TIPO DE DOCUMENTO Proyecto de Grado DISEÑO Y...
166
1 TIPO DE DOCUMENTO Proyecto de Grado TITULO DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CAVITACIÓN ACÚSTICA, CON FINES DE LIMPIEZA INDUSTRIAL AUTOR NIÑO, Ramírez Juan Pablo; MENDEZ, Suarez Jorge Andrés; SALAS, Lozano Lorena del Pilar. LUGAR Bogotá D.C FECHA Noviembre del 2010 PALABRAS CLAVES Cavitación, Transductor ultrasónico, Ultrasonido, Piezoeléctrico, Conmutación, Potencia, Amplificación, Limpieza, Onda sonora, Generación. DESCRIPCIÓN DEL TRABAJO Este proyecto, consiste el la utilización de la frecuencias ultrasónicas para lograr la limpieza de los elementos expuestos a ella. Dicho proceso de limpieza ultrasónica esta ligado al fenómeno de la cavitación, inducida acústicamente; el cual consiste básicamente en generar el crecimiento e implosión de burbujas de aire dentro de un líquido, debido a los cambios de presión. LÍNEA DE INVESTIGACIÓN Este proyecto, se desarrolla en el marco de la línea institucional de la facultad de ingeniería, diseño de sistemas de sonido FUENTES CONSULTADAS L.D. ROSEMBERG, el ultrasonido y sus aplicaciones; Traducción directa del ruso. Eugenia Fisher; Editorial Lautaro; • A.P. CRACKNELL, Ultrasonidos. Madrid: Paraninfo; • INSTITUTO DE ACÚSTICA, desarrollo de sistemas acústicos para el tratamiento de fluidos. Escalamiento de prototipos de laboratorio a sistema industrial. Paper disponible en www.digital.csic.es/bitstream/10261/7133/1/ult26.pdf, [Consultado el 30 de abril de 2009]. • MOSQUERA, Jaime. Sistema de adquisición de datos provenientes de un transductor de ultrasonido de alta frecuencia. Bogotá D.C., 2009, 16 p. Trabajo de grado (Tecnología en electrónica). Universidad de San Buenaventura. Facultad de Ingeniería. • Brennen, Cristopher Earls. Cavitation and Bubble Dynamics. Oxford University Press 1995.• Azar, Lawrence. Cavitation in Ultrasonic Cleaning and Cell Disruption. Controlled Environments, Febrero 2009. • Azar, Lawrence. Understanding and Evaluating ultrasonic and megasonic cleaners. Process Cleaning Magazine. September 2007. CONTENIDO Objetivo General Diseñar y construir un prototipo de cavitación acústica, con fines
Transcript of TIPO DE DOCUMENTO Proyecto de Grado DISEÑO Y...

1
TIPO DE DOCUMENTO Proyecto de Grado
TITULO DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CAVITACIÓN ACÚSTICA, CON FINES DE LIMPIEZA INDUSTRIAL
AUTOR NIÑO, Ramírez Juan Pablo; MENDEZ, Suarez Jorge Andrés; SALAS, Lozano Lorena del Pilar.
LUGAR Bogotá D.C
FECHA Noviembre del 2010
PALABRAS CLAVES Cavitación, Transductor ultrasónico, Ultrasonido, Piezoeléctrico, Conmutación, Potencia, Amplificación, Limpieza, Onda sonora, Generación.
DESCRIPCIÓN DEL TRABAJO
Este proyecto, consiste el la utilización de la frecuencias ultrasónicas para lograr la limpieza de los elementos expuestos a ella. Dicho proceso de limpieza ultrasónica esta ligado al fenómeno de la cavitación, inducida acústicamente; el cual consiste básicamente en generar el crecimiento e implosión de burbujas de aire dentro de un líquido, debido a los cambios de presión.
LÍNEA DE INVESTIGACIÓN Este proyecto, se desarrolla en el marco de la línea institucional de la facultad de ingeniería, diseño de sistemas de sonido
FUENTES CONSULTADAS
L.D. ROSEMBERG, el ultrasonido y sus aplicaciones; Traducción directa del ruso. Eugenia Fisher; Editorial Lautaro; • A.P. CRACKNELL, Ultrasonidos. Madrid: Paraninfo; • INSTITUTO DE ACÚSTICA, desarrollo de sistemas acústicos para el tratamiento de fluidos. Escalamiento de prototipos de laboratorio a sistema industrial. Paper disponible en www.digital.csic.es/bitstream/10261/7133/1/ult26.pdf, [Consultado el 30 de abril de 2009]. • MOSQUERA, Jaime. Sistema de adquisición de datos provenientes de un transductor de ultrasonido de alta frecuencia. Bogotá D.C., 2009, 16 p. Trabajo de grado (Tecnología en electrónica). Universidad de San Buenaventura. Facultad de Ingeniería. • Brennen, Cristopher Earls. Cavitation and Bubble Dynamics. Oxford University Press 1995.• Azar, Lawrence. Cavitation in Ultrasonic Cleaning and Cell Disruption. Controlled Environments, Febrero 2009. • Azar, Lawrence. Understanding and Evaluating ultrasonic and megasonic cleaners. Process Cleaning Magazine. September 2007.
CONTENIDO Objetivo General Diseñar y construir un prototipo de cavitación acústica, con fines

2
de limpieza en piezas metálicas pequeñas. Objetivos Específicos Diseñar y construir circuito que permita generar la señal ultrasónica. Diseñar y construir el circuito que permita la amplificación de la señal ultrasónica, con la potencia requerida. Diseñar el contenedor de líquido requerido para el proceso de limpieza por cavitación acústica. Teniendo en cuenta características como el desagüe y la ubicación del transductor. Desarrollar y aplicar un método de prueba que establezca el grado de efectividad del prototipo según el tipo de suciedad a remover. MARCO TEÓRICO-CONCEPTUAL Ultrasonido. Transductores de ultrasonido. Inversores modulados por ancho de pulso. Principio de operación. Cavitación acústica. Comportamiento de la acústica subacuática del sonido. Ondas acústicas. Tipos de onda. Fenómenos de refracción. Pérdida por transmisión. Limpieza industrial. Tipos de limpieza industrial y sus mecanismos. Métodos de limpieza industrial. Limpieza por ultrasonido. DESARROLLO INGENIERIL Generación ultrasónica. Adquisición del transductor ultrasónico. Funcionamiento del transductor CN4038-50 LA. Generación de la señal ultrasónica. Amplificador de la señal. Alimentación eléctrica del dispositivo. Diseño del contenedor.
METODOLOGÍA
ENFOQUE DE LA INVESTIGACIÓN El enfoque de la investigación es empírico-analítico que se centra principalmente en el estudio técnico de las frecuencias e intensidades producidas por el ultrasonido por medio líquido, además de reconocer y estudiar el fenómeno de cavitación acústica; donde se elabora un producto que desarrolle un proceso aplicable para ciertos campos de la ingeniería de sonido. LÍNEA DE INVESTIGACIÓN DE USB / SUB- LÍNEA DE FACULTAD / CAMPO TEMATICO DEL PROGRAMA
3
Línea de investigación de la Universidad: Tecnologías actuales y sociedad. A través de la historia y durante el desarrollo de la ciencia, la sociedad requiere día a día la constante renovación e implementación de nuevas tecnologías que busquen aumentar la calidad de vida del ser humano. La ciencia y la tecnología brindan la posibilidad de mejorar y dar soluciones a problemas que se presentan diariamente en todos los procesos de la industria. Este proyecto hace uso de tecnologías de vanguardia y conocimientos actualizados sobre temas específicos para presentar una solución viable dentro del campo ingenieril con el fin de dar respuesta a los problemas y satisfacer necesidades que la sociedad presenta. Es importante que el proceso de investigación este enfocado a contribuir con el desarrollo técnico y científico del profesional; que además integre distintas aéreas del conocimiento desarrolladas a lo largo de la carrera, y que permita un desarrollo íntegro del estudiante como profesional. Sub- línea de investigación: Instrumentación y control de procesos. La instrumentación y el control de procesos es un campo de la ingeniería que busca implementar y manejar tecnologías que tengan un alto impacto y presenten aportes científicos a los procesos industriales en los que haga parte el hombre. Este proyecto tiene como finalidad y aplicabilidad el desarrollo del proceso de limpieza con ultrasonido, el cual, es de gran ayuda y muy utilizado con alto grado de eficiencia en la limpieza de partes de la industria en general. Campo temático del programa: Diseño de sistemas de sonido y acústica.
El diseño de sistemas de sonido comprende el desarrollo de prototipos para la generación de señales. Este proyecto tiene como parte fundamental el diseño y construcción de un sistema para la generación y amplificación de ondas ultrasónicas. Con respecto a la acústica, se estudia el fenómeno de la cavitación, el cual es la base teórica del proyecto así como también el comportamiento subacuático del ultrasonido.
CONCLUSIONES
La cavitación acústica es un fenómeno sonoquímico, que está presente en toda la naturaleza; y a pesar de sus propiedades corrosivas en la industria humana, es posible generar este fenómeno de una manera controlada y aplicable a los distintos requerimientos. La limpieza por cavitación acústica, se encuentra directamente relacionada a varios factores que influyen en su
4
comportamiento; como los son los acústicos, en donde se tienen en cuenta la fuente ultrasónica, el tipo de onda o señal a utilizar y la superficie transductora; factores electrónicos en la generación ultrasónica, como la ganancia de voltaje, la potencia del transductor y la frecuencia de operación; factores en el liquido contenedor como la temperatura, el volumen del agua y demás características químicas del mismo; el tiempo de exposición a la cavitación y factores exógenos como el tipo de suciedad a remover, en los diferentes elementos expuestos a este fenómeno. El prototipo de limpieza por cavitación acústica presentado en este proyecto, puede llegar a una efectividad de limpieza en condiciones óptimas (agua con temperatura cercana al punto de ebullición, tres minutos de exposición y la ayuda de un disolvente) de 40%. El prototipo de limpieza por cavitación acústica, propuesto en este proyecto, tiene como valor agregado, que para tan un volumen de agua tan pequeño, se está utilizando una transductor adicional que el requerido por las formulas, además de estar operando directamente sobre el agua o liquido contenedor; esto con el fin de ofrecer un mayor fuerza cavitatoria en el interior del tanque y poder obtener así un mejor índice de limpieza. Para el buen funcionamiento de los transductores ultrasónicos piezoeléctricos, con generadores del tipo inversor de medio puente, es necesario realizar un acople de impedancias, ya que la carga capacitiva de los transductores no es compatible con la señal generada por el circuito electrónico. En este acople es necesario ubicar una carga de impedancia que estabilice la señal antes de ser enviada al transductor piezoeléctrico. Para efectos del funcionamiento del proyecto en mención, dicho acople fue logrado con un bombillo de 100 watts. La potencia mínima requerida para generar cavitación acústica, dentro de un contenedor con capacidad de un galón, es de 63,37 watts. El prototipo presentado en este proyecto de grado, es capaz de generar la potencia necesaria para garantizar el efecto de la cavitación acústica, en un volumen de de agua de 5,67 galones.

5
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CAVITACIÓN ACÚSTICA,
CON FINES DE LIMPIEZA INDUSTRIAL.
LORENA DEL PILAR SALAS LOZANO
JUAN PABLO NIÑO RAMIREZ
JORGE ANDRES MENDEZ SUAREZ
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERIA
INGENIERIA DE SONIDO
BOGOTA D.C.
2010

6
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CAVITACIÓN ACÚSTICA,
CON FINES DE LIMPIEZA INDUSTRIAL.
LORENA DEL PILAR SALAS LOZANO
JUAN PABLO NIÑO RAMIREZ
JORGE ANDRÉS MÉNDEZ SUAREZ
Trabajo de grado para optar por el título de Ingeniero de Sonido
INGENIERO. DARIO PAEZ
ASESOR
UNIVERIDAD DE SAN BUENAVENTURA
FACTULTAD DE INGENIERIA
INGENIERIA DE SONIDO
BOGOTA D.C.
2010

7
Nota De Aceptación:
_______________________________
_______________________________
_______________________________
_______________________________
_______________________________
_______________________________
_______________________________
_______________________________
_______________________________
_______________________________
_____________________________________________
Firma Del Presidente Del Jurado
_____________________________________________
Firma Del Jurado
____________________________________________
Firma Del Jurado
Bogotá D.C., de 2010

8
Dedico este triunfo primero que todo a Dios padre todopoderoso que siempre me
acompañó, me iluminó en cada día de clase, me llenó de bendiciones y fue quien me
guió durante todo este proceso, gracias a Él soy Ingeniero. A mi padre José, a mi
madre Beatriz y a mi hermano José Andrés, quienes son motivo de mi inspiración, por
quienes busco cada día ser mejor y vivir para hacerlos felices. A mi abuelo José de
Jesús por su bendición cada vez que viajaba para Bogotá. A mi tía Mercedes por todo
el cariño y el aprecio que me tiene, espero que estés donde estés siempre seas feliz.
A mi tía Aminta porque siempre me apoyo y creyó en mí desde que nací. Al hermano
Joaquín por su confianza en mí desde que estaba en el colegio, al padre Fernando
Garzón y al padre José Wilson Téllez por la oportunidad tan grande que me dieron de
estudiar en la USB. A mis amigos en Barranquilla porque siempre estuvieron
pendientes de mi estudio deseando lo mejor. A todos gracias por hacer parte de este
logro tan importante.
Juan Pablo Niño Ramírez
Dedico este logro a Dios, a mi mamá y hermana quienes son la mejor razón de mi
vida; a mi familia y a todos los que aportaron para poder culminar este cometido.
Jorge Andrés Méndez Suarez
Dedico este esfuerzo a mi papito hermoso, a mi mamá por su apoyo incondicional, a
mis hermanos y a toda mi familia que siempre me acompaña, a mis compañeros de
este proyecto muchas gracias por ser parte de este logro tan importante en mi vida y
Dios que siempre me ilumina y me acompaña.
Lorena del Pilar Salas lozano

9
Al Ingeniero de Sonido Ismael Ortega por su ayuda y orientación en la creación de
este proyecto.
Al Ingeniero electrónico Nelson Acosta por su colaboración y dedicación en la
culminación de este proyecto.
A ClangSonic por la información técnica puntual proporcionada y por proveer los
transductores electrónicos.
Al Ingeniero de Sonido Darío Páez por creer en nuestro proyecto cuando este se
encontraba en una etapa decisiva.
A la universidad de San Buenaventura sede Bogotá y la universidad Distrital Francisco
José de Caldas por permitirnos utiliza sus instalaciones.

10
CONTENIDO
Pág.
INTRODUCCION 19
1 PLANTEAMIENTO DEL PROBLEMA 21
1.1 ANTECEDENTES
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA 25
1.3 JUSTIFICACIÓN 25
1.4 OBJETIVOS DE LA INVESTIGACIÓN 26
1.4.1 Objetivo general 26
1.4.2 Objetivos específicos 26
1.5 ALCANCES Y LIMITACIONES DEL PROYECTO 27
1.5.1 Alcances. 27
1.5.2 Limitaciones. 27
2 MARCO DE REFERENCIA 28
2.1 MARCO TEÓRICO-CONCEPTUAL 28
2.1.1 Ultrasonido. 28
2.1.2 Transductores de ultrasonido. 35
2.1.3 Inversores modulados por ancho de pulso. 36
2.1.3.1 Principio de operación. 39
2.1.4 Cavitación acústica. 40
2.1.5 Comportamiento de la acústica subacuática del sonido. 46
2.1.5.1 Ondas acústicas. 47
2.1.5.2 Tipos de onda. 48
2.1.5.3 Fenómenos de refracción. 48
2.1.5.4 Pérdida por transmisión. 51
2.1.6 Limpieza industrial. 52
2.1.6.1 Tipos de limpieza industrial y sus mecanismos. 53
2.1.6.2 Métodos de limpieza industrial. 54
2.1.6.3 Limpieza por ultrasonido. 55
2.2 MARCO LEGAL O NORMATIVO 56
2.2.1 Otras. 59

11
2.2.1.1 Recomendaciones. 59
3 METODOLOGÍA 65
3.1 ENFOQUE DE LA INVESTIGACIÓN 65
3.2 LÍNEA DE INVESTIGACIÓN DE USB / SUB-LÍNEA DE FACULTAD /
CAMPO TEMÁTICO DEL PROGRAMA 65
3.3 TÉCNICAS DE RECOLECCIÓN DE INFORMACIÓN 66
3.3.1 Instrumento de medición análoga/digital. 66
3.3.2 Prototipo de generación ultrasónica. 66
3.3.3 Instrumento de captura. 66
3.3.4 Desarrollo de las pruebas. 66
3.4 HIPÓTESIS 66
3.5 VARIABLES 67
3.5.1 Variables Independientes. 67
3.5.2 Variables Dependientes. 67
4 DESARROLLO INGENIERIL 68
4.1 Generación ultrasónica. 68
4.1.1 Adquisición del transductor ultrasónico. 68
4.1.2 Funcionamiento del transductor CN4038-50 LA. 73
4.1.3 Generación de la señal ultrasónica. 79
4.1.4 Amplificador de la señal. 91
4.1.5 Alimentación eléctrica del dispositivo. 95
4.2 Diseño del contenedor. 98
5 ANÁLISIS DE RESULTADOS 104
5.1 Análisis electrónico. 104
5.2 Comprobación de limpieza. 108
5.3 Efectividad del prototipo 126
5.3.1 Amplitud de la onda. 126
5.3.2 Densidad de cavitación. 129
6 CONCLUSIONES 130
7 RECOMENDACIONES 132

12
BIBLIOGRAFÍA 133
ANEXOS 136

13
LISTA DE FIGURAS
Pág.
Figura 1. Maquina de limpieza con ultrasonido. 18
Figura 2. Aplicaciones del ultrasonido según su frecuencia. 24
Figura 3. Escala de frecuencias acústicas . 25
Figura 4. Rango audible de algunos animales en la naturaleza. 27
Figura 5. Efectos fisiológicos producidos por la exposición a ultrasonidos
por vía aérea. 30
Figura 6. Diagrama de polarización. 32
Figura 7. Circuito inversor de medio puente. 35
Figura 8. Forma de onda de carga resistiva. 36
Figura 9. Formación de cavitación por efectos del ultrasonido. 38
Figura 10. Compresión y rarefacción de una onda ultrasónica. 39
Figura 11. Efectos de la cavitación sobre una pieza de motor. 41
Figura 12. Patrón de interferencia en R entre el sonido originado por la fuente S
y la imagen de la superficie S’. 46
Figura 13. Limites de exposición en dB frecuencias ultrasónicas. 56
Figura 14. Límites de exposición por contacto propuesto por Nyborg. 58
Figura 15. Símbolo de peligro por exposición a ultrasonidos. 59
Figura16. Diagrama de flujo sobre el circuito eléctrico. 64
Figura 17. Transductor 4012 ª. 66
Figura 18. Generador y osciloscopio de la USB. 67
Figura 19. Dimensiones del transductor CN4038-50 LA. 72
Figura 20. Superficie de radiación del transductor ultrasónico CN4038-50 LA. 72
Figura 21. Placas de cerámica del transductor ultrasónico CN4038-50 LA. 73
Figura 22. Placas de polarización. 74
Figura 23. Placa posterior del transductor. 74
Figura 24. Configuración interna del microcontrolador TL494. 76
Figura 25. Diagrama de bloque funcional. 77
Figura 26. Circuito operacional y forma de onda. 78
Figura 27. Formación de la señal cuadrada. 79
Figura 28. Conmutación, de tiempo muerto. 80
Figura 29. Operación de los Optoacopladores en los transistores Mosfet. 82

14
Figura 30. Diagrama de conexión del optoacoplador HCPL-4503. 83
Figura 31. Diagrama de conexión del driver TC4421. 84
Figura 32. Circuito de generación y conmutación. 86
Figura 33. Flujo de corriente en el circuito de amplificación. 88
Figura 34. Configuración del Mosfet IRF730. 89
Figura 35. Circuito de amplificación. 91
Figura 36. Diagrama interno de un regulador 7805 y 7809. 92
Figura 37. Configuración de pines regulador LM7805. 93
Figura 38. Diseño del circuito a partir de los reguladores lm7805 y lm7809. 94
Figura 39. El diseño del contenedor. 95
Figura 40. Disposición de los transductores y el sistema de desagüe
en el tanque contenedor. 99
Figura 41. Salida del circuito integrado TL 494. 100
Figura 42. Salida del negador. 101
Figura 43. Salida de la señal en el optoacoplador. 102
Figura 44. Comportamiento del driver de corriente. 103
Figura 45. Señal de entrada a los Mosfet. 104
Figura 46. Escala de valores de apreciaciones subjetivas de limpieza. 106
Figura 47. Comportamiento en aserrín en agua con cavitación. 109
Figura 48. Comportamiento de arena en agua con cavitación. 110
Figura 49. Comportamiento de esmalte en agua con cavitación. 110
Figura 50. Comportamiento de tinta en agua con cavitación. 111
Figura 51. Comportamiento de vaselina en agua con cavitación. 111
Figura 52. Cavitación en un galón de agua. 116
Figura 53. Cavitación con 20% de alcohol. 117
Figura 54. Cavitación con agua caliente. 118
Figura 55. Cavitación promedio. 119
Figura 56. Comportamiento final del prototipo de cavitación. 120
Figura 57. Papel aluminio expuesto a 10 minutos de cavitación. 122
Figura 58. Lamina de aluminio expuesta a 10 minutos de cavitación. 122
Figura 59. Cavitación con 120vpp y 140vpp. 124

15
LISTA TABLA
Pág.
Tabla 1. Dimensiones de los transductores de cuarzo y de sus frecuencias de
resonancia. 33
Tabla 2. Efecto de la cavitación en diferentes materiales y líquidos. 41
Tabla 3. Ficha técnica de la norma NTP 205. 53
Tabla 4. Lista de normas para imagenología en aplicaciones medicas. 53
Tabla 5. Límites de exposición en dB a frecuencias ultrasónicas. 56
Tabla 6. Especificaciones transductor 4012 ª. 65
Tabla 7. Comparaciones de voltaje y potencia en el transductor 4012ª. 68
Tabla 8. Datos electrónicos del transductor CN4038-45P8. 69
Tabla 9. Tabla de función. 76
Tabla 10. Condiciones recomendadas de operación. 77
Tabla 11. Elementos electrónicos del montaje del TL 494. 80
Tabla 12. Elementos electrónicos en el optoacoplador HCPL-4503. 83
Tabla 13. Configuración básica Mosfet IRF730. 89
Tabla14. Especificaciones del Mosfet IRF730. 90
Tabla 15. Prueba de control. 107
Tabla 16.prueba de cavitación con alcohol al 20%. 112
Tabla 17. Cavitación en agua caliente. 114
Tabla 18. Cavitación en un galón de agua. 111
Tabla 19. Cavitación con 20% de alcohol. 117
Tabla 20.Cavitación con agua caliente. 118
Tabla 21. Cavitación promedio. 119
Tabla 22. Cavitación promedio simplificada. 120

16
LISTA DE ANEXO
Pág.
Anexo 1. NTP 205: Ultrasonidos: Exposición laboral. 132
Anexo 2. Datos transductor 4038 - 5LA número 1112961. 140
Anexo 3. Datos transductor 4038 - 5LA número 1112962. 141
Anexo 4. Datos transductor 4038 - 5LA número 1112963. 142
Anexo 5. Datos transductor 4038 - 5LA número 1112964. 143
Anexo 6. Datasheet IRF 730. 144
Anexo 7. Datasheet TL 494. 151
Anexo 8. Imagen prototipo de Cavitación Acústica a. 159
Anexo 9. Imagen prototipo de Cavitación Acústica b. 159
Anexo 10. Imagen de circuito de amplificación. 160
Anexo 11. Imagen circuito de generación y conmutación. 160
Anexo 12. Imagen tanque del contenedor de 1 galón. 161

17
GLOSARIO
ACUSTICA: Es una rama de la física interdisciplinaria que estudia el sonido,
infrasonido y ultrasonido es decir ondas mecánicas que se propagan a través de la
materia (tanto sólida como líquida o gaseosa) (no se propagan en el vacío) por medio
de modelos físicos y matemáticos.
ACUSTICA SUBACUÁTICA: Relacionada sobre todo con la detección de objetos
mediante el sonido sonar.
CAVITACIÓN: Formación de cavidades llenas de vapor o de gas en el seno de un
liquido en movimiento, cuando la presión en un punto del liquido resulta menor a la
tensión del vapor.
CONMUTACÓN: el ―Tiempo muerto‖ es el periodo durante una transición de la
conmutación cuando ambos MOSFETS de la salida se conducen en modo del atajo
son ―OFF‖.
ESPECTRO: Distribución de la intensidad de una onda, acústica o electromagnética
en función de la frecuencia.
FRECUENCIA: Numero de vibraciones por unidad de tiempo, en un fenómeno
periódico.
INVERSOR: son convertidores de Corriente Directa a Corriente Alterna. El empleo de
un inversor es cambiar un voltaje de entrada de Corriente Directa a un voltaje simétrico
de salida de Corriente Alterna, con la magnitud y la frecuencia deseada.
LIMPIEZA ULTRASÓNICA: Un limpiador ultrasónico es un dispositivo de limpieza que
utiliza los ultrasonidos (generalmente de 15-400 Khz.) y una adecuada solución de
limpieza para limpiar objetos delicados. Los ultrasonidos no son efectivos sin la
solución de limpieza; éstos precisan una solución apropiada para cada objeto y la
suciedad a limpiar.

18
MAGNETOSTRICCIÓN: se denomina a la propiedad de los materiales magnéticos los
cuales hacen que estos cambian de forma al encontrarse en presencia de un campo
magnético.
ONDA SONORA: Una onda sonora es una onda longitudinal por donde viaja el sonido.
Si se propaga en un medio elástico y continuo genera una variación local de presión o
densidad, que se transmite en forma de onda esférica, periódica o cuasi periódica. Las
variaciones de presión, humedad o temperatura del medio, producen el
desplazamiento de las moléculas que lo forman. Cada molécula transmite la vibración
a la de su vecina, provocando un movimiento en cadena.
PIEZOELECTRICIDAD: Fenómeno presentado por determinantes cristales que al ser
sometidos a tensiones mecánicas adquieren una polarización eléctrica en su masa,
apareciendo una diferencia de potencial y cargas eléctricas.
SONAR: (armónico del ingles Sound Navigation Ranging). Aparato de detección
submarino por medio de ondas ultrasónica, que permiten la localización e
identificación de los objetos sumergidos.
SUCIEDAD: En un modelo simple, la "suciedad" se puede dividir en dos
categorías: Manchas: localizadas, claramente visibles y Suciedad general: dispersa,
menos perceptible, Dado que las manchas son tan visibles, el consumidor juzga la
eficacia de la limpieza basándose, principalmente, en su eliminación.
TRANSDUCTOR: Es un dispositivo capaz de transformar o convertir un determinado
tipos de energía de entrada, en otra de diferente a la salida.
ULTRASONIDO: Es una onda acústica o sonora cuya frecuencia está por encima
del espectro audible del oído humano (aproximadamente 20.000 Hz).

