Tema 01 - Geometría Análitica en El Espacio
29
Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I.1 TEMA I: GEOMETRÍA ANALÍTICA EN EL ESPACIO I.1 BREVE REPASO DE VECTORES . Se supone que el estudiante conoce el concepto de espacio vectorial, y por consiguiente las propiedades de los vectores, estudiadas en el curso de Álgebra Lineal. Durante el desarrollo de este tema se tratarán los vectores en forma elemental, asociándolos a un segmento dirigido (flecha), y referidos a una base ortonormal tridimensional. Un vector en un espacio de tres dimensiones queda así determinado por una terna ordenada de números reales, los que llamaremos sus componentes. I.1.1 Representación geométrica de los vectores Interpretemos geométricamente el significado de un vector en el espacio tridimensional, para lo cual consideremos una terna de ejes rectilíneos y mutuamente ortogonales que se corten en un punto “ O ”, y si sobre cada uno de estos ejes se elige un sentido como positivo y una unidad de medida, tenemos entonces definido un sistema de referencia cartesiano ortogonal. Llamamos a estos ejes z , y , x y están orientados de tal manera que al llevar a coincidir el eje x sobre el eje y (recorriendo el ángulo menor entre ellos) un tirabuzón ubicado en el origen penetrará en la dirección elegida como positiva para el eje z (figura 1). Este sistema se denomina dextrógiro. Si el sentido es el opuesto, el sistema se denomina levógiro. Dado un vector ( ) 3 2 1 a , a , a a = , lo represen- taremos con una flecha con origen en un punto P cualquiera del espacio, y tal que su extremo sea el punto Q obtenido de la siguiente manera: partiendo del punto P se toma 1 a en sentido positivo sobre el eje x , si 1 a es un número positivo, y en sentido contrario si fuera negativo; igualmente se procede con las otras dos componentes según los ejes y y z . x y z Q P a1 a2 a3 a O Figura 2 x y z O Figura 1
-
Upload
leotramontin -
Category
Documents
-
view
243 -
download
0
description
Geometría Análitica en El Espacio
Transcript of Tema 01 - Geometría Análitica en El Espacio

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I.1
TEMA I: GEOMETRÍA ANALÍTICA EN EL ESPACIO
I.1 BREVE REPASO DE VECTORES.
Se supone que el estudiante conoce el concepto de espacio vectorial, y por consiguiente
las propiedades de los vectores, estudiadas en el curso de Álgebra Lineal.
Durante el desarrollo de este tema se tratarán los vectores en forma elemental, asociándolos
a un segmento dirigido (flecha), y referidos a una base ortonormal tridimensional. Un vector
en un espacio de tres dimensiones queda así determinado por una terna ordenada de
números reales, los que llamaremos sus componentes.
I.1.1 Representación geométrica de los vectores
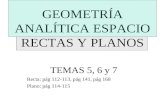
Interpretemos geométricamente el significado de un vector en el espacio tridimensional,
para lo cual consideremos una terna de ejes rectilíneos y mutuamente ortogonales que se
corten en un punto “ O ”, y si sobre cada uno de estos ejes se elige un sentido como positivo
y una unidad de medida, tenemos entonces
definido un sistema de referencia cartesiano
ortogonal. Llamamos a estos ejes z,y,x y están
orientados de tal manera que al llevar a coincidir
el eje x sobre el eje y (recorriendo el ángulo
menor entre ellos) un tirabuzón ubicado en el
origen penetrará en la dirección elegida como
positiva para el eje z (figura 1). Este sistema se
denomina dextrógiro. Si el sentido es el opuesto,
el sistema se denomina levógiro.
Dado un vector ( )321 a,a,aa = , lo represen-
taremos con una flecha con origen en un
punto P cualquiera del espacio, y tal que su
extremo sea el punto Q obtenido de la
siguiente manera: partiendo del punto P se
toma 1a en sentido positivo sobre el eje x , si
1a es un número positivo, y en sentido
contrario si fuera negativo; igualmente se
procede con las otras dos componentes
según los ejes y y z .
x
y
z
Q
P a1
a2
a3
a
O
Figura 2
x
y
z
O
Figura 1

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I.2
La flecha PQ , en la figura 2, representa al vector libre a , pero como las componentes del
vector coinciden con las coordenadas del punto extremo del vector, hace falta ubicar el
comienzo del vector en el origen. Si el vector está ubicado en cualquier punto P del
espacio, hace falta indicar las coordenadas de este punto además de las componentes del
vector. Un vector ( )z,y,x ligado al origen, determina la posición de un punto, por esto se lo
llama vector posición.
La suma de los vectores se interpreta ahora
como la suma de las "flechas" que representan
dichos vectores (figura 3), la suma de los
vectores a y b es el vector ba + obtenido
colocando el comienzo del vector b en el
punto terminal de a y entonces el vector que
tiene por punto inicial el comienzo de a y por
punto terminal el extremo de b , representa al
vector suma.
I.1.2 Longitud de un vector o norma euclídea
Aplicando el teorema de Pitágoras para obtener la distancia entre los puntos P y Q , origen
y fin de la flecha asignada al vector, se obtiene: 2 2 2
1 2 3PQ a a a= + +
La longitud del vector se llama norma euclídea o módulo del vector, y se la indica: a .
I.1.3 Producto escalar, producto vectorial y producto mixto
Producto escalar. Llamamos producto escalar entre dos vectores a y b y lo indicamos:
ba ⋅ al número real que se obtiene sumando los productos de las componentes homólogas
de los vectores dados:
332211 b a b a baba ++=⋅
Se dice que dos vectores son ortogonales si su producto escalar es nulo. El vector nulo
(todas sus componentes son cero) es ortogonal a todos los vectores del espacio.
x
y
z
ba + b
a O
Figura 3

