TEMA 9 DISEÑO REGULADORES EN LUGAR d. RAÍCES
23
Apuntes de regulación Automática. Prácticas y Problemas. - 1 - TEMA 9 DISEÑO REGULADORES EN LUGAR d. RAÍCES 9.- OBJETIVOS Conocida la forma de analizar la respuesta dinámica de los sistemas continuos, se pretende ahora abordar el problema de modificar dicha respuesta para que se ajuste a ciertas especificaciones de funcionamiento. Es el problema del diseño de reguladores, y en esta practica se mostrará la forma de diseñar un tipo de reguladores ampliamente utilizados: los reguladores de tipo PID. Este tipo de reguladores se caracteriza porque ofrecen la posibilidad de aplicar tres tipos de acciones de control sobre el proceso. Cada una de estas acciones de control se aplicará para conseguir distintos tipos de efectos en la respuesta del sistema. El proceso de diseño del regulador se realizará mediante el ajuste de los tres parámetros que caracterizan su función de transferencia (cada uno de ellos asociado a un tipo de acción de control), a partir de la información que ofrece el lugar de las raíces del sistema. Elementos del tema 1. – Metodología del diseño de reguladores 2. – Acciones básicas de control 3. – Regulador proporcional (P) 4. – Regulador proporcional - integral (PI) 5. – Regulador proporcional - derivada (PD) 6. – Regulador proporcional - integral - derivada (PID) 9.1. – METODOLOGÍA DEL DISEÑO DE REGULADORES Se estudia el diseño del regulador, que unido al proceso o planta que se pretende controlar, -según la figura- consiga que el sistema se comporte de acuerdo a unas especificaciones, que caracterizan la respuesta temporal y estacionaria deseada. Se podrían adoptar otras soluciones en cuanto al modo de acoplar el regulador, pero en la mayoría de los casos, el acople en serie, es mas que suficiente. En este proceso de diseño se pueden seguir dos métodos: el método de síntesis y el método de análisis. + - G P (s) Y(s) R(s) H(s) G R (s) E(s) U(s) El método de síntesis pretende obtener la función de transferencia del regulador (G R (s)), directamente a partir las funciones de transferencia del proceso y la cadena de realimentación (G P (s) y H(s)), calculando la FDT total del sistema con un regulador acoplado, tal que de acuerdo con las especificaciones deseadas, la FDT del sistema global las cumpla. El valor del regulador a acoplar se determina por las especificaciones deseadas, y mediante métodos matemáticos se obtiene la FDT del regulador necesario, y por diferentes métodos de síntesis se obtienen los componentes a añadir. Pero eso conducía a reguladores complejos de montar y ajustar, aunque fue el método propugnado en los primeros sistemas de diseño utilizando para el cálculo Programas de ordenador que se encargaban de todo el proceso. El siguiente ejemplo, que debes realizar con ayuda del CC, mostrará cual es el proceso a seguir. Se supone un sistema como el de la figura anterior, en el que las FDT del proceso y la cadena de realimentación son las que se indican a continuación, y para el que se pretende diseñar un regulador que haga que el sistema global cumpla las siguientes especificaciones: 6 4 ) ( 6 5 ) 2 ( 3 ) ( 2 + = − + + = s s H s s s s G P ⎪ ⎩ ⎪ ⎨ ⎧ = = unitaria estática Ganancia segundos t iento establecim de Tiempo ación Sobreoscil ciones Especifica e 4 : %) 98 ( % 10 : %) 98 ( δ
Transcript of TEMA 9 DISEÑO REGULADORES EN LUGAR d. RAÍCES

