Una introducci´on a la geometr´ıa hiperb´olica … · nas propiedades de los grupos discretos...
177
Una introducci´ on a la geometr´ ıa hiperb´ olica bidimensional Antonio Lascurain Orive 2 de febrero de 2005
Transcript of Una introducci´on a la geometr´ıa hiperb´olica … · nas propiedades de los grupos discretos...
Una introduccion a la geometrıa hiperbolicabidimensional
Antonio Lascurain Orive
2 de febrero de 2005
ii
Prefacio
La geometrıa hiperbolica ha cobrado enorme importancia en las ultimasdecadas por su interrelacion con multiples ramas centrales de la matematica.A principio de los anos ochenta, Troels Jørgensen y Wiliam Thurston (meda-lla Fields) revolucionaron la topologıa al mostrar que la geometrıa hiperbolicaes una poderosa herramienta en el estudio de las 3-variedades y los nudos (cf.[22] y [3] pp. 190-272). Dennis Sullivan y Curt Mc Mullen (medalla Fields),por su parte, han encontrado un importante paralelismo entre la geometrıahiperbolica y los sistemas dinamicos, lo cual se hace patente al observar laasombrosa similitud que existe entre el conjunto lımite de un grupo kleinianoy el conjunto de Julia de una funcion racional (cf. [13] y Figura 3.1). Porotro lado, en el modelo del hiperboloide, el grupo completo de isometrıases precisamente el grupo de Lorentz, lo cual refleja la estrecha relacion de lateorıa de la relatividad con la geometrıa hiperbolica. En otro ambito, el grupoclasico modular y sus subgrupos son centrales en la teorıa de los numeros ytambien en la geometrıa hiperbolica. Mas aun, recientemente se han probadoimportantes resultados sobre grupos aritmeticos kleinianos, que vinculan lateorıa de numeros, la topologıa y la geometrıa hiperbolica (cf. [12]). Es impor-tante destacar tambien que en el contexto de la variable compleja, cualquiersuperficie de Riemann es el cociente de la accion discontinua de un grupo deMobius en la esfera (cf. [2] pp. 120 y 121 y [19]). Existen ademas conexionesde muchas otras ramas con la geometrıa hiperbolica; mencionamos dos degran importancia en la actualidad: la teorıa de los mapeos cuasiconformes yla teorıa de Teichmuller (cf. [11] y [16]).
Este texto esta dirigido principalmente a los estudiantes de los ultimosniveles de la licenciatura que han aprobado un primer curso de variable com-pleja; sin embargo, considero que puede ser tambien de utilidad para losalumnos de posgrado y para los profesores e investigadores que no son es-pecialistas en geometrıa hiperbolica. La idea original de este trabajo fueadaptar para la licenciatura algunos temas del libro de maestrıa de Joseph
iii
iv
Lehner [10]; texto recomendado por Troels Jørgensen, y muy adecuado parallegar de manera rapida y formal al estudio de las regiones fundamentales.No obstante, la materia fundamental del presente libro son las notas queelabore para los seminarios de geometrıa, algebra y analisis, de los ultimosniveles de la licenciatura, donde ensene temas basicos de geometrıa hiperboli-ca, los grupos fuchsianos y las transformaciones de Mobius. Es mi intenciontambien en este trabajo hacer mas accesibles algunas de las ideas del impor-tante libro de Alan F. Beardon [2], en particular el estudio del grupo generalde Mobius. Aunque la naturaleza del contenido es en general bidimensional,en diversas partes se senalan generalizaciones a dimensiones mayores, y al-gunas veces tambien se prueban. El espıritu del libro es el de mostrar que lasmatematicas no son ramas aisladas sino que interactuan fuertemente unascon otras. En este texto el lector podra observar como se mezclan temas delos cursos de algebra moderna I, analisis matematico I, variable compleja Iy topologıa. El texto puede ser cubierto en un curso semestral, omitiendo sies necesario la mayorıa de los resultados de la ultima seccion del segundocapıtulo.
El enfoque del libro es analıtico y no axiomatico. Este inicia con el estu-dio de las transformaciones de Mobius complejas actuando en la esfera paraposteriormente mostrar los grupos completos de isometrıas hiperbolicas en elmodelo del semiplano y en el del disco de Beltrami-Poincare, ası como algu-nas propiedades de los grupos discretos de PSL(2,C) y del caracter fractalde su conjunto lımite. El texto concluye en el ambito de las teselaciones conla construccion de las regiones fundamentales de Dirichlet y Ford. Uno de losobjetivos es presentar de manera formal y sistematica una introduccion a lospolıgonos fundamentales. Para el caso de los subgrupos modulares, estos do-minios son de gran utilidad para visualizar resultados numericos, vease, porejemplo, [7] y [9]. En el caso kleiniano, el conocimiento de poliedros funda-mentales es una herramienta muy importante en la topologıa tridimensional(cf. [12]).
Se han escrito muchos textos avanzados sobre el tema en las ultimasdecadas, probablemente los mas importantes son [2], [3], [12], [14], [16], [20]y [22]. Algunos otros libros en espanol, dirigidos a los estudiantes de licen-ciatura, sobre otros temas de la geometrıa hiperbolica de los que se presentanen este libro –o con otros enfoques– son [17], [18], [15] y [23].
Las Figuras 2.9 y 3.1 fueron tomadas de las paginas de Curt Mc Mulleny David Wright, respectivamente. Asımismo, la Figura 4.11 fue tomada dellibro de Joseph Lehner [10].
Agradecimientos
A Troels Jørgensen, por sus invaluables ensenanzas.
A mi esposa, Adda Stella Ordiales de la Garza, por su apoyo constante ypor la correccion de estilo del texto.
A mis padres, que me guiaron al conocimiento.
A Pablo Rosell Gonzalez, por la cuidadosa elaboracion de las figuras deltexto.
A mis tesistas y alumnos de los seminarios, con quienes compartı el estu-dio de la geometrıa hiperbolica, particularmente, Alejandro Mozo Cruz, queinicio la captura de algunos temas del libro.
A mis colegas del seminario sobre el libro de Alan Beardon que se llevo acabo a principio de los anos noventa, en particular, a Pilar Martınez Tellezy Francisco Struck Chavez, miembros permanentes del seminario.
A las autoridades de la Facultad de Ciencias y la Direccion General deAsuntos del Personal Academico que me apoyaron en la publicacion de estelibro, con el proyecto de PAPIME EN107-403.
v
vi

Contenido
1. Transformaciones de Mobius complejas 11.1. Proyeccion estereografica, metrica cordal . . . . . . . . . . . . 11.2. Propiedades basicas . . . . . . . . . . . . . . . . . . . . . . . . 81.3. Clasificacion por conjugacion . . . . . . . . . . . . . . . . . . . 201.4. Geometrıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.4.1. Transformaciones elıpticas . . . . . . . . . . . . . . . . 261.4.2. Transformaciones hiperbolicas . . . . . . . . . . . . . . 271.4.3. Transformaciones loxodromicas . . . . . . . . . . . . . 291.4.4. Transformaciones parabolicas . . . . . . . . . . . . . . 29
1.5. Transformaciones que preservan “discos” . . . . . . . . . . . . 321.6. Clasificacion por la traza . . . . . . . . . . . . . . . . . . . . . 37
2. Metrica hiperbolica 432.1. Densidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.2. El modelo del semiplano . . . . . . . . . . . . . . . . . . . . . 472.3. El modelo del disco de Poincare . . . . . . . . . . . . . . . . . 592.4. El grupo completo de isometrıas . . . . . . . . . . . . . . . . . 64
3. Grupos fuchsianos 873.1. Discontinuidad . . . . . . . . . . . . . . . . . . . . . . . . . . 873.2. Grupos Discretos. . . . . . . . . . . . . . . . . . . . . . . . . . 1013.3. Conjunto lımite de un grupo discreto . . . . . . . . . . . . . . 118
4. Regiones fundamentales 1314.1. Regiones fundamentales . . . . . . . . . . . . . . . . . . . . . 1314.2. Construccion del polıgono de Dirichlet . . . . . . . . . . . . . 1404.3. Polıgono de Ford . . . . . . . . . . . . . . . . . . . . . . . . . 156
vii
Capıtulo 1
Transformaciones de Mobiuscomplejas
Se proyecta el plano complejo extendido a la esfera de Riemann, uno de losespacios naturales donde actuan las transformaciones de Mobius complejas,y de esta manera se introduce la metrica cordal. Posteriormente, estas fun-ciones se identifican con los elementos del grupo PSL(2,C) y se exhiben suspropiedades basicas. Mediante la conjugacion a formas canonicas, se clasifi-can y se muestran sus propiedades geometricas elementales. Finalmente, secaracterizan las transformaciones que preservan el semiplano superior y eldisco unitario, y se establece la clasificacion por la traza.
1.1. Proyeccion estereografica, metrica cordal
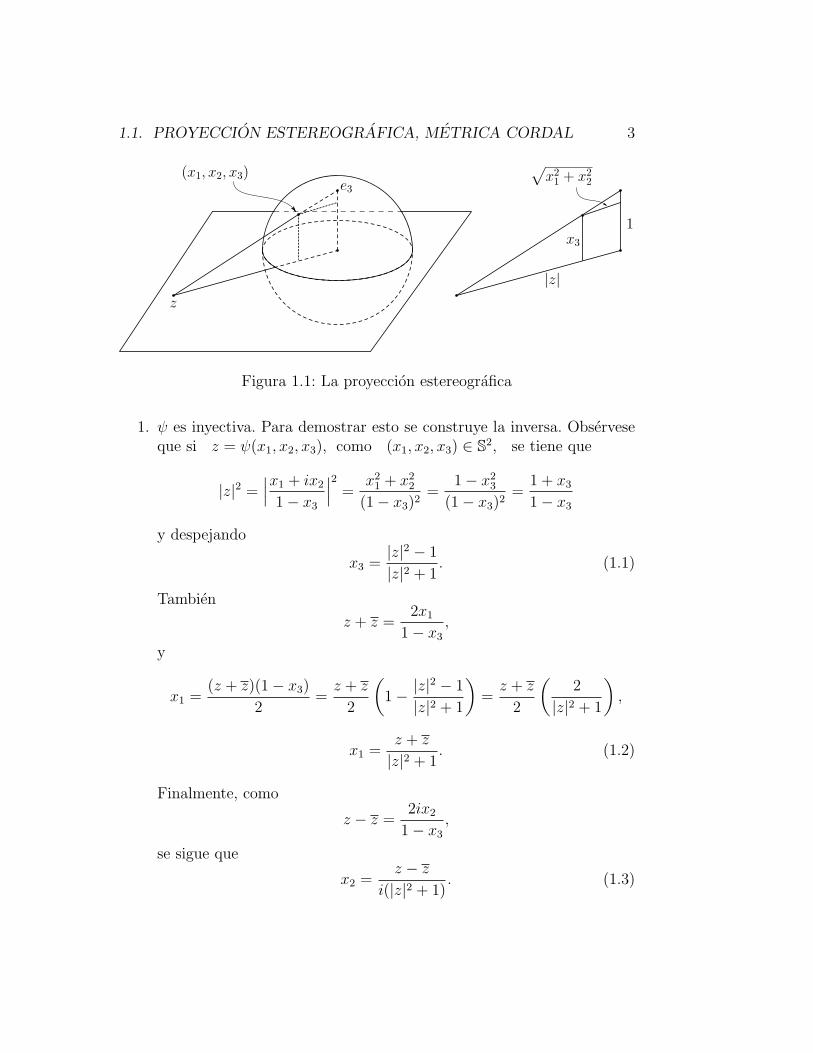
La proyeccion central descrita en la Figura 1.1 sugiere que el plano complejose puede pensar como la esfera unitaria en R3 sin el polo norte. Resultanatural, entonces, pensar que el polo norte corresponde a un punto ideal querepresenta al infinito.
Definicion 1 Los puntos del plano complejo junto con ∞ forman el planocomplejo extendido, denotado por C.
El incluir el sımbolo ∞ es particularmente util en el contexto de lastransformaciones de Mobius complejas
z 7−→ az + b
cz + d, ad− bc 6= 0, a, b, c, d ∈ C.
1

