÁLOGO-DIGITAL “A/D, ADC”. También llamado
codificador. Dispositivo que convierte, con cierta aproximación
―CUANTIFICACIÓN‖, una señal analógica en una señal digital, usualmente una señal
codificada numéricamente. Con frecuencia un MUESTREADOR/RETENEDOR es una
parte integral de un ADC comercial. Tipos: aproximaciones sucesivas, integración,
contador, paralelo.
CPU. Acrónimo de Central Processing Unit ―Unidad central de procesamiento‖. Es el
procesador central del ordenador encargado de controlar rutinas, realizar funciones
aritméticas y otras tareas propias. Dispone de memoria de acceso rápido. En la
actualidad se le suele descargar de cada vez más tareas gracias a otras unidades
paralelas consiguiendo así un mayor rendimiento.
CUANTIFICACIÓN. Proceso de representar una variable continua por medio de un
conjunto finito de valores distintos ―valores cuantificados‖.
D/A. Acrónimo de Digital/Análogo
DAC. Acrónimo de Digital to Analog Converter ―Convertidor de digital a análogo o
simplemente convertidor digital-análogo‖
DEBUG. Ver DEPURAR.
DECISIÓN. Imposición deliberada de una restricción a un conjunto de posibles
alternativas. En el caso extremo, opción de una alternativa de un conjunto inicialmente
concebible pero ya no disponible, después de la decisión y en virtud de esa decisión, de
cursos de acción, mensajes, objetos, características, etc. El poder de una decisión es
medida por el logaritmo dual de la probabilidad lógica del remanente del conjunto
inicial de posibilidades ―véase información, principio de variedad necesaria, bit‖
DECODIFICADOR. Ver CONVERTIDOR DIGITAL-ANÁLOGO
Degradación: Término aplicado a cualquier proceso de transformación de un sistema,
orden, estructura o sustancia compleja, a un nivel inferior. Así tenemos la degradación
geológica, biológica ―biodegradación‖, química o entrópica.
DEMANDA BIOQUÍMICA DE OXIGENO “DBO”. Oxígeno disuelto y requerido
por los organismos para la descomposición aeróbica de la materia orgánica presente en
el agua. Da la proporción en que desaparece el oxígeno de una muestra de agua y es
utilizado como un indicador de la calidad de efluentes residuales.
DEMANDA DE OXIGENO NITROGENADO “DON”. Medida cuantitativa del
oxígeno disuelto requerido para la oxidación biológica de material nitrogenado, por
ejemplo, el nitrógeno de amonia, el nitrógeno orgánico del agua residual, comúnmente
medido después de que la demanda de oxígeno carbónico ha sido satisfecha.
DIAGRAMA DE FLUJO “FLOW-CHART”. Trazado de la escritura y curso de un
programa en el que se utilizan formas diferentes, como un rectángulo o un cuadrado
para indicar una acción del ordenador y un rombo para las decisiones tomadas por éste.
Normalmente se suele hacer el gráfico o diagrama del programa antes de introducir una
sola línea de éste en el ordenador.

80
DIFUSO “BORROSO”. Técnicas de razonamiento que aplican valores múltiples de
verdad o confianza a las restricciones durante la resolución de problemas. Las técnicas
difusas pueden ser usadas en algoritmos computacionales que imitan al conocimiento
humano para superar la fragilidad de programas que solamente se dirigen a dos posibles
valores, verdadero y falso, en el momento de juzgar opciones. Con este recurso los
programas de inteligencia artificial pueden reconocer matices de verdad o de confianza
y sugerir posibles soluciones aún cuando ninguna sea "cierta"
DINÁMICO. Atributo que acentúa el movimiento, el cambio y el proceso, en oposición
a "estático".
DMA.” Dynamic Memory Access”. Memoria de acceso dinámico. Método de
transferencia de datos desde o hacia la memoria a una alta velocidad, sin participación
de la CPU
DRIVER “Controlador”. Software imprescindible para que cualquier componente
externo sea reconocido por la computadora tras su instalación.
DSP. ―Digital Signal Processor‖. Procesador digital de señales
E/S. Acrónimo de 'Entrada/Salida'. Suele aplicarse al flujo de datos. También es
conocido por su acrónimo inglés 'I/O'
ENSAMBLADOR “ASSEMBLER”. Es un programa que convierte un programa
escrito en lenguaje de ensamble ―assembly language‖ en un código que el
microprocesador puede ejecutar directamente. Lenguaje de programación que utiliza
símbolos y palabras, más difícil de manejar que los lenguajes de alto nivel, pero más
fácil que el lenguaje máquina. También, programa que traduce el lenguaje ensamblador
a lenguaje máquina.
ENTRADA. Cualquier evento externo ―dato, conocimiento u opinión‖ que se provee a
un sistema para modificar el sistema de cualquier manera.
ESPACIO DE ESTADO. Espacio n-dimensional cuyos ejes de coordenadas son las
VARIABLES DE ESTADO
ESTABILIDAD. Condición en la cual las variables críticas de un sistema dinámico se
mantienen invariables o permanecen dentro de unos límites determinados.
ESTADO. Valor numérico de un conjunto de propiedades relevantes de un sistema
ESTOCÁSTICO. Parcialmente aleatorio o incierto, no continúo. Una variable
estocástica no es ni completamente determinada ni completamente aleatoria; en otras
palabras, contiene un elemento de probabilidad. Un sistema que contiene una o más
variables aleatorias es probabilística mente determinado. Razonamiento estocástico es
una técnica de análisis de datos que predice resultados con base en factores
probabilísticos.
FRECUENCIA DE CORTE. La frecuencia a la cual la señal de entrada es atenuada 3
dB por el filtro digital. Los componentes de frecuencia de la señal de entrada por debajo
de la frecuencia de corte son pasados con menos de 3 dB de atenuación.
FRECUENCIA DE NYQUIST. Mínima frecuencia capaz de muestrear con exactitud
una señal analógica. Es siempre el doble de la máxima frecuencia de la señal que se
muestrea. En la práctica se utilizan frecuencias de muestreo mucho más elevadas con
objeto de estar por encima de la frecuencia de Nyquits y evitar el riesgo de que se
produzcan señales extrañas y la fuerte atenuación que, según la curva Sen x/x, existe
alrededor del punto de Nyquits.
FRECUENCIA. Número de veces que se repite un proceso periódico por unidad de
tiempo
FUNCIÓN DE TRANSFERENCIA CONTINUA. La función de transferencia de un
sistema continuo descrito por medio de una ecuación diferencial lineal con coeficientes
constantes ―sistema lineal invariable en el tiempo LTI‖ se define como la relación entre
81
la transformada de Laplace de la salida y la transformada de Laplace de la entrada,
suponiendo que todas las condiciones iniciales son iguales a cero.
FUNCIÓN DE TRANSFERENCIA DISCRETA. La función de transferencia de un
sistema discreto representado por medio de una ecuación en diferencias lineal con
coeficientes constantes ―sistema lineal invariable en el tiempo LTI‖ se define como la
relación entre la transformada Z de la salida y la transformada Z de la entrada,
suponiendo que todas las condiciones iniciales son iguales a cero.
