Tema 14 Cinematica Del Cuerpo Rigido

of 42
-
Upload
eddie-guerra-ruiz -
Category
Documents
-
view
92 -
download
1
Transcript of Tema 14 Cinematica Del Cuerpo Rigido
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
1/42
1 I.T.I. :MECANICA I
Departamento: INGENIERA MECNICA, ENERGTICA Y DE MATERIALES
TEMA N 14:DINMIC
CINEMTICA DEL CUERPO RGIDO
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
2/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 2 -
Indice Punto 14.1 Introduccin Punto 14.2 Traslacin Punto 14.3 Movimiento plano Punto 14.4 Rotacin en torno a un eje fijo
Punto 14.4.1 Movimiento de una recta en la rotacin en torno a un eje fijo
Punto 14.4.2 Movimiento de un punto en la rotacin en torno a un eje fijo
Punto 14.5 Movimiento plano cualquiera Punto 15.5.1 Anlisis del movimiento absoluto
Punto 14.5.2 Velocidad relativa
Punto 14.5.3 CIR
Punto 14.5.4 Aceleracin relativa
Punto 14.6 Movimiento relativo a ejes en rotacin Punto 14.6.1 Posicin
Punto 14.6.2 Velocidad
Punto 14.6.3 Aceleracin
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
3/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 3 -
14.1 Introduccin
En el captulo anterior veamos que para describir perfectamente el movimiento de unpunto bastaba con conocer en todo instante su situacin. Sin embargo, en el caso delmovimiento de un slido rgido la descripcin completa de su movimiento exige que seden la situacin y la orientacin del cuerpo, interviniendo tanto magnitudes linealescomo angulares.
En un cuerpo rgido, la separacin entre dos puntoscualesquiera es fija e independiente del tiempo,con lo que tambin lo sern los ngulosdeterminados por toda tripleta de puntos (figura).Los cuerpos reales nunca son rgidos, no obstante,en la mayora de las aplicaciones tcnicas, lasdeformaciones debidas a las fuerzas aplicadassuelen ser relativamente pequeas.
Una vez terminado el anlisis cintico, debern calcularse las deformaciones. Si songrandes, es posible que haya que repetir los anlisis cinemtico y cintico teniendo encuenta la deformacin.
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
4/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 4 -
Consideraremos 5 tiposgenerales de movimientode un cuerpo rgido:
1.- Traslacin.En la traslacin de un cuerpo rgido, la orientacin de todo segmentorectilneo del cuerpo se mantiene constante. NO HAY ROTACIN.Un movimiento en el cual una recta se mantenga siempre paralela a la velocidad, sedice que es de traslacin rectilnea en el que todo punto del cuerpo sigue unatrayectoria rectilnea en el sentido del movimiento.En una traslacin curvilnea, la orientacin de todo segmento rectilneo sigue siendo
invariable pero los distintos puntos no siguen trayectorias rectilneas.En la traslacin coplanaria, la trayectoria de cada punto se mantiene siempre en unplano.
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
5/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 5 -
En la rotacin en torno a un eje fijo, una recta del cuerpo, el eje de rotacin, est fija.Los puntos que no son del eje recorren trayectorias circulares centradas en el eje.Si el eje de rotacin no corta al cuerpo, podemos imaginar que este se extiende hastaincluir el eje de rotacin, es decir, a fines cinemticos el movimiento del cuerpo es elmismo que tendra si formara parte de un cuerpo rgido mayor que incluyera al eje derotacin.
Como cada trayectoria circular est contenida en un plano, la rotacin de un cuerpoen torno a un eje fijo es un movimiento plano.
2.- Rotacin en torno a un eje fijo.
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
6/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 6 -
La traslacin coplanaria y la rotacin en torno a un eje fijo constituyen tipos concretosde movimiento plano en los cuales las rectas del cuerpo cumplen condicionesparticulares. Todo otro tipo de movimiento plano entra en la categora de movimientoplano cualquiera.
3.- Movimiento plano cualquiera.