2 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
Mostraremos que estas funciones son las unicas biyecciones meromorfas deC en C. La esfera unitaria,
S2 = {x ∈ R3∣∣ |x| = 1},
llamada esfera de Riemann, es el modelo requerido para incluir el puntoal infinito. Para asociar cada punto en el plano con uno en S2, usamos lasiguiente idea geometrica: se toma el plano x3 = 0 como el plano complejoC, y la lınea que proyecta el polo norte e3 = (0, 0, 1) de la esfera de Riemanna cualquier otro punto x = (x1, x2, x3) en dicha esfera.
Esta lınea cruza el plano complejo en un unico punto, para encontrarlose parametriza
e3 + t(x− e3), t ∈ Ry se debe cumplir
[e3 + t(x− e3)] · e3 = 0,
1 + t(x− e3) · e3 = 0,
t =1
1− x3
.
De donde, el punto asociado a x es
e3 +1
1− x3
(x− e3)
= e3 +
(x1
1− x3
,x2
1− x3
,x3 − 1
1− x3
)=
(x1
1− x3
,x2
1− x3
, 0
)Una prueba geometrica de este hecho se obtiene observando que la proyec-
cion de x debe tener la direccion de (x1, x2), y por semejanza se obtieneque
|z|1
=
√x2
1 + x22
1− x3
(vease la Figura 1.1). Con base en estas ideas, se define la funcion
ψ : S2 − {e3} 7−→ C, dada por (x1, x2, x3) 7−→x1 + ix2
1− x3
.
Se afirma que ψ es una biyeccion de S2 − {e3} al plano complejo C.
1.1. PROYECCION ESTEREOGRAFICA, METRICA CORDAL 3
e3
z
(x1, x2, x3)
|z|
1x3
√
x2
1+ x
2
2
Figura 1.1: La proyeccion estereografica
1. ψ es inyectiva. Para demostrar esto se construye la inversa. Observeseque si z = ψ(x1, x2, x3), como (x1, x2, x3) ∈ S2, se tiene que
|z|2 =∣∣∣x1 + ix2
1− x3
∣∣∣2 =x2
1 + x22
(1− x3)2=
1− x23
(1− x3)2=
1 + x3
1− x3
y despejando
x3 =|z|2 − 1
|z|2 + 1. (1.1)
Tambien
z + z =2x1
1− x3
,
y
x1 =(z + z)(1− x3)
2=z + z
2
(1− |z|2 − 1
|z|2 + 1
)=z + z
2
(2
|z|2 + 1
),
x1 =z + z
|z|2 + 1. (1.2)
Finalmente, como
z − z =2ix2
1− x3
,
se sigue que
x2 =z − z
i(|z|2 + 1). (1.3)
4 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
Por consiguiente, ψ es inyectiva, ya que z determina (x1, x2, x3).Observese tambien que la funcion
π(z) =
(z + z
|z|2 + 1,
z − z
i(|z|2 + 1),|z|2 − 1
|z|2 + 1
)es inversa por la izquierda de ψ.
2. ψ es sobre. Un calculo sencillo muestra que π es tambien una inversaderecha de ψ (ejercicio).
Haciendo corresponder ∞ con el polo norte e3 se obtiene una biyeccionde S2 en C y el modelo buscado. A esta biyeccion se le llama la proyeccionestereografica. Geometricamente es evidente que el hemisferio sur (x3 < 0)corresponde al disco unitario
∆ = {z ∈ C∣∣ |z| < 1}
y el hemisferio norte (x3 > 0) al exterior de este disco; la formula (1.1)tambien, muestra este hecho de manera analıtica.
En esta representacion esferica del plano complejo no hay una inter-pretacion facil de la suma y el producto, su ventaja radica en que ∞ noes un punto distinguido. Convendremos que toda recta es un subconjuntode C que incluye al sımbolo ∞ , es decir, que toda recta pasa por ∞. Unapropiedad fundamental de la proyeccion estereografica la exhibe el siguienteresultado.
Proposicion 1.1.1 Bajo la proyeccion estereografica, rectas en C y cırculosen C se transforman en cırculos en S2 y viceversa.
Demostracion.
1. Un cırculo en S2 es la interseccion de un plano con la esfera, por loque sus puntos satisfacen una ecuacion de la forma
ax1 + bx2 + cx3 = d.
Por lo tanto, este cırculo es la imagen bajo la proyeccion estereograficade un conjunto cuyos puntos satisfacen la siguiente ecuacion en el plano
a( z + z
|z|2 + 1
)+ b
( z − z
i(|z|2 + 1)
)+ c
( |z|2 − 1
|z|2 + 1
)= d.

1.1. PROYECCION ESTEREOGRAFICA, METRICA CORDAL 5
Escribiendo z = x+ iy, se obtiene
2ax+ 2by + c(x2 + y2 − 1) = d(x2 + y2 + 1),
que es la ecuacion de una recta o un cırculo en el plano, dependiendo sid = c o si d 6= c (al completar cuadrados no se puede obtener un radionegativo, puesto que se trata de la imagen de un conjunto no vacıo).
2. Viceversa, una recta en el plano esta definida por la ecuacion
ax+ by = c.
Estos puntos bajo la proyeccion estereografica son llevados al conjuntode puntos en la esfera definidos por la ecuacion
a( x1
1− x3
)+ b
( x2
1− x3
)= c,
a x1 + b x2 = c(1− x3),
los cuales estan contenidos en la interseccion de un plano y la esfera,es decir, se trata de un cırculo. Como π(∞) = (0, 0, 1) satisface dichaecuacion, este cırculo pasa por el polo norte, lo cual tambien es evidentea partir de la construccion geometrica.
Finalmente, un cırculo en el plano esta definido por las siguientesecuaciones
| z − a |2= r2,
(z − a)(z − a) = r2,
|z|2 − az − az + |a|2 = r2,
por lo que usando 1.1, se tiene
1 + x3
1− x3
− 2Re(az) = r2 − |a|2.
Si a = a1+i a2, z = x+iy, entonces Re(az) = a1x+a2y y la imagendel cırculo en la esfera esta definida por las siguientes ecuaciones
1 + x3
1− x3
− 2(a1x+ a2y) = r2 − |a|2,
1 + x3
1− x3
− 2a1x1
1− x3
− 2a2x2
1− x3
= r2 − |a|2,
1 + x3 − 2a1x1 − 2a2x2 = (r2 − |a|2)(1− x3).

6 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
Se sigue entonces que estos puntos estan contenidos en un plano y porlo tanto constituyen un cırculo en la esfera. �
Es util obtener, en terminos de z y z′, puntos del plano complejo, unaformula de la distancia entre sus proyecciones en la esfera. Si denotamos estaspor (x1, x2, x3) y (x′1, x
′2, x
′3), se tiene
(x1 − x′1)2 + (x2 − x′2)
2 + (x3 − x′3)2 = 2− 2(x1 x
′1 + x2 x
′2 + x3 x
′3).
Ahora, usando (1.1), (1.2) y (1.3), se sigue que
x1 x′1 + x2 x
′2 + x3 x
′3
=
(z + z
|z|2 + 1
) (z′ + z′
|z′|2 + 1
)−
(z − z
|z|2 + 1
) (z′ − z′
|z′|2 + 1
)+
(|z|2 − 1
|z|2 + 1
) (|z′|2 − 1
|z′|2 + 1
)=
2 z z′ + 2 z z′ + |z z′|2 − |z|2 − |z′|2 + 1
(1 + |z|2) (1 + |z′|2)
=−2(z − z′)(z − z′) + (1 + |z|2) (1 + |z′|2)
(1 + |z|2) (1 + |z′|2)(el ultimo paso equipara numerador y denominador).
Por consiguiente,
(x1 − x′1)2 + (x2 − x′2)
2 + (x3 − x′3) = 2− 2
(1− 2|z − z′|2
(1 + |z|2) (1 + |z′|2)
)
=4|z − z′|2
(1 + |z|2) (1 + |z′|2).
Esta nueva formula de distancia en C es particularmente novedosa y utilpor incluir el punto al infinito. En este caso, si z′ = ∞, se tiene
x1 x′1 + x2 x
′2 + x3 x
′3 =
|z|2 − 1
|z|2 + 1,
por lo que
(x1 − x′1)2 + (x2 − x′2)
2 + (x3 − x′3) = 2− 2
(|z|2 − 1
|z|2 + 1
)=
4
1 + |z|2.
Estos calculos inducen la metrica buscada en C.

1.1. PROYECCION ESTEREOGRAFICA, METRICA CORDAL 7
Definicion 2 Se define la metrica cordal en el plano complejo extendido dela siguiente manera
dC(z1, z2) =
2|z1 − z2|√
1 + |z1|2√
1 + |z2|2, si z1, z2 6= ∞.
2√1 + |z1|2
, si z2 = ∞.
Como S2 es un subespacio metrico de R3, esta distancia define en efectouna metrica en C. El termino cordal proviene de que se miden cuerdas enla esfera
dC(z1, z2) = |π(z1)− π(z2)|.
Proposicion 1.1.2 Las metricas cordal y euclideana inducen la misma topo-logıa en C, es decir, definen los mismos abiertos en C. Ademas
dC(zn,∞) 7−→ 0 si y solo si |zn| 7−→ ∞.
Demostracion. Para la primera parte hay que probar que la funcion iden-tidad
Id : CE 7−→ CC
es bicontinua, donde CE es el plano complejo provisto con la metrica eucli-deana y CC , con la metrica cordal.
Si |zn − z| → 0, cuando n → ∞, entonces |π(zn) − π(z)| → 0, cuandon→∞, ya que la funcion π es continua, lo cual prueba que la funcion Id estambien continua. Ahora, por la continuidad de ψ, si dC(zn, z) → 0, cuandon → ∞, entonces |π(zn) − π(z)| → 0 y |ψ π(zn) − ψ π(z)| = |zn − z| → 0,cuando n→∞.
Para la segunda parte, sea zn, n ∈ N, una sucesion en C, tal que|zn| → ∞, cuando n→∞, como
dC(zn,∞) =2√
1 + |zn|2,
se sigue que dC(zn,∞) → 0 (ejercicio).
Por otra parte, si dC(zn,∞) → 0, cuando n→∞, dado ε > 0, existeNε,tal que si n > Nε, se tiene
2√1 + |zn|2
< ε y por lo tanto |zn| >√
4
ε2− 1

8 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
(ya que se puede tomar ε < 2). Por lo que, dado M > 0, tomando ε tal que
M =
√4
ε2− 1,
se obtiene |zn| > M, si n > Nε y |zn| → ∞. �
EJERCICIOS 1.1
1. Demuestre que la funcion estereografica (x1, x2, x3) → x1+ix2
1−x3de la esfera
de Riemann en el plano complejo extendido es suprayectiva.
2. Demuestre que si zn → ∞, cuando n → ∞, entonces dc(zn,∞) → 0,cuando n→∞.
1.2. Propiedades basicas
Recordamos que a las transformaciones de variable compleja de la forma
T (z) =az + b
cz + d,
a, b, c, d ∈ C, ad − bc 6= 0, se les llama de Mobius. Estas funciones estantambien definidas en los puntos del plano complejo extendido, donde no seaplica el algebra:
(i) Si c = 0, se define T (∞) = ∞.
(ii) Si c 6= 0, se define T (∞) = a/c y T (−d/c) = ∞.
Si ad − bc = 0, se trata de una funcion constante (ejercicio). Para otrosvalores ad− bc = k 6= 0, la transformacion
z 7−→
a√kz +
b√k
c√kz +
d√k
tiene la misma regla de correspondencia que la transformacion original, sinembargo,
a√k
d√k− b√
k
c√k
= 1.

1.2. PROPIEDADES BASICAS 9
De este hecho se sigue que todas las transformaciones de Mobius puedendefinirse por matrices de la forma(
a bc d
), a, b, c, d ∈ C, ad− bc = 1.
A este grupo de matrices se le denota por SL(2,C). El centro de este grupoconsiste de las matrices ±Id (ejercicio).
Proposicion 1.2.1 Las transformaciones de Mobius complejas son funcionescontinuas en C con la metrica cordal.
Demostracion. Se sigue de la proposicion 1.1.2 que basta probar la con-tinuidad en ∞ y en −d/c, si c 6= 0, y en ∞, si c = 0.
Ahora, si c 6= 0 y zn → −d/c, cuando n→∞, se tiene que como
azn + b
c7−→ (−d/c) a+ b
cy
1
zn − (−d/c)7−→ ∞,
entoncesazn + b
czn + d=
azn + b
c(zn − (−d/c))7−→ ∞
y por lo tanto
dC
(azn + b
czn + d, ∞
)7−→ 0, cuando n 7−→ ∞.
La prueba de la continuidad en ∞ es similar y queda como ejercicio parael lector. �
Por otra parte, el producto de matrices se corresponde con la composicionde transformaciones de Mobius, es decir, si
T (z) =az + b
cz + dy S(z) =
αz + β
γz + δ
son dos transformaciones de Mobius definidas por las matrices
T =
(a bc d
), S =
(α βγ δ
),
entonces la transformacion S T es de Mobius y esta definida por la matriz
S T =
(α βγ δ
) (a bc d
)=
(αa+ βc αb+ βdγa+ δc γb+ δd
).

10 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
Esto se sigue ya que ∀z ∈ C, salvo por un numero finito de puntos (dondeel algebra no se aplica), se tiene
S(T (z)
)=α(az + b
cz + d
)+β
γ(az + b
cz + d
)+δ
=α(az + b) + β(cz + d)
γ(az + b) + δ(cz + d)=
(αa+ βc)z + αb+ βd
(γa+ δc)z + γb+ δd.
Por lo cual, las transformaciones S T y la definida por la matriz S T coin-ciden en C, excepto, quiza, por un numero finito de puntos, sin embargo, alser ambas funciones continuas, son iguales.
En particular, las transformaciones de Mobius son biyecciones, ya que siT esta definida por la matriz
T =
(a bc d
)∈ SL(2,C),
la transformacion inversa T−1
esta definida por
T−1 =
(d −b−c a
).
Por consiguiente, estas transformaciones forman un grupo, la identidades la funcion
z 7−→ 1 z + 0
0 z + 1.
Con frecuencia es importante distinguir las transformaciones de las matricesque las definen, por lo que denotaremos las primeras con una barra arriba ylas segundas sin barra.
Proposicion 1.2.2 Dos transformaciones de Mobius
T (z) =az + b
cz + dy S(z) =
a′z + b′
c′z + d ′
son iguales si y solo si existe k ∈ C, tal que
a = ka′, b = kb′, c = kc′, d = kd ′.