FUNCIÓN. Relación entre dos conjuntos que asigna a cada elemento del primero un
elemento del segundo o ninguno
LENGUAJE DE ALTO NIVEL. Lenguaje de programación parecidos a la lengua del
usuario ―generalmente al inglés‖. Los lenguajes de bajo nivel están más cercanos a los
lenguajes comprensibles para el ordenador. Como los lenguajes de alto nivel han de
pasarse a una forma que el ordenador pueda comprender antes de procesarlos, su
ejecución es más lenta que la de los lenguajes de bajo nivel. Lenguaje de programación
que utiliza instrucciones escritas con palabras comunes.
LENGUAJE DE BAJO NIVEL. Lenguaje parecido al utilizado en el ordenador.
LENGUAJE MÁQUINA. Es el escalón inferior al lenguaje de bajo nivel. Es el
lenguaje que el ordenador entiende directamente.
LENGUAJE. En informática, conjunto de caracteres e instrucciones, utilizado para
escribir programas de ordenador
Ley Cero: Un robot no puede dañar a la humanidad, o a través de su inacción, permitir
que se dañe a la humanidad.
LEY DE VARIEDAD NECESARIA. Un REGULADOR debe tener tanto o más
variedad que el sistema que él regula. Es decir, a mayor variedad de las acciones de un
sistema de control, mayor es la variedad de las perturbaciones que puede compensar. El
CONTROL de un sistema depende de la variedad del regulador y de la capacidad del
canal entre el regulador y el sistema. El cumplimiento de esta ley tiene un costo en
tiempo y recursos. Implicación: es necesario hacer un plan para muchos estados
―situaciones‖ y muchas incertidumbres.
LEY. Declaración, junto con su calificación, que postula una restricción en las
observaciones concebibles y que no es contradicha por las observaciones o contra
ejemplos. Debido a que las leyes excluyen algo, las leyes son construcciones ―no
confundir con hechos observables‖ y a menudo son auto-referenciales.
LEYES DE LA ROBÓTICA. Asimov propuso tres "Leyes de la Robótica", a las
cuales les añadió una cuarta, llamada Ley Cero. Estas son:
LINEAL. Relación proporcional entre dos cantidades ―como en y = cx‖. El término
proviene de la línea recta con la cual tal relación puede ser visualizada. La noción de
linealidad es generalizada para la relación entre más cantidades ―expresada en forma de
ecuaciones lineales‖ a un concepto de tiempo que evoluciona desde un pasado
indefinido a un futuro indefinido sin caminos paralelos o lazos de realimentación. Ver
PRINCIPIO DE SUPERPOSICIÓN
LINEALIZACIÓN. Procedimiento de conversión de un modelo no lineal en uno
lineal, alrededor de un punto de operación seleccionado, por medio de series de Taylor.
LÓGICA DICOTÓMICA. Un método de razonamiento basado en que cada
restricción del problema puede ser considerada verdadera o falsa. La dicotomía
verdadero/falso, una vez aplicada a cada restricción del problema, provee bases para la
ramificación bajo la forma de árboles de decisión. Aristóteles propuso una lógica con
dos valores. La matemática de la lógica de dos valores, sirvió como base durante
muchos años para la mayoría de las estructuras de control en lenguajes de programación

82
LÓGICA DIFUSA. Una forma de razonamiento que incorpora criterios múltiples para
tomar decisiones y valores múltiples para evaluar posibilidades. La lógica difusa difiere
de la dicotómica en este sentido. En lógica dicotómica se espera derivar una solución
decidiendo por sí o por no, si cada una de las restricciones o parámetros es verdadero o
falso, pero en lógica difusa es admisible usar escalas de condiciones ―restricciones‖ y
matices ―flexibilidad‖ en los valores numéricos. En el intervalo [0,1] puede caber
cualquier valor de verdad, sin necesitar ser un número entero. Por ello está algo menos
interesado en la verdad y algo más interesado en la facilidad práctica. Mediante lógica
difusa es posible manipular matemáticamente conceptos definidos con incertidumbre o
vagamente. En lógica difusa los conjuntos se definen mediante funciones de
pertenencia, o membresía, que representan la forma en que los humanos manejan
incertidumbre. Permite volcar numéricamente expresiones del tipo "muy caliente". Se
aplica en teoría del control y en otras ramas de las tecnologías.
LÓGICA MULTIVARIABLE. Las sociedades occidentales han creído desde hace
tiempo en la lógica dicotómica liderada por Aristóteles y sus sucesores. La sociedad
oriental se ha basado en un pragmatismo de forma diferente que admite matices en la
verdad y falsedades parciales. Al analizar en forma subjetiva o intuitiva una restricción
correspondiente a un problema planteado, es frecuente encontrar que mientras algo
suele ser verdadero en la mayoría de las circunstancias, puede no ser así en el caso de
situaciones inesperadas que se introducen en la ecuación. Al usar múltiples valores para
la verdad o la confianza, se le proporciona mayor flexibilidad al proceso de toma de
decisiones.
LÓGICA. Derivado del griego clásico logos ―la razón, principio que gobierna al
universo‖: un conjunto de reglas usadas para gestionar inferencias creíbles. Aristóteles
recomienda una lógica dicotómica, verdadero-falso. Los filósofos orientales se inclinan
más bien a usar una lógica difusa multi-valorada. Ambas técnicas se están usando para
modelar los procesos cognitivos humanos en la computadora.
LSB. Least Significant Bit
MONITOREO. Proceso programado de muestreo o medición y registro subsecuente o
señalización, o ambos, de varias características del medio ambiente, frecuentemente con
el fin de hacer una estimación conforme a objetivos especificados.
PERIFÉRICO. Dispositivo externo o interno que se conecta al ordenador
PERTURBACIÓN. Variable no deseada aplicada a un SISTEMA y la cual tiende a
afectar adversamente el valor de una variable controlada. Si la perturbación se genera
dentro del sistema se denomina interna, en tanto que una perturbación externa se
produce fuera del sistema y es una ENTRADA.
PESO. En inteligencia artificial la palabra "peso" aparece con motivo del nivel de
confianza que en forma abstracta se le confiere a la cantidad de activación que difunde
desde una neurona a las que le siguen en una red neuronal natural o desde un nodo a los
que lo siguen en una red neuronal artificial. Cuando se aumenta el peso de las entradas a
una neurona o nodo, es más fácil lograr superar el umbral de disparo del mismo y se
propaga la señal del potencial de acción.
PLC. Controlador lógico programable ―Programmable Logic Controller‖. Dispositivo
electrónico de propósito especial utilizado en la industria como elemento de control y
monitoreo de máquinas, motores, válvulas, sensores, medidores, etc. Este dispositivo
tiene características de elemento programable y la capacidad de poder conectarse a una
red. Área de aplicación: automatización de industrias y el control de máquinas
industriales, control de líneas de producción, bancos de pruebas.
PRECISIÓN ―accuracy‖. Desviación de una medida de un estándar conocido.
Normalmente se mide en porcentaje
83
PRINCIPIO DE JERARQUÍA. Un sistema siempre está contenido en otro sistema.
Así, cada sistema tiene tanto subsistemas como supersistemas. Implicación: el tener en
cuenta la jerarquía ayuda en el tratamiento de la complejidad al reducir la
INCERTIDUMBRE e incrementar la información del sistema.
PRINCIPIO DE MÍNIMO ESFUERZO. Un sistema tratará de adaptarse a su entorno
o cambiar dicho entorno para satisfacer sus necesidades, de la manera más fácil.