Apuntes de regulación Automática.
Prácticas y Problemas.
- 1 -
TEMA 9
DISEÑO REGULADORES EN LUGAR d. RAÍCES 9.- OBJETIVOS
Conocida la forma de analizar la respuesta dinámica de los sistemas continuos, se pretende ahora abordar el problema de modificar dicha respuesta para que se ajuste a ciertas especificaciones de funcionamiento. Es el problema del diseño de reguladores, y en esta practica se mostrará la forma de diseñar un tipo de reguladores ampliamente utilizados: los reguladores de tipo PID.
Este tipo de reguladores se caracteriza porque ofrecen la posibilidad de aplicar tres tipos de acciones de control sobre el
proceso. Cada una de estas acciones de control se aplicará para conseguir distintos tipos de efectos en la respuesta del sistema. El proceso de diseño del regulador se realizará mediante el ajuste de los tres parámetros que caracterizan su función de transferencia (cada uno de ellos asociado a un tipo de acción de control), a partir de la información que ofrece el lugar de las raíces del sistema. Elementos del tema 1. – Metodología del diseño de reguladores 2. – Acciones básicas de control 3. – Regulador proporcional (P) 4. – Regulador proporcional - integral (PI) 5. – Regulador proporcional - derivada (PD) 6. – Regulador proporcional - integral - derivada (PID)
9.1. – METODOLOGÍA DEL DISEÑO DE REGULADORES
Se estudia el diseño del regulador, que unido al proceso o planta que se pretende controlar, -según la figura- consiga que el sistema se comporte de acuerdo a unas especificaciones, que caracterizan la respuesta temporal y estacionaria deseada. Se podrían adoptar otras soluciones en cuanto al modo de acoplar el regulador, pero en la mayoría de los casos, el acople en serie, es mas que suficiente. En este proceso de diseño se pueden seguir dos métodos: el método de síntesis y el método de análisis.
+
-GP(s)
Y(s)R(s)
H(s)
GR(s)E(s) U(s)
El método de síntesis pretende obtener la función de transferencia del regulador (GR(s)), directamente a partir las funciones
de transferencia del proceso y la cadena de realimentación (GP(s) y H(s)), calculando la FDT total del sistema con un regulador acoplado, tal que de acuerdo con las especificaciones deseadas, la FDT del sistema global las cumpla. El valor del regulador a acoplar se determina por las especificaciones deseadas, y mediante métodos matemáticos se obtiene la FDT del regulador necesario, y por diferentes métodos de síntesis se obtienen los componentes a añadir.
Pero eso conducía a reguladores complejos de montar y ajustar, aunque fue el método propugnado en los primeros sistemas
de diseño utilizando para el cálculo Programas de ordenador que se encargaban de todo el proceso. El siguiente ejemplo, que debes realizar con ayuda del CC, mostrará cual es el proceso a seguir. Se supone un sistema como
el de la figura anterior, en el que las FDT del proceso y la cadena de realimentación son las que se indican a continuación, y para el que se pretende diseñar un regulador que haga que el sistema global cumpla las siguientes especificaciones:
64)(
65)2(3)( 2 +
=−+
+=
ssH
ssssGP
⎪⎩
⎪⎨
⎧=
=
unitariaestáticaGananciasegundostientoestablecimdeTiempo
aciónSobreoscilcionesEspecifica e 4:%)98(
%10:
%)98(
δ

Apuntes de regulación Automática.
Prácticas y Problemas.
- 2 -
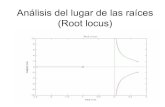
Se pide obtener la función de transferencia M(s) de un sistema de segundo orden, cuya respuesta cumpla con las
especificaciones anteriores. Representa en la gráfica adjunta la respuesta de dicho sistema ante escalón unitario y comprueba sobre ella que se cumplen las especificaciones pedidas.
M(s) = ⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯
Dado que se sabe la relación entre los elementos del bucle de realimentación y la FDT global del sistema, que ésta última
está determinada por las especificaciones y que en el bucle de realimentación todas las FDTs son conocidas excepto la del regulador, se puede diseñar el regulador según las siguientes expresiones:
M s G s G sG s G s H s
G s M sG s G s H s M s
R P
R PR
P P
( ) ( ) ( )( ) ( ) ( )
( ) ( )( ) ( ) ( ) ( )
=⋅
+ ⋅ ⋅⎯ →⎯ =
− ⋅ ⋅1
A partir de la expresión anterior y, con ayuda del CC, determina la FDT del regulador necesario para cumplir las
especificaciones pedidas. Determina la FDT del bucle cerrado (incluyendo el regulador diseñado) y comprueba que es equivalente a la FDT obtenida a partir de las especificaciones.
GR(s) = ⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯
El problema con este método de diseño de reguladores es que, si bien desde el punto de vista matemático resulta exacto, la FDT del regulador que se obtiene suele ser excesivamente complicada con lo que resulta difícil (e incluso, en ocasiones, imposible) su implementación práctica empleando componentes analógicos (resistencias, bobinas, condensadores, amplificadores operacionales,...).
Además cada regulador ha de ser construido y ajustado específicamente para cada proceso, lo que no es muy útil en cuanto
a normalización del procesos, y los componentes a utilizar en el montaje, producen errores dada la tolerancia de los componentes electrónicos utilizados, pues solo con estos era posible realizarlo.

