UN ANÁLISIS CINEMÁTICO DEL BRAZO HUMANO PARA …
8
UN ANÁLISIS CINEMÁTICO DEL BRAZO HUMANO PARA BIOMECÁNICA 1 Diaz-Hernandez Octavio, Gonzalez-Villela Víctor J., 1 Martínez-Zamudio Patricio, 1 Peña-Medina Erik, 1 Martinez-Sanchez Noé A., 2 Lopez-Parra Marcelo. 1 Departamento de Mecatrónica, Facultad de Ingeniería, UNAM, Cd. Universitaria, MÉXICO, 04510, D.F. Teléfono: 5519130752, [email protected] 2 Departamento de Diseño, Facultad de Ingeniería, UNAM, Cd. Universitaria, MÉXICO, 04510, D.F. y CAT, Facultad de Ingeniería Campus Juriquilla, UNAM, Querétaro. MEXICO lopezp@ unam.mx [email protected], [email protected], [email protected], [email protected], [email protected], [email protected] RESUMEN. La robótica es la ciencia encargada del estudio cinemático y dinámico de robots, por ejemplo aquellos con eslabones unidos por articulaciones (e.g. rotación, deslizamiento). El análisis cinemático en esta área es la descripción en posición, velocidad y aceleración del constructo mecánico diseñado para algún propósito. En este trabajo se describe cinemáticamente al brazo humano para emplear el modelo obtenido en el área de la biomécanica. Se emplean métodos de matrices homogéneas para cinemática del modelo de siete grados de libertad (GDL) que representa al brazo humano. Se encontraron las ecuaciones de la cinemática directa del brazo humano, así como una simulación del brazo para visualizar los movimientos, se le proporcionan los ángulos de cada articulación para el cálculo de posición cartesiana. Este trabajo plantea los usos del análisis en la biomecánica, ya sea para rehabilitación o estudios anatomo-fisiológicos. ABSTRACT. Robotics is the science responsible for the kinematic and dynamic study of robots, such as those with links connected by joints (e.g. rotation, sliding). The kinematic analysis in this area is the description in position, velocity and acceleration of the mechanical construct designed for some purpose. This paper describes the human arm kinematically to use the model obtained in the area of biomechanics. Homogeneous matrix methods for kinematic model of seven degrees of freedom (DOF) represents the human arm are used. Equations of direct kinematics of the human arm and a virtual simulation to visualize the movements, it receives the angles of each joint to calculate cartesian coordinates. This paper focuses on the use of biomechanical analysis, either for rehabilitation or anatomical and physiological studies. INTRODUCCIÓN La robótica se encarga del diseño, construcción e implementación de robots, pero la ciencia que acompaña a la robótica consta de análisis matemáticos formales como son el álgebra lineal y cálculo vectorial, entre otras [1]. En épocas recientes, la robótica ha cobrado importancia para el análisis de multicuerpos que no son necesariamente artificiales, como es el cuerpo humano. Para la biomecánica usa conceptos de ingeniería para entender y describir algunas propiedades y comportamientos de segmentos corporales, ya sea en movimiento, con efecto de fuerzas o en reposo, en particular aquellas actividades que modifiquen la salud [2]. El sistema musculo esquelético está compuesto por huesos, cartílagos, músculos, tendones, ligamentos, etc., provee de forma, soporte, movimiento, estabilidad al humano (y otros seres vivos). Siendo el resultado de millones de años de evolución, es un mecanismo casi perfecto para soportar y trasportar al cuerpo, es una fuente de inspiración para el ingeniero con el fin de innovar nueva tecnología y metodología para desarrollar robots [3]. En la robótica se han aprovechado para la síntesis de movimientos de máquinas a partir de movimientos humanos [4]. Particularmente son de interés las extremidades inferior (pierna) y superior (brazo) del humano[5]. Trabajos relacionados al estudio del brazo humano para la biomecánica. En 1998, se reportó una descripción cinemática del brazo humano usando 7 GDL y parámetros de DH con el fin de construir un dispositivo maestro para teleoperación, observando que el brazo humano posee la estructura de un mecanismo híbrido paralelo y serial [6]. Página | 1068 Derechos Reservados © 2014, SOMIM TOMO III. Avances de la Ingeniería Mecánica en Mecánica Teórica Sociedad Mexicana de Ingeniería Mecánica A.C. Septiembre 2014 ISBN Volumen: 978-607-96746-3-2
Transcript of UN ANÁLISIS CINEMÁTICO DEL BRAZO HUMANO PARA …

UN ANÁLISIS CINEMÁTICO DEL BRAZO HUMANO PARA BIOMECÁNICA
1Diaz-Hernandez Octavio, Gonzalez-Villela Víctor J., 1Martínez-Zamudio Patricio, 1Peña-Medina Erik, 1Martinez-Sanchez Noé A., 2Lopez-Parra Marcelo.