19
INTRODUCCIÓN
Actualmente el ultrasonido se ha convertido en objeto de múltiples estudios, debido a
su amplia gama de aplicaciones, las cuales ocurren en un sin número de disciplinas
como: la química, física, ingeniería, biología, industria alimenticia, medicina,
oceanografía, sismología entre otros. Sin embargo, a pesar del frecuente uso se le da,
existe información básica y fundamental que se desconoce, acerca de las ondas en
frecuencias ultrasónicas, lo cual podría brindar una mejor perspectiva de dicho
fenómeno.
La limpieza por ultrasonido es una disciplina empleada en la actualidad, para alcanzar
altos grados de limpieza, reducir costos, y mejorar los estándares de calidad en la
industria. Además de ser una alternativa eficiente, contribuye de una manera
ecológica, pues se estarían sustituyendo químicos altamente nocivos, por agua y otras
soluciones liquidas menos contaminantes.
Este tipo de limpieza está estimado a durar no más de 5 minutos, y ofrece una
efectividad de 98%, además garantiza alcanzar y limpiar orificios y ranuras de difícil
acceso; sin mencionar su versatilidad en los elementos a limpiar, pues se pueden
exponer al ultrasonido materiales como vidrio, telas, metales, plásticos, y elementos
que van desde instrumentos quirúrgicos, hasta cartuchos de impresoras (claro está,
dependiendo de las características de potencia y frecuencia de las maquinas
empleadas en este proceso). Por esta razón muchos sectores industriales han
priorizado adelantos tecnológicos en esta área de investigación pues los resultados
mejoran en gran manera la calidad y competitividad de las diferentes compañías,
restándole importancia a los alcances de los métodos de limpieza convencionales.
La limpieza por ultrasonido está basada en el fenómeno de la cavitación, el cual ocurre
cuando se varían las presiones de un líquido en comparación a la presión atmosférica
(en este caso el agua). Dichos cambios de presión generan la creación e implosión de
burbujas de aire, las cuales a su vez, emiten una energía lo suficientemente grande
como para remover las partículas no deseadas de cualquier superficie que entre en
contacto con ellas.
20
La importancia de un trabajo de investigación como este, radica en la amplia gama de
aplicaciones útiles que se le pueden dar a fenómenos producidos por las frecuencias
ultrasónicas, y siendo más concretos, la amplia gama de aplicaciones de la cavitación
acústica. Pues se sabe que solo con producir dicho fenómeno es posible: el exterminio
de plagas, la eliminación de espumas en líquidos, la pulverización de partículas, el
secado inmediato de cualquier superficie húmeda, la reducción de celulitis y varias
aplicaciones odontológicas y quirúrgicas.
El estudio de la limpieza por cavitación acústica es de suma importancia, puesto que
acerca al ingeniero y a la ciencia, a campos de acción nuevos en donde los avances
tecnológicos pueden ayudar de manera trascendental cada proceso de una empresa;
asimismo, es necesario mencionar que dicha tecnología ya se está implementando a
nivel internacional, y la necesidad de adquirir este tipo de dispositivos irá creciendo
paulatinamente, haciendo que la presencia del ingeniero de sonido en varios de los
procesos de la industria nacional sea de carácter imperativo.

21
1 PLANTEAMIENTO DEL PROBLEMA
1.1 ANTECEDENTES
Las primeras maquinas de limpieza por ultrasonido se hicieron después de la segunda
guerra mundial, el aparato de dos cubas para piezas de relojería y el aparato de doble
cuba de funcionamiento simultáneo de 400 W, se utilizaban principalmente en la
industria relojera, con generadores que proporcionaban un centenar de vatios
eléctricos y que estaban constituidos la mayor parte por un oscilador de potencia
actuando directamente sobre el transductor.
En aquella época existía un gran número de maquinas en el mercado. Algunas
funcionaban con frecuencias elevadas, del orden de 500 Khz, fáciles de producir
mediante aparatos electrónicos sencillos y poco costosos, los transductores que se
utilizaban eran de cuarzo o de cerámicas piezoeléctricas. Este tipo de aparatos se
manipulaba para la limpieza de piezas de pequeñas dimensiones, principalmente en la
industria relojera, con generadores que proporcionaban solo un centenar de vatios
eléctricos y estaban construidos por un oscilador de potencia que actuaba
directamente sobre el transductor.
―Las maquinas que trabajaban a baja frecuencia eran cada vez más utilizadas y
proporcionaban, en general, potencias mucho mayores que se cifraban en kilovatios.
Para las frecuencias de 100 Khz, se usaban las cerámicas piezoeléctricas y para las
de 20 Khz se utilizaba la magnetostricción. El aparato clásico de magnetostricción era
en la mayor parte de las veces, un paquete de hojas de níquel puro o aleado con
hierro, excitado por un campo magnético alterno.‖1
El aparato de 200 W con regeneración del disolvente impurificado, un modelo de alta
frecuencia de un centenar de vatios renovaba continuamente el disolvente impuro
1 HEMARDINGER, Pierre. Técnicas Ultrasónicas: Generadores de Ultrasonido. Ed. Barcelona. Edición
hispano Europea.1968

22
procedente de la cuba y lo reenviaba a la parte central de esta en forma de vapor; ello
aseguraba que el enjuague de las piezas.
Luego en Estados Unidos las maquinas Branson o Detrex como la cuba de limpieza
ultrasónica de 1800 W, de emisiones cruzadas, trabajaba a baja frecuencia y
proporcionaba en general potencias mayores que se cifraban en kilovatios, para 100
Khz se usaban las cerámicas piezoeléctricas y para 20 Khz se empleaba la
magnetostricción. El aparato clásico de magnetostricción era en la mayor parte de las
veces, un paquete de hojas de níquel puro o aleado con hierro, excitado por un campo
magnético alterno.
En el mercado mundial, los constructores, que no son muchos, ofrecen un material
equipado con emisores de ultrasonidos que utilizan o bien el fenómeno de la
piezoelectricidad (transductores de cuarzo o de cerámica) o bien el fenómeno de la
magnetostricción (transductores de barras hechas de aleación de níquel o de ferita).
A comienzos de esta década existió una empresa mexicana COMSERGESA S.A. la
cual se encargaba de la construcción de sistemas como el de la limpieza ultrasónica
con tecnología Sweep Frecuency, un equipo constituido con un generador de
ultrasonido que trabaja en estado uniforme desarrollando su eficiencia en un tanque de
acero inoxidable con fondo transdurizado de 20 Khz.
Figura 1. Maquina de limpieza con ultrasonido.
Fuente:Disponible www.comsergesa.com [visitada el 20 de marzo de 2009]
Actualmente existen una diversidad de maquinas de generación de limpieza
ultrasónica las cuales se caracteriza por su variedad ya que limpia piezas que tienen
geometrías complejas y componentes muy pequeños, toda la construcción es de acero
inoxidable para la durabilidad, que trabajan en frecuencia es 25 Khz a los 40 Khz,

23
preferiblemente para piezas muy grandes, pesadas, se trabaja en el rango de
frecuencia en 25 Khz, el uso típico de las máquinas se utiliza para la limpieza de
tarjetas de circuitos impresos, en cristalería y aparatos de laboratorios.
Asimismo existe maquinas que tiene una capacidad de 15 onzas en acero inoxidable,
este tanque se contiene dentro de un plástico resistente para evitar choques cubiertos,
su utilización básica es de la limpieza de joyería tales como oro, piedras preciosas,
platino, anillos entre otros, en la óptica se utiliza para limpiar los lentes de contacto y
otros componentes ópticos. Otros usos de limpieza son las de muestras geológicas,
pequeños componentes electicos/electrónicos y metal.
En Colombia no existe ninguna empresa encargada de la elaboración y
comercialización de generadores de limpieza por ultrasonido, esto, en gran parte, por
ignorancia, asimismo por la falta de desarrollo en la manejo del ultrasonido, en los
diferentes sectores a nivel local.
En la Universidad de San Buenaventura se han realizado dos proyectos en los cuales
se ha empleado el ultrasonido, generándolo, amplificándolo, captándolo y
procesándolo. El primero realizado por Ignacio Morris Silva y Ronald Tibavisco
Salamanca, el cual trata de de un sistema de ultrasonido para manejar la broca del
café. Los investigadores se basan en la aplicación de señales que, según
investigaciones hechas por ellos, resultan molestas y hasta mortales para dicha plaga.
El trabajo hecho es, esencialmente, la realización de un barrido de frecuencias
ultrasónicas bajas, con el objetivo de lograr desprender la plaga del grano del café2. El
siguiente proyecto fue realizado por Diana Hernández Rincón, Daniel Luque Londoño
y Jorge Ardila Orduz y trata de un vehículo autónomo tipo Rover, basándose en la
medición de distancias mediante ultrasonido para que dicho aparato no se estrelle
contra obstáculos que estén por el camino3. En la facultad de tecnología en
electrónica, existe el proyecto titulado, Sistema de adquisición de datos provenientes
de un transductor de ultrasonido de alta frecuencia, elaborado por el estudiante Jaime
Mosquera. Este proyecto implementa un circuito para la generación, recepción y envío
de la señal y/o información de ultrasonido a un computador, con el fin de un posterior
2 MORRIS SILVA, Ignacio y TIBAVISCO SALAMANCA, Ronald. Desarrollo de un sistema de ultrasonido para control y manejo
de la broca del café. Bogotá D.C., 2005, 134 p. Trabajo de grado (Ing. Mecatronica). Universidad de San Buenaventura. Facultad de
Ingeniería. 3 , Diana; LUQUE LONDOÑO, Daniel y ARDILA ORDUZ, Jorge. Diseño y construcción de un vehículo autónomo tipo rover. En:
Ingenium: Revista de la facultad de Ingeniería. Año 7, No. 14 (julio-diciembre 2006); p. 38.

24
procesamiento para la identificación de líquidos tales como: Agua, leche, alcohol,
detergente y aceite de cocina4.
Debido a la creciente demanda en las distintas aplicaciones que la cavitación acústica
ha proporcionado en el mercado, es importante resaltar la existencia de varios
estudios recientes en donde por ejemplo, se profundiza sobre los efectos de la
cavitación acústica en salud humana; como el posible daño generado por la cavitación
o limpieza ultrasónica en los dientes y demás partes de la cavidad bucal a causa de
las herramientas ultrasónicas utilizadas en este proceso5; de igual manera, un estudio
muestra la utilización de la limpieza por cavitación acústica como herramienta de
limpieza quirúrgica6; también existe un estudio en donde se utiliza la cavitación
acústica como método alternativo en el suministro y dosificación de la medicina en los
pacientes que así lo requieran7.
En relación a la limpieza ultrasónica y la cavitación a escalas industriales, se están
realizando un sin número de estudios en donde es posible encontrar:
recomendaciones sobre la utilización de limpiadores ultrasónicos en la seguridad
industrial8; la limpieza de combustible de alta densidad con transductores ultrasónicos
coplanarios9; la utilización de la limpieza por cavitación acústica en soluciones
alcalinas acuosas.10 ; Y por ultimo un valioso estudio sobre como poder determinar la
limpieza generada por la cavitación acústica11.
4 MOSQUERA, Jaime. Sistema de adquisición de datos provenientes de un transductor de ultrasonido de alta frecuencia. Bogotá
D.C., 2009, 16 p. Trabajo de grado (Tecnología en electrónica). Universidad de San Buenaventura. Facultad de Ingeniería. 5 LEA, C. Simon. Cavitation damage to ultrasonic scalers. Dental Health, volume 47 pag 4. Marzo 2008 6 LU Hai-long,LIU Xiao-yun,LIAN Cui-ling,ZHAO Xu. Research and application of ultrasonic wave cleaning technique in
cleaning surgical tool. Hebei Journal of industrial science and technology, China..Mayo 2009 7 COUSSIOS C. Constanine y ROY A. Ronald. Applications of acoustics and cavitation to noninvasive theraphy and drug delivery.
Annual Review of fluid mechanics, University of Oxford . Vol 40. Enero 2008 8 8 Miguel Ángel Barceló, Rado, Jeroni Morey Salva, Los ultrasonidos: sus riesgos y normas de prevención. Mapfre seguridad N 90,
2003 9 GROSS David J. HENDON David A. high power density ultrasonic fuel cleaning whit planar transducers. United States Patent Application Publication. Enero 14 2009 10 NIEMCZEWISKI B. Cavitation intensity of solution of chemicals used as components of media for ultrasonic cleaning in
aqueous alkaline solutions. 11 PFEIFER Martin. Device and method for testing the efficiency of an ultrasonic cleaner. United States Patent . Junio 26 2002

25
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA
El procedimiento de limpieza ultrasónica por ultrasonido, consiste en hacer actuar
ondas ultrasónicas intensas sobre la superficie de objetos sumergidos dentro de un
líquido. Esta acción se basa esencialmente en el fenómeno de la cavitación acústica,
el cual consiste en la generación e implosión de burbujas de aire dentro del agua, con
tal fuerza que produce desgarramientos de las partículas no deseadas en dicho objeto
(suciedad).
A partir de la descripción anterior se formula el siguiente problema:
¿Cuál es el diseño correcto de un prototipo que logre producir el fenómeno de
limpieza por cavitación acústica?
1.3 JUSTIFICACIÓN
El ultrasonido y los fenómenos que se desprenden de él, se constituyen en un amplio
campo del conocimiento, que está generando un interés a nivel mundial, por conocer y
perfeccionar las técnicas y aplicaciones que utilizan este tipo de señales. La limpieza
por ultrasonido, es quizá, una de las técnicas más utilizadas dentro de las múltiples
aplicaciones de las frecuencias ultrasónicas, ya que brinda efectividad a un relativo
bajo costo. Sin embargo, dicha tecnología, no está siendo aplicada por la gran mayoría
de las industrias nacionales, en sus procesos de limpieza; esto, en gran parte, por
desconocimiento de esta aplicación, como también la falta de desarrollo en la
utilización del ultrasonido, en los diferentes sectores a nivel local.
Con el transcurrir de los años, la necesidad de alcanzar estándares de limpieza
elevados, es cada vez más frecuente, ya que surgen tecnologías e industrias que así
lo demandan, (como el desarrollo de microchips, lentes de contacto, inyectores de
tinta, entre otros.). De la misma forma, las exigencias de salubridad en sectores como
la medicina y afines, también necesitan de niveles de limpieza extremos y de fácil
acceso. Dadas estas razones, se espera que el requerimiento de alternativas de
limpieza altamente efectiva, crezca con el tiempo.
Seguramente, uno de los procesos industriales que más inversión requiere, y a su vez
uno de los que más contribuye a la contaminación, es la limpieza. Es muy común ver
la utilización de químicos, jabones, detergentes y demás agentes altamente

26
contaminantes, poco eficaces y sumamente costosos en dicho proceso. Es por esto
que las alternativas de limpieza (como la cavitación acústica), son una herramienta
que representa la evolución y tecnificación de las empresas, además de acercarlos a
los altos niveles de competitividad de la industria internacional.
Dadas estas razones, la alternativa de la limpieza por cavitación acústica, es bastante
razonable, pues está comprobado que con este sistema se alcanza un mayor grado en
la eliminación de residuos, menos contaminación por desechos industriales, y una
reducción de costos razonables.
De igual manera se proyecta una forma práctica para la utilización y aplicabilidad de
los conocimientos adquiridos a lo largo de la carrera; además de generar y abrir el
espacio para que a nivel institucional, el estudio del ultrasonido y sus diferentes
aplicaciones, tome un importante espacio en la investigación, y en la preparación de
futuros profesionales, contribuyendo así, en el acercamiento de la ingeniería de
sonido a las necesidades de la comunidad.
1.4 OBJETIVOS DE LA INVESTIGACIÓN
1.4.1 Objetivo General
Diseñar y construir un prototipo de cavitación acústica, con fines de limpieza en
piezas metálicas pequeñas.
1.4.2 Objetivos Específicos
Diseñar y construir circuito que permita generar la señal ultrasónica.
Diseñar y construir el circuito que permita la amplificación de la señal ultrasónica, con
la potencia requerida.
Diseñar el contenedor de líquido requerido para el proceso de limpieza por cavitación
acústica. Teniendo en cuenta características como el desagüe y la ubicación del
transductor.
Desarrollar y aplicar un método de prueba que establezca el grado de efectividad del
prototipo según el tipo de suciedad a remover.

27
1.5 ALCANCES Y LIMITACIONES DEL PROYECTO
1.5.1 Alcances.
Este proyecto, tiene como gran aporte para la limpieza industrial en la actualidad de
nuestro país, el diseño de un circuito electrónico que permita producir ultrasonido de
alta intensidad en un medio liquido, así como también la investigación y el estudio de
las ondas ultrasonoras que producen el fenómeno de la cavitación, principal
responsable de la limpieza por ultrasonido, ya que esta tecnología no se desarrolla en
Colombia solo es adquirida y aplicada.
Cabe resaltar que la cavitación acústica es el fenómeno encargado de la limpieza de
dichos elementos en este proyecto, y por lo tanto el alcance inmediato será el diseño,
construcción e implementación de cada componente electrónico, físico y/o acústico
que permita la creación de la cavitación, como también su aplicabilidad en la limpieza
de los materiales ya mencionados
1.5.2 Limitaciones.
El proyecto están dadas por la complejidad del estudio del ultrasonido debajo del
agua, ya que no se cuenta con los elementos de medición, ni los laboratorios
necesarios para dicho fin; es por esta razón que no es posible profundizar en dichos
fenómenos, más que las referencias teóricas y las practicas realizadas. Otra limitación
clara de este proyecto tiene que ver con el transductor, ya que debido a sus
características es necesaria su importación, además de condicionar todo el diseño
electrónico, y del contenedor.

28
2 MARCO DE REFERENCIA
2.1 MARCO TEÓRICO-CONCEPTUAL
2.1.1 Ultrasonido.
Es importante tener en cuenta que el ultrasonido tiene como procedencia el mar,
puesto que los seres vivos y la naturaleza en la superficie terrestre en general, lo
utilizan muy poco, ya que recurren a sus otros sentidos para sus diferentes tareas
(incluido el humano); sin embargo debido a la versatilidad del sonido, se puede
evidenciar su utilización en la localización de diferentes objetos y/o animales en
grandes distancias y ecosistemas con poca visibilidad, lo cual no es posible por los
otros sentidos (esto se presenta en el ultrasonido e infrasonido). Es por esto que los
diferentes animales en los ecosistemas acuáticos, han utilizado al ultrasonido por
millones de años en tareas de localización de alimentos y convivencia con sus
similares.
El ultrasonido gesto su desarrollo después del hundimiento del Titanic y el ambiente
guerrerista en Europa, ya que la necesidad de localizar y visualizar objetos peligrosos
debajo del agua era gigantesca. Y es en esta etapa de la historia en donde la
investigación trajo a la luz las aplicaciones diferentes e innovadoras, que el ultrasonido
podía brindar a la humanidad.
Figura 2. Aplicaciones del ultrasonido según su frecuencia
Fuente: fundamentals and applications of ultrasonic waves. Pg. 16.

29
Concretamente, se le llama ultrasonido a las variaciones de presión en un medio, con
frecuencias superiores al rango audible del ser humano. Varios autores catalogan al
ultrasonido en las frecuencias superiores a los 20KHz; sin embargo, se puede decir
que el ultrasonido comienza a partir del final del rango audible del ser humano.
Entonces se hablaría que el fenómeno ultra sonoro inicia a partir de frecuencias
cercanas a los 18KHz.
Figura. 3 Escala de frecuencias acústicas
Fuente: Autores
El ser humano es capaz de apreciar solo un poco todo el panorama acústico que lo
rodea, pero esto no significa que las frecuencias no audibles tengan propiedades
distintas a las del rango de escucha; por el contrario, estas frecuencias ultrasónicas
también son regidas por los principios básicos y leyes acústicas como el de la
propagación.12
El ultrasonido es objeto de estudio en diferentes campos debido a la amplia gama de
aplicaciones que ofrece, es bastante común ver dispositivos ultrasónicos en la
medicina, la oceanografía, la sismología además de industrias como la alimenticia,
militar, textil, y metalmecánica. Al mismo tiempo es objeto de estudio de disciplinas
como la física, química, biología, zoología y diferentes ingenierías.
Este gran desempeño multidisciplinario es causado por dos características esenciales
del ultrasonido:
12
Fundamentals and applications of ultrasonic waves. Pg. 16

30
1. Las ondas ultrasónicas son relativamente lentas pues viajan 100,000 veces
más lento que las ondas electromagnéticas, permitiendo así, un fácil análisis de
los datos o fenómenos causados.13
2. Las ondas ultrasónicas son capaces de penetrar en objetos opacos, cosa que
otros tipos de radiación como la luz no son capaces de hacer, y en
comparación con otros tipos de tecnología, el ultrasonido en más económico,
versátil y fácil de manipular.14
Existen algunos claros ejemplos de utilización del ultrasonido en la naturaleza, y
algunos de ellos han sido desarrollados y emulados tecnológicamente con diferentes
tipos de aplicaciones. Los murciélagos son, por ejemplo, uno de los seres que mejor
utilizan al ultrasonido y su alta reflectividad como herramienta en la eco localización.
Este fenómeno en particular tuvo mucho que aportar a lo que hoy conocemos como
radar.
Las ballenas y los delfines también son conocidos por la utilización de frecuencias
ultrasónicas para poder hallar alimento, los delfines son capaces de detectar pequeños
peces debajo del la tierra submarina, emitiendo frecuencias ultrasónicas, las cuales a
su vez son recibidas por unos sensores que le brindan al delfín una imagen
tridimensional de los objetos y que hay dentro del lodo además de la profundidad y
demás datos necesarios para su casería. Un ejemplo bastante interesante sobre la
adaptabilidad de impedancias en la naturaleza es la foca, puesto que tiene dos pares
de sistemas de receptividad acústica, uno centrado en 12KHz (para uso en la
superficie), y otro centrado en los 60KHz (para uso submarino). Este segundo sistema
esta sincronizado con las frecuencias emitidas por sus depredadores.15
El colapso de burbujas es una fuente generadora de frecuencias ultrasónicas, se han
revelado estudios en donde la vivía en un lago produce frecuencias de 100KHz, con
amplitudes pico en 140KHz. Es por esto que el océano, es sin duda el generador de
frecuencias ultrasónicas mas importante en la tierra, ya que la cantidad de burbujas
que colapsan en el, producen un sinfín de frecuencias no audibles para el ser
humano.16
13
ULTRASONICS. Edited by Edmons; Editorial academic Press 1981. Pg 341 14
J.David N. Cheeke Fundamental and applications of ultrasonic waves, CRG Press 2002 Pg. 17 15
A history of ultrasonic’s, in Physical Acoustics, XV, Mason, and W.P. chapter 1 16
Minnaert, M. The Nature of Light and Color in the Open Air Dover Publications, New York, 1954

31
Figura 4. Rango audible de algunos animales en la naturaleza.
Fuente: Sales, G.y PYE, D. Ultrasonic Communication by Animals Londres: Chapman
and Hall, 1974
A pesar de que las frecuencias ultrasónicas en la naturaleza son algo cotidiano, el
estudio del ultrasonido comienza a ser desarrollado a comienzos del siglo pasado. El
primer detonante en el estudio de esta nueva disciplina, se debe al hallazgo de la
piezoelectricidad y la manera de realizar cambios de energía eléctrica a energía
mecánica y viceversa, este descubrimiento fue realizado por los hermanos Curie en
1880.
A finales del siglo 19, se descubren las ondas acústicas de superficie SAW (por sus
siglas en ingles) por Lord Raylegh en donde a su vez, se habla por primera vez de la
atomización, la presión acústica, lo efectos no lineales y el colapso de burbujas17
Entre 1919 el alemán Langevin (padre del ultrasonido) descubre y desarrolla el pulso
de eco centrado a 150KHz, lo cual permitía sosegar un poco la necesidad de saber y
17
Lord Rayleght (John W. Strutt) the theory of sound .Vol 1 y 2, Dober Publicatios, New York 1968.

32
localizar objetos submarinos no visibles (necesidad acrecentada por el hundimiento del
Titanic). De ahí en adelante hasta la década de 1940, el ultrasonido fue objeto de
desarrollo e investigación.18
Después de los años de post-guerra hasta hoy en día, el desarrollo de tecnologías
ultrasónicas ha ido en aumento trayendo alcances tecnológicos que permiten entender
y estudiar más a fondo el ultrasonido y sus beneficios para la humanidad. Entre los
más notables avances científicos encontramos:
Nuevos materiales de transducción y la utilización de cerámicas para el mismo
fin.
Transductores de cuerno, en donde hay una concentración de energía por la
forma de cono que presenta. Esta tecnología es utilizada para corte de
diferentes materiales.
Desarrollo de dinámica de burbujas.
Limpieza ultrasónica.
Soladura y fundición
Emulsificación, en donde las partículas de tinta o pintura son removidas de
cosméticos, betún para zapatos y demás parafinas.
Fundición por desgasificación en la metalurgia.
Imaging, con fines médicos.
El ultrasonido es bastante utilizado en la actualidad, y es debido al reciente auge de
descubrimientos en las aplicaciones de estas frecuencias, que estudios con relación a
los efectos nocivos en la salud, también han sido publicados.
Existen tres tipos de riesgos relacionados con el manejo de frecuencias ultrasónicas
los cuales son:
Riesgos debidos a la exposición por contacto directo
Riesgos debidos a la exposición indirecta por vía aérea
Riesgos debidos a las operaciones realizadas con ultrasonidos en el
laboratorio.
Los riesgos debidos a la exposición por contacto directo, están directamente
relacionados con el efecto de la cavitación acústica (del cual profundizaremos más
adelante). Este fenómeno sonoquímico, es responsable de la ruptura de diferentes
18
.David N. Cheeke Fundamental and applications of ultrasonic waves, CRG Press 2002 Pg. 25.