Cada punto del cuerpo permanece en un plano.
4.- Rotacin en torno a un punto fijo.Uno de lospuntos del cuerpo est fijo y cada punto se muevesiguiendo una trayectoria situada en la superficie
de una esfera centrada en el punto fijo.
5.- Movimiento cualquiera.El resto de movimientos entra dentro de esta categora.
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
7/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 7 -
14.2 Traslacin
Si A y B son dos puntos cualesquiera del cuerpo, susposiciones estarn relacionadas por la regla del tringulopara la suma de vectores:
ABAB rrr /Como la posicin de B relativa a A (rB/A) es constante tanto en mdulo como endireccin, su derivada ser nula, as al derivar respecto al tiempo la ecuacin anterior setiene simplemente:
AB vv Expresin que nos dice que en un cuerpo rgido en traslacin todos sus puntos tienenigual velocidad. Podemos derivar respecto al tiempo la ecuacin anterior y obtenemos:
AB aa
La orientacin de todosegmento rectilneo deun cuerpo rgido se
mantiene constante.
Expresin que nos dice que en un cuerpo rgido en traslacin todos sus puntos tienenigual aceleracin.Como la forma, tamao y orientacin del cuerpo no importan para describir elmovimiento, la Cinemtica de los puntos que constituyen un cuerpo rgido enmovimiento de traslacin coincide con la Cinemtica del punto (captulo 13).
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
8/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 8 -
14.3 Movimiento plano.Caractersticas generales
Cada punto del cuerpo permanece en un plano.
Como todos los puntos de rectas perpendiculares a un planotienen igual movimiento, bastar considerar el movimiento en unsolo plano. En adelante, se utilizar el plano que contiene el centrode masa al que llamaremos plano del movimiento.
As, la posicin de un cuerpo rgido en movimiento planoquedar determinada al dar la situacin de un punto y laorientacin de una recta del plano del movimiento.
La orientacin de la recta se puede determinar o bien dando elngulo que forma con una direccin fija o dando la situacin dedos puntos cualesquiera de la recta.
El movimiento de todo el cuerpo podr determinarse a partir delmovimiento de dicho punto y el movimiento de la recta.
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
9/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 9 -
Considerando el cuerpo de la figura en el que se han dibujadodos segmentos rectilneos separados un ngulo fijo . Ambosestn en el plano de movimiento y los ngulos que forman conuna direccin fija de referencia son AB y CD. Estos ngulosestn relacionados de la forma:
Es importante observar que el movimientoangular de rectas del plano del movimiento esel mismo para toda recta de un cuerpo rgido:
ABCDAl moverse el cuerpo, variarn los ngulos ABy CDpero no el ngulo fijo con lo que
al derivar la ecuacin anterior respecto al tiempo, tendremos ABABCDCD
Donde es la velocidad angular, variacin por unidad de tiempo de la posicin angular.Esta ecuacin nos dice que todas las rectas del cuerpo tienen igual velocidad angular. Derivando respecto al tiempo la ecuacin anterior, tenemos
ABABABCDCDCD
Donde es la aceleracin angular, variacin por unidad de tiempo de la velocidadangular. Esto nos dice que todas las rectas del cuerpo tienen igual aceleracinangular .
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
10/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 10 -
14.4 Rotacin en torno a un eje fijo
Se ha indicado que la posicin de un cuerpo rgido en movimiento plano quedadeterminada al dar la situacin de un punto y la orientacin de una recta del plano delmovimiento.
As, el movimiento plano de todo cuerpo se puede determinar a partir del movimientode dicho punto y el movimiento de la recta.
En nuestro caso, en la rotacin alrededor de un eje fijo, el punto del eje permanecesiempre en l. Por tanto, el movimiento de todo cuerpo se podr determinar a partir delmovimiento de una recta.
A continuacin se va a analizar,en la rotacin en torno a un eje fijo:
El movimiento de una recta.El movimiento de un punto.
