Transformada de Laplacejoseespi/SLD/543214_SLD_Cap_III.pdf · 2017-02-16 · ©UdeC - DIE 5 0 5 0 2...
31
© UdeC - DIE 0 T f c sT , ( ) lim → 1 → f c sT , ( ) 1 e s - T ⋅ - sT ⋅ := f c sT , ( ) 0 ∞ t f c tT , ( )e s - t ⋅ ⋅ ⌠ ⌡ d := Impulso Impulso aproximado f c tT , ( ) 1 T Φ t () Φ t T - ( ) - ( ) ⋅ := Caso 3 f b sa , ( ) 1 s a + := f b sa , ( ) 0 ∞ t f b ta , ( )e s - t ⋅ ⋅ ⌠ ⌡ d := Exponencial decreciente f b ta , ( ) e a - t ⋅ Φ t () ⋅ := Caso 2 f a s () 1 s := f a s () 0 ∞ t f a t ()e s - t ⋅ ⋅ ⌠ ⌡ d := Escalón f a t () Φ t () := Caso 1 ft () 1 2 π ⋅ j ⋅ cj ∞ ⋅ - cj ∞ ⋅ + s fs ()e st ⋅ ⋅ ⌠ ⌡ d ⋅ = la transformada inversa resulta ser, fs () 0 ∞ t ft ()e s - t ⋅ ⋅ ⌠ ⌡ d = Sea la señal f(t), entonces la Transformada de Laplace de f(t), denotada por f(s) es, Transformada de Laplace Definiciones problema solución Dominio original difícil problema solución Dominio de la transformación fácil transformación directa transformación inversa Estudiar la Aplicabilidad de la Transformada de Laplace en Sistemas de Ingeniería. Problema Transformada de Laplace Capítulo III - Transformaciones 1 de 31 Sistemas Lineales Dinámicos - 543 214
Transcript of Transformada de Laplacejoseespi/SLD/543214_SLD_Cap_III.pdf · 2017-02-16 · ©UdeC - DIE 5 0 5 0 2...

© UdeC - DIE
0T
fc s T,( )lim
→1→fc s T,( )
1 es− T⋅
−
s T⋅:=fc s T,( )
0
∞
tfc t T,( ) es− t⋅
⋅⌠⌡
d:=
ImpulsoImpulso aproximadofc t T,( )1
TΦ t( ) Φ t T−( )−( )⋅:=Caso 3
fb s a,( )1
s a+:=fb s a,( )
0
∞
tfb t a,( ) es− t⋅
⋅⌠⌡
d:=
Exponencial decrecientefb t a,( ) ea− t⋅
Φ t( )⋅:=Caso 2
fa s( )1
s:=fa s( )
0
∞
tfa t( ) es− t⋅
⋅⌠⌡
d:=
Escalónfa t( ) Φ t( ):=Caso 1
f t( )1
2 π⋅ j⋅ c j ∞⋅−
c j ∞⋅+
sf s( ) es t⋅
⋅⌠⌡
d⋅=
la transformada inversa resulta ser,
f s( )
0
∞
tf t( ) es− t⋅
⋅⌠⌡
d=
Sea la señal f(t), entonces la Transformada de Laplace de
f(t), denotada por f(s) es,
Transformada de LaplaceDefiniciones
problema
solución
Dominio original
difíc
il
problema
solución
Dominio de la transformación
fácil
transformación
directa
transformación inversa
Estudiar la Aplicabilidad de la Transformada de Laplace en Sistemas de Ingeniería.Problema
Transformada de Laplace
Capítulo III - Transformaciones 1 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
f2 s( )3−
s s 3−( )⋅:=f2 s( )
2−
s2
1−:=
f2 s( )exp s T⋅( ) 2− exp s− T⋅( )+
s2
:=f2 s( )
1
s
1
s 3−−:=f2 s( )
1
s 1+
1
s− 1++:=
f2 s( )
∞−
∞
tf t( ) es− t⋅
⋅⌠⌡
d:=f2 s( )
0
∞
tf t( ) es− t⋅
⋅⌠⌡
d
∞−
0
tf t( ) es− t⋅
⋅⌠⌡
d+:=f2 s( )
0
∞
tf t( ) es− t⋅
⋅⌠⌡
d
∞−
0
tf t( )− es− t⋅
⋅⌠⌡
d+:=
f t( ) t T+( ) Φ t T+( )⋅ 2 t⋅ Φ t( )⋅−t T−( ) Φ t T−( )⋅+
...:=Caso 4f t( ) Φ t( ) e3 t⋅
Φ t−( )⋅+:=Caso 3f t( ) et−
:=Caso 2
MM
Im n, Im f2 rz
mi iz
n⋅+( )( ):=R
m n, Re f2 rzm
i izn
⋅+( )( ):=Mm n, f2 rz
mi iz
n⋅+( ):=
izm
2− π⋅ m4 π⋅
N⋅+:=rz
m1.001− m
2
N⋅+:=n 0 N..:=m 0 N..:=N 45:=
f2 s( )
∞−
∞
tf t( ) es− t⋅
⋅⌠⌡
d 2exp 4 s⋅( ) 1−
s⋅ exp 2− s⋅( )⋅
exp 4 s⋅( )− 1+
sexp 2− s⋅( )⋅+→:=f t( ) Φ t T+( ) Φ t T−( )−:=T 2:=Caso 1
f2 s( )
∞−
∞
tf t( ) es− t⋅
⋅⌠⌡
d=
Sea la señal f(t), entonces la Transformada Bilateral de Laplace de f(t), denotada por f2(s) es,
Transformada Bilateral de Laplace
Capítulo III - Transformaciones 2 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
f s( )
0
t
tf t( )⌠⌡
df s( )
s
Valor Inicial f t( ) f s( )
0t
f t( )lim
→ ∞s
s f s( )⋅lim
→=
Valor Final f t( ) f s( )
∞t
f t( )lim
→ 0s
s f s( )⋅lim
→=
Señales
Periodicasfo t( ) fo s( ) f t( )
0
∞
i
fo t i T⋅−( )∑=
= f s( )1
1 es− T⋅
−fo s( )⋅=
Convolución f t( ) f s( ) g t( ) g s( ) τf t τ−( ) g τ( )⌠⌡
d f s( ) g s( )⋅
Convolución
Complejaf t( ) f s( ) g t( ) g s( ) f t( ) g t( )⋅
1
2 π⋅ j⋅ c j ∞⋅−
c j ∞⋅+
ωf s ω−( ) g ω( )⋅⌠⌡
d⋅
Propiedades
Linealidad fa t( ) fa s( ) fb t( ) fb s( ) αa fa t( )⋅ αb fb t( )⋅+ αa fa s( )⋅ αb fb s( )⋅+
Escalamient-
o en tiempof t( ) f s( ) f a t⋅( )
1
afs
a
⋅
Despl. en
tiempof t( ) f s( ) f t a−( ) e
a− s⋅f s( )⋅
Despl. en
frecuenciaf t( ) f s( ) e
a− t⋅f t( )⋅ f s a+( )
Derivación f t( ) f s( )tf t( )
d
ds f s( )⋅ f t 0=( )−
Integración f t( )
Capítulo III - Transformaciones 3 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIEAplicacio-
nes
Manipulación de Diagrama de Bloques
h s( )1
A
1
s⋅ fe s( ) fs s( )−( )⋅=
1
A
1
s⋅ v s( ) u s( )⋅ fs s( )−( )⋅=
h s( )1
A
1
s⋅ v s( ) kc e s( )⋅
1
Ti
1
s⋅ e s( )⋅+
⋅ fs s( )−
⋅=1
A
1
s⋅ v s( ) kc
1
Ti
1
s⋅+
⋅ e s( )⋅ fs s( )−
⋅=
fs
fe h
Estánque Válvula
u +
-
v(s)
Controlador
e
kc
+
-
+
1 1
iT s
1 1
A s
hd
h s( )1
A
1
s⋅ v s( ) kc
1
Ti
1
s⋅+
⋅ hd s( ) h s( )−( )⋅ fs s( )−
⋅=
h s( )1
A
1
s⋅ v s( )
1
Ti
kc Ti⋅ s⋅ 1+
s⋅
⋅ hd s( ) h s( )−( )⋅ fs s( )−
⋅=
h s( )1
A
1
s⋅ v s( )⋅
1
Ti
kc Ti⋅ s⋅ 1+
s⋅
⋅ h s( )⋅+1
A
1
s⋅ v s( )
1
Ti
kc Ti⋅ s⋅ 1+
s⋅
⋅ hd s( )⋅ fs s( )−
⋅= Diagrama de Bloques Original
h s( )
1
A
1
s⋅ v s( )
1
Ti
kc Ti⋅ s⋅ 1+
s⋅
⋅ hd s( )⋅ fs s( )−
⋅
11
A
1
s⋅ v s( )⋅
1
Ti
kc Ti⋅ s⋅ 1+
s⋅
⋅+
=
1
A
1
s⋅ v s( )⋅
1
Ti
kc Ti⋅ s⋅ 1+
s⋅
⋅ hd s( )⋅
11
A
1
s⋅ v s( )⋅
1
Ti
kc Ti⋅ s⋅ 1+
s⋅
⋅+
1−
A
1
s⋅ fs s( )⋅
11
A
1
s⋅ v s( )⋅
1
Ti
kc Ti⋅ s⋅ 1+
s⋅
⋅+
+=
h s( )
1
A
1
s⋅ v s( )⋅
1
Ti
kc Ti⋅ s⋅ 1+
s⋅
⋅
11
A
1
s⋅ v s( )⋅
1
Ti
kc Ti⋅ s⋅ 1+
s⋅
⋅+
hd s( )⋅
1−
A
1
s⋅
11
A
1
s⋅ v s( )⋅
1
Ti
kc Ti⋅ s⋅ 1+
s⋅
⋅+
fs s( )⋅+=
h2(s)
h1(s) h
+
fs
hd
h s( )g s( ) v s( )⋅ c s( )⋅
1 g s( ) v s( )⋅ c s( )⋅+hd s( )⋅
g s( )−
1 g s( ) v s( )⋅ c s( )⋅+fs s( )⋅+=
Diagrama de Bloques
Resultanteh s( ) h1 s( ) hd s( )⋅ h2 s( ) fs s( )⋅+=
Capítulo III - Transformaciones 4 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
uo do:= po eo:=
Modelo
Lineal.∆i ∆d io⋅ do ∆i⋅+( )− C
t∆vd
d⋅
∆v
R+= ∆e L
t∆id
d⋅ ∆v+ ∆d vo⋅ do ∆v⋅+( )−=
Modelo
Lineal
Normalizado.