33
tipos de moléculas como el agua, o la grasa debido a los cambios de presión inducidos
por el transductor.
El efecto de la cavitación ultrasónica es bastante utilizado por la industria de la belleza
con fines de reducción de talla, celulitis y en general de todo tipo de grasa que sea
expuesto a dichas frecuencias (100KHz-10MHz), en donde dichas moléculas de grasa
se hacen estallar. No obstante, dicho efecto puede ser contraproducente si se aplica
en tiempos prolongados y con amplitudes de gran magnitud; en el peor de los casos,
llegando a quemar la parte del tejido expuesta al ultrasonido o incluso a destruir y
descalcificar el tejido óseo.19
Cuando hablamos de exposición indirecta, nos referimos a que hay una interacción
con un medio elástico para poder propagarse como el aire, el agua, el acero etc. (solo
el vacio es un medio no elástico, razón por la cual el sonido no puede propagarse a
través de este.). Debido a la pequeña longitud de onda que presenta cualquier onda
ultrasónica, este tipo de irradiación sonora es propensa a ser absorbida por casi
cualquier elemento al cual sea expuesta. Es por esto que el mayor riesgo de
exposición a frecuencias ultrasónicas lo representa el aire.
Aunque las frecuencias ultrasónicas no son percibidas por el aparto auditivo del ser
humano, las pequeñas vellosidades en el pabellón auditivo pueden recibir las
vibraciones y moverse con ellas, generando así un medio de transducción con
frecuencias que si pueden ser recibidas por el oído, y que según las aplicaciones
sonoquímicas, pueden tener amplitudes peligrosas para la salud.
19
Universidad de Cardiff, Sheridan Morgan, 2010, la radiación ultrasónica, Pg. 6

34
Figura 5. Efectos fisiológicos producidos por la exposición a ultrasonidos por vía aérea
Fuente: Miguel Ángel Barceló, Los ultrasonidos: sus riesgos y normas de prevención.
Mapfre seguridad N 90, 2003 Pg.16
Las frecuencias sub armónicas generadas por algunos transductores y aplicaciones
del ultrasonido, son causantes de algunas molestias asociadas a la radiación
ultrasónica y dependen del grado de susceptibilidad individual de la persona expuesta.
Entre dichos síntomas se encuentran: nauseas, dolor de cabeza, mareos y fatiga.
Los riesgos asociados por las operaciones realizadas con ultrasonidos en laboratorios
están enfocados a las emisiones de gases, vapores ó aerosoles nocivos por su
naturaleza toxica, irritante, o corrosiva. Debido a los diferentes tipos de suciedad
expuestos en un baño ultrasónico (en el proceso de limpieza), ya sea en el agua ó en
los objetos dentro de ella, y los diferentes solventes y químicos que pueden haber en

35
el medio (rinces, desengrasantes y detergentes); y la acción explosiva de la cavitación.
La emanación de gases será algo consecuente a esta aplicación.20
2.1.2 Transductores de ultrasonido.
En el apartado anterior se expone la teoría fundamental del ultrasonido, ahora
corresponde mostrar la forma de poder generar ultrasonidos. Se presentara base
teórica del transductor empleado para el desarrollo del presente proyecto, haciendo
referencia también a otros tipos de transductores ultrasónicos.
Se ha visto que es imposible el desarrollo de osciladores mecánicos que funcionen a
frecuencias extremadamente altas. Es, por tanto, necesario encontrar un medio
alternativo de generación de ultrasonidos. La forma mas común de conseguir esto
actualmente consiste en la generación de oscilaciones eléctricas de frecuencia
requerida y su posterior conversión en oscilaciones mecánicas. De esta forma es
posible definir la frecuencia con bastante precisión. Además, el empleo de oscilaciones
eléctricas, que es necesario para la generación de ultrasonido de muy alta frecuencia,
es también conveniente en la práctica para la generación de ultrasonidos de
frecuencias menores. Los componentes activos que interconvierten las oscilaciones
eléctricas y ultrasónicas reciben el nombre de transductores. La manera mas normal,
con mucho, de llevar a cabo las conversiones electromagnéticas para la generación y
detención del ultrasonido, consiste en el empleo de la propiedad conocida como
piezoelectricidad.
Se supone que una rodaja de un cristal eléctricamente aislante, se comprime
aplicando fuerzas en sus superficies. Debido a estas fuerzas el cristal se deformara
ligeramente y si la simetría de la estructura interna del cristal cumple determinadas
condiciones, pueden aparecer cargas eléctricas sobre el cristal (figura), positiva en una
superficie y negativa en la opuesta. En el interior del cristal se crea un campo de
potencia electrostático. Si se eliminan las fuerzas externas, las cargas desaparecen.
Un cristal que muestre este fenómeno recibe el nombre de piezoeléctrico.
20
Miguel Ángel Barceló, Los ultrasonidos: sus riesgos y normas de prevención. Mapfre seguridad N 90, 2003 Pg.16

36
Figura 6. Diagrama de polarización
Fuente: A.P. Cracknell, Ultrasonidos. Madrid: Paraninfo, 1983. 67p.
El fenómeno contrario del efecto piezoeléctrico supondrá que, al colocar un cristal
piezoeléctrico en un campo eléctrico, el cristal adquirirá cierta distorsión; Si se elimina
el campo eléctrico, la distorsión desaparecerá. Una manera conveniente de producir el
campo eléctrico consiste en recubrir las superficies de la placa con una película
conductora y aplicar un voltaje entre estos recubrimientos metálicos.
La existencia de la propiedad piezoeléctrica depende de la disposición interna de los
átomos en el cristal. Hay muchos cristales que, al ser sometidos a una tensión
experimenta distorsiones en las que las cargas positivas y negativas tratan
necesariamente de disponerse así mismas, a causa de la simetría del cristal, de
manera que no aparece ningún momento dipolar en el espécimen.
La importancia de los efectos piezoeléctricos y su inverso reside en la relación con los
ultrasonidos que proporcionan un medio de conversión de las oscilaciones eléctricas
en oscilaciones mecánicas y viceversa, mediante el empleo de transductores
piezoeléctricos. Se supone que los electrodos se fijen a la superficie de una lámina
rectangular de cuarzo ―cortada según x‖. Los electrodos pueden adherirse o
depositarse mediante el vacio sobre las caras del transductor. Si se aplica a estos

37
electrodos un voltaje oscilante de frecuencia v, se producen oscilaciones mecánicas
de amplitud bastante pequeña. Estas oscilaciones tendrán componentes según las
direcciones x, e, y, pero no según la dirección z.
Para trabajar con una frecuencia constante, la frecuencia de operación debe elegirse
entre una de las frecuencias naturales de resonancia del cristal. Por debajo de unos
100MHz. Se debería excitar por lo general, la frecuencia fundamental de la placa de
cuarzo y se deberá elegir consecuentemente sus dimensiones (ver Tabla).
Tabla 1. Dimensiones de los transductores de cuarzo y de sus frecuencias de
resonancia.
FRECUENCIA
ESPESOR DEL
TRANSDUCTOR
LONGITUDES DE ONDA
CORRESPONDIENTE
ACERO AGUA AIRE CORTE
X
CORTE
Y
ONDAS DE
VOLUMEN
ONDAS DE
CORTADURA
1 2.88 1.92 6 3 1.15 0.3
10 0.288 0.192 0.6 0.3 0.15 0.03
VELOCIDADES CORRESPONDIENTES
5760 3750 5900 3200 1500 331
Fuente: A.P. Cracknell, Ultrasonidos. Madrid: Paraninfo, 1983. 72p.
Existen muchos otros materiales piezoeléctricos además del cuarzo. Dos que se
emplean normalmente en los transductores son el titaniato de bario y el niobato de
plomo. Estos dos materiales son ferroelectricos además de piezoeléctricos. Es decir,
están polarizados espontáneamente y una deformación mecánica provoca un cambio
en esta polarización. Ni el titaniato de bario, ni el niobato de plomo pueden obtenerse
como cristales puros de gran tamaño y de esta manera el material transductor se
prepara como una cerámica, pulverizado con los cristales disponibles con

38
aglomeradores y sintetizadores por encima de 1000°C y bajo presión, para obtener
una cerámica. Los diminutos cristales se alinean a continuación enfriando el material
por debajo de su temperatura de transmisión ferroelectrica, mientras se le aplica un
campo electrónico; la razón para la elección de materiales que no son solo
piezoeléctricos sino también ferroelectricos tiene como fin posibilitar el empleo de este
método de alineación.21
2.1.3 Inversores modulados por ancho de pulso.
Los convertidores de CD a CA se llaman inversores. La función de un inversor es
cambiar un voltaje de entrada de CD a un voltaje simétrico de salida de CA, con la
magnitud y la frecuencia deseada. El voltaje de salida puede ser fijo o variable, a una
frecuencia fija o variable. Un voltaje variable de salida se puede obtener haciendo
variar el voltaje de entrada de CD, manteniendo constante la ganancia del inversor.
Por otro lado, si el voltaje de CD de entrada es fijo y no es controlable, se puede
obtener un voltaje variable de salida haciendo variar la ganancia del inversor, lo que se
consigue normalmente con control por modulación por ancho de pulso (PWM, pulse-
witdh-modulation) dentro del inversor. La ganancia del inversor se puede definir como
la relación entre el voltaje de salida de CA y el voltaje de entrada de CD.
Las formas de onda del voltaje de salida ideales deberían ser sinusoidales. Sin
embargo, las de los inversores prácticos no son sinusoidales y contienen ciertos
armónicos. En aplicaciones de potencia baja e intermedia se pueden aceptar voltajes
de onda cuadrada o de onda casi cuadrada, y para aplicaciones con alta potencia se
requieren formas de onda sinusoidal con poca distorsión. Con la disponibilidad de los
dispositivos semiconductores de potencia de alta velocidad, se pueden minimizar los
contenidos de armónicos del voltaje de salida, o al menos reducirlos en forma
importante, mediante técnicas de conmutación.
Los inversores se pueden clasificar en el sentido amplio de dos tipos: 1) Inversores
monofásicos y 2) Inversores trifásicos. Cada uno puede usar dispositivos controlados
de encendido y apagado (como transistores bipolares de unión [BJT], transistores de
efecto de campo, de metal oxido semiconductor [MOSFET], transistores bipolares de
compuerta aislada [IGBT], tiristores controlados por compuertas [GTO] ). Estos
inversores usan en general señales de control por modulación por ancho de pulso
21
A.p. Cracknell, Ultrasonidos. Madrid: Paraninfo, 1983. 67-72p.

39
(PWM) para producir un voltaje de salida de CA. Un inversor se llama inversor
alimentado por voltaje (VFI, de voltaje-fet-inverter) si el voltaje de entrada permanece
constante; Inversor alimentado por corriente (CFI, currente-fet-inverter) si la corriente
de entrada se mantiene constante, y convertidor enlazado con CD variable si el voltaje
de entrada es controlable. Si se hacen pasar el voltaje o la corriente de salida del
inversor por cero, creando un circuito resonante LC a esta clase de inversor se le
llama inversor de pulso resonante y tiene muchas aplicaciones en la electrónica de
potencia.22
2.1.3.1 Principio de operación.
El principio de los inversores monofásicos se puede explicar con la figura a. El circuito
del inversor consiste en dos pulsadores. Cuando solo se enciende el transistor Q1,
durante el tiempo T0/2, el voltaje instantáneo V0, a través de la carga es Vs/2. Si el
transistor Q2 se enciende durante un tiempo T0/2, aparece - Vs/2 a través de la carga.
El circuito lógico se debe diseñar de tal modo que si Q1 y Q2 no estén activos al
mismo tiempo. La figura b muestra la forma de onda del voltaje de salida y las
corrientes en el transistor, con una carga resistiva. Este inversor requiere una fuente
de CD de 3 hilos, y cuando un transistor este apagado, su voltaje inverso es Vs en
lugar de Vs/2 a este tipo de inversor se le llama inversor de medio puente.23
Figura 7. Circuito inversor de medio puente.
22
Muhammand H. Rashid. Electrónica de potencia circuitos, dispositivos y aplicaciones. México: Tercera
edición, 2004.228p. 23
Muhammand H. Rashid. Electrónica de potencia circuitos, dispositivos y aplicaciones. México: Tercera
edición, 2004.228p.

40
Fuente: Muhammad H. Rashid. Electrónica de potencia circuitos, dispositivos y
aplicaciones. México: Tercera edición, 2004. 228p.
Figura 8. Forma de onda de carga resistiva.
Fuente: Muhammad H. Rashid. Electrónica de potencia circuitos, dispositivos y
aplicaciones. México: Tercera edición, 2004. 228p.
2.1.4 Cavitación Acústica.
Podemos definir la cavitación como la formación de uno o más compartimientos de
gas (ó cavidades) en un líquido. De aquí, la palabra cavitación se refiere, en sentido
general, tanto a la creación de una nueva cavidad como también a la expansión de las
cavidades preexistentes a unos tamaños que puedan ser observados
macroscópicamente. El contenido de las cavidades está determinado por el vapor del
líquido, o sus combinaciones. Algunas veces estas cavidades se denominan burbujas.
Usualmente, la cavitación ocurre en respuesta a la reducción de la presión, lo
suficiente para quedar por debajo de la presión del vapor del líquido, ó a la elevación
de la temperatura por encima del punto de ebullición, inducida por medios químicos,
eléctricos ó mecánicos.
41
Existen algunas características e información que son bastante importantes para
conocer con más profundidad el fenómeno de la cavitación:
1. La cavitación es un fenómeno de líquidos y no ocurre en los sólidos ó gases
bajo ninguna circunstancia.24
2. La cavitación es el resultado de reducciones de presión en un líquido el cual,
presumiblemente puede ser controlado, controlando la cantidad de la
reducción. Si la presión se reduce y se mantiene lo suficiente, teniendo en
cuenta las características físicas y la condiciones del líquido, esto producirá
cavitación.
3. La cavitación es un fenómeno dinámico, y es concerniente a la creación,
crecimiento y colapso de las cavidades.
4. No hay indicaciones de si el liquido esta en movimiento ó en reposo. Esto
puede indicar que la cavitación ocurre en ambos casos.25
5. No hay referencias que indiquen que la cavitación ocurra con líquidos
restringidos en contenedores, o sin ellos. Parece ser que ocurre en ambos
casos.26
Existen cuatro tipos de cavitación:27
I. Cavitación en movimiento
II. Cavitación fija
III. Cavitación en un eje
IV. Cavitación vibratoria
En nuestra investigación nos centraremos en la cavitación vibratoria (vibratory
cavitation). En este tipo de cavitación, las fuerzas que causan la formación y el colapso
de las cavidades, están determinadas por series continuas de alta amplitud ó
pulsaciones de presión de alta frecuencia en un líquido. Estas pulsaciones de presión
son generadas por una superficie sumergible, la cual vibra, generando ondas de
presión en el liquido. Las cavidades no se formaran mientras la amplitud de la
24
Felipe Dario Gaitan, An experimental investigation of acoustic cavitation in gaseous liquids ,Editorial
Ann Arbor: University Microfilms International 1990. Capitulo1 25
Ibid Pg .3 26
Ibid Pg. 4 27
Ibid Pg. 6

42
variación de la presión es suficientemente grande para hacer que la presión del vapor
del líquido sea menor. Un claro ejemplo de esto es la cavitación acústica.
Figura 9. Formación de cavitación por efectos del ultrasonido.
Fuente: Miguel Ángel Barceló, Rado, Jeroni Morey Salva, Los ultrasonidos: sus riesgos
y normas de prevención. Mapfre seguridad N 90, 2003 Pg. 13
La forma de la superficie vibratoria determinara que tipo de frente de onda será
producido, plano, difuso ó concentrado. Si el frente de onda es plano ó difuso, las
amplitudes máximas y mínimas, ocurrirán en las superficies vibratorias, si el frente de
onda es concentrado, ó focalizado, el punto de amplitud máximo será el foco entre el
líquido y el cuerpo. Un transductor acústico, en el agua, generalmente produce frente
de onda ligeramente difusa.
Supongamos que un liquido a través del cual se propagan ondas ultrasonoras, existe
una burbuja de radio r. la burbuja puede estar constituida o de vapor del mismo liquido
o de algún gas que este contiene en la disolución. La burbuja estará sujeta a los
cambios de presión asociados al ultrasonido, y por ello la burbuja se contraerá y

43
expandirá conforme al exceso de presión aumenta y disminuye en la mitad del semi-
ciclo de descompresión, la burbuja tiene el radio máximo r max.
Figura 10. Compresión y rarefacción de una onda ultrasónica.
Fuente: Disponible en www.totalmediks.com [consultada el 30 de marzo de 2010].
Se puede demostrar que si la amplitud del exceso de presión de ultrasonido es
suficientemente elevada, o en otras palabras, si la intensidad del ultrasonido es
suficientemente alta y el radio inicial de la burbuja tiene un valor inferior a un cierto
valor critico , la burbuja sufrirá un colapso repentino durante el semi ciclo de
compresión con la liberación, también repentina, de una cantidad de energía
comparativamente grande. Este colapso y la liberación de energía asociada recibe el
nombre de cavitación. El radio critico r0, viene dado por
Donde

44
La cantidad de energía liberada en la cavitación depende de la relación r max/r0. Si se
aumenta la intensidad del ultrasonido, la amplitud de las oscilaciones del exceso de
presión también aumentará y a la vez lo hará la relación r max/r0 y la energía cedida
en el colapso por cada burbuja. Si se considera la cavitación en varios líquidos
distintos, la energía cedida será mayor para los valores mayores de tensiones
superficiales sobre la superficie de la burbuja y para los valores más pequeños para la
presión de vapor. De esta manera, el agua, que tiene una elevada tensión superficial,
tendrá una energía cavitacional grande. La energía de cavitación puede aumentarse
aun mas añadiendo algo de alcohol, digamos que un 10%. Esto aumenta la presión de
vapor, lo que incrementa la energía cavitacional, aunque este efecto es anulado
parcial, aunque no completamente por la correspondiente tensión superficial.
La presión en la burbuja, momentos antes de su colapso, puede desde luego, ser muy
grande. Así, cuando la burbuja se colapsa finalmente, se produce una onda de choque
poderosa y la energía de esta onda de choque es la responsable de casi todos los
efectos que provoca la cavitación. Por ejemplo, una pieza metálica inmersa en un
líquido en el que tiene lugar la cavitación puede resultar seriamente erosionada u
horadada; este desgaste recibe el nombre de desgaste por cavitación.28 El empleo del
término cavitación ha cambiado; en un principio significaba lo que hoy se denomina
erosión por cavitación, mientras que en nuestros días el término se emplea para hacer
referencia al colapso de las burbujas y su liberación de energía.
Aunque la presencia de burbujas producidas por la liberación de un gas disuelto facilita
la cavitación, esta puede ocurrir también en los líquidos libres de gases si la presión en
exceso del ultrasonido supera la presión hidrostática en el líquido. En algún momento
del semi-ciclo de descompresión, presión total podría llegar a la negativa, y
para evitar que suceda esto se forman burbujas en el líquido. Para un líquido dado y
para una frecuencia ultrasónica dada, existirá una intensidad ultrasónica mínima
necesaria para producir la cavitación. Esta intensidad umbral varía con la frecuencia.
La cavitación tiene un efecto corrosivo en las superficies que son expuestas al violento
colapso de las burbujas; existen referencias bibliográficas donde se hablan de
28
Ultrasonics , Edited by Peter D. Edmons; Editorial Academic Press 1981 Pg 358.

45
20.000psi por cada burbuja, dato que es bastante claro sobre las fuerzas ejercidas por
este fenómeno, y más si tenemos en cuenta, que son millones de burbujas ejerciendo
dicha presión. Los efectos corrosivos de la cavitación son bastante comunes en
represas, barcos, válvulas de motores y demás objetos o materiales expuestos al
colapso de burbujas.
Figura 11. Efectos de la cavitación sobre una pieza de motor.
Fuente: Disponible en
www.interempresas.net/Componentes_Mecanicos/Articulos/34521-Cavitacion-en-el-
bombeo-de-fluidos. [Consultada el 30 de septiembre de 2010].
Como ya lo hemos dicho antes, los efectos de la cavitación serán más contundentes si
esta tiene parte en líquidos o sustancias químicas que sean volátiles, o tengan una
tensión superficial grande. A continuación se mostrara una tabla en donde se muestra
el efecto de la cavitación en diferentes materiales con diferentes líquidos
Tabla 2. Efecto de la cavitación en diferentes materiales y líquidos.
302
ac
ero
in
oxid
ab
le
Alu
min
io
Tit
an
io
Bro
nce
Lató
n
Fib
ra d
e c
arb
ón
Tefl
ón
Ny
lon
Po
lie
tile
no
Ce
rám
ica
Pv
c
Sil
ico
na
Ne
op
ren
o
Ca
uc
ho
Café A A D B D C A A A A A D A A
Acido Cítrico A C A D C
A A B B A C A A

46
Sulfato de
Magnesio B A A A D C A B A B A A A C
Etanol A A C A D D A A D C B B B D
Gasolina A A B C A C A D A B B C D D
Keroseno A A A A A A A A A A B D D D
Agua A A A D C D A D A A A A B A
Alcohol A B A A C A A A B A A B C B
A: ningún efecto, aceptable
B: efecto menor, aceptable
C: efecto moderado, cuestionable
D: efecto severo, no recomendable
Fuente: Disponible en http://www.megasonics.com/chemical.html
[Consultado el 20 de febrero de 2010]
Sin embargo, en la actualidad existen algunas aplicaciones dadas por la cavitación
que no representan ningún peligro considerable. Entre ellas se encuentran las terapias
de cavitación en la industria de la belleza, las cuales ejercen la fuerza cavitatoria sobre
las moléculas de grasa que se encuentran debajo de la piel. Esa novedosa técnica no
es recomendable durante periodos largos de tiempo debido a los efectos segundarios
que pueda presentar el paciente (quemaduras, descalcificación y destrucción de
tejidos).
Otra aplicación, es el motivo de este trabajo de grado, la limpieza ultrasónica, en
donde la energía ultrasónica ejerce la presión necesaria para la ruptura de las
partículas del agua, creando burbujas de agua, las cuales a su vez implotarán creando
una onda de choque con efectos de limpieza en lo elementos circundantes.
2.1.5 Comportamiento de la acústica sub acuática del sonido.
La acústica subacuática es la ciencia que estudia el comportamiento del sonido en el
agua y es una de las responsables en desarrollar sistemas que solucionen nuevas
necesidades y vayan a la par del creciente aumento tecnológico, además esta
encargada de investigar, prevenir y regular los efectos secundarios que conlleva el uso
del agua como canal de información.

47
2.1.5.1 Ondas acústicas.
―Las ondas acústicas son generadas por la propagación de una perturbación
mecánica. Las dilataciones y las compresiones son transmitidas de un puto a otro a
grandes distancias de la fuente debido a las propiedades de elasticidad del medio‖29.
Estas ondas requieren de un medio elástico para ser propagadas como el sólido, gas o
líquido, siendo este ultimo un buen conductor para este tipo de ondas al generar
perdidas menores de energía en su propagación.
La presión acústica p para una onda plana se relaciona con la velocidad de la partícula
del fluido u por medio de la ecuación (1).
p=ρcu (1) 30
Donde ρ la densidad del medio y c la velocidad de propagación del sonido. El factor de
proporcionalidad ρc es llamado impedancia acústica específica que para el agua del
mar es: ρc = 1,5 x 10^5 g/ ) s y para el agua dulce es: 1,47 x 10^5 g/ ) s.
La intensidad instantánea I para una onda plana se relaciona con presión acústica
instantánea por:
I =
(Watts/ ) (2)31
La frecuencia es la cantidad de oscilaciones que ejecutan un sistema por segundo
esta dado por la siguiente ecuación:
(3) 32
La longitud de onda es la distancia que recorre una onda durante un periodo de la
señal con velocidad c:
ג
(4) 33
19
LURTON. Op. Cit., p.12 20
URICK. Op. Cit., p.11 21
Ibíd. , p.13 22
Ibíd., p.13 33
Ibíd., p. 14

48
Para una velocidad del sonido c de 1500m/s, las longitudes de onda en la acústica
subacuática serán de 150m a 10Hz, 1.5m a 1KHz y 0.0015m a 1MHz.
Para la conversión de pascales a decibeles, la presión sonora p esta definida en
términos de nivel de presión sonora SPL:
SPL = 20* log (5)34
Donde p es la presión acústica en pascales (Pa), es la presión de referencia
en Pa. Para el caso del agua este tiene un valor de 1 Pa.
2.1.5.2 Tipos de ondas.
Una onda plana es aquella que mantiene constante la amplitud y la fase de sus
variables acústicas sobre un plano perpendicular a la dirección de propagación.
Lejos de la fuente, las propiedades de una onda divergente (esférica, cilíndrica)
son similares a las de una onda plana.
La característica principal de una onda esférica es que distribuye la energía
emitida por su fuente en una esfera que incrementa su radio a medida que se
aleja, por lo tanto y tomando en cuenta solo la dispersión geométrica, la
amplitud de la onda disminuirá con el inverso cuadrado de la distancia a la
fuente.
Una onda cilíndrica es generada por una línea de fuentes, se caracteriza por
tener una dispersión geométrica en dos dimensiones a diferencia de la esférica
que lo hace en tres dimensiones. La amplitud de una onda cilíndrica disminuirá
con el inverso de la raíz cuadrada de la distancia a la fuente. En acústica
subacuática son comunes este tipo de ondas debido a los arreglos de
transductores hechos para ser utilizados como SONAR.
2.1.5.3 Fenómeno de refracción.
El fenómeno de refracción se describe como la variación de la dirección de
propagación de onda viajando en un medio con velocidad determinada al incluir en
34
ROBBER, Robert J. Underwater Electroacoustics Measurements. Los altos: Peninsula
Publishing, June 1990. p.9

49
otro medio con características físicas que resulten en una velocidad de propagación
del sonido distinta. ―La variación de la dirección de la onda incidente esta dada por el
índice de refracción, el cual esta relacionado a las velocidades de la propagación de
los dos medios y al Angulo de incidencia‖35. En el mar la temperatura y la presión
hidrostática varían notablemente con la profundidad resultando en una variación de la
velocidad del sonido, y con esto provocando una curva de la onda. En acústica
subacuática la refracción es un fenómeno con consecuencias importantes, ya que se
genera variaciones considerables en la dirección de propagación de la señal emitida.
El fenómeno de reflexión se da cuando una onda incide en una superficie con
características físicas distintas al medio inicial de propagación, puede ser transmitida
al segundo medio o puede ser reflejada. La reflexión es generada debido al cambio de
impedancia del medio.
El fenómeno de difracción básicamente explica el comportamiento de un frente de
onda al interactuar con el elemento que no podría considerarse como infinito, esto es,
sus dimensiones son pequeñas en comparación a la longitud de onda de la vibración
incidente. Según Huygens36 , el frente de onda esta compuesto por fuentes puntuales
radiando con las mismas características de la señal original, debido a esto cuando una
onda choca con un objeto, en los límites de este, las fuentes secundarias regeneran el
frente de onda y lo hacen esféricamente debido a la característica omnidireccional de
las fuentes puntuales.
El fenómeno de interferencia sucede cuando dos ondas viajan en el mismo medio se
encuentran y se combinan, generando incremento o diminución de la amplitud
dependiendo de si la interferencia es constructiva o destructiva. Por interferencia
constructiva se entiende que, las ondas combinadas lo hacen en fase produciendo con
esto un incremento en la amplitud. En la interferencia destructiva por lo contrario, las
ondas involucradas están fuera de fase, resultando en una onda con menor amplitud
que las ondas independientes. Este análisis se ha tomado a grandes rasgos, ya que
no solo existen estos dos valores de relación de fase sino que existen infinitas
combinaciones entre estos dos valores límite. Para Urick37 cuando la superficie no es
35
M.&WOLF, BORN, E., WOLF, E. Principles of Optics: Electromagnetic Theory of Propagation,
Interference and Diffraction of Light. 7ed, Cambridge: Cambridge University Pr. 1999. 36
Ibíd., p. 17 37
URICK. Op. Cit., p.131