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
11/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 11 -
14.4.1 Movimiento de una recta en larotacin en torno a un eje fijo
En la rotacin en torno a un eje fijo, la posicin del cuerpo queda determinada al dar laposicin angular de una recta cualquiera del plano de movimiento.
La derivada respecto al tiempo de la posicin angular da la velocidad angular (t) y lasegunda derivada da la aceleracin angular (t) del cuerpo rgido:
)(;)(2
2
tdt
d
dt
dt
dt
d
Si conocemos la aceleracin angular en funcin del tiempo podremos integrar paraobtener la velocidad angular y la posicin angular en funcin del tiempo as:
tt
dtttdttt0
0
0
0 )()(;)()( 2
0002
1)(;)( ttttt
Cuando se conozca la aceleracin angular en funcin de la posicin angular y no deltiempo, la regla de la cadena para la derivacin da
d
d
dt
d
d
d
dt
d)(
=cte
que se puede integrar para obtener la velocidad angularen funcin de la posicin angular
2
1
)(2/2/ 2
1
2
2
d
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
12/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 12 -
14.4.2 Movimiento de un punto en larotacin en torno a un eje fijo
En la rotacin en torno a un eje fijo, los puntos que no estn en el eje recorrentrayectorias circulares centradas en dicho eje.
La velocidaddel punto P puede escribirse en funcin de unvector velocidad angular definido por: = k , de
- direccin: la del eje en torno al cual gira el cuerpo- sentido: regla de la mano derecha
y en funcin de rP(vector de posicin del punto P medidorelativo al eje de rotacin), de la siguiente manera
tPPP errv xExpresando el producto vectorial en funcin de lascoordenadas x-y, tenemos:
ji)ji)k cosrsenrsenrcosrv PPPPP (x(
D d I i M i E i d M i l
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
13/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 13 -
La aceleracin del punto P que recorre sutrayectoria circular alrededor del eje de rotacin,tendr componentes normal y tangencial
jiji senrcosrcosrsenra PPPPP22
Por analoga con la velocidad de P, la componente tangencialde la aceleracin se podr escribir en la forma:
PtP ra x)( donde es el vector aceleracin angular definido por = k de
- direccin: la del eje en torno al cual gira el cuerpo- sentido: regla de la mano derecha
Las componentes x-y de la aceleracin se obtienen derivando la la velocidad as: nPtPnPtPP ereraaa 2
La componente normal de la aceleracin se podr escribir en la forma:
nPtPPnP ererva 2)(x)k(x)( as: )x(xxxx PPPPP rrvra
D t t d I i M i E ti d M t i l
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
14/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 14 -
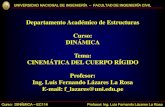
PROBLEMA 14.1El plato de un tocadiscos alcanza su velocidad defuncionamiento de 33,33 rpm al cabo de 5 revoluciones apartir del momento de ponerlo en marcha.
Determinar la aceleracin angular inicial 0del
plato si:a) la aceleracin angular es constante = 0 =constante
b) la aceleracin angular disminuye linealmente
con la velocidad angular desde 0cuando = 0hasta 0/4 cuando = 33,33 rpm.
Departamento de Ingeniera Mecnica Energtica y de Materiales
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
15/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 15 -
PROBLEMA 14.2
Una rueda dentada de 80 mm dedimetro gira en torno a un eje quepasa por su centro O. En ciertoinstante, la velocidad angular de larueda es de 2 rad/s en sentido
antihorario, aumentando a razn de 1rad/s2. Determinar la aceleracin (enmdulo, direccin y sentido) del dienteA en dicho instante.
Departamento de Ingeniera Mecnica Energtica y de Materiales
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
16/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 16 -
14.5 Movimiento plano cualquiera
En este apartado se va a tratar todo movimiento plano en el cual las rectas del cuerpogiren sin que haya ningn punto del cuerpo fijo.Veremos que los movimiento planos cualesquiera son una SUPERPOSICIN de unatraslaciny una rotacinen torno a un eje fijo.Existen dos mtodos generales para la solucin de los problemas de movimiento planocualquiera:
Mtodo 1 (del movimiento absoluto): Se escriben las relaciones geomtricas quedescriben las ligaduras a las que est sometido el cuerpo y su interaccin conotros cuerpos. Despus se utilizan estas relaciones para describir la situacin ymovimiento de otros puntos del cuerpo.