∆v
vo
∆vn=∆i
io
∆in=∆d
do
∆dn=∆e
eo
∆en= Definción de Variables Normalizadas
t∆vn
d
d
1−
R C⋅∆vn⋅
1
R C⋅∆in⋅+
do−
R C⋅ 1 do−( )⋅∆dn⋅+= Modelo Normalizado y Ordenado
t∆in
d
d
R−
L1 do−( )2⋅ ∆vn⋅
R
L1 do−( )⋅ do⋅ ∆dn⋅+
R
L1 do−( )2⋅ ∆en⋅+=
An
1−
R C⋅
R−
L1 do−( )2⋅
1
R C⋅
0
:= bn
do−
R C⋅ 1 do−( )⋅
R
L1 do−( )⋅ do⋅
:= en
0
R
L1 do−( )2⋅
:= cn 1 0( ):=
Problema Estudiar el uso de la T.L. en la respuesta a impulso.
Parámetros L 5 103−
⋅:= C 200 106−
⋅:= R 12:= ∆d1 0.2−:= do 0.5:= eo 6:= ∆e 1:= ∆d2 0.2:=
+
-
L
e(t)
i(t) C
+
-
v(t) R
Sw(t)
Modelo
Promedio.i 1 d−( )⋅ C
tv
d
d⋅
v
R+= e L
ti
d
d⋅ v 1 d−( )⋅+=
Punto de
operaciónvo
eo
1 do−:= vo 12= io
vo
R 1 do−( )⋅:= io 2=
Capítulo III - Transformaciones 5 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
+
-
L
e(t)
i(t) C
+
-
v(t) R
Sw(t)
0 0.005 0.01 0.015 0.02 0.025 0.03500
0
500Respuesta (tensión) a impulso aproximado
0
0 0.005 0.01 0.015 0.02 0.025 0.030
1000
2000
Entrada impulso aproximada
0
Zno3 rkfixed CI 0, tf, nf, D3,( ):=D3 t x,( ) An
x0
x1
⋅ bn ∆un t 0.0005,( )⋅+ en ∆pn t( )⋅+:=
Zno2 rkfixed CI 0, tf, nf, D2,( ):=D2 t x,( ) An
x0
x1
⋅ bn ∆un t 0.005,( )⋅+ en ∆pn t( )⋅+:=
Zno1 rkfixed CI 0, tf, nf, D1,( ):=CI0
0
:=D1 t x,( ) An
x0
x1
⋅ bn ∆un t 0.01,( )⋅+ en ∆pn t( )⋅+:=
t 0tf
nf
, tf..:=n 0 nf..:=nf 2000:=
tf 0.03:=∆pn t( ) 0:=∆un t T,( ) delT t T,( ):=delT t T,( )1
TΦ t( ) Φ t T−( )−( )⋅:=
Simulación.Respuesta
Gráfica a
Impulso en
la Entrada
∆∆∆∆un(t) = d(t).
Capítulo III - Transformaciones 6 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
+
-
L
e(t)
i(t) C
+
-
v(t) R
Sw(t)
0 0.005 0.01 0.015 0.02 0.025 0.03500
0
500Respuesta (tensión) a Entrada Impulso
0
∆hn t( ) kp exp ζ− ωn⋅ t⋅( )⋅1 2 ζ
2⋅+( ) ωn⋅ 1 ζ
2−⋅
1 ζ2
−
sin ωn 1 ζ2
−⋅ t⋅
⋅
2− ζ⋅ ωn⋅ 1 ζ2
−( )⋅
1 ζ2
−
cos ωn 1 ζ2
−⋅ t⋅
⋅+
⋅ Φ t( )⋅:=
Tomando
Laplace
Inversa.
∆hn s( ) kp
2− ζ⋅ ωn⋅ s⋅ ωn2
+
s2
2 ζ⋅ ωn⋅ s⋅+ ωn2
+
⋅=
ζ1
2 R⋅ C⋅1
L C⋅1 do−( )⋅
⋅
:=
kp
do
1 do−:=ωn
1
L C⋅1 do−( )⋅:=∆hn s( ) ∆vn s( )=
do−
R C⋅ 1 do−( )⋅s⋅
1
L C⋅1 do−( )⋅ do⋅+
s2 1
R C⋅s⋅+
1
L C⋅1 do−( )2⋅+
=
Definiendo
Con ∆∆∆∆dn = δδδδ(t) y ∆∆∆∆en= 0s2
∆vn⋅1
R C⋅s⋅ ∆vn⋅+
1
L C⋅1 do−( )2⋅ ∆vn⋅+
do−
R C⋅ 1 do−( )⋅s⋅
1
L C⋅1 do−( )⋅ do⋅+=
t t∆vn
d
d
d
d
1−
R C⋅ t∆vn
d
d⋅
1
R C⋅
R−
L1 do−( )2⋅ ∆vn⋅
R
L1 do−( )⋅ do⋅ ∆dn⋅+
R
L1 do−( )2⋅ ∆en⋅+
⋅+do−
R C⋅ 1 do−( )⋅ t∆dn
d
d⋅+=
Reemplaza-
ndo la 2da
ec. en la
anterior:
t t∆vn
d
d
d
d
1−
R C⋅ t∆vn
d
d⋅
1
R C⋅ t∆in
d
d⋅+
do−
R C⋅ 1 do−( )⋅ t∆dn
d
d⋅+=
Derivando
la 1ra ec.:
2da
t∆in
d
d
R−
L1 do−( )2⋅ ∆vn⋅
R
L1 do−( )⋅ do⋅ ∆dn⋅+
R
L1 do−( )2⋅ ∆en⋅+=
Modelo
Normalizado
y Ordenado
1ra
t∆vn
d
d
1−
R C⋅∆vn⋅
1
R C⋅∆in⋅+
do−
R C⋅ 1 do−( )⋅∆dn⋅+=
Respuesta Matemática a Impulso en la Entrada ∆∆∆∆un(t) = d(t).
