![Parte 1: Fisiologia Sensorial...Microsoft PowerPoint - Ppt0000000 [Só de leitura] Author JMiguel Created Date 5/20/2013 4:27:32 PM ...](https://static.fdocuments.es/doc/165x107/5feb7017e6531d35071d3208/parte-1-fisiologia-sensorial-microsoft-powerpoint-ppt0000000-s-de-leitura.jpg)
Tema 14 Aproximación no lineal de funcionespersonal.us.es/jmiguel/MATECO/Web-Matheco-IV-14.pdf ·...
22
Tema 14 Aproximación no lineal de funciones 14.1. Fórmula de Taylor para funciones con una variable Si una función definida en un intervalo es derivable en este intervalo su función derivada asocia a cada punto su derivada. Si esta derivada es derivable en el intervalo podemos calcular su derivada y definir su derivada segunda. Este planteamiento se puede repetir de nuevo con su derivada segunda y de nuevo con ella. La derivación sucesiva de la función nos va a dar información sobre su forma. Recordemos que si la función f ( x) es diferenciable en x 0 el parecido entre la función y la recta tangente a la gráfica nos permite aproximar la función por la diferencial tomando los valores correspondientes a la recta tangente, dy = f 0 ( x 0 ) dx. Al sustituir el incremento de la función, dx = x - x 0 , se obtiene la aproximación lineal de f f ( x) - f ( x 0 ) ≈ f 0 ( x 0 )( x - x 0 ) En esta aproximación se comete un error, correspondiente a la diferencia entre el incremento real de la función y el incremento aproximado que se obtiene mediante la diferencial r x 0 ( x - x 0 ) = 4y z }| { f ( x) - f ( x 0 ) - dy z }| { f 0 ( x 0 )( x - x 0 ) . La aproximación es buena, lo que sucede siempre que la función es diferenciable, si cuando nos apro- ximamos al punto este error tiende a cero más rápido que el incremento de la variable independiente, l´ ım x→x 0 r x 0 ( x - x 0 ) x - x 0 = 0. 457
Transcript of Tema 14 Aproximación no lineal de funcionespersonal.us.es/jmiguel/MATECO/Web-Matheco-IV-14.pdf ·...

Tema 14
Aproximación no lineal de funciones
14.1. Fórmula de Taylor para funciones con una variable
Si una función definida en un intervalo es derivable en este intervalo su función derivada asocia a cada
punto su derivada. Si esta derivada es derivable en el intervalo podemos calcular su derivada y definir su
derivada segunda. Este planteamiento se puede repetir de nuevo con su derivada segunda y de nuevo con
ella. La derivación sucesiva de la función nos va a dar información sobre su forma.
Recordemos que si la función f (x) es diferenciable en x0 el parecido entre la función y la recta tangente
a la gráfica nos permite aproximar la función por la diferencial tomando los valores correspondientes a
la recta tangente, dy = f ′(x0) dx. Al sustituir el incremento de la función, dx = x − x0, se obtiene la
aproximación lineal de f
f (x) − f (x0) ≈ f ′(x0)(x − x0)
En esta aproximación se comete un error, correspondiente a la diferencia entre el incremento real de la
función y el incremento aproximado que se obtiene mediante la diferencial
rx0(x − x0) =
4y︷ ︸︸ ︷f (x) − f (x0) −
dy︷ ︸︸ ︷f ′(x0)(x − x0) .
La aproximación es buena, lo que sucede siempre que la función es diferenciable, si cuando nos apro-
ximamos al punto este error tiende a cero más rápido que el incremento de la variable independiente,
lı́mx→x0
rx0(x − x0)x − x0
= 0.
457

Bloque IV. CÁLCULO DIFERENCIAL E INTEGRAL AMPLIADO
Si en la fórmula de la aproximación lineal añadimos el término correspondiente al error obtenemos la
versión exacta de esta aproximación
f (x) = f (x0) + f ′(x0)(x − x0) + rx0(x − x0)
Esta idea la vamos a extender en una aproximación no lineal de la función por polinomios de grado
superior que recibe el nombre de fórmula de Taylor. En este caso, vamos a exigir que el error que cometemos
tienda a cero más rápido que el incremento de la variable independiente elevado al grado del polinomio
con el que la aproximamos. De esta forma, a medida que aumente el grado del polinomio con el que
aproximamos la función disminuirá el error que cometemos en la aproximación.
Definición 14.1 Sea f : D ⊆ R−→R derivable n veces en x0 ∈ R.
El polinomio de Taylor de f , de grado n, en x0 es:
Pn(x) = f (x0) + f ′(x0)(x − x0) +f ′′(x0)
2(x − x0)2 + · · · +
f (n(x0)n!
(x − x0)n.
que escribiremos muchas veces como Pn(x) =
n∑k=0
f k(x0)k!
(x − x0)k ♣
Ejercicio 14.2 Demostrar que el polinomio de Taylor es el único polinomio cuyas derivadas sucesivas
coinciden con las derivadas de la función en el punto de aproximación.
Solución Para ello calculamos las derivadas sucesivas de un polinomio genérico en potencias de (x − x0)
Pn(x) = a0 + a1(x − x0) + a2(x − x0)2 + · · · + an(x − x0)n
Pn(x) = a0 + a1(x − x0) + a2(x − x0)2 + · · · + an(x − x0)n =⇒ a0 = Pn(x0) = f (x0)
P′n(x) = a1 + 2a2(x − x0) + 3a3(x − x0)2 + · · · + nan(x − x0)n−1 =⇒ a1 = P′n(a) = f ′(a)
P′′n (x) = 2a2 + 3 · 2a3(x − x0) + · · · + n(n − 1)an(x − x0)n−2 =⇒ a2 =P′′n (x0)
2=
f ′′(x0)2
......
Pn)n (x) = n(n − 1)(n − 2) · · · 2 an =⇒ an =
Pn)n (x0)n!
=f n)(x0)
n! ♣
Teorema 14.3 (Fórmula de Taylor) Sea f : D ⊆ R−→R derivable n veces en x0 ∈ R.
PROYECTO MATECO 3.14 Página 458