50
tan rígida, se crea un patrón de interferencia en el campo sonoro subacuático. Este
patrón es causado por la interferencia destructiva y constructiva entre el sonido directo
y el sonido reflejado por la superficie y es llamado el efecto del espejo de Lloyd o
imagen de interferencia, observado en la figura siguiente:
Figura 12. Patrón de interferencia en R entre el sonido originado por la fuente S y la
imagen de la superficie S’.
Fuente: URICK, Robert J. ―Principales of underwater sound ―3er Edition. Península
Publishing. Los altos, California. 1983. p. 131
Urick 38 explica este patrón en función de la presiones por unidad de distancia, por.
Donde es la presión generada por la fuente. Que para el receptor se convierte en:
Donde es la distancia de la fuente al receptor. Así la presión de onda reflejada por
las fronteras esta dad por:
38
Ibíd., p.131

51
Donde es la distancia recorrida entre la fuente y el receptor luego de una reflexión
de una de las superficies. T es la diferencia de tiempo de llagada entre y .
Entonces el patrón de interferencia esta dado por:
(6)
Esta expresión relaciona matemáticamente las distancias involucradas en la
propagación con la variación de presión de amplitud de una onda generada por el
arribo de la señal directa y el posterior arribo de la misma señal con una diferencia en
la fase. Esta puede ser aplicada a diferentes distancias lo cual entregara un patrón
dinámico de interferencia para una sola frecuencia.
2.1.5.4 Pérdida por Transmisión.
Al Propagarse una onda por un medio líquido existe un fenómeno por perdida de
transmisión el cual ―genera una reducción en la intensidad de la onda ya sea por el
esparcimiento geométrico o la absorción característica del medio‖39.Este fenómeno es
un parámetro clave al momento de detectar una señal debido a que la amplitud de la
señal se reducirá permitiendo obtener una relación señal ruido aceptable.
ROSS40 explica que la intensidad de una onda esférica es proporcional al cuadrado de
la presión de acuerdo a la ecuación (7) esta es inversamente proporcional a la
distancia, esto conlleva a que la intensidad de una fuente simple decae con el
cuadrado de la distancia. Una cantidad logarítmica, para la perdida por la transmisión,
es usada para expresar los cambios de la intensidad acústica y la presión con
respecto a la distancia. Así la pérdida por transmisión, para un medio ideal y sin
pérdida esta dada por la ecuación (8):
(7)
(8)
39
Ibíd., p.18 40
ROSS, Donald.”Mechanics of Underwater Noise” 1ra edición. Península publishing. Los altos,
California. 1976.p.36

52
Donde es la distancia. Para un medio ideal los niveles de presión sonora decaen 6dB
cada vez que se doble la distancia.
2.1.6 Limpieza Industrial.
Para todo establecimiento, ya sea una empresa, una industria, oficinas, organismos
públicos, hospitales, escuelas y hasta en los hogares, la limpieza es un factor
importantísimo para el buen desarrollo de las actividades que se realizan dentro del
espacio destinado para estas. La buena desinfección y limpieza de espacios comunes,
a cantidades significativas de personas, como hospitales y escuelas, es primordial
para evitar el desarrollo de enfermedades y el contagio a la gente que transita por
estos establecimientos. Según el lugar, la aplicación de diferentes productos y
herramientas de limpieza varían, ya que no se pueden utilizar los mismos productos
para realizar la limpieza industrial que en nuestros hogares.
Existen diferentes limpiezas, esta la que se realiza con productos químicos y dentro de
esta, se encuentra una gama de diferentes sustancias cada una aplicable a la
suciedad que se requiera eliminar y cumpliendo con las características del lugar donde
se está realizando la limpieza. También se tiene la limpieza que se ejerce con
mecanismos y aparatos específicos; Estos tipos de limpieza son según el método a
utilizar, pero también se puede decir que hay limpiezas generales, como las de un
simple barrido en una sala de reuniones y otras más dificultosas.
Hablando más específicamente se describe la limpieza industrial, ya que esta es una
de las más complejas, por la cantidad de los métodos y herramientas necesarias para
realizar el trabajo y por los tipos variados de suciedades y desechos que se pueden
encontrar en estas.
El mantenimiento de las instalaciones de las industrias es esencial para el buen
funcionamiento de estas, y la limpieza industrial cumple un papel importante, ya que
las maquinarias que se utilizan en los diferentes tipos de industrias necesitan un buen
funcionamiento para el desarrollo de la actividad correspondiente, y segundo el
mantenimiento evita que las maquinarias se arruinen por el uso a través del tiempo y
así hacerlas durar más, teniendo el dueño de la industria un ahorro económico. Entre
53
la variedad de industrias que existen en el mundo, se clasifican de la siguiente
manera, Industria agrícola (cultivos), Industria comercial (intermediario producción y
consumidor), Industria extractiva (bienes naturales) y la Industria fabril (crea, al utilizar
productos de la naturaleza y materias primas).
2.1.6.1 Tipos de limpieza industrial y sus mecanismos.
Dentro de la Industria fabril, hay un sin fin de tipos, que van desde la producción textil
y alimentos, hasta el desarrollo farmacéutico e industrias automotrices. En todas estas,
la limpieza industrial se debe llevar bajo medidas rigurosas de control. Los tipos de
limpieza industrial y los mecanismos y herramientas que generalmente se utilizan, son
los que se mencionan a continuación.
Cuando se quiere limpiar cañerías o tubos, se puede utilizar un sistema de gases a
presión para retirar la suciedad acumulada, o también el introducir elementos en forma
de balas, que con el roce por las paredes de las cañerías o tubos raspan y retiran los
sedimentos de suciedad. También la aplicación de líquidos a gran presión, para retirar
los residuos no adheridos a paredes o a equipos, es otro método utilizado
frecuentemente cuando la suciedad es más superficial.
De este sistema de líquido a presión, también hay una alternativa la cual se utiliza
agua con arena sometidas a grandes presiones para aumentar el impacto sobre el
lugar que se quiera realizar la limpieza. Estos tipos de limpieza industrial, son más
seguros y prácticos, pero hay ocasiones que la suciedad no se puede eliminar con tal
facilidad, así que se necesita el uso de otro tipo de sustancias. Ahí es cuando entran a
utilizarse los productos químicos, dependiendo la suciedad o contaminante que se
quiera retirar.
Para la eliminación de óxidos en acero inoxidable, con la creación de una superficie
pasiva, o sea que no sea corrosiva. Para la limpieza de sales insolubles o residuos en
cañerías o tubos, se utiliza un método de desincrustación con químicos. Para las
industrias farmacéuticas o alimenticias por ejemplo es muy usual la utilización de un
mecanismo químico que se llama sanitizado. Otro proceso de limpieza industrial muy

54
utilizado es el desengrasado de superficies, dependiendo que tipo de grasa la
aplicación de detergente y solventes adecuados para la eliminación. También la
desoxidación de elementos, ya sea maquinarias, tuberías, tanques, etc, que fueron
creados a base de acero al carbón, método con el cual se pueden retirar de estos
elementos, productos corrosivos del metal. Por ultimo podemos nombrar el fosfatizado
de acero al carbón, el cual consiste en evitar que el fierro entre en contacto con el
oxigeno.
Esto se hace porque el fierro en estado natural puro, es muy raro encontrarlo y
generalmente se encuentra compuesto con oxigeno. Al separarlos el fierro tiende a
querer unirse nuevamente con el oxigeno, como es de esperarse, entonces con este
método se evita el contacto al cubrir al acero con una capa de químicos. Todos estos
métodos y herramientas descriptas forman parte esencial, para un buen
mantenimiento y limpieza industrial.
2.1.6.2 Métodos de limpieza industrial.
En cuanto a los métodos de limpieza se puede hablar de dos grandes grupos: los
manuales y los automáticos. En su mayoría los manuales conllevan el uso de la
energía mecánica, en tanto que los automáticos actúan mayormente a través de la
energía química y térmica. La limpieza manual a su vez, implica distintos métodos a
saber: el método de limpieza por partes (el objeto de limpieza se desarma y así se
procede a su manipulación a través de cepillar piezas y el uso de detergentes), el
método de inmersión (como en el anterior se desarma el objeto, pero la limpieza de las
piezas se produce por inmersión en piletas especiales con detergentes más potentes y
a veces, a altas temperaturas) y también el modo de limpieza de grandes superficies
(aquí la acción de limpieza está dada por el barrido y cepillado con detergentes y
cepillos especiales). Finalmente, los procesos de limpieza automática surgieron por
una cuestión de ahorro y tiempo, luego se fueron perfeccionando no solo en la
maquinaria utilizada sino también en el uso de sustancias que permiten la optimización
de las tareas y su consecución final.
Las técnicas que se fueron desarrollando para diferentes sectores, forman parte
importante hoy en día, del desempeño de grandes industrias y de los grandes grupos
de investigación científica. Una técnica muy interesante y utilizada en varias áreas de
desarrollo es la limpieza por ultrasonido.

55
Con respecto a los materiales y las industrias, el ultrasonido se utiliza para verificar los
sonidos de los átomos en los materiales, ya que el movimiento de los electrones
produce este tipo de ondas. En las industrias, también se utiliza la limpieza por
ultrasonido a piezas especiales por su delicadeza técnica o de difícil acceso. Esto
ocurre porque las vibraciones que genera el ultrasonido, desprende las partículas de
suciedad. La limpieza por ultrasonido, es aplicada en elementos como relojes hasta
piezas de autos.
La limpieza por ultrasonido también se utiliza en aviones, tanto para su higiene como
para su creación, ya que estos utilizan un tipo de metal muy fino, y este tipo de
sistema, tiene muy buen manejo sobre metales extremadamente finos.
2.1.6.3 Limpieza por Ultrasonido.
La limpieza ultrasónica se consigue sumergiendo el objeto en un líquido de limpieza
adecuado y haciendo pasar ultrasonido a través del fluido. La limpieza es más eficaz si
tiene lugar tanto la cavitación como la agitación. Las ondas de choque producidas
durante la cavitación alcanzaran cualquier superficie solida que se encuentra en el
líquido y la restregaran con menos probabilidad de rayar y producir cualquier otro daño
al objeto, que si se efectuara un restregado convencional. Además empelando el
ultrasonido se puede llevar a la acción limpiadora hasta todos los rincones y grietas
que serian inaccesibles para una escobilla o estropajo mecánico. Hay también algunas
industrias como la aeroespacial, en las que los métodos de limpieza habituales no
pueden proporcionar el grado de limpieza necesario para algunos de sus productos.
Además de los diversos sucios especializados, la aplicación de la limpieza ultrasónica
en el contexto industrial ordinario puede proporcionar un ahorro de tiempo, trabajo y
costos.
En la mayoría de los empleos de limpieza ultrasónica y para asegurar que ocurre la
cavitación, se utiliza una frecuencia para la cual la intensidad umbral de cavitación es
bastante baja.
En la práctica, por tanto la mayoría de los equipos de limpieza ultrasónica trabajan con
frecuencias de unos 20 Khz. Para la limpieza de artículos muy delicados, que podrían

56
verse dañados por la cavitación, se emplean frecuencias más elevadas de 100 Khz a 1
Mhz de forma de que no se supere la intensidad umbral de cavitación. La mayoría de
los tanques de limpieza comerciales, que están fabricados generalmente de acero
inoxidable, son bastantes adecuados; la capacidad varia de unos 200 ml a 200 l y se
les puede acoplar un dispositivo que permita la circulación del líquido de limpieza a
través de un filtro. Si el líquido de limpieza es toxico o inflamable será necesario evitar
que el vapor se escape del tanque.
El líquido de limpieza varía según las aplicaciones. No debe considerarse tan solo
como un medio inerte que soporte las vibraciones ultrasónicas y la cavitación; debe
poseer las propiedades exigibles a cualquier buen líquido de limpieza, usado en los
procesos de limpieza convencionales. Se emplean agua, varios ácidos, soluciones
alcalinas y acuosas así como diferentes líquidos orgánicos. En algunos casos el
empleo de ultrasonido ha permitido que un líquido relativamente caro sea diluido o que
sea reemplazado por otro más barato.
Entre los diferentes tipos de fuente que se emplean en la limpieza ultrasónica se
encuentran los generadores mecánicos, transductores magnetostrictivos y
transductores piezoeléctricos, aunque los generadores mecánicos no se emplean
extensamente. El generador electrónico, que alimenta el transductor, es normalmente,
bastante sencillo, con estrecho rango de frecuencia y una salida de potencia fija (que
va de unos 500 W a unos 5 Kw). Al principio se usaba el cuarzo como material
piezoeléctrico, pero recientemente el titanato de bario ha llegado a ser muy importante.
Las ventajas de un material piezoeléctrico sintético como el titanato de bario se basan
en su flexibilidad en la elección de la forma del transductor y poco coste relativo del
material transductor; sin embargo, el titanato de bario, tiene la desventaja de no poder
emplearse a temperaturas superiores a unos 80° C. Los materiales que se emplean en
los procesos de limpieza ultrasónica que utilizan transductores magnetostrictivos son
el níquel y ciertas ferritas.
Entre las numerosas aplicaciones de la limpieza ultrasónica en su uso actualmente,
están la limpieza de piezas de fundición, hilos y cables, monedas antiguas (romanas),
cuchillería, películas, trónqueles, mohos e hilanderas, piezas de maquinas de
combustión interna, instrumental quirúrgico y dental etc.

57
2.2 MARCO LEGAL O NORMATIVO
Para este proyecto no existen normas que limiten de manera única o estandarizada el
proceso de limpieza ultrasónica. Sin embargo, existe una norma sobre la exposición
laboral a frecuencias ultrasónicas, emitida por el ministerio de trabajo y asuntos
sociales de España con la colaboración del instituto nacional de seguridad e higiene
en el trabajo, del mismo país.
Tabla 3. Ficha técnica de la norma NTP 205.
Norma NTP 205: Ultrasonidos: exposición laboral
Emitida por Ministerio de trabajo y asuntos sociales de España / instituto
nacional de seguridad e higiene en el trabajo
Redactor Manuel Gómez – Cano Hernández ingeniero industrial
Vigencia Valida
Criterios técnicos Operativos
Año de expedición 2004
Fuente: Autores
Si el lector requiere profundizar sobre la norma ver Anexo 1
Así mismo existen serie de normas y leyes internacionales que regulan la utilización de
frecuencias ultrasónicas, con frecuencias entre los 2MHz hasta 30MHz, en la industria
médica; estas frecuencias son utilizadas para la creación de imágenes de órganos
internos (medical Imaging, imagenología ó ecografías). A continuación nombraremos
algunas de las normas más representativas de todos los procedimientos ultrasónicos
con fines médicos, o sistemas de imagenología.
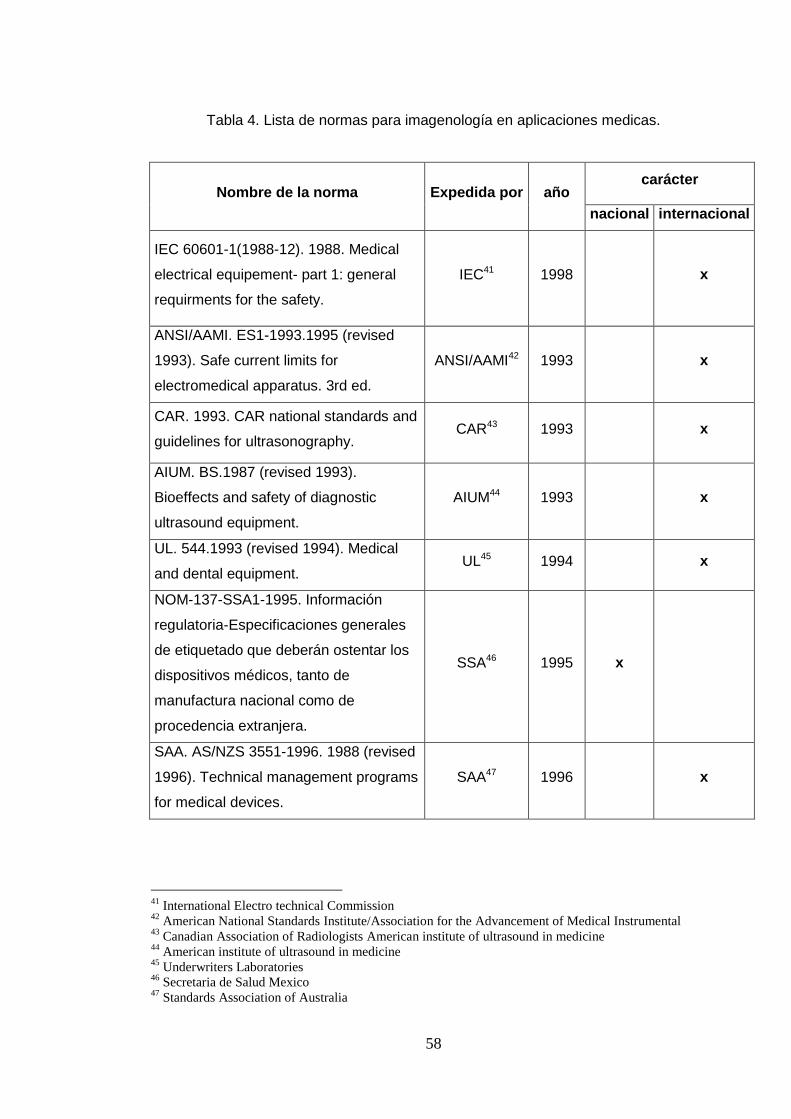
58
Tabla 4. Lista de normas para imagenología en aplicaciones medicas.
Nombre de la norma Expedida por año carácter
nacional internacional
IEC 60601-1(1988-12). 1988. Medical
electrical equipement- part 1: general
requirments for the safety.
IEC41 1998 x
ANSI/AAMI. ES1-1993.1995 (revised
1993). Safe current limits for
electromedical apparatus. 3rd ed.
ANSI/AAMI42 1993 x
CAR. 1993. CAR national standards and
guidelines for ultrasonography. CAR43 1993 x
AIUM. BS.1987 (revised 1993).
Bioeffects and safety of diagnostic
ultrasound equipment.
AIUM44 1993 x
UL. 544.1993 (revised 1994). Medical
and dental equipment. UL45 1994 x
NOM-137-SSA1-1995. Información
regulatoria-Especificaciones generales
de etiquetado que deberán ostentar los
dispositivos médicos, tanto de
manufactura nacional como de
procedencia extranjera.
SSA46 1995 x
SAA. AS/NZS 3551-1996. 1988 (revised
1996). Technical management programs
for medical devices.
SAA47 1996 x
41
International Electro technical Commission 42
American National Standards Institute/Association for the Advancement of Medical Instrumental 43
Canadian Association of Radiologists American institute of ultrasound in medicine 44
American institute of ultrasound in medicine 45
Underwriters Laboratories 46
Secretaria de Salud Mexico 47
Standards Association of Australia

59
AIUM. UDP. 1996. Update in duplex
power and color flow imaging. AIUM 1996 x
AIUM. QA. 1995 (reviewed 1998) Quality
assurance manual for gray-scale
ultrasound: stage II.
AIUM 1998 x
AIUM/CDRH/NEMA RTD.1998.
Standard for real-time display of thermal
and mechanical acoustic output indices
on diagnostic ultrasound equipment.
AIUM/CDRH/
NEMA48 1998 x
BIR. 1998. Safe use of diagnostic
ultrasound. BIR49 1998 x
CR. 1998. Occupational standards for
diagnostic ultrasound. CR50 1998 x
NOM-197-SSA1-2000. Que establece
los requisitos mínimos de infraestructura
y equipamiento de hospitales y
consultorios de atención médica
especializada.
SSA 2000 x
IEC 60601-1-2 (2001-09). 2001. Medical
electrical equipment — part 1: general
requirements for safety. Section 2.
Collateral standard: electromagnetic
compatibility — requirements and tests.
IEC 2001 x
US DHHS.FDA. 21 CFR 1050.2002.
Performance standards for sonic,
infrasonic, and ultrasonic radiation-
emitting products.
US
DHHS.FDA51 2002 x
IEC 60601-2-37 Ed. 1.0. Medical
electrical equipment — part 2: particular
requirements for the safety of ultrasonic
IEC 2009 x
48
American Institute of Ultrasound in Medicine/Center for Devices and Radiological Health/National
Electrical Manufacturers Association 49
British Institute of Radiology 50
College of Radiographers 51
U.S. Department of Health and Human Services. Food and Drug Administration.

60
medical diagnostic and monitoring
equipment.
Fuente: Guía tecnológica No.18: ultrasonido, sistema de imagenología (GMDN 40760).
Secretaria de salud. México 2009.
2.2.1 Otras
2.2.1.1 Recomendaciones
Como ya se ha manifestado anteriormente, no existen normas ni legislación que regule
el uso de dispositivos de limpieza ultrasónica. No obstante, hay una serie de
recomendaciones sobre la exposición ante las frecuencias ultrasónicas y sus posibles
efectos en la salud, como también recomendaciones sobre la manipulación de
maquinas de limpieza por cavitación acústica.
A continuación se hará referencia a las recomendaciones más significativas en el
desarrollo de este proyecto de grado.
La exposición directa (transductor - piel) a frecuencias ultrasónicas durante
periodos de tiempo largos, pueden ocasionar una serie de efectos nocivos para
la salud como: sobrecalentamiento del los tejidos del cuerpo debido a la
absorción de energía, nauseas, dolores de cabeza, fatiga, efectos subjetivos,
daños en la audición. Es por esta razón que se recomienda NO exponer
ninguna parte del cuerpo por más de 15 min de manera directa a los emisores
ultrasónicos.52
Para la exposición por vía aérea, y aunque estamos hablando de frecuencias
que no son percibidas por el aparato auditivo humano, se sugieren unos límites
de presión sonora en función de la frecuencia debido a los sub-armónicos
producidos por los transductores. Las directrices de la ICNIRP53 han publicado
una lista de dichos límites.
52
Branson Ultrasonic Corporation 1999. Paper. The Ultrasonic Advantage 53
International commission on non-ionizing radiation protection.

61
Tabla 5. Limites de exposición en dB a frecuencias ultrasónicas
frecuencia
(Khz.)
nivel de presión sonora
(dB)
20 75
25 110
31,5 110
40 110
50 110
Fuente: Universidad de Cardiff, Sheridan Morgan, 2010, la radiación ultrasónica, Pg. 2
Figura 13. Limites de exposición en dB frecuencias ultrasónicas
Fuente: Autores
No se deben exponer a frecuencias ultrasónicas disolventes químicos, o
líquidos altamente volátiles, sustancias pirofóricas, compuestos
organometálicos, metales alcalinos, o bases organometálicas, ya que pueden
inducir un incendio o explosión, especialmente si se exponen directamente.
También se deben tener en cuenta los riesgos eléctricos.54
54
Miguel Ángel Barceló, Rado, Jeroni Morey Salva, Los ultrasonidos: sus riesgos y normas de
prevención. Mapfre seguridad N 90, 2003 Pg. 15

62
Si el ultrasonido se manipula en líquidos, se deben tomar medidas preventivas
frente a los vapores emanados por las reacciones sonoquímicas, que toman
parte dentro del liquido. Dichos vapores pueden ser tóxicos (HCN, CO),
irritantes (HCI, H2SO4, Br2), o sofocantes (fosgeno, difosgeno, cloropicrina) Se
recomienda utilizar tapabocas.55
Se deben evitar siempre las exposiciones superiores a 100KW/m2 ya que
pueden generar calentamiento de la piel o incluso los huesos, hasta llegar a la
destrucción de tejidos por los efectos de la cavitación. Los límites en tiempo de
la exposición directa al ultrasonido se muestran a continuación.
Figura 14. Límites de exposición por contacto propuesto por Nyborg
Fuente: Miguel Ángel Barceló, Rado, Jeroni Morey Salva, Los ultrasonidos: sus riesgos
y normas de prevención. Mapfre seguridad N 90, 2003 Pg. 15
No sumerja los dedos en los baños de agua (sonificación ó limpieza), o maneje
el transductor directamente durante el funcionamiento (incluso si las manos
tienen guantes)56
Utilice protección auditiva si es necesario. Si el equipo ultrasónico está en
funcionamiento durante largo periodos de tiempo, este deberá ser aislado57
55
Ibid Pg.16 56
Universidad de Cardiff, Sheridan Morgan, 2010, la radiación ultrasónica, Pg. 3 57
Ibid Pg. 3

63
Utilice pinzas de plástico o canastas para sumergir o recuperar los elementos
que hacen contacto con los líquidos mientras.58
Los cortes en la piel debido a la ruptura de accidental de vidrios en el baño
ultrasónico, hacen pertinente la utilización de guantes y gafas que provean la
seguridad necesaria, para evitar dicho supuesto.
Se debe señalar convenientemente el área en donde se encuentra el
generador de ultrasonidos. Para ello se utilizará el símbolo de peligro por
exposición a ultrasonidos mostrado a continuación.
Figura 15. Símbolo de peligro por exposición a ultrasonidos
Fuente: Miguel Ángel Barceló, Rado, Jeroni Morey Salva, Los ultrasonidos: sus riesgos
y normas de prevención. Mapfre seguridad N 90, 2003 Pg. 15
Se recomienda la instalación de una campana de humos sobre el área de
limpieza ultrasónica, para de esta manera eliminar los gases, vapores o
aerosoles que puedan ser emitidos por el efecto sonoquímico del mismo.
El vidrio sucio debe someterse a un prelavado, y el agua del contenedor
deberá ser cambiada cada vez que este sucia. De esta manera se minimizará
en gran medida la formación de perjudiciales.
Las personas responsables de la manipulación de maquinas o dispositivos
generadores de frecuencias ultrasónicas, deben recibir la capacitación
58
Ibid Pg 4

64
adecuada sobre el manejo de dichos elementos; además de mostrarles las
consecuencias que podría traer la mala utilización del ultrasonido en sus
diferentes aplicaciones
Debido a su fácil manejo y accesibilidad, se puede decir que los generadores y
demás dispositivos ultrasónicos NO son peligrosos. sin embargo su principal
riesgo es precisamente el descuidar las medidas de seguridad; por lo tanto no
debemos olvidar que aunque dichos dispositivos no representan mayor peligro,
su uso entraña ciertos riesgos que deben ser conocidos y evitados.59
59
Miguel Ángel Barceló, Rado, Jeroni Morey Salva, Los ultrasonidos: sus riesgos y normas de prevención. Mapfre seguridad N 90,
2003 Pg.17.

