
Taller de Sistemas Robóticos
20
Taller de Sistemas Robóticos Guía de Autoaprendizaje Suely Contreras
Transcript of Taller de Sistemas Robóticos
Taller de Sistemas Robóticos Guía de Autoaprendizaje
Suely Contreras

MINISTERIO DE EDUCACIÓN
DIRECCIÓN DE EDUCACIÓN DE SAN MIGUELITO
INSTITUTO RUBIANO
TRIMESTRE: II
TALLER DE SISTEMAS ROBÓTICOS
GRADO 12°
Profa. Suely Contreras
email: [email protected]
Fecha de entrega:
12 de noviembre de 2021
Contenido
Guía 1: Componentes principales ........................................................................... 1
Lectura: Componentes principales ....................................................................... 1
Los sensores ........................................................................................................ 3
EL SENSOR DIGITAL ...................................................................................... 3
EL SENSOR ANALÓGICO ............................................................................... 3
Los actuadores .................................................................................................... 4
Guía 2: Interfaz ........................................................................................................ 7
Lectura 2: ¿Qué es un Simulador? ...................................................................... 7
Que es el IDE de Arduino .................................................................................... 8
Configuración inicial del IDE ................................................................................ 9
Cargar un Programa en Arduino ....................................................................... 9
Guía 3: Paleta de programación ............................................................................ 12
Lectura 3: Paleta de programación .................................................................... 12
ELEMENTOS DE SINTAXIS: ......................................................................... 13
3.2 Funciones básicas de la Programación con Arduino. .................................. 14
1
Guía 1: Componentes principales
Objetivo de Aprendizaje:
➢ Construye dispositivos robóticos, tomando conciencia de seguir un diseño propuesto, que dé respuesta a la solución de un problema.
Indicadores de logros: -Expresa de forma verbal lo importante que son las diferentes piezas, los sensores y los actuadores que intervienen en la construcción de un prototipo de robot, para luego programarlo.
Lectura: Componentes principales
Un robot es un sistema electromecánico programable. O sea, un sistema que puede
ponerse en movimiento (mecánica), porque recibe impulsos eléctricos o electrones
(electrónica) y que recibe órdenes, que se las damos mediante programación
(informática). Como vemos, confluyen diferentes disciplinas.
Un robot Arduino es aquel que incorpora la licencia de código abierto y hardware
libre de Arduino. Es lo que se conoce como <<open source >>. Arduino es un
proyecto colaborativo que ha ofrecido sistemas baratos, útiles y fáciles de utilizar
para fomentar el aprendizaje de la robótica y la electrónica.
Pines digitales
Los pines digitales son los de arriba.
Sólo emiten o reciben a cero o a cinco
voltios. Sin valores intermedios. Para
entenderlo, si utilizáramos una luz, o
bien estaría apagada (0 voltios) o bien
está encendida (a 5 voltios). Como
cuando enciendes o apagas la luz con
el interruptor de tu casa. Si tuviéramos
un pequeño diodo led, aquí
engancharíamos, de las dos patas, la
más larga (positivo).
¿Por qué decimos esto del diodo led?
Bueno, es que es una de las típicas
cosas que se utiliza para aprender y
explicarlo. Son de colores y tienen dos
patitas.