Capítulo III - Transformaciones 7 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
5 0 50
2
4
6Señal en Frecuencia
0
5 0 50
0.5
1
1.5Señal en el Tiempo
0
ω ωi ωiωf ωi−
nω+, ωf..:=t ti ti
tf ti−
nt
+, tf..:=
nω 300:=ωf 2 π⋅:=ωi 2− π⋅:=nt 300:=tf 6:=ti 6−:=
Señal a graficarftω ω( ) 2 sin ω T⋅( )⋅
ω:=ftω ω( )
∞−
∞
tft t( ) ej− ω⋅ t⋅
⋅⌠⌡
d=ej ω⋅ T⋅
ej− ω⋅ T⋅
−
j ω⋅=
cos ω T⋅( ) j sin ω T⋅( )⋅+cos ω T⋅( ) j sin ω T⋅( )⋅−( )−+
...
j ω⋅=
2 j⋅ sin ω T⋅( )⋅
j ω⋅=
ft2 s( )
∞−
∞
tft t( ) es− t⋅
⋅⌠⌡
d=es T⋅
es− T⋅
−
s=
Transformada Bilateral de Laplace, por lo tanto la
Transformada de Fourier es:
ft t( ) Φ t T+( ) Φ t T−( )−:=T 2:=Caso 1
f ω( )∞−
∞
tf t( ) ej− ω⋅ t⋅
⋅⌠⌡
d=Nótese que corresponde a la Transformada Bilateral de Laplace,
reemplaznado s por jω.
Sea la señal f(t), entonces la Transformada de Fourier de f(t), denotada por f(ω) es,
Transformada de FourierDefiniciones
Estudiar señales en el campo de la frecuencia.Problema
Transformada de Fourier (Señales No-Periodicas)
Capítulo III - Transformaciones 8 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
5 0 50
2
4
6
8Señal en Frecuencia
2 π⋅0
4 2 0 2 40
1
2
3Señal en el Tiempo
20
ω ωi ωiωf ωi−
nω+, ωf..:=nω 300:=ωf 6:=ωi 6−:=t ti ti
tf ti−
nt
+, tf..:=nt 300:=tf 1.5 π⋅:=ti 1.5− π⋅:=
Señal a graficarftω ω( )100−
100
tft t( ) ej− ω⋅ t⋅
⋅⌠⌡
d:=ftω ω( )∞−
∞
tft t( ) ej− ω⋅ t⋅
⋅⌠⌡
d=ft t( )2
1 t2
+:=Caso 3
4 2 0 2 40
1
2
3Señal en Frecuencia
20
5 0 50
0.5
1
1.5Señal en el Tiempo
10
ω ωi ωiωf ωi−
nω+, ωf..:=nω 300:=ωf 1.5 π⋅:=ωi 1.5− π⋅:=t ti ti
tf ti−
nt
+, tf..:=nt 300:=tf 6:=ti 6−:=
Señal a graficarftω ω( ) 2
1 ω2
+
:=ft2 s( )2
1 s2
−=
Transformada Bilateral de Laplace, por lo tanto la
Transformada de Fourier es:
Señal a graficarft t( ) et−
:=Caso 2
Capítulo III - Transformaciones 9 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIETransformada de Fourier (Señales No-Periodicas)
Problema Revisar su inversa, ejemplos y propiedades.
Determine la función f(t) si su T.F. es f(ω) = δ(ω - ωo). R.: f(t) = 1
( )2
j tf e d∞ ω
−∞ω ω
π ∫ = 1
( )2
j t
oe d
∞ ω
−∞δ ω−ω ω
π ∫ =
1(0)
2oj t
e d∞ ω
−∞δ ω
π ∫ = (0)2
oj te
dω
∞
−∞δ ω
π ∫ = 2
oj te
ω
π. Nótese que si ωo = 0; entonces la T.F. de f(t) =
1
2π es δ(ω). ♣
Determine la T.F. de f(t) = cos(ωot). R.: Como f(t) = cos(ωot) = (ejωot + e
-jωot)/2, y utilizando el resultado anterior se tiene que
f(ω) = πδ(ω - ωo) + πδ(ω + ωo). ♣
Determine la T.F. de f(t) = 0
( )l
t lT∞
=−∞
δ −∑ . R.: Como la señal es periódica, se puede escribir como f(t) = 0jn t
n
n
c e∞
ω
=−∞∑ , donde ω0 =
2π/T0 y cn = 0
0
00
1( )
Tjn t
t e dtT
− ωδ∫ = 1/T0; por lo tanto, f(t) = 0
0
1 jn t
n
eT
∞ω
=−∞∑ y f(ω) = 0
0
1 jn t
n
eT
∞ω
=−∞
∑F = 0
0
1 jn t
n
eT
∞ω
=−∞∑F =
0
0
12 ( )
n
nT
∞
=−∞
πδ ω− ω∑ = 0 0
( )n
n∞
=−∞
ω δ ω− ω∑ . ♣
Simetría de la T.F.. Sea f(t) con T.F. f(ω), si g(t) = f(ω)|ω = t, entonces, g(ω) = 2πf(t)|t = -ω. Dem.:
( )
1( ) ( ) ( ) | 2 ( )
2
12 ( ) 2 ( )
2
j t j t j t
t
j
t
g g t e dt f e dt f t e dt
f e d f t
∞ ∞ ∞− ω − ω − ωω=−∞ −∞ −∞
∞ −ω Ω=−ω−∞
ω = = ω = ππ
= π Ω Ω = ππ
∫ ∫ ∫
∫.
Convolución. Sea f(t) con T.F. f(ω) y g(t) con T.F. g(ω), entonces, f(t)*g(t) = f(ω)g(ω). Dem.:
-1
( )
1 1 ( ) ( ) ( ) ( ) ( ) ( )
2 2
1( ) ( ) ( ) ( ) ( )* ( )
2
j t j j t
j t
f g f g e d f e d g e d
g e d f d g t f d g t f t
∞ ∞ ∞ω − ωτ ω
−∞ −∞ −∞
∞ ∞ ∞ω −τ
−∞ −∞ −∞
ω ω = ω ω ω = τ τ ω ωπ π
= ω ω τ τ = − τ τ τ =π
∫ ∫ ∫
∫ ∫ ∫
F.
Capítulo III - Transformaciones 10 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIEProducto. Sea f(t) con T.F. f(ω) y g(t) con T.F. g(ω), entonces, f(t)g(t) = f(ω)*g(ω)/(2π). Dem.:
( )
1( ) ( ) ( ) ( ) ( ) ( )
2
1 1 1( ) ( ) ( ) ( ) ( )* ( )
2 2 2
j t j t j t
j t
f t g t f t g t e dt f t g e d e dt
f t e dtg d f g d f g
∞ ∞ ∞− ω ψ − ω
−∞ −∞ −∞
∞ ∞ ∞− ω−ψ
−∞ −∞ −∞
= = ψ ψπ
= ψ ψ = ω−ψ ψ ψ = ω ωπ π π
∫ ∫ ∫
∫ ∫ ∫
F.
Modulación AM (caso especial del producto). Sea f(t) con T.F. f(ω), entonces, la T.F. de f(t)cos(ωot) es, 1/2f(ω - ωo) + 1/2f(ω + ωo). Dem.:
1 1( )cos( ) ( ) * cos( ) ( )* ( ) ( )
2 2
1( ) ( )
2
o o o o
o o
f t t f t t f
f f
ω = ω = ω πδ ω−ω + πδ ω+ωπ π
= ω−ω + ω+ω
F F F.
Muestreo con Impulsos (caso especial del producto). Sea f(t) con T.F. f(ω), entonces, la T.F. de
0( ) ( )l
f t t lT∞
=−∞
δ −∑ es 0
0
1( )
n
f nT
∞
=−∞
ω− ω∑ . Dem.:
0 0
0 0 0
0
1( ) ( ) ( )* ( )
2
1 1( )* ( ) ( )
2
k l
n n
f t t kT f t lT
f n f nT
∞ ∞
=−∞ =−∞
∞ ∞
=−∞ =−∞
δ − = ω δ −
π
= ω ω δ ω− ω = ω− ωπ
∑ ∑
∑ ∑
F F
.
Teorema de la Potencia. Sea f(t) con T.F. f(ω) y g(t) con T.F. g(ω), entonces *( ) ( )f t g t dt
∞
−∞∫ =
*1( ) ( )
2f g d
∞
−∞ω ω ω
π ∫ . Dem.:
*
* *
* *
1 1( ) ( ) ( ) ( ) ( ) ( )
2 2
1 1( ) ( ) ( ) ( )
2 2
j t j tf t g t dt f t g e d dt f t g e d dt
g f d f g d
∞ ∞ ∞ ∞ ∞ω − ω
−∞ −∞ −∞ −∞ −∞
∞ ∞
−∞ −∞
= ω ω = ω ω π π
= ω ω ω= ω ω ωπ π
∫ ∫ ∫ ∫ ∫
∫ ∫.