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I.3
Ejemplo 1
Efectuar el producto escalar entre los vectores: ( )232 −= ,,a y ( )215 ,,b −=
Solución
( ) ( ) 3 22-1352 =⋅+−⋅+⋅=⋅ ba
Ejemplo 2
Indicar si los vectores: ( )312 −= ,,a y ( )574 ,,b = son ortogonales
Solución
Haciendo el producto escalar se verifica que los vectores son ortogonales.
01578 =−+=⋅ ba
Aplicación geométrica del producto escalar. A partir de dos vectores no nulos y no paralelos
a y b , construimos un triángulo rectángulo, la
hipotenusa es a y su base es paralela al
vector b . La longitud de esta base es r b . Al
cateto restante lo denominamos c (figura 4).
a rb c= + (1)
Luego, de (1): cbra += multiplicando escalarmente por b en ambos miembros:
a b r b b c b⋅ = ⋅ + ⋅
como 0=⋅ bc , por ser ortogonales y 2
bbb =⋅ queda:
2brba =⋅
si llamamos ba a la componente del vector a en la dirección de b , y dividimos por b ,
obtenemos:
b
babrab⋅
== (2)
Si la componente de a en la dirección de b tiene el mismo sentido que el vector b , este
número resulta ser positivo, de lo contrario es negativo.
θ
a c
rb
b
Figura 4

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I.4
La proyección de a sobre b , la denotamos por bproy a y es el vector rb , esto es:
b
a bproy a bb b
⋅=
Considerando que:
ba a cos= θ con =θ ángulo entre los vectores a y b
obtenemos de (2):
b
bacosaab⋅
=θ=
luego, el producto escalar se expresa como:
a b a b⋅ = cos θ (3)
lo que confirma que si el producto escalar es nulo es porque uno o ambos vectores son
nulos, o el ángulo θ entre ellos es 90º.
De (3) puede determinarse el ángulo entre dos vectores:
cos θ =⋅a b
a b (4)
Cosenos directores
Los ángulos que el vector c determina con
los ejes coordenados reciben el nombre de
ángulos directores. Los cosenos de estos
ángulos pueden obtenerse mediante las
expresiones:
cos ;α =cc1 cos ;β =
cc2 cos ;γ =
cc3
Los cosenos directores del vector, tienen la importante propiedad que el vector formado por
estos cosenos directores es un versor en la dirección del vector dado, ( )γβα= cos,cos,cosuc
además 2 2 2 1cos cos cosα + β + γ = .
y
z
αγ
x
c1
β
c3
c2
c
Figura 5

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I.5
Producto vectorial: dados los vectores ( )321 a,a,aa = y ( )321 b,b,bb = el producto vectorial
entre ellos lo indicamos como a b× , y lo definimos como:
( )122131132332 baba,baba,bababa −−−=× (5)
Al conmutar los factores, se invierte el signo, esto es: abba ×−=× y el vector bac ×= es
ortogonal a a y a b , es decir: 0c a⋅ = y 0=⋅ bc .
Expresión del producto vectorial como determinante: El producto vectorial ba × , puede
obtenerse resolviendo el siguiente determinante:
1 2 3
1 2 3
ˆˆ ˆi j ka b a a a
b b b× = (6)
donde ˆˆ ˆi , j , k son los versores en la dirección de cada eje coordenado.
Norma del producto vectorial. Desarrollando el cuadrado de la norma del producto
vectorial a b× , tenemos:
( ) ( ) ( )2 2 2 2
2 3 3 2 3 1 1 3 1 2 2 1a b a b a b a b a b a b a b× = − + − + − =
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )2 2 2 2 2 22 3 2 3 3 2 3 2 3 1 3 1 1 3 1 3 1 2 1 2 2 1 2 12 2 2a b a b a b a b a b a b a b a b a b a b a b a b= − + + − + + − +
luego, sumando y restando ( ) ( ) ( )2 2 21 1 2 2 3 3a b a b a b+ + y reordenando, nos queda:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
2 2 2 2 2 2 2 2 21 1 1 2 1 3 2 1 2 2 2 3 3 1 3 2 3 3
2 2 21 1 1 2 2 1 2 3 3 2 2 2 3 1 1 3 3 32 2 2
a b a b a b a b a b a b a b a b a b a b
a b a b a b a b a b a b a b a b a b
× = + + + + + + + + −
− − − − − −
que se puede escribir como:
( ) ( ) ( )22 2 2 2 2 21 2 3 1 2 3 1 1 2 2 3 3a b a a a b b b a b a b a b× = + + + + − + + ( ) ( ) ( )22 2 2 2 2 2
1 2 3 1 2 3a a a b b b a b= + + + + − ⋅
usando (3), obtenemos:
( ) ( )22 2 22 2 22 21a b a b a b cos a b cos a b sen× = − θ = − θ = θ
por lo tanto: a b a b sen× = θ (7)
Interpretación geométrica: la norma del producto vectorial entre dos vectores es
numéricamente igual al área del paralelogramo formado entre los vectores dados.

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I.6
Área del paralelogramo: base altura
base altura a b sen a b× = θ = ×
El producto vectorial de dos vectores a y b , es un vector ortogonal al plano
determinado por a y b , cuya longitud es igual al producto de las longitudes de los
vectores dados por el seno del ángulo comprendido. Este vector tiene sentido positivo
en la dirección que se forma con a y b una terna dextrógira.
Ejemplo 3
Obtener el área del triángulo de vértices: ( ) ( ) ( )124023102 ,,C;,,B;,,A −−
Solución
El área del triángulo es igual a la mitad del área del rectángulo determinado por los vectores
AB y AC . Estos vectores se expresan:
AB = − − + =3 2 2 0 0 1 121, , , ,b g b g AC = − − − + = −4 2 2 0 1 1 2 2 2, , , ,b g b g
Área del triángulo = 12 AB AC×
el producto vectorial es: ( )1 2 1 6 0 62 2 2
ˆˆ ˆi j kAB AC , ,× = = −
−
y el área es:
Área del triángulo = 24347221 .=
Producto mixto: Se llama producto mixto o triple producto escalar de tres vectores al
producto escalar de uno de ellos por el producto vectorial de los otros dos:
cba ×⋅ (8)
El resultado es un número real, y puede obtenerse desarrollando el determinante:
321
321
321
cccbbbaaa
cba =×⋅
Figura 6
θ
a
b