PRINCIPIO DE SEPARACIÓN "Separation principle", "Certainty equivalence
principle". Una estrategia de control óptima puede ser separada en dos partes: un
estimador de estado, el cual da la mejor estimación de los estados a partir de las salidas
observadas, y una ley de realimentación lineal a partir de los estados estimados.
PRINCIPIO DE SUPERPOSICIÓN. Si la respuesta con la entrada f1(x) es y1, con
f2(x) es y2,.. Entonces con la entrada f(x) = f1(x) + f2(x) +... la salida será y = y1 + y2
+.... Es decir, la relación entre la entrada y salida del sistema es una línea recta. Un
sistema es LINEAL si se cumple el principio de superposición.
PRINCIPIO DE VARIEDAD NECESARIA. Ver LEY DE VARIEDAD
NECESARIA.
PROBABILIDAD. Por teoría de probabilidades se conoce a la ciencia que permite
estimar el grado de certeza sobre la base de las condiciones existentes en comparación
con las condiciones históricas. La teoría de la probabilidad se usa en la predicción
climática basada en observaciones y comparaciones con fenómenos previos que
ocurrieron en condiciones similares. Es teoría también se usa en computaciones de
inteligencia artificial para mejorar la posibilidad de lograr una solución a través de
diversas pistas o para aumentar nuestra confianza en la solución. Es una teoría basada
en axiomas, donde están ocultos todos los elementos que el análisis permite hacer
aparecer.
PROBABILÍSTICO. Atributo de los sistemas no DETERMINÍSTICOS en los cuales
las transiciones entre los estados siguen una probabilidades conocidas o determinables.
PROCESAMIENTO DE DATOS. Técnicas eléctricas o mecánicas usadas para
manipular datos para el empleo humano o de máquinas. Por supuesto, dado que se ha
avanzado mucho en la comparación entre computadoras y cerebros, ¿por qué no invertir
la situación y afirmar que el cerebro es capaz de procesar datos?
PROCESAMIENTO PARALELO. Técnica mediante la cual se realizan
simultáneamente muchos niveles de un proceso con el objetivo de aumentar la
velocidad para obtener un rendimiento superior al obtenido por un único procesador.
Con frecuencia se refiere a hardware de ordenadores con procesadores funcionando en
paralelo que llevan a cabo múltiples, y con frecuencia idénticos, cálculos matemáticos al
mismo tiempo. En general los procesadores en paralelo se diseñan
para tareas específicas y no resultan adecuados para ejecutar software complejo. Debido
al sistema de administración y al hecho de que no todos los procesadores terminarán sus
tareas en el mismo momento, causando tiempo de espera, el aumento de velocidad
conseguido al compartir el trabajo no suele ser proporcional al número de canales
disponibles.
Debido a la peculiar estructura de un ordenador con procesamiento en paralelo, el
software diseñado para ser ejecutado en un sistema de procesador único puede llegar a
necesitar grandes cambios para su ejecución en un sistema paralelo.
PROCESO CONTINUO. En un proceso continuo, los materiales de entrada y salida
fluyen de manera continua a través de los equipos, alrededor de un estado estacionario
de operación. No existe un tiempo predefinido de arranque y parada. Una vez se alcanza
el estado estacionario, el proceso se vuelve independiente del tiempo, lo que significa
84
que la conformidad del producto no se ve influida por el tiempo que el proceso lleve
operando. Un PROCESO POR LOTES no es un proceso continuo.
PROCESO POR LOTES “BATCH”. Según la definición dada en la norma S88.01
―ANSI/ISA, 1995‖, un proceso por lotes conduce a la producción de cantidades finitas
de material de salida sometiendo cantidades finitas de material de entrada a un conjunto
ordenado de actividades de proceso sobre un periodo finito de tiempo, usando uno o
más equipos. En estos procesos no existen estados estacionarios de operación como en
un PROCESO CONTINUO. Un proceso por lotes tiene predeterminados los puntos de
comienzo y parada de la operación. Las materias primas son introducidas dentro del
proceso en cantidades predefinidas y procesadas a través de una secuencia específica de
actividades conocida como receta.
PROCESO SEMILOTE. Además de los procesos continuos y por lotes, es común
encontrar combinaciones de ambos conocidas como ―semilote‖, en los cuales se
adiciona continuamente material de entrada sin salida de producto o se remueve
continuamente producto sin la adición de material de entrada.
PROGRAMA. Secuencia de instrucciones que obliga al ordenador a realizar una tarea
determinada. Serie de instrucciones que sigue el ordenador para llevar a cabo una tarea
determinada.
PROCESO. Operación o desarrollo natural progresivamente continúo, marcado por una
serie de cambios graduales que se suceden uno al otro en una forma relativamente fija y
que conducen a un resultado o propósito determinados. Operación artificial o voluntaria
progresiva que consiste en una serie de acciones o movimientos controlados,
sistemáticamente dirigidos hacia un resultado o propósito determinados. Ejemplos:
procesos químicos, económicos y biológicos.
PROTOTIPO. Modelo original sobre el cual se materializa un nuevo patrón y del cual
se derivan representaciones o copias del mismo tipo.
PUERTO. Punto de conexión en la computadora. Los puertos se utilizan para conectar
a la computadora dispositivos tales como impresoras, monitores o módems y para
enviar información desde la computadora a dichos dispositivos. Los puertos utilizados
con más frecuencia son los puertos en serie ―COM‖ y los puertos en paralelo ―LPT‖.
PUNTO DE REFERENCIA. Ver SETPOINT
PWM. Pulse-width modulation ―modulación por ancho de pulso‖. Método de control de
tipo interruptor usado en amplificadores y controladores para controlar el voltaje y
corriente de un motor para obtener mayor eficiencia que un control lineal. PWM se
refiere a tiempos de encendido/apagado variables de los pulsos de voltaje aplicados a
los transistores
RADIACIÓN IONIZANTE. Radiación que produce la ionización en la materia, por
ejemplo, las partículas alfa y beta, los rayos gama, los rayos "X" y los neutrones.
RADIACIÓN. La emisión de partículas atómicas o rayos de energía electromagnética
de longitudes de onda corta, emitidas por los núcleos de algunos átomos. Algunos
elementos son, radiactivos después de ser bombardeados con neutrones u otras
partículas. Los tres tipos más comunes de radiación son los rayos alfa, beta y gama.
Expansión de energía en el espacio. Se distingue la radiación de ondas, la acústica, de
radio, de rayos X, alfa, beta y gama.
RADIACIONES GAMA. Los rayos gama son rayos verdaderos de energía, en
contraste con las radiaciones beta y alfa. Las propiedades son semejantes a los rayos "x"
y a otras ondas electromagnéticas; son las ondas más penetrantes de energía nuclear
radiante pero pueden ser obstruidas por materiales densos como el plomo.
RAM. Acrónimo de Random Access Memory, Memoria de acceso aleatorio. Memoria
de acceso aleatorio que se utiliza tanto para lectura como para escritura. Es la memoria
85
que permite al ordenador mantener el programa en curso de ejecución. Los contenidos
de la memoria RAM se pueden cambiar, mientras que los del ROM no pueden
cambiarse bajo el control del software. Memoria que puede ser utilizada por las
aplicaciones y que desempeña otras tareas necesarias mientras la computadora funcione.
Cuando se apaga la computadora, toda la información almacenada en RAM se perderá.
Vea también Memoria ROM. Memoria de acceso directo, memoria principal del
ordenador, donde residen los programas y datos.
