traduccion art 2.docx
19
Los vectores de fuerza del pulgar punta fundamentales producidos por los músculos del pulgar Abstracto Una descripción rigurosa de la magnitud y dirección del vector fuerza 3D cada músculo del pulgar produce en el pulgar punta es necesario entender las consecuencias biomecánicas pellizcar de una variedad de las parálisis y procedimientos quirúrgicos (como las transferencias del tendón). En este estudio, hemos caracterizado el vector de fuerza 3D cada músculo produce en el pulgar de punta, y se investigó si estos vectores de fuerza pulgar de punta a escala linealmente con la tensión del tendón. En 13 muestras de cadáver, que mide la fuerza del pulgar punta vector de salida 3D producida por cada tendón que actúa sobre el dedo pulgar, además de dos transferencias comunes del tendón, como una función de la tensión del tendón de entrada. Después de fijar la mano a una estructura rígida, montamos el pulgar configurándolo en clave u oposición estandarizada postura pellizco y acoplando el pulgar punta a un sensor de fuerza / par de 6 grados de libertad se mantienen rígidos . Actuadores lineales aplica tensión a los tendones distales de los cuatro músculos del pulgar extrínsecos, y para seis cuerdas de nylon que reproducen las líneas de acción de (i) los cuatro músculos del pulgar intrínsecos y (ii) dos transferencias alternativas tendón utilizan comúnmente para restaurar la oposición del pulgar siguientes baja La parálisis del nervio mediano. Cada actuador lineal controlado por ordenador en rampa de tensión del tendón de cero a un tercio de la fuerza muscular máxima predicha esperado en cada tendón, y de vuelta a cero, mientras que se midió el vector de fuerza en el pulgar 3D- tip. En los ensayos de prueba / repetición de la prueba, vimos vectores de fuerza del pulgar punta eran bastante sensibles a procedimiento de montaje, sino también sensible a las variaciones en los asientos de las superficies articulares . Encontramos que: (i) algunos vectores de fuerza del pulgar punta actúan en direcciones inesperadas (por ejemplo, el vector de fuerza opponens
-
Upload
lis-quevedo -
Category
Documents
-
view
246 -
download
3
Transcript of traduccion art 2.docx

Los vectores de fuerza del pulgar punta fundamentales producidos por los músculos del pulgar
Abstracto
Una descripción rigurosa de la magnitud y dirección del vector fuerza 3D cada músculo del pulgar produce en el pulgar punta es necesario entender las consecuencias biomecánicas pellizcar de una variedad de las parálisis y procedimientos quirúrgicos (como las transferencias del tendón). En este estudio, hemos caracterizado el vector de fuerza 3D cada músculo produce en el pulgar de punta, y se investigó si estos vectores de fuerza pulgar de punta a escala linealmente con la tensión del tendón. En 13 muestras de cadáver, que mide la fuerza del pulgar punta vector de salida 3D producida por cada tendón que actúa sobre el dedo pulgar, además de dos transferencias comunes del tendón, como una función de la tensión del tendón de entrada. Después de fijar la mano a una estructura rígida, montamos el pulgar configurándolo en clave u oposición estandarizada postura pellizco y acoplando el pulgar punta a un sensor de fuerza / par de 6 grados de libertad se mantienen rígidos. Actuadores lineales aplica tensión a los tendones distales de los cuatro músculos del pulgar extrínsecos, y para seis cuerdas de nylon que reproducen las líneas de acción de (i) los cuatro músculos del pulgar intrínsecos y (ii) dos transferencias alternativas tendón utilizan comúnmente para restaurar la oposición del pulgar siguientes baja La parálisis del nervio mediano. Cada actuador lineal controlado por ordenador en rampa de tensión del tendón de cero a un tercio de la fuerza muscular máxima predicha esperado en cada tendón, y de vuelta a cero, mientras que se midió el vector de fuerza en el pulgar 3D-tip. En los ensayos de prueba / repetición de la prueba, vimos vectores de fuerza del pulgar punta eran bastante sensibles a procedimiento de montaje, sino también sensible a las variaciones en los asientos de las superficies articulares. Encontramos que: (i) algunos vectores de fuerza del pulgar punta actúan en direcciones inesperadas (por ejemplo, el vector de fuerza opponens es paralela a la falange distal), (ii) las dos transferencias tendinosas producen patentemente diferentes vectores de fuerza, y (iii) para la mayoría de los músculos, los vectores de fuerza del pulgar punta no se escalan linealmente con la tensión del tendón - probablemente debido a los caminos dependientes de la carga del tendón viscoelástico, la junta de asiento y / o el movimiento de los huesos. Nuestros datos vigor vectoriales 3D proporcionan las primeras descripciones de referencia cuantitativos de los vectores de fuerza pulgar punta producidos por todos los músculos del pulgar y dos transferencias tendinosas. Llegamos a la conclusión de que puede que no sea realista asumir en modelos biomecánicos que los vectores de fuerza del pulgar punta escalan linealmente con las tensiones del tendón, y que nuestros datos sugieren el pulgar puede actuar como un '' dígitos flotante '' afectados por dependiente de la carga movimiento trapecio.
