Temas Todo-gps II
126
EL SISTEMA DE POSICIONAMIENTO GLOBAL Guillermo Píriz Mira 1 ÍNDICE GENERAL: 1 EL SISTEMA DE POSICIONAMENTO GLOBAL (GPS) 1 1.1 Introducción. 1.2 Sector Espacial. 1.2.1 Característica de las Señales. 1.3 Control de los Satélites. 1.4 Sector de Usuarios. 1.4.1 Descripción de los Receptores GPS. 1.4.2 Técnicas de Procesamiento de la Señal. 1.4.3 Evolución de Receptores GPS. 1.5 Mensaje de Navegación. 1.5.1 Representación de las Órbitas de los Satélites. 1.5.2 Cálculo de las Coordenadas de los Satélites. 1.5.3 Estructura del Mensaje de Navegación. 1.5.4 Mensajes de Navegación en Formato RINEX. 1.6 Impacto de la Disponibilidad Selectiva y AntiFraude. 1.7 Desarrollo Actual del Sistema GPS. 2 SISTEMAS DE REFERENCIA 29 2.1 Introducción. 2.2 Sistemas de Referencia Convencionales. 2.2.1 Transformación entre Sistemas Celeste y Terrestre. 2.3 Sistema de Referencia GPS. 2.4 El Sistema Geodésico Español. 2.4.1 Definición del Sistema. 2.4.2 Integración del Sistema. 2.5 Transformación de Coordenadas WGS84 a ED50 y Viceversa. 2.5.1. Conversión de Coordenadas Geodésicas en Cartesianas Tridimensionales. 2.5.2. Transformación de Coordenadas ED50 a WGS84 y Viceversa. 2.5.3. Conversión de Coordenadas Cartesianas en Geodésicas.
-
Upload
fco-javier-diaz-izquierdo -
Category
Documents
-
view
17 -
download
0
description
Teoría de los Sistemas de Posicionamiento Globales
Transcript of Temas Todo-gps II

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 1
ÍNDICE GENERAL:
1 EL SISTEMA DE POSICIONAMENTO GLOBAL (GPS) 1
1.1 Introducción.
1.2 Sector Espacial.
1.2.1 Característica de las Señales.
1.3 Control de los Satélites.
1.4 Sector de Usuarios.
1.4.1 Descripción de los Receptores GPS.
1.4.2 Técnicas de Procesamiento de la Señal.
1.4.3 Evolución de Receptores GPS.
1.5 Mensaje de Navegación.
1.5.1 Representación de las Órbitas de los Satélites.
1.5.2 Cálculo de las Coordenadas de los Satélites.
1.5.3 Estructura del Mensaje de Navegación.
1.5.4 Mensajes de Navegación en Formato RINEX.
1.6 Impacto de la Disponibilidad Selectiva y AntiFraude.
1.7 Desarrollo Actual del Sistema GPS.
2 SISTEMAS DE REFERENCIA 29
2.1 Introducción.
2.2 Sistemas de Referencia Convencionales.
2.2.1 Transformación entre Sistemas Celeste y Terrestre.
2.3 Sistema de Referencia GPS.
2.4 El Sistema Geodésico Español.
2.4.1 Definición del Sistema.
2.4.2 Integración del Sistema.
2.5 Transformación de Coordenadas WGS84 a ED50 y Viceversa.
2.5.1. Conversión de Coordenadas Geodésicas en Cartesianas Tridimensionales.
2.5.2. Transformación de Coordenadas ED50 a WGS84 y Viceversa.
2.5.3. Conversión de Coordenadas Cartesianas en Geodésicas.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 2
3 LAS OBSERVABLES GPS: CARACTERÍSTICAS Y ERRORES 41
3.1 Los Observables GPS.
3.1.1 Medidas de Seudodistancia.
3.1.2 Fase de la Onda Portadora.
3.2 Errores Propios de los Observables.
3.2.1 Errores Relacionados con los Satélites.
3.2.2 Errores Relacionados con la Propagación de la Señal.
3.2.3 Errores Relacionados con el Receptor y la Antena.
3.2.4 Errores Relacionados con la Estación.
4 MODELOS MATEMÁTICOS USADOS EN GPS 57
4.1 Introducción.
4.2 Ajuste mediante Mínimos Cuadrados.
4.2.1 El Método de Observaciones Indirectas.
4.2.2 Cálculo y Estimación por Mínimos Cuadrados.
4.2.3 Modelos No Lineales.
4.2.4 Evaluación de los Datos.
4.3 Modelo Matemático de los Observables GPS.
4.3.1 Combinaciones Lineales de los Observables GPS.
4.3.2 Diferenciación de los Observables.
4.3.2.1 Simples Diferencias.
4.3.2.2 Dobles Diferencias.
4.3.2.3 Triples Diferencias.
4.3.3 Matriz Varianza-Covarianza de los Observables.
4.3.4 Linealización de los Observables GPS.
5 TÉCNICAS DE POSICIONAMIENTO GPS 70
5.1 Introducción.
5.2 Posicionamiento Absoluto.
5.2.1 Disminución de la Precisión.
5.3 Posicionamiento Relativo.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 3
5.3.1 Posicionamiento Relativo Estático.
5.3.2 Posicionamiento Relativo en Tiempo Real.
5.3.3 Posicionamiento Relativo Estático Rápido.
6 ASPECTOS PRÁCTICOS Y ALGUNAS APLICACIONES DEL GPS, 86
6.1 Introducción.
6.2 Proceso del Proyecto GPS.
6.2.1 Planificación y Reconocimiento.
6.2.2 Recogida de Datos.
6.2.3 Procesamiento de los Datos.
6.3 Algunas Aplicaciones del GPS.
6.3.1 La Red Global IGS.
6.3.2 Redes Fundamentales GPS en España.
6.3.3 El Proyecto RECORD.
6.3.4 Establecimiento de Control Vertical.
6.4. Otros Sistemas de Posicionamiento.
6.4.1 El Sistema GLONASS.
6.4.2 GALILEO: El Proyecto Europeo de Posicionamiento.
7. GLOSARIO DE TÉRMINOS Y ACRÓNIMOS GPS. 103
8. REFERENCIAS BIBLIOGRÁFICAS. 117

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 4
1. EL SISTEMA DE POSICIONAMIENTO GLOBAL:
Conceptos Preliminares
1.1 Introducción
El Sistema de Posicionamiento Global, conocido por GPS (Global Positioning
System) o NAVSTAR-GPS (NAVgation Satellite with Time And Ranging), es un sistema
de radio-navegación desarrollado por el Departamento de Defensa de los Estados Unidos
de América (DoD-Department Of Defense), con la intención de convertirlo en el principal
sistema de navegación del ejército americano. Como consecuencia de la alta exactitud
proporcionada por el sistema y por el alto grado de desarrollo de la tecnología empleada
en los receptores GPS, surgió una gran comunidad de usuarios en las más diversas
aplicaciones civiles (navegación, posicionamiento geodésico y topográfico, etc.).
El GPS es un sistema de aplicación global, tal como su nombre indica. La
concepción del sistema permite que un usuario, en cualquier lugar de la superficie
terrestre, tenga a su disposión, como mínimo, cuatro satélites visibles que pueden ser
rastreados. Este número de satélites permite el posicionamiento en tiempo real, como
veremos más adelante. Para los usuarios del área de geodesia y topografía, una
característica muy importante de la tecnología GPS con relación a los métodos de trabajo
convencionales, es que no es necesaria la intervisibilidad entre las estaciones. Por otro
lado, el GPS se puede utilizar bajo cualquier condición climática.
La idea básica del principio de navegación se basa en la medida de las distancias,
llamadas seudodistancias, entre el usuario y cuatro satélites. Conociendo las coordenadas
de los satélites en un sistema de referencia apropiado, es posible calcular las coordenadas
de la antena del usuario respecto al mismo sistema de referencia de los satélites. Desde el
punto de vista geométrico, sólo tres medidas de seudodistancias serían suficientes, la
cuarta medida se hace necesaria debido a la falta de sincronización de los relojes de los
satélites con respecto al del usuario.
En el GPS hay dos tipos de prestaciones, los cuales son conocidos como SPS
(Standard Positioning Service) y PPS (Precise Positioning Service). El SPS es un servicio
de posicionamiento y tiempo patrón que está disponible para todos los usuarios del globo,
sin cobro de ningún tipo de impuesto (por lo menos en los próximos años). Este servicio
proporciona la capacidad de obtener exactitud horizontal y vertical dentro de 100 y 140
metros respectivamente, y 340 ns (nanosegundos) en la obtención de medidas de tiempo
(95% de probabilidad). El PPS proporciona mejores resultados ( 10 a 20 metros), pero está
restringido al uso militar y usuarios autorizados. En realidad el sistema tiene capacidad
para proporcionar mejores niveles de exactitud, pero el Departamento de Defensa
americano, no está interesado en ello, téngase en cuenta que el sistema es global, y puede
poner en riesgo aspectos de seguridad. De esta forma, la limitación al nivel de exactitud

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 5
citado anteriormente queda garantizada por la adopción de la SA (Selective Availability) y
del AS (Anti-Spoofing). La SA (disponibilidad selectiva), o sea, la prohibición de obtener
la exactitud proporcionada por el GPS, se realiza mediante manipulación de los mensajes
de navegación (técnica épsilon: ) y de la frecuencia de los relojes de los satélites (técnica
delta: ). El AS (anti-fraude) es un proceso de criptografía del código P, intentando
protegerlo de imitaciones por usuarios no autorizados.
Fundamentalmente el GPS consta de tres sectores o segmentos principales:
Espacial, Control y Usuarios.
1.2 Sector Espacial
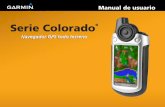
El sector espacial está formado por una constelación de 24 satélites distribuidos en
seis planos orbitales igualmente espaciados (cuatro satélites en cada plano), a una altitud
aproximada de 20180 km. Los planos orbitales están inclinados 550, con relación al
ecuador y el período orbital es de aproximadamente 12 horas sidéreas. De esta forma, la
posición de cada satélite se repite, cada día, tres minutos y cincuenta y seis segundos antes
que la del día anterior. Esta configuración garantiza que, como mínimo, cuatro satélites
GPS sean visibles en cualquier punto de la superficie terrestre, y a cualquier hora. Las
Figuras 1.1 y 1.2 ilustran respectivamente la constelación de los satélites GPS y la
distribución de los mismos en cada uno de los planos orbitales.
Figura 1.1: Constelación de los Satélites NAVSTAR-GPS

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 6
ECUADOR
ASCENSION RECTA
DEL NODO
ASCENDENTE
40
80
120
160
320
280
240
200
325,7 25,7 85,7 145,7 205,7 265,7
PLANO A B C D E F
1
2
3
4
1
0
3
4
4
1
2
3
1
2
3
4
4
1
2
3
1
2
3
4
0
0
0
0
0
0
0
0
00 0 0 0
2
Figura 1.2: Distribución de Satélites en la Constelación (Seeber, 1993)
Tres tipos de satélites forman parte del proyecto NAVSTAR-GPS. Son los
denominados satélites del Bloque I, II y IIR. Los satélites del bloque I son prototipos y los
11 satélites planificados ya fueron lanzados. El último satélite de este bloque, PRN 12, fue
desactivado a finales de 1995. Un total de 28 satélites del Bloque II ( satélites
operacionales) se han proyectado para dar soporte a la configuración de 24 satélites, que
ya están operativos. A título de información, el sistema se declaró operacional (24 satélites
operacionales probados y en pleno uso) el 27 de abril de 1995. Los satélites del bloque II
son sustituidos por 20 satélites del bloque IIR, a medida que sea necesario. Dos de las
nuevas características de estos satélites son la capacidad de medir distancias entre ellos y
calcular efemérides en el propio satélite (Seeber, 1993).
Cada satélite dispone de patrones de frecuencia altamente estables (Cesio y
Rubidio) con estabilidad entre 10-12
y 10-13
, formando una base de tiempo muy precisa.
Los satélites del bloque II están equipados con dos osciladores de Cesio y dos de Rubidio,
mientras que los satélites del bloque I fueron equipados con osciladores de cuarzo con
estabilidad entre 10-6
y 10-8
, que son los que normalmente llevan los receptores en tierra.
Se espera que la próxima generación de satélites estén equipados con osciladores de
Hidrogeno con una estabilidad de 1410 .
Los satélites GPS se identifican con dos esquemas de numeración. El SVN (Space
Vehicle Number), el número NAVSTAR que se basa en la secuencia de lanzamiento de
los satélites y el número del PRN (Pseudo-Random-Noise) o SVID (Space Vehicle
IDentification) se relaciona con la configuración de la órbita y el segmento de PRN
atribuido a cada satélite.
1.2.1 Características de las Señales GPS

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 7
Cada satélite GPS transmite dos ondas portadoras: L1 y L2 (dentro de la Banda L,
entre 1 y 2 GHz). Estas son generadas a partir de una frecuencia fundamental de 10.23
MHz, la cual se multiplica por 154 y 120 respectivamente. De esta forma, las frecuencias
(L) y las longitudes de onda (), de L1 y L2 son:
L1= 1575,42 MHz. = 19,05 cm.
L2= 1227,60 MHz. = 24,45 cm.
Estas dos frecuencias se generan simultáneamente, permitiendo a los usuarios
corregir gran parte de los errores debidos a la refracción ionosférica.
Los códigos PRN (Pseudo Random Noise) se modulan sobre estas dos portadoras.
Un PRN es una secuencia binaria (0 y 1 o +1 y -1) que parece tener característica
aleatoria. Como es generado por un algoritmo, puede ser unívocamente identificado. El
código C/A (Coarse Acquisition), con un período de 1 milisegundo y longitud de onda de
alrededor de 300 metros, es transmitido en el rango de 1.023 MHz y modulado sólo sobre
la onda portadora L1. Este es el código a partir del cual los usuarios civiles consiguen las
seudodistancias que permiten obtener la exactitud estipulada en el SPS. Este código no se
criptografía, aunque pueda tener su precisión degradada. El código P (Precise or
Protected) ha sido reservado para uso de los militares americanos y otros usuarios
autorizados. Su longitud de onda es del orden de 30 metros y es transmitida en el rango de
10.23 MHz (una secuencia de 10,23 millones de dígitos binarios por segundo), modulado
sobre las portadoras L1 y L2, con un período de 266 días. Cada satélite contiene el
correspondiente a 7 días de este código, o sea, una semana de las 38 posibles. De esta
forma, todos los satélites transmiten en la misma frecuencia y pueden ser identificados por
su –única- semana correspondiente. El seguimiento del código atribuido a cada satélite es
reiniciado cada semana a las 0 horas TU (Tiempo Universal) de sábado para domingo. El
hecho de que el código P sea modulado en un rango más alto, hace que el mismo sea más
preciso, sin embargo, el código P está encriptado (AS) y pasa a denominarse código Y, el
cual no está disponible para los usuarios civiles.
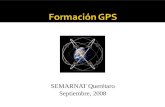
La señal básica GPS se ilustra en la figura 1.3. Los mensajes de navegación
también se modulan sobre las portadoras, estos mensajes contienen los parámetros
orbitales, datos para corregir la propagación en la atmósfera, parámetros para corrección
del error de los relojes de los satélites, estado o salud de los satélites, etc.
De esta breve explicación se puede observar que hay tres tipos de señales: la
portadora, los códigos y los datos (navegación, reloj, etc.). Esta estructura permite no sólo
medir la fase de la portadora y su variación, sino también el tiempo de propagación. Este
último se consigue mediante la modulación de la fase (00 o 180
0), siguiendo uno de los
códigos PRN.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 8
FRECUENCIA
FUNDAMENTAL
10,23 MHz
L1
1575,42 MHz
CÓDIGO C/A
1,023 MHz
CÓDIGO P
10,23 MHz
L2
1227,60 MHz
CÓDIGO P
10,23 MHz
÷10
*154
50 BPS ---------- MENSAJE DE NAVEGACIÓN
*120
÷1
Figura 1.3: Estructura básica de la señal GPS
La señal L1 puede ser descrita como (Spilker, 1980):
S A P t D t sen w t A C t D t w tL p i i c i i!
( ) ( ) ( ) ( ) ( )cos( ) 1 1
(1.1)
donde:
Ap es la amplitud del código P,
Pi(t) es la secuencia del código P (+1, -1),
Di(t) es el flujo de los datos con estado (+1, -1),
Ac es la amplitud del código C/A,
Ci(t) es la secuencia del código C/A (+1, -1), y
sen(w1t) es la señal de la onda portadora.
El índice i representa el satélite en cuestión. La señal L2 tiene una estructura más
simple, porque contiene solamente el código P:
S B P t D t sen w tL p i i2 2 ( ) ( ) ( ) (1.2)
En esta ecuación Pi(t) es nuevamente la secuencia del código P para el satélite i,
mientras Bp representa su amplitud. El momento (t) de los dos códigos y portadoras se
sincronizan.
La figura 1.4 ilustra la combinación del código y la portadora. Como los códigos
PRN y los mensajes son flujo de datos binarios, sólo los estados (+1) y (-1) dejan la
portadora inalterada. La transmisión de un código de (+1) a (-1), o de (-1) a (+1) sólo
causa una variación en la fase de 1800.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 9
PORTADORA
CÓDIGO
PORTADORA MODULADA
EN FASE DE CÓDIGO
Figura 1.4: Estructura de las señales de los Satélites GPS
El acceso directo al código P sólo es posible para receptores bien sincronizados
con el sistema de tiempo GPS y posicionado en un punto con coordenadas bien definidas.
Esta es la razón por la cual, en general, el acceso se realiza con la ayuda del código C/A
vía HOW (Hand Over Word), el cual contiene el contador Z (Z-count) que acompaña los
mensajes de los satélites. El contador Z se define como un número entero, con período de
1.5 segundos, y contado desde el inicio de la semana GPS, identificando de esta forma la
fase de registro de los datos en tiempo GPS. Cuando el contador Z es conocido, la
adquisición del código P puede hacerse en los próximos seis segundos (Seeber, 1993).
1.3 Sector de Control
Las principales tareas del sector de control son:
monitorizar y controlar continuamente el sistema de satélites,
determinar el sistema de tiempo GPS,
predecir las efemérides de los satélites,
calcular las correcciones de los relojes de los satélites, y
actualizar periódicamente los mensajes de navegación de cada satélite.
El sistema de control se compone de cinco estaciones monitoras (Hawai,
Kwajalein, Ascensión Island, Diego García, Colorado Springs), tres antenas para
transmitir los datos a los satélites, (Ascension Island, Diego Garcia, Kwajalein), y una
estación de control central (MCS: Master Control Station) localizada en Colorado Springs
EE.UU. (figura 1.5). Cada estación monitora está equipada con un oscilador externo de
alta precisión y un receptor de doble frecuencia, el cual rastrea todos los satélites visibles
y transmite los datos a la MCS, vía sistema de comunicación. Los datos son procesados en

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 10
la MCS para determinar la órbita de los satélites (efemérides transmitidas) y las
correcciones de los relojes de los satélites a fin de actualizar periódicamente los mensajes
de navegación. La información actualizada es enviada a los satélites a partir de las antenas
terrestres. Las estaciones de control (Monitor Station) tuvieron, originalmente, sus
coordenadas determinadas con relación al WGS-72, en enero de 1987 fue adoptado
definitivamente el WGS84. Las pruebas de ajuste del WGS84, realizadas por el DMA
(Defense Mapping Agency), mostraron que la nueva versión de este sistema, denominada
WGS84 (G730, donde G representa que el ajuste fue realizado usando GPS y 730 indica la
semana GPS en que fue realizado) es compatible con el ITRF-92 (IERS Terrestrial
Reference Frame 1992), del orden del decímetro.
La distribución geográfica de las estaciones monitoras atiende a los requisitos de
navegación, pero no satisface la determinación de órbitas altamente precisas debido a su
distribución irregular, en particular para aplicaciones de geodinámica. El Servicio GPS
Internacional de Geodinámica (IGS: International GPS Service for Geodynamics),
establecido por la Asociación Internacional de Geodesia (IAG: International Association
of Geodesy) tiene capacidad de producir efemérides con precisión del orden de 20
centímetros para cada una de las coordenadas del satélite, la cual es capaz de atender la
mayoría de las aplicaciones que exijan alta precisión.
ColoradoSprings
Ascensión Diego García
Hawai
Kwajalein
Estación de Control Principal Antena Terrestre de ComprobaciónEstación Monitora de Seguimiento
Figura 1.5: Configuración del Segmento de Control Terrestre del GPS
1.4 Sector de Usuarios
El sector usuario está compuesto por los receptores GPS en Tierra, los cuales
deben ser apropiados para utilizar la señal GPS para fines de navegación, geodesia,
topografía u otra actividad complementaria cualquiera. La categoría de usuarios se puede

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 11
dividir en civil y militar. Actualmente hay una gran cantidad de receptores en el mercado
civil, para las más diversas aplicaciones, lo que demuestra que el GPS realmente ha
alcanzado su madurez.
1.4.1 Descripción de los Receptores GPS
Los principales componentes de un receptor GPS, tal como se muestra en la figura
1.6 son:
Antena con preamplificador,
Sección de RF (radio frecuencia) para identificación y procesamiento de la señal,
Microprocesador para control del receptor, muestra y procesamiento de datos,
Reloj u oscilador,
Interfaz para el usuario, panel con pantalla de datos y mandos,
Provisión de energía (baterías), y
Memoria para almacenar los datos.
La antena detecta las ondas electromagnéticas emitidas por los satélites, convierte
la energía de la onda en corriente eléctrica, amplifica la señal y la envía a la sección
electrónica del receptor. Debido a la estructura de las señales GPS, todas las antenas deben
ser polarizadas circularmente. La antena debe tener buena sensibilidad para garantizar la
recepción de señal débil y el rango de ganancia debe permitir la recepción de todas las
elevaciones y acimutes visibles. Para trabajos geodésicos o topográficos, la antena debe
garantizar, además, alta estabilidad del centro de fase de la antena y protección contra
multicamino o señales reflejadas. Existen varios tipos de antenas disponibles en el
mercado: monopole o dipole, helix, spiral helix, microstrip y choke ring. Según Seeber
(1993), uno de los tipos de antenas más frecuentemente utilizada es la microstrip, la cual
es ideal para equipos GPS de pequeño tamaño. En general, las antenas geodésicas deben
permitir la recepción de las dos ondas portadoras (L1 y L2). La protección contra el
multicamino (señales reflejadas) se consigue, normalmente, colocando la antena sobre un
gran disco o mediante el uso de choke ring. Un choke ring se compone de bandas
conductoras concéntricas con el eje vertical de la antena y fijadas al disco, cuya función es
impedir que la mayoría de las señales reflejadas sean recibidas por la antena.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 12
Antena
y
Preamplificador
Procesador de Señal
Rastreado
r deCódigo
Rastreador
deFase
Oscilador
Micro-
Procesador
Memoria
Suplemento
de Energía
Externa
Descargador
Externo de
Datos
Unidad de
mandos y
Display
Figura 1.6: Principales componentes de un Receptor básico GPS
Las antenas GPS están protegidas para que perduren en el tiempo y evitar posibles
daños. Para ello se utiliza un tipo de material plástico especial, el cual debe mantener las
señales con mínimas interferencias y tan próximas del original como sea posible. Las
señales GPS son muy débiles, teniendo aproximadamente la misma potencia que las
transmitidas por los satélites de TV geoestacionarios. La razón por la cual los receptores
GPS no necesitan una antena de dimensión igual a las parabólicas es debido a la estructura
de las señales GPS y la facilidad de los receptores en captarlas. La captación de las señales
GPS está más concentrada en el receptor que en la antena propiamente dicha. De cualquier
forma, una antena GPS, generalmente, contiene un preamplificador de bajo ruido que
aumenta la señal antes de alimentar al receptor.
Las señales GPS sufren interferencias cuando pasan a través de la mayoría de las
estructuras. Algunas combinaciones de antena/receptor son capaces de captar señales
recibidas dentro de casas de madera, sobre el panel de control de vehículos, en la ventana
de aviones. Naturalmente, se recomienda que las antenas se monten con un amplio ángulo
de recepción, sin obstrucciones. Bajo vegetación densa, particularmente si está húmeda,
las señales GPS se atenúan de tal modo que muchas combinaciones antena/receptor
presentan dificultades en captarlas.
Las señales que entran en el receptor son convertidas en la división de radio
frecuencias (RF), a una frecuencia más baja, denominada frecuencia intermedia (FI), la
cual es más fácil de ser tratada en las demás partes del receptor. Esto se obtiene mediante
combinación de la señal recibida en el receptor con una señal senoidal generada en el
oscilador del propio receptor. Los osciladores de los receptores GPS son, normalmente, de
cuarzo, de mejor calidad que los utilizados en los relojes de pulsera, aunque algunos
receptores geodésicos permiten el uso de osciladores externos, tal como el tipo atómico.
La señal FI contiene toda la modulación presente en la señal transmitida, pero la
onda portadora se presenta desplazada en frecuencia. El desplazamiento es la diferencia
entre la frecuencia recibida (original) y la generada en el oscilador del receptor. Se la

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 13
denomina normalmente frecuencia de barrido de la portadora (Langley, 1995). Múltiples
pasos de FI se utilizan en la mayoría de los receptores, reduciendo la frecuencia de la
portadora en etapas. Finalmente, la señal FI se trabaja en los rastreadores de la señal, o
sea, en los canales.
El canal de un receptor es considerado como su unidad electrónica primordial,
pudiendo poseer uno o más canales. Existen receptores con diferentes tipos de canales que
pueden ser divididos en multicanales, secuenciales y multiplexados.
En los receptores multicanales, también denominados canales paralelos, cada canal
rastrea continuamente uno de los satélites visibles. Como mínimo son necesarios cuatro
canales, aunque es aconsejable cinco para obtener posición y corrección del reloj en
tiempo real. Evidentemente si hubiera más canales disponibles podrían ser rastreado un
mayor número de satélites. Los receptores modernos cuentan con hasta 12 canales para
cada frecuencia.
En los receptores secuenciales, el canal salta alternativamente de satélite dentro de
intervalos regulares, normalmente no coincidentes con la transmisión de los datos,
haciendo que el mensaje del satélite sólo sea recibido completamente después de varias
secuencias. Algunos receptores disponen de un canal dedicado exclusivamente a la lectura
de los mensajes. En la mayoría de los casos, en este tipo de receptores, se utilizan canales
secuenciales rápidos, cuya alternancia es del orden de un segundo.
En la técnica multiplex, las secuencias se efectúan entre satélites a una velocidad
muy alta y, cuando es el caso, en las dos frecuencias. De esta forma, la razón de cambio en
los mensajes de navegación es mucho mejor sincronizada (diferente de la técnica
secuencial), permitiendo que las mismas sean obtenidas casi simultáneamente. Una
ventaja de la técnica multiplex sobre la de multicanales es que no necesita considerar los
efectos sistemáticos entre canales. Un receptor que utilice la técnica multiplex necesita del
orden de 30 segundos para obtener la primera posición, es decir, practicamente la misma
que en los receptores con canales paralelos.
Los receptores con un único canal son de bajo coste, pero como son lentos en la
adquisición de datos, quedan restringidos a aplicaciones de baja velocidad. Los de canales
paralelos son más rápidos, aunque presenten efectos sistemáticos entre canales, los cuales
son minimizados en el proceso de calibración realizado por el microprocesador. La
mayoría de los receptores geodésicos y topográficos tienen de 6 a 12 canales paralelos,
con capacidad para rastrear todos los satélites visibles sobre el horizonte del lugar.
El microprocesador es necesario en el control de las operaciones del receptor
(obtener y procesar la señal, decodificar el mensaje de navegación), así como para calcular
posiciones y velocidades, aparte de otras funciones (control de los datos de entrada y
salida, mostrar informaciones). Esencialmente, éste utiliza datos digitales para efectuar sus
funciones.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 14
La unidad de mando y display proporciona la interacción con el usuario. Las teclas
se pueden utilizar para introducir comandos con vistas a seleccionar las más variadas
opciones de recogida de datos, monitorización de las actividades del receptor, mostrar las
coordenadas calculadas y otros detalles (DOP, satélites rastreados, ángulo de elevación,
etc.), tipo de misión, así como para introducir el nombre del proyecto y/o trabajo a
realizar, la altura de antena e identificación del punto estación, también es posible realizar
un seguimiento de las observaciones efectuadas. La mayoría de los receptores dispone de
una serie de operaciones preestablecido, no requiriendo intervención del usuario.
Los receptores disponen también de memoria interna para almacenaje de las
observaciones (seudodistancia y medidas de fase de la portadora) y de las efemérides
transmitidas. Algunos receptores poseen, como añadido al almacenaje interno, capacidad
de almacenar los datos directamente en discos duros, tarjetas PCMCIA, disquetes
conectados externamente a microordenadores u otros. La transferencia de datos exige la
presencia de puertos serie del tipo RS-232, los cuales permiten que algunos tipos de
receptores puedan ser controlados remotamente.
El abastecimiento de energía ha sido un factor muy crítico en los receptores de la
primera generación, debido al alto consumo. Los receptores modernos se conciben para
que tengan un consumo mínimo de energía. Algunos llegan incluso a operar con baterías
comunes (pilas), aunque dispongan de una batería interna recargable como suplemento a
la entrada de energía externa.
Los receptores GPS pueden dividirse según varios criterios. Una posible
clasificación puede ser, según la comunidad usuaria: receptor militar, civil, navegación,
geodésico, topográfico y de adquisición de tiempo. Otra clasificación se basa en el tipo de
datos proporcionado por el receptor:
código C/A,
código C/A y portadora L1,
código C/A y portadoras L1 y L2,
códigos C/A y P y portadoras L1 y L2,
portadora L1, y
portadoras L1 y L2.
1.4.2 Técnicas de Procesamiento de la Señal
En Geodesia, para aplicaciones en redes con bases largas o en regiones con fuerte
actividad ionosférica, es esencial el uso de las dos portadoras (L1 y L2) y tener acceso al
código P. La técnica normalmente aplicada para conectar la portadora, cuando el AS no
está operativo, es la técnica de la correlación del código, utilizada normalmente para
conectar la portadora L1. Como la portadora L2 tiene modulado sobre ella solamente el
código P, el cual está sujeto al AS, ésta debe ser conectada por una de las varias técnicas

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 15
disponibles: cuadratura de la señal, correlación cruzada, correlación del código cuadrado y
la técnica más reciente denominada P-W. Una breve descripción de cada una de ellas se
desarrolla a continuación.
(a) Correlación del Código
En esta técnica, el receptor compara el código generado por él mismo con el
código recibido del satélite. Para generar el código en el receptor, se necesita conocer el
código generado por el satélite. El código generado en el receptor se desplaza hasta
obtener máxima correlación con el transmitido por el satélite. En cuanto los códigos estén
alineados, un dispositivo interno (code tracking loop) garantiza que los dos códigos
permanezcan alineados. El tiempo necesario para alinear las dos secuencias de códigos es
la medida de tiempo del desplazamiento de la señal desde el satélite hasta el receptor.
Como hay un error de sincronización entre los relojes del receptor y satélite, cuando el
tiempo de propagación se multiplica por la velocidad de la luz, se obtiene como resultado
la llamada seudodistancia, la cual puede ser generada a partir del código C/A o P. La
secuencia del código proporciona la lectura del reloj del satélite en el momento en que un
bit particular se transmite por el satélite.
En una segunda fase, otro dispositivo interno (carrier tracking loop) separa el
código de la portadora para posibilitar la medida de fase y extraer el mensaje de
navegación. Esta técnica se conoce como reconstrucción de la portadora. La señal de la
fase de la portadora del satélite, debidamente demodulada, se confronta con la señal
generada por el oscilador del receptor. La observación resultante es la fase de barrido de la
portadora, que es la fase relativa entre la señal recibida y la generada por el oscilador del
receptor. Un receptor que utilice esta técnica puede generar observaciones de
seudodistancia, fase de barrido de la portadora y variación de la fase de la portadora (L1)
(Doppler), aparte de extraer los mensajes de navegación.
Esta técnica sólo puede ser aplicada en la portadora L2 cuando el AS no esté
activado o para usuarios con acceso al código P criptografiado (código Y).
(b) Cuadratura de la Señal
En esta técnica, las señales recibidas en el receptor se multiplican por ellas mismas,
generando una segunda portadora. Los códigos y mensajes de navegación se pierden y la
señal resultante es una onda senoidal de frecuencia dos veces la original y una razón señal
ruido mayor. La ventaja de esta técnica es que no necesita el conocimiento del código, lo
que la hace adecuada para conectar la portadora L2 cuando el AS está activado.
La pérdida del mensaje de navegación exige el uso de efemérides y correcciones de
los relojes de los satélites, obtenidas a partir de fuentes externas. La solución de este
problema exige el uso del código C/A, presente en la portadora L1, a partir de la cual se