Apuntes de regulación Automática.
Prácticas y Problemas.
- 3 -
Para comprobar esto, repite el ejercicio anterior con las mismas especificaciones pero empleando las FDTs siguientes:
G ss s s
H ssP ( )
( )( )( )=
+ − +=
+3
5 6 24
62
GR(s) = ⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯
Comprueba que con el regulador anterior, la FDT del bucle cerrado es equivalente a la obtenida con las especificaciones.
¿Cuál es el problema con el regulador anterior?. ¿Por qué no es físicamente implementable?. Pero el problema de realizar el regulador, hace que el método de síntesis no sea utilizado en el diseño de reguladores
continuos. Si se emplea diseño de reguladores discretos, pues el regulador es un programa en un computador, y así implementar el regulador, por complicada que sea su FDT. Pero para reguladores continuos, con elementos analógicos, se emplea el método de análisis. Consiste en el ajuste de los parámetros del regulador, en función de la dinámica del proceso y de las especificaciones deseadas. Vamos averlo.
9.2. – ACCIONES BÁSICAS DE CONTROL
Las acciones de control son las señales generadas por el regulador que actúan sobre el proceso para que el comportamiento del sistema global cumpla las especificaciones deseadas. Dichas acciones de control no son más que una función matemática de la señal de error (que es la entrada del regulador).
u t e tf( ) ( )( )=
No se puede emplear cualquier función por ser imposible su implementación física con componentes analógicos, ni todas
las posibles acciones posibles sobre el error, tienen utilidad práctica Es necesario, por tanto, utilizar acciones de control sencillas, cuya implementación física sea eficiente y económica, y en todo caso con la combinación de estas acciones sencillas, se intentarán conseguir los efectos deseados para gobernar el proceso de acuerdo a las especificaciones pedidas.
Las acciones básicas de control que se describen son:.
∗ Acción proporcional : u t K e tp( ) ( )= ⋅
Se caracteriza por ser proporcional a la señal de error, las acciones aplicadas sobre el proceso son proporcionalmente mayores cuanto mayor es el error cometido (es decir, cuanto mayor sea la diferencia entre el valor actual y el deseado de la salida del sistema). Es un control de presente, la acción de control en cada instante depende de lo que está sucediendo en ese instante. Es similar a desplazarnos a lo largo del lugar de las raíces del sistema.
El regulador que únicamente aplica una acción de control proporcional tiene la FDT siguiente:
G s U sE s
KR p( ) ( )( )
= =
Representa en las gráficas siguientes la respuesta del regulador anterior frente a entradas en escalón unitario, rampa unitaria

Apuntes de regulación Automática.
Prácticas y Problemas.
- 4 -
y parábola unitaria, con constantes de proporcionalidad 0.5 y 2. Observa en ellas como la acción de control en cada instante de tiempo es igual al error multiplicado por la constante de proporcionalidad.
Error escalón unitario
Error rampa unitaria
Error parábola unitaria
∗ Acción derivada : u t K e td
ddt
( ) ( )= ⋅
A diferencia de la anterior, en este caso la acción de control no es proporcional al error sino a la derivada del error en cada
instante. Las acciones aplicadas sobre el proceso ya no dependen de la magnitud del error sino que ahora son mayores cuanto mayor es la variación del error, es decir la velocidad con la que está cambiando.
Esta acción de control intenta corregir el error antes de que se produzca, puesto que la derivada de una función en un punto,

