T E S I S - Instituto Politécnico...
143
s INSTITUTO POLITÉCNICO NACIONAL CENTRO DE INVESTIGACIÓN EN CIENCIA APLICADA Y TECNOLOGÍA AVANZADA UNIDAD LEGARIA DESARROLLO DE MICROSCOPÍO ELECTROQUÍMICO PARA CARACTERIZACIÓN DE MATERIALES T E S I S QUE PARA OBTENER EL GRADO DE: DOCTOR EN TECNOLOGÍA AVANZADA PRESENTA JOAQUÍN GUILLÉN RODRÍGUEZ Director: Dr. Martín G. Zapata Torres México, D.F., Diciembre de 2009
Transcript of T E S I S - Instituto Politécnico...

s
INSTITUTO POLITÉCNICO NACIONAL
CENTRO DE INVESTIGACIÓN EN CIENCIA APLICADA Y TECNOLOGÍA AVANZADA
UNIDAD LEGARIA
DESARROLLO DE MICROSCOPÍO ELECTROQUÍMICO PARA
CARACTERIZACIÓN DE MATERIALES
T E S I S QUE PARA OBTENER EL GRADO DE:
DOCTOR EN TECNOLOGÍA
AVANZADA
PRESENTA
JOAQUÍN GUILLÉN RODRÍGUEZ
Director: Dr. Martín G. Zapata Torres
México, D.F., Diciembre de 2009

ii

iii
DEDICATORIA Esta tesis está dedicada al Dr. Álvaro Zapata Navarro, siempre lo recordaré por nuestras discusiones académicas, por su habilidad para corregirme las incontables veces que estuve equivocado y porque me dejó sin su asombroso conocimiento, sus maravillosas ideas y su increíble don de curiosidad en mi incipiente carrera como investigador. Dondequiera que se encuentre Ud. Doc., le doy gracias desde lo más profundo de mi ser por haber sido mi asesor.
iv

AGRADECIMIENTOS A Ramtha , a quien seguramente le importa un comino si yo obtuve un grado académico mayor en mi vida, sin duda un líder espiritual extrovertido y con un estilo singular e inusual de enseñar el sendero místico de la vida, sin sus enseñanzas no hubiese podido enfrentar los retos de los últimos años en mi vida. Al Dr. Martín Zapata, mi asesor, quien me aceptó como su estudiante y relevó a su mejor amigo en las múltiples tareas y retos que dejó pendientes. A mi esposa, quien ha tenido la paciencia de soportar mis ausencias a causa de mis estudios, con cada momento que paso a su lado me doy cuenta que es la manifestación del amor más profundo que pude haber encontrado en mi vida. A mi madre, quien en su eterna preocupación por mi bienestar vive orando para que no me pase nada malo en el Distrito Federal. A mi padre, quien no necesito tener ningún estudio académico para ser un gran ejemplo para mi. A mis hermanas Lupita, Tere y Nora, quienes compartieron conmigo muchos momentos de felicidad durante mi niñez y con quien quisiera compartir muchos momentos ahora que finalizo esta etapa de mi vida. A mis compañeros Erick, Alfredo, Nadia, Alicia, Conchita, Efrain, Gaby, Alex, Bruno, ,Julia, Matti, Arianee y demás amigos que estuvieron cerca y con los que compartí muchos momentos en mi tránsito como estudiante de Doctorado. A mi Tía Rosa y a mis primas Olivia, Isela, Nena y Erika quienes me abrigaron en su hogar durante mi estancia final en el Distrito Federal para poder terminar mis estudios . Al Lic. Héctor Núñez, Ing. Tomás Zapata, Ing. Jorge Hernández, Ing. Guillermo Villasana, Ing. Fernando Olivares, Ing. Narciso Herrejón y al estudiante Luis Gilberto Infante quienes de una u otra manera participaron apoyándome fuertemente para que yo pudiese realizar mis estudios de Doctorado. A todas aquellas incontables personas que me dieron alegría y motivación durante la travesía de un nuevo ciclo en mi vida.
v
INDICE LISTA DE FIGURAS viii LISTA DE TABLAS x ABSTRACT xi RESUMEN xii CAPÍTULO 1 INTRODUCCIÓN 1.1 Antecedentes 1 1.2 Justificación 3 1.3 Hipótesis 3 1.4 Objetivos 3 1.5 Organización del Trabajo 4 CAPÍTULO 2 MICROSCOPÍA ELECTROQUÍMICA 2.1 Introducción 5 2.2 Ultramicroelectrodos 6 2.3 Modos de retroalimentación y curvas de acercamiento 8 2.4 Amperometría 10 2.5 Voltametría Cíclica 13 2.6 Aplicaciones 15 CAPÍTULO 3 INSTRUMENTACIÓN 3.1 Introducción 18 3.2 Instrumentación implementada 19
3.2.1Posicionador 20 3.2.2 Servoamplificadores 22 3.2.3 Controlador de Movimientos 30 3.2.4 Potenciostato/Galvanostato 37 3.2.5 Tarjeta de Adquisición de Datos 38 3.2.6 Cajas de distribución de señales 39
3.3 Ventajas de la instrumentación 42 CAPÍTULO 4 SOFTWARE 4.1 Filosofía del Software Desarrollado 44 4.2 Interfaces del Software ejecutándose en la PC 46
4.2.1 Interfaz Común 46 4.2.2 Interfaz de la Configuración Inicial del Experimento 46 4.2.3 Interfaz de Generación de Curvas de Acercamiento 47 4.2.4 Interfaz de Morfología de Superficies 49 4.2.5 Interfaz de Caracterización del Material Ferroeléctrico 50 4.2.6 Interfaz del Análisis de ciclos de Histéresis 53
vi
CAPÍTULO 5 RESULTADOS Y ANÁLISIS 5.1 Implementación del SECM 55 5.2 Resultados de Voltamperometría cíclica sobre UME´s 58 5.3 Resultados del Software implementado en la PC 60
5.3.1 Curvas de Acercamiento 60 5.3.2 Morfología de superficies 61 5.3.3 Mapeo químico 63 5.3.4 Caracterización de materiales ferroeléctricos 64
CAPÍTULO 6 CONCLUSIONES, APORTACIONES Y PROPUESTA DE TRABAJOS FUTUROS 5.1 Conclusiones 69 5.2 Aportaciones 69 5.3 Trabajos futuros 70 REFERENCIAS 72 ANEXO A SOFTWARE UTILIZADO EN EL DESARROLLO DEL SECM ANEXO B ALGORITMOS DEL SOFTWARE DESARROLLADO ANEXO C PRODUCTIVIDAD CIENTÍFICA Carta de aceptación de artículo requisito para grado académico de doctorado Contenido de artículo publicado Participación en congresos y premios obtenidos durante el programa doctoral
vii

LISTA DE FIGURAS CAPÍTULO 2 MICROSCOPÍA ELECTROQUÍMICA
2.1 Fabricación de Microelectrodo 7 2.2 Microelectrodo dentro de una celda 8 2.3 Microelectrodo lejos y cerca de superficie dieléctrica y conductora 8 2.4 Curvas de acercamiento (A) Sustrato conductor (B) Sustrato dieléctrico, IT= i/ iT,∞ y
L=d/a 10
2.5 Perfil de concentración de la especie electroactiva cerca del UME 13 2.6 Voltamogramas de un electrodo de(A) Pt de 2mm de diámetro (B) Pt de 10μm de
diámetro 14
2.7 Representación del modo directo del SECM 16 CAPÍTULO 3 INSTRUMENTACIÓN
3.1 Componentes típicos de un SECM 18 3.2 Componentes del SECM construido 19 3.3 Posicionador del SECM 20 3.4 Operación de los encoders Renishaw 21 .3.5 A) Montaje de encoder B) Fotografía de encoder Renishaw y su cinta 21 3.6 Señales de cada eje del posicionador Fibermax de Aerotech Inc. 22 3.7 ServoAmplificador de la serie BA de Aerotech Inc. 23 3.8 Diagrama funcional del servoAmplificador de la serie BA de Aerotech Inc. 24 3.9 Sistema de conmutación de corriente en un motor sin escobillas 25
3.10 Conmutación de corriente en las fases de un motor de acuerdo a la posición del sensor Hall
26
3.11 Puerto de alimentación y salida de las fases del motor 26 3.12 Interruptores de configuración del servoamplificador 27 3.13 Configuración de modo de control de corriente utilizado en un servoamplificador 28 3.14 Conexión de filtros para evitar propagación de ruido a la línea de 60Hz 29 3.15 Alambrado de cables de motor con toroide instalado 29 3.16 Puerto de control de servoamplificador 30 3.17 Elementos funcionales de la tarjeta controladora de movimiento(DMC 2133) 31 3.18 Sistema de control de lazo cerrado 31 3.19 tarjeta DB-28104 con 4 puertos DB9F para señales de encoder sen/cos 32 3.20 tarjeta DB-28104 instalada en la controladora de movimientos 33 3. 21 Jerarquía de Niveles de programación en el DMC 2133 34 3.22 Perfil de velocidad y posición de los ejes X y Y para el código escrito 35 3.23 Filtro completo en el dominio s de un eje de la DMC 2133 36 3.24 Potenciostato LPG03 de bank Elektroniks 37 3.25 Tarjeta PCI 6229 de National Instruments 38 3.26 Caja de distribución de señales de la NI DAQ PCI 6229 40 3.27 Caja de Interconexión de todos los equipos del sistema 40 3.28 Fotografía del interior de la caja de interconexión 41 3.29 Diagrama de bloques de la interconexión del SECM(NI.- PCI 6229, EN.- Tarjeta DB-
28104, POT.- LPG03 41
viii

3.30 Técnica de altura constante sobre un sustrato inclinado 42 3.31 Técnica de distancia constante en un recorrido del UME 43
CAPÍTULO 4 SOFTWARE
4.1 Comunicación entre LabView y la DMC 2133 45 4.2 Sincronización entre el software ejecutándose en la PC y la DMC 2133 46 4.3 Interfaz común del software y configuración inicial del experimento 47 4.4 Interfaz para generar curvas de acercamiento 48 4.5 Técnica de altura constante para obtener morfología de superficies 49 4.6 Interfaz para obtener morfología de superficies 50 4.7 Circuito Tower-Sawyer para medir propiedades ferroeléctricas 51 4.8 El potenciostato operando como un operacional ideal 52 4.9 Configuración para caracterización de capacitores ferroeléctricos 52
4.10 Interfaz para realizar caracterización ferroeléctrica 53 4.11 Interfaz para el análisis de histéresis de muestras ferroeléctricas 54
CAPÍTULO 5 RESULTADOS Y ANÁLISIS
5.1 Sistema Físico Completo del SECM 55 5.2 Gráfica de entonación del eje Y para movimientos de 25 micras(2777 cuentas del
encoder) 57
5.3 A)Respuesta del motor X a un movimiento comandado de 25 micras(2777 cuentas del encoder) B) Señal de error (Posición comandada vs. Posición actual) C) Acercamiento de la señal de error
57
5.4 Voltamperogramas para identificación de zonas catódicas A)K3Fe(CN)6 y B)Ru(NH3)6Cl3
59
5.5 Comprobación de comportamiento sigmoidal de UME´s 60 5.6 (A)a y 8b. Curvas de acercamiento UME de 10u y 25u, L=d/a , IT=i/ iT,∞ 61 5.7 A) Comportamiento de la corriente lejos de la superficie-sin eliminación de señal de -
,B)lejos de la superficie con eliminación de señal de 60 Hz C) cerca de la superficie 62
5.8 Fotografía de película con zona pasiva y activa 63 5.9 Niveles de corriente en la frontera de película Pt-BaTiO3 64
5.10 Configuración para caracterizar muestras ferroeléctricas 65 5.11 Caracterización de capacitor PZT a diferentes frecuencias.
A)Configuración utilizando el potenciostato B)Equipo de Radiant Technologies 66
ix

LISTA DE TABLAS
CAPÍTULO 3 INSTRUMENTACIÓN
3.1 Configuración de interruptores de los servoamplificadores serie BA de AeroTech Inc 27 3.2 Configuración de interruptores de todos los servoamplificadores en el SECM
construido 28
3.3 Señales utilizadas del puerto de control(DB25F) del servoamplificador 30 3.4 Señales de un puerto DB9F de la tarjeta DB-28104, N=X,Y,Z 32 3.5 Señales del Puerto SCSI III del Potenciostato 37 3.6 Señales utilizadas para la comunicación en la NI DAQ PCI 6229 39
CAPÍTULO 5 RESULTADOS Y ANÁLISIS
5.1 Parámetros PID del filtro del controlador para cada eje 56 5.2 media ± desviación estándar de la polarización remanente y el potencial coercitivo
de capacitores de 4000 y 10000 µ2 de área y 255nm de espesor excitados senoidalmente a 40Hz, 7 volts pico a pico.
67
x

ABSTRACT
This dissertation focuses on the development of instrumentation for scanning
electrochemical microscopy (SECM) using servo systems and a motion controller card to
expand and facility the task possibilities of the SECM.
The positioning system of typical SECM´s are based in step motors, piezoceramic
elements or advanced technology like inchworms motors from Burleigh Instruments. Each
one of these alternatives has advantages and disadvantages. In our SECM we explore a
new alternative for positioning the tip, Servo systems and a motion controller card are
used, we explain and demonstrate several advantages of using this combination in tasks
of electrochemical microscopy.
The SECM developed consists of a combination of familiar electrochemical components
(cell, potensiostat), components for manipulation a tip at high resolution (servo linear
motors, amplifiers and a motion controller card) and acquiring the data ( data acquisition
card, computer).
The software developed to fully control the electrochemical microscope system was
implemented with LabView and a proprietary language of Galil Motion Control Inc. We
synchronize the tasks running on the PC with the subroutines implemented on the motion
card to do several common tasks of electrochemical microscopy.
A diversity of functional modules were implemented with the software, approach curves
over insulating and conductive substrate, constant height technique to obtain images or
chemical maps, and a specialized routine to characterize ferroelectric materials. All of
these task and the results of them are reported in this dissertation.
xi

xii
RESUMEN
El objetivo de este trabajo es el desarrollo de la instrumentación para la construcción de
un microscopio electroquímico (SECM por sus siglas en inglés), usando
servomecanismos y una tarjeta controladora de movimiento con el fin de facilitar las
tareas desarrolladas típicamente en un SECM.
El posicionamiento típico de la mayoría de los SECM´s es basado en motores de paso,
elementos piezocerámicos o tecnologías avanzadas como los motores “inchworm” de
Burleigh Instruments. Cada una de estas alternativas tiene sus ventajas y desventajas.
En nuestro SECM exploramos el control del sistema de posicionamiento del sensor o
microelectrodo, utilizando servomotores lineales y una tarjeta controladora de movimiento,
explicamos y demostramos varias ventajas de usar estos componentes en las tareas de
microscopia electroquímica.
El SECM desarrollado consiste de una combinación de componentes utilizados en
electroquímica (celda y potenciostato), componentes para el desplazamiento del
microelectrodo a alta resolución (servomotores lineales, amplificadores y una tarjeta
controladora de movimiento) y dispositivos para adquisición y procesamiento de datos
(tarjeta de adquisición de datos y computadora).
El software desarrollado para controlar el sistema de microscopía electroquímica fue
desarrollado en LabView y en un lenguaje propietario de la compañía Galil Motion Control
Inc. Las tareas o subrutinas ejecutándose en la PC y en la tarjeta controladora de
movimiento fueron sincronizadas con el fin de realizar diversas tareas de microscopía
electroquímica.
Una variedad de módulos de software fueron integrados para realizar tareas como: curvas
de acercamiento sobre sustratos conductores y dieléctricos, rastreos a altura constante
para obtener morfologías de superficies o mapas químicos, y se integró una rutina
especializada para caracterizar material ferroeléctricos. El resultado de estas
experimentaciones es discutido y reportado en el presente trabajo.

Capítulo 1. Introducción
Página 1
CAPITULO 1
INTRODUCCIÓN
1.1 ANTECEDENTES La microscopía es una herramienta fundamental en la ciencia para estudiar y observar
fenómenos a escala pequeña en muestras u objetos. La microscopía de barrido de sonda
(SPM por sus siglas en ingles) es una rama de la microscopía que obtiene información de
una muestra u objeto a través de la interacción de una sonda o sensor físico con el
material estudiado. El sensor es desplazado sobre la superficie estudiada a través de un
barrido y la medida de las interacciones es registrada en cada posición del sensor, el
conjunto de información obtenida es entonces mapeada en una gráfica la cual representa
típicamente la morfología o imagen del objeto estudiado. Los microscopios de barrido de
mejor resolución son el microscopio de fuerza atómica (AFM por sus siglas en inglés) y el
microscopio de efecto túnel (STM por sus siglas en inglés). El AFM usa como sensor un
cantilever con una punta muy fina integrada en uno de sus extremos, al interactuar la
punta con la muestra se deflexiona el cantilever y se registra esta deflexión para obtener
la morfología de la muestra. El STM utiliza también una punta fina, ésta es de material
conductor y se acerca lo suficiente a una superficie metálica para producir una corriente a
través de un efecto llamado túneleo cuántico, esto sucede cuando hay un potencial
aplicado entre ambas. La corriente leída proporciona un registro de la configuración
electrónica de la muestra conductora en la posición de la punta.
Un microscopio de barrido, que ha llamado la atención del mundo científico en épocas
recientes, es el microscopio electroquímico. La diferencia principal entre el microscopio
electroquímico y los microscopios de fuerza atómica y de túnel estriba en el hecho de que
la interacción entre el sensor y la muestra se realiza dentro de una celda electroquímica,
dentro de la cual se mueve con mucha precisión un microelectrodo por el cual circula una
corriente. El desplazamiento del microelectrodo es muy cercano a una superficie
estudiada y requiere por lo tanto de instrumentación fina para movimientos precisos sobre
la superficie al igual que en el AFM y STM. Aunque no son comparables las resoluciones
obtenidas con el microscopio electroquímico respecto a las obtenidas con otras técnicas
de SPM, su ventaja principal radica en el de poder estudiar fenómenos “in situ” ,

Capítulo 1. Introducción
Página 2
reacciones dentro de soluciones, química de superficies conductoras y dieléctricas entre
otras cosas.
En el mundo de la ciencia están siendo integradas con mayor frecuencia técnicas de
microscopía electroquímica. La obtención de imágenes de alta resolución [1], mediciones
de cinética homogénea y heterogénea [2,3], estudios de sistemas biológicos [4], estudio
de fenómenos en interfaces liquido/liquido [5], la razón de reacción en una amplia
diversidad de superficies [6-8], el estudio del transporte a través de membranas [9],
microfabricación a través de electrodeposición y desgaste entre otras aplicaciones han
sido realizadas con técnicas de microscopia electroquímica.
La instrumentación del microscopio electroquímico está típicamente basada en motores
de paso y/o elementos piezocerámicos, cada uno de ellos tiene sus ventajas y
desventajas. Por un lado el uso de motores de paso requiere acoplamiento de engranes,
bandas y elementos de acoplamiento que dificultan la construcción del SECM, el efecto
de “backlash” evita también un posicionamiento preciso, los elementos piezocerámicos
tienen resolución nanométrica pero están limitados en su recorrido y no se comportan
linealmente.
Diversos grupos han utilizado con éxito la tecnología de motores de paso para el proceso
de posicionamiento [10, 11], los microscopios electroquímicos más precisos utilizan
motores especializados de la compañía Burleigh Instruments [12], este tipo de motores
utiliza tecnología basada en elementos piezoeléctricos alcanzando resoluciones de
movimientos de 4 nm y recorridos de hasta 25mm, sin embargo este tipo de tecnología
requiere de controladores sofisticados y caros además de mantenimiento periódico. Sólo
dos compañías venden comercialmente microscopios electroquímicos, una de ellas es CH
Instruments Inc. [13], en Estados Unidos, y la otra es Uniscan Instruments [14] en
Inglaterra, el software que proporcionan con el instrumento realiza sólo tareas básicas
para realizar experimentación de microscopía electroquímica .
En diversos laboratorios se han hecho mejoras en la instrumentación del microscopio con
el fin de mejorar sus capacidades, el modo de corriente constante [15] , la modulación de
la posición del microelectrodo (TPM por sus siglas en inglés) [1] , El modo de “Shear” [16]

Capítulo 1. Introducción
Página 3
son algunos ejemplos de este tipo de mejoras para crear una mayor nitidez en las
imágenes obtenidas.
En los microscopios electroquímicos existentes no se ha explorado la posibilidad de
utilizar servomecanismos en la labor del posicionamiento ni el uso de tarjetas
controladoras especializadas en tareas de movimiento. La presente tesis describe la
implementación de un microscopio electroquímico cuyo posicionamiento está basado en
servomecanismos, como parte central del sistema se utiliza una tarjeta controladora de
movimientos y un posicionador nanométrico basado en motores lineales, esto con el fin
de lograr una muy alta resolución en los desplazamientos del sensor. El uso de una tarjeta
controladora de movimientos en la instrumentación provee potenciales ventajas sobre los
sistemas desarrollados en la construcción de este tipo de microscopios. El sistema
desarrollado consta también de software especializado para hacer tareas comunes y
útiles al realizar experimentos de microscopía electroquímica, el software además puede
expandirse con el fin de realizar tareas especializadas referentes a la caracterización de
materiales, la cual es una de las áreas de investigación de nuestro grupo.
1.2 JUSTIFICACIÓN Es necesario contar con un equipo confiable y preciso para realizar experimentación de
microscopía electroquímica, el sistema, su instrumentación y su software deben tener
ventajas potenciales respecto a los ya existentes para poder estudiar y caracterizar una
amplia gama de materiales.
1.3 HIPÓTESIS Es posible desarrollar un microscopio electroquímico controlado por un software escalable
utilizando componentes que permitan facilitar la diversidad de tareas de experimentación
que pueden ser realizadas con el mismo.
1.4 OBJETIVOS
• Implementar la instrumentación y el software de control de un microscopio
electroquímico

Capítulo 1. Introducción
Página 4
• Obtener curvas de acercamiento sobre superficies dieléctricas y conductoras
utilizando el microscopio desarrollado
• Obtener la morfología de superficies utilizando el microscopio desarrollado
• Identificar zonas activas y pasivas(mapa químico) de superficies estudiadas
• Desarrollar un módulo de software para caracterizar películas ferroeléctricas
utilizando microscopía electroquímica
1.5 ORGANIZACIÓN DEL TRABAJO Este trabajo se encuentra organizado de la siguiente manera: en el capítulo 2, se discuten
los fundamentos relacionados con la microscopia electroquímica, se describen los temas
de microelectrodos , modos de retroalimentación, curvas de acercamiento, las técnicas de
amperometría y voltametría cíclica sobre microelectrodos y se detallan algunas de las
aplicaciones de la microscopía electroquímica, mencionadas en el primer párrafo de este
capítulo. El capítulo 3 presenta una descripción de toda la instrumentación utilizada en el
microscopio construido, detalles de todo el hardware, junto con las señales utilizadas,
para la sincronización de la diversidad de equipos que lo componen, en la parte final se
describen las ventajas de la instrumentación utilizada versus las instrumentaciones típicas
utilizadas en la mayoría de los microscopios construidos de este tipo y en especial, se
enfatiza el beneficio de usar una tarjeta controladora de movimientos en la tarea del
control de posicionamiento. En el capítulo 4 se presenta la filosofía general de la
operación de todo el software que controla el microscopio, se describen las interfaces del
programa desarrollado para las diferentes tareas que realiza y el módulo desarrollado
para la caracterización de materiales ferroeléctricos; la explicación detallada y algoritmos
del software desarrollado en la PC y en la tarjeta controladora de movimientos son
dejados en apéndices de la presente tesis. En el capítulo 5 se presentan los resultados
de la experimentación realizada con el microscopio, curvas de acercamiento sobre
materiales dieléctricos y conductores, morfología de superficies, mapa químico de
películas y la caracterización de películas ferroeléctricas son mostrados. Finalmente en el
capítulo 6, se presentan las conclusiones finales del trabajo realizado, las aportaciones
fundamentales de éste, y las perspectivas para futuros trabajos.

Capítulo 2. Microscopía Electroquímica
Página 5
CAPITULO 2
MICROSCOPIA ELECTROQUÍMICA
En este capítulo se describen los fundamentos de la microscopía electroquímica, se
explica la operación general del microscopio, se discuten las características y
comportamiento del ultramicroelectrodo utilizado como sensor, la operación de los modos
de retroalimentación y las curvas de acercamiento que se generan al aproximar el
ultramicroelectrodo a una superficie a estudiar. Finalmente se describen los diversos
campos de aplicación donde se ha utilizado el microscopio electroquímico y sus
potenciales usos.
2.1 INTRODUCCIÓN El microscopio electroquímico ha despertado gran interés en la comunidad científica,
debido a sus potenciales aplicaciones dentro de la investigación. El microscopio fue
introducido por Bard y colaboradores [17] a finales de la década de los 80’s, y cada vez
recibe más atención de parte de la comunidad científica debido sobre todo a que una gran
diversidad de procesos pueden ser estudiados in situ.
El microscopio electroquímico (SECM por sus siglas en Inglés), es un microscopio de
rastreo o barrido, en su operación mueve un instrumento o sensor sobre una superficie,
las interacciones de este sensor son registradas y sirven para identificar diversas
propiedades de la superficie bajo estudio. La interacción en el SECM se da a través de un
ultramicroelectrodo (UME), cuya corriente es afectada al estar cerca de una superficie. La
resolución del microscopio está limitada por el tamaño del UME, los cuales
comercialmente existen en el rango de 5 a 25 micras de diámetro, sin embargo en varios
laboratorios se han producido UME´s de varias decenas de nanómetros de radio efectivo
[18]. Como se mencionó en el capítulo previo aún no son comparables las resoluciones
obtenidas en el SECM versus microscopios como el AFM y el STM, sin embargo sus
capacidad de hacer estudios in situ de diversos tipos de especies orgánicas e inorgánicas,
estudios de corrosión [19], estudios de fenómenos de interfaces, estudiar
comportamientos químicos de superficies y realizar modificaciones localizadas de

Capítulo 2. Microscopía Electroquímica
Página 6
materiales a través de reacciones electroquímicas le dan un amplio potencial de uso en el
mundo científico.
2.2 ULTRAMICROELECTRODOS Los ultramicroelectrodos han abierto una gama de aplicaciones muy diversas en la
electroquímica, desde la investigación de su comportamiento en las celdas realizado por
Fleischmann y colaboradores [20], han creado tal vez el área de mayor investigación
dentro de esta ciencia.
El comportamiento de electrodos de solo unas cuantas micras de diámetro difiere
significativamente de electrodos con tamaños milimétricos o mayores, las tres mayores
consecuencias de reducir el tamaño de un electrodo son:
i) Las razones de transportes de masa desde y hacia un UME son
incrementadas
ii) La capacitancia del doble capa entre el electrodo y la solución es
drásticamente reducida
iii) La perdida ohmica (el producto de la corriente por la resistencia de la solución )
es reducida debido a las corrientes sumamente pequeñas en el electrodo
Debido a que en un UME, el tamaño de la capa de difusión de la especie electroactiva
reaccionando con el mismo es similar al tamaño del UME, el transiente de la respuesta de
difusión es reducido hacia una tendencia de transporte de masa en estado estable. El
tiempo de respuesta al cambio de potencial en un UME es muy corto, esto favorece el
hecho de poder mover el microelectrodo en una solución de manera suficientemente
rápida en un experimento de rastreo para obtener una imagen. Un electrodo es
considerado UME cuando al menos una dimensión de él es ≤ 25 μm , este es el tamaño
critico para que su comportamiento tenga las consecuencias listadas previamente.
Existen diferentes geometrías en la forma de un UME, la más común y utilizada es la de
disco en donde un área transversal de forma circular del electrodo (típicamente hecho de
Pt) está en contacto con la solución, esta geometría es relativamente simple en su
fabricación y provee cuantitativamente resultados experimentales muy cercanos a los
modelos teóricos, razón por la cual es preferida respecto a otras. Los otros tipos de

Capítulo 2. Microscopía Electroquímica
Página 7
geometría que se pueden encontrar en un UME son la geometría esférica, hemisférica,
cilíndrica y cónica. Toda la experimentación reportada en esta tesis se realizó
completamente con electrodos comerciales de disco de 10 y 25 micras de diámetro
respectivamente.
Un UME se construye utilizando un alambre microscópico de platino, oro o una fibra de
carbón del tamaño deseado (disponibles comercialmente de tamaño mayor o igual a
5μm), el alambre se coloca dentro de un compartimiento tubular de vidrio con forma de
punta y cerrado por ese extremo, dicho alambre o fibra se conecta con epóxico de plata
dentro del compartimiento, y comparte una conexión eléctrica con un alambre que va
hacia el conector externo. En el extremo de la punta del UME, el alambre se sella y se
desbasta hasta que el alambre tiene contacto con el exterior, después con aluminas de
diferente tamaño (de mayor a menor tamaño) se va puliendo hasta dejarlo preparado para
realizar experimentación con él. La forma exacta como se manufactura este tipo de
puntas de SECM ha sido descrita en detalle por Bard y su equipo de colaboradores [21].
La figura 2.1 muestra de manera gráfica la forms en que está construido un UME .
Fig. 2.1 Fabricación de Microelectrodo

Capítulo 2. Microscopía Electroquímica
Página 8
A través de su punta, el UME se tiene contacto con un medio químico, y al aplicarse un
voltaje en él es producida una corriente que se cierra a través de otro electrodo de la
celda. Para diversos experimentos el UME es movido sobre parte de la superficie a
analizar (plano X-Y) y se controla también la distancia entre la punta y la muestra con
mucha precisión para que no haya un choque entre ambas y esto dañe la muestra y/o la
punta del microelectrodo. La corriente circulando por la punta y el potencial (voltaje)
aplicado a la misma proveen información diversa acerca de la muestra estudiada. La
figura 2.2 muestra una vista lateral de un UME con geometría de disco inmerso dentro de
una especie electroquímica sobre una superficie a estudiar.
Fig. 2.2 Microelectrodo dentro de una celda
2.3 MODOS DE RETROALIMENTACIÓN Y CURVAS DE ACERCAMIENTO Los principios fundamentales de microscopía electroquímica se basan en lo que se
denomina modos de retroalimentación, éstos son los comportamientos que suceden
cuando el UME y la superficie estudiada se encuentran muy cercanos.
Fig. 2.3 Microelectrodo lejos y cerca de superficie dieléctrica y conductora
Microelectrodo dentro de solución
Superficie de la muestra

Capítulo 2. Microscopía Electroquímica
Página 9
Cuando el UME se encuentra lejos de la superficie a estudiar (alrededor de 3 veces o más
el diámetro del mismo) la difusión de la especie electro activa es esférica hacia la punta
del microelectrodo –ver figura 2.3A- y la corriente tiene un valor constante,
denominaremos el valor de esta corriente como iT,∞. Para el caso de una muestra de
dieléctrico perfecto (no hay ninguna reacción en su superficie), el acercamiento de la
punta a la superficie empieza a bloquear la difusión de la especie electroactiva y la
corriente disminuye –ver figura 2.3B-, El decaimiento de la corriente con la disminución de
distancia entre la punta del UME y el sustrato se denomina retroalimentación negativa. En
el caso de que se estudie una superficie conductora el acercamiento del UME a la
superficie produce también bloqueo de la especie electroactiva, sin embargo existe
también la oxidación del producto reducido en el UME en la superficie conductora, éste
producto regresa por difusión a la punta –ver figura 2.3C- y causa un incremento abrupto
de la corriente respecto a iT,∞. El incremento de corriente con la disminución de distancia
entre la punta del SECM y el sustrato se denomina retroalimentación positiva.
La gráfica del comportamiento de una corriente en un UME versus la distancia entre el
mismo y la superficie se llama curva de acercamiento. Las curvas de acercamiento para
un conductor y un aislante perfecto se muestran en la figura 2.4. Las gráficas están
normalizadas , d es la distancia entre el sustrato y la punta del UME y a es el radio del
UME.