Mtodo 2 (del movimiento relativo): Aprovecha el concepto del movimientorelativo de puntos. Como la distancia entre dos puntos de un cuerpo rgido es
invariable, las expresiones de la velocidad y aceleracin relativas adoptan formassencillas que slo dependen de la velocidad angular y de la aceleracin angulardel cuerpo.
Departamento de Ingeniera Mecnica Energtica y de Materiales
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
17/42
I.T.I 1:MECANICA I
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 17 -
14.5.1 Anlisis del movimiento absoluto
Las ecuaciones relativas al movimiento angular del cuerpo rgido y al movimiento dealguno de sus puntos se pueden obtener efectuando un anlisis minucioso de la relacinentre puntos y rectas del cuerpo rgido.
Primero se obtiene la situacin de un cierto punto del cuerpo en funcin de laorientacin angular de ste.
A continuacin, las derivadas respecto al tiempo de esta relacin dan la velocidad y laaceleracin del punto en funcin de la orientacin angular, la velocidad angular y laaceleracin angular del cuerpo.
Como este mtodo se apoya totalmente en la descripcin geomtrica del cuerpo ocuerpos del problema, no se pueden deducir unas frmulas generales. Habr que
deducir frmulas especficas para cada problema concreto.
Departamento de Ingeniera Mecnica, Energtica y de Materiales
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
18/42
I.T.I 1:MECANICA I
epa ta e to de ge e a ec ca, e gt ca y de ate a esIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 18 -
PROBLEMA 14.3Deducir una expresin que relacione la posicinde un punto del borde de una rueda cuandoruede sin deslizamiento sobre una superficiehorizontal en reposo. Utilizar dicha expresinpara:a) Dar la velocidad del punto en funcin de y .b) Demostrar que la velocidad del punto decontacto entre la rueda y la superficie esinstantneamente nula.c) ...d) ...
Departamento de Ingeniera Mecnica, Energtica y de Materiales
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
19/42
I.T.I 1:MECANICA I
p g , g yIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 19 -
14.5.2 Velocidad relativa
Si A y B son dos puntos cualesquiera de un cuerpo rgido,sus posiciones estarn relacionadas as:
ABAB /rrr y derivndola respecto al tiempo:
ABAB /vvv
Ecuaciones aplicables a dos puntos cualesquiera, tanto si forman parte del cuerpo rgidocomo si no. Si los puntos A y B pertenecen a un cuerpo rgido, su separacin serconstante y el punto B resulta recorrer una trayectoria circular alrededor del punto A.Por tanto, la velocidad relativa vB/Avendr dada por
ABtABAB r /// rxkev
entonces ABAtABAABAB r
/// rxkvevvvv
Por tanto, la velocidad del punto cualquiera B de un cuerpo rgido es la suma de latraslacin de todo el cuerpo con A ms una rotacin de todo el cuerpo alrededor de A.
Departamento de Ingeniera Mecnica, Energtica y de Materiales
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
20/42
I.T.I 1:MECANICA I
Ingeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 20 -
Por lo tanto, la ecuacin de la velocidad relativa se puede utilizar en los siguientes casos:a) Para hallar las dos componentes de la velocidad de un cierto punto B cuando se
conozcan la velocidad angular del cuerpo y la velocidad de otro punto del cuerpo.b) Cuando se conozcan las direcciones de las velocidades de dos puntos A y B (ejemplo:
si se deslizan a lo largo de guas fijas) y se da una de las tres magnitudes que faltan(mdulo de la velocidad en A, idem en B o la velocidad angular)
Cuando dos o ms cuerpos rgidos estn unidos por unpasador, podrn escribirse por separado las ecuaciones dela velocidad relativa correspondientes a cada uno de loscuerpos. Uno de los puntos utilizados en cada ecuacindeber ser el punto comn que une los dos cuerpos y cuyavelocidad ser la misma para cada cuerpo.