REALIMENTACIÓN. Información de los resultados de un proceso, la cual es
utilizada para cambiar el proceso mismo. Puede ser positiva ―Aumenta el error o
desviación con respecto a un objetivo dado‖ o negativa ―Reduce el error o desviación
con respecto a un objetivo dado‖. Efectos de la realimentación en: ganancia global del
sistema, estabilidad, sensibilidad, reducción del error en estado estacionario, rechazo de
perturbaciones, ancho de banda. Ver TEOREMA DE LA DOMINACIÓN POR
REALIMENTACIÓN
RECURSIVO. Un proceso que se llama a sí mismo creando repeticiones anidadas
―esto es, una dentro de la otra‖, tantas como sean necesarias para arribar al resultado.
Un formalismo en la gramática caracterizado por producciones que revierten hacia
adentro hasta llegar a un número arbitrario de niveles de anidamiento.
RED NEURONAL. Un modelo artificial de neuronas en el cerebro, consistente
usualmente en una computadora provista de nodos o células interconectados que pueden
poseer uno de dos valores, sí o no, con enlaces calibrados para tener valores numéricos
―llamados pesos‖ para dejar pasar flujos de potencial. Dichos flujos adquieren patrones
dictados por el peso de los enlaces.
RED. Servicio de comunicación de datos entre ordenadores. Conocido también por su
denominación inglesa: 'network'. Se dice que una red está débilmente conectada cuando
la red no mantiene conexiones permanentes entre los ordenadores que la forman. Esta
estructura es propia de redes no profesionales con el fin de abaratar su mantenimiento.
Grupo de computadoras conectadas por cables u otros medios y que utilizan software
que les permite compartir dispositivos, como impresoras, e intercambiar información.
REDONDEO DINÁMICO ―Dynamic Rounding‖. El truncamiento inteligente de
señales digitales. Algunos procesos de tratamiento de imágenes requieren que se
multipliquen dos señales, por ejemplo en la mezcla digital, produciendo un resultado de
16 bits a partir de dos números de 8 bits. Esto tiene que truncarse, o redondearse, a 8
bits. Eliminar simplemente los bits más bajos puede dar lugar a artificios de
"contorneado" visibles, sobre todo cuando se manejan imágenes generadas por
ordenador.
REDUCCIONISMO. Doctrina que sostiene que todos los objetos y eventos, sus
propiedades y nuestra experiencia y conocimiento de ellos están constituidos de
elementos últimos, partes indivisibles.
REGLA. Declaración que especifica lo que es permisible bajo ciertas circunstancias. A
diferencia de las LEYES ―que son inevitablemente determinísticas‖ las reglas tienden a
dejar al usuario alternativas y especificar RESTRICCIONES entre las cuales él puede
elegir. Las reglas no implican obligación de actuar.
REGULACIÓN. Proceso de control que hace que una variable dinámica permanezca
fija o cercana a un valor deseado, por medio de una acción correctiva constante.
Ver PRINCIPIO DE VARIEDAD NECESARIA
REGULADOR. Sistema que determina ―selecciona‖ y hace cumplir ―mantiene‖ los
parámetros operativos de otro sistema. El regulador puede ser o no un subsistema del
sistema que está siendo regulado. Algo que bloquea el flujo de VARIEDAD desde las
perturbaciones a las variables esenciales.

86
Relación entre dos conjuntos tal que la VARIEDAD que existe bajo una condición es
menos que la VARIEDAD que existe bajo otra. El total de variedad se define por las
variables que fueron seleccionadas por el observador. Las restricciones reducen esta
variedad a la variedad realmente observada.
RESOLUCIÓN. El cambio detectable más pequeño en una medición, típicamente
expresado en unidades de ingeniería "por ejemplo, 0.1 °C‖ ó como un número de bits.
Por ejemplo, un sistema de 12 bits tiene 4,096 estados de salida posibles. Por lo tanto,
puede medir 1 parte en 4096.
ROBUSTO. En control, poco sensible a errores o incertidumbres de modelado. En la
actividad computacional, tanto una máquina como un algoritmo se consideran robustos
si son capaces de actuar y trascender a pesar de dificultades que accidentarían a
máquinas o algoritmos más simples o menos flexibles. La tolerancia a las fallas o fallos
se considera sinónimo de robustez.
ROM. Acrónimo de Read Only Memory ―Memoria de sólo lectura‖. Memoria que
puede leerse pero no modificarse. Conserva instrucciones y programas indelebles, que
no se pierden al apagar el ordenador.
RUIDO. Entrada indeseada a un sistema cibernético. Típicamente es una
PERTURBACIÓN aleatoria que no representa ninguna parte de un mensaje o señal
deseada de una fuente específica.
SCADA. Control superviso rió y adquisición de datos ―Supervisory Control and Data
Adquisition‖. Un tipo de sistemas que utiliza una computadora convencional en una
aplicación de control de procesos y donde un PLC desarrolla las funciones de control
pero que son monitoreadas y supervisadas por una computadora. Área de aplicación:
líneas de producción, energía eléctrica, petróleo y tanques de almacenamiento, tanques
de abastecimiento de agua.
SENSOR. Dispositivo que convierte un parámetro físico ―como temperatura, presión,
flujo, velocidad, posición‖ en una señal eléctrica. En algunos casos se le considera un
sinónimo de transductor, pro un verdadero sensor contiene un sistema de
acondicionamiento de la señal, de manera que es mucho más sencillo realizar una
medición
SENSÓRICA AVANZADA/SENSORES. Conjunto de dispositivos que permiten
obtener información más o menos compleja de un entorno y, mediante un tratamiento
adecuado de esa información, interactuar con él o con un supervisor ―generalmente un
operario‖.
SEÑAL ANALÓGICA. Señal continua cuya amplitud puede adoptar un intervalo
continúo de valores. Caso especial de señal continua. En la práctica se emplea el
término "tiempo continuo" en lugar de "analógica", pero estrictamente hablando no son
sinónimos ―una señal analógica es continua pero no cuantificada‖.
SEÑAL CONTINUA. Señal que se define sobre un intervalo continúo de tiempo. La
amplitud puede tener un intervalo continuo de valores o solamente un número finito de
valores distintos. Tipos: señal analógica, señal cuantificada.
SEÑAL CUANTIFICADA. Señal continua cuya amplitud puede adoptar un conjunto
finito de valores. Caso especial de señal continua.
SEÑAL DE DATOS MUESTREADOS. Señal discreta en la cual la amplitud puede
adoptar valores en un intervalo continuo. Se puede generar muestreando una señal
analógica en valores discretos de tiempo. Señal de pulsos modulada en amplitud.
SEÑAL DIGITAL. Señal discreta con amplitud cuantificada. Dicha señal se puede
representar mediante una secuencia de números (por ejemplo, binarios). En la práctica
muchas señales digitales se obtienen mediante el muestreo de señales analógicas que
después se cuantifican; la CUANTIFICACIÓN es lo que permite que estas señales

87
analógicas sean leídas como palabras binarias. En la práctica, los términos "tiempo
discreto "y "digital" a menudo se cambian, pero estrictamente hablando no son
sinónimos.
SEÑAL DISCRETA o SEÑAL DE TIEMPO DISCRETO. Señal definida sólo en
valores discretos de tiempo ―la variable t está cuantificada‖. Tipos: señal de datos
muestreados, señal digital. El término "señal de tiempo discreto" es más general que el
término "señal digital".