65
3 METODOLOGÍA
3.1 ENFOQUE DE LA INVESTIGACIÓN
El enfoque de la investigación es empírico-analítico que se centra principalmente en el
estudio técnico de las frecuencias e intensidades producidas por el ultrasonido por
medio líquido, además de reconocer y estudiar el fenómeno de cavitación acústica;
donde se elabora un producto que desarrolle un proceso aplicable para ciertos
campos de la ingeniería de sonido.
3.2 LÍNEA DE INVESTIGACIÓN DE USB / SUB- LÍNEA DE FACULTAD / CAMPO
TEMATICO DEL PROGRAMA
Línea de investigación de la Universidad: Tecnologías actuales y sociedad.
A través de la historia y durante el desarrollo de la ciencia, la sociedad requiere día a
día la constante renovación e implementación de nuevas tecnologías que busquen
aumentar la calidad de vida del ser humano. La ciencia y la tecnología brindan la
posibilidad de mejorar y dar soluciones a problemas que se presentan diariamente en
todos los procesos de la industria.
Este proyecto hace uso de tecnologías de vanguardia y conocimientos actualizados
sobre temas específicos para presentar una solución viable dentro del campo ingenieril
con el fin de dar respuesta a los problemas y satisfacer necesidades que la sociedad
presenta.
Es importante que el proceso de investigación este enfocado a contribuir con el
desarrollo técnico y científico del profesional; que además integre distintas aéreas del
conocimiento desarrolladas a lo largo de la carrera, y que permita un desarrollo íntegro
del estudiante como profesional.
Sub- línea de investigación: Instrumentación y control de procesos.
La instrumentación y el control de procesos es un campo de la ingeniería que busca
implementar y manejar tecnologías que tengan un alto impacto y presenten aportes

66
científicos a los procesos industriales en los que haga parte el hombre. Este proyecto
tiene como finalidad y aplicabilidad el desarrollo del proceso de limpieza con
ultrasonido, el cual, es de gran ayuda y muy utilizado con alto grado de eficiencia en la
limpieza de partes de la industria en general.
Campo temático del programa: Diseño de sistemas de sonido y acústica.
El diseño de sistemas de sonido comprende el desarrollo de prototipos para la
generación de señales. Este proyecto tiene como parte fundamental el diseño y
construcción de un sistema para la generación y amplificación de ondas ultrasónicas.
Con respecto a la acústica, se estudia el fenómeno de la cavitación, el cual es la base
teórica del proyecto así como también el comportamiento subacuático del ultrasonido.
3.3 TÉCNICAS DE RECOLECCIÓN DE INFORMACIÓN
3.3.1 Instrumento de medición análoga/digital.
Para hacer la medición del circuito de generación y amplificación, se verificó con el
osciloscopio la señal de salida en la parte de la conmutación y se hizo la medición de
la onda a la entrada del transductor.
3.3.2 Prototipo de generación ultrasónica.
Para generar las ondas ultrasónicas a 40KHz se utilizó el prototipo de generación y
como parte importante dos transductores de ultrasonido los cuales se encuentran
ubicados dentro del contenedor líquido lugar en donde se sumergen las piezas a
limpiar.
3.3.3 Instrumento de captura.
Se usaron sensores ultrasónicos conectados al osciloscopio para verificar que los
transductores de ultrasonido estuvieran generando los 40KHz.
3.3.4 Desarrollo de las pruebas.
Para la comprobación del fenómeno de cavitación acústica se realizaron pruebas con
puntillas con cinco tipos diferentes de suciedad, en cuatro soluciones distintas,
midiéndose el grado de limpieza de manera subjetiva recolectando la información de
carácter estadístico.

67
3.4 HIPÓTESIS
Con base al conocimiento adquirido y las bases teóricas encontradas en la
investigación, acerca de la limpieza industrial con ultrasonido; específicamente con
cavitación acústica, además de las variables que controlan dicho fenómeno físico, se
podría argumentar que: la cavitación acústica es una solución viable y bastante
eficiente en el proceso de limpieza de piezas industriales.
3.5 VARIABLES
3.5.1 VARIABLES INDEPENDIENTES
Contenedor.
Temperatura y cantidad del líquido para la limpieza.
Generador de frecuencia de 40 Khz.
Amplificador de potencia.
Transductor ultrasónico.
Tipo de suciedad.
Tiempo de exposición de la pieza al ultrasonido.
3.5.2. VARIABLES DEPENDIENTES
Velocidad, frecuencia y amplitud de la onda ultrasónica en la solución.
Nivel de presión sonora en el líquido.
Porcentaje subjetivo de limpieza.

68
4 DESARROLLO INGENIERIL
El presente trabajo de investigación, tiene como objetivo primordial, lograr limpiar
diferentes objetos a través de la cavitación acústica. Tal cual se ha especificado en los
objetivos, este proyecto tiene dos grandes partes y de acuerdo a ellas se estructuró el
cronograma y cada uno de los eventos consecuentes al mismo.
A continuación se mostrará detalladamente en qué consiste cada una de las partes,
además de documentar el proceso realizado para la construcción del prototipo.
4.1 Generación Ultrasónica.
La generación ultrasónica, no es simplemente poder generar el ultrasonido; son
bastantes factores y componentes que son necesarios para el objetivo final.
Figura 16. Diagrama de flujo sobre el circuito eléctrico
Fuente: Autores
La generación ultrasónica a su vez fue dividida en las cinco etapas mostradas en la
figura 16. A continuación, se profundizara y explicará cada una de ellas

69
4.1.1 Adquisición del transductor ultrasónico.
Para la consecución de la generación ultrasónica, es trascendental contar con las
características eléctricas y físicas del transductor; ya que dependiendo de ellas, se
podrá calcular y construir el resto de componentes del proyecto. Cabe aclarar, que NO
es parte del proyecto de grado el construir un transductor ultrasónico; dada la
complejidad del transductor requerido; además, la construcción del mismo es en sí un
proyecto de grado.
Sin duda alguna, los transductores son el eje central del proyecto (como también de
todas las maquinas y dispositivos de limpieza ultrasónica), puesto que este es quien
induce la energía necesaria para la formación de cavitación acústica dependiendo de
la frecuencia de operación, la alimentación eléctrica que este resista, la potencia que
sea capaz de generar, y la fidelidad de cada uno de sus componentes.. Además,
condiciona directamente el diseño y construcción de todo el circuito electrónico, del
contenedor y demás componentes que intervienen en el proceso de limpieza.
Los transductores utilizados en este proyecto fueron construidos por las empresas
PARSONICS CORP (935 Dieckman street, Woodstock IL 60098, USA) y
CLANGSONIC (Yuhuan County Xia Doumen industrial zone, CHINA) . Dadas las
características del proyecto de grado, estos transductores cuentan con varias de las
especificaciones requeridas para llevar el proyecto a buen término.
El transductor de la empresa PARSONICS de serie 4012 A, está hecho de zirconato
de titanio, esta encapsulado en pvc, es resistente al agua, y a su vez tiene las
especificadores citadas a continuación:
Tabla 6. Especificaciones transductor 4012 ª
Frecuencia de mejor operación 40KHz +/- 4%
Sensibilidad mínima de recepción -60dB
Impedancia 600 Ω +/- 30%
Rango típico de sensibilidad 1.3ft - 45ft
Ancho de banda 13° +/- 2°
Voltaje máximo de funcionamiento 500 Vp-p

70
Temperatura de operación -40°F -165°F
Máxima potencia admisible 40W
Fuente: Autores
Figura 17. Transductor 4012 ª
Fuente: Parsonics Corp, 4012 A transducer, datasheet
Como es de suponerse, las primeras pruebas de laboratorio realizadas, fueron con el
fin de constatar el buen desempeño del transductor. Además de comprobar la
veracidad de las especificaciones enviadas por el constructor. Dichas pruebas son las
siguientes:
Con la ayuda de uno de los generadores de frecuencia de la universidad de
San Buenaventura sede Bogotá, se comprobó el buen funcionamiento del
transductor.
Como primer parámetro de prueba se hizo un barrio de frecuencia entre 10KHz
hasta 40KHz, donde efectivamente, el barrido era claramente audible (hasta
los 15KHz aproximadamente). El barrido de frecuencia fue realizado también

71
con el transductor ubicado dentro de una cubeta con agua obteniendo de esta
manera, los mismos resultados.
Para poder comprobar objetivamente el barrido de frecuencia; en especial,
comprobar si la frecuencia producida por el generador, es la misma que el
transductor reproduce, fue necesaria una pequeña medición con el sonómetro
SVANTEK 943.
Figura 18. Generador y osciloscopio de la USB.
Fuente: los autores
Esta medición, efectivamente, demuestra que el transductor tiene un buen
desempeño. Sin embargo, el sonómetro solamente es capaz de proporcionarnos
valores inferiores a los 20KHz, por lo que dicha prueba se puede considerar
incompleta pues las frecuencias entre 20KHz y 40KHz, son imposibles de medir con
los equipos de la universidad.
Debido a las características eléctricas del generador de frecuencia, y claro está, según
las especificaciones aportadas por el constructor del transductor, es necesaria la
utilización de un amplificador de potencia (cuya pertinencia con el proyecto ya fue
mencionada en el primer objetivo específico del mismo).

72
Pero antes de proceder al diseño y construcción del amplificador, es necesario hacer
algunas pruebas con el transductor y algunos amplificadores existentes. Dichas
pruebas fueron realizadas con los amplificadores de la universidad y de esta manera
fue posible el entendimiento del funcionamiento del transductor.
La primera prueba fue realizada con un amplificador de 500w de potencia, sin
embargo, debido a la alta impedancia del transductor, los parámetros eléctricos del
amplificador son insuficientes para poder lograr los 40W requeridos.
Según las referencias encontradas, de maquinas similares a esta, se sabe que es
necesario alcanzar el máximo de potencia posibles con el transductor; dichas
referencias (a niveles de limpieza industrial con dimensiones mucho mas grandes que
las proyectadas en este trabajo de grado), muestran claramente la utilización de
potencias superiores a los 100w además de una alimentación eléctrica, en algunas
ocasiones superior a los 220 v
Este fenómeno también está presente con el transductor utilizado, ya que debido a su
alta impedancia, y para poder lograr una potencia de 40w, es necesaria, mucha más
tensión y corriente eléctrica.
Si tenemos que:
Entonces, con los voltajes arrojados por las fuentes de voltaje continuo de la
universidad tenemos:
Tabla 7. Comparaciones de voltaje y potencia en el transductor 4012ª
Voltaje (Voltios)
Potencia (Watts)
26,6 1,17
49,5 4,08
60 6
Fuente: Autores

73
Voltios
Las pruebas anteriores nos muestran la necesidad de utilizar un voltaje elevado para
poder alcanzar la potencia deseada.
Dichas pruebas fueron realizadas igualmente, dentro y fuera del agua; no siendo
perceptible el fenómeno de la cavitación, seguramente debido a los niveles de
potencia tan bajos presentes en cada una de las pruebas.
A pesar del buen comportamiento inicial de dicho transductor, su impedancia
dificultaba el diseño, construcción y acople del circuito de amplificación de potencia del
mismo, y después de varios meses de pruebas con diferentes tipos de amplificadores,
el transductor se quemó, convirtiendo pertinente la necesidad de buscar otro
transductor que tuviera características eléctricas y mecánicas mas versátiles para la
limpieza por cavitación acústica.
Los transductores adquiridos a continuación fueron fabricados por la empresa
CLANGSONIC, modelo CN 4038-45LA. Dichos transductores son comparativamente
mejores para la cavitación acústica pues según el fabricante, fueron creados con ese
fin. Además presentan características electrónicas más favorables para el proyecto en
curso. A pesar de esto, los nuevos transductores son mucho más delicados y no
tienen el asombroso ancho de banda presenciado por el anterior transductor.
4.1.2 Funcionamiento del transductor CN4038-50 LA.
Este transductor funciona en base a cerámicas piezoeléctricas y esta contenido por
acero inoxidable. A continuación mostraremos las características electrónicas del
transductor.

74
Tabla 8. Datos electrónicos del transductor CN4038-45P8
DATOS ELECTRÓNICOS DEL TRANSDUCTOR CN4038-45 P8
Ítem CN4038-45LA P8
Frecuencia 40+/- 0.5 KHz
Ancho de banda >2000Hz
Capacitancia 3200+/-10% pF
Resistencia de resonancia ≤25Ω
Máxima potencia de entrada 80 W
Superficie irradiadora ɸ 50mm
Diámetro de la cerámica ɸ38mm
Tornillo de conexión Ninguno
Torque de conexión 20nm
Altura 44mm
Ancho 324g
Temperatura máxima del solvente 100 C
Foto
Fuente: ClangSonic Transducer Catalog data sheet.
Según PPB MEGASONICS, una empresa reconocida internacionalmente por fabricar
medidores de cavitación para limpiadores ultrasónicos, y algunos estudios hechos
sobre la cavitación acústica y sus efectos de limpieza, la energía requerida para
generar una fuerza cavitadora lo suficientemente grande para limpiar debe ser de
50W-100W por galón de agua.60 (es pertinente aclarar que hay otro tipo de parámetros
que pueden intervenir en estos datos como: la frecuencia, la amplitud, la temperatura
del agua, tiempo de exposición y propiedades físicas y químicas del solvente).
60
Y.Wu, C. Franklin ,M. Brand and B Fraser, Acoustic property characterization of a single wafer
megasonic cleaner, Verteq Inc, Santa Ana CA, en http://www.megasonics.com/ECSpaper.pdf( (vi 8 Julio
2010)

75
Razón por la cual se pretende hacer un limpiador de 1 galón con dos transductores
(para maximizar el proceso de limpieza). Teniendo en cuenta las características de los
transductores, se puede concluir que son apropiados y tienen las características
apropiadas para este proyecto.
Los transductores tienen además algunas características de producción citadas a
continuación:61
Baja impedancia de resonancia
Alto valor de Q mecánico
Alta eficiencia en la transformación eléctrica-ultrasónica
Buena estabilidad de calor
Poca fiebre
Buena consistencia de la frecuencia y la capacitancia estática
Buena amplitud, alta velocidad de vibración
Tiempo de vida extenso, para limpieza más uniforme y más energía cinética.
El transductor ultrasónico se ha convertido en la pieza clave y más importante en la
construcción y desarrollo del proyecto, ya que gracias a sus características se
establece el diseño del circuito de generación y de potencia, así como también el
diseño del contenedor.
El transductor utilizado es el CN4038-50 LA, de la empresa Clangsonic, especialista
en este tipo de sistemas. Fue escogido debido a que es especialmente diseñado para
producir en un alto grado cavitación acústica, lo cual nos asegura la generación de
este fenómeno en el líquido. Mencionando sus especificaciones se puede comprobar
de manera clara la anterior afirmación ya que tiene una potencia nominal de hasta
80w, es decir, la máxima potencia requerida en condiciones normales a una frecuencia
de resonancia de 40KHz, como ya se ha mencionado anteriormente es la frecuencia
central y sobre la que se trabaja en el desarrollo del presente proyecto. A comparación
de los otros transductores de este tipo el CN4038-50 LA, era el de más alta potencia
en dicha frecuencia de resonancia.
61
Clangsonic, transducer characteristics, en http://www.clangsonic.com/features_en.asp (visto en 20
agosto 2010)

76
A continuación se muestra la composición de este transductor ya que el fabricante se
reserva la publicación del diseño y construcción.
El siguiente esquema muestra las dimensiones de cada parte del transductor.
Figura 19. Dimensiones del transductor CN4038-50 LA
Fuente: Clangsonic transducer catalog data sheet.
Según el anterior esquema el transductor se compone de cuatro partes las cuales son:
Superficie de radiación.
Figura 20. Superficie de radiación del transductor ultrasónico CN4038-50 LA.
Fuente: Autores.

77
La superficie de radiación recubierta en acero y con un diámetro de 50mm es la
encargada de la deformación para transmitir el ultrasonido a los 40KHz sin ningún tipo
de problemas cuando haga contacto con el líquido.
Placas de Cerámica.
Figura 21. Placas de cerámica del transductor ultrasónico CN4038-50 LA.
Fuente: Autores.
Las cerámicas piezoeléctricas pertenecen al grupo que da mayor flexibilidad de
formato y de propiedades, siendo ellas ampliamente utilizadas en la fabricación de
equipos industriales, específicamente en sistemas de limpieza, equipos de soldadura
por ultrasonido, para ensayos no destructivos y equipos para monitorear vibraciones.
Esta cerámica es la base del transductor y tiene como fundamento el fenómeno de
piezoelectricidad. La cerámica piezoeléctrica es un cuerpo macizo constituido por
cristales ferroelectricos llamados policristalinos, que tienen como característica
presentar un dipolo eléctrico donde las cargas eléctricas positivas no coinciden con el
centro de simetría de las cargas negativas. La existencia de este dipolo hace que la
estructura cristalina se deforme en presencia de un campo eléctrico generando así un
desplazamiento eléctrico, cuando es sometida a una deformación mecánica.

78
Láminas de Polarización.
Figura 22. Placas de polarización.
Fuente: Autores.
Estas placas hechas de cobre debido a que este material como ya es conocido
presentan un alto grado de conductividad eléctrica, ductilidad y maleabilidad.
Estas placas son las encargadas de generar el campo eléctrico en el
transductor ya que enlazan las dos placas de cerámica entre sí con la
superficie de radiación.
Placa posterior.
Figura 23. Placa posterior del transductor.
Fuente: Autores.
Esta placa hecha en acero permite una mayor generacion del campo electrico en el
transducto

79
4.1.3 Generación de la señal ultrasónica y control de conmutación.
Como es de suponerse, el circuito electrónico es parte fundamental en el desarrollo de
este proyecto de grado, puesto que aparte de conformar varios de los objetivos a
conseguir, es precisamente el buen desarrollo electrónico el que permitirá trabajar a
los transductores a las frecuencias, voltajes y demás características electrónicas
necesarias para que estos puedan inducir la cavitación en un líquido.
El primer paso a seguir es, determinar las características necesarias para lograr la
cavitación con los transductores de la empresa CLANGSONIC. Sin embargo, las más
importantes según el diseño pensado son la frecuencia de operación, el tipo de onda o
señal producida, la amplitud y máximo voltaje de entrada (para no dañar los
transductores).
Como primera medida, se tiene la frecuencia de operación del dispositivo la cual está
totalmente ligada a la frecuencia de operación del transductor. (Ítem tratado
debidamente en el numeral 4.1.1); vale la pena aclarar que según las fuentes
bibliográficas, la frecuencia de 40.000 Hz es comúnmente utilizada en este tipo de
dispositivos de limpieza. Igualmente la frecuencia de resonancia de los transductores
utilizados es la misma, lo que quiere decir que el transductor emitirá su máxima
amplitud en esta frecuencia de operación.
Si bien la frecuencia es fundamental para el diseño y construcción del circuito
electrónico, el tipo de onda o señal a producir es igualmente importante. Si se plantea
que entre más presión o energía el transductor sea capaz de generar, el efecto de
cavitación será más evidente y/o potente, será necesario utilizar una señal que sea
capaz de emitir niveles de energía lo más alto posible; las ondas cuadradas cumplen
con este cometido, ya que al ser una suma de muchas ondas sinusoidales, tiene la
capacidad de generar su máximo voltaje de emisión durante cada microciclo de onda
(en cada λ/2).
Teniendo en cuenta dichos parámetros (40KHz y ondas cuadradas), se decidió utilizar
el circuito integrado TL 494 el cual presenta los siguientes parámetros electrónicos. El
TL494 incorpora todas las funciones necesarias para la construcción modulador de
ancho de pulso (PWM), con un circuito de control en un chip. Diseñado principalmente
para el control de la fuente de alimentación, este dispositivo ofrece la flexibilidad
necesaria para adaptar la fuente de alimentación del circuito de control.
Aplicaciones:

80
El regulador interno proporciona 5v estables.
La arquitectura del circuito permite una facil sincronización.
Maneja un tiempo muerto variable que proporciona control sobre todo el rango.
El circuito interno impide el pulso doble a la salida.
El control de salida maneja el metodo Push-pull.
Fuentes de corriente de hasta 200mA
Figura 24. Configuración interna del microcontrolador TL494
Fuente: Disponible en http://pdfdata.datasheetsite.com/web/65751/TL494.pdf
[consultado el 23 de agosto de 2010].
Tabla 9. Tabla de función.
Fuente: disponible en http://pdfdata.datasheetsite.com/web/65751/TL494.pdf
[consultado el 23 de agosto de 2010].
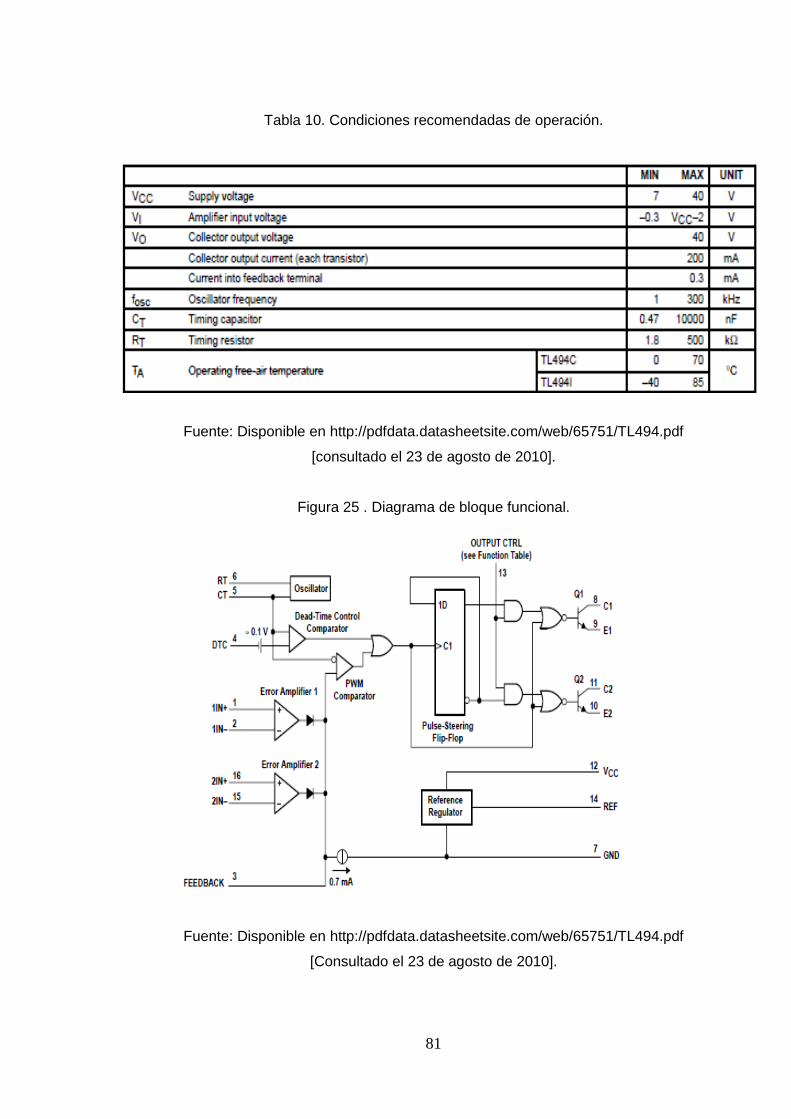
81
Tabla 10. Condiciones recomendadas de operación.
Fuente: Disponible en http://pdfdata.datasheetsite.com/web/65751/TL494.pdf
[consultado el 23 de agosto de 2010].
Figura 25 . Diagrama de bloque funcional.
Fuente: Disponible en http://pdfdata.datasheetsite.com/web/65751/TL494.pdf
[Consultado el 23 de agosto de 2010].

82
Figura 26 . Circuito operacional y forma de onda.
Fuente: Disponible en http://pdfdata.datasheetsite.com/web/65751/TL494.pdft [Consultado el 24 de agosto de 2010].
Este circuito integrado presentará dos salidas, en las que se observará dos ondas
cuadradas invertidas 180 grados una con la otra, que al ser sumadas generarán así
una gran onda de señal cuadrada, como se muestra en la figura siguiente. De igual
manera es importante que estas señales estén separadas puesto que cada una de
ellas activará un transistor por separado (algo a lo que se hará su debida referencia
más adelante), y únicamente al final de todo el circuito electrónico la señal asignada a
los transductores será sumada como se ha dicho anteriormente.

83
Figura 27. Formación de la señal cuadrada.
Fuente: Autores
Los transistores (de los que se hará referencia más adelante), serán los encargados
de recibir las dos señales producidas por este circuito integrado; sin embargo, al ser
una señal cuadrada estos necesitarán un tiempo para regresar a la normalidad o
estado inicial, este tiempo se conoce como dead-time o tiempo muerto, y está en el
orden de los µs. Otro aporte importante de este tiempo muerto es el de prevenir un
corto, ya que en el punto que tengan en común se estará enviando información a los
dos transistores al mismo tiempo.
Como se ilustra en la siguiente imagen, en los tiempos t1 comienza el tiempo muerto
dead-time, en donde los transistores tendrán tiempo para regresar a la normalidad, y el
tiempo t2 es donde dicho tiempo muerto termina dando paso a las señal requerida. Es
importante tener en cuenta que el circuito integrado TL 494, es capaz de realizar esta
conmutación internamente, lo cual lo hace propicio para poder generar las señales
requeridas por este trabajo de grado.

84
Figura 28. Conmutación, de tiempo muerto
Fuente: Autores
El control de tiempo muerto deseado se obtuvo utilizando una resistencia de 47Ω.
Inicialmente se utilizo con un potenciómetro de 10Ω en serie, el cual permitía definir la
duración del tiempo muerto, sin embargo, este control funciona correctamente con la
resistencia sin necesidad del potenciómetro. El resto de elementos fueron colocados
teniendo en cuenta las instrucciones aportadas por el datasheet del integrado TL 494.
Algunos elementos fueron cambiados por otros con valores cercanos a los sugeridos;
no obstante, el comportamiento del montaje con los parámetros utilizados en este
proyecto se comporta de una manera bastante eficiente.
Tabla 11. Elementos electrónicos del montaje del TL 494
# de pin función Elemento
4 DTC (dead control time) control de tiempo muerto
47 KΩ
6 RT
1K Ω con una potenciómetro en serie de 10K Ω (permite ajustar la frecuencia de salida)

85
5 CT Condensador 103 con 10.000pf de capacitancia
13 y 14 OUTPUT CONTROL, ó control de salida
47k Ω
8 Salida 1 270 Ω
11 Salida 2 270 Ω
12 Vcc y salida 2
1,7,9,10,16 GND
Fuente: Autores
La siguiente etapa está definida por los optoacopladores los cuales tienen como
principal la de eliminar las tierra comunes e cada uno de los micro ciclos o salidas
proporcionadas por el TL 494. Estos son muy útiles cuando se utilizan por ejemplo,
Microcontroladores PICs y/o PICAXE, si se quiere proteger el microcontrolador este
dispositivo es una buena opción. En general pueden sustituir los relés ya que tienen
una velocidad de conmutación mayor, así como, la ausencia de rebotes.
La gran ventaja de un optoacoplador reside en el aislamiento eléctrico que puede
establecerse entre los circuitos de entrada y salida. Fundamentalmente este
dispositivo está formado por una fuente emisora de luz, y una foto sensor de silicio,
que se adapta a la sensibilidad espectral del emisor luminoso, todos estos elementos
se encuentran dentro de un encapsulado que por lo general es del tipo DIP (Dual In-
line Package ).
Los optoacopladores utilizados en el circuito son los de referencia HCPL 4503, y
como se ha mencionado anteriormente, su función es la de eliminar tierra comunes.
Sin la ayuda del optoacoplador, la corriente puede pasar de una salida a otra a través
de la tierra en común que puedan tener en el circuito, en la conmutación de cada
transistor mos-fet generando así, un corto. La próxima grafica ilustra el fenómeno
brevemente.

