U T C Manual090925.pdf · 2009. 11. 4. · u t c 運動控制器說明書 軟體手冊 v2.2 版...
194
U U T T C C 運動控制器說明書 軟體手冊 V2.2 版 微鋒自動科技股份有限公司 台北市南港區115成功路一段78號3樓 TEL:(02)27882162 FAX:(02)27857173 2009.09.25
Transcript of U T C Manual090925.pdf · 2009. 11. 4. · u t c 運動控制器說明書 軟體手冊 v2.2 版...
-
UU TT CC
運動控制器說明書 軟體手冊
V2.2 版
微鋒自動科技股份有限公司 台北市南港區115成功路一段78號3樓 TEL:(02)27882162 FAX:(02)27857173 2009.09.25
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
1
目錄
UTC400控制器規格…………………………………………………………… 3 應用範圍………………………………………………………………………… 4 運算能力………………………………………………………………………… 5
數值………………………………………………………………………….. 5 運算子……………………………………………………………………….. 5 運算函式…………………………………………………………………….. 5 運算式……………………………………………………………………..... 8 資料………………………………………………………………………….. 8 比較子……………………………………………………………………….. 8 比較元……………………………………………………………………….. 8 時計………………………………………………………………………….. 8 變數………………………………………………………………………….. 9
馬達寸動………………………………………………………………………… 13 PID 參數調整……………………………………………………………….. 14 PID 參數調程序………………………………………….…………….…… 16
運動程式………………………………………………………………………… 18 PLC程式……………………………………………………………………….. 22 載入/執行儲存/備分程式 PLC…………………………….………….…… 22
路徑規畫………………………………………………………………………… 26 位置跟隨……………………………………………………………….…… 29 時間跟隨……………………………………………………………….…… 30
參數及變數…………………………………………………….……………….. 32 I 參數摘要…………………………….………….………………………..… 32 參數設定………………..…………….………….………………………..… 34
系統 I 參數……………..…………….………..…………………..… 34 馬達 I 參數……………..…………….………..…………………..… 43 座標系統 I 參數……………..…………….…………………..…..… 56 編碼器 I 參數………………..…………….…………………..…..… 61
即時命令………………………………………………………………………… 64 整體即時命令………………………………………………………….…… 64 座標系統即時命令…………………………………………………….…… 65 馬達即時命令………………………………………………………….…… 66 程式指標控制命令…………………………………………………….…… 66
運動程式命令…………………………………………………………………… 67 PLC程式命令………………………………………………………………….. 69
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
2
指令命令……………………………………………………………………….. 70 即時命令摘要………………………………………………………….…… 70 即時命令格式及說明…………………………………………………….… 70
程式命令……………………………………………………………………….. 102 程式命令摘要………………………………………………………….…… 102 程式命令格式及說明…………………………………………………….… 104
附錄……………………………………………………………………….…….. 136 傳輸程式範例………………………………………………………….…… 136 建議 M 參數定義……………………………………………………….…… 138 程式範例…………………………….………………………………….…… 143
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
3
UTC400TM控制器規格:
兩組串列傳輸埠 RS-232,最高傳輸速率可達 115200bps
內建光偶合隔離 I/O,並可外接多片擴充板
軟硬體正負行程極限,原點信號輸入
總記憶容量 4M Bits,可擴增為 16M Bits
4M Bits 快閃記憶體及後援電池雙重備份裝置
兩組+/- 10V 類比信號輸出/輸入
ASCII碼指令集,高階程式語法
內建有 8組計時器(Timers)及 4096個變數
可內存 256組運動程式,16組 PLC程式
先進伺服控制架構,可有效抑制運動中及靜止時之跟隨誤差及穩定度
系統工作頻率:32MHZ
伺服取樣時間:1ms
最高輸出脈衝速率:2M pps
電子齒/凸輪應用功能
可定義獨立或共用座標系統
具 S-曲線加減速,快速位移,直線、圓弧、Spline補間,Blend運動功能
具 Look Ahead功能
具間隙補償功能
具雙回授控制架構
具 DNC及直接命令指令群
具 Password系統規劃保護功能
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
4
應用範圍
封切機
點膠機
車床
銑床、雕刻機
毛刷機
雷射切割機
車床送料機
木材裁切機
飛剪
印花機
印刷機
圓鋸研磨機
燙金機
沖床送料機
軋合機
PC板加工機
包裝標籤機
鋼板裁切機
分度盤
繞線機
鑽孔機
泡棉切割
射出機
彈簧機
電子機械
特殊專用機
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
5
運算能力
因為 DSP超強的數學運算能力,我們可以直接使用 UTC400上內含的多種數學函式來提高在複雜應用上的速度,這樣我們可以避免在 PC處理完運算,然後再送至控制器所造成的延遲。以下就是 UTC400所提供的各類變數及運算功能: 數值: (numerical values)
TMS320C32為 32-bit的數位信號處理器,所以其內部的整數或浮點數皆以 32 bit表示,合理的數值輸入如:
1234 3
03 (0起始的數值也可以) -27.656 0.001 .001 (小數點前的 0可以省略) $ff00 (錢字號起始的數值表示 16進制)
運算子: (operators)
四則運算(Arithmetic) +, −, ∗, / 求餘數(Modula) % 邏輯運算(Bit-by-bit Boolean) &, |, ^
運算函式: (functions)
三角函數(Trigonometric) SIN, COS, TAN 反三角函數 ASIN, ACOS, ATAN, ATAN2 對數(Logarithmic) LN, EXP 其他(Others) SQRT, FABS, INT, ROUND
SIN Function Standard trigonometric sine function
Syntax SIN({expression}) Domain All real numbers Domain units Degrees Range -1.0 – 1.0 Range units None Possible errors None
COS Function Standard trigonometric cosine function Syntax COS({expression}) Domain All real numbers Domain units Degrees
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
6
Range -1.0 – 1.0 Range units None Possible errors None
TAN Function Standard trigonometric tangent function Syntax TAN({expression}) Domain All real numbers except ± 90, 270, … Domain units Degrees Range All real numbers Range units None Possible errors Divide by zero on illegal domain
ASIN Function Inverse sine (arc-sine) function Syntax ASIN({expression}) Domain -1.0 –1.0 Domain units None Range -90 – 90 Range units Degrees Possible errors Illegal domain
ACOS Function Inverse cosine (arc-cosine) function Syntax ACOS({expression}) Domain -1.0 –1.0 Domain units None Range 0 – 180 Range units Degrees Possible errors Illegal domain
ATAN Function Inverse tangent (arc-tangent) function Syntax ATAN({expression}) Domain All real numbers Domain units None Range -90 – 90 Range units Degrees Possible errors None
ATAN2 Function Expanded arc-tangent function, the cosine value is stored in Q0, and the sine value in parenthesis.
It is distinguished from the standard ATAN function by the use of two arguments. The advantage of this function is that it has a full 360 degree range.
Syntax ATAN2({expression}) Domain All real numbers Domain units None Range -180 – 180 Range units Degrees Possible errors None
LN Function Natural logarithm function (base e) Syntax LN({expression}) Domain All positive real numbers
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
7
Domain units None Range All real numbers Range units None Possible errors Illegal domain
EXP Function Exponentiation function (ex) Note: To implement the yx function, use ex ln(y)
instead. A sample expression would be EXP(P2*LN(P1)) to implement the function P1P2
Syntax EXP({expression}) Domain All real numbers Domain units None Range All positive real numbers Range units None Possible errors None
SQRT Function Square root function Syntax SQRT({expression}) Domain All non-negative real numbers Domain units None Range All non-negative real numbers Range units None Possible errors Illegal domain
FABS Function Absolute value function Syntax FABS({expression}) Domain All real numbers Domain units None Range All non-negative real numbers Range units None Possible errors None
INT Function Truncation function, which returns the greatest integer less than or equal to the argument.
(INT(3.6) = 3, INT(-3.2) = -4) Syntax INT({expression}) Domain All real numbers Domain units None Range All integer numbers Range units None Possible errors None
ROUND Function Round off function, which returns the nearest integer to the argument.
(ROUND(3.6) = 4, ROUND(-3.2) = -3) Syntax ROUND({expression}) Domain All real numbers Domain units None Range All integer numbers Range units None Possible errors None
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
8
運算式: (expressions) 由定值,變數,運算子,運算函式所組成. 如:
512 P1 P1-Q18 1000*COS(Q25*180/3.14159) I101*FABS(M347)/ATAN(P(Q3+1)/6.28)+5 資料: (data) 資料表示一不含任何括弧的定值,或是包含在括弧裏的運算式. 如 X{data}
可以是:
X100 X(P1+250*P2) X(100) (合法但括弧會被捨去) 比較子: (comparators) 用來比較兩個數值或運算式的關係
= (等於) != (不等於) < (小於) (小於等於) > (大於) >= 或 !< (大於等於)
比較元: (conditions)
簡單 - 兩個運算式加一個比較子,如:
WHILE (1 < 2) IF (P1 > 5000) WHILE (SIN(P2-P1) -20 AND P1 < 20) WHILE (P80 = 0 OR I102 > 300 AND I102 < 500) IF (Q16 !< Q17 AND Q16 !> Q18 OR M136 < 256 AND M137 < 256)
時計: (timers) 建議變數 M0 : 中斷計數器,每 millisecond增加 1 建議變數 M71..M78(時計 1..8) : 每 millisecond減少 1
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
9
變數: (variables) UTC400 有五種不同的參數,每一種參數的特性分述如下,我們可以在任何時候用即時命令,或是在運動程式中去設定任何參數值,設定方法為:
{variable} = {data} 例如: I102 = 45 I101 = I102+P25*3 P200 = SQRT(Q200/10) Q400..500 = 0
I-Variables I0 - I1023, 每一個 I 參數皆有其特定的功用. Initialization and set-up: I0 – I20: General card setup I101 – I120: Motor #1 setup I150 – I170: C.S. 1 setup I201 – I220: Motor #2 setup I250 – I270: C.S. 2 setup I301 – I320: Motor #3 setup I350 – I370: C.S. 3 setup I401 – I420: Motor #4 setup I450 – I470: C.S. 4 setup
P-Variables P0 - P1023 整體一般使用者變數(每個座標系統使用相同的變數) 32-bit 浮點數格式 陣列讀取: P變數可以很容易地被當成陣列資料讀取進來,只要使用
P({expression})語法取代 P{constant}即可. 例如我們要移動馬達而所有位置依序存放在 P101至 P200的變數裏,我們可以使用以下的程式範例:
P1 = 101 WHILE (P1 < 201) X(P(P1)) DWELL100 P1 = P1 + 1 ENDW
陣列寫入: 在 UTC400中欲以陣列方式寫入 P變數必須使用較特殊的技巧,首先我們設定一 M變數指向 P0,例如 M80->L:1000,然後再用另一 M變數指向剛剛那個 M變數的定義字元中的最低 12個 bit,例如M81->C50,0,12 ($C50為 M80定義字元的存放位址). 以上範例定義完成後,一旦我們設定M81的值, M80即指向P(M81)的位置,改變
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
10
M80的值就等於改變 P(M81)的值. 使用剛才的M變數定義,以下範例介紹如何建立一 sine table並將其值存放在 P0至 P359中:
P1000 = 0 WHILE (P1000 < 360) M81 = P1000 M80 = SIN(P1000) P1000 = P1000 + 1 ENDW Date 20040401以後的版本可以直接在等號左邊以 P{variable}={data} 方式做陣列寫入的動作,其中 variable可以是
I,P,Q,M中任一種, 例如: P(P100)=P1+123.45 P(Q1)=P(Q2)
Q-Variables Q0 - Q1023 區域一般使用者變數(每個座標系統使用到不同的變數) 程式參數傳遞變數 32-bit 浮點數格式 陣列讀取及寫入方式請參考 P變數 以下為不同座標系統間 Q變數實際位置對照表,多座標系統的應用應小心避免使用到重複的變數位置.(如兩個座標系統只能使用 Q0到 Q511,四個座標系統只能使用 Q0到Q255…等)
Mem. Loc.
