Tarea7.pdf
7
Benemérita universidad Autónoma de Puebla, Control digital Diseño con lugar de las raíces Vidal Crispín Santiesteban, [email protected] Considere el caso que se muestra en la figura donde la planta a controlar tiene la función de transferencia () ( ) Se desea que se diseñe el sistema de control tal que: Error en estado estacionario ante una rampa unitaria de 4% El sobreimpulso ante un escalón unitario de 7% Tiempo de estabilización de 0.8s I. CALCULO DE ERROR EN ESTADO ESTACIONARIO El error en estado estacionario se calcula como Donde se expresa () ( ( ) ) Por lo que el error es estado estacionario es
-
Upload
vidal-crispin-santiesteban -
Category
Documents
-
view
215 -
download
2
Transcript of Tarea7.pdf

Benemérita universidad Autónoma de Puebla, Control digital
Diseño con lugar de las raíces
Vidal Crispín Santiesteban, [email protected]
Considere el caso que se muestra en la figura donde la planta a controlar tiene la función de
transferencia
( )
( )
Se desea que se diseñe el sistema de control tal que:
Error en estado estacionario ante una rampa unitaria de 4%
El sobreimpulso ante un escalón unitario de 7%
Tiempo de estabilización de 0.8s
I. CALCULO DE ERROR EN ESTADO ESTACIONARIO
El error en estado estacionario se calcula como
Donde se expresa
( )
(
( ))
Por lo que el error es estado estacionario es

Benemérita universidad Autónoma de Puebla, Control digital
II. SOBREIMPULSO ANTE UN ESCALON UNITARIO DEL 7%
La ecuación característica del sistema se define como
( )
Representamos la ecuación forma estándar
El tiempo de asentamiento corresponde a
( )( )
El sistema tiene un sobre impulso
( )
√ ( )
Necesitamos un sobreimpulso al 7%, por tanto necesitamos encontrar el factor de
amortiguamiento relativo que cumpla la ecuación.
√
Aplicando logaritmo natural en ambos lados
√
La exponencial se elimina con el logaritmo con lo cual obtenemos la expresión
√
Sustituyendo el factor de amortiguamiento relativo
√
( ) ( ) ( )
( ) ( ) ( )
( ( ) ) ( )

Benemérita universidad Autónoma de Puebla, Control digital
√ ( )
( )
Los polos se ubican en
√
III. FASE DE LA FUNCION EN LAZO ABIERTO
Mediante técnicas de control tradicional se usara un compensador de avance de fase.
Veamos cuánto vale la función de transferencia de lazo abierto el polo deseado:
( ) ( )
( )( )
( )( )
Convirtiendo a grados
No pertenece al lugar de las raíces porque no es múltiplo impar de para compensar el
sistema, insertamos un compensador de fase que se suma a al sistema sin compensar.
( ) ( ) ( ) ( )
El compensador debe de contribuir a la fase con
( )
Por lo tanto el compensador debe aportar a la fase en con
IV. CALCULO DE COMPENSADOR DE ADELANTO
Hay muchas formas para determinar el polo y el cero del compensador. A continuación se
presenta un procedimiento con el propósito de obtener el mayor valor posible . Primero
dibuje una línea que pase por el punto P, localización deseada para uno de los polos
dominantes en lazo cerrado. Dibuje una línea horizontal