SERVIDOR. Ordenador que ejecuta uno o más programas simultáneamente con el fin
de distribuir información a los ordenadores que se conecten con él para dicho fin.
Vocablo más conocido bajo su denominación inglesa 'Server'. Computadora que
suministra espacio de disco, impresoras u otros servicios a computadoras conectadas
con ella a través de una red
SERVOMECANISMO. Sistema automático de control de movimiento que usa la
realimentación para controlar una salida deseada como posición, velocidad o
aceleración
SETPOINT ó PUNTO DE REFERENCIA. Valor deseado de la variable controlada,
expresada en las mismas unidades de ésta.
SIMULACIÓN. Operación de un modelo dinámico para obtener una secuencia de
resultados que podrían ocurrir en un sistema del mundo real. Más que calcular
simplemente una solución a un conjunto de ecuaciones, una simulación es una historia
sintética del proceso. Iniciando con un conjunto de condiciones iniciales la simulación
juega por medio de varias clases de eventos que pueden ocurrir.
SISTEMA CERRADO. Sistema aislado que no tiene interacciones con el entorno ―no
confundir con sistema en lazo cerrado‖.
SISTEMA DE CONTROL AUTOMÁTICO. Sistema de control que funciona sin
intervención humana directa. Ver PRINCIPIO DE VARIEDAD NECESARIA
SISTEMA DE CONTROL DISTRIBUIDO. Sistema de control originado a partir de
los ordenadores centrales de control de proceso utilizados en los años 60. Estos sistemas
fueron desarrollados para los procesos de flujo continuo que requerían lazos de
regulación analógicos. Se trata de sistemas en tiempo real y tolerantes a fallos para
aplicaciones complejas de producción por lotes. A lo largo del tiempo han ido
evolucionando, pasando del uso de software y hardware propietarios a sistemas basados
en sistemas operativos como UNIX y Windows NT.
SISTEMA DE CONTROL. Sistema diseñado para lograr que una o varias variables se
comporten de una manera deseada. La variable puede mantenerse constante o cambiar
de una manera determinada. Puede ser realimentado ―feedback control‖ o prealimentado
―feedforward control‖, digital ―microprocesado‖ o analógico ―por ejemplo, circuitos
eléctricos, sistemas hidráulicos, sistemas mecánicos, etc.‖, manual o automático. Ver
PRINCIPIO DE VARIEDAD NECESARIA. La formulación científica de un problema
de control se basa en dos tipos de información: (1) el comportamiento del sistema debe
ser descrito de una manera matemática precisa; (2) el propósito de control ―criterio‖ y el
entorno ―perturbaciones‖ deben ser especificados igualmente de una manera matemática
precisa
SISTEMA DEDUCTIVO. El mecanismo mediante el cual un programa llega a
conclusiones. Algunos programas toman decisiones raídas y tajantes, otros operan en el
mundo de la lógica complicada en la que se permite cierto grado de incertidumbre.
SISTEMA DINÁMICO. Sistema con un número finito de grados de libertad y que
puede ser modelado matemáticamente por medio de ecuaciones diferenciales que
dependen del tiempo.
88
SISTEMA EXPERTO. Un capítulo de la inteligencia artificial que ejecuta, a partir de
una base de conocimientos o de reglas, algunas tareas que normalmente requieren cierto
nivel de experiencia por parte del humano. Estos programas usualmente logran
satisfacer inferencias usando dicho conjunto de reglas para interpretar entradas y
generar una salida que parezca inteligente.
SISTEMA LINEAL. Un sistema es lineal si se cumple el principio de superposición.
Es decir, la relación entre la entrada y salida del sistema es una línea recta.
SISTEMA. Conjunto de elementos unidos y en interacción. Un sistema no
necesariamente es físico y puede aplicarse a fenómenos abstractos y dinámicos, tales
como los que se encuentran en economía. Por tanto, la palabra sistema debe
interpretarse como una implicación de sistemas físicos, biológicos, económicos y
similares.

89
ANEXOS
9.1-EQUIPOS COMERCIALES EXISTENTES Y SELECCIÓN DE LA LAMPARA
En el mercado existe una gran variedad de equipos comerciales de alta calidad, sin
embargo estos tienen la limitante de que son de procedencia extranjera, por lo tanto de
costos muy elevados, además de que su uso se enfoca principalmente a la purificación
de agua olvidándose de los demás tipos de soluciones como las usadas en los
laboratorios, es por lo cual que nosotros nos hemos dado a la tarea d implementar un
equipo con elementos disponibles en el mercado nacional y que se puedan usar con
distintas soluciones químicas. Características de algunos de estos equipos y/o lámparas
germicidas así como el modelo de lámpara seleccionado para llevar a cabo nuestro
prototipo.
Lámpara Ultravioleta de Alta Calidad
Pureflow Ultraviolet ofrece una lámpara con 9,000 horas de uso, rendimiento y vida
garantizada. Toda lámpara completa veintiún pasos en su fabricación y siete controles
de calidad, cada uno comprobado antes de salir de la fábrica. Pureflow confirma su
verificación en cada lámpara con "calidad" en su nombre. Una etiqueta "QUALITY" en
cada lámpara Pureflow comprueba su inspección.
Pureflow Ultraviolet ha suministrado lámparas de alta calidad para equipo ultravioleta
por más de 20 años.
Estandard de las Lamparas Germicida
MODELO #. PARTE MATERIAL Largo
Nominal en
Pulg.
Largo del Arco en
Pulg.
Watts Corriente de la Lampara
mA.
Voltaje de la
Lampara 254nm
Watts Rendimiento en
FW/cm5
G8T5L-S G8-3010 METAL 11.9 8.5 8 170 55 1.8 18
G8T5L-H G8-3011 Ceramica 11.9 8.2 14 400 45 3.0 37
G10T5-1/2L G10-3050 Ceramica 14.0 10.9 16 400 55 5.3 55
G10T5-
1/2VH G10-3052 Ceramica 14.0 10.9 16 400 55 5.3 55
G36T6L G36-3084 Ceramica 33.2 30.0 39 425 120 13.8 120
G36T6VH G36-3087 Ceramica 33.2 30.0 39 425 120 13.8 120
G36T6L-HT G36-3089 Metal 33.2 30.0 39 425 120 13.8 120
G64T5L G64-3098 Ceramica 61.2 58.0 65 425 220 25.0 200
G64T5VH G64-3095 Ceramica 61.2 58.0 65 425 220 25.0 200
90
Figura 9.1 Modelos de lámparas disponibles.
Lámparas UV
Las lámparas UV de Primarc son manufacturadas con materiales de la más alta calidad
y están garantizadas para dar un mínimo de 1,000 horas con máxima eficacia. Aun
después de este período de tiempo, las lámparas todavía son capaz de proporcionar el
90% de su rendimiento original, siempre que hayan tenido la atención adecuada durante
su instalación y funcionamiento. En la fabricación de las lámparas se utiliza cuarzo de la
más alta calidad. Los electrodos y las conexiones están hechos de tungsteno y
molibdeno para asegurar su eficacia, durabilidad y fiabilidad. Considerando la
aplicación específica en que nosotros la vamos a aplicar, utilizaremos las lámparas
Primarc.
Primarc es una compañía que tiene la capacidad de producir lámparas UV para
satisfacer virtualmente cualquier tipo de necesidad y nuestras lámparas de arco de
mercurio de presión media han demostrado que proporcionan alta eficacia y tienen una
larga vida.