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 16
obtiene la seudodistancia y la fase de la portadora, así como los mensajes de navegación.
Usando la cuadratura de la señal se obtiene la fase de la portadora L2. La detección de
pérdidas de ciclos y outliers (puntos fuera de rango), normalmente es más difícil sobre
datos obtenidos con receptores usando la cuadratura de la señal sobre L2, que usando la
correlación del código.
(c) Correlación Cruzada
La técnica de la correlación cruzada es una opción disponible en algunos
receptores del fabricante Trimble. Éstos cambian automáticamente el modo de operación
cuando el AS se activa, es decir, pasan de la técnica de correlación del código a la de
correlación cruzada. Usando esta técnica, se producen cuatro observaciones: dos medidas
de fase de la onda portadora y dos seudodistancias. Las medidas de fase de la onda
portadora se producen con la longitud de onda igual a la original y las seudodistancias
surgen del código C/A y del código Y, este último vía correlación cruzada.
Esta técnica se basa en el hecho de que el código Y en L1 y L2 es idéntico, aunque
no necesariamente conocido. El atraso debido a la ionosfera hace que la señal L1 alcance
la antena antes que la señal L2. Observando lo que hay en la señal L1, se puede utilizar tal
información para correlacionar con la señal L2 que llega un poco más tarde. De esta
forma, el código Y de la señal L1 se alimenta por un dispositivo en el receptor (variable
feed back loop) hasta que haya correlación con el código Y de la portadora L2. El atraso
que se da es equivalente a la diferencia entre las seudodistancias que serían generadas a
partir del código P en L1 y L2, en caso de que estuviesen disponibles. Este valor se suma a
la seudodistancia generada a partir del código C/A para generar la seudodistancia en L2.
Después de correlacionar las dos señales, éstas quedan alineadas con precisión y pueden
restarse de las portadoras, generando la portadora L2 con longitud de onda igual a la
original, o sea, 24 centímetros (Talbot, 1992).
(d) Correlación del Código con Cuadratura de la Señal
Esta técnica aprovecha el hecho de que la mayoría del código Y se compone del
código P. Correlacionando el código Y en L2 con una réplica del código P y usando
técnicas de filtrado es posible medir la seudodistancia en la portadora L2. La señal es
ahora cuadrada para obtener la portadora L2, con longitud de onda dos veces inferiores a
la original.
(e) Técnica P-W (P-W Code Tracking)
Esta técnica fue desarrollada por la casa Ashtech. El código Y puede ser dividido
en dos componentes: el código P original, y el código W, este último utilizado en el
criptografiado del código P. La técnica P-W, tal como la de la correlación cruzada, supone
que el código Y es el mismo en las portadoras L1 y L2. Además de esto, se aprovecha el

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 17
conocimiento de que el código W es generado en una frecuencia mucho más baja (50 bps)
si se compara con la del código P. Una réplica del código P se correlaciona con el código
Y (P-W) y usando procesos de filtrado de señal, las señales en L1 y L2 pueden ser
comparadas, permitiendo evaluar el valor del código W, el cual es eliminado, dejando sólo
el código P. Esta técnica proporciona tres seudodistancias (C/A, Y1 e Y2) y dos medidas
de fase de la onda portadora (L1 y L2) ambas con longitud de onda igual a la original
(Ashjaee y Lorenz, 1992).
1.4.3 Evolución de Receptores GPS
El primer receptor para fines geodésicos fue introducido en el mercado en 1982. Se
trata del Macrometer V1000, desarrollado con el soporte financiero de la NASA (National
Aeronautics and Space Administration). Es un receptor de frecuencia simple, que rastrea
hasta 6 satélites a partir de 6 canales paralelos, usando la técnica de la cuadratura de la
señal. De esta forma, se pierden las informaciones de las efemérides y relojes de los
satélites, necesitando de una fuente externa para obtener las efemérides. La precisión de
bases de 100 Km, obtenida con este equipo, fue del orden de 1 a 2 ppm. En 1985, fue
introducida una nueva versión del V1000, denominado Macrometer II, el cual es un
receptor de doble frecuencia. Paralelamente, el DMA (Defense Mapping Agency) en
cooperación con el USGS (U.S. Geological Survey) y NGS (U.S. National Geodetic
Survey) desarrollaron especificaciones para un receptor portátil de doble frecuencia, con
correlación del código. Esto dio origen a un receptor múltiplex, con capacidad de rastrear
hasta 4 satélites, denominado TI-4100, desarrollado por la Texas Instrumentos Company e
introducido en el mercado en 1984. Este fue el primer receptor que proporcionaba todas
las observaciones de interés para los geodéstas, topógrafos, cartógrafos y navegantes, o
sea: seudodistancias a partir del código P en L1 y L2, así como a partir del código C/A en
L1 y fase de las portadoras L1 y L2. El equipo fue extensamente utilizado, dando lugar a
que la mayoría de los resultados publicados entre 1985 y 1991 están basados en datos
recogidos con el TI4100.
El desarrollo de los receptores disponibles actualmente ha estado especialmente
influenciado por la tecnología aplicada en los dos ejemplos citados. La mayoría de los
modelos comenzó con receptores de frecuencia simple (L1 - correlación del código C/A)
con capacidad de rastrear sólo 4 satélites. En un segundo momento, la opción de la
portadora L2 fue ampliada usando la técnica de cuadratura de la señal y el número de
posibles satélites rastreados aumentó simultáneamente. El paso siguiente, alrededor de
1992, fue la inclusión del código P en L2, e incluso en L1, intentando mejorar la calidad
de la portadora L2. Con la aproximación de la activación permanente del AS, alrededor de
1993, los fabricantes pasaron a desarrollar técnicas más avanzadas, con el objetivo de

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 18
obtener la portadora L2 con longitud de onda original (Correlación cruzada, Técnica P-W,
etc.).
Actualmente, hay una gran cantidad de receptores disponibles en el mercado, con
los más variados precios, configuraciones y para las más diversas aplicaciones. Para
hacerse una idea de ello basta consultar revistas especializadas.
El usuario GPS, al definir el equipo a adquirir, debe prestar bastante atención a las
especificaciones de los equipos. En la mayoría de los casos, gran parte de los accesorios
que aparecen en los folletos, son opcionales, elevando sobremanera el precio presentado
por las casas comerciales. La precisión que consta en los folletos no siempre es alcanzada,
dependiendo de condiciones especiales. Es aconsejable que los usuarios, no
acostumbrados a la nomenclatura y terminología relacionada con el GPS, consulten con
especialistas para ayudar en la decisión sobre el equipo a adquirir.
1.5 El Mensaje de Navegación GPS. Cálculo de las Coordenadas de los
Satélites
Para determinar la posición del receptor en el modo de navegación, el usuario debe
tener acceso a las posiciones de los satélites en tiempo real, así como del sistema de
tiempo del satélite. Estas informaciones son conseguidas a través de las señales de los
satélites GPS, que contienen las efemérides transmitidas. Para usuarios que no necesiten
de posición instantánea, pero sí de alta precisión, existe la opción de acceder, vía Internet,
a las efemérides posprocesadas, denominadas efemérides precisas, son producidas por
diversos centros de análisis que componen el IGS. Mientras las efemérides transmitidas
son referenciadas al WGS84, en la estimación de las efemérides precisas se adopta uno de
los ITRFs. No obstante, con el refinamiento del WGS84, ambos son compatibles a nivel
decimétrico.
El procedimiento para la producción de las efemérides transmitidas se compone de
dos etapas. Primeramente se producen las efemérides de referencia para un período de 7
días de observaciones recogidas en las 5 estaciones monitoras. Se trata de un
procesamiento -off-line- usando programas de ordenador apropiados. En la segunda etapa,
las discrepancias entre las observaciones obtenidas en las estaciones monitoras y las
efemérides de referencia son derivadas y procesadas utilizando el algoritmo de filtrado
Kalman para predecir las correcciones de las efemérides de referencia. Este procedimiento
-on-line- comprende las observaciones de seudodistancias y Doppler integrado de todos
los satélites visibles en las estaciones monitoras, las cuales son corregidas de la refracción
ionosférica y troposférica y de los efectos relativistas. Los resultados obtenidos en el
filtrado Kalman permiten corregir las efemérides de referencia y generar las transmitidas
con un polinomio que representa el comportamiento del reloj del satélite.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 19
1.5.1 Representación de las Órbitas de los Satélites
Las posiciones de los satélites, estimadas en el filtrado Kalman, son representadas
en forma de elementos Keplerianos complementados con los parámetros que representan
la perturbación de cada elemento. Un sumario de todos los parámetros que describen la
órbita y reloj del satélite se presenta en la Tabla 1.2. Los parámetros de las efemérides y
relojes se refieren respectivamente a una época origen (toe) y (toc). Son válidos para un
intervalo de tiempo de aproximadamente dos horas antes y dos horas después del
momento origen. A cada 60 minutos los datos son actualizados, causando pequeños
escalones en las conexiones entre los diferentes parámetros. Un proceso de suavización
(smoothing), usando técnicas de aproximación, tal como polinomio de Chebyshev, debe
utilizarse para la reducción de los escalones, los cuales pueden alcanzar algunos
decímetros (Seeber, 1993).
El listado de los parámetros de la Tabla 1.2, se usa para calcular el tiempo GPS de
cada satélite, así como sus coordenadas. El primer grupo de parámetros se usa para
corregir el tiempo del reloj del satélite y el segundo para determinar la elipse kepleriana en
el momento de referencia (toe). El tercer grupo contiene los nueve parámetros
perturbadores de la órbita normal. El significado de cada término está detallado en la
figura 1.7.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 20
Parámetros de tiempo
toe
toc
a0,a1,a2 IOD
Tiempo origen de las efemérides
Tiempo origen del reloj
Coeficientes del polinomio para corrección del reloj del
satélite
Emisión de los datos – Antigüedad de efemérides
unidad
s
s
s,s/s,s/s2
Elementos Keplerianos
a
e
I0
0
w
M 0
Raíz cuadrada del semieje mayor
Excentricidad de la órbita
Inclinación de la órbita en el toe
Ascensión recta del nodo ascendente en el toe
Argumento del perigeo
Anomalía media en el toe
unidad
m1/2
Adimensiona
l
rad
rad
rad
rad Parámetros
Perturbadores
n
ϊ
Cus
Cuc
Cis
Cic
Crs
Crc
Corrección al movimiento medio calculado
Variación temporal de la ascensión recta
Variación temporal de la inclinación
Amplitud del término armónico seno de corrección del
argumento de latitud Amplitud del término armónico coseno de corrección del
argumento de latitud Amplitud del término armónico seno de corrección de la
inclinación de la órbita Amplitud del término armónico coseno de corrección de la
inclinación de la órbita Amplitud del término armónico seno de corrección del
radio vector Amplitud del término armónico coseno de corrección del
radio vector
unidades
rad/s
rad/s
rad/s
rad
rad
rad
rad
m
m
Tabla 1.2: Definición de elementos de las Efemérides Transmitidas
Crc,Crs
Cuc,Cus
Cic,Cis
toe
Perigeo
Ecuador
i0
i
M0
n
vk
Órbita (a,e)X
Y
Z
Fig. 1.7: Parámetros de la Órbita GPS contenidos en las Efemérides Transmitidas

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 21
1.5.2 Cálculo de las Coordenadas de los Satélites
a) Tiempo de Transmisión en la Escala de Tiempo GPS
El tiempo GPS, conservado por relojes atómicos, se caracteriza por el número de
la semana GPS (contada a partir de la media noche (TUC) de 5 a 6 de enero de 1980) y el
número de segundos desde el inicio de la semana en cuestión, que varía de 0 segundos
(inicio de la semana) a 604800 segundos (fin de la semana). El sistema de tiempo GPS se
define por el reloj principal en la Estación de Control Maestra (Master Control Station).
Los relojes de los satélites difieren del sistema de tiempo GPS, debido a errores inherentes
a ambos sistemas (relojes de los satélites y tiempo GPS), pero, principalmente, en razón de
los errores en los osciladores de los satélites. El comportamiento de cada oscilador
(Rubidium o Cesium) se monitoriza por el segmento de control y se predice en forma de
un polinomio de segundo grado. Los coeficientes del polinomio son transmitidos con los
mensajes de navegación, los cuales forman parte del primer grupo de parámetros de la
Tabla 1.2. El tiempo de transmisión de la señal, en la escala de tiempo de un satélite
cualquiera, tt
s, debe ser trasladado a la escala de tiempo GPS, o sea:
t t tGPS t
s s (1.3)
donde:
t a a t t a t ts
GPS o GPS oc c 0 1 2
2( ) ( ) (1.4)
y toc es el momento de referencia para los coeficientes a0, a1 y a2. El valor de tGPS en la
expresión anterior puede ser sustituido por tt
s, prácticamente sin afectar a la precisión de
los resultados.
Las coordenadas de un satélite k (Xk, Y
k, Z
k), dadas en el sistema de coordenadas
mostrado en la Figura 1.7 (WGS84), se calculan para un determinado instante tGPS. El
término tk, que representa el tiempo transcurrido desde el momento de origen de las
efemérides toe, viene dado por:
t t tk GPS oe (1.5)
También hay que considerar un posible cambio de semana.
Resta decir como se obtiene el tiempo tt
s. Para responder a esta cuestión, se debe
partir del tiempo de recepción de la señal, registrado por el receptor, o sea tr. Se trata de
otra escala de tiempo, diferente de la escala de tiempo GPS. Entonces se tiene:
t tt
s
r (1.6)
donde es el tiempo de propagación de la señal entre el satélite, en el instante de
transmisión, y el receptor, en el instante de recepción tr. Aunque algunos detalles sobre el

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 22
cálculo de tiempo de propagación de la señal serán presentados posteriormente, basta
citar una forma, un tanto simple, para su obtención. Se trata de la conocida expresión:
cSD (1.7)
donde SD es la seudodistancia observada (próximo capítulo) y c, la velocidad de la luz en
el vacío. Errores inherentes a la SD, desembocarán en errores en la obtención del tiempo
de propagación.
b) Anomalía Verdadera
Una vez obtenido el tGPS que interesa, resta aún definir tres constantes
comprendidas en el cálculo de las coordenadas de los satélites; las cuales son:
8981415926535,3
/x102921151467,7
/10986005,3
5-
2314
srad
smxGM
e (1.8)
con GM la constante gravitacional y e la velocidad de rotación de la Tierra, ambos en el
WGS84.
De la tercera Ley de Kepler se tiene:
n GM a0
3 (1.9)
que es el movimiento medio calculado, donde a es el semieje mayor de la órbita del
satélite. Se puede obtener ahora:
n n n
M n tk
0
0
Mk
(1.10)
siendo n el movimiento medio corregido y Mk
la anomalía media.
De la ecuación de Kepler de la anomalía excéntrica se tiene:
E M e Ek K k sen( ) (1.11)
Esta ecuación debe ser resuelta iterativamente. Normalmente, es suficiente con una
sola iteración.
La anomalía verdadera se obtiene, finalmente, por una de las dos ecuaciones
siguientes:
cos( ) (cos( ) ) ( cos( ))
sen( ) sen( ) ( cos( ))
v E e e E
v e E e E
k k k
k k k
1
1 12 (1.12)

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 23
c) Coordenadas Planas del Satélite
Las coordenadas planas del satélite posicionan al satélite dentro del plano orbital.
Se trata de un sistema de referencia bidimensional dextrogiro, con origen en el centro de
masas de la Tierra. El eje x se orienta positivamente hacia el nodo ascendente, conforme
se ilustra en la figura 1.8.
Las coordenadas planas del satélite se calculan utilizando las ecuaciones (1.13) a
(1.16):
u
k
k k
k k
k uc k us k
u
v w
u C C sen
cos( ) ( )2 2
(1.13)
- uk: argumento de la latitud corregida
- k
: argumento de la latitud
- uk: corrección del argumento de la latitud
r a e E r
r C C sen
k k k
k rc k rs k
( cos( ))
cos( ) ( )
1
2 2
(1.14)
- rk: radio vector corregido
- rk
: corrección de la inclinación
i i i t i
C C sen
k k k
ic k is k
0
2 2
cos( ) ( )
i k
(1.15)
-ik : inclinación corregida
-ik
: corrección de la inclinación.
x r u
y r u
k k k
k k k
cos( )
sin( ) (1.16)
- xk e y
k: posición en el plano orbital.
Perigeo
Nodo
Ascendente
Geocentro
v k
uk
xk
yk
x
y
Figura 1.8: Coordenadas planas del Satélite

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 24
d) Coordenadas Terrestres (WGS84) del Satélite
Los valores obtenidos con la expresión (1.16) posicionan al satélite en el plano
orbital. Resta ahora transformar las coordenadas planas del satélite en un sistema
tridimensional, geocéntrico y fijo a la Tierra, denominado WGS84. La Figura 1.9, muestra
los parámetros implicados en la transformación, así como los sistemas de referencia
comprendidos.
Equador
X
Y
Z
y
iX (0 Hs GPS)
Nodo ascendente( toe
)
Nodo ascendente ( tGPS
)GPS )
e
0
t k
Geocentro
Figura 1.9: Coordenadas Terrestres del Satélite
La longitud corregida del nodo ascendente, como puede verificarse en la figura 1.9,
viene dada por:
k k e GPS
t w t 0
(1.17)
Las coordenadas terrestres del satélite son obtenidas, finalmente, a partir de las
expresiones:
X x y sen i
Y x sen y i
Z y sen i
k
k k k k k
k
k k k k k
k
k k
cos( ) ( )cos( )
( ) cos( )cos( )
( )
(1.18)
Se puede verificar que el conjunto de expresiones (1.18) resulta de la aplicación de
las rotaciones R R iZ k X k( ) ( ) sobre el vector de las coordenadas planas del satélite, o
sea: x yk k
T
0 .

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 25
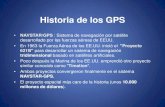
La figura 1.10 muestra las coordenadas de un satélite (PRN 6) para un determinado
día, comprendiendo un período de aproximadamente 24 horas. Se reflejan, también, en
esta figura, los errores t (en milisegundos) del reloj del satélite. Queda a juicio del lector
interpretar los gráficos mostrados.
103500 121500 139400 157400
-30000
-20000
-10000
0
10000
20000
30000
Tiempo en Segundos
Y(km)
103500 121500 139400 157400
-30000
-20000
-10000
0
10000
20000
30000
Tiempo en Segundos
X(km)
103500 121500 139400 157400-30000
-20000
-10000
0
10000
20000
Tiempo en Segundos
Z(km)
103500 121500 139400 15740019,95
20,00
20,05
20,10
20,15
error del reloj
Tiempo en Segundos
t(ms)
Figura 1.10: Coordenadas y Errores del Reloj del Satélite (PRN 6)
1.5.3. Estructura del Mensaje de Navegación
Los datos de navegación GPS, denominado mensaje, modulan la portadora en el
rango de 50 bps, con duración de 30 segundos. De esta forma, las informaciones
contenidas en un mensaje completan un total de 1500 bits, denominado cuadro de datos
(data frame). Este se divide en 5 subcuadros de seis segundos de duración (300 bits),
conteniendo 10 palabras de 30 bits cada una. El contenido de cada subcuadro se presenta
en la tabla 1.3.
Sub-cuadro 1
- Coeficientes para la corrección del reloj del satélite
- Varias banderas (flags)
- Número de la semana GPS y estado del satélite
- Edad de los datos
Sub-cuadros 2 y 3 - Parámetros orbitales
Sub-cuadro 4
- Almanaque para los satélites 25 a 32 (páginas 2, 3, 5, 7 8, 9 y 10)
- Modelo de Ionosfera y diferencia de tiempo GPS-UTC (pági. 18)
- Bandera de antifraude y configuración de 32 satélites
- Estado de los satélites 25-32 (página 25)
- Páginas reservadas y de mensajes especiales
Sub-cuadro 5 - Almanaque de los satélites 1 a 24 (páginas 1 a 24)
- Estado de los satélites 1 a 24 (página 25)

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 26
Tabla 1.3: Contenido de los subcuadros del Mensaje de Navegación
Los datos de los subcuadros 1 a 3 se repiten en los cuadros siguientes hasta que los
datos sean renovados. Sin embargo, los subcuadros 4 y 5, cada uno con 25 páginas,
contienen datos diferentes en cada cuadro, teniendo en cuenta que cada cuadro contendrá
una de sus páginas. Como cada cuadro tiene duración de 30 segundos, la obtención
completa del contenido de los subcuadros 4 y 5 durará 12,5 minutos. La figura 1.11
muestra el esquema de la estructura de un cuadro.
La duración de 1 bit de mensaje es de 20 milisegundos. Durante este período, los
códigos C/A (1023 Mbps) y P (10230 Mbps) se repiten 20 veces y el número de repetición
de ciclos de la portadora L1 es 31508400 (Wells et al, 1986).
En el inicio de cada subcuadro aparecen dos palabras especiales, denominadas
palabra de telemetría (TLM) y palabra auxiliar HOW (hand-over word). Cuando los
mensajes son enviados a los satélites, o esté ocurriendo otra operación, la palabra TLM se
altera. La palabra HOW contiene un número que, multiplicado por 4, proporciona el
contador Z (Z-count) del próximo subcuadro. El contador Z se expresa en unidades de 1,5
segundos, contados a partir del inicio de la semana GPS y con duración de una semana, o
sea de 0 a 403199. El contador Z se usa para auxiliar en la adquisición del código P.
1 2 3
4 5
1 2 3 4 5 6 7 8 9 10
30 Segundos
6 Segundos
0,6 Segundos
0,02 Segundos
01 CUADRO :
05 SUBCUADROS
01 SUBCUADRO:
10 Palabras
01 Palabra:30 BITS
SUBCUADROS 4 Y 5Contiene 25 Páginas
Figura 1.11: Estructura de un cuadro de mensajes GPS
1.5.4 Mensajes de Navegación en el Formato RINEX
La lectura de los mensajes descritos arriba, así como de las observaciones, se
realiza en cada receptor, usando su propio formato binario. Para facilitar el intercambio de
datos, se desarrolló el formato RINEX (Receiver INdependent EXchange format), el cual
consta de tres archivos en código ASCII, los cuales son: archivo de observaciones, datos

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 27
meteorológicos y mensajes de navegación. La mayoría de los receptores geodésicos
facilita programas para efectuar la conversión de datos al formato RINEX. Los parámetros
de las efemérides transmitidas (tabla 1.2), en el formato RINEX, siguen el patrón
mostrado en la tabla 1.4. Un ejemplo de archivo de navegación RINEX se muestra en la
tabla 1.5.
DESCRIPCIÓN DEL ENCABEZAMIENTO
IDENTIFICACIÓN DESCRIPCIÓN FORMATO
RINEX VERSIÓN/TYPE - Versión 2/Archivo tipo ‘N’ para Navegación I6, 14X/A1, 19X
PGM/RUN BY/DATE Nombre del programa creando el archivo,
Nombre de la Institución, Fecha de creación A20, A20, A20
*COMMENT Línea para comentario A60
*ION ALPHA Parámetros del modelo de la Ionosfera A0-A3 2X,4D12.4
*ION BETA Parámetros del modelo de la Ionosfera B0-B3 2X, 4D12.4
*DELTA-UTC:
A0,A1,T,W
Parámetros para calcular tiempo en UTC,
A0 y A1: términos del polinomio,
T : Momento de referencia para UTC
W : Número de semana UTC de referencia
3X, 2D19.12, 2I9
*LEAP SECONDS Salto de segundos I6
END OF HEADER Último registro del encabezamiento 60X
DESCRIPCIÓN DE LOS REGISTROS
PRN/EPOCH/SV CLK Número del satélite, Momento del reloj (año, mes,
día, hora, minuto, segundos), a0,a1,a2 I2,5I3,F5.1,3D19.12
IODE, Crs, n, M0
Emisión de los datos, amplitud del término armónico
seno de corrección del radio vector, corrección al
movimiento medio, anomalía media a toe
3X,4D19.12
Cuc,e,Cus,sqrt(a)
Amplitud del término armónico coseno del
argumento de la latitud, excentricidad, amplitud
del término armónico seno del argumento de la
latitud, raíz cuadrada del semieje mayor
3X, 4D19.12
Toe, Cic, 0, Cis
Tiempo origen de las efemérides, amplitud del
término armónico coseno de corrección de la
inclinación, ascensión recta en el toe, amplitud del
término armónico seno de corrección de la
inclinación.
3X, 4D19.12
i0, Crc, w,
Inclinación de la órbita en el toe, amplitud del
término armónico coseno de corrección del radio
vector, argumento del perigeo, variación temporal
de la ascensión recta
3X, 4D19.12
i , Codes on L2 channel,
GPS Week, L2 P data flag
Variación temporal de la inclinación, códigos del
canal L2, semana GPS, L2 P data flag 3X, 4D19.12
SV accuracy, SV health,
TGD, IODC
Fiabilidad del satélite, estado del satélite, TGD,
edición de datos del reloj 3X, 4D19.12
Transmission time of
message, spare, spare, spare
Tiempo de transmisión del mensaje en segundos
de la semana GPS, reserva, reserva, reserva 3X, 4D19.12
* Se trata de informaciones opcionales
Tabla 1.4: Descripción del Mensaje de Navegación en Formato RINEX

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 28
2 NAVIGATION DATA RINEX VERSION / TYPE
TRIMVEC unesp 210598 PGM / RUN BY / DATE
COMMENT
.4657D-08 .1490D-07 -.5960D-07 -.1192D-06 ION ALPHA
.7782D+05 .4915D+05 -.6554D+05 -.2621D+06 ION BETA
END OF HEADER
1 98 2 16 16 0 0.0 0.504018273205E-03 -0.181898940355E-10 0.000000000000E+00
0.330000000000E+02 0.360937500000E+02 0.503806699857E-08 0.191264392402E+01
0.191293656826E-05 0.330301886424E-02 0.854954123497E-05 0.515375778008E+04
0.489600000000E+06 0.335276126862E-07 0.598418118379E+00 0.108033418655E-06
0.954468119303E+00 0.211843750000E+03 -0.142578545872E+01 -0.814533928608E-08
0.593953311968E-09 0.000000000000E+00 0.840000000000E+03 0.000000000000E+00
0.000000000000E+00 0.000000000000E+00 0.139698386192E-08 0.330000000000E+02
0.484980000000E+06 0.000000000000E+00 0.000000000000E+00 0.000000000000E+00
9 98 1 16 14 0 0.0 -0.827806070447E-05 -0.136424205266E-11 0.000000000000E+00
0.210000000000E+03 0.446562500000E+02 0.466733727047E-08 0.142066625046E+01
0.242143869400E-05 0.451862346381E-02 0.106934458017E-04 0.515361136818E+04
0.223200000000E+06 0.149011611938E-07 0.212714449659E+01 0.707805156708E-07
0.946529342724E+00 0.163437500000E+03 -0.601707671083E-01 -0.798747556756E-08
-0.490734726785E-09 0.000000000000E+00 0.836000000000E+03 0.000000000000E+00
0.000000000000E+00 0.000000000000E+00 0.139698386192E-08 0.210000000000E+03
0.219600000000E+06 0.000000000000E+00 0.000000000000E+00 0.000000000000E+00
Tabla 1.5: Mensaje de navegación de los Satélites 1 y 9 en RINEX
1.6 Impacto de la Disponibilidad Selectiva y Anti-Fraude
Ya se citó en la sección 1 respecto a la limitación de la fiabilidad del sistema GPS
vía disponibilidad selectiva (SA: Selective Availability) y del anti-fraude (AS: Anti-
Spoofing). Estos dos tipos de limitación de la fiabilidad del sistema fueron implementados
en los satélites del Bloque II. La disponibilidad selectiva fue activada el 4 de julio de 1991
a las 4 horas TU. El AS fue activado intermitentemente durante el año 1993 e
implementado a 31 de enero de 1994. Se trata de una reducción provocada del nivel de
exactitud del GPS, de modo que el SPS (Standard Positioning Service) disponible para los
usuarios no autorizados sea del orden de 100 metros, con un nivel de confianza del 95%.
Esto significa que la exactitud de la posición horizontal de un usuario posicionándose de
forma absoluta será del orden de 100 metros o mejor, durante el 95% del tiempo.
Se esperaba que sólo el AS sería suficiente para proporcionar la limitación en el
nivel de fiabilidad. Sin embargo, el posicionamiento con el código C/A mostró una
exactitud del orden de 20 a 40 metros. Esta inesperada situación disparó el programa
llamado disponibilidad selectiva (SA), para ser incorporado en los satélites del Bloque II.
Dos efectos forman parte de la SA:
* manipulación de las efemérides transmitidas ( técnica ), y
* desestabilización sistemática del oscilador del satélite (técnica ).
El impacto de la SA sobre los usuarios civiles ha sido motivo de muchas
discusiones entre usuarios GPS y se realizaron varias pruebas para evaluar su efecto. Hay

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 29
un aumento en el ruido del código y de la onda portadora. Los efectos de la técnica
pueden provocar efectos sistemáticos en la escala y orientación de una base, en caso de
que la sesión de observación no sea lo suficientemente larga como para eliminar el efecto
de la perturbación de la órbita. La técnica provoca un efecto adverso en la detección y
solución de pérdidas de ciclos para medidas no diferenciadas. El efecto es prácticamente
eliminado en la diferenciación, al no depender de la geometría de los satélites. Para
navegación, el uso de DGPS (Differential GPS) o WADGPS (Wide Area Differential
GPS) prácticamente eliminan los efectos de la SA. Actualmente, desde mayo de 2000, se
encuentra eliminada la SA, presumiblemente, dentro de un período de 4 a 10 años, lo que
va a favor de las aspiraciones de la comunidad de usuarios. Vale la pena citar que el
sistema ruso, similar al GPS, denominado GLONASS, se encuentra en plena operación,
sin las desventajas de SA y AS del GPS. Claramente, es un rival en potencia para el GPS,
o bien, pueden favorecer las observaciones conjuntas.
El AS se refiere a la denegación de acceso al código P. Para ello, el código P se
criptografía, resultando un código protegido, denominado Y. Solamente los usuarios
autorizados tienen acceso al código P cuando el AS está activado. El objetivo primordial
del AS es evitar que usuarios no autorizados puedan generar códigos P falsos,
interfiriendo en el uso militar del sistema. El código Y es la resultante de una combinación
de los códigos P y W. Este último se genera en una razón de 50 bps (bits por segundos),
mientras que el código P presenta una razón de 10,23x106 bps.
1.7 Desarrollo del sistema
El GPS fue declarado operativo el 27 de abril de 1995. En aquella época, había 25
satélites en órbita, 1 del Bloque I (satélite 12) y los demás del Bloque II. El satélite 12 fue
inutilizado a finales de 1995, después de declararse apto varias veces, aunque, con algunos
problemas. De acuerdo con los decretos de decisión del Presidente de los Estados Unidos
al respecto del GPS, la SA esta desactivada dentro de la próxima década. En estos
decretos, quedó también asegurada la continuidad del GPS globalmente, sin el cobro de
tasas directas. Otro aspecto importante fue la decisión de desarrollar e implementar la
ampliación del GPS a fin de que el mismo sea utilizado con normas concretas para
sistemas de transportes, ya sea americano o internacional. La Tabla 1.6 muestra la
situación de los satélites GPS en 1998.
El primer satélite del Bloque IIR (reabastecimiento) es lanzado en agosto de 1996.
A finales de julio de 1996 es lanzado un satélite más del Bloque IIA, en la posición orbital
E3, para substituir al SVN16 (PRN16).
La generación de satélites que substituirá a los del Bloque IIR será denominada
IIF, constará de 33 satélites. El programa de producción de satélites se encuentra en fase

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 30
de estudio y representará un compromiso del gobierno americano para tener disponible el
GPS por un período de 20 a 30 años.
SECUENCIA DE
LANZAMIENTO SVN
Código
PRN
FECHA DE
LANZAMIENTO
POSICIÓN EN EL
PLANO ORBITAL SITUACIÓN
SATÉLITES DEL
BLOQUE I
I-1
I-2
I-3
I-4
I-5
I-6
I-7
I-8
I-9
I-10
I-11
01
02
03
04
05
06
07
08
09
10
11
04
07
06
08
05
09
11
13
12
03
02/78
05/78
10/78
12/78
02/80
04/80
07/83
06/84
09/84
10/85
C3
C1
A1
C4
DESACTIVADO 07/85
DESACTIVADO 07/81
DESACTIVADO 05/92
DESACTIVADO 10/89
DESACTIVADO 11/83
DESACTIVADO 03/91 FALLO DE LANZAMIENTO
DESACTIVADO
DESACTIVADO
DESACTIVADO
DESACTIVADO
DESACTIVADO
SATÉLITES DEL
BLOQUE II
II-1
II-2
II-3
II-4
II-5
II-6
II-7
II-8
II-9
14
13
16
19
17
18
20
21
15
14
02
16
19
17
18
20
21
15
02/89
06/89
08/89
10/89
12/89
01/90
03/90
08/90
10/89
E1
B3
E3
A4
D3
F3
B2
E2
D2
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
SATÉLITES DEL
BLOQUE IIA
II-10
II-11
II-12
II-13
II-14
II-15
II-16
II-17
II-18
II-19
II-20
II-21
II-22
II-23
II-24
II-25
23
24
25
28
26
27
32
29
22
31
37
39
35
34
36
33
23
24
25
28
26
27
01
29
22
31
07
09
05
04
06
03
11/90
07/91
02/92
04/92
07/92
09/92
11/92
12/92
02/93
03/93
05/93
06/93
08/93
10/93
03/94
05/96
E4
D1
A2
C2
F2
A3
F1
F4
B1
C3
C4
A1
B4
D4
C1
C2
OPERATIVO
OPERATIVO
OPERATIVO OPER./Subst. p/ SVN 33
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
OPERATIVO
Tabla 1.6: Situación de los Satélites GPS (1997)