Apuntes de regulación Automática.
Prácticas y Problemas.
- 5 -
nos da la pendiente en ese punto, la tendencia futura con la que seguiría cambiado la función si todo ocurriera como en este instante. La acción de control derivada ejerce un control de futuro. No es necesario que los errores se hagan grandes para que el
regulador actúe, basta que la pendiente (velocidad de cambio), del error sea grande. El regulador observa que la respuesta del sistema está cambiando con demasiada rapidez (esto es, su derivada es demasiado grande) y actúa tratando de resolver un problema que se va a producir. La ventaja de la acción derivada sobre la proporcional es que el sistema gana en estabilidad, pues corrige los errores antes de que se produzcan, se reduce la amplitud de las oscilaciones que pueden aparecer a la salida. El problema es que mientras el error se mantenga constante, la derivada del error es nula, y por tanto no existe acción de control, mientras no hay cambios, la derivada es nula.
El regulador que únicamente aplica una esta acción tiene la FDT siguiente:
G s U sE s
K sR d( ) ( )( )
= = ⋅
De la misma forma que en caso anterior, representa en las gráficas siguientes la respuesta del regulador anterior (que sólo aplica una acción de control derivada) frente a entradas en escalón unitario, rampa unitaria y parábola unitaria, con constantes de proporcionalidad 0.75 y 10. Observa en ellas como la acción de control es la derivada del error escalada por la constante Kd.
Error escalón unitario
Error rampa unitaria
Error parábola unitaria

Apuntes de regulación Automática.
Prácticas y Problemas.
- 6 -
∗ Acción integral : u t K e dio
t
( ) ( )= ⋅ ∫ τ τ
Esta acción de control es proporcional a la integral del error, desde el instante inicial de aplicación de la referencia al
sistema hasta el instante actual. De este modo, las acciones serán grandes cuando el error haya sido grande durante un periodo de tiempo suficientemente largo. La acción integral es considerada como un control de pasado, ya que depende de la historia del error, actúa según la acumulación, suma, de errores que haya tenido lugar desde el comienzo del funcionamiento. Pero cuando se hubiera conseguido la salida exacta, sin error, la acción de control seguiría todavía existiendo, se pasaría aunque el error fuera cero. La acción integral hace que el sistema gane en precisión, pues aumenta el tipo del sistema, lo cual se observa en la FDT del regulador que ejerce acción integral. El problema es que el sistema se inestabiliza por tener un polo (que será un punto inicial del lugar de las raíces) sobre el eje imaginario en s = 0. Al integrar, el error se va acumulando y las acciones de control pueden hacerse muy grandes lo que inestabilizaría el sistema.
G s U sE s
KsR
i( ) ( )( )
= =
Representa en las gráficas siguientes la respuesta del regulador anterior frente a entradas en escalón unitario, rampa unitaria y parábola unitaria, con constantes de proporcionalidad 0.25 y 1.5. Observa en ellas como la acción de control es la integral del error escalada por la constante Ki.
Error escalón unitario
Error rampa unitaria
Error parábola unitaria

Apuntes de regulación Automática.
Prácticas y Problemas.
- 7 -
Todos tienen ventajas e inconvenientes, y se utilizan combinaciones, según el resultado deseado, los reguladores a utilizar pues serán:
- Regulador Proporcional. - Regulador Proporcional Derivada. - Regulador Proporcional Integral. - Regulador proporcional, Integral y Derivada.
Todos ellos se consiguen cambiando los parámetros del regulador PID, poniendo una u otra acción de control..
9.3. – REGULADOR PROPORCIONAL (P)
El regulador proporcional, aplica la acción proporcional, y desplazar la posición de los polos en bucle cerrado del sistema, en lugar de las raíces. Como las características de la respuesta transitoria depende de la posición de los polos, este regulador sólo sirve cuando las especificaciones deseadas, coincidan con un punto del lugar. El error en régimen estacionario será función del tipo, y del valor de K, en el punto dado.
El diseño debe determinar un punto del plano complejo que pertenezca al lugar de las raíces y cumpla las especificaciones
dinámicas a la vez, así calcular la ganancia del regulador que lleva los polos en bucle cerrado a ese punto, por aplicación del criterio del módulo. En este punto, los polos se sitúan en los puntos correspondientes a las especificaciones dinámicas, y deben ser los polos dominantes del sistema en bucle cerrado. Además, el hecho de que los polos dominantes estén en dichos puntos no garantiza que las especificaciones dinámicas vayan a cumplirse, ya que la respuesta del sistema se verá afectada por el resto de polos BC (en el caso de que los haya) y por los ceros BC (que pueden existir y ni siquiera aparecen en el lugar de las raíces) sobre los que no se ha impuesto ninguna condición acerca de la posición que deben ocupar. Por ello puede haber ligeras diferencias.
Ajustada la posición de los polos en BC por la ganancia del regulador K, las especificaciones dinámicas se cumplen, pero
será necesario, comprobar que es cierto, y no se desvía mucho. El siguiente paso es comprobar si se cumplen las especificaciones estáticas, el comportamiento del sistema en régimen permanente, error. En general, estas especificaciones indicarán el error máximo en régimen permanente que puede presentar el sistema en bucle cerrado. Si se cumplen, el diseño del regulador ha terminado. En caso de que no se cumplan, se puede intentar elegir otro punto distinto del lugar de las raíces que pertenezca a la zona de especificaciones dinámicas que permita cumplir el error. Es importante tener en cuenta que para minimizar el error en régimen permanente será necesario hacer la ganancia del regulador lo más grande posible.
Si no hay forma de cumplir las especificaciones estáticas habrá que buscar otro tipo de regulador. Una posible solución es
emplear el regulador PI, que al incluir acción integral, aumentará el tipo del sistema con lo que reducirá el error en régimen permanente. Estos reguladores se verán en el punto siguiente. A modo de ejemplo del proceso de diseño del regulador P, se va a emplear el sistema cuyas FDTs y especificaciones deseadas aparecen a continuación.
2)()3)(1(
5)( =++
= sHss
sGP
⎪⎩
⎪⎨
⎧
≤≤
≤
%30:2:%)98(
%10:
%)98(
p
e
eposicióndeErrorsegundostientoestablecimdeTiempo
aciónSobreoscilcionesEspecifica
δ
Diseño: • Trazar el lugar de las raíces del proceso en la gráfica siguiente. • Indicar la zona de puntos del plano complejo que cumplen las especificaciones dinámicas. • Determina un punto del plano complejo que pertenezca al lugar de las raíces y que este dentro de la zona de
especificaciones. En el caso de que haya más de una posibilidad, cuanto mayor sea la ganancia del lugar de las raíces es mas probable se cumplan las especificaciones estáticas. ¿Cuál es el punto del plano complejo que conviene escoger en este caso?