CBBCCABABA
CBCABAB
//
//
rxkvrxkvvvvvv
La ecuacin anterior es una ecuacin vectorial,que en el caso de movimiento plano, tiene doscomponentes escalares independientes (una paraiy otra paraj).
Departamento de Ingeniera Mecnica, Energtica y de MaterialesI i i M k ik E ik M i l S il
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
21/42
I.T.I 1:MECANICA I
Ingeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 21 -
PROBLEMA 14.4
Una escalera AB tiene una longitudde 3 m y se desliza por la pared y elsuelo. Cuando el ngulo vale 30,el extremo inferior de la escalera seest moviendo hacia la derecha con
una velocidad constante de 2 m/s.Determinar la velocidad delextremo superior de la escalera y lavelocidad angular de sta en eseinstante.
Departamento de Ingeniera Mecnica, Energtica y de MaterialesI i it M k ik E tik t M t i l S il
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
22/42
I.T.I 1:MECANICA I
Ingeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 22 -
PROBLEMA 14.5La rueda del mecanismo corredera-cigeal de la figura gira en sentidoantihorario con velocidad constante de 10 rad/s.
Determinar la velocidad de la corredera B y la velocidad angular de la biela ABdel cigeal cuando vale 60.
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
23/42
I.T.I 1:MECANICA I
Ingeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 23 -
PROBLEMA 14.5bis
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
24/42
I.T.I 1:MECANICA I
Ingeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 24 -
14.5.3 Centro instantneo de rotacin (CIR)
En un movimiento plano cualquiera de un cuerpo rgido, no hay ningn punto que sehalle siempre en reposo. No obstante, en cada instante, es siempre posible hallar unpunto del cuerpo (o de su extensin), llamado CIR, que tenga velocidad nula.El CIR de un cuerpo rgido en movimiento plano cualquiera no es un punto fijo. Laaceleracin del CIR no suele ser nula. Por tanto, diferentes puntos del cuerpo rgidosern CIR en diferentes instantes y la situacin del CIR se mover respecto al tiempo.
Para situar el CIR trazaremos perpendiculares a lasvelocidades conocidas (de al menos dos puntos) y elpunto de corte indicar el CIR (punto C). Eso es debido aque la velocidad de C es nula y que las velocidades de A yde B se calculan como:
CBB
CAA
/
/
rxkvrxkv
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
25/42
I.T.I 1:MECANICA I
Ingeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
- 25 -
Si las velocidades de los puntos A y de B fuesenparalelas, el CIR debera hallarse en la recta queune dichos puntos. Como el mdulo de lavelocidad relativa es r, la situacin del CIR se
halla por semejanza de tringulos.
Una vez localizado el CIR, la velocidad de cualquier otro punto del cuerpo se podrhallar utilizando la ecuacin de la velocidad relativa
CDCDCD // rxkvvv
Si las velocidades de lospuntos fuesen iguales enun instante cualquiera, elcuerpo se hallarainstantneamente en
traslacin y = 0. (CIRen el infinito).
Cuando dos o ms cuerpos estn unidos por un pasador, podremos hallar un CIR paracada cuerpo. En general, estos CIR no coincidirn en posicin. Como la velocidadabsoluta del punto que une dos cuerpos es la misma para cada uno de ellos, los CIR deuno y otro debern estar sobre la recta que pase por el punto comn de ambos cuerpos.
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
26/42
I.T.I 1:MECANICA I
ge a t a e a oa, e get oa eta ate a ee Sa a
- 26 -
PROBLEMA 14.6En el instante representado en la figura, la corredera A se est moviendo hacia laderecha con una velocidad de 3 m/s. Hallar la situacin del CIR y utilizarlo parahallar la velocidad angular del brazo AB y la velocidad de la corredera B.