Introducción
Los vectores de fuerza producidos en el pulgar punta por los músculos del pulgar individuales no han sido previamente cuantificados, a pesar de que estos datos sean decisivas para describir

cómo las fuerzas musculares se manifiestan como vectores de fuerza del pulgar punta en los sanos, paralizado, y post- pulgar operativo. Las descripciones de la función biomecánica de los músculos del pulgar y sus tendones incluyen medidas cuantitativas de parámetros musculares, incluyendo los brazos de momento (es decir, la distancia perpendicular entre la línea de fuerza de la acción y el centro de la articulación) y la arquitectura muscular (por ejemplo, longitud de la fibra, cruzada fisiológica área de la sección (PCSA)) [3,5,14]. Por desgracia, los parámetros musculares no se traducen directamente o de forma inequívoca en las descripciones del vector de fuerza 3D cada músculo produce en el pulgar punta - donde se producen fuerzas de arrastre y donde los vectores de fuerza necesitan ser restaurados después bajo la parálisis del nervio mediano, por ejemplo. Del mismo modo, la descripción gráfica de las líneas de acción del intacta y tendones transferidos en cada junta ha sido de uso limitado para representar la función biomecánica de los músculos en el pulgar punta, para predecir el déficit después de la parálisis, y comparar alternativas transferencias tendinosas. Estas parcelas cartesianas del momento de generación de la capacidad de un músculo sobre cada articulación se cruza [3,14] se crean mediante la combinación de las líneas de acción de los tendones con respecto a las estructuras anatómicas (por ejemplo, ejes de articulación, otros tendones, etc.) con PCSA y brazo de momento de datos. Estas parcelas destilan las complejas líneas anatómicas de acciones músculos en diagramas manejables que describen el par de un músculo o tendón transferencias podrían producir alrededor de ejes conjuntas específicas. Sin embargo, estas parcelas no pueden ser inequívocamente extrapolarse a encontrar el vector de fuerza de una transferencia de tendón produce en el pulgar punta.
Es importante destacar que las descripciones anteriores de la función biomecánica de los músculos del pulgar se basan en estimaciones precisas y realistas de momento brazos [2] -, pero la validez de las medidas del brazo de momento depende de la habilidad y realistas supuestos técnicos sobre el número, la ubicación y la orientación de la articulación ejes del pulgar, que sigue siendo discutible (cf. [9] frente a [5]). Además, puede haber interindividual variabilidad y depende de la carga de deformación de caminos tendón o el movimiento de los huesos del carpo, especialmente del trapecio [3], que no se contabilizan en cualquier modelo cinemático del pulgar o mediciones de brazos de momento. Tenga en cuenta que brazos de momento se han medido mediante la aplicación de tensión del tendón de a lo sumo 10% de la fuerza de los músculos del pulgar (es decir, 2 N [14]), aunque algunos músculos del pulgar pueden producir fuerzas de hasta 100 N [5]. También es importante señalar que la transformación de las fuerzas musculares a vectores de fuerza del pulgar punta se supone que es lineal en modelos biomecánicos [1,8,16], a pesar de los ligamentos y los tendones de deformación pueden someterse bajo cargas fisiológicas [3, 17] debido a sus propiedades viscoelásticas.