1.2. PROPIEDADES BASICAS 11
Demostracion. La condicion de suficiencia es inmediata. Para probar lanecesidad observese primero que como T y S coinciden en 0 y ∞, setiene que si a = 0, entonces a′ = 0, y si b = 0, entonces b′ = 0, etcetera.Probamos primero el caso a, b, c, d 6= 0, se tiene que
T−1
(∞) = −d/c = −d ′c′, y T−1
(0) = −b/a = −b′/a′.
Escribiendo
d/d ′ = c/c′ = λ, b/b′ = a/a′ = µ,
se sigue queaz + b
cz + d=
µ a′z + µ b′
λ c ′z + λ d ′=µ
λ
(a′z + b′)
(c ′z + d ′).
En particular, al evaluar S y T en la preimagen de 1, se tiene µ/λ = 1,por lo cual µ = λ.
Los casos en los que algun coeficiente es cero son mas sencillos, mostramosdos de ellos y dejamos los cuatro restantes como ejercicio.
(i) Si b, c = 0, evaluando en 1 se tiene a/d = a′/d ′ y a/a′ = d/d ′.
(ii) Si c = 0 y b 6= 0, como el primer caso, b/b′ = a/a′ = µ y para algunaλ, d = λ d ′, etcetera. �
De la proposicion anterior se sigue que hay exactamente dos matricesunimodulares que determinan una transformacion de Mobius dada. Esto es,ya que si T es de Mobius y esta definida por las matrices(
a bc d
),
(a′ b′
c′ d ′
)∈ SL(2,C),
entonces
1 = a′d ′ − b′c′ = k2(ad− bc) = k2
y
k = ±1, i.e.
(a′ b′
c′ d ′
)= ±
(a bc d
).
Al cociente de SL(2,C) sobre su centro ±Id se le llama su proyec-tivizacion, este grupo cociente, denotado por PSL(2,C), es isomorfo algrupo de transformaciones de Mobius complejas. La afirmacion anterior es
12 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
consecuencia de las ultimas observaciones y del primer teorema de isomorfis-mo de grupos (cf. [4] p. 50), ya que si µC denota el grupo de transformacionesde Mobius, se tiene el siguiente diagrama de sucesiones exactas
±Id � SL(2,C) � PSL(2,C).�
µC '
De ahora en adelante identificaremos al grupo de transformaciones de Mobiuscon PSL(2,C).
ejemplos de transformaciones de Mobius
(1) Las traslacionesT (z) = z + b, b ∈ C.
z
b
z + b
Figura 1.2: Traslaciones
(2) Las rotacionesT (z) = az, a = eiθ.
(3) Las homoteciasT (z) = kz, k ∈ R+.
(4) Las composiciones de homotecias seguidas de rotaciones
T (z) = az, |a| 6= 1, 0, a /∈ R+.
1.2. PROPIEDADES BASICAS 13
z
az
θ
Figura 1.3: Rotaciones
z
kz
kz
z
Figura 1.4: Dilatacion y contraccion
(5) La transformacionT (z) = 1/z,
que es la composicion de la inversion en el cırculo unitario
z → z/ |z|2 = 1/ z,
seguida de la reflexion en el eje real (conjugacion).
Se describe ahora las propiedades de conformalidad de estas transforma-ciones ası como sus singularidades (polos). Observese que una transformacionde Mobius
T (z) =az + b
cz + d
tiene un polo simple en −d/c, si c 6= 0, y es entera si c = 0.

14 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
1/z
1/z
z
Figura 1.5: z 7−→ 1/z
En general, dada una funcion holomorfa f definida en una vecindad de∞ , se dice que f es holomorfa en ∞ (o que f tiene un polo de orden k en∞ ), si la funcion g definida en una vecindad del cero por
g(z) = f (1/z)
es holomorfa en cero ( o tiene un polo de orden k en cero). Observese que si∞ no es una singularidad esencial, entonces necesariamente se tiene una delas dos posibilidades antes mencionadas.
La eleccion 1/z en esta definicion no es arbitraria. Por una parte, esuna eleccion natural de cartas coordenadas para proveer de estructura desuperficie de Riemann a la esfera S2 (cf. [2], p. 117), por otra parte, laaccion de z → 1/z en S2 esta dada por la rotacion
(x1, x2, x3) 7−→ (x1,−x2,−x3)
(ejercicio).Con esta convencion se tiene que si
f(z) =az + b
cz + d
es de Mobius y c 6= 0, entonces f es holomorfa en ∞ y tiene un polo simpleen −d/c. Para el caso c = 0, f tiene un polo simple en ∞. Mostramos laprimera afirmacion y dejamos las dos restantes como ejercicio. Cerca de ∞
f(z) =az + b
cz + d=a+ b/z
c+ d/z7−→ a
c,

1.2. PROPIEDADES BASICAS 15
cuando z →∞, y cerca de 0
g(z) =a/z + b
c/z + d=a+ bz
c+ dz7−→ a
c,
cuando z → 0, por lo que 0 es una singularidad removible de g.
Volviendo al contexto general de una funcion f : C → C meromorfa,se sigue del teorema de Liouville que si f es entera en C, entonces f esconstante. Por otra parte, si f es entera en C y f tiene un polo en ∞,entonces f es necesariamente un polinomio. Esto es consecuencia del teoremade las desigualdades de Cauchy y el principio de continuacion analıtica; quedacomo ejercicio la verificacion de los detalles. Estos resultados basicos de lavariable compleja se pueden consultar, por ejemplo, en [5] (pp. 170, 397).
Este hecho tiene una interesante y fundamental consecuencia: toda fun-cion meromorfa en la esfera es necesariamente racional. Esto se sigue, ya quesi f : C → C es meromorfa, entonces por compacidad f tiene solamente unnumero finito de polos, y es claro que al multiplicar a f por un polinomioadecuado, se obtiene una funcion constante u otro polinomio. En particular,las unicas biyecciones meromorfas de la esfera en la esfera son las de Mobius.
Definicion 3 Sea A un abierto en Rn y f : A ⊂ Rn → Rn diferenciableen A, se dice que f es conforme en x0 ∈ A, si Df(x0) es un multiploescalar de una transformacion ortogonal.
Se sigue de las ecuaciones de Cauchy-Riemann que la definicion de confor-malidad para funciones analıticas –de los cursos basicos de variable compleja–es una caso particular de esta definicion mas general, que ademas incluye a lasreflexiones. Observese tambien que la conformalidad implica que se preservanlos valores absolutos de los angulos.
Para el caso de una transformacion de Mobius
T (z) =az + b
cz + d, se tiene T ′(z) =
ad− bc
(cz + d)2,
si T no fija a ∞ y T ′(z) = a/d, si ∞ es un punto fijo. Por lo cual, estastransformaciones son conformes en el plano complejo, salvo en el punto −d/c,si c 6= 0. Sin embargo, si se considera las transformaciones de Mobius comobiyecciones de la esfera S2 en sı misma, provista con estructura de superficiede Riemann, no es difıcil probar que hay conformalidad en todos los puntos,incluyendo ∞.

16 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
Alternativamente, se puede tomar el grupo formado por las composi-ciones finitas de reflexiones en esferas o planos en R3, denominado tambiende Mobius, que contiene como subgrupo a las extensiones de PSL(2,C) a
R3 (llamadas de Poincare). Resulta que la reflexion en la esfera con centroen e3 = (0, 0, 1) y radio
√2 es una extension de la proyeccion estereografi-
ca, y al conjugar las extensiones de Poincare de PSL(2,C) con la reflexionen el plano complejo, seguida de la reflexion en dicha esfera, se obtiene ungrupo –denotado por M(B 3)– cuyos elementos transforman la esfera de Rie-mann conforme y biyectivamente en sı misma. En particular, estas funcionespreservan los angulos en todos los puntos de la esfera. Esto se sigue, ya quelos elementos de M(B 3) son composiciones finitas de reflexiones en esferaso planos ortogonales a S2. Algunos de estos resultados se probaran en elsiguiente capıtulo, una prueba completa se puede deducir de [2], pp. 25,27,31, 33, 37, 58.
Se tiene ademas que la proyeccion estereografica es conforme en C. Unademostracion elemental de este hecho se puede consultar en [6] p. 36. Estapropiedad tambien es consecuencia directa de que la proyeccion estereograficaes la restriccion de una reflexion en una esfera en R3; mostraremos en elsiguiente capıtulo que estas reflexiones son conformes.
Los siguientes dos teoremas establecen propiedades geometricas funda-mentales de las transformaciones de Mobius. Escribiremos “cırculos” paradenotar cırculos o rectas. Primero probamos un resultado que describe laestructura de las transformaciones de Mobius.
Lema 1.2.3 Cualquier transformacion en PSL(2,C) se puede expresar co-mo la composicion de traslaciones, rotaciones, homotecias y la transforma-cion z → 1/z.
Demostracion. Una transformacion en PSL(2,C) que fija ∞ es de laforma
z 7−→ a
dz +
b
d,
es decir, es una composicion de homotecias, rotaciones y traslaciones.Si la funcion de Mobius no fija ∞, entonces se puede expresar como
z 7−→ az + b
cz + d=
a
c(cz + d) + b− ad
ccz + d
=a
c+b− ad
ccz + d
,
y es por lo tanto composicion de algunas de las transformaciones descritasen el enunciado del lema. �

1.2. PROPIEDADES BASICAS 17
El siguiente resultado muestra que las transformaciones de Mobius tienenun caracter inversivo, ya que preservan la familia de todos los “cırculos”. Esteresultado se generaliza a cualquier dimension (vease [2] p. 28).
Teorema 1.2.4 Las funciones de Mobius en PSL(2,C) transforman “cırcu-los” en “cırculos”.
Demostracion. Basta probar que la transformacion z → 1/z tiene lapropiedad mencionada, ya que evidentemente las traslaciones, las rotacionesy las homotecias transforman cırculos en cırculos y rectas en rectas. Paraestas ultimas funciones, una prueba analıtica de este hecho es muy simple,por ejemplo, si k ∈ C, la funcion z → kz transforma la recta
z = a+ bt, a, b ∈ C, t ∈ R,
en la rectaw = kz = ka+ k b t, t ∈ R,
y el cırculo|z − a| = r,
en el cırculo|kz − ka| = kr.
El caso de la traslacion es tambien trivial (ejercicio).Para mostrar que la transformacion z → 1/z tiene dicha propiedad,
usamos la ecuacion general del “cırculo”
A(x2 + y2) +Bx+ Cy = D. (1.4)
Escribiendo z = x+ iy y 1/z = u+ iv, como
u =x
x2 + y2, v =
−yx2 + y2
y u2 + v2 =1
x2 + y2,
sustituyendo en 1.4 se obtienen la ecuaciones
A( 1
u2 + v2
)+B
( u
u2 + v2
)+ C
( −vu2 + v2
)= D
y−D(u2 + v2) +Bu− Cv = −A,
18 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
que es de nuevo la ecuacion de un “cırculo”. Esto se sigue, ya que si D 6= 0,se puede completar cuadrados y obtener la ecuacion de un cırculo (no hayradios negativos, ya que se trata de la imagen de un “cırculo”).
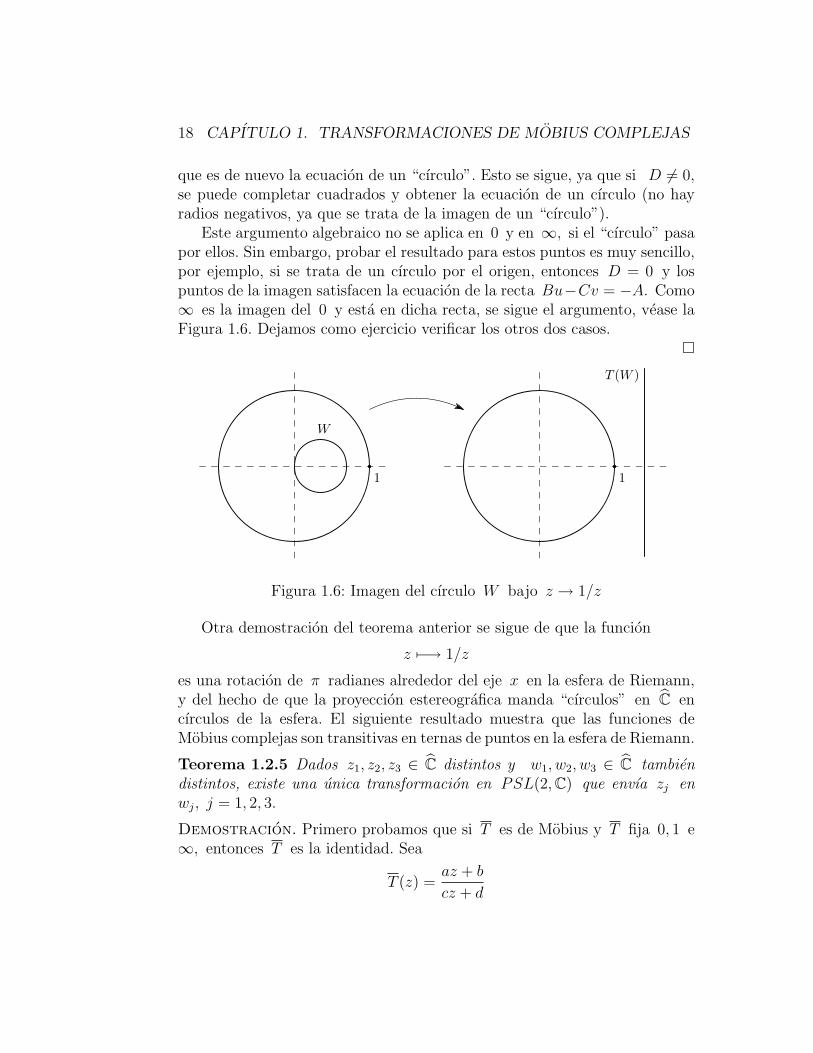
Este argumento algebraico no se aplica en 0 y en ∞, si el “cırculo” pasapor ellos. Sin embargo, probar el resultado para estos puntos es muy sencillo,por ejemplo, si se trata de un cırculo por el origen, entonces D = 0 y lospuntos de la imagen satisfacen la ecuacion de la recta Bu−Cv = −A. Como∞ es la imagen del 0 y esta en dicha recta, se sigue el argumento, vease laFigura 1.6. Dejamos como ejercicio verificar los otros dos casos.
�
W
1 1
T (W )
Figura 1.6: Imagen del cırculo W bajo z → 1/z
Otra demostracion del teorema anterior se sigue de que la funcion
z 7−→ 1/z
es una rotacion de π radianes alrededor del eje x en la esfera de Riemann,y del hecho de que la proyeccion estereografica manda “cırculos” en C encırculos de la esfera. El siguiente resultado muestra que las funciones deMobius complejas son transitivas en ternas de puntos en la esfera de Riemann.
Teorema 1.2.5 Dados z1, z2, z3 ∈ C distintos y w1, w2, w3 ∈ C tambiendistintos, existe una unica transformacion en PSL(2,C) que envıa zj enwj, j = 1, 2, 3.
Demostracion. Primero probamos que si T es de Mobius y T fija 0, 1 e∞, entonces T es la identidad. Sea
T (z) =az + b
cz + d