TEMA 14. APROXIMACIÓN NO LINEAL DE FUNCIONES
La diferencia entre el polinomio de Taylor, Pn(x), y la función, f (x), recibe el nombre de resto
Rn(x) = f (x) − Pn(x) y permite escribir (obsérvese que además de x y de n el error depende de f y x0)
f (x) = f (x0) + f ′(x0)(x − x0) +f ′′(x0)
2(x − x0)2 + · · · +
f (n(x0)n!
(x − x0)n + Rn(x)
En este caso, si f es de clase Cn en un entorno de x0 se tiene lı́mx→x0
Rn(x)(x − x0)n = 0. ♣
La expresión de la fórmula de Taylor es cierta siempre por la propia definición de resto. Lo que el
teorema garantiza es que si la función es de clase n en un entorno del punto el error que cometemos tiende
a cero más rápido que el incremento de la variable independiente elevado a n, de forma que cuantas más
veces sea derivable la función mejor aproximación podremos hacer. Una de las ventajas de la aproximación
mediante la fórmula de Taylor es que tenemos una expresión explícita para el resto que nos va a permitir
acotar el error que cometemos en cada aproximación. Aunque existen diversas expresiones la más utilizada
es la primera que vamos a ver.
Teorema 14.4 (Resto de Lagrange) Sea f : D ⊆ R→ R y f de clase Cn en un entorno de x0.
Si existe f n+1)(x0) entonces existe c entre x0 y x tal que
Rn(x) =f (n+1(c)(n + 1)!
(x − x0)n+1
con x0 < c < x ó x < c < x0 dependiendo de si x es mayor o menor que x0. ♣
Nota Si f es n+1 veces derivable en en un entorno de x0 el resto admite la expresión de Cauchy
Rn(x) =f (n+1(c)
n!(x − c)n(x − x0) con x0 < c < x(ó x < c < x0). ♣
Nota Si f (n+1 es integrable en [x0, x] el resto admite la expresión en forma integral
Rn(x) =
x∫x0
f (n+1(t)n!
(x − t)ndt ♣
Ejemplo 14.5 Obtener el desarrollo de Maclaurin de f (x) = ln(1+ x) (por razones históricas el desarrollo
de Taylor en x0 = 0 recibe el nombre de desarrollo de Maclaurin).
Solución
Calculamos las derivadas hasta orden n de f en x = 0 y sustituimos en la fórmula de Taylor
Página 459 PROYECTO MATECO 3.14
Bloque IV. CÁLCULO DIFERENCIAL E INTEGRAL AMPLIADO
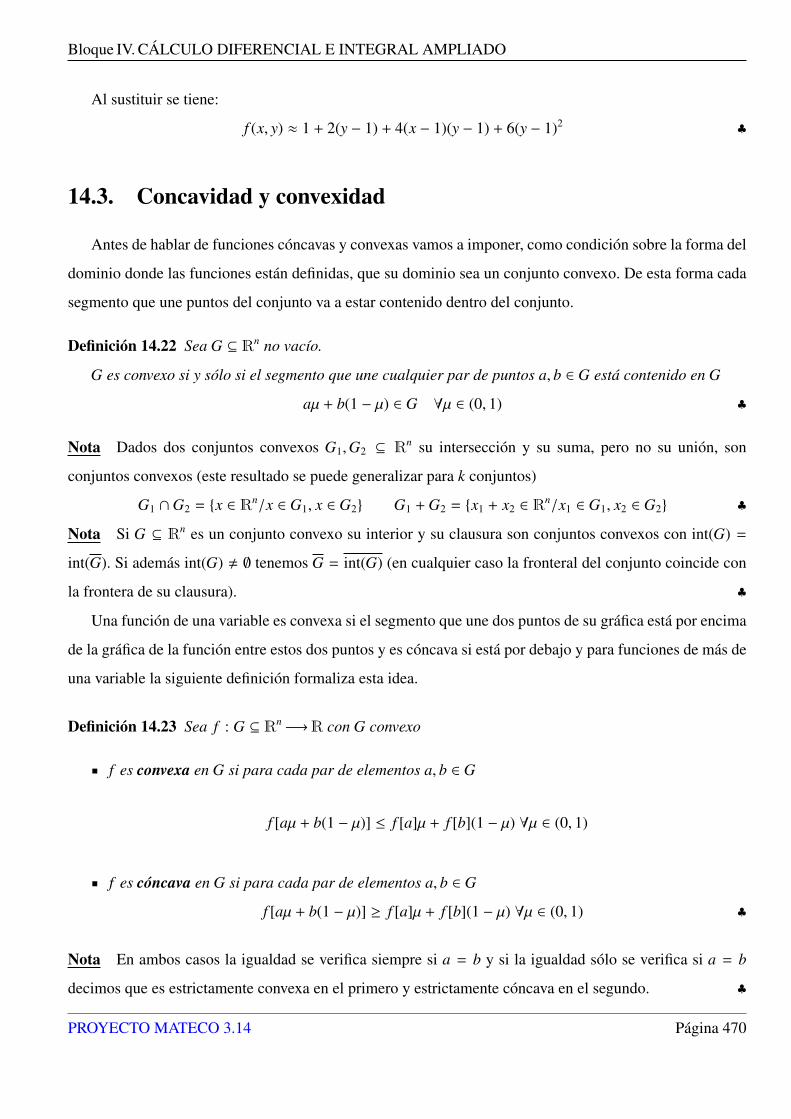
f (x) = ln(1 + x) ⇒ f (0) = ln(1) = 0
f ′(x) =1
1 + x= (1 + x)−1 ⇒ f ′(0) = 1
f ′′(x) = −(1 + x)−2 ⇒ f ′′(0) = −1
f ′′′(x) = 2(1 + x)−3 ⇒ f ′′′(0) = 2...
...
f n)(x) = (−1)n+1(n − 1)!(1 + x)−n ⇒ f n)(0) = (−1)n+1(n − 1)!
f (x) = x −12
x2 +13
x3 − · · · +(−1)n+1
nxn + Rn(x)
Para determinar la expresión del resto calculamos la derivada n+1 en c ∈ (0, x) (ó c ∈ (x, 0)):
f n+1)(x) = (−1)nn!(1 + x)−(n+1) ⇒ Rn(x) =f n+1(c)
(n + 1)!xn+1 =
(−1)nxn+1
(n + 1)(1 + c)(n+1) ♣
Ejemplo 14.6 Obtener el desarrollo de Maclaurin de f (x) = ex y aplicarlo para obtener una aproximación
del número e con un error menor que una milésima.
Solución
Calculamos las derivadas hasta orden n de f en x = 0 y sustituimos en la fórmula de Taylor
f (x) = ex ⇒ f (0) = e0 = 1
f ′(x) = ex ⇒ f ′(0) = e0 = 1
f ′′(x) = ex ⇒ f ′′(0) = e0 = 1...
...
f n)(x) = ex ⇒ f n)(0) = e0 = 1
=⇒ f (x) = ex = 1 + x +
12
x2 + · · · +1n!
xn + Rn(x)
Para determinar la expresión del resto calculamos la derivada n+1 en c ∈ (0, x) (ó c ∈ (x, 0)):
f n+1)(x) = ex ⇒ Rn(x) =ec
(n + 1)!xn+1
Para aproximar el número e tomamos x = 1 con un error para c ∈ (0, 1) que podemos acotar fácilmente ya
que ex es creciente:
Rn(1) =ec
(n + 1)!<
e(n + 1)!
<3
(n + 1)!
PROYECTO MATECO 3.14 Página 460