86
Figura 29. Operación de los Optoacopladores en los transistores Mosfet
Fuente: Autores
De la misma manera, el optoacoplador HCPL-4503, tiene el siguiente diagrama de
conexión.

87
Figura 30. Diagrama de conexión del optoacoplador HCPL-4503
Fuente: Disponible en www.datasheetcatalog.com/ [Consultado el 3 de septiembre de 2009].
Según este diagrama, y algunos cambios realizados en el circuito, se decide utilizar los
siguientes elementos electrónicos en el mismo.
Tabla 12. Elementos electrónicos en el optoacoplador HCPL-4503
# de pin función Elemento
3 Cátodo 180 kΩ
6 Vo 4,7 kΩ
5 GDN
2 Ánodo
Fuente: Autores

88
Debido a la fuerte distorsión ocasionada por los optoacopladores, la señal emitida por
el TL 494, no se divisaba correctamente, razón por la cual fue necesario un
condensador que regulara y corrigiera esta señal.
Una vez solucionado el problema de la tierra común, y luego de una medición en el
osciloscopio, la señal que debiera ser cuadrada, salía en forma de diente de sierra;
este comportamiento ocurre por causa de los mosfet, ya que estos (quienes recibirán
toda la señal) piden más corriente que la proporcionada por el TL.
La solución para este problema es la de implementar al circuito un driver que
suministre la corriente necesaria a los mosfet para su correcto funcionamiento. El
driver escogido es el TC 4421 el cual según su funcionamiento garantiza el
suministro de la corriente necesaria a los mosfet. Vale la pena resaltar que las dos
señales emitidas por el TL siguen separadas, por lo tanto es necesario realizar todos
estos procedimientos por separado para cada señal.
Figura 31. Diagrama de conexión del driver TC4421
Fuente: Disponible en http://www.datasheetcatalog.com/datasheets [Consultado el 3
de septiembre de 2010].
Sin embargo estos driver utilizan mucha corriente que es transmitida a los mosfet a
la velocidad del oscilador (40.000 veces por segundo) lo cual genera ruido. Este
inconveniente se soluciona instalando unos condensadores, lo cual controlaran el paso
de corriente en el TC4421 y evitaran el ruido emitido por la corriente.
Como ultimo parámetro para tener en cuenta en este circuito de generación y
conmutación, es importante verificar la fase de las señales en cada uno de los
elementos instalados. Aquí, es posible ver como los optoacopladores y los driver

89
TC4421, invierten las señales 180 cada uno, dato que evidentemente, obstruye el
buen funcionamiento del circuito.
La solución a este problema está en utilizar un negador a la salida del TL 494, de esta
manera cuando el opto acoplador y el driver inviertan la fase de la señal, esta
quedará como se ha planteado desde un comienzo.
De acuerdo a todo lo anteriormente planteado, el circuito electrónico que permite la
generación de una señal cuadrada, con una frecuencia de oscilación de 40KHz y con
su respectivo control de conmutación está señalado en el siguiente diagrama con
cada una de sus conexiones y elementos electrónicos.

90
Figura 32. Circuito de generación y conmutación
Fuente: Autores

91
4.1.4 Amplificación de la señal.
Tal y como se ha planteado en el segundo objetivo especifico, es necesario construir
un circuito que amplifique la señal producida en la etapa de generación y control; este
circuito debe ser capaz de emitir la potencia necesaria para producir cavitación,
además de ser compatible con el tipo de señal producida en la etapa anterior.
Para este cometido, se utilizó el modelo de los inversores de medio puente (sobre el
cual se hace referencia en el capítulo 2), en donde el voltaje necesario para la
amplificación podrá depender del proporcionado por la red eléctrica. Otro factor de
suma importancia que incorpora este diseño, es el de proporcionar la corriente
requerida por la carga; esto significa que el circuito de amplificación no necesitará ser
diseñado para un posible acople de impedancias entre la carga y el mismo, al
contrario, cada una de los requerimientos electrónicos del transductor serán suplidos
por la red.
El funcionamiento de este circuito está fundamentado en los transistores mosfet, los
cuales consisten en un sustrato de material semiconductor dopado en el que,
mediante técnicas de difusión de dopantes, se crean dos islas de tipo opuesto
separadas por un área sobre la cual se hace crecer una capa de dieléctrico culminada
por una capa de conductor.
Las áreas de difusión se denominan fuente (source) , drenador (drain), y el conductor
entre ellos es la puerta (gate).
El funcionamiento del circuito planteado consiste en crear dos compuertas que puedan
conmutar las dos señales emitidas por el TL 494 (las dos señales cuadradas). De esta
manera, mientras un mosfet está abierto y permitiendo el flujo de una señal, el otro
estará cerrado impidiendo el flujo de la otra señal. Este proceso se realizara en la
frecuencia de oscilación de las dos señales. (40KHz). En otras palabras, un mosfet le
brindará la amplitud a la señal con el microsiclo positivo, y el otro a la del microsiclo
negativo de la señal.
Como estos transistores mosfet se cargan con el voltaje de la red electrónica, es
necesario que tengan a su vez un periodo de tiempo en donde se descarguen; este
tiempo es el tiempo muerto referido en la etapa de generación y conmutación de la
señal. Como es de suponerse, sin este tiempo muerto o dead time, los mosfet no
tendrían la posibilidad de descargarse, lo se convertiría en un gran problema, puesto
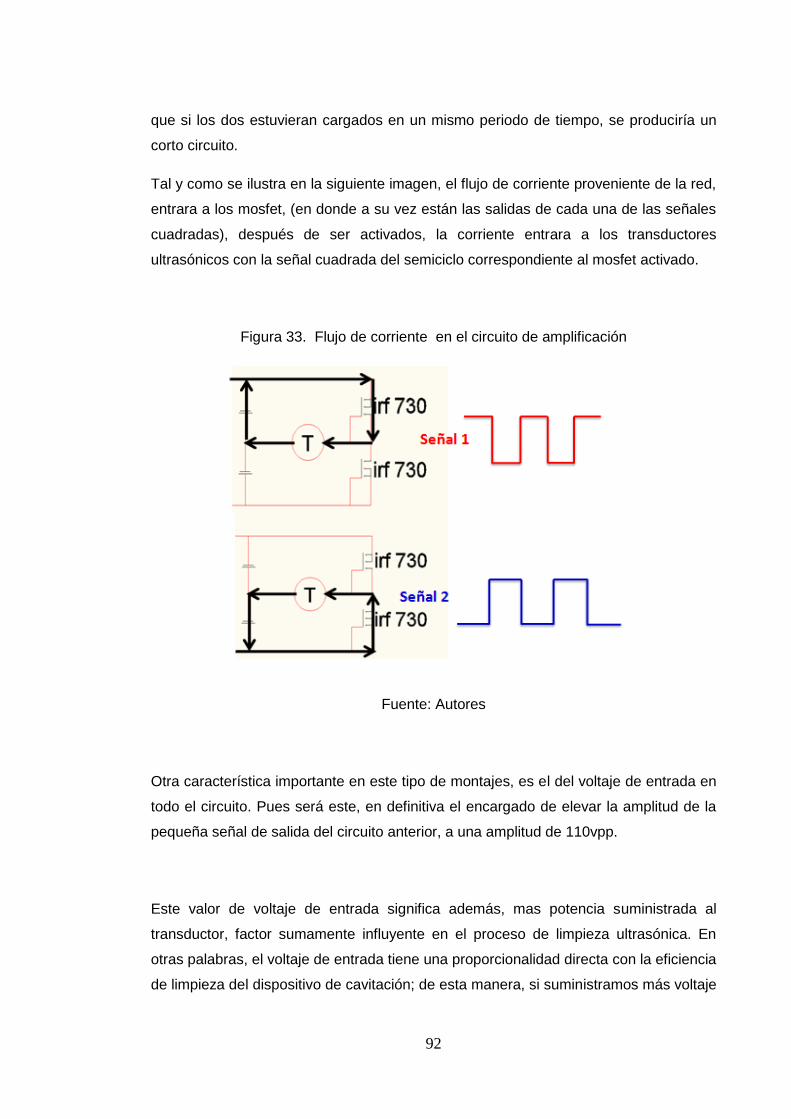
92
que si los dos estuvieran cargados en un mismo periodo de tiempo, se produciría un
corto circuito.
Tal y como se ilustra en la siguiente imagen, el flujo de corriente proveniente de la red,
entrara a los mosfet, (en donde a su vez están las salidas de cada una de las señales
cuadradas), después de ser activados, la corriente entrara a los transductores
ultrasónicos con la señal cuadrada del semiciclo correspondiente al mosfet activado.
Figura 33. Flujo de corriente en el circuito de amplificación
Fuente: Autores
Otra característica importante en este tipo de montajes, es el del voltaje de entrada en
todo el circuito. Pues será este, en definitiva el encargado de elevar la amplitud de la
pequeña señal de salida del circuito anterior, a una amplitud de 110vpp.
Este valor de voltaje de entrada significa además, mas potencia suministrada al
transductor, factor sumamente influyente en el proceso de limpieza ultrasónica. En
otras palabras, el voltaje de entrada tiene una proporcionalidad directa con la eficiencia
de limpieza del dispositivo de cavitación; de esta manera, si suministramos más voltaje

93
que el proporcionado por la red eléctrica, el dispositivo mencionado en este proyecto
producirá más energía cavitatoria y por ende ofrecerá un mejor grado de limpieza.
El mosfet destinado para este proyecto es el IRF730 el cual posee las siguientes
características electrónicas.
Mosfet IRF730.
Aplicaciones:
Circuitos de conmutación de potencia.
Interruptor de alta corriente.
Fuente de alimentación ininterrumpida (UPS).
DC/DC conversor para telecomunicaciones, industriales y equipos de iluminación.
Tabla 13. Configuración básica Mosfet IRF730
Fuente: Disponible en www.datasheetcatalog.net [Consultado el 5 de septiembre de 2010].
Figura 34. Configuración del Mosfet IRF730
Fuente: Disponible en www.datasheetcatalog.net [Consultado el 5 de septiembre de 2010].

94
Tabla14. Especificaciones del Mosfet IRF730
Fuente: Disponible en www.datasheetcatalog.net [Consultado el 5 de septiembre de 2010].
El circuito de amplificación, además de los transistores tiene dos condensadores, de
200µf, los cuales estarán encargados de almacenar y mantener la señal en
condiciones óptimas. Es importante que cada uno de los componentes electrónicos,
sean idénticos a cada lado del circuito.
Una vez hecho el montaje del circuito, se pudo observar que el comportamiento
capacitivo del transductor piezo eléctrico no es compatible con la señal suministrada
por el circuito. Este hecho fue comprobado mediante las mediciones tomadas en el
osciloscopio; si se conecta directamente el transductor, la señal se distorsiona,
generando ruido lo que hace imposible una conexión de este tipo.
El comportamiento capacitivo del transductor está sujeto al comportamiento de las
cerámicas piezo eléctricas y la capacidad que el mismo tenga de guardar energía; al
mismo tiempo, el transductor ultrasónico posee un componente de carga resistiva.
Este fenómeno es conocido en la electrónica como impedancia, donde existe un valor
resistivo que se denomina en números reales, y un valor que indica la capacitancia, el
cual será ilustrado en valores imaginarios.
Sin embargo, el circuito tiene un correcto funcionamiento en cargas resistivas, donde
la señal de la onda es una amplificación confiable de la señal generada por el TL 494.
A raíz de este pequeño inconveniente, se decidió instalar en paralelo a los
transductores, un bombillo de 100 vatios de potencia, el cual se comporta como una

95
carga resistiva que estabiliza la señal, contrarrestando los valores de capacitancia del
transductor.
Vale la pena aclarar que el bombillo se comporta aun mejor que un resistor
convencional, pues aparte de suministrar la impedancia que estabiliza la carga, es
capaz de disipar la energía en luz y calor, de esta manera logra soportar la potencia
suministrada por el circuito. Por otro lado, los resistores convencionales en el mercado
soportan una potencia máxima de 10 watts, por lo que al ser conectados en el circuito
amplificador se queman.
El circuito de amplificación será ilustrado en su totalidad en la siguiente grafica.
Figura 35. Circuito de amplificación
Fuente: Autores
4.1.5 Alimentación eléctrica del dispositivo.
Una vez definido el funcionamiento del circuito electrónico que genera una señal
cuadrada con amplitud de 110v, (la cual se considera suficiente para producir la

96
cavitación acústica en un líquido). Es necesario proporcionar la alimentación eléctrica
a cada uno de los componentes que así lo requieran.
Como primera medida se tiene la necesidad de convertir el voltaje de 110vpp alterno
de la red, en un voltaje de 9vpp continuo, puesto que los elementos electrónicos
utilizados en el circuito de generación y control funcionan con voltajes con valores
cercanos a este.
Para este cometido, se utilizaron dos transformadores de voltaje de 110vpp a 9vpp,
seguidos de un puente de diodos y un condensador de 1000µf. cada transformador
está destinado a cada microciclo de onda cuadrada generada por el TL 494.
A pesar de esto, el voltaje continuo necesario en el circuito de generación y control, no
es constante y debe ser modificado un par de veces según el funcionamiento de los
elementos dispuestos en el mismo.
Para lograr estos cambios de voltaje DC dentro del circuito electrónico, te utilizan los
reguladores de voltaje 7805 y 7809
Figura 36. Diagrama interno de un regulador 7805 y 7809.
Fuente: Disponible en www.neoteo.com [Consultado el 5 de septiembre de
2010].

97
Estos reguladores de voltaje con salida fija, entregan una corriente máxima de 1
Amperio y soporta consumos pico de hasta 2.2 Amperios. Poseen protección contra
sobrecargas térmicas y contra cortocircuitos, que desconectan el regulador en caso de
que su temperatura de juntura supere los 125 °C. Así, un LM7805 es capaz de
entregar 5 voltios positivos y el lm7809 entrega 9 voltios. En la figura siguiente, se
observa la disposición de pines de estos reguladores, el pin 1 corresponde a la
entrada (input), el pin 2 es el punto común (common) y el pin3 es el correspondiente a
la salida (output).
Figura 37. Configuración de pines regulador LM7805
Fuente: Disponible en www.neoteo.com [Consultado el 5 de septiembre de 2010].
La figura 32 es el esquema eléctrico de una fuente de 5V a partir de la red de 220V (o
110V, simplemente cambiando el transformador). El transformador de entrada se
encarga de reducir la tensión de red a 9 voltios de corriente alterna, que será
rectificada por los cuatro diodos dispuestos en forma de puente. A la salida del puente
de diodos tendremos presente una tensión continua algo mayor a 10 voltios, con un
pequeño ripple que será eliminado por el capacitor electrolítico C1. El resto del circuito
es equivalente al de la figura 6, tal lo propuesto en la hoja de datos del LM7805.

98
Figura 38. Diseño del circuito a partir de los reguladores lm7805 y lm7809.
Fuente: Disponible en www.neoteo.com [Consultado el 5 de septiembre de 2010].
Se utilizó un regulador 7805 para garantizar un voltaje de 5vpp en la entrada del TL
494 y el negador y se utilizaron dos reguladores 7809 para mantener 9vpp en el
optoacoplador y el driver de corriente.TC4421.
Para la alimentación eléctrica del circuito de potencia, se utilizo un puente rectificador
de 4 amperios y un condensador de 2200µf; esta rectificación está precedida de un
fusible de 10 amperios, el cual ayudará con la protección del circuito de potencia.
Todos estos parámetros de alimentación eléctrica, están ilustrados con claridad en los
diagramas de los circuitos anteriormente mostrados.
4.2 Diseño del contenedor.
Para el diseño del contenedor, se tendrán en cuenta las características físicas del
transductor, además de algunas recomendaciones de los fabricantes de limpiadores
ultrasónicos.
Para comenzar, es necesario tener en cuenta las referencias de potencia de
transducción por galón recomendadas por PPB MEGASONICS62 de 50w -100w por
galón de agua. Por esta razón se decidió utilizar dos transductores de 80W cada uno
en un contenedor de 1 galón de capacidad.
62
Y.Wu, C. Franklin ,M. Brand and B Fraser, Acoustic property characterization of a single wafer
megasonic cleaner, Verteq Inc, Santa Ana CA, en http://www.megasonics.com/ECSpaper.pdf( (vi 8 Julio
2010)

99
Los transductores deben estar ubicados en el fondo del contenedor, y a una misma
altura, para de esta manera poder evitar cancelaciones por desfases; muchas
empresas para evitar estas cancelaciones no manejan una frecuencia estable en los
transductores o simplemente los colocan en diferentes frecuencias de operación.
El contenedor a su vez debe soportar el peso del agua, y los efectos vibratorios que la
energía ultrasónica pueda generar en ella. Otro aspecto para considerar es el de la
dilatación del transductor por el calor, ya que esta es una de las características de los
transductores piezoeléctricos y aunque el fabricante dice que la dilatación es mínima,
es mejor tener este factor en cuenta.
El material escogido para construir el contenedor es el acrílico de 8mm de grosor. Ya
que este tipo de material aparte de ser resistente, es capaz de vibrar levemente con el
transductor. En la actualidad el material utilizado es el acero inoxidable, debido a su
durabilidad, flexibilidad, resistencia al calor y asepsia. A pesar de esto, el acrílico es
mucho más versátil para los fines académicos mencionados en el proyecto, además
de permitir una excelente visual de cada uno de los procesos llevados a cabo dentro
del contenedor.
Figura 39. El diseño del contenedor.

100
Fuente: Autores
El diseño mostrado en los planos anteriores tiene la capacidad de contener 3750 cm
cúbicos de líquido, dato bastante similar al del galón que se estaba buscando.
De la misma forma, existen unas formulas que recomiendan el tamaño del tanque
contenedor para los efectos de limpieza por ultrasonido, dependiendo de la potencia o
la superficie transductora. Dichas formulas están en el sistema americano de medidas,
por lo que toca hacerlas en pulgadas.
La primera formula indica el volumen de solvente máximo requerido para la limpieza
por cavitación acústica, según la potencia del transductor ultrasónico utilizado.
63
Donde:
W= potencia del transductor
A= superficie irradiadora de energía ultrasónica en
Reemplazando con los datos del contenedor tenemos que
63
Lawrence Azar, Cavitation in ultrasonic cleaning and cell distruption, controlled environments
magazine, febrero 2009, pag 15

101
Para 1 transductor
Para 2 transductores
De los cálculos anteriores se concluir que según la potencia irradiada por los
transductores, es posible tener el proceso de limpieza ultrasónica en 1,34 galones de
solvente con un transductor y 5,67 galones con dos transductores. Teniendo en cuenta
dichos cálculos, se puede decir a su vez que la potencia generada por dos
transductores ultrasónicos de 80W de potencia cada uno, en un contenedor de 1 galón
de solvente líquido, es más que suficiente para producir los efectos de limpieza por
cavitación acústica.
Para la segunda formula hay que tener en cuenta el comportamiento mecánico del
contenedor, puesto que en su fondo (que es donde los transductores van a ser
colocados). Habrá vibraciones que refuercen la energía ultrasónica. En otras palabras,
el fondo del contenedor funcionará como parte del transductor. es por esto que el área
del fondo del contenedor tiene una incidencia directa con el comportamiento de la
cavitación dentro del contenedor.
Se dice que la base del contenedor no debe ser mayor que / 1 galón64
El contenedor diseñado para este proyecto de grado, tiene como base un área de
y su equivalente en pies cuadrados es de . Lo cual indica que el área
del fondo del contenedor tiene y está dentro de los rangos de área recomendados para
los efectos de la cavitación acústica.
La última fórmula dedicada al diseño de contenedores de limpieza ultrasónica por
cavitación acústica, es aquella que indica la potencia media requerida según el
volumen del contenedor, para obtener así el efecto de limpieza ultrasónica deseado.
64
Lawrence Azar, Cavitation in ultrasonic cleaning and cell distruption, controlled environments
magazine, febrero 2009, Pg 14

102
Esta fórmula es bastante importante puesto que los fabricantes la utilizan en sus
especificaciones técnicas, ya que según ellos, no se garantiza el efecto limpiador,
cuando la potencia utilizada es menor a la potencia media; algunos dispositivos,
cuando los niveles de potencia son menores, simplemente se apagan.
65
Donde:
L= largo en pulgadas
W=ancho en pulgadas
H=alto en pulgadas
Reemplazando por los valores del contenedor se tiene que:
Si bien esta fórmula no indica la potencia a la que el efecto de cavitación comienza a
tomar parte, puede decir que según los fabricantes de este tipo de dispositivos,
niveles de potencia por debajo de 63,37W no serán útiles para la limpieza por
cavitación acústica.
Además, según los niveles de potencia presupuestados para este proyecto, se puede
concluir que según las referencias teóricas, el dispositivo construido cumple y supera
ampliamente con las recomendaciones en capacidad, potencia, volumen y áreas
recomendadas.
El contenedor debe tener en cuenta los transductores y su comportamiento ya que
como se ha mencionado anteriormente, los transductores piezo eléctricos tienden a
expandirse con el calor generado por ellos, esto de la misma forma condicionas el
diseño del contenedor ya que los transductores no podrán quedar de ninguna manera
estáticos; debido a las propiedades físicas del acrílico, si el transductor queda
adherido directamente a él, posiblemente el acrílico se romperá ya sea por la
expansión por el calor que este pueda tener (expansión que no supera a un par de
milímetros según el fabricante), ó por la posible oscilación del transductor. Dadas
estas razones, se diseñaron dos agujeros de 6cm de diámetro, dejando un centímetro
65
Ibid , Pg 14
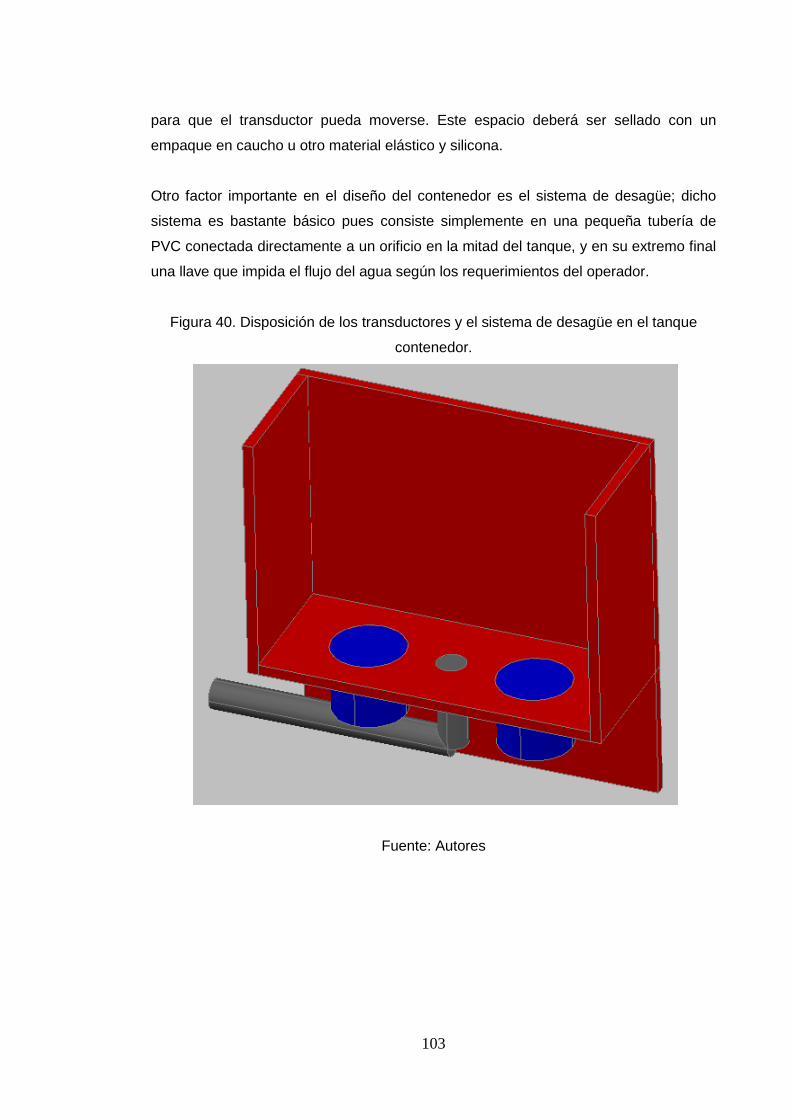
103
para que el transductor pueda moverse. Este espacio deberá ser sellado con un
empaque en caucho u otro material elástico y silicona.
Otro factor importante en el diseño del contenedor es el sistema de desagüe; dicho
sistema es bastante básico pues consiste simplemente en una pequeña tubería de
PVC conectada directamente a un orificio en la mitad del tanque, y en su extremo final
una llave que impida el flujo del agua según los requerimientos del operador.
Figura 40. Disposición de los transductores y el sistema de desagüe en el tanque
contenedor.
Fuente: Autores

104
5 ANALISIS DE RESULTADOS
5.1 Análisis Electrónico.
A continuación se presentaran una serie de imágenes obtenidas con el osciloscopio
digital RIGOL DS 1062CA, en donde se pueden comprobar el comportamiento
electrónico de los circuitos desarrollados en este trabajo de grado.
En primera instancia se tiene una muestra las salidas del control de conmutación y
generación de frecuencias ultrasónicas, de igual manera se puede observar la señal
de salida de 5vpp en cada una de las dos señales de salida.
Figura 41. Salida del circuito integrado TL 494.
Fuente: Autores
Otro factor importante, que es claramente visible en la imagen previa es el tiempo de
conmutación.

105
La siguiente figura ilustra claramente el comportamiento del negador que es
conectado después del circuito integrado TL 494. Se puede observar claramente como
las señales se mantienen, pero su fase es modificada en 180 grados.
Figura 42. Salida del negador.
Fuente: Autores
A continuación se puede observar el comportamiento del optoacoplador, en una de las
señales o salidas del TL 494; se puede ver claramente como el voltaje aumenta de 5 a
10 (a causa de los reguladores de voltaje 7809). De la misma manera es claro ver
como la señal comienza a deteriorase con relación a la emitida por la etapa anterior,
razón por la cual es necesario el condensador comentado en el capítulo 4.