En este estudio, nos expandimos en un enfoque de identificación del sistema descrito anteriormente [15,18] para abordar dos cuestiones: (i) ¿Cuál es la magnitud 3D y la dirección del vector de fuerza cada músculo produce en el pulgar punta (ii) hacer? vectores de fuerza pulgar punta aumentan linealmente con la tensión del tendón de magnitudes de tensión realistas? A diferencia de las descripciones disponibles de la función biomecánica de los músculos del pulgar,

este enfoque no hace ninguna suposición sobre la estructura cinemática del pulgar, ya que mide directamente los vectores de fuerza pulgar de punta que surgen cuando se aplican tensiones conocidas a lo largo de las líneas de acción de la músculos de los pulgares de cadáver. También proporcionamos un ejemplo de una aplicación clínica de este enfoque mediante la medición de los vectores de fuerza del pulgar punta producidos por dos transferencias de tendón.
Métodos
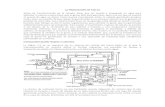
Como en estudios anteriores del dedo índice [15,18] y el pulgar [13], comenzamos por la disección de los músculos intrínsecos y extrínsecos que actúan en el pulgar de 13 muestras frescas congeladas antebrazo (7 hombres, 6 mujeres, edad 76 ± ¼ 9 años). Los especímenes fueron pre-seleccionados para los patógenos transmitidos por la sangre y se mantienen húmedo con una mezcla de suero bovino (10%, producto # C6278, Sigma Chemical Company, St. Louis, MO) y agua durante todo el experimento y la disección. Estamos aislados y alejados de sus orígenes los vientres musculares extrínsecos: (flexor largo del pulgar (FPL), extensor largo del pulgar (EPL), extensor corto del pulgar (EPB), y abductor largo del pulgar (ABPL)). Después de la escisión de los vientres musculares, empatamos y pegados (Vetbond Tejido Adhesivo, 3M Inc., St. Paul, MN) de 1 mm Nylon cuerdas a la cada tendón. A continuación, hemos aislado y retirado de su origen los músculos intrínsecos de la eminencia tenar: abductor corto del pulgar (AbPB), flexor corto del pulgar (FPB), y oponente del pulgar (OPP). Atamos y pegados cuerdas de nylon a la AbPB y FPB en sus inserciones (Fig. 1 h y j, respectivamente). El vientre muscular de la OPP se extirpa por completo, y un eyehook (3- mm ID) se atornilla al ras de la superficie de la primera metacarpiano en la inserción OPP (Fig. 1f). Otros corvados se atornillan a ras en el trapecio y trapezoide en los orígenes de la AbPB y OPP, respectivamente, y se utilizaron para encaminar los cables de nylon (Fig. 1i y g, respectivamente). Un anillo flotante de 3 mm atada alrededor del extremo proximal del tercer metacarpiano se utiliza para representar el origen de la FPB (en la fascia palmar (Fig. 1k). Después de la disección de los músculos de la eminencia tenar, extirpados el vientre del aductor del pulgar (ADD). Estamos jodidos una eyehook en el aspecto proximal-cubital de la falange proximal en el origen ADD (Fig. 1a). Debido a la forma de abanico de la ADD, representamos el músculo con dos cuerdas de nylon. La oblicua ADD (Addo) espinal se enruta a través de un eyehook colocado en el hueso grande (Fig 1c.), y el transversal ADD (addt) se enruta a través de un eyehook colocado en el extremo distal de la cara palmar del tercer metacarpiano (Fig 1b.); estos corvados fueron colocados en los extremos proximal extrema y localizaciones distales del origen ADD para representar a todas las acciones posibles (por suma de vectores) de la ADD en forma de abanico. El primer interóseo dorsal (DIO) se aisló y se escindieron y corvados fueron colocados en el aspecto cubital del primer metacarpiano (a mitad de eje) y en el aspecto radial de la cabeza del segundo metacarpiano en el origen y la inserción de la DIO, respectivamente (Fig. 1d y e). También nos derrotamos dos transferencias tendinosas de uso común para la baja parálisis del nervio mediano [7]:

Fig. 1. Diagrama esquemático disección Representante muestra la ubicación aproximada eyehook y líneas de acción de las cuerdas musculares y transferencia de tendones intrínsecos.