Coord.Sys. 1
Coord.Sys. 2
Coord.Sys. 3
Coord. Sys. 4
$1400 0 512 768 256 … … … … …
$147F 127 639 895 383 $1480 128 640 896 384
… … … … … $14FF 255 767 1023 511 $1500 256 768 0 512
… … … … … $157F 383 895 127 639 $1580 384 896 128 640
… … … … … $15FF 511 1023 255 767 $1600 512 0 256 768
… … … … … $167F 639 127 383 895 $1680 640 128 384 896
… … … … …
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
11
$16FF 767 255 511 1023 $1700 768 256 512 0
… … … … … $177F 895 383 639 127 $1780 896 384 640 128
… … … … … $17FF 1023 511 767 255
R-Variables R0 – R8191 存放在 nvRAM位置, 必須安裝 nvRAM才有作用 整體一般使用者變數(每個座標系統使用相同的變數) 32-bit 浮點數格式 R0..1023可以直接存取, R1024..8191則必須透過陣列方式存取. R1000=123.45 P100=R1000*SQRT(P1) Q1=4000 R(Q1)=P100*2 P101=R(Q1)
M-Variables M0 - M1023 用來指向記憶體位址及 I/O: Inputs, outputs, counters, A/D, D/A, RAM.
格式: 31
30
29
28
27
26
25
24
23
22
21
20
Address- M 參數指向位址, 範圍 0000-FFFF Type- 指向記憶體種類 0: 不指向任何位址,可當一般變數使用 1: 一般資料區(Data Segment), DP = 00 2: I/O位址區, DP = FF Start Bit- 指向位址的起始位元, 範圍 0-31 Width- 指向位址的位元寬度, 範圍 0-31 Sign- 1: 指向資料為有號數(signed)
Address Type Start Bit Width Sign
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
12
0: 指向資料為無號數(unsigned) Bit 31- 0: 指向資料為整數 1: 指向資料為浮點數 命令格式: Mxx->* 不指向任何位址,可當一般變數使用(有號整數值) Mxx->addr[, start][, width][,s] 指向一般資料區,數值為整數 Mxx->L:addr 指向一般資料區,數值為浮點數 Mxx->I: addr[, start][, width][,s] 指向 I/O位址區 Mxx-> 傳回目前 M 參數定義 Mxx 傳回目前 M 參數值 Mxx = value 設定 M 參數值
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
13
馬達寸動
UTC400開機完成後,如果馬達沒有碰到極限,而且沒有驅動器錯誤信號進來的話(我們可以用 Ix09去設定這些信號是否致能和極性),我們就可以用寸動指令去任意移動馬達,但是馬達正在執行運動程式中不允許任何寸動指令,除非我們先用S指令讓馬達單步停止.
指定寸動馬達: ( addressing motor ) 在下達寸動指令前我們必須先指定要針對那一軸馬達動作,此時我們可以用#{const}指令達到此目的.例如#1表示以後所有指令都是針對第一軸馬達, #2表示以後所有指令都是針對第二軸馬達等.
驅動器致能: ( driver enable ) 開機預設狀態為每一軸馬達驅動器都是禁能的狀態(實際驅動器致能的輸出的極性可以由 Ix09 設定),我們可以隨時用 K 指令去禁能(disable)馬達,或是用 J/指令使馬達致能,但是唯有在馬達致能的狀態下才能寸動馬達. 在執行運動程式前也會先檢查所有定義的馬達是否為致能的狀態,如果有任何一軸不是,則會產生一錯誤訊息.
寸動加減速: ( jog acceleration )
寸動加減速時間由 Ix01和 Ix02決定, Ix02為 S曲線加速時間, Ix01必須大於等於Ix02的值,而且兩者不能同時設成 0.
寸動速度: ( jog speed )
寸動速度快慢由 Ix03決定,其值愈大速度就愈快(單位: counts/msec),改變正負號會同時改變正寸動和負寸動的方向,但是建議永遠將此值設為正數而由 Ix09 來改變正負的方向.
寸動命令: ( jog commands )
J+ 一直往正方向寸動 J- 一直往負方向寸動 J/ 停止寸動 J={const} 寸動到指定的位置(單位: counts) J:{const} 從目前位置再寸動指定的距離(單位: counts) J= 寸動到變數指定的位置(建議使用 Mx63指向此變數) J: 從目前位置再寸動變數指定的距離(建議使用 Mx63指向此變數) J* 寸動回程式單步停止時的位置(如果在程式執行中寸動馬達
的話可以用此指令回原來的地方)
原點復歸: ( home searching ) 基本上原點復歸的動作還是採用寸動的加減速設定,只不過其速度是由 Ix07 來設定,當 Ix07為正時往正方向找原點, 當為負時則往負方向找原點.完整的原點復歸步驟如下:
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
14
(i). 脈衝模式 1. 使用者下達 HM指令 2. 依據 Ix07設定的速度及方向開始找原點 3. 偵測到觸發信號(觸發信號如何產生由 Ix81設定)時,立即記錄目前原點開關的
狀態,並且以 Ix01, Ix02設定的減速時間減速停止. 4. 以 Ix07設定的速度回到偵測到的觸發信號位置 5. 檢查原點開關的狀態,如果和步驟 3記錄到的狀態不一致,設定原點旗標錯誤狀
態(建議 M變數 Mx46),跳至步驟 7. 6. 以每次一個脈衝的速度(脈衝間的延遲時間可由 Ix18設定,當 Ix18等於 1時,
速度為 1k pps) 繼續往前直到觸發信號再次產生為止. 7. 馬達以 Ix07設定的速度移動 Ix08指定的偏移量. 8. 將目前位置設定成機械原點座標並設定原點復歸完成旗標(建議 M變數
Mx45). (ii). 閉迴路模式 1. 使用者下達 HM指令 2. 依據 Ix07設定的速度及方向開始找原點 3. 偵測到觸發信號(觸發信號如何產生由 Ix81設定)時,立即抓取目前原點觸發的
位置,並且以 Ix01, Ix02設定的減速時間減速停止. 4. 馬達以 Ix07設定的速度移動到抓取的位置加上 Ix08指定的偏移量. 5. 將目前位置設定成機械原點座標並設定原點復歸完成旗標(建議 M變數
Mx45). 因為觸發位置的抓取是由硬體來處理,所以其誤差只是電子暫存器資料轉存所需的時間,幾乎可以被忽略.因此我們可用很快的速度找到機械原點的位置,而且在不同的速度下我們皆能找到非常準確的原點位置.