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 31
2. SISTEMAS DE REFERENCIA
2.1. Introducción
El posicionamiento con GPS requiere Sistemas de Referencia bien definidos y
consistentes para modelar las observables, describir las órbitas de los satélites y
representar, interpretar y transformar los resultados. La precisión de tales sistemas debe
ser compatible con el sistema de posicionamiento utilizado. De otra forma, los resultados
se deteriorarán, y la alta precisión proporcionada por el sistema de posicionamiento o
referencia no tendrá valor.
En el posicionamiento con satélites, los sistemas de referencias utilizados son, en
general, globales y geocéntricos, téngase en cuenta que el movimiento de los satélites es
alrededor del centro de masas de la Tierra. Las estaciones terrestres son, normalmente,
representadas en un sistema fijo a Tierra que rota con la misma, y el movimiento del
satélite se describe mejor en un sistema de referencia inercial. Para reproducir
adecuadamente los observables, es esencial que las posiciones de los satélites y estaciones
terrestres sean representadas en el mismo sistema de referencia, de esta forma, la relación
entre ambos debe ser bien conocida.
Figura-: Superficies de Referencia
Hay que tener en cuenta que la gran mayoría de los levantamientos ejecutados
hasta ahora están referidos a sistemas locales, tal como la mayoría de los documentos
cartográficos. En el caso de España, el Sistema de Referencia adoptado (ED50: European
Datum del año 1950), coincide con el Sistema de Referencia Europeo, el cual no es
geocéntrico. Por tanto, es necesario conocer la relación matemática entre los sistemas
locales y los utilizados en posicionamiento con satélites. La tendencia mundial se inclina
hacia la adopción de un sistema geocéntrico, no sólo para fines geodésicos, sino también
para fines cartográficos, geofísicos u otros.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 32
Figura-: Punto Fundamental
La definición de un sistema de referencia se caracteriza por la idea conceptual del
mismo. Tal definición puede ser bastante complicada, pues conlleva factores relacionados
con la deformación de la Tierra a nivel global, regional y local, aparte de otros aspectos.
Hace falta, además de la definición de un sistema de referencia, la teoría fundamental que
conlleva y los patrones adoptados. Por otro lado, la realización viene dada por una red de
puntos o vértices, perfectamente distribuidos por el Territorio, con sus respectivas
coordenadas. Un sistema de referencia para geodesia espacial y geodinámica se define
para una época particular. Según la deformación de la Tierra, los modelos utilizados para
la determinación de la velocidad de las estaciones, basados en modelos de placas o a partir
de medidas de larga duración, también hay que tenerlos en cuenta para la definición de un
sistema de referencia.
2.2. Sistemas de Referencias Convencionales
A través del mensaje de navegación emitido por los satélites de la constelación
NAVSTAR, las efemérides nos ofrecen la posición de los diferentes satélites, definidos en
el plano orbital que, junto con las coordenadas de las estaciones de seguimiento y control
de los satélites en tierra, pueden formar un sistema o marco de referencia donde poder
correlacionar las observaciones.
Con el objetivo de buscar sistemas de referencia ideales, como son los sistemas
inerciales, y dada la imposibilidad de obtenerlos, debido fundamentalmente al campo
gravitatorio donde es necesario aplicar la teoría de la relatividad, se adoptan modelos
físicos para intentar acercarse al máximo a ese sistema ideal. De aquí surgen los sistemas
convencionales, es decir, el CCRS (Convencional Celestial Reference System) que se
relaciona con el sistema de referencia GPS. Evidentemente, como el sistema donde se
efectúan los cálculos es terrestre y además hay que realizar otra transformación al sistema
local, hay que definir un sistema CTRS (Convencional Terrestrial Reference System) para
referenciar los sistemas de coordenadas intervinientes en las transformaciones.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 33
Los sistemas de coordenadas propios de los sistemas Celeste Convencional y
Terrestre Convencional son geocéntricos. El eje X tiene orientación fija en el plano
fundamental y el eje Z, normal a este plano, puede rotar o no. El eje Y, perpendicular a los
anteriores, se define de tal forma que corresponda a una definición de sistema dextrogiro.
En el Sistema de Referencia Convencional Celeste (CCRS: Convencional
Celestial Reference System) el eje Xc, señala hacia el Equinocio Vernal medio a las 12
horas TDB (Barycentric Dynamical Time ) el 1 de enero del 2000 (Dia Juliano
2451545,0), que corresponde a la época de referencia J2000. El eje Zc señala en la
dirección del Polo Norte Celeste medio para la misma época, y el eje Yc , perpendicular a
los anteriores, completa el sistema dextrogiro. El sistema se realiza mediante un catálogo
de coordenadas ecuatoriales de fuentes de radio extragaláctico (quasares) en la época
J2000, calculada de modo que no presente movimiento propio.
El Sistema de Referencia Terrestre Convencional (CTRS: Convencional Terrestrial
Reference System) se define de la siguiente forma (McCarthy, 1992):
Es geocéntrico, de manera que el centro de masas se define usando toda la Tierra,
incluyendo océanos y atmósfera,
La escala corresponde a la de un sistema de referencia local, considerando los
efectos relativistas de la teoría de la gravitación,
Su orientación se da por el BIH (Bureau International de L`Heure) en la época
1984, y
Su evolución temporal en orientación será la de una red sin rotación.
El CTRS es un sistema fijo a Tierra, es decir, rota con la Tierra. La realización de
este sistema debe ser especificada, preferentemente, en coordenadas cartesianas X, Y, Z.
El eje Z apunta en la dirección del polo terrestre convencional (CIO: Conventional
International Origin. La nueva denominación del CIO es CTP: Conventional Terrestrial
Pole), y el eje X en la dirección media del meridiano de Greenwich. Si fuesen necesarias
coordenadas geodésicas, se recomienda utilizar el elipsóide GRS80 (Global Reference
System de 1980). La realización del CTRS es un catálogo de coordenadas geocéntricas de
estaciones VLBI (Very Long Baseline Interferometry), SLR (Satellite Laser Range) y
GPS. La red se designa ITRF (International Terrestrial Reference Frame: Marco de
Referencia Terrestre Internacional), la cual se mantiene por el IERS (International Earth
Rotation Service). El IERS, basándose en modelos estándares, define el ITRF
correspondiente para una época determinada utilizando los parámetros de transformación
respecto al CCRS y calculando las coordenadas correspondientes en ese momento.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 34
Este sistema CTRS es el calculado y adoptado por las estaciones de control GPS en
tierra y normalmente al que han de referirse las coordenadas obtenidas por los usuarios.
2.2.1. Transformación entre Sistemas Celeste y Terrestre
La transformación del CCRS en el CTRS se efectúa usando una secuencia de
rotaciones que tienen en consideración la precesión, nutación y rotación de la Tierra,
incluyendo el movimiento del polo. La transformación se efectúa a partir de la siguiente
expresión:
X SNPXT c (2.1)
donde X c
y X T
representan, respectivamente, vectores posicionales en los sistemas
celeste y terrestre, y SNP, los valores del movimiento del polo, nutación y precesión,
respectivamente.
a) Precesión y Nutación
El eje de rotación de la Tierra y su plano ecuatorial giran respecto a un sistema
inercial, tal como el CCRS. Tal hecho se debe a la atracción gravitacional de la Luna y del
Sol sobre la protuberancia ecuatorial de la Tierra. Del movimiento total resultante hace
falta una componente principal, secular (precesión), y otra periódica (nutación). La
precesión y nutación se ilustran en la Figura 2.1. Cuando solamente se considera el efecto
de la precesión, se considera el ecuador medio y el punto vernal medio. Se trata, por tanto,
del sistema de referencia denominado Celeste Medio. Cuando también se tiene en cuenta
la nutación se considera el ecuador y el punto vernal verdadero y se trata del sistema de
referencia Celeste Verdadero.
Eclíptica
Ecuador
23, 27
Ps
PnEn
Es
18,6 años
15`,6
ab
a ”,21
b ”
Figura 2.1: Descripción de Precesión y Nutación

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 35
Las posiciones medias en la época de referencia t0 (J2000) pueden ser
transformadas a la época en cuestión utilizando la matriz de precesión, y la transformación
del sistema Celeste Medio en Verdadero a través de la matriz de nutación.
b) Rotación de la Tierra y Movimiento del Polo
La transformación del sistema Celeste Verdadero en Sistema Terrestre
Convencional, requiere parámetros adicionales, a saber: parámetros de rotación de la
Tierra (ERP: Earth Rotation Parameters ) o parámetros de orientación de la Tierra (EOP:
Earth Orientation Parameters). Estos son el tiempo sidéreo aparente de Greenwich y las
coordenadas del polo (xp, yp).
Para las coordenadas del polo, si éstas no son estimadas a partir de las
observaciones, pueden utilizarse los valores publicados por el IERS. En cuanto al tiempo
sidéreo aparente de Greenwich, para una época de observación, se obtienen, sin mayor
problema, a partir de ciertas expresiones.
2.3. Sistema de Referencia del GPS
El sistema de referencia del GPS es el World Geodetic System 1984 (WGS84),
de esta forma, cuando se efectúa una recogida de datos usando el GPS, las coordenadas de
los puntos observados se obtendrán en el mismo sistema de referencia. La figura 2.2
ilustra el WGS84. Su origen es el centro de masas de la Tierra, con los ejes cartesianos X,
Y, Z, idénticos al Sistema de Referencia Terrestre Convencional (CTRS) para la época
1984.0.
ZZ
YY
XX
Centro de Masas
de la Tierra
POLO CIO
MeridianoOrigen
Figura 2.2: Sistema de Referencia del GPS (WGS84)

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 36
El elipsoide de referencia es el GRS80 (Geodetic Reference System 1980), un
elipsoide de revolución equipotencial y geocéntrico. Algunos parámetros relacionados con
este elipsoide aparecen listados en la Tabla 2.1 (Hofmann-Wellenhof et al, 1992).
DESCRIPCIÓN PARÁMETRO
Semieje mayor
Semieje menor
Achatamiento
Velocidad angular de la Tierra
Constante gravitacional de la Tierra
a = 6378137 m
b = 6356752,314 m
f = 1/298,2572221
e = 7292115. 108 rad/s
GM= 3986005. 108 m
3/s
2
Tabla 2.1: Parámetros del Elipsoide WGS84
En la realización del WGS84 se utilizaron 1591 estaciones determinadas por el
DMA (Defense Mapping Agency) utilizando el sistema TRANSIT, con precisión del
orden de 1 a 2 metros. El ajuste se ha efectuado usando la técnica de posicionamiento
GPS, efectuando una nueva realización, la cual es compatible con el ITRF92 a nivel
decimétrico. Esta realización se denomina WGS84 (G730), donde G representa que el
ajuste fue efectuado utilizando GPS y 730 la semana GPS en que fue realizado. Las
efemérides transmitidas por el GPS son referidas al WGS84. Por tanto, como ya se citó,
las coordenadas derivadas también estarán referidas al WGS84. Vale la pena resaltar que
los usuarios que requieran una mayor fiabilidad en los resultados, podrán reprocesar sus
datos usando efemérides precisas, generadas por los diversos centros de análisis que
componen el IGS. En este caso se tendrá como sistema de referencia, uno de los ITRFs.
2.4. El Sistema Geodésico Español
2.4.1. Definición del Sistema
El Sistema Geodésico Español es el ED50 (Europeam Datum de 1950),
materializado físicamente por el RE50 (Red Europea de 1950), se define a partir de un
conjunto de puntos geodésicos implantados en la superficie terrestre delimitada por la
frontera del país. Tal como cualquier otro sistema geodésico de referencia, puede ser
dividido en dos componentes en cuanto a las posiciones horizontal y vertical, compuestos
por los sistemas de coordenadas y superficies de referencia (elipsoide y geoide) y la red de
referencia, monumentadas en estaciones con pilares de construcción, las cuales
representan la realización física del sistema.
La red horizontal (Red Geodésica Nacional Convencional) se compone
aproximadamente de 11000 vértices. La Red Nacional por Técnicas Espaciales está
formada por 1200 estaciones ROI y NAP. La red de nivelación de Alta Precisión, cuenta

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 37
con aproximadamente 12000 Km. de desarrollo y está siendo ajustada actualmente.
También esta la Red Gravimétrica con 90 estaciones en reobservación.
El ED50 tiene como origen el vértice Helmert en Postdam (Alemania) y el elipsoide
adoptado es el Internacional de Hayford, que coincide con la definición del Sistema
Geodésico Europeo. Los parámetros que definen el elipsoide Internacional de Hayford, y
se corresponden con el ED50, son:
- semieje mayor: a = 6378160,0
- achatamiento: f = 1/298,25
La orientación geocéntrica del elipsoide establece que el eje de rotación es paralelo
al eje de rotación de la Tierra y el plano meridiano origen es paralelo al plano meridiano
de Greenwich, tal como define el BIH. La ondulación del geoide en este vértice se
considera nula, es decir, N=0.
Considerando la definición y realización del ED50 y el sistema de referencia del
WGS84, podemos afirmar que se trata de sistemas diferentes. Como las actividades
cartográficas en el territorio Español toman como referencia el ED50, deben aportarse
algunas soluciones para que los resultados obtenidos con el GPS puedan ser utilizados
para fines cartográficos u otras actividades georreferenciadas.
Las coordenadas de los vértices de la red nacional, al ser utilizadas como vértice
base (conocido) para dar soporte a las actividades con GPS deben ser transformadas a
WGS84. Una vez que las redes GPS de puntos se concluya, sus coordenadas estarán
referidas al WGS84, debiendo ser transformadas a ED50, a fin de ser utilizadas en las
actividades cartográficas españolas establecidas.
En España, el Instituto Geográfico Nacional (IGN) es el órgano responsable del
establecimiento y mantenimiento de la red nacional. Los parámetros de transformación
aproximados y preconizados para realizar la transformación de WGS84 a ED50, son los
siguientes:
Tx = -87 metros. Ty = -98 metros. Tz = -121 metros.
Se trata de tres traslaciones, pues los dos sistemas son paralelos y con la misma
escala. Evidentemente, los parámetros de transformación se deben calcular para cada zona
en concreto si lo que se desea es tener precisión en el tipo de trabajo concreto, sin embargo
para muchas aplicaciones estos parámetros serán suficientes.
Sumando los parámetros anteriores a las coordenadas X, Y, Z en WGS84, se
obtienen las respectivas coordenadas en ED50. Para transformar coordenadas de ED50 en
WGS84, basta substraer los parámetros arriba indicados de las coordenadas X, Y, Z en

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 38
ED50. Es de resaltar que, al considerar la precisión ofrecida por el GPS, las redes
convencionales, así como los parámetros de transformación en uso, ofrecen una precisión
muy inferior, degradando la calidad de los resultados obtenidos con el GPS. Además, los
vértices de las redes convencionales están, de modo general, situados en lugares de difícil
acceso, limitando la capacidad del sistema.
2.4.2. Integración del Sistema
La concepción de estas redes deberá atender a la mayoría de los usuarios GPS en
términos de precisión, aparte de tener sus vértices en lugares de acceso relativamente fácil.
Los parámetros de transformación citados también deberán ser adecuados, en cada zona,
para fines cartográficos, siendo conveniente reevaluarlos. Obsérvese que se trata de una
red pasiva, que exige la ocupación de sus vértices en la definición de nuevas estaciones.
En muchos casos, la conexión a la red por usuarios que sólo disponen de receptores de
frecuencia simple exigirá la ejecución de más de una base, teniendo en cuenta que en estas
circunstancias se recomiendan bases de unos 10 km. debido fundamentalmente a los
problemas de cambio de las condiciones atmosféricas, sobre todo de refracción
ionosférica.
Se entiende que, en un determinado momento, los usuarios de un determinado país
como, por ejemplo, el nuestro, estarán utilizando tres sistemas geodésicos de referencia
(ED50, WGS84 e ITRF). El primero se usa para la cartografía, el segundo para recogida
de datos con GPS utilizando efemérides transmitidas y el tercero para fines científicos. Tal
situación representa el impacto de nuevas tecnologías y la necesidad de atender a los
usuarios. Sin embargo, en un determinado momento deberá haber una integración de estos
sistemas y lo más obvio parece ser la adopción del sistema de mejor exactitud, en este
caso podría ser el ITRF. Tal solución es a largo plazo y requiere que la mayoría de los
documentos cartográficos estén disponibles en medio digital, posibilitando efectuar una
transformación masiva de todos los datos. De esta forma, el cálculo de parámetros de
transformación necesarios y fiables entre los diferentes sistemas es esencial para obtener el
rendimiento máximo de esta importante tarea.
Es oportuno destacar que la Asociación Internacional de Geodesia (IAG)
recomienda el uso del WGS84 para fines cartográficos, de navegación o banco de datos
digitales (McCarthy, 1992).
2.5. Transformación de Coordenadas WGS84 a ED50 y Viceversa
La transformación de coordenadas entre el WGS84 y el ED50 es de fundamental
importancia en las actividades con uso de GPS. Mientras el primero es el “datum” del

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 39
GPS, el segundo es el adoptado en España, para todas sus realizaciones. A continuación se
presentan las etapas fundamentales, incluidas las ecuaciones contenidas en la
transformación.
2.5.1. Conversión de Coordenadas Geodésicas en Cartesianas Tridimensionales
Representando las coordenadas cartesianas rectangulares de un punto en el
espacio por X, Y, Z, y asumiendo un elipsoide de revolución con el mismo origen del
sistema de coordenadas cartesianas, un punto puede, también, expresarse por las
coordenadas geodésicas (elipsoidales) , y h. La Figura 2.4 ilustra el caso en cuestión.
ZZ
YYXX
N
h
a
P
b
Figura 2.4: Coordenadas Geodésicas y Cartesianas Tridimensionales
La relación entre las coordenadas cartesianas y elipsoidales viene dada por:
X
Y
Z
N h
N h sen
e N h sen
N a e sen
e a b a f f
f a b a
( )cos( )cos( )
( )cos( ) (
(( ) )
)
/ ( ( ))
( ) /
( ) /
/
1
1
2
2
2 2 1 2
2 2 2 2 2
(2.11)
donde:
es la latitud geodésica, que es el ángulo que la normal al elipsoide, pasando
por P, forma con su proyección ecuatorial,

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 40
es la longitud geodésica, que es el ángulo comprendido entre los meridianos
geodésicos de Greenwich (origen) y el del punto P (positiva al Este) o de cualquier
punto sobre la normal,
h es la altitud geodésica, que es la distancia de P al elipsoide, contada sobre la
normal,
N es la gran normal ( radio de curvatura del primer vertical),
e2 es la primera excentricidad numérica, y
f es el achatamiento.
El valor de la altitud geodésica viene dado, aproximadamente, por:
h N H (2.12)
donde N es la ondulación del geoide y H la altitud ortométrica. La figura 2.5 ilustra estas
tres cantidades de fundamental importancia para las actividades geodésicas. La cantidad
de especial interés para actividades de ingeniería es la altitud ortométrica H. El GPS
proporciona la altitud geodésica h, cuya conversión a ortométrica, necesita el
conocimiento de la ondulación del geoide (N).
P
H
h
N
SuperficieTopográfica
Geoide
Elipsoide
Figura 2.5: Relación entre las tres superficies utilizadas en Geodesia
2.5.2. Transformación de Coordenadas ED50 a WGS84 y viceversa
Asumiendo que las coordenadas cartesianas obtenidas en el apartado anterior
vengan dadas en el ED50, se pueden transformar a WGS84, o viceversa, de acuerdo con
los parámetros calculados o adoptados en la zona de actuación.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 41
2.5.3. Conversión de Coordenadas Cartesianas en Geodésicas
Se trata del problema inverso de la Geodesia: Dadas las coordenadas geodésicas,
(, y h) obtener las coordenadas cartesianas (X, Y, Z). El problema puede solucionarse
iterativamente o directamente.
a) Solución Directa
Las fórmulas que proporcionan la solución directa vienen dadas por:
2222'
32
32'
/)(
)/(
)cos(/
)/(
))(cos
)(sen(
bbae
pbZaarctan
Nph
XYarctan
aep
beZarctan
(2.15)
La penúltima ecuación del conjunto (2.15) es una cantidad auxiliar y la última es
la segunda excentricidad numérica.
b) Solución Iterativa
Las expresiones utilizadas son:
)/(
)1)((
)cos(/
12
22
XYarctan
hN
Ne
p
Zarctan
Nph
YXp
(2.16)
La longitud puede calcularse directamente a partir de la última ecuación del
conjunto (2.16). Observe que latitud y altitud geodésica aparecen del lado derecho de la
ecuación, aunque, sin embargo, sean incógnitas. Para solucionar este tipo de problema se
necesita efectuar iteraciones a partir de soluciones aproximadas. Para obtener la solución
es preciso seguir los siguientes pasos:
1. Calculo de p X Y 2 2
2. Calculo de la latitud aproximada 0
2 11 arctan( )( )Z
pe
3. Calculo de un valor aproximado para la gran normal N a e sen0
2 2
0
1 21 / ( ( )) /
4. Calculo de la altitud geodésica h p N cos( )0 0

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 42
5. Calculo de un valor mejorado para la latitud
arctan( )( )Z
pe
N
N h1 2 0
0
1
6. Verificar si hay necesidad de otra iteración. Si = 0, vaya al próximo paso; si no,
vuelva al paso 3 y utilice el valor de la latitud mejorado, obtenido en el paso 5.
7. Calculo de la longitud arctan( / )Y X
Cualquiera de los dos métodos puede emplearse según convenga en cada caso
concreto.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 43
3. LOS OBSERVABLES GPS: CARACTERÍSTICAS
Y ERRORES
3.1. Los Observables GPS
Los observables son los elementos fundamentales dentro del sistema GPS.
Las características propias de las señales emitidas por los satélites y los relativos
a la configuración instantánea de la constelación permiten obtener diversos tipos de
observables, que serán tratados con diferentes técnicas de medición.
Los observables básicos del GPS pueden ser identificados como (Seeber, 1993):
Seudodistancia a partir del código,
Diferencia de seudodistancia a partir de la cuenta Doppler integrada,
Fase de la onda portadora o diferencia de fase de la onda portadora, y
Diferencia del tiempo de propagación a partir de medidas interferométricas.
En la práctica, sólo se utilizan dos observables fundamentales: seudodistancia a
partir del código y la fase de la onda portadora. En adelante, se denominarán como
observable seudodistancia y observable fase de la onda portadora.
3.1.1. Seudodistancia
Antes de describir el observable seudodistancia, se presenta una breve revisión de
la estructura de las señales transmitidas por los satélites GPS. Cada satélite transmite dos
señales para los propósitos de posicionamiento: la señal L1, basada en la portadora con
frecuencia de 1575,42 MHz y la señal L2, con frecuencia de 1227,60 MHz. Modulados
sobre la portadora L1 están los dos códigos seudoaleatórios (PRN): C/A y P(Y) con
duración de 1 milisegundo y una semana, respectivamente. Sobre la portadora L2 se
modula el código P(Y). Superpuesto sobre las portadoras L1 y L2 está, también, el
mensaje de navegación. Los códigos (PRN) utilizados en cada satélite son únicos y
cualquier par de ellos presenta baja correlación, permitiendo que todos los satélites
compartan la misma frecuencia.
Las medidas de distancias entre el satélite y la antena del receptor se basan en los
códigos generados en los satélites (Gs(t)). El receptor genera una réplica del código
producido en el satélite, que será denominada Gr(t). El retardo entre la llegada de una
transición particular del código, generado en el satélite, y la réplica del mismo, generada
en el receptor en el mismo instante, no es más que el tiempo de propagación de la señal en
el trayecto que une el satélite al receptor. El receptor realiza esta medida utilizando la
técnica de correlación cruzada, la cual está ilustrada en la Figura 3.1.
La seudodistancia se obtiene mediante la multiplicación del tiempo de
propagación de la señal, que resulta del proceso de correlación cruzada, por la velocidad

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 44
de la luz. Este observable se denomina seudodistancia, al contrario de distancia, por razón
de no existir sincronismo entre los relojes responsables de la generación del código en el
satélite y su réplica en el receptor. El error de sincronización se determina en el receptor
junto con la posición, a partir de las medidas de seudodistancias.
G ts( )
G tr( )
Tiempo de Transmisión
Tiempo de Llegada
Código Generado
en el satélite
Réplica generada
en el receptor
t
Tiempo de
Retardo
t se obtiene por correlación cruzada
Figura 3.1: Principio de la Medida de Seudodistancia
Los satélites GPS disponen de patrones atómicos de tiempo de alta precisión
(osciladores), que operan en el denominado sistema de tiempo del satélite (ts), en el cual
son referenciadas todas las señales generadas y transmitidas. Los receptores, normalmente,
disponen de osciladores de menor calidad que operan en el llamado sistema de tiempo del
receptor (tr). Es en esta escala de tiempo son referenciadas las señales recibidas. Estos dos
sistemas de tiempo, satélite y receptor, pueden ser relacionados con el sistema de tiempo
GPS (tGPS) a partir de las siguientes expresiones:
t t dt
t t dt
GPS
s s s
GPSr
r r
(3.1)
donde:
- dt s es el error del reloj del satélite con relación al tiempo GPS en el instante t
s y
- dtr es el error del reloj del receptor con relación al tiempo GPS en el instante tr.
Observe que los subíndices y superíndices se refieren respectivamente a
cantidades relacionadas con el receptor y el satélite.
Según se citó, seudodistancia (SD) es igual a la diferencia ente el tiempo tr del
receptor, en el instante de recepción de la señal, y el tiempo ts en el instante de transmisión
de la señal, multiplicada por la velocidad de la luz en el vacío. La SD puede obtenerse vía
correlación con el código P (correlación del código Y) sobre las portadoras L1 y L2 y/o
con el código C/A, sobre la portadora L1.
s
rSD
s
r
s
r
S
R dtdtccSD ][ (3.2)

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 45
r
s es el tiempo de propagación de la señal, contado desde su generación en el satélite
hasta la correlación en el receptor, c es la velocidad de la luz y PD r
s es el error de la
seudodistancia.
El tiempo de propagación r
s multiplicado por la velocidad de la luz en el vacío no
da como resultado la distancia geométrica r
s entre la antena del satélite y la del receptor,
debido, entre otros factores, a la refracción atmosférica (ionosfera ( Ir
s) y troposfera ( T
r
s))
y efectos de multicamino (multipath: mp). Así, una forma alternativa para la ecuación
(3.2) es:
s
rSD
s
r
s
r
s
r
s
r
s
r
S
R mpTIdtdtcSD ][ (3.3)
Las coordenadas del receptor y del satélite están implícitas en la distancia
geométrica r
s. Todos los términos del lado derecho de la ecuación (3.3) han de ser
comprobados matemáticamente, pues se trata del modelo matemático de la seudodistancia,
cualquier término desarrollado incorrectamente dará lugar a errores en las coordenadas del
receptor.
La disponibilidad selectiva (SA), la cual afecta a las coordenadas y relojes de los
satélites, fue introducida en el sistema GPS intentando degradar el modelo contenido en
esta ecuación, para los casos en los que la seudodistancia se obtenga vía código C/A.
3.1.2. Fase de la Onda Portadora
Un observable mucho más preciso que la seudodistancia es la fase de la onda
portadora, observable básica para la mayoría de las actividades geodésicas y topográficas.
La fase de la onda portadora r
s es igual a la diferencia entre la fase de la señal del satélite
recibida en el receptor ( s) y la fase de la señal generada en el receptor (
r), ambas en el
instante de recepción t. La fase observada (r
s ), también denominada frecuencia de
barrido (en ciclos), viene dada por:
s
r
s
rr
ss
r Mttt (3.4)
donde :
t es el tiempo de recepción de la señal en la estación r,
s (t) es la fase de la portadora generada en el satélite s y recibida en la
estación r: instante de recepción,
r(t) es la fase generada en el receptor en el instante de recepción,
s
rM es la llamada ambigüedad de la fase, y
r
s es el error de la fase de la onda portadora.
Los receptores miden la parte fraccionaria de la portadora y realizan el cómputo
del número de ciclos que entran en el receptor, resultando una medida acumulativa. El

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 46
término s
rM de la ecuación expresada arriba representa el número de ciclos (enteros) del
primer momento de observación que es denominada ambigüedad, que se estima en el
ajuste, juntamente con los demás parámetros. La precisión de la medida de la fase es del
orden de 1/100 del ciclo.
La medida de fase para una onda cualquiera con frecuencia f, puede ser
representada por:
( ) ( ) * ( )t fd t f t dtt
t
0
0 (3.5)
donde ( )t0 es la fase en un momento de referencia t0, dt es el error del reloj y f la
frecuencia.
La fase de la portadora s(t) generada en el satélite s es recibida en la estación r,
y puede ser relacionada con la fase generada en el instante de transmisión tt como:
t tt (3.6)
donde es el tiempo de propagación de la señal, el cual es función de la distancia
geométrica entre el satélite y el receptor, así como de los efectos de la ionosfera y
troposfera. Esta relación viene dada por la ley de la conservación de los ciclos, o sea: la
fase recibida en el receptor es igual a la transmitida por el satélite (t
s). De esta forma se
obtiene la siguiente expresión:
s
t
s
t
st t t f( ) ( ) ( ) (3.7)
La cual se obtiene a partir de desarrollos en serie, despreciando los términos de
orden superior a uno. La frecuencia f es nominalmente constante, pero varía debido a la
inestabilidad en el oscilador y a la degradación vía SA. Utilizando un desarrollo similar al
de la expresión (3.5) se obtiene:
s
t
s s tt t f t dt t f( ) ( ) *[ ( )] 0
(3.8)
De manera análoga se puede, también, extender la expresión representando la
fase generada en el receptor, o sea:
r r r
t t f t dt t( ) ( ) *[ ( )] 0
(3.9)
Substituyendo (3.8) y (3.9) en (3.4) se obtiene:
s
r
s
r
s
trr
tss
r Mtttdttdtfft )]()([)]()([* 00 (3.10)
El tiempo de propagación en (3.10) se compone de la parte geométrica (r
s c/ ),
de los efectos de refracción ionosférica y troposférica, respectivamente cTcI s
r
s
r /y / , y
de los efectos multicamino (mp/c). Esta expresión puede, entonces, ser reescrita como:

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 47
r
s r
s
r
s
r
s
s
r
r t
s
r
s
r
s
t fI T dm
cf dt dt
t t N
( ) *[ ]
[ ( ) ( )] 0 0
(3.11)
Nótese que en la observación de la seudodistancia el efecto de la ionosfera es
aditivo, sin embargo en la fase de la onda portadora es substraído.
3.2. Errores Propios de los observables
Los observables GPS, tal como todos los otros observables propios de los
procesos de medidas, están sujetas a errores sistemáticos y accidentales. Para obtener
resultados fiables, el modelo matemático (funcional y estocástico) establecido debe ser
válido y capaz de detectar problemas. De esta forma, las fuentes de errores contenidas en
el proceso de medida deben ser bien conocidas. Los errores sistemáticos pueden ser
parametrizados (configurados como términos adicionales) o eliminados por técnicas
apropiadas. Los errores aleatorios, a su vez, no presentan ninguna relación funcional con
las medidas y son, normalmente, las discrepancias que permanecen en las observaciones
después de que los errores sistemáticos son eliminados. Los mismos son inevitables,
siendo por tanto considerados como una propiedad inherente a la observación, aunque se
pueden modelar. Los errores groseros o equivocaciones aquí no se consideran.
En los apartados siguientes de este capítulo, serán descritas las fuentes de error en
el GPS y sus efectos sobre los observables. Se destacan los métodos y modelos utilizados
para minimizarlos. La Tabla 3.1 presenta una subdivisión en cuanto a las fuentes de error
y relaciona alguno de sus efectos. Los errores, en esta tabla, están convenientemente
agrupados de acuerdo con sus fuentes, las cuales están relacionadas con los satélites,
propagación de la señal, receptor/antena y estación.
FUENTES EFECTOS Satélite Error de la órbita
Error del reloj
Relatividad
Atraso de Grupo
Propagación de la
señal
Refracción troposférica
Refracción ionosférica
Pérdidas de ciclos
Señales reflejadas
Rotación de la Tierra
Receptor/Antena Error del reloj
Error entre los canales
Centro de fase de la antena
Estación Error en las coordenadas
Mareas terrestres
Movimiento del Polo
Carga de los océanos
Presión de la atmósfera

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 48
Tabla 3.1.: Fuentes y Efectos de los Errores Propios del GPS
La contribución de una fuente de error particular se analiza en términos de sus
efectos en la determinación de la distancia entre el satélite y el receptor, o sea, en la
seudodistancia. El efecto combinado de los errores, cuando se proyecta sobre la línea que
une a usuario y satélite, se denomina UERE (User Equivalent Range Error), que
representa el error equivalente a la distancia. En la mayoría de los receptores se muestra el
UERE de cada satélite. La Tabla 3.2, extraída de Leick (1995), muestra valores medios de
cada fuente de error, excepto para los errores relacionados con la estación.
Fuentes de Errores Errores típicos (m, 1)
SPS con satélites II/IIA PPS con satélites II/IIA
SA
Propagación de la Señal
Ionosfera
Troposfera
Reloj y Efemérides
Receptor
Multicamino
24,0
7,0
0,7
3,6
1,5
1,2
0,0
0,01
0,7
3,6
0,6
1,8
Total UERE 25,3 4,1
Tabla 3.2.: Contribuciones de los Errores GPS en la Seudodistancia
3.2.1. Errores Relacionados con los Satélites
(a) Errores orbitales
Las informaciones orbitales pueden obtenerse a partir de las efemérides
transmitidas por los satélites directamente o de las posprocesadas, obtenidas de los
Centros de Control, denominadas efemérides precisas. Las coordenadas de los satélites,
calculadas a partir de las efemérides, normalmente son impuestas como fijas durante el
proceso de ajuste de los datos GPS. Siendo así, cualquier error en las coordenadas del
satélite se propagará para la posición del usuario. En el posicionamiento absoluto
(próximo capítulo), los errores se propagan directamente para la posición del usuario. Sin
embargo, en el posicionamiento relativo, los errores orbitales son prácticamente
eliminados, pero los errores remanentes degradan la precisión de la línea base en la
medida en que ésta se torna más larga. Una regla muy útil, que expresa el error en la base
como función del error en la posición del satélite (Well et al, 1986) viene dada por:
b br
r (3.12)
donde:
b es el error resultante en la base,
b es la longitud de la base (Km),
r es el error en la posición del satélite, y
r es la distancia del satélite al receptor ( 20.200 Km.).