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
27/42
I.T.I 1:MECANICA I
g , g
- 27 -
14.5.4 Aceleracinrelativa
Derivando dos veces respecto al tiempo la ecuacinde la posicin relativa obtenemos:
Ecuacin aplicable a dos puntos cualesquiera, tantosi forman parte del cuerpo rgido como si no.
ABAB aaa /
Pero si los puntos A y B pertenecen a un cuerpo rgido, su separacin ser constante y
el punto B resulta recorrer una trayectoria circular alrededor del punto A. Por tanto, laaceleracin relativa aB/Avendr dada por
nABtABABABnABtABAB rraaa eerxkxkrxk 2
///////
nABtABAABABAABAB rraaaaa eerxkxkrxk 2///// y
Como la componente normal de la aceleracin relativa contiene a , habr que resolverantes el problema de la velocidad relativa para poder resolver el de aceleracin relativa.
Luego:
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
28/42
I.T.I 1:MECANICA I
- 28 -
PROBLEMA 14.7Para las condiciones e instante especificados en el ejemplo 14-4. Hallar laaceleracin angular de la escalera y la aceleracin de su extremo superior.
= 30= 0,770 rad/s (antihorario)vA= 1,155 m/s aB= 0
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
29/42
I.T.I 1:MECANICA I
- 29 -
PROBLEMA 14.8
Para las condiciones e instanteespecificados en el ejemplo 14-5.Hallar la aceleracin angular de labiela AB y la aceleracin de lacorredera B. = 60
= 15,06
AB= 1,553 rad/s (horario)vB= 22,50 m/s
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
30/42
I.T.I 1:MECANICA I
- 30 -
14.6 Movimiento relativo a ejesen rotacin
Hasta ahora se ha descrito la posicin, la velocidad y la aceleracin de cada puntoutilizando un sistema de coordenadas fijo. Sin embargo, existen otros tipos deproblemas para los cuales conviene describir el movimiento de uno de los puntosrelativo a un sistema de coordenadas en rotacin, a saber:
1.- Cuando el movimiento se observa desde un sistema de coordenadas que estgirando. Ejemplo: Cuando se observa desde la Tierra en rotacin el movimiento de
cohetes o naves espaciales.2.-Cuando los movimientos de dos puntos estn relacionados de alguna manerapero no son iguales y no estn en un mismo cuerpo rgido. Ejemplo: Mecanismosconectados mediante pasadores que se deslizan por ranuras. El movimiento relativo seespecifica suficientemente dando la traslacin y la rotacin de la pieza que contiene laranura, la forma de dicha ranura y la rapidez con que el pasador la recorre.
3.- Problemas de cintica en los que interviene la rotacin de cuerpos rgidos de
forma irregular. Para algunos cuerpos, si utilizamos ejes de coordenadas que giran conel cuerpo, los momentos y productos de inercia sern constantes, cosa que no ocurrecon ejes fijos, a menos que el cuerpo presente simetras.
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
31/42
I.T.I 1:MECANICA I
- 31 -
14.6.1 Posicin
Consideremos que A y B sean dos puntoscualesquiera animados de movimiento plano.En funcin de un sistema de coordenadas fijo X-Y,las situaciones de A y B vienen dadas por:
jiji BBBAAA YXrYXr y
Supongamos que el punto A pertenece a un cuerpo rgido que gira con velocidad
angular y con aceleracin angular , de valores:
Supongamos adems que el movimiento del punto A pueda describirse fcilmente enel sistema de coordenadas fijo.
Por otra parte, supongamos que el punto B se mueva de una manera prefijada relativaal cuerpo rgido giratorio (Ejemplo- pasador que corre por una ranura).