TEMA 14. APROXIMACIÓN NO LINEAL DE FUNCIONES
Como queremos que el error sea menor que una milésima, entonces
3(n + 1)!
<1
1000⇒ (n + 1)! > 3000 ⇒ n ≥ 6
Por tanto, tomamos√
e ≈ 1 +11!
+12!
+13!
+14!
+15!
+16!
=1957720
= 2.71806 ♣
Ejercicio 14.7 Comprobar que los desarrollos de Maclaurin de seno, coseno y arcotangente son
sen x =
n∑k=0
(−1)k
(2k + 1)!x2k+1 cos x =
n∑k=0
(−1)k
(2k)!x2k arctan x =
n∑k=0
(−1)k
2k + 1x2k+1 ♣
Ejercicio 14.8 Comprobar el desarrollo de Maclaurin de la serie geométrica esa
1 − x=
n∑k=0
axk ♣
Ejercicio 14.9 Hallar el desarrollo de McLaurin de orden n de la función f (x) = e−3x con resto de Lagran-
ge y utilizar el polinomio de orden 4 para obtener una aproximación de 1/e, razonando si el error que se
comete es menor que 0.0001 (nota: 1/e = e−1).
Solución
� Calculamos las derivadas hasta orden n de la función en el punto x = 0
f (x) = e−3x ⇒ f (0) = e0 = 1
f ′(x) = −3e−3x ⇒ f ′(0) = −3e0 = −3
f ′′(x) = (−3)(−3)e−3x ⇒ f ′′(0) = (−3)(−3)e0 = 9
...
f n)(x) = (−3) n· · · (−3)e−3x ⇒ f n)(0) = (−3) n
· · · (−3)e0 = (−3)n = (−1)n3n
Por tanto, sustituyendo en la fórmula de Taylor
f (x) = ex = 1 − 3x +92!
x2 −273!
x3 +814!
x4 + · · · +(−1)n3n
n!xn + Rn(x)
� Para determinar el resto de Lagrange calculamos la derivada n+1 en c ∈ (0, x) (ó c ∈ (x, 0)):
f n+1)(x) = (−3) n+1· · · (−3)e−3x ⇒ Rn(x) =
(−1)n+13n+1e−3c
(n + 1)!xn+1
Página 461 PROYECTO MATECO 3.14

Bloque IV. CÁLCULO DIFERENCIAL E INTEGRAL AMPLIADO
� Para calcular una aproximación de 1/e tomamos x = 1/3
Si sustituimos x = 1/3 en la fórmula de Taylor de orden cuatro
1/e = e−1 ≈ 1 − 3(13
)+
92!
(13
)2
−273!
(13
)3
+814!
(13
)4
= 1 − 1 +12−
16
+124
= 3/8 = 0, 375
Cometemos un error, Rn(1) =(−1)n+13n+1e−3c
(n + 1)!
(−
13
)n+1
De esta forma que, como e−x es decreciente y c ∈ (0, 1/3), tenemos que e−3c < e0 = 1 por tanto
|Rn(1)| <1
(n + 1)!
En nuestro caso es n = 4 y el error es menor que 15! = 0, 0083 que no es menor que una milésima. ♣
Ejercicio 14.10 Hallar el desarrollo de McLaurin de orden n de la función f (x) =1
1 + 2xcon resto de
Lagrange y utilizar el polinomio de orden 4 para obtener una aproximación de 1/1.2 razonando si el error
que se comete es menor que 0.0001.
Solución
� Calculamos las derivadas hasta orden n de la función en el punto x = 0
f (x) =1
1 + 2x= (1 + 2x)−1 ⇒ f (0) = 1−1 = 1
f ′(x) = (−1)2(1 + 2x)−2 ⇒ f ′(0) = −2
f ′′(x) = (−1)2(−2)2(1 + 2x)−3 ⇒ f ′′(0) = (−1)(−2)22
...
f n)(x) = (−1)2(−2)2 · · · (−n)2(1 + 2x)−(n+1) ⇒ f n)(0) = (−1)n2nn!
Por tanto, sustituyendo en la fórmula de Taylor
f (x) = 1 − 2x + 4 x2 − 8 x3 + 16 x4 + · · · + (−1)n2n xn + Rn(x)
� Para determinar la expresión del resto calculamos la derivada n+1 en c ∈ (0, x) (ó c ∈ (x, 0)):
f n+1)(x) = (−1)n+12n+1(n + 1)!(1 + 2x)−(n+2) ⇒ Rn(x) = (−1)n+12n+1(1 + 2c)−(n+2) xn+1
PROYECTO MATECO 3.14 Página 462

TEMA 14. APROXIMACIÓN NO LINEAL DE FUNCIONES
� Para calcular una aproximación de 1/1.2 tomamos x = 0.1 en la fórmula de Taylor de orden 4
1/1.2 =≈ 1 − 2 · 0.1 + 4 · 0.01 − 8 · 0.001 + 16 · 0.0001 = 0.8336
Cometemos un error, Rn(1) = (−1)n+12n+1(1 + 2c)−(n+2)
Como c ∈ (0, 0.1), c es positivo y (1 + 2c)−(n+2) < 1 tenemos que
|Rn(1)| < 2n+10.1n+1
En nuestro caso es n = 4 y el error es menor que 250.15 = 0.00032 que no es menor que una milésima.♣
Ejercicio 14.11 Hallar el desarrollo de Taylor hasta grado n de la función f (x) = ln(x) en un entorno de
x = 1 dando el resto en forma infinitesimal.
Solución Calculamos las derivadas hasta orden n de la función en el punto x = 1
f (x) = ln(x) ⇒ f (1) = ln(1) = 0
f ′(x) =1x⇒ f ′(1) = 1
f ′′(x) = −1x2 ⇒ f ′′(1) = −1
f ′′′(x) =2x3 ⇒ f ′′′(1) = 2
...
f n)(x) = (−1)n+1 (n − 1)!xn ⇒ f n)(1) = (−1)n+1(n − 1)!
Sustituyendo en la fórmula de Taylor
f (x) = (x − 1) −12
(x − 1)2 +13
(x − 1)3 − · · · +(−1)n+1
n(x − 1)n + o(x − 1)n+1 ♣
Ejercicio 14.12 Hallar el desarrollo de Taylor de grado n de la función f (x) =√
x en un entorno de x = 1
con resto de Lagrange y utilizarlo para calcular una aproximación de√
2, razonando si el error que se
comete es menor que una milésima.
Solución Calculamos las derivadas hasta orden n de la función en el punto x = 0
Página 463 PROYECTO MATECO 3.14