Capítulo 2. Microscopía Electroquímica
Página 10
Fig. 2.4 Curvas de acercamiento (A) Sustrato conductor (B) Sustrato dieléctrico, IT= i/ iT,∞ y L=d/a
Las siguientes ecuaciones son aproximaciones que han sido propuestas para estos
comportamientos [22].
(1) IT(L) = [0.292 + 1.5151/L + 0.6553 e (-2.4035/L)] -1
(2) IT(L) =0.68 + 0.78377/L +0.3315e(-1.0672/L)
2.4 AMPEROMETRÍA En la mayoría de los experimentos de microscopía electroquímica los UME´s son
utilizados como electrodos amperométricos, esto es, se mide su corriente durante la
duración de un experimento. Típicamente los procesos estudiados en el SECM son del
tipo catódico por lo que si se tuviera en la solución solamente un par redox, entonces se
estudia la razón de la reacción
(3) Ox + ne- → R
Capítulo 2. Microscopía Electroquímica
Página 11
La carga Q necesitada para electrolizar N moles de la especie Ox está dada por
(4) Q = nFN
Donde
Q: Carga en Coulombs requerida para la reacción
n: numero de electrones transferidos en un evento redox
F: Constante de Faraday
N: número de moles de la sustancia Ox que reaccionan
La corriente debido a la reacción (3) en un tiempo t está dada por
(5) dtdQi =
Donde i está dado en amperes y t en segundos. La razón de la reacción es por definición
dN/dt, por lo que combinando las ecuaciones (4) y (5) la relación entre la corriente
faradaica y la razón de la reacción está dada por
(6) Razón de la reacción (mol/seg)= dtdN
=dtdQ
nF1
=nFi
En los UME´s la máxima corriente está limitada por la velocidad de difusión de la especie
electroactiva al electrodo, esto es la razón de la reacción depende de la velocidad a la
cual puede viajar el material a la superficie del electrodo y no está limitada en este caso
por la cinética de la reacción.
Los fenómenos de convección y migración también colaboran en el transporte de masa de
la especie electroactiva al electrodo, sin embargo en toda la experimentación de esta
tesis se asumen condiciones donde se minimizan dichos efectos, por lo tanto para el
análisis de los resultados de la experimentación, el único fenómeno que participa en la
razón de la reacción es el de difusión. Para un UME en forma de disco la corriente en una
solución lejos de cualquier tipo de sustrato está regido por la ecuación:

Capítulo 2. Microscopía Electroquímica
Página 12
(7) iT,∞ = 4nFC*Da
Donde
n: numero de electrones transferidos en un evento redox
F: constante de Faraday
C* : concentración de la especie electroactiva en el “bulk” de la solución
D: Coeficiente de difusión de la especie electroactiva
a: radio del UME
la ecuación 7 fue reportada por Saito [23] quien además derivó la expresión (8) para el
perfil de concentración alrededor del electrodo
(8) ( ) 2/122222222
*
421
arctan21azazrazr
aCC
+−++−+−≡π
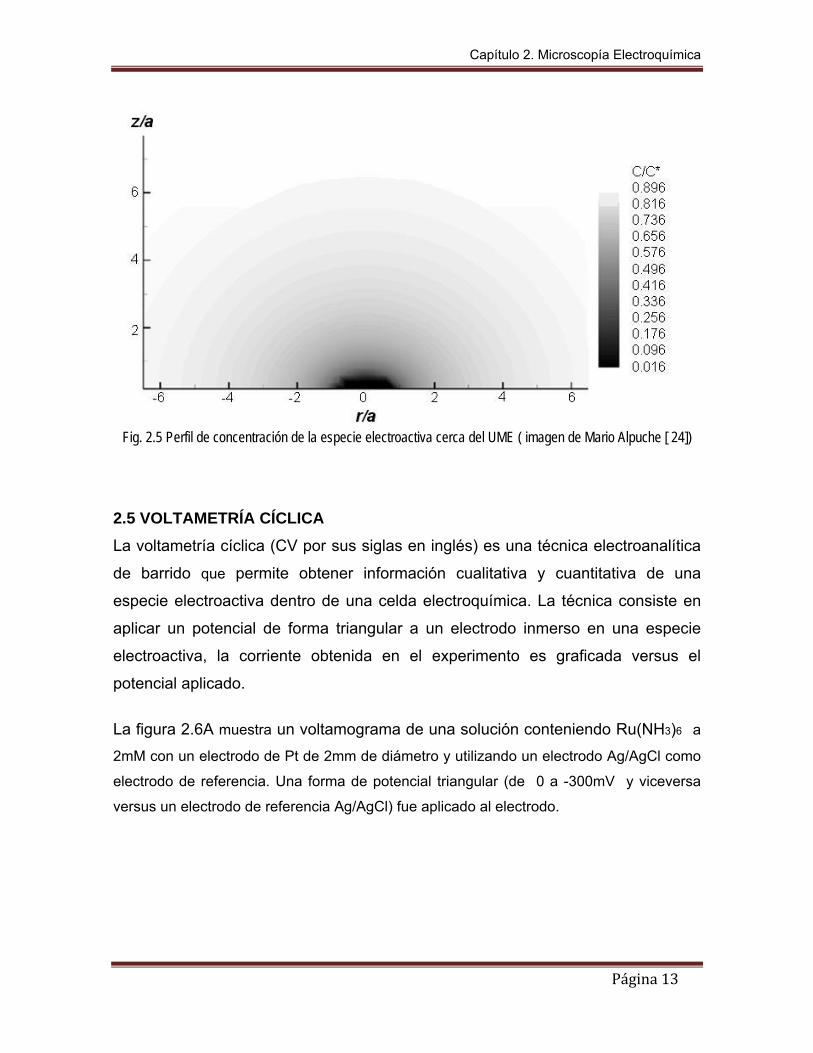
Donde C - concentración de la especie electroactiva en cualquier punto (r,z) r - coordenada radial (coordenadas cilíndricas) z - coordenada z (coordenadas cilíndricas) La figura 2.5 muestra la concentración de la especie electroactiva de acuerdo a la
ecuación (8)
Capítulo 2. Microscopía Electroquímica
Página 13
Fig. 2.5 Perfil de concentración de la especie electroactiva cerca del UME ( imagen de Mario Alpuche [ 24])
2.5 VOLTAMETRÍA CÍCLICA La voltametría cíclica (CV por sus siglas en inglés) es una técnica electroanalítica
de barrido que permite obtener información cualitativa y cuantitativa de una
especie electroactiva dentro de una celda electroquímica. La técnica consiste en
aplicar un potencial de forma triangular a un electrodo inmerso en una especie
electroactiva, la corriente obtenida en el experimento es graficada versus el
potencial aplicado.
La figura 2.6A muestra un voltamograma de una solución conteniendo Ru(NH3)6 a
2mM con un electrodo de Pt de 2mm de diámetro y utilizando un electrodo Ag/AgCl como
electrodo de referencia. Una forma de potencial triangular (de 0 a -300mV y viceversa
versus un electrodo de referencia Ag/AgCl) fue aplicado al electrodo.

Capítulo 2. Microscopía Electroquímica
Página 14
Fig. 2.6 Voltamogramas de un electrodo de(A) Pt de 2mm de diámetro (B) Pt de 10μm de diámetro Al iniciar el barrido de potencial la corriente empieza a subir debido a la capacitancia de la
doble capa existente en la interfase del electrodo y la solución. El proceso faradaico de
reducción que se lleva a cabo es (9) Ru(NH3)6 3+ + e- → Ru(NH3)6
2+ Mientras el potencial sigue incrementándose en el sentido negativo la corriente sigue
creciendo, sin embargo llega un momento en que la difusión de la especie electroactiva al
electrodo llega a un máximo y limita la corriente, ésta empieza entonces a decrecer pues
la concentración de la especie tiende a ser menor en la zona cercana al electrodo.
Cuando el potencial regresa en su recorrido, la corriente decrece y eventualmente cambia
de signo, debido a que el Ru(NH3)62+ producido en la reducción puede ser oxidado en la
segunda parte del recorrido a través de la reacción
(10) Ru(NH3)6
2+ → Ru(NH3)63+ + e-
Al retornar el potencial a su valor inicial (viajando hacia potenciales más positivos) la
corriente es en si el resultado de los procesos de oxidación y reducción, poco a poco la
razón de la reacción de oxidación empieza a subir y la razón de reducción disminuye con
lo que Ru(NH3)62+ puede viajar a la superficie del electrodo fácilmente por lo que se
presenta otro pico de corriente, se repite entonces el fenómeno ocurrido en la primera
mitad del experimento pero ahora con un fenómeno de oxidación.

Capítulo 2. Microscopía Electroquímica
Página 15
Efectuando el mismo experimento pero utilizando un UME de 10 micras de diámetro en la
misma solución, el voltamograma no presenta ningún pico y la corriente prácticamente
tiene el mismo comportamiento en las dos mitades del recorrido –ver figura 2.6B-, esto es
debido a que la corriente no llega al limite de difusión en la reacción y el gradiente de
concentración alrededor del UME tiene la misma escala del tamaño del mismo.
2.6 APLICACIONES Algunas de las aplicaciones del SECM se listan a continuación: A) Morfología de Superficies
Haciendo un rastreo de la punta sobre la superficie y registrando los cambios de corriente
a través de las técnicas de altura constante o distancia constante [1] se puede obtener la
morfología de superficies con ayuda de una curva de acercamiento del SECM y del
material o superficie bajo estudio. También es posible mantener la corriente constante y
registrar los cambios de potencial para realizar esta misma tarea, aunque este tipo de
experimentación no es muy común.
B) Imagen Química
El uso del SECM es útil al estudiar superficies que tienen zonas de diferente
comportamiento, al realizar un rastreo del UME sobre la superficie se detectan superficies
activas y/o pasivas de acuerdo al cambio de la corriente en la punta (de acuerdo a si la
corriente se incrementa o decrementa la corriente respecto a iT,∞). Estos mismos principios
son también aplicados en la investigación de problemas biológicos y bioquímicos [25]
C) Caracterización de la forma del UME
Caracterizar la forma de un electrodo de menos de 1 de micra de radio es difícil a través
de técnicas ópticas o de microscopía electrónica de barrido. Obteniendo una curva de
acercamiento es posible identificar la forma de UME´s que tienen una forma diferente a la
de disco debido a que el comportamiento de la curva de acercamiento es diferente.
D) Microelectrodeposición y microdesgastes
Con el uso de SECM es posible depositar y modificar o desgastar a alta resolución
superficies de diferentes materiales. Una de las formas de realizar este tipo de tareas es

Capítulo 2. Microscopía Electroquímica
Página 16
llamado el modo directo, en este modo el sustrato está polarizado y actúa como el
electrodo auxiliar, debido a que en el UME existe un proceso de reducción, en el sustrato
existe un proceso de oxidación, éste último proceso es el que conduce la formación de
patrones en el sustrato. Como el sustrato entero está polarizado, la resolución del patrón
depende de la distribución del campo eléctrico, por lo que la distancia entre la punta del
UME y el sustrato debe de ser minimizada. Un esquema de la operación del modo directo
del SECM se muestra en la figura 2.7.
Fig. 2.7 Representación del modo directo del SECM
Utilizando el modo directo del SECM Lin [26] realizó desgastes localizados con anchos de
línea de 0.3 – 2 micras sobre el semiconductor n-GaAs (excitado con luz), Craston [27]
depositó plata en un polímero iónico conductor (Nafion), mientras que Hüsser [28,29]
reportó el microdepósito de plata, oro, cobre, paladium y una variedad de polímeros
iónicos conductores además del desgaste en alta resolución de cobre, plata y oro. Otros
autores utilizaron también el modo directo para realizar microdepósitos sobre polímeros
conductores [30,31] y películas orgánicas y biológicas [32,33]. El otro modo utilizado con
el SECM para realizar depósitos y modificaciones en superficies es el modo de
retroalimentación, con este modo se han logrado deposición de metales sobre diversos
tipos de superficies [34,35], microdesgastes sobre diversas superficies metálicas [36],
desgastes de alta resolución sobre semiconductores [37-38], deposición y disolución
sobre materiales inorgánicos [39], deposición de polímeros conductores [40], además de
microfabricación de estructuras orgánicas y biológicas [41,42]

Capítulo 2. Microscopía Electroquímica
Página 17
E) Electroquímica en pequeños volúmenes de solución
Con el SECM es posible realizar electroquímica con muy poco volumen en la solución, se
han reportado experimentos con varios microlitros de solución [43] y en teoría es posible
también realizar experimentación en soluciones de menor volumen, por ejemplo en
líquidos contenidos en poros de superficies.
F) Potenciometría
Puntas o electrodos que producen un cambio de potencial en respuesta a cambios de
concentración de especies pueden ser utilizadas en el SECM. Estos electrodos son
particularmente útiles en el estudio de especies que no muestran electroactividad como
Na+, K+ y Ca2+. También se han utilizado en experimentos con SECM puntas de Sb para
la detección del pH [44].
G) Otras Aplicaciones
El SECM ha demostrado ser muy útil en la medición de la cinética homogénea y
heterogénea, en los sistemas biológicos se ha utilizado para obtener imágenes de
células, estudiar y analizar reacciones en enzimas y la evolución del oxígeno en la
superficie de las hojas, áreas como el estudio de interfases líquido/líquido, membranas,
películas delgadas y la medición de reacciones en diferentes tipos de superficies han sido
hechas a través del SECM.

Capítulo 3. Instrumentación
Página 18
CAPITULO 3
INSTRUMENTACIÓN
En este capítulo se hace una breve introducción acerca de la instrumentación típica de un
microscopio electroquímico, se describe toda la instrumentación utilizada en la
construcción de nuestro SECM, se detallan los equipos, las conexiones y señales de
comunicación y por último se listan las ventajas de nuestra instrumentación versus las
instrumentaciones típicas de los SECM´s existentes.
3.1 INTRODUCCIÓN La mayoría de los SECM existentes son construidos en laboratorios de investigación,
solamente existen dos compañías que los manufacturan y venden comercialmente[13,14],
ciertamente la instrumentación de un SECM tiene menos ingeniería e investigación
realizada comparada con los comercialmente exitosos microscopios de fuerza atómica y
microscopios de efecto túnel, por este mismo hecho existen muchas oportunidades para
los investigadores en mejorar las capacidades del SECM. La instrumentación de un
SECM típico se muestra en la figura 3.1 .
Fig. 3.1Componentes típicos de un SECM

Capítulo 3. Instrumentación
Página 19
El bipotenciostato es utilizado en caso de que se desee polarizar la muestra estudiada, si
no se desea polarizar la muestra se puede usar un potenciostato normal, el posicionador
es de 3 ejes y puede estar compuesto de motores de paso de alta precisión, elementos
piezocerámicos o de servomotores, en algunos SECM´s se tiene adicionalmente una
videomicroscopio que muestra el acercamiento de la punta respecto a la superficie y así
evita daños a cualquiera de los dos. El software de la computadora controla todo el
sistema a través de una tarjeta de adquisición de datos y las tareas o técnicas
electroquímicas que pueda desarrollar depende de la programación hecha en el mismo.
3.2 INSTRUMENTACIÓN IMPLEMENTADA El sistema de microscopía electroquímica desarrollado en nuestro centro de investigación
fue construido utilizando un posicionador XYZ modelo Fibermax de AeroTech Inc.,
servoamplificadores análogos AeroTech modelos BA-20 y BA-30 y un controlador de
movimiento marca Galil DMC 2133 con interfaz para encoders de alta resolución sen/cos
DB28104. La tarjeta de adquisición de datos utilizada para la comunicación con la PC es
una National Instruments PCI 6229 y el potenciostato es modelo LPG03 de Bank
Elektroniks. Un esquema de los elementos que componen todo el SECM implementado
se muestra en la figura 3.2
Fig. 3.2 Componentes del SECM construido

Capítulo 3. Instrumentación
Página 20
3.2.1 Posicionador La función del posicionador es mover con precisión el UME, de unas cuantas micras de
diámetro en su punta, dentro de una celda electroquímica y sobre una superficie a
estudiar. Una imagen del posicionador con su adaptación para mover los electrodos
dentro de una celda electroquímica se muestra en la figura 3.3.
Fig. 3.3 Posicionador del SECM
El posicionador está construido con servomotores lineales sin escobillas (brushless) [45]
con resoluciones de movimiento en su especificación en el rango de 2-10 nm, la
tecnología utilizada por el posicionador es de no contacto llamada direct-drive (patente
pendiente de la compañía AeroTech). El recorrido del posicionador es de 25 mm, 25 mm y
4 mm en los ejes X, Y y Z respectivamente y la especificación de sus velocidades
máximas es de 250 mm/s para los ejes X y Y mientras que para el eje Z es de 50 mm/s.
El posicionador Fibermax de AeroTech fue elegido debido a la exactitud en sus
movimientos, su estabilidad, su muy alta resolución y tener la opción de adaptar ejes
adicionales a los ejes ortogonales, otra de las ventajas del posicionador es la operación
libre de mantenimiento en la vida del producto.

Capítulo 3. Instrumentación
Página 21
La resolución nanométrica del posicionador es obtenida debido a los encoders Renishaw
integrados internamente en el mismo, los cuales envían señales análogas seno y
cosenoidales de 1 Vpp [46] al controlador de movimiento. Los encoders son ópticos y
detectan con muy alta sensibilidad el reflejo de una cinta de oro graduada senoidalmente
en su superficie. La figura 3.4 muestra la operación básica de un encoder de este tipo.
Fig. 3.4 Operación de los encoders Renishaw
Una de las partes (la cinta graduada o el encoder) se monta en la parte móvil del motor y
la otra parte en el chasis del motor lineal. Al moverse el motor lineal el reflejo en la
dirección de la señal enviada varía de acuerdo a la zona donde “choca” la luz emitida por
el led en la cinta graduada de oro, esto proporciona una posición muy precisa de la
posición del motor.
Fig. 3.5 A) Montaje de encoder B) Fotografía de encoder Renishaw y su cinta

Capítulo 3. Instrumentación
Página 22
Los motores del posicionador fueron entonados a través del software WSDK de la
compañía Galil. Para su interconexión con el resto de los equipos cada motor del
posicionador cuenta con un cable blindado y un conector DB-25 en su extremo. Las
señales que salen de cada uno de los ejes del posicionador son mostradas en la figura
3.6. Con el posicionador controlado por la Tarjeta DMC-2133 se lograron resoluciones del
orden de algunos nanómetros en el eje Z y varias decenas de nanómetros en los ejes X y
Y.
Fig. 3.6 Señales de cada eje del posicionador Fibermax de Aerotech Inc.
3.2.2 Servoamplificadores Los servoamplificadores proporcionan la corriente necesaria a los motores del
posicionador para moverlo, se utilizaron los modelos BA20 y BA30 debido a su
compatibilidad con el posicionador utilizado. Una imagen de este tipo de
servoamplificadores indicando los puertos con los que cuenta se muestra en la figura 3.7.

Capítulo 3. Instrumentación
Página 23
Fig. 3.7 ServoAmplificador de la serie BA de Aerotech Inc.
El diagrama funcional del amplificador se muestra en la figura 3.8. Básicamente el
servoamplificador de la serie BA consta de una etapa de control que recibe señales
digitales y la señal de comando (+/- 10V) proveniente del controlador de movimiento, en
esa misma etapa maneja la lógica de conmutación de los motores de acuerdo a la
señales Hall recibidas, también contiene una etapa de potencia la cual está aislada
ópticamente de la parte de control y proporciona la corriente a los motores a través de
sus fases además de la protección requerida a sobrecorrientes o cortocircuitos.

Capítulo 3. Instrumentación
Página 24
Fig. 3.8 Diagrama funcional del servoAmplificador de la serie BA de Aerotech Inc.
Para mover cada uno de los motores lineales se crea una corriente alterna conmutada
que pasa en cualquier momento por únicamente dos de las fases del motor, La
conmutación es comandada por las señales de los sensores Hall que provienen del motor.
El circuito de conmutación dentro del amplificador es similar en su operación al mostrado
en la figura 3.9.

Capítulo 3. Instrumentación
Página 25
Fig. 3.9 Sistema de conmutación de corriente en un motor sin escobillas
En un momento determinado el controlador de disparo enciende únicamente uno de los
MOSFET de la parte superior y uno de la parte inferior del circuito de acuerdo a la señal
HALL recibida. Las señales de control de disparo están en formato de modulación de
ancho de pulso [47] (PWM por sus siglas en inglés) con el fin de minimizar pérdidas de
energía y hacer más eficiente y práctico el control de la corriente en los devanados del
motor.
Las señales Hall pueden verse en conjunto como un sensor magnético que indica
exactamente la polaridad del campo magnético producido en el motor, esto proporciona la
información necesaria para conocer el orden de la siguiente conmutación que debe de
hacerse con el fin de seguir desplazando al motor. Para un motor de 3 devanados sólo
pueden existir 6 conmutaciones o sentidos de la corriente, éstos son mostrados en la
figura 3.10.
Capítulo 3. Instrumentación
Página 26
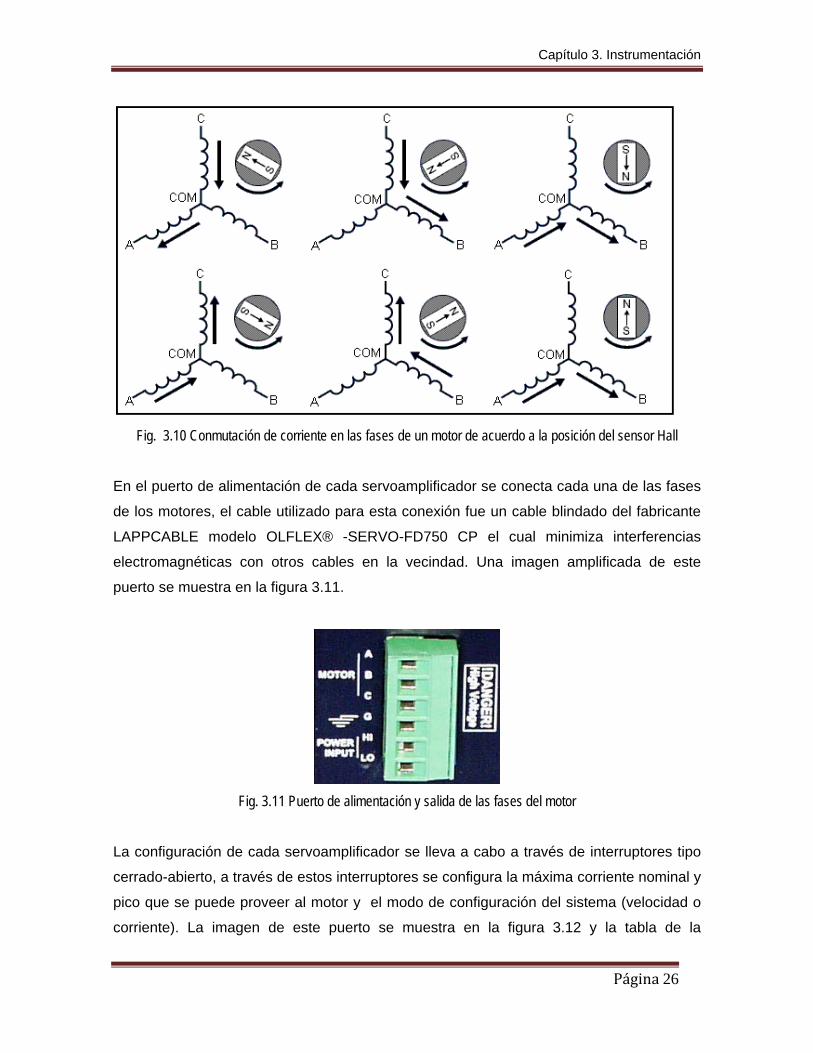
Fig. 3.10 Conmutación de corriente en las fases de un motor de acuerdo a la posición del sensor Hall
En el puerto de alimentación de cada servoamplificador se conecta cada una de las fases
de los motores, el cable utilizado para esta conexión fue un cable blindado del fabricante
LAPPCABLE modelo OLFLEX® -SERVO-FD750 CP el cual minimiza interferencias
electromagnéticas con otros cables en la vecindad. Una imagen amplificada de este
puerto se muestra en la figura 3.11.
Fig. 3.11 Puerto de alimentación y salida de las fases del motor
La configuración de cada servoamplificador se lleva a cabo a través de interruptores tipo
cerrado-abierto, a través de estos interruptores se configura la máxima corriente nominal y
pico que se puede proveer al motor y el modo de configuración del sistema (velocidad o
corriente). La imagen de este puerto se muestra en la figura 3.12 y la tabla de la
Capítulo 3. Instrumentación
Página 27
configuración de los interruptores para los tres servoamplificadores en nuestro sistema se
muestra en la tabla 3.1.
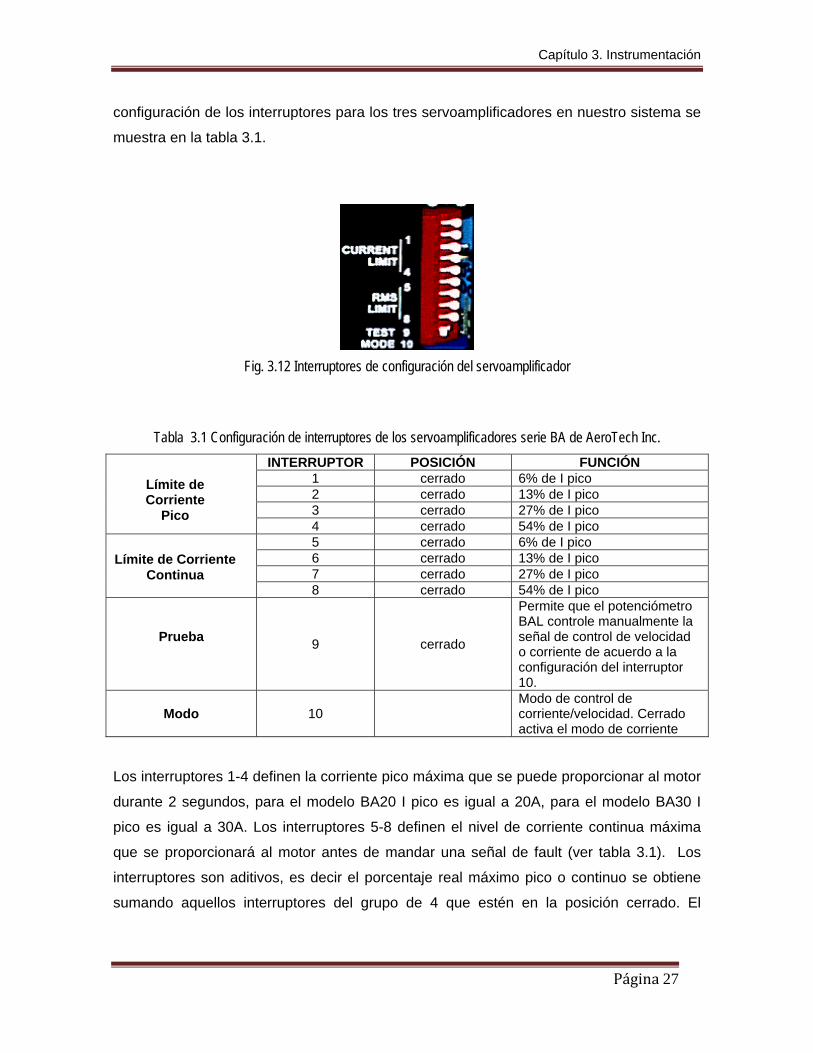
Fig. 3.12 Interruptores de configuración del servoamplificador
Tabla 3.1 Configuración de interruptores de los servoamplificadores serie BA de AeroTech Inc. INTERRUPTOR POSICIÓN FUNCIÓN
1 cerrado 6% de I pico 2 cerrado 13% de I pico 3 cerrado 27% de I pico 4 cerrado 54% de I pico
5 cerrado 6% de I pico 6 cerrado 13% de I pico 7 cerrado 27% de I pico 8 cerrado 54% de I pico
Prueba 9 cerrado
Permite que el potenciómetro BAL controle manualmente la señal de control de velocidad o corriente de acuerdo a la configuración del interruptor 10.
Modo 10
Modo de control de corriente/velocidad. Cerrado activa el modo de corriente
Los interruptores 1-4 definen la corriente pico máxima que se puede proporcionar al motor
durante 2 segundos, para el modelo BA20 I pico es igual a 20A, para el modelo BA30 I
pico es igual a 30A. Los interruptores 5-8 definen el nivel de corriente continua máxima
que se proporcionará al motor antes de mandar una señal de fault (ver tabla 3.1). Los
interruptores son aditivos, es decir el porcentaje real máximo pico o continuo se obtiene
sumando aquellos interruptores del grupo de 4 que estén en la posición cerrado. El
Límite de Corriente
Pico
Límite de Corriente Continua