1Departamento de Mecatrónica, Facultad de Ingeniería, UNAM, Cd. Universitaria, MÉXICO, 04510, D.F.
Teléfono: 5519130752, [email protected] 2Departamento de Diseño, Facultad de Ingeniería, UNAM, Cd. Universitaria, MÉXICO, 04510, D.F.
y CAT, Facultad de Ingeniería Campus Juriquilla, UNAM, Querétaro. MEXICO lopezp@ unam.mx
[email protected], [email protected], [email protected], [email protected], [email protected], [email protected]
RESUMEN. La robótica es la ciencia encargada del estudio cinemático y dinámico de robots, por ejemplo aquellos con eslabones unidos por articulaciones (e.g. rotación, deslizamiento). El análisis cinemático en esta área es la descripción en posición, velocidad y aceleración del constructo mecánico diseñado para algún propósito. En este trabajo se describe cinemáticamente al brazo humano para emplear el modelo obtenido en el área de la biomécanica. Se emplean métodos de matrices homogéneas para cinemática del modelo de siete grados de libertad (GDL) que representa al brazo humano. Se encontraron las ecuaciones de la cinemática directa del brazo humano, así como una simulación del brazo para visualizar los movimientos, se le proporcionan los ángulos de cada articulación para el cálculo de posición cartesiana. Este trabajo plantea los usos del análisis en la biomecánica, ya sea para rehabilitación o estudios anatomo-fisiológicos. ABSTRACT. Robotics is the science responsible for the kinematic and dynamic study of robots, such as those with links connected by joints (e.g. rotation, sliding). The kinematic analysis in this area is the description in position, velocity and acceleration of the mechanical construct designed for some purpose. This paper describes the human arm kinematically to use the model obtained in the area of biomechanics. Homogeneous matrix methods for kinematic model of seven degrees of freedom (DOF) represents the human arm are used. Equations of direct kinematics of the human arm and a virtual simulation to visualize the movements, it receives the angles of each joint to calculate cartesian coordinates. This paper focuses on the use of biomechanical analysis, either for rehabilitation or anatomical and physiological studies.
INTRODUCCIÓN
La robótica se encarga del diseño, construcción e implementación de robots, pero la ciencia que acompaña a la robótica consta de análisis matemáticos formales como son el álgebra lineal y cálculo vectorial, entre otras [1].
En épocas recientes, la robótica ha cobrado importancia para el análisis de multicuerpos que no son necesariamente artificiales, como es el cuerpo humano. Para la biomecánica usa conceptos de ingeniería para entender y describir algunas propiedades y comportamientos de segmentos corporales, ya sea en movimiento, con efecto de fuerzas o en reposo, en particular aquellas actividades que modifiquen la salud [2]. El sistema musculo esquelético está compuesto por huesos, cartílagos, músculos, tendones, ligamentos, etc., provee de forma, soporte, movimiento, estabilidad al humano (y otros seres vivos). Siendo el resultado de millones de años de evolución, es un mecanismo casi perfecto para soportar y trasportar al cuerpo, es una fuente de inspiración para el ingeniero con el fin de innovar nueva tecnología y metodología para desarrollar robots [3]. En la robótica se han aprovechado para la síntesis de movimientos de máquinas a partir de movimientos humanos [4]. Particularmente son de interés las extremidades inferior (pierna) y superior (brazo) del humano[5].
