TEMA 1 .- ANÀLISI VECTORIAL - blocs.tecnocampus.cat · ANÀLISI VECTORIAL FÍSICA 1 1-3 1.2...
30
ANÀLISI VECTORIAL FÍSICA 1 1-1 TEMA 1 .- ANÀLISI VECTORIAL 1.1 Introducció MAGNITUDS ESCALARS I VECTORIALS En els conceptes de la física ens trobarem amb magnituds de dos tipus: escalars i vectorials. Les magnituds escalars són aquelles que queden totalment determinades amb un sol nombre real i una unitat de mesura. Exemples són la longitud d’un fil, la massa d’un cos o el temps passat entre dos successos. Se les pot representar mitjançant segments agafats sobre una recta a partir de un origen i de longitud igual al nombre real que indica la mesura. Altres exemples de magnituds escalars són la densitat; el volum; el treball mecànic; la potencia; la temperatura. A les magnituds vectorials no se les pot determinar completament mitjançant un nombre real i una unitat de mesura. Per exemple, per donar la velocitat d’un mòbil en un punto del espai, a més a més de la intensitat s´ha d’indicar la direcció del moviment (donada per la recta tangent a la trajectòria en cada punt) i el sentit del moviment en aquesta direcció (donat per les dues possibles orientacions de la recta). Al igual que amb la velocitat passa amb las forces: els seus efectes depenen no sols de la intensitat sinó també de les direccions i sentits en que actuen. Altres exemples de magnituds vectorials són l’acceleració, la quantitat de moviment, el camp elèctric, el camp magnètic. Per representar les magnituds vectorials s’utilitzen vectors (segments orientats), segments de recta determinats entre dos punts extrems donats en un cert ordre. Hi han diferents maneres de definir un vector, des de el punt de vista matemàtic, geomètric o físic. En realitat la definició es una barreja de tots i podem dir que: Un vector és un element d’un espai vectorial, definit per les seves propietats d’invariança sota un canvi de coordenades. O P
Transcript of TEMA 1 .- ANÀLISI VECTORIAL - blocs.tecnocampus.cat · ANÀLISI VECTORIAL FÍSICA 1 1-3 1.2...

ANÀLISI VECTORIAL FÍSICA 1
1-1
TTEEMMAA 11 ..-- AANNÀÀLLIISSII VVEECCTTOORRIIAALL
1.1 Introducció
MAGNITUDS ESCALARS I VECTORIALS En els conceptes de la física ens trobarem amb magnituds de dos tipus: escalars i vectorials. Les magnituds escalars són aquelles que queden totalment determinades amb un sol nombre real i una unitat de mesura.
Exemples són la longitud d’un fil, la massa d’un cos o el temps passat entre dos successos. Se les pot representar mitjançant segments agafats sobre una recta a partir de un origen i de longitud igual al nombre real que indica la mesura.
Altres exemples de magnituds escalars són la densitat; el volum; el treball mecànic; la potencia; la temperatura.
A les magnituds vectorials no se les pot determinar completament mitjançant un nombre real i una unitat de mesura. Per exemple, per donar la velocitat d’un mòbil en un punto del espai, a més a més de la intensitat s´ha d’indicar la direcció del moviment (donada per la recta tangent a la trajectòria en cada punt) i el sentit del moviment en aquesta direcció (donat per les dues possibles orientacions de la recta). Al igual que amb la velocitat passa amb las forces: els seus efectes depenen no sols de la intensitat sinó també de les direccions i sentits en que actuen. Altres exemples de magnituds vectorials són l’acceleració, la quantitat de moviment, el camp elèctric, el camp magnètic.
Per representar les magnituds vectorials s’utilitzen vectors (segments orientats), segments de recta determinats entre dos punts extrems donats en un cert ordre.
Hi han diferents maneres de definir un vector, des de el punt de vista matemàtic, geomètric o físic. En realitat la definició es una barreja de tots i podem dir que: Un vector és un element d’un espai vectorial, definit per les seves propietats d’invariança sota un canvi de coordenades.
O
P

ANÀLISI VECTORIAL FÍSICA 1
1-2
En el espai bidimensional R2 un vector vindrà representat per dos nombres, es a dir, si volem indicar un pas en aquest espai, des d’un punt O a un punt P, indicarem que ens movem des de (0,0) fins a (x,y). Però inventem un únic símbol matemàtic per representar-ho, el vector r Però, si utilitzem un sistema de coordenades diferent aquests dos nombres canvien a (x’,y’), però que succeeix amb el vector r ?. El vector és el mateix però representat per dos valors numèrics diferents . ( ),r r x y¢ ¢ ¢= =
. La propietat essencial de tot el càlcul vectorial es que els vectors i els resultats de les operacions entre ells tenen un significat intrínsec independent de qualsevol sistema de coordenades. Aquest significat intrínsec és evident mentre els vectors i les seves operacions es defineixen geomètricament, però deixa de ser-ho quan utilitzem les components dels vectors respecte els sistemes de coordenades. Quan es vol definir un vector a partir de les seves components, s’ha de tenir en compte que la definició sigui correcte, en el sentit que el vector estigui ben definit. Un segment orientat en el espai ha de mantenir la seva longitud per qualsevol sistema de coordenades.
DEFINICIONS: S’anomena mòdul d’un vector a la longitud del segment orientat que el defineix. El
mòdul és sempre un nombre positiu.
modv v=
Dos vectors són iguals (anomenats equipolents) quan tenen el mateix mòdul i la mateixa direcció i sentit .
En la figura es a b=
. Aquesta definició correspon als anomenats vectors lliures, es a dir , vectors que poden lliscar en una recta i desplaçar-se paral·lelament a si mateix en l’espai. Són els que ens interessen i compleixen la relació d’equivalència
O
y
x
r
P
a b

ANÀLISI VECTORIAL FÍSICA 1
1-3
1.2 Representació geomètrica d’un vector Quan el moviment té lloc en dues o tres dimensions el desplaçament d’una partícula té una direcció a l’espai i un mòdul. La magnitud que expressa la direcció i la distància en línia recta compresa entre dos punts de l’espai és un segment lineal anomenat vector desplaçament. Es representa gràficament per una segment orientat que té la direcció del desplaçament , amb longitud proporcional a la magnitud del desplaçament.
Observem que la posició d’un punt P movent-se en dues o tres dimensions no es pot caracteritzar únicament per un valor numèric ( quantitat escalar). Exemple
Si un vector va des d’un punt A ( punt inicial) a un punt B ( punt final ), denotarem el vector per
v AB=
Suposem que el vector 1v AB= representa el desplaçament d’un punt a lo llarg d’una trajectòria . Si a continuació el punt es mou fins el punt C el nou vector desplaçament serà
2v BC= . Llavors el vector 3v AC=
donarà el desplaçament total del punt P i direm que 3 1 2v v v= +
P1 P2 vector desplaçament de P1 a P2
trajectòria del mòbil
X Y
Z
AB
v AB=
1v 2v
3v
3 1 2v v v= + A B C