Bloque IV. CÁLCULO DIFERENCIAL E INTEGRAL AMPLIADO
f (x) = x1/2 ⇒ f (1) = 1
f ′(x) =(
12
)x−1/2 ⇒ f ′(1) = 1
2
f ′′(x) =(
12
) (−1
2
)x−3/2 ⇒ f ′′(1) = −1
4
f ′′′(x) =(
12
) (−1
2
) (−3
2
)x−5/2 ⇒ f ′′′(1) = 3
8
f ′′′′(x) =(
12
) (−1
2
) (−3
2
) (−5
2
)x−7/2 ⇒ f ′′′′(1) = −15
16
...
f n)(x) =(
12
) (−1
2
)n−1· · ·
(−2n−3
2
)x−(2n−1)/2 ⇒ f n)(1) = (−1)n−1 (2n−3)!!
2n = (−1)n−1 (2n−2)!2n(n−1)!2n−1
f n)(1) = (−1)n−1 (2n − 2)!22n−1(n − 1)!
Por tanto, sustituyendo en la fórmula de Taylor
f (x) = 1 +12
(x − 1) −18
(x − 1)2 +1
16(x − 1)3 + · · · + (−1)n−1 (2n − 2)!
22n−1n!(n − 1)!(x − 1)n + Rn(x)
Para determinar la expresión del resto calculamos la derivada n+1 en c ∈ (1, x) (ó c ∈ (x, 1))
f n+1)(x) = (−1)n (2n)!22n+1n!
(x − 1)−(2n+1)/2 ⇒ Rn(x) = (−1)n (2n)!22n+1(n + 1)!n!
c−(2n+1)/2(x − 1)n+1
Para calcular una aproximación de√
1.1 tomamos x = 0.1 en la fórmula de Taylor de orden 3
√1.1 =≈ 1 +
12
0.1 −18
0.01 +1
160.001 = 1.04881
Como c ∈ (1, 1.1) tenemos c−(2n+1)/2 < 1 tenemos que
|Rn(1.1)| <(2n)!
22n+1(n + 1)!n!0.1n+1
En nuestro caso es n = 3 y el error es menor que 51280.14 = 3.90625 ∗ 10−6 que si es menor que una
milésima. ♣
Ejercicio 14.13 Hallar el desarrollo de McLaurin de orden n de f (x) = 2−x con resto de Lagrange.
PROYECTO MATECO 3.14 Página 464

TEMA 14. APROXIMACIÓN NO LINEAL DE FUNCIONES
Solución
Calculamos las derivadas hasta orden n de la función en el punto x = 0
f (x) = 2−x ⇒ f (0) = 20 = 1
f ′(x) = −2−x ln 2 ⇒ f ′(0) = − ln 2
f ′′(x) = 2−x ln2 2 ⇒ f ′′(0) = ln2 2
...
f n)(x) = (−1) n· · · (−1)2−x(ln 2) n
· · · (ln 2) ⇒ f n)(0) = (−1)n(ln 2)n
Por tanto, sustituyendo en la fórmula de Taylor
f (x) = 2−x = 1 − x ln 2 + x2 ln2 2 − · · · +(−1)n(ln 2)n
n!xn + Rn(x)
Para determinar el resto de Lagrange calculamos la derivada n+1 en c ∈ (0, x) (ó c ∈ (x, 0)):
f n+1)(x) = (−1)n+1(ln 2)n+12x ⇒ Rn(x) =(−1)n+1(ln 2)n+12c
(n + 1)!xn+1 ♣
Ejercicio 14.14 Hallar el desarrollo de McLaurin de orden tres de la función f (x) =√
1 + x con el resto
de Lagrange y utilizarlo para obtener una aproximación de√
1.5 razonando si el error que se comete es
menor que una milésima.
Ejercicio 14.15 Obtener el polinomio de Taylor de grado n con resto de Lagrange de las siguientes fun-
ciones en un entorno del punto que se indica y utilizarlo para obtener una aproximación del valor también
indicado razonando si el error que se comete es menor que una diezmilésima.
(a) f (x) =√
x + 2 x = 2√
4.01 (b) f (x) = e1−2x x = 12 e0.2.
14.2. Fórmula de Taylor para funciones con varias variables
En una función con varias variables, al igual que con una función de una variable, se considera que la
aproximación lineal mediante la diferencial es buena si el error que se comete en esta aproximación tiende
a cero más rápido de lo que lo hace el incremento de las variables independientes, donde el tamaño del
incremento se mide mediante la norma del propio incremento. La bondad de la aproximación no lineal
viene determinada por la rapidez con la que tiende a cero esta norma elevada al orden del polinomio con
Página 465 PROYECTO MATECO 3.14

Bloque IV. CÁLCULO DIFERENCIAL E INTEGRAL AMPLIADO
el que aproximamos. Para construir esta aproximación vamos a introducir previamente las diferenciales
sucesivas, que aparecen al considerar las distintas parciales de orden superior.
Si escribimos la diferencial de la función f en el punto x0 como
D f (x0)[(dx1, . . . , dxn)] =∂ f∂x1
(x0)dx1 + . . . +∂ f∂xn
(x0)dxn =
n∑i=1
∂ f∂xi
(x0)dxi.
la diferencial segunda se define a partir de las derivadas parciales de segundo orden como
D2 f (x0)[(dx1, . . . , dxn)] =
n∑i1,i2=1
∂2 f∂xi1∂xi2
(x0)dxi1dxi2 .
Esta diferencial es suma de todas y cada una de las derivadas de segundo orden multiplicadas por los
incrementos correspondientes a las variables respecto a las que se deriva. Así, la diferencial segunda de una
función f (x, y) es
D2 f (x0, y0)[dx, dy] =∂2 f∂x2 (x0, y0)dx2 +
∂2 f∂y∂x (x0, y0)dxdy +
∂2 f∂x∂y (x0, y0)dydx +
∂2 f∂y2 (x0, y0)dy2
Esta diferencial puede escribirse en términos de la matriz hessiana, de forma que la diferencial segunda
corresponde a una forma cuadrática de matriz H f (x0), que es simétrica si la función es de clase C2
D2 f (x0, y0)[dx, dy] = (dx dy)
∂2 f∂ x2 (x0, y0) ∂2 f
∂ y∂ x (x0, y0)
∂2 f∂ x∂ y (x0, y0) ∂2 f
∂ y2 (x0, y0)
dx
dy
Definición 14.16 Se define la diferencial sucesiva de orden m como la suma de todas y cada una de las
derivadas de orden m multiplicadas por los incrementos correspondientes a las variables respecto de las
que se deriva.
Dm f (x0)[(dx1, . . . , dxn)] =
n∑i1,...,im=1
∂m f∂ xi1 · · · ∂ xim
(x0)dxi1 · · · dxim . ♣
Ejemplo 14.17 Obtener las diferenciales de primer y segundo orden de f (x, y) = sen(xy2).
PROYECTO MATECO 3.14 Página 466

TEMA 14. APROXIMACIÓN NO LINEAL DE FUNCIONES
Solución
Las derivadas de primer orden y la diferencial son
∂ f∂ x (x, y) = y2 cos(xy2)∂ f∂ y (x, y) = 2xy cos(xy2)
=⇒ D f (x, y)[dx, dy] = y2 cos(xy2)dx + 2xy cos(xy2)dy
En términos del vector gradiente la diferencial es
D f (x, y)[dx, dy] =(y2 cos(xy2) 2xy cos(xy2)
) dx
dy
Las derivadas de segundo orden son
∂2 f∂ x∂ x (x, y) = −y4 sen(xy2) ∂2 f
∂ y∂ x (x, y) = 2y cos(xy2) − 2xy3 sen(xy2)∂2 f∂ x∂ y (x, y) = 2y cos(xy2) − 2xy3 sen(xy2) ∂2 f
∂ y∂ x (x, y) = 2x cos(xy2) − 4x2y2 sen(xy2)
Por tanto la diferencial segunda es
D2 f (x, y)[dx, dy] = −y4 sen(xy2)dx2 + 2(2y cos(xy2)− 2xy3 sen(xy2))dxdy + 2x cos(xy2)− 4x2y2 sen(xy2)dy2
La diferencial en términos de la matriz hessiana queda
D2 f (x, y)[dx, dy] = (dx dy)
−y4 sen(xy2) 2y cos(xy2) − 2xy3 sen(xy2)
2y cos(xy2) − 2xy3 sen(xy2) 2x cos(xy2) − 4x2y2 sen(xy2)
dx
dy
Las diferenciales de orden superior se obtienen siguiendo el mismo procedimiento a partir de las corres-
pondientes derivadas aunque no se expresan matricialmente. ♣
Proposición 14.18 (Fórmula de Taylor para funciones de varias variables) Sea f : D ⊆ Rn−→R de clase
Cm en un abierto conteniendo al segmento cerrado que une x0 y x con x0, x ∈ D
f (x) = f (x0) + D f (x0)[x − x0] +12
D2 f (x0)[x − x0] + · · · +1
m!Dm f (x0)[x − x0] + Rm(x) con
lı́mx→x0
Rm(x)||x − x0||
m = 0
Página 467 PROYECTO MATECO 3.14