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 49
La precisión de las efemérides transmitidas, de acuerdo con la literatura
especializada (Seeber, 1993; Hofmann-Wellenhof et al, 1992; Leick, 1995), debe variar
entre 20 y 50 metros (1). Las mismas están disponibles en tiempo real, teniendo en
cuenta que son transmitidas con las observaciones. Las efemérides precisas, con precisión
estimada de 20 centímetros a 1 metro, resultantes del posprocesamiento, sólo están
disponibles para los usuarios dentro de la semana posterior a la recogida de datos. En la
Tabla 3.3 se presentan los errores típicos originados en el procesamiento de bases de
longitud variable entre 10 y 5000 Km. Para el caso de las efemérides transmitidas (ET) se
adoptaron como errores orbitales los valores entre 20 y 100 metros; con efemérides
precisas (EP) se consideran errores de 20 centímetros a 2 metros. Los valores de 100 y 2
metros, aunque por encima de los límites esperados, corresponden a 2.
Resultados documentados en la literatura GPS han evidenciado que la regla citada
(ecuación 3.12) es un tanto pesimista. Se ha sugerido que la misma representa, más
propiamente, la propagación de los errores orbitales sobre la componente vertical. De
cualquier forma, queda claro que el uso de las efemérides precisas deberá atender a la
mayoría de las actividades geodésicas, pues llega a alcanzar una precisión relativa del
orden de 10 ppb. (partes por billón). En las actividades que necesitan posicionamiento en
tiempo real, se han utilizado las ET. Sin embargo, si la precisión deseada debe ser mejor
que la proporcionada por el sistema GPS con el uso de ET en el método diferencial
(DGPS), la tendencia actual es el uso de WADGPS (Wide Area Differential GPS), en fase
de desarrollo, aunque en Estados Unidos, estos sistemas de WADGPS ya se encuentran en
funcionamiento. En España con el proyecto RECORD (mencionado en el capitulo 6) en
marcha y utilizando el sistema Rasant, el IGN ya se están estudiando estas posibilidades
de redes en grandes áreas de actuación.
EFEMÉRIDES Error Orbital
r(m)
Longitud de la
base b (km)
Error en la
base
b(cm)
Precisión
relativa
b/b(ppm)
ET 100
10
100
1000
5000
5
50
500
2500
5,0
ET 20
10
100
1000
5000
1
10
100
500
1,0
EP 2
10
100
1000
5000
0,1
1
10
50
0,1
EP 0,2
10
100
1000
5000
0,01
0,1
1
5
0,01

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 50
Tabla 3.3.: Efectos de los Errores Orbitales en las Líneas de Base
(b) Errores en el Reloj del Satélite
Aunque altamente precisos, los relojes atómicos incorporados en los satélites no se
corresponden exactamente con el sistema de tiempo GPS. La diferencia llega a ser, como
máximo, de 1 milisegundo (Wells et al, 1986). Los relojes son monitorizados por el
segmento de control. El valor por el cual difieren del tiempo GPS se incluye en el mensaje
de navegación en forma de coeficientes de un polinomio de segundo grado, dado por:
dt t a a t t a t toc oc
( ) ( ) ( ) 0 1 2
2 (3.13)
donde:
toc es el tiempo de referencia de reloj,
a0 es el estado del reloj del tiempo de referencia,
a1 es la marcha lineal del reloj, y
a2 es la variación de la marcha del reloj.
La técnica , utilizada en la SA, se implementa mediante la introducción de un
error en el parámetro a1. En consecuencia, cuando la SA esté activa, el polinomio
expresado no reproduce adecuadamente los errores de los relojes de los satélites, aunque
los efectos pueden ser minimizados con el posicionamiento diferencial.
(c) Relatividad
Los efectos de la relatividad en el GPS no se circunscriben sólo a los satélites
(órbitas y relojes), sino también a la propagación de la señal y a los relojes de los
receptores. El reloj del satélite, aparte de los errores ya mencionados, varía debido a la
relatividad general y especial. Los relojes de las estaciones de control y los integrados en
los satélites están situados en lugares con potenciales gravitatorias diferentes, aparte de
moverse con velocidades diferentes, esto provoca una aparente alteración en la frecuencia
de los relojes de los satélites con relación a los terrestres. Los efectos son compensados
por la reducción de la frecuencia nominal de los relojes de los satélites en 4,55x10-3
Hz,
antes del lanzamiento.
A pesar de estos cuidados, algunos efectos no son eliminados. Sin embargo, en el
procesamiento que usa la técnica diferencial, se eliminan la mayoría de estos efectos.
(d) Retraso de Grupo
Este error se deriva del retardo de las señales cuando pasan a través del hardware
del satélite, afectando al tiempo de propagación de la señal. Sin embargo, la calibración
durante la fase de pruebas de los satélites permite determinar la magnitud del retraso e
introducirla como parte de los coeficientes del polinomio del reloj.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 51
3.2.2. Errores Relacionados con la Propagación de la Señal
Las señales provenientes de los satélites atraviesan la atmósfera donde sufren
refracción, dando lugar a una trayectoria curva asociada a un retraso en la llegada de la
señal. La trayectoria curva se debe al hecho de que la señal pasa a través de varios niveles
de densidad variables. El retardo de la señal es una consecuencia de la diferencia entre la
velocidad de la señal en la atmósfera y en el vacío. El medio donde ocurre la propagación
se encuentra esencialmente en la troposfera y la ionosfera. La troposfera se extiende desde
la superficie terrestre hasta aproximadamente 50 Km. y se comporta como un medio no
dispersivo, es decir, la refracción es independiente de la frecuencia de la señal. La
ionosfera es un medio dispersivo (la refracción depende de la frecuencia), lo que significa
que la fase de la portadora y la modulación sobre ella, son afectadas de forma diferente. La
ionosfera abarca aproximadamente la región que va desde los 50 hasta los 1000 Km. por
encima de la superficie terrestre. Por tratarse de regiones que presentan comportamientos
diferentes, serán tratadas separadamente. Además de estos efectos, se incluye, en esta
sección, el efecto del movimiento de rotación de la Tierra en las coordenadas del satélite
durante la propagación de la señal.
(a) Refracción Troposférica
El efecto más significativo de la troposfera puede variar desde pocos metros hasta
llegar, aproximadamente, a los 100 metros, dependiendo de la densidad de la atmósfera y
del ángulo de elevación del satélite. La refracción troposférica es muy sensible a la
cantidad de vapor de agua presente, razón por la que se la suele dividir en dos
componentes: una seca y otra húmeda. Una de las expresiones que existen para la
refractividad es:
NP
Tx
e
T 77 6 3 73 105
2, , (3.14)
donde:
P es la presión atmosférica total (milibares),
T es la temperatura absoluta (Kelvin), y
e es la presión parcial de vapor de agua.
El primer término del lado derecho de la expresión (3.14) se refiere a la
componente seca (s) y el segundo, a la componente húmeda (h). Por tanto, la ecuación
(3.14) puede ser reescrita como:
hs NNN (3.15)

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 52
La integración de la refractividad a lo largo del camino de la señal entre el
receptor (r) y el límite de la troposfera proporciona la influencia total sobre la medida
(distancia), o sea:
dsNdsNThs H
r
h
H
r
s
s
r [10 6 (3.16)
Los términos Hs e Hh son las altitudes efectivas de las componentes seca y
húmeda respectivamente.
La medida directa de la refractividad a lo largo de la propagación de la señal sería
muy cara y prácticamente imposible de ser efectuada. Esta es la razón por la cual hay una
serie de modelos desarrollados para describir el comportamiento de esta variable.
Uno de los modelos más conocidos es el de Hopfield, desarrollado durante los
años 60, que con algunas modificaciones aún es utilizado actualmente. El siguiente
algoritmo se deriva del modelo de Hopfield (Seeber, 1993):
mH
TH
HT
exK
HT
PxK
E
K
E
KT
h
s
hh
ds
hss
r
11000
)16,273(72,14840136
4810102,155
102,155
)25,2sen()25,6sen(
2
7
7
2/122/12
(3.17)
Los términos Ks y Kh describen el efecto total de la refracción troposférica en la
dirección del zenit, y el ángulo de elevación E del satélite se da en grados.
Otro de los modelos, viene dado por:
2
5
2
6
2
1073,3
T
77,6P=N
m 8458=C )(tg1 )tg(2
10]2
)2(4[
T
ex
EBERA
B
CCRBAANT s
r
(3.18)
siendo (P) la presión atmosférica y (e) la presión del vapor de agua expresadas en
milibares.
Los modelos presentados, así como otros disponibles, que utilizan medidas en la
superficie, son capaces de reproducir con buena fiabilidad la componente seca, la cual es
responsable de la mayor parte de la refracción troposférica (90%). La contribución del
término húmedo, aunque pequeña si se compara con el seco, es más difícil de modelar. La
razón de ello está en las medidas de temperatura y presión del vapor de agua recogidas en

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 53
la estación, las cuales no son representativas de las condiciones a lo largo del camino
recorrido por la señal. Siendo así, es bastante común utilizar un modelo representativo
para las condiciones meteorológicas, al contrario de las medidas efectuadas en los lugares
de las observaciones GPS. De cualquier forma las medidas meteorológicas son recogidas
con la intención de identificar cualquier condición adversa.
Otra técnica utilizada, juntamente con los modelos disponibles, es la introducción
de un factor de escala () como una incógnita extra en el procesamiento, el cual representa
una corrección en el modelo basada esencialmente en las observaciones GPS. En realidad
se utilizan diversas formas de parametrizar . Se puede estimar un factor de escala por
estación, durante determinados intervalos, o un parámetro global para toda la red, aparte
de otras opciones. Este último caso es apropiado para redes de pequeña dimensión. En el
procesamiento de datos GPS de larga duración, 24 horas por ejemplo, el factor de escala
puede ser definido por un polinomio, intentando modelar el comportamiento variable de la
troposfera durante el período de observación. En este caso, el modelo es correlacionado en
el tiempo, vía conexión del instante inicial (t0) con los demás. Es de resaltar que la
mayoría, o casi todos los programas comerciales, no dispone de estas opciones, las cuales
son, normalmente, aplicadas en procesamiento de redes GPS de alta precisión.
(b) Refracción Ionosférica
La ionosfera, al contrario que la troposfera, es un medio dispersivo, esto significa
que la refracción ionosférica depende de la frecuencia de la señal. Una relación básica
entre el índice de refracción (n) y la frecuencia (f) viene dada por (Hofmann-Wellenhof et
al, 1992):
mayororden de términos121
f
DAn e (3.19)
donde:
A1 es una simple combinación de constantes físicas ( = 40,3 Hz2
),
De es la densidad de electrones libre en la ionosfera ( 1016
elétron/m3), y
depende, si el índice de refracción es para utilizarse con el código ( +
para el índice de refracción de grupo) o con la portadora (- para el índice
de refracción de la fase).
En esta expresión puede verse que el índice de refracción de la fase es menor que
la unidad, significando que la fase sufre un avance cuando pasa a través de la ionosfera. El
código a su vez sufre un retraso, ya que n es mayor que uno para este caso. De esta forma,
las seudodistancias son más largas y las medidas de fase de la portadora más cortas que la
distancia geométrica entre el satélite y el receptor, la diferencia es idéntica en ambos
casos. En la parte de la frecuencia de la señal n esta afectada, también, por la densidad de

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 54
electrones libres, dependiendo de la actividad solar. Las tempestades (tormentas)
magnéticas superponen un patrón irregular sobre el ciclo de la mancha solar, resultando
muy difícil de evaluar la predicción de la densidad de electrones libres. Las regiones que
presentan los mayores disturbios en la ionosfera son la ecuatorial y la polar.
Considerando sólo los términos de primer orden, la refracción ionosférica se
obtiene de la siguiente expresión:
t
s
r Df
AI
2
1 (3.20)
donde Dt es el contenido total de electrones, que representa el número de electrones de una
columna atravesando la ionosfera junto con la señal, con un área de la sección transversal
igual a 1 m2.
La dependencia de la frecuencia hace posible eliminar los efectos de primer orden
cuando se recogen los datos con un receptor de doble frecuencia, al tener comparación.
Para receptores de frecuencia simple, la ionosfera es la mayor fuente de error. En el
posicionamiento relativo, sobre distancias cortas (menores de 20 Km.), la mayoría de los
errores se eliminan. Sin embargo, los receptores de frecuencia simple se utilizan
normalmente sobre líneas base mayores que las consideradas adecuadas para eliminar gran
parte de los efectos de la ionosfera, de esta forma, el uso de modelos de la ionosfera puede
mejorar los resultados. En estos modelos, se usan las medidas de fase recogidas con
receptores de doble frecuencia, para estimar las correcciones para los usuarios de
frecuencia simple que operen en la zona de actuación de los trabajos.
(c) Pérdidas de Ciclos
Las medidas de fase son, normalmente, continuas respecto al período de una sesión
de observación. Cuando hay una discontinuidad en la medida de la fase se dice que ha
ocurrido pérdida de ciclos. Esto puede deberse al bloqueo de la señal, aceleración de la
antena, variaciones bruscas en la atmósfera, interferencias de otras fuentes de radio y
problemas con el receptor y software. Cuando ocurren pérdidas de ciclos, es de esperar
que la parte fraccionaria permanezca correcta, sólo si el número entero de ciclos sufre un
salto. Es necesario, y en la mayoría de las veces es posible, corregir la fase de la portadora
del número entero de ciclos provocando la discontinuidad. Diversas técnicas han sido
desarrolladas para este fin. Otra opción es introducir una nueva ambigüedad como
incógnita en el modelo de ajuste.
(d) Señales reflejadas (multipath)
El receptor puede recibir, en alguna circunstancia, además de la señal que llega
directamente a la antena, señales reflejadas en superficies vecinas a la misma (multipath) o
multicamino. Tal circunstancia depende de la refractividad del medio donde se coloca la

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 55
antena, características de la antena y de técnicas utilizadas para impedir señales reflejadas.
Las condiciones, un tanto arbitrarias, integradas en la recogida de datos, hace un tanto
difícil modelar estos efectos, a pesar de que algunas combinaciones de observables
permitan evaluar el nivel de señales reflejadas. Estos efectos son considerados,
normalmente, como errores aleatorios, no obstante, en algunos casos, se pueden comportar
como efectos sistemáticos. De esta forma, la recomendación más efectiva es evitar
recogidas en lugares propicios a estos efectos. En el mercado actual, existen antenas que
procuran eliminar este efecto (choke ring). En la figura 3.2 se muestra la aparición de
señales reflejadas.
Figura 3.2.: Señal Reflejada
(e) Rotación de la Tierra
El cálculo de las coordenadas del satélite, presentado en el capítulo primero, fue
para el instante de transmisión de la señal y en un sistema de coordenadas fijo a la Tierra,
sin embargo ahora se comprueba que se hace necesario efectuar la corrección del
movimiento de rotación de la Tierra. Durante la propagación de la señal, el sistema de
coordenadas gira con relación al satélite, alterando sus coordenadas. Las coordenadas
originales del satélite deben girar sobre el eje Z un ángulo , definido como el producto
del tiempo de propagación por la velocidad de rotación de la Tierra e :
e (3.21)
Siendo X’, Y’, Z’ las coordenadas originales del satélite y X, Y, Z las corregidas,
se tiene que:

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 56
X
Y
Z
X
Y
Z
1 0
1 0
0 0 1
'
'
'
(3.22)
con en radianes, debido a ser un ángulo muy pequeño ( 1,25”).
Este efecto se consigue aplicando la matriz en el modelo de tratamiento del
ajuste.
3.2.3. Errores Relacionados con el Receptor y la Antena
Los errores relacionados con el receptor y la antena son los debidos al hardware
del receptor y diseño de la antena.
(a) Error del reloj
Los receptores GPS están equipados, normalmente, con osciladores de cuarzo, los
cuales poseen buena estabilidad interna y son de coste relativamente bajo. Cada receptor
posee su propia escala de tiempo, definido por el oscilador interno, la cual difiere de la
escala de tiempo GPS. Algunos receptores poseen osciladores altamente estables,
pudiendo aceptar patrones de tiempo externo. No obstante, son receptores de coste
elevado, normalmente utilizados en trabajos de muy alta precisión. De cualquier forma, en
el posicionamiento relativo, los errores de los relojes son prácticamente eliminados, no
exigiendo, para la mayoría de las aplicaciones, patrones de tiempo altamente estables, con
el coste que ello supondría.
(b) Errores entre Canales
Cuando un receptor posee más de un canal de rastreo, puede ocurrir un error
sistemático entre los canales. Actualmente, la mayoría de los receptores geodésicos o
topográficos poseen canales múltiples, para cada uno de los canales que registran los datos
de un satélite particular y por tanto sujeto a este tipo de error. Para corregirlo, el receptor
realiza una calibración en el inicio de cada toma de datos (puesta en estación). Para ello,
cada canal rastrea simultáneamente un satélite en particular y determina los errores con
relación a un canal tomado como patrón. Todas las medidas siguientes son corregidas de
este efecto.
(c) Centro de Fase de la Antena
El centro eléctrico de la antena es un punto en el cual son referenciadas las
medidas de las señales y generalmente no coinciden con el centro físico de la antena. La
discrepancia varía con la intensidad y dirección de las señales y es diferente para la
portadora L1 y L2. Para la recogida de datos de alta precisión, todas las antenas que
intervengan en un determinado proyecto deben ser calibradas, intentando corregir las

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 57
observaciones. Antenas del mismo fabricante y modelos iguales no deben presentar
mayores problemas. Sin embargo, se recomienda que la orientación de todas las antenas
que participan en un proyecto estén colocadas en una misma dirección, como puede ser el
norte aproximado.
3.2.4 Errores relacionados con la Estación
Aparte de errores en las coordenadas de la estación, en el caso de fijar las
coordenadas de la estación base, otros errores derivados de fenómenos geofísicos pueden
causar variaciones en las coordenadas de las estaciones implicadas en la toma de datos
durante el período de recogida de las observaciones. Entre los mismos están incluidos los
efectos de mareas terrestres, carga de los océanos y carga de la atmósfera. En este
apartado se han supuesto eliminados los errores propios de centrado y puesta en estación,
que se han de valorar pues pueden producir errores de consideración, en algunos casos.
(a) Coordenadas de la Estación
El posicionamiento GPS, en el modo relativo, proporciona diferencias de
coordenadas tridimensionales (X, Y, Z) de alta precisión. Las diferencias de
coordenadas no contienen informaciones sobre el sistema de referencia (datum), las cuales
son indispensables en cualquier tipo de recogida de datos. Para ello, por lo menos, un
punto debe mantenerse como fijo, pues cualquier error en sus coordenadas será propagado
a las coordenadas de los puntos determinados a partir de él. Otro tipo de problema que casi
siempre pasa desapercibido es el error en la posición del punto fijo, el cual también
afectará a las componentes relativas, no especialmente a los incrementos de X, Y, Z,
sino a los incrementos de coordenadas , , h. La obtención de cada una de estas
componentes es función de las coordenadas supuestamente equivocadas. Se ha
demostrado que un error de 5 metros en las coordenadas de una estación base puede
producir errores de 1.0, 0.9 y 0.8 ppm en las diferencias de coordenadas geodésicas ,
y h respectivamente. Ello muestra la importancia de tener coordenadas de las
estaciones bases compatibles en cuanto a precisión con las del WGS84, en otro caso
pueden ser previsibles deformaciones del orden de 20 metros o mayores, lo que
ciertamente deteriorará la alta fiabilidad proporcionada por el GPS.
(b) Mareas Terrestres
La deformación de la Tierra debido a las fuerzas de las mareas respecto al sol y a
la luna se denomina mareas terrestres. Próximo al ecuador, la superficie se desplaza
alrededor de 40 cm durante un período de 6 horas. La variación es función de la posición
del sol y de la luna, siendo los períodos principales de estas variaciones de 12 horas
(semidiurna) y de 24 horas (diurna). Tal variación es función del tiempo, pero también

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 58
depende de la posición de la estación. El efecto es similar para estaciones adyacentes y es
probable que la mayoría de ellos sea cancelado en el proceso diferencial. Para redes con
líneas base largas, tales efectos deben ser modelados. Detalles del algoritmo patrón, para
ser utilizados con GPS, se dan en el IERS Estándares.
(c) Movimiento del Polo
La variación de las coordenadas de las estaciones causadas por movimientos del
polo también debe ser considerada. Tal variación alcanza incluso los 25 mm (componente
radial) y no se cancela durante el tiempo de observación de la sesión. Sin embargo, en el
posicionamiento relativo es prácticamente eliminada.
(d) Carga de los Océanos
El peso que el océano ejerce sobre la superficie terrestre produce cargas
periódicas en la superficie terrestre resultando un desplazamiento. La magnitud del
desplazamiento depende de la alineación del sol, luna y posición del observador, pudiendo
alcanzar cerca de 10 cm en la componente vertical en alguna parte del globo. En regiones
apartadas de la costa, este valor disminuye, pero aún así pueden alcanzar cerca de 1 cm
para distancias (océano-estación) de 1000 km. Considerando la precisión anunciada para
el GPS, tales efectos deben ser tenidos en consideración cuando se pretende una recogida
de datos de alta precisión. Para la mayoría de las aplicaciones, tal efecto puede ser
despreciado, como en efecto lo es, sin mayores problemas.
(e) Presión de la Atmósfera
La presión o carga (el peso) de la atmósfera ejerce una fuerza sobre la superficie
terrestre. Variaciones de la distribución de la masa atmosférica, la cual puede ser valorada
a partir de la medida de presión de la atmósfera, inducen a deformaciones sobre la corteza,
principalmente en la dirección vertical. Las mayores deformaciones están asociadas con
tempestades en la atmósfera, pudiendo alcanzar los 10 mm. La mayoría de los programas
para procesamiento de datos GPS aún no presentan modelos para correcciones de esta
naturaleza. Para redes de gran dimensión, que requieran alta fiabilidad, se recomienda que
las campañas que duren de 3 a 5 días, se amplíen a 2 semanas. No se trata de un efecto con
el cual el usuario deba preocuparse, pero vale la pena tener conocimiento del mismo y
saber que el GPS es sensible al mismo.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 59
4. MODELOS MATEMÁTICOS USADOS EN GPS
4.1. Introducción
Cualquier proyecto de Topografía o Geodesia abarca una serie de actividades
relacionadas con la planificación, recogida, análisis preliminares, procesamiento de datos
y, finalmente, la evaluación y presentación de los resultados. En la planificación y
preanálisis del proyecto, así como en el procesamiento de los datos obtenidos, el modelo
matemático (funcional y estocástico) es el elemento central. Éste relaciona los datos
recogidos con los parámetros incógnita.
Es normal recoger una cantidad de datos redundantes, es decir, superior al
mínimo necesario para obtener una única solución de los parámetros incluidos en el
proyecto, lo que permite efectuar el control de calidad del proceso. La valoración de los
parámetros incógnita con datos redundantes se basa generalmente en el método de los
mínimos cuadrados (MMCC).
A continuación se presenta un resumen de los principios básicos de la valoración
por MMCC y control de calidad, seguido de una breve descripción de los modelos
matemáticos básicos utilizados en el procesamiento de datos GPS. Los modelos se
reducen a los casos en que las posiciones de los satélites son conocidas a partir de las
efemérides transmitidas o precisas.
4.2. Ajuste por Mínimos Cuadrados
El ajuste por MMCC puede efectuarse usando el método de las observaciones
indirectas o ecuaciones de observación, el método de las ecuaciones de condición y el
método combinado. El método utilizado frecuentemente en el procesamiento de datos
GPS, así como en los modelos clásicos actuales por su mayor simplicidad de cálculo, es el
de las observaciones indirectas, el cual se presenta a continuación.
4.2.1. El Método de las Observaciones Indirectas
Un modelo lineal o linealizado inconsistente se vuelve consistente con la
introducción del vector V (mx1) de los residuos, tal que:
n>mcon KVAX (4.1)
donde:
m es el número de ecuaciones,
n es el número de incógnitas,
K es el vector (mx1) de las observaciones,
X es el vector (nx1) de los parámetros incógnita,
A es una matriz (mxn) de escalares conocidos, designada matriz de diseño.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 60
Para obtener medidas de la calidad de los resultados de la valoración de mínimos
cuadrados, debe formar parte del modelo una descripción cualitativa de los datos de
entrada (vector de las medidas). Tal descripción es de naturaleza probabilística, teniendo
en cuenta que las medidas, cuando son repetidas bajo circunstancias similares, pueden ser
definidas, con buena aproximación, por una variable aleatoria. Será entonces asumido que
el vector que contiene los valores numéricos de las medidas representa una muestra del
vector aleatorio de las observables, entonces este vector es el resultado de la adición de
una parte determinista (AX) y de una parte aleatoria (V), tal como viene reflejado en la
ecuación (4.1).
Asumiendo que la naturaleza probabilística de la variabilidad de las medidas está
definida por el vector V, parece aceptable asumir que la media del valor esperado de la
variabilidad sea cero, es decir: E V{ } 0 , donde E{.} representa la esperanza
matemática. La medida de la variabilidad se representa por la matriz varianza-covarianza,
en adelante simplemente matriz covarianzas la cual se considera conocida, representada
por K,
}{KDK 4.(2)
donde D{.} representa el operador de dispersión. La ecuación (4.1), ampliada con el
modelo estocástico, puede ser reelaborada, teniendo en cuenta (4.2), como:
}{KEAX (4.3)
que es el modelo matemático de los vectores de los observables.
4.2.2. Cálculo y Estimación por Mínimos Cuadrados
El principio de mínimos cuadrados viene dado por:
)()( AXKPAXK t mínimo (4.4)
donde P es una matriz simétrica definida positiva (mxm), denominada matriz de los pesos,
la cual tiene en consideración la diferencia de precisión de las observaciones. La
minimización de (4.3) proporciona el cálculo del parámetro en cuestión, es decir:
)()(ˆ 1 PKAPAAX tt (4.5)
donde el superíndice t representa la transposición de una matriz.
A partir del valor calculado para el parámetro X̂ , se obtienen respectivamente los
cálculos de las observaciones ajustadas y residuos
VXAKyKXA ˆ ˆˆ ˆˆ (4.6)
La calidad de las cantidades calculadas, pueden ser obtenidas a partir de los dos
primeros momentos de K, es decir, media y desviación típica. Asumiendo que el modelo

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 61
representado por (4.3) sea válido, los cálculos de mínimos cuadrados no son tendenciosos
y esta propiedad es independiente de la elección de la matriz P. La misma se puede
obtener a partir de la inversa de la matriz covarianzas de K, escalada por el factor de
varianza a priori 0
2 , es decir,
12
0
KP (4.7)
que se puede definir como un estimador de MMCC.
Con la aplicación de la ley de propagación de covarianzas, las ecuaciones (4.5) y
(4.6) revierten en las siguientes expresiones:
KKV
XK
X
ˆˆ
tˆˆ
1t2
0ˆ
AA
)PAA(ˆ
(4.8)
donde:
X es la matriz covarianzas de los parámetros ajustados,
K̂
es la matriz covarianzas de las observaciones ajustadas, y
V es la matriz covarianzas de los residuos estimados.
Estos valores posibilitan la descripción de la calidad de los resultados en términos
de media y matriz covarianzas, el término 0
2 es denominado factor de varianza a
posteriori, el cual es utilizado para analizar la calidad global del ajuste.
4.2.3. Modelos no Lineales
Los resultados presentados implican cálculo lineal, sin embargo, es práctica usual
en geodesia trabajar con modelos no lineales. Las ecuaciones de observación no lineales
son linealizadas antes de aplicar los MMCC; Iniciando el ajuste con un valor aproximado
X0 para los parámetros incógnita, próximo o suficiente de X, se aplica una linealización a
través de la serie de Taylor y el modelo de MMCC se aplica entonces sobre el modelo
linealizado, el cual se expresa como:
XAKE K }{ (4.9)
con:
0
00
0
)(
X
FA
XFK
KKK
K
(4.10)
donde:
K es el vector de las observaciones substraído del vector de las observaciones
calculadas en función de los parámetros aproximados (X0),

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 62
AK es la matriz de las derivadas parciales de las funciones no lineales F (en
adelante denominada simplemente A)
X el vector de las correcciones a los parámetros aproximados X0.
La primera solución del modelo lineal mejora el vector de los parámetros iniciales.
El proceso se repite utilizando los parámetros resultantes de la solución anterior como
aproximados. Este ciclo iterativo se cierra cuando las diferencias entre sucesivas
soluciones no sean significativas, o bien, imponiendo un número de iteraciones
determinado, que no suele ser mayor que dos.
4.2.3. Evaluación de los Datos
La calidad de los resultados del ajuste es representativa sólo en los casos en que
el modelo de las observaciones de ecuaciones representado por las ecuaciones (4.2 y 4.3)
sea válido, significando que no hay presencia de errores en el modelo. Si se necesita una
descripción significativa de la calidad, es decir, evidencias de la presencia o ausencia de
errores en el modelo, esta debe ser investigada y valorada. Esto se obtiene por medio de
pruebas de hipótesis, donde el modelo original, designado como la hipótesis nula H0 es
probado frente a un modelo extendido, denominado hipótesis alternativa H1. Para la
realización de la prueba, se asume que los observables K tienen distribución normal con
esperanza matemática AX y dispersión K, es decir:
),(~:0 KAXNKH (4.11)
Para obtener evidencias de la presencia de errores en el modelo, la magnitud del
error se introduce en el modelo como una incógnita adicional. El modelo extendido
forma la hipótesis alternativa:
),(~:1 KCAXNKH (4.12)
donde C es una matriz (mxq) a determinar según que caso, y es un vector incógnita de
orden (qx1), donde q representa el número de errores a probar en el modelo, pudiendo
variar en el intervalo 1 q (m-n). Tras calcular y testar su importancia, es posible
tomar una decisión sobre la presencia o no de errores en el modelo.
El caso q = 1, tiene una importante aplicación en GPS, se trata de la detección de
errores groseros, conocido como data snooping, desarrollado en la Universidad Técnica de
Delft (Holanda). El caso q = (m-n) corresponde al test global del ajuste, también conocido
como test Chi-cuadrado ( 2 ), el cual viene dado por:

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 63
)/(ˆˆˆ 2
0 nmVPV t (4.13)
con (m-n) representando el número de grados de libertad. El test se rechaza si
/ ( ),
0
2 2 q
m n . Esta prueba funciona como una protección, pues ofrece una
indicación sobre la validez del modelo. En caso de rechazo, es conveniente investigar en el
procesamiento de datos para localizar el posible problema que afecta al modelo.
4.3. Modelo Matemático de los Observables GPS
Cada medición de los observables GPS fundamentales, seudodistancia y fase de la
portadora, genera una ecuación de observación en el modelo representado por las
ecuaciones (4.2 y 4.3), esto implica que los errores que afectan a las observaciones tenga
esperanza matemática igual a cero. Esta condición es prácticamente alcanzada al
diferenciar las observaciones (simples, dobles y triples diferencias) y utilizando algunas
combinaciones especiales de los observables, sin embargo, cada diferenciación aumenta el
ruido del observable resultante.
La ecuación de observación de la seudodistancia, para las señales L1 y L2, son de
la forma:
2
1
][
][
2
1
S
s
r
s
r
s
r
s
r
s
r
S
s
r
s
r
s
r
s
r
s
r
vmpTIdtdtcSD
vmpTIdtdtcSD
(4.14)
Básicamente, la seudodistancia (SD) es igual a la diferencia ente el tiempo (t)r del
receptor, en el instante de recepción de la señal, y el tiempo (t)s en el instante de
transmisión de la señal, multiplicada por la velocidad de la luz (c) en el vacío. El tiempo
de propagación (r
s) multiplicado por la velocidad de la luz en el vacío no da como
resultado la distancia geométrica (r
s) entre la antena del satélite y la del receptor, debido,
entre otros factores, a la refracción atmosférica ionosfera ( Ir
s) y troposfera ( T
r
s) y efectos
reflejados de multicamino (multipath: mp); dt s y dt
r son los errores del reloj del satélite y
del receptor con relación al tiempo GPS en los instantes (t)s y (t)r , y () los residuos de las
observaciones.
Los subíndices y superíndices se refieren respectivamente a cantidades
relacionadas con el receptor y el satélite, y las señales correspondientes se identifican por
los subíndices 1 y 2. Por simplicidad, la dependencia del instante de la observación (t) ha
sido ignorada en las ecuaciones desarrolladas.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 64
La ecuación de observación de la portadora, para las dos portadoras L1 y L2
viene dada como:
220202222
10101111
)]()([ ][*)(
)]()([ ][*)(1
vNttdtdtfc
TIf
vNttdtdtfc
TIf
s
trr
ss
r
s
r
s
rs
r
s
trr
ss
r
s
r
s
rs
r
(4.15)
Los términos que componen las ecuaciones del conjunto (13) ya fueron definidos
anteriormente en la ecuación de la seudodistancia, excepto que es la fase de la
portadora, iN es la llamada ambigüedad de la fase, y f la frecuencia; los efectos de señales
reflejadas serán considerados como parte de los residuos ( v1
y v 2
).
4.3.1. Combinaciones Lineales de los Observables GPS
Una de las cuestiones de interés en los métodos de cálculo es la determinación de
ambigüedades de fase de la portadora. Para ello los algoritmos de cálculo utilizan tácticas
para determinar el número entero de longitudes de onda utilizando los métodos de
búsqueda y fijación de ambigüedades y procurando no acumular ruido. Estas operaciones
son fundamentales para obtener la precisión adecuada en infinidad de trabajos.
Para el propósito de estas notas, sólo serán abordadas combinaciones con la fase
de la portadora, debido a su mayor precisión y aplicación en topografía y geodesia, aunque
esto también pueda ser aplicado a las seudodistancias o combinaciones entre ambas y
también empleando las portadoras y códigos sobre las frecuencias mencionadas.
Una combinación lineal (Li) de las portadoras 1 y 2 viene dada por:
2211 mmiL (4.16)
Utilizando distintos valores para los mi se obtienen algunas combinaciones
frecuentemente empleadas.
Un resumen de las principales propiedades de algunas combinaciones lineales,
incluyendo las originales (L1 y L2), se dan en la Tabla 4.1.
La desviación típica de la observación de fase original (L1) puede ser propagada
para las diferentes combinaciones lineales a partir de la expresión:
m m L
m m1 2 1
2
2
2
1 (4.17)
La desviación típica de la observación original L1 y L2 (ruido) es asumida como
L = 0,10 radianes, que corresponde a 3,0 y 3,9 mm respectivamente en las portadoras L1
y L2, y representa aproximadamente las especificaciones dadas en los equipos por los
fabricantes.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 65
Observable m1 m2 m m1 2
(cm) m m1 2
(mm)
L0 f f f
1
2
1
2
2
2/ ( ) f f f f1 2 1
2
2
2/ ( ) 19,0 9,0
L1 1 0 19,0 3,0 L2 0 1 24,0 3,9
L 1 -1 86,2 19,4
L 1 1 10,7 2,2
Tabla 4.1: Combinaciones Lineales de las Portadoras
Una combinación lineal muy importante es la denominada libre de la ionosfera,
identificada en la Tabla 4.1 como L0, algunos autores la denominan como observable L3.
Esta reduce considerablemente los efectos de la ionosfera y es el observable normalmente
utilizada en el posicionamiento de alta precisión, especialmente en redes que incluyan
bases muy largas. El procesamiento del observable L0, juntamente con la denominada
wide lane (L) de frecuencia 347.82 MHz, es muy útil en la etapa de detección de la
pérdida de ciclos, esto se debe al sincronismo de los dos observables, por un lado con los
efectos de la ionosfera prácticamente nulo y por otro con longitud de onda mayor. En el
procesamiento de bases cortas, donde los efectos de la ionosfera son prácticamente
eliminados en el posicionamiento relativo, su uso no ofrece ventajas pues el ruido de este
observable (L0) se hace dominante.
La mayor longitud de onda del observable L0 la hace importante en los
problemas de resolución de la ambigüedad. Sin embargo la observable L (narrow lane)
de frecuencia 2803.02 MHz, presenta el ruido más bajo de todas las combinaciones
lineales, sin embargo debido a su menor longitud de onda la hace más difícil en la
resolución de ambigüedades. Este observable (L), una vez substraída de la L, es
denominada señal ionosférica, pues contiene todos los efectos de la ionosfera. La misma
permite un análisis detallado del comportamiento de la ionosfera y es útil para ayudar en
la resolución de ambigüedades (Teunissen, 1991).
4.3.2. Diferenciación de los Observables
Las combinaciones lineales presentadas en la sección anterior se refieren a las
combinaciones entre observables recogidas en una misma estación, estas pueden ser
combinadas entre diferentes estaciones, satélites y épocas, así como entre diferentes
observables (seudodistancia y portadora). Cuando combinamos observables entre
estaciones, se trata de posicionamiento relativo, se asume entonces, en una línea base, que
una de las estaciones posea coordenadas conocidas a partir de las cuales se determinan las
coordenadas de la nueva estación.
Una ventaja del posicionamiento relativo es que los errores incluidos en las
observaciones originales son eliminados o reducidos cuando se forman las diferencias

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 66
entre los observables de las estaciones. Los observables secundarios, derivados de las
originales, son denominadas simples, dobles y triples diferencias.
4.3.2.1. Simples Diferencias
Las simples diferencias se pueden formar entre dos receptores, dos satélites o dos
épocas o momentos. Las combinaciones normales incluyen diferencias entre satélites y
estaciones. La simple diferencia calculada entre dos receptores se muestra en la figura 4.1,
es una suposición fundamental el que dos receptores (r1 y r2) rastreen simultáneamente el
mismo satélite (s1).
Figura 1: Formación Básica de la Simple Diferencia
La diferencia entre las seudodistancias observadas simultáneamente en dos
estaciones es la simple diferencia de seudodistancia, en este caso la ecuación de
observación de la seudodistancia viene dada por:
SSDvdtdtcSD )( 21
1
2,1
1
2,1 (4.18)
con:
12
1
1
1
2
1
, (4.19)
Los subíndices (S, D, T) se identifican con las simples, dobles y triples diferencias de fase.
En esta observación, el error del reloj del satélite dts
que aparece en la ecuación
(4.14) se elimina. Así mismo, los errores debidos a las posiciones del satélite y refracción
atmosférica son minimizados, especialmente en bases cortas, donde los efectos de la
ionosfera y troposfera son similares en cada estación. Para bases largas, la refracción
S1
r 1 r 2

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 67
troposférica debe ser modelada y la ionosférica reducida por el uso de la combinación
lineal L0, otra opción es simplemente ignorar los efectos, lo que deteriora los resultados.
Los errores no modelados o no totalmente eliminados (ignorados) son asumidos como de
naturaleza aleatoria y formando parte del residuo en cuestión.
Con las mismas consideraciones expuestas, la simple diferencia de la fase de onda
portadora se expresa como:
SvNtdtdtfc
f+)(][ 1
2,102,121
1
2,1
1
2,1 (4.20)
donde f es la frecuencia de la observable en consideración. Se tiene además que,
1
2
1
1
1
2,1
0201021 )()()(
NNN
ttt
(4.21)
Observe que, aparte del error del reloj del satélite (dts), la fase inicial en el satélite
correspondiente en el momento de referencia t0 ( tt1
0( ) ), también queda eliminada.
4.3.2.2. Dobles Diferencias
La doble diferencia es la diferencia entre dos diferencias simples. Abarca, por
tanto, dos receptores y dos satélites, como muestra la figura 4.2:
Figura 4.2: Formación Básica de las Dobles Diferencias
La ecuación de doble diferencia de la seudodistancia viene dada por:
DSDvSD 2,1
2,1
2,1
2,1 (4.22)
donde:
12
12
12
1
12
2
,
,
, , (4.23)
S1 S2
r1 r2

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 68
La ecuación correspondiente a la fase de la onda portadora viene dada como:
D
vMc
f 2,1
2,1
2,1
2,1
2,1
2,1 )( (4.24)
con:
2
2
2
1
1
2
1
1
2,1
2,1 NNNNN (4.25)
El término 2,1
2,1N se llama ambigüedad de la doble diferencia, la cual para algunas
combinaciones lineales se supone un número entero. Observe que los términos que
representan las combinaciones de la fase inicial de los receptores y los errores de los
relojes de los receptores (dt1 e dt2 ) son eliminados.
La ecuación de doble diferencia es normalmente la observable preferida en los
procesos de datos GPS que incluyen la fase de la portadora, pues parece proporcionar la
mejor combinación entre el ruido resultante y la eliminación de errores sistemáticos
incluidos en los observables originales.
4.3.2.3. Triples Diferencias
La ecuación de triple diferencia viene dada por la diferencia entre dos dobles
diferencias, incluyendo incluso receptores y satélites, pero en épocas distintas (t1 y t2). En
el caso de la seudodistancia, la triple diferencia no ofrece ninguna ventaja con relación a
las anteriores. Sin embargo, para la fase de la portadora, la ambigüedad se elimina,
dejando como incógnitas sólo las coordenadas de los receptores. Ésta viene dada por:
T
vttc
ftt )]()([)()( 2
2,1
2,11
2,1
2,12
2,1
2,11
2,1
2,1 (4.26)
Este observable es bastante sensible a la pérdida de ciclos, razón por la que es
normalmente utilizada en la detección de pérdidas de ciclos en la fase de pre-
procesamiento. Normalmente, no se utiliza en la solución final, pues el beneficio
conseguido con la eliminación de las ambigüedades se contrapone con un mayor ruido en
el observable, además de introducir correlación temporal entre las diferentes
combinaciones.
4.3.3. Matriz Varianza-Covarianza de los Observables
Las observaciones de fase o seudodistancia pura, es decir, las observaciones
originales, se suponen no correlacionadas en el espacio y tiempo. Siempre que los
observables diferenciadas sean combinaciones de varias observables originales, se vuelven
correlacionadas, debiendo ser considerada, esta correlación, en el ajuste.
La matriz covarianzas de un vector i que contenga las observaciones recogidas
en dos estaciones durante un momento ti se consigue de la siguiente forma:

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 69
i
T n n [ , ,..., , , ,..., ]1
1
1
2
1 2
1
2
2
2 (4.27)
que viene dada por:
i
In
2
2 (4.28)
donde I2n es la matriz identidad de orden igual al número de observaciones (2n) y 2 es la
varianza de la observación no diferenciada. Las observaciones de simples diferencias
pueden ser escritas ahora como:
innS IIi
],[ (4.29)
donde iS es un vector (nx1) que contiene las simples diferencias.
Aplicando la ley de propagación de covarianzas, se obtiene la matriz covarianzas
del vector de las simples diferencias.
nIiS
22 (4.30)
Las ((n-1)x1) observables de doble diferencia contenidas en el vector iD se
obtienen a partir de las simples diferencias, y pueden ser escritas como:
ii SD C (4.31)
La matriz C de orden ((n-1)xn) que contiene las informaciones de doble
diferencia puede ser definida de varias formas. En la práctica, sólo dos formas son
extensamente utilizadas, las cuales se denominan diferencia secuencial y satélite de
referencia o base. En el método de la diferencia secuencial, la matriz C viene dada por:
110...0
...
0...0110
00...011
C (4.32)
y en el método del satélite base, con el satélite 1 definido como base, viene dada por:
10001
...
0...0101
00...011
C (4.33)
Aplicando la ley de propagación de covarianzas, y considerando la matriz C dada
por el método de diferencia secuencial (4.32), se obtiene:
2100...00
1210...00
...
00...0121
00...0012
22iC (4.34)

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 70
En el caso en que se considera el satélite base, independiente del satélite escogido
como referencia, se tiene:
21...11
...
1...121
11...12
22
iC (4.35)
Es importante resaltar que la elección del método para formar las dobles
diferencias no afectan a los resultados del procesamiento.
Las dobles diferencias no son correlacionadas entre épocas (momentos), por
tanto, la matriz covarianzas de, por ejemplo, k épocas, se compone por k bloques
diagonales, similares a los de la ecuación (4.34) o (4.35). El desarrollo de la matriz
covarianzas de la triple diferencia, para el caso de una línea base, se deduce de inmediato
siguiendo los mismos pasos anteriores.
4.3.4. Linealización de los Observables GPS
Los observables GPS son no lineales respecto a las coordenadas de las estaciones y
satélites, las cuales componen la distancia geométrica . En esta sección, la linealización
de se deduce a partir de la expresión:
222 ))(( ))(( ))(()( i
j
i
j
i
jj
i ZSZYSYXSXS (4.36)
Las coordenadas del satélite j, (Xj(S), Y
j(S), Z
j(S)) son, normalmente, impuestas a
los valores obtenidos a partir de las efemérides transmitidas o precisas y consideradas
como constantes en el ajuste. Asumiendo los valores aproximados Xio, Yio, Zio para las
coordenadas del receptor i (estación), la distancia aproximada puede ser calculada como:
2
0
2
0
2
00 ))(())(())(()( i
j
i
j
i
jj
i ZSZYSYXSXS (4.37)
y las coordenadas de la estación pueden representarse por:
X X X
Y Y Y
Z Z Z
i i i
i i i
i i i
0
0
0
(4.38)
donde Xi, Yi y Zi son las correcciones a los valores aproximados, siendo, de esta
forma, las incógnitas del ajuste.
Introduciendo la ecuación (4.38) en (4.36) y desarrollando la expresión resultante
en una serie de Taylor de primer orden, se obtiene:

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 71
i
i
j
i
i
i
j
i
i
i
j
ij
i
j
i ZZ
SY
Y
SX
X
SSS
0
0
0
0
0
0
0
)()()()()(
(4.39)
con las derivadas parciales dadas por:
)(
)(
)()(
)(
)(
)()(
)(
)(
)()(
0
0
0
0
0
0
0
0
0
0
0
0
S
ZSZ
Z
SSc
S
YSY
Y
SSb
S
XSX
X
SSa
j
i
i
j
i
j
ij
i
j
i
i
j
i
j
ij
i
j
i
i
j
i
j
ij
i
(4.40)
Ahora, la ecuación (34) es lineal con respecto a las incógnitas Xi, Yi, Zi,
pudiendo ser escrita como:
i
j
ii
j
ii
j
i
j
i
j
i ZScYSbXSaSS )()()()()( 0 (4.41)
como solución final.
El resultado de los modelos presentados, según la literatura consultada, son los
propios para el desarrollo y cálculo de las observaciones GPS y los establecidos
básicamente en los programas de desarrollo de los equipos normalmente utilizados en las
mediciones.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 72
5. TÉCNICAS DE POSICIONAMIENTO GPS
5.1. Introducción
El posicionamiento topográfico o geodésico puede ser realizado en el modo absoluto
o relativo. En el primer caso, la posición del punto se determina en un sistema de
referencia bien definido, que en el caso del GPS es el WGS-84. En el posicionamiento
relativo, la posición de un punto es determinada con relación a la de otro u otros, cuyas
coordenadas deben ser conocidas. Las coordenadas del punto conocido deben estar
referenciadas al WGS-84, o en un sistema compatible, en caso de que se efectúe el
posicionamiento utilizando el GPS. En este caso, se determinan los elementos que
componen la línea base, o sea, X, Y, Z, que al ser añadidos a las coordenadas del
punto base, proporcionan las coordenadas del punto deseado. Tanto en el posicionamiento
absoluto como en el relativo, el objeto puede estar en reposo o en movimiento, dando
origen a las denominaciones de posicionamiento estático y dinámico.
5.2. Posicionamiento absoluto
En el posicionamiento absoluto se necesita sólo un receptor. Este método de
posicionamiento es el más utilizado en navegación de reducida precisión. El
posicionamiento instantáneo de un punto (tiempo real), utilizando la seudodistancia
derivada del código C/A (SPS), presenta precisión planimétrica del orden de 100 metros
(95% de los casos). Incluso si la recogida de datos sobre un punto fijo es de larga
duración, la calidad de los resultados no mejora significantemente, en razón de los errores
sistemáticos incluidos en el observable. Es posible incluir en el procesamiento, además de
la seudodistancia, la fase de la onda portadora en el procesamiento, en caso de que esta
medida esté disponible. Sin embargo, tal combinación no es una práctica muy utilizada en
el posicionamiento absoluto, debido a no proporcionar refinamiento de la solución. Por
tanto, el posicionamiento absoluto no se trata de un método utilizado para fines geodésicos
y topográficos. De cualquier forma se presentarán los fundamentos del método, pues el
mismo será útil para la presentación de algunos conceptos básicos incluidos en el GPS.
Considérese un receptor A, recogiendo seudodistancias de los satélites visibles.
Cada observación recogida genera una ecuación que compondrá el sistema de ecuaciones
representado por la expresión (4.6) del capítulo anterior. La ecuación de observación viene
dada de acuerdo con la ecuación (4.14), la cual debe ser linealizada siguiendo las líneas

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 73
presentadas en la expresión (4.41), resultando una ecuación lineal de la siguiente forma
(en este caso se ignora la dependencia del tiempo ):
)(}{ j
AA
j
AA
j
AA
j
A
j
A dtdtcZcYbXaSDE (5.1)
con j
ASD como la diferencia entre la seudodistancia observada entre la estación A y el
satélite j y la calculada en función de los parámetros aproximados. Se trata de una
ecuación con 4 incógnitas (XA, YA, ZA y dtA), exigiendo la presencia de, como
mínimo, cuatro satélites para obtener una posición instantánea (tiempo real). Cuando son
visibles sólo tres satélites, se puede obtener una posición bidimensional. Cuando el
receptor esté en reposo, se pueden procesar los datos en un ajuste secuencial, sin la
necesidad de la presencia de cuatro satélites.
5.2.1. Disminución de la Precisión
Los diversos DOPs (Dilution of Precision), frecuentemente utilizados en
navegación, se obtienen a partir del concepto de posicionamiento absoluto. El DOP
proporciona una indicación de la precisión de los resultados obtenidos. Éste depende
básicamente de dos factores:
la precisión de la observación de seudodistancia, expresada por el error
equivalente del usuario (UERE: User Equivalent Range Error), que se asocia
a la desviación típica de la observación (r), y
la configuración geométrica de los satélites.
La relación entre r y la desviación típica asociado al posicionamiento (P), se
describe mediante la siguiente expresión (Seeber, 1993)
P r
DOP (5.2)
En la literatura consultada, se encuentran las siguientes designaciones:
H = HDOP r para posicionamiento horizontal,
V = VDOP r para posicionamiento vertical,
P = PDOP r para posicionamiento tridimensional, y (5.3)
T = TDOP r para determinación de tiempo.
El efecto combinado de posición y tiempo se denomina
GDOP PDOP TDOP ( ) ( )2 2 (5.4)

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 74
El PDOP puede ser interpretado como el inverso del volumen V de un tetraedro
formado por las posiciones del usuario y de los satélites
PDOPV
1
(5.5)
En la Figura 5.1 se presenta una ilustración geométrica de la situación. Es el caso
típico del error en la intersección inversa clásica.
La mejor situación geométrica ocurre cuando el volumen se maximiza, lo que
implica un PDOP (ecuación 5.5) mínimo. A partir de la Figura 5.1 se puede observar que,
en la situación (a), los satélites están más dispersos que en relación a la situación (b),
donde se deduce que el volumen en (a) es mayor que en (b). Por tanto, el PDOP de (a) es
mejor que (b). En resumen se puede decir que cuanto menor sea el valor de los diferentes
DOPs, mejor será la configuración de los satélites para realizar el posicionamiento.
P
PDOP buenoP
PDOP malo
(a) (b)
Figura 5.1.: Geometría de los Satélites y PDOP
Las mismas conclusiones pueden derivarse a partir del concepto de ajuste de las
observaciones GPS, en particular en el análisis previo. La primera ecuación del grupo
(4.8) del capítulo anterior, o sea:
( )
X
0
2 A PAT 1 (5.6)
que proporciona la MVC de los parámetros. Las seudodistancias son consideradas de igual
precisión e independientes, presentando una desviación típica r. De esta forma, la matriz
de peso resultante es diagonal y, para el propósito de este análisis, igual a la matriz
identidad. Tratándose del análisis previo de los resultados, la expresión (5.6) puede ser
calculada antes de la recogida de datos. Para ello se acepta que el factor de varianza a
posteriori ( 0
2) sea igual a la varianza de las observaciones, o sea
r
2. La MVC de los
parámetros a estimar viene dada, aproximadamente, por:

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 75
( )X r 2 A AT 1
(5.7)
la cual contiene los siguientes elementos:
X r
xx xy xz xt
yx yy yz yt
zx zy zz zt
tx ty tz tt
2 (5.8)
donde ii representa la varianza de la variable en cuestión (i) y ij la covarianza entre las
variable i y j. La varianza de la determinación de una posición viene dada por:
P r xx yy zz
2 2 ( ) (5.9)
que corresponde a
P r
PDOP (5.10)
Para el caso de las componentes horizontales y verticales se tiene
respectivamente:
H r xx yy
2 2 ( ) (5.11)
y
V r zz
2 2 (5.12)
o sea:
H r
HDOP (5.13)
y
V r
VDOP (5.14)
En general se tiene:
GDOP diag A AT
( ) 1 (5.15)
La selección adecuada de valores de los diferentes DOPs para la definición de la
ventana de observación no es más crítica, en la actualidad, debido a que a partir del
momento en que la constelación GPS se hizo completa, los valores de los PDOPs son
relativamente bajos. En general, los valores alrededor de 3 e incluso mayores, según el
DOP utilizado, son adecuados para la mayoría de las aplicaciones. El análisis de los DOPs
también es importante en navegación, especialmente si se utiliza un receptor con

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 76
capacidad de rastrear solamente cuatro satélites. En este caso se deben seleccionar los
cuatro satélites que proporcionen mejor PDOP.
En las aplicaciones geodésicas y topográficas los valores DOPs son de menor
importancia, pues los receptores modernos son capaces de rastrear todos los satélites
visibles. Son, no obstante, útiles para el control de las observaciones y en las operaciones
de planificación de la toma de datos. En las aplicaciones geodésicas y topográficas se
utiliza el posicionamiento relativo y, en este caso, es de mayor importancia el análisis del
RDOP (Relative DOP), introducido por Goad en 1988 (Seeber, 1993). La Figura 5.2
muestra el número de satélites visibles y los PDOPs para una estación concreta y fecha
reciente determinada. Se puede observar que en esta zona es posible efectuar recogidas de
datos GPS con PDOP del orden de 5 durante 24 horas y que hay ciertos períodos con 9
satélites disponibles.
Figura 5.2.: Número de Satélites con PDOP y GDOP.
5.3. Posicionamiento Relativo
Para realizar posicionamiento relativo es necesario que el usuario disponga de dos o
más receptores. Sin embargo, con la llegada de los llamados Sistemas de Control Activos
(SCA, en estos sistemas los receptores rastrean continuamente los satélites visibles y se
puede acceder a los datos vía sistema de comunicación), un usuario con sólo un receptor
podrá efectuar posicionamiento relativo referido al sistema de referencia del SCA. Deberá,

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 77
para tal, acceder a los datos de una o más estaciones pertenecientes al SCA determinado, a
través de algún sistema de comunicación.
El posicionamiento relativo es susceptible de ser realizado utilizando una de las
siguientes observables:
seudodistancias,
seudodistancias suavizadas por la portadora, y
fase de la onda de la portadora junto con las seudodistancias.
En navegación, normalmente, se hace uso de las seudodistancias o
seudodistancias suavizadas por la portadora, pero se utilizan más frecuentemente las
seudodistancias. La técnica más popular en navegación se conoce como DGPS
(Diferential GPS), la cual puede proporcionar precisión del orden de 2 a 5 m, cuando se
hace uso de las seudodistancias. El DGPS tiene la capacidad de proporcionar
posicionamiento en tiempo real, aunque también pueda ser posprocesado. El
posicionamiento cinemático relativo, bajo la denominación de OTF (On The Fly) o RTK
(Real Time Kinematic), tiene la portadora como observable fundamental, presentando alta
precisión. Estos métodos serán presentados dentro del concepto de métodos de
posicionamiento relativo en tiempo real, junto con la técnica DGPS.
En los métodos estáticos, que utilizan como observable básica la portadora, se
puede alcanzar precisión centimétrica, o incluso milimétrica. Aunque se trate de un
método estático, se puede aplicar la técnica OTF en el procesamiento, reduciendo
sobremanera el tiempo de ocupación de las estaciones a rastrear. Se puede también utilizar
como observable la Seudodistancia pura o suavizada por la portadora, casos en que se
reduce la fiabilidad hasta el orden del decímetro.
Se encuentran también en la literatura GPS los métodos denominados estático
rápido, stop & go (pare y continúe), semi o seudocinemático, además de cinemático puro,
entre otros. Estos métodos son utilizados fundamentalmente para trabajos donde el
objetivo es la rapidez y no hay interés en la precisión de las coordenadas de la trayectoria.
Éstos se presentarán dentro del concepto de métodos rápidos.
Un resumen de los métodos a tener en cuenta dentro del posicionamiento relativo
señalan hacia las siguientes denominaciones:
Posicionamiento relativo estático,
Posicionamiento relativo en tiempo real (cinemático),
Posicionamiento relativo estático rápido.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 78
A continuación, se describen cada uno de ellos.
5.3.1. Posicionamiento Relativo Estático
El observable normalmente usado en el posicionamiento relativo estático es la
doble diferencia de fase de la portadora, aunque también pueda utilizarse la doble
diferencia de seudodistancia, o incluso una combinación de ambas. Los casos en que se
tiene la fase de la portadora como observable fundamental son los que presentan mejores
resultados en términos de precisión. Se trata de la técnica más utilizada en
posicionamiento geodésico y topográfico. En este tipo de posicionamiento, dos o más
receptores rastrean los satélites visibles por un período de tiempo que puede variar de
decenas de minutos, hasta algunas horas. El caso que incluye cortos períodos de ocupación
(hasta diez minutos), será tratado como método rápido.
Como en el posicionamiento relativo estático el período de ocupación de las
estaciones es relativamente largo, sólo las dobles diferencias de fase de la portadora serán
incluidas como observables. Como la precisión de la fase de la portadora es muy superior
a la de la seudodistancia, esta última no mejora los resultados significativamente cuando el
período de recogida de datos sea largo. Incluso así, las seudodistancias deben estar
disponibles, pues son utilizadas principalmente en el preprocesamiento para valoración del
error del reloj del receptor.
Considerando dos receptores r1 y r2, lo que constituye una simple línea base, la
doble diferencia de fase (ecuación 4.24) se reformula ahora en la forma lineal utilizando la
expresión (4.41) y asumiendo que los efectos de la refracción ionosférica y troposférica
fuesen debidamente eliminados u omitidos,
1,2
1,2
1,2
1,2
0 1
1,2
1 1
1,2
1 1
1,2
1
2 2
2
2 2
2
2 1,2
1,2
[( ) ( ) ( )
) ( ) ( ),1 ,1
a X b Y c Z
X b Y c Z N vDD
+
+ (a 2
2,1
(5.16)
donde:
a a a b b b c c c
N
i i i i i i i i i
1,2 1 2 1,2 1 2 1,2 1 2
1,2
1,2
0 1,0
1
2 0
1
1,0
2
2 0
2
1,2
1,2
0
; ;
[ ], ,
para i = 1,2
(5.17)
Obsérvese que la expresión (4.24) del capítulo anterior viene dada en unidades de
ciclos y fue convertida en unidad métrica en la ecuación (5.16).

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 79
Asumiendo que los datos fueron recogidos durante k épocas en las dos estaciones
(1 y 2), incluyendo los mismos n satélites, el modelo linealizado de las dobles diferencias
de fase puede ser representado por:
E
L
L
L
A I
A I
A I
R
N
k
N
N
NK
{...
}... ...
1
2
1,2 1
1,2 1
1,2 1
1,2
1
2
(5.18)
donde:
Li es un vector de orden ((n-1)x1) de las diferencias entre las dobles
diferencias observadas (metros) y las calculadas en función de los
parámetros aproximados (segunda ecuación de 5.2),
Ai1,2 es una matriz de orden ((n-1)x6) compuesta por los coeficientes de las
correcciones a las coordenadas aproximadas de las estaciones 1 y 2,
IN-1 es la matriz identidad de orden (n-1)x(n-1), que contiene los
coeficientes de las ambigüedades,
R1,2 es un vector de orden (6x1) de las correcciones a las coordenadas
aproximadas de las estaciones 1 y 2, es decir:
R X Y Z X Y ZT
1 2 1 1 1 2 2 2, [ , , , , , ]
N es un vector de orden ((n-1)x1) de las ambigüedades.
La matriz de pesos P (ecuación 4.7) viene dada por la inversa de la MVC de las
observaciones de dobles diferencias. Si las observaciones de dobles diferencias se asumen
como no correlacionadas entre épocas, la MVC será un bloque diagonal, y la matriz P se
obtiene, simplemente, por la inversión de cada bloque separadamente. En un momento
cualquiera, cuando es utilizado el método del satélite de referencia, cada bloque será del
tipo de la ecuación (4.35). La inversa de la matriz, en este caso particular, viene dada por
(Hofmann-Wellenhof et al, 1992)
)1(1...1
...
...1)1(1
...11)1(
2
1
n
n
n
nPi (5.19)

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 80
donde (n-1) es el número de dobles diferencias consideradas en ese momento. En la
práctica, no existe necesidad de utilizar algoritmos específicos para el cálculo de la inversa
de una matriz, simplemente es la resultante de algunas operaciones matemáticas incluidas
en el proceso. Analizando las ecuaciones (5.20), (4.35) y (4.7) se puede concluir que la
varianza de peso a priori (0
2) ha sido tomada igual a la varianza de la pura observación
de fase (2).
El modelo representado por la ecuación (5.18) tiene solución, es común, no
obstante, fijar las coordenadas de una de las estaciones en el ajuste. Esto puede efectuarse
mediante eliminación de las columnas de la matriz A1,2 relacionadas con las coordenadas
en cuestión. Otra forma es introducir órdenes en el modelo (5.18), a partir de las
ecuaciones de observación posicionales (seudo-observaciones) con peso suficiente para
mantener las coordenadas fijas en el ajuste. Tal procedimiento es el preferido, pues es
más fácil de ser implementado.
En este proceso, debido a que la duración de la recogida de datos es relativamente
larga, las ambigüedades, salvo algunos problemas no esperados, se solucionan
naturalmente en el proceso de ajuste. Esto se debe a la alteración de la geometría de los
satélites durante la sesión, reduciendo la correlación entre las componentes de la base y
ambigüedades incluidas en el modelo (5.18), lo que facilita la fijación de las mismas. La
figura 5.1 muestra la precisión de las coordenadas X, Y, Z y de las ambigüedades,
representadas para una línea base de aproximadamente 10 Km.
En esta figura se puede observar que, después de un cierto período de recogida de
datos (20-25 épocas), la precisión, tanto de las coordenadas, como de las ambigüedades, se
estabiliza. A partir de entonces las observaciones adicionales se prestan a proporcionar
una mayor fiabilidad en la solución. Para bases de longitud diferentes, el comportamiento
ilustrado en la figura 5.1 se debe alterar un poco. También se esperan alteraciones cuando
hay cambio en la configuración de los satélites.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 81
Fig. 5.1: Precisión de Coordenadas y Ambigüedades en función del tiempo
5.3.2. Posicionamiento Relativo en Tiempo Real
En el posicionamiento relativo en tiempo real, además de los dos receptores
normalmente empleados en el posicionamiento, uno de los receptores debe recibir, aparte
de las observaciones por él recogidas, informaciones adicionales vía algún sistema de
comunicación. Estas informaciones pueden ser las propias observaciones recogidas,
simultáneamente, en otro receptor o estación, caso denominado en la literatura como
cinemático puro (Pure Kinematic Method), o correcciones diferenciales, método
denominado como DGPS (Diferencial GPS).
(a) GPS Diferencial (DGPS)
El DGPS fue desarrollado para las aplicaciones en navegación necesitando de
mejor precisión que la ofrecida por el GPS cuando se utiliza el SPS en modo absoluto. El
concepto de DGPS abarca el uso de un receptor instalado en una estación con coordenadas
conocidas, rastreando todos los satélites visibles. El procesamiento de los datos en esta
estación (posicionamiento absoluto) permite que se calculen correcciones posicionales o
de seudodistancias. Las correcciones a las coordenadas X, Y, Z pueden ser
determinadas, pues se conocen las coordenadas de la estación base. Las correcciones de
las seudodistancias se basan en las diferencias entre las seudodistancias observadas y las
calculadas a partir de las coordenadas de los satélites y de la estación base. Con la estación
base localizada en las proximidades de la región de interés, hay una fuerte correlación
entre los errores calculados en la estación base y los errores de la estación móvil. De esta
forma, si el usuario recibe tales correcciones, podrá corregir sus posiciones o las
seudodistancias observadas, dependiendo del método de corrección adoptado. La Figura
5.2 ilustra el concepto de DGPS.
0 5 10 15 20 25 30
0
1
2
3
4
5
X Y Z
Desvi
o-P
atr
on (
m)
Epocas de 15 seg0 5 10 15 20 25 30
0
5
10
15
20
E
F
G
H
I
Desvio
-Patr
on (
Cic
los)
Epocas de 15 seg
Coordenadas Ambiguedades