ANÀLISI VECTORIAL FÍSICA 1
1-4
Observem que els vectors són magnituds físiques que tenen mòdul i direcció i es sumen i resten com els desplaçaments
Exemple
Un home camina 3 km cap a l’est i després 4 km a 60º al nord-est. Determineu el desplaçament total.
Observem que el desplaçament total ve
representat pel vector OB OA AB= +
Per determinar el desplaçament que
significa el vector OB
haurem d’estudiar el triangle OAB.
Aquest triangle no és un triangle rectangle i no podem aplicar el teorema de Pitàgores.
Podem determinar el mòdul del vector OB
i l’angle que forma amb la direcció Est, aplicant altres teoremes relatius als triangles, com són el teorema del cosinus:
2 23 4 2·3·4cos120º 37OB cm= + − =
SUMA I RESTA DE VECTORS
N
E3 km 60º 4 km120º θ O A
B

ANÀLISI VECTORIAL FÍSICA 1
1-5
i el teorema del sinus: sin sin120º 4sin ·sin120º4 37 37
θ θ= =
1.3 Vectors en dues dimensions Suposem un conjunt de vectors confinats en un pla coordenat fix. Suposarem el sistema de coordenades rectangulars (X,Y) Podem assignar coordenades als punts inicials i finals de cada vector en aquest pla. Es a dir, podem assignar parelles de nombres reals a aquests punts. Punt A ( xA , yA) Punt B ( xB , yB ) Vector v AB=
= (v1,v2) = ( xB-xA , yB-yA)
TEOREMES DEL SINUS I DEL COSINUSTeorema del sinus: sin sin sin
a b cα β γ= =
Teorema del cosinus: 2 2 2
2 2 2
2 2 2
2· · ·cos2· · ·cos2· · ·cos
a b c b cb a c a cc a b a b
αβγ
= + −= + −= + −
α β
γ a b
c
Y XO
Y
X O A xA
v AB= B
xB yB
yA

ANÀLISI VECTORIAL FÍSICA 1
1-6
Direm que v1 és la coordenada horitzontal i v2 és la coordenada vertical del vector v AB= Representarem els vectors del pla mitjançant parelles de nombres reals: 1 2,v v v= D’aquesta manera les afirmacions sobre els vectors es poden traduir al llenguatge de l’àlgebra (Àlgebra Vectorial ). L’avantatge de treballar amb el llenguatge de l’àlgebra sobre el llenguatge geomètric en que les deduccions seran molt més senzilles i que a l’hora de generalitzar les deduccions a més dimensions l’enfocament algebraic és més directe.
Als nombres a1 i a2 , 1 2,a a , se’ls anomena components del vector. Observem que per sumar dos vectors sumem les seves components i que per multiplicar un vector per un escalar hem de multiplicar cada component per l’escalar. Exemple:
Sigui 3, 2 6,7a i b= − = −
Determineu : ; 4 ; 2 3a b a a b+ +
3 6, 2 7 3,5 3,5
4 4·3, 4·( 2) 12, 8
2 3 2 3, 2 3 6,7 6, 4 18, 21 12,17
a b
a
a b
+ = − − + = − −
= − = −
+ = − + − = − + − = −
En un espai vectorial de dues dimensions podem definir: vector zero 0 com: 0 0,0=
L’espai vectorial de dues dimensions V2 és el conjunt de totes les parelles ordenades de nombres reals ,x y , anomenades vectors, que cumpleixin els següents axiomes: • Suma de vectors: Si 1 2,a a a= i 1 2,b b b=
són vectors, llavors: 1 1 2 2,a b a b a b+ = + +
• Multiplicació de vectors per escalars: 1 2· ,a a aλ λ λ=

ANÀLISI VECTORIAL FÍSICA 1
1-7
vector oposat del vector a , 1 2,a a a− = − − Mòdul d’un vector a , que representarem per: a és un nombre real donat per: 2 2
1 2a a a= + Aquest valor és la longitud de qualsevol segment de recta dirigit que representa al vector a . Observem que : 0a ≥ i que a = 0 únicament quan 0,0a = . Vector de Posició: Si P és un punt del pla coordenat i O és l’origen, llavors el vector OP s’anomena vector de posició de P.
Si el punt P s’està movent en el pla seguit una determinada trajectòria, la posició del punt la podrem identificar mitjançant un vector de posició r . Com aquest vector anirà canviant a mesura que passa el temps, les seves coordenades seran funcions de t, ( ) ( ), ( )r t x t y t=
Abans d’abordar l’estudi del moviment del punt P coneguda la trajectòria que segueix, és a dir, determinar la seva velocitat i accerelació :
Y X O
POP
xPyP
,P P
OP x y=
Y
X O P
r
x(t)y(t) ( ), ( )r OP x t y t= =
trajectòria del punt P

ANÀLISI VECTORIAL FÍSICA 1
1-8
( ) ( ), ( ) ; ( ) ( ), ( )x y x yv t v t v t a t a t a t= =
estudiarem algunes propietats dels vectors.
Demostració: Sigui 1 2,a a a= , llavors 1 2· · , ·c a ca ca= ;
( ) ( ) ( ) ( )2 2 2 2 2 2 21 2 1 2 1 2· · ·c a ca ca c a a c a a c a= + = + = + =
Exemple : Sigui 3 4,a = i c= 10 , llavors
( ) ( )2 2 2 210 10 3 10 4 30 40 900 1600 2500 50· · ·a = + = + = + = =
( )2 210 3 4 10 5 50· · ·c a = + = =
Si , ,a b c són tres vectors qualsevol de V2 llavors es compleix: a b b a+ = +
( ) ( )a b c a b c+ + = + +
0a a+ =
Es diu que dos vectors a i b
de V2 diferents de zero tenen: la mateixa direcció si ·b c a=
per algun valor escalar c > 0
direcció oposada si ·b c a= per algun valor escalar c < 0
Si a és un vector i c un escalar , ∈c R , llavors : · ·c a c a=