Capítulo 3. Instrumentación
Página 28
interruptor 10 define la configuración del modo de control (corriente o velocidad) utilizado
en el servoamplificador.
La configuración de nuestro sistema para cada uno de los servoamplificadores en el
SECM se muestra en la tabla 3.2.
Tabla 3.2 Configuración de interruptores de todos los servoamplificadores en el SECM construido
1 2 3 4 5 6 7 8 9 10
cerrado cerrado abierto abierto cerrado cerrado abierto abierto abierto cerrado
Como lo muestra el interruptor 10 los servoamplificadores fueron configurados en modo
de comando de corriente o torque (la corriente aplicada al motor es proporcional al voltaje
de control de +/-10V aplicado al servoamplificador), un esquema de esta configuración se
muestra en la figura 3.13.
Fig. 3.13 Configuración de modo de control de corriente utilizado en un servoamplificador
Capítulo 3. Instrumentación
Página 29
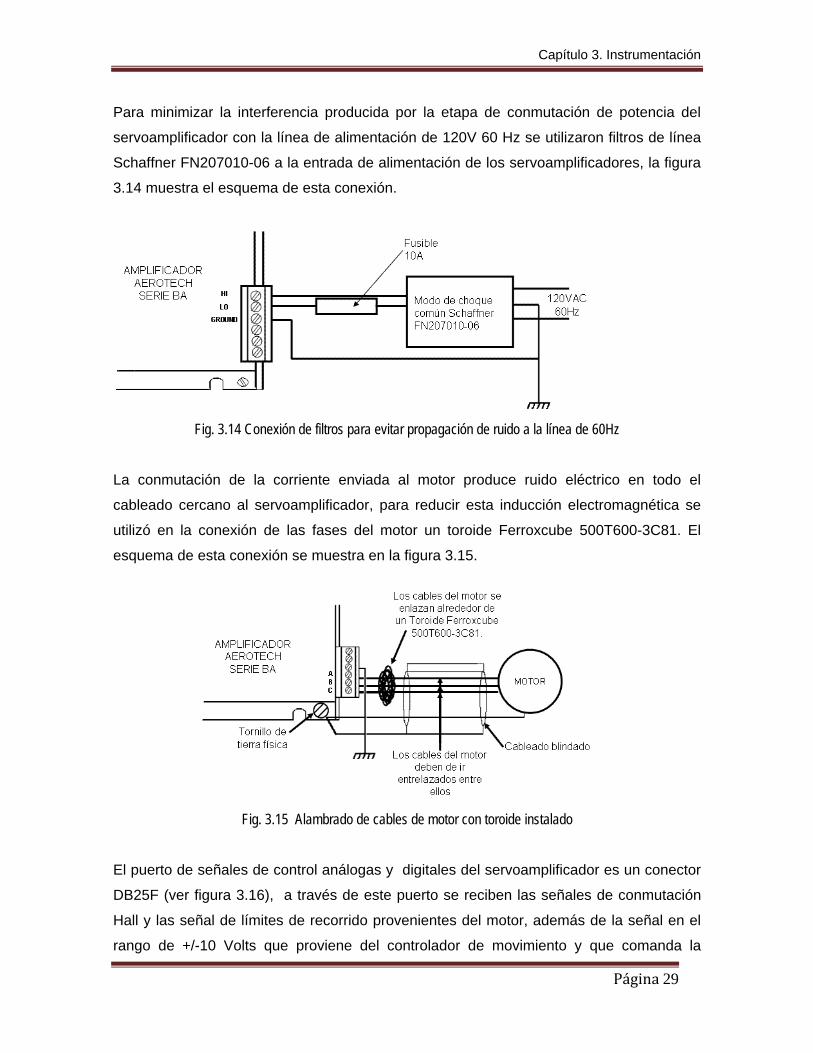
Para minimizar la interferencia producida por la etapa de conmutación de potencia del
servoamplificador con la línea de alimentación de 120V 60 Hz se utilizaron filtros de línea
Schaffner FN207010-06 a la entrada de alimentación de los servoamplificadores, la figura
3.14 muestra el esquema de esta conexión.
Fig. 3.14 Conexión de filtros para evitar propagación de ruido a la línea de 60Hz
La conmutación de la corriente enviada al motor produce ruido eléctrico en todo el
cableado cercano al servoamplificador, para reducir esta inducción electromagnética se
utilizó en la conexión de las fases del motor un toroide Ferroxcube 500T600-3C81. El
esquema de esta conexión se muestra en la figura 3.15.
Fig. 3.15 Alambrado de cables de motor con toroide instalado
El puerto de señales de control análogas y digitales del servoamplificador es un conector
DB25F (ver figura 3.16), a través de este puerto se reciben las señales de conmutación
Hall y las señal de límites de recorrido provenientes del motor, además de la señal en el
rango de +/-10 Volts que proviene del controlador de movimiento y que comanda la
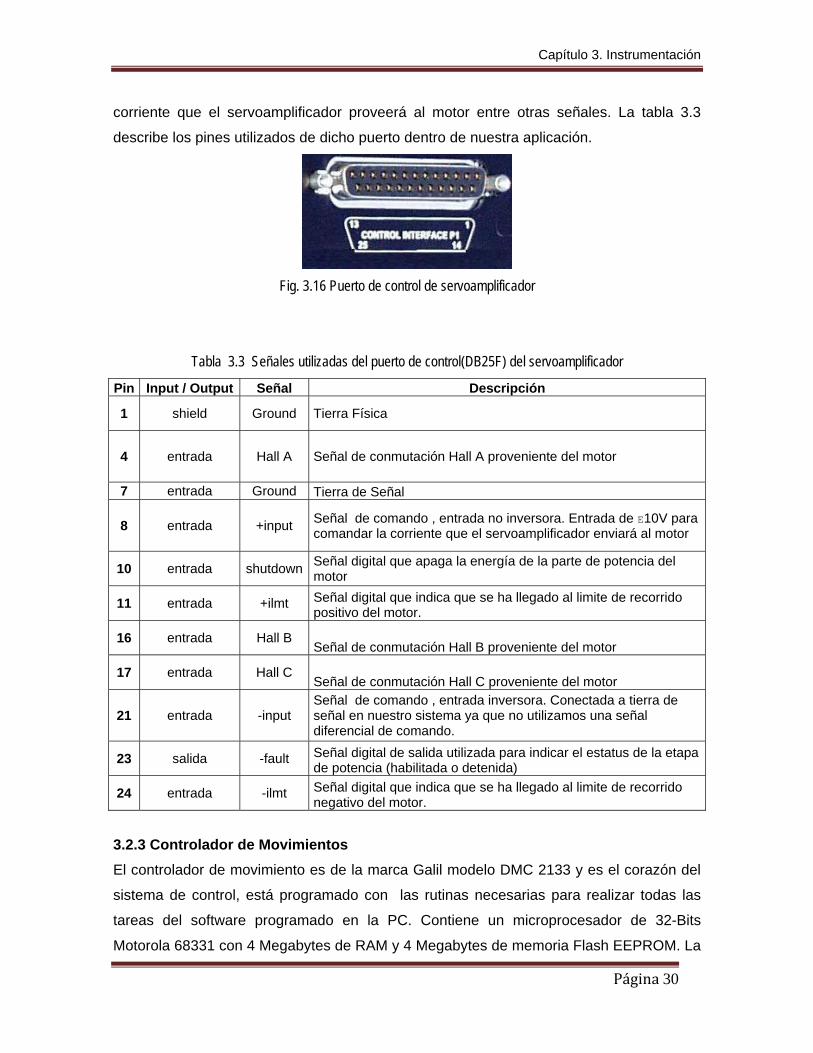
Capítulo 3. Instrumentación
Página 30
corriente que el servoamplificador proveerá al motor entre otras señales. La tabla 3.3
describe los pines utilizados de dicho puerto dentro de nuestra aplicación.
Fig. 3.16 Puerto de control de servoamplificador
Tabla 3.3 Señales utilizadas del puerto de control(DB25F) del servoamplificador
Pin Input / Output Señal Descripción
1 shield Ground Tierra Física
4 entrada Hall A Señal de conmutación Hall A proveniente del motor
7 entrada Ground Tierra de Señal
8 entrada +input Señal de comando , entrada no inversora. Entrada de E10V para comandar la corriente que el servoamplificador enviará al motor
10 entrada shutdown Señal digital que apaga la energía de la parte de potencia del motor
11 entrada +ilmt Señal digital que indica que se ha llegado al limite de recorrido positivo del motor.
16 entrada Hall B Señal de conmutación Hall B proveniente del motor
17 entrada Hall C Señal de conmutación Hall C proveniente del motor
21 entrada -input Señal de comando , entrada inversora. Conectada a tierra de señal en nuestro sistema ya que no utilizamos una señal diferencial de comando.
23 salida -fault Señal digital de salida utilizada para indicar el estatus de la etapa de potencia (habilitada o detenida)
24 entrada -ilmt Señal digital que indica que se ha llegado al limite de recorrido negativo del motor.
3.2.3 Controlador de Movimientos El controlador de movimiento es de la marca Galil modelo DMC 2133 y es el corazón del
sistema de control, está programado con las rutinas necesarias para realizar todas las
tareas del software programado en la PC. Contiene un microprocesador de 32-Bits
Motorola 68331 con 4 Megabytes de RAM y 4 Megabytes de memoria Flash EEPROM. La
Capítulo 3. Instrumentación
Página 31
RAM es la memoria donde se almacenan las variables, arreglos y programas de
aplicación, si se desea almacenar esta información en memoria no volátil se puede
almacenar en la memoria EEPROM.
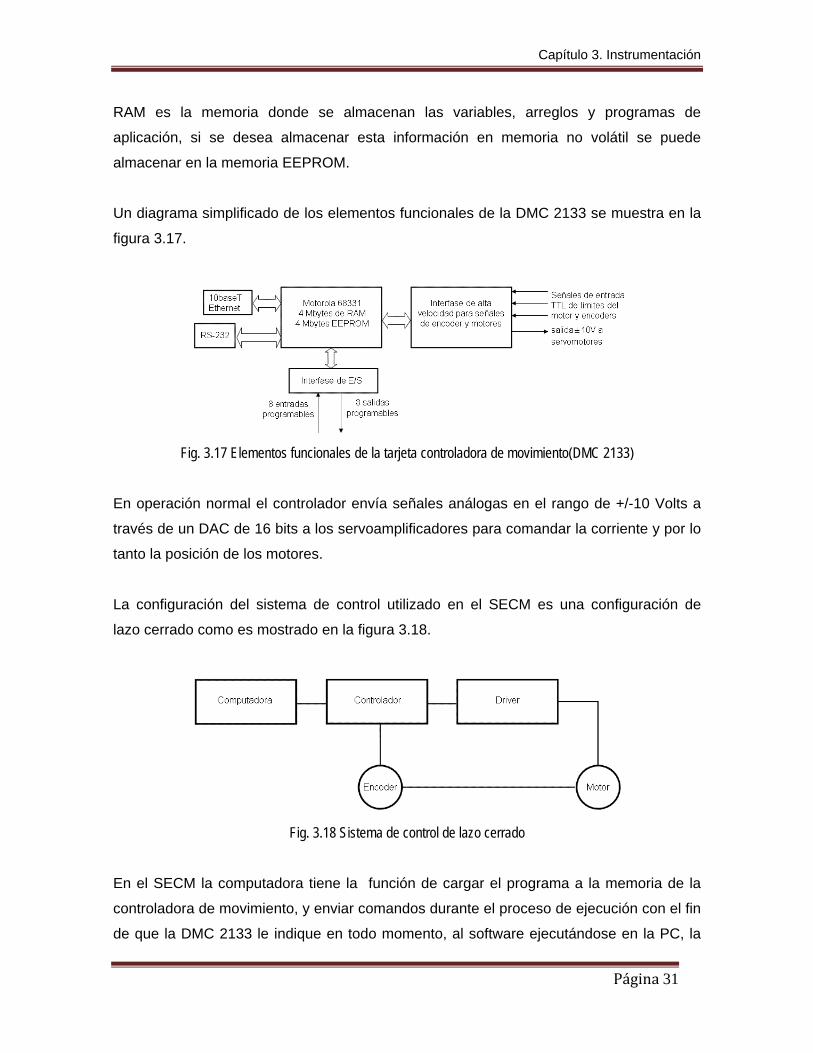
Un diagrama simplificado de los elementos funcionales de la DMC 2133 se muestra en la
figura 3.17.
Fig. 3.17 Elementos funcionales de la tarjeta controladora de movimiento(DMC 2133)
En operación normal el controlador envía señales análogas en el rango de +/-10 Volts a
través de un DAC de 16 bits a los servoamplificadores para comandar la corriente y por lo
tanto la posición de los motores.
La configuración del sistema de control utilizado en el SECM es una configuración de
lazo cerrado como es mostrado en la figura 3.18.
Fig. 3.18 Sistema de control de lazo cerrado
En el SECM la computadora tiene la función de cargar el programa a la memoria de la
controladora de movimiento, y enviar comandos durante el proceso de ejecución con el fin
de que la DMC 2133 le indique en todo momento, al software ejecutándose en la PC, la

Capítulo 3. Instrumentación
Página 32
posición exacta de cada motor. A través de la NI-6229 la computadora envía también
señales de interrupción y de sincronización para realizar una tarea en el DMC 2133
cuando el usuario interactúa con la interfaz del software en la PC.
Para poder leer las señales provenientes de los 3 encoders, el controlador de movimiento
tiene instalado la tarjeta DB-28104, una fotografía de dicha tarjeta se muestra en la figura
3.19.
Fig. 3.19 tarjeta DB-28104 con 4 puertos DB9F para señales de encoder sen/cos
Las señales que llegan y salen de los puertos DB9F de la tarjeta DB-28104 se muestra
en la tabla 3.4.
Tabla 3.4 Señales de un puerto DB9F de la tarjeta DB-28104, N=X,Y,Z
Eje N conector DB9F
Pin Descripción
1 Salida de 5V
2 Index -
3 Sen -
4 Cos -
5 No conexión
6 Tierra lógica
7 Index +
8 Sen +
9 Cos +

Capítulo 3. Instrumentación
Página 33
La fotografía de la tarjeta DB-28104 instalada en la DMC 2133 se encuentra en la figura
3.20.
Fig. 3.20 tarjeta DB-28104 instalada en la controladora de movimientos
El controlador cuenta con 3 filtros Proporcional Integral y Derivativo (PID), uno para cada
eje, el nivel de la corrección del error generada por el controlador depende básicamente
de los valores de los parámetros PID de cada filtro así como de otros parámetros que
influyen en el control del movimiento de los motores.
La programación en el controlador de movimiento puede pensarse como si fuera una
jerarquía de 3 niveles, en el nivel superior tenemos la programación que hace el usuario,
ésta define los parámetros del filtro PID, la velocidad, la aceleración y desaceleración del
motor al realizar un movimiento además de definir los desplazamientos que debe de hacer
el motor. En el siguiente nivel de jerarquía se encuentra la programación interna que
genera el perfil de movimiento y finalmente tenemos la programación del ciclo cerrado de
control que se asegura de que el motor siga el perfil definido. Un esquema de la jerarquía
de programación mencionada se presenta en la figura 3.21.

Capítulo 3. Instrumentación
Página 34
Fig. 3. 21 Jerarquía de Niveles de programación en el DMC 2133
Cuando se comanda a realizar un movimiento a la DMC 2133, ésta calcula un perfil de
velocidad típicamente trapezoidal de acuerdo a los parámetros programados de
velocidad, aceleración y desaceleración del motor, este perfil genera a su vez un perfil de
desplazamiento que indica la posición exacta que debe tener el motor en un tiempo dado.
Un ejemplo de este tipo de programación se da en el siguiente código: SP 20000,20000 ;Se define la velocidad de los motores X y Y en ctas/seg AC 200000,200000;Se define la aceleración de los motores X y Y en ctas/seg2 DC 200000,200000;Se define la aceleración de los motores X y Y en ctas/seg2 PR 6000,4000; Se define el desplazamiento de los motores X y Y en cuentas BG X; Se inicia el movimiento del motor X AD 1200; Espera a que el movimiento de X llegue a un desplazamiento de ; 1200 ctas BG Y; Se inicia el movimiento del motor Y EN; se termina el programa
El perfil de velocidad y su perfil de posición para los motores X y Y del código escrito
previamente es mostrado en la figura 3.22.
Nótese que los perfiles de velocidad de ambos motores son trapezoidales, al inicio de
ambos la velocidad se incrementa de acuerdo a la aceleración programada hasta llegar a
la velocidad de 20000 cuentas del encoder por segundo, antes de terminar el movimiento
el motor se desacelera hasta llegar a la velocidad de 0 ctas/seg. La posición en este punto
es exactamente el desplazamiento programado para el motor. Obsérvese también que el
movimiento del motor Y empieza una vez que el motor X ha llegado a un desplazamiento
de 1200 cuentas y que la sección lineal en los perfiles de desplazamiento corresponde a
la zona donde el motor tiene una velocidad constante.

Capítulo 3. Instrumentación
Página 35
Fig. 3.22 Perfil de velocidad y posición de los ejes X y Y para el código escrito
Una vez generado el perfil de movimiento de cada motor, el controlador comanda a cada
servoamplificador para darle la corriente requerida al motor, con el fin de que la posición
del mismo se encuentre en la posición programada. La posición del motor se sensa
continuamente a través del encoder, y se compara con la posición en el perfil de posición,
si existe un error, el filtro del controlador envía una corrección a la señal que comanda al
servoamplificador con el fin de que el perfil comandado sea el perfil seguido.
El filtro del controlador en cada eje no es un simple PID, cuenta internamente con
parámetros adicionales que permiten mejorar notablemente el control del sistema de
posicionamiento, elementos como un filtro de paso bajo, una señal de corrimiento u
“offset” en la señal de corrección, un control adicional sobre la constante de integración
del filtro, un filtro que permite evitar posibles resonancias físicas del sistema y ajustes a la
señal de corrección proporcionales a la velocidad y/o aceleración del motor, hacen del

Capítulo 3. Instrumentación
Página 36
controlador un sistema altamente robusto, flexible y eficiente en su operación. El filtro
completo de un eje del controlador en el espacio s y los comandos que afectan su
comportamiento se muestra en la figura 3.23.
Fig. 3.23 Filtro completo en el dominio s de un eje de la DMC 2133
En la gráfica R es la señal de error que llega al filtro del controlador, la línea punteada
representa al filtro típico Proporcional Integral Derivativo, Las letras P, I y D representan
las constantes del filtro, a través del comando IL (Integrator Limit) se limita la contribución
de la función integradora a cierto límite, los coeficientes FA (Aceleration Feedforward) y
FV (Velocity Feedforward) agregan y/o reducen una señal proporcional en la
aceleración/desaceleración y velocidad en un movimiento a través comandos que llevan
el mismo nombre. El filtro de paso bajo elimina de la salida del PID las frecuencias
mayores a las establecidas a través del comando PL (PoLe). El filtro NOTCH tiene como
función cancelar resonancias en algunos tipos de sistemas a través de los comandos NB
(Notch Bandwidth), NF (Notch Frequency) y NZ (Notch Zero), el comando OF (Offset)
proporciona un corrimiento u offset a la señal del filtro, esto ayuda en sistemas que son
afectados por la fuerza de gravedad, el comando TL (Torque Limit) limita la salida del filtro
a cierto nivel de voltaje. La salida de todo el filtro es aplicada al servoamplificador a través
de una señal análoga en el rango de +/-10V o menor de acuerdo a los parámetros
establecidos.

Capítulo 3. Instrumentación
Página 37
3.2.4 Potenciostato/Galvanostato El Potenciostato/Galvanostato mide con mucha precisión las corrientes y potenciales de la
celda electroquímica, en el SECM construido se utiliza el modelo LPG03 de la compañía
Bank Elektroniks. Este equipo contiene internamente una tarjeta integrada con interfaz
SCSI III en la parte posterior que permite el control remoto del mismo a través de puertos
digitales y análogos de una tarjeta de adquisición de datos. La figura 3.24 muestra una
fotografía del potenciostato empleado en el SECM.
Fig. 3.24 Potenciostato LPG03 de bank Elektroniks
Las señales disponibles en el conector SCSI III del equipo se muestran en la tabla 3.5.
Tabla 3.5 Señales del Puerto SCSI III del Potenciostato
Señal Pin
Potential Out 68
Current Out 34
Potential In 58
Range In 0 50
Range In 1 16
Range In 2 49
CE ON/OFF 15
Pot/Gal 48
Range Out 0 46
Range Out 1 12
Range Out 2 45

Capítulo 3. Instrumentación
Página 38
Las señales Potential Out y Current Out son señales análogas que indican el nivel de
potencial y corriente en la celda, en el caso de la corriente la señal es de +/- 2 V para el
máximo valor en la escala utilizada, esto es, si se opera en la escala de 1 mA entonces
una señal de 2V indicará una corriente de 1 ma en la celda y una señal de
-2V indicara una corriente de -1 mA. En el caso del potencial, el valor de voltaje análogo
puede estar en el rango de +/- 30 V y representa el potencial medido entre el electrodo de
trabajo y el de referencia. El Potencial In es una señal de control que puede estar también
en el rango de +/-30 V para operar remotamente el equipo en el modo potenciostato o de
+/- 1 V para operarlo en el modo galvanostato. En modo potenciostato define el potencial
que debe de existir entre el electrodo de trabajo y el de referencia y en modo galvanostato
define la corriente que deberá circular en la celda de acuerdo a la escala utilizada.
El resto de las señales son señales digitales TTL (0 y 5 V) y definen el rango de corriente
programado del equipo (Range In 0-2 ), activar o desactivar el electrodo auxiliar(CE
ON/OFF), el modo de operación (Pot/Gal) y el rango de corriente actualmente
utilizado(Range Out 0-2). El software ejecutándose en la PC controla completamente el
POT/GAL a través de una tarjeta de adquisición de datos.
3.2.5 Tarjeta de Adquisición de Datos La comunicación con el POT/GAL y las señales eléctricas de sincronización con el
controlador de movimiento se realizaron a través de una tarjeta de adquisición de datos
NI-DAQ PCI 6229 de 16 bits de resolución. Una fotografía de la tarjeta utilizada se
muestra en la figura 3.25.
Fig. 3.25 Tarjeta PCI 6229 de National Instruments

Capítulo 3. Instrumentación
Página 39
La tarjeta tiene una velocidad de lectura de 250 kS/s entre sus 32 puertos análogos de
entrada y una velocidad de escritura de 833 kS/s entre sus 4 puertos análogos de salida,
tiene 24 puertos digitales de E/S en donde algunos de ellos pueden ser utilizados como
contadores/temporizadores. La NI-DAQ PCI 6229 cuenta también con un buffer de salida
de 8191 muestras para almacenar señales arbitrarias con el fin de poder generar
cualquier función y ser enviada a través de uno de los puertos análogos. Los puertos
usados por la tarjeta y su función se encuentran en la tabla 3.6.
Tabla 3.6 Señales utilizadas para la comunicación en la NI DAQ PCI 6229
Puerto Descripción
AI0 Lectura del Potencial proveniente del Potenciostato/Galvanostato
AI2 Lectura de la Corriente proveniente del Potenciostato/Galvanostato
AO0 Potencial de control al Potenciostato/Galvanostato
P0.0 Activación/Desactivación del Electrodo Auxiliar(CE)
P0.1 Control de Rango al Potenciostato
P0.2 Control de Rango al Potenciostato
P0.3 Control de Rango al Potenciostato
P0.4 Lectura del Rango del Potenciostato
P0.5 Lectura del Rango del Potenciostato
P0.6 Lectura del Rango del Potenciostato
P0.7 Modo de Operación Potenciostato/Galvanostato
P1.4 Interrupción al Controlador de movimiento
P1.5 Puerto auxiliar para detener rutinas cíclicas en el controlador de
movimiento
3.2.6 Cajas de distribución de señales Para enviar las señales de la NI DAQ a los diferentes dispositivos del sistema se utilizó un
panel de interconexión CB68LP de National Instruments empotrado dentro de una caja
metálica, a esta caja se le adaptaron conectores del tipo DB25M, DB15M, DB15F y
receptores de cable coaxial RG68 para distribuir las señales . Imágenes del panel
CB68LP y la caja de distribución se muestran el la figura 3.26.

Capítulo 3. Instrumentación
Página 40
Fig. 3.26 Caja de distribución de señales de la NI DAQ PCI 6229
Otra caja de distribución fue construida para interconectar todos los equipos del sistema.
El esquema general de conexión interno y los diferentes puertos de esta caja se muestra
en la figura 3.27.
Fig. 3.27 Caja de Interconexión de todos los equipos del sistema
Capítulo 3. Instrumentación
Página 41
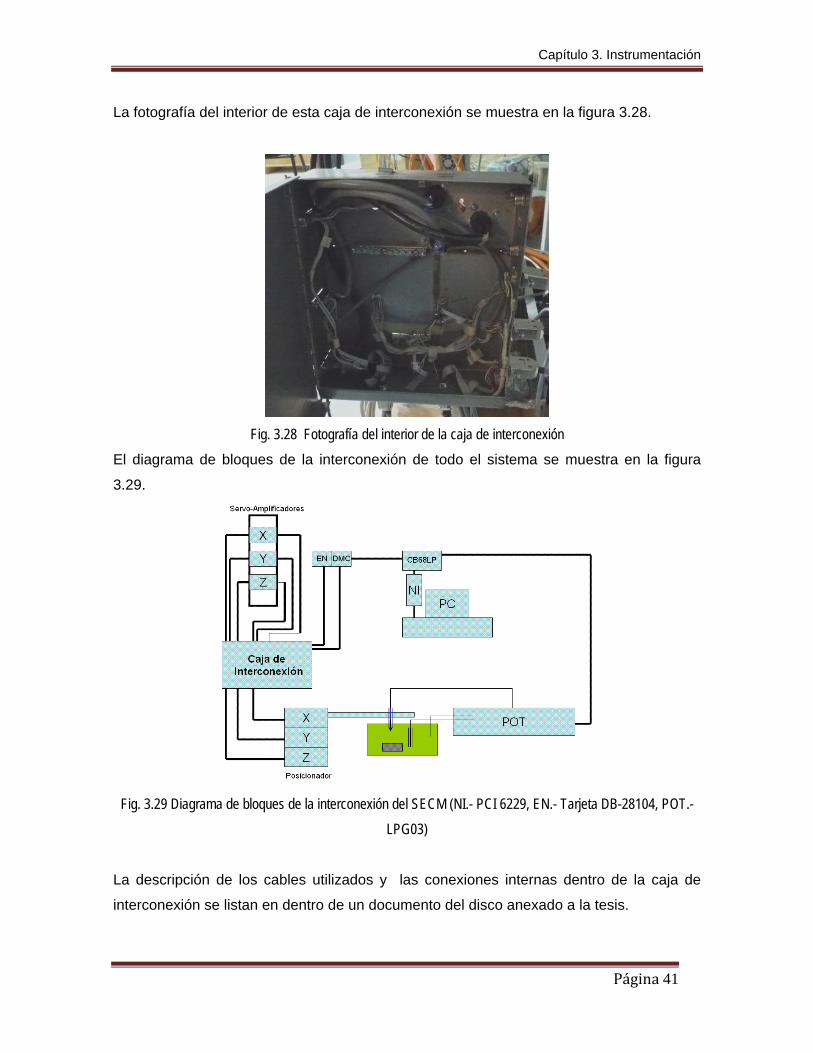
La fotografía del interior de esta caja de interconexión se muestra en la figura 3.28.
Fig. 3.28 Fotografía del interior de la caja de interconexión
El diagrama de bloques de la interconexión de todo el sistema se muestra en la figura
3.29.
Fig. 3.29 Diagrama de bloques de la interconexión del SECM (NI.- PCI 6229, EN.- Tarjeta DB-28104, POT.-
LPG03)
La descripción de los cables utilizados y las conexiones internas dentro de la caja de
interconexión se listan en dentro de un documento del disco anexado a la tesis.

