TEMA 9: MODELOS MATEMTICOS PARA EL ...files.especializacion-tig.webnode.com/200000063...Curso...
47
Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009 TEMA 9. Modelos matemáticos para el posicionamiento 1. Introducción. Dependiendo del tipo de aplicación y el nivel de precisión que se quiera obtener usando el GPS, existen importantes ventajas y desventajas formando ciertas combinaciones lineales de las ecuaciones básicas de pseudodistancias y fase de la portadora. Utilizando el GPS, se puede realizar bien posicionamiento puntual o absoluto, bien posicionamiento relativo entre puntos. Debido a las incertidumbres en la posición de los satélites, el comportamiento de los relojes y los retardos en la propagación de las señales, el posicionamiento absoluto sólo alcanza precisiones próximas a algunos metros. Para la mayoría de las necesidades en aplicaciones geodésicas o geodinámicas, es necesario utilizar el GPS en posicionamiento relativo. Las fuentes de error que afectan a la señal GPS, órbitas de satélites, relojes de los satélites y receptores, errores debidos a la propagación atmosférica muestran algún tipo de correlación entre señales recibidas en varias estaciones que se encuentren recibiendo la señal de varios satélites simultáneamente. La finalidad del posicionamiento diferencial es aprovechar estas correlaciones para mejorar la precisión de las posiciones relativas. El uso de las medidas de código y de fase de la portadora para el posicionamiento relativo consiste en realizar diferencias entre dichas medidas, de forma que el efecto de varios de estos errores comunes en ambas medidas, desaparecen o se minimizan en gran medida, en el proceso de diferenciar las medidas. Las diferencias entre las medidas GPS pueden realizarse bien entre receptores, bien entre satélites comunes, entre épocas o combinando las anteriores. Vamos a ver las más comunes, diferencias entre receptores, entre satélites y entre épocas. Tema 9 - 330
Transcript of TEMA 9: MODELOS MATEMTICOS PARA EL ...files.especializacion-tig.webnode.com/200000063...Curso...

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
TEMA 9. Modelos matemáticos para el posicionamiento
1. Introducción.
Dependiendo del tipo de aplicación y el nivel de precisión que se quiera obtener usando
el GPS, existen importantes ventajas y desventajas formando ciertas combinaciones
lineales de las ecuaciones básicas de pseudodistancias y fase de la portadora.
Utilizando el GPS, se puede realizar bien posicionamiento puntual o absoluto, bien
posicionamiento relativo entre puntos. Debido a las incertidumbres en la posición de
los satélites, el comportamiento de los relojes y los retardos en la propagación de las
señales, el posicionamiento absoluto sólo alcanza precisiones próximas a algunos
metros. Para la mayoría de las necesidades en aplicaciones geodésicas o
geodinámicas, es necesario utilizar el GPS en posicionamiento relativo. Las fuentes de
error que afectan a la señal GPS, órbitas de satélites, relojes de los satélites y
receptores, errores debidos a la propagación atmosférica muestran algún tipo de
correlación entre señales recibidas en varias estaciones que se encuentren recibiendo
la señal de varios satélites simultáneamente.
La finalidad del posicionamiento diferencial es aprovechar estas correlaciones para
mejorar la precisión de las posiciones relativas. El uso de las medidas de código y de
fase de la portadora para el posicionamiento relativo consiste en realizar diferencias
entre dichas medidas, de forma que el efecto de varios de estos errores comunes en
ambas medidas, desaparecen o se minimizan en gran medida, en el proceso de
diferenciar las medidas.
Las diferencias entre las medidas GPS pueden realizarse bien entre receptores, bien
entre satélites comunes, entre épocas o combinando las anteriores. Vamos a ver las
más comunes, diferencias entre receptores, entre satélites y entre épocas.
Tema 9 - 330

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 331
2. Posicionamiento absoluto.
El posicionamiento absoluto se puede llevar a cabo utilizando los datos de
pseudodistancias obtenidas con código, con fase de la portadora o con datos Doppler.
A continuación vemos los tres casos.
2.1. Posicionamiento absoluto con medidas de código
Las pseudodistancias de código en una época determinada t puede escribirse como:
)()()( tcttR iii δρ Δ⋅+= jjj
j
j
)
donde es la medida de pseudodistancia de código entre el observador i y el
satélite j, es la distancia geométrica entre el satélite y el observador, y c es la
velocidad de la luz. El último término, , es el error combinado de los relojes del
receptor i y el satélite j.
)(tRi
jiρ )(t
)(tiδΔ
Si examinamos la ecuación anterior, las coordenadas del observador (nuestras incógnitas) se
encuentran de forma implícita en la distancia geométrica puesto que:
( ) ( ) ( 222
jjj
ZYX ,,j
)()()()( ij
ij
ijj
i ZtZYtYXtXt −+−+−=ρ
donde son las componentes del vector de posición geocéntrico
(coordenadas) del satélite en la época t y son las tres incógnitas de las
coordenadas del observador. Si consideramos el término para una época, cada
satélite contribuye con una incógnita en el estado del reloj. Si por un momento
omitimos el error en el reloj del receptor del observador, la ecuación de
pseudodistancias tiene cuatro incógnitas, las tres coordenadas del observador más el
error del reloj del satélite. Cada satélite adicional genera una ecuación más con las
mismas coordenadas del observador como incógnitas, más otra incógnita del error de
su propio reloj, de manera que siempre obtenemos más incógnitas que ecuaciones.
Incluyendo una época adicional, los nuevos errores en los relojes de los satélites se
pueden modelar con su deriva. Afortunadamente, la información de los relojes de los
)(),(),( tZtYtX
iii
)(tiδΔ

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 332
satélites son conocidos y se transmiten vía el mensaje de navegación en forma de tres
coeficientes de a0, a1 y a2 respecto a una época t0, así
2j
jj
jjj
)(t
02010 )()()( ttattaat −+−+=δ
que nos permite el cálculo del error del satélite para una época cualquiera t. Este
polinomio elimina la mayor parte del error debido al reloj del satélite, si bien una
pequeña parte siempre permanece presente.
El término del error combinado se separa en dos partes:
)()()( ttt iδδδ −=Δ
donde la parte relacionada con el satélite la consideramos ya conocida, y el término
relacionado con el receptor sigue siendo incógnita. Substituyendo la última igualdad:
)()()()( tctcttR iii δδρ −+=
Ahora las incógnitas son cuatro, las tres coordenadas del observador y el error del reloj
del receptor iδ . De manera que las incógnitas se pueden calcular de forma
inmediata si se observan cuatro satélites de forma simultánea.
Si llamamos ahora al número de satélites, al número de épocas, el producto
nos da el número de ecuaciones de observación de que se dispone. Para
obtener una única solución, el número de incógnitas no puede ser mayor que el
número de ecuaciones de observación. Si colocamos las incógnitas en el lado derecho
de la igualdad, tenem
jn n
nn ⋅
os:
jjj
nnn +≥⋅ 3
1=n 4=n
t
tj
)()()()( tcttctR iii δρδ −=−
con lo que la condición se convierte en que:
ttj
que es la condición que para una época , nos da la condición de que .
Cabe destacar que cada época puede ser considerada independientemente y la
t j

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 333
posición del observador i y los errores de los relojes para cada época pueden calcularse
si se tienen observaciones simultáneas, por lo que se puede incluir la posición del
observador i como variable, es decir, en movimiento. Este es el caso de las
aplicaciones GPS cinemáticas, en las que se buscan la posición de un móvil en una
época determinada.
En los casos de aplicaciones estáticas en las que la posición del observador i es
estática durante el periodo de observación, la situación es ligeramente diferente. La
observación simultánea de cuatro satélites como mínimo no es necesaria. Así, por
ejemplo, si consideramos tres satélites y lo aplicamos a nuestra condición:
tt 32 nn +≥⋅ ⇔ ≥ n 3t
luego la observación de dos satélites en tres épocas diferentes nos daría una solución.
En la práctica, esta situación mínima nos daría soluciones poco fiables o el cálculo
podría fallar debido a un sistema de ecuaciones de observación mal condicionado.
2.2. Posicionamiento absoluto con medidas de fase de la portadora
Como ya vimos, las pseudodistancias se pueden obtener también a partir de las
medidas de fase. El modelo matemático para estas medidas era:
)()()( tfNtt ji
jji
ji
ji δρ
λφ Δ++= 1
j
Aquí, es la fase portadora medida expresada en ciclos, )(tiφ λ es la longitud de onda,
y es la misma distancia que para el modelo de distancia código, es decir, la
distancia geométrica entre el satélite y el receptor. La ambigüedad fase, ,
independiente del tiempo es un número entero y, por lo tanto, a menudo es llamado
ambigüedad entera o incógnita entera. El término denota la frecuencia de la señal
del satélite en ciclos por segundo, y es el sesgo del receptor del reloj y el
satélite combinado, que si lo sustituimos en la ecuación, queda:
)(tj
j
j
j
iρ
iN
f
)(tiδΔ
)()()()( tftfNtt ijjjj
ij
ij
i δδρλ
φ −++= 1