1.2. PROPIEDADES BASICAS 19
con dicha propiedad, como T (0) = b/d y T (∞) = a/c, se tiene b, c = 0,por lo que T (1) = a/d = 1 y a = d. En consecuencia, T (z) = z ∀z.
Ahora, si z1, z2, z3 ∈ C, la transformacion
S1(z) =
(z1 − z3
z1 − z2
) (z − z2
z − z3
)es de Mobius y envıa z1, z2, z3 en 1, 0, e ∞, respectivamente. Para adaptaresta formula al caso en que alguno de los puntos sea ∞, simplemente seomiten los dos factores donde aparece este punto, por ejemplo, si z2 = ∞,la transformacion
S1(z) =z1 − z3
z − z3
tiene la propiedad deseada. Dejamos como ejercicio para el lector verificarlos otros dos casos.
El mismo argumento muestra la existencia de una transformacion deMobius S2 que manda w1, w2, w3 en 1, 0, e ∞ y por lo tanto la trans-formacion
S−1
2 S1 ∈ PSL(2,C)
manda zj en wj, j = 1, 2, 3.La unicidad se sigue ya que si T 1 y T 2 envıan zj en wj, j = 1, 2, 3, se
tieneS2 T 1 S
−1
1 = S2 T 2 S−1
1
(puesto que ambas funciones son la identidad), por lo que T 1 = T 2. �
z1
z2
z3
w1
w2
w3
T
Figura 1.7: Transitividad de PSL(2,C) en “cırculos”
Este teorema y los resultados anteriores implican que las transformacionesde Mobius actuan transitivamente en la familia de todos los “cırculos” de laesfera de Riemann. Esta util y fundamental propiedad se generaliza tambiena cualquier dimension (cf. [2] p. 31).
20 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
Corolario 1.2.6 Dados dos “cırculos” A y B en C, existe T ∈ PSL(2,C),tal que T (A) = B, es decir, este grupo actua transitivamente en los “cırcu-
los” de C.
Demostracion. El “cırculo” A esta determinado por tres puntos distintos,digamos z1, z2, z3, asimismo el “cırculo” B esta determinado por otros trespuntos distintos w1, w2, w3. Se sigue entonces del teorema anterior que existeT ∈ PSL(2,C), tal que T (zi) = wi ∀i y el resultado es consecuencia delhecho de que las transformaciones de Mobius mandan “cırculos” en “cırculos”(vease la Figura 1.7).
EJERCICIOS 1.2
1. Sea T (z) = az+bcz+d
, tal que ad− bc = 0, demuestre que T es constante.
2. Demuestre que el centro de SL(2,Z) es ±Id. Sugerencia: usar las matrices( 1 1
0 1 ) , ( 1 01 1 ) .
3. Termine la prueba de la Proposicion 1.2.1.
4. Termine la prueba de la Proposicion 1.2.2.
5. Demuestre que la transformacion z → 1/z es una rotacion en la esfera deRiemann de π radianes alrededor del eje x.
6. Sea T (z) = az+bcz+d
de Mobius, demuestre que T tiene un polo simple en−d/c, si c 6= 0, y en ∞, si c = 0.
7. Sea f una funcion entera en C, tal que f(∞) = ∞, demuestre que fes un polinomio.
8. Demuestre que las traslaciones preservan la familia de cırculos y la familiade rectas.
9. Termine las pruebas de los Teoremas 1.2.4 y 1.2.5.
1.3. Clasificacion por conjugacion
Una primera clasificacion de las transformaciones de Mobius se obtiene alconsiderar los puntos fijos en C. Observese primero que si T es de Mobiusy no es la identidad, entonces T fija a lo mas dos puntos. Esto se sigue ya

1.3. CLASIFICACION POR CONJUGACION 21
que si T (∞) 6= ∞, entonces
T (z) =az + b
cz + d= z ⇐⇒ az + b = cz2 + dz
y si ∞ es un punto fijo, la ecuacion
a
dz +
b
d= z
tiene a lo mas una solucion.
Definicion 4 Sea T de Mobius, tal que fija exactamente un punto en C,entonces a T se le llama parabolica.
Lema 1.3.1 Sean T y ϕ transformaciones de Mobius, entonces T fija a unpunto w en C (o preserva un subconjunto A ⊂ C) si y solo si S = ϕT ϕ−1
fija ϕ(w) (o preserva ϕ(A)).
Demostracion.
T (w) = w ⇐⇒ ϕT (w) = ϕ(w) ⇐⇒ ϕT ϕ−1 (ϕ(w)) = ϕ(w).
Esta misma demostracion prueba la afirmacion del lema sobre un conjuntoA preservado por T . �
Observese que el lema anterior tambien se aplica en otras dimensiones yen contextos mas generales.
Proposicion 1.3.2 Sea T una transformacion de Mobius. Entonces:
(i) si T es parabolica, T es conjugada en PSL(2,C) a una traslacion;
(ii) si T no es parabolica, T es conjugada en PSL(2,C) a una transfor-macion de la forma z → αz, α ∈ C.
Demostracion. Sea T parabolica con punto fijo z0 y ϕ ∈ PSL(2,C) talque ϕ(z0) = ∞, por ejemplo,
ϕ(z) =1
z − z0
,

22 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
entonces S = ϕT ϕ−1 fija ∞, y por lo tanto es de la forma
S(z) = αz + β.
Se sigue del lema anterior que S no tiene otro punto fijo, por lo cual α = 1(si α 6= 1, la ecuacion αz + β = z tendrıa una solucion finita).
Para probar la segunda parte, supongamos que T fija 2 puntos distintosw1, w2 y que
ϕ(z) =z − w1
z − w2
(si w2 = ∞, se toma ϕ(z) = z − w1). Bajo estas hipotesis la funcion
S = ϕT ϕ−1
fija 0 e ∞, por lo cual si
S(z) =az + b
cz + d,
se tiene b, c = 0. �
El resultado anterior muestra que cualquier transformacion de Mobius esconjugada a una transformacion canonica. El siguiente resultado examina laconjugacion entre estas transformaciones canonicas.
Proposicion 1.3.3 Sean k1, k2 complejos no nulos, supongase tambien quek1 6= k2, k
−12 , entonces las transformaciones T (z) = k1z y S(z) = k2z no
son conjugadas en PSL(2,C).
Demostracion. Si la transformacion ϕ ∈ PSL(2,C) conjuga T y S,digamos S = ϕT ϕ−1, entonces se sigue del Lema 1.3.1 que ϕ preserva{0,∞}.
Si ϕ fija 0 e ∞, entonces ϕ es de la forma z → αz, α ∈ C, por lo queϕ conmuta con T , pero entonces T = S, lo cual contradice las hipotesis.
Por otra parte, si ϕ(0) = ∞ y ϕ(∞) = 0, escribiendo
ϕ(z) =az + b
cz + d,
como ϕ(0) = b/d y ϕ(∞) = a/c, se tiene que a, d = 0 y que
ϕ(z) =b
cz.