Trabajos relacionados al estudio del brazo humano para la biomecánica.
En 1998, se reportó una descripción cinemática del brazo humano usando 7 GDL y parámetros de DH con el fin de construir un dispositivo maestro para teleoperación, observando que el brazo humano posee la estructura de un mecanismo híbrido paralelo y serial [6].
Página | 1068 Derechos Reservados © 2014, SOMIM
TOMO III. Avances de la Ingeniería Mecánica en Mecánica Teórica Sociedad Mexicana de Ingeniería Mecánica A.C. Septiembre 2014
ISBN Volumen: 978-607-96746-3-2

En 1999, se publicó un estudio sobre el cálculo de los ángulos del codo (ángulo formado entre el brazo y el antebrazo) y muñeca (ángulo formado entre el antebrazo y la mano) humanos con ayuda de marcadores visuales y la descripción con matrices homogéneas [7].
En 2000, se estudiaron los mismos ángulos que el trabajo previo, usando los ángulos de Euler/Cardan y matrices de rotación[5].
En 2005 describieron al brazo completo, desde el hombro hasta la muñeca, como un mecanismo de siete GDL usando cámaras y marcadores de posición de la empresa VICON para calcular los ángulos y geometrías directamente de los sujetos voluntarios, sin que hayan trabajado en la descripción cinemática[8].
En 2006, se estudiaron ángulos del hombro con el mismo sistema de visión y marcadores en personas para caracterizar los movimientos de tres articulaciones: el hombro (ángulos formados entre el tórax y el brazo), el codo y la muñeca [9].
En 2007 se propuso la descripción cinemática únicamente del hombro humano con seis GDL: tres para la articulación externa o glenohumeral y tres para la articulación interna escapulo-torácica [10]. Adicionalmente se estudió el espacio de trabajo alcanzable del brazo humano hasta la muñeca.
El mismo año, se hizo un análisis cinemático donde distribuyeron siete GDL en tres articulaciones del brazo humano, tres en el hombro, dos en el codo y dos en la muñeca. Los investigadores emplearon índice de manipulabilidad para manipuladores redundantes [11].
Más recientemente, en 2011 se propone un estudio cinemático para sintetizar el movimiento del brazo humano y conocer cómo el humano emplea la redundancia de sus brazos, de forma que se encuentren patrones con posible uso en la robótica [12].
Hasta el momento se ha estudiado el movimiento producido por el brazo humano con ayuda de software de visión con marcadores especializado en la captación directa de los parámetros de disposición espacial de los componentes del
cuerpo de personas, se han propuesto parámetros cinemáticos de descripción tomando diferentes consideraciones de movimiento de las articulaciones de hombro, codo y muñeca. Por otro lado las aplicaciones se han enfocado en exosqueletos, dispositivos de teleoperación y análisis de posiciones para diseño ergonómico de estaciones de trabajo y las posiciones en actividades laborales.
Sin embargo, faltan modelos que describan la cinemática del conjunto de articulaciones para reproducir el movimiento del brazo que se aproxime al brazo humano real y se puedan hacer análisis de trayectorias, planeación de movimientos, determinación de fuerzas y/o reacciones en las articulaciones, sin necesidad de estudiar a individuos. Por el momento, el estudio tiene como propósito realizar el análisis cinemático del brazo humano para comprender la naturaleza del brazo humano orientado a sus posibles aplicaciones en la biomecánica.