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 334
ecuación en la que se vuelve a suponer conocido el error en el reloj del satélite. Así,
para satélites, épocas y un observador i, tenemos otra vez posibles
medidas (ecuaciones). Teniendo en cuenta que la ambigüedad entera es una incógnita
para cada satélite, la condición para que se obtenga una única solución se transforma
ahora en:
jn n nn ⋅
nnnn ++≥⋅ 3
1=n
2=n 5=n
3≥
••
j
•
•
t tj
tjtj
de manera que para una sóla época , sólo existe solución si se omite el número
de ambigüedades, lo que nos llevaría al caso del modelo de pseudodistancias a partir
del código y por lo tanto el número mínimo de satélites sería 4. Este caso significa que
el modelo de posicionamiento absoluto mediante medidas de fase de la portadora se
puede usar para aplicaciones cinemáticas siempre y cuando las ambigüedades se
hayan resuelto con observaciones iniciales (de forma estática). Cuando las
ambigüedades tienen que ser resueltas, el número mínimo de satélites a observar es
, lo que nos lleva a un número mínimo de , si bien un número de 4
satélites nos da un resultado razonable y es una situación normal debido a la
configuración de los satélites y en este caso, el número mínimo de épocas a observar
sería .
t
j
n
t
t
2.3. Posicionamiento absoluto con medidas Doppler
Vimos también que las pseudodistancias se pueden obtener también a partir de las
medidas de datos Doppler. El modelo matemático para estas medidas era:
)()()( tcttD ji
ji
ji Δ⋅+= δρ
Esta ecuación se puede considerar como una derivada respecto al tiempo de la
pseudodistancia de código o de fase de la portadora. En ella, es el
desplazamiento Doppler observado, es la velocidad radial instantánea entre el
satélite y el receptor, y es la derivada respecto al tiempo del error combinado
de los relojes del satélite y el receptor.
)(tDi
)(tjiρ
)(tjiΔδ

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 335
La velocidad radial para un receptor estacionario se escribe como:
)()(
)()( t
t
tt j
ij
i
ij
iji
•
•
•
⋅−
−= ρ
ρρ
ρρρ•
y relaciona la posición incógnita del receptor con la posición y velocidad instantánea
del satélite. Éstos últimos se pueden calcular a partir de las efemérides de los satélites
obtenidas del mensaje de navegación.
La contribución del error del satélite al término se puede obtener derivando el
modelo lineal para el error en el estado del reloj que vimos en el posicionamiento
absoluto con medidas de código, así:
)(tjiΔδ•
•
)(2)( 021 ttaatj −+=δ
de manera que lo podemos considerar conocido. De esta manera, la ecuación del
modelo contiene cuatro incógnitas, las coordenadas del observador, iρ•
y la derivada
con el tiempo del error del reloj del observador . Por lo tanto, si comparamos el
modelo de pseudodistancias mediante medida de código con el Doppler, éste último
sólo contiene la variación del error del reloj del receptor en vez del propio error.
)(tiδ
3. Posicionamiento relativo.
El objetivo del posicionamiento relativo es determinar la coordenadas de un punto
desconocido con respecto a otro de coordenadas conocidas, es decir, permite la
determinación del vector entre dos puntos, normalmente llamado baselínea.
Supongamos un punto de referencia A de coordenadas conocidas, un punto B de
coordenadas desconocidas y el vector baselínea ABb . Denotemos además sus
correspondientes vectores de posición AX y BX de forma que se puede escribir:

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 336
ABAB bXX +=
siendo las componentes del vector baselínea:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
Δ
Δ
Δ
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
−
=
AB
AB
AB
AB
AB
AB
AB
Z
Y
X
ZZ
YY
XX
b
Los modelos matemáticos para el código y la fase de la portadora que ya hemos visto
se pueden aplicar de forma análoga con la única diferencia de que ahora existen las
coordenadas conocidas del punto de referencia.
El posicionamiento relativo es mas efectivo cuando se realizan observaciones
simultáneas entre el punto de referencia de coordenadas conocidas y el punto a
calcular. La observación simultánea en los puntos A y B a los satélites j y k nos va a
permitir generar lo que se viene llamando simples diferencias, dobles diferencias y
triples diferencias.
3.1. Diferencias de fase
Vamos a ver los modelos matemáticos para el posicionamiento relativo que se pueden
obtener por medio de la combinación de las ecuaciones de observación para el
posicionamiento absoluto.
− Simples diferencias:
Vamos a suponer que tenemos dos puntos observando a un mismo satélite. Llamemos
a los puntos A y B y al satélite j.

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 337
Podemos escribir para cada observador su ecuación de observación para la fase, así:
)()()()( tfNttft Ajj
AjA
jjjA δρ
λδ −+=−Φ 1
)()()()( tfNttft Bjj
Bj
Bjjj
B δρλ
δ −+=−Φ 1
y la diferencia de ambas ecuaciones nos da:
[ ] [ ] [ ])()()()()()( ttfNNtttt ABjj
Aj
BjA
jB
jA
jB δδρρ
λ−−−+−=Φ−Φ 1
jjj
jjj
jjj
jjj
que nos da la ecuación de simples diferencias. Si nos fijamos en las incógnitas del lado
derecho de la igualdad, existe un problema respecto a la obtención de la solución. Al
tener las ambigüedades y los errores de los relojes los mismos coeficientes, obtenemos
una matriz deficiente de rango pues existen columnas con los mismos valores (nos
lleva a un determinante nulo y por lo tanto matriz no invertible). Para evitar este
problema, se incluyen ahora las cantidades relativas:
ABAB NNN −=
)()()( ttt ABAB δδδ −=
y para el resto de la ecuación utilizamos la notación:
)()()( ttt ABAB Φ−Φ=Φ
)()()( ttt ABAB ρρρ −=

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 338
de forma que la ecuación de simples diferencias queda como:
)()()( tfNtt ABjj
ABjAB
jAB δρ
λ−+=Φ 1
Si nos fijamos en la ecuación, los errores del reloj del satélite han desaparecido. Las
simples diferencias entre receptores eliminan o reducen los efectos asociados con los
satélites como son los errores de los relojes y gran parte de los errores orbitales
siempre que el vector entre los puntos sea menor que la distancia geocéntrica del
satélite.
La ecuación de simples diferencias se puede formar también considerando un solo
punto A y dos satélites j y k, lo que nos llevaría a la ecuación:
)()()( tfNtt jkjjkA
jkA
jkA δρ
λ−+=Φ 1
en la que hemos supuesto que las frecuencias de ambos satélites son iguales. La
ventaja de este modelo es que se elimina el error del reloj del observador, si bien,
como estamos hablando de posicionamiento relativo entre dos puntos, no tiene mucho
sentido.
− Dobles diferencias:
Si ahora suponemos dos puntos A y B y dos satélites j y k, podemos formar dos
simples diferencias, bien entre dos receptores, bien entre dos satélites si bien la
ecuación de dobles diferencias que obtendríamos sería la misma.