Figura 9.2 Lámparas disponibles por Primarc.
Características de los Germicidas Ultravioletas
Los Equipos Germicidas Ultravioleta han sido fabricados para el uso en agua potable; la
generación de rayos ultravioleta dentro del rango de 254 nanometros tiene poder
germicida.
La Unidad Germicida Ultravioleta genera una dosis inicial de 40,000
microwatts/segundo/cm2, después de 7,000 horas de uso normal doméstico e industrial
91
bajan a 1,800 microwatts/segundo/cm2, suficiente para destruir la mayor cantidad de
microorganismos patógenos. A continuación se detallan algunos de ellos y la capacidad
de absorción de rayos ultravioleta para destruir su DNA.
La Luz Ultravioleta es generada por un foco, el cual se encuentra dentro de un
envolvente de acero inoxidable, la radiación de la luz atraviesa el tubo de cuarzo y
contacta con los microorganismos que se encuentran en el agua, estos absorven la
radiación que penetra la membrana o endoplasma llegando al núcleo o DNA de los
mismos, hasta destruirlos.
Nota: la radiación que genera la lámpara no tiene efectos posteriores, por lo tanto NO
ES NOCIVA para la salud del ser humano.
Se recomienda tratar previamente el agua, mediante un filtro de 5 micras para retener
las partículas en suspensión que pudieran escudar a las bacterias. En operación óptima,
la duración del foco es de 6,000 a 7,000 horas aproximadamente (salvo deteriodo por
inadecuado fluído eléctrico), una vez que se ha cumplido este lapso, se recomienda
cambiar dicho elemento (es conveniente cambiarlo cada 10 ó 12 meses de operación).
El agua tratada con germicidas Ultravioletas no altera las características básicas del
agua.
Para su mantenimiento, de cada 10 a 12 meses se debe limpiar el tubo de cuarzo con
aquamonio (amoniaco líquido) y reemplazar el foco Ultravioleta (aunque encienda, para
eficientizar la desinfección del agua).
92
9.2.-CONVERSION DE ANALOGICO A DIGITAL
Un convertidor A/D toma un voltaje de entrada analógico y después de cierto tiempo
produce un código de salida digital que representa la entrada analógica. El proceso de
conversión A/D es generalmente más complejo y largo que el proceso D/A, y se han
creado y utilizado muchos métodos; varios tipos importantes de ADC utilizan un
convertidor D/A como parte de sus circuitos; La temporización para realizar la
operación la proporciona la señal de reloj de entrada; La unidad de control contiene los
circuitos lógicos para generar la secuencia de operaciones adecuada en respuesta.
El comparador con amplificador operacional tiene dos entradas analógicas y una salida
digital que intercambia estados, según qué entrada analógica sea mayor.
La operación básica de los convertidores A/D de este tipo consta de los pasos siguientes
1. El comando de INICIO pasa ALTO, dando inicio a la operación.
2. A una frecuencia determinada por el reloj, la unidad de control modifica
continuamente el número binario que está almacenado en el registro.
3. El número binario del registro es convertido en un voltaje analógico, VAX, por el
convertidor D/A.
4. El comparador compara VAX con la entrada analógica VA, en tanto que, VAX <
VA, la salida del comparador permanece en ALTO, cuando VAX excede a VA por lo
menos en una cantidad = VT ―voltaje de umbral‖, la salida del comparador pasa a BAJO
y suspende el proceso de modificación del número del registro; En este punto, VAX es
un valor muy aproximado de VA, y el número digital del registro, que es el equivalente
digital de VAX, es asimismo el equivalente digital de VA, en los límites de la
resolución y exactitud del sistema.
5. La lógica de control activa la señal de fin de conversión, FDC, cuando se completa el
proceso de conversión.
Características del convertidor analógico a digital
De manera análoga a lo que ocurre con los convertidores digitales a analógico, la
resolución de un convertidor analógico a digital se define de dos maneras.
Primero, es el número máximo de códigos de salida digital. Esta expresión de la
resolución del convertidor es la misma que en el caso del convertidor analógico y se
repite aquí:
Resolución = 2n
La resolución también se define como la razón de cambio del valor en el voltaje de
entrada, Vi, que se necesita para cambiar en 1 LSB la salida digital. Si se conoce el
valor del voltaje de entrada a escala completa, ViFS, que se requiere para producir una
salida digital de todos los unos, es posible calcular la resolución mediante:
Resolución = ViFS 2n - 1
En su forma más simple, la ecuación de entrada-salida de un convertidor digital a
analógico está dada por:
Código de salida digital = equivalente binario de D Donde D es igual al valor decimal
de la salida digital; o sea, D es igual al número de bits menos significativos en la salida
digital y D se calcula a partir de
D = Vi resolución

93
ERROR DE CUANTIFICACIÓN
La salida binaria es 0101 para todos los valores de Vi entre 4.5 y 5.5 V. Existe una
incertidumbre inevitable respecto al valor exacto de Vi cuando la salida es 0101. Dicha
incertidumbre se especifica como error de cuantificación.
Su valor es ±½ LSB.
Al incrementar la cantidad de bits se logra una mejor resolución y el error de
cuantificación es menor, básicamente, la conversión D/A es el proceso de tomar un
valor representado en código digital ―como binario directo o BCD‖ y convertirlo en un
voltaje o corriente que sea proporcional al valor digital.
Figura 9.4.- diagrama a bloques de un convertidor D/A común de cuatro bits
D C B A Vsalida
0 0 0 0 0
0 0 0 1 1
0 0 1 0 2
0 0 1 1 3
0 1 0 0 4
0 1 0 1 5
0 1 1 0 6
0 1 1 1 7
1 0 0 0 8
1 0 0 1 9
1 0 1 0 10
1 0 1 1 11
1 1 0 0 12
1 1 0 1 13
1 1 1 0 14
1 1 1 1 15
Tabla 9.1 Las entradas digitales D, C, B y A se derivan generalmente del registro de
salida de un sistema digital. Los 24 = 16 diferentes números binarios representados por
estos bits

94
Por cada número de entrada, el voltaje de salida del convertidor D/A es un valor
distinto, de hecho, el voltaje de salida analógica Vsal es igual en volts al número
binario. También podría tener dos veces el número binario o algún otro factor de
proporcionalidad.
La misma idea sería aplicable si la salida del D/A fuese la corriente Isal.
En general; Salida analógica = K x entrada digital
Donde K es el factor de proporcionalidad y tiene un valor constante para un DAC dado.
Claro que la salida analógica puede ser un voltaje o una corriente. Cuanto es un voltaje,
K tiene unidades de voltaje y, cuando es una corriente, D tiene unidades de corriente;
Para el DAC de la figura anterior K=1V así que; Vsal = (1V) X entrada
digital
Se puede utilizar la expresión anterior para calcular Vsal para cualquier valor digital de
entrada.
Figura 9.5 .-Diagrama a bloques del convertidor digital analógico
Diagrama de bloques y símbolo de circuito para un convertidor digital analógico (CDA)
básico.