ANÀLISI VECTORIAL FÍSICA 1
1-9
Vectors especials: ˆ ˆ,i j es defineixen per: 1 0 0 1ˆ ˆ, ; ,i j= = Aquests vectors s’utilitzen per denotar d’una altra manera els vectors en dues dimensions. Si : 1 2,a a a= podem escriure:
1 2 1 2 1 20 0 1 0 0 1 ˆ ˆ, , · , · ,a a a a a a i a j= + = + = + Combinació lineal dels vectors ˆ ˆ,i j Si expressem els vectors ,a b com combinació lineal dels vectors ˆ ˆ,i j
1 2ˆ ˆa a i a j= + i 1 2
ˆ ˆb b i b j= + les regles de la suma , resta i multiplicació per un escalar de vectors es poden expressar com:
( ) ( ) ( ) ( )1 2 1 2 1 1 2 2ˆ ˆ ˆ ˆ ˆ ˆa i a j b i b j a b i a b j+ + + = + + +
( ) ( ) ( ) ( )1 2 1 2 1 1 2 2ˆ ˆ ˆ ˆ ˆ ˆa i a j b i b j a b i a b j+ − + = − + −
( ) ( ) ( )1 2 1 2ˆ ˆ ˆ ˆ· · ·c a i a j c a i c a j+ = +
Si a
i b
són vectors de V2 i c i d són escalars, ∈,c d R llavors:
( )· · ·c a b c a cb+ = +
( )· · ·c d a ca d a+ = + ( ) ( ) ( )· · · · · ·c d a c d a d ca= = 1·a a=
ANÀLISI VECTORIAL FÍSICA 1
1-10
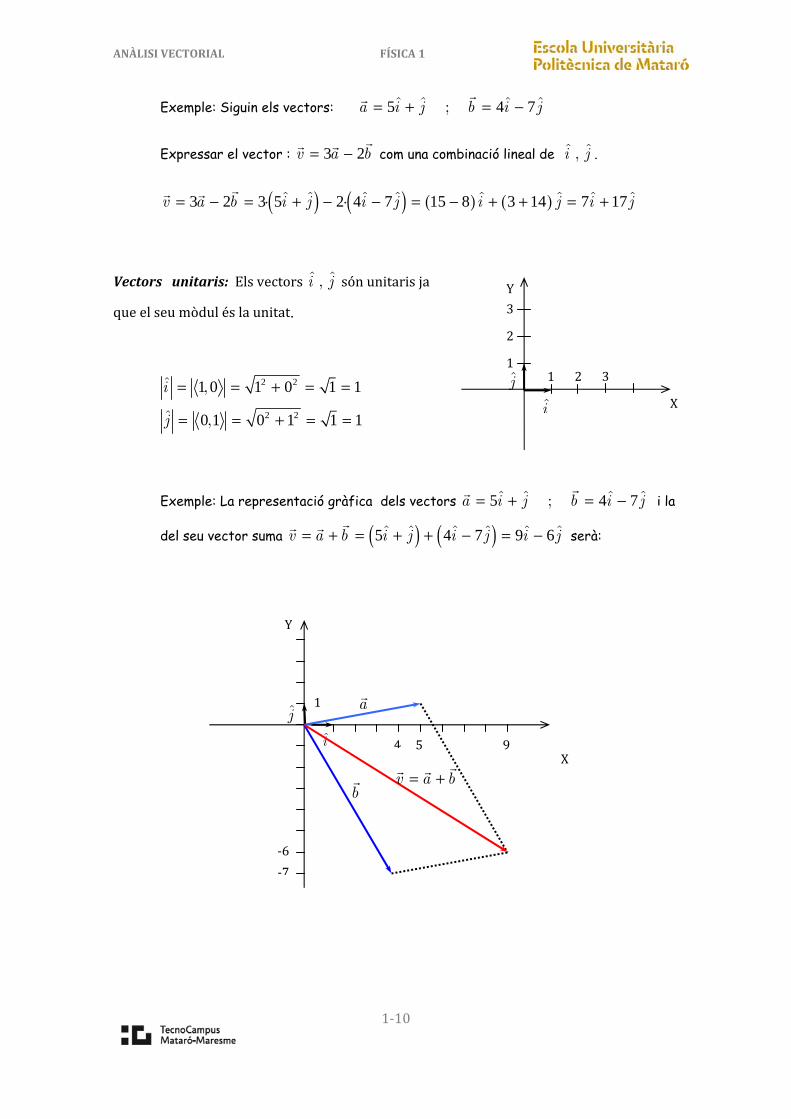
Exemple: Siguin els vectors: 5 4 7ˆ ˆ ˆ ˆ;a i j b i j= + = −
Expressar el vector : 3 2v a b= −
com una combinació lineal de ˆ ˆ,i j .
( ) ( ) ( ) ( )3 2 3 5 2 4 7 15 8 3 14 7 17ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ· ·v a b i j i j i j i j= − = + − − = − + + = +
Vectors unitaris: Els vectors ˆ ˆ,i j són unitaris ja que el seu mòdul és la unitat.
2 2
2 2
1 0 1 0 1 1
0 1 0 1 1 1
ˆ ,
ˆ ,
i
j
= = + = =
= = + = =
Exemple: La representació gràfica dels vectors 5 4 7ˆ ˆ ˆ ˆ;a i j b i j= + = −
i la
del seu vector suma ( ) ( )5 4 7 9 6ˆ ˆ ˆ ˆ ˆ ˆv a b i j i j i j= + = + + − = − serà:
i
j X
Y1 2 3 12
3
i
j
X
Y 1
4 5
-7
9a
b
-6 v a b= +

ANÀLISI VECTORIAL FÍSICA 1
1-11
1.3.1 BASE D’UN ESPAI VECTORIAL Al conjunt dels dos vectors unitaris ˆ ˆ,i j , es diu que el una base del espai vectorial V2 . Qualsevol vector d’un espai vectorial es pot representar com una combinació lineal dels vectors d’una base. Si representem un vector a com a combinació lineal de la base ˆ ˆ,i j
1 2ˆ ˆa a i a j= +
podem interpretar que el vector a és la suma de dos vectors 1 2iˆ ˆa i a j . Al valor a1 se l’anomena component
horitzontal del vector a , i a a2 component vertical del vector a . En determinades circumstàncies és necessari trobar un vector de mòdul unitat en una determinada direcció.
Exemple : Sigui el vector 3 4ˆ ˆa i j= −. Trobar un vector unitari en la direcció del
vector a
.
Determinarem el mòdul del vector: ( )223 4 25 5a = + − = =
Llavors: 3 4 3 4 0 6 0 85 5 5−= = = − = −
ˆ ˆˆ ˆ ˆ ˆ. .
a
a i ju i j i j
a
Comprovem que és un vector unitari:
i j X
Y
1ˆa i
2ˆa j
a
Sigui a un vector diferent del vector nul. 0a ≠
Llavors el vector: ˆ aua
=
és un vector unitari amb la mateixa direcció que el vector del vector a

ANÀLISI VECTORIAL FÍSICA 1
1-12
( )220 6 0 8 0 36 0 64 1 1= + − = + = =
. . . .au
1.4 Vectors en tres dimensions Per estudiar el moviment d’una partícula a l’espai és necessari introduir un sistema de coordenades tridimensional. Una terna ordenada de nombres reals ( a, b, c ) és un conjunt de tres nombres {a,b,c} ordenats de forma que considerem a com el primer, b com el segon i c com el tercer nombre. El conjunt total de ternes sol representar-se per : R3 Per poder localitzar els punts a l’espai, escollim un punt fix O ( anomenat origen ) i considerem tres rectes coordenades mútuament perpendiculars entre sí ( anomenades eix X , eix Y i eix Z ) amb origen comú a O . Si P és un punt de l’espai, la seva projecció en l’eix X val a , que direm que és la coordenada x del punt P. ( Podem pensar que a és la distància del punt al pla YZ ) Anàlogament, les coordenades b i c són les projeccions del punt sobre els eixos Y i Z respectivament.
• a , és la coordenada x del punt P. • b , és la coordenada y del punt P. • c , és la coordenada z del punt P. Utilitzarem la terna ( a, b, c ) per denotar les coordenades de P .
Inversament a cada terna ordenada (a,b,c) de nombres reals li correspon un punt P de coordenades a ,b i c . La correspondència un a un entre els punts de l’espai i les ternes ordenades de nombres X
Y
ZP
ab
c