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 339
Supongamos entonces dos simples diferencias entres dos puntos y a dos satélites.
)()()( tfNtt ABjj
ABjAB
jAB δρ
λ−+=Φ 1
)()()( tfNtt ABkk
ABkAB
kAB δρ
λ−+=Φ 1
kj
y para obtener la doble diferencia, las restamos. Si suponemos que las frecuencias de
los satélites son iguales obtenemos: ff =
[ ] [ jAB
kAB
jAB
kAB
jAB
kAB NNtttt −+−=Φ−Φ )()()()( ρρ
λ]1
y usando una notación análoga al caso de las simples diferencias obtenemos la forma
final de la ecuación de dobles diferencias:
jkAB
jkAB
jkAB Ntt +=Φ )()( ρ
λ1
Si nos fijamos en la ecuación, el error del reloj del receptor se ha cancelado, y esta es
la principal razón de que se usen las dobles diferencias. La eliminación de este error en
el reloj del receptor es consecuencia de las hipótesis de simultaneidad en la
observación y la igualdad en la frecuencia de las señales de los satélites.
La notación que hemos usado:

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 340
jkjk
∗ Φ
ABABAB ∗−∗=∗
en la que podemos sustituir por , ρ o . Hay que tener en cuenta que los
términos que hemos utilizado como notación, comprenden cuatro términos, así:
N
jkjkjkjk
jkjkjk
jkjkjk
jkjkjk
AABBABABAB ∗+∗−∗−∗=∗−∗=∗
y por lo tanto, los términos desarrollados quedan como:
)()()()()( ttttt AABBAB Φ+Φ−Φ−Φ=Φ
)()()()()( ttttt AABBAB ρρρρρ +−−=
AABBAB NNNNN +−−=
− Triples diferencias:
Hasta ahora sólo hemos considerado una época t. Si recordamos, las ambigüedades
son constantes y por lo tanto independientes del tiempo.
Consideremos entonces dos épocas t1 y t2 y sus correspondientes dobles diferencias:
jkAB
jkAB
jkAB Ntt +=Φ )()( 11 ρ
λ1

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 341
jkAB
jkAB
jkAB Ntt +=Φ )()( 22 ρ
λ1
y las restamos obteniendo:
[ ])()()()( 1212 tttt jkAB
jkAB
jkAB
jkAB ρρ
λ−=Φ−Φ 1
que podemos escribir de forma simplificada como:
)()( 1212 tt jkAB
jkAB ρ
λ=Φ 1
que es la ecuación de triples diferencias en la que hemos usado la notación:
)()()( ttt ∗−∗=∗
jkjkjk
jkjkjk
1212
de forma que los términos de la ecuación de triples diferencias estén formados por
ocho términos:
)()()()()()()()()(
1111
222212
tttt
tttttjA
kA
jB
kB
AABBAB
Φ+Φ−Φ−Φ−
−Φ+Φ−Φ−Φ=Φ
y
)()()()(
)()()()()(
1111
222212
tttt
tttttjA
kA
jB
kB
AABBAB
ρρρρρρρρρ
+−−−
−+−−=
Las dos principales ventajas de las triples diferencias es que el efecto de las
ambigüedades desaparece y por lo tanto son independientes de los cambios en el valor
de las ambigüedades, es decir, de las pérdidas de ciclo.
3.2. Correlación de las combinaciones de fase
En general hay dos tipos de correlación:
− La correlación física y

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 342
− La correlación matemática.
La correlación física se debe a que la señal que emite un satélite se recibe en varias
estaciones al mismo tiempo, o bien que la misma señal emitida por un satélite se
recibe en varios puntos. Normalmente no se tiene en cuenta si se calcula en modo de
baselíneas aisladas, pero si se tiene en cuenta si el cálculo se realiza en modo
multibaselínea o multiestación. Sin embargo, se han obtenido excelentes resultados
aún obviando esta correlación.
Vamos a estudiar la correlación matemática considerando que los errores de fase
presentan una distribución Normal de media 0 y varianza , N(0, ) y que las
fases medidas son linealmente independientes o incorreladas. Sea
2 2σ σ
Φ el vector que
contiene las fases medidas y
( ) I⋅=Φcov σ 2
siendo I la matriz de varianzas-covarianzas para las fases ( I es la matriz identidad al
ser las fases incorreladas).
− Correlación de las Simples Diferencias
Haciendo las simples diferencias para dos puntos estación A y B, un satélite j, en una
época t tenemos la simple diferencia:
)()()( ttt ABAB Φ−Φ=Φ jjj
kkk
Formando otra simple diferencia para otro satélite k: )()()( ttt ABAB Φ−Φ=Φ
y ambas simples diferencias se pueden expresar mediante la notación matricial:
Φ⋅= CSD
siendo:

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 343
⎥⎥⎦
⎤
⎢⎢⎣
⎡
Φ
Φ=
)(
)(
t
tSD
kAB
ABj
⎥⎥⎦
⎤
⎢⎢⎣
⎡
−
−=
1100
0011C
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
Φ
Φ
Φ
Φ
=Φ
)(
)(
)(
)(
t
t
t
t
kB
kA
jB
Aj
de modo que si le aplicamos la ley de covarianzas a nuestra igualdad:
( ) ( ) TCCSD ⋅Φ⋅= covcov
y sustituyendo la covarianza de las fases:
( ) TT 22 CCCICSD ⋅=⋅⋅⋅=cov σσ
y sustituyendo los valores de C nos da:
( ) I C C SD T
⋅ ⋅ = ⎥ ⎥ ⎦
⎤
⎢ ⎢ ⎣
⎡ ⋅ ⋅ =
⎥ ⎥ ⎥ ⎥ ⎥
⎦
⎤
⎢ ⎢ ⎢ ⎢ ⎢
⎣
⎡
−
−
⋅ ⎥ ⎥ ⎦
⎤
⎢ ⎢ ⎣
⎡
−
− ⋅ = ⋅ = 2 22 2 2
10
012
10
10
01
01
1100
0011 cov σ σ σ σ
es decir, que la matriz es diagonal:
( ) ISD ⋅⋅= 2cov σ 2
lo que demuestra que las ecuaciones de observación de simples diferencias están
incorreladas puesto que la matriz de varianzas-covarianzas es diagonal. Este resultado
es independiente del número de simples diferencias que consideremos puesto que si
consideramos más épocas, la matriz de varianzas covarianzas sigue siendo diagonal
con una dimensión igual al número de ecuaciones que hayamos considerado
inicialmente.

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 344
− Correlación de las Dobles Diferencias
Consideremos dos puntos de observación A y B, y tres satélites j, k, l. Vamos a
considerar el satélite j como referencia para las dos dobles diferencias. Las dos dobles
diferencias que se pueden formar para una época t son:
)()()( ttt ABABAB Φ−Φ=Φ jkjk
jljl
)()()( ttt ABABAB Φ−Φ=Φ
que escritas como antes en forma matricial:
SDCDD ⋅=
donde:
⎥⎥⎦
⎤
⎢⎢⎣
⎡
Φ
Φ=
)(
)(
t
tDD
jlAB
ABjk
⎥⎥⎦
⎤
⎢⎢⎣
⎡−=
101
011C
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
Φ
Φ
Φ
=
)(
)(
)(
t
t
t
SDlAB
kAB
ABj
La matriz de varianzas-covarianzas para las dobles diferencias es:
( ) ( ) TCSDCDD ⋅⋅= covcov
si sustituimos la matriz de covarianzas que hemos obtenido para las simples
diferencias:
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡⋅⋅=⋅⋅⋅=
21
1222cov 22 σσ
TCCDD

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 345
lo que demuestra que las dobles diferencias están correladas. El peso de la matriz de
correlación )(tP se obtiene como la matriz inversa de la de covarianzas:
( )[ ]⎥⎥⎦
⎤
⎢⎢⎣
⎡
−
−==
−
21
1231
21cov)( 2
1
σDDtP
En general, cuando hacemos dobles diferencias para una época t, la matriz de
covarianzas es una matriz de tamaño de la forma:
Dn
DD xnn
( )⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
=
211
121
112
.2cov 2σDD
y la matriz de pesos:
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
−−
−−
−−
+=
D
D
D
D
n
n
n
ntP
11
11
11
11
.21)( 2σ
− Correlación de las Triples Diferencias
Consideramos dos puntos de observación A y B, tres satélites j, k, l en dos épocas de
observación t1 y t2. Tomando el satélite j como referencia, formamos las dos triples
diferencias:
)()()()()( 112212 ttttt ABABABABAB Φ+Φ−Φ−Φ=Φ jkjkjk
jljljl
)()()()()( 112212 ttttt ABABABABAB Φ+Φ−Φ−Φ=Φ
que escritas en forma matricial como antes queda:

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 346
SDCTD ⋅=
donde:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
Φ
Φ=
)(
)(
12
12
t
tTD
jlAB
ABjk
⎟⎟⎠
⎞⎜⎜⎝
⎛
−−
−−=
101101
011011C
⎟⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
Φ
Φ
Φ
Φ
Φ
Φ
=
)(
)(
)(
)(
)(
)(
2
2
2
1
1
1
t
t
t
t
t
t
SD
lAB
kAB
jAB
lAB
kAB
ABj
La matriz de varianzas-covarianzas para las triples diferencias es:
( ) ( ) TCSDCTD ⋅⋅= covcov
si sustituimos la matriz de covarianzas que hemos obtenido para las simples
diferencias:
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡⋅⋅=⋅⋅⋅=
42
2422cov 22 σσ
TCCDD
por lo que las triples diferencias están más correladas entre si que las dobles
diferencias. De forma análoga, la matriz de pesos se obtiene como inversa de la de
covarianzas:
⎟⎟⎠
⎞⎜⎜⎝
⎛
−
−== −
42
24121
.21)][cov()( 2
1
σTDtP

