Tema 6. Respuesta en Frecuencia de Sistemas n Autom ...asvazquez/docus/regulacion...1 Tema 6....
8
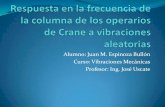
1 Regulación Automática Tema 6. Respuesta en Frecuencia de Sistemas Realimentados 6.1 Estabilidad Relativa 2º Cuatrimestre. Curso 2007-2008 Criterio de Nyquist hasta ahora utilizado para estudiar la estabilidad absoluta de un sistema Es sistemas de fase mínima, la proximidad al punto –1 +0j nos da la estabilidad relativa del sistema Ejemplo: () () ( )( ) K GsHs ss a s b = + + Lugar de las raíces Diagrama Nyquist Respuesta del sistema Estabilidad relativa expresada mediante “margen de ganancia” y margen de fase” k1 k2 k3 k1 k1 k2 k2 k3 k3
Transcript of Tema 6. Respuesta en Frecuencia de Sistemas n Autom ...asvazquez/docus/regulacion...1 Tema 6....
-
1
Regulación AutomáticaTema 6. Respuesta en Frecuencia de SistemasRealimentados
6.1 Estabilidad Relativa
2º Cuatrimestre. Curso 20072008
Criterio de Nyquist hasta ahora utilizado para estudiar la estabilidad absoluta de un sistema
Es sistemas de fase mínima, la proximidad al punto –1 +0j nos da la estabilidad relativa del sistema
Ejemplo: ( ) ( ) ( )( )KG s H s
s s a s b=
+ +
Lugar de las raíces Diagrama Nyquist Respuesta del sistema
Estabilidad relativa expresada mediante “margen de ganancia” y margen de fase”
k1k2k3
k1
k1
k2
k2
k3
k3
-
2
Regulación Automática6.2 Margen de Ganancia y Fase(I)
2º Cuatrimestre. Curso 20072008
Forma de expresar la proximidad de G(jw)H(jw) a –1 + 0j
Frecuencia de cruce de fase (de oscilación). La frecuencia para la cual el ángulo de fase de G(jw)H(jw) es –180º
Frecuencia de cruce de ganancia. La frecuencia para la que el módulo de G(jw)H(jw) es 1
Margen de Ganancia. MgFactor que puede aumentar/disminuir la ganancia para que el sistema se vuelva inestable/estable con
wϕϕ
( ) ( ) 180G jw H jwϕ ϕϕ �� = −��
( ) ( ) 1g gG jw H jw =
gw
( ) ( ) 11
( ) ( )
[ ] 20 log ( ) ( )
g
g
g
M G jw H jw
MG jw H jw
M db G jw H jw
ϕ ϕ
ϕ ϕ
ϕ ϕ
=
=
= −
Mg > 1 (>0 en dB) sistema estableMg = 1 (0 en dB) marginalmente estable (oscilante)Mg
-
3
Regulación Automática6.2 Margen de Ganancia y Fase(II)
2º Cuatrimestre. Curso 20072008
Margen de Fase. MfÁngulo restante para que el sistema se vuelva estable/inestable cuando se toma la frecuencia
Ambos indicadores utilizados para el estudios de sistemas, aunque a veces carecen de sentido (ejemplo margen de ganancia en sistemas de orden2)
Norma prácticaMf= 30º60º y Mg >= 6dB
Representación en el diagrama de bode
gw
180
180 ( ) ( )f
f g g
M
M G jw H jw
ϕ
ϕ
− = −
��= + ��
Mf > 0 Sistema estableMf = 0 Marginalmente estable(oscilante)Mf
-
4
Regulación Automática6.2 Margen de Ganancia y Fase(III)
2º Cuatrimestre. Curso 20072008
Representación en el diagrama de Black o amplitudfasegw w estableϕ< gw w inestableϕ>
Representación en bode de Mg y Mf (continuación)
-
5
Regulación Automática6.3 Especificaciones en el dominio de la frecuencia
2º Cuatrimestre. Curso 20072008
Respuesta en frecuencia. Estudio del comportamiento en régimen permanente ante excitaciones senoidales. En principio no aporta información sobre respuesta transitoriaEn sistemas de segundo orden si se puede estableces equivalencia entre frecuencia y respuesta transitoriaPor ejemplo utilizando el concepto de Pico de Resonancia y frecuencia de resonancia
Recordemos: Forma adimensional de una función de transferencia de un sistema de segundo orden:
A partir de podemos hallar que nos dan la respuesta transitoria del sistema, ,nw kξ , ,p r sM t t
2
2 2( ) 2n
n n
KwM ss w s wξ
=+ +
rw
2
2
(0)
1 21( )
1
r n
r r
G k
w w
M G w
ξ
ξ
=
= −
= =−
rM
-
6
Regulación Automática6.3 Ábacos de Hall y Nichols (I)
2º Cuatrimestre. Curso 20072008
Sirven para obtener la respuesta frecuencial en lazo cerrado a partir de la de en lazo abierto
Ábaco de Hall Lugar de Módulo Constante
Lugar de fase constante
2 2 2 22 2
2 22 2| ( ) | ( )
1 1(1 )x y M MM M jw x y
M Mx y+
= = + + =− −+ +
;
2
2
2
( ,0)1
1
McentroM
MradioM
= −−
=−
22 2
2 2 21 1 1( ) ( )2 2 4
y NN x yx y x N N
+= + + − =+ +
;
2
( 1/ 2,1/ 2 )
1 1/ / 2
centro N
radio N N
= −
= +
-
7
Regulación Automática6.3 Ábacos de Hall y Nichols (II)
2º Cuatrimestre. Curso 20072008
Ejemplo ábaco de Hall
-
8
Regulación Automática6.3 Ábacos de Hall y Nichols (III)
2º Cuatrimestre. Curso 20072008
Ábaco de NicholsUtiliza los lugares M y N en el diagrama de BlackSe extiende desde 0 a –360º. Simétrico respecto a la fase –180º. M y N convergen en 0 db y –180º