transferir A (Tra), atribuido a Burkhalter et al., se lleva a cabo mediante la transferencia del extensor indicis muscular proprius a la inserción de la AbPB fallado a través del hueso pisiforme, y la transferencia B (TRb), atribuido a Riordan, se lleva a cabo mediante la transferencia de la flexor superficial (FDS) del dedo anular de la inserción de la AbPB fallado a través de un resbalón en el flexor cubital del carpo (FCU) (Fig. 1 l y m, respectivamente). En los casos donde se utilizó corvados para representar el origen de los músculos (ADD, OPP y DIO) atamos el cordón de nylon a la base de la eyehook (más que el ojo en sí) para asegurarse de que el cable estaba en contacto con el hueso , imitando el origen tendinoso que sale del hueso. Caminos de tendones quedaron cubiertas por la piel para evitar la desecación de las vainas de los tendones. Después

de la disección, se utilizó un dispositivo de fijación externa (AgeeWristJack, Mano Biomecánica Lab, Inc., Sacramento, CA) para fijar el segundo y tercer metacarpianos a la radio y el cúbito en punto muerto flexión de la muñeca / extensión radial y / desviación cubital [15, 18]. Entonces hemos configurado el pulgar en dos posturas funcionales utilizando un goniómetro manual de: pizca clave (10 interfalángica (IP) de flexión, 45 metacarpofalángica (MP) flexión y 0 carpometacarpiana (CMC) abducción y flexión) y una pizca de oposición (45 flexión IP, 10 flexión MP, 45 CMC secuestro y 0 CMC flexión). Formamos moldes termoplásticos (Omega Max, North Coast Medical Inc., Morgan Hill, CA) para cada una de estas posturas para mantener el pulgar en posición mientras se monta en una mesa-top marco de carga personalizado. El bastidor de carga de aluminio aloja diez actuadores lineales, cada uno compuesto de un motor paso a paso (modelo 801B-AM, American Scientific Instrument Corp., Palos Hills, IL) montado en línea con una célula de carga uniaxial (serie SML ± 107,5 N o ± 215 N, dependiendo de la fuerza del músculo simulado, InterfaceForce, Scottsdale, AZ) y un resorte de extensión (para aumentar la resolución de control de la fuerza). Montamos la muestra en el marco de carga mediante la configuración en clave estandarizada o postura pizca oposición. Al igual que en nuestros estudios in vivo [10,16,19], el pulgar en interfaz con un sensor celebrada rígidamente 6 grados de libertad de fuerza / par (F / T nano17, ATI / Industrial Automation, Garner, NC) a través de un dedal termoplástico formado alrededor de la falange distal. El dedal se rígidamente conectado al sensor y se pega a la pulpa del pulgar para mantener el pulgar de punta en el cartucho (Fig. 2, recuadro). Las condiciones de contorno mixtas de la interfaz de dedal pulgar (interfaz de tejidos blandos para palmar, radial, cubital, y la producción de fuerza distal, y una interfaz rígida de la miniatura y dedal durante la producción de fuerza dorsal) son nuestro método bien establecido de forma no invasiva de medición 3D la producción de fuerza dígitos-tip in vivo [10,16,19] que permiten la cumplimiento natural de los tejidos blandos.
Una computadora personal (Celeron, Dell Computer Corporation, Round Rock, Texas) con una tarjeta de adquisición de datos (DAQ PCI 6021E, National Instruments Corporation, Austin, TX) ejecutar programas personalizados en LabVIEW (National Instruments Corporation, Austin, TX) controla el lineal actuadores unidos al cable de nylon de cada tendón. Después de montar la muestra, que mide el vector de fuerza de salida en el pulgar de punta cuando la tensión se aplicó a cada tendón. Nos manda cada actuador lineal a la rampa gradualmente la tensión a partir de cero a un valor deseado y volver a bajar a cero a partir de ese valor en diez rampa y retención pasos en cada dirección bajo control de la fuerza (precisión: ± 0,05 N). Grabamos pulgar punta fuerza de salida del vector durante los períodos de retención para excluir vibraciones actuador. No hemos analizar el vector par producido en el pulgar de punta, ya que está más allá del alcance de este trabajo. La fuerza máxima para cada músculo se basa en la fracción de masa reportado en la literatura [3] y se redujo de manera que cada músculo alcanzó aproximadamente un tercio de su fuerza máxima predijo basa en PCSA (Tabla 1, columna FMAX, tenga en cuenta, era FMAX se supone que es idéntico para ambas posturas). El trabajo previo mostró que las tensiones de los tendones mayor que 40 N correrían el riesgo de ruptura de la unión del tendón al cable de Nylon [15,18]. Se calcularon dos medidas de reproducibilidad intra-muestra calculando la diferencia porcentual magnitud y ángulo incluido entre los vectores de