Capítulo III - Transformaciones 11 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIETeorema de la Energía (Teorema de Rayleigh y caso especial del Teorema de Potencia). Sea f(t) con T.F.
f(ω), entonces 2| ( ) |f t dt∞
−∞∫ = 21| ( ) |
2f d
∞
−∞ω ω
π ∫ . Dem.:
Dado que 2| ( ) |f x = *( ) ( )f x f x se demuestra con el teorema anterior.
5 0 5 0
0.5
1
1.5
f(t) = e-|t|
π
0 π 0
1
2
3
f(ω) = 2/(1+ω2)a)
0 0
0.5
1
1.5
0( )l
t lT∞
=−∞
δ −∑
π
0 π 0
2π 0 0( )n
n∞
=−∞
ω δ ω− ω∑
b)
5 5 T0 2π
5 0 5 0
0.5
1
1.5
e-|t|
0( )l
t lT∞
=−∞
δ −∑
0
2 0( )
n
f n∞
=−∞
ω− ω∑ /T0
c)
π
0 π ω0 = 2π/T0
Capítulo III - Transformaciones 12 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
Transformada de Fourier
Discreta de ftp(t).
fto2 s( )es T⋅
es− T⋅
−
s:= ftoω ω( ) 2 sin ω T⋅( )⋅
ω:= ftpω n( )
1
To
2 sin 2 π⋅ n⋅ Fo⋅ T⋅( )⋅
2 π⋅ n⋅ Fo⋅⋅:=
ti 10−:= tf 10:= nt 300:= ωi 2.0001− π⋅:= ωf 2 π⋅:= nω 200:= ni 6.0001−:= nf 6:=
t ti ti
tf ti−
nt
+, tf..:= ω ωi ωiωf ωi−
nω+, ωf..:= n ni ni
nf ni−
nf ni−+, nf..:=
10 5 0 5 100
0.5
1
1.5Señal en el Tiempo
To0
5 0 50
2
4
6Fourier Continua y Discreta (por To)
2 π⋅
To
0
Transformada de Fourier (Señales Periodicas)
Problema Estudiar señales periodicas en el campo de la frecuencia.
Definiciones Transformada de Fourier para Señales Periodicas
Sea la señal f(t) de periodo ωo, entonces la Transformada de Fourier de f(t), denotada por f(mωo) es,
Nótese que corresponde a la Transformada de Fourier para un
periodo de la señal evaluada en frecuencias múltiples de ωο.f n( )
ωo
2 π⋅ 0
2 π⋅
ωo
tf t( ) ej− n⋅ ωo⋅ t⋅
⋅
⌠⌡
d⋅=
Definición para valores múltiples de la frecuencia Fο = 1/To.f n( )
1
To 0
To
tf t( ) ej− n⋅ 2⋅ π⋅ Fo⋅ t⋅
⋅⌠⌡
d⋅=
Caso 1 T 2:= To 6:= Fo1
To
:= fto t( ) Φ t T+( ) Φ t T−( )−:= ftp t( )
3−
3
l
fto t l To⋅−( )∑=
:=
Transformada Bilateral de
Laplace de fto(t).
Transformada de Fourier
de fto(t).
Capítulo III - Transformaciones 13 de 31 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
nf 6:=
t ti ti
tf ti−
nt
+, tf..:= ω ωi ωiωf ωi−
nω+, ωf..:= n ni ni
nf ni−
nf ni−+, nf..:=
10 5 0 5 100
1
2
3Señal en el Tiempo
To0
5 0 50
2
4
6Fourier Continua y Discreta (por To)
2 π⋅
To
0
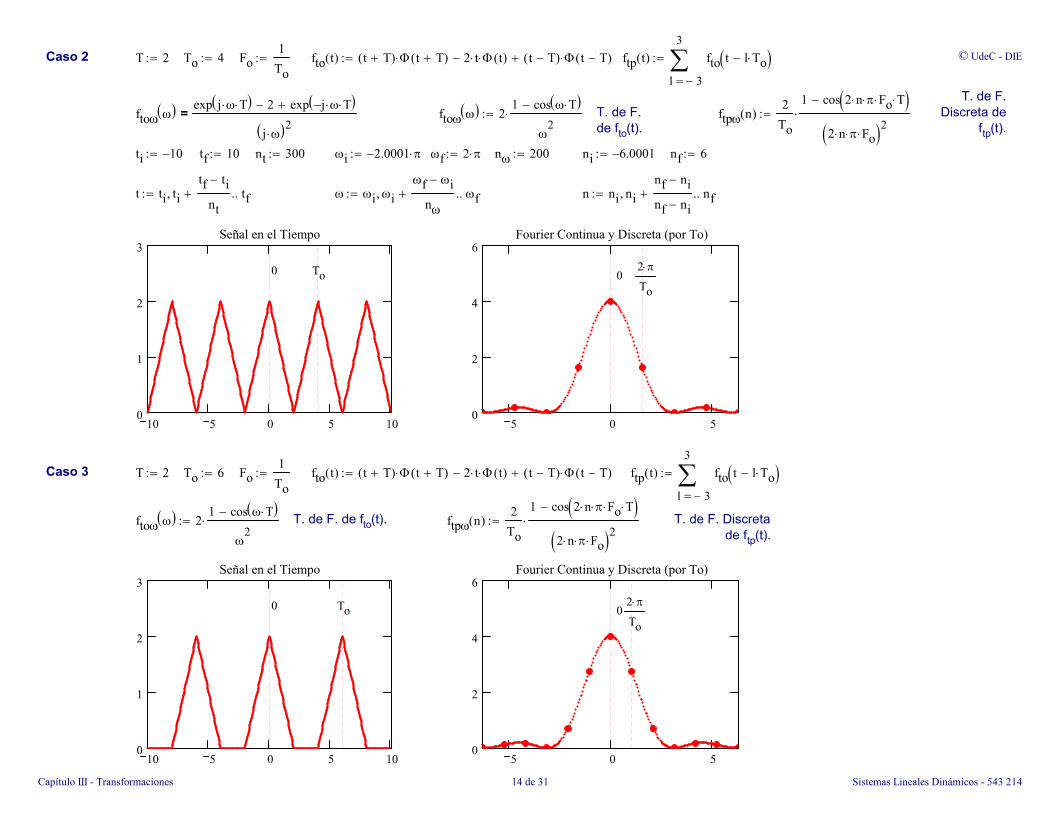
Caso 3 T 2:= To 6:= Fo1
To
:= fto t( ) t T+( ) Φ t T+( )⋅ 2 t⋅ Φ t( )⋅− t T−( ) Φ t T−( )⋅+:= ftp t( )
3−
3
l
fto t l To⋅−( )∑=
:=
ftoω ω( ) 21 cos ω T⋅( )−
ω2
⋅:= T. de F. de fto(t). ftpω n( )2
To
1 cos 2 n⋅ π⋅ Fo⋅ T⋅( )−
2 n⋅ π⋅ Fo⋅( )2⋅:= T. de F. Discreta
de ftp(t).
10 5 0 5 100
1
2
3Señal en el Tiempo
To0
5 0 50
2
4
6Fourier Continua y Discreta (por To)
2 π⋅
To
0
Caso 2 T 2:= To 4:= Fo1
To
:= fto t( ) t T+( ) Φ t T+( )⋅ 2 t⋅ Φ t( )⋅− t T−( ) Φ t T−( )⋅+:= ftp t( )
3−
3
l
fto t l To⋅−( )∑=
:=
T. de F.
Discreta de
ftp(t).ftoω ω( ) exp j ω⋅ T⋅( ) 2− exp j− ω⋅ T⋅( )+
j ω⋅( )2= ftoω ω( ) 2
1 cos ω T⋅( )−
ω2
⋅:= T. de F.
de fto(t).ftpω n( )
2
To
1 cos 2 n⋅ π⋅ Fo⋅ T⋅( )−
2 n⋅ π⋅ Fo⋅( )2⋅:=
ti 10−:= tf 10:= nt 300:= ωi 2.0001− π⋅:= ωf 2 π⋅:= nω 200:= ni 6.0001−:=
Capítulo III - Transformaciones 14 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
0 2 4 6 8 10 12 14 160
2
4
Fourier Discreta (por 2)
34
π⋅ cos
T
To
2⋅ π⋅
⋅
0 2 4 65
0
5Señal en el Tiempo
0
T
n ni ni
nf ni−
nf ni−+, nf..:=nf 16:=ni 0:=t ti ti
tf ti−
nt
+, tf..:=nt 300:=tf 6:=ti 0:=
T. de F. Discreta de ftp(t).
ftpω n( )1
To 0
To
tfto t( ) ej− n⋅ 2⋅ π⋅ Fo⋅ t⋅
⋅⌠⌡
d⋅:=ftp t( )
3−
3
l
fto t l To⋅−( )∑=
:=fto t( ) 3 Φ t T−( ) Φ tTo
2T−
−
−
Φ tTo
2T+
−
− Φ t To T−( )− ++
...