106
Figura 43. Salida de la señal en el optoacoplador.
Fuente: Autores
La siguiente etapa de medición esta en el comportamiento del driver de corriente
TC9421, el cual como ya se ha mencionado en el capitulo anterior, le da la corriente
requerida al circuito para su buen desempeño; sin embargo, la cantidad de ruido
introducido por este dispositivo debe ser controlado por un condensador en la salida
de esté, aún así, es posible ver un pequeña cresta en la imagen del osciloscopio, tal y
como se muestra en la siguiente grafica.

107
Figura 44. Comportamiento del driver de corriente.
Fuente: Autores
Por último y no menos importante se tiene la señal que llega al mosfet, esta señal llega
nuevamente con una amplitud de 5vpp, para que este pueda amplificarlo a los niveles
ya mencionados anteriormente; la señal que reciben los dos mosfet son exactamente
iguales, garantizando así la correcta conmutación de estos, además de la generación
de la señal cuadrada amplificada total. Si las señales no fueran iguales, la señal final
(la que es transmitida a la carga o transductor), no tendría la misma amplitud
esperada.

108
Figura 45. Señal de entrada a los Mosfet.
Fuente: Autores
5.2 Comprobación de limpieza.
El principal objetivo de este proyecto de grado, es el lograr la limpieza de piezas
metálicas por medio de la cavitación inducida acústicamente; y a pesar del buen
funcionamiento de la maquina y de poder evidenciar el efecto limpiador de la misma,
es imposible calcular y comprobar de una manera objetiva la efectividad del dispositivo
de limpieza debido a las razones citadas a continuación:
I. la limpieza por cavitación acústica NO discrimina los objetos sometidos a la
limpieza, es por esto que las aplicaciones de este tipo de dispositivos es
amplia y acoge a todo tipo de elementos sin importar sus características
físicas, mecánicas o morfológicas (tela, granos de café, cristales, lentes,
joyas, todo tipo de metales, plásticos). En consecuencia, la limpieza por
cavitación acústica está sujeta a los parámetros físicos, químicos y
morfológicos de los diferentes tipos de suciedad a limpiar o eliminar;
teniendo en cuenta parámetros como el tamaño de las partículas de
suciedad (dadas en micrómetros o nanómetros de diámetro), la viscosidad
de las partículas (siendo más complicada la limpieza en partículas mas
viscosas) y la adhesión de las partículas al elemento a limpiar.

109
II. La suciedad es una característica no uniforme que depende de varios
factores externos, como el medio ambiente, la temperatura, la humedad, el
lugar etc. Por ejemplo, nunca se encontraran dos puntillas con el mismo
tipo de oxido, o dos válvulas con el mismo tipo de suciedad por grasa o
aceite. Eliminando así, toda posibilidad de comparación de limpieza de
cualquier elemento sometido a la cavitación.
III. El único parámetro de posible medición en la limpieza por cavitación
acústica es el tamaño de las partículas eliminadas, pero como se ha
mencionado anteriormente, son de dimensiones tan pequeñas que
dificultan esta labor, además de requerir equipos especializados en
mediciones microscópicas.
Dadas estas razones se puede concluir que no es posible determinar de una manera
cuantificable el grado de efectividad de este tipo de dispositivos, y aunque los grandes
fabricantes aseguren niveles superiores al 90% no hay manera de determinar estos
datos con total objetividad.
Sin embargo, es posible realizar una aproximación estadística de la capacidad
limpiadora de la maquina teniendo en cuenta la apreciación cualitativa de la limpieza.
Es claro que con una cantidad aceptable de muestras es posible determinar ciertas
tendencias en el comportamiento de la maquina, con cada una de las diferentes
variables que puedan afectar el comportamiento del dispositivo de limpieza. A
continuación se mostrarán los resultados arrojados por este pequeño muestreo en
donde se busca obtener un valor cuantificable de los niveles de limpieza de este
dispositivo.
Las pruebas realizadas sobre el dispositivo de limpieza mencionado en este proyecto
se realizaron teniendo en cuenta la falta de homogeneidad de la suciedad en las
diferentes piezas expuestas a la cavitación. Es por esta razón que se decidió el tomar
un solo elemento de prueba con diferentes tipos de suciedad.
El elemento seleccionado es una puntilla de acero (como ya se ha mencionado
anteriormente, el objeto a limpiar es indiferente con el proceso de limpieza), esta
puntilla será cubierta con diferentes tipos de materiales, considerados como agentes

110
externos al elemento, con el fin de poder controlar las variables sujetas a estas
pruebas.
Se utilizaron cinco tipos de suciedad sobre las puntillas (aserrín, arena, esmalte, tinta
vaselina), además de cuatro diferentes variables, la primera (prueba) es simplemente
agua, la segunda es agua sometida a la cavitación acústica, la tercera es adhiriendo
un 20% de alcohol al liquido contenedor y la cuarta es calentando el agua hasta
valores cercanos al punto de ebullición. A parte de esto, se tendrá en cuenta el tiempo
de exposición de cada uno de los elementos en uno, dos y tres minutos de exposición
cada uno.
Se repetirá el procedimiento cinco veces por cada tipo de suciedad dando como
resultado 25 muestras en cada una de las variables, y un total de 100 puntillas para
analizar
Para poder determinar el grado de limpieza proporcionado por la máquina de
cavitación acústica, a partir de apreciaciones subjetivas se tomara como referencia
una escala de valores detallada a continuación.
Figura 46. Escala de valores de apreciaciones subjetivas de limpieza.
Fuente: Autores
Vale la pena aclarar que si bien los valores son evaluados por medio de una
percepción subjetiva, después de varias pruebas y con la ayuda del muestreo
estadístico es posible localizar o determinar una tendencia. Claro está que entre más
muestras se tomen, los valores al final del muestreo serán más cercanos a la realidad,

111
sin embrago, este ejercicio ayudará a determinar el comportamiento de limpieza en el
dispositivo proporcionando valores cercanos a la realidad.
La primera prueba es la de colocar las puntillas en el agua a temperatura ambiente y
sin cavitación acústica, esto se hace con el fin de tener una muestra de control. Se
sumergirán cinco puntillas con cada tipo de suciedad y se monitorearán cada minuto
de exposición durante tres minutos. Los resultados son los siguientes:
Interpretación de las tablas presentadas a continuación
Tabla 15. Prueba de control.
Aserrín en agua
Tiempo de exposición Porcentaje de
valoración de limpieza 1 minuto 2 minutos 3 minutos
0-20% 5 5 5
20%-40% 0 0 0
40%-60% 0 0 0
60%-80% 0 0 0
80%-100% 0 0 0
Arena en agua
Tiempo de exposición Porcentaje de
valoración de limpieza 1 minuto 2 minutos 3 minutos
0-20% 5 3 3
20%-40% 0 2 2
40%-60% 0 0 0
60%-80% 0 0 0
80%-100% 0 0 0
Esmalte en agua
Tiempo de exposición Porcentaje de
valoración de limpieza 1 minuto 2 minutos 3 minutos
0-20% 5 5 5
20%-40% 0 0 0
40%-60% 0 0 0
60%-80% 0 0 0
80%-100% 0 0 0
Tinta en agua
tiempo de exposición Porcentaje de
valoración de limpieza 1 minuto 2 minutos 3 minutos

112
0-20% 5 5 4
20%-40% 0 0 1
40%-60% 0 0 0
60%-80% 0 0 0
80%-100% 0 0 0
Vaselina en agua
tiempo de exposición Porcentaje de
valoración de limpieza 1 minuto 2 minutos 3 minutos
0-20% 5 5 5
20%-40% 0 0 0
40%-60% 0 0 0
60%-80% 0 0 0
80%-100% 0 0 0
Fuente: Autores
Modo de interpretación de tablas.
Estas tablas deben ser interpretadas de la siguiente forma, se presenta una casilla en
donde están ubicados los valores de porcentaje de limpieza, un recuadro que muestra
el tiempo de exposición dividido en un minuto, dos minutos y por ultimo tres minutos.
En las casillas de intersección de estos dos grupos se puede observar la cantidad de
puntillas a las cuales les fue removido el tipo de suciedad al que fueron expuestos, por
ejemplo, el primer recuadro muestra el comportamiento del prototipo cuando se
sumerge en agua durante uno, dos y tres minutos cinco muestras recubiertas con
aserrín. En un minuto cinco piezas obtuvieron un porcentaje de limpieza del 0 al 20%,
luego las mismas cinco puntillas fueron expuestas a otro minuto adicional para así
completar los dos minutos dando como resultado un 0 y 20% de limpieza, por ultimo
estas muestras fueron sumergidas a un minuto más para completar tres minutos
obteniendo un porcentaje entre el 0 y 20%.
Tal como se esperaba, el efecto del agua sobre los materiales y los diferentes tipos de
suciedad es poco efectivo, ya que solo se perciben pocos cambios en un par pruebas.
Este primer ensayo es fundamental para poder hacer cualquier tipo de comparación ya
que así determinamos el efecto real de la cavitación descartando cualquier efecto
limpiador del agua. Hubo cambios significativos en la arena después de dos minutos
de prueba, aparte de esto, todo está en la normalidad.

113
La siguiente prueba es la realizada con el efecto de la cavitación inducida
acústicamente, en donde se sigue el mismo procedimiento que en la prueba anterior.
Los resultados muestran satisfactoriamente el efecto de limpieza por cavitación
acústica, ya que todos los tipos de suciedad fueron removidos parcialmente de las
diferentes puntillas.
Los datos mostrados a continuación explican el comportamiento del dispositivo de
cavitación en este experimento.
Figura 47. Comportamiento en aserrín en agua con cavitación.
Fuente: Autores
0-20% 20%-40% 40%-60% 60%-80%80%-100%
1 min 4 1 0 0 0
2 min 3 2 0 0 0
3 min 1 3 1 0 0
00,5
11,5
22,5
33,5
44,5
nu
mero
de e
lem
en
tos l
imp
iad
os Aserrín en agua con cavitación

114
Figura 48. Comportamiento de arena en agua con cavitación.
Fuente: Autores
Figura 49. Comportamiento de esmalte en agua con cavitación.
Fuente: Autores
0-20%20%-40%
40%-60%
60%-80%
80%-100%
1 min 1 4 0 0 0
2 min 1 2 2 0 0
3 min 1 1 3 0 0
00,5
11,5
22,5
33,5
44,5
nu
mero
de e
lem
en
tos l
imp
iad
os Arena en agua con cavitación
0-20% 20%-40% 40%-60% 60%-80%80%-100%
1 min 5 0 0 0 0
2 min 5 0 0 0 0
3 min 4 1 0 0 0
0
1
2
3
4
5
6
nu
mero
de e
lem
en
tos l
imp
iad
os Esmalte en agua con cavitación

115
Figura 50. Comportamiento de tinta en agua con cavitación.
Fuente: Autores
Figura 51. Comportamiento de vaselina en agua con cavitación.
Fuente: Autores
Según estos gráficos se puede concluir que el efecto de la cavitación en este
dispositivo de limpieza es suficiente para limpiar parcialmente los elemento
0-20% 20%-40% 40%-60% 60%-80%80%-100%
1 min 3 2 0 0 0
2 min 2 2 1 0 0
3 min 0 3 1 1 0
0
0,5
1
1,5
2
2,5
3
3,5n
um
ero
de e
lem
en
tos l
imp
iad
os
Tinta en agua con cavitación
0-20% 20%-40% 40%-60% 60%-80%80%-100%
1 min 5 0 0 0 0
2 min 4 1 0 0 0
3 min 3 2 0 0 0
0
1
2
3
4
5
6
nu
mero
de e
lem
en
tos l
imp
iad
os
Vaselina en agua con cavitación

116
expuestos, sin embrago, como es claro en la información recolectada, el efecto de
cavitación no es lo suficientemente fuerte como para limpiar las diferentes puntillas en
su totalidad.
La siguiente prueba donde se utilizó una mezcla de 20% alcohol y 80% agua en el
líquido contenedor, además de la cavitación. Los resultados son los siguientes.
Tabla 16.prueba de cavitación con alcohol al 20%
aserrín en agua con cavitación y alcohol al 20%
tiempo de exposición Porcentaje de
valoración de limpieza 1 minuto 2 minutos 3 minutos
0-20% 4 3 1
20%-40% 1 1 3
40%-60% 0 1 1
60%-80% 0 0 0
80%-100% 0 0 0
esmalte en agua con cavitación y alcohol al 20%
tiempo de exposición Porcentaje de
valoración de limpieza 1 minuto 2 minutos 3 minutos
0-20% 5 5 3
20%-40% 0 0 2
40%-60% 0 0 0
60%-80% 0 0 0
80%-100% 0 0 0
tinta en agua con cavitación con alcohol al 20%
tiempo de exposición Porcentaje de
valoración de limpieza 1 minuto 2 minutos 3 minutos
0-20% 5 4 3
20%-40% 0 1 2
40%-60% 0 0 0
60%-80% 0 0 0
80%-100% 0 0 0
vaselina en agua con cavitación y alcohol al 20%
tiempo de exposición Porcentaje de
valoración de limpieza 1 minuto 2 minutos 3 minutos
0-20% 5 4 2
20%-40% 0 1 3
40%-60% 0 0 0

117
60%-80% 0 0 0
80%-100% 0 0 0
arena en agua con cavitación y alcohol al 20%
tiempo de exposición Porcentaje de
valoración de limpieza 1 minuto 2 minutos 3 minutos
0-20% 1 1 1
20%-40% 4 2 1
40%-60% 0 2 3
60%-80% 0 0 0
80%-100% 0 0 0
Fuente: Autores
Esta prueba es bastante compleja ya que en algunos casos el alcohol ayuda a la
limpieza, tal como se ha comprobado; sin embargo, esto no significa que el alcohol
aumente el poder de la cavitación en el proceso de limpieza.
Como se ha tratado en el marco teórico, la fuerza de las implosiones de burbujas de
aire en un liquido (cavitación), está determinada entre otras cosas por la tensión
superficial del liquido, siendo así más fuerte la cavitación en un liquido con mayor
tensión superficial. En el caso de este experimento, el agua tiene una tensión
superficial de medida que es mucho menor en el alcohol
. Es por esto que por efectos de cavitación, el alcohol reduce la fuerza de la
implosión. No obstante, debido a las características químicas de este líquido, los
diferentes tipos de suciedad pueden ser removidos más fácilmente.
Según los datos mostrados en las tablas anteriores, el alcohol puede aumentar el
efecto limpiador, pero seguramente no es porque aumente el poder de la cavitación en
el líquido, siendo las características químicas del mismo, fundamentales para diluir y
despegar las partículas de suciedad sobre el elemento expuesto a ellas.
El cuarto experimento es el de la cavitación sobre el agua caliente, los resultados son
los siguientes:

118
Tabla 17. Cavitación en agua caliente.
aserrín en agua caliente con cavitación
tiempo de exposición Porcentaje de valoración de
limpieza
1 minuto
2 minutos
3 minutos
0-20% 4 2 1 20%-40% 1 2 2 40%-60% 0 1 2 60%-80% 0 0 0 80%-100% 0 0 0
arena en agua caliente con cavitación tiempo de exposición
Porcentaje de valoración de
limpieza
1 minuto
2 minutos
3 minutos
0-20% 0 0 0 20%-40% 4 3 2 40%-60% 1 2 3 60%-80% 0 0 0 80%-100% 0 0 0
esmalte en agua caliente con cavitación tiempo de exposición
Porcentaje de valoración de
limpieza
1 minuto
2 minutos
3 minutos
0-20% 5 4 2 20%-40% 0 1 3 40%-60% 0 0 0 60%-80% 0 0 0 80%-100% 0 0 0
tinta en agua caliente con cavitación tiempo de exposición
Porcentaje de valoración de
limpieza
1 minuto
2 minutos
3 minutos
0-20% 3 1 0 20%-40% 2 3 2 40%-60% 0 1 2 60%-80% 0 0 1 80%-100% 0 0 0
vaselina en agua caliente con cavitación tiempo de exposición
Porcentaje de valoración de
limpieza
1 minuto
2 minutos
3 minutos
0-20% 4 3 2 20%-40% 1 2 2
119
Fuente: Autores
Según los datos arrojados por este último experimento, el fenómeno de la limpieza se
incremento notablemente, y a diferencia del experimento con el alcohol, el agua
caliente puede mejorar el comportamiento de la cavitación dentro del contenedor.
Además del efecto del agua caliente sobre las diferentes superficies sucias, la
temperatura es un factor importante para la cavitación.
La cavitación, como ya se ha mencionado anteriormente, es producida por los cambios
de presión de un liquido con respecto a la presión atmosférica; es decir que, cuando
la presión inducida (en este caso por los transductores), es igual a la presión
atmosférica. Es por esto que el factor temperatura es importante, lo cual se muestra
claramente en la siguiente formula.
PV = nrT66
Es decir, si se aumenta la temperatura del agua se necesitará menos presión
atmosférica para generar cavitación, así en temperaturas cercanas al punto de
ebullición, la presión necesaria para crear cavitación acústica será menor
(aproximadamente 0,5 atmosferas al nivel del mar). Este fenómeno es claramente
influyente en el experimento realizado, puesto que aparte del comportamiento del agua
caliente sobre las superficies sucias, tenemos un claro aumento de cavitación dentro
del agua. Según los datos mostrados en las tablas anteriores, es posible comprobar
este fenómeno, ya que efectivamente los niveles de limpieza con agua caliente fueron
mucho más altos
Otro parámetro importante en estas pruebas es el del tiempo de exposición. Y según
lo visto en cada una de las pruebas, los efectos de limpieza son mejores a más tiempo
de exposición. Sin embargo, la exposición prolongada a la cavitación puede dañar,
66
Escuela de ciencias del mar , universidad católica de Valparaiso 1994 Variabilidad del viento, nivel del
mar y temperatura en la costa este de chile , Oscar Pizarro, Samuel Hormazabal, Antonio
Gonzalez,http://www.scielo.cl/scielo.php?pid=S0717-71781994002200007&script=sci_arttext&tlng=pt
(vi el 20 de octubre 2010)
40%-60% 0 0 1 60%-80% 0 0 0 80%-100% 0 0 0

120
corroer, manchar o erosionar las piezas expuestas; razón por la cual no se recomienda
tener baños ultrasónicos mayores a los 3 o 4 minutos.
Según los datos obtenidos en las pruebas anteriores es posible determinar las
tendencias de limpieza del dispositivo a tratar en este proyecto de grado, para esto es
necesario realizar una distribución de frecuencias. Para lo cual se utilizaran lo valores
obtenidos en cada uno de los tres experimentos donde hubo cavitación, en un total de
75 muestras diferentes (25 muestras por experimento, 5 repeticiones por tipo de
suciedad).
Figura 52. Cavitación en un galón de agua.
Fuente: Autores
Tabla 18. Cavitación en un galón de agua.
Porcentaje de valoración de
limpieza
1 minuto 2 minutos 3 minutos
f F fr Fr f F fr Fr f F fr Fr
0-20 18 18 0,72 0,72 15 15 0,6 0,6 9 9 0,36 0,36
20-40 7 25 0,28 1 7 22 0,28 0,88 10 19 0,4 0,76
40-60 0 25 0 1 3 25 0,12 1 5 24 0,2 0,96
60-80 0 25 0 1 0 25 0 1 1 25 0,04 1
80-100 0 25 0 1 0 25 0 1 0 25 0 1
Fuente: Autores
18
7
0 0 0
15
7
3
0 0
910
5
10
0-20 20-40 40-60 60-80 80-100
Cavitación en un galón de agua
1 minuto 2 minutos 3 minutos

121
Donde:
f es la frecuencia estadística.
F es la frecuencia relativa.
fr es la frecuencia acumulada.
Fr es la frecuencia relativa acumulada.
Figura 53. Cavitación con 20% de alcohol.
Fuente: Autores
Tabla 19. Cavitación con 20% de alcohol.
Porcentaje
de valoración de limpieza
1 minuto 2 minutos 3 minutos
f F fr Fr f F fr Fr f F fr Fr
0-20 20 18 0,8 0,8 17 15 0,68 0,68 10 10 0,4 0,4
20-40 5 25 0,2 1 5 22 0,2 0,88 11 21 0,44 0,84
40-60 0 25 0 1 3 25 0,12 1 4 25 0,16 1
60-80 0 25 0 1 0 25 0 1 0 25 0 1
80-100 0 25 0 1 0 25 0 1 0 25 0 1
Fuente: Autores
20
5
0 0 0
17
53
0 0
10 11
4
0 0
0-20 20-40 40-60 60-80 80-100
Cavitación con 20% de alcohol
1 minuto 2 minutos 3 minutos

122
Figura 54. Cavitación con agua caliente.
Fuente: Autores
Tabla 20. Cavitación con agua caliente.
Porcentaje
de valoración de limpieza
1 minuto 2 minutos 3 minutos
f F fr Fr f F fr Fr f F fr Fr
0-20 16 18 0,64 0,64 10 15 0,4 0,4 5 5 0,2 0,2
20-40 8 25 0,32 0,96 11 22 0,44 0,84 11 16 0,44 0,64
40-60 1 25 0,04 1 4 25 0,16 1 8 24 0,32 0,96
60-80 0 25 0 1 0 25 0 1 1 25 0,04 1
80-100 0 25 0 1 0 25 0 1 0 25 0 1
Fuente: Autores
De la misma manera es posible agrupar todos estos datos permitiendo simplificar toda
la información recolectada obteniendo así los siguientes datos.
16
8
10 0
1011
4
0 0
5
11
8
10
0-20 20-40 40-60 60-80 80-100
Cavitación con agua caliente
1 minuto 2 minutos 3 minutos

123
Figura 55. Cavitación promedio.
Fuente: Autores
Tabla 21. Cavitación promedio.
Porcentaje
de valoración de limpieza
1 minuto 2 minutos 3 minutos
f F fr Fr f F fr Fr f F fr Fr
0-20 54 54 0,72 0,72 42 42 0,56 0,56 24 24 0,32 0,32
20-40 20 74 0,2667 0,9867 23 65 0,307 0,867 32 56 0,427 0,7467
40-60 1 75 0,0133 1 10 75 0,133 1 17 73 0,227 0,9733
60-80 0 75 0 1 0 75 0 1 2 75 0,027 1
80-100 0 75 0 1 0 75 0 1 0 75 0 1
Fuente: Autores
De los datos anteriores se puede decir que el dispositivo de limpieza concentra su
efecto de limpieza a tiempos de exposición menores a los tres minutos, entre 0 y 40%
de efectividad. Sin embargo para poder obtener datos más concretos es necesario
simplificar estos datos una vez más dando como resultado lo siguiente:
0
10
20
30
40
50
60
0-20 20-40 40-60 60-80 80-100
Cavitación promedio
1 minuto
2 minutos
3 minutos

124
Tabla 22. Cavitación promedio simplificada.
Porcentaje
de valoración de limpieza
f F fr Fr
0-20 120 120 0,533 0,5333
20-40 75 195 0,333 0,8667
40-60 28 223 0,124 0,9911
60-80 2 225 0,009 1
80-100 0 225 0 1
Fuente: Autores
Con todos los 75 datos del experimento realizado simplificados en la tabla anterior, es
posible determinar que en puntillas, con los tipos de suciedad ya mencionados, y con
las diferentes variables como la temperatura del agua, la disolución de otros líquidos
aparte del agua, y el tiempo de exposición; el dispositivo de limpieza por cavitación
acústica citado en este proyecto tiene el comportamiento mostrado en la siguiente
grafica.
Figura 56. Comportamiento final del prototipo de cavitación.
Fuente: Autores
Esta grafica es bastante clara al mostrar que el dispositivo limpia en mayor proporción
entre 0 y 20% y va reduciendo esta proporción a medida que la eficiencia de
53%33%
13% 1%
comportamiento final del prototipo de
cavitación
0-20
20-40
40-60
60-80
80-100

125
cavitación se incrementa. Es posible decir que la tendencia de eficiencia de esta
máquina de ultrasonido se encuentra entre 10% y un 40% de limpieza.
Es común el cuestionarse sobre la veracidad de la limpieza por cavitación, puesto que
como es bien sabido, el agua por si sola puede eliminar por si sola cierta cantidad de
suciedad. Además, como ya se ha explicado anteriormente es imposible determinar el
grado de limpieza que pueda alcanzar este prototipo de manera objetiva.
La mejor manera de determinar si la cavitación toma parte en un líquido (sin la
utilización de cavitometro), es la de colocar papel aluminio dentro del contenedor. De
esta manera, tal y como se muestra en la imagen anterior, el papel aluminio se
descompone aleatoriamente.
Antes de profundizar en este fenómeno, es de suma importancia tener en cuenta que
la limpieza por ultrasonido es producto de la implosión de las burbujas de aire dentro
de un liquido, estas burbujas tienen dimensiones microscópicas (los cual dificulta
observar el fenómeno), y en el momento de su colapso, liberan energía y calor. Es
precisamente la onda de choque (con presiones de 20.000 psi) liberada por la burbuja
la que choca con el objeto a limpiar, removiendo de esta manera las partículas
expuestas al fenómeno.
En la siguiente figura se muestra el deterioro de la lámina de papel aluminio en un
periodo de exposición de 10 minutos, dentro del tanque contenedor. Esta prueba es
fundamental para comprobar si la cavitación posee la energía necesaria para eliminar
las partículas de suciedad, puesto que es la misma fuerza que está deteriorando el
aluminio, quitando de esta manera el interrogante anteriormente comentado, ya que es
imposible que el agua produzca un fenómeno similar en un periodo de tiempo tan
pequeño.

126
Figura 57. Papel aluminio expuesto a 10 minutos de cavitación.
Fuente: Autores
Figura 58. Lamina de aluminio expuesta a 10 minutos de cavitación
Fuente: Autores

127
5.3 Efectividad del prototipo de cavitación acústica.
Como se ha mostrado anteriormente, el prototipo de cavitación acústica descrito en
este proyecto de grado, alcanza un nivel de efectividad que oscila en el 40%, y en
algunos casos 60% (en condiciones propicias como agua caliente, un disolvente, por
lo menos tres minutos de exposición y un tipo de suciedad fácil de remover). No
obstante, estos resultados distan de los valores expuestos por los diferentes
fabricantes y la bibliografía existente, pues en estos se habla de una limpieza mayor al
90%.
Sin embargo, en la construcción de este prototipo, fue posible la comprobación de dos
fenómenos que pueden explicar este resultado. Dichos fenómenos son la amplitud de
la onda y la densidad de cavitación.
5.3.1 Amplitud de la onda.
La amplitud tiene una relación directa con la cantidad y potencia de cavitación dentro
del contenedor; teniendo así más cavitación con más voltaje de entrada. Además, si se
tiene en cuenta que la amplitud de la onda depende del voltaje de entrada del circuito
electrónico, igualmente se puede afirmar, que en el circuito diseñado en este proyecto
de grado, el voltaje de entrada, será el factor directamente responsable de la
generación de cavitación acústica.
Este fenómeno se comprobó exponiendo una lámina de papel aluminio con dos
voltajes de entrada diferentes en lapsos de tiempo iguales. La primera prueba fue
realizada con un voltaje de entrada de140vpp (con la ayuda de un variac), se expuso
una lámina de aluminio durante tres minutos.
La segunda prueba es con el voltaje de entrada de la red domestica, 110vpp. De la
misma manera se expuso una lámina de papel aluminio a tres minutos de cavitación.
Los resultados son mostrados en la imagen siguiente.