1.4. GEOMETRIA 23
En este caso ϕ es una involucion, es decir, ϕ = ϕ−1 y
ϕT ϕ−1(z) = ϕT( b
cz
)= ϕ
(k1 b
cz
)=
b
c
(k1 b
cz
) =z
k1
,
lo cual contradice k2 6= 1/k1. �
Podemos ahora obtener una clasificacion de los elementos de PSL(2,C),en relacion a las transformaciones canonicas actuando en la esfera de Rie-mann.
Definicion 5 Sea T ∈ PSL(2,C), tal que T fija exactamente 2 puntos en
C, supongase tambien que T es conjugada en PSL(2,C) a la transforma-cion S(z) = αz. Entonces:
(i) si |α| = 1, a T se le llama elıptica;
(ii) si α ∈ R+, a T se le llama hiperbolica;
(iii) si |α| 6= 1 y α /∈ R+, a T se le llama loxodromica.
La proposicion anterior muestra que esta definicion no depende de latransformacion conjugante. Mas aun, la transformacion z → 1/z conjugalas transformaciones T 1(z) = αz y T 2(z) = z/α.
La definicion anterior no es usada de manera general en la literatura, al-gunos autores denominan a las transformaciones loxodromicas o hiperbolicas,simplemente hiperbolicas (cf. ([3] p. 31), otros autores en cambio, considerana las hiperbolicas como una subclase de las loxodromicas (cf. ([2] p. 67).
EJERCICIOS 1.3
1. Demuestre que si una funcion en PSL(2,C) es de orden finito, entonceses necesariamente elıptica.
2. Demuestre que cualquier traslacion z → z + b, b ∈ C, es conjugada enPSL(2,C) a la traslacion z → z + 1.
1.4. Geometrıa
Para visualizar la accion geometrica de las transformaciones de Mobius en laesfera de Riemann y en el plano complejo, es util considerar ciertas familias
24 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
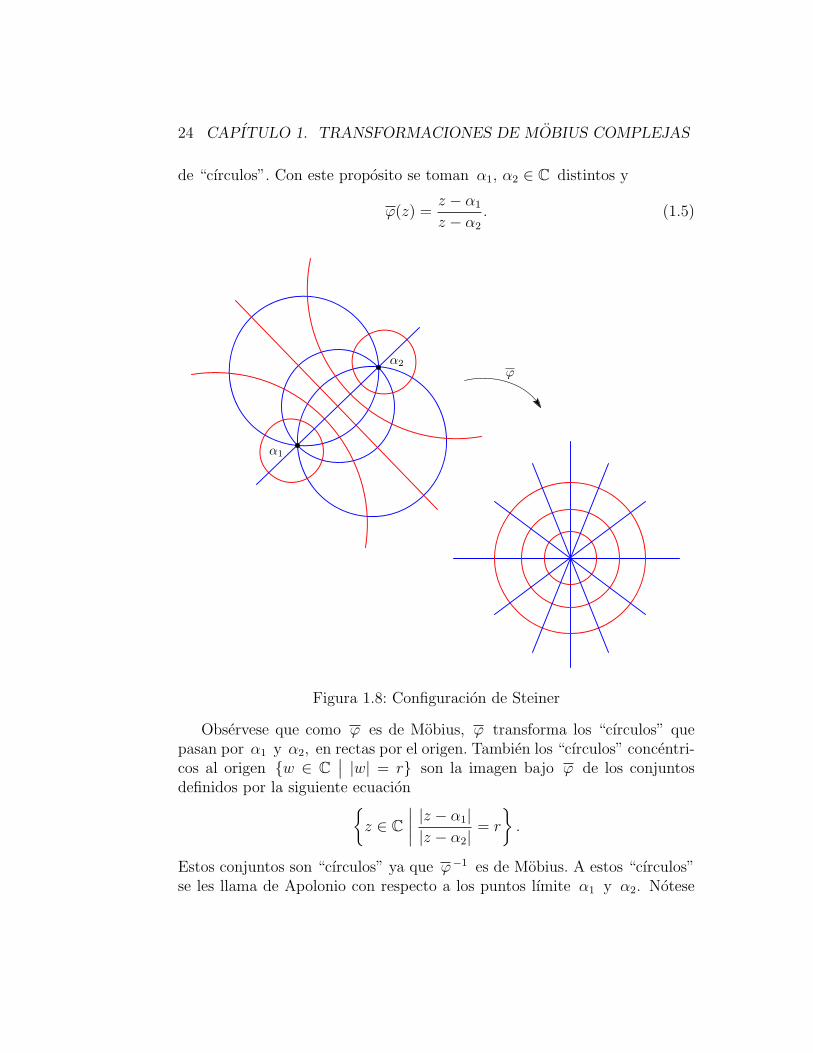
de “cırculos”. Con este proposito se toman α1, α2 ∈ C distintos y
ϕ(z) =z − α1
z − α2
. (1.5)
α1
α2
ϕ
Figura 1.8: Configuracion de Steiner
Observese que como ϕ es de Mobius, ϕ transforma los “cırculos” quepasan por α1 y α2, en rectas por el origen. Tambien los “cırculos” concentri-cos al origen {w ∈ C
∣∣ |w| = r} son la imagen bajo ϕ de los conjuntosdefinidos por la siguiente ecuacion{
z ∈ C∣∣∣∣ |z − α1||z − α2|
= r
}.
Estos conjuntos son “cırculos” ya que ϕ−1 es de Mobius. A estos “cırculos”se les llama de Apolonio con respecto a los puntos lımite α1 y α2. Notese
1.4. GEOMETRIA 25
que estos “cırculos” estan caracterizados por la propiedad de ser el conjuntode puntos del plano cuyas distancias a dos puntos fijos tienen una razonconstante. No es difıcil probar analıtica y geometricamente que para un solovalor de r, el “cırculo” de Apolonio es una recta (ejercicio) .
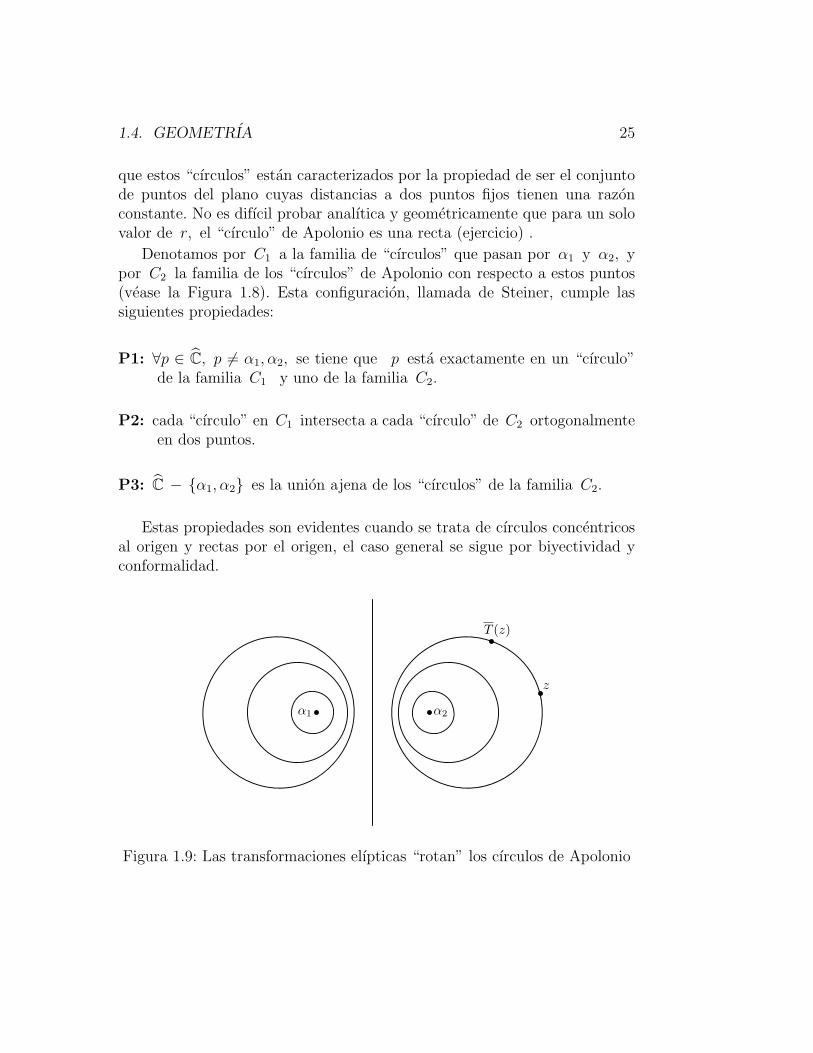
Denotamos por C1 a la familia de “cırculos” que pasan por α1 y α2, ypor C2 la familia de los “cırculos” de Apolonio con respecto a estos puntos(vease la Figura 1.8). Esta configuracion, llamada de Steiner, cumple lassiguientes propiedades:
P1: ∀p ∈ C, p 6= α1, α2, se tiene que p esta exactamente en un “cırculo”de la familia C1 y uno de la familia C2.
P2: cada “cırculo” en C1 intersecta a cada “cırculo” de C2 ortogonalmenteen dos puntos.
P3: C − {α1, α2} es la union ajena de los “cırculos” de la familia C2.
Estas propiedades son evidentes cuando se trata de cırculos concentricosal origen y rectas por el origen, el caso general se sigue por biyectividad yconformalidad.
z
T (z)
α1 α2
Figura 1.9: Las transformaciones elıpticas “rotan” los cırculos de Apolonio
26 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
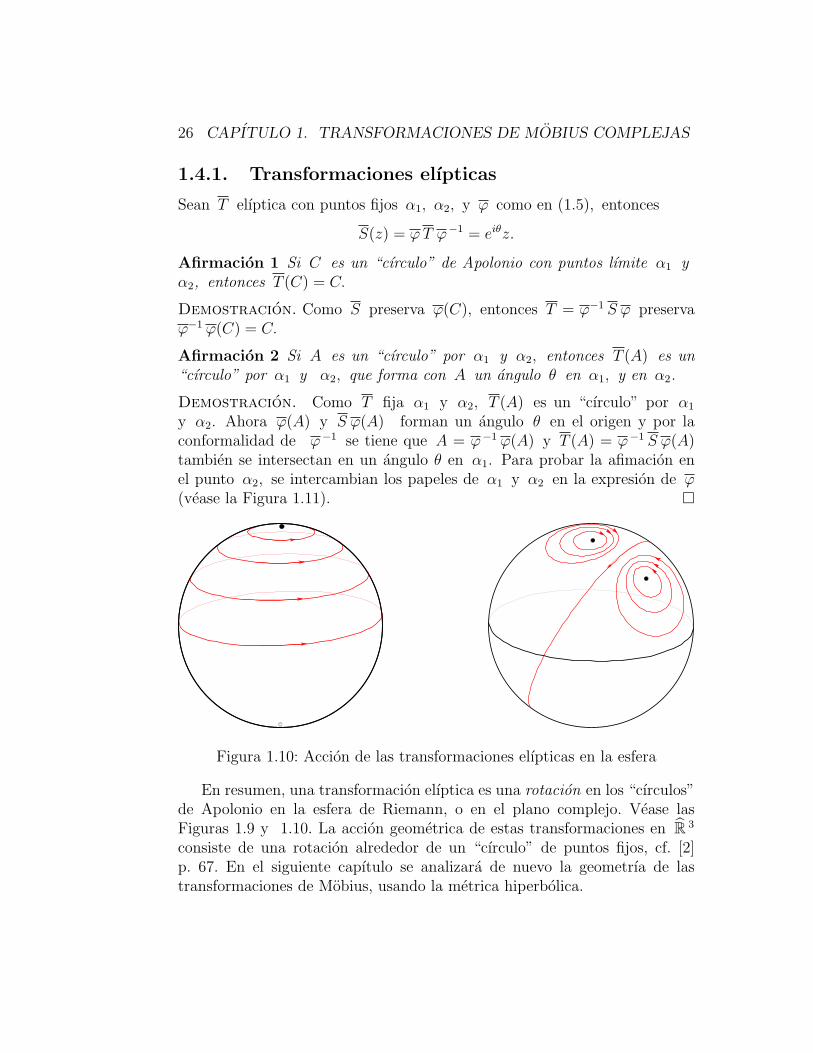
1.4.1. Transformaciones elıpticas
Sean T elıptica con puntos fijos α1, α2, y ϕ como en (1.5), entonces
S(z) = ϕT ϕ−1 = eiθz.
Afirmacion 1 Si C es un “cırculo” de Apolonio con puntos lımite α1 yα2, entonces T (C) = C.
Demostracion. Como S preserva ϕ(C), entonces T = ϕ−1 S ϕ preservaϕ−1 ϕ(C) = C.
Afirmacion 2 Si A es un “cırculo” por α1 y α2, entonces T (A) es un“cırculo” por α1 y α2, que forma con A un angulo θ en α1, y en α2.
Demostracion. Como T fija α1 y α2, T (A) es un “cırculo” por α1
y α2. Ahora ϕ(A) y S ϕ(A) forman un angulo θ en el origen y por laconformalidad de ϕ−1 se tiene que A = ϕ−1 ϕ(A) y T (A) = ϕ−1 S ϕ(A)tambien se intersectan en un angulo θ en α1. Para probar la afimacion enel punto α2, se intercambian los papeles de α1 y α2 en la expresion de ϕ(vease la Figura 1.11). �
Figura 1.10: Accion de las transformaciones elıpticas en la esfera
En resumen, una transformacion elıptica es una rotacion en los “cırculos”de Apolonio en la esfera de Riemann, o en el plano complejo. Vease lasFiguras 1.9 y 1.10. La accion geometrica de estas transformaciones en R 3
consiste de una rotacion alrededor de un “cırculo” de puntos fijos, cf. [2]p. 67. En el siguiente capıtulo se analizara de nuevo la geometrıa de lastransformaciones de Mobius, usando la metrica hiperbolica.
1.4. GEOMETRIA 27
θ
Sϕ(A)
ϕ(A)
A
T (A)
α1 α2
θ θ
Figura 1.11: Las transformaciones elıpticas intercambian los “cırculos” porlos puntos fijos (rotandolos)
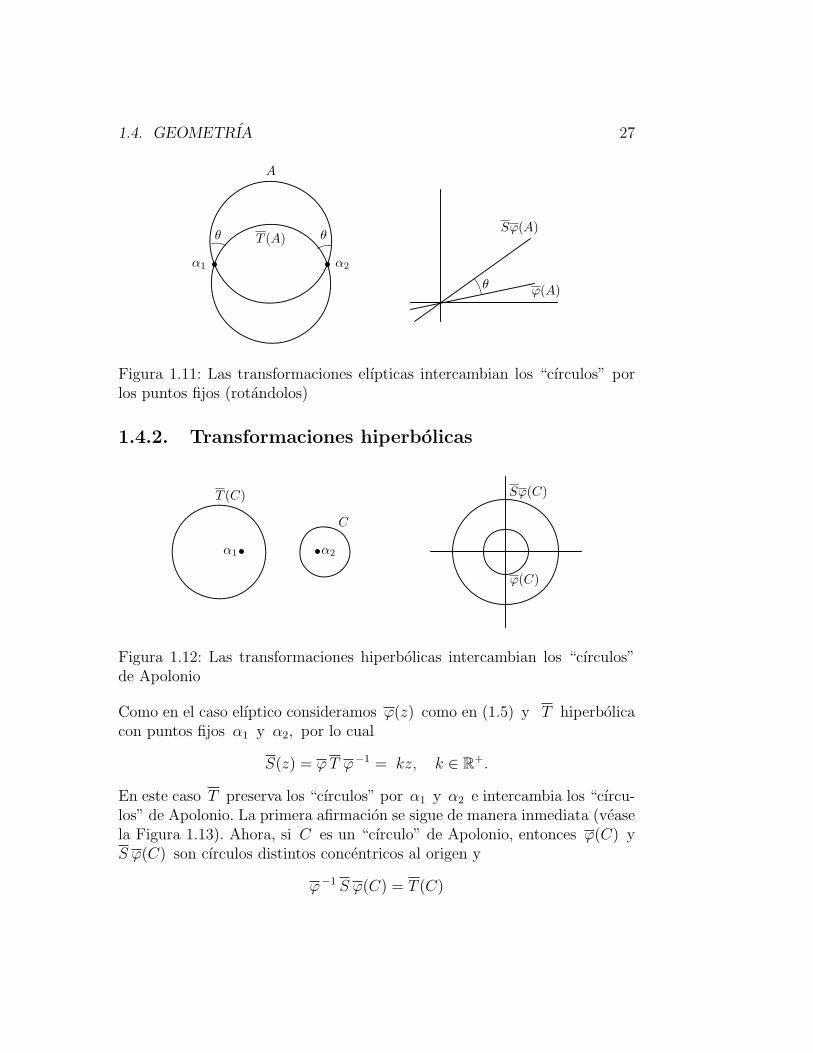
1.4.2. Transformaciones hiperbolicas
α1 α2
C
T (C)
ϕ(C)
Sϕ(C)
Figura 1.12: Las transformaciones hiperbolicas intercambian los “cırculos”de Apolonio
Como en el caso elıptico consideramos ϕ(z) como en (1.5) y T hiperbolicacon puntos fijos α1 y α2, por lo cual
S(z) = ϕT ϕ−1 = kz, k ∈ R+.
En este caso T preserva los “cırculos” por α1 y α2 e intercambia los “cırcu-los” de Apolonio. La primera afirmacion se sigue de manera inmediata (veasela Figura 1.13). Ahora, si C es un “cırculo” de Apolonio, entonces ϕ(C) yS ϕ(C) son cırculos distintos concentricos al origen y
ϕ−1 S ϕ(C) = T (C)
28 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
es otro “cırculo” de Apolonio (vease la Figura 1.12).
α1 α2
z
T (z)
Tn
(z)
z
T (z)
Tn
(z)
Figura 1.13: “Cırculos” fijos de las transformaciones hiperbolicas
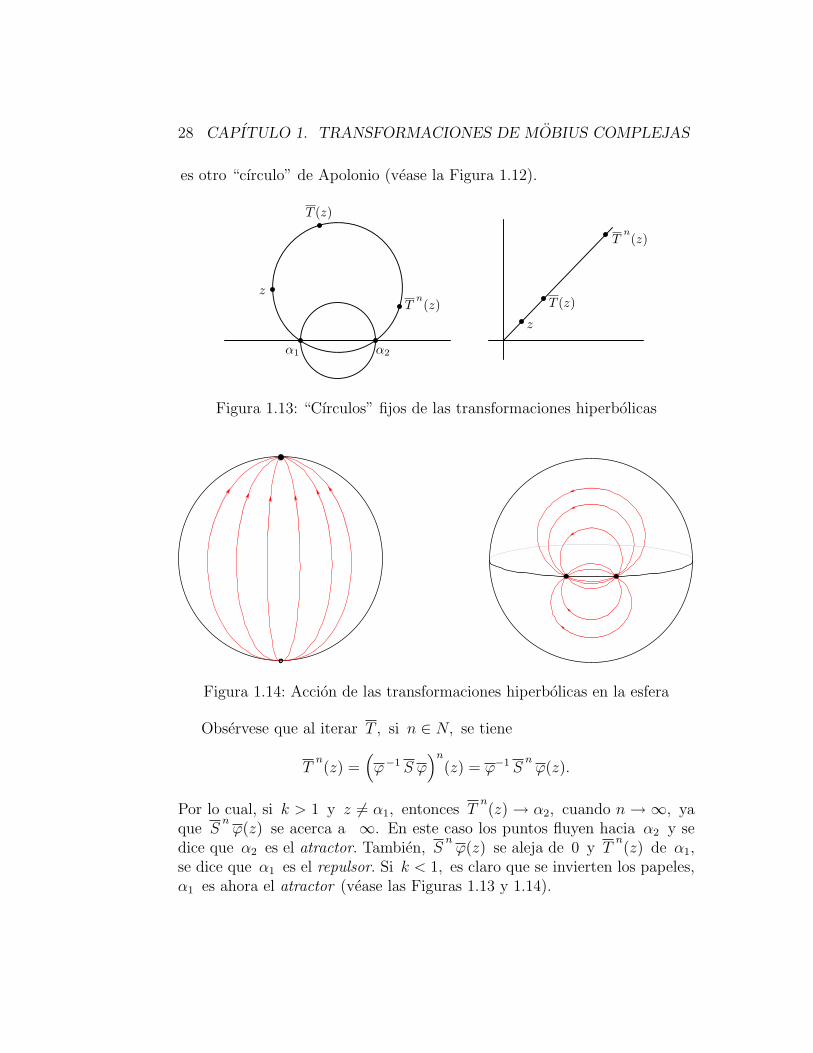
Figura 1.14: Accion de las transformaciones hiperbolicas en la esfera
Observese que al iterar T , si n ∈ N, se tiene
Tn(z) =
(ϕ−1 S ϕ
)n(z) = ϕ−1 S
nϕ(z).
Por lo cual, si k > 1 y z 6= α1, entonces Tn(z) → α2, cuando n → ∞, ya
que Snϕ(z) se acerca a ∞. En este caso los puntos fluyen hacia α2 y se
dice que α2 es el atractor. Tambien, Snϕ(z) se aleja de 0 y T
n(z) de α1,
se dice que α1 es el repulsor. Si k < 1, es claro que se invierten los papeles,α1 es ahora el atractor (vease las Figuras 1.13 y 1.14).
1.4. GEOMETRIA 29
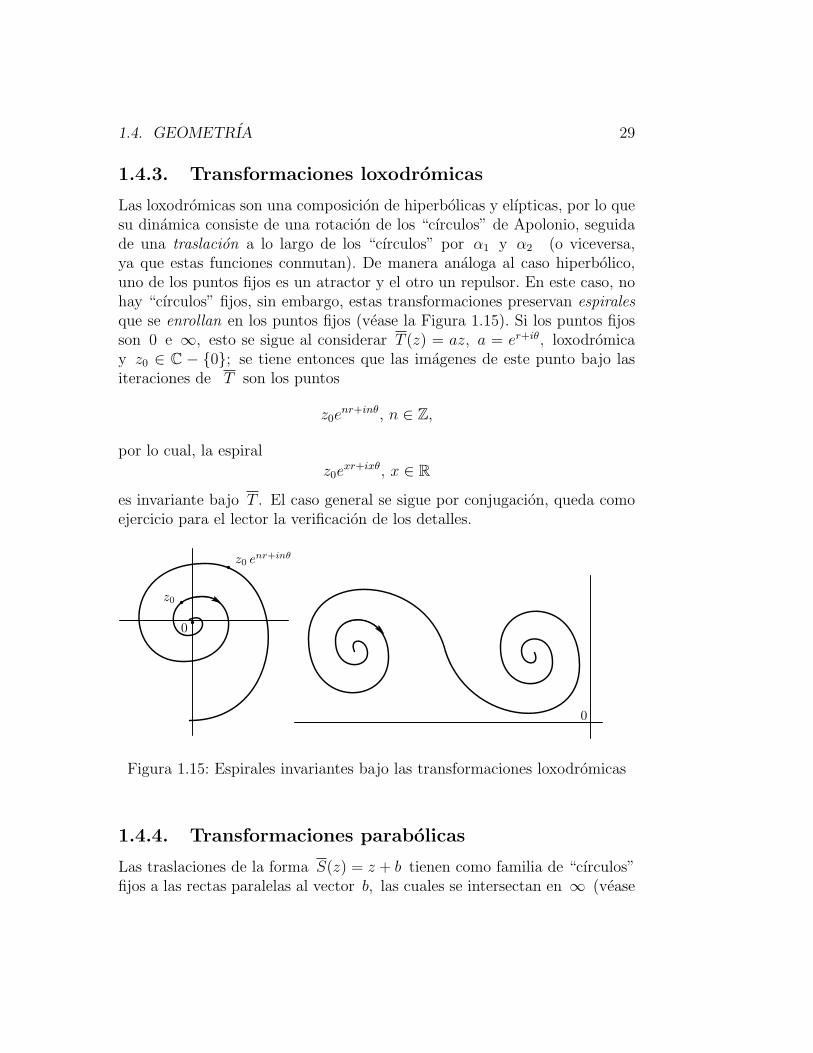
1.4.3. Transformaciones loxodromicas
Las loxodromicas son una composicion de hiperbolicas y elıpticas, por lo quesu dinamica consiste de una rotacion de los “cırculos” de Apolonio, seguidade una traslacion a lo largo de los “cırculos” por α1 y α2 (o viceversa,ya que estas funciones conmutan). De manera analoga al caso hiperbolico,uno de los puntos fijos es un atractor y el otro un repulsor. En este caso, nohay “cırculos” fijos, sin embargo, estas transformaciones preservan espiralesque se enrollan en los puntos fijos (vease la Figura 1.15). Si los puntos fijosson 0 e ∞, esto se sigue al considerar T (z) = az, a = er+iθ, loxodromicay z0 ∈ C − {0}; se tiene entonces que las imagenes de este punto bajo lasiteraciones de T son los puntos
z0enr+inθ, n ∈ Z,
por lo cual, la espiral
z0exr+ixθ, x ∈ R
es invariante bajo T . El caso general se sigue por conjugacion, queda comoejercicio para el lector la verificacion de los detalles.
0
z0
z0 enr+inθ
0
Figura 1.15: Espirales invariantes bajo las transformaciones loxodromicas
1.4.4. Transformaciones parabolicas
Las traslaciones de la forma S(z) = z + b tienen como familia de “cırculos”fijos a las rectas paralelas al vector b, las cuales se intersectan en ∞ (vease