⋅:=Fo1
To
:=To 6:=T 0.5:=
Caso 4 To 6:= Fo1
To
:= fto t( ) 3.0000 sin 1 2⋅ π⋅ To1−
⋅ t⋅
⋅ Φ t( ) Φ t To−( )−( )⋅
0.5− sin 3 2⋅ π⋅ To1−
⋅ t⋅
⋅ Φ t( ) Φ t To−( )−( )⋅+
...
1.0− sin 5 2⋅ π⋅ To1−
⋅ t⋅
⋅ Φ t( ) Φ t To−( )−( )⋅+
...
:=ftp t( )
3−
3
l
fto t l To⋅−( )∑=
:=ftpω n( )
1
To 0
To
tftp t( ) ej− n⋅ 2⋅ π⋅ Fo⋅ t⋅
⋅⌠⌡
d⋅:=
T. de F. Discreta de ftp(t).
ti 6−:= tf 6:= nt 300:= t ti ti
tf ti−
nt
+, tf..:= ni 8−:= nf 8:= n ni ni
nf ni−
nf ni−+, nf..:=
5 0 55
0
5Señal en el Tiempo
0
To0
8 6 4 2 0 2 4 6 80
1
2Fourier Discreta
0
Caso 5
Capítulo III - Transformaciones 15 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
1000 500 0 500 1000200
0
200Fase de la T. de F. de la Sal. Per.
2 π⋅
To
0
1000 500 0 500 10000
0.01
0.02
0.03Mod. (x To) T. de F. de la Sal. Per.
2 π⋅
To
0
ω ωi ωiωf ωi−
nω+, ωf..:=nω 300:=ωf 400 π⋅:=ωi 400− π⋅:=n ni ni
nf ni−
nf ni−+, nf..:=nf 9:=ni 9−:=
∆ynpn n( )1
To
kp
2− ζ⋅ ωn⋅ j 2 n⋅ π⋅ Fo⋅( )⋅ ⋅ ωn2
+
j 2 n⋅ π⋅ Fo⋅( )⋅ 2
2 ζ⋅ ωn⋅ j 2 n⋅ π⋅ Fo⋅( )⋅ ⋅+ ωn2
+
⋅1 2 exp 0.015− j 2 n⋅ π⋅ Fo⋅( )⋅ ⋅ ⋅− exp 0.030− j 2 n⋅ π⋅ Fo⋅( )⋅ ⋅ +
j 2 n⋅ π⋅ Fo⋅( )⋅⋅
⋅ 109−
+:=
T. de F. de la salida periodica ∆∆∆∆ynp(t) que se denotará por ∆ynpn(n) es,
∆ynω ω( ) kp
2− ζ⋅ ωn⋅ j⋅ ω⋅ ωn2
+
j ω⋅( )2 2 ζ⋅ ωn⋅ j ω⋅( )⋅+ ωn2
+
⋅1 2 exp 0.015− j⋅ ω⋅( )⋅− exp 0.030− j⋅ ω⋅( )+
j ω⋅⋅:=∆yns s( ) kp
2− ζ⋅ ωn⋅ s⋅ ωn2
+
s2
2 ζ⋅ ωn⋅ s⋅+ ωn2
+
⋅1 2 exp 0.015− s⋅( )⋅− exp 0.030− s⋅( )+
s⋅:=
T. de F. de ∆∆∆∆yn(t) que se denotará por ∆ynω(ω) es,Laplace de la salida ∆yn(t) que se denotará por ∆yns(s) es,
∆hns s( ) kp
2− ζ⋅ ωn⋅ s⋅ ωn2
+
s2
2 ζ⋅ ωn⋅ s⋅+ ωn2
+
⋅:=∆uns s( )1 2 exp 0.015− s⋅( )⋅− exp 0.030− s⋅( )+
s:=
Laplace de la respuesta a
impulso ∆hn(t) que se
denotará por ∆hns(s) es,
Laplace de la entrada
∆un(t) que se denotará
por ∆uns(s) es,
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
0
Entrada
0
n 0 nf..:=t ti ti
tf ti−
nf
+, tf..:=nf 2000:=ti 0:=tf 2 To⋅:=
+
-
L
e(t)
i(t) C
+
-
v(t) R
Sw(t)
∆unp t( )
0
2
m
∆un t m To⋅−( )∑=
:=Fo1
To
:=To 0.045:=∆un t( ) Φ t( ) 2 Φ t 0.015−( )⋅− Φ t 0.030−( )+:=
Circuito Elevador. Coeficientes de Fourier.Caso 6
Capítulo III - Transformaciones 16 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
1000 500 0 500 10000
0.01
0.02
0.03Mod. (x To) T. de F. de la Sal. Per.
2 π⋅
To
0
1000 500 0 500 1000200
0
200Fase de la T. de F. de la Sal. Per.
2 π⋅
To
0
Coeficientes de Fourier de la salida ∆∆∆∆yn(t) para una entrada periódica ∆∆∆∆un(t) dada.
0 1 2 3 4 5 6 7 8 90
0.5
1
1.5Módulo de los Coeficientes de Fourier
0 1 2 3 4 5 6 7 8 9180
90
0
90
180Fase de los Coeficientes de Fourier
Reconstrucción de la Salida en base a cuatro de los Coeficientes de Fourier.
Sal1234 t( ) 2 ∆ynpn 1( )⋅ cos 1 2⋅ π⋅ Fo⋅ t⋅ arg ∆ynpn 1( )( )+( )⋅ 2 ∆ynpn 2( )⋅ cos 2 2⋅ π⋅ Fo⋅ t⋅ arg ∆ynpn 2( )( )+( )⋅+
2 ∆ynpn 3( )⋅ cos 3 2⋅ π⋅ Fo⋅ t⋅ arg ∆ynpn 3( )( )+( )⋅ 2 ∆ynpn 4( )⋅ cos 4 2⋅ π⋅ Fo⋅ t⋅ arg ∆ynpn 4( )( )+( )⋅++
...:=
Capítulo III - Transformaciones 17 de 31 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
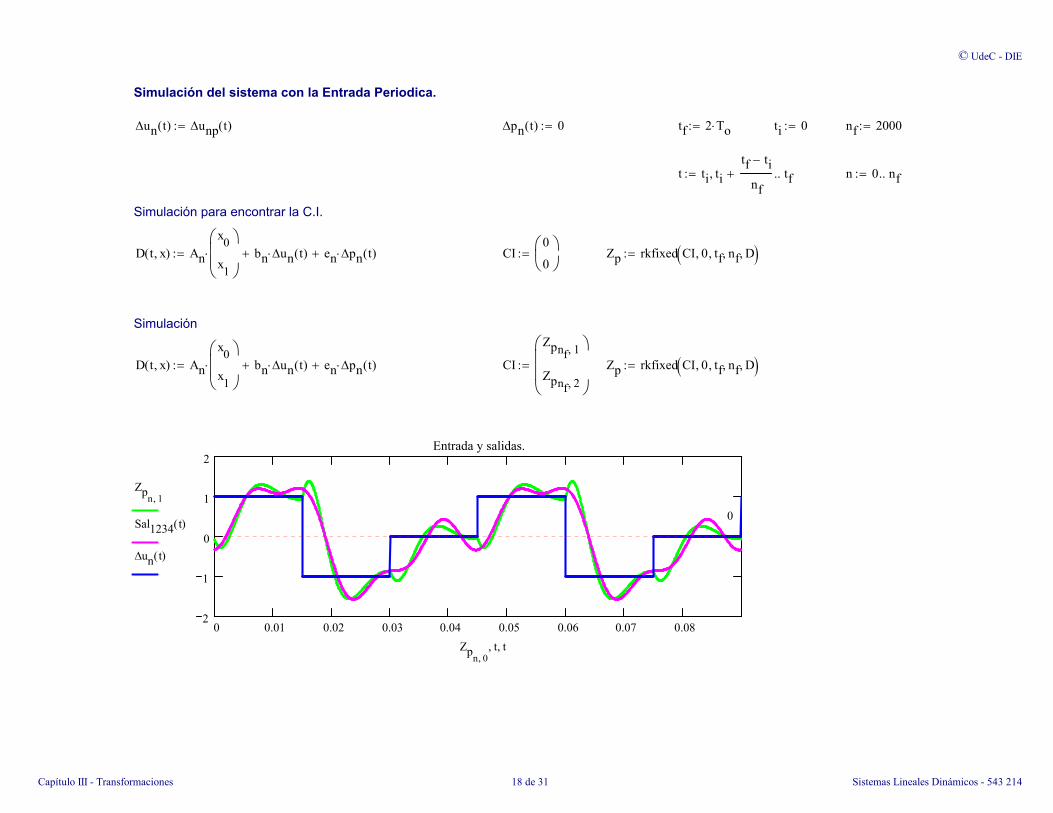
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.082
1
0
1
2Entrada y salidas.