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 82
La aplicación de correcciones en las posiciones es el método más fácil de utilizar
en DGPS, pero el mismo está significativamente afectado por la SA si cualquiera de los
satélites no es rastreado simultáneamente en las dos estaciones. En estos casos, los
resultados presentaran una calidad inferior a lo usual.
SATÉLITE GPS
USUARIO
ESTA CIÓN BASE
Figura 5.2: Concepto básico de GPS Diferencial (DGPS)
Cuando se utilizan correcciones para las observaciones de seudodistancias, no
hay necesidad de que el usuario rastree la misma constelación de satélites presente en la
estación base, pues sólo aplicará las correcciones en las seudodistancias de los satélites
efectivamente rastreados. Si alguno de los satélites rastreados no presenta correcciones, y
hay un número suficiente de satélites para efectuar el posicionamiento, es aconsejable no
utilizar tales satélites.
Otro aspecto importante en el DGPS es la transmisión de las correcciones. Para
evitar desajustes en el tiempo, el RTCM-104 (Radio Technical Committee for Marine
Service), introdujo la variación de la corrección en función del tiempo en los mensajes de
corrección tipo. En este caso la corrección de la seudodistancia tiene la siguiente forma:
p t p t p t t t( ) ( ) ( ) * ( ) 0 0 0
(5.20)
donde p(t) es la corrección a ser aplicada,
p(t0) es la corrección en el mensaje
( )p t0
es la razón de variación de la corrección, también incluida en el
mensaje.
El término t0 es el tiempo de referencia para las correcciones.
La aplicación del DGPS en navegación tiene una limitación en lo que respecta al
área de cobertura de las correcciones. A medida que se aparta de la estación base, ocurre
una rápida degradación de su fiabilidad, debido a decorrelación espacial.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 83
Actualmente se encuentra en desarrollo, en algunos países, una expansión de la
funcionalidad del DGPS, cuya denominación es WADGPS (Wide Area DGPS). En este
caso se utilizan estaciones múltiples de referencia, junto con el modelado de varios
factores afectados. En los Estados Unidos ya operan desde algún tiempo algunos sistemas
transmitiendo correcciones a través de redes FM, el patrón utilizado para las correcciones
es el RTCM-104.
Como se ha comentado, este sistema está materializado, en España, con el proyecto
RECORD, pasada ya la fase de implantación en España, podrá en el futuro servir como
una red tipo WADGPS y proveer correcciones, a través del sistema RASANT, para los
usuarios interesados.
(b) Método Dinámico
En este método, también llamado cinemático, se asume que el observable
fundamental es la fase de la onda portadora. Hay una gran cantidad de aplicaciones que
necesitan las coordenadas de la trayectoria del receptor GPS con alta precisión. Un
ejemplo interesante para las actividades de cartografía, tiene que ver con los vuelos
fotogramétricos que utilizan GPS para determinar las coordenadas del centro perspectivo
de la cámara en el instante de toma de la foto. Se trata, no obstante, de un caso que se
puede efectuar en posprocesamiento. En algunas aplicaciones marítimas o en la aviación,
se necesitan posiciones en tiempo real. Es fácil comprender que, en estos casos, la
producción de pérdida de ciclos sin la posibilidad de recuperación, mientras se está en
movimiento, no pueda aceptarse. Se debe pues disponer de métodos capaces de corregir
las pérdidas de ciclos o solucionar las ambigüedades en pleno movimiento. Esta técnica se
denomina solución de la ambigüedad OTF (On The Fly: en el aire).
En la técnica OTF para aplicaciones en tiempo real, las ambigüedades deben ser
resueltas inmediatamente tras la recogida de datos. Como se trata de posicionamiento
relativo, en el que se utilizan las observaciones de dobles diferencias, las observaciones
recogidas en la estación base deben ser transmitidas a la estación móvil, de forma
diferente a la técnica DGPS, donde se transmiten sólo correcciones. Esto exige un sistema
de comunicación con gran capacidad de transmisión.
Dentro de la técnica OTF hay varios métodos disponibles para la solución de la
ambigüedad, pudiéndose citar el denominado LAMBDA (Least square AMBiguity
Decorrelation Adjustment), FARA (Fast Ambiguity Resolution Approach), tratamiento
como red neural; (Beutler, 1990; Teunissen, 1995) entre otros. Los métodos se basan, en
general, en la estimación de mínimos cuadrados con algoritmos de búsqueda. Como las
ambigüedades se solucionan en tiempo real, esto equivale a que el usuario disponga de

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 84
distancias entre el receptor y satélites con precisión milimétrica, permitiendo
posicionamiento con fiabilidad del orden de 10 cm o mejores (Seeber, 1993).
Es de destacar que estos métodos no siempre proporcionan las soluciones de la
ambigüedad correctamente, exigiendo medios para analizar la calidad de los resultados.
Las investigaciones aún están desarrollándose y los sistemas actualmente capaces de
proporcionar solución OTF aún tienen costes bastante elevados. Conviene llamar la
atención sobre los métodos que usan el concepto OTF, aunque desarrollados con vista a
aplicaciones cinemáticas, pueden muy bien ser utilizados en aplicaciones estáticas,
reduciendo sobremanera el tiempo de ocupación de las estaciones con las que se trabaja.
5.3.3. Posicionamiento Relativo Estático Rápido
En esta sección serán abordados los métodos de posicionamiento denominados
seudocinemático y semicinemático. Dentro de esta clasificación estamos incluyendo el
método stop and go (para y continúa), ya que aparece en la literatura como un método de
posicionamiento semicinemático. El término estático rápido tal vez no sea totalmente
adecuado para el conjunto de métodos que se presentan en este apartado, pero como
durante la toma de datos se debe parar en la estación, por lo menos para introducción de la
identificación de la misma, tal condición tal vez justifique la nomenclatura. El objetivo es
agrupar los métodos con características similares a fin de evitar la adopción de términos
diferentes para el mismo procedimiento.
Se presentan inicialmente los métodos denominados seudocinemático en Seeber,
(1993) y semicinemático en Teunissen, (1991). Se trata del posicionamiento en que hay
reocupación de una o todas las estaciones. Se sabe que para solucionar la ambigüedad, sin
la aplicación de los métodos rápidos (OTF), se necesita un período de recogida de datos
relativamente largo, debido a la necesidad de alteración de la geometría de los satélites
rastreados. En realidad, solamente las primeras y últimas observaciones contribuyen
significativamente a la solución. La concepción del método se basa entonces en la
recogida de datos durante, por lo menos, dos períodos en la misma estación. Las dos
recogidas deben estar separadas por un intervalo de tiempo suficientemente largo (20-30
minutos) para proporcionar alteración en la geometría de los satélites. Durante este
intervalo, otras estaciones pueden ser ocupadas por un período de tiempo relativamente
corto. El método requiere que el receptor continúe rastreando durante las visitas a las
estaciones, circunstancia que exige una cuidadosa planificación de la recogida antes de la
ejecución. El modelo matemático se representa por el siguiente sistema lineal:

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 85
E
L
L
L
A I
A I
A I
A I
X
X
X
Nk
k
K
k
{...
}
...
...
...
...
...
...
1
2
1
2
1
1
2
1
0 0
0 0
0 0
0 0
(5.21)
Solamente la primera estación fue reocupada, en este caso, en el momento k. Otra
posibilidad sería la reocupación de todas las estaciones.
Hay aún otra opción, en la cual se puede desconectar el receptor durante el
traslado de una estación a otra; pero todos los puntos deben ser reocupados. El punto
inicial debe ser visitado nuevamente después de un intervalo que permita el cambio de la
geometría de los satélites (30-60 minutos), prosiguiéndose con la reocupación en los
demás puntos. En este caso, los dos archivos de datos recogidos en una misma estación,
pero en instantes diferentes, son considerados como únicos, con pérdida de ciclos entre
ellos, los cuales deben ser corregidos por técnicas de dobles o triples diferencias.
Considerando las pérdidas de ciclos corregidas adecuadamente, lo cual no siempre es
posible, el modelo se presenta de la siguiente forma:
E
L
L
L
L
L
L
A I
A I
A I
A I
A I
A I
X
X
X
N
k
k
k
k
k
{
...
...
}
...
...
...
...
...
...
...
...
...
,1
,1
,
,
,1
,1
,
,
1,1
2
1,2
2 2
2
1,1
2
1,2
2 2
2
1
2
0 0
0 0
0 0
0 0
0 0
0 0
(5.22)
En esta expresión, el segundo índice indica si es la primera o segunda ocupación,
de un total de k estaciones observadas.
El método stop and go se basa en determinar rápidamente las ambigüedades y
mantenerlas durante el trabajo con las estaciones de interés. La antena se mantiene
recogiendo datos sobre la estación que trabaja por un breve período de tiempo, el
necesario para la recogida de la identificación de la estación y montaje de la antena. Por
tanto, la cuestión fundamental es la determinación de la ambigüedad antes de iniciar la
recogida de datos. Las principales técnicas que han sido extensamente utilizadas son:

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 86
1- Determinación de una base con larga ocupación, antes de iniciar el método stop
and go,
2- Corto período de ocupación sobre una base conocida, y
3- Cambio de antena.
El primer caso se trata del posicionamiento relativo estático, pudiéndose por tanto
aplicar la técnica OTF para la solución inicial de la ambigüedad. No obstante, si tal opción
estuviese disponible, sería más conveniente también utilizarla en las demás estaciones,
evitando algunos problemas del método stop and go. En el segundo caso, como se
conocen las coordenadas de dos estaciones, los parámetros a determinar en el ajuste son
las ambigüedades, las cuales pueden solucionarse rápidamente. El tercer método ha sido
extensamente utilizado, pues aparte de ser preciso, rápido y fiable, no requiere el
conocimiento de una línea base próxima al lugar. La figura 5.3 ilustra el procedimiento.
El método consiste en instalar uno de los receptores en una estación de la zona de
recogida de datos, la cual posee coordenadas conocidas, y el otro en una estación auxiliar
próxima (2 a 5 metros). Se recogen datos por un período de 1 minuto y después se
cambian las dos antenas, sin perder el contacto (lock on) con los satélites, y se recogen
nuevamente datos por un período de 1 minuto. No habiendo pérdida de ciclos, las
ambigüedades antes y después del cambio de antenas son las mismas. Combinando las
ecuaciones de observación, comprendidas en el primer período de recogida de datos, con
las del período siguiente, pueden ser determinados los valores de las ambigüedades. En el
caso de que la geometría fuese alterada al hacer el cambio de antenas, las ambigüedades
pueden ser solucionadas rápidamente sin aplicar técnicas de búsqueda, tipo OTF.
Estación BaseEstación
auxiliar
Estaciones
Levantadas
Fig. 5.3: Posicionamiento Relativo Rápido con Cambio de Antena

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 87
Si hubiera pérdidas de ciclos durante el desplazamiento, el trabajo debe ser
reiniciado, partiendo, por ejemplo, del último punto observado, el cual sería la estación
base. Se trata por tanto de un método adecuado para áreas no sujetas a las obstrucciones de
la señal. En estos casos es esencial que el receptor informe acerca de la existencia de
pérdidas de ciclos, pues esto puede ser crucial en cierto tipo de trabajos.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 88
6. ASPECTOS PRÁCTICOS Y ALGUNAS
APLICACIONES DEL GPS
6.1. Introducción
En este capítulo se presentan algunos aspectos prácticos relacionados con el GPS,
principalmente en lo que concierne a la planificación, recogida y procesamiento de datos.
Los asuntos tratados en los capítulos anteriores han intentado proporcionar al lector la
base teórica necesaria para que, al ejecutar trabajos relacionados con el GPS, tengan un
conocimiento razonable de los matices que integran el proceso. Agotar todos los aspectos
que abarca no es posible y no es la intención, pues en cada proyecto surgen nuevos
elementos a considerar. También se incluye, en este capítulo, una breve descripción de las
aplicaciones GPS, en algunos casos, esta descripción se presentará junto con ciertos
aspectos prácticos, teniendo en cuenta que para abordar aspectos se debe considerar la
aplicación en cuestión.
6.2. Proceso del Proyecto GPS
6.2.1. Planificación y Reconocimiento
En la planificación, previa a la recogida de datos GPS, tal como en cualquier otro
método convencional, es esencial tener disponible la documentación cartográfica más
reciente de la zona de trabajo. Ésta dará apoyo en la tarea de definición de los puntos que
van a ser observados y la definición de los trayectos que se seguirán, entre otras
cuestiones. La condición y existencia del apoyo geodésico o topográfico, en la zona de
recogida, debe ser verificada a fin de definir los vértices del sistema de referencia elegido
que se usarán como estaciones base de origen. Considerando la dimensión territorial de
España y la distribución del apoyo básico, muchas veces tales vértices estarán localizados
a una gran distancia de la zona de trabajo y su acceso puede ser dificultoso. Se trata, por
tanto, de una cuestión fundamental en el estudio de los costes del proyecto.
La planificación de la toma de datos con vistas al transporte de coordenadas para
las estaciones bases, a partir del apoyo fundamental, depende de diversos factores, entre
ellos la precisión exigida en la recogida, equipos disponibles, etc. Si el usuario dispone de
dos equipos de doble frecuencia y la precisión exigida fuera decimétrica, el transporte de
coordenadas de la red geodésica básica para la región de trabajo podrá ser realizada
únicamente con una línea base, uniendo un vértice de la red geodésica básica y otro en la
zona de trabajo. La duración de la recogida de datos, dependiendo de las distancias

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 89
implicadas puede variar de 30 minutos a 2 horas o más, para líneas bases de hasta 500 km.
Usuarios con equipos de frecuencia simple (portadora y código), y que necesiten precisión
decimétrica, deberán ejecutar la tarea en cuestión con líneas bases de, como máximo, 30
km cada línea y con tiempo de recogida de datos mayor de una hora. Para garantizar la
fiabilidad del trabajo, las coordenadas de las estaciones bases deberán ser obtenidas
teniendo como referencia más de un vértice de la red fundamental.
También, con respecto a la fase de obtención de las coordenadas de puntos base en
la zona de trabajo, se deben tener en cuenta las posibilidades futuras, teniendo en cuenta
que, en breve, la red geodésica básica española, es decir, la Red de primer orden y la Red
de Orden Inferior (ROI), dispondrá de coordenadas GPS, o sea, deberá estar operativa, y
de echo ya lo está en algunos vértices. La misma será bastante útil para usuarios que
dispongan de, por lo menos, un receptor de doble frecuencia, cuyos datos podrán ser
combinados con los de la estación de la red geodésica básica más próxima, permitiendo
conectar el punto de interés al sistema de referencia de la red geodésica básica de forma
bastante eficiente. Ello es el resultado de la innecesaria ocupación de puntos de la red
fundamental (red clásica), normalmente situados en lugares de difícil acceso.
Evidentemente el usuario interesado en esta posibilidad deberá tener acceso a los datos de
las estaciones que dispongan de coordenadas GPS de la red geodésica.
En la planificación para la toma de datos de estaciones GPS, el responsable de tal
tarea debe tener en mente las facilidades ofrecidas por este sistema de posicionamiento, en
relación con los métodos convencionales, donde existía la necesidad de implantar puntos
básicos en una región adecuada para observaciones angulares. Con el GPS lo ideal es que
los puntos estén situados en lugares de fácil acceso, principalmente mediante automovil
apropiado o incluso motocicleta, evitando desplazamientos innecesarios y fatigosos.
Una vez definidos los puntos básicos o de apoyo, debe establecerse la planificación
de las observaciones. Este fue un factor preponderante durante la fase experimental del
GPS, pues, debido al limitado número de satélites, era necesario saber a qué horas estaban
visibles en la zona; La planificación de las observaciones, en estos casos, dependía
esencialmente de la disponibilidad de satélites. En la actualidad, con el sistema completo,
a cualquier hora del día o de la noche, se tienen, como mínimo, cuatro satélites visibles.
Por tanto, el plano de observación es prácticamente independiente de la configuración del
sistema GPS, y se podrá definir una planificación bastante óptima, teniendo en
consideración eficiencia, precisión, costes y fiabilidad interna (capacidad para detectar

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 90
errores groseros). Aunque en la actualidad no es esencial, en esta etapa es posible
confeccionar gráficos que muestren los diversos DOPs, elevación de satélites sobre el
horizonte del lugar, etc.
Nótese que el modo de posicionamiento a utilizar, tratándose de posicionamiento
para fines geodésicos o topográficos, es el relativo, en razón de la precisión exigida. En la
implantación de los puntos básicos, a partir de los cuales se basarán las recogidas de datos
locales, se utiliza esencialmente el posicionamiento relativo estático. La recogida de los
puntos dentro de la zona de interés, dependiendo de la precisión exigida, podrá ser
efectuada usando uno de los métodos presentados dentro del posicionamiento relativo
estático rápido. La duración de la recogida de datos será definida en función de la
precisión deseada, longitud de la base y de los equipos y software disponibles.
En la planificación que incluya la recogida de datos de larga duración, se debe
siempre considerar, en el establecimiento del plan de trabajo, la capacidad de
almacenamiento de datos, lo cual es función del número de puntos observados y del
tiempo de vida útil de carga de las baterías de los receptores.
El reconocimiento es también una fase muy importante en las recogidas de
precisión geodésica y topográfica (mm a m) utilizando el GPS. Para todos los métodos de
posicionamiento aplicables, se deben verificar las condiciones locales intentando
identificar objetos que puedan obstruir señales, producir multicamino, etc. Como regla
general, la línea de visión por encima del horizonte debe estar libre en todas las
direcciones. Las obstrucciones deben ser registradas por medio de un diagrama en la hoja
de campo, intentando auxiliar en la definición de planificación de las observaciones.
Como los efectos de la refracción troposférica son críticos para ángulos de elevación muy
bajos, se adopta, en general, un ángulo de elevación de entre 10º y 150, lo que puede
también eliminar algunos problemas relacionados con la obstrucción de la señal. En
algunos tipos de recogida de datos, por ejemplo, en cartografía urbana, no siempre es
posible recoger todos los puntos suficientes y necesarios, debido a causas diversas, pero
esencialmente debido a que los puntos están en lugares imposibles de ser recogidos
mediante el GPS ( debajo de un árbol, al lado de un edificio, etc.). En estos casos, es
esencial disponer de equipos convencionales de topografía clásica para completar la
recogida. Durante esta fase, todas las incidencias e informaciones esenciales deben ser
registradas en la hoja de campo, a saber: nombre de la estación y código de identificación,

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 91
descripción de la localización, coordenadas aproximadas, tipo de acceso (vehículo,
carretera, etc.), diagrama de obstrucciones, etc.
6.2.2. Recogida de datos
El equipo que participa en la recogida de datos debe ser capaz de efectuar todas las
operaciones necesarias para la ejecución del trabajo. Las mismas incluyen desde las más
simples, como el montaje y centrado del trípode, medida de la altura de la antena, hasta las
un poco más elaboradas, abarcando operaciones del receptor y recogida de atributos. Es
necesario un conocimiento adecuado del equipo a utilizar, ello podrá auxiliar en la
identificación y corrección de algunos problemas que puedan ocurrir durante las
actividades de campo. Hay que tener un cuidado especial con la lectura y registro de la
altura de la antena, en caso de que la misma no se mantenga constante durante el trabajo.
Este es un tipo de error bastante común en los trabajos GPS, lo cual puede no ser
detectado, en caso de que la estrategia de recogida de datos no considere todos los
aspectos de fiabilidad.
Algunos receptores modernos disponen de colector de datos que permite el registro
de los atributos de los puntos a estudiar. Esto exige que el técnico encargado de esta tarea
tenga conocimientos sobre la descripción de los datos gráficos. Para ayuda de los
interesados, se presentan, de forma bastante simple, algunos conceptos esenciales.
Se puede decir que una “forma”- rasgo o aspecto característico distintivo de un
objeto -, es un dato geográfico sobre el cual se desea recoger informaciones. Las clases o
tipos de formas normalmente disponibles en los colectores de datos incorporados a los
receptores GPS son puntos, líneas y áreas, y las cuestiones acerca de la forma constituyen
sus atributos, la localización, por ejemplo, es un atributo de posicionamiento en la
superficie terrestre, la cual se obtiene vía GPS.
En la realización de la recogida, el proceso se inicia con la introducción del
nombre de la forma, clase de la misma y los atributos deseados, seguidos por el comando
de almacenamiento de datos.
En campañas de larga duración es imprescindible disponer, en la zona de trabajo,
de un microordenador para almacenaje y análisis inicial de los datos, preferentemente un
ordenador portátil, el cual podría formar parte de los equipos de campo.
Evidentemente al comienzo de la recogida, y una vez puesto en estación el equipo,
lo inmediato es definir, aparte del nombre del trabajo y misión correspondiente, los
parámetros que van a regir durante las observaciones, como son: la mascara de elevación,

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 92
el intervalo de almacenamiento de los datos ( épocas) u otros necesarios para efectuar
correctamente los trabajos a realizar.
6.2.3. Procesamiento de los Datos
Las actividades que abarcan el procesamiento de los datos recogidos son tan
importantes como las descritas anteriormente. Ellas incluyen, en especial, el análisis de la
calidad de los resultados obtenidos, lo que requiere un técnico con conocimientos
apropiados para realizar esta tarea. Los softwares que acompañan a los equipos
proporcionan incluso sugerencias sobre los resultados más adecuados, sin embargo esto no
es suficiente cuando se pretenden realizar trabajos de buena calidad.
El primer paso en el procesado de los datos es la transferencia de estos desde el
receptor al disco duro del ordenador, a través del software que acompaña al equipo. Los
archivos contenidos en una sesión son los de los observables y el archivo principal de
datos (DAT). Existen, además de éste, los archivos de efemérides (EPH), de mensajes, que
contiene, por ejemplo, la identificación de la estación y altura de la antena y los de
coeficientes para corrección de la ionosfera (ION). Un buen procedimiento para asegurar
que las identificaciones de las estaciones y alturas de la antena son correctas, es la
preparación, durante la toma de datos, de un croquis de campo que contenga todas las
informaciones relevantes, las cuales se verifican en esta fase.
El paso siguiente es el procesado individual de las líneas base, aunque algunos
softwares permitan, en esta etapa, la ejecución del proceso individual en modo absoluto.
Normalmente en los programas comerciales es posible realizar las tareas automáticamente,
sin interferencia del operador. El procesado puede ser realizado base a base o a toda la red
en conjunto. Si sólo fueran utilizados dos receptores en la toma de datos, la única opción
es la primera. La segunda se refiere al caso en que más de dos receptores participaran en la
recogida, aunque, no todos los softwares disponen de esta opción. De esta forma, es
común realizar el procesado individual de las bases que componen la red, lo que no es
matemáticamente correcto pues lo lógico es procesar en bloque.
Cuando la recogida de datos se realiza base a base, y varias bases forman una red,
los resultados obtenidos a partir de las bases individuales permiten efectuar algún tipo de
análisis para evaluar la calidad de los resultados. Si, por ejemplo, las bases forman un
polígono cerrado, se puede evaluar su error de cierre, que debe ser un valor pequeño (1 a 3
ppm). Las diferentes composiciones de bases también pueden ser combinadas en un
ajuste. Las cantidades estadísticas derivadas del proceso de ajuste de la red y bases

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 93
individuales (desviación típica, factor de varianza a posteriori) son las informaciones más
importantes para analizar la calidad del estudio.
Cuando la recogida de datos se realiza con más de dos receptores, combinados para
proporcionar posibilidades de detectar y localizar posibles errores internos y externos (red
con buena fiabilidad), se trata de una red de alta precisión, en este caso, se aplican
diversos tipos de análisis de fiabilidad, además de la detección y localización de errores.
Los análisis citados abarcan aspectos relacionados con la precisión de la red.
Cuando se desea evaluar la exactitud, debe formar parte del estudio, una o más estaciones
con coordenadas conocidas, en un nivel de calidad igual o superior al que se pretende
determinar, cuestión bastante improbable dada la calidad de las redes nacionales. Las
discrepancias entre los valores conocidos y calculados indicarán el nivel de exactitud
alcanzado. Se trata, por tanto, de un aspecto a tener en cuenta durante la planificación de
las observaciones.
Otro aspecto contenido en el análisis de la calidad de los resultados puede
realizarse a partir del procesado base a base. Este análisis abarca las soluciones de triples
diferencias (TRP), dobles diferencias con ambigüedad (float) real (FLT) y dobles
diferencias con ambigüedad forzada (fixed to integers) o fija (FIX). En condiciones
normales es de esperar que la solución TRP proporcione resultados de peor calidad en
términos de desviación típica de las coordenadas, los cuales mejoran en la solución FLT.
Si la solución FIX se obtiene correctamente, la precisión de las coordenadas será aún
mejor que la de la solución FLT. Para obtener la solución FIX se debe definir y probar un
conjunto de vectores de ambigüedades definidos como probables candidatos. La solución
más probable es aquella que proporciona factor de varianza a posteriori 0
2(ecuación
4.13) mínimo. Una cuestión a tener en cuenta es si el segundo mejor conjunto nos
proporciona un valor de 0
2 muy próximo a la solución escogida, en el caso en que no
hubiera una buena aproximación entre los dos conjuntos, podría conducir a resultados
incorrectos. Para verificar esta condición, se calcula la razón entre los valores de 0
2 del
segundo con el del primer conjunto de candidatos. Esta estrategia se denomina ratio test.
Si el valor de la razón fuese mayor que 3, la solución escogida tiene alta probabilidad de
ser la correcta, en caso contrario, es más aconsejable adoptar la solución FLT. Conviene
resaltar que cuanto mayor es el valor de la razón, más fiable será la solución. En términos
estadísticos, esta razón sigue la distribución F (Snedecor), pues se trata de la razón entre
dos varianzas.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 94
Una vez que el procesamiento se acepta, se debe efectuar la transformación de
coordenadas de WGS84 (o Datum del GPS) al sistema local, que en nuestro caso es el
ED50 (Datum adoptado en España). Esta transformación fue presentada en el capítulo 2.
Como normalmente los datos recogidos intentan apoyar proyectos de ingeniería,
cartografía, etc., las coordenadas estimadas deben ser transformadas en coordenadas
planas, en general a la proyección, como puede ser la UTM (Universal Transversal
Mercator), o simplemente coordenadas locales. Para el procesamiento de estos datos se
debe disponer de un programa para ejecutar la transformación correspondiente.
Como etapa final de una campaña se debe producir un informe que contenga todas
las informaciones pertinentes a la misma.
6.3. Aplicaciones del GPS
El GPS está revolucionando todas las actividades en cuanto a posicionamiento de
puntos de cualquier aplicación. Junto con los sistemas de comunicación se están creando
nuevos conceptos de posicionamiento, los llamados sistemas activos. Es difícil enumerar
actividades que necesiten de posicionamiento que no estén relacionadas, o en fase de
relacionarse, con el GPS. Por tanto, las aplicaciones del GPS son innumerables, lo que
vuelve imposible relatarlas todas. Conviene recordar también que el GPS es extensamente
utilizado en la transferencia de tiempo, para lo cual existen equipos exclusivos para este
fin.
A continuación se relacionan algunas actividades donde el GPS ha sido utilizado
extensamente, seguidas de algunas descripciones pormenorizadas de algunas aplicaciones:
Navegación terrestre, aérea y marítima, a nivel global y regional,
Establecimiento de redes geodésicas y topográficas locales, regionales,
continentales y globales (activas y pasivas),
Estudios topográficos para fines cartográficos, apoyo fotogramétrico,
detección de deformaciones,
Nivelación expedita y de precisión,
Etc..

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 95
6.3.1. La Red Global IGS
El IGS (International Geodynamics Service) es un servicio internacional
permanente establecido en 1990 por el IAG. Los objetivos principales del IGS son
(Mueller, 1994): (i) proveer a la comunidad científica de órbitas de los satélites GPS
altamente precisas, (ii) proveer parámetros de rotación de la Tierra de alta resolución, (iii)
expandir geográficamente el ITRF mantenido por el IERS y (iv) monitorizar globalmente
las deformaciones de la corteza terrestre. Forma parte del IGS una red global, con más de
75 estaciones GPS, rastreando continuamente los satélites GPS. Todos los receptores son
de doble frecuencia, con capacidad de obtener los cuatro observables.
Los centros que componen el IGS están divididos en tres categorías: operacional,
regional y global. Los centros operacionales están en contacto directo con las estaciones
de rastreo, efectúan el control de calidad de las observaciones recogidas y transmiten los
datos recogidos al centro regional más próximo. Los centros regionales recogen los datos
de varios centros operacionales, mantiene un archivo de los mismos, además de
transmitirlos a uno de los tres centros de datos globales, los cuales intercambian datos
entre ellos a fin de mantener los mismos archivos de datos. Estos datos quedan disponibles
para usuarios e investigadores, entre ellos los de los centros de análisis del IGS, los cuales
procesan los datos regularmente intentando determinar parámetros de rotación de la Tierra
y órbitas GPS altamente precisas. La oficina central del IGS funciona en el laboratorio del
centro de análisis del IGS, localizado en California (EE.UU.).
Cualquier usuario que disponga de recursos para acceder a Internet puede acceder
a los datos del IGS.
6.3.2. Redes Fundamentales GPS en España
El Instituto Geográfico Nacional de España (IGN) es el encargado del
establecimiento y mantenimiento de las Redes Geodésicas y Topográficas Básicas en todo
el Territorio español, ello incluye las Redes clásicas y las GPS, tanto Nacionales como su
correspondencia con otras Redes Internacionales para la definición y conexión de modelos
en conjunto.
Con este fin, a lo largo del tiempo, se estudian y diseñan Redes Fundamentales
como las Redes de Orden Cero, que establezcan el Marco de Referencia y sirvan para
establecer los parámetros básicos y, al mismo tiempo, para su conexión, principalmente,
con Europa Occidental, es decir, con nuestro entorno más próximo. A continuación se
ofrece una breve descripción de algunas de estas redes (Capdevila, 1995).