Capítulo 3. Instrumentación
Página 42
3.3 VENTAJAS DE LA INSTRUMENTACION Los microscopios electroquímicos comerciales y los hechos en laboratorios de
investigación, utilizan para el posicionamiento motores de paso y/o elementos
piezocerámicos, debido a su simplicidad en el control y la instrumentación utilizada. Sin
embargo el uso de servomotores manejados por una tarjeta controladora de movimientos
en la tarea de posicionamiento, provee entre varias cosas, la capacidad de movimientos a
mayor velocidad para localizar el microelectrodo en un punto particular (los motores de
paso están limitados por la frecuencia a la que pueden responder y sus desplazamientos
son discretos), también tienen un alcance en mucho mayor rango comparados con los
elementos piezocerámicos (los cuales no tienen un comportamiento lineal).
La programación de movimientos al usar una tarjeta controladora permite simplificar
tareas complicadas de realizar con software utilizando lenguajes tradicionales de
programación. Una de estas tareas que se vuelve muy sencilla de programar es el
movimiento interpolado lineal en varios ejes simultáneamente, el cual permite en un
experimento de rastreo (scanning) con el modo de altura constante, mantener el
microelectrodo a una distancia fija versus el sustrato sobre el cual está montado la
superficie a analizar, no importando si el sustrato tiene una inclinación o declive respecto
al microelectrodo. La figura 3.30 muestra este caso, antes del rastreo el software
determina la inclinación y envía al controlador de movimientos la pendiente de la
superficie, el controlador entonces realiza una interpolación lineal en el eje Z cuando se
realiza un recorrido de la punta bajo el modo mencionado
Fig. 3.30 Técnica de altura constante sobre un sustrato inclinado

Capítulo 3. Instrumentación
Página 43
Programar movimientos complejos del UME, para realizar tareas de electrodeposición o
microdesgaste de patrones complicados en el SECM, pueden ser fácilmente hechas a
través de un controlador de movimiento, ya que posee la capacidad de realizar
interpolaciones lineales y circulares que son fácilmente programadas, se libera tanto a la
PC como al programador de estas arduas tareas y se obtiene una máxima resolución y
linealidad en los movimientos hechos por el microelectrodo.
Otra de las ventajas potenciales del uso de un controlador de movimientos es en la
obtención de morfologías con alta resolución, un técnica utilizada con este fin es llamada
de distancia constante [35], el objetivo es mantener constante la distancia entre el UME y
la superficie, la programación de esta tarea requiere de algoritmos sofisticados y algunas
veces cambios en la configuración del sistema, nuestra tarjeta controladora tiene un modo
llamado de rastreo permanente (position tracking mode) el cual, puede soportar durante
un proceso de scanning comandos que definan nuevas posiciones de la altura del UME
de acuerdo a las variaciones de la corriente en la celda, esto con el fin de mantener una
corriente y por lo tanto una altura constante.
Fig. 3.31 Técnica de distancia constante en un recorrido del UME

Capítulo 4. Software
Página 44
CAPITULO 4
SOFTWARE
En este capítulo se discute la filosofía del software desarrollado y se describen las
interfaces del software en la PC para el control del sistema de microscopía
electroquímica implementado. Se explica la función y operación de cada una de las
interfaces que se presentan al usuario y se explica de manera general las rutinas que son
ejecutadas en la tarjeta controladora de movimiento (DMC 2133) cuando se interactúa con
la interfaz del usuario
La descripción de todo el software utilizado para el desarrollo de microscopio
electroquímico (Windows Servo Design Kit, DMC Smart Terminal, LabView, el lenguaje
de programación propietario de Galil, el software para mediciones electroquímicas
CPCKPC) es explicado en el anexo A. En el anexo B son expuestos los algoritmos del
software desarrollado para el control del microscopio electroquímico llamado
FERROMICROELECHEM y el programa que se ejecuta en sincronización con éste en la
tarjeta DMC 2133.
4.1 FILOSOFÍA DEL SOFTWARE DESARROLLADO El Software desarrollado para el control del SECM está dividido en dos partes, por el lado
de la PC el software fue desarrollado en LabView [48]. Debido a que este es un software
líder en el control de tarjetas de adquisición de datos, y manejo de equipo periférico a
través de puertos de la computadora personal, además de lo anterior proporciona librerías
visuales muy atractivas para el desarrollo de interfaces de instrumentos virtuales. Por otro
lado, el software desarrollado para ejecutarse en la tarjeta controladora de movimiento fue
hecho en un lenguaje propietario de la compañía Galil [49], este lenguaje de
programación consta básicamente de comandos de 2 letras seguidas por argumentos que
indican al controlador de movimiento los parámetros requeridos para realizar la ejecución
del programa.
La comunicación y sincronización, de la información compartida por los programas
ejecutándose en la PC y en la controladora de movimiento, se hizo a través del puerto

Capítulo 4. Software
Página 45
serial RS232. La sincronización de las tareas de software corriendo en ambos sistemas
se hizo a través de señales digitales de los puertos de la NI 6229. La figura 4.1 muestra
este concepto de manera gráfica
Fig. 4.1 Comunicación entre LabView y la DMC 2133
La programación por el lado de la PC fue mayormente basada en la filosofía orientada a
eventos, cada evento que ocurre en la interfaz del software ejecuta una rutina especifica.
La programación en la controladora de movimiento fue basada en la filosofía orientada a
interrupciones, cada interrupción vía hardware que recibe la tarjeta hace que se realice
una tarea.
En la mayoría de los casos, un evento que ocurre en la interfaz del software ejecutándose
en la PC genera una interrupción que produce que se realice una tarea en la controladora
de movimientos. Este es el tipo de sincronización que existe entre los dos programas a
nivel de tareas y es mostrado gráficamente en la figura 4.2.
Ejecutándose en la PC y controlando todo el Sistema a través de una DAQ NI 6229 y el puerto serial RS232
Ejecutándose en la Tarjeta controladora de movimientos DMC-2133 y comuni-candose con la PC a través del RS232

Capítulo 4. Software
Página 46
Fig. 4.2 Sincronización entre el software ejecutándose en la PC y la DMC 2133
4.2 INTERFACES DEL SOFTWARE EJECUTÁNDOSE EN LA PC El software desarrollado de lado de la PC con LabView es llamado FerroMicroElechem y
tiene diversas interfaces, cada una con su función particular, en las siguientes secciones
se describen cada una de ellas.
4.2.1 Interfaz Común El área común de la interfaz del usuario permite realizar tareas que son útiles en varias de
las aplicaciones que el software puede realizar. Prender y apagar el electrodo auxiliar del
potenciostato, realizar movimientos rápidos o lentos para bajar la punta, mover la posición
de el electrodo en el plano X,Y a diferente velocidad o localizarlo en un lugar especifico
son tareas que se pueden realizar en esta área de la interfaz. También en esta área se
obtiene el nivel o inclinación del plano del sustrato a estudiar y se puede dar un reset al
controlador de movimiento para que se detenga el programa en ejecución cargado en él,
esta área se muestra delimitada por rectángulos en la figura 4.3.
4.2.2 Interfaz de la Configuración Inicial del Experimento La primera pantalla del software permite almacenar información referente al experimento
a realizar y controla completamente el potenciostato, el usuario define en esta zona el
rango de la corriente a utilizar y el potencial aplicado a la celda, controla el modo de

Capítulo 4. Software
Página 47
operación del equipo (Potenciostato o Galvanostato) y el modo de control (manual o
remoto), aquí también se define el tamaño del microelectrodo a utilizar en caso de ser un
experimento de microscopía electroquímica. La interfaz de esta configuración inicial y
control del potenciostato se muestra en la figura 4.3 junto a la interfaz común.
Fig. 4.3 Interfaz común del software y configuración inicial del experimento
4.2.3 Interfaz de Generación de Curvas de Acercamiento En esta área de software, se carga el programa que ejecutará el controlador de
movimiento, y se pueden enviar comandos a él directamente y obtener su respuesta en
una ventana similar a la de una terminal. Una vez cargado el programa al controlador se
pueden realizar movimientos largos (3.6 micras) y movimientos cortos (0.25 micras) en el
acercamiento/alejamiento del UME a la superficie a estudiar, esto a través de los
controles en el área común. También se pueden efectuar movimientos automáticos, estos
movimientos permiten al usuario realizar otras tareas mientras la punta baja o sube, sin
necesidad de que esté alerta de la proximidad entre la punta y la superficie estudiada, o
pendiente de la llegada del eje Z al final de su recorrido. El software está programado
para evitar posible daños al UME o al motor, esto es, en un movimiento automático
acercándose a la superficie la punta se detiene al llegar a la zona de transición de
corriente, en un movimiento automático alejándose de la superficie la punta se detiene al
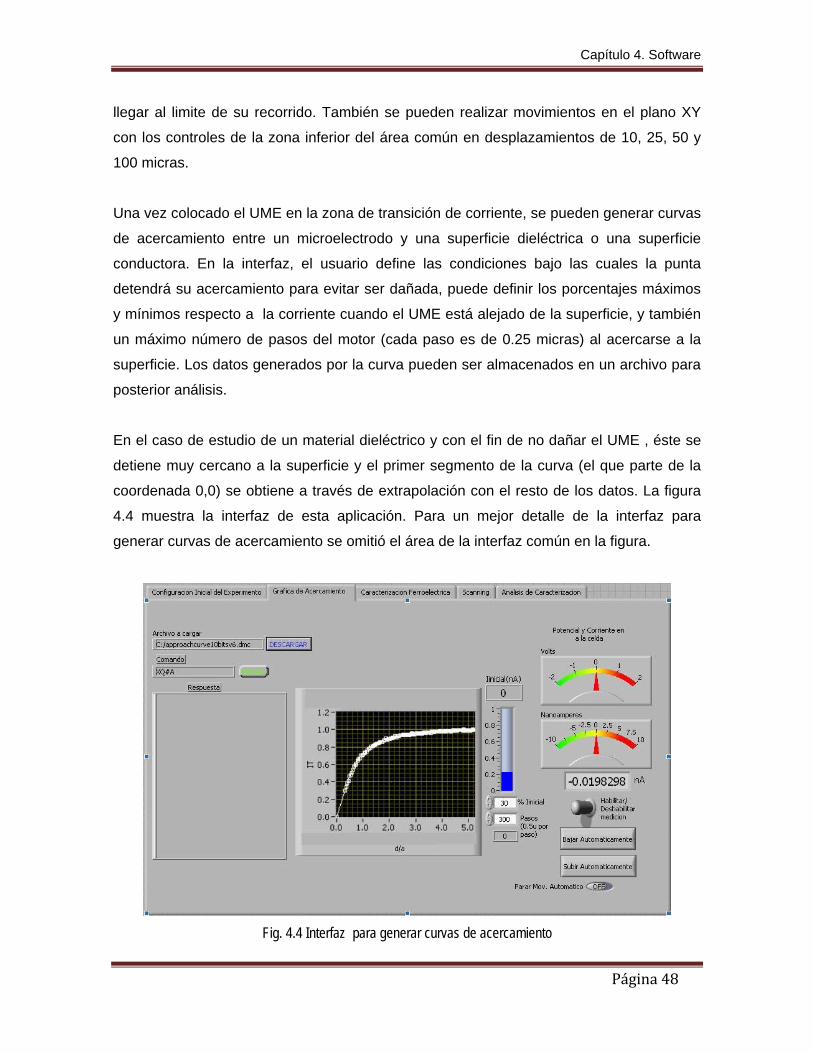
Capítulo 4. Software
Página 48
llegar al limite de su recorrido. También se pueden realizar movimientos en el plano XY
con los controles de la zona inferior del área común en desplazamientos de 10, 25, 50 y
100 micras.
Una vez colocado el UME en la zona de transición de corriente, se pueden generar curvas
de acercamiento entre un microelectrodo y una superficie dieléctrica o una superficie
conductora. En la interfaz, el usuario define las condiciones bajo las cuales la punta
detendrá su acercamiento para evitar ser dañada, puede definir los porcentajes máximos
y mínimos respecto a la corriente cuando el UME está alejado de la superficie, y también
un máximo número de pasos del motor (cada paso es de 0.25 micras) al acercarse a la
superficie. Los datos generados por la curva pueden ser almacenados en un archivo para
posterior análisis.
En el caso de estudio de un material dieléctrico y con el fin de no dañar el UME , éste se
detiene muy cercano a la superficie y el primer segmento de la curva (el que parte de la
coordenada 0,0) se obtiene a través de extrapolación con el resto de los datos. La figura
4.4 muestra la interfaz de esta aplicación. Para un mejor detalle de la interfaz para
generar curvas de acercamiento se omitió el área de la interfaz común en la figura.
Fig. 4.4 Interfaz para generar curvas de acercamiento

Capítulo 4. Software
Página 49
4.2.4 Interfaz de Morfología de Superficies Esta parte del software obtiene la morfología de una superficie con la técnica de altura
constante, esto es la punta se mueve horizontalmente sobre el plano X-Y a la misma
altura, la figura 4.5 muestra el principio de esta técnica. Al moverse sobre la superficie la
corriente en la punta del SECM variara de acuerdo a la cercanía de la superficie
estudiada, la magnitud de la corriente indexada con la información de una curva de
acercamiento nos da la morfología correspondiente de la superficie. A través de un
interruptor en la interfaz de esta aplicación se puede elegir el desplegar una gráfica de
corriente o una grafica de morfología al realizar el scanning. Una grafica de corriente es
útil si se tiene una sustrato compuesto con materiales de diferente comportamiento, por
ejemplo secciones conductoras y secciones dieléctricas en una misma superficie, con
está gráfica se puede determinar las zonas conductoras y las zonas dieléctricas de la
superficie escaneada.
Fig. 4.5 Técnica de altura constante para obtener morfología de superficies
El software permite definir un área rectangular a escanear, la velocidad de escaneo y va
mostrando gráficamente el comportamiento de la superficie que esta siendo escaneada,
permite también almacenar los datos de este rastreo para un análisis posterior de los
mismos. La interfaz de esta aplicación también cuenta con controles que permiten ver en
diferentes modos la morfología de la superficie del material estudiado.
Antes de ejecutar la tarea de “scanning” para obtener una morfología, se debe haber
generado una curva de acercamiento y se debió de haber efectuado el calculo de la
nivelación actual de la superficie a estudiar a través del botón “Calcula Nivelación de

Capítulo 4. Software
Página 50
Superficie”, éste se encuentra en la parte inferior del área común y tiene como objetivo
obtener la pendiente de la superficie, esto con el fin de enviar al controlador de
movimiento los ajustes correspondientes del desplazamiento de los ejes durante el
proceso de scanning y mantener efectivamente una altura constante del microelectrodo
respecto a la muestra a estudiar. En la figura 4.5 se muestra la interfaz de la sección de
Scanning .
Fig. 4.6 Interfaz para obtener morfología de superficies
4.2.5 Interfaz de Caracterización del Material Ferroeléctrico Esta sección del software se desarrolló con el fin de caracterizar materiales
ferroeléctricos, esto debido a que una línea de investigación de nuestro grupo es el
estudio de este tipo de materiales. Una de nuestras próximas metas es lograr caracterizar
este tipo de materiales a través de la punta del SECM, ya hemos logrado caracterizar
películas ferroeléctricas utilizando el potenciostato como herramienta de medición y
pretendemos hacerlo en corto tiempo a través del SECM ya que el software desarrollado
en esta parte ya está preparado para hacerlo y sólo falta la etapa de experimentación.

Capítulo 4. Software
Página 51
El circuito usado comúnmente para la medición de propiedades del fenómeno
ferroeléctrico es el Tower-Sawyer [50], este circuito puede ser implementado a través de
un amplificador operacional como se muestra en la figura 4.7. Cfe es el capacitor
ferroeléctrico a estudiar, Cr es un capacitor de retroalimentación de valor conocido, Vin es
el potencial aplicado a la muestra y Vout es el potencial de salida. Tanto Cfe, como Cr se
encuentran conectados a tierra virtual pues ambas entradas del circuito operacional se
mantienen siempre al mismo potencial, como consecuencia de esto Cfe recibe
completamente el potencial Vin y la carga viajando a través del capacitor estudiado, solo
puede fluir a través de Cr debido a la elevada impedancia de entrada del operacional, por
lo que el potencial de salida es proporcional a la carga de Cr debido a que Vout = Q/Cr,
entonces la polarización es obtenida dividiendo Q entre el área de las placas de Cfe.
Fig. 4.7.- Circuito Tower-Sawyer para medir propiedades ferroeléctricas
Para fines prácticos se considera que los circuitos operacionales tienen una impedancia
de entrada infinita, la realidad es que no es así, su impedancia de entrada oscila entre los
cientos de megaohms a miles de megaohms. Nuestra configuración usa el POT/GAL, éste
puede considerarse como un amplificador operacional ideal en muchos sentidos, la
configuración simplificada de la operación típica de un potenciostato controlando una
celda electroquímica se muestra en la figura 4.8. La celda electroquímica es en si la red
de retroalimentación del operacional(POT/GAL) y éste provee la suficiente corriente a
través de su electrodo auxiliar para que el potencial entre el electrodo de trabajo y el de
referencia siga exactamente al potencial de control.

Capítulo 4. Software
Página 52
Fig. 4.8 El potenciostato operando como un operacional ideal
Aprovechando las características del POT/GAL implementamos una red sencilla para
realizar el estudio de capacitores ferroeléctricos, sustituimos la celda por la muestra
ferroeléctrica y una red de una resistencia y un capacitor de valores conocidos en
paralelo.
Fig. 4.9 Configuración para caracterización de capacitores ferroeléctricos
La interfaz desarrollada caracteriza una muestra de material ferroeléctrico utilizando el
potenciostato, el usuario define parámetros como el tipo de señal a aplicar a la muestra
(senoidal, triangular,etc.), la frecuencia, la amplitud del potencial a aplicar y el tipo de

Capítulo 4. Software
Página 53
caracterización (en un solo rango de corriente , en dos rangos de corriente ó automática
– el software rastrea los rangos de corriente más adecuados para la caracterización-,) .
Se filtra a través de la técnica de FTT el ruido de 60Hz inducido en las lecturas de muy
bajas corrientes en el equipo y se permite al usuario almacenar los datos obtenidos de la
caracterización. La figura 4.10 muestra la interfaz del programa que despliega
gráficamente la caracterización, así como el potencial aplicado y la corriente leída en la
muestra ferroeléctrica.
Fig. 4.10 Interfaz para realizar caracterización ferroeléctrica
4.2.6 Interfaz del Análisis de ciclos de Histéresis En esta aplicación del software se leen los archivos conteniendo los ciclos de histéresis
de la caracterización ferroeléctrica y se obtienen parámetros importantes como el
potencial coercitivo y la polarización remanente del ciclo, se muestra en la misma gráfica
cada curva leída para hacer una comparación visual entre varias corridas de la misma
muestra o entre corridas excitadas a diferente potencial o frecuencia. Se muestra el
contenido del archivo de datos de la última curva de histéresis leída y se permite realizar
acercamientos o alejamientos en diferentes secciones de la gráfica(zoom y pan). La figura
4.11 muestra esta sección del software.
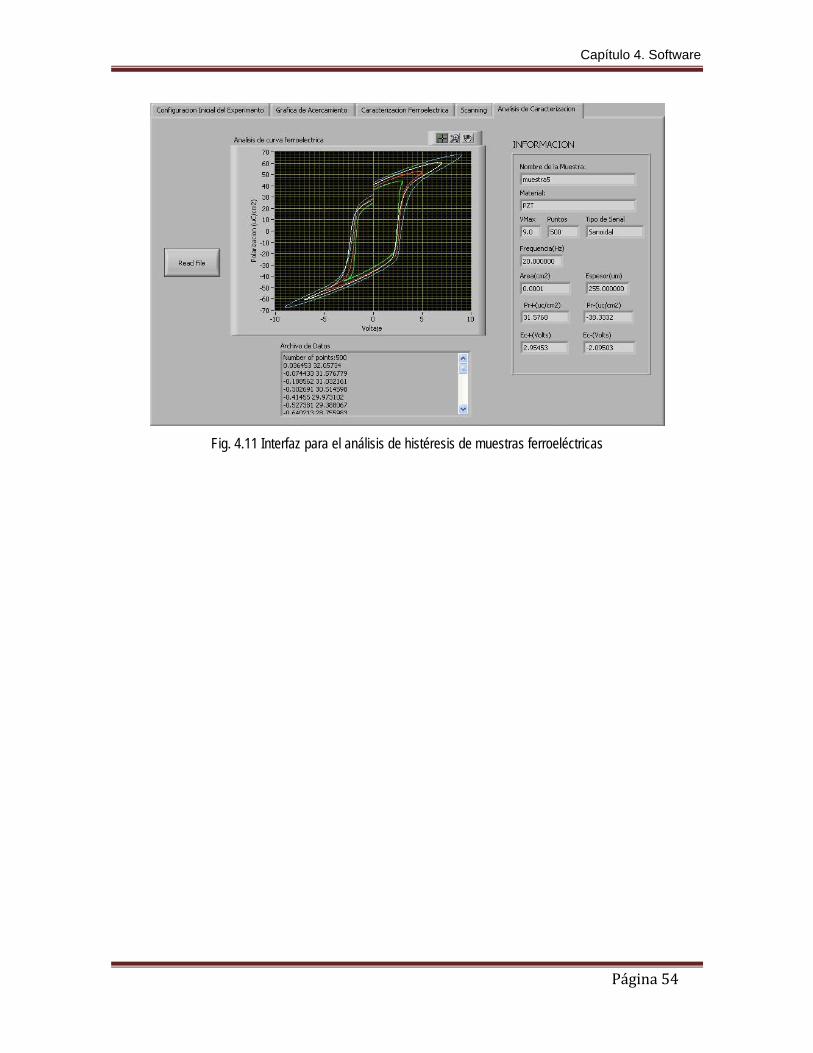
Capítulo 4. Software
Página 54
Fig. 4.11 Interfaz para el análisis de histéresis de muestras ferroeléctricas
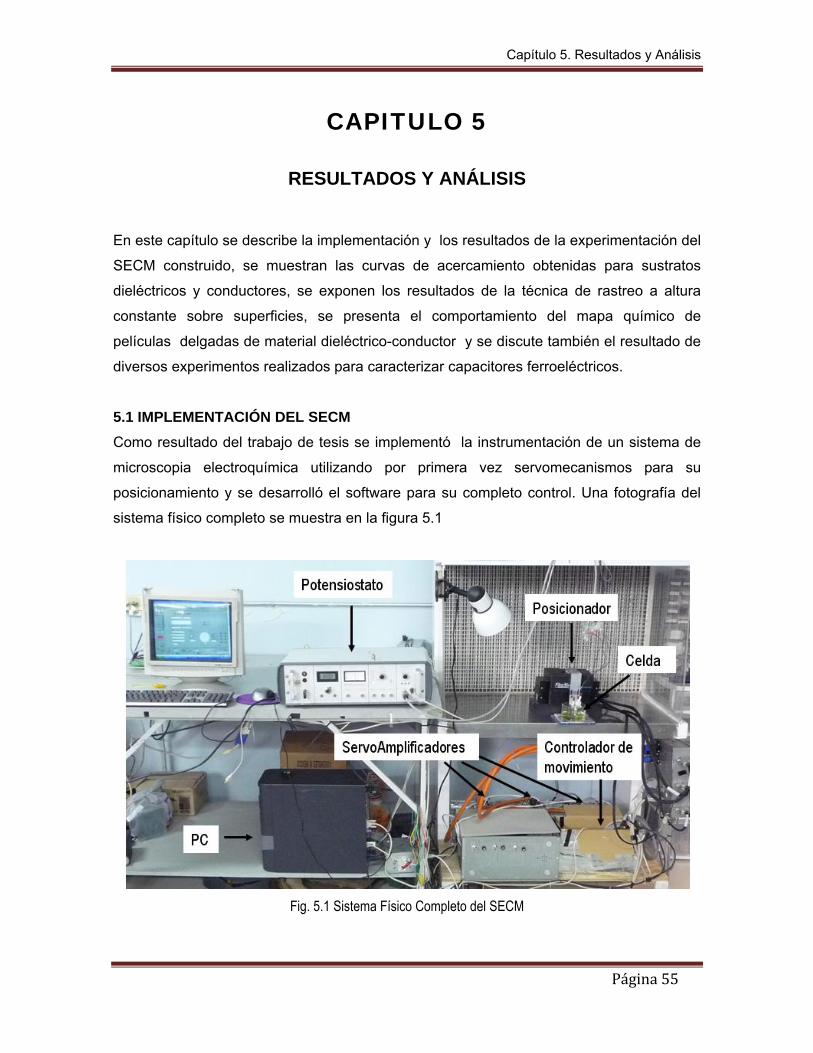
Capítulo 5. Resultados y Análisis
Página 55
CAPITULO 5
RESULTADOS Y ANÁLISIS
En este capítulo se describe la implementación y los resultados de la experimentación del
SECM construido, se muestran las curvas de acercamiento obtenidas para sustratos
dieléctricos y conductores, se exponen los resultados de la técnica de rastreo a altura
constante sobre superficies, se presenta el comportamiento del mapa químico de
películas delgadas de material dieléctrico-conductor y se discute también el resultado de
diversos experimentos realizados para caracterizar capacitores ferroeléctricos.
5.1 IMPLEMENTACIÓN DEL SECM Como resultado del trabajo de tesis se implementó la instrumentación de un sistema de
microscopia electroquímica utilizando por primera vez servomecanismos para su
posicionamiento y se desarrolló el software para su completo control. Una fotografía del
sistema físico completo se muestra en la figura 5.1
Fig. 5.1 Sistema Físico Completo del SECM

Capítulo 5. Resultados y Análisis
Página 56
Para lograr un optimo posicionamiento del SECM construido se entonaron los motores a
través de la sección Storage Scopes del software Windows Servo Design Kit de Galil Inc.
y se obtuvieron los parámetros PID del filtro del controlador para cada eje. La tabla 5.1
muestra los parámetros de cada uno de los ejes.
Tabla 5.1 Parámetros PID del filtro del controlador para cada eje
KP KI KD
Eje X 2.0 1.0 6.0
Eje Y 9.0 1.5 13.0
Eje Z
(desplazamientos de .250 micras)
2.5 10 1.5
Eje Z(desplazamientos de 3.75 micras)
3.0 1.9 7.0
Como muestra de una entonación se despliega en la figura 5.2 el resultado de
desplazamientos de 25 micras comandados al eje Y, en la gráfica mostrada se observan 3
“escalones” correspondientes a 3 movimientos comandados de 25 micras. Nótese que la
posición comandada es seguida casi exactamente por la posición actual del eje Y,
excepto en el arranque del primer movimiento, esto debido probablemente a la fricción
inicial en el desplazamiento del eje. Cuando la posición del eje del motor coincide con la
posición comandada, como lo es en este caso, los parámetros PID del filtro son los
adecuados. Explorando más opciones del filtro del controlador (por ejemplo el comando
FA), seguramente es posible corregir la pequeña variación al arranque del movimiento en
este eje.

Capítulo 5. Resultados y Análisis
Página 57
Fig. 5.2 Gráfica de entonación del eje Y para movimientos de 25 micras (2777 cuentas del encoder)
Utilizando también Storage Scopes se determinó la precisión en los movimientos de cada
eje obteniéndose una desviación máxima de alrededor de 70 nanómetros en los ejes X y
Y mientras que para el eje Z se logró una desviación máxima de alrededor de 8
nanómetros.
Fig. 5.3 A)Respuesta del motor X a un movimiento comandado de 25 micras(2777 cuentas del encoder) B)
Señal de error (Posición comandada vs. Posición actual) C) Acercamiento de la señal de error

Capítulo 5. Resultados y Análisis
Página 58
En la figura 5.3A se observa la respuesta del eje X a un movimiento comandado de 25
micras, en la 5.3B se muestra la señal del error de posición y en la 5.3C la señal de error
amplificada en una sección. Nótese que al principio del movimiento el error de posición es
grande y llega a casi 405 cuentas del encoder (alrededor de 3.6 micras), esto en realidad
no es importante ya que el interés se centra en el error que existe cuando el eje llega a la
posición comandada. En la figura 5.3C se observa que cuando se llega a la posición
comandada hay una desviación de alrededor de 8 cuentas de la posición comandada,
esto equivale a una desviación máxima de +/- 72 nanómetros en la posición para este eje.
Las desviaciones en la posición son debidas al ruido electromagnético inducido en las
líneas por las fluctuaciones de corriente en los motores y a los campos eléctricos de la
vecindad. Haciendo un estudio exhaustivo acerca de las fuentes de ruido que produce
estas variaciones y tomando medidas al respecto es posible reducir estos niveles de error.
5.2 RESULTADOS DE VOLTAMPEROMETRÍA CÍCLICA SOBRE UME´s Utilizando el software CPCKPC de Bank Elektronic se obtuvieron voltamperogramas para
encontrar la zona de potenciales que separan los procesos catódicos y anódicos para las
especies electroactivas utilizadas en nuestros experimentos. Las especies utilizadas
fueron Ferricianuro de Potasio -K3Fe(CN)6- y Cloruro de HexaaminoRutenio -
Ru(NH3)6Cl3-, ambas sustancias presentan electroactividad bien definida, la ventaja de
Ru(NH3)6Cl3 sobre K3Fe(CN)6 es que es mas estable en su comportamiento pues
K3Fe(CN)6 es afectado por la luz y se degrada o cambia su comportamiento con el paso
del tiempo, la ventaja de K3Fe(CN)6 sobre Ru(NH3)6Cl3 es que es una especie mucho mas
económica y fácil de conseguir.
La figura 5.4A muestra un voltamperograma para el K3Fe(CN)6 , La figura 5.4B para
Ru(NH3)6Cl3 , en ambas especies se utilizaron soluciones conteniendo 0.5M de KCl, un
electrodo de referencia Ag/AgCl , un UME de 25μ de diámetro y concentraciones de 1mM
para K3Fe(CN)6 y de 1.2mM para Ru(NH3)6Cl3 , la razón de cambio de potencial para el
K3Fe(CN)6 fue de 3mV/seg y de 30mv/seg para el Ru(NH3)6Cl3. Los voltamperogramas se
corrieron de -500mv a 500mv para el K3Fe(CN)6 y de -500mv a 100mv para el
Ru(NH3)6Cl3. La corriente graficada esta en escala logarítmica. Se observa de las curvas
mostradas que para el K3Fe(CN)6 la zona catódica empieza en potenciales debajo de los
300 mv mientras que para el Ru(NH3)6Cl3 debajo de los 0 volts. La distancia entre los

Capítulo 5. Resultados y Análisis
Página 59
potenciales de transición(picos) es menor en el K3Fe(CN)6 debido a una mucho menor
razón en el cambio de potencial utilizado.
Fig. 5.4 Voltamperogramas para identificación de zonas catódicas A)K3Fe(CN)6 y B)Ru(NH3)6Cl3
Para comprobar la operación correcta de los UME´s utilizados, se graficaron en escalas
lineales los datos de los diferentes voltamperogramas efectuados con el software
CPCKPC, obteniéndose curvas sigmoidales características de un proceso controlado por
difusión (ver figura 5.5).

