tema 27 - la administración electrónica de tráfico. conceptos básicos
Upload
karla-virginia-pachecoCategory
view
484download
0
CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
1
CAPÍTULO I
1.- DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL.
Generalidades
Un curso de estructuras trata sobre el cálculo de la resistencia mecánica, estabilidad y rigidez de los sistemas formados por un conjunto de elementos estructurales y donde se definen los métodos para calcularlos.
Basado en esta modalidad, este capítulo establece las consideraciones teóricas que tienen que ver con la definición de una estructura, unión de sus elementos, formas de apoyo, tipos de estímu-los y las simplificaciones para el cálculo que conllevan al planteamiento de las limitaciones estable-cidas en este texto, como lo son: el análisis de las estructuras reticulares estáticamente determina-das, sujetas a estímulos de naturaleza estática, bajo un comportamiento lineal.
1.1. Estructura
Una estructura es un sistema compuesto por elementos unidos entre sí y sustentada, de mo-do que pueda soportar en equilibrio estático las fuerzas exteriores aplicadas, y las fuerzas de la gravedad que la solicitan. El ensamblaje total o estructura, es utilizado ampliamente en edificios, puentes, torres de transmisión, aviación y muchos otros medios.
Deben, pues, disponerse y diseñarse los elementos de una estructura de modo que puedan soportar las cargas en equilibrio estático y transferir sus efectos a la cimentación:
Figura No.1.1. Estructura de edificios
1.2. Idealización de las estructuras
Para Laible J. uno de los pasos más importantes en cualquier análisis de estructuras es el proceso de formulación de un modelo de la estructura real, susceptible de un tratamiento matemáti-co relativamente sencillo. Este paso consiste en adoptar una cantidad de idealizaciones y simplifi-

CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
2
caciones con la intención de reducir la complejidad del problema, así como de mantener las carac-terísticas más importantes del comportamiento estructural. Algunas de las idealizaciones tratan directamente de las descripciones geométricas de la estructura real; otras se refieren al comporta-miento de los materiales y otras tienen que ver con la forma en que se conectan sus miembros y como está soportada la estructura.
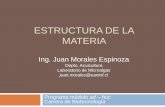
En el proceso de idealización de las estructuras, éstas son representadas por un diagrama de líneas. Estas líneas por lo general siguen el centroide de la sección transversal de cada uno de sus elementos, tal como se aprecia en la figura No. 1.2, para una estructura de pórtico plano, formada por miembros de sección transversal constante, en forma de con propiedades de momento de inercia y área especificada.
En cada eje centroidal, se acostumbra a señalar las propiedades de los miembros: el área y el momento de inercia; éstas son necesarias para el análisis de la estructura, y se definen los no-dos de la estructura como los puntos en que dos o más ejes centroidales se intersectan, los puntos de apoyo y los extremos libres, como los puntos A, B, C, D y E de la figura No. 1.2:
Figura No.1. 2. Estructura de pórtico plano con miembros de sección constante.
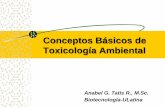
Figura No.1.3. Condiciones de uniones típicas en estructuras de acero.

CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
3
Una vez que se ha definido el diagrama de líneas, es necesario idealizar las conexiones de los miembros y los soportes. En la figura No.1.3. se muestran algunas condiciones para la unión de los miembros y sus representaciones simplificadas. A veces se consideran las uniones utilizando remaches, pernos y soldaduras, para que sean prácticamente rígidas, de tal modo, que los extre-mos de todos los elementos unidos deben no solo trasladarse, sino también rotar prácticamente una cantidad idéntica. (Véase en la figura No.1.3(a)). Otras veces se consideran uniones más lige-ras para que sean semirígidas. Realmente los elementos están raramente articulados en las unio-nes, pero en ciertos casos las uniones remachadas o roblonadas son tan flexibles que solo transmi-ten momentos despreciables. (Véase en la figura No. 1.3 (b)).
En cuanto a los soportes, el elemento extremo de una estructura puede tener rotación libre, estar parcialmente fijo o estar empotrado, dependiendo del tipo de construcción del soporte real. En la figura No.1.4, se muestran algunas condiciones para los soportes, y sus representaciones simbó-licas:
Figura No. 1.4. Condiciones de soportes típicos
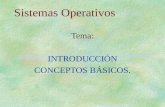
Las estructuras se hacen por lo común del acero, concreto o madera. Cada uno de los mate-riales tiene propiedades diferentes, que deben ser consideradas para el análisis y el diseño. En la figura No.1.5, aparecen curvas típicas, esfuerzo-deformación para los tres materiales mencionados:

CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
4
Figura 1.5. Leyes de esfuerzo-deformación
El módulo de elasticidad E se define como la pendiente de la curva esfuerzo-deformación. Para deformaciones localizadas debajo de las líneas punteadas que se muestran en cada gráfica, la curva es aproximadamente una línea recta. La pendiente es constante y por ello también E lo es. Dentro de esta región, al comportamiento del material, se le denomina lineal y fuera de ella, cómo no lineal. Por otra parte, si al descargar el material, el desplazamiento sigue exactamente la misma trayectoria carga-desplazamiento que tuvo durante el proceso de carga; se dice que el material tiene un comportamiento elástico; de otro modo, se llama inelástico. Las trayectorias de carga de la figura No. 1.6 ilustran la naturaleza de varias combinaciones de las propiedades del material. Por ejemplo, el acero cargado por debajo de su punto de fluencia es lineal y elástico, cargado mas allá de su punto de fluencia es no lineal e inelástico:
Elásticamente lineal Inelásticamente no lineal
Figura No 1.6. Trayectoria de cargas en el acero
Con la finalidad de simplificar el proceso de análisis, generalmente se idealizan las propieda-des de los materiales adoptando modelos de comportamiento como los mostrados en la figura No. 1.7:

CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
5
Figura No. 1.7. Modelos de comportamiento del material
La escogencia del modelo de comportamiento depende, entre otros factores, de la magnitud de las solicitaciones que actúan sobre la estructura, de la información que interesa extraer de su respuesta y de la forma de la curva esfuerzo-deformación. A lo largo de este texto se utilizará la suposición de comportamiento linealmente elástico del material.
1.3. Estructuras reticulares
Las estructuras reticulares, son aquellas formadas por miembros que son largos en compa-ración con las dimensiones de su sección transversal. También en una estructura reticulada los nodos son los puntos de intersección de los miembros, los puntos de apoyo y los extremos libres de los miembros extremos. Ejemplos de nodos son los puntos A, B, C y D de las figuras No. 1.8(a) y 1.8 (b). Los apoyos pueden estar empotrados, como el soporte A en la viga de la figura No. 1.8(a), articulados, como se muestra en el soporte A en el pórtico plano de la figura No.1.8(b), o pueden ser apoyos deslizantes, como los ilustrados por los apoyos B y C de la figura No. 1.8(a). Las cargas en una estructura reticular pueden ser fuerzas concentradas, cargas distribuidas o pares:
Figura No. 1.8. Estructuras de viga y pórtico plano
1.3.1. Tipos de estructuras reticulares
Las estructuras reticulares pueden considerarse divididas en tres categorías: estructuras pla-nas, estructuras en parrilla y estructuras espaciales. Cada una de las cuales representa una clase de estructura con características especiales, siendo su análisis lo suficientemente diferente en deta-lles, que se justifica un estudio separado de ellas.
Estos tipos de estructuras se ilustran en la figura No.1.9 y se describen a continuación:

CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
6
Figura No. 1.9. Tipos de estructuras reticulares
1.3.2. Estructuras planas
Una armadura plana (figura No.1.9(a)), se idealiza como un sistema de miembros en un pla-no interconectados en juntas articuladas, Todas las fuerzas aplicadas se consideran actuando en el plano de la estructura. Las cargas consisten en las fuerzas concentradas aplicadas en los nodos, pues, las cargas que actúan en los propios miembros para propósitos de análisis pueden reempla-zarse por cargas estáticamente equivalentes, que actúan en las articulaciones. Luego, el análisis de una armadura se realiza únicamente para cargas en los nodos.
Un pórtico plano (figura No.1.9. (b)), está compuesto de miembros rectos en un solo plano, que tienen su eje de simetría (un eje principal de la sección transversal) en el mismo plano (como es el caso de una viga). Los nodos pueden ser conexiones rígidas, articuladas o combinaciones de estas (tales como los nodos B, C y D). Las fuerzas que actúan sobre un pórtico plano y los despla-zamientos que experimenta, están en el mismo plano de la estructura; todos los pares que actúan en el pórtico tienen, sus vectores de momento normales al plano. Las fuerzas internas resultantes que actúan en cualquier sección de un miembro de pórtico plano pueden consistir, en general, de una fuerza axial, una fuerza cortante y un momento flector.
1.3.3. Estructuras en parrilla
Una parrilla es una estructura compuesta de miembros continuos, ubicados en un solo plano que se intersectan o se cruzan (Véase figura No.1.9(c)). Las conexiones entre sus miembros se consideran rígidas, las fuerzas aplicadas son todas normales al plano de la estructura y todos los pares tienen sus vectores en el plano de la parrilla. Esta orientación de las cargas con respecto a la estructura, puede dar como resultado efecto de torsión, así como flexión en los miembros.
1.3.4. Estructuras espaciales
Las estructuras espaciales son el tipo más general de las estructuras reticulares, tanto que no hay restricciones en las direcciones de los miembros o de las cargas y en la posición de los no-dos (Véase figura No.1.9 (d)).Todas las estructuras que se analizan en este texto son estructuras reticulares: vigas, armaduras planas, pórticos planos y parrillas.
1.4. Teoría de los desplazamientos pequeños y la no linealidad geométrica.

CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
7
Para Laible J, además de la no linealidad del material, algunas estructuras pueden compor-tarse de manera no lineal, debido al cambio en la forma de toda la estructura. Esto requiere que la estructura, se desplace una cantidad lo suficientemente significativa como para afectar las relacio-nes de equilibrio de la estructura. Cuando esto sucede, se dice que la estructura es "geométrica-mente no lineal". Para ilustrar lo indicado, considérese la viga en voladizo de la figura No.1.10. Si la viga es muy flexible y se desplaza la cantidad mostrada en la figura; en la posición original, el mo-mento alrededor de a es Ma = PL. En la posición desplazada, el momento estaría proporcionado por M = P (L + ).
Suponiendo que el desplazamiento es cualquier fracción de la carga, esto es;=f (P), al sustituir en la expresión de momento, en la forma desplazada, se obtiene Ma = P (L + f (P)), donde el último término es alguna función no lineal de P.
Cuando los desplazamientos son pequeños, para el ejemplo L el momento en a, M a = P (L + ) en la posición desplazada, está muy aproximado por Ma = P L de modo que es posible, expresar las fuerzas o los momentos en la estructura por medio de funciones lineales de las cargas. Esto significa que todos los cálculos que involucran las dimensiones de la estructura pueden basar-se en sus dimensiones originales:
Figura No. 1.10. No linealidad geométrica
Siempre que las deformaciones del material estén en el rango lineal y los desplazamientos sean pequeños, el sistema es lineal. Los métodos de análisis desarrollados en este texto se basan en dicha suposición y por lo mismo se dice que están basados en la teoría de los desplazamientos pequeños o en la teoría lineal de las estructuras.
1.5. Principio de superposición
El principio de superposición es uno de los conceptos más importantes en el análisis estruc-tural, válido para los sistemas lineales:
"La respuesta de una estructura, debida a un número de cargas aplicadas simultáneamente, se obtiene mediante la suma de las respuestas de las cargas individuales, aplicadas por separado y en cualquier orden de secuencia cada una de ellas a la estructura".

CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
8
La respuesta de una estructura es medida tanto por sus desplazamientos como por las fuer-zas internas que desarrolla.
Para ilustrar el uso del principio de superposición, considérese la viga de la figura No.1.11. Esta viga está sujeta a las cargas P1 y P2, que producen reacciones de apoyo, fuerzas internas y desplazamientos en toda la estructura. Las reacciones RA y RB se generan en los apoyos, y en el punto medio de su longitud un desplazamiento D. Los efectos de las cargas P1 y P2 actuando sepa-radamente se muestran en las figuras No. 1.11 (b) y No. 1.11(c). En cada caso existe un desplaza-miento en el centro y reacciones en los apoyos.
De acuerdo con el principio de superposición, las fuerzas y desplazamientos causados por P1 y P2 actuando separadamente (figuras No. 1.11 (b) y 1.11(c)) pueden superponerse para obtener las fuerzas y desplazamientos producidos por P1 y P2 actuando simultáneamente (figura No.1.11 (a)). Por lo tanto, se pueden escribir las siguientes ecuaciones de superposición para la viga de la figura No.1.11:
RA = RA' + RA"
RB = RB' + RB"
D = D' + D"
Figura No. 1.11. Ilustración del principio de superposición
1.6. Análisis del comportamiento estructural

CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
9
El comportamiento de una estructura, está dado por la forma como ella responde a los estí-mulos que la solicitan.
La determinación de la respuesta de la estructura en términos de las fuerzas internas que desarrolla y de los desplazamientos que experimenta, es el objetivo fundamental de su análisis. Para Norris y Wilbur el ingeniero de estructuras, debe ser capaz de analizar tres aspectos funda-mentales del comportamiento estructural:
Respuesta y características en términos de las fuerzas internas (esfuerzos) y desplaza-mientos (deformaciones) bajo condiciones de cargas estáticas.
Respuesta y características vibratorias bajo condiciones de cargas dinámicas.
Respuesta y características de la estructura bajo cargas de pandeo, normalmente estáticas, y ocasionalmente dinámicas.
De estos análisis, el caso del pandeo y características vibratorias requiere técnicas más es-pecializadas que las utilizadas para el primer caso, por lo que este tipo de análisis no se considera en el presente estudio, que se centrará en el análisis de fuerzas y desplazamientos de una estruc-tura, cuando está sometida a cargas o condiciones de deformación estáticas o casi estáticas.
Para resolver completamente tal problema es necesario obtener las fuerzas y desplazamien-tos desconocidos en cada parte de la estructura, de tal modo, que se satisfagan las condiciones de equilibrio y compatibilidad bajo las fuerzas estáticas y condiciones de borde conocidas. Estas incógnitas pueden obtenerse formulando un número apropiado de ecuaciones independientes, ob-tenidas de los tres tipos de relaciones o condiciones siguientes, que rigen el comportamiento de una estructura:
Condiciones de equilibrio estático
Condiciones de compatibilidad
Relaciones fuerza-desplazamiento
1.6.1. Condiciones de equilibrio estático:
Uno de los objetivos de cualquier análisis estructural es determinar las fuerzas característi-cas en la estructura, tales como las reacciones en los apoyos y las fuerzas internas resultantes (momento flexionante, fuerza cortante y otras). Una solución correcta para este análisis, debe satis-facer todas las condiciones de equilibrio estático, no solo para la estructura como un todo, sino también para cualquier parte de ella tomada como un cuerpo libre.
Para cualquier cuerpo libre, sujeto a un sistema general de fuerzas, la resultante de todas las fuerzas que lo solicitan puede ser una fuerza, un par o ambos. Si el cuerpo libre está en equilibrio estático, el vector fuerza resultante y el vector momento resultante ambos son cero. Un vector en un espacio tridimensional siempre puede descomponerse en tres componentes, o direcciones ortogo-nales, tales como las direcciones X, Y, Z. Si los vectores de fuerza y momento resultantes son igua-les a cero, también sus componentes deben ser iguales a cero y, por lo tanto, se pueden obtener las siguientes ecuaciones de equilibrio estático:
Fx = 0 Fy = 0 Fz =
Mx = 0 My = 0 Mz = 0 Ec. 1.1

CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
10
En estas ecuaciones las expresiones Fx, Fy Fz, son las sumas algebraicas de las componentes en X, Y, Z respectivamente, de todos los vectores de fuerza que actúan en el cuerpo libre y, Mx, My y Mx, son las sumas algebraicas de los momentos respecto a los ejes X, Y, Z; de todos los pares y fuerzas que actúan sobre el cuerpo libre. Las seis relaciones de la ecuación (1.1) representan las ecuaciones de equilibrio estático para fuerzas en tres dimensiones.
Cuando todas las fuerzas que actúan sobre un cuerpo libre están en un plano y todos los pa-res tienen sus vectores normales a ese plano, sólo son útiles tres de las seis ecuaciones de equili-brio. Suponiendo que las fuerzas están en el plano X-Y es obvio que las ecuaciones Fz =0, Mx
= 0 y My = 0 se satisfacen automáticamente. Las ecuaciones de equilibrio estático en este caso para fuerzas en el plano X-Y son:
Fx=0 Fy=0 Mz=0. Ec.1.2
Las ecuaciones de equilibrio pueden aplicarse a cualquier cuerpo libre, a la estructura, como un todo, una porción de ella, un miembro sólo o uno de sus nodos, con la finalidad de calcular las reacciones de apoyo y las fuerzas internas, resultantes en secciones de sus miembros.
Si las ecuaciones de equilibrio estático son suficientes para encontrar todas las fuerzas, tanto externas como internas, la estructura es estáticamente determinada. Si hay más fuerzas desco-nocidas que ecuaciones, la estructura es estáticamente indeterminada. La viga simplemente apo-yada mostrada en la figura 1.12(a) y la viga en voladizo de la figura 1.12 (b), son ejemplos de es-tructuras estáticamente determinadas, ya que en ambos casos todas las reacciones de apoyo y fuerzas internas pueden encontrarse a partir de las ecuaciones de equilibrio. Por otra parte, la viga continua de la figura 1.12(c) es estáticamente indeterminada, pues es imposible calcular todas las reacciones de la viga utilizando únicamente la condición de equilibrio estático, en tales casos será necesario utilizar otro medio. Esta viga continua por tener una reacción desconocida en exceso, a las pueden calcularse aplicando las tres ecuaciones de equilibrio, que no puede encontrarse por medio del equilibrio estático conocida como incógnita redundante, se define como una viga con un grado de hiperestaticidad. De este modo, una vez obtenido el valor de una reacción de apoyo en esta viga, las restantes reacciones y las fuerzas internas pueden encontrarse por medio del equili-brio estático:
Figura No. 1.12.Estructura estáticamente determinadas e indeterminadas.
1.6.2 Condiciones de compatibilidad:

CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
11
Además de las condiciones de equilibrio estático, en cualquier análisis de estructuras, es ne-cesario que se satisfagan todas las condiciones de compatibilidad. Estas condiciones se refieren a la continuidad de los desplazamientos, a lo largo de la estructura. Las condiciones de compatibili-dad deben satisfacerse en todos sus puntos, en donde es necesario que los desplazamientos de la estructura sean consistentes con las condiciones de apoyo. Por ejemplo, en un empotramiento no puede haber rotación del eje del miembro, como se indica en el empotramiento "a" de la figura No. 1.13. Las condiciones de compatibilidad también deben satisfacerse en todos los puntos interiores de la estructura. Usualmente, son las condiciones de compatibilidad en los nodos de la estructura las de mayor interés. Por ejemplo, en una unión rígida entre dos miembros los desplazamientos (traslación y rotación) deben ser los mismos en los dos miembros, como se aparecía en la figura No.1.13, para el nodo (b):
Figura No.1.13. Condición de compatibilidad
1.6.3. Relaciones fuerza-desplazamientos
Por esta condición las fuerzas y los desplazamientos calculados en cualquier miembro de la estructura deben satisfacer las relaciones constitutivas de los materiales que la forman. Por ejem-plo, en la estructura de la figura No. 1.14 suponiendo comportamiento linealmente elástico del mate-rial y sección constante, el desplazamiento u experimentado en su extremo será el que se muestra:
Figura No. 1.14. Condición de compatibilidad
Es de hacer notar, que este texto está especialmente orientado, al análisis lineal de estructu-ras estáticamente determinadas o isostáticas y en tal caso, para los efectos de cálculo de fuerzas

CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
12
sólo es necesario satisfacer las condiciones de equilibrio estático. Sin embargo, para el cálculo de desplazamientos en estructuras isostáticas deben satisfacerse las otras condiciones.
1.7. Algunas consideraciones sobre la estabilidad o inestabili- dad geométrica de los siste-mas planos.
La condición de equilibrio en los sistemas planos establece tres ecuaciones de equilibrio, por lo tanto debe haber por lo menos tres reacciones independientes para prevenir el movimiento en estos sistemas.
La inestabilidad geométrica de una estructura se presenta cuando ésta no está sujeta de ma-nera apropiada. Por esto, es necesario establecer criterios teóricos que permitan definir si un siste-ma es estable o inestable cinemáticamente. Si en un sistema plano existen menos de tres compo-nentes de reacción éste es inestable. Tal es el caso de las estructuras mostradas en la figura No. 1.15, las cuales, como se puede verificar son inestables, debido a la falta de sujeciones para preve-nir su movimiento:
Figura No.1.15. Inestabilidad debida a carencia de soporte
Con esto, se permite establecer, que siempre que el número de incógnitas de reacción sea menor que el número de ecuaciones de equilibrio disponibles, la estructura será inestable. Serán necesarios al menos tres elementos de reacción independientes, para satisfacer la condición del equilibrio estático de una estructura plana, sobre la cual actúa un sistema general de cargas.
Sin embargo, aunque la estructura tenga un número adecuado de restricciones en los sopor-tes, su arreglo o distribución puede ser de tal forma, que no pueda prevenir el movimiento provoca-do por una carga arbitrariamente aplicada, por lo que una estructura que tenga tres o más elemen-tos de reacción independientes puede también ser inestable. Para ilustrar esto considérense las estructuras de la figura No.1.16:
Figura No.1.16. Estructuras inestables
Se observa en el caso (a) que todas las reacciones que actúan sobre la estructura, concurren en el mismo punto A. En consecuencia, el sistema no puede reaccionar contra el momento provo-

CAPÍTULO I - DEFINICIONES Y CONCEPTOS BÁSICOS EN EL ANÁLISIS ESTRUCTURAL
13
cado por P, lo cual se puede verificar si se trata de sumar los momentos alrededor del punto A, ya que el momento debido a P queda desequilibrado. De esta manera, el cuerpo (a) está experimen-tando una rotación alrededor del punto A. En forma análoga el cuerpo (b) ilustra otro sistema espe-cial de fuerzas concurrentes en el punto o que no pueden resistir un momento alrededor del punto o, así este cuerpo puede rotar alrededor de o, y es geométricamente inestable. En el cuerpo (c) las fuerzas paralelas verticales no pueden resistir una carga horizontal, el cuerpo experimenta trasla-ción en la dirección X.
Laible J establece que si alguna distribución arbitraria de cargas no puede ser resistida por una estructura, entonces la estructura es inestable.
Las estructuras inestables, mostradas anteriormente en las figuras 1.15 y 1.16, pueden lle-varse a estables, con capacidad de resistir cualquier sistema de cargas que se les aplique, con sólo incluir un apoyo o cambiar la disposición de éstos, como se aprecia en la figura 1.17:
Figura No. 1.17. Estructuras estables
Es importante destacar, que la inestabilidad geométrica (cinemática) de una estructura, se establece independiente de las cargas, pero sí, involucra la geometría de la estructura, la ubicación y orientación de las fuerzas reactivas.
Toda una teoría formal sobre la definición precisa de la estabilidad o inestabilidad cinemática de los sistemas planos es tratada en el capítulo II de este texto.