ANÀLISI VECTORIAL FÍSICA 1
1-13
reals s’anomena Sistema coordenat rectangular en tres dimensions. El sistema V3 de vectors en tres dimensions es defineix com la col·lecció de totes les ternes ordenades 1 2 3, ,a a a de nombres reals, anomenades vectors, subjectes a les propietats de suma i producte per un escalar vistes anteriorment en l’estudi dels vectors en dues dimensions. Els nombres a1 , a2 i a3 s’anomenen components dels vector 1 2 3, ,a a a Sigui 1 2 3 1 2 3, , ; , ,a a a a b b b b= =
dos vectors i c un escalar , c ∈ . Definim : • La suma de vectors en tres dimensions com:
1 1 2 2 3 3, ,a b a b a b a b+ = + + +
• El producte d’un vector per un escalar com: 1 2 3 1 2 3· · , , · , · , ·c a c a a a c a c a c a= =
• El vector zero com: 0 0,0,0=
• El vector oposat: 1 2 3, ,a a a a− = − − − • La resta de vectors com:
( ) 1 1 2 2 3 3, ,a b a b a b a b a b− = + − = − − −
Les propietats dels vectors en dues dimensions es poden generalitzar sense dificultats a V3, simplement agafant la tercera component. Un vector 3
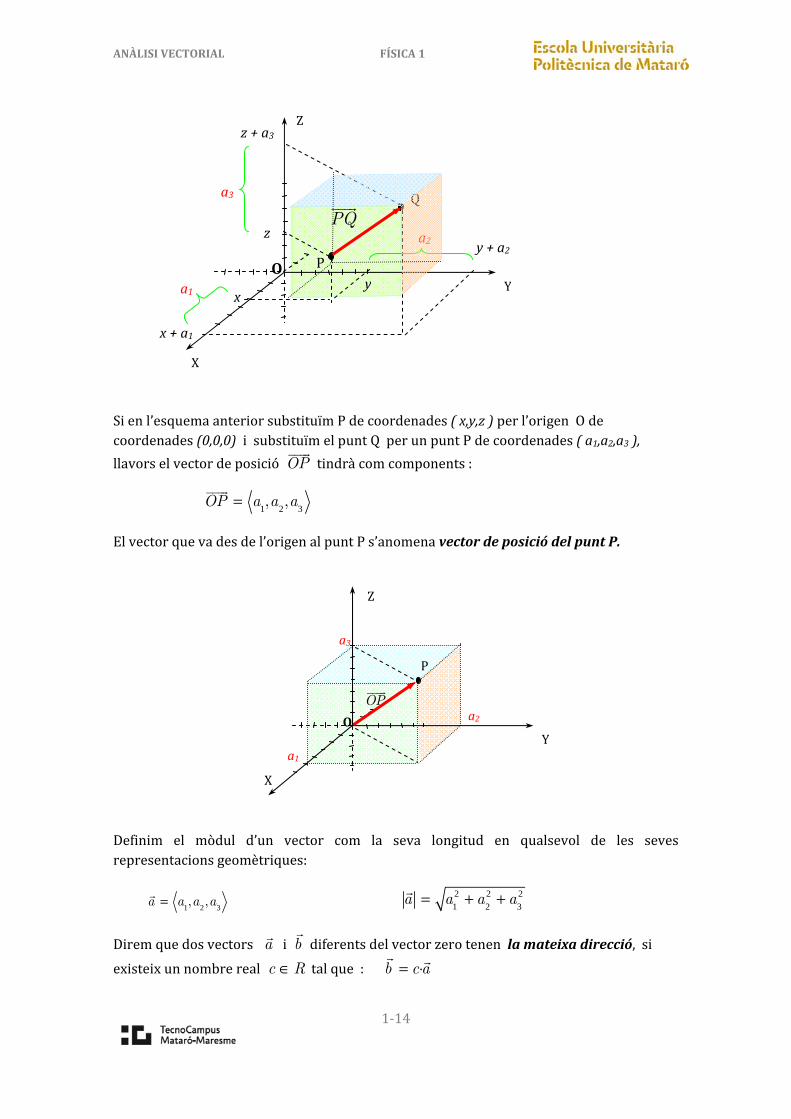
1 2 3, ,a a a a V= ∈ es pot representar en un sistema de coordenades rectangulars mitjançant un segment de recta orientat PQ , amb un punt inicial arbitrari: P ( x , y , z ) i un punt final : Q ( x + a1 , y + a2 , z + a3 ).
ANÀLISI VECTORIAL FÍSICA 1
1-14
Si en l’esquema anterior substituïm P de coordenades ( x,y,z ) per l’origen O de coordenades (0,0,0) i substituïm el punt Q per un punt P de coordenades ( a1,a2,a3 ), llavors el vector de posició OP tindrà com components : 1 2 3, ,OP a a a= El vector que va des de l’origen al punt P s’anomena vector de posició del punt P.
Definim el mòdul d’un vector com la seva longitud en qualsevol de les seves representacions geomètriques: 2 2 21 2 3a a a a= + +
Direm que dos vectors a i b diferents del vector zero tenen la mateixa direcció, si existeix un nombre real ∈c R tal que : ·b c a=
Z
X YO P
x + a1
y + a2
z + a3
xy
z
Qa3
a1
a2
PQ
1 2 3, ,a a a a=
X YO
PZ
a3
a1
a2
OP

ANÀLISI VECTORIAL FÍSICA 1
1-15
Si c > 0 els sentits dels dos vectors també és el mateix . Si c < 0 els sentits són oposats. Es diu que a és un vector unitari si el seu mòdul és la unitat: 1a = Els vectors unitaris i , j , k de components: 1 0 0
0 1 0
0 0 1
ˆ , ,
ˆ , ,
ˆ , ,
i
j
k
=
=
=
Són vectors importants ja que qualsevol vector 1 2 3, ,a a a a= es pot expressar com una combinació lineal dels vectors i , j , k .
1 2 3 1 2 3 1 2 31 0 0 0 1 0 0 0 1 ˆˆ ˆ, , · , , · , , · , ,a a a a a a a a i a j a k= = + + = + + La traducció de les regles de la suma, resta i producte per un escalar amb la notació i , j , k és immediata i igual que la feta pels vectors en dues dimensions.
X Y O
Za3
a1
a2
a
i k
j

ANÀLISI VECTORIAL FÍSICA 1
1-16
1.5 Producte escalar de vectors Siguin 1 2 3, ,a a a a= i 1 2 3, ,b b b b= dos vectors de V3.
Definim el seu producte escalar ·a b com el nombre real següent: 1 1 2 2 3 3·a b a b a b a b= + +
PROPIETATS Siguin 1 2 3, ,a a a a= , 1 2 3, ,b b b b= i 1 2 3, ,c c c c= tres vectors de V3, i sigui λ un nombre real , λ ∈ , llavors:
2·a a a= · ·a b b a=
( )· · ·a b c a b a c+ = +
( ) ( ) ( )· · ·a b a b a bλ λ λ= =
0 0·a =
A partir de les propietats dels nombres reals es poden demostrar aquestes propietats. Demostrem a mode d’exemple la tercera de les propietats:
( )· · ·a b c a b a c+ = +
( ) ( ) ( )
( ) ( )
1 2 3 1 2 3 1 2 3 1 2 3 1 1 2 2 3 3
1 1 1 2 2 2 3 3 3 1 1 1 1 2 2 2 2 3 3 3 3
1 1 2 2 3 3 1 1 2 2 3 3
· , , · , , , , , , · , ,
( ) ( ) ( )
· ·
a b c a a a b b b c c c a a a b c b c b c
a b c a b c a b c a b a c a b a c a b a c
a b a b a b a c a c a c a b a c
+ = + = + + + =
+ + + + + = + + + + + =
+ + + + + = +
Siguin 1 2 3, ,a a a a= , 1 2 3, ,b b b b= dos vectors diferents de zero ,
i sigui θ l’angle que formen, llavors resulta que:

ANÀLISI VECTORIAL FÍSICA 1
1-17
· cosa b a b θ=
Per demostrar-ho observarem el vector AB
, que juntament amb els vectors a i b formen un triangle Sabem que:
( ) ( ) ( )1 1 2 2 3 3
2 2 21 1 2 2 3 3
, ,AB b a b a b a
AB b a b a b a
= − − −
= − + − + −
Aplicant el teorema del cosinus: 2 22 2 cosAB a b a b θ= + −
Llavors: ( ) ( ) ( )2 2 2 2 2 2 2 2 21 1 2 2 3 3 1 2 3 1 2 3 2 cosb a b a b a a a a b b b a b θ− + − + − = + + + + + −
2 2 2 2 2 2 2 2 2 2 2 21 2 3 1 2 3 1 1 2 2 3 3 1 2 3 1 2 32 2 2 2 cos
K K
a a a b b b a b a b a b a a a b b b a b θ+ + + + + − − − = + + + + + −
Quedant:
( )( )
1 1 2 2 3 3
1 1 2 2 3 3
·
2 2 cos
cos · cosa b
a b a b a b a b
a b a b a b a b a b a b
θ
θ θ
+ + + =
+ + = =
D’aquesta manera podrem calcular l’angle format per dos vectors a l’espai: ·cos a b
a bθ =
X YO
Z
θ
A=(a1 , a2 ,a3 )Pla determinat pels vectors a
B=( b1 , b2 ,b3 )
b
O θ
A=(a1 , a2 ,a3 )
AB
a
B=( b1 , b2 ,b3 )b

ANÀLISI VECTORIAL FÍSICA 1
1-18
Direm que dos vectors són ortogonals si el seu producte escalar és zero, sense que cap dels dos sigui el vector zero. Si ho apliquem als vectors i , j , k que sabem que són ortogonals mútuament: ˆ ˆ ˆ ˆ· cos 0º 1·1·1 1
ˆ ˆ ˆ ˆ· cos 0º 1·1·1 1
ˆ ˆ ˆ ˆ· cos 0º 1·1·1 1
ˆ ˆ ˆ ˆ· cos90º 1·1·0 0
ˆ ˆˆ ˆ· cos90º 1·1·0 0
ˆ ˆˆ ˆ· cos90º 1·1·0 0
i i i i
j j j j
k k k k
i j i j
i k i k
j k j k
= = =
= = =
= = =
= = =
= = =
= = =
Per tant si expressem els vectors a i b en funció de i , j , k : 1 2 3 1 2 3
ˆ ˆˆ ˆ ˆ ˆ;a a i a j a k b b i b j b k= + + = + + el seu producte escalar serà:
( ) ( ) ( )
1 2 3 1 2 3
1 1 1 21
ˆ ˆˆ ˆ ˆ ˆ· ·
ˆ ˆ ˆ ˆ· · · ·
a b a i a j a k b i b j b k
a b i i a b i j
= + + + + =
+
( )1 3ˆˆ· ·a b i k+
( )2 1ˆ ˆ· ·a b j i
+
( )2 2 2 31
ˆˆ ˆ ˆ· · · ·a b j j a b j k
+ +
( )3 1ˆ ˆ· ·a b k i
+
( )3 2ˆ ˆ· ·a b k j+ 3 3
1
1 1 2 2 3 3
ˆ ˆ· ·
· · ·
a b k k
a b a b a b
+ =
+ +
Tal com l’havíem definit.
Si · 0a b = llavors ⊥
a b

ANÀLISI VECTORIAL FÍSICA 1
1-19
1.5.1 PROJECCIÓ D’UN VECTOR EN LA DIRECCIÓ D’UN ALTRE Una característica important del producte escalar de vectors és que ens permet conèixer la projecció d’un vector en la direcció d’un altre. Siguin PQ i PR
dos vectors de V3 amb el mateix punt inicial. Si S és la projecció del punt Q sobre la recta que passa per P i R al nombre real: cosPQ θ
se l’anomena projecció del vector PQ
en la direcció del vector PR
Si fem el producte escalar de PR i PQ
resulta que: ·· cos cos · ·PR PQ PRPR PQ PR PQ PQ PQ PR PQ
PR PRθ θ= = = =
Per tant: La projecció del vector PQ
en la direcció del vector PR
és igual al producte
escalar del vector que volem projectar per un vector unitari en la direcció en que volem projectar.
Exemples.-
Sigui el vector ˆˆ ˆ4 5a i j k= − + i ˆˆ ˆ6 3 2b i j k= + −
El seu producte escalar és: · 4·6 1·3 5·2 24 3 10 11a b = − − = − − =
El mòdul de cada vector és: 2 2 24 ( 1) 5 16 1 25 42a = + − + = + + =
2 2 26 3 ( 2) 36 9 4 49 7b = + + − = + + = =
QP Rθ
PQ
PR
cosPQ θ

ANÀLISI VECTORIAL FÍSICA 1
1-20
Vector unitari en direcció de a : ˆˆ ˆ4 5 4 1 5 ˆˆ ˆˆ
42 42 42 42a i j ka i j ka
− += = = − +
Vector unitari en direcció de b
: ˆˆ ˆ6 3 2 6 3 2ˆ ˆˆ ˆ
7 7 7 7b i j kb i j kb
+ −= = = + −
L’angle que formen :
· 11cos 0.2425 arccos 0.2425 76º42·7
a ba b
θ θ= = = = =
La projecció del vector a en la direcció de b
:
( )Pr cos 42·cos 76º
6 3 2 6 3 2 11ˆ ˆ ˆˆ ˆ ˆ ˆPr · 4 5 · 4· 1· 5·7 7 7 7 7 7 7
b
b
a a
a a b i j k i j k
θ= =
= = − + + − = − + − =
( ) ( ) ( ) ( ) ( ) ( )= + + ⋅ = ⋅ + ⋅⋅
ˆˆ ˆˆ ˆ ˆ ˆ ˆ ˆ
x y z x yA i A j A k i A i i A jA i i ( ) ( )+ ⋅ˆ ˆ
zA k i =
xA
( ) ( )
( ) ( ) ( ) ( )= + + ⋅ + + =
⋅ + ⋅
⋅
ˆ ˆˆ ˆ ˆ ˆ
ˆ ˆ ˆ ˆx y z x y z
x x x y
A i A j A k A i A j A k
A i A A i
A
i A
A
j ( ) ( )+ ⋅ ˆˆx zA i A k
( ) ( )+
⋅ˆ ˆy xA j A i ( ) ( ) ( ) ( )+ ⋅ + ⋅ ˆˆ ˆ ˆ
y y y zA j A j A j A k
( ) ( )+
⋅ˆ ˆz xA k A i ( ) ( )+ ⋅ˆ ˆ
z yA k A j ( ) ( )
2 2 2
+ ⋅ =
+ ++ = +
ˆ ˆz z
x x y y z z x y z
A k A k
A A AA A A AAA
2
2 2 2
cos 0
x y z
A A A A A A A A
A A A A
⋅ = = → = ⋅
= + +
Fixem-nos com aquests dos exemples de càlcul escalar ens proporcionen informació de la
longitud del vectorA
, que representem per A A=
. Comparant obtenim:
2 2 2= + +
x y zA A A A