Capítulo 5. Resultados y Análisis
Página 60
Fig. 5.5 Comprobación de comportamiento sigmoidal de UME´s
La figura 5.5 muestra 3 formas sigmoidales de experimentos de voltamperometría cíclica
utilizando UME´s de 10μ de diámetro con un barrido de potencial de -450mv a 100mV con
razones de cambio en el potencial de 10mv/seg , 30 mv/seg y 60 mv/seg utilizando una
solución de Ru(NH3)6Cl3 a una concentración de 3.3mM y 0.5M de KCl confirmando el
comportamiento del UME descrito en el capítulo 2.
5.3 RESULTADOS DEL SOFTWARE IMPLEMENTADO EN LA PC Se desarrolló un software en LabView que realiza los siguientes tipos de experimentación
de microscopía electroquímica.
5.3.1 Curvas de Acercamiento En microscopía electroquímica una curva de acercamiento se obtiene aproximando el
microelectrodo a una superficie dentro de una solución conteniendo una especie
electroactiva y se mide la corriente que circula por el microelectrodo, el comportamiento
es diferente dependiendo del material que se encuentra en la superficie a la cual se
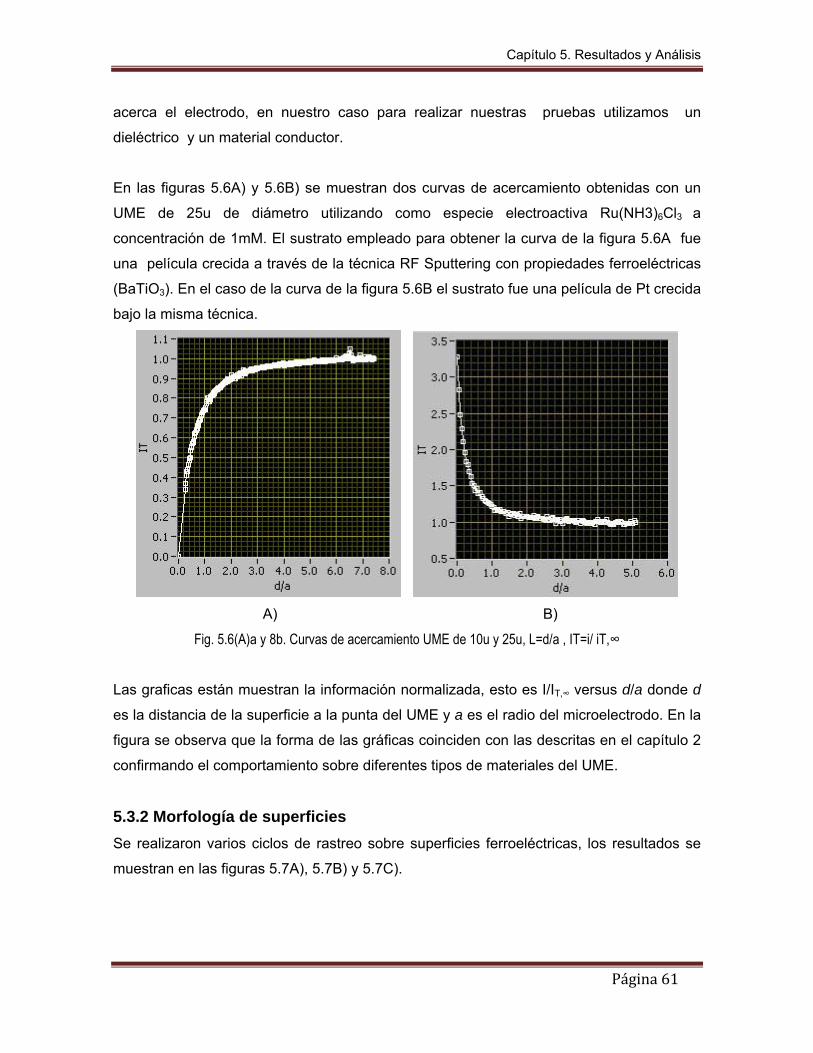
Capítulo 5. Resultados y Análisis
Página 61
acerca el electrodo, en nuestro caso para realizar nuestras pruebas utilizamos un
dieléctrico y un material conductor.
En las figuras 5.6A) y 5.6B) se muestran dos curvas de acercamiento obtenidas con un
UME de 25u de diámetro utilizando como especie electroactiva Ru(NH3)6Cl3 a
concentración de 1mM. El sustrato empleado para obtener la curva de la figura 5.6A fue
una película crecida a través de la técnica RF Sputtering con propiedades ferroeléctricas
(BaTiO3). En el caso de la curva de la figura 5.6B el sustrato fue una película de Pt crecida
bajo la misma técnica.
A) B)
Fig. 5.6(A)a y 8b. Curvas de acercamiento UME de 10u y 25u, L=d/a , IT=i/ iT,∞
Las graficas están muestran la información normalizada, esto es I/IT,∞ versus d/a donde d
es la distancia de la superficie a la punta del UME y a es el radio del microelectrodo. En la
figura se observa que la forma de las gráficas coinciden con las descritas en el capítulo 2
confirmando el comportamiento sobre diferentes tipos de materiales del UME.
5.3.2 Morfología de superficies Se realizaron varios ciclos de rastreo sobre superficies ferroeléctricas, los resultados se
muestran en las figuras 5.7A), 5.7B) y 5.7C).

Capítulo 5. Resultados y Análisis
Página 62
Fig. 5.7A) Comportamiento de la corriente lejos de la superficie-sin eliminación de señal de -,B) lejos de la superficie con eliminación de señal de 60 Hz C) cerca de la superficie
La velocidad de escaneo para todas las graficas es de 25 µ/seg , la primer gráfica (fig.
5.7A) muestra un rastreo de un área de 750 X 750 µ2 alejada de la superficie
ferroeléctrica, en dicha gráfica aún no se eliminaba el ruido de 60 Hz inherente a la lectura
de muy bajas corrientes con el potenciostato. El ruido puede disminuirse usando una jaula
de Faraday en nuestra celda electroquímica y/o utilizando un buen sistema de tierra física.
La señal de 60 Hz fue eliminada leyendo la información de la corriente del potenciostato a

Capítulo 5. Resultados y Análisis
Página 63
una velocidad de muestreo de 480Hz (la cual es múltiplo de 60Hz) y promediando 8
mediciones, con esto la componente de 60Hz fue extraída de la señal de corriente leída.
En la segunda gráfica (fig. 5.7B) se muestra la misma área de escaneo pero ahora con
eliminación de la señal de 60Hz inducida en la medición, se observa en esta gráfica una
medición prácticamente constante tal como lo predice la teoría descrita en el capítulo 2.
En la tercer gráfica (fig. 5.7C) se muestra un escaneo cercano a la superficie y se observa
la disminución de corriente respecto al valor lejos de la superficie. En la grafica se
muestra cierto declive en la superficie y también hay pequeños picos que representan
ruidos inducidos al sistema de medición y que pueden ser eliminados con filtros de
software . La morfología de esta gráfica es similar a la morfología exacta de la película en
la zona explorada, sin embargo la morfología exacta de la película se obtiene indexando
la información de esta curva con la información de la curva de acercamiento entre el UME
y la película.
5.3.3 Mapeo químico Una de las aplicaciones más útiles del SECM es la detectar zonas activas o pasivas en
superficies estudiadas. Se creció una película con dos zonas bajo la técnica de RF
Sputtering, una zona fue de Pt y la otra de BaTiO3, una fotografía de dicha película se
muestra en la figura 5.8 , La zona oscura es el material ferroeléctrico BaTiO3 y la zona
clara(de mayor área) es Pt.
Fig. 5.8 Fotografía de película con zona pasiva y activa
Usando un UME de 25micras de diámetro se hizo un scanning muy cercano a las
superficies y sobre la frontera de ambas superficies, la corriente del UME lejos de la
superficies fué de 1.1 nA, al efectuar el scanning en la zona no activa (material
ferroeléctrico) la corriente disminuyó a fracciones de nanoampere, al pasar la frontera
hacia la zona activa(Pt) la corriente se elevó a un rango entre 2 y 3 nanoamperes
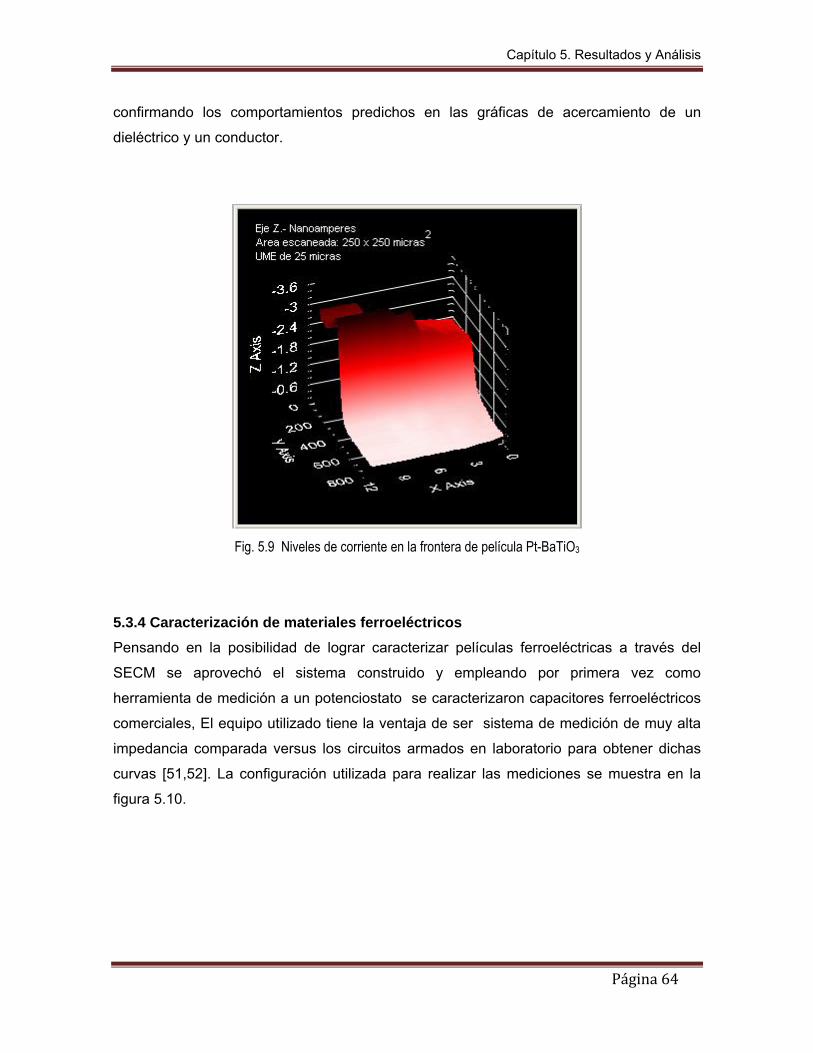
Capítulo 5. Resultados y Análisis
Página 64
confirmando los comportamientos predichos en las gráficas de acercamiento de un
dieléctrico y un conductor.
Fig. 5.9 Niveles de corriente en la frontera de película Pt-BaTiO3
5.3.4 Caracterización de materiales ferroeléctricos Pensando en la posibilidad de lograr caracterizar películas ferroeléctricas a través del
SECM se aprovechó el sistema construido y empleando por primera vez como
herramienta de medición a un potenciostato se caracterizaron capacitores ferroeléctricos
comerciales, El equipo utilizado tiene la ventaja de ser sistema de medición de muy alta
impedancia comparada versus los circuitos armados en laboratorio para obtener dichas
curvas [51,52]. La configuración utilizada para realizar las mediciones se muestra en la
figura 5.10.

Capítulo 5. Resultados y Análisis
Página 65
Fig. 5.10 Configuración para caracterizar muestras ferroeléctricas
El circuito es muy simple y los valores de R y C dependen del máximo valor de potencial
que puede proporcionar el potenciostato a través del electrodo auxiliar – en nuestro caso
fue de 33 volts - y de la corriente instantánea máxima que pueda producirse en el circuito.
Dependiendo del área del capacitor a caracterizar se utilizaron resistencias en el rango de
2.2 kΩ-1.2 MΩ y capacitores en el rango de 1 nF-22 nF, la función de la resistencia es el
reducir el potencial que llega desde el electrodo auxiliar y la del capacitor es la de
proporcionar la carga abrupta que demanda el capacitor ferroeléctrico en su zona de
transición de corriente.
Con el objetivo de validar el sistema de mediciones desarrollado, se caracterizaron
capacitores de 4000 μ2 y 10,000 μ2 de área y 255 nm de espesor a diferentes voltajes (1-9
Volts) y frecuencias de excitación (1-45 Hz). Esto fue realizado utilizando el sistema de
mediciones desarrollado y un equipo comercial de Radiant Technologies. Cabe hacer
mención de que se escogieron estos capacitores debido a que: a) el de 4000 μ2 es el de
menor área que puede ser caracterizado con nuestro sistema desarrollado debido a sus
muy bajas corrientes (de fracciones de nanoamperes) y a que la escala menor de
corriente en nuestro POT/GAL es de 100 nA, y b) el equipo de Radiant está limitado para
áreas menores a 10,000 μ2 para el tipo de capacitores probados.
En la Fig. 5.11 Se pueden observar los resultados de la caracterización del capacitor de
10,000µ2 de área excitados a 8 volts y a diferentes frecuencias y la misma
caracterización hecha en un equipo de Radiant Technologies. Se puede observar que el
capacitor tiene un comportamiento muy similar a diferentes frecuencias, se nota también
en nuestra medición una pequeña distorsión y doblez en los extremos debido a la falta de

Capítulo 5. Resultados y Análisis
Página 66
compensación en el circuito utilizado en la medición, la solución a los problemas de
compensación es discutido por varios autores[53-55] .
Fig. 5.11 Caracterización de capacitor PZT a diferentes frecuencias.
A)Configuración utilizando el potenciostato B)Equipo de Radiant Technologies
Nótese que para estos capacitores el movimiento abrupto de la carga se da en la región
de ±2.5V, este es el potencial que se requiere para observar el fenómeno ferroeléctrico,
excitando el capacitor a potenciales menores se obtiene solo una línea recta característica
del comportamiento de un dieléctrico lineal. El rompimiento de la curva en una

Capítulo 5. Resultados y Análisis
Página 67
caracterización es debido al que algunos dominios del material se relajan entre ciclos de
la señal de excitación enviada y se termina con una menor polarización el ciclo, esto no es
un comportamiento anormal y sucede frecuentemente en una caracterización
ferroeléctrica.
Dos de los parámetros más importantes que definen el comportamiento del material
ferroeléctrico son la polarización remanente(Pr) y el potencial coercitivo(Vc), En la tabla
5.2 se reportan los resultados de 10 mediciones hechas a capacitores de 4000 μ2 y
10000μ2 de área, se reporta la media ± la desviación estándar de la medición con nuestra
configuración. En esta tabla podemos observar que los resultados obtenidos utilizando el
sistema desarrollado, comparado con el sistema de Radiant Technologies son bastante
aproximados, esto confirma la operación adecuada del sistema propuesto para realizar la
caracterización
Tabla 5.2 media ± desviación estándar de la polarización remanente y el potencial coercitivo de capacitores
de 4000 y 10000 µ2 de área y 255nm de espesor excitados senoidalmente a 40Hz, 7 volts pico a pico.
Pr+ (μC/cm2) Pr- (μC/cm2) Vc+ (volts) Vc- (volts) Medición Exp. CAP 4,000 µ 2 26.99± 0.90 -34.49 ± 0.57 2.72± 0.02 -1.94 ± 0.01
Radiant Tech. CAP 4,000 µ 2
29.5± 0.05 -31.21 ± 0.06 2.84 ± 0.05 -1.98 ± 0.01
Medición Exp. CAP 10,000 µ 2 27.84 ± 1.12 -33.94 ± 0.62 2.90 ± 0.03 -1.85 ± 0.02
Radiant Tech. CAP 10,000 µ 2 30.43± 0.04 -31.94 ± 0.05 3.05 ± 0.03 -1.62 ± 0.01

Capítulo 6. Conclusiones
Página 69
CAPITULO 6
CONCLUSIONES, APORTACIONES Y PROPUESTA DE TRABAJOS FUTUROS
6.1 CONCLUSIONES
• Se construyó un sistema completo para realizar microscopía electroquímica, el
sistema mostró ser funcional y práctico.
• Se diseño un software modular para el control total del microscopio desarrollado, el
software controló adecuadamente la instrumentación del microscopio para las
tareas que fueron programadas.
• Se obtuvieron curvas de acercamiento sobre sustratos dieléctricos y conductores,
las curvas fueron congruentes con la teoría de microscopía electroquímica.
• Se logró obtener morfologías y mapas químicos sobre superficies dieléctricas y
conductoras.
• Se añadió al software un módulo para caracterización de materiales ferroeléctricos
utilizando el potenciostato, se compararon los resultados con las mediciones en un
equipo de Radiant Technologies y concordaron en gran medida.
6.2 APORTACIONES En México sólo existe un equipo de microscopía electroquímica, éste se encuentra
ubicado en el CINVESTAV Mérida y fue construido por el Dr. David Wipf, responsable
directo de la instrumentación del primer SECM construido. La idea y visión original del Dr.
Álvaro Zapata de implementar este tipo de instrumento científico, es sin duda un gran
aporte a la ciencia en México, ya que muy poco se conoce del potencial y las aplicaciones
del instrumento construido. Se abre entonces una brecha para que las futuras
generaciones de investigadores lo puedan emplear en pro de la ciencia y del desarrollo
tecnológico.
El diseño del SECM fue planeado con el fin de obtener posicionamientos de muy alta
precisión y se hizo una exhaustiva selección de componentes antes de su

Capítulo 6. Conclusiones
Página 70
implementación. Aunque ciertamente algunos componentes fueron adquiridos de medio
uso por la limitación de recursos económicos, la tecnología utilizada en ellos es de punta.
Se exploró por primera el uso de servomecanismos y una tarjeta controladora de
movimiento en la tarea de posicionamiento del microelectrodo del SECM. Aprovechamos
la característica de interpolación lineal que provee tarjeta DMC 2133 para obtener
recorridos a altura constante no importando la inclinación o declive que la muestra tuviese
dentro de la celda electroquímica, para obtener dicho declive se diseñó una técnica
generando curvas de acercamiento en 3 diferentes puntos de la superficie, esta técnica no
ha sido reportada aún en la literatura del SECM, y estamos en proceso de publicar un
artículo al respecto.
Se desarrolló un software en LabView y se programó la tarjeta controladora de
movimientos para realizar diversas tareas de microscopía electroquímica, el software es
modular por lo que puede crecer de acuerdo a las necesidades específicas de las tareas
de investigación que se desean realizar. Cabe mencionar aquí que el software que se
proporciona en la compra de un SECM comercial contiene sólo tareas básicas de
microscopía electroquímica y no es escalable debido a los derechos de propiedad
intelectual.
Se integró al software desarrollado un módulo que permite caracterizar materiales
ferroeléctricos, esto con el fin de que en un trabajo cercano sea posible caracterizar en un
medio químico este tipo de materiales.
Se obtuvo un premio institucional en el Instituto Politécnico Nacional en el año 2008 al
mejor software en la categoría de Posgrado por el software desarrollado para el sistema
de microscopía construido en nuestro centro.
6.3 TRABAJOS FUTUROS A pesar de que el equipo ha demostrado su operatividad, aún quedan tareas importantes
que realizar en el mismo. La calibración en el desplazamiento de los ejes, la disminución
del ruido en el sistema, la depuración del software desarrollado, la entonación fina de los
motores y la implementación del método de distancia constante para obtener imágenes de

Capítulo 6. Conclusiones
Página 71
mejor resolución, son entre otras cosas, tareas que deben de ser llevadas a cabo para su
mejor operación y aprovechamiento.
Existen también muchas y diversas tareas que potencialmente se pueden realizar con el
SECM construido dentro de nuestro grupo de trabajo, entre ellas podemos mencionar:
a) caracterización de materiales ferroeléctricos en medio químico
b) medición de espesores de películas
c) estudio del comportamiento de óxidos dopados
d) estudio y desarrollo de biomateriales
e) realizar microdeposición y/o microdesgaste sobre películas delgadas
Es importante mencionar que algunas de las tareas mencionadas requieren un desarrollo
de software adicional para ser llevadas a cabo, por esto es indispensable contar con
personal preparado para hacer este tipo de labor o cualquier modificación futura al SECM
construido.

Referencias
Página 72
REFERENCIAS
[1] D.O. Wipf, A. J. Bard, Scanning Electrochemical Microscopy. 15. Improvements in
Imaging via Tip-Position Modulation and Lock-in Detection, Anal. Chem. 1982, 64,
1362-1367,
[2] M.V. Mirkin, Microchim Acta 130:127, 1999
[3] Rd Martin, P.R. Unwin, J Chem Soc Faraday Trans 1998, 94:753,
[4] J Wang, L-H Wu, R Li. Scanning electrochemical microscopic monitoring of
biological processes. J. Electroanal Chem 1989, 272:285-292,
[5] Z. Zamec, T. Kakiuchi, H. Gerischer, C.W. Tobias, eds. Advances in
Electrochemical Science and Electrochemical Engineering. Vol 4. New York: VCH,
1995, p 297
[6] P.R. Unwin, A.J. Bard, Scanning electrochemical microscopy. 14. Scanning
electrochemical microscope induced desorption: a new technique for the
measurement of adsorption/desorption kinetics and surface diffusion rates at the
solid/liquid interface, J Phys Chem, 1992, 96:5035,
[7] J.V. Macpherson, P.R. Unwin, A.C. Hillier, A.J. Bard. , In-Situ Imaging of Ionic
Crystal Dissolution Using an Integrated Electrochemical/AFM Probe ,J Am Chm
Soc 1996, 118:6445,
[8] D.O. Wipf. Colloids Surfaces A Physicochem Eng Aspects , 1994, 93:251
[9] F.R. Fan, A.J. Bard, Electrochemical Detection of Single Molecules, Science 1995,
267:871
[10] Y. Selzer, I. Turyan, D. Mandler, Studyng heterogeneous catalysis by SECM: the
reduction of protons by methyl viologen catalyzed by a platinum surface. J Phys
Chem B , 1999, 103:1509-1517
[11] K Borgwarth, DG Ebling, J Heinze. Scanning Scanning electrochemical microscopy
a new scanning mode based on convective effects. Ber Bunsen Ges Phys Chem ,
1994, 98:1317-1321
[12] http://exfo-burleigh.com
[13] http://www.chinstruments.com
[14] http://www.uniscan.com
[15] P. M. Diakowski, Z. Ding, Novel strategy for constant-distance imaging using
alternating current scanning electrochemical microscopy, Electrochemistry

Referencias
Página 73
Communications 9 ,2007, 2617–2621,
[16] H. Shiku, R.C. Dunn. Near-field scanning optical microscopy . Anal Chem , 1999,
71: 23A-29A.
[17] A. J. Bard, F.R. Fan; J. Kwak, O. Lev. Scanning electrochemical microscopy.
Introduction and principles, Anal. Chem. 1989, 61, 132 - 138.
[18] Y. Shao, M. V. Mirkin, G. Fish, S. Kokotov, D. Palanker, A. Lewis, Nanometer-
Sized Electrochemical Sensors ,Anal. Chem. 1997, 69:1627.
[19] DO Wipf Colloids Surfaces A Physicochem Eng Aspects 1994, 93:251,
[20] MICROELECTRODES, Martin Fleischmann, Debra R. Rolinson, Data Tech
Systems Inc.,U.S.
[21] A.J. Bard, F.R. Fan, M.V. Mirkin, in Electroanalytical Chemistry, Vol. 18 (A.J. Bard,
ed. Marcel Drekker, New York, 1994, p. 243).
[22] Electrochemical Methods, Fundamentals and Applications, pag. 671, Second
edition, Allen J. Bard, Larry R. Faulkner, John Wiley & Sons Inc.
[23] Saito, Y. Rev. of Pol. (Japan) 1968, 15, 178-186.
[24] M. Alpuche, Development Of Multi-Dimensional Methods For Scanning
Electrochemical Microscopy (SECM), Ph.D. Dissertation, Faculty of Mississippi
State University, Department of Chemistry, May 2005
[25] J Wang, L-H Wu, R. Li, Scanning electrochemical microscopic monitoring of
biological processes. J Electroanal Chem 272:285-292, 1989
[26] C.W. Lin, F.R. Fan, A.J. Bard, High Resolution Photoelectrochemical Etching of n-
GaAs with the Scanning Electrochemical and Tunneling Microscope, J
Electrochem Soc 1987,134:1038.
[27] D.H. Craston , C.W. Lin, A.J. Bard, High Resolution Deposition of Silver in Nafion
Films with the Scanning Tunneling Microscope, J Electrochem Soc , 1988,
135:785.
[28] O.E. Hüsser, D.H. Craston, A.J. Bard, High-resolution deposition and etching of
metals with a scanning electrochemical microscope, Vacuum Science and
Technology B , 1988 , 6:1873
[29] O.E. Hüsser, D.H. Craston, A.J. Bard, Scanning Electrochemical Microscopy, High-
Resolution Deposition and Etching of Metals, J Electrochem Soc, 1989,136:3222,
[30] Y-M Wuu, F-R Fan, A.J. Bard., High Resolution Deposition of Polyaniline on Pt with
the Scanning Electrochemical Microscope ,J Electrochem Soc , 1989, 136:885.

Referencias
Página 74
[31] C. Kranz , M. Ludwig , H.E. Gaub, W. Schuhmann Adv Mater, 1995, 7:38,
[32] H. Sugimura, T. Uchida , N. Shimo , N. Kitamura , H. Masuhara . Ultramicroscopy ,
1992, 42-44:468
[33] G. Wittstock , R. Hesse , W. Schuhmann , Patterned Self-Assembled
Alkanethiolate Monolayers on Gold. Patterning and Imaging by Means of Scanning
Electrochemical Microscopy, Electroanalysis 1997, 9:746
[34] A. Erich, D. Mandler Local Deposition of Gold on Silicon by the Scanning
Electrochemical Microscope J Electrochem Soc , 2001, 148 C533-C539
[35] I. Turyan, M. Etienne, D. Mandler, W. Schuhmannb , Improved Resolution of Local
Metal Deposition by Means of Constant Distance Mode Scanning Electrochemical
Microscopy , Electroanalysis, , 2005, 17, No. 5 – 6, pp 538-541
[36] J.W. Still, D.O. Wipf, Breakdown of the Iron Passive Layer by Use of the Scanning
Electrochemical Microscope, J Electrochem Soc , 1997, 144:2657
[37] D. Mandler, A.J. Bard , High Resolution Etching of Semiconductors by the
Feedback Mode of the Scanning Electrochemical Microscope, J Electrochem Soc ,
1990, 137:2468
[38] D. Mandler , A.J. Bard Hole injection and etching studies of gallium arsenide using
the scanning electrochemical microscope Langmuir , 1990, 6:1489
[39] I. Shohat , D. Mandler. Deposition of Nickel Hydroxide Structures Using the
Scanning Electrochemical Microscope, J Electrochem Soc, 1994,141:995,
[40] K. Borgwarth , C. Ricken , Heinze, D. G. Ebling, Fresenius J Anal Chem 356 : 288–
294, Springer-Verlag(1996)
[41] H. Shiku , T. Takeda , H. Yamada , T. Matsue , I. Uchida , Dual immunoassay of
human chorionic gonadotropin and human placental lactogen at a miocrofabricated
substrate by scanning electrochemical microscopy, Anal Chem , 1995, 67:312.
[42] H. Shiku , Y. Hara, T. Takeda, T. Matsue, I. Uchida , Microfabrication of
Alkylsilanized Glass Substrate by Electrogenerated Hydroxyl Radical Using
Scanning Electrochemical Microscopy ACS Synp Ser 656, Solid-Liquid
Electrochem Interfaces. 1997.
[43] P.R. Unwin and A.J. Bard, Ultramicroelectrode voltammetry in a drop of solution: a
new approach to the measurement of adsorption isotherms at the solid-liquid
interface, Anal. Chem. , 1992, 64:113.
[44] B.R. Horrocks, M.V. Mirkin, D.T. Pierce, A.J. Bard, G. Nagy, K. Toth, Scanning
Referencias
Página 75
electrochemical microscopy. 19. Ion-selective potentiometric microscopy, Anal
Chem , 1993, 65:1213.
[45] Padmaraja Yedamale, Brushless DC (BLDC) Motor Fundamentals, AN885,
Microchip Technology Inc.
[46] Martin Staebler, TMS320F240 DSP-Solution for High-Resolution Position with Sin/Cos-Encoders, Texas Instruments, Application Report SPRA496
[47] John Massa, Pulse Width Modulation (PWM) Tutorial, Datadog Systems, 2005
[48] Rahman Jamal, Herbert Pichlik, LabVIEW Applications and Solutions, Prentice Hall
PTR
[49] http://www.galilmc.com
[50] C.B. Sawyer, C.H. Tower, Rochelle Salt as a Dielectric , Phys. Rev. 35,269(1935)
[51] G. Ornelas-Arciniega, J. Reyes-Gómez, A. G. Castellanos-Guzmán, A New
Modifcation to the Sawyer-Tower Ferroelectric Hysteresis Loop Tracer, Journal of
the Korean Physical Society, 32(1998), p380-381
[52] B. Andò, P. Giannone, S. Graziani, IEEE Transactions on Instrumentation and
Measurement, 55-6(2006) p 1996-2005.
[53] J. K. Sinha, Modified Sawyer and Tower circuit for the investigation of ferroelectric
samples, J. Scientific Instruments, 42(1965), p 696-698
[54] J. Mastner , A quasistatic hysteresis loop tracer, J. Scientific Instruments, 1(1968),
p 1249
[55] H. Roetschi, New type of loop tracer for ferroelectrics, J. Scientific
Instruments,39(1962),p 152-153

ANEXO A SOFTWARE UTILIZADO
En este anexo se describe todo el software utilizado durante el desarrollo del sistema
de microscopía electroquímica implementado. La operación y uso general de
Windows Servo Design Kit, DMC Smart Terminal, LabView, el lenguaje de
programación propietario de Galil para controladores de movimiento y el software para
mediciones electroquímicas CPCKPC es explicado. Son también expuestos los
algoritmos, la programación y los procedimientos utilizados para hacer la entonación
de los motores del posicionador Fibermax de Aerotech Inc..
A.1 Software Utilizado Una diversidad de software fue utilizado para la puesta a punto y operación optima del
SECM, a continuación se detalla la operación general de los diferentes programas
utilizados durante el desarrollo del microscopio electroquímico.
A.1.1 Windows Servo Design Kit Para realizar la entonación de los motores y obtener los parámetros óptimos PID del
controlador para cada motor se utilizó el Software Windows Servo Design Kit (WSDK)
de la compañía Galil. La interfaz principal de este software se muestra en la figura A.1.
Fig. A.1 Interfaz del programa Windows Servo Design Kit

A pesar de que el software tiene una sección de entonación automática con diferentes
algoritmos (ver figura 3.1 botón Tuning Methods) no se utilizó puesto que no mostró
funcionalidad para sistemas de alta resolución sen/cos . La entonación se llevó a cabo
manualmente utilizando como apoyo la sección Storage Scopes, ahí se programaron
rutinas con diferentes valor de PID y se revisó gráficamente el comportamiento del
sistema, se encontraron entonces los parámetros idóneos de acuerdo al tipo de
movimiento deseado en cada uno de los motores.
Otra sección del software que se utilizó fue el Motion Profile Builder, en esta sección
se genera el perfil de velocidad para un conjunto de parámetros dados de distancia,
velocidad, aceleración y desaceleración, el mismo software calcula el tiempo que
durará el recorrido del motor con ese perfil de velocidad. En esta sección se utilizó la
opción Encoder Counts y los parámetros se proporcionaron en unidades de cuentas
del encoder, cuentas/seg y cuentas/seg2 . la figura A.2 muestra las interfaces del
software que aparecen antes de generar el perfil de velocidad.
Fig. A.2 Secuencia de interfaces para obtener un perfil de velocidad de un movimiento a través del Motion
Profile Builder
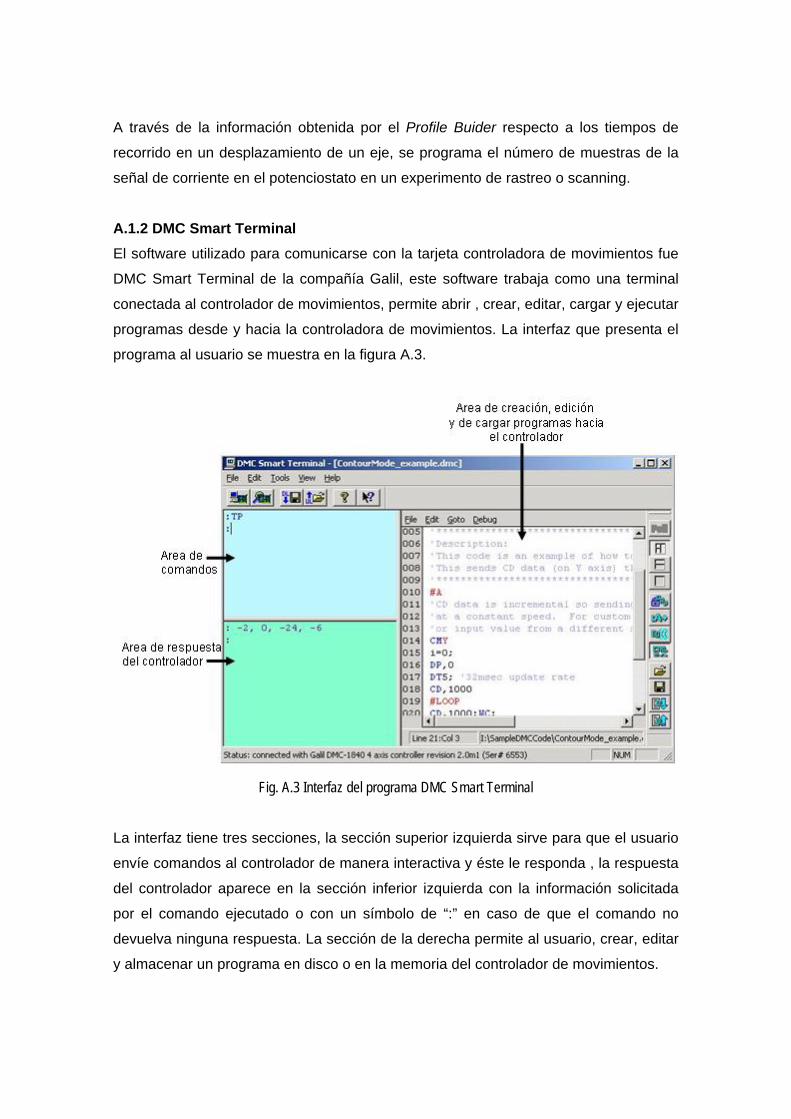
A través de la información obtenida por el Profile Buider respecto a los tiempos de
recorrido en un desplazamiento de un eje, se programa el número de muestras de la
señal de corriente en el potenciostato en un experimento de rastreo o scanning.
A.1.2 DMC Smart Terminal El software utilizado para comunicarse con la tarjeta controladora de movimientos fue
DMC Smart Terminal de la compañía Galil, este software trabaja como una terminal
conectada al controlador de movimientos, permite abrir , crear, editar, cargar y ejecutar
programas desde y hacia la controladora de movimientos. La interfaz que presenta el
programa al usuario se muestra en la figura A.3.
Fig. A.3 Interfaz del programa DMC Smart Terminal
La interfaz tiene tres secciones, la sección superior izquierda sirve para que el usuario
envíe comandos al controlador de manera interactiva y éste le responda , la respuesta
del controlador aparece en la sección inferior izquierda con la información solicitada
por el comando ejecutado o con un símbolo de “:” en caso de que el comando no
devuelva ninguna respuesta. La sección de la derecha permite al usuario, crear, editar
y almacenar un programa en disco o en la memoria del controlador de movimientos.