Pines tipo PWM
Los pines tipo PWM también son
digitales, pero tienen la particularidad
de que pueden emitir a valores
intermedios entre 0 y 5 voltios, según
decida el usuario (puede emitir a 1,
2
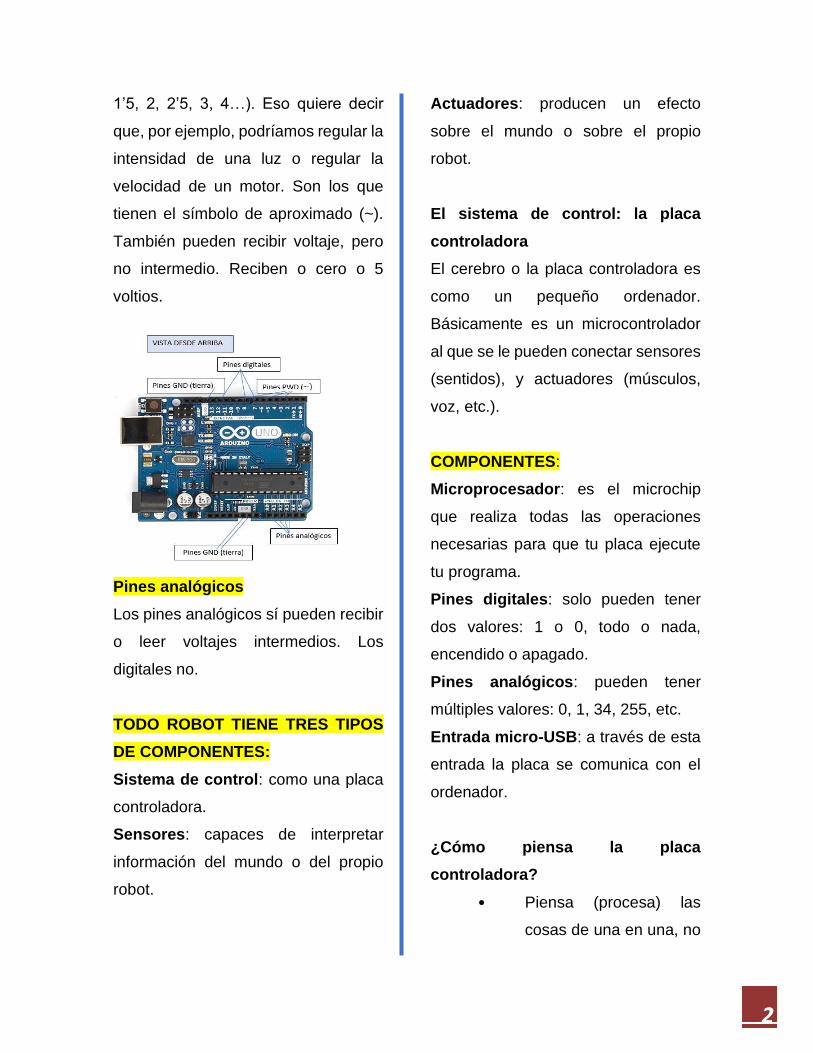
1’5, 2, 2’5, 3, 4…). Eso quiere decir
que, por ejemplo, podríamos regular la
intensidad de una luz o regular la
velocidad de un motor. Son los que
tienen el símbolo de aproximado (~).
También pueden recibir voltaje, pero
no intermedio. Reciben o cero o 5
voltios.
Pines analógicos
Los pines analógicos sí pueden recibir
o leer voltajes intermedios. Los
digitales no.
TODO ROBOT TIENE TRES TIPOS
DE COMPONENTES:
Sistema de control: como una placa
controladora.
Sensores: capaces de interpretar
información del mundo o del propio
robot.
Actuadores: producen un efecto
sobre el mundo o sobre el propio
robot.
El sistema de control: la placa
controladora
El cerebro o la placa controladora es
como un pequeño ordenador.
Básicamente es un microcontrolador
al que se le pueden conectar sensores
(sentidos), y actuadores (músculos,
voz, etc.).
COMPONENTES:
Microprocesador: es el microchip
que realiza todas las operaciones
necesarias para que tu placa ejecute
tu programa.
Pines digitales: solo pueden tener
dos valores: 1 o 0, todo o nada,
encendido o apagado.
Pines analógicos: pueden tener
múltiples valores: 0, 1, 34, 255, etc.
Entrada micro-USB: a través de esta
entrada la placa se comunica con el
ordenador.
¿Cómo piensa la placa
controladora?
• Piensa (procesa) las
cosas de una en una, no
3
puede hacer dos cosas a
la vez.
• Piensa y repite acciones
muy rápido, tanto que a
veces no podemos ni ver
lo que está haciendo y
hay que decirle que
espere un poco.
• Nunca hace nada que no
le hayas dicho. Hay que
programar todo lo que
quieras que haga y darle
las órdenes de una en
una.
• Normalmente, cuando la
placa acaba su lista de
órdenes, vuelve a
empezar de nuevo,
repitiendo su
programación una y otra
vez.