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 347
4. Cálculo completo de una posición mediante código. Introducción al cálculo de una posición con fase. Ambigüedades flotantes y fija
4.2. Modelo de Pseudoistancias con Código
Partimos de ecuaciones de observación para medidas de GPS no lineales. El código de
la seudodistancia en una época t puede ser modelado por
)()()( tcttR iii δρ Δ+= jjj
j
j
j
j
Aquí, es el código pseudodistancia medida entre el lugar de observación i y el
satélite j, es la distancia geométrica entre el satélite y el punto de observación,
y c es la velocidad de la luz. El ultimo elemento , es el sesgo del reloj que
representa el desfase del reloj combinado del satélite y el receptor del reloj con
respecto al tiempo GPS.
)(tRi
ρ )(ti
)(tiδΔ
Examinando la ecuación, las coordenadas del punto deseado para ser determinado son
implícitamente la distancia , que puede ser escrita explícitamente como )(tiρ
222 ))(())(())(()( i
ji
ji
jji ZtZYtYXtXt −+−+−=ρ
donde , , son los componentes de la posición vector geocéntrico del
satélite en la época t, y ,Yi , son los tres incógnitas ECEF coordenadas del lugar
observando. Ahora, el sesgo reloj debe ser resuelto.
)(tX j j j
Zij
)(tY )(tZ
IX
)(tiδΔ
Por el momento consideramos una época simple; automáticamente es aplicada una
posición simple i. Cada satélite contribuye a una incógnita del sesgo del reloj que
puede ser reconocido por el superíndice j en el término reloj.
Olvidando, de momento, el sesgo del reloj del sitio i, la ecuación pseudodistancia para
el primer satélite debería tener cuatro incógnitas. Las tres coordenadas del punto y

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 348
una del sesgo del reloj de este satélite. Por lo tanto, hay más incógnitas que medidas.
Incluso, cuando una época adicional es considerada, nuevos sesgos del reloj del
satélite deben ser modelados debido a la fluctuación del reloj. Afortunadamente, la
información del reloj del satélite es conocida y transmitida por medio de la transmisión
del mensaje de navegación en la forma de tres coeficientes polinomiales a con
el tiempo de referencia t . Por lo tanto la ecuación
210 ,, aa
2j
jj
jjj
c
210 )()()( cc ttattaat −+−+=δ
realiza el cálculo del sesgo del satélite en la época t. Podemos observar que el
polinomio anterior elimina una gran cantidad del sesgo del reloj del satélite, sin
embargo permanece todavía una pequeña cantidad de errores.
El término del sesgo combinado es separado en dos partes por
)()()( ttt iδδδ −=Δ
donde la parte relacionada con el satélite es conocida por la ecuación polinómica arriba
citada y el término relacionado con el receptor sigue siendo incógnita. Substituyendo la
ecuación y cambiando el sesgo del reloj del satélite al lado izquierdo de la ecuación
queda:
)()()()( tcttctR iii δρδ −=−
Como podemos ver el lado izquierdo de la ecuación contiene las cantidades observadas
o conocidas, mientras que el lado derecho son las incógnitas.
4.3. Modelos en dobles diferencias
Los modelos de posicionamiento empleados anteriormente, tienen un término incógnita
ρ que no es lineal. En esta sección linealizaremos . La ecuación de
peudodistancias es
)(tjiρ

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
),())(())(())(()(
,
222
iii
ij
ij
ijj
i
ZYXfZtZYtYXtXt
≡−+−+−=ρ
en la que las incógnitas del punto de coordenadas tienen una forma no
lineal. Si asumimos como los valores aproximados para las incógnitas, la
distancia aproximada puede ser calculada
iii ZYX ,,
00,0 , iii ZYX
)(0 tjiρ
),())(())(())(()(
00,0
20
20
200
iii
ij
ij
ijj
i
ZYXfZtZYtYXtXt
≡−+−+−=ρ
Utilizando valores aproximados, las incógnitas se pueden descomponer
mediante
iii ZYX ,,
iii
iii
iii
ZZZYYY
XXX
Δ+=Δ+=
Δ+=
0
0
0
donde son ahora las incógnitas. Las incógnitas han sido separadas en
dos partes, la parte conocida representado or y la parte de las
incógnitas .
iii ZYX ΔΔΔ ,,
ii YX ΔΔΔ ,,
),( 00,0 iii ZYX
iZ
Si aplicamos las serie de Taylor respecto al punto aproximado, nos queda:
ii
iiii
i
iii
ii
iiiiii
iiiiiiiii
ZZ
ZYXfY
YZYXf
XX
ZYXfZYXf
ZZYYXXfZYXf
Δ∂
∂+Δ
∂∂
+Δ∂
∂+=
Δ+Δ+Δ+≡ΔΔΔ
0
000
0
000
0
000000
000
),,(),,(
),,(),,(
),,(),,(
Las derivadas parciales son obtenidas a partir de
Tema 9 - 349

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 350
)()(),,(
)()(),,(
)()(),,(
0
0
0
000
0
0
0
000
0
0
0
000
tZtZ
ZZYXf
tYtY
YZYXf
tXtX
XZYXf
ji
ij
i
iii
ji
ij
i
iii
ji
ij
i
iii
ρ
ρ
ρ
−−=
∂∂
−−=
∂∂
−−=
∂∂
Y son los componentes del vector unitario de posicionamiento del satélite hacia
el lugar aproximado. La expresión de una pseudodistancia linealizada queda como
sigue:
iji
ij
iji
ij
iji
ij
ji
ji
ZtZtZ
YtYtY
XtXtX
t
Δ−
−
Δ−
−Δ−
−=
)()(
)()(
)()(
)(
0
0
0
0
0
00
ρ
ρρρρ
donde se ha utilizado la equivalencia de de la ecuación de . Esta
ecuación es ahora lineal con respecto a las incógnitas .
),( , iii ZYXf )(0 tjiρ
iii ZYX ΔΔΔ ,,
4.3. Modelo Lineal para el Posicionamiento Relativo
Para el modelo lineal del posicionamiento relativo, la investigación se restringe al uso
de las mediciones por fase. Además la linealización y comienzo de las ecuaciones
lineales se mantiene, en principio, el mismo número de fases y combinaciones de fases
y podrá ser representado análogamente para cada modelo.
El modelo para las ecuaciones de dobles diferencias, multiplicado por λ es:
jkjkjkABABAB Ntt λρλφ += )()(

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 351
donde el término que contiene la geometría de la época está compuesto de la
siguiente forma:
)(tABρ jk
jkjkjk )()()()()( ttttt AABBAB ρρρρρ +−−=
la cual refleja cuatro mediciones por dobles diferencias
iji
iij
i
iij
i
iji
ji Z
tZtZ
YtYtY
XtXtX
t Δ−
−Δ−
−Δ−
−=)(
)()(
)()(
)()(
0
0
0
0
0
00 ρρρ
ρρjjj
donde resulta la siguiente expresión
BjB
Bj
BjB
Bj
BjB
Bj
jB
BKB
BK
BKB
BBK
B
BKB
jkAB
ZtZtZ
YtYtY
XtXtX
t
ZtZtZ
YtYtY
XtXtX
t
Δ−
+
Δ−
+Δ−
−−
Δ−
−
Δ−
−Δ−
−=
)()(
)()(
)()(
)(
)()(
)()(
)()(
)(
0
0
0
0
0
00
0
0
0
0
0
00
ρ
ρρρ
ρ
ρρρρ
KK
AjA
Aj
AjA
Aj
AjA
Aj
jA
AKA
AK
AKA
AAK
A
AKA
ZtZtZ
YtYtY
XtXtX
t
ZtZtZ
YtYtY
XtXtX
t
Δ−
−
Δ−
−Δ−
−+
Δ−
+
Δ−
+Δ−
+−
)()(
)()(
)()(
)(
)()(
)()(
)()(
)(
0
0
0
0
0
00
0
0
0
0
0
00
ρ
ρρρ
ρ
ρρρ
KK
(5.9)