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I.7
puesto que: ( ) ( )122131132332321 cbcb,cbcb,cbcb,a,a,acba −−−⋅=×⋅
321
321
321
21
213
31
312
32
321
cccbbbaaa
ccbb
accbb
accbb
a =+−=
A tener en cuenta:
cababcbcabacacbcba ×⋅−=×⋅−=×⋅−=×⋅=×⋅=×⋅
Interpretación geométrica
Consideremos el paralelepípedo que tiene por
aristas los vectores dados. Hagamos el producto
escalar entre el vector b c× y el vector a , esto es:
a b c a b c⋅ × = ×e j cos θ = altura . área de la base = volumen
Recordemos que a cos θ es la altura del paralelepípedo y b c× el área del
paralelogramo base. Como el signo del resultado puede ser negativo, en caso que el
vector a tenga una proyección negativa sobre el vector cb × , el volumen será:
( )volumen a b c a b c cos= ⋅ × = × θ
El volumen será nulo en el caso en que alguno de los vectores sea nulo, o si los tres vectores
están contenidos en un plano.
Ejemplo 4
Obtener el volumen del tetraedro de vértices:
( );,,A 531 ( );,,B 241 ( );,,C 312 − ( );,,D 114 −
Solución
El volumen del tetraedro es igual a la sexta parte del volumen del paralelepípedo formado
sobre los vectores determinados por los vértices del tetraedro.
Luego, formamos los vectores: AB AC AD= − = − − = − −01 3 1 4 2 3 2 6, , ; , , ; , ,b g b g b g
El volumen del tetraedro es: 5630
623241310
61Volumen =−=
−−−−−
=
a
c b
cb ×
θ
Figura 7

Cálculo Vectorial – Facultad de Ingeniería – Universidad Nacional de Río Cuarto I.8
I.2 ECUACIONES DE LA RECTA Y EL PLANO.
I.2.1 Ecuaciones de la recta
Una recta en el espacio queda determinada por dos puntos. Llamemos A y B a estos
puntos, los vectores posición respectivos son:
( )111 z,y,xa = y ( )222 z,y,xb =
La dirección de la recta en el espacio está dada
por el vector ab − (figura 8). Un punto cualquiera
( )z,y,xP , sobre la recta, está identificado por un
vector posición r , que se obtiene como la suma
del vector a o b y un múltiplo del vector dirección
ab − :
( )r a t b a= + − (9)
donde t es un parámetro variable.
Mientras varía t en forma continua, la punta del vector r describe una recta.
Puede ocurrir que estemos interesados en la
ecuación de una recta que pasa por el punto
( )0 0 0 0P x , y ,z (figura 9) y que tiene la dirección
del vector c .
Un punto ( )z,y,xP sobre la recta queda
determinado por el vector posición r tal que:
( ) ( ) ( )321000 c,c,ctz,y,xz,y,xr +== (10)
Las ecuaciones (9) y (10) se conocen como ecuaciones vectoriales de la recta.
Si igualamos las componentes respectivas en la ecuación (10):
0 1x x tc= + 0 2y y tc= + 0 3z z tc= + (11)
despejando t de cada una de las ecuaciones (11) e igualando:
z
y
r
x
A B
( )z,y,xP
O
ab −
a h
b
Figura 8
( )P x, y,z P0
c
r
z
x
y
O
Figura 9

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I. 9
0 0 0
1 2 3
x x y y z zc c c− − −
= = (12)
a la ecuación (12) la llamamos ecuación cartesiana o simétrica de la recta. Si uno o dos de
los ic en las ecuaciones (11) son nulos, no es posible obtener la ecuación cartesiana de la
recta. Si el vector c fuera por ejemplo: ( )31 0 c,,cc = , la ecuación (12) se transforma en:
3
0
1
0
czz
cxx −
=− ; 0yy =
Ejemplo 5
Hallar la ecuación vectorial y cartesiana de la recta que une los puntos: ( )312 −,,A y ( )201 −,,B
Solución
( ) ( ) ( )( ) ( )111312
321021312,,t,,r
,,t,,abtar−−+−=
+−−−+−=−+=
La ecuación cartesiana es: 1
311
12 +
=−−
=−− zyx
Ejemplo 6
Dar la ecuación de la recta paralela a la anterior y que pasa por el punto ( )415 ,,P − .
Solución
Para obtener una recta paralela a la anterior, sus vectores dirección deben ser
proporcionales y contener además al punto dado. Luego, la ecuación pedida será:
( ) ( )111415 ,,t,,r −−+−=
o en forma simétrica: 1
411
15 −
=−+
=−− zyx
I.2.2. Ecuaciones del plano
Al igual que para la ecuación de la recta, la ecuación del plano, puede determinarse de
diversas maneras.

Cálculo Vectorial – Facultad de Ingeniería – Universidad Nacional de Río Cuarto I.10
Sea π , un plano que contiene al punto
( )0 0 0 0P x , y ,z (figura 10) y es perpendicular a la
dirección del vector ( )321 n,n,nn = , y sea
( )P x, y,z un punto genérico del plano, luego
la ecuación cartesiana del plano se obtiene
resolviendo el producto escalar entre dos
vectores perpendiculares, uno de ellos el
vector normal al plano ( )1 2 3n n ,n ,n= y el otro
un vector dirección del plano 0P P r p= − , esto es:
( ) 0n r p⋅ − = (13)
desarrollando (13): ( ) ( ) ( )( )1 2 3 0 0 0 0n ,n ,n x, y,z x , y ,z⋅ − =
( ) ( ) ( )0 1 0 2 0 3 0x x n y y n z z n− + − + − =
1 2 3 1 0 2 0 3 0n x n y n z n x n y n z+ + = + +
1 2 3n x n y n z d+ + = (14)
La ecuación (14) se llama ecuación normal del plano o cartesiana.
Ejemplo 7
Dar la ecuación del plano normal al vector ( )243 −,, y que contiene al punto ( )231 ,,P −= .
Solución
De acuerdo con (14): ( ) ( ) ( ) 022341 3 zy x =−−++−
que desarrollada da: 013243 zyx =+−+
Ejemplo 8
Encontrar la ecuación del plano que pasa por ( )031 ,,P −= y es perpendicular a la recta
141
23 zyx
=−
=− .
Solución
Un vector perpendicular al plano es el vector ( )142 ,,n = , formado con los números directores
de la recta. La ecuación pedida será: ( ) ( ) ( ) 003412 =−+−++ zyx
o también: 1042 =++ zyx
x
P
n
Po
y
z
r p
pr −
O
Figura 10
π