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 96
a) Red EUREF89
Esta Red EUREF (EUropean REference Frame) fue respaldada por la IAG para
establecer un Marco de Referencia apropiado en Europa Occidental. La Red está apoyada
en los vértices VLBI y SLR de las estaciones pertenecientes al ITRF88. Concretamente, el
bloque Ibérico consta de 14 vértices en España y 2 en Portugal. El resultado del ajuste
final en coordenadas está dentro de los 5 centímetros de error medio cuadrático.
Posteriormente se realizan campañas, con apoyo en los vértices de la Red
EUREF89, para establecer una Red Geodésica de enlace ente América del Norte y Europa,
Red TANGO, con el objetivo del estudio de la Geodinámica y su integración en la Red
Mundial del Servicio Internacional Geodinámico (IGS).
También se realizan campañas para establecer la Red EUROGAUGE, que
pretende compaginar mediciones GPS con los registros mareográficos, con el objetivo de
controlar el nivel del mar en el Atlántico Norte.
b) Red IBERIA
Con la idea del control de las Redes, al objeto de la definición del ITRF, se lleva
a cabo la campaña de observaciones GPS, nombrada como IBERIA95, para densificar y
mejorar los marcos de referencia EUREF89 en España y Portugal. En este caso, la
densificación aumenta a 27 vértices en la zona Española y de 9 vértices en Portugal. Esta
Red está apoyada en las estaciones VLBI de Robledo (Madrid) y algunas estaciones
Europeas.
c) Red REGENTE
El objetivo fundamental de esta Red es la densificación de la Red EUREF89, para
dotar a los usuarios del GPS de una mayor precisión que la establecida en las Redes
Clásicas como la ROI.
Se trata de una Red Geodésica Tridimensional observada con GPS y, por tanto,
con coordenadas en los sistemas WGS84 y ED50, en la se establecen precisiones mejores
que cinco centímetros en las tres coordenadas (X,Y,Z).
Esta Red constituida por un vértice por cada hoja del MTN50 (Mapa Topográfico
Nacional a escala 1/50000), comienza en el año 1994 y tiene previsto finalizar en el año
1999. Una vez efectuada contará con 1200 estaciones ROI y NAP y se realizará una
compensación conjunta con la Red IBERIA95 para incluirla en el Sistema de Referencia
Europeo ITRF89.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 97
d) Red FIDUCIARIA
El Área de Geodesia del IGN pretende establecer una red de estaciones GPS
permanentes, que además pertenezcan a la red EUREF, al objeto de obtener coordenadas
precisas y campos de velocidad en el Sistema de Referencia Global como es el ITRF.
La importancia de estas Redes es la definición de un Marco de Referencia Global
para una concreción del ITRF, además de la determinación de las coordenadas del Polo y
variaciones en la rotación de la Tierra, estudio de la geodinámica terrestre, así como la
distribución de efemérides precisas GPS.
Este proyecto comienza en el año 1998 instalando un Datum Nacional en el
Mareógrafo del Puerto de Alicante con registros de datos continuos. A partir de ese
momento, y hasta el año 2000, se instalan 8 estaciones mas, y se espera que en un futuro
próximo, sean un total de 15 estaciones permanentes, para cubrir todo el territorio,
(Sanchez et al, 2000).
6.3.3. Proyecto RECORD: Radiodifusión Española de Correcciones Diferenciales
(IGN, 5/2000).
El proyecto RECORD forma parte del programa del Área de Geodesia del IGN,
REPONTE (Red Española para Posicionamiento y Navegación) y trata de la difusión de
correcciones diferenciales GPS a través de la subportadora no audible RDS (Radio Data
System: Sistema de Datos en Radio) de las emisoras de Radio Nacional de España (RNE).
La corrección diferencial GPS de código, obtenida a partir del observable de
seudodistancia suavizada con fase, se dispone en formato RTCM SC104. A continuación,
es analizada y comprimida en formato RASANT 2.6 (Radio Aided Satellite Navigation
Technique: Técnica de Navegación Asistida por Satélite). Es en este formato en el que se
envía a RNE quien lo incorpora a la señal FM que se emite. Un receptor
FM/RDS/RASANT descomprime y proporciona las correcciones originales RTCM SC104
integrables en los receptores GPS adecuados.
En la base del conjunto se encuentra el Sistema de Posicionamiento Global, que
aún presenta algunas limitaciones para su uso práctico, más aún en tiempo real . El usuario
puede obtener, mediante un receptor FM adecuado, las correcciones RTCM originales e
incorporarlos a su receptor GPS obteniendo así posiciones más precisas.
Las correcciones diferenciales en formato RTCM se generan y comprimen en el
IGN donde son enviadas a RNE. En RNE se integran en el servidor RDS encargado de
transmitir y mezclar las distintas tramas RDS. Desde RNE se inyectan en el satélite
Hispasat y se difunden a los centros emisores.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 98
Las distintas emisoras FM difunden las correcciones diferenciales que reciben de
Hispasat. Se transmite corrección diferencial por la cadena de emisoras Radio 2 (radio
clásica), y por algunas emisoras de Radio 1 para completar cobertura, por ejemplo, en
grandes núcleos de población.
Actualmente el sistema tiene cobertura peninsular, Islas Baleares e Islas Canarias.
Está proporcionada por más de 81 emisoras. El retardo total hasta que llega la señal al
GPS del usuario se cifra entre 3 y 5 segundos a fin de hacer posible precisiones
submétricas.
Estos receptores de FM pueden incluir en su interior un sensor GPS en cuyo caso
la salida de datos proporciona directamente posiciones corregidas susceptibles de ser
incorporadas en una aplicación específica.
Se está trabajando para dotar al sistema de una solución peninsular de tipo
WADGPS (Wide Area Differential GPS) a través de enlaces VSAT y un centro de
cálculo. Esta solución permitirá mejorar la calidad del servicio notablemente.
También se está instalando un servicio de monitorización remoto desde Prado del
Rey por parte de RNE, en él se verifica la emisión de audio y datos. El IGN por su parte
ha equipado a distintas delegaciones provinciales con equipos FM/RDS/RASANT+GPS a
efectos de una monitorización redundante (20/01/2000).
Desde Junio de 1997 se están transmitiendo correcciones diferenciales GPS en
formato RASANT a través de emisoras de FM de Radio Nacional de España (RNE).
En la figura 6.1, se muestra la constitución básica del proyecto RECORD.
Figura 6.1: Funcionamiento básico proyectado, RECORD (IGN)

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 99
6.3.4. GALILEO: El Proyecto Europeo de Posicionamiento por Satélite
Actualmente, existen en el mundo dos redes de satélites de navegación, una
americana (GPS) y la otra rusa (GLONASS). Ambas han sido concebidas para poder
localizar con gran precisión la posición de unidades, artefactos u objetivos militares. Esta
redes pueden utilizarse con fines civiles pero presentan algunas deficiencias a considerar,
tales como:
Falta de garantías y compromisos de responsabilidad por parte de sus
operadores, con implicaciones evidentes en caso, por ejemplo, de accidentes aéreos;
La fiabilidad no es total: en caso de que aparezcan errores, no se informa
inmediatamente a los usuarios, y la transmisión es a veces aleatoria, especialmente en las
ciudades y regiones situadas en latitudes extremas del norte de Europa;
Una precisión mediocre (del orden de 70 a 100 metros solamente) para las
aplicaciones que necesitan posicionamiento en plazos rápidos.
Por todas estas razones, la Unión Europea tiene intención de desarrollar, con el
proyecto GALILEO, un sistema bajo su control, que responda a sus exigencias de
precisión, fiabilidad y seguridad de aquí al año 2008.
Sin embargo esta tecnología de radionavegación por satélite, se encuentra
dominada en este momento por Estados Unidos con el sistema GPS, financiada y
controlada por militares, ha conseguido un éxito creciente, coronado cada día por nuevas
aplicaciones en los países de la Unión y en el mundo entero, su uso y mercado abarcan ya
multitud de aplicaciones en diversas actividades.
En este siglo XXI millones de ciudadanos europeos utilizan la telefonía móvil, la
televisión y las redes informáticas. Estas aplicaciones emplean ya la tecnología de
satélites.
Para la industria, las aplicaciones son todavía más importantes y diversas: por
ejemplo, para la navegación marítima y aérea, las transacciones financieras internacionales
que requieren una sincronización muy precisa, la prospección de petróleo y gas, la
agricultura y los grandes proyectos de ingeniería civil, etc.
En su Comunicación de 10 de febrero de 1999, la Comisión Europea, presentó un
programa autónomo de radionavegación por satélite denominado GALILEO, cuyo
desarrollo se propuso en 4 fases, en este orden:
1. Fase de desarrollo y validación (2001-2005), que incluye:
- Definición detallada del conjunto de los segmentos (espaciales, terrestres y
usuarios).
- Desarrollo de los satélites y los componentes terrestres.
- Validación "en órbita" del sistema.
2. Fase de despliegue (2006-2007), que incluye:

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 100
- Fabricación y lanzamiento de los satélites.
- Instalación del segmento terrestre completo.
3. Fase de explotación (a partir del 2008), que incluye:
- Renovación de los satélites, explotación de los centros y mantenimiento.
Destacando, a la vez, la necesidad de dar un impulso positivo a nuestras
industrias y servicios y la de conseguir la independencia de Europa en una tecnología tan
esencial, el Consejo solicitó a la Comisión encargada que desarrollase un sistema mundial
para usos civiles gestionado por los poderes públicos civiles y con un valor añadido
significativo con respecto a los sistemas existentes, siendo, al mismo tiempo, compatible
con ellos.
Durante la fase de definición en el 2000, la Comisión y la Agencia Espacial
Europea han movilizado a una gran parte de la industria espacial europea, así como a los
posibles suministradores de servicios, para definir las características de este proyecto y
obtener el éxito de GALILEO.
La Comisión Europea considera indispensables las siguientes condiciones:
a) La radionavegación por satélite es una tecnología clave para el desarrollo de nuestras
economías y el despliegue, con este fin, de una constelación de satélites propia de la
Unión Europea es indispensable para salvaguardar su independencia;
b) Basándose en los resultados de los estudios sobre costes/beneficios, GALILEO es
rentable y suficientemente atractivo para que, a partir de 2007, no sea ya necesaria la
financiación pública en forma de subvenciones;
c) Para la fase de desarrollo y validación (2001-2005), está programada la financiación
indispensable a partir de subvenciones públicas, sin que sea necesario recurrir a otras
aportaciones públicas con cargo al presupuesto comunitario o al de la Agencia
Espacial Europea;
d) La financiación de la fase de despliegue, que consiste en la fabricación y el
lanzamiento de satélites, así como en el establecimiento de la red de infraestructuras
terrestres, requerirá una inversión del sector privado de 1500 millones de Euros. Con
este fin se creara una asociación público/privada, para la fases de desarrollo y
validación, con un marco jurídico y financiero que sirva de apoyo al proyecto.
El objetivo de GALILEO, con el apoyo de la Agencia Espacial Europea, es lanzar
una serie de al menos 20 satélites, que se situarán en órbita a unos 20.000 kilómetros y
estarán seguidos por una red de estaciones de control en tierra, a fin de asegurar una
cobertura mundial. El sistema GALILEO permitirá a cualquier individuo, gracias a un
pequeño receptor individual barato, conocer su posición con un margen de unos metros, en
comparación con las decenas de metros que ofrece actualmente el GPS. Además, la
garantía de continuidad de emisión de la señal ofrecerá una fiabilidad total del sistema, lo
que no es posible con el GPS.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 101
El proyecto nace para crear un sistema eficaz y de alta seguridad al servicio de la
diversidad creciente de aplicaciones para los ciudadanos y las empresas, en definitiva, para
toda la comunidad.
Basado en una infraestructura espacial, GALILEO estará integrado en los
diferentes sistemas y tecnologías terrestres para dar respuesta a las necesidades de los
usuarios dondequiera que se encuentren: en las ciudades (donde las transmisiones por
satélite sin repetidores terrestres pueden quedar bloqueadas por los edificios), en las zonas
de riesgo (obras, fábricas, almacenes...), en zonas aisladas (donde el coste de la instalación
y mantenimiento de sistemas de comunicación terrestres es prohibitivo) y en la regiones
en latitudes altas (donde las señales de satélite quedan debilitadas).
GALILEO, a diferencia de los sistemas existentes, aportará la precisión necesaria
a estas aplicaciones y ofrecerá las garantías y las tomas de responsabilidad que no existen
actualmente, dentro de un esquema que incluye tres niveles de servicio:
1) Un servicio de base gratuito para aplicaciones destinadas al público en
general, especialmente en el ámbito del ocio (por ejemplo, en excursiones o en el mar),
2) Un servicio de pago, de acceso restringido para aplicaciones comerciales y
profesionales que requieren prestaciones superiores y una garantía de servicio, y
3) Un servicio restringido a muy alto nivel, también de pago, para aplicaciones
que, por razones de seguridad, no deben sufrir interrupción ni perturbación de ningún tipo.
De esta forma, Europa dispondrá de un factor de control de su porvenir, así como
de una baza importante en la competencia económica mundial. GALILEO permitirá a
Europa y a sus socios desarrollar nuevas normas que se impondrán por el avance técnico
que representan y que darán a las industrias europeas participantes una ventaja comercial
considerable sobre sus competidores.
La Unión Europea considera crucial la cooperación con socios internacionales
para proyectos de esta naturaleza, por tanto se diseña como un proyecto abierto a la
cooperación internacional. Evidentemente, se trata de cooperar con los dos países ya
equipados de sistemas de satélite, pues en el mundo complejo e interdependiente de hoy
en día, el hecho de ser competidores no impide la concertación sobre temas de interés
común. Con los Estados Unidos, Europa está estudiando ya un cierto número de
cuestiones técnicas de compatibilidad y se propone establecer un mecanismo de
cooperación sólido.
Además de estos países, Europa está dispuesta a implicar en la investigación, el
desarrollo y la puesta en servicio industrial del proyecto GALILEO a todos los países que
quieran unírsele para crear el sistema eficaz, fiable y seguro que el mundo necesita.
Asimismo, una intensa colaboración entre la Unión Europea y los países terceros
interesados ofrece un potencial considerable de oportunidades a nivel industrial. Tanto si

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 102
la cooperación da lugar a asociaciones propiamente dichas como si no, todos podrán
beneficiarse de las ventajas que aporta GALILEO.
En el proyecto intervienen cada uno de los países interesados de la Comunidad
Europea, concretamente en España es el IGN el encargado de participar, y así lo esta
haciendo, en todas las actividades de puesta en marcha del sistema.
Fuente: Diario Oficial de las Comunidades Europeas, 3.8.99.
6.3.5. Sistema GLONASS
La antigua Unión Soviética ha desarrollado a principio de los ochenta un sistema
de posicionamiento y navegación por satélites llamado GLONASS (GLobal Orbiting
NAvigation Satellite System) muy similar al GPS americano.
Este sistema GLONASS está constituido por tres sectores fundamentales:
espacial, control y usuario.
El Sector de Control controla los satélites y genera los parámetros contenidos en
los mensajes de navegación transmitidos. Los Centros principales más importantes se
encuentran en Moscú y están compuestos por el Centro de Control de Tierra, el Centro
Sincronizador y el Centro de Control de Fase. Otras estaciones de seguimiento y
comunicación se hayan distribuidas a lo largo de la geografía de la antigua Unión
Soviética, como son: St. Petesburg, Ternopol, Jenissejsk, Komsomol´ sk-na-Amure,
Baklash, Jevpatoria y Kitala.
Las principales funciones del Sector de Control son la determinación de los
elementos orbitales de los Satélites, el mantenimiento de la escala de tiempo del sistema y
el cálculo de los parámetros de frecuencia de los satélites. Esta información se usa
principalmente para la generación de los mensajes de navegación (es decir el almanaque,
las efemérides, los estados de los relojes y la salud de las señales) transmitidos por los
satélites.
Este sector de control también mantiene el Sistema de Tiempo de Referencia en
GLONASS sincronizado con UTC (Tiempo Universal Coordinado) de Moscú o UTCsu
(igual al Tiempo Universal Coordinado más tres horas). Los parámetros contenidos en el
mensaje de navegación permiten que los relojes de los receptores puedan sinconizarse con
UTC Moscú con una precisión de 1s.
El Sistema de Referencia Geodésico usado en GLONASS es el SGS90 (Soviet
Geodetic System 1990). Dicho sistema tiene como origen el centro de masa de la Tierra y
está fijo a ésta. El eje Z es el paralelo a la dirección del eje de rotación medio de la Tierra,
el plano XY es paralelo al plano del ecuador y el XZ al meridiano de Greenwich.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 103
Una vez completado, el Sector Espacial de GLONASS estará compuesto por 24
satélites distribuidos en tres planos orbitales, es decir, con ocho satélites en cada plano.
Todos los planos tienen una misma inclinación de 64,8º sobre el ecuador y cada uno
contiene ocho satélites en órbitas circulares. La altitud es aproximadamente 19100 Km, lo
que hace que el periodo orbital tenga una duración 8/17 de un día sidéreo.
Aunque las frecuencias de emisión sean también dos L1 y L2, dentro de la banda
L, la diferencia con el GPS es que los satélites transmiten las señales en diferentes
frecuencias con un solo código PRN común a todos. La frecuencia base para L1 es de
1602 MHz. El resto de las frecuencias es función del número de satélite (n) multiplicado
por la frecuencia de apoyo (Fa) de 562,5 KHz más la frecuencia fundamental (Fo), es
decir: Fn = Fo + Fa * n. Para L2, la frecuencia base es de 1246 MHz y la frecuencia de
apoyo de 437,5 KHz, con la misma formulación para el cálculo. Sobre estas dos
portadoras (L1 y L2), también, se modulan el mensaje de 50 Hz y un código P de 5,11
MHz, y sobre la L1 se modula además un código C/A de 0,511 MHz.
Una de las principales ventajas del GLONASS es que no tiene ningún tipo de
degradación de las señales, lo que lo hace atractivo sobre todo para su utilización conjunta
con el sistema americano GPS, y de hecho, ya existen soluciones de equipos combinados
con resultados efectivos, sobre todo si tenemos en cuenta que es posible, con esta
solución, utilizar receptores de una sola frecuencia para eliminar incertidumbres, la
desventaja es la desconfianza actual por la que pasa el antiguo Bloque Soviético en estos
momentos.
6.3.6. Establecimiento de Control Vertical
Tal como ya se citó, el GPS se está utilizando para las más variadas actividades
de posicionamiento. Sin embargo, las actividades relacionadas con la nivelación de
precisión aún necesitan soluciones más eficaces. El GPS proporciona altitudes puramente
geométricas, mientras que la mayoría de las actividades prácticas lo que interesa son las
altitudes relacionadas con el campo gravitacional, o sea, las altitudes ortométricas, las
cuales tienen conexión con la realidad física. Para determinar altitudes ortométricas (H), a
partir de las geométricas (h), determinadas con el GPS, es indispensable el conocimiento
de la ondulación del geoide (N). De una forma simplificada, pero con muy buena
aproximación, se puede escribir:
H h N (6.1)
Estos valores son adecuados para una serie de aplicaciones. Sin embargo, la
determinación de altitudes ortométricas vía GPS, para sustituir a la nivelación geométrica

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 104
de precisión, es un objetivo a largo plazo. Hasta que esto suceda, deben aplicarse
soluciones locales y técnicas aproximadas, como por ejemplo, la interpolación a partir de
estaciones observadas utilizando GPS y con altitudes ortométricas conocidas.
Con tales valores disponibles (h-H), se puede intentar modelar el geoide dentro
de una región, usando alguna superficie, como por ejemplo (Lachapelle, 1992 ):
z aE bN c
z aE bN cNE d
(a)
(b) (6.2)
donde z es la ondulación del geoide en las regiones consideradas (h-H), E y N son las
coordenadas horizontales (X e Y) de la superficie y a, b, c y d son parámetros a calcular.
Usando los parámetros calculados, se determinan las ondulaciones del geoide en las demás
estaciones, posibilitando la obtención de las correspondientes altitudes ortométricas. Es
importante resaltar que las estaciones utilizadas para calcular los parámetros de la
superficie deben ser cuidadosamente seleccionadas; Las mismas deben, siempre que sea
posible, estar localizadas en los extremos de la región de estudio, en posiciones adecuadas
a la determinación de la superficie en cuestión. Por ejemplo, en la determinación de una
superficie plana, los puntos no deben ser colineales.
Actualmente están disponibles diversos modelos geoidales en diferentes
territorios. En España se ha efectuado la determinación del geoide gravimétrico completo
de la Península Ibérica y su entorno, en el que se han utilizado más de 11000
observaciones de anomalías que se han transformado al sistema de referencia GRS80. El
modelo Geoide Ibérico 95 (IBERGEO) se ha desarrollado en el Instituto de Astronomía y
Geodesia (UCM-CSIC), rectificado con las observaciones de las Redes Regente e Iberia
95. Con este modelo, que dispone de un vértice por cada hoja del MTN 1/50000, se ha
representado en un mapa con curvas equidistantes cada metro con el que se pueden
obtener resultados excelentes (Sevilla, 1997).
También se pueden citar otros modelos, como el GEM-T3 (Goddard Earth Model
- T3), y el mapa geoidal MGB-92 (IBGE/EPUSP) con precisión absoluta y relativa del
orden de 1 cm/km. respectivamente. En Canadá y Estados Unidos, el nivel de precisión
absoluta del geoide es del orden de 10 cm y la relativa varía de 4 a 0.1 ppm (partes por
millón) para distancias de hasta 1000 Km. (Sideris y She, 1994).

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 105
7. GLOSARIO DE TÉRMINOS Y ACRÓNIMOS
RELACIONADOS CON GPS
Este Glosario de términos y acrónimos relacionados con GPS contiene palabras y
referencias equivalentes en español e inglés. Cuando el significado es el mismo, la
explicación también se adjunta la expresión en español.
Ajuste: Procedimiento por el cual se someten las observaciones de una figura
geodésica a compensar.
Almanaque: Es un conjunto de parámetros incluidos en el mensaje de navegación
de cada satélite que el receptor utiliza para predecir la posición aproximada de todos
ellos, a una hora determinada, en cualquier punto de la Tierra.
Altura del geoide: Ondulación del geoide
Altura Elipsoidal: Medida de la distancia de un punto terrestre a la superficie de un
elipsoide referencia.
Altura ortométrica: Medida de la distancia de un punto al geoide según la línea de
la plomada.
Ambiguity = Ambigüedad: El número arbitrario de ciclos de una observación de
fase al comienzo de ésta. La fase de la onda que ingresa es comparada con la fase de
una señal de referencia generada dentro del receptor. La diferencia de fase observada
corresponde a la porción residual de onda completa. El número total, N, de ondas
completas entre observador y satélite es, al principio, incógnita. Esta ambigüedad se
mantiene tanto como el receptor invierta en determinarla mediante una técnica
adecuada.
Antena: Es el componente de un sistema GPS que, centrado sobre el punto, colecta
las señales provenientes de los satélites y las envía al receptor para el procesamiento.
Pueden estar incorporadas o no al cuerpo del mismo y existen diferentes tipos, desde
modelos más simples corno el "microstrip" hasta complejos "choke rings" que
mitigan los efectos del multicamino o multipath.
AS o Anti-Spoofing; Anti-engaño: Es un tratamiento aplicado a la señal cuya
finalidad es que los receptores no caigan en la trampa de tomar como auténticas
señales falsas emitidas por el “supuesto enemigo”. Para ese fin se procede a encriptar
el código P a través de un nuevo código secreto, W, generando en total un llamado
"código Y", protegido, al cual pueden acceder sobre ambas portadoras sólo los
usuarios autorizados a través de una clave otorgada por el DoD.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 106
ASCH: American Standard Codefir Information Interchange: conjunto de
caracteres (letras, números y símbolos) usados para mostrar y transferir datos
digitales en formato estándar.
Banda L: Grupo de frecuencias de radio comprendidas entre 390MHz y 1550MHz
entre las que se incluyen las frecuencias GPS.
Bearing = Rumbo: Orientación fija a tomar durante una travesía para dirigirse de
un punto a otro. Usualmente se la mide en el sentido de las agujas del reloj a partir del
norte.
Bias = Error sistemático
Block I, II, IIR, IIF: Son distintas generaciones de satélites GPS según reemplazos
progresivos. Los últimos corresponden a una clase que operará en el futuro.
Blunder = Error grosero.
C/A code = Coarse/Acquisition code = Código C/A.
Canal : Es el circuito de un receptor GPS necesario para recibir la señal de un
único satélite.
Carrier = Portadora: Una onda de radio cuya frecuencia, amplitud o fase puede ser
variada por modulación.
Carrier frecuency: Frecuencia de una señal no modulada que emite un radio
transmisor.
Carrier phase GPS = Mediciones GPS de fase: Mediciones GPS basadas en las
señales portadoras LI y L2.
Centro de fase: El centro de fase de una antena es el lugar físico de ésta donde las
señales crudas GPS son observadas y, en consecuencia, el punto cuya posición será
determinada. Por eso, para lograr las coordenadas de una marca del terreno, deben
encontrarse ambos sobre la misma vertical (antena centrada) y medirse la distancia
entre ambos a fin de incorporar este dato al procesamiento.
CEP = Circular Error Probable = Error Probable Circular.
Chip: El intervalo de tiempo requerido para la transmisión de cada 0 ó 1 en la
secuencia pseudo-aleatoria. (Se usa también para designar un circuito integrado) .
Ciclo flotante o ciclo perdido: Discontinuidad en la medición de fase resultante de
la pérdida de conexión durante el seguimiento de un satélite.
CIO = Conventional International Origin.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 107
Clock bias = Sesgo del reloj: Diferencia entre el tiempo indicado por el reloj y el
tiempo GPS.
Clock offset = error del reloj : Diferencia constante entre las lecturas de tiempo de
dos relojes.
Código C/A: Modulado sobre la señal GPS L l. Se trata de una secuencia de 1023
bits generados con una frecuencia de 1,023MHz (millones de bits por segundo), por
lo que se repite íntegramente cada milisegundo. En otras palabras, es una serie
ordenada de dígitos binarios (0 y 1) modulada sobre la señal según un patrón propio
de cada satélite. Esto se traduce en un ruido electrónico con apariencia aleatoria, por
eso se lo llama Pseudo Random Noise o PRN. Cada satélite tiene el suyo y se usa
para identificarlo, del SV1 al SV36. Su función es permitir determinar el tiempo
invertido por la señal en recorrer la distancia entre el satélite y el receptor: espacio o
distancia = velocidad * tiempo.
Código P: Código preciso o protegido de la señal GPS, usado normalmente por los
receptores militares o usuarios autorizados por el DoD. Difundida en 10,23Mhz, se
trata de una secuencia binaria muy larga (1014 bits) modulada sobre una portadora
GPS, la cual se repite cada 267 días. Semanalmente se le adjudica a cada satélite una
porción o segmento único del mismo modificándose los sábados a medianoche.
Confidence Level = Nivel de confianza.
Constellation = Constelación:
• Conjunto de satélites GPS en órbita. Comprende 27 satélites NAVSTAR
operacionales que giran en torno a la Tierra distribuidos en seis planos orbitales
equidistantes, inclinados 55º con respecto al ecuador, describiendo órbitas casi circulares
(excentricidad 0,01) a una altitud media de 20200km, con un período de 12 horas sidéreas.
Esta última particularidad hace que para un lugar dado la configuración satelital se repita y
que cada día la misma se adelante cuatro minutos con respecto al tiempo universal o el
local.
• Un grupo específico de satélites usados para calcular la posición de un punto.
Número mínimo: tres satélites para una determinación 2D, cuatro para 3D.
Control Segment = Segmento de Control.
Coordenadas cartesianas o rectangulares tridimensionales: Números reales X, Y,
Z, representativos de la posición de un punto P de la Tierra en relación a tres ejes
mutuamente perpendiculares que se intersecan en un punto común u origen. También
se las reconoce como las componentes rectangulares del vector que identifica a un
punto P.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 108
Coordenadas geodésicas: Un sistema de coordenadas donde la posición de un
punto es definida usando los elementos latitud, longitud y altura elipsoidal.
Coordenadas fijas: Coordenadas de un punto que no están sujetas a ajustes.
Corrección ionosférica = Retardo ionosférico.
Corrección troposférica = Retardo troposférico.
CTS = Sistema terrestre convencional: Acrónimo de Conventional Terrestrial
System, es un sistema conformado por un conjunto de coordenadas cartesianas de
estaciones fundamentales dentro de una red global.
Cycle slip = Ciclo faltante o ciclo perdido.
Data file = Archivo de datos.
Datos crudos: Datos GPS que no han sido procesados o corregidos
diferencialmente.
Datum geodésico: Modelo matemático elegido como el mejor ajuste para una parte
o el total del geoide. Está definido por un elipsoide de dimensiones y orientación
definidas relacionado con un punto de la superficie topográfica elegido como origen
del mismo. Por su aplicación puede ser regional, nacional, continental o global.
Datum global: Un datum geodésico mundial está definido por el tamaño, forma y
orientación de un elipsoide y la ubicación del centro de éste con respecto al centro de
la Tierra.
Differencial Positioning = Posicionamiento diferencial.
Disponibilidad Selectiva (SA) = Selective Availability: A fin de inducir
imprecisión en las posiciones GPS el DOD ha introducido la SA, la cual consiste en
un proceso de manipulación intencional de la señal del satélite, cuyos principales
mecanismos son: la desestabilización sistemática del reloj y/o un error inyectado en
sus datos o efemérides. En la actualidad ha sido anulada el 2 de mayo de 2000. Sus
efectos causan una importante indeterminación en las medidas, aún así, las técnicas
GPS diferenciales reducen sus efectos.
DMA = Defense Mapping Ageney: En la actualidad "National Imagery and
Mapping Agency" (NIMA), es la Agencia Nacional de Mapeo e lmágenes de los
Estados Unidos.
DoD: Departamento de Defensa de los Estados Unidos.
DOP = Dilution of Precision = Dilución de la Precisión: Los DOP son números
adimensionales que cuantifican la contribución de la disposición geométrica relativa

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 109
de los satélites a la incertidumbre de una posición fija. Es decir, un DOP es una
descripción del efecto de la geometría de los satélites que intervienen en la medición
sobre el cálculo de las coordenadas del punto y el tiempo. Se representa por un
escalar que multiplica al error medio cuadrático de la medida en sí, por lo tanto, a
mayor DOP mayor inexactitud en el valor calculado. Los menores DOP están
asociados a satélites separados y bien distribuidos sobre la esfera celeste.
Doppler shift: Aparente cambio de frecuencia de una onda causado por el
movimiento relativo transmisor- receptor.
Double difference = Doble diferencia: Observable GPS formado por diferencias de
fases, o pseudodistancias, medidas por un par de receptores (i, j) que rastrean el
mismo par de satélites (S1, S2). Las dobles diferencias se usan esencialmente para
eliminar todos los errores de reloj.
2D: Posicionarniento horizontal de un punto.
ECEF = Earth Centered Earth-Fixed: Sistema tridimensional de coordenadas
cartesianas fijadas a la Tierra de modo tal que el origen coincide con el baricentro
terrestre, el eje X en la intersección del primer meridiano con el ecuador , Y en la
longitud 90º y Z paralelo al eje de rotación terrestre. La versión corriente de este
sistema es el llamado WGS84.
Efemérides: Conjunto de parámetros numéricos que describen las posiciones
precisas de los satélites en función del tiempo. Las mismas pueden ser transmitidas o
precisas.
• Efemérides trasmitidas (Broadcast Ephemeris): cada satélite transmite su propia
efemérides extrapolada, la que repite cada 30 segundos.
• Efemérides precisas: se calculan en base a observaciones realizadas por redes de
rastreo de los satélites GPS y está disponibles unos días después de la toma de datos.
Elementos Keplerianos: Seis parámetros que describen teóricamente la posición y
velocidad de un satélite sobre una órbita elíptica pura.
Elevación de un punto: Altura sobre el nivel del mar.
Elipse de error: Es una figura cuyos parámetros señalan aspectos de la precisión de
la posición de un punto después de haberse realizado un ajuste por mínimos
cuadrados. Su semieje mayor significa en módulo y orientación el máximo error
estándar y el semieje menor, el mínimo, en tanto que la superficie de dicha elipse
representa un porcentaje cercano al 37% de probabilidad de ubicación del punto. Para
alcanzar la imagen del 95% de probabilidad deben multiplicarse los semiejes por 2,5.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 110
Elipsoide: Superficie matemática cuyas secciones planas son elipses, la cual es
usada para representar la Tierra. En Geodesia se aplica el "elipsoide de revolución
aplastado", figura tridimensional generada por una elipse que rota alrededor de su eje
menor. Se define por dos cantidades, semieje mayor ( a ) y aplastamiento: f =
(a-b) / a.
Elipsoide de error: Concepto análogo al de elipse de error aplicado a 3D.
EGM = Earth Gravitational Model: Modelo gravitatorio terrestre
EMC: RMS = Error Medio Cuadrático: Definido matemáticamente como la raíz
cuadrada del cociente entre la suma de los cuadrados de los errores aleatorios y el
número de errores menos uno, se minimiza con una solución por el método de los
mínimos cuadrados. Él da una medida estadística de la dispersión de las posiciones
calculadas en torno a la "posición mejor ajustada". A menor EMC mayor precisión.
Error Probable Circular = CEP: Una medida estadística de la precisión horizontal.
El CEP es el valor que define un círculo de un radio tal que encierra el 50% de los
puntos datos.
Error Probable Esférico = SEP: Una medida estadística de la precisión 3D. El SEP
es el valor que define el radio de una esfera que contiene la mitad de los puntos datos.
Errores aleatorios o accidentales: Errores que no obedecen a un ley matemática o
física conocida y tienden a distribuirse en torno a la media simétricamente, con
frecuencia creciente en la medida que diminuye su magnitud.
Errores groseros: Errores o equivocaciones que resultan del mal funcionamiento
del equipo, condiciones de observación adversas o de una equivocación o distracción
del operador. Son fáciles de reconocer y deben excluírselos de cualquier
procesamiento posterior.
Errores sistemáticos: Errores que siguen una ley determinada que sesga las
observaciones porque actúan siempre en mismo sentido. Deben eliminarse
determinando su influencia para corregirlos o por una técnica adecuada de medición.
Error o desvió estándar (sigma): Concepto equivalente al de EMC.
Error relativo: Número que caracteriza la relación entre el error y la magnitud
medida. Corrientemente se la expresa en ppm o como 1/x.
Estación base: En posicionamiento GPS diferencial una estación base es aquélla
que siendo extremo de un vector se asume como de coordenadas conocidas. También
se la suele llamar "estación de referencia".