ANÀLISI VECTORIAL FÍSICA 1
1-21
1.5.2 COSINUS DIRECTORS Fins ara hem vist com determinar la posició d’un vector mitjançant les seves components respecte els eixos de coordenades. Hi ha una altre manera de determinar la posició del vector, i es a partir dels angles que forma el vector respecte els eixos de coordenades.
Determinem les components del vector unitari A ˆˆ ˆ
ˆ ˆ ˆˆ ˆx y z yx zA i A j A k AA A A
A A i j kA A A A A
+ += → = = ⋅ + ⋅ + ⋅
Com ⋅ = ⋅ = ⋅ =
ˆˆ ˆ; ;x y z
A i A A j A A k A ⋅ = θ ⋅ = θ ⋅ = θ
ˆˆ ˆcos ; cos ; cosx y z
A i A A j A A k A θ θ θ
= + + = θ + θ + θ
cos cos cos
ˆ ˆ ˆˆ ˆ ˆ ˆcos cos cosx y z
x y z
A A AA i j k i j k
A A A
Veiem que els cosinus directors d’un vector A són les components del vector unitari en la seva direcció A : = = θ + θ + θ
ˆ ˆˆ ˆcos cos cos
x y zA A A A i j k
Els cosinus directors compleixen la condició : 2 2 2 2
2 2 22 2 2
2 2 1cos cos cos yx z x x xx y z
AAA A A A A
A A A A A
+ + θ + θ + θ = + + = = =
A
Ax
Ay
Az
θz
X
Z
Yθy θx
ANÀLISI VECTORIAL FÍSICA 1
1-22
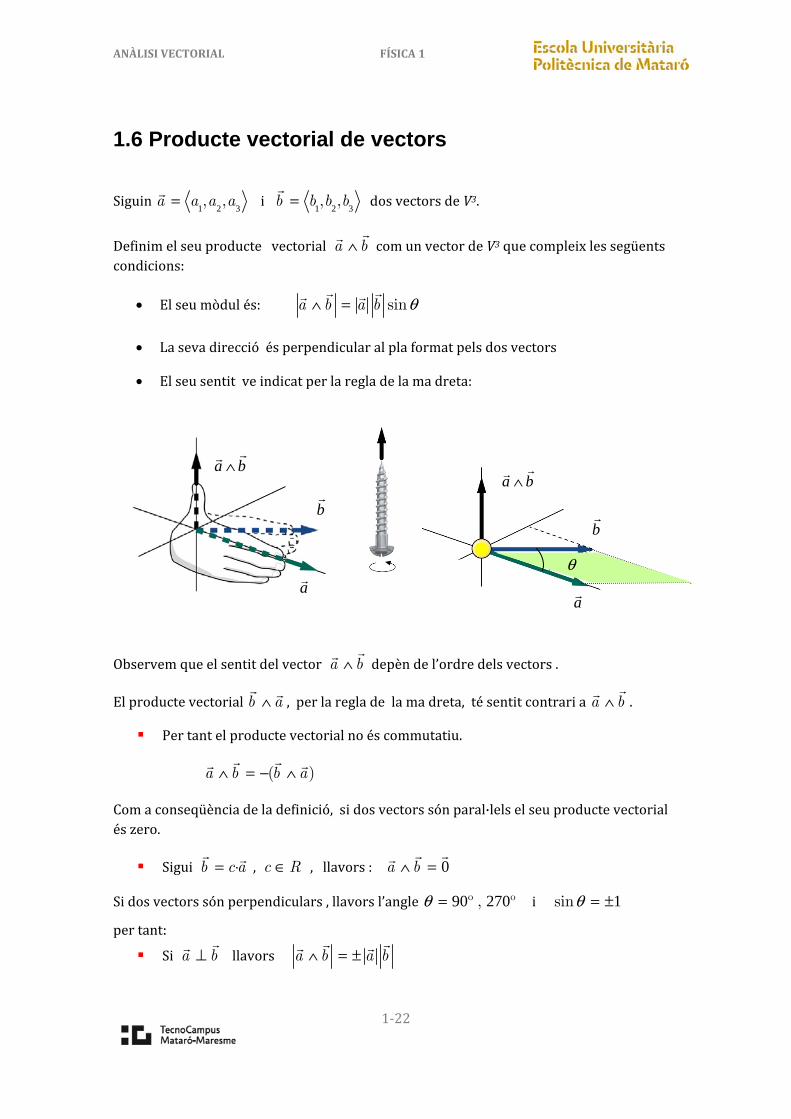
1.6 Producte vectorial de vectors Siguin 1 2 3, ,a a a a= i 1 2 3, ,b b b b=
dos vectors de V3. Definim el seu producte vectorial ∧
a b com un vector de V3 que compleix les següents condicions:
• El seu mòdul és: θ∧ =
sina b a b • La seva direcció és perpendicular al pla format pels dos vectors • El seu sentit ve indicat per la regla de la ma dreta:
Observem que el sentit del vector ∧
a b depèn de l’ordre dels vectors . El producte vectorial b a∧ , per la regla de la ma dreta, té sentit contrari a ∧
a b .
Per tant el producte vectorial no és commutatiu. ( )a b b a∧ = − ∧ Com a conseqüència de la definició, si dos vectors són paral·lels el seu producte vectorial és zero.
Sigui ·b c a= , ∈c R , llavors : 0a b∧ =
Si dos vectors són perpendiculars , llavors l’angle 90 270º , ºθ = i 1sinθ = ± per tant: Si a b⊥
llavors a b a b∧ = ±
a b
a b∧
a b
a b∧
θ