30 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
la Figura 1.16). Al iterar S los puntos de C se mueven hacia ∞ en ladireccion del vector b.
En el caso general, si T es parabolica y fija α, conjugando con
ϕ(z) =1
z − α,
se tiene que la familia de “cırculos” fijos cubren C y se intersectan solamenteen α. Al iterar T algunos puntos fluyen a lo largo de estos “cırculos” hacia α,otros se “alejan” de este punto, para posteriormente “acercarse” a el (veaselas Figuras 1.16 y 1.17). Estas afirmaciones se pueden probar de maneraanaloga a las del caso hiperbolico.
z + b
z
α
Figura 1.16: Cırculos fijos de las transformaciones parabolicas
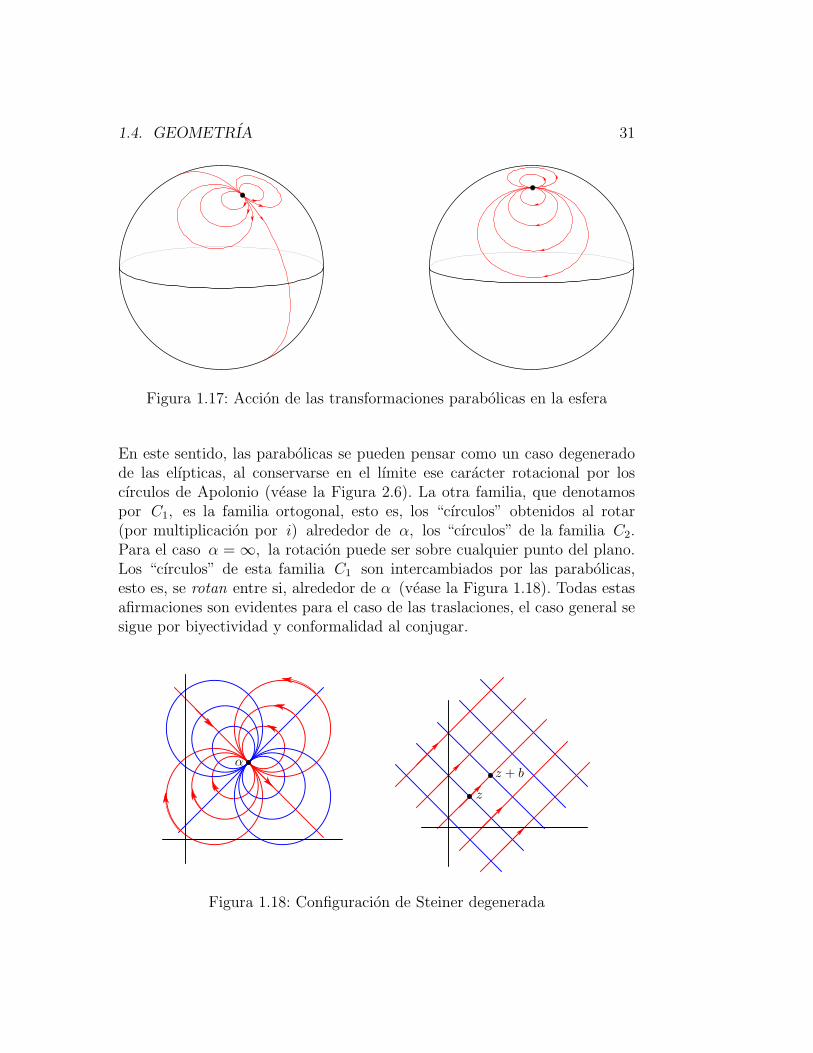
La configuracion de los “cırculos” fijos de las parabolicas descrita en laFigura 1.16 se enriquece al incorporar su familia ortogonal, como se muestraen la Figura 1.18. Esta nueva configuracion describe de manera mas detalladala geometrıa de las transformaciones parabolicas y se puede pensar como uncaso degenerado de la configuracion de Steiner, que se obtiene al juntar los dospuntos lımite α1, α2, en uno solo, que es precisamente el punto α. La familiade los “cırculos” fijos, la denotamos por C2, como ya se menciono consistede “cırculos” tangentes en α, que cubren la esfera de Riemann, es decir,si F1, F2 ∈ C2, entonces F1 ∩ F2 = {α}. Esta familia se puede pensar comoun caso degenerado de los “cırculos” de Apolonio que originalmente rodeanlos puntos lımite α1, α2, y que al deformar estos en un solo punto α, setransforman en “cırculos” tangentes en α, que cubren la esfera de Riemann.
1.4. GEOMETRIA 31
Figura 1.17: Accion de las transformaciones parabolicas en la esfera
En este sentido, las parabolicas se pueden pensar como un caso degeneradode las elıpticas, al conservarse en el lımite ese caracter rotacional por loscırculos de Apolonio (vease la Figura 2.6). La otra familia, que denotamospor C1, es la familia ortogonal, esto es, los “cırculos” obtenidos al rotar(por multiplicacion por i) alrededor de α, los “cırculos” de la familia C2.Para el caso α = ∞, la rotacion puede ser sobre cualquier punto del plano.Los “cırculos” de esta familia C1 son intercambiados por las parabolicas,esto es, se rotan entre si, alrededor de α (vease la Figura 1.18). Todas estasafirmaciones son evidentes para el caso de las traslaciones, el caso general sesigue por biyectividad y conformalidad al conjugar.
α
z
z + b
Figura 1.18: Configuracion de Steiner degenerada
32 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
EJERCICIOS 1.4
1. Demuestre analitica y geometricamente que existe solamente una recta deApolonio.
2. Demuestre la existencia de espirales invariantes bajo las transformacionesloxodromicas.
3. Demuestre que una transformacion loxodromica tiene como puntos fijosun atractor y un repulsor.
1.5. Transformaciones que preservan “dis-
cos”
Se denotara por “discos” a discos o semiplanos en el plano complejo (o discosen la esfera de Riemann). Se describe primero las transformaciones de Mobiusque preservan el semiplano superior,
H2 = {z ∈ C∣∣ Im(z) > 0}.
Mostraremos en el siguiente capıtulo que este semiplano es uno de los mode-los mas importantes del plano hiperbolico y que las transformaciones dePSL(2,C) que lo preservan, actuan como isometrıas hiperbolicas.
Al subgrupo de las matrices en SL(2,C) con entradas reales se le denotapor SL(2,R). La misma prueba del caso complejo muestra que el centro deSL(2,R) es ±Id y que se puede identificar a las transformaciones de Mobiusdefinidas por estas matrices con PSL(2,R), donde este ultimo grupo es elcociente de SL(2,R) sobre su centro. Esta afirmacion se sigue del siguientediagrama de sucesiones exactas, donde µR denota las transformaciones deMobius definidas por las matrices en SL(2,R).
±Id � SL(2,R) � PSL(2,R).�
µR 'De ahora en adelante nos referiremos a estas transformaciones como los
elementos de PSL(2,R).
Teorema 1.5.1 Las transformaciones de Mobius que preservan H2 son pre-cisamente aquellas definidas por PSL(2,R).