Los sensores
Un sensor no es más que un
componente electrónico que transmite
más o menos electricidad en función
de un elemento físico, como la luz, el
sonido, la distancia, etc. Si queremos
conectar un sensor a nuestra placa,
tendremos que averiguar primero si el
sensor es digital o analógico.
EL SENSOR DIGITAL
Un sensor digital solo puede tener dos
valores: 1 o 0, todo o nada. Un ejemplo
de sensor digital es un pulsador, en el
que cuando pulsamos el botón éste
vale 1, y cuando no lo pulsamos 0. En
una placa ZUM o similar, los sensores
digitales irán conectados en los pines
digitales D0-D13.
IMPORTANTE: Los pines digitales 0-
>RX y 1->TX se usan para recibir y
enviar información, por lo que, si les
conectas un sensor o actuador y
programas la placa, puede que el
programa no se cargue o no funcione
correctamente. Además, el pin D13,
debido a la existencia del LED D13, no
recibe la misma tensión, por lo que
puede darte problemas en el uso de
algunos elementos. Usa con
precaución dichos pines.
EL SENSOR ANALÓGICO
Un sensor analógico puede tener
múltiples estados siendo capaz de
transformar la cantidad de luz,
temperatura u otros elementos físicos
en un valor comprendido entre 0 y
1023. Un ejemplo de sensor analógico
es un sensor de luz, donde
dependiendo de la cantidad de luz que

4
el sensor recibe dará un valor mayor o
menor.
Los actuadores
Un actuador es un componente
electrónico capaz de realizar una
acción sobre el entorno. Por ejemplo,
un motor que mueve una rueda, un
LED que indica que un aparato está
encendido, un altavoz que emite un
sonido de alerta, etc.
Todos los actuadores que utilicemos
irán conectados a un pin digital. Hay
actuadores, como un LED, que solo
tienen dos estados, mientras otros
como un servomotor, pueden tener
múltiples posiciones y por tanto ser
analógicos. Para este tipo de
actuadores nuestra placa, que es
digital, se servirá de un truco o método
conocido como señal PWM. De
momento no te preocupes por ella,
veremos su utilidad más adelante.
Existen múltiples variantes del Arduino. En este caso, usaremos el Arduino UNO que es el más común.
Potencia - USB (1) / Conector de Adaptador (2)
Cada placa Arduino necesita una forma de estar alimentado eléctricamente. Esta puede ser alimentado desde un cable USB que viene de su ordenador o un cable de corriente eléctrica con su respectivo adaptador. La conexión USB es también cómo va a cargar código en su placa Arduino.
NO utilice una fuente de alimentación superior a 20 voltios, ya que se puede dañar la placa Arduino. La tensión recomendada para la mayoría de los modelos de Arduino es de entre 6 y 12 voltios.
Pines (5V, 3.3V, GND, Analog, Digital, PWM, AREF)
Los pines en la placa Arduino es donde se conectan los cables de un circuito. El Arduino tiene varios tipos diferentes de entradas, cada uno de las cuales está marcado en el tablero y utilizan para diferentes funciones:
5
• GND (3): Abreviatura de "tierra" (en Ingles). Hay varios pines GND en el Arduino, cualquiera de los cuales pueden ser utilizados para conectar a tierra el circuito.
• 5V (4) y 3.3V (5): Son los suministros pin 5V 5 voltios de energía, y los suministros de pin 3.3V 3.3 voltios de potencia.
• Analógico (6): El área de pines en el marco del 'analógica' etiqueta (A0 a A5) son analógicas. Estos pines pueden leer la señal de un sensor analógico (como un sensor de temperatura) y convertirlo en un valor digital que podemos leer.
• Digital (7): Son los pines digitales (del 0 al 13). Estos pines se pueden utilizar tanto para la entrada digital (como decir, si se oprime un botón) y salida digital (como encender un LED).
• PWM (8): Usted puede haber notado la tilde (~) al lado de algunos de los pines digitales (3, 5, 6, 9, 10 y 11). Estos pines actúan como pines digitales normales, pero también se pueden usar para algo llamado Modulación por ancho de pulsos (PWM, por sus siglas en Ingles).