Bloque IV. CÁLCULO DIFERENCIAL E INTEGRAL AMPLIADO
Además, si f es de clase Cm+1 en dicho abierto el resto se puede expresar para c ∈ Rn perteneciente al
segmento abierto que une x0 y x como
Rm(x) =1
(m + 1)!Dm+1 f (c)[x − x0] ♣
Corolario 14.19 Sea f : D ⊆ Rn−→R de clase C2 en un abierto que contenga al segmento cerrado que
une x0 y x con x0, x ∈ D.
f (x) = f (x0) + J f (x0)(x − x0) +12
(x − x0)tH f (x0)(x − x0) + R2(x) con lı́mx→x0
R2(x)||x − x0||
2 = 0.
Ejemplo 14.20 Obtener, si es posible, el desarrollo de Taylor de orden 2 de la función
f (x, y) = sen(xy) en un entorno del punto (0, π).
Solución
el valor de la función en el punto: f (0, π) = sen(xy)|(0,π) = 0
el valor de las derivadas parciales de primer orden en el punto:∂ f∂x
(0, π) = y cos(xy)|(0,π) = π
∂ f∂y
(0, π) = x cos(xy)|(0,π) = 0
el valor de las derivadas parciales de segundo orden en el punto:∂2 f∂x2 (0, π) = −y2 sen(xy)
∣∣∣(0,π)
= 0
∂ f 2
∂x∂y(0, π) =
∂ f 2
∂y∂x(0, π) = cos(xy) − xy sen(xy)|(0,π) = 1
∂2 f∂y2 (0, π) = −x2 sen(xy)
∣∣∣(0,π)
= 0
Como las derivadas de segundo orden son continuas la función es de clase C2 en R2 y, en particular, en un
entorno del punto. Así, podemos aproximar la función por el polinomio de Taylor de segundo orden.
En forma de polinomio f (x, y) ≈ 0 + πx + 0(y − π) +12
(0x2 + 2 · 1x(y − π) + 0(y − π)2
)
En forma matricial f (x, y) ≈ 0 + (π 0)
x
y − π
+12
(x y − π)
0 1
1 0
x
y − π
Al desarrollar se tiene:
π x + x(y − π) ♣
PROYECTO MATECO 3.14 Página 468