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I. 11
Ejemplo 9
Ecuación del plano normal al segmento de la recta determinado por los puntos: (1,3,-2) =A ;
(2,-1,5) =B ; y que contiene al punto B .
Solución
Un vector perpendicular al plano será el vector AB : AB = + =2 - 1,-1 - 3,5 2 1,-4,7 b g b g
La ecuación del plano será: ( ) ( ) ( ) 0571421 z y x =−++−−
que se puede escribir como: 4174 z y x =+−
Ejemplo 10
¿Es el plano de ecuación - y - z x 1832 =+ , perpendicular a la recta 3
12
54
1 +=
−=
− zyx ?
Solución
Para que sean perpendiculares debe existir una proporcionalidad entre los coeficientes de
las variables del plano y los correspondientes números directores de la recta, esto es :
31
23
42 −
≠≠ , luego no son perpendiculares
Plano determinado por tres puntos no alineados
Un plano en el espacio también queda
determinado por tres puntos no alineados.
Sean C,B,A tres puntos no alineados que
determinan el plano π y sea ( )z,y,xP otro
punto que pertenecerá a este plano si el
volumen del paralelepípedo imaginario,
cuyas aristas son los vectores AB AP AC, , , es
nulo. Esto es si los vectores no forman un volumen por ser linealmente dependientes.
Calculamos este volumen usando el producto mixto:
( ) 0V AP AB AC= ⋅ × = (15)
si: ( ) ( ) ( ) ( )0 0 0 1 1 1 2 2 2; ;a x , y ,z b x , y ,z c x , y ,z ; r x, y,z= = = =
B
x
c P
C
A
z
y
a b
r
O
Figura 11

Cálculo Vectorial – Facultad de Ingeniería – Universidad Nacional de Río Cuarto I.12
Reemplazando en (15):
0
020202
010101
000
=−−−−−−−−−
=zzyyxxzzyyxxzzyyxx
V (16)
El desarrollo del determinante (16) nos dará la ecuación cartesiana del plano que contiene
a los tres puntos dados.
Finalmente si nos interesa la ecuación del plano que pasa por A y tiene por direcciones los
vectores c a− y b a− , la misma estará dada por:
( ) ( ) ( ) ( )0 0 0 2 0 2 0 2 0 1 0 1 0 1 0x, y,z x , y ,z t x x , y y ,z z s x x , y y ,z z= + − − − + − − − (17)
La ecuación anterior se llama ecuación vectorial del plano.
Ejemplo 11
Dar la ecuación de una recta que pase por el punto ( )311 ,,C y que sea perpendicular a la
recta ( ) ( ) ( )3 10 2 3 1 L : x, y,z , , t , ,= +
Solución
Siendo: =a ( )3 10, , , =b ( )2 3 1, , , =c ( )11 3, , y r un vector posición de la recta pedida.
El plano 2 3x y z d+ + = , es perpendicular a la recta dada y si pasa por el punto ( )311 ,,C ,
2 1 3 1 1 3 8d = ⋅ + ⋅ + ⋅ = , luego la intersección de la recta dada con este plano viene dada por:
( ) ( ) ( )0 0 02 3 2 3 1 3 8t t t+ + + + =
0 0 0 0 016 4 3 9 14 9 8
14t t t t t+ + + + = + = ⇒ = −
Entonces el vector posición del punto de intersección es:
( ) ( ) ( )1 20 11 13 10 2 3 114 7 14 14
x, y,z , , , , , , −⎛ ⎞= − = ⎜ ⎟⎝ ⎠
y la ecuación pedida es:
( ) 20 11 11 1 3 1 1 37 14 14
r , , s , ,⎛ ⎞= + − − − − −⎜ ⎟⎝ ⎠
( ) 13 3 431 1 37 14 14
r , , s , ,⎛ ⎞= + − −⎜ ⎟⎝ ⎠

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I. 13
Ejemplo 12
Hallar la ecuación de la recta perpendicular a las rectas 1 2yL L en el punto de intersección
de las mismas, siendo:
( ) ( ) ( )( ) ( ) ( )
1
2
2 3 0 10 11 3 1 2 3 0
L : x, y,z , , t , ,
L : x, y,z , , s , ,
= +
= − − +
Solución
La recta pedida debe ser perpendicular a cada una de las rectas dadas, esto es, debe ser
ortogonal al plano que ellas determinan:
( ) ( ) ( ) ( )1 2
2 3 0 10 1 2 3 0r p d d
x, y,z , , t , , s , ,= + +
luego, la ecuación de este plano será:
( ) ( )1
2
2 31 0 1 3 2 2 3 3 02 3 0
r p x y zd x y z
d
− − −= = − − + − + =
3 6x− + 2 6y+ − 3 0z+ =
3 2 3 0x y z− + + =
si ( )3 2 3n , ,= − es la normal al plano, será también la dirección de la recta a obtener.
Y el vector posición de la recta pedida, estará dado por la intersección de las dos rectas:
2 1 2 3 3 3 1 1 2t s , s, t t , s+ = − + = − + = ⇒ = =
( ) ( )3 3 1x, y,z , ,=
Luego, la ecuación de la recta pedida es: ( ) ( ) ( )3 3 1 3 2 3x, y,z , , m , ,= + −
Ejemplo 13
Encontrar el punto de intersección entre la recta ( ) ( )2 10 113r , , t , ,= + − y el plano 532 =−+ zyx .
Solución
Se tiene: ( ) ( ) ( )2 10 113x, y,z a t c , , t , ,= + = + − , entonces ( )012 ,,a = , ( )311 ,,c −= ,
en cuanto al plano, la normal viene dada por: ( )132 −= ,,n y un punto del plano es ( )500 −= ,,p
x
y
z
0r 1r
d
b 01 rr −
O

Cálculo Vectorial – Facultad de Ingeniería – Universidad Nacional de Río Cuarto I.14
El vector p es un punto cualquiera del plano, para obtenerlo se despeja de la ecuación del
plano una de las variables y se le asignan valores arbitrarios a las otras. En nuestro caso se
despejó z y se eligió 0=x , 0=y , obteniéndose 5−=z .
Luego, el punto de intersección vendrá dado por: ( ) ( ) ( )0 0 02 2 3 1 3 5t t t− + + − = , esto es:
( ) ( )( ) ( ) 1
132311132512
0 =−⋅−
−⋅−−−=
,,,,,,,,
t
y el vector posición del punto de intersección es:
( ) ( ) ( )32131110120 ,,,,,,r =−+=
Ejemplo 14
Dar la ecuación de la recta de intersección de los planos: 2 6x y z − + = ; 2 0x y z − − =
Solución
Los vectores normales a los planos son: ( )1211 ,,n −= y ( )1212 −−= ,,n
El vector dirección de la recta de intersección: ( )02421 ,,nnc =×=
Un punto que pertenece a ambos planos cumple con las ecuaciones:
62 z y x - =+ ; 02 y - z x - =
si elegimos el valor de 0=z
62 y x - = 02 y x - =
que da un sistema incompatible. Esto significa que la recta de intersección de los planos no
corta al plano 0=z .
Si elegimos ahora 0=y : 6 z x =+ ; 0 x - z =
Obtenemos: 3=x ; 3=z
Por lo que un punto de la recta de intersección es: ( )303 ,,A = y la ecuación vectorial de la
recta de intersección es: ( ) ( ) ( )303024303 ,,,,t,,r =+=