128
Figura 59. Cavitación con 120vpp y 140vpp.
Fuente: Autores
El incremento de la fuerza cavitatoria con relación al voltaje es evidente, ya que la
cantidad y tamaño de los orificios creados en el papel aluminio es mayor con mayor
voltaje de entrada.
Según la disposición y el comportamiento de los transductores piezoeléctricos
utilizados en el prototipo, el fenómeno de la piezo electricidad se encuentra ligado a
las tensiones positivas y negativas que deforman las cerámicas (generando una
vibración ultrasónica) una razón más para decir que el voltaje es fundamental para la
generación de cavitación. Aunque el fabricante no dice el voltaje máximo de entrada
que el transductor sea capaz de soportar, según las especificaciones de otros
transductores similares, se sabe que dicho voltaje podría ser mayor a los 300vpp.
De la misma forma, si se compara el voltaje que se maneja en el prototipo con el
mencionado anteriormente, se puede concluir que es bastante bajo, y por ende la
efectividad de limpieza no será la mejor; no obstante, el circuito diseñado es capaz de
generar la señal ultrasónica con mayor amplitud (teniendo en cuenta el voltaje de
operación de algunos dispositivos electrónicos), instalando un transformador de voltaje

129
en la entrada del circuito de amplificación. De esta manera, se garantizará un
porcentaje de efectividad mayor al generado por los 110vpp mostrados en el proyecto.
5.3.2 Densidad de Cavitación.
Se llamará densidad de cavitación, a la cantidad de burbujas o actividad cavitatoria
que tiene lugar en un líquido. Este parámetro es imposible de medir objetivamente sin
la ayuda de un cavitometro; sin embrago, el prototipo tratado en este proyecto de
grado permite evidenciar visualmente, el comportamiento del agua cuando se le
induce una frecuencia ultrasónica, con relación a la densidad de cavitación.
Es posible visualizar dos características importantes; la primera es la presencia de
burbujas distribuidas en todo el líquido contenedor, inclusive en los sectores más
alejados del transductor se puede detallar la presencia de burbujas oscilando a la
frecuencia de operación (como si estuvieran levitando en el agua); la segunda
característica, y la que sin duda alguna determina la efectividad de limpieza que el
prototipo es capaz de generar, es la creación de un vórtice de cavitación, el cual se
presenta sobre cada uno de los transductores; dicho vórtice de cavitación, es en
donde la máxima energía cavitatoria tiene lugar, por ende, es el lugar en donde se
genera la mejor limpieza ultrasónica dentro del contenedor. Las dimensiones de los
vórtices no son constantes, pero oscila entre los 20 .
Como ya se ha mencionado anteriormente, la cantidad de energía cavitatoria depende
directamente del voltaje de entrada en el circuito de amplificación, igualmente la
densidad de cavitación dependerá de dicha magnitud; si bien el voltaje de 110vpp que
alimenta, este prototipo es suficiente para proporcionar el efecto de cavitación, no es
suficiente para proporcionar una densidad de cavitación adecuada para obtener
niveles de limpieza superiores.

130
CONCLUSIONES
La cavitación acústica es un fenómeno sonoquímico, que está presente en toda
la naturaleza; y a pesar de sus propiedades corrosivas en la industria humana,
es posible generar este fenómeno de una manera controlada y aplicable a los
distintos requerimientos.
La limpieza por cavitación acústica, se encuentra directamente relacionada a
varios factores que influyen en su comportamiento; como los son los acústicos,
en donde se tienen en cuenta la fuente ultrasónica, el tipo de onda o señal a
utilizar y la superficie transductora; factores electrónicos en la generación
ultrasónica, como la ganancia de voltaje, la potencia del transductor y la
frecuencia de operación; factores en el liquido contenedor como la
temperatura, el volumen del agua y demás características químicas del mismo;
el tiempo de exposición a la cavitación y factores exógenos como el tipo de
suciedad a remover, en los diferentes elementos expuestos a este fenómeno.
El prototipo de limpieza por cavitación acústica presentado en este proyecto,
puede llegar a una efectividad de limpieza en condiciones óptimas (agua con
temperatura cercana al punto de ebullición, tres minutos de exposición y la
ayuda de un disolvente) de 40%.
El prototipo de limpieza por cavitación acústica, propuesto en este proyecto,
tiene como valor agregado, que para tan un volumen de agua tan pequeño, se
está utilizando una transductor adicional que el requerido por las formulas,
además de estar operando directamente sobre el agua o liquido contenedor;
esto con el fin de ofrecer un mayor fuerza cavitatoria en el interior del tanque y
poder obtener así un mejor índice de limpieza.
Para el buen funcionamiento de los transductores ultrasónicos piezoeléctricos,
con generadores del tipo inversor de medio puente, es necesario realizar un
acople de impedancias, ya que la carga capacitiva de los transductores no es
compatible con la señal generada por el circuito electrónico. En este acople es
necesario ubicar una carga de impedancia que estabilice la señal antes de ser

131
enviada al transductor piezoeléctrico. Para efectos del funcionamiento del
proyecto en mención, dicho acople fue logrado con un bombillo de 100 watts.
La potencia mínima requerida para generar cavitación acústica, dentro de un
contenedor con capacidad de un galón, es de 63,37 watts.
El prototipo presentado en este proyecto de grado, es capaz de generar la
potencia necesaria para garantizar el efecto de la cavitación acústica, en un
volumen de de agua de 5,67 galones.

132
RECOMENDACIONES
A lo largo de este trabajo de grado, se ha podido referenciar la importancia del
transductor ultrasónico en la generación de cavitación de manera controlada. Este
transductor debe contar con una frecuencia de operación ultrasónica que oscile entre
los 20KHz y los 100KHz.
Según los resultados mostrados en este proyecto de grado, la efectividad de limpieza
está relacionada con la potencia generada por el transductor; si bien, se demostró que
dicho factor depende del voltaje de entrada, se recomienda utilizar una fuente de
voltaje de 220vpp. Este voltaje puede ser proporcionado con una conexión directa a la
red de 220 o con la instalación de un transformador de voltaje de 110vpp a 220vpp en
la alimentación eléctrica del circuito de amplificación.
Otra consideración importante es la instalación de un interruptor regulador, esto con el
fin de controlar el flujo de corriente que entra a todo el montaje electrónico. Ya que
cuando se conecta el dispositivo, la descarga de corriente es bastante brusca.
Si se pretende utilizar este dispositivo en un ámbito industrial, es importante que la
construcción del contenedor sea en acero inoxidable, como primera medida por su
capacidad de transducir la energía supersónica juntamente con el transductor.
Juntamente con el tanque, es importante disponer de una cesta para colocar los
objetos a limpiar, a una distancia de tres o cuatro centímetros del fondo del
contenedor.
Este proyecto es tan solo un punto de partida para futuras investigaciones, en el
campo de las ondas ultrasónicas y en general del estudio del ultrasonido, en
cualquiera de sus aplicaciones y ciencias de estudio, convirtiéndose en un campo
amplio de investigación para la carrera de ingeniería de sonido.

133
BIBLIOGRAFÍA
LURTON, Xavier. An introduction to Underwater Acoustics. Principals and
applications.Chichester, UK: Springer y Praxis Publishing, 2002.
URICK, Robert J. ―Principals of underwater sound‖ 3er edición. Península
Publishing. Los altos, California. 1983.
ROBBER, Robert J. Underwater Electroacoustics Measurements. Los altos:
Península. Publishing, June 1990.
ROSS, Donald. ―Mechanics of Underwater Noise‖ 1ra edición. Península
publishing. Los altos, California. 1976. 36p.
L.D. ROSEMBERG, el ultrasonido y sus aplicaciones; Traducción directa del
ruso. Eugenia Fisher; Editorial Lautaro, 1958. 110-115p.
A.P. CRACKNELL, Ultrasonidos. Madrid: Paraninfo, 1983. 67p.
INSTITUTO DE ACÚSTICA, desarrollo de sistemas acústicos para el
tratamiento de fluidos. Escalamiento de prototipos de laboratorio a sistema
industrial. Paper disponible en
www.digital.csic.es/bitstream/10261/7133/1/ult26.pdf, [Consultado el 30 de abril
de 2009].
G RODRIGUEZ, E. RIERA, aplicaciones industriales de los ultrasonidos de
potencia. Paper disponible en www.sea-acustica.es/revista/volxxxi34/11.pdf,
[consultado el 23 de abril de 2009].
PETER D. Edmonds, Ultrasonics. Editorial Academic Press; 1981, 87-92p.
GAITAN, Dario. An experimental investigation of acoustic cavitation in gaseous
liquids. Editorial Ann Arbor: University Microfilms Internartional. 1990, 120-
135p.
HEMARDINGER, Pierre. Técnicas Ultrasónicas: Generadores de
Ultrasonido. Ed. Barcelona. Edición hispano Europea.1968.
MORRIS SILVA, Ignacio y TIBAVISCO SALAMANCA, Ronald.
Desarrollo de un sistema de ultrasonido para control y manejo de la
broca del café. Bogotá D.C., 2005, 134 p. Trabajo de grado (Ing.
Mecatronica). Universidad de San Buenaventura. Facultad de Ingeniería.

134
Diana; LUQUE LONDOÑO, Daniel y ARDILA ORDUZ, Jorge. Diseño y
construcción de un vehículo autónomo tipo rover. En: Ingenium: Revista
de la facultad de Ingeniería. Año 7, No. 14 (julio-diciembre 2006); p. 38.
MOSQUERA, Jaime. Sistema de adquisición de datos provenientes de
un transductor de ultrasonido de alta frecuencia. Bogotá D.C., 2009, 16
p. Trabajo de grado (Tecnología en electrónica). Universidad de San
Buenaventura. Facultad de Ingeniería.
MUHAMMAD H. Rashid. Electrónica de potencia circuitos, dispositivos y
aplicaciones. México: Tercera edición, 2004.
Y.WU, C. Franklin, M bran and B. Fraser. ACOUSTIC PROPERTY
CHARACRIZATION OF A SINGLE WATER MEGASONIC CLEANER.
Vertec Inc., Santa Ana, CA.
LORD RAYLEGHT (John W. Strutt). The Theory Of Sound .Vol 1 y 2. Dober
Publicatios. New York 1968.
J. David N. Cheeke. Fundamental And Applications Of Ultrasonic Waves. CRG
Press 2002.
Miguel Ángel Barceló; Jeroni Morey Salva. Los ultrasonidos: sus riesgos
y normas de prevención. Mapfre seguridad N 90, 2003
GAITAN, Felipe Dario. An experimental investigation of acoustic cavitation in
gaseous liquids. Editorial Ann Arbor: University Microfilms International 1990.
Universidad de Cardiff. Sheridan Morgan 2010. la radiación ultrasónica.
Brennen, Cristopher Earls. Cavitation and Bubble Dynamics. Oxford
University Press 1995.
Bajram Zeqiri, Acoustics Team, Quality of Life Division, National Physical
Laboratory, Tedington Middlesex, United Kingdom. A Referece Vessel
For Acoustic Cavitation: Initial Characterization Of The Spatial
Distribution Of Cavitation Activity Derived Using An Acoustic Emission
Sensor. Industrial Session Abstracts. Monday, 13 Marzo 2006.

135
Azar, Lawrence. Cavitation in Ultrasonic Cleaning and Cell Disruption.
Controlled Environments, Febrero 2009.
Gallego Juárez, Antonio; Nájera Vázquez de Parga, Gonzalo; Rodríguez
Corral, Germán; Vázquez Martínez, Fernando y Vlist, Piet Van der.
Procedimiento Y Dispositivo De Lavado Por Ultrasonido De Textiles En
Continuo. Traducción de patente europea, España Enero 2003.
Technical University of Liberec. Physics Department. Cavitation Noise
Modeling and Analyzing. Republica Checa 2002.
J.T.Karsulovic, A. Bozo, J. Araya, Y. Vargas, V. Gaete, B. Tejer.
Aplicación de ondas sónicas u ultrasónicas como medio de control del
ataque de termitas subterráneas. Maderas. Ciencia y tecnología, 2008.
Azar, Lawrence. Understanding and Evaluating ultrasonic and
megasonic cleaners. Process Cleaning Magazine. September 2007.
Clangsonic, transducer characteristics, en
http://www.clangsonic.com/features_en.asp (consultado en 20 agosto
2010).

136
ANEXOS
ANEXOS 1
NTP 205: Ultrasonidos: exposición laboral
Redactor:
Manuel Gómez-Cano Hernández Ingeniero Industrial
Objetivo
El objeto de esta Nota Técnica de Prevención es dar a conocer a los diferentes
colectivos que tengan que abordar un problema por exposición laboral a ultrasonidos,
cuales son los riesgos que se pueden presentar, así como de los distintos métodos de
evaluación descritos en la actualidad, indicar aquellos que se consideran desde el
punto de vista práctico más apropiados para por último pasar a enumerar algunas
medidas generales de control.
Introducción
La exposición laboral a ultrasonidos no ha tenido hasta hace relativamente pocos años
un eco importante debido a dos causas fundamentales, una su poca aplicación en
procesos industriales y otra a que los que se utilizaban eran de baja potencia y por lo
tanto en un principio no implicaban un riesgo apreciable para la salud. Sin embargo las
últimas innovaciones tecnológicas han hecho que se haya aumentado
considerablemente su campo de aplicación, debiéndose considerar entonces los
posibles riesgos que pueden presentar para las personas expuestas.
Aunque hoy en día los riesgos son teóricamente conocidos se siguen realizando
numerosas investigaciones sobre ello sin que hasta la fecha se haya podido establecer
una respuesta exacta sobre cuáles son los límites seguros de exposición y los posibles
daños producidos.
Conceptos físicos de ultrasonidos
El oído humano es capaz de detectar los sonidos comprendidos en un margen de
frecuencia entre 20 y 20.000 Hz. Los sonidos emitidos en un rango superior al ya

137
citado y que no son percibidos por el oído humano como sonidos, se conocen con el
nombre de ultrasonidos. Ahora bien este tipo de sonidos puede llevar aparejados una
serie de armónicos de frecuencias comprendidas dentro del rango de audición, por lo
que al estudiar los efectos sobre la salud producidos por los ultrasonidos se suele
hacer no sólo aisladamente, sino en el conjunto de sonidos agudos y muy agudos
(generalmente a partir de 10 Khz.) y ultrasonidos en un sentido físico más estricto (de
frecuencia superior a 20 Khz.).
Los ultrasonidos, como movimiento ondulatorio que son, tienen básicamente las
mismas propiedades físicas que las ondas sonoras, pero en base a su mayor
frecuencia y por tanto menor longitud de onda se difractan en menor medida que las
ondas sonoras audibles así como son más fácilmente reflejadas por superficies planas
y son más rápidamente absorbidas por el aire y en consecuencia no son transmitidas a
muy largas distancias.
La velocidad de propagación de los ultrasonidos en el aire a la temperatura ambiental
es igual a la de los sonidos audibles, considerándose un valor del orden de 343 m/s.,
en tanto que su velocidad de propagación en un medio líquido como es el agua es
mayor, pudiéndose considerar aproximadamente un valor de 1.500 m/s.
Todas estas propiedades van a tener gran importancia tanto a la hora de evaluar como
controlar un problema de exposición laboral a ultrasonidos.
Fuentes de generación y aplicaciones
Aunque existen fuentes de generación natural o procesos que puedan producir en su
operación cierto tipo de ultrasonidos, vamos a considerar únicamente aquellos que son
producidos para su aplicación en procesos u operaciones industriales caracterizados
por estar comprendidos en unos rangos de frecuencia e intensidad de lo Khz. a 10
MHz y 10-3 a 105 W/cm2 respectivamente.
A la hora de clasificar las fuentes de generación de ultrasonidos parece apropiado
realizarla en función de su frecuencia pudiéndose establecer entonces tres grandes
grupos a saber:
• Baja frecuencia (comprendidos entre 10 y 100 Khz.) siendo los que desde el
punto de vista industrial tienen mayores aplicaciones.

138
• Media frecuencia (de un rango de 100 Khz. a 10 MHz) de uso en aplicaciones
terapéuticas.
• Alta frecuencia (abarca desde 1 MHz a 10 MHz) estando sus aplicaciones
principales en fines médicos y aparatos de control no destructivo.
Dado que la mayoría de los usos industriales así como los problemas planteados para
la salud se producen en el rango de baja frecuencia se va a centrar el estudio de esta
Nota en los producidos en este rango.
En lo que respecta a sus aplicaciones en la Tabla 1, se resumen algunas de las más
comunes, así como los intervalos de frecuencia e intensidad utilizados.
Tabla 1. Aplicaciones más comunes de ultrasonidos con frecuencias de operación.
Efectos sobre la salud
Los efectos que pueden producir una exposición a ultrasonidos pueden diferenciarse
en función de cuál sea su vía de transmisión a saber:
• Por contacto principalmente manifestada en las manos, en las operaciones de
limpieza y desengrase.
• Por vía aérea tanto en las operaciones señaladas como en el resto de la
mayoría de operaciones de uso industrial.
La exposición laboral a ultrasonidos transmitidos por contacto y que se manifiestan en
el organismo como alteraciones funcionales del sistema nervioso, dolores de cabeza,

139
vértigo, fatiga, modificaciones de reflejo, turbulaciones vasomotoras, periféricas,
pueden causar un daño de calentamiento de la piel e incluso de los huesos o daños
celulares con destrucción de las propias células por un fenómeno de cavitación.
Respecto a la exposición por vía aérea a ultrasonidos puede producir efectos
biológicos que se manifiestan en el desarrollo anormal de las células, efectos
hematológicos, efectos genéticos y sobre el sistema nervioso, con una sintomatología
semejante a la manifestada en la exposición por contacto. Asimismo no es de
desechar el posible desplazamiento de la audición debido a las componentes sonoras
que pueden acompañar a los ultrasonidos.
Sistemas de medida
A la hora de abordar un problema de medición de niveles de exposición de
ultrasonidos habría que considerar cuál es su camino de transmisión bien sea por vía
aérea o por contacto.
La medición de los niveles de ultrasonidos transmitidos por vía aérea se realizan en la
actualidad con sonómetros o medidores de ultrasonidos capaces de medir con
fiabilidad los niveles de presión sonora expresados en dB en el rango de frecuencia de
generación de éstos con la particularidad de que dichas mediciones deben ser
efectuadas en tercios de banda de octava, así como que el micrófono utilizado deba
tener una respuesta lo más plana posible en el rango de frecuencia a estudiar.
Habría que considerar que los sonidos agudos y muy agudos del orden de 10 Khz. y
mayores, también deberían ser medidos en base a la similitud de efectos que tienen
sobre el organismo humano, mediciones que se deben efectuar con un medidor de
nivel de presión sonora con un filtro de bajo paso y respuesta en la escala de
ponderación A.
Con respecto a la medición de los ultrasonidos transmitidos por contacto el problema
se hace más complejo al deberse considerar como parámetros de medida la potencia
o la intensidad acústica parámetros difícil en la práctica de cuantificar.
No obstante actualmente se suele medir la intensidad de forma puntual mediante la
utilización de equipos de muestreo unidos a micrófonos piezoeléctricos en miniatura.

140
Límites de exposición
Aunque en la actualidad existe diversidad de criterios más o menos coincidentes para
valorar una exposición laboral a ultrasonidos vamos a referirnos a aquellos que por su
aplicación práctica nos parecen más apropiados.
Límites de exposición a ultrasonidos transmitidos por contacto
Utilizaremos el criterio citado por Nyborg en 1978 que establece para diferentes
tiempos de exposición los niveles de intensidad acústica máximos recomendables por
debajo de los cuales considera que las personas expuestas no sufrirán efectos
biológicos considerados como peligrosos.
Este criterio, que queda reflejado en la figura 1, considera con independencia del
tiempo de exposición 100 mW/cm2 como el valor límite umbral por debajo del cual no
se aprecian efectos biológicos, así como considera que se deben evitar exposiciones a
intensidades mayores de 10 W/cm2.
Limites de exposición por contacto propuesto por Nyborg en 1978
Límite de exposición a ultrasonidos por vía aérea
Referente a los límites de exposición a ultrasonidos por vía aérea existen
reglamentaciones o recomendaciones en varios países que pudieran tener ciertas
similitudes. Ante lo extenso y poco operativo que resultaría el considerar algunas de
estas recomendaciones por separado, parece lo más acertado el considerar para la
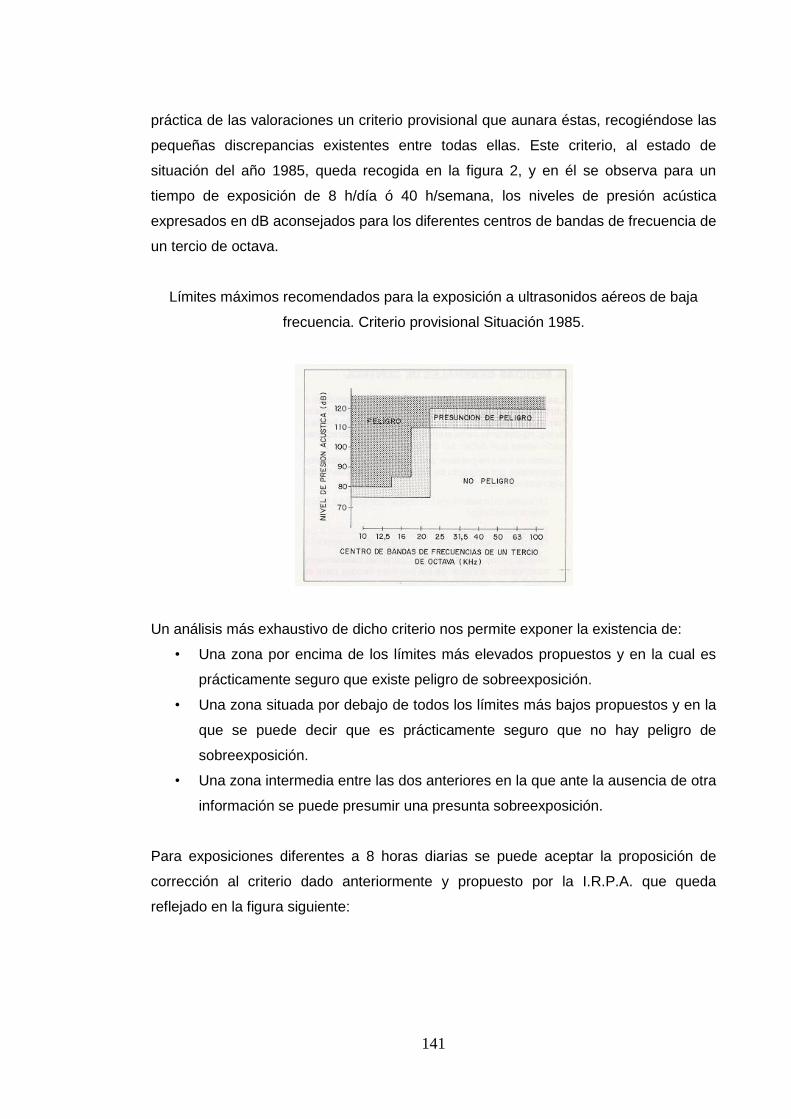
141
práctica de las valoraciones un criterio provisional que aunara éstas, recogiéndose las
pequeñas discrepancias existentes entre todas ellas. Este criterio, al estado de
situación del año 1985, queda recogida en la figura 2, y en él se observa para un
tiempo de exposición de 8 h/día ó 40 h/semana, los niveles de presión acústica
expresados en dB aconsejados para los diferentes centros de bandas de frecuencia de
un tercio de octava.
Límites máximos recomendados para la exposición a ultrasonidos aéreos de baja
frecuencia. Criterio provisional Situación 1985.
Un análisis más exhaustivo de dicho criterio nos permite exponer la existencia de:
• Una zona por encima de los límites más elevados propuestos y en la cual es
prácticamente seguro que existe peligro de sobreexposición.
• Una zona situada por debajo de todos los límites más bajos propuestos y en la
que se puede decir que es prácticamente seguro que no hay peligro de
sobreexposición.
• Una zona intermedia entre las dos anteriores en la que ante la ausencia de otra
información se puede presumir una presunta sobreexposición.
Para exposiciones diferentes a 8 horas diarias se puede aceptar la proposición de
corrección al criterio dado anteriormente y propuesto por la I.R.P.A. que queda
reflejado en la figura siguiente:

142
Tolerancias suplementarias aceptables para exposiciones continúas a ultrasonidos
aéreos de baja frecuencia situación 1985
Dicho criterio basado en el principio de la isoenergía (misma energía acústica
percibida en el transcurso de la jornada) incrementa a los niveles indicados
anteriormente una cierta cantidad de intensidad en función de la disminución de la
exposición diaria, incrementando para exposiciones de muy corta duración un máximo
de 9 dB.
Medidas generales de control
Las medidas generales de control para una exposición a ultrasonidos son en base a la
similitud de las propiedades físicas con los sonidos semejantes a la actuación frente a
estos, no obstante señalaremos algunas consideraciones particulares que deben ser
tratadas.
Cuando se trata de prevenir una exposición a ultrasonidos transmitidos por contacto se
deberán tener en cuenta los siguientes puntos:
Una selección adecuada del equipo apropiado a la función a desarrollar.
Posibilitar en la medida de lo posible una automatización del proceso que evite
una exposición innecesaria.
Utilización de los equipos por personal debidamente cualificado y conocer de
los posibles riesgos para su salud de un contacto inadecuado.
Colocación de una señalización conveniente de las zonas donde existan focos
o equipos emisores de ultrasonidos.
Colocación de tapas a los equipos cuando no sea necesario su funcionamiento.

143
Cuando se trate de ultrasonidos transmitidos por vía aérea se deberán tener en
consideración además de las medidas semejantes de lucha contra el ruido las
siguientes:
Efectuar guías o normas de trabajo.
Colocar de encerramientos parciales o totales, pantallas o absorbedores para
reducir los ultrasonidos.
Alejamiento del foco productor.
Reducción del tiempo de exposición.
Utilización de protección personal para el aparato auditivo.

144
ANEXO 2

145
ANEXO 3

146
ANEXO 4

147
ANEXO 5

148
ANEXO 6

149

150

151

152

153

154

155
ANEXO 7

156

157

158

159

160

161

162

163
ANEXO 8
ANEXO 9

164
ANEXO 10
ANEXO 11

165
ANEXO 12

166