0
Zpn 1,
Sal1234 t( )
∆un t( )
Zpn 0,
t, t,
Zp rkfixed CI 0, tf, nf, D,( ):=CI
Zpnf 1,
Zpnf 2,
:=D t x,( ) An
x0
x1
⋅ bn ∆un t( )⋅+ en ∆pn t( )⋅+:=
Simulación
Zp rkfixed CI 0, tf, nf, D,( ):=CI0
0
:=D t x,( ) An
x0
x1
⋅ bn ∆un t( )⋅+ en ∆pn t( )⋅+:=
Simulación para encontrar la C.I.
n 0 nf..:=t ti ti
tf ti−
nf
+, tf..:=
nf 2000:=ti 0:=tf 2 To⋅:=∆pn t( ) 0:=∆un t( ) ∆unp t( ):=
Simulación del sistema con la Entrada Periodica.
Capítulo III - Transformaciones 18 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
fc z( )T z
1−⋅
1 z1−
−( )2:=fb z( )
1
1 z1−
−:=fa z( ) 1:=
RampaEscalónImpulso
fc z T,( )
0
∞
k
k T⋅ zk−
⋅∑=
T z1−
⋅ 1 2 z1−
⋅+ ....+( )⋅=:= ....fb z T,( )
0
∞
k
fb kT( ) zk−
⋅∑=
:= kTfa z T,( )
0
∞
k
fa k T,( ) zk−
⋅∑=
:=fa
fc k T,( ) k T⋅:=Caso 3fb k T,( ) Φ k T⋅( ):=Caso 2fa k T,( ) δ k T⋅( ):= δ k T⋅( )Caso 1
f z( )
0
∞
k
f kT( ) zk−
⋅∑=
= f 0( ) f T( ) z1−
⋅+ f 2 T⋅( ) z2−
⋅+ f 3 T⋅( ) z3−
⋅+ ....+=
Sea la señal f(kT), entonces la Transformada Z de f(kT), denotada por f(z) = Zf(kT) es,
Transformada Z
0
∞
k
rk−∑
=
2
0
∞
k
r1−( )k∑
=
2
=1
1 r1−
−
2
=
0
∞
k
rk−∑
= 0
∞
k
r1−( )k∑
=
=1
1 r1−
−=por lo tanto:
0
∞
k
rk∑
=
2
1 2 r⋅+ 3 r2
⋅+ 4 r3
⋅+ 5 r4
⋅+ ....+=
0
∞
k
1 k+( ) rk
⋅∑=
=1
1 r−
2
=
0
∞
k
rk∑
=
2
1 r+ r2
+ ....+( ) 1 r+ r2
+ ....+( )⋅= 1 r+ r2
+ ....+( ) r r2
+ r3
+ ....+( )+ r2
r3
+ r4
+ ....+( )+ ....+=
por otro lado:
r 1<si y sólo si
0
∞
k
rk∑
=
1 r+ r2
+ r3
+ ....+ rk
+ ....+=1
1 r−=
La serie infinita:Definiciones
Estudiar la Aplicabilidad de la Transformada Z en Sistemas de Ingeniería.Problema
Transformada Z
Capítulo III - Transformaciones 19 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
Valor Final f k( ) f z( )
∞t
f k( )lim
→ 1z
1 z1−
−( ) f z( )⋅lim
→=
Señales
Periodicasfo k( ) fo z( ) f k( )
0
∞
i
fo k i p⋅−( )∑=
= f z( )1
1 zp−
−fo z( )⋅=
Convolución f k( ) f z( ) g k( ) g z( )
0
∞
i
f i( ) g k i−( )⋅∑=
f z( ) g z( )⋅
Derivación f k( ) f z( ) f k( ) f k 1−( )− 1 z1−
−( ) f z( )⋅
Integración f k( ) f z( )
0
k
i
f i( )∑=
1
1 z1−
−f z( )⋅
Propiedades
Linealidad fa k( ) fa z( ) fb k( ) fb z( ) αa fa k( )⋅ αb fb k( )⋅+ αa fa z( )⋅ αb fb z( )⋅+
Escalamient-
o en tiempof k( ) f z( ) f a k⋅( ) f z
1
a
Despl. en
tiempof k( ) f z( ) f k a−( ) z
a−f z( )⋅
Despl. en
frecuenciaf k( ) f z( ) a
kf k( )⋅ f a
1−z⋅( )
Valor Inicial f k( ) f z( )
0k
f k( )lim
→ ∞z
f z( )lim
→=
Capítulo III - Transformaciones 20 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
fkΩ Ω( ) ej Ω⋅ Tm⋅
T
Tm
1 ej Ω⋅ Tm⋅
1−
−
ej Ω⋅ Tm⋅
T−
Tm
1 ej Ω⋅ Tm⋅
1−
−
−:= ftω ω( ) 2 sin ω T⋅( )⋅
ω:=
ki 12−:= kf 12:= nk kf ki−:= ωi 2.5−π
Tm
⋅:= ωf 2.5π
Tm
⋅:= nω 300:= Ωi 2.5−π
Tm
⋅:= Ωf 2.5π
Tm
⋅:= nΩ 300:= ti ki Tm⋅:= tf kf Tm⋅:=
k ki ki
kf ki−
nk
+, kf..:= ω ωi ωiωf ωi−
nω+, ωf..:= Ω Ωi Ωi
Ωf Ωi−
nΩ+, Ωf..:= t ti ti
tf ti−
nf
+, tf..:=
5 0 50
0.5
1
1.5Señal en el Tiempo Continuo y Discreto
0
10 0 100
2
4
6Señal en Frec. (cont., discr. por Tm)
2 π⋅
Tm
0
Transformada de Fourier (Señales Discretas No-Periodicas)
Problema Estudiar señales discretas en el campo de la frecuencia.
Definiciones Transformada de Fourier
Sea la señal f(kTm), entonces la Transformada de Fourier de f(kTm), denotada por f(Ω) es,
Nótese que corresponde a la Transformada Z (bilateral) de la señal
f(kTm), reemplazando z por ejΩΤm.f Ω( )
∞−
∞
k
f k Tm⋅( ) ej− Ω⋅ Tm⋅ k⋅
⋅∑=
=
Caso 1 T 2:= ft t( ) Φ t T+( ) Φ t T−( )−:= Señal en el Tiempo Tm 0.5:= fk k( ) Φ k Tm⋅ T+( ) Φ k Tm⋅ T−( )−:= Señal Discreta
Transformada Z; por lo
tanto, la Transformada
de Fourier es:
fk2 z( )
∞−
∞
k
f k T⋅( ) zk−
⋅∑=
=z
T
Tm
1 z1−
−
z
T−
Tm
1 z1−
−−=
Transformada de
Fourier Señal
Discreta
Transformada de
Fourier Señal
Continua
Capítulo III - Transformaciones 21 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
10 0 100
1
2
3Señal en Frec. (cont., discr. por Tm)
2 π⋅
Tm
0
5 0 50
0.5
1
1.5Señal en el Tiempo Continuo y Discreto
0
t ti ti
tf ti−
nf
+, tf..:=Ω Ωi Ωi
Ωf Ωi−
nΩ+, Ωf..:=ω ωi ωi
ωf ωi−
nω+, ωf..:=k ki ki
kf ki−
nk
+, kf..:=
tf kf Tm⋅:=ti ki Tm⋅:=nΩ 300:=Ωf 3π
Tm
⋅:=Ωi 3−π
Tm
⋅:=nω 300:=ωf 3π
Tm
⋅:=ωi 3−π
Tm
⋅:=nk kf ki−:=kf 12:=ki 12−:=
ftω ω( ) 2
1 ω2
+
:=T. de F.