fuerza de salida pulgar de punta para cada músculo a través de dos pruebas test / re-test. Para la primera medida de la reproducibilidad, repetimos ramp-up y down ensayos para todos los músculos después de desacoplar el pulgar punta en el dinamómetro, moviendo el pulgar al azar a través de su rango de movimiento y volver a acoplar el pulgar punta sin mover el dinamómetro. Esta cuantifica la sensibilidad de los vectores de fuerza del pulgar punta a cualquier variación de asientos conjuntos que pueden ocurrir después de la articulación del pulgar y de volver a colocar el cartucho en la posición idéntica y orientación que el primer juicio. Para la segunda medida de la reproducibilidad, repetimos ensayos después de volver a hacer todo el procedimiento de montaje: colocamos el molde postura en el pulgar (manteniéndolo en la llave o pellizco oposición postura deseado aproximado), desacoplado el dinamómetro, y trasladamos el banco a una ubicación y la espalda al azar, con la intención de volver a conectar el dedal para el dinamómetro en la misma postura pulgar y el dedal posición y orientación que el primer juicio. Esta cuantifica la sensibilidad de los vectores de fuerza del pulgar punta para el procedimiento de montaje, sin incluir la creación de los moldes postura termoplásticos, pero incluyendo las variaciones de asientos conjuntos que pueden haber ocurrido debido a cambios en las relaciones espaciales entre los huesos después de volver a conectar el pulgar a la punta dinamómetro reorientar su
Se utilizaron tres medidas para cuantificar la relación entre las tensiones de los tendones de entrada y salida de los vectores de fuerza del pulgar punta. (I) Nos pareció que la acción fundamental de cada músculo en el pulgar de punta mediante el cálculo de un vector de fuerza media 3D pulgar punta tanto en magnitud y dirección a través de los niveles de tensión para cada tendón para cada espécimen y promediado en especímenes. (Ii) Nos caracteriza el grado de asociación entre la tensión del tendón de entrada y la magnitud euclidiana de la salida del pulgar punta vector de fuerza mediante el cálculo del cuadrado de su coeficiente de correlación producto-momento de Pearson (r2). Y (iii) se probó la linealidad de la transformación de la tensión del tendón a thumbtip magnitud de la fuerza mediante la regresión de las tensiones de los tendones (X) contra cada uno de los tres componentes de la fuerza (en el marco de referencia palmar-cubital proximal; Fig. 2, recuadro) del vector de salida pulgar punta (Y) utilizando un modelo cuadrático (Y ¼ a0 a1 þ þ X a2 X2). Un F-test (a ¼ 0:05) determina si el término cuadrático (a2) fue significativamente diferente de cero. Sólo si la hipótesis nula (H0: a2 ¼ 0) no podía ser rechazada en las tres direcciones de la fuerza podríamos concluir que la fuerza de salida del vector pulgar punta escalar linealmente con la tensión del tendón. De lo contrario, llegamos a la conclusión de que la respuesta fue significativamente diferente de lineal.


En todas las muestras, la tensión en cada tendón fue elevada paulatinamente hasta de cero a su nivel FMAX (N) en diez etapas iguales, y luego en rampa a cero en diez pasos. El FMAX aplica a cada tendón se basa en los valores publicados PCSA [3,4] y el estrés muscular máxima de 35,4 N / cm2 [4,6,12,20]. % NL es el porcentaje de casos de regresión de las tensiones del tendón contra cada uno de los tres componentes de la fuerza del pulgar punta que eran no lineal . Estos componentes vigor pulgar punta vector (promediado en los niveles de tensión y muestras, y escalar a kF k) en el palmar (PAM), cubital (LSN) y proximal (PRX) direcciones ortogonales (N) se presentan como si todas las manos mano derecha. kF k es la magnitud (N) (media (SD)) de los vectores de fuerza en sus valores de fuerza máxima (fmax). PRJ columnas indican la variabilidad orientación (SD en grados) de la dirección media de los vectores de fuerza pulgar de punta en el dorsal (DSL) y radial (RAD) Vistas (ver recuadro).