一. PID 參數調整: 在此之前步驟已將伺服閉迴路,其 PID 參數使用系統建議之馬達空載時之建議值,於系統加載時,應微調其值以得較佳之性能相關參數:
Ix20 比例增益值(Kp)
此參數提供一個與位置跟隨誤差成正比的控制反應,其效用有如電子式彈簧,主要
是增加系統剛性。 足夠大的 Ix20 可縮小位置跟隨誤差並使馬達有較佳的保持定位能力,但過大的Ix20 會引起系統對跟隨誤差的過度反應,導致劇烈抖動或嗡鳴聲,甚至震盪而跳脫。反之,太小的 Ix20 使馬達顯得軟弱無力,跟隨誤差亦大,無法克服負載的變化。Ix20一般是往上調到馬達定位剛性足夠,但尚未產生震盪之時即可。
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
15
Ix21 微分增益值(Kd)
此參數提供一個與馬達實際速度(Actual Velocity)成正比的反向控制反應,其效用有如電子式阻尼,主要是增加系統穩定性。 Ix21 愈大,阻尼效應愈強。適當的 Ix21 可抑制因 Ix20(Kp)快速反應而產生的Overshoot,使系統能兼顧快速反應與穩定性。過大的 Ix21同樣會引起系統的過度反應,導致劇烈抖動或嗡鳴聲,而太小的 Ix21則無法克服 Overshoot現象。一般是先調好 Ix20(Kp),再逐步調高 Ix21 (Ix22 亦請同步調整 ),使其達到:靜止時不震動,快速定位時無 Overshoot,即可。 Ix22 速度前饋增益值(Kvff)
此參數提供一個與馬達命令速度(Command Velocity)成正比的控制反應,主要是降低因 Ix21(Kd)阻尼特性而造成的循跡誤差。 Ix22一般都設成比 Ix21(Kd)稍大,然後根據較高的速度,微調 Ix22,使馬達在正轉及反轉時,都能得到盡可能接近零的跟隨誤差(通常高速下調好之參數,低速時亦適用;但調好後若再加大 Ix20,則 Ix22 應往 Ix21 靠近的方向微調,以保持正反轉時接近零的跟隨誤差)。
Ix23 積分增益值(Ki)
此參數提供一個與馬達跟隨誤差累積量(Integral Following Error)成正比的控制反應,主要是消除穩態誤差。 過大的 Ix23會引起系統對跟隨誤差累積量的過度反應,導致劇烈抖動或嗡鳴聲,而太小的 Ix23則於穩態時定位較慢或克服不了摩擦而殘留穩態誤差,造成定位失準。
Ix24 積分模式
當積分模式 Ix24=1,跟隨誤差累積的動作只在命令速度為零時才做。 當積分模式 Ix24=0,跟隨誤差隨時都在累積並作用。 雖然後者可以帶來運動中保持較小跟隨誤差的機會,但若使用場合不當,可能反而
造成系統運動中的不穩定。
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
16
Ix25 加速度前饋增益值(Kaff)
此參數提供一個與馬達命令加速度(Command Acceleration)成正比的控制反應,主要是降低因系統慣量所引起的循跡誤差。
Ix29 扭力命令偏移量
此參數作用在閉回路及開回路模式下,在依正常演算法則所得之扭力命令送出前,
另加上一扭力命令偏移量。
Ix30 最大容許扭力命令
此參數定義位置迴路輸出到電流迴路命令的最大輸出值,輸出值若大於此值則限制於此數值,其範圍為-32768~32767, 32767 代表可允許的控制器最大扭力命令為 ±10Volts(10V 表 100%),內定值為 20480 代表可允許的控制器最大扭力命令為 ±6.25Volts(62.5%)。此參數為扭力命令輸出限制之功能,是此參數應考慮所搭配馬達各別所能承受的最大電流,以免傷及馬達。
Ix31 跟隨誤差跳脫準位(Fatal FE)
此參數為系統安全重要參數。當馬達實際位置與命令位置差距過大,跟隨誤差超過
Ix31設定值時,為了安全起見,系統會停掉馬達動作及運動程式執行,禁能(Disable)該座標系統內所有馬達,使之成為放鬆狀態,並顯示’9’於七段顯示器,待使用者重新下過”A”或”J/ “等可使馬達再度閉回路的指令後,訊息才會清除。
二. PID 參數調整程序:
比例增益 Kp Ix20
以手轉動馬達心軸,軟弱無力時,可以增加 Kp至無法轉動時止,Kp值以每次加倍增加。
微分增益 Kd Ix21
增加Kd的過程中,如馬達有低頻振盪(左右來回轉動),可以每次加倍增加Kd值至穩定止。 如果馬達有高頻哼哼聲,可能 Kp或 Kd太大,可逐次降低。(請參考 Ix20,Ix21 說明)
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
17
積分增益 Ki Ix23
如果馬達靜止時,跟隨誤差(穩態誤差)太太,可逐次加倍增加Ki值直到馬達很快的達到消除穩態誤差,但不可加大到振盪或有哼哼聲。
速度前饋增益值 Kvff Ix22
當以等速寸動時,跟隨誤差(動態誤差)太太時,可以增加 Kvff 來降低。(一般 Ix22相等或略大於 Ix21.)
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
18
運動程式
設定座標系統(Setting Up A Coordinate System)
要在UTC400執行程式,必須先定義一個座標系統,座標系統就是組合馬達來執行程式。
定義一個座標軸
當鍵入&時,UTC400會回報目前的座標系統位址,鍵入&1時,即定址在座標系統 1,此時在鍵入#1→X就是將馬達#1對應到座標系統 X的軸。此時的X軸單位是一個驛碼器單位(Encoder Count) 座標軸單位實用化
如果想將 X軸單位實用化,在定義 X軸時,加入比例常數即可。 舉例說明:馬達的 encoder為 2500PPR以 4倍數解碼,同時您如選用了 10mm/轉 (0.1轉/1mm)的螺桿,這樣就是 1000P/mm,可以在指令#1→1000X,來定義 X軸的單位為 mm。
多軸座標系統
如果您還有另一個馬達,可將它含在同一個座標系統.,如#2→10000Y,即將第 2個馬達定義在座標系統的 Y軸,每一個使用者單位為 10,000 encoder 數。 如果您要定義座標系統的每分鐘進給速率(速度)請參考 Ix54。
寫入運動程式
當您已定義了座標系統,您已完成了書寫程式的準備,OPEN PROG1和CLEAR開啟了程式 1緩衝區並清除了該緩衝區的其他資料,您寫入的程式將保存在程式 1的緩衝區內,下例為一個簡單前進後退運動程式:
LINEAR ; 線性補間 ABS ; 絕對座標運動模式 F50.0 ; 進給率 50mm/分 X200.0 ; 移動 X=200mm X0.0 ; 移動回 X=200mm
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
19
此時的加速度請參考 Ix52,Ix53,當已完成程式寫入時,請加上 CLOSE以離開程式緩衝區。 微鋒公司提供 UTC400軟體程式(UTCPANEL),方便您程式的書寫及系統設定偵錯。
執行運動程式
B1 R或 BIR 假設我們仍在座標系統 1內(&1)B1指到程序 1的啟始位置(Beginning 1) 鍵入 R即開始執行程式(Run) Bn/指令即標示在目前座標系統內欲執行的程式 n/.R指令就是開始執行該程式 n/。
停止程式執行
S(Step)完成該行的運動後才停止,A(About)座標系統內的馬達依參數Ix52, Ix53 立即減速停止.此時指令 R或 S即執行下一行程式,如欲從頭執行該程式,須先下指令 B。
修改程式
通常我們會書寫,下載,執行並確認程式是否正確,UTC400可很快的幫我們再進入書寫器,修改程式.當下載時我們必須確認上次程式是否完成清除,這就是我們在OPEN後必須用 CLEAR指令的原因,以便新程式能完全代替舊程式。 當執行下載時,書寫器內容維持不便,一般我們不會從控制器上載程式,以免破壞書寫器的內容,除非我們想確認程式是否正確下載,或 PC內程式遺失。 通常在書寫器中我們會附加說明。
UTC400的程式語法是一種高階語言,跟 BASIC或 C很類似,而且它可以直接接受 G,M Code,計算式和邏輯判斷的寫法和大部份電腦語言類似,有WHILE迴圈, IF..ELSE跳躍等流程控制指令,運動部份則完全遵循業界的用法. UTC400最多可允許256個程式同時存在本身的記憶體裏,程式間以不同的號碼來區分.程式0是一循迴緩衝區(Rotary Buffer),通常用來模擬邊作邊傳(DNC)的功能;程式1000用來定義G碼(請參考運動命令格式及STDGCODE.UTC);程式1001用來定義M碼;程式1002用來定義T碼,所以建議使用1..999作為一般程式的編號. 假設我們現在開始編寫第1號程式,首先下OPEN PROG 1命令將緩衝區打開, 然後接著輸入所有的NC命令,最後以CLOSE命令將緩衝區關閉.整個程式看起來就像: (分號表示註解)
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
20
OPEN PROG 1 ; 打開緩衝區 CLEAR ; 清除舊有程式 LIN ; 以下步序走直線 F2.36 ; 速度 2.36 (user unit) / min X5.346Y0 ; 正方形第一邊 X5.346Y5.346 ; 第二邊 X0Y5.346 ; 第三邊 X0Y0 ; 第四邊 CLOSE ; 關閉緩衝區 OPEN PROG 1000 CLEAR ; G-Code定義 RPD ; G00 – 快速位移 RET N1000 LIN ; G01 – 直線補間 RET N2000 CIR1 ; G02 – 順時針圓弧補間 RET N3000 CIR2 ; G03 – 逆時針圓弧補間 RET … N90000 ABS ; G90 – 絕對位移模式 RET N90000 INC ; G91 – 相對位移模式 RET N92000 ; G92 – 座標位置設定 READ(X,Y,Z) ; 讀進座標參數 IF (Q100 & 8388608 > 0) ; 檢查 X 參數是否有被讀進來 PSET X(Q124) ; 有的話 X座標設成 Q124的值 ENDIF IF (Q100 & 16777216 > 0) ; 檢查 Y 參數是否有被讀進來 PSET Y(Q125) ; 有的話 Y座標設成 Q125的值 ENDIF IF (Q100 & 33554432 > 0) ; 檢查 Z 參數是否有被讀進來 PSET Z(Q126) ; 有的話 Z座標設成 Q126的值 ENDIF RET 我們也可以用任何一種編輯器將整個程式寫好後再載入UTC400 (有關所有運動程式的指令請詳見運動命令格式). 在NC程式執行之前,首先我們必須定義座標系統.所謂座標系統可以視為某些特定馬達的群集(group),在此座標系統裡的所有馬達可以根據運動程式裡的指令同動或是依序動作.如果馬達之間的動作是完成獨立且沒有時序上的關係,我們就可以將它們定義在不同的座標系統裡.UTC400最多可以定義四個不同的座標系統,四軸馬達可以任意地分配到任一
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
21
座標系統(但是不能重複分配),我們可以隨時用&n指令定址到第n個座標系統,然後執行任何一個程式,就算別的座標系統正在執行相同或是不同的程式中也無所謂.
以上面第1號程式為例,因為使用到X,Y座標軸,所以在此我們將此兩座標軸指定給第一跟第二個馬達 ,並且比例要符合使用者單位 (在此為mm).假設 Encoder為4000(count/rev),螺桿間距為5(mm/rev),比例等於
4000
5800
countrev
mmrev
countmm
=
假設只有一個座標系統,因此第一座標系統應定義成:
&1 ; 指定第一座標系統 #1->800X ; 比例800, 指定給X #2->800Y ; 比例800, 指定給Y
UTC400座標軸名稱可以為X, Y, Z, U, V, W, A, B, C中任一選擇,而且可以重複使用.比例值則必須為任意正浮點數,而馬達實際正負方向可以由參數Ix09來設定.在程式執行中我們不能用寸動指令去移動任何有定義座標軸的馬達,但是如果我們將沒有用到的馬達座標軸定義取消(例如#4->0)或是定義在別的座標系統裡的話,在程式執行中我們還能任意寸動它.