• AREF (9): Soportes de referencia analógica. La mayoría de las veces se puede dejar este pin solo. A veces se utiliza para establecer una tensión de referencia externa (entre 0 y 5 voltios) como el límite superior para los pines de entrada analógica.
Botón de reinicio (10)
Empujando este botón se conectará temporalmente el pin de reset a tierra
y reinicie cualquier código que se carga en el Arduino. Esto puede ser muy útil si el código no se repite, pero quiere probarlo varias veces.
Indicador LED de alimentación (11)
Este LED debe encenderse cada vez que conecte la placa Arduino a una toma eléctrica. Si esta luz no se enciende, hay una buena probabilidad de que algo anda mal.
LEDs RX TX (12)
TX es la abreviatura de transmisión, RX es la abreviatura de recibir. Estas marcas aparecen un poco en la electrónica para indicar los pasadores responsables de la comunicación en serie. En nuestro caso, hay dos lugares en la Arduino UNO donde aparecen TX y RX - una vez por pines digitales 0 y 1, y por segunda vez junto a los indicadores LED de TX y RX (12). Estos LEDs nos darán algunas buenas indicaciones visuales siempre nuestro Arduino está recibiendo o transmitiendo datos (como cuando nos estamos cargando un nuevo programa en el tablero).
Microcontrolador (13)
Lo negro con todas las patas de metal es un circuito integrado (IC, por sus siglas en Ingles). Piense en ello como el cerebro de nuestro Arduino. La principal IC en el Arduino es ligeramente diferente del tipo de placa a placa tipo, pero es por lo general de la línea de ATmega de CI de la empresa ATMEL. Esto puede ser importante, ya que puede necesitar para saber el tipo de IC (junto con su tipo de tarjeta) antes de cargar un

6
nuevo programa desde el software de Arduino. Esta información se puede encontrar en la escritura en la parte superior de la IC. Si quieres saber más acerca de la diferencia entre diversos circuitos integrados, la lectura de las hojas de datos suele ser una buena idea.
Regulador de Voltaje (14)
Esto no es realmente algo que se puede (o debe) interactuar con el Arduino. Pero es potencialmente útil para saber que está ahí y para qué sirve. El regulador de voltaje hace exactamente lo que dice - que controla la cantidad de tensión que se deja en la placa Arduino. Piense en ello como una especie de guardián; se dará la espalda a una tensión adicional que podría dañar el circuito. Por supuesto, tiene sus límites, por lo que no conecta tu Arduino a nada superior a 20 voltios.
Actividades
1. Luego de leer la guía 1 estarás en capacidad de construir un mapa cognitivo tipo sol. Utiliza el enlace de referencia para que conozcas como se realiza la técnica. (nota de apreciación) Valor: 40 puntos
http://prepajocotepec.sems.udg.mx/sites/default/files/estrategias_pimiento_0.pdf
2. Escribe un ensayo sobre los Componentes de un robot. El mismo deberá tenerlas siguientes características:
a) La estructura del ensayo es libre; sin embargo, debe cubrir tres aspectos (no
necesariamente en el orden en que se indica):
• Introducción • Desarrollo • Conclusiones
b) Redacción libre.
c) Trata un solo tema.
d) Tiene forma sintáctica.
e) Su extensión es relativamente breve.
f) Variedad temática.
g) Estilo cuidadoso y elegante (sin llegar a la extravagancia).
h) Tono variado (profundo, poético, didáctico, satírico, etcétera).
i) Ameno en la exposición
(Nota de diaria) Valor: 40 puntos
7
Guía 2: Interfaz
Objetivo de Aprendizaje:
➢ Identifica la interfaz de usuario, el firmware, los menús, que son elementos
importantes en el manejo de un robot, tomando conciencia de la importancia de estos para entrar a desarrollar la lógica del dispositivo robótico.
Indicadores de logros:
-Enuncia con exactitud y verbalmente su comprensión sobre el software de programación, la interfaz de usuario y los menús, requeridos al momento de trabajar con un sistema robótico.