Resultados
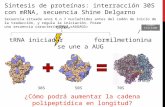
Los vectores de fuerza media 3D pulgar de punta producidos por todos los músculos del pulgar se muestran en la Fig. 3 y en la Tabla 1. Ver www.mae.cornell.edu/nmbl/thumb/avgvec.html para una exploración tridimensional interactiva de los resultados respecto a la postura de la oposición. El alto grado de asociación entre la tensión del tendón y la magnitud de la fuerza de salida del vector pulgar punta se muestra por los diagramas de caja que muestran todos los valores de r2 través posturas y especímenes a través de los músculos (Fig. 3, parcelas de la caja). La fuerza del pulgar punta vector de salida fue no linealmente relacionada con la tensión del tendón de entrada en la mayoría de los casos (Tabla 1, columna% NL), lo que sugiere que un segundo grado o higherorder es necesaria relación de describir cómo escalar los vectores de fuerza pulgar de punta con la tensión del tendón. En cuanto a la reproducibilidad del experimento cuando articulados, el pulgar (sin mover el dinamómetro), la fuerza de salida del pulgar punta cambió en magnitud por 4 ± 18% y dirección de 9 ± 10 en comparación con la prueba inicial. Esto sugiere el experimento fue sensible a los asientos de las articulaciones. Al volver a montar el pulgar y el cambio de posición del dinamómetro, el pulgar de punta magnitud de la fuerza de salida cambia una media de 35% con respecto a la primera prueba (desviación estándar (SD) ¼ 77%), y la dirección del vector cambiado por un promedio de 34 (SD ¼ 34). Esto sugiere que el experimento fue muy sensible a los efectos combinados de la junta de asiento y el procedimiento de montaje.
Discusión
En los sistemas musculoesqueléticos múltiples conjuntos como el pulgar, un músculo genera un par en cada unión cruza que es proporcional a la fuerza del brazo y el momento del músculo. La fuerza y el par de salida en una yema del dedo en pizca estática depende del par neto en cada articulación producida por la acción combinada de todos los músculos activos, y la geometría y la configuración de la estructura del esqueleto del dedo [16,19]. Debido a la anatomía compleja

del pulgar, es difícil predecir con certeza la salida del pulgar punta cada músculo del pulgar produce [16]. En este estudio, se caracterizaron los vectores de fuerza del pulgar punta producidos por cada músculo del pulgar y dos transferencias de tendón aplicando directamente las tensiones conocidas para el tendones del pulgar de cadáver y la medición de la producción de fuerza resultante en la punta del pulgar. Los vectores 3D promedio de fuerza pulgar punta describen cómo las acciones de las tensiones del tendón abarcan las posibles direcciones de la fuerza productora de 3D en el pulgar de punta sin tener suposiciones hechas sobre el sistema biomecánico subyacente (por ejemplo, estructura cinemática [15,18]); m Fig . 3, Tabla 1, y avgvec.html www.mae.cornell.edu/nmbl/thumb/. Estos gráficos, tablas, y websiten interactivo complementarán las descripciones disponibles de las acciones de los músculos del pulgar [3,11,14] mediante la presentación de la descripción 3D del vector de fuerza producida por los músculos individuales en el pulgar de punta. Además, se informó de la acciones de dos transferencias de tendón común de parálisis mediana baja, lo que permite una fácil comparación de sus vectores de fuerza pulgar punta con respecto a la musculatura disponible y paralizado.
Porque encontramos que los vectores pulgar de punta están linealmente relacionadas con la tensión del tendón, nuestro estudio se limita a que estos vectores de fuerza promedio son válidos hasta la tercera de régimen máxima fuerza muscular y extrapolando a las tensiones de los tendones más altos puede no ser válida. Dado que la manipulación más funcional se produce a niveles de fuerza submáximos, nuestros resultados son, sin embargo, el representante de las necesidades reales de la función del pulgar. Además, el enrutamiento de las cuerdas de nylon, incluyendo la colocación visual de tornillos eyehook, no puede tener reproducido los caminos de algunos músculos precisión. Además, la actividad en un músculo puede afectar a la línea de acción de otro músculo, por ejemplo, cuando la actividad en el OPP puede causar que el AbPB se separe del pulgar CMC articulación (aumentando su brazo de momento [3]). Aplicar tensión a los músculos múltiples simultáneamente puede resultar en el aumento de la no linealidad. Actualmente estamos explorando la no linealidad de vectores de fuerza-pulgar punta cuando varios tendones se cargan simultáneamente. Por último, nuestros dos mediciones de reproducibilidad intra-espécimen sugieren vectores de fuerza de salida del pulgar punta son sensibles tanto a la junta de asiento y el procedimiento de montaje. Los pequeños cambios en los vectores de fuerza (4 ± 18% y 9 ± 10 en magnitud y dirección, respectivamente) cuando el pulgar de punta fue devuelto a la misma posición y orientación después de mover el pulgar (medida primero reproducibilidad) se puede atribuir razonablemente a las diferencias en los asientos de las articulaciones debido a que el pulgar columna esquelético del pulgar puede tener más de 6 grados de libertad debido a la de los tejidos blandos en la plataforma de pulgar, y la complejidad cinemática y la laxitud inherente de las articulaciones del pulgar. Es decir, la fijación de la posición y orientación del dedal y la mano no garantizan que todas las juntas se sentarían en la misma forma antes y después de mover el pulgar. Los cambios mucho mayores en los vectores de fuerza (35 ± 77% y 34 ± 34 en magnitud y dirección, respectivamente) cuando se volverá a colocar el pulgar y el dinamómetro (segunda medida reproducibilidad) muestran que los resultados son muy sensibles a los efectos combinados de las articulaciones de estar y

procedimiento de montaje. En el futuro, vamos a utilizar manipuladores robóticos (como en [15,18]) y análisis de movimiento 3D para mejorar la postura pulgar y exactitud de montaje, pero necesidad de conservar el uso del dedo de guante para permitir la compatibilidad con los estudios in vivo.