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I. 15
x
y
z
O
Figura 12
I.3 SUPERFICIES CUÁDRICAS.
I.3.1 Ecuación general de las cuádricas.
Las superficies cuádricas son generalizaciones a 3ℜ de las secciones cónicas en el plano.
Son superficies cuyas ecuaciones referidas a ejes que no son de simetría (ejes arbitrarios)
presentan la siguiente forma:
0222222 443424142313122
332
222
11 =+++++++++ azayaxayzaxzaxyazayaxa (18)
donde al menos, uno de los seis primeros coeficientes es no nulo. Esta ecuación puede
reducirse a una en la cual no figuren los productos entre las variables, mediante una
rotación adecuada de coordenadas. Pueden luego eliminarse los términos que contienen
las primeras potencias de las nuevas variables mediante una traslación. Se llegará entonces
a la ecuación más simple para dicha cuádrica; esta ecuación es la ecuación canónica de
la cuádrica.
I.3.2 Representación gráfica de las cuádricas.
Analizaremos la forma de cada superficie cuádrica haciendo uso de sus trazas, esto es, las
curvas formadas por la intersección de la superficie con alguno de los planos coordenados.
Todas estas trazas, son secciones cónicas o alguna de las formas degeneradas que
consisten en 2 planos, 1 recta, 1 punto o ningún punto. Comenzaremos nuestro estudio por la
ecuación canónica de cada cuádrica y luego nos ocuparemos de la ecuación general y
del reconocimiento de cada cuádrica.
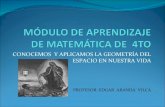
I.3.3 Esfera
Si la ecuación (18) de segundo grado, se reduce a la
forma:
2222 Rzyx =++ (19)
se obtiene una superficie esférica con centro en el
origen de coordenadas y radio R . Si en cambio la
esfera está centrada en el punto ( )c,b,a , la ecuación
se expresa:
( ) ( ) ( ) 2222 Rczbyax =−+−+− (20)
y su gráfica es la mostrada en la figura adjunta.

Cálculo Vectorial – Facultad de Ingeniería – Universidad Nacional de Río Cuarto I.16
I.3.4 Elipsoide
Si en la ecuación general de las cuádricas, los coeficientes son tales que (18) puede ser
expresada como: 12
2
2
2
2
2=++
cz
by
ax (21)
entonces, (21) representa la ecuación de un
elipsoide centrado en el origen.
Para representar gráficamente (21) se
encuentran las curvas de intersección de la
superficie con planos paralelos a los
coordenados. Estas curvas van formando una
red que “soporta” a la superficie.
Tomando planos horizontales paralelos al Oxy y
a una altura k , de ecuación kz = , la
intersección del elipsoide con este plano es:
2
2
2
2
2
21
ck
by
ax
−=+ (22)
que corresponde a una elipse siempre que:
01 2
2>−
ck o sea: ck <
Luego las intersecciones con planos paralelos al Oxy son elipses cuyos semidiámetros
disminuyen hasta reducirse a un punto cuando ck = , ya que la (22) se reduce a:
02
2
2
2=+
by
ax ; cz = ,
que se cumple solamente para 0=x , 0=y , cz = .
Cuando 0=k la elipse tiene semidiámetros a , b sobre los ejes x e y respectivamente.
En forma similar se pueden estudiar las intersecciones con los planos paralelos a los planos
coordenados Oxz y Oyz . Se obtendrán elipses de semidiámetros decrecientes hasta
reducirse a cero cuando se alcance el valor de ax = sobre el eje x , y el punto by = sobre el
eje y . Cuando los dos semidiámetros del elipsoide son iguales, el elipsoide resulta de
revolución respecto de la variable restante.
Ejemplo 15
Reconocer la cuádrica 02042222 =−+−++ zxzyx .
x
y
z
Figura 13

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I. 17
x
y
z
O
Figura 14
Solución
Como los coeficientes de los términos que contienen los cuadrados de las variables son
todos iguales, la cuádrica es una esfera. Si completamos cuadrados:
( ) ( ) 0204211 222 =−−+++−− zyx
que es una esfera de radio 5=R , con centro en ( )201 −,, .
Ejemplo 16
Reconocer la cuádrica 0764 222 =−−++ zzyx .
Solución
La ecuación representa un elipsoide de revolución respecto de una recta paralela al eje y
(las variables x y z forman un bloque de suma de cuadrados).
Completando cuadrados: ( ) 116
3416
222=
−++
zyx
Se reconoce a un elipsoide con centro en ( )300 ,, y semidiámetros: 4=a ; 2=b ; 4=c .
I.3.5 Paraboloide
Si en la ecuación general de las cuádricas, faltan los términos rectangulares o cruzados y
además no está presente el término de segundo grado correspondiente a una de las
variables, la superficie recibe el nombre de paraboloide. Los paraboloides pueden ser de
dos tipos: elípticos o hiperbólicos.
I.3.5.1 Paraboloide elíptico
Responde a la ecuación:
cz
by
ax
=+ 2
2
2
2 (45)
Para hallar su gráfica (figura 14) se encuentran
las intersecciones con los planos kz = :
ck
by
ax
=+ 2
2
2
2
Si 0>c , la ecuación anterior representa elipses con semidiámetros crecientes a medida que
aumenta k ( )0>k . En el caso en que 0=k se obtiene un punto (el vértice del paraboloide).