Lectura 2: ¿Qué es un Simulador? Un simulador es un dispositivo, por lo general informático, que permite la
reproducción de un sistema. Los simuladores reproducen sensaciones y
experiencias que en la realidad pueden llegar a suceder. Un simulador pretende
reproducir tanto las sensaciones físicas (velocidad, aceleración, percepción del
entorno) como el comportamiento de los equipos de la máquina que se pretende
simular. Para simular las sensaciones físicas se puede recurrir a complejos
mecanismos de movimiento accionados por sistemas hidráulicos y/o eléctricos
comandados por potentes ordenadores que mediante modelos matemáticos
consiguen reproducir Variables dinámicas de movimiento que permiten generar
sensaciones de velocidad y aceleración. Para reproducir el entorno exterior se
emplean proyecciones de bases de datos de terreno. A este entorno se le conoce
como "entorno sintético", Para simular el comportamiento de los equipos de la
máquina simulada se puede recurrir a varias técnicas. Se puede elaborar un modelo
de cada equipo y virtual izarlo por hardware con el equipo real o bien se puede
utilizar el mismo software que corre en el equipo real pero haciéndolo correr en un
ordenador más convencional (y por lo tanto más barato). A esta última opción se la
conoce como "software rehosteado". Mucho de estos simuladores requiere que se
les programa cada comportamiento y la acción a realizar para ello se utiliza API
interfaz de programación de aplicaciones. Las API permiten que sus productos y
servicios se comuniquen con otros, sin necesidad de saber cómo están
implementados.

8
Que es el IDE de Arduino IDE – entorno de desarrollo integrado, llamado IDE (sigla en inglés de integrated development environment), es un programa informático compuesto por un conjunto de herramientas de programación. Puede dedicarse en exclusiva a un solo lenguaje de programación o bien puede utilizarse para varios.
Un IDE es un entorno de programación que ha sido empaquetado como un programa de aplicación; es decir, que consiste en un editor de código, un compilador, un depurador y un constructor de interfaz gráfica (GUI). Además, en el caso de Arduino incorpora las herramientas para cargar el programa ya compilado en la memoria flash del hardware.
Los programas de Arduino están compuestos por un solo fichero con extensión “ino”, aunque es posible organizarlo en varios ficheros. El fichero principal siempre debe estar en una carpeta con el mismo nombre que el fichero.
Es importante conocer cada uno de los menús y opciones que tiene, pero los más importantes por ahora son:
• Botones de Verificar y Subir • Botón Monitor Serie • Consola de Error • Menú herramientas Placa y Puerto • Menú de pestañas

9
• Puerto y placa seleccionada • Menú preferencias • Proyecto/Sketch
Configuración inicial del IDE
Después de la instalación, lo primero es configurar el IDE para facilitar la edición de nuestros programas, que nos muestre toda la información de compilación y subida de programas a Arduino y que nos muestre por pantalla todos los warnings del compilador. Cuanta más información tengamos, más fácil será localizar un problema.
Para ello, entrar en el menú Archivo → preferencias y activar:
• Números de Línea • Mostrar salida detallada en la compilación y al subir un sketch • Configurar la ruta de nuestro workspace • Advertencia del compilador: Todos • Asociar extensión. ino a nuestro IDE • Habilitar plegado de código • Verificar el código después de subir
Desde esta pantalla configuramos donde se guardan las preferencias, sketches y librerías, de forma que al instalar una actualización mantenemos todos los datos o si instalamos varios IDEs van a compartir estos datos.
• Los sketches y librerías se guardan en C:\Users\nombre_usuario\Documentos\Arduino
• Las preferencias se guardan en el directorio: C:\Users\nombre_usuario\AppData\Local\Arduino15\, aquí también está el listado de librerías y placas disponibles desde el gestor de librerías y tarjetas.
NOTA: Guardar en el directorio de “Localización de Proyecto” la carpeta con las prácticas, de esta manera estarán disponibles directamente desde el IDE de Arduino.
Cargar un Programa en Arduino
El IDE de Arduino contiene un editor de texto para escribir nuestro sketch, una consola de error y un área con los menús y los botones que realizan las funciones más comunes como son abrir sketch, guardar sketch, compilar y cargar programa.