Fig. 3. Promedio de vectores de salida del pulgar punta (N) para cada postura funcional en proyecciones anatómicas. Todos los datos fueron rotados a una mano derecha. Para una exploración tridimensional interactiva de los resultados de la postura de la oposición vea ww.mae.cornell.edu/nmbl/thumb/avgvec.html. También ponen de manifiesto los valores de r2 de magnitud euclidiana pulgar punta vector de fuerza vs. tensión del tendón para cada músculo a través de posturas y especímenes.
Nuestros resultados demuestran que las pulgar punta magnitudes vectoriales fuerza están fuertemente asociados con la tensión del tendón (r2> 0: 8), con DIO y addt tener valores más bajos r2, pero> 0.5 (Fig 3, diagramas de caja.). Además, la correlación entre el pulgar-tip fuerza vector de dirección y la tensión del tendón está mejor modelado por una función no lineal (Tabla 1, columna% NL). El comportamiento no lineal del sistema, suponiendo que la deformación insignificante del hueso, es probable debido a los caminos dependientes de la carga del tendón viscoelástico, la junta de asiento y / o el movimiento de los huesos. Tuvimos cuidado de usar rígido 200 cuerda de nylon N prueba y marcos rígidos para eliminar la posibilidad de que nuestro aparato de carga podría introducir artefactos de deflexión no lineales. Las relaciones no lineales que encontramos entre la entrada de tensión del tendón y los vectores de salida de fuerza del pulgar punta desafía la suposición común que se utiliza para los modelos biomecánicos del pulgar que esta relación es lineal [1,8,16]. Actualmente estamos explorando la medida en que estas no linealidades afectan el control motor del pulgar.
Dependiente de la carga de movimiento proximal del trapecio es un contribuyente probable que la no linealidad del pulgar punta producción vector de fuerza. En nuestros experimentos preliminares, donde inmovilizados la falange distal del pulgar al dinamómetro (como en [15,18]), nos dimos cuenta thumbtip vectores de fuerza balanceaban progresivamente proximal y aumentado rápidamente en magnitud que la tensión del tendón aumentó. Un examen cuidadoso mostró que el trapecio emigró proximal cuando se aplicaron las tensiones del tendón, por lo tanto haciendo que el pulgar de punta a '' colgar '' en el dinamómetro. Nosotros, por lo tanto, utilizamos un dedal para permitir el cumplimiento fisiológica en el acoplamiento pulgar de punta dinamómetro, como en nuestros estudios in vivo [10,16,19], para permitir que las juntas para permanecer sentados. Si bien esto puede haber añadido variabilidad, a partir de entonces los vectores de fuerza de salida ya no se balanceaban proximal. Movimiento dependiente de la carga se ha informado en otras partes del trapecio [3] y el carpo en general [17], pero no se han reportado medidas cuantitativas de este movimiento. A pesar de que este estudio no fue diseñado ni equipado para medir de forma fiable el movimiento trapezoidal, que con- confirmado movimiento trapezoidal en dos muestras (con un pulgar de punta acoplado rígidamente) midiendo el desplazamiento de un pasador insertado en el trapecio (usando primers de vídeo digital) como una función de la tensión FPL. Nos pareció que este movimiento sea? 2,0 mm en la dirección proximal en máxima tensión FPL, que probablemente subestima el movimiento trapezoidal en comparación a cuando más músculos están activos. Para excluir la posibilidad de que nuestra disección de la musculatura intrínseca llevó a trapezoidales laxitud, se realizó un experimento adicional donde cargamos FPL antes de la disección de los músculos

intrínsecos, y observamos un movimiento similar de un alfiler se inserta en el trapecio. Por ello, proponemos el pulgar no tiene una base rígida en el trapecio, pero en realidad actúa como un '' dígitos flotante '' afectados por el movimiento de los huesos del carpo cuando se cargan sus tendones. Este desplazamiento dependiente de la carga del trapecio probablemente contribuye a la transmisión no lineal de la tensión del tendón por, como mínimo, afectando de estar y configuración de la junta, que a su vez afecta a la transformación de las tensiones de los tendones individuales en los vectores de fuerza del pulgar punta. Estamos llevando a cabo estudios adicionales in vivo mediante tomografía computarizada durante pizca estática para caracterizar la carga de la dependencia de la cinemática del pulgar, y cuantificar los cambios en la cinemática de las articulaciones, los tendones y los caminos brazos de momento, si las hubiera.