Cálculo Vectorial – Facultad de Ingeniería – Universidad Nacional de Río Cuarto I.18
x y
z
Figura 15
Cortando con planos kx = : 2
2
2
2
by
ak
cz
+=
la ecuación resultante representa parábolas de eje z , con vértices que se desplazan en la
dirección positiva del eje z a medida que k aumenta en valor absoluto.
Cortando con planos ky = : 2
2
2
2
bk
ax
cz
+=
da parábolas de eje z , con vértices en ascenso a medida que k aumenta.
I.3.5.2 Paraboloide hiperbólico
Su ecuación canónica es: cz
by
ax
=− 2
2
2
2 (23)
Si suponemos que 0>c , las intersecciones son:
Con los planos kz = : ck
by
ax
=− 2
2
2
2
hipérbolas que cambian de eje con el signo de k .
Si 0=k se reduce a un par de rectas.
Con kx = : 2
2
2
2
by
ak
cz
−=
parábolas de eje con ramas descendentes y vértices en ascenso.
Con ky = : 2
2
2
2
bk
ax
cz
−= quedan determinadas parábolas de eje z con ramas ascendentes
y vértices en descenso. La superficie tiene la forma de una “silla de montar” (figura 15).
I.3.6 Hiperboloide
Hay dos tipos de hiperboloides, los llamados de una hoja y los de dos hojas. A continuación
describiremos cada uno de ellos.

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I. 19
Figura 16
x
y
z
I.3.6.1 Hiperboloide de una hoja
Su ecuación canónica es: 12
2
2
2
2
2=−+
cz
by
ax (24)
Las intersecciones con diferentes planos se detallan a
continuación:
Con kz = : 2
2
2
2
2
21
ck
by
ax
+=+ produce elipses
con semidiámetros crecientes a medida que k aumenta.
Si 0=k , se obtiene la elipse más pequeña con
semidiámetros a y b , que representa la garganta del
hiperboloide.
Con kx = e ky = , las intersecciones son hipérbolas.
La figura 16 muestra la forma del hiperboloide de una hoja correspondiente a la ecuación
dada.
I.3.6.2 Hiperboloide de dos hojas
Su ecuación canónica es: 12
2
2
2
2
2−=−+
cz
by
ax (25)
Las intersecciones con planos paralelos a los planos coordenados son:
con kz = : 12
2
2
2
2
2−=+
ck
by
ax
corresponden a elipses con semidiámetro crecientes
siempre que:
012
2>−
ck o sea: ck > .
Si ck = , la elipse se reduce a un punto, significa que entre
los planos cz −= y cz = no hay puntos de la superficie.
Con kx = e ky = las intersecciones son hipérbolas.
I.3.7 Cono
Su ecuación canónica es: 2
2
2
2
2
2
cz
by
ax
=+ (26)
x
y
z
Figura 17

Cálculo Vectorial – Facultad de Ingeniería – Universidad Nacional de Río Cuarto I.20
La intersección con kz = es 2
2
2
2
2
2
ck
by
ax
=+ , correspondiente a
elipses con semidiámetros crecientes y se reducen a un punto
cuando 0=k .
Con kx = e ky = las intersecciones son hipérbolas de eje
vertical.
I.4 SUPERFICIES CILÍNDRICAS.
Una superficie se dice cilíndrica si se puede generar
mediante rectas, todas paralelas a una misma dirección
en el espacio. Estas rectas reciben el nombre de
generatrices de la superficie cilíndrica, y están
"apoyadas" sobre una curva que determina la forma de
la superficie llamada directriz.
Si se toma un sistema de ejes de tal manera que las
generatrices sean paralelas a uno de ellos (por ejemplo el
eje z ) y la curva directriz tal que pertenezca al plano
Oxy , entonces la ecuación de la directriz podrá
expresarse mediante una relación entre variables x e y :
( ) 0=y,xF (27) Como un punto de la superficie cilíndrica P de coordenadas ( )z,y,x tiene las mismas
coordenadas y,x que cualquier otro punto sobre la misma generatriz, quiere decir que los
valores de las coordenadas y,x satisfacen la ecuación de la directriz. Como esta ecuación
se cumple para cualquier valor de z , implica que la variable z no debe figurar en la
ecuación de la superficie. Luego, la ecuación (27) es la ecuación de una superficie en 3ℜ .
Inversamente, si la ecuación de una superficie no contiene en forma efectiva alguna de las
variables significa que la superficie es cilíndrica respecto del eje de la variable que no figura.
Resumiendo:
Una superficie cilíndrica con generatrices paralelas a uno de los ejes coordenados no
incluye en su ecuación a la variable correspondiente a dicho eje.
x
y
z
Figura 18
y
x
z
Figura 19
generatriz
directriz

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I. 21
Una ecuación que no contiene en forma efectiva a una variable, se representa mediante
una superficie cilíndrica con generatrices paralelas al eje de la variable faltante.
Existen superficies cilíndricas que incluyen en forma efectiva en sus expresiones a todas las
variables pero en este caso las generatrices deberán ser obligatoriamente oblicuas a los
planos coordenados. Se podrá mediante una rotación de los ejes coordenados, eliminar
una de las variables de la ecuación con lo cual uno de los nuevos ejes coordenados es
paralelo a las generatrices.
Ejemplo 17
Representar la superficie de ecuación: 0324 22 =−++ xyx .
Solución
Al no contener la variable z , la gráfica de la superficie será una superficie cilíndrica con
generatrices paralelas al eje z . La ecuación de la directriz corresponde a una elipse
desplazada sobre el eje x . La ecuación dada puede pasarse a la forma: ( ) 141 2
2=+
+ yx ,
correspondiendo a una elipse con centro en ( )01,− y semidiámetros 2=a , 1=b contenida en
el plano Oxy .
I.5 SUPERFICIES DE REVOLUCIÓN
Una superficie se dice que es de revolución si se puede generar haciendo girar una curva
dada respecto de un eje. Eligiendo el eje coordenado y como eje de la superficie, y
suponiendo que la curva contenida en el plano Oyz tiene por ecuación: ( )yfz =
Un punto ( )z,y,xP pertenecerá a la superficie
de revolución si su distancia al eje de giro (eje
y ) es igual al radio.
La distancia del punto P al eje es:
( )2 2x z r f y+ = =
eliminando la raíz:
( )[ ]222 yfzx =+ (28)
la (28) es la ecuación de la superficie de
revolución respecto del eje y .
( )yfz =
x
y
z
( )z,y,xP z
x
Figura 20