Apuntes de regulación Automática.
Prácticas y Problemas.
- 8 -
s = -σ ± ωp j =
Determina, por medio del criterio del módulo cual es el valor de la ganancia del regulador proporcional a situar en serie con
el proceso para que los polos BC del sistema estén en los puntos elegidos.
KL = Kr =
Construye la FDT de sistema en bucle cerrado (incluyendo el regulador diseñado) y comprueba mediante el comando PZF
del CC que los polos BC del sistema están en los puntos elegidos. Representa la respuesta temporal del sistema completo ante entrada en escalón indicando sobre ella el cumplimiento de las especificaciones dinámicas.
M(s) = ⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯
¿Se cumple la especificación estática?. ¿Es necesario que el regulador incluya efecto integral?. ¿Qué sucedería con las
especificaciones tanto estáticas como dinámicas si se hubiera escogido el punto del plano complejo s = -2 ± 1j en lugar del anterior?

Apuntes de regulación Automática.
Prácticas y Problemas.
- 9 -
9. 4. – REGULADOR PROPORCIONAL - INTEGRAL (PI)
Si con el regulador proporcional es cumplen las especificaciones dinámicas pero no las estáticas, pues el sistema tiene error mayor del pedido, se puede emplear un regulador PI, además de la acción proporcional, incluye acción integral, que mejora la precisión del sistema. Pues el integrador aumenta el tipo de conjunto, lo que mejora “un nivel” la precisión del sistema, si el error de posición era constante ahora será nulo, si el error de velocidad era infinito ahora será constante, etc.. Si situara solo un polo en el origen para aumentar el tipo del sistema, la forma del lugar de las raíces cambiaría totalmente, y no cumpliría las especificaciones dinámicas, para evitarlo además del polo en el origen, se añade un cero próximo para que su efecto se compense y la respuesta dinámica se vea afectada de forma despreciable.
La FDT del regulador PI es la siguiente: ⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
+=⎟⎟⎠
⎞⎜⎜⎝
⎛ +=+=
sTK
s
sK
sK
KsGi
rT
ri
pRi 11)(
1
El regulador PI tiene un polo en el origen (s = 0) y un cero en s = -1/Ti. El parámetro Ti, que determina la posición del cero se conoce como tiempo de integración. Si el cero se pone muy cerca del polo (Ti grande), la modificación del lugar de las raíces es pequeña, pero el inconveniente es que la acción integral es pequeña y se tarda mucho tiempo en cancelar los errores. Por el contrario, si el polo está alejado (Ti pequeño), el regulador tiene mucha acción integral y, con ello los errores se cancelan pronto, pero el lugar de las raíces se modifica demasiado, hasta el punto que puede suceder que los polos BC se salgan de la zona correspondiente a las especificaciones dinámicas. Hay que llegar a un compromiso y el criterio que se suele seguir se basa en la parte real de los polos BC dominantes:
iT1
10≈
σ
Elegido el tiempo de integración, el lugar de las raíces ha cambiado poco, no es necesario volver a ajustar la acción proporcional, y ya está determinada completamente la FDT del regulador. Como ejemplo de diseño del regulador PI, se va a realizar sobre el sistema del apartado anterior teniendo en cuenta que las especificaciones estáticas se han vuelto más exigentes.
⎪⎩
⎪⎨
⎧
≤≤
≤
%20:2:%10:
p
e
eposicióndeErrorsegundostientoestablecimdeTiempo
aciónSobreoscilcionesEspecifica
δ
Comprueba que con la Kr obtenida en el apartado anterior el error de posición es demasiado grande.