座標系統定義完成後,以下是幾個跟自動執行有關的指令:
&1 ;選擇第1座標系統 B1 ;選擇第1號程式 R ;連續執行 S ;單步執行 H ;暫停執行 A ;中止執行 ; 所有座標系統連續執行 ; 所有座標系統單步執行 ; 所有座標系統暫停執行 ; 所有座標系統中止執行
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
22
PLC程式
書寫及執行 PLC程式 PLC程式並不同步於運動程式,可於背景程式中監看,計算,用處很大,PLC共有 16個程式,可以分別致能,它的寫法與運動程式相似,並有很多相同指令,但 PLC程式中不能有運動指示。 例: OPEN PLC 1 CLEAR P1=P1+1 CLOSE 您可以用 UTC400軟體程式來書寫下載,現在您可看看程式是否在控制內,LIST PLC 1 .您可看到 P1=P1+1 OPEN CLOSE和 CLEAR指令並非程式的一部份,它們是用來定義程式的緩衝器。 當 I6=2,PLC 1到 16可以致能.當ENA PLC1啟動PLC1程式.此時可重覆P1看看 P1值是否增加,您可同時執行運動程式並看 P1是否繼續增加。 當 DIS PLC1時,P1值即不再增加(維持同值) 。
載入/執行儲存/備分程式 PLC: 至此已確認系統正常,然後可依應用需求撰寫 PLC/運動程式,然後可依下程序載入/執行程式 系統操作程序: 載入/執行程式程序: Step1: ^D ;禁能全部 PLCs Step2: ^A ;禁能全部 運動程式 Step3: ^k ;Kill all motors Step4: UTCPANEL >檔案(F) >>載入控制器 >>xxxx.UTC ;載入檔案 Step5: I6=2 ;啟動 PLC Step6: 重開機
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
23
儲存/備分程式: Step1: ^D ;禁能全部 PLCs Step2: ^A ;禁能全部 運動程式 Step3: ^k ;Kill #1 #2 Step4: I6=0 I9=4 Step5: UTCPANEL >工具(T) >>儲存備份檔案(B) >>xxxx.UTC ;儲存備份檔案至 PC Step6: SAVE ;儲存備份資料至 FLASH,待WD燈熄滅則完成 Step7: I6=2
Step8: 重開機 ;確認系統正確 所有運動程式皆以循序而且同步的方式在前景部份被執行,背景部份我們則可以用非同步的方式去掃瞄到最多 16個 PLC程式,這些程式可以完成大部份可程式控制器所擁有的功能.PLC產生方式及邏輯語法和運動程式完全一樣,只要將 OPEN PROG# 改成 OPEN PLC# 即可,但是它不可以直接下座標軸的運動命令,僅能以寸動的方式去移動馬達. 因為 PLC掃瞄的頻率非常快,所以我們可以用它來監視外部輸入的狀態,設定輸出的值,送出一個訊息,監測運動狀態,改變馬達參數,或是讓程式開始執行等動作. PLC也可以送出命令就如同我們從 PC下命令給 UTC400一樣.一般 PLC的掃瞄時間大約為 5∼10個毫秒(視PLC的長短而定), UTC400最多可允許16個PLC同時存在本身的記憶體裏, PLC間以不同的號碼(0..15)來區分. PLC載入 UTC400的緩衝區後,可以隨時用 ENAPLC# (#為 PLC號碼)來啟動它,或是用DISPLC#來關閉,那些 PLC可以被啟動則取決於 I6之設定. PLC功能可區分如下:
數值計算: (calculation statements) 一旦 PLC 被致能,我們可以用來一直重複某個數學運算,用以即時偵測或是等待我們要的結果出現為止.例如:
P1 = P1+1 P161 = (M161+M164)/M191
邏輯判斷: (conditional statements) PLC的邏輯語法和運動程式完全一樣,常用的邏輯判斷方式有以下幾種:
IF準位觸發判斷 (level-triggered conditions) 當某個條件成立時就執行此區塊的內容,PLC被掃瞄幾次就執行幾次,如:
IF (M11 = 0) ; 急停開關 CMD”A” ENDIF IF (M12 = 0) ; 只要壓下按鍵,P1一直往上計數 P1 = P1+1 ; 計數速度視 PLC掃瞄頻率而定 ENDIF
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
24
IF邊緣觸發判斷 (edge-triggered conditions) 當某個條件成立時就執行此區塊的內容一次,不管 PLC被掃瞄到幾次,如:
IF (M11 = 0 AND P11 != 0) ; 壓下寸動按鍵 P11 = 0
CMD”#1J+” ENDIF IF (M11 = 1 AND P11 != 1) ; 放開寸動按鍵 P11 = 1
CMD”#1J/” ENDIF IF (M12 = 0) ; 每壓下按鍵一次,P1往上計數一次 IF (P12 = 1)
P1 = P1+1 P12 = 0 ENDIF ELSE P12 = 1
ENDIF
WHILE迴圈 當某個條件成立時就重複執行此區塊的內容 ,直到條件不成立時為止 .一旦某個
WHILE條件成立,PLC掃瞄到相對應的 ENDWHILE時會跳出此一 PLC以便繼續掃瞄其它的 PLC,下一次重新掃瞄到此 PLC時再接著從原WHILE的地方開始執行.
注意: 假設PLC裡有WHILE迴圈且其條件成立的話,同一PLC接在此一WHILE迴圈後的內容會暫時掃瞄不到,但是不會影響到其它 PLC的掃瞄.
IF (M11 = 0 AND P11 != 0) ; 壓下急停開關 P11 = 0 CMD”A” WHILE(M60 != 0) ; 等待 IN POSITION信號 ENDWHILE M1 = 0 ; 馬達煞車輸出 ON ENDIF IF (M11 = 1 AND P11 != 1) P11 = 1 ENDIF
計時 (precise timing) 利用控制器提供的時計配合WHILE迴圈,我們就可以做到非常準確的計時,例如:
M71 = 1000 ; 設定時計時間 1000 msec WHILE(M71 > 0) ; 等待時計時間下數到 0 ENDWHILE 其中 M71為建議使用變數中的時計 1 M81 = M0 ; 記錄目前中斷計數器的值
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
25
M82 = M0-M81 ; 計算中斷計數器的差值 WHILE(M82 < 1000) ; 差值小於指定時間? (單位 msec) M82 = M0-M81 ; 是的話繼續計算中斷計數器的差值 ENDWHILE 其中 M0為建議使用變數中的中斷計數器 M81->C6C0,0,24,S ; 指向任一使用者緩衝區,有號整數格式 M82->C6C1,0,24,S ; 指向任一使用者緩衝區,有號整數格式
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
26
路徑規畫
UTC400 有一套獨特的路徑產生法則,在這個法則之下,使用者可以一直去嘗試非常高難度的路徑規畫,但不會使你的程式看起來非常複雜。
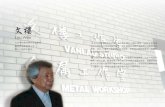
最簡單的路徑就是融合式的直線運動(Blended Linear Move,兩段直線運動間不停止),我們只要設定運動速度(F)或是運動時間(TM)[注意:兩者互為倒數關係],加速時間(TA),“S曲線”時間(TS),剩下直線加速的時間(TL)就等於TA-TS, 實際整段加速時間(Tacc)則等於TS+TA 。 假設 S曲線時間等於零(TS=0),加速度就是一固定的常數,結果我們會得到如下頁圖 1的運動軌跡,如果 TA=TS, 我們會得到一純 S 曲線時間的運動軌跡,如圖 2,若是兩者皆有(TA>TS),路徑軌跡則如圖 3。
因為UTC400允許非常有彈性地調整加速時間或是S曲線時間,所以使用者可以得到最快的加速度運動,但仍保有極小的“jerk”(加速度對時間的微分)。在多軸運動中,每一軸的速度會根據我們的要求而相互調整, 如此的話,我們指定的最快運動速度就自動會是所有這些 Feedrate Axes的向量速度總和,使用者不用去操心每一軸之間複雜的速度變化,所有計算都由 UTC400幫你處理好。
如果連續很多運動步序而中間沒有任何暫停,UTC400 可以將每一步從原來的速度直接加(減)速至下一步的速度(如果有任何速度變化的話),此種運動我們稱為 Blended
TM or ∆P/F
Tacc TM or ∆P/F
Tacc
V
T
Tacc Tacc
V
T
Tacc TM or ∆P/F
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
27
Move。速度變化的計算是在每一步開始減速的時候開始,所以在兩段之間我們會得到一圓滑的曲線。 圖 1 圖 2 圖 3 在圓弧的模式下,UTC400可自動產生平面或是三度空間的圓弧,加速度和運動速度的設定跟直線的設定方式完全一樣。除了指定終點座標外, 圓弧運動我們還必須給定圓心向量的座標或是半徑值。任一圓弧皆可跟其它圓弧或是直線 Blended在一起。
V
A
T
T
V
A
T
T
V
A
T
T
TS=0 Tacc=TA
TA=TS Tacc=2*TS
TA>TS Tacc=TA+TS
TL TS TS TS TS TL
Y
XI
(10,10)
(25,25)
(30,45)
J
NORMAL K-1 CIR1 F10 X30Y45I15J15
Y
X
I
(25,5)
(25,25) (45,25)
CIR2 TM1000 X25Y5I-20
Y
X
I (25,25) (45,25)
CIR2 TM1000 X45Y25I-20 or I-20
Y
X
(0,20)
(20,0)
CIR2 F20 X0Y20R20 CIR2 F20 X0Y20R-20
1
2
1
2
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
28
有些使用者可能需要非常複雜的軌跡路徑去搭配各種奇形怪狀的工件, UTC400另提供一種額外的運動模式以產生更平滑,更準確的路徑, 這種模式稱為 Spline Move。使用者只要設定運動中每一線段的運動時間(TM)或速度(F),然後依序輸入每一線段的座標值或位移量,三次元的圓滑運動軌跡就自動會被計算出來,每一線段之間都不會有速度跟加速度的不連續現象發生。
當控制器須要跟隨外部的信號同動時(通常為 Encoder信號), UTC400有兩種方法可供選擇:
+X
+Z
+Y +X
+Z
+Y +X
+Z
+Y
NORMAL K-1 NORMAL J-1 NORMAL I-1
旋轉平面指定方式
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
29
位置跟隨 (position following – electrical gearing)
Master信號由 Ix85指定的來源進來後,首先經由一 Ix86設定大小的緩衝區作加減速處理(Ix86愈大,信號變化速率就愈慢),如果 Ix05等於1表示第 x軸馬達要隨第一組Master同動, 如果 Ix05等於 2表示第 x軸馬達要隨第二組Master同動,以此類推. 而跟隨比例則由 Ix06設定
Memory
HW
Encoder
I185
I285
I385
I485
Ix050
Ix06
Command position Trajectory position
I105
I205
I305
I405
No
Yes
Scale factor
Master source
Source selector
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
30
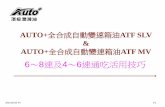
時間跟隨 (time base following – electrical cams)
除了改變馬達的命令位置達到跟隨的功能外,另外一種比較特殊的跟隨方式是去控制時間單位的快慢達到相同的作用.在這種模式下(Ix61 不等於 0),使用者只要定義好運動軌跡(Motion Profile),運動時間(TM)及加減速時間(TA, TS),在程式執行的過程中,進來的 Master信號就表示時間的快慢,當 Ix60等於 1時,進來 1個 count代表時間過了 1 msec,如此整個程式就會隨著 Master的快慢而同動. 如果 Ix61的 bit-4為 1時表示目前 Master作用為觸發式時間跟隨,控制器會固定以第四軸的觸發信號(由 I481設定)當觸發源,在觸發信號來之前時間會保持凍結直到觸發信號來之後才開始時間跟隨.