Cálculo Vectorial – Facultad de Ingeniería – Universidad Nacional de Río Cuarto I.22
Podemos entonces reconocer una superficie de revolución respecto de un eje coordenado
( )y si las otras dos variables aparecen en un bloque de suma de cuadrados; entonces la
superficie es de revolución respecto del eje de la variable que no integra el bloque.
Si la superficie de revolución no tiene una ecuación en la cual dos variables no pueden
llevarse a formar un bloque de suma de cuadrados, no quiere decir que no sea una
superficie de revolución. Mediante un cambio de coordenadas apropiado (rotación y
traslación) podrá llevarse el eje de la superficie a coincidir con uno de los ejes coordenados
tomando la ecuación una forma similar a (28).
Ejemplo 18
Dar la ecuación del cono de revolución respecto del eje z generado por la rotación de la
recta mxz = .
Solución Se tiene: ( )zfmzx == . De acuerdo a la (28):
222 ⎟
⎠⎞
⎜⎝⎛=+
mzyx
Ejemplo 19
Representar la superficie de ecuación: 4
22 yxz +=
Solución
Como las variables x e y aparecen en bloque de suma de cuadrados, la superficie es de
revolución respecto del eje z , generada por la curva de ecuación: 4
2xz = o 4
2yz = ,
contenida en el plano Oxz o Oyz . Esta curva corresponde a una parábola de ramas
ascendentes con vértice en el origen de coordenadas.
I.6 INVARIANTES
Las superficies de segundo grado llamadas
cuádricas no degeneradas, son cinco: tres de
ellas poseen centro de simetría (elipsoide,
hiperboloide de una hoja y de dos hojas) y las
dos restantes no poseen centro de simetría
(paraboloide elíptico e hiperbólico). Las
cuádricas degeneradas son conos, planos
x
y
z 2 2
2 2 0x ya b
− =
Figura 21

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I. 23
dobles y cilindros. En las figuras 21 y 22, se
muestran ejemplos de las dos últimas.
Cualquier superficie ubicada arbitrariamente
respecto de los ejes z,y,x , es posible centrarla
en el origen (si tiene centro) respecto a un
nuevo sistema de ejes coordenados z,y,x ′′′ ,
mediante adecuadas translaciones y
rotaciones del sistema de ejes original z,y,x .
Dada la ecuación general de las cuádricas, ec. (18) y a partir de los jia , definimos una serie
de parámetros que los llamaremos invariantes, ya que los mismos no se modifican con las
operaciones roto - traslatorias que llevan z,y,x a z,y,x ′′′ , estos invariantes son:
44434241
34333231
24232221
14131211
aaaaaaaaaaaaaaaa
=Δ
333231
232221
131211
aaaaaaaaa
=δ
11 22 33S a a a= + +
2 2 2
11 22 11 33 22 33 12 13 23T a a a a a a a a a= + + + + +
menor principal 0, de mayor rangoE = ≠
El menor principal es el determinante de alguna submatriz principal de n n× , aquella que se
obtiene de eliminar la fila y columna correspondiente al elemento ija con i j= )
Los números EyT,S,, δΔ , calculables a partir de los ijji aa = , permiten junto con el rango
h de la matriz de 44 × , reconocer cuál es la cuádrica que corresponde a una ecuación
dada, según se indica en el siguiente cuadro:
x y
z 22 yaz =
Figura 22

Cálculo Vectorial – Facultad de Ingeniería – Universidad Nacional de Río Cuarto I.24
0=δ paraboloide
0>Δ
0<Δ
hiperbólico
elíptico
0≠δ
0y0 >δ⋅> ST elipsoide
0>Δ
0<Δ real
imaginario
Otros casos ej: 0y0 <δ⋅> ST hiperboloide
0>Δ
0<Δ
1 hoja
2 hojas
0≠Δ
0=Δ
0≠δ cono
0y0 >δ⋅> ST imaginario
real Otros casos ej: 0y0 <δ⋅> ST
0=δ
0=T parabólico 3=h cilindro
0<T hiperbólico
0>T
real 0<⋅ ES
imaginario 0>⋅ ES
reales propios 0<⋅ ES
imaginarios 0>⋅ ES
un plano impropio
0=S 0=T 2=h Par de planos
distintos
0<T
Planos imaginarios con arista real 0>T
Planos paralelos distintos
Planos reales secantes
1=h Plano doble
0≠S propio
0=S impropio

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I. 25
I.7 SISTEMAS DE COORDENADAS
Para que las funciones se relacionen con la geometría, es necesario emplear los sistemas de
coordenadas. Si bien hay infinitos sistemas de coordenadas, sólo uno pocos son de uso
frecuente en ingeniería.
I.7.1 Sistemas de coordenadas en 2ℜ : cartesianas y polares.
Sistema cartesiano ortogonal, en el espacio bidimensional.
Se representa mediante dos ejes perpen-
diculares en O , (figura 23). El punto O ,
llamado origen, corresponde a 0=x , 0=y .
Las curvas coordenadas que pasan por un
punto ( )00 y,xP son las rectas paralelas a los
ejes: 0xx = , 0yy = . Se establece una base
vectorial estándar (versores j,i ), tangentes a
las curvas coordenadas.
Sistema de coordenadas polares en el plano
Está representado por un eje polar, que es una semi recta de origen O , tal como se muestra
en la figura 24.
Este origen se denomina polo. Un punto
cualquiera P del plano, distinto del polo,
queda determinado por la distancia desde O
a P , que está dada por 0r y el ángulo 0θ
que forma el segmento OP con el eje polar.
Consideramos que el ángulo θ crece en
sentido antihorario. Es claro que a un punto P
( )O≠ , le corresponde el ángulo 0θ o cualquier
otro ( )π+θ k20 , con k entero. La distancia r ,
por ser distancia, no puede ser negativa.
Las curvas coordenadas son dos: la semi recta radial de origen O que pasa por P (a todos
los puntos le corresponde el mismo ángulo 0θ ) y la circunferencia de centro O y radio 0r (a
todos sus puntos les corresponde la misma distancia al origen, 0r ). Al polo O le corresponde
Figura 23
0x x=
x
0yy =
0y ( )00 y,xP
0x i
O
j
y
Figura 24
θ θ= 0
θO
r0
0rr =
U θ
( )00 θ,rP
rU