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 352
donde son las coordenadas aproximadas de B y es la
pseudodistancia calculada del satélite j. Además, se supone conocidas las coordenadas
de A y el satélite k que es elegido como referencia.
00,0 , BBB ZYX jB0ρ
Substituyendo la ecuación (5.9) en (5.7) y reordenando nos lleva a la ecuación de
observación lineal
jkABB
jkZA
jkYA
jkX
AZAYAXAB
NZtaYtaXta
ZtaYtaXtatl
BBB
AAA
λ+Δ+Δ+Δ+
Δ+Δ+Δ=
)()()(
)()()()( jkjkjkjk
Jkjkjkjk
(5.10)
donde el lado izquierdo es
)()()()()()( 0000 ttttttl AABBABAB ρρρρλφ −++−= (5.11)
comprende todas las mediciones y todos los términos calculados de los valores
aproximados. Las abreviaturas de la parte derecha de la ecuación corresponden a
)()(
)()()(
)()(
)()()(
)()(
)()()(
)()(
)()()(
)()(
)()()(
)()(
)()()(
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
tZtZ
tZtZta
tYtY
tYtYta
tXtX
tXtXta
tZtZ
tZtZta
tYtY
tYtYta
tXtX
tXtXta
jB
Bj
KB
BK
jkZ
jB
Bj
KB
BK
jkY
jB
Bj
KB
BK
jkX
jA
Aj
KA
BK
jkZ
jA
Aj
KA
BK
jkY
jA
AKA
AjkX
B
B
B
A
A
A
ρρ
ρρ
ρρ
ρρ
ρρ
ρρ
−+−−=
−+−−=
−+−−=
−−−=
−−−=
−−−=jK
(5.12)

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 353
Observamos que las coordenadas del punto A deben ser conocidas para el
posicionamiento relativo. Especificamente, el punto conocido A reduce tres incógnitas
debido a que . Esto produce un ligero cambio en el lado
izquierdo del término de la ecuación
0=Δ=Δ=Δ AAA ZYX
)()()()()()( 00 ttttttl AABBABAB ρρρρλφ −++−= Jkjkjkjk
(5.13)
La ecuación (5.10) configurará la matriz de diseño A, de la forma Ax-k=R en el modelo
de mínimos cuadrados.
Asumiendo ahora cuatro satélites y dos épocas el sistema de matrices es el siguiente:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣
⎡
=
) (
) (
) (
) (
) (
) (
2
2
2
1
1
1
t l
t l
t l
t l
t l
t l
l
jm AB
jl AB
jk AB
jm AB
jl AB
jk AB
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
ΔΔΔ
=
jmAB
jlAB
jkAB
B
B
B
N
N
N
XXX
x
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
λλ
λλ
λλ
00)()()(
00)()()(
00)()()(
00)()()(
00)()()(
00)()()(
111
111
111
111
111
111
tatata
tatata
tatata
tatata
tatata
tatata
A
jmZB
jmYB
jmXB
jlXB
jlXB
jlXB
jkZB
jkYB
jkXB
jmZB
jmYB
jmXB
jlZB
jlYB
jlXB
jkZB
jkYB
jkXB

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 354
El sistema de ecuaciones queda de esta forma
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
ΔΔΔ
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
)()()()()()(
00)()()(
00)()()(
00)()()(
00)()()(00)()()(
00)()()(
2
2
2
1
1
1
111
111
111
111
111
111
tltltltltltl
N
N
N
XXX
tatata
tatata
tatata
tatata
tatata
tatata
jmAB
jlAB
jkAB
jmAB
jlAB
jkAB
jmAB
jlAB
jkAB
B
B
B
jmZB
jmYB
jmXB
jlXB
jlXB
jlXB
jkZB
jkYB
jkXB
jmZB
jmYB
jmXB
jlZB
jlYB
jlXB
ZBYBXB
λλ
λλ
λλjkjkjk
T
TT −1
1−
jjj
jjj
Planteamiento de la matriz de pesos
El principio del ajuste mínimo necesita de una matriz de pesos P para la
solución. Como la solución por mínimos cuadrados es , siendo la
matriz de covarianza .
=Pnn
2= Poσ
xPKAPAA =)(
Σ
La matriz de pesos generalmente es diagonal, sien embargo en las dobles diferencias,
la matriz varianza se deduce de la ley de propagación de varianzas-covarianzas.
Si tenemos tres puntos A, B, C, un satélite j, y se considera una época simple t, se
pueden definir dos líneas base independientes. Si elegimos A como referencia, las dos
simples diferencias para las líneas bases A-B y A-C
)()()( ttt ABAB φφφ −= (5.15)
)()()( ttt ACAC φφφ −=
pueden ser fijadas para un satélite en una época t. Escribiremos esta ecuación de
forma matricial, introduciendo el vector SD para las simples diferencias, el vector φ
para las fases, y una matriz C

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 355
⎥⎦
⎤⎢⎣
⎡=
)()(
tt
SD jAC
jAB
φφ
; ; (5.16) ⎥⎦
⎤⎢⎣
⎡−−
=101011
C⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=)()()(
ttt
jC
jB
A
φφφ
φ
j
j
Así, nos queda
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎦
⎤⎢⎣
⎡−−
=⎥⎦
⎤⎢⎣
⎡
)()()(
101011
)()(
ttt
tt
jC
jB
A
jAC
jAB
φφφ
φφ
(5.17)
Para encontrar la correlación, aplicaremos la ley de propagación a esta relación
SD=Cφ , dandonos la siguiente expresión SDΣ =C CT. Sabemos que la varianza a
priori, que resulta de la experimentación más empírica es , luego
tenemos que
φΣ
22
T2
2
)1( cmo =σ
(5.18) SD CCσ=Σ
debido a que . Sustituyendo la matriz C de la ecuación (5.16) y calculando
el producto de matrices nos da
ISD σ=Σ
(5.19) ⎥⎦
⎤⎢⎣
⎡=Σ
21122σSD
lo que muestra, como era de esperar, las simples diferencias de dos líneas bases con
un punto en común están correladas. Sin embargo, recordamos que las simples
diferencias de una sola línea base son no correladas.
A continuación, explicaremos la correlación para las dobles diferencias. Asumimos dos
puntos A y B, y 4 satélites j, k, l y m.

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 356
)()()()()(
)()()()()(
)()()()()(
ttttt
ttttt
ttttt
jA
mA
jB
mB
jmAB
jA
LA
jB
LB
jLAB
AABBAB
φφφφφφφφφφφφφφφ
+−−=
+−−=
+−−= jkjkjk
T
T2
T
(5.20)
Ahora nos queda la matriz C
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=100110010101010100110011
C
(5.21)
La matriz de Pesos P se obtiene de la matriz inversa de la covarianza Σ , donde
ahora la matriz varianza es . Sustituyendo en esta expresión nos queda
.
DD
SDDD CCΣ=Σ
DD CC2σ=Σ
La matrizCC resultante para nuestro caso es la siguiente
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
422242224
TCC
(5.22)
y la matriz covarianza nos queda (5.23)
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡==Σ
422242224
22 22 σσ TDD CC
La matriz de pesos P
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=Σ= −
311131113
41
21)( 2
1
σSDtP (5.24)
La expresión general para la matriz de pesos P

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 357
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−
−−−
+=
DD
DD
DD
DD
DD
n
nn
n
ntP
......111
...111
11
21)( 2σ
(5.25)
Para varias épocas t1, t2,..., tn la matriz correlación se convierte en una matriz bloque
diagonal.
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
)(
)()(
)(
)( 3
2
1
ntP
tPtP
tP
tP
Luego, no es posible resolver el sistema mediante mínimos cuadrados, ya que la matriz
de pesos no es diagonal y la resolución del ajuste mínimos cuadrados supone no
correlados los observables. La solución es decorrelar la matriz para formar de nuevo el
sistema.
La solución consiste en la búsqueda de una matriz T, tal que se cumpla que
A’=TA
(A’)TA’=ATTTTA=ATPA (5.26)
con lo que TT
1−
T debe ser la matriz de pesos, es decir la inversa de la matriz covarianza,
=Σ P .
Ahora, descomponemos la matriz mediante la descomposición de Cholesky, si
R=chol(w) entonces R TR=w, siendo R una matriz triangular superior.
Σ
R=chol(Σ )
R TR= P=Σ−1 (5.27)

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 358
Si llamamos la matriz de transformación T a R , entonces las matrices A’=TA y k’=Tk,
y el sistema de ecuaciones sería A’x-k’=R’ de matriz de pesos diagonal e igual a la
unidad I, que es equivalente al sistema anterior.
(A’)TA’x=(A’)Tk’ (5.28)
desarrollando:
(TA) TTAx=(TA) TTk
ATTTTAx=ATT
TT −1 T
TTk (5.29)
A TPAx= A TPk
Estas son las ecuaciones normales decorreladas cuya solución es
, y quedando los términos , xPKAPAA =)( PAA PKAT y x invariables.
Luego, resulta idéntico resolver el primer sistema o este otro sistema.
Formación del sistema de ecuaciones normales
Sea el ejemplo siguiente donde queremos ajustar un plano a una nube de puntos.
Donde tenemos los siguientes datos:
Observables: x1,x2,x3,x4
Y1,y2,y3,y4
Incógnitas: a,b,c
Modelo Matemático: y=ax+by+c
Ecuaciones:
Y1=ax1+by1+c
Y2=ax2+by2+c
Y3=ax3+by3+c
Y4=ax4+by4+c