TEMA 14. APROXIMACIÓN NO LINEAL DE FUNCIONES
Ejercicio 14.21 Obtener el polinomio de Taylor de grado dos de la función f (x, y) = y2xy en un entorno
del punto (1, 1) utilizando derivación logarítmica
Solución
El valor de la función en el punto es f (1, 1) = y2xy∣∣∣(1,1)
= 1
Para aplicar derivación logarítmica tomamos logaritmos en la función y obtenemos
ln ( f (x, y)) = ln(y2xy
)= 2xy ln(y)
El valor de las derivadas parciales de primer orden lo obtenemos derivando la ecuación y despejando
1f (x, y)
∂ f∂x
(x, y) = 2y ln(y) =⇒∂ f∂x
(x, y) = 2y ln(y) f (x, y)
1f (x, y)
∂ f∂y
(x, y) = 2x ln(y) + 2x =⇒∂ f∂y
(x, y) = (2x ln(y) + 2x) f (x, y)
El valor de las derivadas parciales de primer orden en el punto será
∂ f∂x
(1, 1) = 0∂ f∂y
(1, 1) = 2
Las derivadas parciales de segundo orden se obtienen derivando las parciales de primer orden
∂2 f∂x2 (x, y) = 2y ln(y)
∂ f∂x
(x, y)
∂2 f∂y∂x
(x, y) = (2 ln(y) + 2) f (x, y) + 2y ln(y)∂ f∂y
(x, y)
∂2 f∂y2 (x, y) =
(2xy
)f (x, y) + (2x ln(y) + 2x)
∂ f∂y
(x, y)
El valor de las derivadas parciales de segundo orden en el punto será
∂2 f∂x2 (1, 1) = 0
∂2 f∂x∂y
(1, 1) =∂2 f∂y∂x
(1, 1) = 4∂2 f∂y2 (1, 1) = 6
La función y las derivadas de primer y segundo orden son continuas en D( f ) = {(x, y)/y > 0}, por lo
que la función es de clase C2 en un entorno del punto y podemos aproximar la función por el polinomio de
Taylor de segundo orden:
f (1, 1)+∂ f∂x
(1, 1)(x−1)+∂ f∂y
(1, 1)(y−1)+12
(∂2 f∂x2 (1, 1)(x − 1)2 + 2
∂2 f∂y∂x
(1, 1)(x − 1)(y − 1) +∂2 f∂y2 (1, 1)(y − 1)2
)Página 469 PROYECTO MATECO 3.14
Bloque IV. CÁLCULO DIFERENCIAL E INTEGRAL AMPLIADO
Al sustituir se tiene:
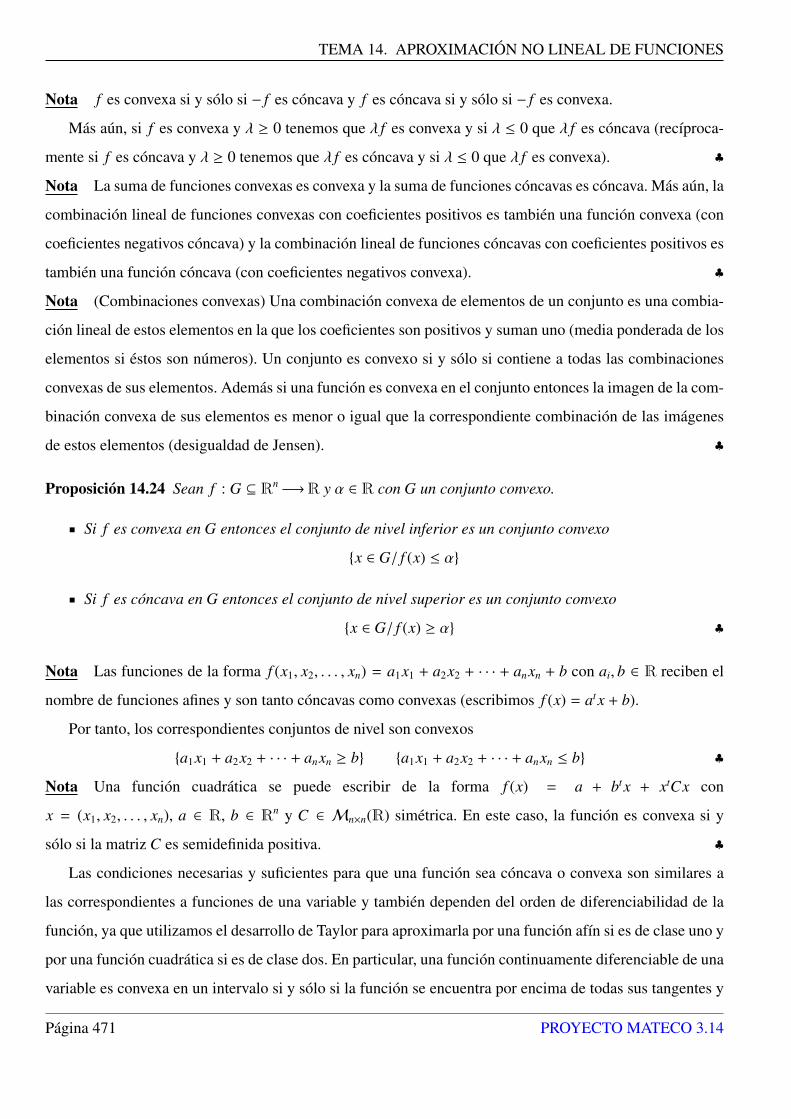
f (x, y) ≈ 1 + 2(y − 1) + 4(x − 1)(y − 1) + 6(y − 1)2 ♣
14.3. Concavidad y convexidad
Antes de hablar de funciones cóncavas y convexas vamos a imponer, como condición sobre la forma del
dominio donde las funciones están definidas, que su dominio sea un conjunto convexo. De esta forma cada
segmento que une puntos del conjunto va a estar contenido dentro del conjunto.
Definición 14.22 Sea G ⊆ Rn no vacío.
G es convexo si y sólo si el segmento que une cualquier par de puntos a, b ∈ G está contenido en G
aµ + b(1 − µ) ∈ G ∀µ ∈ (0, 1) ♣
Nota Dados dos conjuntos convexos G1,G2 ⊆ Rn su intersección y su suma, pero no su unión, son
conjuntos convexos (este resultado se puede generalizar para k conjuntos)
G1 ∩G2 = {x ∈ Rn/x ∈ G1, x ∈ G2} G1 + G2 = {x1 + x2 ∈ Rn/x1 ∈ G1, x2 ∈ G2} ♣
Nota Si G ⊆ Rn es un conjunto convexo su interior y su clausura son conjuntos convexos con int(G) =
int(G). Si además int(G) , ∅ tenemos G = int(G) (en cualquier caso la fronteral del conjunto coincide con
la frontera de su clausura). ♣
Una función de una variable es convexa si el segmento que une dos puntos de su gráfica está por encima
de la gráfica de la función entre estos dos puntos y es cóncava si está por debajo y para funciones de más de
una variable la siguiente definición formaliza esta idea.
Definición 14.23 Sea f : G ⊆ Rn−→R con G convexo
f es convexa en G si para cada par de elementos a, b ∈ G
f [aµ + b(1 − µ)] ≤ f [a]µ + f [b](1 − µ) ∀µ ∈ (0, 1)
f es cóncava en G si para cada par de elementos a, b ∈ G
f [aµ + b(1 − µ)] ≥ f [a]µ + f [b](1 − µ) ∀µ ∈ (0, 1) ♣
Nota En ambos casos la igualdad se verifica siempre si a = b y si la igualdad sólo se verifica si a = b
decimos que es estrictamente convexa en el primero y estrictamente cóncava en el segundo. ♣
PROYECTO MATECO 3.14 Página 470
TEMA 14. APROXIMACIÓN NO LINEAL DE FUNCIONES
Nota f es convexa si y sólo si − f es cóncava y f es cóncava si y sólo si − f es convexa.
Más aún, si f es convexa y λ ≥ 0 tenemos que λ f es convexa y si λ ≤ 0 que λ f es cóncava (recíproca-
mente si f es cóncava y λ ≥ 0 tenemos que λ f es cóncava y si λ ≤ 0 que λ f es convexa). ♣
Nota La suma de funciones convexas es convexa y la suma de funciones cóncavas es cóncava. Más aún, la
combinación lineal de funciones convexas con coeficientes positivos es también una función convexa (con
coeficientes negativos cóncava) y la combinación lineal de funciones cóncavas con coeficientes positivos es
también una función cóncava (con coeficientes negativos convexa). ♣
Nota (Combinaciones convexas) Una combinación convexa de elementos de un conjunto es una combia-
ción lineal de estos elementos en la que los coeficientes son positivos y suman uno (media ponderada de los
elementos si éstos son números). Un conjunto es convexo si y sólo si contiene a todas las combinaciones
convexas de sus elementos. Además si una función es convexa en el conjunto entonces la imagen de la com-
binación convexa de sus elementos es menor o igual que la correspondiente combinación de las imágenes
de estos elementos (desigualdad de Jensen). ♣
Proposición 14.24 Sean f : G ⊆ Rn−→R y α ∈ R con G un conjunto convexo.
Si f es convexa en G entonces el conjunto de nivel inferior es un conjunto convexo
{x ∈ G/ f (x) ≤ α}
Si f es cóncava en G entonces el conjunto de nivel superior es un conjunto convexo
{x ∈ G/ f (x) ≥ α} ♣
Nota Las funciones de la forma f (x1, x2, . . . , xn) = a1x1 + a2x2 + · · · + anxn + b con ai, b ∈ R reciben el
nombre de funciones afines y son tanto cóncavas como convexas (escribimos f (x) = atx + b).
Por tanto, los correspondientes conjuntos de nivel son convexos
{a1x1 + a2x2 + · · · + anxn ≥ b} {a1x1 + a2x2 + · · · + anxn ≤ b} ♣
Nota Una función cuadrática se puede escribir de la forma f (x) = a + btx + xtCx con
x = (x1, x2, . . . , xn), a ∈ R, b ∈ Rn y C ∈ Mn×n(R) simétrica. En este caso, la función es convexa si y
sólo si la matriz C es semidefinida positiva. ♣
Las condiciones necesarias y suficientes para que una función sea cóncava o convexa son similares a
las correspondientes a funciones de una variable y también dependen del orden de diferenciabilidad de la
función, ya que utilizamos el desarrollo de Taylor para aproximarla por una función afín si es de clase uno y
por una función cuadrática si es de clase dos. En particular, una función continuamente diferenciable de una
variable es convexa en un intervalo si y sólo si la función se encuentra por encima de todas sus tangentes y
Página 471 PROYECTO MATECO 3.14