Memory
HW
Encoder
I185
I285
I385
I485
Ix61 bit4=1
Time base
Ix60
I161
I261
I361
I461
No
Yes
Triggered? No
Yes
Scale factor
Master source
Source selector
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
31
範例:
假設一 Master encoder每轉有 400 counts, encoder每轉一圈 X軸要跑 100 mm,程式寫法如下:
INC ; 相對座標模式 I150=1 ; 設定成 Blended Move 模式 I185=$848 ; Master從 HW Port進來 I161=1 ; 開始 Time Base跟隨 TM(400-I152/2) ; 第一段運動時間必須扣掉加速時間 X100 ; 第一段 X軸跑 100 mm TM400 ; 以後每段 TM為 400 ms (encoder轉一圈) P0 = 0 WHILE(P0 = 0)
X100 ; X軸每次跑 100 mm ENDW
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
32
參數及變數 一. I 參數摘要
號碼 定義 I0 卡號設定
I1 作用中之座標系統個數
I2 COM2 Baud Rate設定
I3 COM2 Handshake I4 Wait State設定
I5 所有馬達位置/速度傳回值設定
I6 PLC致能控制
I7 Ctrl Type指令禁能設定
I8 背隙遲滯(Backlash Hysteresis)值
I9 浮點數最大傳回小數點位數
I10 Real Time Interrupt週期
I11 P,Q變數複製至 nvRAM設定
I12
I13 CAM Table信號來源/控制
I14 CAM Table Rollover值
I15 Cam Table Master比例值
I16 Cam Table 數位輸出遮罩值
I17
I18 擴充 I/O板致能控制
I19 內建數位輸入點去彈跳週期
I20 資料搜集來源遮罩及資料型態
I21 資料搜集來源位址 1
I22 資料搜集來源位址 2
I23 資料搜集來源位址 3
I24 資料搜集來源位址 4
I25 資料搜集間隔
I26 資料搜集緩衝區長度
I27 循環式資料搜集致能
I28 循環式資料搜集於觸發停止後,繼續蒐集之筆數
Ix01 馬達寸動和原點復歸加速時間
Ix02 馬達寸動和原點復歸 S曲線加速時間
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
33
Ix03 馬達寸動速度
Ix04 馬達急停減速變化率
Ix05 馬達跟隨致能
Ix06 馬達跟隨比例
Ix07 馬達原點復歸速度/方向
Ix08 馬達原點位置偏移量
Ix09 馬達旗標控制
Ix10 軟體正極限
Ix11 軟體負極限
Ix12 座標系統座標軸平移量
Ix13 座標系統座標軸縮放比例
Ix14 座標系統座標軸單位縮放比例
Ix15 背隙(Backlash)補正值
Ix16 背隙補正速率
Ix17 馬達位置循環(Rollover)值
Ix18 慢速找機械原點速度
Ix19 馬達速度權值比例
Ix20 比例增益值(Kp)
Ix21 微分增益值(Kd)
Ix22 速度前饋增益值(Kvff)
Ix23 積分增益值(Ki)
Ix24 積分模式
Ix25 加速度前饋增益值(Kaff)
Ix26 馬達 x位置回授位址
Ix27 馬達 x速度回授位址
Ix28 馬達 x速度回授比例
Ix29 命令電壓輸出偏移量
Ix30 最大命令電壓輸出
Ix31 跟隨誤差跳脫準位
Ix32 Dead Band範圍
Ix33 In Position範圍
Ix34 Big Step範圍
Ix35 積分限制
Ix36~Ix49
Ix50 座標系統融合式運動致能
Ix51 座標系統程式允許最大加速度
Ix52 座標系統程式預設加速時間
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
34
Ix53 座標系統程式預設 S曲線加速時間
Ix54 座標系統程式預設進給速率
Ix55 座標系統 Time Base(%)變化率
Ix56 座標系統程式快速位移進給速率
Ix57 座標系統程式快速位移進給加速時間
Ix58 座標系統運動程式加速模式
Ix59 座標系統旋轉角度
Ix60 座標系統外部 Time Base比例
Ix61 座標系統 Time Base 來源
Ix62~Ix79
Ix80 編碼器解碼控制
Ix81 編碼器抓取控制
Ix82 編碼器抓取旗標選擇
Ix83
Ix84
Ix85 Master信號來源
Ix86 Master信號緩衝時間 二. 參數設定
1. 系統 I-參數
I0 卡號設定
範圍 任意非負整數 預設值 0 單位 無 說明 此參數決定目前控制器的卡號.當同時有好幾個控制器連接到同一台 PC時,我們
可以用此參數來區分每一個控制器, PC送出的命令每個控制器都會收到,但是只有被定址的卡片可以可以回應(請參考”!”指令).
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
35
I1 作用中之座標系統個數
範圍 1 .. 4 預設值 1 單位 無 說明 此參數決定那些座標系統有作用(可以執行運動程式),通常 I1會設成所有使用到
的座標系統中號碼最大的值,所以在多座標系統的應用中如果是照順序從座標系統 1開始使用的話會最有效率.如果是單座標系統的應用,將此參數保留成預設值即可.
I2 COM2 Baudrate設定
範圍 0000h .. 00FFh 預設值 2 單位 無 說明 此參數用來設定 COM2的傳輸速率及資料格式, 如果 I2設成 0時 COM2會沒有
作用. 預設傳輸速率為 19200,資料格式為 N-8-1 (8個 data bit, 1個 stop bit, No parity check). 改變此參數後必須重新開機才會使用新的設定.
Bit 0 .. 3 Baudrate Setting
Value Baudrate 0 Not Active 1 9600 2 19200 3 38400 4 115200
Bit 4 .. 7 Data Format Setting
Value Format 0 N-8-1 1 O-8-1 2 E-8-1 3 N-7-1 4 O-7-1 5 E-7-1
※ O: Odd parity check, E: Even parity check, N: No parity check
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
36
I3 COM2 Handshake設定
範圍 0 .. 1 預設值 0 單位 無 說明 此參數用來設定 COM2傳輸時是否要檢查硬體 Handshake信號(RTS / CTS), I3
設成 1時表示要檢查,設成 0時表示不要檢查. 改變此參數後不須重新開機立即有作用.
I4 Wait State設定
範圍 0 .. 7 預設值 1 單位 無 說明 此參數用來設定控制器 DSP wait state 狀態, 設成 0時表示 zero wait state,此時
PLC的掃瞄速度會變快,但是系統的穩定度可能會降低.如果因此而造成控制器時常當機,就必須考慮將此參數改回 1.
此參數僅在開機時檢查一次,所以改變此參數後必須重新開機才會使用新的設定.
I5 所有馬達位置/速度傳回值設定
範圍 0 .. 1 預設值 0 單位 無 說明 此參數用來設定, , 指令的傳回內容.當 I5=0時,所有指
令傳回馬達的實際位置和速度,當 I5=1時,所有指令傳回馬達的命令位置和速度.
I6 PLC致能控制
範圍 0 .. 3 預設值 0 單位 無
說明 此參數用來控制那些PLC可以被致能. PLC有兩種:第一種稱為前景PLC (PLC0),
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
37
掃瞄頻率由 I10決定; 另一種稱為背景 PLC (PLC1..PLC15),每一個 PLC會循序在背景執行時間被掃瞄. I6設定值如下:
0 前景 PLC 不能被致能(off), 背景 PLC 不能被致能(off) 1 前景 PLC可被致能(on), 背景 PLC 不能被致能(off) 2 前景 PLC 不能被致能(off), 背景 PLC可被致能(on) 3 前景 PLC可被致能(on), 背景 PLC可被致能(on)
I7 Ctrl Type指令禁能設定
範圍 0 .. 1 預設值 0 單位 無 說明 此參數用來設定控制器是否接受, , , ,
, 等指令.如果環境很差且 RS232傳輸很容易受干擾的話,控制器就很容易誤收以上幾種 Ctrl Type的指令,所以此時我們就可以將此參數設為 1讓這些指令無作用
I8 背隙遲滯(Backlash Hysteresis)值
範圍 任意非負整數 預設值 2 單位 counts
說明 此參數設定馬達是否要作背隙補正的遲滯量.如果此設定值大於 0 時,每次馬達作
反向運動時,累計位移量必須大於此設定值背隙補正才會啟動.
I9 浮點數最大傳回小數點位數
範圍 0 .. 16 預設值 3 單位 無
說明 當我們下命令要控制器傳回一變數值時,假設其值是浮點數格式, I9可以讓我們設
定最多只傳回幾位小數,如果超過位數的話,自動以四捨五入進位.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
38
I10 Real Time Interrupt週期
範圍 任意正整數 預設值 3 單位 msec
說明 Real Time Interrupt (RTI)週期表示多久時間必須掃瞄 PLC0一次(如果 PLC0有
致能的話), 所以比較重要的 I/O偵測,或是需要比較快偵測時間的動作,都可以放在 PLC0 裡執行. 但是假設 PLC0很長而 I10設很小的話,所有背景時間都會用在執行 PLC0,其他背景 PLC可能就分配不到執行時間,所以這點須特別注意.
I11 P,Q變數複製至 nvRAM設定
範圍 0 .. 1 預設值 0 單位 無 說明 此參數用來設定是否將所有P,Q變數值複製至nvRAM (非揮發性記憶體, UTC選
配). 如果此參數設為 1時,所有 P,Q變數的內容會一直重複的更新到 nvRAM記憶體裡,當開機如果須從 Flash叫回資料時, P,Q變數的值也會一併從 nvRAM叫回. 當此參數設為 0時, nvRAM可當ㄧ般 R變數使用(R0..8192).
I13 CAM Master信號來源
範圍 0000h~FFFFh 預設值 $0850 單位 無
說明 UTC400P控制卡提供五組 on-board 的 encoder信號輸入裝置, 此參數的 bit-0
至 bit-15決定那一組 encoder信號當成目前控制器的 CAM Table信號來源: $084C: On Board CH1 $084D: On Board CH2 $084E: On Board CH3 $084F: On Board CH4 $0850: On Board CH5
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
39
I14 CAM Table Rollover值
範圍 任意非負整數 預設值 0 單位 count
說明 當使用者致能 Cam Table功能時(參考 OPEN CAM指令),我們必須設定一
Master的循環值,當 Master的值超過此一設定值時會從 0重新算起. I14的值不一定要比Cam Table的最後一筆Master值還大,它可以是界於Table中的任何值.