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 359
Siendo las matrices A , las siguientes: k
TT −1
T
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
44
33
22
11
yxyxyxyx
A
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−−
=
cycycycy
k
4
3
2
1
Realizaremos el ajuste por mínimos cuadrados donde conocemos que la solución viene
expresada de este modo , donde la matriz de pesos P la
consideramos como la matriz unidad I. Y recordando la Teoría de los corchetes de
Gauss, la matriz nos queda de la siguiente forma:
xPKAPAA =)(
AA
⎥⎦
⎤⎢⎣
⎡++++++++++++
==4433221144332211
44332211443322111 yyyyyyyyyxyxyxyx
yxyxyxyxxxxxxxxxAAA T
(5.30)
Identicamente para KAT
A A
.
(5.31) ⎥⎦
⎤⎢⎣
⎡++++++
=44332211
44332211
kykykykykxkxkxkx
kAT
Si ahora añadimos dos puntos más, bastaría hacer una nueva matriz solo con las
nuevas ecuaciones de los nuevos puntos observados 5 y 6, y como resultado
obtendriamos una matriz como la suma de la matriz anteriormente formada y la
nueva matriz.
2 1
(5.32) ⎥⎦
⎤⎢⎣
⎡++++
+=66556655
6655665512 yyyyyxyx
yxyxxxxxAA
4.4. Resumen de Actuación para la Inserción de Mediciones GPS
Para añadir nuevas épocas GPS utilizaremos este método.

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 360
1. Calcular las matrices A y k según (5.14)
2. Plantear la matriz de pesos según (5.23)
3. Decorrelar el sistema de ecuaciones con el método de Cholesky (5.27)
4. Formar la matriz PAAT , PKAT para la primera época
5. Ir formando las sucesivas épocas tT PAA )( , t
T PKA )(
6. La matriz final será ( )1PAAT +...+ nT PAA )( para n épocas
7. Resolver y
1−
1)(
=⎟⎠
⎞⎜⎝
⎛∑n
ii
T PAA ∑=
n
ii
T kA1
)(
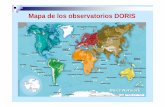
4.5. Notas importantes en observaciones de corto y largo periodo
Utilizando el método de fijado de ambigüedades LAMBDA se sacan las siguientes
conclusiones: en periodos cortos el grado de correlación es mayor, ya que tenemos
menos observaciones y por lo tanto menos ecuaciones, tal como cabía esperar de la
teoría geodésica y las ambigüedades float están lejos de los valores de las
ambigüedades enteras fijadas.

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Figura 8.1 Resultados del programa de Resolución de Ambigüedades de Dobles
Diferencias por el Método LAMBDA para observaciones en un tiempo corto.
Tema 9 - 361

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
En el segundo ejemplo correspondiente a un periodo largo de observación de 39
minutos correspondiente a 2340 épocas y 5 satélites se han resuelto 9360 ecuaciones
en un tiempo de cálculo de 340 segundos. (Pentium III 800MHz). A continuación se
muestra en la figura siguiente.
Figura 8.2.Resultados del programa de Resolución de Dobles Diferencias por el Método
LAMBDA para observaciones en un tiempo largo.
Si comparamos esta observación larga con la anterior observación corta comprobamos
que en periodos largos de observación el grado de correlación es menor, puesto hemos
observado muchas más observaciones y por lo tanto, el tiempo de cálculo es mayor.
Además, las ambigüedades float tienen valores muy cercanos a las ambigüedades
enteras.
Cuando tenemos tiempos de observaciones cortos, de hecho tenemos . Esto
explica porque los satélites GPS tienen órbitas a una gran altura, sus posiciones
relativas con respecto a los receptores cambian lentamente, lo que implica que en
tiempos de observaciones cortos, las ambigüedades si son tratadas como números
reales son de mala calidad para la distinción de las coordenadas de la línea base. Y
bb QQ ˆ<<
Tema 9 - 362

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
como resultado, la lineal base estimada será bastante mala. Sin embargo, cuando
resolvemos ambigüedades de valores enteros, los observables fase de alta precisión
empezarán a actuar como si fueran observables de pseudodistancias de alta precisión.
Como resultado, las coordenadas de la línea base se convierten estimables con una
alta precisión comparable y se cumple . bb QQ ˆ<<
Tema 9 - 363

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
4.6. Ejemplo de cálculo
Práctica sobre posicionamiento con código C/A
RINEX de OBSERVACIÓN 2 OBSERVATION DATA G (GPS) RINEX VERSION / TYPE TerraSat GeoGenius GPS+GLONASS Decoder 11-Aug-00 12:02:32 PGM / RUN BY / DATE IGN2 MARKER NAME OBSERVER / AGENCY Unknown Ashtech RD00 REC # / TYPE / VERS 13 LEAP SECONDS COMMENT 3600 LOCAL TIME OFFSET IN SEC COMMENT Default ANT # / TYPE 4851139.7520 -314513.8190 4116284.9980 APPROX POSITION XYZ 0.0000 0.0000 0.0000 ANTENNA: DELTA H/E/N 1 1 0 WAVELENGTH FACT L1/2 7 C1 P1 P2 L1 L2 D1 D2 # / TYPES OF OBSERV 15 INTERVAL 2000 8 11 0 0 0.000000 GPS TIME OF FIRST OBS 2000 8 11 0 59 45.000000 GPS TIME OF LAST OBS 8 # OF SATELLITES G05 240 240 240 240 240 240 240 PRN / # OF OBS G06 240 240 240 240 240 240 240 PRN / # OF OBS G17 171 171 171 171 171 171 171 PRN / # OF OBS G22 65 65 65 65 65 65 65 PRN / # OF OBS G24 194 194 194 194 194 194 194 PRN / # OF OBS G25 240 240 240 240 240 240 240 PRN / # OF OBS G29 235 235 235 235 235 235 235 PRN / # OF OBS G30 240 240 240 240 240 240 240 PRN / # OF OBS END OF HEADER 0 8 11 0 0 0.0000000 0 6G30G29G06G25G24G05 20659421.934 20659422.566 20659427.103 -20509640.46707 -15709887.24307 -657.502 -512.339 22593311.156 22593311.253 22593318.543 -8380699.32806 -6495059.46406 -2362.044 -1840.559 20715592.849 20715592.929 20715598.111 -19120030.31307 -14615861.18307 1017.674 792.993 22754237.972 22754238.147 22754243.199 -11167178.82006 -8449024.42906 2936.621 2288.275 23879970.586 23879970.690 23879977.045 -3915643.17005 -3023012.92305 -961.868 -749.507 22487453.168 22487453.093 22487458.480 -7990702.03006 -5951049.08406 -2162.017 -1684.690
Rinex de NAVEGACIÓN 30 00 8 11 2 0 0.0-3.275135532022D-05-1.477928890381D-12 0.000000000000D+00 4.000000000000D+01-6.093750000000D+00 5.169858202488D-09 1.362239438238D+00 -4.190951585770D-07 5.362690542825D-03 6.673857569695D-06 5.153622058868D+03 4.392000000000D+05-1.043081283569D-07-1.538901799997D+00-7.823109626770D-08 9.436444989925D-01 2.411562500000D+02 1.445954310898D+00-8.276059016792D-09 -3.171560679661D-10 0.000000000000D+00 1.074000000000D+03 0.000000000000D+00 1.000000000000D+00 0.000000000000D+00-7.450580596924D-09 2.960000000000D+02 4.392000000000D+05 0.000000000000D+00 0.000000000000D+00 0.000000000000D+00
Tema 9 - 364