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 111
Exactitud: El grado de acuerdo entre la estimación o la medida de una posición y el
valor de la misma considerado como "verdadero". No se lo utiliza como sinónimo de
precisión, contrariamente a lo que dice el diccionario.
Factor de escala: Multiplicador utilizado principalmente en los sistemas de
proyección conformes para convertir distancias del elipsoide en distancias sobre el
plano y viceversa. También se hace uso de un factor de escala cuando se refiere un
punto expresado en un sistema a otro datum geodésico diferente, problema conocido
como transformación de datum.
File = archivo: Colección homogénea de datos almacenada en un dispositivo
informático, receptor, computadora, disquete, etc., bajo un nombre específico. Según
la estructura de su presentación se reconocen diferentes formatos.
Filtro Kalman: Es una técnica o procedimiento de predicción, iterativo, usado para
estimar los parámetros correctos del modelo de un proceso. En otras palabras, un
algoritmo para optimizar sistemas que varían en el tiempo, por ej. Coordenadas; así se
pueden predecir las correcciones a las efemérides.
Firmware: Dispositivo electrónico básico de un receptor GPS donde están
codificadas las instrucciones relativas a las funciones del mismo e insertados los
algoritmos de procesamiento de datos como partes integrales del circuito interno.
Frame/Framework = Marco de referencia
GAUSS KRÜGER: Caso especial del sistema de coordenadas planas Mercator
Transversa, por el cual se representa el elipsoide sobre un cilindro tangente al mismo
a lo largo de un meridiano cuya imagen en el plano no tiene alteraciones pues el
correspondiente factor de escala k = 1.
GDOP: Medida de la calidad geométrica de una constelación para las soluciones
conjuntas de posición y tiempo.
Geodesia: Disciplina que se ocupa de la determinación de la figura y dimensiones
de la Tierra, del campo gravitatorio terrestre y las variaciones temporales de los
mismos.
Geoide: Es una superficie particular equipotencial del campo gravitatorio terrestre
(perpendicular a la dirección de la gravedad en todos sus puntos), ondulante y
suavizada, que coincide con el nivel medio del mar imaginado extendido a través de
los continentes. Muchos receptores GPS, así como los softwares tienen incorporado
un modelo de geoide para poder corregir las posiciones determinadas por la
separación geoide-elipsoide.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 112
GLONASS (Global Navigation Satellite System): Globainaya Navigatsionnaya
Sputnikovaya Sistema: sistema ruso de navegación por satélites de diseño muy
similar al GPS.
GMT: Hora de Greenwich, Tiempo Medio en Greenwich.
GPS o Sistema de Posicionamiento Global: Creado, administrado y operado por el
Departamento de Defensa de los Estados Unidos. Es un sistema de navegación pasivo
(o de una vía) que permite determinar con alto grado de exactitud la posición de
puntos en tierra, mar y aire. Consiste básicamente de tres partes: un segmento
espacial (la constelación de satélites NAVSTAR), un segmento de control (estaciones
terrestres de rastreo) y el segmento del usuario (hardware, software y accesorios).
GRS80: Sistema de Referencia Geodésica adoptado por la Asamblea General de
Asociación Internacional de Geodesia (IAG) del año 1979. Sus principales
parámetros son: a = 6378137m; 1 / f = 298.257222101.
HDOP: Es el DOP referido a mediciones horizontales (latitud, longitud). (Ver
PDOP).
Heading: En navegación, la dirección corriente en la que uno se está moviendo.
Hertz: Unidad de frecuencia igual a un ciclo por segundo. La señal GPS tiene una
frecuencia fundamental de 10,23 MHz (10,23 Megahertz = 10.230.000 Hz)
IERS = International Earth Rotation Service: El Servicio Interncional de Rotación
de la Tierra , establecido conjuntamente por la International Astronomical Union
(IAU) y la International Union of Geodesy and Geophysics (IUGG) en 1988, tiene
por misión proveer al mundo científico y a la comunidad técnica valores de referencia
para los parámetros de orientación de la Tierra (EOP) que surgen al considerar el
movirniento del polo y las variaciones de la velocidad de rotación de la Tierra. Para
ello contribuyen técnicas espaciales geodésicas entre las que se incluye el GPS.
IGS = International GPS Geodynamies Service: Auspiciado por la Asociación
Internacional de Geodesia y basado en un conjunto de más de 200 estaciones de
rastreo GPS distribuidas por todo el planeta, tiene por misión proveer productos GPS
de alta calidad tales como efemérides precisas, parámetros de rotación de la Tierra,
coordenadas y velocidades de las estaciones de rastreo e información de reloj de los
satélites. Por otra parte, se ocupa de monitorear las deformaciones de la Tierra sólida,
tectónica de placas, el nivel del mar y el estado de la atmósfera.
Intervalo de registro = Logging interval = Recording interval: Es el intervalo de
tiempo entre registros sucesivos de datos GPS crudos en la memoria del receptor

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 113
GPS. Por ej. un intervalo de registro de 10 segundos indica que los datos crudos se
guardan en memoria cada 10 segundos.
Ionosfera: Zona de la atmósfera ubicada aproximadamente entre los 60km y los
1000km de altura, caracterizada por la presencia de partículas cargadas
eléctricamente que la convierten en un medio no homogéneo y dispersivo para las
señales de radio.
Ionospherie Delay = Retardo ionosférico.
ITRF = IERS Terrestrial Reference Frame: Marco de referencia terrestre
internacional definido, materializado y mantenido por el IERS. Sus coordenadas están
relacionadas a un sistema con origen en el centro de masa de la Tierra (incluidos los
océanos y la atmósfera) y orientación de sus ejes consistentes con las resoluciones
emanadas de la Unión Internacional de Geodesia y Geofísica ( IUGG) y la Unión
Astronómica Internacional (IAU). El elipsoide de referencia es el mismo que el del
WGS84. Corrientemente es acompañado por un número que señala el año al cual
corresponden las coordenadas, por ej. ITRF96.
Latitud geodésica: Ángulo entre la normal a la superficie del elipsoide que pasa
por el punto de interés y el plano del ecuador. Se la mide entre 0º y 90º hacia el Norte
(+) y el Sur (-) de este último.
Longitud geodésica: Angulo entre los planos del primer meridiano o meridiano 0 y
del meridiano geodésico del punto en cuestión. Usualmente se utilizan los valores de
entre 0º y 180º al Este (+) y al Oeste (-) de aquél.
Línea de base o Baselínea: Longitud del vector tridimensional entre un par de
estaciones donde se han colectado datos simultáneamente y procesado con técnicas
diferenciales.
Log: Palabra inglesa usada para indicar la acción de almacenar datos en un
receptor o en una computadora.
Loop iniciosures = errores de cierre.
L1 y L2: Señales radiadas por cada satélite de la constelación GPS. L1 a
1575,42Mhz está modulada con los códigos C/A y P, a los que se le suma el mensaje
de navegación. L2 en 1227,60MHz, sólo porta el código P y el mensaje de
navegación.
Marco de referencia: Materialización de un sistema de referencia a través de un
conjunto de estaciones de control fijas, establecidas sobre la superficie terrestre por
sus respectivas coordenadas y correspondientes variaciones en el tiempo.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 114
Máscara de elevación = Ángulo de corte: La menor elevación, en grados, a la cual
se le permite al receptor rastrear un satélite. Medida a partir del horizonte del lugar de
observación, corrientemente se fija en 15º para evitar problemas de interferencia
causados por edificios, árboles y errores de multipath.
Máscara de DOP: El valor más alto de PDOP hasta el cual el receptor computará
posiciones.
Máscara SNR: La mínima relación señal-ruido a la cual el receptor usará un
satélite para determinar posición.
Medición cinemática: Una forma de medición de fase continua que requiere sólo
períodos muy cortos de recopilación de datos en cada punto a posicionar. Las
restricciones operacionales incluyen comenzar a partir de una línea de base,
rastreando cuatro satélites como mínimo y mantener la conexión con éstos. Uno de
los receptores se coloca estático en un punto de control en tanto otro, u otros, se
desplaza de punto a punto. Este método requiere atención y cuidado para evitar
situaciones de pérdida de la señal.
Medición estática: Método de medición caracterizado por la ocupación simultánea
de dos o más puntos durante un período suficientemente prolongado de tiempo
mientras los receptores se mantienen estacionarios en tanto registran los datos. Es la
técnica de mayor precisión.
Mediciones de código: Mediciones GPS basadas en el código C/A.
Mensaje de navegación: Es el paquete de información modulada sobre ambas
frecuencias portadoras el cual incluye, entre otros datos, las efemérides del satélite en
cuestión, los parámetros de corrección del reloj del mismo e información sobre su
estado de "salud". Se trasmite a 50 bits por segundo y su estructura es tal que el total
de la información está disponible después de 12,5 minutos.
Método de los Mínimos Cuadrados = MCM: Método de cálculo muy poderoso
ideado por Gauss que consiste en imponer la condición de mínimo a la suma de los
cuadrados de los errores de una medición sin sesgo. En el caso del ajuste de una red el
MCM realiza tres tareas básicas: l) desplaza los vectores para que estén conectados en
una red de polígonos contiguos, 2) agrega pequeñas correcciones a las componentes
de cada vector para obtener una figura plana cerrada y 3) calcula las coordenadas y
alturas de todos los puntos.
MSL = mean sea level = nivel medio del mar.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 115
Multicanal: Tipo de receptor continuo, de canales paralelos, dispone de 4, 6, 8
hasta 12 canales, a cada uno de los cuales se le asigna un satélite en particular. Así se
miden los retardos en forma simultánea resultando más rápidos y precisos.
Multipath = Multicamino = Multitrayectoria: Es un fenómeno de interferencia
causado por señales GPS reflejadas en estructuras o superficies reflectoras las cuales,
habiendo recorrido mayor distancia que la correcta, inducen errores de posición.
Multiplexador: Es una clase de receptor que utiliza uno o pocos canales para el
seguimiento rápido de varios satélites en tiempo compartido.
Nanosegundo: Fracción de tiempo igual a una milmillonésima de segundo (10-9
segundos) .
NAD-83: Datum nortearnericano 1983.
NAVSTAR: Acrónimo de Navigation System with Timing and Ranging, es el
nombre de los satélites del sistema GPS.
Nivel de confianza: La estimación estadística de un error tiene un nivel de
confianza asociado con él que indica la probabilidad de que el valor verdadero
(desconocido) se encuentre dentro de un rango generado al restar y sumar el error
estimado al valor medido. Por ejemplo si una medida de 100,00m tiene un error
estándar de 0,01m se puede asegurar con un nivel de confianza del 68% que el valor
correcto se encuentra entre 99,99 y 100,01. Igualmente, con un nivel de confianza del
95 %, que el mismo es mayor o igual que 99,98 y menor o igual que 100,02.
Observable: En medición GPS es el nombre general dado a los datos crudos que
están siendo colectados por el receptor. En general reciben este nombre todas las
magnitudes susceptibles de ser observadas o medidas.
Observación: El acto de ocupar un sitio y grabar un archivo de datos GPS.
Ondulación del geoide = separación geoide-elipsoide: Diferencia entre la altura
elipsóidica y la altura ortométrica de un punto de la superficie terrestre. Suele también
usarse la denominación altura del geoide.
Origen Internacional Convencional (CIO): Posición promedio del eje de rotación
terrestre durante los años 1900 a 1905.
OTF = On the fly: Técnica de tiempo real que resuelve las ambigüedades de fase
sin requerir que el receptor GPS permanezca estacionario.
Outage: Breve período de tiempo durante el cual el GPS no puede ser usado para
computar una posición.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 116
PDOP: Es el DOP referido a la posición 3D de un punto (latitud, longitud y altura).
El mismo está relacionado con los DOP horizontal y vertical a través de: PDOP² =
HDOP² + VDOP².
Posicionamiento autónomo: Recibe este nombre el posicionamiento que se realiza
con un único receptor, sin ningún tipo de procesamiento diferencial. Es la técnica de
menor grado de exactitud y se la conoce también como posicionamiento simple.
Posicionamiento diferencial: Procedimiento en el que se corrigen los datos GPS
colectados en un punto de coordenadas incógnitas con datos colectados
simultáneamente en una estación base ubicada en la misma área de trabajo. Existen
dos maneras de aplicarlo: en tiempo real y en postproceso.
Posicionamiento relativo: Técnica diferencia para determinar la diferencia de
coordenadas entre dos marcas del terreno. Se coloca una antena sobre cada una de los
puntos y se observan simultáneamente los mismos satélites.
Postproceso: Procedimiento de corrección y cálculo de las coordenadas de los
puntos posterior a la medición.
ppm = partes por millón (milímetros por kilómetro): Expresión del error relativo
usado frecuentemente para referirse al error en la determinación de distancias.
PPS = Precise Positioning Service: Es el más alto nivel de servicio ofrecido por el
sistema GPS, con acceso a ambas frecuencias, código P y eliminación de la
disponibilidad selectiva. Es prácticamente de uso militar exclusivo o para usuarios
autorizados por el DoD.
Pseudorange = Pseudistancia: Una distancia medida entre el satélite y el receptor
que no ha sido corregida de los errores de sincronización entre los relojes de arribos.
PRN = Pseudo Random Noise (Ver Código C/A).
Raw data = Datos crudos.
Recording interval = Intervalo de registro.
Receptor GPS: El Receptor GPS es el conjunto de piezas del hardware cuya misión
es captar las señales emitidas por los satélites. Según el destino y fabricante, cada
equipo de éstos puede presentar diferencias notables con respecto a otros de igual
designación, pero genéricamente todos poseen las mismas componentes básicas, total
o parcialmente integradas a él. Basados en el tipo de observables y en la
disponibilidad de los códigos pueden clasificarse en: 1) Pseudorange con código C/A,
2) Fase y código C/A, y 3) Fase y código P.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 117
RTK = Real Time Kinematic = Tiempo Real Cinemático: Procedimiento GPS
cinemático diferencial por el cual las correcciones de fase son transmitidas desde una
estación de referencia a un receptor móvil, tan rápido como son colectadas. Requiere
radio-enlaces entre base y rover.
Relojes atómicos: Son relojes de altísima precisión, osciladores, basados en el
comportamiento de elementos tales como cesio, hidrógeno y rubidio. Los satélites
GPS llevan a bordo relojes atómicos que les permiten mantener una escala de tiempo
prácticamente perfecta.
Remote o Rover = Remoto: Es el receptor GPS que se mueve de un punto a
posicionar a otro durante un posicionamiento relativo, o a lo largo de una trayectoria
si se aplica técnica cinemática.
Retardo ionosférico: Demora que experimenta una señal GPS al atravesar la
ionosfera. El retardo de fase depende de la densidad de electrones en dicha zona y
afecta las portadoras.
Retardo troposférico: Es el error que introduce el paso de la señal por la troposfera.
Dicha zona es un medio no dispersivo para las ondas de radio, por lo tanto sus efectos
refractivos son independientes de la frecuencia y depende solo de los parámetros
meteorológicos y de la longitud del recorrido a través de aquélla.
RINEX: Acrónimo de Receiver Independent Exchange Format es un conjunto de
formatos y definiciones para tiempo, fase y distancia que permite intercambiar y
procesar datos provenientes de receptores GPS de diferentes características, marcas y
modelos.
Satélite GPS o NAvSTAR: Vehículo espacial de la familia GPS.
Satellite message = Mensaje del satélite
Segmento de control: Una red mundial de estaciones GPS que se ocupan del
monitoreo y control de los satélites para asegurar la exactitud de sus posiciones y
buen funcionamiento de sus relojes.
Segmento del usuario: El conjunto de elementos constituido por todos los equipos,
software y tecnología utilizados para la recepción de las señales provenientes de los
satélites que permiten el posicionamiento y la determinación del tiempo
Segmento espacial: Parte del Sistema GPS localizada en el espacio, es decir, los
satélites y sus componentes. Su propietario y administrador es el DoD.
Semana GPS: Número de semanas enteras desde que el Tiempo GPS fue cero,
medianoche del sábado al domingo del 6 de enero de 1980. Se mide según módulo

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 118
1024 por lo que la cuenta se recicló el 22 de agosto de 1999, volviendo la cuenta de
las mismas a cero.
Señal GPS: Todos los satélites GPS transmiten una señal electromagnética
estructurada sobre la frecuencia fundamental de 10,23MHz, originada en relojes
atómicos, osciladores, muy estables instalados a bordo. Básicamente la misma
comprende:
• Dos ondas portadoras múltiplos de la frecuencia base.
• Dos códigos de medición de distancias modulados sobre las anteriores.
• Un mensaje de navegación.
Las frecuencias de las ondas portadoras resultan de multiplicar la frecuencia
fundamental por 154 y 120, con lo que se obtienen dos productos de la banda L del
espectro electromagnético, Ll y L2, tales que: f L1 = f F * 154 = 1575,42MHz => k1 c / f
L1 = 19 cm; f L2 = f F * 120 = 1227,60MHz => k2 c / f L2 = 24 cm, donde: c: velocidad
de la luz en el vacío: 299.792.458m/s, y k: longitud de onda.
SEP = Spherical Error Probable = Error probable esférico.
Sesión: Es el conjunto de datos crudos colectados simultáneamente con dos o más
receptores durante el curso de un proyecto GPS determinado.
SIRGAS: Acrónimo de Sistema de Referencia Geocéntrico para América del Sur,
fue creado con el objetivo de definir un sistema de referencia para Sudamérica,
establecer y mantener una red de referencia y establecer un dato geocéntrico, Dicha
red está integrada por unas 57 estaciones diseminadas por el continente. El sistema de
referencia SIRGAS es un ITRF.
SPS = Standar Position Service: Servicio normal ofrecido por el sistema GPS a los
usuarios civiles a través de una sola frecuencia y el código C/A. Con la disponibilidad
selectiva activada garantiza un error menor a 100m en una posición horizontal (2D) el
95% de las veces usando la técnica de posicionamiento autónomo.
SNR = Relación señal-ruido: También llamado "nivel de señal", es una medida de
cuánto afecta el ruido la fidelidad de la señal GPS y se define como el cociente:
potencia de la señal / potencia del ruido por lo tanto, más pura será la información
cuanto mayor resulte el SNR, así como en la medida que la razón decrece, la señal se
pierde en el ruido y la medida resulta inexacta.
Stop and go = Método semi-cinemático. Método de posicionamiento relativo en el
cual el receptor rover permanece estacionarlo por varios segundos sobre cada punto y
mantiene el contacto con los satélites mientras se desplaza.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 119
SV = Vehículo espacial = Satélite.
TDOP: DOP correspondiente a la determinación del tiempo.
Tiempo GPS: En el sistema GPS el tiempo es mantenido internamente según una
escala continua propia denominada Tiempo GPS dado por un reloj compuesto que
comprende los relojes de todas las estaciones monitoras en operación y la frecuencia
estándar de los satélites. El mismo está referido al Reloj Principal (Master Clock) del
Observatorio Naval de los Estados Unidos de Norteamérica (USNO) y adaptado a las
fracciones del Tiempo Universal Coordinado con un grado de coincidencia básica del
orden de algunas centenas de nanosegundos, pero como el tiempo GPS no es
corregido con los "leap seconds" la diferencia con el UTC va incrementándose
paulatinamente, aunque ambos sean atómicos.
3D: Posicionamiento de un punto en tres dimensiones: latitud, longitud y altura.
Triple diferencia: Diferencia de dobles diferencias de observaciones de fase. Las
triples diferencias cancelan la ambigüedad y son útiles para detectar ciclos perdidos.
Troposfera: Capa atmosférica de unos 40km de espesor, en contacto con la
superficie terrestre, dentro de la cual se presentan los distintos fenómenos
meteorológicos. La propagación de la señal depende fundamentalmente del vapor de
agua contenido y de la temperatura de los sucesivos estratos.
UERE: Acrónimo de User Equivalent Range Error, es el efecto combinado de la
indeterminación de las efemérides, errores de propagación, errores de reloj y tiempo y
ruido del receptor, proyectado sobre la línea observador-satélite.
URA: Es una predicción del máximo UERE total (menos el error ionosférico) que
trasmite el mensaje de navegación de cada satélite.
UTC: El Tiempo Universal Coordinado es un tiempo atómico notablemente exacto
y estable que mediante la inserción de saltos de un segundo (leap second) se mantiene
muy próximo al tiempo universal corregido de las variaciones estacionales de la
rotación terrestre.
UTM = Mercator Transversa Universal: Es un caso especial de la proyección
Mercator Transversa la cual consiste en dividir el elipsoide terrestre en 60 zonas
norte-sur de 6º de amplitud en longitud cada una, numeradas de 0 a 60 hacia el Este, a
partir del antemeridiano de Greenwich. Aunque parecida a la Gauss-Kruger las
diferencias entre ambas son importantes: 1) El ancho de faja es 6º. 2) En UTM el
cilindro auxiliar es secante y la deformación para el meridiano central es k = 0,9996
mientras que las líneas de k = 1 se hallan a lº 3' de aquél. 3) Un punto se determina
por el par N,E (Norte, Este) y no X,Y. 4) La coordenada Norte (N) tiene como origen

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 120
un punto ubicado a 10.000.000m. del ecuador -valor conocido como "falso norte"- el
cual no coincide con el polo. 5) El sistema de abscisas y ordenadas es el mismo para
las 60 zonas por lo que es preciso al presentar las coordenadas de un punto agregar el
número de zona correspondiente.
VDOP: DOP para el posicionamiento vertical. (Ver PDOP).
Vertical: Recta cuya dirección es perpendicular al geoide en todos sus puntos, por
lo tanto se la puede materializar con el hilo de la plomada. Generalmente no coincide
con la normal al elipsoide, formando ambas un ángulo denominado "desviación de la
vertical".
Waypoint: Un waypoint es un par de coordenadas, latitud y longitud, o norte y
este, con un nombre y número asignado, que representa un punto geográfico de
interés.
WGS 84 = World Geodetic System 1984: Es el sistema de referencia mundial de
uso más extendido. Definido y mantenido por la Defense Mapping Agency (DMA) de
los Estados Unidos, es el datum al cual se relaciona toda la información del
posicionamiento GPS por utilizarlo justamente para sus mensajes de navegación. La
materialización del mismo es un catálogo de coordenadas de más de 1500 estaciones
geodésicas distribuidas por todo el mundo. WGS84 está determinado por un conjunto
de parámetros primarios y secundarios. Los primeros para definir: dimensiones,
forma, velocidad angular y masa de la Tierra. Los segundos detallan un modelo
gravitatorio terrestre y son necesarios para describir las órbitas satelitales. La DMA
ha mejorado la definición original recalculando en dos ocasiones, 1994 y 1996, las
coordenadas de las estaciones de rastreo GPS. En la última oportunidad se determinó
el actual sistema de referencia designado como WGS84 (G873) vigente desde el 29
de enero de 1997, consistente con el ITRF94 a nivel de unos pocos cm.
WGS72: Predecesor del WGS 84. Usado hasta 1986 sus parámetros eran: a =
6378135m; 1/f = 298.26.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 121
8.- REFERENCIAS BIBLIOGRÁFICAS
Arana Ibarra, L.I (1975). Topografía, Geodesia y Astronomía de Posición. Ed Urmo,
Bilbao.
Ashjaee J. y Lorentz R. (1992). Precision GPS Surveying After Y-Code, Ashtech Inc.
Asamblea Nacional de Geodesia y Geofísica, Notas. Publicaciones de las distintas
Asambleas (IV,V,VI,VII). Madrid, 1981/1990.
Baarda, W. Sratistical concepts in geodesy. Netherlands, 1967.
Badekas, J.: Investigations related to the establishment of a world Geodetic System.
Department of Geodetic Science. Columbus, Ohio1969.
Baker T. F., Curtis D. J. y Dodson A. H. (1995). Ocean Tide Loading and GPS. GPS
World. Marzo de 1995.
Berné Valero, J.L.; Quintanilla I. (1998): GPS en Tiempo Real. U. P. Valencia.
Beutler G., Brockmann E., Gurtner W., Hugentobler U., Mervart L., Rothacher M., y
Verdun A. (1994). Extended orbit modeling techniques at the CODE processing center of
the international GPS service for geodynamics (IGS): theory and initial results.
Manuscripta geodaetica, nº19.
Beutler G. (1993). The 1992 IGS Test Campaign, Epoch '92 and the IGS Pilot
Service: An Overview, Proc. of the 1993 IGS Workshop. Ed: Beutler-Brockmann. Univ. de
Berna, Suiza.
Blachut T. J., Chrzanowski A., Saastamoinem, J.H. (1979). Cartografía y
levantamientos urbanos. Springer-Verlag. New york Inc.
Blewitt, G., Van Dam T., Heflin M. B. (1994). Atmospheric Loading Effects and
GPS Time-Averaged Vertical Positions. Proceedings of the 1st International Symposium
on Deformation in Turkey. Estambul, Turquia.
Bomford, G. (1979). Geodesy. Clarendor Press.Oxford.
Boucher C., Altamimi Z. and Duhem L. (1994). Resultados y Análisis del ITRF93,
Nota Técnica 18. Observatorio de Paris, Octubre de1994.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 122
Breach M. C. (1990). The importance of accurate coordinates of a known station in
precise relative positioning. Survey Review, nº 30.
Caillemar, A; Le Cocg, C.: Astronomie de Position, Geodesie. Societés des editions
Technip. París, 1983.
Capdevila,
Catalán, M.: La limitación del modelo de fuerzas en la definición del sistema de
referencia. Instituto y Observatorio de la marina. Escuela de estudios superiores de
Ciencias Físico-Matemáticas de la Armada, 1989.
Cid, R. Ferrer, S. (1998). Geodesia Geométrica, Física y por Satélite. IGN, CNIG.
Madrid.
Chueca, M.; Herraéz, J.; Berné, J.L. Redes Topográficas y Locales. Microgeodesia.
Ed. Paraninfo, 1996.
Chueca Pazos, M: “Topografía”. Tomos I y II Editorial Dossat, S.A. Madrid, 1982.
Caturla, J.L.: Sistemas de posicionamiento global. IGN, Madrid 1988
Delikaraglou D., Steeves R.R. y Beck N. (1986). Development of a Canadian Active
Control System Using GPS, Fourth International Geodetic Symposium on Satellite
Positioning. Austin, Texas, Mayo de 1986.
Dixon, C. (1994). GPS: Qué es, para que sirve, como se usa. ed. Noray.
DMA - Defence Mapping Agency (1987). Department of Defence World Geodetic
System 1984- Its Definition and Relationships With Local Geodetic Systems, DMA Tec.
Report 8350.
Dodson A. H., Hill C. J. and Shardlow P. J. (1993). The effects of Error Propagation
on GPS Measurements. Sixth International Seminar on the GPS, Universidad de
Nottingham.
Dominguez Preciado, A.( 1994). Apuntes de Ajustes de Observaciones. EUIT
Topográfica U.P. de Madrid.
Estrada, R. (1992). Sistemas y Marcos de Referencia. Revista Mapping.
Ferrer, R.; Piña, B.: Geodesia Geométrica. Dpto. Expresión Gráfica; Universidad de
Cantabria. Santander, 1992.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 123
Ferrer Torio, R.; Piña Patón, B.; Núñez-García del Pozo, A.; Valbuena Duran, J.L.;
Martínez López, I.: Sistema de Posicionamiento Global (GPS). Servicio de Publicaciones
de la ETS de Ingenieros de Caminos, Canales y Puertos. Santander, 1991.
Fortes L. S. (1991). Brazilian Network for Continuous Monitoring of the Global
Positioning System: RBMC, In: Mader G.L. (ed): Permanent Satellite Tracking Networks
for Geodesy and Geodynamics, Springer, New York, Berlin, (ed): IAG Symposia 109].
Gemael C. (1993). Ajuste de Observaciones Geodésicas. Ed.UFPR, Curitiba.
Gibbons G. (1996). A National GPS Policy. GPS World. Mayo de 1996.
Goad C. (1993). IGS Orbits Comparisons, Proceedings of the 1993 IGS Workshop.
Ed. G.Beutler y E. Brockmann. Universidad de Berna, 1993.
Grafarend, E.W.; Sansò, F. (1985). Optimization and design of geodetic networks.
Springer- Verlag. Berlín.
Groten, E.; Stanb, R. (1988). GPS- Techniques Applied to Geodesy and Surveying.
Springer-Verlag.
Heiskanen, W.; Moritz, H. (1985): Geodesia Física. Instituto de Astronomía y
Geodesia; IGN. Madrid.
Heitz, S. (1985): Coordinates in geodesy. Springer. Berlin.
Hoar, G.J. (1983): Topografía por satélite. Magnavox. Torrance, California.
Hofmann-Wellenhof B., Lichtenegger H. and Collins J. (1992). GPS Theory and
Practice, Spring-Verlag. Berlin.
Hooijberg, M. (1997). Practical Geodesy. Ed. Springer, New York.
Hotine, M. 1986.: Mathematical Geodesy. U.S. Department of commerce.
Washington.
Instituto Geográfico Nacional: Descripción del Proyecto RECORD. www.ign.es.
Klobuchar J. A. (1986). Design and Characteristics of the GPS Ionospheric Time
Delay Algorithm for Single Frequency Users. Proceedings of the PLANS-86 conference,
Las Vegas.
Krakinsky, E.J. y Thomson, D.B. (1974): Satellite Networks. The Canadian Surveyor.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 124
Krakinsky, E.J.; Thomsin, D.B. (1974): Mathematical Models for combination of
terrestrial and satellite networks. The Canadian Surveyor.
Lachapelle G., Killand P. and Casey M., (1992). GPS For Marine Navigation and
Hydrography. International Hydrographic Review, Monaco
Laurila, S., Harris, W.D. (1983): Electronic surveying in practice. Editorial John
Wiley & Sons. New York.
Langley R. B. (1995). Propagatioin of GPS Signals. GPS Receivers and the
Observables. Notas de la Escuela Internacional de Geodesia. Delft, Holanda.
Leick A. (1990) GPS Satellite Surveying, New York, John Wiley & Sons.
Levallois, J.J.: Géodésie générale. Editorial Eyrolles. París,1971.
Mailing, D.H.( 1992). Coordinate systems and map projections. Pergamon Press.
Oxford.
Martín Asín, F.: Geodesia y Cartografía matemática. editorial Paraninfo, Madrid
1983.
McCarthy D. D. (1992). IERS Standards (1992). IERS Nota Técnica 13, Central
Bureau of IERS- Observatorio de Paris.
Mikhail, E.M., Gracie, G. (1981): Analysis and adjustment of Survey Measurements.
New York: Reinhold.
Moritz, H. (1984): Cursillos de Geodesia superior. Instituto Geográfico Nacional.
Madrid.
Mueller T. (1994). Wide Area Differential GPS. GPS World. Junio de 1994.
Newby S. P. y Langley R. B. (1992). Three Alternative Empirical Ionospheric
Models- Are They Better Than the GPS Broadcast Model. Proceeding of Sixth
International Geodetic Symposium on Satellite Positioning.
Newby S. P. and Langley R. B. (1990). Ionospheric Modelling for Single Frequency
Users of the Global Positioning System: A Status Report. Proceedings of Second
International Symposium on Precise Positioning with the Global Position System. Otava,
Canadá.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 125
Núñez García del Pozo, A.; Valbuena Duran, J.L.: Evolución de la Geodesia.
Servicio de publicaciones de la ETS de Ingenieros de Caminos de Santander, 1990.
Parkinson and Spilker. (1996). Global Position System: Theory and Aplications.
Axerland and Enje Assoc. Eds.
Ruíz Morales, M. (1991): Manual de Geodesia y Topografía. Proyecto Sur de
Ediciones. Granada.
Santos M. C. (1995). On Real Orbit Improvement for GPS Satellites, PhD Thesis,
The University of New Brunswick.
Seeber G. (1993). Satellite Geodesy: foundations, methods and applications. Ed.
Walter de Gruyter. Berlin, New York.
Sevilla, M.J., Nuñez, A. y Valbuena, J.L.: VII Curso de Geodesia Superior. Instituto
de Astronomía y Geodesia. Madrid, 1991.
Sevilla, M.J., Linkwitz, H. y Henneberg, H.: III Curso de Geodesia superior.
Instituto Geográfico Nacional. Madrid. 1986.
Sideris M. G. and She B. B. (1995). A new, high-resolution geoid for Canada and
part of the U.S. by the 1D-FFT method. Bulletin Géodésique nº 69.
Spilker J.J. (1980). GPS Signal Structure and Performance Characteristics, Global
Positioning System. Vol I, The Institute of Navigation, ISBN: 0-936406-00-3.
Talbot N. C. (1992). Recent Advances in GPS Surveying. Aplicaciones y Notas
técnicas. Publicación de Trimble Navigation.
Tardy, L. (1981.): Traite de Geodesie. editorial Gauthier-Vilars. París.
Teunissen P,. J. G. (1995). GPS Carrier Phase Ambiguity Fixing Concepts, Lecture
Notas de la Escuela Internacional de Geodesia. Delft, Holanda.
Teunissen P. J. G. (1991). GPS Diferencial: Conceptos y Control de calidad,
Netherlands Instituto de Navegación (NIN). Amsterdan, Holanda.
Teunissen P. J. G. (1990). Mathematische Geodesie, Facultad de Geodesia. Delft,
Holanda.
Teunissen, P.J.: Quality control Geodetic . Optimization of Geodetic Networks.
editorial Grafarend Sansó, 1984.

EL SISTEMA DE POSICIONAMIENTO GLOBAL
Guillermo Píriz Mira 126
Torge, W.: Geodesia. editorial Diana. Mexico, 1983.
Turner, S.: Applied Geodesy. Springer-Verlag, 1987
Udias, A., Mezcua, I.: Fundamentos de Geofísica. Editorial Alhambra. Madrid, 1986.
Underhill and Underhill, Usher Canada Limited and UGC Consulting Ltd. (1993).
ACS Applications Definition & Feasibility Study, British Columbia Ministry of
Environment and Parks Survey & Resource Mapping Branch. ISBN 0-7726-1626.
Unión Europea. Informe General de la Comisión nº399 sobre Galileo. Febrero
de1999.
Van Dam T. M y Wahr J. M. (1987). Displacements of the Earth's Surface Due to
Atmospheric Loading: Effects on Gravity and Baseline Measurements. Journal of
Geophysical Research, Vol. 92.
Vanícek P. y Krakiwsky E. (1986). Geodesy: The Concepts. Amsterdam, Holanda.
Wanminger L. (7/1993). Effects of the Equatorial Ionosphere on GPS. GPS World.
Wells D., Beck N., Delikaraoglou D., Kleusberg A., Krakiwsky E. J., Lachapelle G.,
Langley R. B., Nakiboglu M., Schwarz K.P., Tranquilla J. M., Vanicek P. (1986). Guide
to GPS Positioning. Canadian GPS Associates. Canadá.
Wolf, P.R. (1987): Adjustment Computations (practical Least Squares for
Surveyors). Landmark Enterprises. California.
Zakatov, P.S.: Curso de Geodesia Superior. Editorial Mir. URSS, 1981.