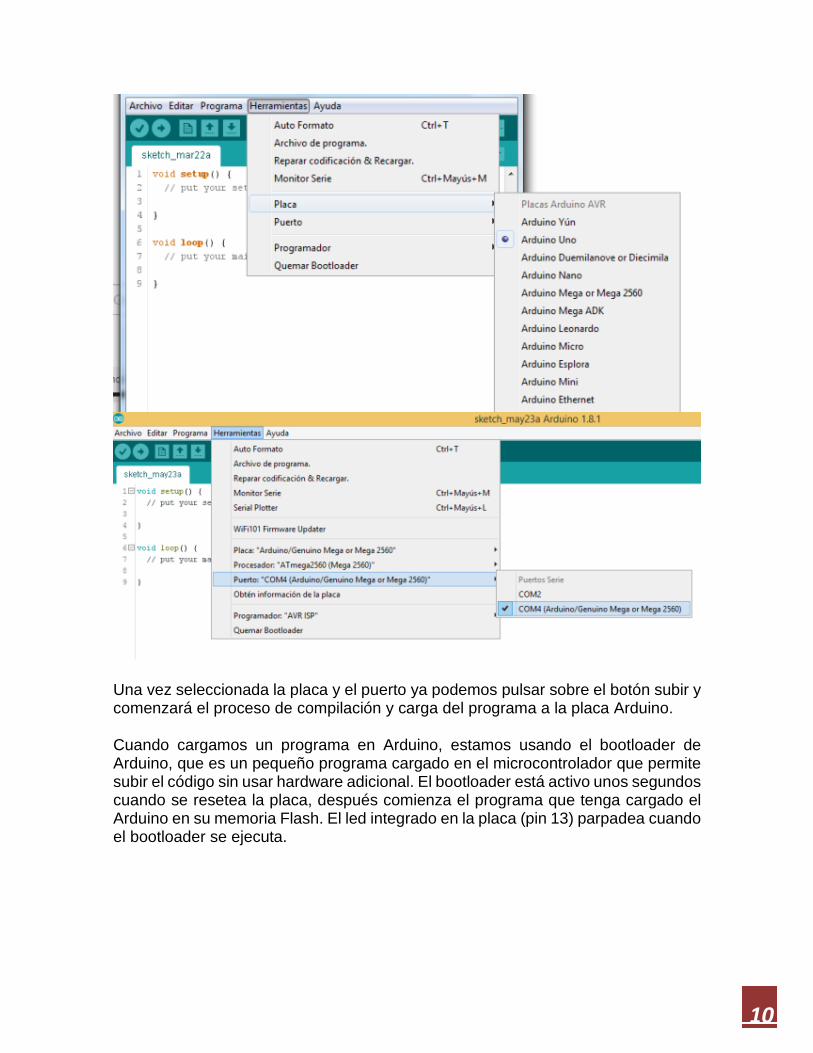
A la hora de cargar un programa en Arduino, debemos seleccionar siempre el modelo de la placa conectada y el puerto al que está conectado.
10
Una vez seleccionada la placa y el puerto ya podemos pulsar sobre el botón subir y comenzará el proceso de compilación y carga del programa a la placa Arduino.
Cuando cargamos un programa en Arduino, estamos usando el bootloader de Arduino, que es un pequeño programa cargado en el microcontrolador que permite subir el código sin usar hardware adicional. El bootloader está activo unos segundos cuando se resetea la placa, después comienza el programa que tenga cargado el Arduino en su memoria Flash. El led integrado en la placa (pin 13) parpadea cuando el bootloader se ejecuta.

11
Los lenguajes que soporta, entre otros, son: • Eclipse. • Emacs Lisp. • GNU Emacs. • IntelliJ IDEA. • MonoDevelop. • MyEclipse. • NetBeans. • Perl. • PHP. • Python. • Ruby.