Señal Continua
T. de F.
Señal DiscretafkΩ Ω Tm,( )
exp 2 Tm⋅( ) 1−( )−
2 exp Tm( )⋅ cos Ω Tm⋅( )⋅ exp 2 Tm⋅( )− 1−:=fkΩ Ω( )
exp 2 Tm⋅( ) 1−( )−
2 exp Tm( )⋅ cos Ω Tm⋅( )⋅ exp 2 Tm⋅( )− 1−=
fkΩ Ω( )∞−
∞
k
fk k Tm⋅( ) ej− Ω⋅ Tm⋅ k⋅
⋅∑=
=
0
∞
k
ek− Tm⋅
ej− Ω⋅ Tm⋅ k⋅
⋅∑= 0
∞
k
ek− Tm⋅
ej Ω⋅ Tm⋅ k⋅
⋅∑=
+ 1−=1
1 exp Tm− 1 j Ω⋅+( )⋅ −
1
1 exp Tm 1− j Ω⋅+( )⋅ −+ 1−=
Señal discretafk k( ) ek Tm⋅−
:=Tm 0.5:=Señal continuaft t( ) et−
:=Caso 2
Capítulo III - Transformaciones 22 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
10 0 100
1
2
3Señal en Frec. (cont., discr. por Tm)
2 π⋅
Tm
0
5 0 50
0.5
1
1.5Señal en el Tiempo Continuo y Discreto
0
Ω Ωi Ωi
Ωf Ωi−
nΩ+, Ωf..:=ω ωi ωi
ωf ωi−
nω+, ωf..:=k ki ki
kf ki−
nk
+, kf..:=
nΩ 300:=Ωf 6π
Tm
⋅:=Ωi 6−π
Tm
⋅:=nω 300:=ωf 6π
Tm
⋅:=ωi 6−π
Tm
⋅:=nk kf ki−:=kf 6:=ki 6−:=
Señal discretafk k( ) ek Tm⋅−
:=Tm 1:=Señal continuaft t( ) et−
:=Caso 3
10 0 100
1
2
3Señal en Frec. (cont., discr. por Tm)
2 π⋅
Tm
0
5 0 50
0.5
1
1.5Señal en el Tiempo Continuo y Discreto
0
Capítulo III - Transformaciones 23 de 31 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
Transformada de Fourier (Señales Discretas Periodicas)
Problema Estudiar señales discretas periodicas en el campo de la frecuencia.
Definiciones Transformada de Fourier para Señales Discretas Periodicas
Sea la señal f(kTm) de periodo Ωo, entonces la Transformada de Fourier de f(kTm), denotada por f(mΩo) es,
Nótese que corresponde a la
T. de F. para un periodo de la
señal evaluada en frecuencias
múltiples de Ωο. Nótese que
Fο = 1/To, donde To/Tm = N.
f mΩo( ) 1
N0
N 1−
k
f k T⋅( ) ej− m⋅ Ωo⋅ Tm⋅ k⋅
⋅∑=
⋅= f mΩo( ) 1
N0
N 1−
k
f k T⋅( ) e
j− m⋅2 π⋅
N⋅ k⋅
⋅∑=
⋅=
f Ω( )∞−
∞
k
f k Tm⋅( ) ej− Ω⋅ Tm⋅ k⋅
⋅∑=
=
f m( )
∞−
∞
k
f k Tm⋅( ) ej− m⋅ Ωo⋅ Tm⋅ k⋅
⋅∑=
=
f m( )1
N0
N 1−
k
f k Tm⋅( ) ej− m⋅ Ωo⋅ Tm⋅ k⋅
⋅∑=
⋅=
f m( )1
N0
N 1−
k
f k Tm⋅( ) ej− m⋅
2 π⋅
To
⋅ Tm⋅ k⋅
⋅∑=
⋅=
f m( )1
N0
N 1−
k
f k Tm⋅( ) ej− m⋅
2 π⋅
N⋅ k⋅
⋅∑=
⋅=
Capítulo III - Transformaciones 24 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
10 0 100
2
4
6Frec. (cont. x Tm, discr. x To)
2 π⋅
Tm
0
10 5 0 5 100
0.5
1
1.5Señal Discreta
0
Ω Ωi Ωi
Ωf Ωi−
nΩ+, Ωf..:=k ki ki
kf ki−
kf ki−+, kf..:=
m mi mi
mf mi−
mf mi−+, mf..:=
nΩ 600:=Ωf 2.5π
Tm
⋅:=Ωi 2.5−π
Tm
⋅:=kf 20:=ki 20−:=mf 15:=mi 15−:=
fkpΩ m( )1
N0
N 1−
k
fkp k( ) e
j− m⋅2 π⋅
N⋅ k⋅
⋅∑=
⋅:=NTo
Tm
:=
fkoΩ Ω( ) ej Ω⋅ Tm⋅
T
Tm
1 ej Ω⋅ Tm⋅
1−
−
ej Ω⋅ Tm⋅
T−
Tm
1 ej Ω⋅ Tm⋅
1−
−
−:=
fkp k( )
3−
3
l
fko k lTo
Tm
⋅−
∑=
:=
fko k( ) Φ k Tm⋅ T+( ) Φ k Tm⋅ T−( )−:=
Tm 0.5:=Fo1
To
:=To 6:=T 2:=Caso 1
Capítulo III - Transformaciones 25 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
k ki ki
kf ki−
kf ki−+, kf..:= Ω Ωi Ωi
Ωf Ωi−
nΩ+, Ωf..:= m mi mi
mf mi−
mf mi−+, mf..:=
10 5 0 5 100
1
2
3Señal Discreta
0
10 0 100
2
4
6Frec. (cont. x Tm, discr. x To)
2 π⋅
To
0
Caso 3 T 2:= To 6:= Fo1
To
:= Tm 0.5:= fko k( ) k Tm⋅ T+( ) Φ k Tm⋅ T+( )⋅ 2 k⋅ Tm⋅ Φ k( )⋅− k Tm⋅ T−( ) Φ k Tm⋅ T−( )⋅+:=
T. de F. de la señal
periodica fkp(t) y la no
periodica fko(k).
fkp k( )
3−
3
l
fko k lTo
Tm
⋅−
∑=
:= NTo
Tm
:= fkpΩ m( )1
N0
N 1−
k
fkp k( ) e
j− m⋅2 π⋅
N⋅ k⋅
⋅∑=
⋅:= fkoΩ Ω( )10−
10
k
fko k( ) ej− Ω⋅ Tm⋅ k⋅
⋅∑=
:=
10 5 0 5 100
1
2
3Señal Discreta
0
10 0 100
2
4
6Frec. (cont. x Tm, discr. x To)
2 π⋅
Tm
0
Caso 2 T 2:= To 4:= Fo1
To
:= Tm 0.5:= fko k( ) k Tm⋅ T+( ) Φ k Tm⋅ T+( )⋅ 2 k⋅ Tm⋅ Φ k( )⋅− k Tm⋅ T−( ) Φ k Tm⋅ T−( )⋅+:=
T. de F. de la señal
periodica fkp(t) y la no
periodica fko(k).
fkp k( )
3−
3
l
fko k lTo
Tm
⋅−
∑=
:= NTo
Tm
:= fkpΩ m( )1
N0
N 1−
k
fkp k( ) e
j− m⋅2 π⋅
N⋅ k⋅
⋅∑=
⋅:= fkoΩ Ω( )10−
10
k
fko k( ) ej− Ω⋅ Tm⋅ k⋅
⋅∑=
:=
ki 20−:= kf 20:= Ωi 2.5−π
Tm
⋅:= Ωf 2.5π
Tm
⋅:= nΩ 300:= mi 15−:= mf 15:=
Capítulo III - Transformaciones 26 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
8 6 4 2 0 2 4 6 80
1
2Fourier Discreto
0
4 2 0 2 45
0
5Señal Discreta
0
m mi mi
mf mi−
mf mi−+, mf..:=Ω Ωi Ωi
Ωf Ωi−
nΩ+, Ωf..:=k ki ki
kf ki−
kf ki−+, kf..:=
mf 8:=mi 8−:=nΩ 300:=Ωf 1π
Tm
⋅:=Ωi 1−π
Tm
⋅:=kf 50:=ki 50−:=
fkpΩ m( )1
N0
N 1−
k
fkp k( ) e
j− m⋅2 π⋅
N⋅ k⋅
⋅∑=
⋅:=NTo
Tm
:=fkp k( )
3−
3
l
fko k lTo
Tm
⋅−
∑=
:=T. de F. de la señal
periodica fkp(k).
fko k( ) 3.0000 sin 1 2⋅ π⋅ To1−
⋅ k⋅ Tm⋅
⋅ Φ k Tm⋅( ) Φ k Tm⋅ To−( )−( )⋅
0.5− sin 3 2⋅ π⋅ To1−
⋅ k Tm⋅( )⋅
⋅ Φ k Tm⋅( ) Φ k Tm⋅ To−( )−( )⋅+
...