Apuntes de regulación Automática.
Prácticas y Problemas.
- 10 -
¿Por qué no se puede mejorar el error de posición haciendo más grande la ganancia del regulador?. Siguiendo el criterio de σ/10 determina el tiempo de integración y con él la FDT del regulador PI. Construye la FDT global
del sistema en bucle cerrado y comprueba que dos de los polos BC están aproximadamente en los puntos correspondientes a las especificaciones dinámicas.
Ti =
GR(s) =
M(s) = ⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯
Nota que la FDT tiene un tercer polo y un cero adicionales. ¿Tendrán influencia en la respuesta del sistema?. Repite el
ejercicio empleando el criterio de σ/5 y representa juntas en la gráfica siguiente, las respuestas del sistema en bucle cerrado en ambos casos. ¿Qué respuesta es mejor desde el punto de vista dinámico?. ¿Y desde el punto de vista estático?.
Ti =
GR(s) =
M(s) = ⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯

Apuntes de regulación Automática.
Prácticas y Problemas.
- 11 -
9. 5. – REGULADOR PROPORCIONAL - DERIVADA (PD)
Los reguladores PD son aquellos que aplican las acciones de control proporcional al error y a la derivada del error al mismo tiempo. La inclusión de la acción derivada permite mejorar la respuesta transitoria del sistema al modificar la forma del lugar de las raíces, haciendo que pase por aquellos puntos del plano complejo correspondientes a las especificaciones dinámicas que se desea conseguir. Se emplean cuando las ramas dominantes del lugar de las raíces no pasan por el área correspondiente a las especificaciones dinámicas. El cero correspondiente al derivador modificará la forma del lugar de las raíces haciendo que pase por la zona deseada.
La FDT del regulador PD es la siguiente: ( ) ( )sTKsTKsKKsG drTdrdpR d⋅+=+⋅=⋅+= 1)( 1
De la expresión anterior se deduce que el incluir un regulador PD en el sistema supone la adición de un cero en la posición
1/Td. El parámetro Td, que determina la posición del cero, recibe el nombre de tiempo de derivación. Esta posición será ajustada convenientemente para hacer que el lugar de las raíces pase por los puntos deseados, por aplicación del criterio del argumento. Una vez hecho esto, la ganancia del regulador será ajustada (por medio del parámetro Kp) para llevar los polos BC a los puntos deseados.
Se va a diseñar un regulador PD para el proceso del ejemplo del apartado anterior, con unas nuevas especificaciones más
exigentes desde el punto de vista dinámico.
⎪⎩
⎪⎨
⎧
≤≤
≤
%20:1:%)98(
%10:
%)98(
p
e
eposicióndeErrorsegundotientoestablecimdeTiempo
aciónSobreoscilcionesEspecifica
δ
Traza el lugar de las raíces del proceso indicando sobre él la zona de puntos que cumplen las especificaciones dinámicas.
Razona porque es necesaria la acción derivada y en que zona del eje real habrá que situar el cero para conseguir el efecto deseado.