1.5. TRANSFORMACIONES QUE PRESERVAN “DISCOS” 33
Demostracion. Sea
T (z) =az + b
cz + d, ab− bc = 1, a, b, c, d ∈ R,
se sigue entonces que T (R) = R. Ahora, como
T (i) =a i+ b
c i+ d=
(a i+ b)(−c i+ d)
c 2 + d 2,
se tiene que
Im(T (i)) =1
c 2 + d 2> 0,
y se sigue entonces por conexidad que T preserva H2.Por otra parte, si una funcion en PSL(2,C)
T (z) =az + b
cz + d, ad− bc = 1,
preserva H2, entonces la continuidad y la biyectividad implican que T tam-bien preserva la recta real extendida R.
Ahora, si
S(z) =az + b
cz + d,
resulta que T y S coinciden en R, ya que si z ∈ R, entonces
T (z) = T (z) = S(z) = S(z).
Por lo tanto, como T y S coinciden en mas de dos puntos, T = S y
a = ± a, b = ± b, c = ± c, d = ± d.
Hay que probar que a, b, c y d no son imaginarios puros, si ası fuera, setendrıa
T (i) =a i+ b
c i+ d=
(a i+ b)(−c i+ d)
|c i+ d|2y
Im T (i) =a d− b c
|c i+ d|2= − a d− b c
|c i+ d|2< 0,
lo cual contradice que T preserva H2. �

34 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
Se quiere describir las transformaciones de Mobius que preservan el discounitario
∆ = {z ∈ C | |z| < 1}.Esto es muy importante, porque este disco, llamado de Poincare, es un segun-do modelo del plano hiperbolico, mas homogeneo que el semiplano superior,ya que todos los puntos en la “recta” al infinito, es decir, en el cırculo uni-tario, son similares; en contraste con la recta real extendida, en la cual ∞juega un papel muy particular. Con este objeto, se encuentra una funcion enPSL(2,C) que transforme H2 en ∆. Para esto basta mandar tres puntosdistintos de la recta real extendida, a tres puntos distintos del cırculo unitario∂∆. Una eleccion, que resulta muy adecuada, es enviar −1, 0, 1 a i,−1,−i.
Si T ∈ PSL(2, C),
T (z) =az + b
cz + d,
tiene esta propiedad, evaluando en 0, se tiene
b/d = −1 y b = −d.
Evaluando ahora en ±1, se sigue que
−a+ b
−c+ d= i y
a+ b
c+ d= −i.
Por consiguiente
−a− d = i(−c+ d) y a− d = −i(c+ d),
sumando y restando estas ecuaciones se obtiene
− 2 d = −2 i c y − 2 a = 2 i d.
Finalmente, si d = i se obtiene la transformacion buscada
T (z) =z − i
z + i,
ya que como T (i) = 0 y por construccion T manda la recta real en el cırculounitario, se sigue por conexidad que
T (H2) = ∆.
Esta transformacion llamada de Cayley es una rotacion de orden 3 en laesfera de Riemann (cf. [16]).

1.5. TRANSFORMACIONES QUE PRESERVAN “DISCOS” 35
Teorema 1.5.2 Las transformaciones de Mobius en PSL(2,C) que preser-van el disco unitario ∆ son de la forma
S(z) =αz + β
βz + α, |α|2 − |β|2 = 1 α, β ∈ C.
Demostracion. Observese primero que si
T (z) =z − i
z + i
y S es una funcion en PSL(2,C) que preserva ∆, entonces la transforma-cion
U = T−1S T ∈ PSL(2,R)
y
S = T U T−1.
Escribiendo
T =
(1 −i1 i
)y U =
(a bc d
)∈ SL(2,R),
basta calcular T U T −1.Como
T−1 =
(i/2 i i/2 i−1/2 i 1/2 i
)= (1/2) I
(1 1i −i
),
se tiene
T U T −1 = (1/2) I
(1 −i1 i
) (a bc d
) (1 1i −i
)= (1/2) I
(a− ic b− ida+ ic b+ id
) (1 1i −i
)= (1/2) I
(a+ d+ i(b− c) a− d− i(b+ c)a− d+ i(b+ c) a+ d+ i(c− b)
),
la cual es una matriz de la forma(α β
β α
), |α|2 − |β|2 = 1, α, β ∈ C.
�

36 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
Denotaremos por M(∆) a este subgrupo de transformaciones de PSL(2,C)que preservan ∆. La funcion
z 7−→ az + c
cz + a, |a|2 − |c|2 = 1,
se puede modificar a otra util expresion, de la siguiente manera:
az + c
cz + a=
a
(z +
c
a
)cz + a
=
a
|a|
(z +
c
a
)c
|a|z +
a
|a|
=
(a
|a|
)2 (z −
(− ca
))ac
|a|2z +
aa
|a|2
=e iθ(z − z0)
−z0z + 1, z0 ∈ ∆, (1.6)
donde e iθ = (a/|a|)2 y z0 = −c/a (como |a|2 − |c|2 = 1, z0 ∈ ∆).
Viceversa, se sigue por biyectividad y conexidad, que toda transformacionde la forma (1.6) preserva ∆, ya que T (z0) = 0 y si |z| = 1, entonces
|z − z0|| − z0z + 1|
=|zz − z0z|| − z0z + 1|
= 1.
Las transformaciones de Mobius que preservan ∆ son conformes en ∆,ya que los unicos puntos donde una funcion en PSL(2,C) puede no serconforme son ∞ y su preimagen.
EJERCICIOS 1.5
1. Sea f : ∆ → ∆ una biyeccion conforme, demuestre que f es de Mobius.Sugerencia: usar la unicidad del teorema del “mapeo” de Riemann.
2. Demuestre que PSL(2,R) esta generado por homotecias, traslaciones porreales y la funcion z → −1/z.

1.6. CLASIFICACION POR LA TRAZA 37
1.6. Clasificacion por la traza
Ahora exhibimos una caracterizacion de los elementos de PSL(2,C) enterminos de la traza, esta clasificacion es de gran utilidad, por ejemplo, per-mite detectar de manera inmediata de que tipo es una transformacion deMobius dada.
Definicion 6 Sea T una transformacion de Mobius distinta de la identidad.
(i) Si T es parabolica se define su multiplicador como 1.
(ii) Si T es conjugada a una transformacion de la forma z → kz, k 6= 0, 1,a los numeros k y 1/k se les llama los multiplicadores de T .
Se sigue de la clasificacion definida por la conjugacion a formas canonicasque los multiplicadores estan bien definidos. El grupo de matrices de 2 × 2con entradas complejas y determinante distinto de 0 se denota por GL(2,C),se define la traza de A ∈ GL(2,C) como la suma de los elementos diagonales,esta se denota por tr(A). Usaremos el siguiente resultado basico del algebralineal.
Lema 1.6.1 La traza es invariante bajo conjugacion en GL(2,C).
Demostracion. Basta probar que tr(AB) = tr(BA), A,B ∈ GL(2,C), yaque entonces tr(ABA−1) = tr(A−1AB) = tr(B). Escribiendo
A =
(a bc d
), B =
(α βγ δ
),
se tiene
AB =
(aα+ bγ ∗
? cβ + dδ
)y BA =
(αa+ βc ∗
? γb+ δd
),
por lo que tr(AB) = tr(BA). �
La traza de una transformacion de Mobius esta bien definida salvo unsigno, puesto que existen dos matrices unimodulares que la definen.
Definicion 7 Dada T ∈ PSL(2,C),
T (z) =az + b
cz + d,
se define la traza de T como ± a+ d√ad− bc
.

38 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
Denotaremos la traza de T por χ(T ), o simplemente por χ. Para muchasaplicaciones es util tener formulas explıcitas de las coordenadas de los puntosfijos. Obtenemos ahora una expresion en terminos de la traza, para estoconsideramos
T (z) =az + b
cz + d, ad− bc = 1, T 6= Id
y se tienen dos casos.
Caso 1: c 6= 0. En este caso, como
T (z) = z ⇐⇒ az + b = (cz + d) z ⇐⇒ cz2 + (d− a)z − b = 0,
los puntos fijos de T estan dados por
a− d±√
(a− d)2 + 4 b c
2c,
y usando la condicion unimodular, esta formula se simplifica a
a− d±√χ2 − 4
2c. (1.7)
Caso 2: c = 0. En este caso
T (z) =a
dz +
b
d.
Si T es parabolica, ∞ es el unico punto fijo. De otra manera, como
T (z) = z ⇐⇒(ad− 1
)z = − b
d,
el segundo punto fijo esta dado por
b
d− a.
Teorema 1.6.2 Sea T ∈ PSL(2,C), T 6= Id, entonces
k +1
k+ 2 = χ2,
donde k, 1/k son los multiplicadores de T y χ es su traza.

1.6. CLASIFICACION POR LA TRAZA 39
Demostracion.Caso 1: T es parabolica.
Como el cuadrado de la traza es invariante bajo conjugacion, se tiene
χ2(T ) = tr2
(1 t0 1
)= 4
y se sigue el resultado.
Caso 2: T no es parabolica.En este caso T es conjugada a una transformacion de la forma S(z) = kz,la cual esta definida por la matriz
S =
√k 0
01√k
∈ SL(2,C).
Por lo cual
χ2(T ) = χ2(S) =(√
k +1√k
)2
= k +1
k+ 2.
�
Para transformaciones con dos puntos fijos finitos α1, α2, se tiene unaexpresion de los multiplicadores en terminos de estos puntos. Sea
T (z) =az + b
cz + d
con esta propiedad, S(z) = kz, donde k es uno de los multiplicadores de Ty
ϕ(z) =z − α1
z − α2
.
Entonces,S = ϕT ϕ−1 y S ϕ = ϕT .
Por lo cualT (z)− α1
T (z)− α2
= kz − α1
z − α2
,
y evaluando en ∞, se tiene
k =a/c− α1
a/c− α2
y 1/k =a/c− α2
a/c− α1
.

40 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
Para el caso de una transformacion en PSL(2,C) que fija dos puntos,uno de los cuales es ∞, es decir, de la forma T (z) = α z + β, los multi-plicadores se encuentran con facilidad, estos son precisamente α y 1/α. Locual se sigue, ya que con esta notacion el segundo punto fijo esta dado por
β
1− α,
y conjugando con
ϕ(z) = z − β
1− α,
se obtiene
S(z) = ϕT ϕ−1(z) = ϕT
(z +
β
1− α
)= α z
(como el termino constante es cero, no es necesario efectuar mas cuentas).Esta facilidad para detectar los multiplicadores de una transformacion
que fija ∞, permite tambien clasificarla de manera inmediata, por ejemplo,
z → i z + 5
es elıptica, sin embargoz → 7 z + 8 + i
es hiperbolica. El siguiente resultado es muy importante, exhibe un criterio,tambien sencillo, para clasificar cualquier transformacion en PSL(2,C).
Teorema 1.6.3 Sea T ∈ PSL(2,C), T 6= Id y χ la traza de T . Entonces
(i) T es parabolica si y solo si χ = ±2;
(ii) T es eliptıca si y solo si χ ∈ (−2, 2);
(iii) T es hiperbolica si y solo si χ ∈ (2,∞) ∪ (−∞,−2);
(iv) T es loxodromica si y solo si χ /∈ R.
Demostracion. Probamos primero las condiciones de necesidad. El casoparabolico ya se probo.
Si T es elıptica, entonces T es conjugada a una transformacion de laforma S(z) = e iθ z, θ ∈ (0, 2π), la cual esta determinada por la matriz(
eiθ/2 00 e−iθ/2
)∈ SL(2, C).

1.6. CLASIFICACION POR LA TRAZA 41
Por lo tanto, ±χ(T ) = ±χ(S) = ± 2 cos(θ/2) ∈ (−2, 2).
Si T es hiperbolica, entonces T es conjugada a una transformacion defini-da por la matriz (√
k 0
0 1/√k
)∈ SL(2, C), k ∈ R+,
por lo cual
χ2(T ) = χ2(S) =
(√k +
1√k
)2
= k + 2 +1
k> 4,
puesto que (√k − 1√
k
)2
> 0.
Ahora, si T es loxodromica y ρe iθ, ρ 6= 0, 1, θ ∈ (0, 2π), es uno de susmultiplicadores, se sigue del Teorema 1.6.2 que
ρ(cos θ + i sen θ) +1
ρ(cos θ − i sen θ) + 2 = χ2(T ).
Si χ(T ) ∈ R, se tendrıa χ2(T ) ∈ R+ y (ρ − 1/ρ) sen θ = 0, por lo cualsen θ = 0 y θ = π. Al tomar la parte real se tiene −(ρ+ 1/ρ) + 2 ∈ R+, loque es una contradiccion, ya que ρ+ 1/ρ > 2.
Para probar la suficiencia, observese que si χ2(T ) = 4, se sigue de laprimera parte que T no es elıptica, ni tampoco hiperbolica o loxodromica,por lo que debe ser parabolica. Los otros casos se siguen de manera analoga.
�
El siguiente resultado, que es consecuencia del Teorema 1.6.2, muestraque χ2 clasifica las clases conjugadas de PSL(2,C); dejamos su verificacioncomo ejercicio para el lector.
Corolario 1.6.4 Dos transformaciones de Mobius complejas T , S son con-jugadas en PSL(2,C) si y solo si
χ2(T ) = χ2(S).