注意: 當改變 I14的值時,如果Cam Table正處於致能狀態中的話, Cam Table掃瞄會自
動被取消,使用者必須重新下 ENA CAM指令才能恢復 Cam Table的功能.
I15 CAM Table Master比例值
範圍 任意浮點數 預設值 1 單位 無
說明 當使用者致能 Cam Table功能時,我們可以設定目前 Master的比例值,實際輸入
的Master值會先乘上此一比例再和 Table中的值作比較,如此讓使用者可以在不用變更 Cam Table的情況下很容易設定 Master的縮放比例.
注意: 當改變 I15的值時,如果Cam Table正處於致能狀態中的話, Cam Table掃瞄會自
動被取消,使用者必須重新下 ENA CAM指令才能恢復 Cam Table的功能.
I16 Cam Table 數位輸出遮罩值
範圍 0000h .. FFFFh 預設值 0 單位 無
說明 在Cam Table中我們可以設定在任何範圍中的輸出狀態(每一 bit代表一點輸出,1
為 ON, 0為 OFF),但實際上可以受 Cam Table作用的輸出點則由此參數決定. Bit0到 bit7代表M1到M8, bit8到 bit15代表M40到M47.只有對應到的 bit設為1時該輸出才會受 Cam Table所控制.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
40
I17
I18 擴充 I/O板致能控制
範圍 0 .. 3 預設值 0 單位 msec
說明 UTC400P最多可外接兩片MT0170擴充 I/O板,每片 I/O板有 16點輸出,32點輸
入. 此參數用來控制那些 I/O板被致能. 0 沒有 I/O板被致能 (可節省背景掃瞄時間) 1 只有第一片 I/O板被致能 2 只有第二片 I/O板被致能 3 兩片 I/O板都被致能
I19 內建數位輸入點去彈跳(Debounce)週期
範圍 任意非負整數 預設值 0 單位 (I19+1) msec
說明 要知道目前數位輸入的狀態(M11..18, M21..28, M50..57, M60..67), 除了直接讀
取 PGA的位址外, UTC400P還提供另外一緩衝區存放所有經過去彈跳處理的輸入點狀態(位址:$0B79). 經過去彈跳處理的輸入點可以有效降低雜訊的干擾,而去彈跳的週期則由此參數設定,預設值 0表示去彈跳週期為 1 millisecond.
I20 資料搜集來源遮罩及資料型態
範圍 $00 - $FF 預設值 0 單位 無
說明 此參數決定那些位址來源(由 I21..I24決定)於資料搜集(GAT)時,將被紀錄於
GAT_BUF內。 Bit 0 – I21指向的位址來源,資料搜集致能(1)/禁能(0) Bit 1 – I22指向的位址來源,資料搜集致能(1)/禁能(0) Bit 2 – I23指向的位址來源,資料搜集致能(1)/禁能(0)
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
41
Bit 3 – I24指向的位址來源,資料搜集致能(1)/禁能(0) Bit 4 – I21指向的位址來源,其資料型態是浮點數(1)或整數(0) Bit 5 – I22指向的位址來源,其資料型態是浮點數(1)或整數(0) Bit 6 – I23指向的位址來源,其資料型態是浮點數(1)或整數(0) Bit 7 – I24指向的位址來源,其資料型態是浮點數(1)或整數(0)
I21 資料搜集來源位址 1
範圍 $0000 - $FFFF 預設值 0 單位 無
說明 此參數指向第一組所欲搜集的資料項的位址。 常用的資料位址表列如下:
定義 第一軸 第二軸 第三軸 第四軸 馬達命令位置(整數) $01CD $01CE $01CF $01D0 馬達命令速度(浮點數) $01D5 $01D6 $01D7 $01D8 馬達命令加速度(浮點數) $01DD $01DE $01DF $01E0 馬達實際位置(整數) $082C $082D $082E $082F 馬達實際速度(整數) $0824 $0825 $0826 $0827 跟隨誤差(整數) $096D $096E $096F $0970 DAC輸出(整數) $0985 $0986 $0987 $0988
I22 資料搜集來源位址 2
範圍 $0000 - $FFFF 預設值 0 單位 無
說明 此參數指向第二組所欲搜集的資料項的位址。
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
42
I23 資料搜集來源位址 3
範圍 $0000 - $FFFF 預設值 0 單位 無
說明 此參數指向第三組所欲搜集的資料項的位址。
I24 資料搜集來源位址 4
範圍 $0000 - $FFFF 預設值 0 單位 無
說明 此參數指向第四組所欲搜集的資料項的位址。
I25 資料搜集間隔
範圍 正整數 預設值 1 單位 1.024ms
說明 當下”GAT”指令後,依 I25設定週期,記錄所選定搜集變數數值。
I26 資料搜集緩衝區長度
範圍 1 .. 程式緩衝區剩餘空間 預設值 0 單位 word
說明 此參數設定所欲蒐集資料項之總和筆數,例如 I26=1000, I20=3僅致能兩位址
的資料蒐集,則每一位址資料僅 500筆,此參數值的上限是 Program Buffer扣除 Motion及 PLC program使用的空間,即當時以 SIZE指令所問回的空間。
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
43
I27 循環式資料搜集致能
範圍 0 / 1 預設值 0 單位 無
說明 此參數致能(1)或禁能(0)資料搜集循環功能,當下”GAT”指令,則開使執行資料蒐
集功能,若 I27=0,則當總蒐集資料長度到達 I26 資料搜集緩衝區長度(GatherSize)時,則停止資料搜集功能; 若 I27=1,則當總蒐集資料長度到達 I26 資料搜集緩衝區長度(GatherSize)後,則會將新資料從資料搜集緩衝區起始位置開始起,蓋過舊資料,如此一直循環,一直到: (1)下”ENDG”指令停止資料搜集, (2)當設定外在條件成立時,觸發設定 Mxxx (GatherStopTriggered位址$9CB)=1,則繼續循環搜集各個被致能的遮罩來源資料各 I28筆後,停止資料搜集。
I28 循環式資料搜集於觸發停止後,繼續蒐集之筆數
範圍 0 - (資料蒐集緩衝區長度/ 被致能的遮罩來源數) 預設值 0 單位 無
說明 此參數用於設定於循環式資料蒐集功能致能(I27=1)時,當設定外在條件成立時,
觸發設定 Mxxx (GatherStopTriggered位址$D20C)=1,各個被致能的遮罩來源繼續循環搜集資料的筆數。
2. 馬達 I-參數(x表示馬達號碼,範圍 1∼4)
Ix01 馬達寸動加速時間
範圍 任意正浮點數 預設值 40 單位 msec
說明 此參數設定馬達寸動和機械原點復歸的加速時間(TA), 此加速時間已包含 S曲線
加速時間.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
44
Ix02 馬達寸動 S曲線加速時間
範圍 0~100浮點數 預設值 100 單位 %
說明 此參數設定馬達寸動和機械原點復歸的加速 S曲線時間(TS)佔所有加速時間的
比例.當此參數設成 0時表示沒有任何 S曲線加速的成份,當此參數設成 100時表示此加速為一純 S加速的曲線(TS=TA/2). 因為加速時間都是以整數表示,所以設定此參數時會被自動調整成最接近的百分比.
Ix03 馬達寸動速度
範圍 任意浮點數 預設值 1000 單位 counts / sec (pps)
說明 此參數設定馬達寸動的速度,改變此參數並不會立即改變正在寸動馬達的速度,必
須在下一次寸動指令(J+, J-, J=,…)後才有作用.假如此參數為負值的話,正寸動及負寸動的方向會相反.
Ix04 馬達急停減速變化率
範圍 任意正符點數 預設值 0.5 單位 count / msec2
說明 當使用者下了放棄指令 A,或控制器偵測到馬達過極限或是驅動器產生錯誤訊息,
馬達必須立即減速停止,停止的速率即是將目前的馬達命令速度,以每millisecond加減上 Ix04的變化率,直到馬達停止為止.所以 Ix04的值愈大,馬達急停的速度就愈快,反之則愈慢.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
45
Ix05 馬達跟隨致能
範圍 0 .. 3 預設值 0 單位 無
1. 說明 當 Bit4, Bit5 都等於 0時,馬達可以作位置跟隨:
Setting (Bit 3,2,1,0) Function
0 馬達不跟隨 1 馬達跟隨 Master 來源 1 (由 I185指定) 2 馬達跟隨 Master 來源 2 (由 I285指定) 3 馬達跟隨 Master 來源 3 (由 I385指定) 4 馬達跟隨 Master 來源 4 (由 I485指定)
2. 當 Bit4等於 1, Bit5等於 0時, 馬達可以作 Cam Table的絕對位置跟隨,其
Master的來源由 I13指定. 3. 當 Bit4等於 0, Bit5等於 1時, 馬達可以作 Cam Table的相對位置跟隨,其
Master的來源由 I13指定.
Ix06 馬達跟隨比例
範圍 任意浮點數 預設值 1 單位 無
說明 此參數設定馬達跟隨外部 Master信號同動的比例, Master信號進來的脈衝數會
先乘上此倍數,再變成馬達實際要走的脈衝數.
Ix07 馬達原點復歸速度/方向
範圍 任意整數 預設值 1000 單位 counts / sec (pps)
說明 此參數設定馬達機械原點復歸的速度和方向,如果是正值則往正方向找原點,如果
是負值則往負方向找原點. (找原點的步驟請參照使用手冊馬達寸動部份)
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
46
Ix08 馬達原點位置偏移量
範圍 任意浮點數 預設值 0 單位 counts
說明 此參數設定馬達機械原點復歸完成後,還要再加上指定的偏移量才當成真正的機
械原點.
Ix09 馬達旗標控制
範圍 任意整數 預設值 1344 (540H) 單位 無
說明 此參數設定馬達控制旗標的功能,在此旗標包含極限開關,原點開關及驅動器錯誤
信號等.