ANÀLISI VECTORIAL FÍSICA 1
1-23
Si expressem els vectors a i b en funció de i , j , k : 1 2 3 1 2 3
ˆ ˆˆ ˆ ˆ ˆ;a a i a j a k b b i b j b k= + + = + + per calcular el producte vectorial tindrem en compte què:
( )
ˆ ˆˆ ˆ ˆ ˆ0 ; 0 ; 0
ˆˆ ˆ ˆ ˆ ˆ ˆsin 90º 1·1·1 1
ˆˆ ˆ ˆ ˆ ˆ ˆsin 270º 1·1· 1 1
ˆ ˆ ˆˆ ˆ ˆ ˆsin 270º 1·1·( 1) 1
ˆ ˆ ˆˆ ˆ ˆ ˆsin 90º 1·1·1 1
ˆ ˆ ˆˆ ˆ ˆ ˆsin 90º 1·1·1 1
ˆ
∧ = ∧ = ∧ =
∧ = = = ∧ =
∧ = = − = − ∧ = −
∧ = = − = − ∧ = −
∧ = = = ∧ =
∧ = = = ∧ =
i i j j k k
i j i j i j k
j i j i j i k
i k i k i k j
k i k i k i j
j k j k j k i
k ( )ˆ ˆˆ ˆ ˆ ˆsin 270º 1·1· 1 1∧ = = − = − ∧ = −j k j k j i
( ) ( )
1 2 3 1 2 3
1 1 1 2 1 3ˆ0 ˆ
2 1 2 2 2 3ˆ ˆ0
3 1 3 2 3 3ˆ ˆ
ˆ ˆˆ ˆ ˆ ˆ
ˆˆ ˆ ˆ ˆ ˆ
ˆˆ ˆ ˆ ˆ ˆ
ˆ ˆ ˆˆ ˆ
jk
ik
j i
a b a i a j a k b i b j b k
a b i i a b i j a b i k
a b j i a b j j a b j k
a b k i a b k j a b
−
−
−
∧ = + + ∧ + + =
∧ + ∧ + ∧ + ∧ + ∧ + ∧ +
∧ + ∧ +
( ) ( ) ( )0
2 3 3 2 3 1 1 3 1 2 2 1
ˆ
ˆˆ ˆ
k k
a b a b i a b a b j a b a b k
∧ =
− + − + −
Aquesta és la definició algebraica del producte vectorial. ( ) ( ) ( )2 3 3 2 3 1 1 3 1 2 2 1
ˆˆ ˆa b a b a b i a b a b j a b a b k∧ = − + − + − Observant la definició algebraica ens donem compte que a través d’un determinant podem obtenir el mateix resultat:

ANÀLISI VECTORIAL FÍSICA 1
1-24
2 3 1 3 1 2
1 2 32 3 1 3 1 2
1 2 3
2 3
ˆˆ ˆ
ˆˆ ˆi j k a a a a a a
a b a a a i j kb b b b b b
b b b
a b a b a
↓ ↓ ↓
∧ = = − +
↓ ↓ ↓
∧ = −
( ) ( ) ( )3 2 1 3 3 1 1 2 2 1ˆˆ ˆb i a b a b j a b a b k
↓ ↓ ↓
− − + −
1.6.1 PROPIETATS DEL PRODUCTE VECTORIAL Siguin a , b i c tres vectors V3 i m un nombre real , ∈m R a b b a∧ = − ∧
( ) ( ) ( )ma b m a b a mb∧ = ∧ = ∧
( )a b c a b a c∧ + = ∧ + ∧
( ) ( ) ( )a b c a c b c+ ∧ = ∧ + ∧
( ) ( )· ·a b c a b c∧ = ∧
( ) ( ) ( )· ·a b c a c b a b c∧ ∧ = −
Exemple
Siguin ˆ ˆˆ ˆ ˆ ˆ2 4 6 ; 3 5 2a i j k b i j k= − + = + −
, determineu el seu producte vectorial.
( ) ( ) ( )
4 6 2 6 2 42 4 6
5 2 3 2 3 53 5 2
8 30 4 18 10 12 22 22 22
ˆˆ ˆ
ˆˆ ˆ
ˆ ˆˆ ˆ ˆ ˆ
i j k
a b i j k
i j k i j k
− −∧ = − = − + =
− −−
− − − − + + = − + +

ANÀLISI VECTORIAL FÍSICA 1
1-25
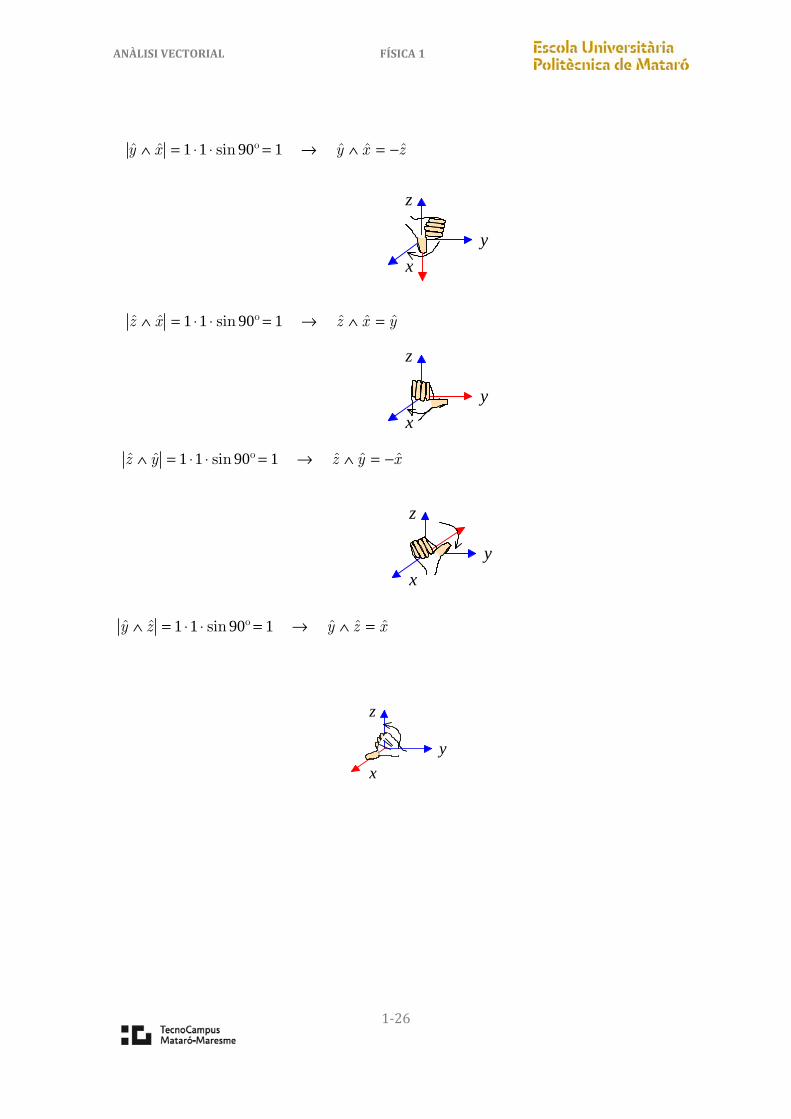
1.6.2 JUSTIFICACIÓ GRÀFICA DEL PRODUCTE VECTORIAL DELS VECTORS
DE LA BASE
Si identifiquem els vectors unitaris de la base canònica per: ˆˆ ˆˆ ˆ ˆ; ;i x j y k z→ → →
el seu producte vectorial es pot il·lustrar amb la regla de la ma dreta se la manera següent:
x y = 11 sin90 = 1; x y = z
xy
z
1 1 90 1ˆ ˆ ˆ ˆ ˆsin ºx y x y z∧ = ⋅ ⋅ = → ∧ =
xz = 11 sin90 = 1 ;xz = − y
xy
z
1 1 90 1ˆ ˆ ˆ ˆ ˆsin ºx z x z y∧ = ⋅ ⋅ = → ∧ = −
ANÀLISI VECTORIAL FÍSICA 1
1-26
yx = 11 sin90 = 1;yx = − z
xy
z
zx = 11 sin90 = 1; zx = y
xy
z
zy = 11 sin90 = 1; zy = − x
xy
z
1 1 90 1ˆ ˆ ˆ ˆ ˆsin ºy x y x z∧ = ⋅ ⋅ = → ∧ = −
1 1 90 1ˆ ˆ ˆ ˆ ˆsin ºz x z x y∧ = ⋅ ⋅ = → ∧ =
1 1 90 1ˆ ˆ ˆ ˆ ˆsin ºz y z y x∧ = ⋅ ⋅ = → ∧ = −
yz = 11 sin90 = 1;yz = x
xy
z
1 1 90 1ˆ ˆ ˆ ˆ ˆsin ºy z y z x∧ = ⋅ ⋅ = → ∧ =