Bloque IV. CÁLCULO DIFERENCIAL E INTEGRAL AMPLIADO
una función de dos variables dos veces diferenciable con continuidad es convexa si la función se encuentra
por encima de todos sus planos tangentes (en general una función de varias variables es convexa si está por
encima de sus hiperplanos tangentes).
Proposición 14.25 (condición necesaria y suficiente de convexidad con diferenciabilidad)
Sea f : G ⊆ Rn−→R diferenciable en G con G convexo no vacío.
f es convexa si y sólo si para cualquier par de puntos a, b ∈ G
f (b) − f (a) ≥ ∇ f (a) · (b − a) ♣
Nota Si la desigualdad es estricta f es estrictamente convexa. ♣
Nota f es cóncava si y sólo la desigualdad se da en sentido contrario (estrictamente cóncava si la de-
sigualdad es estricta). ♣
Una función de una variable dos veces derivable es convexa en un intervalo si y sólo si su segunda
derivada es no negativa en ese intervalo y una función de varias variables dos veces diferenciable con
continuidad es convexa en un conjunto convexo si y sólo si su matriz hessiana es semidefinida positiva en
el interior de ese conjunto convexo.
Proposición 14.26 (condición necesaria y suficiente de convexidad con diferenciabilidad de orden dos)
Sea f : G ⊆ Rn−→R de clase C2 en G con G convexo no vacío.
f es convexa si y sólo si la forma cuadrática asociada al hessiano de f es semidefinida positiva en todos
los puntos del interior (H f (x) S DP ∀x ∈ int(G)).
Si además esta forma cuadrática es definida positiva la función es estrictamente convexa (el recíproco
no es cierto). ♣
Nota f es cóncava si y sólo la forma cuadrática asociada al hessiano de f es semidefinida negativa en
todos los puntos del interior (si es definida negativa la función es estrictamente cóncava). ♣
Nota Por abuso de notación para hablar del signo de la forma cuadrática asociada al hessiano de f habla-
remos del signo de su matriz hessiana, H f (x). ♣
Proposición 14.27 Sea f : Rn−→R convexa en Rn.
Si g : Rm→ Rn es afín entonces f ◦ g(x) = f (g(x)) es convexa. ♣
Proposición 14.28 (Composición de funciones convexas) Sea f : G ⊆ Rn−→R convexa en G, con G
convexo, y h : I ⊆ f (G) ⊆ R→ R convexa en I, con I un el intervalo.
Si h es creciente en I entonces h ◦ f (x) = h( f (x)) es convexa en G. ♣
PROYECTO MATECO 3.14 Página 472

TEMA 14. APROXIMACIÓN NO LINEAL DE FUNCIONES
Ejercicio 14.29 Determinar si los siguientes conjuntos son convexos:
A = {(x, y) ∈ R2 : x + y = 2} B = {(x, y) ∈ R2 : 3x + 2y ≥ 1}
C = {(x, y, z) ∈ R3 : x2 + y2 ≤ 5, x ≥ 0, y ≥ 0} D = {(x, y) ∈ R2 : 1 ≤ x2
4 + y2 ≤ 9}
E = {(x, y) ∈ S : x ≥ 0, y ≥ 0, xy ≥ 1}
Ejercicio 14.30 Dados los conjuntos A = {(x, y) ∈ R2 : x2 +y2
4 ≤ 4}, B = {(x, y) ∈ R2 : x + y ≥ 3},
C = {(x, y) ∈ R2 : (x − 2)2 + (y − 1)2 = 9} y D = {(x, y) ∈ R2 : x2 > y}.
Representar gráficamente los conjuntos siguientes e indicar si son convexos:
A, B, C, D, C ∩ D, A ∪C ∪ D, A ∩ B ∩C, B ∩ D, A ∩ B ∩C ∩ D.
Ejercicio 14.31 Estudiar la convexidad o concavidad de las siguientes funciones:
(a) f (x) = ax + b (b) f (x) = x2
(c) f (x, y) = ax + by + c (d) f (x, y) = 2x − y − x2 + 2xy − y2
(e) f (x, y) = e2x+y (f) f (x, y) = 14x − 12 x2 + 10y − 1
2y2
(g) f (x, y, z) = 2x + ey + 3z (h) f (x, y, z) = ax2 + by2 + cz2 + d
Página 473 PROYECTO MATECO 3.14

Bloque IV. CÁLCULO DIFERENCIAL E INTEGRAL AMPLIADO
Ejercicios del tema
Ejercicio 14.32 Comprobamos que la ecuación ex+y+z − 2xyz2 = e define a z como función implícita de x e
y en un entorno del punto P(0, 0, 1) y obtener su desarrollo de Taylor de orden 2 entorno al punto adecuado
Solución
� Para comprobar que la ecuación define a z como función implícita de x e y
Comprobamos que la ecuación es satisfecha por el punto F(0, 0, 1) = e
Comprobamos que la función es de clase C1 calculando sus derivadas parciales y viendo que son
continuas (no es necesario ya que esta función es suma de una exponencial y un polinomio y, por
tanto, es de clase C∞(R3))
∂F∂x
(x, y, z) = ex+y+z − 2yz2 ∂F∂y
(x, y, z) = ex+y+z − 2xz2 ∂F∂z
(x, y, z) = ex+y+z − 4xyz
Comprobamos que la derivada respecto a la variable que queremos despejar es distinta de cero∂F(0, 0, 1)
∂z= e , 0
Podemos ahora afirmar que existe una única función z = z(x, y) de clase C∞ en un entorno del punto
(0, 0) tal que z(0, 0) = 1 y tal que en dicho entorno F(x, y, z(x, y)) = 0
� Para obtener las derivadas parciales derivamos la ecuación considerando que z depende de x e y al
aplicar la regla de la cadena
Derivando parcialmente respecto de x
ex+y+z − 2yz2 + (ex+y+z − 4xyz)z′x = 0 (∗)
Derivando parcialmente respecto de y
ex+y+z − 2xz2 + (ex+y+z − 4xyz)z′y = 0 (∗∗)
Sustituyendo x = 0, y = 0 z = 1 y despejando tenemos que z′x(0, 0) = −1 y z′y(0, 0) = −1 con lo que
∇z(0, 0) =
−1
−1
PROYECTO MATECO 3.14 Página 474