A través de los menús del software DMC Smart Terminal se puede también realizar
tareas más especializadas como reinicializar el controlador de movimiento, actualizar
su firmware y obtener el diagnostico de la operación del controlador entre otras cosas.
A.1.3 Entonación de los motores Utilizando el DMC Smart Terminal y el WSDK se entonaron cada uno de los motores
del posicionador para los diversos tipos de desplazamientos que se realizan en la
diferentes tareas a realizar en el microscopio electroquímico.
El algoritmo seguido para entonar los motores a través los parámetros PID (ganancia
proporcional, ganancia integradora y ganancia derivativa) del filtro del controlador de
movimiento fue el sugerido por Galil, y se describe en la siguiente sección.
3.3.1 Algoritmo de entonación de motores
Considerando que n puede ser cualquier eje (X, Y ó Z) el procedimiento para entonar
cada motor del posicionador es el siguiente:
a) Se fila la ganancia del parámetro integrador a 0
KIn = 0
b)Se fija la ganancia proporcional a una ganancia baja (por ejemplo 1)
KPn = 1
c)Se fija la ganancia derivativa a un valor alto(por ejemplo 100)
KDn = 100
d)Se prueba el motor con un desplazamiento típico a la velocidad, aceleración y
desaceleración deseada(comandos SP, AC y DC). Si se escucha una vibración en el
motor hay que reducir el parámetro derivativo KD, si no es así hay que aumentarlo lo
más posible sin que exista dicha vibración. Otra manera de saber si el motor tiene una
vibración que no produce sonido audible o es de magnitud pequeña es utilizar el
comando TE (Tell Error) continuamente , si el comando da respuestas alternadas en
signo significa que existe una pequeña vibración y hay que bajar el valor del parámetro
KD.
e)Una vez establecido el parámetro KD se empieza a aumentar el parámetro
proporcional KP , al ir aumentando puede verificarse su correcta operación a través del
comando TE, el error deberá disminuir al aumentar KD , sin embargo si la ganancia
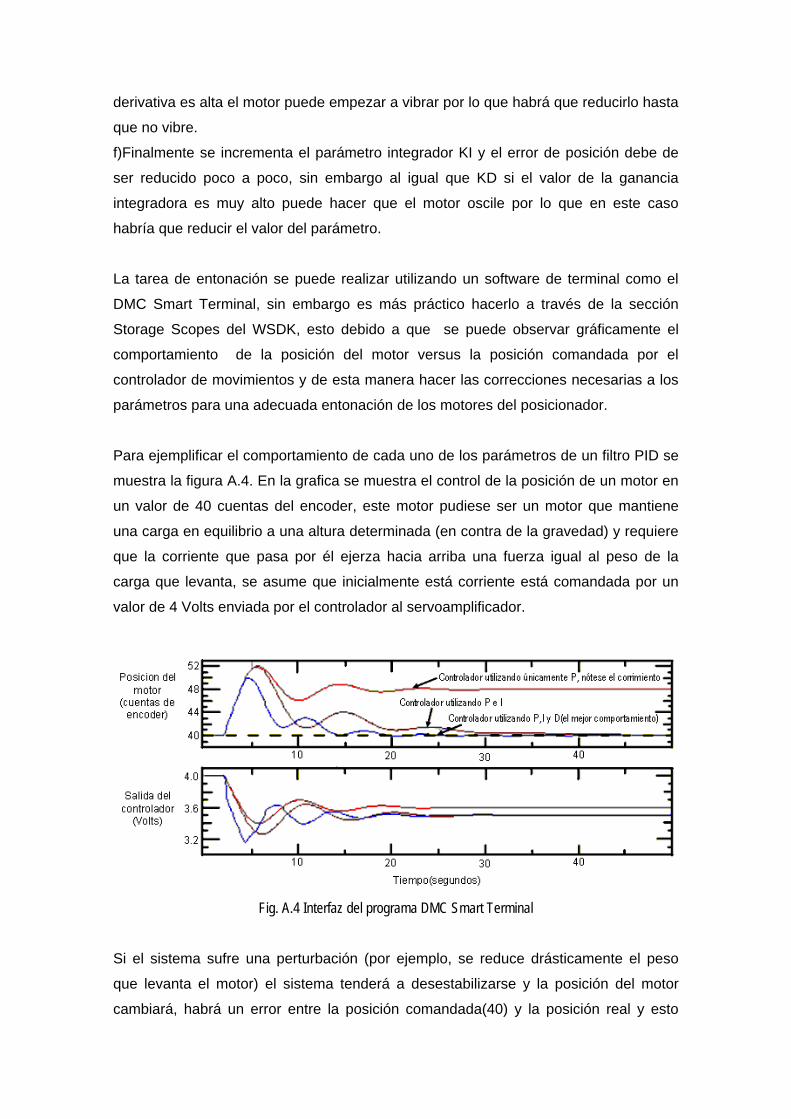
derivativa es alta el motor puede empezar a vibrar por lo que habrá que reducirlo hasta
que no vibre.
f)Finalmente se incrementa el parámetro integrador KI y el error de posición debe de
ser reducido poco a poco, sin embargo al igual que KD si el valor de la ganancia
integradora es muy alto puede hacer que el motor oscile por lo que en este caso
habría que reducir el valor del parámetro.
La tarea de entonación se puede realizar utilizando un software de terminal como el
DMC Smart Terminal, sin embargo es más práctico hacerlo a través de la sección
Storage Scopes del WSDK, esto debido a que se puede observar gráficamente el
comportamiento de la posición del motor versus la posición comandada por el
controlador de movimientos y de esta manera hacer las correcciones necesarias a los
parámetros para una adecuada entonación de los motores del posicionador.
Para ejemplificar el comportamiento de cada uno de los parámetros de un filtro PID se
muestra la figura A.4. En la grafica se muestra el control de la posición de un motor en
un valor de 40 cuentas del encoder, este motor pudiese ser un motor que mantiene
una carga en equilibrio a una altura determinada (en contra de la gravedad) y requiere
que la corriente que pasa por él ejerza hacia arriba una fuerza igual al peso de la
carga que levanta, se asume que inicialmente está corriente está comandada por un
valor de 4 Volts enviada por el controlador al servoamplificador.
Fig. A.4 Interfaz del programa DMC Smart Terminal
Si el sistema sufre una perturbación (por ejemplo, se reduce drásticamente el peso
que levanta el motor) el sistema tenderá a desestabilizarse y la posición del motor
cambiará, habrá un error entre la posición comandada(40) y la posición real y esto
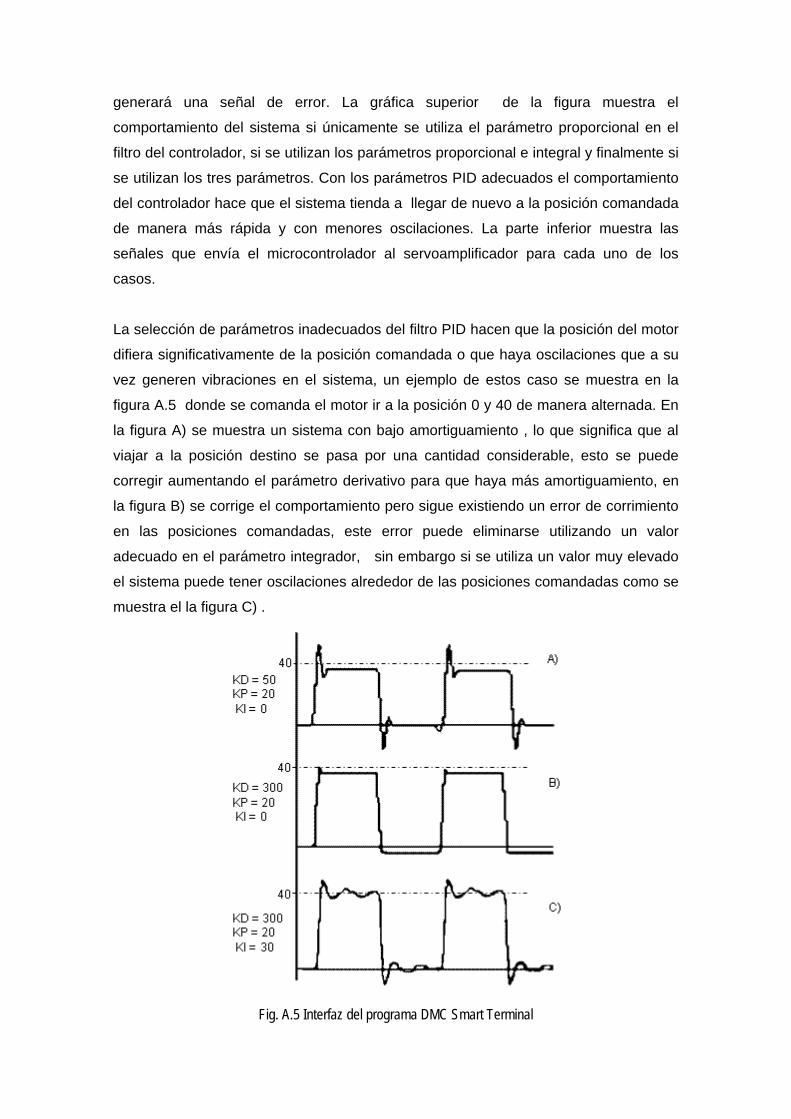
generará una señal de error. La gráfica superior de la figura muestra el
comportamiento del sistema si únicamente se utiliza el parámetro proporcional en el
filtro del controlador, si se utilizan los parámetros proporcional e integral y finalmente si
se utilizan los tres parámetros. Con los parámetros PID adecuados el comportamiento
del controlador hace que el sistema tienda a llegar de nuevo a la posición comandada
de manera más rápida y con menores oscilaciones. La parte inferior muestra las
señales que envía el microcontrolador al servoamplificador para cada uno de los
casos.
La selección de parámetros inadecuados del filtro PID hacen que la posición del motor
difiera significativamente de la posición comandada o que haya oscilaciones que a su
vez generen vibraciones en el sistema, un ejemplo de estos caso se muestra en la
figura A.5 donde se comanda el motor ir a la posición 0 y 40 de manera alternada. En
la figura A) se muestra un sistema con bajo amortiguamiento , lo que significa que al
viajar a la posición destino se pasa por una cantidad considerable, esto se puede
corregir aumentando el parámetro derivativo para que haya más amortiguamiento, en
la figura B) se corrige el comportamiento pero sigue existiendo un error de corrimiento
en las posiciones comandadas, este error puede eliminarse utilizando un valor
adecuado en el parámetro integrador, sin embargo si se utiliza un valor muy elevado
el sistema puede tener oscilaciones alrededor de las posiciones comandadas como se
muestra el la figura C) .
Fig. A.5 Interfaz del programa DMC Smart Terminal
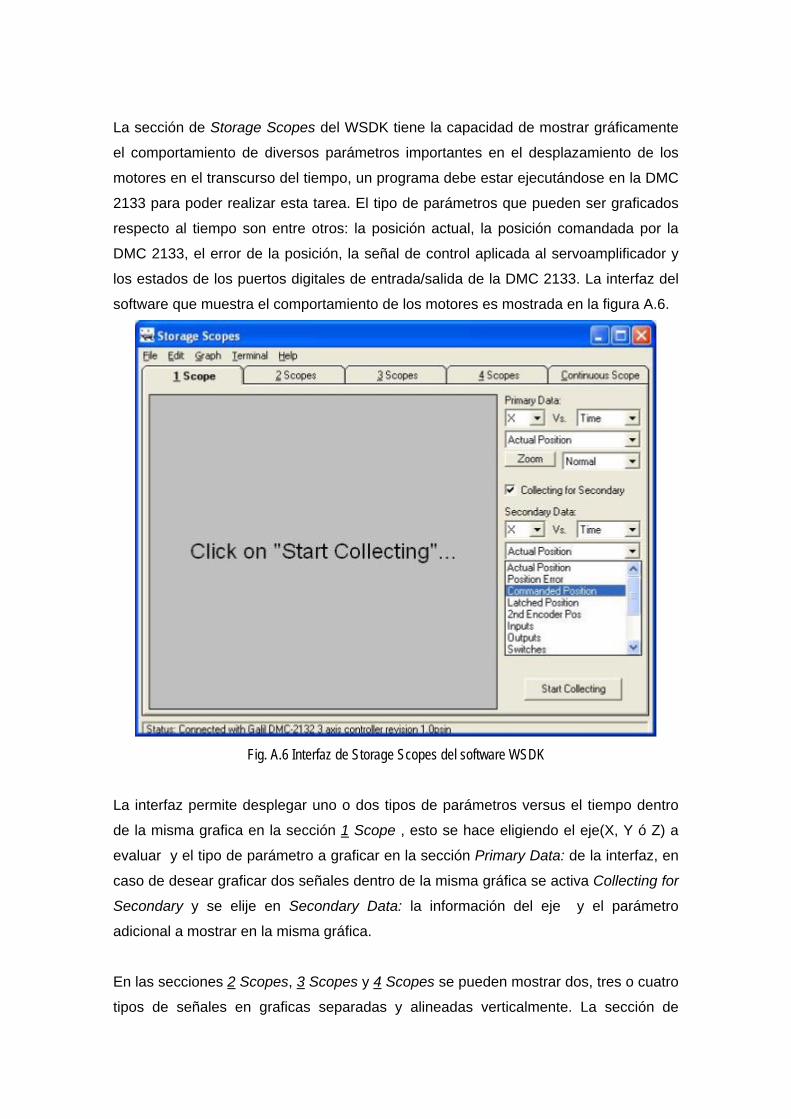
La sección de Storage Scopes del WSDK tiene la capacidad de mostrar gráficamente
el comportamiento de diversos parámetros importantes en el desplazamiento de los
motores en el transcurso del tiempo, un programa debe estar ejecutándose en la DMC
2133 para poder realizar esta tarea. El tipo de parámetros que pueden ser graficados
respecto al tiempo son entre otros: la posición actual, la posición comandada por la
DMC 2133, el error de la posición, la señal de control aplicada al servoamplificador y
los estados de los puertos digitales de entrada/salida de la DMC 2133. La interfaz del
software que muestra el comportamiento de los motores es mostrada en la figura A.6.
Fig. A.6 Interfaz de Storage Scopes del software WSDK
La interfaz permite desplegar uno o dos tipos de parámetros versus el tiempo dentro
de la misma grafica en la sección 1 Scope , esto se hace eligiendo el eje(X, Y ó Z) a
evaluar y el tipo de parámetro a graficar en la sección Primary Data: de la interfaz, en
caso de desear graficar dos señales dentro de la misma gráfica se activa Collecting for
Secondary y se elije en Secondary Data: la información del eje y el parámetro
adicional a mostrar en la misma gráfica.
En las secciones 2 Scopes, 3 Scopes y 4 Scopes se pueden mostrar dos, tres o cuatro
tipos de señales en graficas separadas y alineadas verticalmente. La sección de

Continuous Scope permite la visualización casi en tiempo real de un tipo de
información de los disponibles.
La grafica desplegada esta limitada a 8000 puntos, cada punto es el resultado de un
muestreo y el periodo de las muestras pueden ser configuradas en el rango de 2ms -
256ms. Si hay mas de una señal graficada las 8000 muestras disponibles se
distribuyen entre todas las señales mostradas. La interfaz para la configuración de los
parámetros de graficación se muestra en la figura A.7.
Fig. A.7 parámetros de graficación de Storage Scopes
La técnica utilizada para la entonación de los motores del posicionador fue la
programación de movimientos típicos en ambos sentidos de cada motor, los
parámetros PID fueron entonces modificados de acuerdo al algoritmo mencionado
previamente y a las observaciones hechas en las graficas generadas por Storage
Scopes . La figura A.8 muestra una entonación adecuada del eje Z del posicionador
para movimientos de 2000 cuentas del encoder( desplazamiento aproximado de 18
micras), nótese que la posición actual del motor es prácticamente igual a la posición
comanda por el controlador de movimiento durante todo el trayecto.

Fig. A.8 Gráfica de la posición comandada y actual del motor que controla el eje Z del posicionador
El programa ejecutándose en el DMC 2133 que corresponde a la programación de
estos movimientos se lista a continuación. #MANUAL3 AFZ=10; Se define la resolución del encoder a 10 bits KDZ=15; Se programan los parámetros PID KPZ=2.5; KIZ=1.5; DPZ=0; Se define la posición actual del motor como cero SHZ; Se prende el motor SPZ=2000; Se programan la velocidad, aceleración y ACZ=4000; desaceleración del motor DCZ=4000; PRZ=-2000;Se programan 3 movimientos de 2000 cuentas del BGZ; encoder hacia abajo AMZ; WT700; PRZ=-2000; BGZ; AMZ; WT700; PRZ=-2000;

BGZ; AMZ; WT700; PRZ=2000; Se programan 3 movimientos de 2000 cuentas del BGZ; encoder hacia arriba AMZ; WT700; PRZ=2000; BGZ; AMZ; WT700; PRZ=2000; BGZ; AMZ; WT700; EN; Fin del programa
A.1.4 LabView LabView es un lenguaje de programación gráfico para computadores personales cuyo
propósito fundamental es desarrollar programas de instrumentación virtual, al ser
programación gráfica no hay código escrito como lo existe en la mayoría de los
lenguajes por lo que únicamente se pueden presentar estructuras de programación de
manera gráfica. Una de las mayores ventajas de LabView respecto a el resto de los
lenguajes es que facilita al usuario la comunicación con tarjetas conectadas a la PC y
en general a cualquiera de los puertos de la computadora donde se ejecuta.

Fig. A.9 Panel frontal(superior) y diagrama de bloques(inferior) de un programa en LabView
Cuando se desarrolla un programa en LabView existen dos zonas de trabajo, la zona
del panel frontal donde se colocan los controles que tendrá la interfaz del programa y
el diagrama de bloques que es donde se efectúa toda la programación “alambrando”
los diferentes componentes y estructuras de un programa. La figura A.9 muestra un
panel frontal conteniendo controles de un osciloscopio virtual, en la parte inferior de la
figura se muestra el alambrado correspondiente en el diagrama de bloques de dicha
aplicación.
A.1.4.1 Panel Frontal Para colocar controles en el panel frontal se utiliza la barra de controles mostrada en la
figura A.10, esta paleta de accede a controles agrupados por tipo dentro de otras

paletas. Existe una diversidad de controles, indicadores, graficas u objetos útiles
dentro de varias paletas, hay indicadores/controles de tipo numérico, booleano, string,
además de formas predefinidas para colocar graficas, información de tablas, listas,
arreglos, etc.. A cada componente(control/interruptor/indicador/grafica/etc.) ubicado en
el panel frontal le corresponde un bloque dentro del diagrama de bloques, de esta
forma se asocia la interacción que ocurre en el panel frontal con la lógica de
programación desarrollada en el diagrama de bloques
Fig. A.10 Diferentes paletas de controles/indicadores que pueden ser colocados en el panel frontal
A.1.4.2 Diagrama de bloques Las estructuras de programación más comunes con las que se trabaja en el diagrama
de bloques en LabView son mostradas en la paleta de estructuras mostrada en la
figura A.11.

Fig. A.11 Paleta de estructuras en LabView
Los símbolos marcados con 1 y 2 sirven para agrupar “código” grafico que será
ejecutado de manera secuencial, es decir uno después de otro, el símbolo 3
representa una estructura Case (análogo a una instrucción switch de C, C++ ó Java),
la figura 4 y 5 representan ciclos While y For, la 6 permite crear subrutinas con código
de programación en texto similar a C, la 7 permite realizar programación gráfica
basada en eventos que suceden en los controles del panel frontal y las figuras 8 y 9
permiten definir variables locales y globales en el entorno de programación.
Dentro de la mayoría de las estructuras pueden colocarse otras estructuras y código
de programación gráfico como se hace comúnmente en cualquier lenguaje de
programación. En la figura A.12 se muestran un grupo de paletas con diferentes tipo
de bloques que pueden ser usados en la programación de una tarea dentro de
LabView

Fig. A.12 Diversas paletas de bloques gráficos en LabView : a) Paleta de operaciones numéricas b) Paleta para manipulación booleana c) Paleta para manejo de strings d)Paleta para manipulación de
arreglos e) Paleta para comparación e) Paleta de control de puestos en DAQ´s
Los diferentes componentes de programación se alambran apropiadamente con el fin
de programar alguna tarea y finalmente se crea un programa en donde el flujo de
información fluye a través de los alambres realizando la tarea deseada.
A.1.5 Lenguaje Galil para controladores de movimiento El lenguaje de programación de Galil consta básicamente de comandos de 2 letras
seguidas por argumentos que indican el motor o motores a los cuales se aplica el
comando y/o los argumentos del comando. Los comandos son abreviaturas en inglés
del mandato que realizara la instrucción, las siguientes líneas muestran una lista de
comandos comunes y su significado
DP Define la Posición actual de el/los motor(es) con un valor dado al comando
PA Define la posición Absoluta a la que va a ir el/los motor(es)
PR Define la Posición Relativa ( respecto a la posición actual) a la que va a ir
el/los motor(es)
SP Define la velocidad(SPeed) de movimiento de el/los motor(es)
AC Define la ACeleración de el/los motor(es) en la parte inicial de un movimiento
DC Define la DeCaceleración de el/los motor(es) en la parte final un movimiento
KP Define la constante(K) ó parámetro Proporcional de el/los filtro(s) del
controlador
KI Define la constante(K) ó parámetro Integrador de el/los filtro(s) del
controlador
KD Define la constante(K) ó parámetro Derivativo de el/los filtro(s) del controlador
BG Empieza(BEgin) un movimiento programado
WT Detiene (WaiT) la ejecución del programa cierta cantidad de milisegundos
Un ejemplo sencillo de este tipo de programas ejecutándose en un controlador de
movimiento es el siguiente:
#INICIO Etiqueta del Inicio de un Programa PR 2000,500,100 Especifica movimientos relativos de 2000, 500 y 100 cuentas del encoder para los motores X, Y y Z. SP 15000,10000,5000 Especifica velocidades de 10000, 15000, y 5000 cuentas/sec. para los motores X, Y y Z. AC 500000,500000,500000 Especifica una aceleración de 500000 cuentas/sec2 para los Motores X, Y y Z DC 500000,500000,500000 Especifica una desaceleración de 500000 cuentas/sec2 para los Motores X, Y y Z BG X Empieza el movimiento del motor X WT 20 Se espera 20 milisegundos BG Y Empieza el movimiento del motor Y WT 20 Se espera 20 milisegundos BG Z Empieza el movimiento del motor Y
EN Fin del programa
El perfil de velocidad de cada uno de los motores versus el tiempo para la secuencia
de movimientos programados se muestra en la A.13. Al finalizar el movimiento de cada
motor éstos debieron de haberse desplazado exactamente 2000, 500 y 100 cuentas
del encoder respectivamente respecto a la posición en que se encontraban antes de
ejecutar el programa. Cabe hacer notar que los parámetros del filtro PID del
controlador para cada eje debieron de haber sido obtenidos y alimentados al
controlador antes de ejecutar este programa, o bien – lo cual es más común- se deben
de integrar los valores de estos parámetros dentro del mismo programa. Esto se hace
a través de los comandos:
KPn = valor (n = X, Y ó Z)
KIn = valor (n = X, Y ó Z)
KDn = valor (n = X, Y ó Z)

Fig. A.13 Perfil de velocidad de 3 ejes correspondiente al código XX
A.1.5.1 Modos de Movimiento La gran ventaja de utilizar un controlador de movimiento es el hecho de que puede
operar en diversos modos de acuerdo a la tarea que se desea realizar. Algunos de los
modos más comunes en que opera el DMC 3122 junto con sus comandos asociados
se listan tabla A.1.
Tabla A.1 Modos de operación de la DMC 2133
Modo de Movimiento Ejemplo de Aplicación Comandos asociados al modo Posicionamiento Independiente de eje
Posición absoluta o relativa donde el movimiento de cada eje es independiente de los otros
PA,PR,SP,AC,DC
Jogging Independiente Movimiento a velocidad constante hasta recibir un comando de Stop
JG,AC,DC,ST
Position Tracking Modo de posicionamiento absoluto donde nuevos destinos pueden ser enviados al controlador mientras está ejecutando un movimiento
PA,PT,SP,AC, DC
Modo Contour El modo permite generar una curva arbitraria en el espacio coordinando el movimiento de 1 a 8 ejes. Es ideal para trazos generados por computadora como superficies parabólicas, esféricas o perfiles definidos por el usuario.
CM,CD,DT,WC
Interpolación Lineal Movimiento coordinado de 2-8 ejes donde la trayectoria es descrito por segmentos lineales.
LM,LI,LEVS,VR,VA,VD
Movimiento Coordinado Movimiento coordinado en 2-D consistiendo de segmentos de líneas arcos.
VM,VP,CR,VS,VR,VA,VD,VE
Modo Contour con automática Captura en arreglo
Enseñar y/o almacenar una trayectoria y reproducirla.
CM,CD,DT,WC,RA,RD,RC

Un listado de los comandos que pueden ser ejecutados por del DMC separados por función se muestra en la tabla A.2.
Tabla A.2 Comandos de la DMC 2133 agrupados por función

A.1.6 CPCKPC El programa CPCKPC de Bank Elektronik es un software que permite realizar
mediciones en celdas electroquímicas, específicamente mediciones y control de
potenciales y corrientes en el transcurso del tiempo en que se desarrolla un
experimento. Técnicas electroquímicas como cronoamperometría, voltametría cíclica,
cronopotenciometría y curvas I-V pueden ser evaluadas a través de este software.
El software fue utilizado para obtener voltamogramas en estado estable de nuestras
celdas y determinar el rango de potenciales donde ocurre la transición de un proceso
catódico a uno anódico, esto nos permite definir un potencial adecuado para realizar
experimentación de microscopía electroquímica. El software es muy completo para
evaluar el comportamiento de celdas electroquímicas sin embargo en esta sección
sólo se explica la parte utilizada en nuestra experimentación.
La figura A.14 muestra la interfaz principal del programa junto con la ventana de
control remoto del potenciostato, ambas ventanas aparecen al ejecutar el programa
CPCKPC.
Fig. A.14 Interfaz principal del software CPCKPC y ventana de control del potenciostato

La ventana de control remoto del potenciostato permite al usuario confirmar la
interacción adecuada del software con el equipo , configura de manera remota el
potencial aplicado a la celda, el rango de corriente utilizado , el modo de
operación(potenciostato/galvanostato) y la activación/desactivación del electrodo
auxiliar, estas configuraciones modifican los leds e indicadores de la parte frontal del
potenciostato.
La figura A.15 muestra la siguiente interfaz que presenta el software , esta sección
permite configurar los datos de la experimentación a realizar, información como el
material utilizado, el electrolito, el pH de la solución ,el tipo de electrodo de referencia,
el área del electrodo de trabajo, la temperatura y otros parámetros mas del
experimento son llenados en los campos de esta interfaz. Al almacenar los resultados
de un experimento estos datos encabezan dicha información.
Fig. A.15 Interfaz de configuración del experimento del software CPCKPC
El ingreso para configurar un experimento de voltaamperometría es a través del botón
SLOW MEAS, la interfaz que se presenta al oprimir dicho botón se muestra en la
figura A.16. Para correr un voltamperograma se debe de elegir dentro de la sección de
InputMode Slope & E se configura entonces el potencial de inicio, el potencial final y la
pendiente en los campos Initial E, Final E y Slope de la interfaz, una vez hecho esto se
selecciona la opción de Ramp para Voltametría lineal o bien Triangle para voltametría
lineal cíclica.