Descripción cinemática
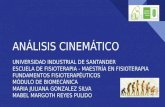
El análisis de cinemática directa en robótica es la descripción de movimientos que incluyen posición, velocidad y aceleración. En la Figura 1 se observan los ejes de movimiento para el análisis en cada articulación a estudiar.
Figura 1. Ejes de movimiento sobre articulaciones del brazo
z1
z3 z2
θ1
θ2
θ3
z4
θ4
z6
z7 z5
θ6
θ5
θ7
Brazo
Antebrazo
Mano
Página | 1069 Derechos Reservados © 2014, SOMIM
TOMO III. Avances de la Ingeniería Mecánica en Mecánica Teórica Sociedad Mexicana de Ingeniería Mecánica A.C. Septiembre 2014
ISBN Volumen: 978-607-96746-3-2

Ecuaciones cinemáticas del brazo de siete GDL Se usa la matriz de rotación genérica de Denavit Hartenberg en la ecuación 1.
𝑇 =𝑖0 �
cθ𝑖 −𝑐𝛼𝑖𝑠θ𝑖 𝑠𝛼𝑖𝑠𝜃𝑖𝑠θ𝑖 𝑐𝛼𝑖cθ𝑖 −𝑠𝛼𝑖cθ𝑖0 𝑠𝛼𝑖 𝑐𝛼𝑖
a𝑖cθ𝑖a𝑖𝑠θ𝑖𝑑𝑖
0 0 0 1
� (1)
Donde 𝑇 = �𝑅𝑜𝑡𝑎𝑐𝑖ó𝑛 (3𝑥3) 𝑃𝑜𝑠𝑖𝑐𝑖ó𝑛(1𝑥3)
0 1� (2)
Tabla 1. Parámetros DH 𝑖 𝜃𝑖 𝑑𝑖 a𝑖 𝛼𝑖 1 𝜃1 0 0 𝜋/2 2 𝜃2 + 𝜋/2 0 0 𝜋/2 3 𝜃3 + 𝜋 0 a3 0 4 𝜃4 0 a4 𝜋/2 5 𝜃5 + 𝜋/2 0 0 𝜋/2 6 𝜃6 + 𝜋/2 0 0 𝜋/2 7 𝜃7 + 𝜋/2 0 a7 0
Se obtienen las matrices de descripción cinemática: 𝑇70 = ( 𝑇10 𝑇21 𝑇32 𝑇43 𝑇54 𝑇 𝑇766
5 ) (3) Para hallar el vector de posición del órgano terminal (mano) en función de los 7GDL se tiene: 𝑃70 = ( 𝑇 1
0 𝑇21 𝑇32 𝑇43 𝑇54 𝑇 𝑇7665 )(0 0 0 1)𝑇
(4) Extrayendo únicamente los elementos del vector de posición de 𝑃70 , se tiene 𝑃𝑚𝑚𝑚𝑚 que representan las coordenadas del vector de posición del origen del sistema de referencia del órgano terminal: 𝑃𝑚𝑚𝑚𝑚 = (𝑥𝑚𝑚𝑚𝑚 𝑦𝑚𝑚𝑚𝑚 𝑧𝑚𝑚𝑚𝑚)𝑇 (5) Dichos términos se escriben a continuación en función de los ángulos y las distancias: 𝑥𝑚𝑚𝑚𝑚 = 𝑐1 (−𝑠2 𝑠3 (a4 𝑠4 + a7 𝑐4 𝑐6 𝑠7) +𝑐3 𝑠2 (a3 + a4 𝑐4 − a7 𝑐6 𝑠4 𝑠7) + a7𝑐2 (𝑐7 𝑠5 +𝑐5 𝑠6 𝑠7) + a7 𝑐34 𝑠2 (𝑐5 𝑐7 − 𝑠5 𝑠6 𝑠7)) −𝑠1 (a3 𝑠3 + a7 𝑐34 𝑐6 𝑠7 + 𝑠34 (a4 + a7 𝑐5 𝑐7 −a7 𝑠5 𝑠6 𝑠7)) (6)
𝑦𝑚𝑚𝑚𝑚 = 𝑐3((a3 + 𝑐4 (a4 + a7 𝑐5 𝑐7))𝑠1 𝑠2 +𝑐1 (a4 + a7 𝑐5 𝑐7)𝑠4) + 𝑐1 ((a3 + 𝑐4 (a4 +a7 𝑐5 𝑐7))𝑠3 + a7 (𝑐34 𝑐6 − 𝑠34 𝑠5 𝑠6)𝑠7) −𝑠1 (−a7 𝑐2 (𝑐7 𝑠5 + 𝑐5 𝑠6 𝑠7) + 𝑠2 ((a4 +a7 𝑐5 𝑐7)𝑠3 𝑠4 + a7 (𝑐6 𝑠34 + 𝑐34𝑠5 𝑠6)𝑠7))
(7)
𝑧𝑚𝑚𝑚𝑚 = a7 𝑠2 (𝑐7 𝑠5 + 𝑐5 𝑠6 𝑠7) + 𝑐2 (−𝑐3 (a3 +a4 𝑐4) − a7 𝑐34 𝑐5 𝑐7 + a7 𝑐3 (𝑐6 𝑠4 +𝑐4 𝑠5 𝑠6)𝑠7 + 𝑠3 (a7 𝑐4 𝑐6 𝑠7 + 𝑠4 (a4 −a7 𝑠5 𝑠6 𝑠7)))
(8) Las ecuaciones anteriores se emplean para calcular el punto en el espacio cartesiano x,y,z como se verá en los resultados. Empleando la Tabla 1 con las ecuaciones (1) y (3), es posible calcular la matriz completa con ayuda de programas de cómputo que resuelven modelos matemáticos simbólicos. Para el ejercicio se empleó Mathematica® de Wolfram research® La matriz de rotación 3x3 se escribe a continuación. Matriz de rotación 3x3
𝑅70 = �𝑢𝑥 𝑣𝑥 𝑤𝑥𝑢𝑦 𝑣𝑦 𝑤𝑦𝑢𝑧 𝑣𝑧 𝑤𝑧
� (9)
Donde 𝑢𝑥 = 𝑐1 (−𝑐6 𝑠2 𝑠34 𝑠7 + 𝑐2 (𝑐7 𝑠5 + 𝑐5 𝑠6 𝑠7) +𝑐34 𝑠2 (𝑐5 𝑐7 − 𝑠5 𝑠6 𝑠7)) − 𝑠1 (𝑐34 𝑐6 𝑠7 +𝑠34 (𝑐5 𝑐7 − 𝑠5 𝑠6 𝑠7)) (10) 𝑣𝑥 =−𝑐3 𝑐6 𝑐7 (𝑐4 𝑠1 + 𝑐1 𝑠2 𝑠4) + 𝑠1 (𝑐6 𝑐7 𝑠3 𝑠4 +𝑠34 (𝑐7 𝑠5 𝑠6 + 𝑐5 𝑠7)) − 𝑐1 (𝑐4 𝑐6 𝑐7 𝑠2 𝑠3 +𝑐34 𝑠2 (𝑐7 𝑠5 𝑠6 + 𝑐5 𝑠7) + 𝑐2 (−𝑐5 𝑐7 𝑠6 +𝑠5 𝑠7)) (11) 𝑤𝑥 = 𝑠1 (𝑐6 𝑠34 𝑠5 + 𝑐34 𝑠6) + 𝑐1 (𝑐2 𝑐5 𝑐6 +𝑠2 (−𝑐34 𝑐6 𝑠5 + 𝑠34 𝑠6)) (12) 𝑢𝑦 =𝑐1 𝑠34 (𝑐5 𝑐7 − 𝑠5 