TEMA 14. APROXIMACIÓN NO LINEAL DE FUNCIONES
I Para obtener las derivadas parciales de segundo orden se derivan las expresiones (*) y (**).
Derivando parcialmente (*) respecto de x
ex+y+z + (ex+y+z − 4yz)z′x + [ex+y+z − 4yz + (ex+y+z − 4xy)z′x]z′x + (ex+y+z − 4xyz)z′′xx = 0
Derivando parcialmente (*) respecto de y
ex+y+z + (ex+y+z − 4xz)z′y + [ex+y+z − 4yz + (ex+y+z − 4xy)z′x]z′y + (ex+y+z − 4xyz)z′′yx = 0
Derivando parcialmente (**) respecto de x (no es necesario)
ex+y+z − 2z2 + (ex+y+z − 4yz)z′y + [ex+y+z − 4xz + (ex+y+z − 4xy)z′y]z′x + (ex+y+z − 4xyz)z′′xy = 0
Derivando parcialmente (**) respecto de y
ex+y+z + (ex+y+z − 4xz)z′y + [ex+y+z − 4xz + (ex+y+z − 4xy)z′y]z′y + (ex+y+z − 4xyz)z′′xy = 0
Sustituyendo x = 0, y = 0, z = 1, z′x = −1 z′y = −1 y despejando tenemos que
z′′xx = 0 z′′yx = z′′xy = 2/e z′′yy = 0
con lo que
Hz(0, 0) =
0 2/e
2/e 0
� Otra forma de resolver el problema es obteniendo las derivadas parciales derivando directamente la
ecuación considerando en todo momento que z depende de x e y.
Derivando parcialmente respecto de x
(1 + z′x)ex+y+z − 4z′xxyz − 2yz2 = 0 (∗)
Derivando parcialmente respecto de y
(1 + z′y)ex+y+z − 4z′yxyz − 2xz2 = 0 (∗∗)
Página 475 PROYECTO MATECO 3.14

Bloque IV. CÁLCULO DIFERENCIAL E INTEGRAL AMPLIADO
Derivando parcialmente (*) respecto de x
(1 + z′x)2ex+y+z + z′xxex+y+z − 4z′x
2xy − 8z′xyz − 4z′xxxyz = 0
Derivando parcialmente (*) respecto de y
z′xyex+y+z + (1 + z′x)(1 + z′y)ex+y+z − 4z′xz
′yxy − 4z′xxz − 4z′yyz − 4z′xyxyz − 2z2 = 0
Derivando parcialmente (**) respecto de x (no es necesario)
z′xyex+y+z + (1 + z′x)(1 + z′y)ex+y+z − 4z′xz
′yxy − 4z′xxz − 4z′yyz − 4z′xyxyz − 2z2 = 0
Derivando parcialmente (**) respecto de y
(1 + z′y)2ex+y+z + z′yyex+y+z − 4z′y
2xy − 8z′yxz − 4z′yyxyz = 0
� La función es de clase C2 en un entorno del punto y podemos aproximar la función por el polinomio de
Taylor de segundo orden:
z(0, 0) +∂z∂x
(0, 0)x +∂z∂y
(0, 0)y +12
(∂2z∂x2 (0, 0)x2 + 2
∂2z∂y∂x
(0, 0)xy +∂2z∂y2 (0, 0)y2
)
Al sustituir se tiene:
z(x, y) ≈ 1 − x − y +2e
xy ♣
Ejercicio 14.33 Obtener el desarrollo de Taylor de la función f (x, y) = xy en un entorno del punto (1, 1)
hasta segundo orden y aplicar el resultado para calcular (1.1)1.02.
Solución
Calculamos las derivadas parciales hasta segundo orden
D1 f (x, y) = y xy−1; D2 f (x, y) = xy ln(x)
D11 f (x, y) = y(y − 1) xy−2; D12 f (x, y) = D21 f (x, y) = y xy−1 ln(x) + xy−1; D22 f (x, y) = xy ln2(x)
D1 f (1, 1) = 1; D2 f (1, 1) = 0; D11 f (1, 1) = 0; D12 f (1, 1) = D21 f (1, 1) = 1; D22 f (1, 1) = 0
PROYECTO MATECO 3.14 Página 476

TEMA 14. APROXIMACIÓN NO LINEAL DE FUNCIONES
Como estas parciales son continuas en un entorno del punto dado tenemos
f (x, y) = 1 + (x − 1) +12· 2(x − 1)(y − 1) + R2(x, y)
f (x, y) = 1 + (x − 1) + (x − 1)(y − 1) + R2(x, y)
Por tanto (1.1)1.02 ≈ 1 + (1.1 − 1) + (1.1 − 1)(1.02 − 1) = 1 + 0.1 + 0.002 ⇒ (1.1)1.02 ≈ 1.102 ♣
Ejercicio 14.34 Obtener el desarrollo de Taylor de orden 2 de la función f (x, y) = sen2(xy) en un entorno
del punto (0, π).
Solución
el valor de la función en el punto: f (0, π) = sen2(xy)∣∣∣(0,π)
= 0
el valor de las derivadas parciales de primer orden en el punto:∂ f∂x
(0, π) = 2y sen(xy) cos(xy)|(0,π) = 0∂ f∂y
(0, π) = 2x sen(xy) cos(xy)|(0,π) = 0
el valor de las derivadas parciales de segundo orden en el punto:∂2 f∂x2 (0, π) = 2y2 cos2(xy) − 2y2 sen2(xy)
∣∣∣(0,π)
= 2π2
∂ f 2
∂x∂y(0, π) =
∂ f 2
∂y∂x(0, π) = 2 sen(xy) cos(xy) + 2y2 cos2(xy) − 2y2 sen2(xy)
∣∣∣(0,π)
= 2π2
∂2 f∂y2 (0, π) = 2x2 cos2(xy) − 2x2 sen2(xy)
∣∣∣(0,π)
= 0
La función es de clase C∞ en R2 y, en particular, en un entorno del punto. Así, podemos aproximar lafunción por el polinomio de Taylor de segundo orden:
f (0, π) +
(∂ f∂x
(0, π)x +∂ f∂y
(0, π)(y − π))
+12
(∂2 f∂x2 (0, π)x2 + 2
∂2 f∂y∂x
(0, π)x(y − π) +∂2 f∂y2 (0, π)(y − π)2
)
Al sustituir se tiene:
f (x, y) ≈ 2π2x2 + 2π2x(y − π) ♣
Ejercicio 14.35 Hallar el desarrollo de Taylor de las siguientes funciones en un entorno del punto que se
indica y utilizarlo para obtener una aproximación del valor también indicado
(a) f (x, y) = xx + yx P(1, 1) f (1.2, 1.1) (b) f (x, y) = xx(y−1) P(1, 2) 1.011.212
(c) f (x, y) = ln(x2 + y) P(1, 0) ln(1.44)
Página 477 PROYECTO MATECO 3.14

Bloque IV. CÁLCULO DIFERENCIAL E INTEGRAL AMPLIADO
Ejercicio 14.36 Obtener el polinomio de Taylor de grado dos de las siguientes funciones en un entorno del
punto que se indica utilizando derivación logarítmica y utilizarlo para obtener una aproximación del valor
también indicado(a) f (x, y) = yxy (2, 1) f (2.1, 1.02) (b) f (x, y) = x2x+y (1, 0) 1.012.08
(c) f (x, y) = x2xy (1, 1) 1.012.42 (d) f (x, y) = (1 + xy)y (0, 1) 1.011.1.
PROYECTO MATECO 3.14 Página 478













![Euler-Maclaurinの和公式の一般化 - GitHub Pages · 2020-07-14 · 1 Euler-Maclaurinの和公式の一般化 黒木玄 2017年7月24日作成 概要 論文[2] では, 実数直線上の確率分布に対して,](https://static.fdocuments.es/doc/165x107/5f673679d5ce95545f3ad5c9/euler-maclaurinoeeoe-github-pages-2020-07-14-1-euler-maclaurinoeeoe.jpg)