ANÀLISI VECTORIAL FÍSICA 1
1-27
Problemes Proposats 1.1.- Donats els vectors: 3 2 4ˆ ˆ ˆ ˆ;a i j b i j= − = − +
Determineu: a) El vector suma i el seu mòdul. b) El vector diferencia i l'angle que forma amb l'eix OX.
c) El vector 2 3c a b= − i el vector unitari que defineix la direcció i sentit de c
.
1.2.- Donats dos vectors coplanaris i concurrents amb mòduls 5 i 7 i que formen respectivament els següents angles amb l'eix OX : 60º i - 30º. Determineu:
a) El vector suma i el seu mòdul. b) L'angle que forma amb l'eix OX.
1.3.- Si un vector situat en el primer octant forma amb els eixos X ,Y angles de 60º i té de mòdul 4. Determineu:
a) Les seves components. b) L'angle que forma amb l'eix Z.
1.4.- Donats els vectors: a
= (1,-1,2) i b
= (-1,3,4). Calculeu:
a) El producte escalar dels dos vectors. b) L'angle que formen els dos vectors.
c) La projecció de b
sobre a
.
1.5.- Donats dos vectors a
= (2,1,-3) i b
= (1,0,-2) trobar un vector unitari que sigui perpendicular a tots dos.
1.6.- Donats els vectors: a
= (1,0,-1) , b
= (1,3,0) , c
= (2,-1,1) i d
= (0,-2.-1). Determineu:
( ) ( )( ) ( )( ) ( )( ) ( )
1
2
3
4
. · · ·
. ·
. · ·
.
a b c d
a b c d
a b c d
a b c d
−
− ∧ ∧
− ∧
− ∧ ∧ ∧
1.7.- Donats els vectors a
= (1,3,-2) i b
= (1,-1,0).
Determineu: a) El seu producte vectorial. b) L' àrea del paral·lelogram que té els dos vectors com a costats.
c) Un vector c
, de mòdul 6, perpendicular al pla on es troben a
i b
.

ANÀLISI VECTORIAL FÍSICA 1
1-28
1.8.- Donats els vectors a
= (3,-1,-2) i b
= (-1,2,7). Determineu:
a) El cosinus de l'angle que formen. b) El sinus de l'angle que formen .
c) Les components del vector projecció de a
sobre b
ANÀLISI VECTORIAL FÍSICA 1
1-29
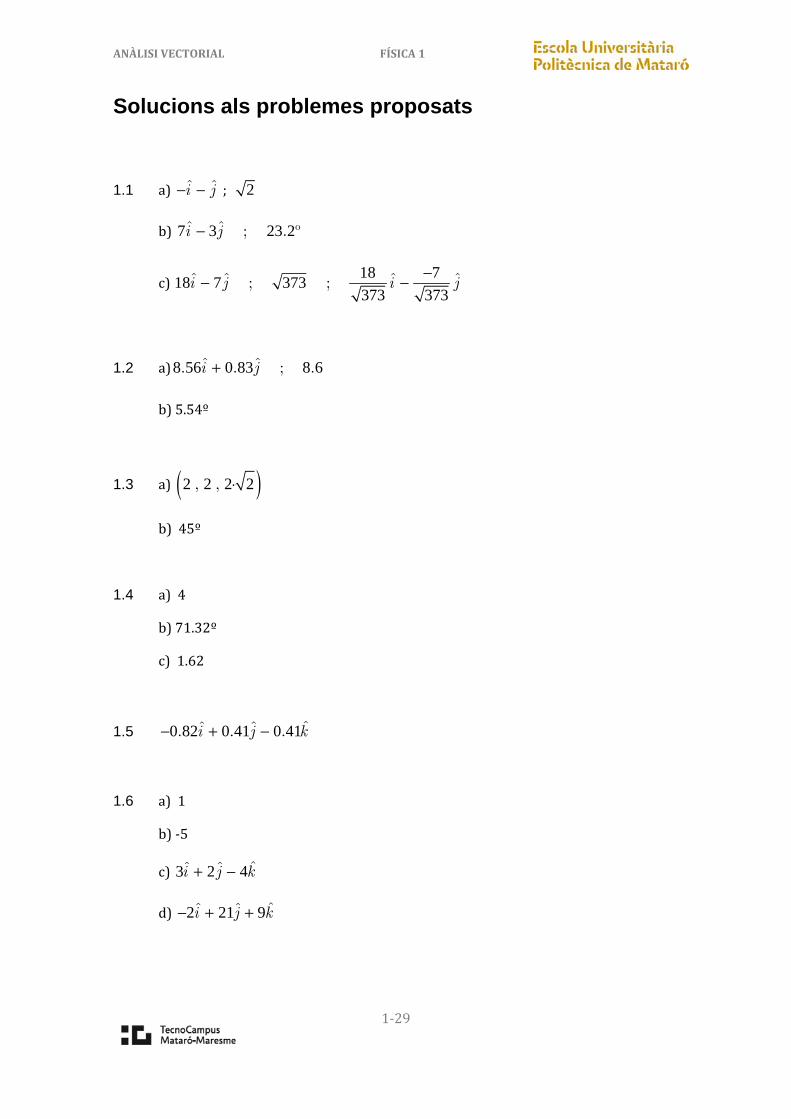
Solucions als problemes proposats
1.1 a) ˆ ˆi j− − ; 2 b) 7 3 23 2ˆ ˆ ; . ºi j− c) 18 718 7 373
373 373−− −ˆ ˆ ˆ ˆ; ;i j i j
1.2 a)8 56 0 83 8 6ˆ ˆ. . ; .i j+ b) 5.54º 1.3 a) ( )2 2 2 2, , · b) 45º 1.4 a) 4 b) 71.32º c) 1.62 1.5 0 82 0 41 0 41ˆˆ ˆ. . .i j k− + − 1.6 a) 1 b) -5 c) 3 2 4ˆˆ ˆi j k+ − d) 2 21 9− + + ˆˆ ˆi j k

ANÀLISI VECTORIAL FÍSICA 1
1-30
1.7 a) 2 2 4ˆˆ ˆi j k− − − b) 24 c) 2 45 2 45 4 9ˆˆ ˆ. . .c i j k= − − − 1.8 a) 0.691 ; 133.6º b) 0.7228 ; 133.6º
c) 0 35 0 7 2 46ˆˆ ˆ. . .i j k− −