𝑠6 𝑠7) + 𝑠1 �−𝑐6 𝑠2 𝑠34 𝑠7 +𝑐2 (𝑐7 𝑠5 + 𝑐5 𝑠6 𝑠7)� + 𝑐34 �𝑐1 𝑐6 𝑠7 +𝑠1 𝑠2 (𝑐5 𝑐7 − 𝑠5 𝑠6 𝑠7)� (13) 𝑣𝑦 = 𝑐1 (𝑐34 𝑐6 𝑐7 − 𝑠34 (𝑐7 𝑠5 𝑠6 + 𝑐5 𝑠7)) −𝑠1 (𝑐6 𝑐7 𝑠2 𝑠34 + 𝑐34 𝑠2 (𝑐7 𝑠5 𝑠6 + 𝑐5 𝑠7) +𝑐2 (−𝑐5 𝑐7 𝑠6 + 𝑠5 𝑠7)) (14) 𝑤𝑦 = 𝑐2 𝑐5 𝑐6 𝑠1 − 𝑐34 (𝑐6 𝑠1 𝑠2 𝑠5 + 𝑐1 𝑠6) +𝑠34 (−𝑐1 𝑐6 𝑠5 + 𝑠1 𝑠2 𝑠6) (15) 𝑢𝑧 = 𝑠2 (𝑐7 𝑠5 + 𝑐5 𝑠6 𝑠7) + 𝑐2 (𝑐6 𝑠34 𝑠7 +𝑐34 (−𝑐5 𝑐7 + 𝑠5 𝑠6 𝑠7)) (16) 𝑣𝑧 = 𝑠2 (𝑐5 𝑐7 𝑠6 − 𝑠5 𝑠7) + 𝑐2 (𝑐6 𝑐7 𝑠34 +𝑐34 (𝑐7 𝑠5 𝑠6 + 𝑐5 𝑠7)) (17) 𝑤𝑧 = 𝑐5 𝑐6 𝑠2 + 𝑐2 (𝑐34 𝑐6 𝑠5 − 𝑠34 𝑠6) (18) Nota: 𝑐34 = 𝑐𝑜𝑠(𝜃3 + 𝜃4) y 𝑠34 = 𝑠𝑒𝑛(𝜃3 + 𝜃4)
Página | 1070 Derechos Reservados © 2014, SOMIM
TOMO III. Avances de la Ingeniería Mecánica en Mecánica Teórica Sociedad Mexicana de Ingeniería Mecánica A.C. Septiembre 2014
ISBN Volumen: 978-607-96746-3-2

RESULTADOS A continuación se presentan los resultados con la simulación de los movimientos generados con la cinemática directa y los ángulos empleados para generar diferentes puntos en el espacio cartesiano. El valor real para las pruebas de los parámetros son a3=0.33[m], a4=0.29[m], y a7=0.18 [m] que fueron tomadas de un sujeto de prueba. En los resultados se muestran los ángulos en grados y la posición cartesiana en metros. Con ayuda de controles de deslizamiento dentro del algoritmo de simulación, se ajustaron los ángulos en la posición deseada y se calcularon las coordenadas correspondientes. En la Tabla 3 se describen los ángulos correspondientes a los del brazo humano que se pueden apreciar con detalle en el Apéndice 1 de este documento.