Aun cuando pudiera ser fcil describir el movimiento del punto B relativo al cuerpogiratorio, pudiera no ser fcil la descripcin de su movimiento relativo al sistema decoordenadas fijo X-Y.
kyk
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
32/42
I.T.I 1:MECANICA I
- 32 -
Sea x-y un sistema de coordenadas, con origen enel punto A, solidario al cuerpo rgido y que gire conl. As, el vector de posicin relativa es
yxAB eyexr /Dondeexy eyson los vectores unitarios asociados alos ejes giratorios, por lo que varan con el tiempo.
Por tanto, la posicin de B vendr determinada por:
yxAABAB eyexrrrr /x
y
rA = XAi + YAj
ex= cosi + senjey= - seni + cosj
En donde: son funciones del tiempo conocidas.
Vamos a describir el movimiento del punto Brelativo al cuerpo giratorio:
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
33/42
I.T.I 1:MECANICA I
- 33 -
14.6.2 VelocidadDerivando respecto al tiempo la expresin de laposicin del punto B:
dt
edy
dt
edxvv
dt
edye
dt
dy
dt
edxe
dt
dxv
dt
eyexdv
dt
rdvv
yxBre lA
y
yx
xA
yx
AAB
AB
/
vBrel es la velocidad de B relativa al sistema de coordenadas giratorio x-y y los dosltimos trminos aparecen por que las direcciones de los vectores unitarios e
x y e
yvaran con el tiempo por la rotacin de los ejes x-y.
d
ed
dt
d
d
ed
dt
ed
d
ed
dt
d
d
ed
dt
ed yyyxxx y
Como:
x
y
yx e
d
ede
d
ed
y
Tenemos:
yx
y
xyx ee
dt
edee
dt
edxyx
yxAABAB eyexrrrr /
Brelv
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
34/42
I.T.I 1:MECANICA I
- 34 -
Aplicando estos resultados en la ecuacin de lavelocidad relativa tenemos:
BrelABAyxBrelAB vrveyexvvv /xxx
Donde vA, vBy se miden relativos al sistema de coordenadas fijo X-Y.rB/Ay vBrelse miden relativos al sistema de coordenadas giratorio x-y
Todos los vectores de la ecuacin anterior se deben expresar en un sistema decoordenadas comn antes de efectuar las sumas y el producto vectorial.
O bien rB/Ay vBrelse expresan en el sistema de coordenadas fijo X-Y mediante:
ex= cosi + senj ey= - seni + cosj
O bien vAy vBdebern expresarse en el sistema de coordenadas giratorio x-y usando:
i = cosex- seney j = senex+ cosey
La eleccin se basar en la forma en que se conozcan los datos y en la forma en quequieran tenerse los resultados.
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
35/42
I.T.I 1:MECANICA I
- 35 -
BrelABAB
vrvv /
x
Si A y B son dos puntos fijos de un mismo cuerpo rgido, entonces la vBrel= 0, ser
su velocidad angular y la ecuacin anterior se reduce a la deducida en el apartado14.5.2 que analizaba la velocidad relativa en movimiento plano cualquiera.
Si A es un punto fijo de un cuerpo rgido en rotacin y B es un pasador que corre enuna ranura del cuerpo ser la velocidad que tendra el punto B siestuviera fijo en el cuerpo en vez de estar movindose respecto a l. El ltimo trmino
vBrel(tangente a la ranura) es la velocidad adicional que tiene el punto B a causa de sumovimiento a lo largo de la ranura.
ABA rv /x
Interpretacin de la expresin obtenida:
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
36/42
I.T.I 1:MECANICA I
- 36 -
PROBLEMA 14.10Al oscilar el brazo BC, de400 mm de longitud, delmecanismo representado enla figura, el collar C sedesliza en uno y otro sentidopor el brazo AD. Sabiendo
que = 1,5 sen t raddondet se expresa en segundos,determinar la velocidad derotacin del brazo AD y lavelocidad de la corredera alo largo del brazo AD
cuando t = 1/3 s.