SALIDA ANALÓGICA
Desde el punto de vista técnico, la salida de un DAC no es una cantidad analógica ya
que sólo puede tomar valores específicos, como los 16 posibles niveles de voltaje para
Vsal de la figura 1-2. De este modo, y en este sentido, la salida en realidad es digital, Sin
embargo, como se verá más adelante, se puede reducir la diferencia entre dos valores

95
consecutivos al aumentar el número de diferentes salidas, mediante el incremento del
número de bits de entrada,
Esto permite producir una salida cada vez más similar a una cantidad analógica, la que
cambia de manera continua sobre un rango de valores.
FACTORES DE PONDERACIÓN DE ENTRADA
Para el DAC de la figura 1-2 debe observarse que cada entrada digital contribuye con
una cantidad diferente de salida analógica. Esto se puede apreciar fácilmente si se
examinan los casos donde sólo una entrada es ALTA; A las contribuciones de cada
entrada digital se les asignan factores de ponderación según su posición en el número
binario. Por lo tanto, A, que es el LSB, tiene un factor de ponderación de 1V, B de 2V,
C de 4V, C de 4V y, el MSB tiene el. Mayor, 8V, lo que observamos en la tabla 1-4
Tabla 9.2.- A, que es el LSB, tiene un factor de ponderación de 1V, B de 2V, C de
4V, C de 4V y, el MSB tiene el. Mayor, 8V
Los factores de ponderación se duplican sucesivamente por cada bit, comenzando con el
LSB. Por consiguiente, podemos considerar a Vsal como la suma de los factores de
ponderación de las entradas digitales. Resolución ―tamaño de paso‖
La resolución de un convertidor D/A se define como la menor variación que puede
ocurrir en la salida analógica como resultado de un cambio en la entrada digital.
Haciendo referencia a la tabla de la figura 1-2 podemos apreciar que la resolución es
1V, puesto que Vsal puede variar en no menos que 1V cuando cambie el código de
entrada. La resolución siempre es igual al factor de ponderación del LSB y también se
conoce como tamaño de paso ya que es la cantidad de Vsal. A continuación se muestra
la figura donde se ilustran estas ideas, donde las salidas de un contador binario de cuatro
bits son las entradas al DAC.
D C B A Vsalida
0 0 0 1 1
0 0 1 0 2
0 1 0 0 4
1 0 0 0 8
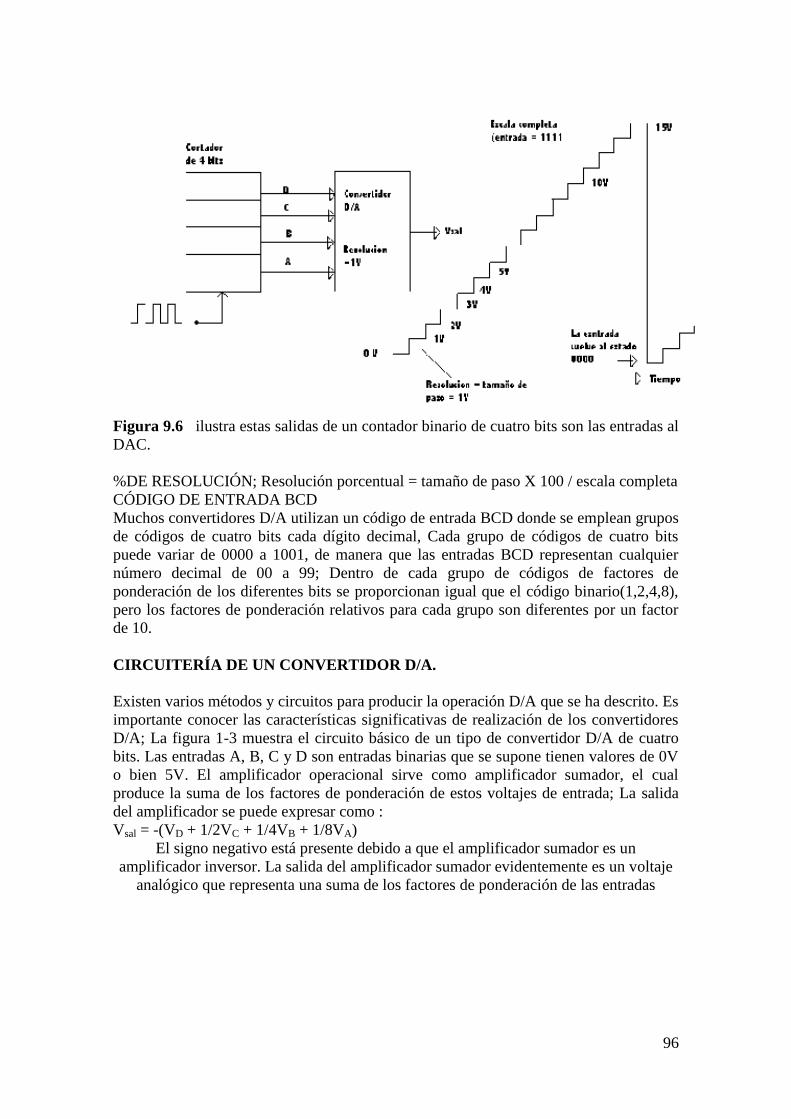
96
Figura 9.6 ilustra estas salidas de un contador binario de cuatro bits son las entradas al
DAC.
%DE RESOLUCIÓN; Resolución porcentual = tamaño de paso X 100 / escala completa
CÓDIGO DE ENTRADA BCD
Muchos convertidores D/A utilizan un código de entrada BCD donde se emplean grupos
de códigos de cuatro bits cada dígito decimal, Cada grupo de códigos de cuatro bits
puede variar de 0000 a 1001, de manera que las entradas BCD representan cualquier
número decimal de 00 a 99; Dentro de cada grupo de códigos de factores de
ponderación de los diferentes bits se proporcionan igual que el código binario(1,2,4,8),
pero los factores de ponderación relativos para cada grupo son diferentes por un factor
de 10.
CIRCUITERÍA DE UN CONVERTIDOR D/A.
Existen varios métodos y circuitos para producir la operación D/A que se ha descrito. Es
importante conocer las características significativas de realización de los convertidores
D/A; La figura 1-3 muestra el circuito básico de un tipo de convertidor D/A de cuatro
bits. Las entradas A, B, C y D son entradas binarias que se supone tienen valores de 0V
o bien 5V. El amplificador operacional sirve como amplificador sumador, el cual
produce la suma de los factores de ponderación de estos voltajes de entrada; La salida
del amplificador se puede expresar como :
Vsal = -(VD + 1/2VC + 1/4VB + 1/8VA)
El signo negativo está presente debido a que el amplificador sumador es un
amplificador inversor. La salida del amplificador sumador evidentemente es un voltaje
analógico que representa una suma de los factores de ponderación de las entradas

97
digitales.
Figura 9.7.-Muestra el circuito básico de un tipo de convertidor D/A de cuatro bits. Las
entradas A, B, C y D son entradas binarias que se supone tienen valores de 0V o bien
5V. El amplificador operacional sirve como amplificador sumador, el cual produce la
suma de los factores de ponderación de estos voltajes de entrada; La salida del
amplificador
EXACTITUD DE LA CONVERSIÓN
La aproximación que logre este circuito al producir estos valores depende
principalmente de dos factores:
1. La precisión de los resistores de entrada y retroalimentación.
2. La precisión de los niveles de voltaje de entrada.
ESPECIFICACIONES DEL DAC. .
Se dispone de una amplia variedad de DAC como CI o bien como paquetes
encapsulados auto-contenidos. Uno debe estar familiarizado con las especificaciones
más importantes de los fabricantes a fin de evaluar un DAC en una determinada
aplicación.