Tabla 3. Relación de ángulos del modelo y
movimientos del brazo (Ver Apéndice 1) 𝜃𝑖 Movimiento del brazo Articulación 𝜃1 Rotación Interna / Externa
Hombro 𝜃2 Aducción/Abducción 𝜃3 Flexión anterior /
Extensión posterior 𝜃4 Flexión / Extensión Codo 𝜃5 Eje anteroposterior: inclina-
ción radial o cubital Muñeca
𝜃6 Pronación y supinación Antebrazo* 𝜃7 Eje transversal: flexión y
extensión Muñeca
Posición 1
θ1 θ2 θ3 θ4 θ5 θ6 θ7 0 32.4 0 75.6 0 0 7.2 [°]
𝑥𝑚𝑚𝑚𝑚 𝑦𝑚𝑚𝑚𝑚 𝑧𝑚𝑚𝑚𝑚 0.2275 0.4594 -0.3585 [m]
Posición 2
θ1 θ2 θ3 θ4 θ5 θ6 θ7 23.4 14.4 52.2 75.6 0 0 12.6 [°]
𝑥𝑚𝑚𝑚𝑚 𝑦𝑚𝑚𝑚𝑚 𝑧𝑚𝑚𝑚𝑚
-0.2661 0.5436 0.1105 [m]
Posición 3
θ1 θ2 θ3 θ4 θ5 θ6 θ7 12.6 90 52.2 75.6 0 0 12.6 [°]
𝑥𝑚𝑚𝑚𝑚 𝑦𝑚𝑚𝑚𝑚 𝑧𝑚𝑚𝑚𝑚
-0.2433 0.5651 0 [m]
Página | 1071 Derechos Reservados © 2014, SOMIM
TOMO III. Avances de la Ingeniería Mecánica en Mecánica Teórica Sociedad Mexicana de Ingeniería Mecánica A.C. Septiembre 2014
ISBN Volumen: 978-607-96746-3-2

Posición 4
θ1 θ2 θ3 θ4 θ5 θ6 θ7
12.6 90 10.8 48.6 0 0 12.6 [°]
𝑥𝑚𝑚𝑚𝑚 𝑦𝑚𝑚𝑚𝑚 𝑧𝑚𝑚𝑚𝑚 0.4094 0.5860 0 [m]
CONCLUSIONES En este trabajo se desarrolla la cinemática directa y algunas posiciones del brazo proporcionando los ángulos de cada articulación. Se obtuvieron analíticamente los puntos en los ejes de posición (x y z) y los ángulos de orientación de la mano. Se simularon los eslabones que representan al brazo en una representación gráfica en tres dimensiones con lo que se comprobó la funcionalidad de las ecuaciones.
Este estudio que incluye sólo la parte de la cinemática directa, y es un primer paso para la investigación de componentes biológicos como es el brazo humano y un modelo matemático confiable para su descripción desde el punto de vista de la robótica. Sin embargo, se está trabajando en la cinemática inversa junto con la dinámica del brazo. Reconocemos que la cinemática inversa implica el estudio de las restricciones articulares y de los movimientos realizados en forma intuitiva por el ser humano. A raíz de este trabajo, se comprenderá el comportamiento del brazo humano y sus interacciones con el medio externo aplicando la descripción desde el punto de vista de la robótica de sus elementos de movimiento. El análisis será útil en la valoración de terapias y otro tipo de prácticas médicas encaminadas a mejorar el desempeño de pacientes con problemas de movilidad de las extremidades superiores. AGRADECIMIENTOS Los autores agradecen el apoyo brindado por la DGAPA, UNAM, a través del proyecto PAPIIT IN117614, con título: "ROBÓTICA INTUITIVA, ADAPTABLE, REACTIVA, HÍBRIDA Y MÓVIL APLICADA AL SERVICIO, EL RESCATE Y LA MEDICINA” durante la realización de este trabajo.
Página | 1072 Derechos Reservados © 2014, SOMIM
TOMO III. Avances de la Ingeniería Mecánica en Mecánica Teórica Sociedad Mexicana de Ingeniería Mecánica A.C. Septiembre 2014
ISBN Volumen: 978-607-96746-3-2

Apéndice 1 Movimientos humanos del miembro superior. Ver los ángulos y movimientos representados de Tabla 3
Hombro
Rotación Interna / Externa θ1 ~180°
Aducción: Descenso del brazo.
Abducción Elevación del brazo.
θ2 ~90°
Flexión anterior Elevación del hombro en el plano sagital
θ3 ~90°
Extensión posterior
Movimiento del hombro en el plano sagital
θ3 ~45°
Codo Flexión Y Extensión.