0 1 0 1 0 1 0 0 0 0 0 0
Home Search Disable = 0 原點復歸有作用 = 1 原點復歸無作用 Servo Enable Function ON = 0 驅動器致能信號無作用(可當一般輸出)
= 1 驅動器致能信號有作用 Power on Servo State = 0 開機驅動器禁能( Servo off ) = 1 開機驅動器致能( Servo on ) Limit Disable = 0 硬體極限有作用 = 1 硬體極限無作用 Limit Polarity = 0 極限開關開路為真(使用 B接點開關)
Limit Polarity
Driver Fault Polarity Driver Enable Polarity
Driver Fault Disable
Limit Disable Power on Servo State Servo Enable Function On
Bit0Bit1 Bit2 Bit3
Home Search Disable
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
47
= 1 極限開關閉路為真(使用 A接點開關) Driver Fault Disable = 0 驅動器錯誤信號有作用 = 1 取消驅動器錯誤信號功能 Driver Fault Polarity = 0 驅動器錯誤開路為真(使用 B接點開關) = 1 驅動器錯誤閉路為真(使用 A接點開關) Driver Enable Polarity = 0 驅動器致能信號為低準位( Low True) = 1 驅動器致能信號為高準位( High True) Bit3 = 0 原點復歸後機械原點設為工作原點 = 1 原點復歸後工作原點位置不變 Bit2 = 0 寸動受 Feedrate Override(%) 影響 = 1 寸動不受 Feedrate Override(%) 影響 Bit1 = 0 開機時馬達位置不清為 0 = 1 開機時馬達位置清為 0 Bit0 = 0 馬達 DAC命令不反向 = 1 馬達 DAC命令反向 (正負方向顛倒)
0 1 0 1 0 1 0 0 0 0 0 0
Bit12 = 0 以兩段式速度找機械原點 = 1 以硬體抓取方式找機械原點(需有編碼器回授) Bit13 = 0 編碼器回授值會隨命令位置調變 = 1 編碼器回授值不隨命令位置調變
Bit12Bit13 Bit14 Bit15
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
48
Ix10 軟體正極限
範圍 任意整數 預設值 0 單位 counts
說明 此參數設定馬達軟體正極限的值,當馬達往正方向移動超過此設定值時,馬達就會
以 I15所設定的減速速率停止,此時馬達僅能夠往負方向移動. 軟體正極限大部份情況下要在馬達找過機械原點後才有意義,所以在找原點的過程中軟體極限功能會暫時取消,直到原點復歸完成後才恢復. Ix09之 bit8等於 1時僅取消硬體極限檢查,軟體極限還是有作用,要取消正軟體極限功能只要將 Ix10設成 0即可(如果要以 count 0當成軟體正極限可以將此參數設成 1) .
Ix11 軟體負極限
範圍 任意整數 預設值 0 單位 counts
說明 此參數設定馬達軟體負極限的值,當馬達往負方向移動超過此設定值時,馬達就會
以 I15所設定的減速速率停止,此時馬達僅能夠往正方向移動. 軟體負極限大部份情況下要在馬達找過機械原點後才有意義,所以在找原點的過程中軟體極限功能會暫時取消,直到原點復歸完成後才恢復. Ix09之 bit8等於 1時僅取消硬體極限檢查,軟體極限還是有作用,要取消負軟體極限功能只要將 Ix11設成 0即可(如果要以 count 0當成軟體負極限可以將此參數設成-1) .
Ix12 座標系統座標軸平移量
範圍 任意浮點數 預設值 0 單位 user unit
說明 UTC400P提供一標準正交軸座標系統轉換的功能,讓使用者可以讓運動程式任意
地旋轉或平移.在運動程式中,使用者可以用 ADIS或 IDIS指令去改變座標系統各軸的座標平移量;在即時命令中則可以改變此參數值達到相同的功能.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
49
Ix13 座標系統座標軸縮放比例
範圍 任意正浮點數 預設值 1 單位 無
說明 除了標準正交軸座標系統轉換的功能外,UTC400P還提供了可以讓運動軌跡任意
放大縮小的功能,在運動程式中,使用者可以用 ASCL或 ISCL指令去改變座標系統各軸的縮放比例;在即時命令中則可以改變此參數值達到相同的功能. (請參閱Ix14)
Ix14 座標系統座標軸單位縮放比例
範圍 任意非零浮點數 預設值 1 單位 無
說明 除了標準正交軸座標系統轉換的功能外,UTC400P還提供了可以讓運動軌跡任意
放大縮小的功能,在運動程式中,使用者可以用 UNIT指令去改變座標系統各軸的單位縮放比例;在即時命令中則可以改變此參數值達到相同的功能. 如果 Ix14為負時會產生一鏡射的路徑.
注意: Ix13, Ix14基本上都是提供了相同放大縮小的功能,不同的是改變各軸的縮放比
例時,運動程式會以原來指定的進給率(F)前進,所以運動時間(TM)會跟各軸的縮放比例成正比;而改變各軸的單位縮放比例時,運動程式會以原來長度計算出來的運動時間(TM)前進,所以進給率(F)會跟各軸的單位縮放比例成正比.
Ix15 背隙(Backlash)補正值
範圍 任意非負整數 預設值 0 單位 counts
說明 此參數設定馬達是否要作背隙的補正.如果此設定值大於 0 時,每次馬達作反向運
動時,雖然座標位置不變,但馬達實際位置會多走此一指定的 count 數以補正齒隙造成的影響,補正速率由 Ix16決定.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
50
Ix16 背隙補正速率
範圍 1 .. 256 預設值 1 單位 counts / msec
說明 此參數設定馬達作背隙補正的速率,如果此值愈大,背隙補正的速率愈快, 補正的
效果也愈好,但是如果加減速過大也有可能會造成機台的振動.
Ix17 馬達位置循環(Rollover)值
範圍 任意整數 預設值 0 單位 counts
說明 如果此參數大於0, 馬達位置會限制在 0至 Ix17-1的範圍之內循環,如果此參數小
於 0, 馬達位置會限制在 Ix17至-Ix17-1的範圍之內循環, 如果此參數等於 0, 馬達位置會限制在-8,388,608至 8,388,607的範圍之內循環.
位置循環的設定通常用於旋轉軸, 或是一直往單方向增量位移的運動(為了避免位置值累加過大造成浮點數運算的誤差), 預設的 Ix17值等於0, 亦即馬達位置會限制在-8,388,608至 8,388,607的範圍之內循環.
Ix18 慢速找機械原點速度
範圍 任意正整數 預設值 1 單位 kpps 說明 此參數設定馬達以慢速回歸找確實的機械原點位置 (通常為馬達C信號) 時的速
度,也就是此值愈小,速度愈慢,相對伺服的跟隨誤差也會愈小,所以可以找到離確實的機械原點愈近的位置.
此參數預設值為 1,也就是慢速回歸找機械原點的速度為 1 kpps.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
51
Ix19 馬達速度權值比例
範圍 任意正浮點數 預設值 1 單位 無
說明 當互為補間的座標軸中有某一軸的單位不一致時(如 mm 和角度),其中可能有一
軸的補間速度會特別慢,我們就可以用此參數來調整其速度權值的比重.當此參數愈大時,此軸馬達的補間速度就愈快.
Ix20 比例增益值(Kp)
範圍 任意非負整數 預設值 0 單位 無
說明 此參數提供一個與位置跟隨誤差成正比的控制反應, 其效用有如電子式彈簧, 主
要是增加系統剛性. 足夠大的 Ix20 可縮小位置跟隨誤差並使馬達有較佳的保持定位能力, 但過大的
Ix20 會引起系統對跟隨誤差的過度反應, 導致劇烈抖動或嗡鳴聲, 甚至震盪而跳脫. 反之, 太小的 Ix20使馬達顯得軟弱無力, 跟隨誤差亦大, 無法克服負載的變化.
Ix20常用值約介於 40000~90000 (以 BALDOR BSM 80, 90系列, 4096 PPR而言), 一般是往上調到馬達定位剛性足夠, 但尚未產生震盪之時即可.
Ix21 微分增益值(Kd)
範圍 任意非負整數 預設值 0 單位 無
說明 此參數提供一個與馬達實際速度(Actual Velocity)成正比的反向控制反應, 其效
用有如電子式阻尼, 主要是增加系統穩定性. Ix21愈大, 阻尼效應愈強. 適當的 Ix21可抑制因 Ix20(Kp)快速反應產生的Overshoot, 使系統能兼顧快速反
應與穩定性. 過大的 Ix21 同樣會引起系統的過度反應, 導致劇烈抖動或嗡鳴聲, 而太小的 Ix21則無法克服 Overshoot現象.
Ix21常用值約介於 300~4000 (以BALDOR BSM 80, 90系列, 4096 PPR而言), 一般是先調好 Ix20(Kp), 再逐步調高 Ix21 ( Ix22亦請同步調整), 使其達到靜止時不振動, 快速定位亦無 Overshoot即可.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
52
Ix22 速度前饋增益值(Kvff)
範圍 任意非負整數 預設值 0 單位 無
說明 此參數提供一個與馬達命令速度(Command Velocity)成正比的控制反應,主要是
降低因 Ix21(Kd)阻尼效應而造成的循跡誤差. Ix22一般都設成比 Ix21(Kd)稍大,然後根據常用的工作速度微調 Ix22, 使馬達在
正轉及反轉時,都能得到盡可能接近零的跟隨誤差. (但此時的 Ix22並不會滿足所有的速度,因此需要取捨,或是加大 Ix20 來進一步降低整體的跟隨誤差).
Ix23 積分增益值(Ki)
範圍 任意非負整數 預設值 0 單位 無
說明 此參數提供一個與位置跟隨誤差累積量(Integral Following Error)成正比的控制
反應,主要是消除系統穩態誤差. Ix23常用值約介於 100~800 (以 BALDOR BSM 80, 90系列, 4096 PPR而言),
過大的 Ix23 會引起系統對系統跟隨誤差累積量的過度反應,導致劇烈抖動或嗡鳴聲. 而太小的 Ix23則於穩態時定位較慢或克服不了摩擦而殘留穩態誤差, 造成定位失準.
Ix24 積分模式
範圍 0 / 1 預設值 1 單位 無
說明 當積分模式 Ix24=1, 跟隨誤差累積的動作只有在命令速度為零時才作. 當積分模式 Ix24=0, 跟隨誤差累積的動作隨時都在作. 雖然後者可以帶來運動中保持較小跟隨誤差的機會,但若使用場合不當,可能反而
造成系統運動中的不穩定.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
53
Ix25 加速度前饋增益值(Kaff)
範圍 任意非負整數 預設值 0 單位 無
說明 此參數提供一個與馬達命令加速度(Command Acceleration)成正比的控制反應,
主要是降低因系統慣量而造成的循跡誤差. Ix25常用值約介於 100~800 (以 BALDOR BSM 80, 90系列, 4096 PPR而言).