Apuntes de regulación Automática.
Prácticas y Problemas.
- 12 -
De todos los posibles puntos del área de especificaciones dinámicas, determina uno donde se van a intentar situar los polos
BC para que el sistema cumpla en el límite las especificaciones dinámicas.
s = -σ ± ωp j =
Aplicando el criterio del argumento determina cual es el ángulo que deberá formar el cero de la acción derivada con el
punto escogido, para que el lugar de las raíces pase por este último. A partir de dicho ángulo, determina la posición del cero y, con ella, el tiempo de derivación del regulador PD.
θ = z = 1/Td = Td =
Con el ajuste anterior se asegura que el lugar de las raíces pasa por el punto deseado. Aplicando el criterio del módulo
determina el parámetro Kp del regulador PD, para que los polos BC se desplacen hasta los puntos deseados. Hay que tener en cuenta que la FDT del regulador PD forma parte de la ecuación característica. KL = Kr =
Conocidos todos los parámetros, construye la FDT del regulador PD y con ella la FDT del sistema en bucle cerrado en
formato de polos y ceros. Comprueba que los polos BC están en las posiciones deseadas. Representa en la siguiente gráfica la respuesta del sistema en bucle cerrado ante escalón unitario, comprobando que el sistema controlado con el regulador diseñado cumple las especificaciones dinámicas deseadas.
GR(s) =
M(s) = ⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯

Apuntes de regulación Automática.
Prácticas y Problemas.
- 13 -
Representa sobre la siguiente figura el lugar de las raíces modificado con la adición del cero del derivador. Comprueba sobre la gráfica que el lugar de las raíces ahora pasa por la zona de puntos del plano complejo que corresponden a las especificaciones dinámicas deseadas. ¿Dónde están situados los polos en bucle cerrado del sistema?. ¿Cuáles son las especificaciones dinámicas que corresponden a ese punto?.

Apuntes de regulación Automática.
Prácticas y Problemas.
- 14 -
Comprueba analíticamente que se cumple la especificación estática. Si al sistema se exigiera un error de posición menor del 5%, ¿hubiera sido más interesante escoger otro punto del plano complejo donde las especificaciones dinámicas fueran más exigentes?. ¿Y si se exige error de posición nulo?.
9.6. – REGULADOR PROPORCIONAL - INTEGRAL - DERIVADA (PID)
Cuando en un sistema de control se exigen unas especificaciones dinámicas que con el lugar de las raíces del proceso no se
pueden conseguir, se incluye acción derivada mediante un regulador PD. Si, una vez ajustado el regulador PD, no se cumplen las especificaciones estáticas, puede ser necesario incluir acción integral para aumentar el tipo del sistema y, con ello, hacer que se cumplan. Esto da lugar el regulador PID que es el que incluye las tres accione básicas de control.
La FDT del regulador PID es la siguiente: ⎟⎟⎠
⎞⎜⎜⎝
⎛⋅′
+⋅′+′=+⋅+=sT
sTKs
KsKKsGi
dri
dpR11)(
El proceso de diseño de este regulador comienzo con el diseño de un regulador PD como se hizo en el apartado anterior
(parámetros Kr y Td). Una vez hecho esto y comprobado que no se cumplen las especificaciones estáticas, se ajustará la acción integral procurando que no modifique demasiado la forma del lugar de las raíces y, por tanto, las especificaciones dinámicas, de la misma forma que se hizo en el caso del regulador PI (parámetro Ti). Incluida la acción integral, no suele ser necesario pero si es conveniente recalcular las acciones derivada y proporcional (parámetros Kr y Td) teniendo en cuenta la pareja polo-cero añadida.
De esta forma, no se ha diseñado realmente un regulador PID sino un regulador PD puesto en serie con un PI. Los
verdaderos parámetros del regulador PID se obtienen a partir de los anteriores mediante las siguientes expresiones, que son las que proporcionan los valores de los tres parámetros característicos de un regulador PID industrial:
( ) ( ) ( )i
d
i
d
i
dTT
iiTT
ddTT
rr TTTTKK +=′+=′+=′ 1;1;1 Sobre el ejemplo de los apartados anteriores, considerando las especificaciones que se indican a continuación, va a ser
necesario un regulador PID.
⎪⎩
⎪⎨
⎧≤
≤
nuloposicióndeErrorsegundotientoestablecimdeTiempo
aciónSobreoscilcionesEspecifica e 1:%)98(
%10:
%)98(
δ
Puesto que las especificaciones dinámicas son las mismas que en apartado anterior, el regulador PD será el mismo. ¿Se
cumple la especificación estática?. ¿Hay alguna forma de que se cumpla sin incluir acción integral?. Dado que es imposible, calcular el valor del parámetro Ti por medio del criterio de σ/10.
Ti =
Recalcula la posición del cero del derivador, así como la ganancia proporcional considerando la nueva pareja polo-cero
añadida. Comprueba que realmente los parámetros del regulador PD han variado poco.
θ = z = 1/Td = Td =
KL = Kr =