Fig. 4.16 Interfaz para realizar experimentación de técnicas electroquímicas del software CPCKPC
La gráfica de potencial y la corriente (en escala logarítmica) dentro de la celda se va
mostrando en el transcurso del experimento dentro de área inferior izquierda de la
interfaz. Los datos de esta gráfica se pueden almacenar en una archivo para posterior
análisis.

ANEXO B ALGORITMOS DEL SOFTWARE DESARROLLADO
B.1 Algoritmos del Software ejecutándose en la PC Como se había mencionado en el capítulo de software , la mayor parte del software
desarrollado en LabView está basado en la filosofía basada en eventos, esto significa
que el programa está esperando por un evento que suceda en la interfaz con el fin de
realizar una tarea. La figura B.1 muestra a través de un diagrama de bloques de
LabView la filosofía de operación del software desarrollado.
Fig. B.1 Estrategia general en código de LabView de la operación general del software en la PC
La estructura cíclica mostrada en la figura B.1 permite al programa monitorear
continuamente los eventos que suceden en la interfaz, la estructura de eventos
permite codificar a través de programación gráfica la tarea que se debe de realizar
cuando sucede un evento, el retardo permite liberar un poco la carga del procesador
con el fin de que no dedique todo su tiempo a la “escucha” de eventos y pueda atender
otros procesos.
En las siguientes secciones se explica de manera general la programación hecha
dentro del diagrama de bloques en LabView para los eventos más importantes que
suceden en la interfaz del usuario

B.1.1 Eventos en el slide de la interfaz común y botón EXECUTE Cuando el usuario desplaza el slide que define la velocidad de movimiento del eje Z,
se genera un evento que produce que el software envíe a la DMC 2133 un comando
que modifica el valor de la variable VAR1 dentro del programa ejecutándose en la
controladora de movimiento. Cuando se oprime el botón EXECUTE se activa el puerto
digital P1.4 de la tarjeta de adquisición de datos PCI-6229, esto produce una
interrupción para que se ejecute la rutina correspondiente en la DMC 2133.
Fig. B.2 Eventos en el slide de la interfaz común y botón EXECUTE
La figura B.2 muestra gráficamente los eventos que suceden en esta parte de la
interfaz y las labores realizadas en el código gráfico de LabView.
B.1.2 Evento en el Interruptor Lectura de Posición Cuando el interruptor de lectura de posición es activado se genera un evento que
produce la ejecución de un código que consulta continuamente a la DMC 2133 por la
posición del encoder del eje Z, el resultado de esta consulta es entonces enviado al
indicador Posición Z de la interfaz del usuario. Cuando el interruptor es desactivado se
deja de consultar la posición del encoder y se congela el indicador.

Fig. B.3 Eventos en el slide de la interfaz común y botón EXECUTE
La figura B.3 muestra gráficamente los eventos que suceden en esta parte de la
interfaz y las labores realizadas en el código gráfico de LabView.
B.1.3 Eventos en los botones Bajar y Subir Automáticamente Cuando el usuario oprime el botón Subir Automáticamente o Bajar Automáticamente
se envía a la tarjeta controladora de movimientos la instrucción VAR1=6 ó VAR1=7,
después de un pequeño retardo se envía activar el puerto digital P1.4 de la PCI 6229
con el fin de generar una interrupción en la DMC 2133, en ésta se ejecuta entonces la
rutina cíclica que moverá el eje Z hacia arriba o abajo, alejando o acercando el UME
de la superficie a estudiar.
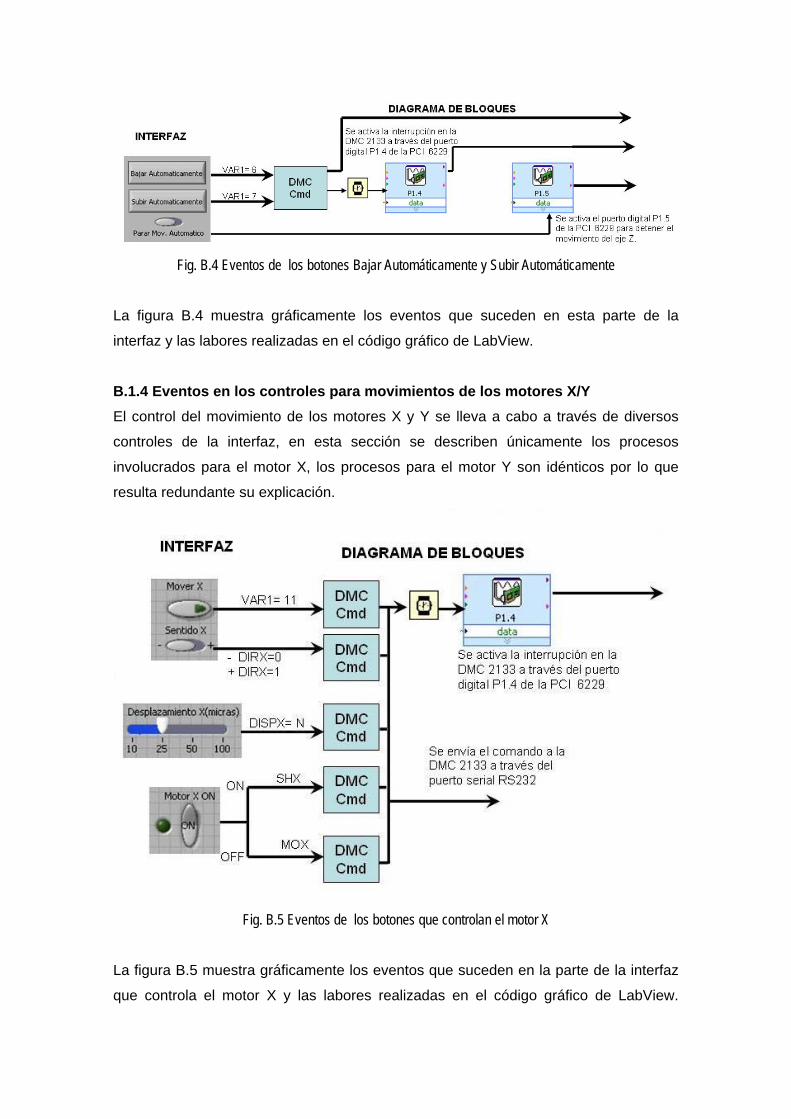
Fig. B.4 Eventos de los botones Bajar Automáticamente y Subir Automáticamente
La figura B.4 muestra gráficamente los eventos que suceden en esta parte de la
interfaz y las labores realizadas en el código gráfico de LabView.
B.1.4 Eventos en los controles para movimientos de los motores X/Y
El control del movimiento de los motores X y Y se lleva a cabo a través de diversos
controles de la interfaz, en esta sección se describen únicamente los procesos
involucrados para el motor X, los procesos para el motor Y son idénticos por lo que
resulta redundante su explicación.
Fig. B.5 Eventos de los botones que controlan el motor X
La figura B.5 muestra gráficamente los eventos que suceden en la parte de la interfaz
que controla el motor X y las labores realizadas en el código gráfico de LabView.
Cuando se oprime el motor Mover X se genera el comando “VAR1=11” el cual es
enviado a la DMC 2133, después de esto el programa de LabView espera un corto
retardo con el fin de asegurarse que la controladora de movimiento ejecutó la
instrucción enviada, se procede entonces a activar el puerto digital P1.4 de la PCI-
6229 para generar la interrupción que será atendida en la DMC 2133.
Cuando se modifica la posición del interruptor Sentido X se envía un comando como
“DIRX=0” ó “DIRX=1” dependiendo de la nueva posición del interruptor, esto modifica
la variable DIRX internamente dentro del programa ejecutándose en la DMC 2133,
esta variable es utilizada en la rutina que mueve el eje X pues de acuerdo a su valor el
desplazamiento de dicho eje es en un sentido o en el otro. Cuando se modifica la posición del slide Desplazamiento X se envía un comando
como “DISPX=N” donde N puede valer 10,25,50 ó 100 dependiendo de la nueva
posición del slide, esto modifica internamente la variable DISPX dentro del programa
ejecutándose en la DMC 2133, esta variable es utilizada en la rutina que mueve el eje
X , la magnitud del desplazamiento de este eje esta dado por el nuevo valor de la
dicha variable. Cuando se modifica la posición del interruptor Motor X ON se envía un comando
como “SHX” – de Servo Here X- ó “MOX” –de Motor Off X- a la DMC 2133
.Dependiendo de la nueva posición del interruptor se enciende o se apaga la etapa de
potencia del servoamplificador , esto ultimo facilita el poder mover el eje X
manualmente para llevarlo a una posición deseada.
La interfaz y el diagrama de bloques para el motor Y es idéntica, lo que cambia son los
comandos enviados a la DMC 2133, en vez de utilizar la letra X dentro del comando
se utiliza la letra Y.
B.1.5 Evento al oprimir el botón RESET
El oprimir el botón RESET se envía el comando “RS” el cual reinicializa la tarjeta
controladora de movimiento. Una vez reinicializada se pueden cargar nuevos
programas a la DMC 21333.

Fig. B.6 Eventos cuando se oprime el botón RESET
La figura B.6 muestra gráficamente los eventos que suceden en esta parte de la
interfaz y las labores realizadas en el código gráfico de LabView.
B.1.6 Evento al mover el control de Potencial Aplicado
Cuando el usuario gira la perilla de Potencial Aplicado, se genera un evento que
produce la modificación del potencial exterior aplicado al potenciostato. Este potencial
se envía a través del puerto análogo de salida AO.0 de la NI-DAQ 6229.
Fig. B.7 Evento cuando se modifica la perilla de Potencial
La figura B.7 muestra de manera simple los eventos que suceden cuando se modifica
la posición del control de potencial.
B.1.7 Eventos al modificar los interruptores CE y Potenciostato/Galvanostato
Cuando el usuario oprime el botón CE se activa/desactiva el electrodo auxiliar del
potenciostato. Esto se realiza controlando la línea del puerto digital P0.0 de la NI-DAQ
6229, este línea está conectada directamente a la señal CE On/Off en puerto SCSI III
del potenciostato.

Cuando el usuario oprime el control del modo de operación del equipo
Potenciostato/Galvanostato se activa/desactiva la línea del puerto digital P0.7 de la NI-
DAQ 6229, este línea está conectada directamente a la señal Pot/Gal en el puerto
SCSI III del potenciostato.
Fig. B.8 Evento cuando se modifica el control CE y Pot/Gal
La figura B.8 muestra de manera simple los eventos que suceden cuando estos
eventos modifican los controles relacionados con el electrodo auxiliar y el modo de
operación del equipo.
B.1.8 Evento al modificar el rango de corriente del potenciostato
Al modificar el rango de corriente del potenciostato se genera un evento que ejecuta
una rutina que descifra el nuevo valor del control. Los valores internos para cada
posición de este control son de tipo numérico, este valor es decodificado en bits
individuales y enviado a través de los puertos digitales P0.1 a P0.3, estas líneas de la
NI-DAQ 6229 están conectadas con las señales Range In 0-2 en el puerto SCSI III del
potenciostato.

Fig. B.9 Evento cuando se modifica el control de rango de la corriente
Los bits individuales decodificados del control son utilizados también para desplegar
en un indicador virtual tipo led el rango seleccionado y darle así un mayor realce y
entendimiento a la interfaz. La figura B.9 muestra la interfaz y el diagrama de bloques
del proceso descrito en los párrafos previos.
B.1.9 Evento al oprimir el botón DESCARGAR
Antes de poder realizar movimientos en los ejes a través del software de la PC , se
debe de descargar el programa en la DMC 2133 y ejecutarlo, lo primero se hace a
través del botón DESCARGAR el cual genera un evento que envía el archivo digitado
en el cuadro de texto adyacente a un módulo o subVi llamado DMC DLFile para que
éste lo transfiera a la controladora de movimiento vía el puerto RS232.
Fig. B.10 Evento cuando se oprime el botón DESCARGAR
La figura B.10 muestra la interfaz y el diagrama de bloques del proceso descrito
anteriormente.
B.1.10 Evento al oprimir el botón ENVIAR

Para ejecutar el programa dentro de la controladora a partir de un línea dada se utiliza
el botón ENVIAR. Al oprimir éste se genera un evento que envía el comando escrito
dentro del cuadro de texto contiguo a la controladora de movimientos. El comando
para ejecutar un programa dentro de la controladora es XQ#etiqueta, éste inicia la
ejecución del código a partir de la etiqueta mencionada en el código cargado en la
DMC 2133.
Fig. B.11 Evento cuando se oprime el botón ENVIAR
La figura B.11 muestra la interfaz y el diagrama de bloques del proceso descrito
anteriormente.
B.1.11 Evento al modificar el control de Habilitar/Dehabilitar medición
Habilitar y deshabilitar la lectura de corriente se hace a través de un control o
interruptor booleano, cuando éste control es modificado se genera un evento que
ejecuta una rutina en LabView. La rutina revisa el valor actual del control y si es
verdadero(TRUE) se realizan mediciones de la corriente en la celda a través del puerto
análogo de entrada AI2 de la NI-DAQ 6229 , ésta señal análoga tiene un rango de +/-
2 volts y viene directamente de la salida Current Out del puerto SCSI III del
potenciostato. Si el valor del control es falso no se hace nada dentro del código y esto
libera un poco de carga al procesador.

Fig. B.12 Evento cuando se modifica el interruptor Habilitar/Deshabilitar medición
El proceso de lectura es filtrado a través de una rutina que promedia muestras a una
frecuencia múltiple de 60Hz, esto con el fin de eliminar la señal de 60Hz inducida en
las señales de voltaje muy pequeñas que provienen del potenciostato. Se despliega
entonces en el indicador Nanoamperes el promedio de varias muestras de la corriente
leída en ese momento. La figura B.12 describe gráficamente los eventos detallados
previamente.
B.1.12 Evento al oprimir el botón Generar Curva de Acercamiento Cuando se oprime el botón Generar Curva de Acercamiento se activa el puerto P1.4
de la NI-DAQ 6229 para generar una interrupción en la DMC 2133 y realizar la rutina
de acercamiento. Cabe mencionar que este botón sólo aparece en la interfaz cuando
el slide de la zona común está en la posición de C. de Acercamiento, esto significa que
ya se envió a la controladora de movimiento el comando “VAR1=5” por lo que al
generar la interrupción se realiza la rutina correcta. La figura B.13 muestra los eventos
descritos de manera gráfica.

Fig. B.13 Evento cuando se oprime el botón Generar Curva de Acercamiento
B.1.13 Evento al oprimir el botón Calcula Nivel de Muestra Al oprimir el botón Calcula Nivel de Muestra se envía el comando “VAR1=15” a la
DMC 2133 a través del puerto serial RS232 , el programa espera un tiempo suficiente
para asegurarse que dicho comando ya se ha ejecutado en la controladora de
movimiento y activa entonces el puerto digital P1.4 de la NI-DAQ 6229 para generar
una interrupción en la DMC 2133. La figura B.14 muestra el proceso mencionado.
Fig. B.14 Evento cuando se oprime el botón Calcula Nivel de Muestra
B.1.14 Evento al oprimir el botón INICIAR Scanning Al oprimir el botón INICIAR Scanning se envía el comando “VAR1=8” a la DMC 2133
a través del puerto serial RS232 , el programa espera un tiempo suficiente para
asegurarse que dicho comando ya se ha ejecutado en la controladora de movimiento y
activa entonces el puerto digital P1.4 de la NI-DAQ 6229 para generar una interrupción
en la DMC 2133. La figura B.15 muestra el proceso mencionado

Fig. B.15 Evento cuando se oprime el botón INICIAR Scanning
B.1.15 Evento al oprimir el botón Caracterizar muestra Al oprimir el botón Caracterizar muestra se generan y se sincronizan dos ciclos de
programación internos, uno de escritura y uno de lectura, el de escritura envía un
potencial a la muestra, la forma, la amplitud y la frecuencia del potencial es elegida por
el usuario a través de la interfaz – ver figura 4.26- . El ciclo de lectura lee la corriente
que circula por la muestra, la integra para obtener la carga y con esta información
genera la gráfica de histéresis de la muestra.
Fig. B.16 Evento cuando se oprime el botón Caracterizar Muestra
La figura B.16 muestra el algoritmo simplificado del proceso para generar la curva de
histéresis del material.

B.1.16 Evento al oprimir el botón Leer Archivo Cuando se desea observar un ciclo de histéresis cuyos datos fueron almacenados
previamente, se oprime el botón Leer Archivo, aparece entonces una ventana para
elegir el archivo a abrir, al hacerlo se despliega en la ventana gráfica de la interfaz la
curva de histéresis. Este proceso puede ser repetido varias veces y la ventana gráfica
integra las diferentes curvas cargadas por el usuario. La figura B.17 muestra el
proceso descrito.
Fig. B.17 Evento cuando se oprime el botón Leer Archivo
B.2 Algoritmos del Software en la controladora de movimiento El software desarrollado para la controladora de movimiento está dividido por tareas o
rutinas que realizan una función en particular, en la siguiente sección se describen los
diferentes algoritmos utilizados. La descripción de dichos algoritmos así como los
diagramas de flujo de las diferentes rutinas son explicados para una más fácil
comprensión y entendimiento del programa ejecutándose en la DMC 2133.
B.2.1 Programa principal en la controladora Al ejecutarse el programa en la controladora de movimientos a través del botón
EJECUTAR –ver figura 4.21- de la interfaz se configuran las resoluciones de operación
de los encoders, se establecen los parámetros PID iniciales , los parámetros de
velocidad, aceleración y desaceleración para los movimientos de cada uno de los tres
ejes.
En esta parte de la ejecución se inicializan los valores iniciales a variables utilizadas
dentro del programa, se configura la controladora para “escuchar” interrupciones de
hardware a través del puerto 4 de entrada y se mantiene un ciclo infinito en espera de
dichas interrupciones.

Cuando llega una interrupción es ejecutada una rutina dependiendo del valor de la
variable VAR1, esta variable es modificada desde la PC a través de comandos
enviados por el puerto serial RS 232 del controlador de movimientos para realizar
cierta tarea especifica. En resumen, el procedimiento general para realizar una rutina
especifica en la DMC-2133 es mostrado en la figura B.18
Fig. B.18 Proceso de atención a interrupción en DMC 2133
El diagrama de flujo que muestra las operaciones de arranque en el programa del
controlador de movimiento se muestra en la figura B.19.

Fig. B.19 Diagrama de flujo del programa principal ejecutándose en la DMC 2133
B.2.2 Rutina Subir/Bajar Rápido La rutina subir y bajar rápido en la controladora de movimientos realiza
desplazamientos del eje Z de 1200 cuentas del encoder(aprox. 3.6 micras) hacia arriba
ó abajo. Para ejecutar estas rutinas se envía desde la PC a la DMC 2133 el comando
VAR1=1 ó VAR1=2 cuando el slide de la interfaz común en la PC se desplaza hacia
dichas opciones. Una interrupción es generada vía hardware a través del puerto P1.4
de la PCI-6229 cuando se oprime el botón EXECUTE – ver interfaz en figura 4.20 - , si
el botón sigue oprimido el estado de P1.4 no cambiará por lo que el eje se mantendrá
moviendo en pasos de 1200 cuentas del encoder, cuando se libera el botón la rutina
de movimiento finaliza. La figura B.20 muestra el diagrama de flujo de este proceso en
la DMC 2133.
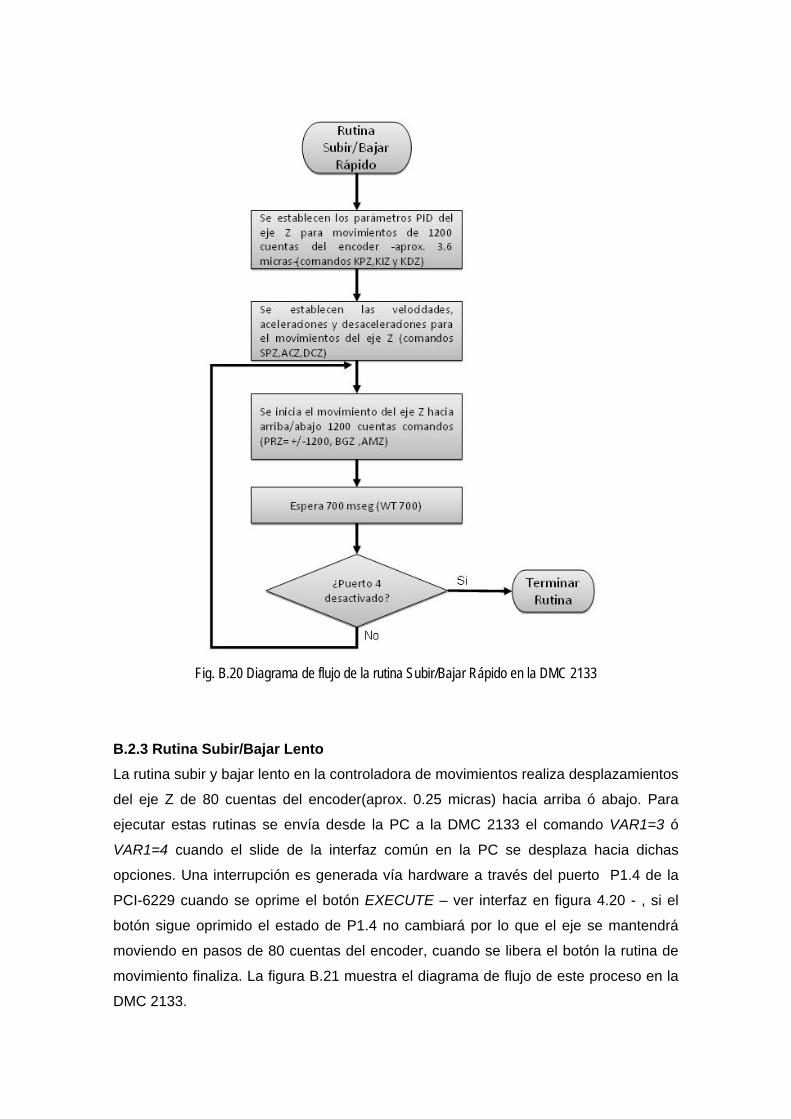
Fig. B.20 Diagrama de flujo de la rutina Subir/Bajar Rápido en la DMC 2133
B.2.3 Rutina Subir/Bajar Lento La rutina subir y bajar lento en la controladora de movimientos realiza desplazamientos
del eje Z de 80 cuentas del encoder(aprox. 0.25 micras) hacia arriba ó abajo. Para
ejecutar estas rutinas se envía desde la PC a la DMC 2133 el comando VAR1=3 ó
VAR1=4 cuando el slide de la interfaz común en la PC se desplaza hacia dichas
opciones. Una interrupción es generada vía hardware a través del puerto P1.4 de la
PCI-6229 cuando se oprime el botón EXECUTE – ver interfaz en figura 4.20 - , si el
botón sigue oprimido el estado de P1.4 no cambiará por lo que el eje se mantendrá
moviendo en pasos de 80 cuentas del encoder, cuando se libera el botón la rutina de
movimiento finaliza. La figura B.21 muestra el diagrama de flujo de este proceso en la
DMC 2133.
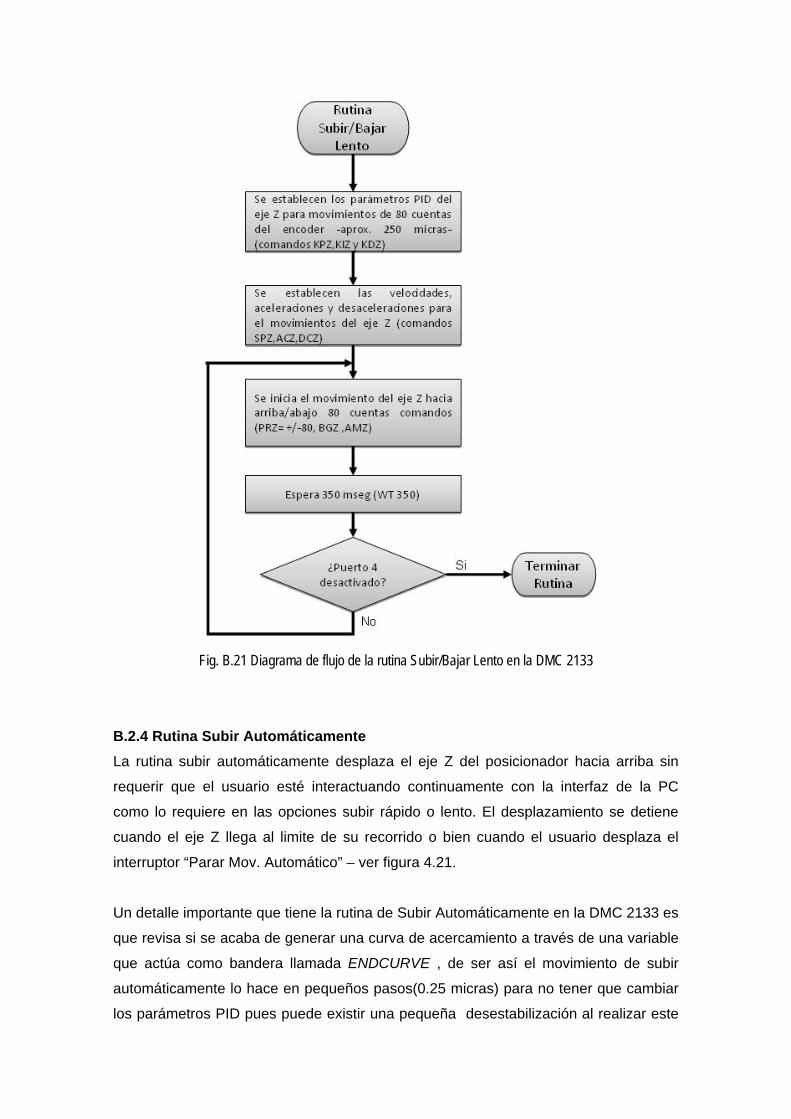
Fig. B.21 Diagrama de flujo de la rutina Subir/Bajar Lento en la DMC 2133
B.2.4 Rutina Subir Automáticamente La rutina subir automáticamente desplaza el eje Z del posicionador hacia arriba sin
requerir que el usuario esté interactuando continuamente con la interfaz de la PC
como lo requiere en las opciones subir rápido o lento. El desplazamiento se detiene
cuando el eje Z llega al limite de su recorrido o bien cuando el usuario desplaza el
interruptor “Parar Mov. Automático” – ver figura 4.21.
Un detalle importante que tiene la rutina de Subir Automáticamente en la DMC 2133 es
que revisa si se acaba de generar una curva de acercamiento a través de una variable
que actúa como bandera llamada ENDCURVE , de ser así el movimiento de subir
automáticamente lo hace en pequeños pasos(0.25 micras) para no tener que cambiar
los parámetros PID pues puede existir una pequeña desestabilización al realizar este

cambio y por lo tanto posible choque entre la punta y la superficie siendo estudiada.
En caso de que no se haya realizado previamente una curva de acercamiento el
desplazamiento del eje Z se realiza en desplazamientos de 3.6 micras. La figura B.22
muestra el diagrama de flujo de este proceso en la DMC 2133.
Fig. B.22 Diagrama de flujo de la rutina Subir Automáticamente en la DMC 2133
B.2.5 Rutina Bajar Automáticamente La rutina bajar automáticamente desplaza el eje Z del posicionador hacia abajo sin
requerir que el usuario esté interactuando continuamente con la interfaz de la PC
como lo requiere en las opciones bajar rápido o lento. El desplazamiento se detiene
debido a una de las siguientes causas:
a)Cuando la corriente en la celda llega a un 80% de la corriente al iniciar el
recorrido(sustrato dieléctrico).
b)Cuando la corriente en la celda llega a un 120% de la corriente al iniciar el
recorrido(sustrato conductor).

c)Cuando el usuario desplaza el interruptor “Parar Mov. Automático” – ver figura 4.21.
En los casos a) y b) la punta del UME se encuentra cerca de una superficie dieléctrica
o conductora y puede generarse en una zona cercana una curva de acercamiento para
posterior realizar un rastreo sobre la superficie y obtener su morfología a partir de la
información obtenida en la curva. La figura B.23 muestra el diagrama de flujo de todo
el algoritmo en la DMC 2133.
Fig. B.23 Diagrama de flujo de la rutina Bajar Automáticamente en la DMC 2133
B.2.6 Rutina Generar Curva de Acercamiento La rutina generar curva de acercamiento produce movimientos secuenciales de 0.25
micras en el eje Z , estos movimientos acercan la punta del UME a la superficie
mientras mantienen el control sobre la posición de los ejes X y Y. Cada vez que se
hace un desplazamiento del eje Z, se dispara a través del puerto de salida 2 de la
DMC 2133 el hardware de lectura de corriente en la PC sincronizando de esta manera
las dos tareas ejecutándose concurrentemente.

El movimiento de la punta hacia la superficie se detiene cuando se recibe una señal en
el puerto 5 de entrada de la DMC, esta señal llega de la PCI-6229 y es generada por el
software de LabView cuando se llega al porcentaje de la corriente inicial definido en la
interfaz –ver figura 4.21-. La figura B.24 muestra el diagrama de flujo de este
algoritmo en la DMC 2133.
Fig. B.24 Diagrama de flujo de la rutina Generar Curva de Acercamiento en la DMC 2133
B.2.7 Rutina Mover X/Y La tarea de la rutina mover X/Y desplaza el eje X/Y en cantidades de movimiento de
10, 25, 50 ó 100 micras. A través del interruptor booleano Dirección X/Y se define el
sentido del movimiento. La figura B.25 muestra el diagrama de flujo de este algoritmo
en la DMC 2133.