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Cálculo de las posiciones de los satélites Tenemos la época de referencia tomada por el receptor y materializada en el fichero RINEX de observación, 0 8 11 0 0 0.0000000 , el día 8 de Noviembre de 2000, a las 12:00:00. Debemos calcular el tiempo transcurrido desde principio de semana GPS, para ello, procedemos de la siguiente manera (Kai Borre). 1-Cálculo del día Juliano (Hoffman-Wellenhof)
if m <= 2 y = y-1; m = m+12; end jd = floor(365.25*y)+floor(30.6001*(m+1))+d+h/24+1720981.5;
(donde floor implica redondeo hacia el menor entero) y año con 4 dígitos m mes h hora Para la época de observación: 2451767.5 2- Cálculo de la semana GPS y de los segundos transcurridos desde el principio de semana Gps.
a = floor(julday+.5); b = a+1537; c = floor((b-122.1)/365.25); e = floor(365.25*c); f = floor((b-e)/30.6001); d = b-e-floor(30.6001*f)+rem(julday+.5,1); day_of_week = rem(floor(julday+.5),7); week = floor((julday-2444244.5)/7); sec_of_week = (rem(d,1)+day_of_week+1)*86400;
Se obtiene para la época deseada , semana 1074 y segundo de semana 432000 Calculemos la posición del satélite 30, el Toe, o tiempo de referencia de las efemérides es el segundo Gps de referencia. Corresponde a la tercera línea, primera columna, segundo 439200.
En consecuencia el intervalo de tiempo transcurrido es de 432000-439200 = -7200 segundos. Por otra parte ,la pseudodistancia del sat. 30 es de 20659421.934 metros, si dividimos su valor por la velocidad de la luz (299792458 m/s)tenemos el tiempo que ha tardado la señal en viajar, 0.06891241384732 segundos, por tanto el intervalo de tiempo desde Toe es de -7200.069 segundos.
Tema 9 - 365

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Obtengamos a continuación los valores del Rinex para aplicar el algoritmo de efemérides. svprn 30.00000000000000000000 af2 0.00000000000000000000 M0 1.36223943823800000000 roota 5153.62205886800000000000 deltan 0.00000000516985820249 ecc 0.00536269054282500000 omega 1.44595431089800000000 cuc -0.00000041909515857700 cus 0.00000667385756969500 crc 241.15625000000000000000 crs -6.09375000000000000000 i0 0.94364449899250000000 idot -0.00000000031715606797 cic -0.00000010430812835690 cis -0.00000007823109626770 Omega0 -1.53890179999700000000 Omegadot -0.00000000827605901679 toe 439200.00000000000000000000 af0 -0.00003275135532022000 af1 -0.00000000000147792889 toc 439200.00000000000000000000
y utilizando el algoritmo (ver Tabla 3.5), paso a paso tenemos que GM = 3.986005e14 Constante de gravitación universal Omegae_dot = 7.2921151467e-5 Aceleración de la Tierra (Wgs84) a= 2.655982032565084e+007 Semieje mayor n0 = 1.458583245017110e-004 Movimiento medio calculado tk = -7.200068912413844e+003 Intervalo desde Toe n = 1.458634943599135e-004 Movimiento medio corregido M = 0.31201222704113 Anomalía media E = 0.31366687806927 Anomalía excéntrica v = 0.31532577168381 Anomalía verdadera phi = 1.76128008258181 Argumento de la latitud u = 1.76127799016444 Argumento de la latitud corregido r = 2.642411609505970e+007 Radio vector i = 0.94364690845563 Inclinación Omega = -1.62484808447525 Longitud del nodo ascentente corregida xk= 1.54742833873780e+7 Coordenadas en tierra fija yk= 0.41730167179566e+7 " " zk= 2.10087219155275e+7 " "
Tema 9 - 366

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 367

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Estas coordenadas satélite obtenidas están referidas al instante en que se envía la señal desde el satélite. Hasta que se recibe en el receptor del usuario la Tierra rota una cantidad determinada, para cada satélite es:
al=-Omegae_dot*tr con: Omegae_dot = 7.2921151467e-5; % earth rotation rate, rad/s y tr=ps(f)/c; Para rotar las coordenadas del satélite durante el tiempo de viaje de la señal
empleamos una simple rotación de Z.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −
ZrYrXr
ZYX
1000cossen0sencos
αααα
Obteniendo para el caso que nos ocupa:
xk= 1.54743043573117 e+7 yk= 0.41729389569595 e+7 zk= 2.10087219155275 e+7
distancia 80.5389 metros entre posiciónes
Cálculo de las pseudodistancias corregidas 1. Cálculo de la corrección por reloj del satélite. Los coeficientes del reloj para el instante en el que estamos trabajando son: af0 = -3.2751e-005, af1 = -1.4779e-012, af2 = 0 El instante de cálculo para toe = 439200 y segundo de semana= 432000 es tk = -7200 El polinomio corrector es (af0+af1*(tk)+af2*(tk)^2)*c =-9.8154e+003 metros 2. Cálculo de la corrección troposférica En primer lugar se ha de calcular la elevación aproximada del satélite, dado que se conocen las coordenadas aproximadas del satélite y del receptor es posible calcular las componentes NEU del satélite y deducir la elevación. Ejemplo: Coordenadas del receptor: 4851139.752 -314513.819 4116284.998 Coordenadas del satélite 30: 15474304.357 4172938.957 21008721.916 Azimut 44.3904 (gra) Altura 66 50 27.961523 La corrección se puede realizar mediante: 2.312/sin(sqrt(ele*ele+1.904e-3))+0.084/sin(sqrt(ele*ele+0.6854e-3)) con "ele", elevación en radianes y 2.6051 de resultado para la corrección 3. Cálculo de la corrección por ionosfera Este fichero Rinex no tiene los coeficientes de la corrección, por el momento no la hacemos
Tema 9 - 368

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Formación de la matriz de diseño y solución del sistema Una vez obtenidas las coordenadas del satélite y las pseudodistancias corregidas podemos formular las ecuaciones de observación, prácticamente idénticas a las ecuaciones en distancia en una red clásica.
o en forma matricial:
Siendo c la velocidad de la luz (299792458 m/s) y la notación la siguiente:
Superíndice: denota el satélite Subíndice: la estación o receptor
Se puede evaluar como incógnita conjunta cdtk y evitar que la matriz esté mal equilibrada a la hora de invertirla. La primera fila de la matriz A quedaría: -0.51938273672095 -0.21939841754108 -0.82589703182463 -1.00000000000000 y la del término independiente: pseudo+dReloj-dTropo-distancia= 1.961620560436994e+005 La solución mínimo cuadrática nos dará: X 5.1166623925 Y -4.3440337093 Z 5.2999997402
Tema 9 - 369

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 370
cdt -196168.2209311274 y las coordenadas de la estación quedan 4851144.869 -314518.163 4116290.298 Con estas coordenadas se itera de nuevo hasta llegar a unas correcciones pequeñas, por ejemplo: Correcciones -0.0000093984 0.0000083462 -0.0000077541 -196168.2209198036 y unas coordenadas calculadas finales: ϕ 40º 26' 45.062482" λ -3º 42' 34.241244"
4.7. Algunas notas adicionales sobre las ambiguedades
La resolución de la ambigüedad GPS es el proceso de resolver las ambigüedades del
ciclo desconocidas de la doble diferencia de datos de la fase portadora como enteros.
Los modelos GPS se basan en la resolución de la ambigüedad, éstos puede ser vistos
mediante las siguientes ecuaciones de observación linealizadas.
{ } eBbAayE ++=
Donde y es el vector de los datos GPS dado, a y son los vectores del parámetro
incógnita de orden n y p respectivamente, y donde e es el vector del ruido de orden
m. Las Matrices A y B son las matrices de diseño correspondiente de orden m x n y m
x p respectivamente.
b
a
El vector de los términos independientes generalmente consiste en datos "observados
menos calculados" de observaciones fase de simple frecuencia o doble frecuencia y/ o
observaciones código o pseudodistancia.
Los valores del vector son entonces las ambigüedades de la fase de la portadora,
expresado en unidades de ciclos en lugar de distancia. Estos valores son conocidos de
ser enteros.