Benemérita universidad Autónoma de Puebla, Control digital
Hay muchas formas de determinar la localización del cero y del polo del compensador de
adelanto. A continuación se presenta un procedimiento con el propósito de obtener el
mayor valor posible para . Primero dibuje una línea horizontal que pase por el punto P,
localización deseada para uno de los polos dominantes en lazo cerrado. Esto corresponde a
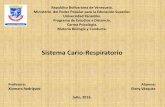
la línea PA de la Figura 1. Dibuje una línea que conecte el punto P con el origen.
Biseccione el ángulo que forman las líneas PA y PO, como se muestra en la citada figura.
Dibuje dos líneas PC y PD que formen ángulos de
con la bisectriz PB. Las intersecciones
de PC y PD con el eje real negativo proporcionan la localización necesaria para el polo y el
cero de la red de adelanto. Por tanto, el compensador diseñado hará de P un punto sobre el
lugar de las raíces del sistema compensado. La ganancia en lazo abierto se determina
mediante la condición de magnitud. 1
En el sistema actual, el ángulo de G(s) del polo en lazo cerrado deseado es
Cuando biseccionamos el ángulo APO y tomamos a cada lado, tenemos la
localización del polo y el cero como se muestra
𝐶𝑒𝑟𝑜 𝑒𝑛 𝑠
𝑃𝑜𝑙𝑜 𝑒𝑛 𝑠
Así 𝐺𝑐(𝑠) se expresa como:
1 Ogata, Ingeniera de control moderna
P
A
C
B
D
O
Figura 1. Determinacion de polo y de cero de compensador de adelanto

Benemérita universidad Autónoma de Puebla, Control digital
𝐺𝑐(𝑠)
𝑠
𝑠
Verifiquemos la condición de fase del sistema
𝐺𝐶(𝑠) 𝐺(𝑠)𝐻(𝑠) (
𝑖
( 𝑖)( 𝑖 )
𝑖
Ya pertenece al lugar de las raíces
Para que 𝑠 y su conjugado sean polos d lazo cerrado debe de satisfacer la condición de
magnitud
𝐺𝑐(𝑠)𝐺(𝑠)𝐻(𝑠)
𝑖
𝑖
( 𝑖)( 𝑖 )
No satisface la condición de magnitud, por tanto tendríamos que bajar la ganancia
aproximadamente a la mitad para acercase a la magnitud de 1.
Pero no podemos bajar la ganancia por que se desajusta el error en estado estacionario.
Para evitar esto insertamos un compensador de atraso que simule bajar la ganancia.
V. CALCULO DE COMPENSADOR DE ATRASO
La función de transferencia del compensador de atraso de expresa como se muestra en la
ecuación
( )
Para satisfacer la condición de magnitud, sabemos que la ganancia se debe bajar en un
factor de
665. en términos de bode equivale a sumar
(
)

Benemérita universidad Autónoma de Puebla, Control digital
Entonces
Ahora, si T es lo suficientemente grande
( )
Propongamos , Con esto la función de transferencia del compensador queda como:
( )
VI. SISTEMA COMPENSADO
El sistema de compensado de adelanto-atraso de fase queda entonces como
( ) ( )𝐺(𝑠)𝐻(𝑠)
𝑠
𝑠
( )
( ) ( )𝐺(𝑠)𝐻(𝑠) 𝑠 𝑠
𝑠4 𝑠3 𝑠 𝑠
Corroboremos si satisface la condición de fase y magnitud. La fase del sistema
compensado Adelanto-atraso se obtiene
𝐺𝐶(𝑠) 𝐺(𝑠)𝐻(𝑠) ( )
𝜋 (
𝑖
( 𝑖)( 𝑖 )
( 𝑖 )
( 𝑖 )
𝑖
Es un valor muy cercano a , por lo que satisface la condición de ángulo
Ahora corroboremos si satisface la condición magnitud.
𝐺𝑐(𝑠)𝐺(𝑠)𝐻(𝑠 ( ))
𝑖
𝑖
( 𝑖)( 𝑖 )
( 𝑖 )
( 𝑖 )
𝐺𝑐(𝑠)𝐺(𝑠)𝐻(𝑠 ( ))
Por lo tanto satisface la condición de magnitud. Solo nos queda verificar si el error
estacionario no ha cambiado su valor

Benemérita universidad Autónoma de Puebla, Control digital
𝐺𝑐(𝑠)𝐺(𝑠)𝐻(𝑠 ( )
()
𝑠
𝑠
(𝑠)(𝑠 )
)
𝑠