Resolución: Depende únicamente del número de bits.
Por esta razón, los fabricantes por lo general especifican una resolución de DAC como
el número de bits.
Precisión: Un DAC tiene varias maneras de especificar la precisión. Las dos más
comunes se les llaman error de escala completa y error de linealidad, que normalmente
se expresan como un porcentaje de la salida a escala completa del convertidor ―% F.S.‖.
Tiempo de establecimiento: La velocidad de operación de un DAC por lo general se
especifica dando su tiempo de establecimiento, que es el tiempo requerido para que la
salida del DAC cambie desde 0 hasta su valor a escala completa cuando todos los bits
de la entrada binaria cambia de 0 a 1. Los valores más comunes para el tiempo de
establecimiento se encuentran entre 50 ns y 10ns.
Voltaje de offset: Desde el punto de vista ideal, la salida de un DAC siempre es cero
cundo todos los bits de la entrada son cero.
Sin embargo, en la práctica, para esta situación existe un voltaje muy pequeño en la
salida, lo cual genera un error de offset.
Este error, si no se corrige, se suma en todos los casos a la salida esperada del DAC.
Monoticidad:

98
Un DAC es monotónico su salida aumenta a medida que la entrada binaria se
incrementa de un valor a otro.
Otra forma de describir esta característica es que la salida en escalera no tendrá pasos
hacia abajo a medida que la entrada aumenta desde cero hasta su valor de escala
completa. .
CARACTERÍSTICAS DEL CONVERTIDOR DIGITAL A ANALÓGICO
Se plantearán 3 preguntas cuyas respuestas describen las características más importantes
de un convertidor digital a analógico.
1. Cuantos valores de salida puede proporcionar el convertidor digital a analógico
2. Cuanto cambiará el voltaje de salida analógica en respuesta a un cambio en el bit
menos significativo de la palabra digital de entrada
En la siguiente figura 1-4 se muestra el símbolo del circuito y las características de
salida-entrada de un convertidor digital a analógico de 4 bits:
La resolución se define en dos formas:
a) La resolución es el número de valores distintos de salida analógica que pueden ser
suministrados por un convertidor digital/analógico.
En el caso de un convertidor de n bits, se tiene: Resolución =
2n
b) La resolución se define también como la razón del cambio en el voltaje de salida
producido por un cambio de bit menos significativo en la entrada digital.
3. ¿Cual es el cambio en el voltaje de salida analógica producida por una palabra digital
de entrada?
En el caso de un convertidor analógico a digital, la función de transferencia o la
ecuación de entrada-salida contesta dicha pregunta. Esta ecuación se obtiene al
multiplicar la resolución por el cambio en la entrada digital dada en bits menos
significativos.
En forma de ecuación, esto se expresa así:
Vo = resolución X D
donde Vo es el voltaje analógico de salida, la resolución está dada por la ecuación
: Resolución = VoFS /2n - 1
y D es el valor decimal de la entrada digital
9.3.-NORMA OFICIAL MEXICANA
NORMA OFICIAL MEXICANA NOM-179-SSA1-1998, VIGILANCIA Y
EVALUACION DEL CONTROL DE CALIDAD DEL AGUA PARA USO Y
CONSUMO HUMANO, DISTRIBUIDA POR SISTEMAS DE ABASTECIMIENTO
PUBLICO
En la elaboración de esta Norma Oficial Mexicana participaron las unidades
administrativas e instituciones siguientes:
SECRETARIA DE SALUD Comisión Federal para la Protección contra Riesgos
Sanitarios Dirección General de Salud Ambiental Laboratorio Nacional de Salud
Pública
SECRETARIA DE MEDIO AMBIENTE Y RECURSOS NATURALES Comisión
Nacional del Agua: Gerencia de Ingeniería Básica y Normas Técnicas; Gerencia de
99
Saneamiento y Calidad del Agua; y Gerencia de Agua Limpia Instituto Mexicano de
Tecnología del Agua (IMTA)
GOBIERNO DEL DISTRITO FEDERAL Dirección General de Construcción y
Operación Hidráulica (DGCOH)
SISTEMA INTERMUNICIPAL DE LOS SERVICIOS DE AGUA POTABLE Y
ALCANTARILLADO DE LA ZONA METROPOLITANA (SIAPA) DE
GUADALAJARA
COMISION DE AGUAS DEL ESTADO DE MEXICO (CAEM)
La vigilancia de la calidad del agua para uso y consumo humano, tiene como objetivo
prevenir la transmisión de enfermedades infecciosas y parasitarias, así como las
derivadas de la continua ingestión de sustancias tóxicas que puede contener el agua
abastecida a la población.
La vigilancia debe consistir en programas estructurados por las autoridades
competentes, para evaluar el control de calidad que llevan a cabo los organismos
operadores de los sistemas de abastecimiento y, en función de estos programas,
apoyarlos a fin de que se garantice el suministro de agua potable a la población.
En este sentido, la Secretaría de Salud elabora la presente Norma Oficial Mexicana con
la finalidad de mejorar el control sanitario del agua para consumo humano, que es
distribuida por sistemas de abastecimiento público.
1. Objetivo y campo de aplicación
1.1 Esta Norma Oficial Mexicana establece los requisitos y especificaciones que
deberán observarse en las actividades de control de la calidad del agua para uso y
consumo humano.
1.2 Esta Norma Oficial Mexicana es de observancia obligatoria en todo el territorio
nacional y es aplicable a todos los organismos operadores de los sistemas de
abastecimiento público.
2. Referencias
2.1 NOM-127-SSA1-1994
Salud ambiental. Agua para uso y consumo humano. Límites permisibles de calidad y
tratamientos a que debe someterse el agua para su potabilización.
2.2 NOM-012-SSA1-1993
Requisitos sanitarios que deben cumplir los sistemas de abastecimiento de agua para
uso y consumo humano públicos y privados.
2.3 NOM-013-SSA1-1993
Requisitos sanitarios que debe cumplir la cisterna de un vehículo para el transporte y
distribución de agua para uso y consumo humano.
2.4 NOM-014-SSA1-1993
Procedimientos sanitarios para el muestreo de agua para uso y consumo humano en
sistemas de abastecimiento de agua públicos y privados.
1.1 Esta Norma Oficial Mexicana establece los requisitos y especificaciones que
deberán observarse en las actividades de control de la calidad del agua para uso y
consumo humano.
1.2 Esta Norma Oficial Mexicana es de observancia obligatoria en todo el territorio
nacional y es aplicable a todos los organismos operadores de los sistemas de
abastecimiento público.
2. Referencias
2.1 NOM-127-SSA1-1994
Salud ambiental. Agua para uso y consumo humano. Límites permisibles de calidad y
tratamientos a que debe someterse el agua para su potabilización.
100
2.2 NOM-012-SSA1-1993
Requisitos sanitarios que deben cumplir los sistemas de abastecimiento de agua para
uso y consumo humano públicos y privados.
2.3 NOM-013-SSA1-1993
Requisitos sanitarios que debe cumplir la cisterna de un vehículo para el transporte y
distribución de agua para uso y consumo humano.
2.4 NOM-014-SSA1-1993
Procedimientos sanitarios para el muestreo de agua para uso y consumo humano en
sistemas de abastecimiento de agua públicos y privados.


