Actividades
1. Luego de leer la guía 2 estarás en capacidad de construir un cuadro sinóptico con las siguientes características:
a) Se identifican los conceptos generales o inclusivos.
b) Se derivan los conceptos secundarios o subordinados.
c) Se categorizan los conceptos estableciendo relaciones de jerarquía.
d) Se utilizan llaves para señalar las relaciones
(nota de apreciación) Valor: 40 puntos
2. Investigaras otras placas programables que se venden en el mercado para el aprendizaje de la robótica ejemplo makeblock, lego EV3, raspberry pi, microbit, Arduino compara las características de esta.
Sigue estos pasos para realizar el cuadro comparativo:
a) Se identifican los elementos que se desea comparar.
b) Se marcan los parámetros a comparar.
c) Se identifican y escriben las características de cada objeto o evento.
d) Se enuncian afirmaciones donde se mencionen las semejanzas y diferencias más
relevantes de los elementos comparados.
(Nota de diaria) Valor: 40 puntos

12
Guía 3: Paleta de programación Objetivo de Aprendizaje:
➢ Identifica la interfaz de usuario, el firmware, los menús, que son elementos importantes en el manejo de un robot, tomando conciencia de la importancia de estos para entrar a desarrollar la lógica del dispositivo robótico.
Indicadores de logros:
-Enuncia con exactitud y verbalmente su comprensión sobre el software de programación, la interfaz de usuario y los menús, requeridos al momento de trabajar con un sistema robótico.
Lectura 3: Paleta de programación 3.1 Sketch de programación Arduino.
Un programa de Arduino se denomina sketch o proyecto y tiene la
extensión. ino. Importante: para que funcione el sketch, el nombre del
fichero debe estar en un directorio con el mismo nombre que el sketch.
Estructura básica de un sketch de Arduino:
1
2
3
4
5
6
7
8
9
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
La estructura básica de un sketch de Arduino es bastante simple y se

13
compone de al menos dos partes. Estas dos partes son obligatorias y
encierran bloques que contienen declaraciones, estamentos o instrucciones.
setup() es la parte encargada de recoger la configuración y loop() es la
que contiene el programa que se ejecuta cíclicamente (de ahí el término
loop –bucle-). Ambas funciones son necesarias para que el programa
trabaje.
La función de configuración (setup) debe contener la inicialización de los
elementos y esta función sólo se ejecuta una vez justo después de hacer el
reset y no se vuelve a ejecutar hasta que no haya otro reset. Es la primera
función para ejecutar en el programa y se utiliza para configurar, inicializar
variables, comenzar a usar librerías, etc…
La función bucle (loop) contiene el código que se ejecutará continuamente
(lectura de entradas, activación de salidas, etc). Esta función es el núcleo de
todos los programas de Arduino y se usa para el control activo de la placa.
La función loop se ejecuta justo después de setup.
ELEMENTOS DE SINTAXIS:
“;” (punto y coma).- El punto y coma es uno de los símbolos más usados en
c, c++; y se usa con el fin de indicar el final de una línea de instrucción.
“{}” (llaves).- Las llaves sirven para definir el principio y el final de un
bloque de instrucciones. Se utilizan para los bloques de programación
setup(),loop(),if,,etc.
“/*….*/” Bloque de comentarios: Son áreas de texto que pueden abarcar
más de una línea, lo que escribamos entre esos símbolos será ignorado por
el programa.
// Línea de Comentarios: Funciona como el bloque de comentario, con la
diferencia que solo será ignorado el texto que este a su derecha al cambiar
de línea perderá el efecto.
#define: permite al programador dar un nombre a un valor constante antes

14
de compilar el programa. Constantes definidas en Arduino no ocupan
espacio en el chip. El compilador de reemplazar las referencias a estas
constantes con el valor definido en tiempo de compilación.
3.2 Funciones básicas de la Programación con Arduino.
FUNCIONES BASICAS
3.1.1 E/S digitales
pinMode(pin,modo)
Configura el pin especificado para comportarse como una entrada
(INPUT) o una salida (OUTPUT).
Ejm: pinMode(Pin13, OUTPUT)
digitalWrite(pin,valor)
Asigna el valor HIGH (5V) o LOW (0V) a un pin digital.
Ejm: digitalWrite(Pin13 , HIGH);
digitalRead(pin)
Lee el valor de un pin digital especificado, HIGH o LOW.