Cálculo Vectorial – Facultad de Ingeniería – Universidad Nacional de Río Cuarto I.26
0=r , para cualquier θ . Posee la base vectorial estándar U U rθ , , tangentes a las curvas
0rr = , 0θ=θ respectivamente.
I.7.2 Sistemas de coordenadas en 3ℜ : cartesianas, esféricas y cilíndricas.
Sistema cartesiano ortogonal, en el espacio tridimensional.
Está representado mediante tres ejes mutuamente perpendiculares en O (origen). Este
punto origen corresponde a 0=x , 0=y , 0=z . Para un punto cualquiera ( )000 z,y,xP se
tiene: las superficies coordenadas que pasan por P son los planos 0xx = , 0yy = , 0zz = ,
que en la figura 25 se ven como caras del paralelepípedo.
Las curvas coordenadas que
pasan por P son las rectas
paralelas a los ejes,
intersección de los planos
coordenados.
En cada recta permanecen
constantes dos de las tres
variables. En la figura 25, se
indica la recta coordenada
0xx = , 0zz = y la recta
0yy = , 0zz = , esta última
recta es paralela al eje x .
Posee la base vectorial
estándar k,j,i .
Sistema de coordenadas esféricas
Está constituido por un plano principal xy y una
semi recta z perpendicular al plano principal
en O (polo), según se muestra en la figura 26.
Las coordenadas de un punto ( )OP ≠ están
dadas por la distancia ρ desde O hasta P , el
ángulo azimutal θ que forma el semieje x con
Figura 25
Recta 00 zz;yy ==
0
Plano
Plano
Plano
Plano
Recta
0zz =
0yy =
00 yy;xx == 0xx =
0=y
y
x
z
0y
0x
j i
k
Figura 26
O
ϕ
θ
( )θϕρ ,,P ρ
y
z
x
( )θπρ′′ ,,P 2

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I. 27
el segmento OP ′ (proyección ortogonal de OP sobre el plano principal), y el ángulo de
colatitud ϕ que forma OP con el semieje z . Como ejercicio, deduzca cuáles son las
superficies y curvas coordenadas del punto P .
Relación entre coordenadas cartesianas y esféricas
Cada punto en el espacio puede representarse usando ∞≤ρ<0 , π<θ≤ 20 , π<ϕ≤0 .
ϕρ=ϕθρ=ϕθρ=
coszsensenysencosx
Observe que 2222 ρ=++ zyx .
Sistema de coordenadas cilíndricas
Las coordenadas cilíndricas de un punto
( )z,y,xP en el espacio se obtienen
representando las coordenadas x e y
en coordenadas polares, y haciendo
que la coordenada z sea la coorde-
nada z del sistema de coordenadas
cartesianas, ver figura 27.
Relación entre coordenadas cartesianas y cilíndricas
Cada punto en el espacio puede representarse usando ∞<< r0 , π<θ≤ 20 , ∞<<−∞ z .
zzsenrycosrx
=θ=θ=
Verifique, que al igual que en las coordenadas polares en el plano, 222 ryx =+ .
Nuevamente imagine cómo son las curvas y superficies coordenadas.
I.7.3 Ecuación de las superficies cuádricas en otros sistemas de coordenadas.
Así como es más conveniente describir algunas superficies cuádricas en coordenadas
rectangulares, por ejemplo un plano, suele ser más adecuado describir otras en
coordenadas esféricas o cilíndricas. En el desarrollo de las superficies cuádricas se asociaron
a éstas, ecuaciones dadas en coordenadas rectangulares, a continuación veremos
Figura 27
θ
( )z,,rP θ
r
y
z
x

Cálculo Vectorial – Facultad de Ingeniería – Universidad Nacional de Río Cuarto I.28
mediante ejemplos la forma que adoptan alguna de estas ecuaciones en otros sistemas de
coordenadas.
Ejemplo 20
Escriba la ecuación del cono a 45º 2 2 2x y z+ = en coordenadas cilíndricas y esféricas.
Solución
En coordenadas cilíndricas:
( ) ( )2 2 2r cos rsen zθ + θ = ⇒ ( )22 2 2 2r cos sen zθ + θ = ⇒ 2 2r z= ( )r z≠ =
En coordenadas esféricas:
( ) ( ) ( )2 2 2r cos sen rsen sen r cosθ ϕ + θ ϕ = ϕ ⇒ 2r 2 2sen rϕ = 2cos ϕ ⇒ 45ºϕ =
Ejemplo 21
Identifique la superficie 3=r dada en coordenadas cilíndricas.
Solución
En coordenadas cilíndricas la ecuación 3=r corresponde a la ecuación de una superficie
coordenada, aquella cuyos puntos distan del eje z tres unidades, luego se trata de un
cilindro de radio 3.
Otra forma:
En coordenadas rectangulares 2 2 3x y+ = o también 2 2 9x y+ = que es la conocida
ecuación de un cilindro de radio 3.
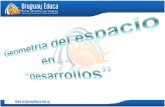
Ejemplo 22
En coordenadas cartesianas, a la función ( ) 22 yxy,xfz +== ,
le corresponde la gráfica de la figura 28, que es un
paraboloide.
Veamos cómo se transforma la representación de la función
en otro sistema de coordenadas. A continuación se indica el
sistema de coordenadas esférico.
x sen cosy sen senz cos
= ρ ϕ θ ≤ θ < π⎧⎪ = ρ ϕ θ < ϕ < π⎨⎪ = ρ ϕ < ρ < ∞⎩
0 2con 0
0
Figura 28
P
P´ x
y
z
O
ρ
θ
ϕ

Cálculo Vectorial – Facultad de Ingeniería - Universidad Nacional de Río Cuarto I. 29
Reemplazando en 22 yxz += nos queda: ( )2 2 2 2cos sen cos senρ ϕ = ρ ϕ θ + θ , y teniendo en cuenta
que 122 =θ+θ sencos y que ϕ−=ϕ 22 1 cossen es posible obtener para ρ , la siguiente
expresión: 21coscos
ϕρ =
− ϕ. De modo que ésta es la función cuya gráfica en coordenadas
rectangulares es el paraboloide. La variable θ ha desaparecido, quedando ϕ como una
variable independiente.
Quizás esto, fuera de contexto podría parecer que es la ecuación de una curva y no de una
superficie (así sería en ℜ2). Para que no ocurra tal confusión debemos precisar que es:
21coscos
ϕρ =
− ϕ, θ∀ . Así queda claro que estamos en ℜ3 y no en ℜ2.