Nuestro trabajo tiene varias implicaciones clínicas. La no linealidad de la producción de fuerza la punta del dedo que encontramos es clínicamente importante porque pone en cuestión el método convencional de la cuantificación de la función mecánica de musculotendons. Para describir las acciones de los músculos, los investigadores informan de tablas de potenciales de momento [3,14], que reflejan la ventaja mecánica de los músculos alrededor de cada articulación se cruzan, y la tensión máxima tendón predicho por PCSA. Las no linealidades en la producción de fuerza del pulgar punta que hemos identificado sugiere que los potenciales momento pueden estar relacionados con forzar nivel en el músculo, y que los potenciales momento reportados en la literatura representan sólo una instancia de una respuesta continua a la fuerza. Los investigadores sólo han registrado la ventaja mecánica de un músculo bajo sólo tensiones tendón nominal (por ejemplo, 2 N en [14]), por lo tanto los datos del brazo momento pueden no ser representativos de fisiológicamente tendones cargados. Además, nuestro trabajo pone de relieve cómo anatómica estándar nomenclatura puede ser de poco valor en la descripción de la producción de fuerza la punta del dedo para la restauración clínica de la función. Nomenclatura anatómica convencional describe acciones musculares dedo desde la perspectiva de los movimientos articulares individuales: secuestradores secuestran una articulación determinada, mientras que los flexores flexionar una articulación determinada. Estos nombres simplemente especifican el movimiento dominante de la cifra con la excursión del tendón, a menudo mientras otras articulaciones se mantienen fijos, y tienen poco valor en la descripción de la producción de fuerza del pulgar punta incluso en el caso isométrica (por ejemplo, una pizca). Nuestros complementos de trabajo nomenclatura anatómica proporcionando descripciones funcionales de vectores de fuerza en 3D en el pulgar punta - donde se producen fuerzas de arrastre y donde los vectores de fuerza tienen que ser restaurado clínicamente. El uso de un marco de referencia fijo en la punta del pulgar (Fig. 2, recuadro) observamos, por ejemplo, que la acción del pulgar punta de Addo y addt es mayor en las direcciones distal y palmares que en el cubital ('' 'aducción') en dirección a, y que OPP actúa casi exclusivamente en la dirección distal (Fig. 3).
Por último, nuestros resultados demuestran como alternativa, pero, transferencias tendinosas presumiblemente equivalentes para restaurar la oposición del pulgar pueden ser comparados y

contrastados mediante el análisis de la fuerza de salida del pulgar punta 3D que producen. Al explorar los datos de forma interactiva (ver www.mae.cornell.edu/ nmbl / pulgar / avgvec.html), y en las Vistas dorsal de la figura. 3, es evidente que la transferencia B (TRB: transferir el dedo anular FDS través de un resbalón en el FCU) mejor reproduce la componente radial de la fuerza perdida después de la parálisis del nervio mediano bajo (es decir, siempre con anterioridad por AbPB). Este es sólo un ejemplo de cómo las transferencias del tendón se puede comparar. En el futuro, otros procedimientos quirúrgicos podrían ser rigurosamente evaluados de esta manera ..