Ix26 馬達 x位置回授位址
範圍 $0000~$FFFF 預設值 I126: $084C I226: $084D I326: $084E I426: $084F 單位 無
說明 UTC400P控制卡提供五組 on-board的 encoder信號輸入裝置,此參數的 bit-0至
bit-15決定那一組 encoder信號當成目前馬達 x的位置回授信號: $084C: On Board CH1 $084D: On Board CH2 $084E: On Board CH3 $084F: On Board CH4 $0850: On Board CH5
Ix27 馬達 x速度回授位址
範圍 $0000~$FFFF 預設值 I126: $0844 I226: $0845 I326: $0846 I426: $0847 單位 無
說明 UTC400P控制卡提供五組 on-board的 encoder信號輸入裝置,此參數的 bit-0至
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
54
bit-15決定那一組 encoder信號當成目前馬達 x的速度回授信號: $0844: On Board CH1 $0845: On Board CH2 $0846: On Board CH3 $0847: On Board CH4 $0848: On Board CH5
Ix28 馬達 x速度回授比例
範圍 任意浮點數 預設值 1 單位 無
說明 當位置回授和速度回授解析度不一致時,此參數可用來調整兩者的比例使成一致,
以便於 PID的調整.
Ix29 命令電壓輸出偏移量
範圍 -32767 - 32767 預設值 0 單位 10V / 32767
說明 此參數作用在開回路及閉回路模式下, 在依正常演算法則所得之電壓命令輸出前,
再加上此一電壓命令偏移量.
Ix30 最大命令電壓輸出
範圍 0 - 32767 預設值 20480 (~6.25V) 單位 10V / 32767
說明 此參數限制各軸送給馬達驅動器的最大電壓命令輸出, 32767表示正負10伏特全
額輸出, 預設值 20480表示輸出限制在正負 6.25伏之間. 此參數應考量所搭配馬達所能承受的最大電流或最快轉速, 否則有可能會將馬達
燒毀.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
55
Ix31 跟隨誤差跳脫準位(Fatal FE)
範圍 任意非負整數 預設值 2000 單位 counts
說明 此參數為系統安全重要參數,當馬達實際位置與命令位置差距過大,跟隨誤差超過
Ix31 設定值時,為了安全起見,系統會停掉馬達動作及運動程式執行,禁能(Disable)該座標系統內所有馬達,使之成為放鬆狀態.此時 F.E.的 LED 會亮起,待使用者重新下過”A”或”J/ “等可使馬達再度閉回路的指令後, LED才會清除.
Ix32 Dead Band範圍
範圍 非負整數 預設值 10 單位 counts
說明 此參數設定Dead Band範圍大小,當馬達的跟隨誤差在此範圍內,控制器將不作任
何修正. 當 Ix35=0則 Dead Band無作用.
Ix33 In Position範圍
範圍 非負整數 預設值 10 單位 counts
說明 此參數設定 In Position 範圍大小,當馬達的跟隨誤差在此範圍內時, 馬達定位的
旗標(Mx40)會被設為1, 否則會設成0. 當所有馬達都在定位上時, 控制器 In Pos.的 LED就會亮起.
Ix34 Big Step範圍
範圍 非負整數 預設值 2000 單位 counts
說明 此參數設定允許進入伺服迴路的最大跟隨誤差值,當馬達的跟隨誤差超過此限制
範圍時,會以此參數設定的值作為跟隨誤差下去計算.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
56
Ix35 積分限制
範圍 非負整數 預設值 32767 單位 counts
說明 此參數設定當伺服迴路積分有作用時,允許的最大積分累積值,避免積分值過大造
成系統不穩定.
3. 座標系統 I-參數(x表示座標系統號碼,範圍 1∼4)
Ix50 座標系統融合式運動(Blended Move)致能
範圍 0 / 1 預設值 0 單位 無 說明 當此參數為 1時,所有 LIN, CIR1, CIR2模式下的運動都會融合在一起(兩段運動
間不停止), 路徑運算會往前多看一步. 如果此參數設為 0時,每一步序間都會減速到停止再繼續往下一步走(類似 DWELL 0動作).我們可以隨時在運動程式中改變此參數以改變 Blended Move的狀態,但是如果 Ix50從 1變成 0的話,運動程式必須先碰到能將 Blended Move取消的指令後(如 DWELL, PSET…等)才有作用.
Ix51 座標系統程式允許最大加速度
範圍 任意正浮點數 預設值 500 單位 (user unit) / minute / msec
說明 此參數限制了運動程式中所有加減速的極限,如果使用者設定的加減速時間(TA)
小於 Feedrate / Ix51的話(單位 msec),實際運動的加減速時間會自動調整成Feedrate / Ix51.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
57
Ix52 座標系統程式預設加速時間
範圍 任意正浮點數 預設值 20 單位 msec
說明 馬達移動加速時間由兩部分組成,一是 TS,表示"S-曲線"加速時間; 一是 TL,表示
直線加速時間, TA則等於 TS+TL,實際整段加速時間則等於 TS + TA. 此參數即為整段加速時間值,若運動程式中有更改其值的話, Ix52也會跟著改變,假如TA小於 TS, TA會自動調整為 TS.
Ix53 座標系統程式預設 S曲線加速時間
範圍 任意正浮點數 預設值 100 單位 %
說明 此參數設定運動程式的加速 S曲線時間(TS)佔所有加速時間的比例.當此參數設
成 0時表示沒有任何 S曲線加速的成份,當此參數設成 100時表示此加速為一純S加速的曲線(TS=TA/2). 因為加速時間都是以整數表示,所以設定此參數時會被自動調整成最接近的百分比.
注意: 我們如果將 TA設成 0, TA會根據 Ix51設定的最大加速度來計算.
Ix54 座標系統程式預設進給速率
範圍 任意正浮點數 預設值 2000 單位 (user unit) / minute
說明 運動進給速率可在程式中由 F指令設定,如果一開始沒有指定的話則會使用此參
數值,若運動程式中有更改其值的話, Ix54也會跟著改變.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
58
Ix55 座標系統 Time Base (%)變化率
範圍 0.0 ~ 1.0 預設值 0.01 單位 1 / msec
說明 當控制器記憶體位置$023D+(x-1)裡的值為 1時, Time Base為實際的時間單位
(%100). 兩種方式可以改變 Time Base的值: 一是用%指令直接指定(如%100, %50, %33.333…), 一是改變記憶體位置$024D+(x-1)裡的值(建議 Mx97的值, 如 Mx97=0.5(%50), Mx97=1(%100),…)
當我們改變 Time Base的值時,如果控制器馬上反應的話,運動中的馬達可能會產生一突然(不連續)的速度變化,所以大部份的情況下我們必須設定一變化率讓Time Base 從舊的值慢慢變成新的值, Ix55就是讓我們設定此一變化率,當改變Time Base, Time Base會以每 millisecond加上(或減上) Ix55的值直到 Time Base成為指定的值為止,所以此值愈大, Time Base改變速率愈快,此值愈小, Time Base改變速率就愈慢.
Ix56 座標系統程式快速位移進給速率
範圍 任意正浮點數 預設值 3000 單位 (user unit) / minute
說明 RPD運動模式下,我們可能必須指定較快速的進給速率(不由F指令設定), Ix56可
以讓我們單獨指定此一速率.
Ix57 座標系統程式快速位移進給加速時間
範圍 任意正浮點數 預設值 100 單位 msec
說明 RPD運動模式下,進給速率由 Ix56決定(不由 F指令設定), 此參數則讓我們設定
此快速位移的進給加速時間(TA), S-曲線加速時間(TS)還是由 Ix53設定,所以全部加速時間等於 Ix57 + Ix53.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
59
Ix58 座標系統運動程式加速模式
範圍 任意非負整數 預設值 3 單位 無 說明 Bit0: 當此位元為1時,所有運動步序在沒有Blended的情況下皆會根據目前的進
給速率(F)調整每一步的加速時間(TA)以達到和啟動時一致的加速度(Ix54 / Ix52),也就是速率愈快,加速時間就愈長;反之速率愈慢,加速時間就愈短.
當此位元為 0時,所有步序皆以指定的加速時間運動,速率愈快,加速度就愈大;反之速率愈慢,加速度就愈小.
Bit1: 當此位元為 1時, 快速位移 (RPD) 的運動步序不會受 Feedrate Override (%) 的影響, 當此位元為 0時則會.
Bit2: 當此位元為 1時, 外部 Time Base的信號會取絕對值(不管進來的 encoder為正方向或負方向, %永遠為正值), 當此位元為 0時則不會.
Ix59 座標系統旋轉角度
範圍 任意浮點數 預設值 0 單位 degree
說明 UTC400提供一標準正交軸座標系統轉換的功能,讓使用者可以讓運動程式任意
地旋轉或平移.在運動程式中,使用者可以用 AROT或 IROT指令去改變座標系統旋轉角度;在即時命令中則可以改變此參數值達到相同的功能.
Ix60 座標系統外部 Time Base比例
範圍 任意正整數 預設值 1 單位 counts / msec
說明 當 Ix61的值大於 0時表示目前Master作用為時間跟隨,外部進來的Master信號
會被轉換成內部時間單位,此參數用來設定信號和時間的轉換比例. 當 Ix60等於1時,外部進來 1個 count信號表示內部時間單位 1 msec. 當 Ix60等於 10時,外部進來 10個 count信號表示內部時間單位 1 msec.
-
Micro Trend UTC400 User’s Guide (V2.2) Sep.2004
60
注意: 當外部進來的Master信號頻率為 Ix60 count/msec時 %等於 100,我們必須換算適當的轉換比例以使得最快的信號頻率進來時%值不致於太大(最好不要超過%200)
Ix61 座標系統 Time Base 來源
範圍 $00 - $FF 預設值 0 單位 無
說明 1. 當 Bit0 ~ Bit3 都等於 0時:
內部 Time Base, Feedrate override由%指令或是改變 Mx97的值來改變,其變化速率由 Ix55 來決定.
2. 當 Bit0 ~ Bit3 不等於 0時: 外部 Time Base, Feedrate override由 Bit0..3指定的信號來源快慢改變,其
變化的比例由 Ix60 來決定
Setting (Bit 3,2,1,0) Function 1 Master 來源 1 (由 I185指定) 2 Master 來源 2 (由 I285指定) 3 Master 來源 3 (由 I385指定) 4 Master 來源 4 (由 I485指定)
3. 當 Bit0 ~ Bit3 不等於 0, 且 Bit4等於 1時: 外部 Triggered Time Base, 控制器固定以第四組 encoder的抓取信號當觸發源,
在觸發信號來之前時間會保持凍結直到信號來之後才開始時間跟隨. (此時 Ix61 Bit5會自動被設成 1)