Ejm: val = digitalRead(Pin13);
3.1.2 E/S Analógicas
analogRead(pin)
Lee el valor de tensión en el pin analógico especificado. La placa Arduino
posee 6 canales conectados a un conversor analógico digital de 10 bits. Esto
significa que convertirá tensiones entre 0 y 5 voltios a un número entero
entre 0 y 1023. Esto proporciona una resolución en la lectura de: 5 voltios /
1024 unidades, es decir, 0.0049 voltios (4.9mV) por unidad. El rango de
entrada puede ser cambiado usando la función analogReference().
analogWrite(pin,valor)
15
Escribe un valor analógico (PWM) en un pin. Puede ser usado para
controlar la luminosidad de un LED o la velocidad de un motor. Después de
llamar a la función analogWrite(), el pin generará una onda cuadrada estable
con el ciclo de trabajo especificado hasta que se vuelva a llamar a la función
analogWrite() (o una llamada a las funciones digitalRead() o digitalWrite()
en el mismo pin). La frecuencia de la señal PWM será de aproximadamente
490 Hz. los valores de analogRead van desde 0 a 1023 y los valores de
analogWrite van desde 0 a 255 parámetros: pin: Es el pin en el cual se
quiere generar la señal PWM. valor: El ciclo de trabajo deseado
comprendido entre 0 (siempre apagado) y 255 (siempre encendido). Ejm:
val = analogRead(analogPin);
analogWrite(ledPin, val / 4);
Ejm: val = analogRead(Pin3)
Actividad:
(Nota de diaria) Valor: 40 puntos
Llene los espacios con la respuesta correcta.
1.Al programa en Arduino se le denomina ___________________________ y usa
la extensión ____________.
2. Estructura básica del Arduino está formada por _________ y _________.
3. El lenguaje de programación utilizado con Arduino es _________________.
4. La función loop contiene el código que se ejecutara: ___________________.
5. Funciones básicas de Entradas/salidas digitales son: ________________,
_____________________________, ______________________________.
6. La siguiente instrucción indica pinMode(8, INPUT) que el pin 8 es de
___________________________.
7. Instrucciones utilizados con los pines analógicos para leer y asignarle
valores a los pines. _____________________________________,
_________________________________________.
16
8. Rango de valores para los pines digitales son (5V) ______ y
(0V)_________.
9. Convertirá tensiones entre 0 y 5 voltios a un número de valores para los
pines analógicos están entre ______y ______.
10.Instrucciones utilizada para leer y asignar valores a los pines digitales.
__________________________
__________________________.
Programación. Realice en programa con Arduino para el siguiente enunciado.
Conocer órdenes como: pinMode, digitalWrite y delay.
1. Encendido de leds secuencialmente.
Objetivo:
✓ Repasar declaración de variables tipo lista de valores.
✓ Repasar órdenes de control de programa como: for.
Se trata de encender y apagar 7 leds secuencialmente. Los leds deben estar
conectados a los pines 5,6,7,8,9,10 y 11. Se deben encender y apagar los leds
desde el pin 5 al 11, con un tiempo de encendido y apagado de 50 ms, más tarde
se deben encender y apagar los leds desde el pin 11 al 5, con un tiempo de
encendido y apagado de 50 ms. La secuencia se debe repetir indefinidamente.
Escribe el código.

17
Portafolio de Evidencias (Examen Trimestral)
Formato para entrega de Portafolio de Evidencias
Portada
Índice
Introducción
I. Actividades Guía 1 a. Diagrama sol b. Ensayo
II. Actividades Guía 2 a. Cuadro sinóptico b. Cuadro comparativo
III. Actividades Guía 3 a. Completar los espacios b. Programa codificado
IV. Resumen de la clase Componentes V. Resumen de la clase Interfaz
VI. Resumen de la clase Paleta de programación
Conclusión (qué aprendí, que recordé, qué se)


















![Taller Sistemas[1]](https://static.fdocuments.es/doc/165x107/5571f81849795991698ca070/taller-sistemas1.jpg)