Apuntes de regulación Automática.
Prácticas y Problemas.
- 15 -
Determina los verdaderos parámetros del regulador PID y construye su función de transferencia. Con ella determina la FDT del sistema en bucle cerrado, comprobando que dos de los polos BC están en las posiciones deseadas y que el tercero (el que proviene del integrador) tiene poca influencia en el régimen transitorio. Representa la respuesta del sistema ente escalón unitario en la gráfica adjunta indicando sobre ella las especificaciones, tanto estáticas como dinámicas.
K’r = T’d = T’i =
GR(s) =
M(s) = ⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯

Apuntes de regulación Automática.
Prácticas y Problemas.
- 16 -
Problema resuelto:

Apuntes de regulación Automática.
Prácticas y Problemas.
- 17 -

Apuntes de regulación Automática.
Prácticas y Problemas.
- 18 -

Apuntes de regulación Automática.
Prácticas y Problemas.
- 19 -

Apuntes de regulación Automática.
Prácticas y Problemas.
- 20 -
A a

Apuntes de regulación Automática.
Prácticas y Problemas.
- 21 -
Para el sistema 2)(ciónrealimenta)3)(1(
1)( =++
= sHconsss
sGP
%30:42.04%)98(
7.0:
≤
>
<
vevelocidaddeError
segientoestablecimdeTiempo
ientoamortiguamdeeCoeficientcionesEspecifica ζ
Diseño: • Trazar el lugar de las raíces del proceso en la gráfica siguiente.

Apuntes de regulación Automática.
Prácticas y Problemas.
- 22 -
• Indicar la zona de puntos del plano complejo que cumplen las especificaciones dinámicas. • Determina un punto del plano complejo que pertenezca al lugar de las raíces y que este dentro de la zona de
especificaciones. En el caso de que haya más de una posibilidad, cuanto mayor sea la ganancia del lugar de las raíces es mas probable se cumplan las especificaciones estáticas. ¿Cuál es el punto del plano complejo que conviene escoger en este caso?
s = -σ ± ωp j =
Determina, por medio del criterio del módulo cual es el valor de la ganancia del regulador proporcional a situar en serie con el proceso para que los polos BC del sistema estén en los puntos elegidos. KL = Kr =
Construye la FDT de sistema en bucle cerrado (incluyendo el regulador diseñado) y comprueba mediante el comando PZF del CC que los polos BC del sistema están en los puntos elegidos. Representa la respuesta temporal del sistema completo ante entrada en escalón indicando sobre ella el cumplimiento de las especificaciones dinámicas.
M(s) = ⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯
¿Se cumple la especificación estática?. ¿Es necesario que el regulador incluya efecto integral?. ¿Qué sucedería con las especificaciones tanto estáticas como dinámicas si se hubiera escogido el punto del plano complejo s = -.0.30 ± 0.92j en lugar del anterior? ¿ Y si elegimos -0.5+0j?. Realizar el diagrama del lugar compensado e indicarlo
Para el sistema 2)(ciónrealimenta)2(
1)( =+
= sHconss
sGP
• Trazar el lugar de las raices.. Se desea que el sistema cumpla con las especificaciones: • Tenga un sobreimpulso máximo del 10%, tiempo de posicionado o establecimiento al 98% de 4 segundos.y un error
de velocidad máxima de 0.1 %, Se pide
Diseñar el regulador necesario para cumplir las especificaciones. En que punto del lugar está situado, el polo dominante para cumplir las especificaciones dinamicas Calcular el valor de K por condición modular.

Apuntes de regulación Automática.
Prácticas y Problemas.
- 23 -
Escribe el valor de K ¿ Cumple la condición de error?. Escribe la FDT del regulador necesario. Calcula la K total del sistema compensado. Comprueba sobre el lugar si el punto sigue perteneciendo al lugar ¿ si o no?. Repite el ejercicio con ev < de 0.3 seg Comprueba que con la Kr obtenida en el apartado anterior el error de posición es demasiado grande.