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
37/42
I.T.I 1:MECANICA I
- 37 -
14.6.3 AceleracinDerivando respecto al tiempo la ecuacin de lavelocidad obtenida anteriormente:
dt
vd
dt
rdr
dt
daa BrelABABAB
// xx
Del clculo de la velocidad relativa: ABBrel
ABrv
dt
rd
/
/x
BrelBrelyxBrel
yxyx
yxBrel
vaeyexa
dt
edy
dt
edxeyex
dt
eyexd
dt
vd
xxx
Un clculo semejante de la derivada de la velocidad de B relativa nos da:
es la aceleracin de B relativa al sistema de coordenadas giratorio x-y (medida en l).
Aplicando las ecuaciones anteriores en la ecuacin * y reagrupando trminos se llega a
BrelABAB vrvv /x
*
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
38/42
I.T.I 1:MECANICA I
- 38 -
BrelBrelABABAB varraa x2xxx //
Donde aA, aB, yse miden relativos al sistema de coordenadas fijo X-Y.rB/A, vBrely aBrelse miden relativos al sistema de coordenadas giratorio x-y
Todos los vectores de la ecuacin anterior se deben expresar en un sistema decoordenadas comn antes de efectuar las sumas y productos vectoriales.
O bien rB/A, vBrely aBrelse expresan en el sistema de coordenadas fijo X-Y mediante:
ex= cosi + senj ey= - seni + cosj
O bien aA, aB, y debern expresarse en el sistema de coordenadas giratorio x-yusando: i = cosex- seney j = senex+ cosey
La eleccin se basar en la forma en que se conozcan los datos y en la forma en quequieran tenerse los resultados.
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
39/42
I.T.I 1:MECANICA I
- 39 -
Interpretacin de la expresin obtenida:
BrelBrelABABAB varraa x2xxx //
Si A y B son dos puntos fijos de un mismo cuerpo rgido, entonces la vBrel= aBrel= 0, y son la velocidad angular y la aceleracin angular y la ecuacin anterior se reduce ala deducida en el apartado 14.5.4 que analizaba la aceleracin relativa en movimientoplano cualquiera.
Si A es un punto fijo de un cuerpo rgido en rotacin y B es un pasador que se deslizapor una ranura del cuerpo, la aceleracin que tendra el punto B si estuviera fijo en elcuerpo en vez de estar movindose respecto a l ser:
El trmino aBrel es la aceleracin adicional que tiene el punto B a causa de sumovimiento a lo largo de la ranura.
El trmino restante 2 x vBreles la aceleracin de Coriolis, perpendicular tanto a como a vBrel y por tanto estar en el plano de movimiento y ser perpendicular a laranura a lo largo de la cual se mueve el pasador.
ABABA
rra//
xxx
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
40/42
I.T.I 1:MECANICA I
- 40 -
PROBLEMA 14.11
En el mecanismo de la figura, el brazoAB gira en sentido horario con unafrecuencia constante de 6 rpmmientras el pasador P se mueve haciafuera a lo largo de una gua radial
practicada en el disco giratorio conuna velocidad constante de 25 mm/s.En el instante representado, r = 7,5cm, = 12 rpm, = 0,1 rad/s2, ambasen sentido horario. Determinar lavelocidad y la aceleracin absolutasdel pasador P en ese instante.
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 14 11
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
41/42
I.T.I 1:MECANICA I
- 41 -
PROBLEMA 14.11bis
Departamento de Ingeniera Mecnica, Energtica y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA
-
5/23/2018 Tema 14 Cinematica Del Cuerpo Rigido
42/42
I.T.I 1:MECANICA I
- 42 -
PROBLEMAEXAMEN
La barra AB de la figura tiene unavelocidad angular antihoraria de 2 rad/sy una aceleracin angular antihoraria de10 rad/s2.a) Determinar la velocidad angular de labarra AC y la velocidad del pasador Arespecto a la ranura de la barra AB.(AC= 10 rad/s; vA rel= -3,58 m/s)b) Determinar la aceleracin angularangular de la barra AC y la aceleracindel pasador A respecto a la ranura de labarra AB. (AC = 170 rad/s2; aA rel = -
75,13 m/s2)