1.0− sin 5 2⋅ π⋅ To1−
⋅ k Tm⋅( )⋅
⋅ Φ k Tm⋅( ) Φ k Tm⋅ To−( )−( )⋅+
...
:=Tm 0.1:=Fo1
To
:=To 6:=T 2:=Caso 4
Capítulo III - Transformaciones 27 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
0 2 4 6 8 10 12 14 160
2
4
Fourier Discreto (por 2)
34
π⋅ cos
T
To
2⋅ π⋅
⋅
0 2 4 65
0
5Señal Discreta
0
T
m mi mi
mf mi−
mf mi−+, mf..:=Ω Ωi Ωi
Ωf Ωi−
nΩ+, Ωf..:=k ki ki
kf ki−
kf ki−+, kf..:=
mf 16:=mi 0:=nΩ 300:=Ωf 1π
Tm
⋅:=Ωi 1−π
Tm
⋅:=kf 30:=ki 0:=
fkpΩ m( )1
N0
N 1−
k
fkp k( ) e
j− m⋅2 π⋅
N⋅ k⋅
⋅∑=
⋅:=NTo
Tm
:=fkp k( )
3−
3
l
fko k lTo
Tm
⋅−
∑=
:=T. de F. de la señal
periodica fkp(k).
fko k( ) 3 Φ k Tm⋅ T−( ) Φ k Tm⋅To
2T−
−
−
Φ k Tm⋅To
2T+
−
− Φ k Tm⋅ To T−( )− ++
...
⋅:=Tm 0.2:=Fo1
To
:=To 6:=T 0.5:=Caso 5
Capítulo III - Transformaciones 28 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
en
0
R
L1 do−( )2⋅
:= cn 1 0( ):=
∆un t( ) Φ t( ) 2 Φ t 0.015−( )⋅− Φ t 0.030−( )+:= To 0.045:= Fo1
To
:= Entrada
∆unp t( )
0
2
m
∆un t m To⋅−( )∑=
:= ti 0:= tf 2 To⋅:= nf 1500:= t ti ti
tf ti−
nf
+, tf..:=
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
0
Entrada
0ni 10−:= nf 10:=
n ni ni
nf ni−
nf ni−+, nf..:=
T. de F. de la salida periodica ∆∆∆∆ynp(t) que se denotará por ∆ynpn(n) es,
∆ynpn n( )1
To
kp
2− ζ⋅ ωn⋅ j 2 n⋅ π⋅ Fo⋅( )⋅ ⋅ ωn2
+
j 2 n⋅ π⋅ Fo⋅( )⋅ 2
2 ζ⋅ ωn⋅ j 2 n⋅ π⋅ Fo⋅( )⋅ ⋅+ ωn2
+
⋅1 2 exp 0.015− j 2 n⋅ π⋅ Fo⋅( )⋅ ⋅ ⋅− exp 0.030− j 2 n⋅ π⋅ Fo⋅( )⋅ ⋅ +
j 2 n⋅ π⋅ Fo⋅( )⋅⋅
⋅ 109−
+:=
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5Módulo de los Coeficientes de Fourier
0 1 2 3 4 5 6 7 8 9 10300
150
0
150
300Fase de los Coeficientes de Fourier
Coeficientes de Fourier de la salida
∆∆∆∆yn(t) para una entrada periódica ∆∆∆∆un(t) dada.
Caso 6 Circuito Elevador. Coeficientes de Fourier.
L 5 103−
⋅:= C 200 106−
⋅:= R 12:= ∆d1 0.2−:= do 0.5:= eo 6:= ∆e 1:= ∆d2 0.2:=
vo
eo
1 do−:= io
vo
R 1 do−( )⋅:= uo do:= po eo:= ωn
1
L C⋅1 do−( )⋅:= kp
do
1 do−:= ζ
L C⋅
2 R⋅ C⋅ 1 do−( )⋅:=
+
-
L
e(t)
i(t) C
+
-
v(t) R
Sw(t) An
1−
R C⋅
R−
L1 do−( )2⋅
1
R C⋅
0
:= bn
do−
R C⋅ 1 do−( )⋅
R
L1 do−( )⋅ do⋅
:=
Capítulo III - Transformaciones 29 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.082
1
0
1
2Entrada y salidas.
0
fkp k( ) Zp
k
nf
kf
⋅ 1,
:=k ki ki
kf ki−
kf ki−+, kf..:=kf
tf
Tm
:=ki 0:=Tm 0.0045:=Muestreo
Zp rkfixed CI 0, tf, nf, D,( ):=
CI
Zpnf 1,
Zpnf 2,
:=Zp rkfixed CI 0, tf, nf, D,( ):=CI0
0
:=D t x,( ) An
x0
x1
⋅ bn ∆un t( )⋅+ en ∆pn t( )⋅+:=
n 0 nf..:=t ti ti
tf ti−
nf
+, tf..:=nf 1500:=ti 0:=tf 2 To⋅:=∆pn t( ) 0:=∆un t( ) ∆unp t( ):=Simulación
Sal1234 t( ) 2 ∆ynpn 1( )⋅ cos 1 2⋅ π⋅ Fo⋅ t⋅ arg ∆ynpn 1( )( )+( )⋅ 2 ∆ynpn 2( )⋅ cos 2 2⋅ π⋅ Fo⋅ t⋅ arg ∆ynpn 2( )( )+( )⋅+
2 ∆ynpn 3( )⋅ cos 3 2⋅ π⋅ Fo⋅ t⋅ arg ∆ynpn 3( )( )+( )⋅ 2 ∆ynpn 4( )⋅ cos 4 2⋅ π⋅ Fo⋅ t⋅ arg ∆ynpn 4( )( )+( )⋅++
...:=Salida en
base a 4
coef. de la
T.F.
Capítulo III - Transformaciones 30 de 31 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
T.F.D. NTo
Tm
:= mi 0:= mf N:= m mi mi
mf mi−
mf mi−+, mf..:= fkpΩ m( )
1
N0
N 1−
k
fkp k( ) e
j− m⋅2 π⋅
N⋅ k⋅
⋅∑=
⋅:=
0 2 4 6 8 100
0.5
1
1.5Módulo de los Coeficientes de Fourier
0 2 4 6 8 10300
150
0
150
300Fase de los Coeficientes de Fourier
Salida en
base a 4
coef. de la
T.F.D.
Sal1234d t( ) 2 fkpΩ 1( )⋅ cos 1 2⋅ π⋅ Fo⋅ t⋅ arg fkpΩ 1( )( )+( )⋅ 2 fkpΩ 2( )⋅ cos 2 2⋅ π⋅ Fo⋅ t⋅ arg fkpΩ 2( )( )+( )⋅+
2 fkpΩ 3( )⋅ cos 3 2⋅ π⋅ Fo⋅ t⋅ arg fkpΩ 3( )( )+( )⋅ 2 fkpΩ 4( )⋅ cos 4 2⋅ π⋅ Fo⋅ t⋅ arg fkpΩ 4( )( )+( )⋅++
...:=
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.082
1
0
1
2Entrada y salidas.
0
Zpn 1,
Sal1234 t( )
Sal1234d t( )
Zpn 0,
t, t,
Capítulo III - Transformaciones 31 de 31 Sistemas Lineales Dinámicos - 543 214