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 371
Los datos de entrada del vector b consistirán en los parámetros incógnitas restantes,
así como por ejemplo los componentes de la línea base (coordenadas) así mismo
pueden incluir parámetros de retardo atmosférico (troposférico, ionosférico).
El procedimiento que usualmente se sigue para resolver el sobre modelo se puede
dividir en tres pasos.
En el primer paso simplemente se despreocupa de los constreñimientos del entero en
las ambigüedades y realiza un ajuste estándar. Como resultado se obtiene la
estimación (valor real) mínimos cuadrados de y b , junto con su matriz varianza-
covarianza. Esta solución se denomina a menudo
a
solución float, y se denota por y
. Las correspondientes matrices varianza-covarianza son denotadas por y .
a
b aQ ˆ bQ
En el segundo paso la ambigüedad float estimada a se emplea con el cálculo de la
estimación de la ambigüedad entera correspondiente. Esto implica una representación
, del espacio de los reales al espacio entero de n dimensiones.
ˆ
nn ZRF →:
Una vez que se calculan las ambigüedades enteras, se usan en el tercer paso para
finalmente corregir la estimación float de , utilizando la siguiente ecuación: b
baaabbb
aab
QQQQQ
aaQQbb
ˆˆ1
ˆˆˆˆ
1ˆˆˆ )ˆ(ˆ
−
−
−=
−−=
El resultado b y su correspondiente Q están referidas a la solución fijada.
Observamos que la matriz varianza-covarianza resultante está basada en la suposición
que después del paso de obtener la solución fijada las ambigüedades son cantidades
conocidas. Si es una suposición aceptable o no, depende de la situación real, y queda
al criterio del usuario.
b
4.8. Estimación de Mínimos Cuadrados Enteros
En el párrafo anterior menciona la representación del espacio de n dimensiones de los
números reales al espacio de los números enteros. Existen numerosas
representaciones posibles, desde un simple redondeo de cada elemento del vector

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 372
ambigüedad a su entero más cercano, a representaciones mucho más complicadas
como la estimación de mínimos cuadrados enteros.
Recientemente se ha probado que el uso de la estimación de mínimos cuadrados
Desgraciadamente no existen ecuaciones de forma cerrada que resuelvan este
allada por medio de un procedimiento
adecuado de búsqueda.
e precisión de estos elementos, sería muy embarazoso
realizar el proceso. Mediante la reparametrización de las ambigüedades, podemos
umentar la precisión de los elementos del vector ambigüedad y al mismo tiempo la
correlación entre ellos decrece.
el elipsoide alargado es
transformado en casi un esferoide. El número de candidatos se mantiene, pero pueden
er encontrados más fácilmente. Como observamos la transformación del área se
conserva (o en dimensiones mayores, el volumen).
enteros es óptima en el sentido de que este estimador maximiza la probabilidad que
realmente se hallan los enteros correctos.
problema. En cambio la solución puede ser h
4.9. Decorrelación de las Ambigüedades
En teoría podríamos ejecutar la búsqueda como se mencionó en la anterior sección con
las ambigüedades en dobles diferencias originales. Sin embargo, debido a que
normalmente hay una alta correlación entre los elementos del vector de la
ambigüedad, así como una pobr
a
Gráficamente, comprobamos que el elipsoide de búsqueda de la ambigüedad es
extremadamente alargado, por lo tanto la búsqueda lleva mucho tiempo. Realizando
una reparametrización multi-canal de las ambigüedades,
s

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 373
Figura 6.1. El efecto de decorrelación de las ambigüedades en la búsqueda del
elipsoide en este ejemplo de dos dimensiones.
Esta reparamerización se refiere a la transformación Z que transforma las
ambigüedades de doble diferencia originales en un nuevo conjunto de
ambigüedades . La matriz varianza-covarianza correspondiente es
tran ZQZQ az ˆ*
ˆ = . La matriz Z, o matriz de transformación depende de la
matriz varianza-covarianza de las ambigüedades float
aZz =
en
*
sformada
.
5. Tendencias de Investigación
En la década pasada, las técnicas de resolución de la ambigüedad han mejorado,
gracias a los procesos de búsqueda de la ambigüedad, que son cada vez más eficientes
en la obtención de técnicas de resolución de ambigüedades prácticas. De hecho, las
técnicas de resolución de la ambigüedad han apuntado a la eficiencia computacional.
Desdichadamente, la competición para conseguir los algoritmos de búsqueda de la
ambigüedad más eficiente parece ya saturada porque los logros en eficiencia
computacional parecen suficientes para muchas aplicaciones prácticas. Por ejemplo,
algunas técnicas como FASF, LAMBDA y OMEGA proveen soluciones de ambigüedad y
de posicionamiento de alrededor de los diez milisegundos. De esta manera, la
velocidad es más que satisfactoria para muchas aplicaciones.

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Aunque muchas de las técnicas actuales disponibles son bastante eficientes, esto no
significa que sean innecesarias las investigaciones para buscar algoritmos de búsqueda
mejores.
Por el contrario, las técnicas de resolución de la ambigüedad no han sido normalmente
descritas en términos de un procedimiento generalizado (o estándar) que incluya:
• Un modelo funcional (o determinístico) que describe las relaciones entre
observaciones y parámetros incógnitas.
• un modelo estocástico que representa las características del ruido de las
observaciones.
• un esquema de control de calidad que maneja pérdida de ciclos.
• un esquema de estimación de parámetros que determina los parámetros
de la ambigüedad así como soluciones de navegación.
Como resultado, no está claro si los rendimientos descritos en los informes tratan de
casos aislados (“mejores”) o pueden estar reproducidos en cualquier lugar, en
cualquier instante y bajo cualquier configuración.
Desdichadamente, la falta de un procedimiento generalizado está todavía presente
aunque se haya realizado un progreso. Además, no hay un acuerdo general en la
forma de llevar a cabo este procedimiento generalizado hasta ahora.
Como mencionamos anteriormente, el objetivo general de las técnicas de resolución de
la ambigüedad incluye el "rendimiento" (o proporción de éxito) de la resolución de la
ambigüedad.
Las cuestiones relacionadas con el “rendimiento” son dos:
1. ¿Cómo incrementamos el éxito en el rendimiento?
2. ¿Cómo evaluamos el rendimiento?
La primera cuestión está involucrada con la realización cualitativa del rendimiento,
mientras la segunda está relacionada con la evaluación cuantitativa del rendimiento.
Tema 9 - 374

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Para obtener soluciones óptimas en la estimación de mínimos cuadrados, deberían ser
especificados apropiadamente un modelo funcional y un modelo estocástico. En
cuanto los modelos son corregidos, en principio, las soluciones óptimas no están
sesgadas, podemos obtener las soluciones correctas. Esto también se cumple para la
estimación paramétrica de la ambigüedad porque está basada en la teoría de
estimación de mínimos cuadrados entera. Por lo tanto, la obtención de un alto
rendimiento (es decir, la determinación de los valores paramétricos de la ambigüedad
correcta) depende en como podamos establecer correctamente los modelos
funcionales y estocásticos. Con respecto a la función modelo, el error específico
modelado y el modelado paramétrico para las fuentes de error (retraso ionosférico,
retraso troposférico, error orbital del satélite multicamino...) Aunque la investigación
se ha centrado intensivamente en esta área, el interés es todavía creciente,
particularmente para las aplicaciones que requieren tiempo-real, largas líneas bases y
soluciones cinemáticas. Por otro lado, el modelado estocástico ha recibido menos
atención que el modelado funcional. La obtención de los modelos estocásticos más
realistas está en pleno auge en este momento.
Hay dos aproximaciones para la evaluación del rendimiento:
1. El planteamiento de la función evaluación del rendimiento
2. El planteamiento de la función discriminación
La primera aproximación intenta evaluar el rendimiento de los parámetros de la
ambigüedad entera utilizando propiedades probabilísticas de los estimadores de la
ambigüedad entera. Teunissen, ha propuesto la función evaluación particularmente en
la técnica bootstraping entera (es decir, el redondeo entero condicional secuencial) que
es adoptada por el método LAMBDA. Por el otro lado, la segunda aproximación intenta
medir el poder de discriminación entre el candidato con la ambigüedad mejor y la
segunda mejor.
Comparado con las actividades para la realización cualitativa mencionada
anteriormente, la investigación en la evaluación cuantitativa ha sido menos intensa
hasta ahora. Sin embargo, este tema está empezando a cambiar.
Tema 9 - 375

Curso avanzado de posicionamiento por satélite Madrid, noviembre 2009
Tema 9 - 376
Con un nivel creciente en investigación en recientes aplicaciones en tiempo-real de
largas líneas bases (cinemáticas), algunas de estas investigaciones se han mostrado
en el campo de la resolución de la ambigüedad. Aunque hemos notado ya la amplia
investigación de la resolución de la ambigüedad en la época pasada, esta investigación
normalmente fue dirigida hacia aplicaciones de post-proceso y estáticas. Sin embargo,
los temas mencionados anteriormente como eficiencia computacional, fiabilidad y
rendimiento están inherentes en las aplicaciones en tiempo-real, líneas bases largas o
cinemáticas.







![PROBLEMAS DE CALCULO DIFERENCIAL E INTEGRALfiles.calculodiferencial-g1.webnode.cl/200000063-dc4ecdd... · 2012. 12. 12. · 7. Expresar (—1,10] como una intersección de dos intervalos](https://static.fdocuments.es/doc/165x107/61432115f4b63467dd718d1b/problemas-de-calculo-diferencial-e-2012-12-12-7-expresar-a110-como-una.jpg)