Ángulo entre los huesos del antebrazo y el
brazo.
θ4 ~140°
Página | 1073 Derechos Reservados © 2014, SOMIM
TOMO III. Avances de la Ingeniería Mecánica en Mecánica Teórica Sociedad Mexicana de Ingeniería Mecánica A.C. Septiembre 2014
ISBN Volumen: 978-607-96746-3-2

Radio / Cúbito
Pronación y supinación
El efecto es un giro de la
mano, aunque el movimiento
empieza cercano al
codo.
θ6 ~170°
Muñeca
Eje anteroposterior:
inclinación radial o cubital La
combinación de estos permite la Circunducción.
No es posible
realizar rotación.
θ5 ~45°
Eje transversal: flexión y extensión
θ7 ~105°
Figuras tomadas de Nordin [13] REFERENCIAS
1. Craig, J.J., Introduction to Robotics: Mechanics and Control. 2005: Pearson Education, Incorporated.
2. Nordin, M. and V.H. Frankel, Basic Biomechanics of the Musculoskeletal System. 2001: Lippincott Williams & Wilkins.
3. Ren, L., Z. Qian, and L. Ren, Biomechanics of Musculoskeletal System and Its Biomimetic Implications: A Review. Journal of Bionic Engineering, 2014. 11(2): p. 159-175.
4. Khatib, O., et al., Robotics-based synthesis of human motion. Journal of Physiology-Paris, 2009. 103(3-5): p. 211-219.
5. Rau, G., C. Disselhorst-Klug, and R. Schmidt, Movement biomechanics goes upwards: from the leg to the arm. Journal of Biomechanics, 2000. 33(10): p. 1207-1216.
6. Choi, J., et al. Design and characteristic analysis of 7 DOF hybrid master arm with human arm kinematics. 1998. Anaheim, CA, USA: ASME.
7. Schmidt, R., et al., A marker-based measurement procedure for unconstrained wrist and elbow motions. Journal of Biomechanics, 1999. 32(6): p. 615-621.
8. Rosen, J., et al. The human arm kinematics and dynamics during daily activities - toward a 7 DOF upper limb powered exoskeleton. in Advanced Robotics, 2005. ICAR '05. Proceedings., 12th International Conference on. 2005.
9. Williams, S., et al., An upper body model for the kinematical analysis of the joint chain of the human arm. Journal of Biomechanics, 2006. 39(13): p. 2419-2429.
10. Klopcar, N., M. Tomsic, and J. Lenarcic, A kinematic model of the shoulder complex to evaluate the arm-
Página | 1074 Derechos Reservados © 2014, SOMIM
TOMO III. Avances de la Ingeniería Mecánica en Mecánica Teórica Sociedad Mexicana de Ingeniería Mecánica A.C. Septiembre 2014
ISBN Volumen: 978-607-96746-3-2

reachable workspace. Journal of Biomechanics, 2007. 40(1): p. 86-91.
11. Rodríguez, C.F., J.C. Botero, and H. Quintero, Aplicación de la teoría de robots manipuladores a la biomecánica del brazo humano. Revista Iberoamericana de Automática e Informática Industrial, 2007. 4(4): p. 51-57.
12. Zanchettin, A.M., et al. Kinematic analysis and synthesis of the human arm motion during a manipulation task. in Robotics and Automation (ICRA), 2011 IEEE International Conference on. 2011.
13. Nordin, M.F., Biomécanica básica del sistema musculoesquelético. Ed. 3 ed. 2001, España: McGraw Hill- Interamericana.
Página | 1075 Derechos Reservados © 2014, SOMIM
TOMO III. Avances de la Ingeniería Mecánica en Mecánica Teórica Sociedad Mexicana de Ingeniería Mecánica A.C. Septiembre 2014
ISBN Volumen: 978-607-96746-3-2