Fig. B.25 Diagrama de flujo de la rutina Mover X/Y en la DMC 2133
B.2.8 Rutina Motor X/Y ON/OFF Estas tareas permiten encender o apagar la etapa de potencia del servoamplificador
X/Y, esto se realiza a través de los comandos SH(Servo Here) y MO(Motor Off). Antes
de enviar la ejecución de las rutinas se envía desde la PC a la DMC 2133 el comando
VAR1=11, VAR1=12, VAR1=13 ó VAR1=14 , con el fin de que la posterior interrupción
realice la rutina correspondiente.
Al apagar los motores se pueden mover manualmente los ejes del motor X y/o Y y
posicionar la punta en un lugar deseado sobre la superficie, se debe tomar especial
cuidado en que la punta del UME se encuentre suficientemente lejos de la superficie
para no dañarla con los movimientos manuales de los ejes X y Y. La figura B.26
muestra los diagramas de flujo de estos cortos algoritmos en la DMC 2133.

Fig. B.26 Diagrama de flujo de las rutinas Motor X/Y ON/OFF en la DMC 2133
B.2.9 Rutina Calcula Nivel de muestra La rutina calcula nivel de muestra sirve para obtener los valores de las pendientes de
la superficie a estudiar respecto a desplazamientos del UME sobre el eje X y el eje Y.
Se asume que antes de la ejecución de la rutina debió de haberse generado una curva
de acercamiento en el software de LabView ejecutándose en la PC, la curva provee
información inicial necesaria para conocer exactamente la inclinación de la superficie
estudiada.
La rutina para obtener la pendiente se basa en realizar 3 movimientos de
acercamiento en el eje Z sobre la superficie, cada movimiento se realiza en un punto
diferente separado una distancia dada por el control Desplazamiento(micras) –ver
figura 4.23 – . El primer punto es el lugar donde se efectuó la curva de acercamiento
que se debió realizar previamente, el segundo punto está localizado sobre la misma
coordenada Y pero a una distancia sobre el eje X dada por el control mencionado
previamente, el tercer punto está alineado con el segundo pero desplazado esta
misma distancia sobre el eje Y. La figura B.27 muestra esquemáticamente los puntos
mencionados y el sentido del recorrido de la punta del UME.

Fig. B.27 Calculo de los niveles de la superficie por el método de los 3 puntos
El principio de operación del método consiste en determinar la posición del encoder
del eje Z para un mismo valor de corriente, la diferencia entre los valores del encoder
para un nivel de corriente especifica entre la distancia recorrida es la pendiente de la
superficie en un sentido determinado. La figura B.28 muestra el diagramas de flujo de
este algoritmo en la DMC 2133.

Fig. B.28 Algoritmo para la obtención del nivel de la superficie de una muestra
B.2.10 Rutina Scanning La rutina de Scanning realiza un barrido del UME sobre una superficie bajo la técnica
de altura constante. El algoritmo mueve la punta en el sentido X en recorridos lineales
, salta de línea al final de su recorrido moviendo el eje Y y retorna a su posición inicial
para repetir este proceso el número de líneas necesarias para cubrir el área del
recorrido.
Al realizar movimientos en el eje X ó en el eje Y durante el proceso de scanning, el
UME es desplazado también a través del eje Z con el fin de mantener la altura
constante en el recorrido, esto sucede cuando la superficie tiene un declive respecto al
plano horizontal X-Y donde está colocado el posicionador. La cantidad de los
desplazamientos del eje Z durante el scanning se obtienen de la información
generada por la rutina Calcula Nivel de Muestra explicada anteriormente. La figura
B.29 muestra los diagramas de flujo de este algoritmo en la DMC 2133.

Fig. B.29 Algoritmo del proceso de Scanning en la DMC 2133

ANEXO C
PRODUCCIÓN CIENTÍFICA

DESARROLLO DE UN SISTEMA PARA OBTENER CICLOS DE HISTÉRESIS DE MATERIALES UTILIZANDO UN POTENCIOSTATO
1,2J. Guillén-Rodríguez*, 1A. Zapata-Navarro, 1M. Zapata-Torres, 1A. Márquez-Herrera
1CICATA-IPN Unidad Legaria, Legaria 694, Col. Irrigación, Delegación Miguel
Hidalgo, C.P. 11500 , México D.F., México. 2I.T.E.S.M. Campus Tampico, Puerto Industrial, Altamira, Tamaulipas, México,
C.P. 89600
* [email protected] Se implementó un sistema para medir propiedades ferroeléctricas utilizando un potenciostato/galvanostato (POT/GAL) en un circuito Tower-Sawyer modificado. Una tarjeta de adquisición de datos y una computadora personal fueron usadas para controlar de manera remota el POT/GAL y a través de los puertos análogos y digitales de entrada y salida fueron programados y leídos el potencial y corriente en las muestras. El POT/GAL fue utilizado debido a su muy alta impedancia de entrada comparada con los circuitos hechos en laboratorios para obtener los ciclos de histéresis de muestras ferroeléctricas. Se desarrolló un software que controla completamente el POT/GAL, así como la amplitud, frecuencia y el tipo de señal aplicada a la muestra. Obtiene los ciclos de histéresis de la polarización espontánea versus potencial eléctrico y despliega los valores del potencial coercitivo y polarización remanente. Para comprobar la funcionalidad de nuestro sistema se caracterizaron capacitores ferroeléctricos de material Pb(ZrxTi1-x)O3 conocido también como PZT (4,000 y 10,000μ2 de área y 255 nm de espesor) a diferente potencial(1-9 volts) y frecuencia( 1-45 Hz ) y se compararon los resultados con las mediciones en un equipo de Radiant Technologies Inc. resultando buena concordancia entre ambas mediciones . A novel system to measure ferroelectric properties of films using a potensiostat/galvanostat (POT/GAL) with a modified Tower-Sawyer circuit was setted up. A data acquisition card and a desktop computer were used to control the POT/GAL. The DAQ´s analog and digital input/outputs ports were programmed for read the potential and current in the samples. The POT/GAL was used because it has a higher input impedance than homemade circuits used in laboratories to obtain hysteresis loops of ferroelectric samples. A software was developed to fully control the POT/GAL, it also controls the amplitude and frequency of the potential applied to the samples. Obtains the spontaneous polarization versus electric field hysteresis loops, and display the values of coercive potential and remanent polarization. To explore the functionality or our set up, commercial PZT (Lead Zirconate Titanate) ferroelectric capacitors (4,000 y 10,000μ2 area, 255nm thickness) were characterized. The results of polarization versus electric potential of these capacitors for different frequencies(1-45 Hz) and different excitation voltages(1-9 volts) were made, the samples were also characterized with a commercial equipment from Radiant Technology. The result showed a good agreement in both equipment, showing the functionality of our set up.

1.- Introducción Durante los años recientes, se ha incrementado el interés en las propiedades que permiten emplear como sensores a los materiales ferroeléctricos [1]. Basados en los fenómenos piezoeléctricos, piroeléctricos, dieléctricos y de conducción, varios campos de aplicación pueden ser mencionados, tales como aplicaciones automotrices y espaciales, comunicaciones, monitoreo ambiental y memorias de acceso aleatorio no volátiles [2-5]. Un material ferroeléctrico, es un dieléctrico, que presenta una polarización espontánea, Ps, aún en ausencia de campo eléctrico externo, dicha polarización se puede invertir de signo al invertir el signo del campo eléctrico aplicado. Una condición para que exista la ferroelectricidad es la ausencia de un centro de simetría en la estructura cristalina del material. La polarización eléctrica es el parámetro principal para la caracterización de materiales ferroeléctricos. Usualmente, este parámetro es deducido de los ciclos de histéresis que son obtenidos graficando el cambio de polarización contra el campo eléctrico aplicado. Para obtener la curva de histéresis del material ferroeléctrico a bajas frecuencias comúnmente se utiliza el circuito Tower-Sawyer [6] o algunas modificaciones de él. Básicamente lo que hace el circuito es aplicar un potencial a la muestra y medir la carga que fluye desde y hacia los electrodos del material ferroeléctrico estudiado. La necesidad de automatizar procesos de medición en los laboratorios e implementar sistemas que permitan realizar tareas diversas sin necesidad de utilizar equipo especializado es una labor común en el mundo científico. El uso de una PC, tarjetas de adquisición de datos y un software de programación facilitan en gran medida el desarrollo de este tipo de sistemas. LabView [7] es uno de los lenguajes que se utilizan para la automatización de procesos, no solo por su facilidad de programación, sino porque también permite presentar una interfaz con un ambiente muy similar a los dispositivos reales. En este trabajo presentamos un sistema innovador para caracterizar capacitores o películas ferroeléctricas utilizando un potenciostato/galvanostato (POT/GAL), así como su automatización utilizando LabView. Se valida este sistema caracterizando capacitores de PZT de diferentes tamaños, y comparando estos resultados con los obtenidos en un equipo comercial de Radiant Technologies Inc. 2.- Configuración del sistema y Software El circuito usado comúnmente para la medición de propiedades del fenómeno ferroeléctrico es el Tower-Sawyer, este circuito puede ser implementado a través de un amplificador operacional [8] como se muestra en la figura 1. En esta figura Cfe es el capacitor ferroeléctrico a estudiar, Cr es un capacitor de retroalimentación de valor conocido, Vin es el potencial aplicado a la muestra y Vout es el potencial de salida. Tanto Cfe como Cr se encuentran conectados a tierra virtual pues ambas entradas del circuito operacional se mantienen siempre al mismo potencial, como consecuencia de esto Cfe recibe completamente el potencial Vin y la carga viajando a través del capacitor estudiado solo puede fluir a través de Cr debido a la elevada impedancia de entrada del operacional, por lo que el potencial de salida es proporcional a la carga de Cr debido a que Vout = Q/Cr, entonces la polarización es obtenida dividiendo Q entre el área de las placas de Cfe.

Fig. 1.- Circuito Tower-Sawyer para medir propiedades ferroeléctricas
Para fines prácticos se considera que los circuitos operacionales tienen una impedancia de entrada infinita, la realidad es que no es así, su impedancia de entrada oscila entre los cientos de megaohms a miles de megaohms. Nuestra configuración usa un POT/GAL, éste puede considerarse como un amplificador operacional ideal en muchos sentidos. La configuración simplificada de la operación típica de un potenciostato controlando una celda electroquímica se muestra en la figura 2. La celda electroquímica es la red de retroalimentación del operacional (POT/GAL) y éste provee la suficiente corriente a través de su electrodo auxiliar para que el potencial entre el electrodo de trabajo y el de referencia siga exactamente al potencial de control.
Fig. 2. El potenciostato operando como un operacional ideal
Otra característica importante del POT/GAL es que puede suministrarle un potencial de control a un circuito, y que este potencial de control lo podemos modular proporcionándole una función externa. Esta función la podemos introducir mediante un
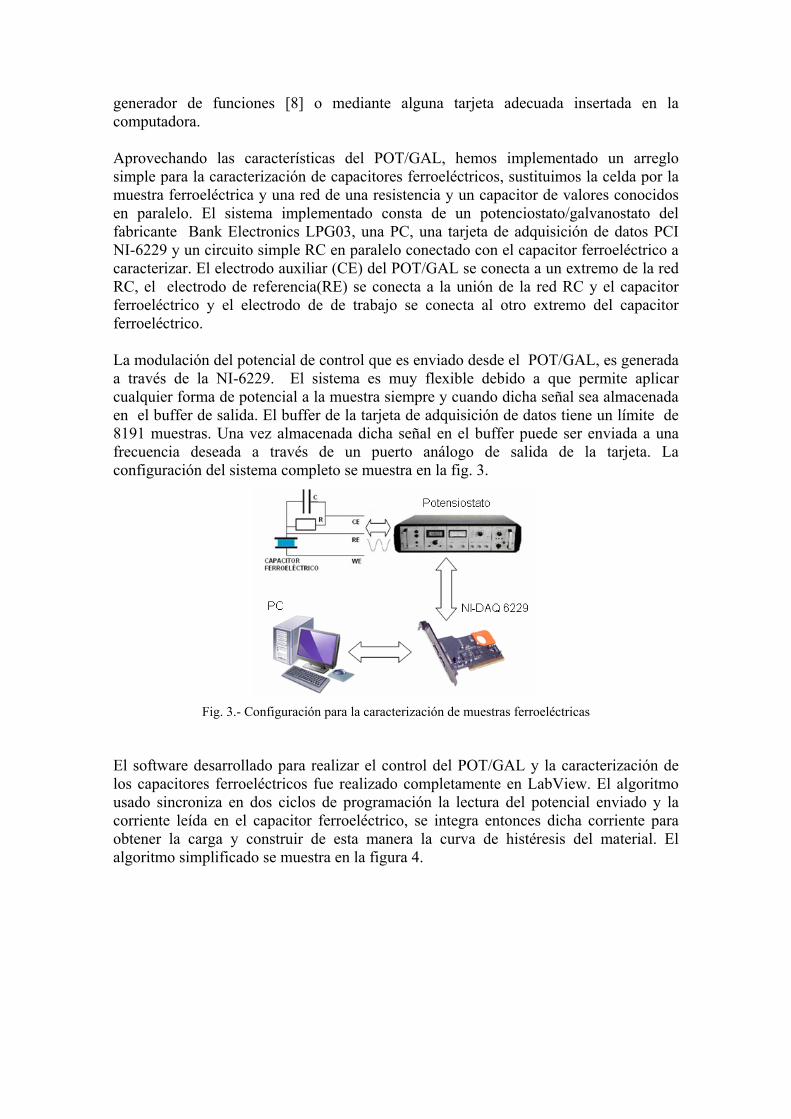
generador de funciones [8] o mediante alguna tarjeta adecuada insertada en la computadora. Aprovechando las características del POT/GAL, hemos implementado un arreglo simple para la caracterización de capacitores ferroeléctricos, sustituimos la celda por la muestra ferroeléctrica y una red de una resistencia y un capacitor de valores conocidos en paralelo. El sistema implementado consta de un potenciostato/galvanostato del fabricante Bank Electronics LPG03, una PC, una tarjeta de adquisición de datos PCI NI-6229 y un circuito simple RC en paralelo conectado con el capacitor ferroeléctrico a caracterizar. El electrodo auxiliar (CE) del POT/GAL se conecta a un extremo de la red RC, el electrodo de referencia(RE) se conecta a la unión de la red RC y el capacitor ferroeléctrico y el electrodo de de trabajo se conecta al otro extremo del capacitor ferroeléctrico. La modulación del potencial de control que es enviado desde el POT/GAL, es generada a través de la NI-6229. El sistema es muy flexible debido a que permite aplicar cualquier forma de potencial a la muestra siempre y cuando dicha señal sea almacenada en el buffer de salida. El buffer de la tarjeta de adquisición de datos tiene un límite de 8191 muestras. Una vez almacenada dicha señal en el buffer puede ser enviada a una frecuencia deseada a través de un puerto análogo de salida de la tarjeta. La configuración del sistema completo se muestra en la fig. 3.
Fig. 3.- Configuración para la caracterización de muestras ferroeléctricas
El software desarrollado para realizar el control del POT/GAL y la caracterización de los capacitores ferroeléctricos fue realizado completamente en LabView. El algoritmo usado sincroniza en dos ciclos de programación la lectura del potencial enviado y la corriente leída en el capacitor ferroeléctrico, se integra entonces dicha corriente para obtener la carga y construir de esta manera la curva de histéresis del material. El algoritmo simplificado se muestra en la figura 4.

Fig. 4.- Algoritmo simplificado para obtener la curva de histéresis del material ferroeléctrico
El software tiene 3 interfases: a) la interfaz de configuración y control del POT/GAL, b) la interfaz de caracterización y c) la interfaz de análisis. En la figura 5 se muestra la primera interfaz del software, ésta permite al usuario almacenar información referente al experimento a realizar y controla completamente el potenciostato, el usuario define en esta zona el rango de la corriente a utilizar en la caracterización y un posible “offset” agregado a la señal que se aplicara a la película ferroeléctrica activa y desactiva el electrodo auxiliar, controla el modo de operación del equipo (Potenciostato o Galvanostato) y el modo de control del equipo (manual o remoto).

Fig. 5. Interfaz de configuración inicial del experimento
La interfaz empleada para caracterizar una muestra de material ferroeléctrico se muestra en la figura 6. El usuario define parámetros como el tipo de señal a aplicar a la muestra (senoidal, triangular, etc.), la frecuencia y la amplitud del potencial a aplicar. También se define aquí la velocidad de muestreo de las señales de corriente y voltaje en el POT/GAL (la máxima velocidad de muestreo es de 100,000Hz) y el número de muestras que se utilizan para generar la señal que excitará al material (máximo 8191). Se filtra a través de software con la técnica de FTT el ruido de 60Hz inducido en las lecturas de muy bajas corrientes en el equipo y se permite al usuario almacenar los datos obtenidos de la caracterización. El software despliega gráficamente la caracterización, así como el potencial aplicado y la corriente leída en la muestra ferroeléctrica.
Fig. 6. Interfaz de caracterización de muestras ferroeléctricas

En la última sección del software se leen los archivos conteniendo los ciclos de histéresis de la caracterización ferroeléctrica y se obtienen parámetros importantes como el potencial coercitivo y la polarización remanente del ciclo, se muestra en la misma gráfica cada curva leída para hacer una comparación visual entre varias corridas de la misma muestra o entre corridas excitadas a diferente potencial o frecuencia. Se muestra el contenido del archivo de datos de la última curva de histéresis leída y se permite realizar acercamientos o alejamientos en diferentes secciones de la gráfica. La fig. 7 muestra esta interfaz.
Fig. 7. Interfaz de análisis de la caracterización
3.- Resultados Empleando como herramienta de medición a un potenciostato se caracterizaron capacitores ferroeléctricos comerciales, El equipo utilizado tiene la ventaja de ser un sistema de medición de muy alta impedancia de entrada (similar a la impedancia de entrada de los equipos de Radiant Technologies de alto desempeño) comparada versus los circuitos armados en laboratorio para obtener dichas curvas [8-9]. El circuito es muy simple y los valores de R y C dependen del máximo valor de potencial que puede proporcionar el potenciostato a través del electrodo auxiliar – en nuestro caso fue de 33 volts - y de la corriente instantánea máxima que pueda producirse en el circuito. Dependiendo del área del capacitor a caracterizar se utilizaron resistencias en el rango de 2.2 kΩ-1.2 MΩ y capacitores en el rango de 1 nF-22 nF, la función de la resistencia es el reducir el potencial que llega desde el electrodo auxiliar y la del capacitor es la de proporcionar la carga abrupta que demanda el capacitor ferroeléctrico en su zona de transición de corriente.

Con el objetivo de validar el sistema de mediciones desarrollado, se caracterizaron capacitores de 4000 μ2 y 10,000 μ2 de área y 255 nm de espesor a diferentes voltajes (1-9 Volts) y frecuencias de excitación (1-45 Hz). Esto fue realizado utilizando el sistema de mediciones desarrollado y un equipo comercial de Radiant Technologies. Cabe hacer mención de que se escogieron estos capacitores debido a que: a) el de 4000 μ2 es el de menor área que puede ser caracterizado con nuestro sistema desarrollado debido a sus muy bajas corrientes (de fracciones de nanoamperes) y a que la escala menor de corriente en nuestro POT/GAL es de 100 nA, y b) el equipo de Radiant está limitado para áreas menores a 10,000 μ2 para el tipo de capacitores probados. En la Fig. 8 Se pueden observar los resultados de la caracterización del capacitor de 10,000µ2 de área excitados a 8 volts y a diferentes frecuencias y la misma caracterización hecha en un equipo de Radiant Technologies. Se puede observar que el capacitor tiene un comportamiento muy similar a diferentes frecuencias, se nota también en nuestra medición una pequeña distorsión y doblez en los extremos debido a la falta de compensación en el circuito utilizado en la medición, la solución a los problemas de compensación es discutido por varios autores [10-12] .
Fig. 8. Caracterización de capacitor PZT a diferentes frecuencias.
A)Sistema desarrollado B)Equipo de Radiant Technologies
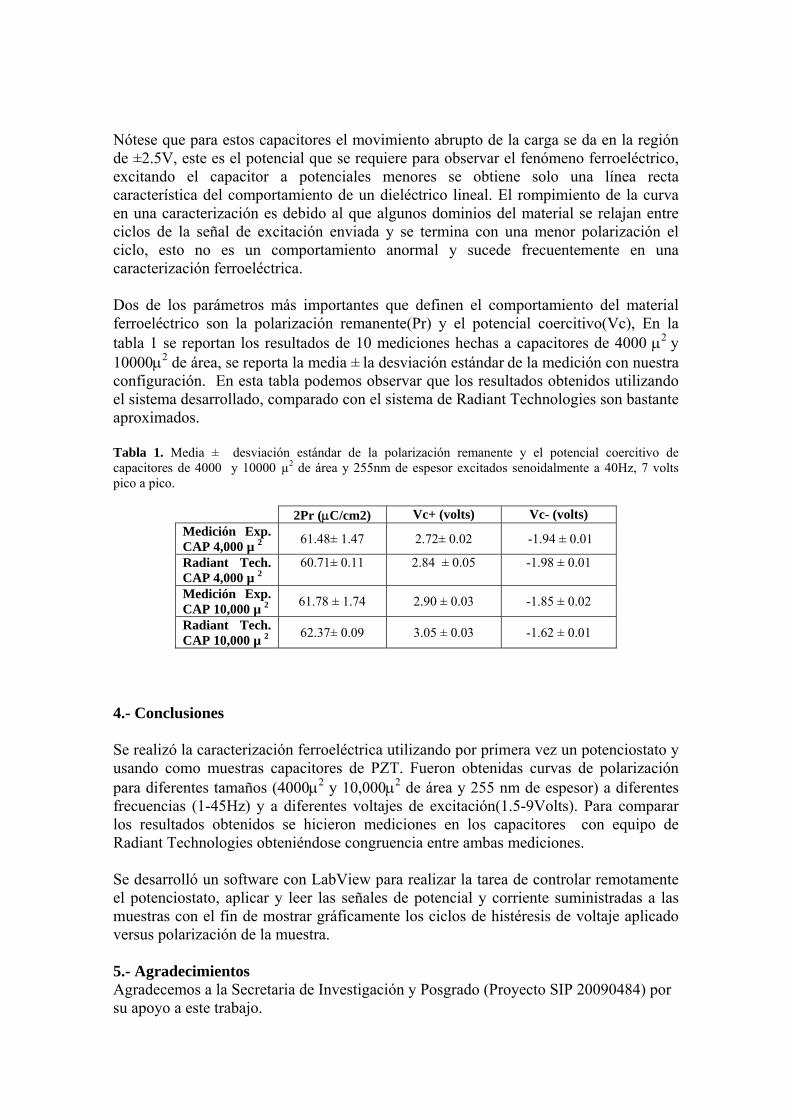
Nótese que para estos capacitores el movimiento abrupto de la carga se da en la región de ±2.5V, este es el potencial que se requiere para observar el fenómeno ferroeléctrico, excitando el capacitor a potenciales menores se obtiene solo una línea recta característica del comportamiento de un dieléctrico lineal. El rompimiento de la curva en una caracterización es debido al que algunos dominios del material se relajan entre ciclos de la señal de excitación enviada y se termina con una menor polarización el ciclo, esto no es un comportamiento anormal y sucede frecuentemente en una caracterización ferroeléctrica.
Dos de los parámetros más importantes que definen el comportamiento del material ferroeléctrico son la polarización remanente(Pr) y el potencial coercitivo(Vc), En la tabla 1 se reportan los resultados de 10 mediciones hechas a capacitores de 4000 μ2 y 10000μ2 de área, se reporta la media ± la desviación estándar de la medición con nuestra configuración. En esta tabla podemos observar que los resultados obtenidos utilizando el sistema desarrollado, comparado con el sistema de Radiant Technologies son bastante aproximados. Tabla 1. Media ± desviación estándar de la polarización remanente y el potencial coercitivo de capacitores de 4000 y 10000 µ2 de área y 255nm de espesor excitados senoidalmente a 40Hz, 7 volts pico a pico.
2Pr (μC/cm2) Vc+ (volts) Vc- (volts) Medición Exp. CAP 4,000 µ 2 61.48± 1.47 2.72± 0.02 -1.94 ± 0.01
Radiant Tech. CAP 4,000 µ 2
60.71± 0.11 2.84 ± 0.05 -1.98 ± 0.01
Medición Exp. CAP 10,000 µ 2 61.78 ± 1.74 2.90 ± 0.03 -1.85 ± 0.02
Radiant Tech. CAP 10,000 µ 2 62.37± 0.09 3.05 ± 0.03 -1.62 ± 0.01
4.- Conclusiones Se realizó la caracterización ferroeléctrica utilizando por primera vez un potenciostato y usando como muestras capacitores de PZT. Fueron obtenidas curvas de polarización para diferentes tamaños (4000μ2 y 10,000μ2 de área y 255 nm de espesor) a diferentes frecuencias (1-45Hz) y a diferentes voltajes de excitación(1.5-9Volts). Para comparar los resultados obtenidos se hicieron mediciones en los capacitores con equipo de Radiant Technologies obteniéndose congruencia entre ambas mediciones. Se desarrolló un software con LabView para realizar la tarea de controlar remotamente el potenciostato, aplicar y leer las señales de potencial y corriente suministradas a las muestras con el fin de mostrar gráficamente los ciclos de histéresis de voltaje aplicado versus polarización de la muestra. 5.- Agradecimientos Agradecemos a la Secretaria de Investigación y Posgrado (Proyecto SIP 20090484) por su apoyo a este trabajo.

6.- Referencias [1] D. Damjanovic, P. Muralt, and N. Setter, “Ferroelectric sensors,” IEEE Sensors J., vol. 1, no. 3, pp. 191–206, Oct. 2001. [2] E. Supriyanto, H. Goebel, “Characterization of Ferroelectric Caacitors over Wide Frequency Range”, ICM 2003, Dec 9-11, pp.283-286, Cayro Egypt. [3] V. Meyer, JM. Sallase , P. Fazan, D. Bard, F. Pecheux, “Modeling the polarization in ferroelectric materials: a novel analytical approach”, Solid-State Electronics 47 (2003) pp1479-1486. [4] M. Okuyama, “Microsensors and microactuator using ferroelectric thin films,” in Proc. Int. Symp. Micromechatronics and Human Sci., 1998, pp. 29–34. [5] M. E. Lines and A. M. Glass, Principles and Applications of Ferroelectrics and Related Materials. London, U.K.: Oxford Univ. Press. [6] C.B. Sawyer, C.H. Tower,”Rochelle Salt as a dielectric”, Phys. Rev. 35,269(1935) [7] P. Kis, M. Kuczmann, J. Füzi, A. Iványi, “Hysteresis measurement in LabView”, Physica B 343 (2004) pp 357-363 [8]B. Andò, P. Giannone, S. Graziani, “A New Platform for Modeling Ferroelectric Devices”, IEEE Transactions on Instrumentation and Measurement, 55-6(2006) pp 1996-2005. [9]G. Ornelas-Arciniega, J. Reyes-Gómez, A. G. Castellanos-Guzmán, “A New Modification to the Sawyer-Tower Ferroelectric Hysteresis Loop Tracer”, Journal of the Korean Physical Society, 32(1998), pp 380-381 [10] J. K. Sinha, “Modified Sawyer and Tower circuit for the investigation of ferroelectric samples”, J. Scientific Instruments, 42(1965), pp 696-698 [11] J. Mastner , “A quasistatic loop tracer”, J. Scientific Instruments, 1(1968), pp 1249 [12] J. Liu, X. Yao , “A new digital measuring system of ferroelectric hysteresis loop and field induced strain of ferroelectric materials”, Ceramics International 30 (2004) pp 2033-2036

PARTICIPACIÓN EN CONGRESOS, PREMIOS OBTENIDOS Y PRODUCCIÓN CIENTÍFICA DURANTE EL DOCTORADO
Novel System To Obtain Spontaneous Polarization Versus Electric Field Hysteresis Loop Of Ferroelectric Samples XVIII International Materials Research Congress 2009, 16 - 21 August, Cancún, Mexico Study of the Frequency effect of Electrodeposited TiO2 Films Growth By Pulsed Electrodeposition XVIII International Materials Research Congress 2009, 16 - 21 August, Cancún, Mexico Caracterización de Materiales Ferroeléctricos utilizando un Potensiostato III Simposio de Tecnología Avanzada, CICATA IPN Unidad Legaria, México D.F., Jun17-23 , 2009. 1er Lugar Concurso Institucional I.P.N. al mejor software desarrollado en la categoría Posgrado por “MicroElechem” , software para mediciones microscópicas en Electroquímica. Instituto Politécnico Nacional , México D.F. , Noviembre de 2008 “Desarrollo de Software para Mediciones en Microscopía Electroquímica sobre Materiales Ferroeléctricos” II Simposio de Tecnología Avanzada, CICATA IPN Unidad Legaria, México DF, Nov 26 a Dic. 3 , 2008. Study Of The Stirring Effect Of Electrodeposited TiO2 Films Growth On Metallic Substrates International Materials Research Congress, Cancun México, August 17-21, 2008. Diseño y Construcción de un Microscopio Electroquímico para Estudio de Materiales Ferroeléctricos I Simposio de Tecnología Avanzada, CICATA IPN Unidad Legaria, México DF, Junio 16-20 , 2008. Diseño de un Sistema Electroquímico para Medición de Espesores en Películas no Conductoras 37° Congreso de Investigación y Desarrollo del Tecnológico de Monterrey, ITESM C. Toluca, Toluca, Edo. de México, Enero 17-19, 2007. Automatización del Proceso de RF-Sputtering Reactivo Utilizado en la Preparación de Películas para Aplicaciones en Optoelectrónica 18º Encuentro de Investigación Científica y Tecnológica del Golfo de México. Asociación Tamaulipeca de Investigación Científica y Tecnológica A. C. Tampico, Tam. Abril 26-28, 2006. Diseño y Construcción de un Sistema de Tratamientos Térmicos para Películas Delgadas 18º Encuentro de Investigación Científica y Tecnológica del Golfo de México. Asociación Tamaulipeca de Investigación Científica y Tecnológica A. C. Tampico, Tam. Abril 26-28, 2006. Diseño De Sistema Electroquímico Para Medición De Películas No Conductoras Segundo Congreso Internacional de Ingeniería, Universidad Autónoma de Querétaro, Querétaro Qro. Marzo14-17, 2006. Control Computarizado De Motores De Alta Precisión Para Uso En Un Microscopio Electroquímico 17º Encuentro de Investigación Científica y Tecnológica del Golfo de México. Asociación Tamaulipeca de Investigación Científica y Tecnológica A. C. Altamira, Tam. Mayo, 2005.