42 CAPITULO 1. TRANSFORMACIONES DE MOBIUS COMPLEJAS
Damos ahora unos ejemplos, las transformaciones
z 7−→ 2 z + 3
z + 2y z 7−→ 2 z + 9
−z − 4
son hiperbolica y parabolica, respectivamente. Por otra parte, las funciones
z 7−→ −1
zy z 7−→ i z − 2
z + i z
son elıptica de orden 2 y loxodromica, respectivamente.
EJERCICIOS 1.6
1. Sea T ∈ PSL(2,C), demuestre que T preserva un “disco” si y solo si Tno es loxodromica.
2. Demuestre que una transformacion en PSL(2,C) es de orden dos si y solosi su traza es 0.
3. Demuestre que los puntos fijos de una transformacion elıptica en PSL(2,R)son conjugados.
4. Demuestre que los puntos fijos finitos de una transformacion hiperbolicao parabolica en PSL(2,R) son reales.
5. Demuestre que la funcion z → z−iz+i
es elıptica de orden 3.
6. Demuestre el Corolario 1.6.4.
Capıtulo 2
Metrica hiperbolica
Primeramente se demuestra como una densidad induce una metrica y comobajo biyecciones conformes se obtienen isometrıas. Usando estos resultadosse presentan dos modelos del plano hiperbolico, el del semiplano superior H2
y el del disco de Poincare ∆. En cada uno de estos modelos, se describenformulas de la distancia, ası como los grupos de isometrıas, las geodesicaso curvas que minimizan la distancia y los cırculos. Tambien, se muestranalgunas aplicaciones, como el paralelismo. Posteriormente, se estudia el grupogeneral de isometrıas en ambos modelos y se describen los haces parabolicos,elıpticos e hiperbolicos, probando algunas propiedades de estos. Por ultimo,se prueban algunos resultados de la geometrıa hiperbolica 3-dimensional.
2.1. Densidades
Recordamos que si A es un abierto en Rn y f es una funcion diferenciablede A en Rn, se dice que f es conforme en x0 ∈ A, si Df(x0) es el productode una matriz ortogonal por la matriz k I, k ∈ R+. Al numero k se le llamael factor de conformalidad y se le denota por µf (x0), o simplemente porµ(x0).
Definicion 8 Sea A una region en Rn, una densidad en A es una funcioncontinua λ : A→ R+.
Las densidades nos permiten medir longitudes de curvas de distintasmaneras. Mas precisamente, dada una densidad λ en una region A y γ
43
44 CAPITULO 2. METRICA HIPERBOLICA
una curva de clase C 1 en A, se define la λ-longitud de γ como∫ b
a
λ(γ(t)) | γ ′(t) | dt,
donde γ:[a , b]→ A. Esta definicion se extiende de manera natural a curvas declase C 1 por tramos. Denotamos a esta longitud por lλ(γ). Esta medicionde curvas permite tambien medir la distancia entre puntos.
Definicion 9 Sea λ una densidad en una region A y z1, z2 ∈ A, se definela λ-distancia de z1 a z2, como
ınfγlλ(γ),
donde el ınfimo es sobre todas las curvas γ de clase C1 por tramos que unenz1 con z2. A esta distancia se le denota por ρλ(z1, z2).
Teorema 2.1.1 Sea λ una densidad definida en una region A de Rn, en-tonces la distancia ρλ define una metrica en A.
Demostracion. Probamos primero que ρ es simetrica. Para esto, si setiene una curva γ : [a , b] → A de clase C 1 que une z1 con z2, se define−γ : [a , b] → A como −γ(t) = γ(a+ b− t). Observese que −γ une z2 conz1, y que usando el teorema fundamental del calculo se tiene
lλ(−γ) =
∫ b
a
λ(− γ(t)
)|(−γ) ′(t)| dt =
∫ b
a
λ(γ(a+ b− t)
)| γ ′(a+ b− t)| dt
=
∫ b
a
λ(γ(s)
)|γ′(s)| ds = lλ(γ).
Evidentemente, ρ(x, x) = 0, ∀x ∈ A y ρ es no negativa. Ademas, secumple la desigualdad del triangulo: si ρ(x, z) > ρ(x,w) + ρ(w, z), entoncesexiste ε > 0, tal que ρ(x, z) > ρ(x,w) + ρ(w, z) + ε. Sin embargo, en estecaso se podrıan tomar dos curvas, γ1 y γ2, cuyas longitudes aproximaranρ(x,w) y ρ(w, z) por una cantidad menor a ε/2 , respectivamente. Esto serıauna contradiccion, ya que la curva γ1 +γ2 unirıa x con z y tendrıa longitudmenor a ρ(x, z).
Falta solamente probar que si x 6= y, entonces ρ(x, y) > 0. Para probaresto, sea D un disco cerrado con centro en x, radio r y tal que y /∈ D. Por
2.1. DENSIDADES 45
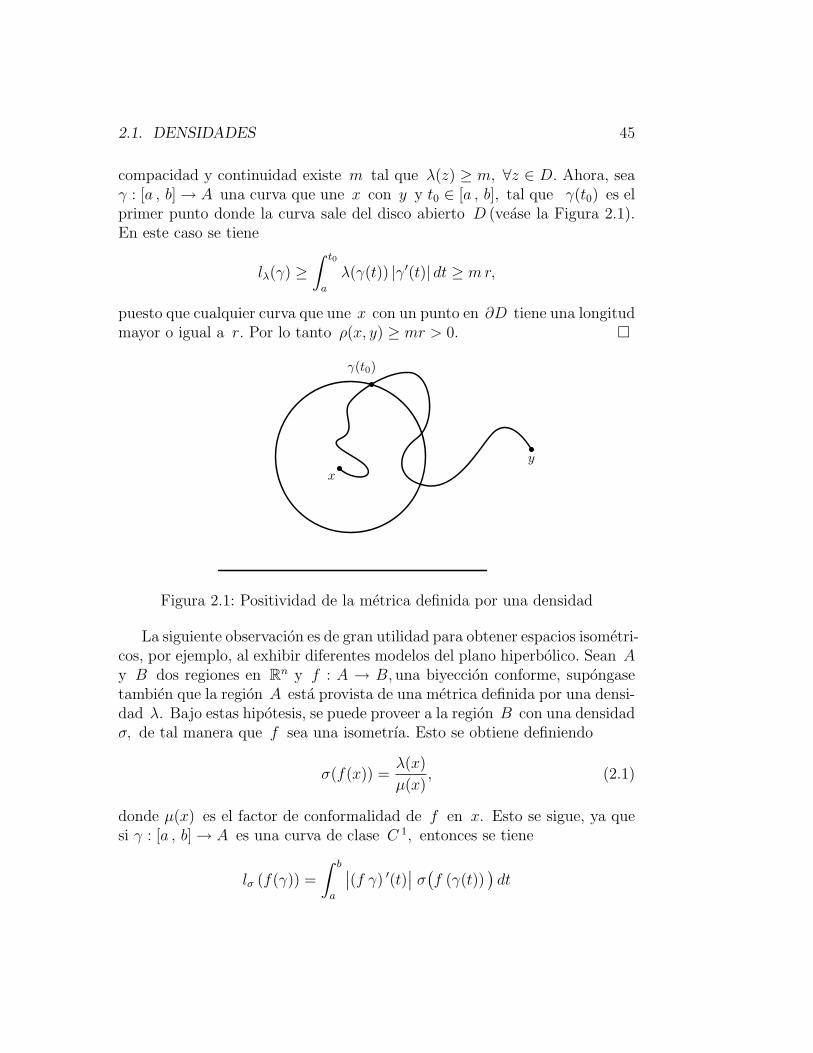
compacidad y continuidad existe m tal que λ(z) ≥ m, ∀z ∈ D. Ahora, seaγ : [a , b] → A una curva que une x con y y t0 ∈ [a , b], tal que γ(t0) es elprimer punto donde la curva sale del disco abierto D (vease la Figura 2.1).En este caso se tiene
lλ(γ) ≥∫ t0
a
λ(γ(t)) |γ′(t)| dt ≥ mr,
puesto que cualquier curva que une x con un punto en ∂D tiene una longitudmayor o igual a r. Por lo tanto ρ(x, y) ≥ mr > 0. �
x
y
γ(t0)
Figura 2.1: Positividad de la metrica definida por una densidad
La siguiente observacion es de gran utilidad para obtener espacios isometri-cos, por ejemplo, al exhibir diferentes modelos del plano hiperbolico. Sean Ay B dos regiones en Rn y f : A → B, una biyeccion conforme, supongasetambien que la region A esta provista de una metrica definida por una densi-dad λ. Bajo estas hipotesis, se puede proveer a la region B con una densidadσ, de tal manera que f sea una isometrıa. Esto se obtiene definiendo
σ(f(x)) =λ(x)
µ(x), (2.1)
donde µ(x) es el factor de conformalidad de f en x. Esto se sigue, ya quesi γ : [a , b] → A es una curva de clase C 1, entonces se tiene
lσ (f(γ)) =
∫ b
a
∣∣(f γ) ′(t)∣∣ σ(f (γ(t))
)dt
46 CAPITULO 2. METRICA HIPERBOLICA
=
∫ b
a
µ(γ(t)) |γ′(t)| λ (γ(t))
µ(γ(t))dt = lλ(γ).
Como toda curva de clase en C 1 en B es de esta forma, se sigue la obser-vacion, puesto que este analisis se puede generalizar facilmente a curvas declase C 1 por tramos.
Es importante destacar que el argumento funciona tambien en el sentidoinverso, es decir, si se tienen dos regiones A y B con metricas definidas pordensidades λ y σ respectivamente y una biyeccion conforme entre ellas quesatisface (2.1), entonces A y B son regiones isometricas.
En particular, si se tiene una region A en Rn provista con una metricadefinida por una densidad λ y una biyeccion conforme f : A → A, quesatisface la ecuacion
λ(f(x)) =λ(x)
µ(x), (2.2)
entonces, f es una isometrıa.Si se tiene definida una densidad λ, en una region A ⊂ Rn, es claro
que la λ-longitud de una curva C en A no esta unıvocamente determina-da, ya que al parametrizarla se puede hacer de tal manera que se recorraalgun segmento de la curva, mas de una vez. Sin embargo, si la curva Cesta parametrizada por una funcion C 1 por tramos, de modo que la deriva-da se anule solamente en un numero finito de puntos y recorra la curva enla misma direccion; entonces la λ-longitud de C es unica. Para probar es-to, observese primero que se tienen dos parametrizaciones γ1 : [a , b] → A,γ2 : [c , d] → A, de clase C 1, que recorren el mismo segmento de la curva C,en la misma direccion y con derivada no nula, entonces se sigue del teoremade parametrizacion unitaria, que existe un difeomorfismo ϕ : [a , b] → [c , d],tal que γ2 ϕ = γ1. Ahora, bajo estas hipotesis, se tiene por el teorema decambio de variable real, que
lλ(γ1) = lλ(γ2 ϕ) =
∫ b
a
∣∣(γ2 ϕ) ′(t)∣∣ λ(γ2
(ϕ(t)
))dt
=
∫ b
a
ϕ ′(t)∣∣γ2
′(ϕ(t))∣∣ λ(γ2
(ϕ(t)
))dt =
∫ d
c
∣∣γ2′(s)
∣∣ λ(γ2(s))ds = lλ(γ2).
Usando este argumento se sigue facilmente la afirmacion en el caso general.
EJERCICIOS 2.1
1. Demuestre formalmente la existencia del punto t0 descrito al final de lademostracion del Teorema 2.1.1.

2.2. EL MODELO DEL SEMIPLANO 47
2. Demuestre formalmente la validez de la desigualdad descrita al final de lademostracion del Teorema 2.1.1:
∫ t0aλ(γ(t)) |γ′(t)| dt ≥ mr.
3. Sea f : A→ Rn una funcion diferenciable en una abierto A de Rn y quetambien es conforme en x0 ∈ A, demuestre que lımx→x0
|f(x)−f(x0)||x−x0| existe y
es precisamente el factor de conformalidad.
2.2. El modelo del semiplano
La discusion sobre densidades nos permite presentar un primer modelo delplano hiperbolico, donde PSL(2,R) actua como un grupo de isometrıas.
Definicion 10 El plano superior H2 provisto con la metrica definida porla densidad
λ(z) =1
Im zse le llama el plano hiperbolico y a esta metrica se le llama la metricahiperbolica.
En este modelo, llamado del semiplano, es intuitivamente claro que si setiene una curva C en H2 y se traslada en direccion vertical, su longitudhiperbolica puede crecer tanto como se quiera (si se mueve hacia abajo), opuede decrecer tanto como se quiera (si se mueve hacia arriba); sin embargola longitud euclideana siempre es la misma. Viceversa, existen curvas queeuclideanamente miden cualquier valor que se quiera, pero que hiperboli-camente siempre miden lo mismo, por ejemplo, los segmentos de cırculosconcentricos de la Figura 2.2. Esto se sigue del Teorema 2.2.1, ya que lashomotecias son isometrıas hiperbolicas, al estar definidas por matrices enSL(2,R).
Teorema 2.2.1 El grupo PSL(2,R) actua como un grupo de isometrıas enH2 con la metrica hiperbolica.
Demostracion. Observese primero que si
T (z) =az + b
cz + d
esta definida por la matriz (a bc d
)∈ SL(2, R),

48 CAPITULO 2. METRICA HIPERBOLICA
entonces
Im(T (z)
)= Im
(az + b
cz + d
)= Im
((az + b)(cz + d)
|cz + d|2
)
= Im
(adz + bcz
|cz + d|2
)=
Im(z)
|cz + d|2.
Tambien, como
T ′(z) =1
(cz + d)2,
se sigue de las ecuaciones de Cauchy-Riemann que
µT (z) =1
|cz + d|2.
Estos hechos muestran que se cumple la relacion (2.2), ya que
1
Im(T (z)
) =|cz + d|2
Im(z)=
1
Im(z)
(1
µT (z)
),
por lo que se sigue el resultado. �
0
Figura 2.2: Curvas de la misma longitud hiperbolica
Algunos ejemplos de isometrıas hiperbolicas son las traslaciones por realesy la funcion z → −1/z, esto se sigue ya que las matrices(
1 t0 1
),
(0 −11 0
), t ∈ R,

2.2. EL MODELO DEL SEMIPLANO 49
pertenecen a SL(2,R). Observese que esto implica que al trasladar cualquiercurva horizontalmente su longitud hiperbolica permanece invariante.
La reflexion en el eje imaginario
ϕ(z) = −z
es tambien una isometrıa hiperbolica de H2 (ejercicio). De hecho, probaremosque el grupo de todas las isometrıas hiperbolicas del modelo del semiplanosuperior esta generado por PSL(2,R) y ϕ.
Se establece ahora como son las curvas en el modelo del semiplano queminimizan la distancia. Para ello se considera primero una caso sencillo: setoman los puntos i, k i, k > 1 y γ : [a , b] → H2, de clase C 1, tal queγ(a) = i y γ(b) = k i. Si lh(γ) denota la longitud hiperbolica de γ yγ(t) = (γ1(t), γ2(t)), se tiene
lh(γ) =
∫ b
a
√(γ1
′(t))2 + (γ2′(t))2
γ2(t)dt
≥∫ b
a
√(γ2
′(t))2
γ2(t)dt ≥
∫ b
a
γ2′(t)
γ2(t)dt = log(γ2(t))
∣∣∣ba
= log γ2(b)− log γ(a) = log(k)− log(1) = log k.
En particular, la curva γ : [1 , k] → H2, dada por γ(t) = i t, alcanza estacota
lh(γ) =
∫ k
1
1
tdt = log k.
Como este argumento se generaliza facilmente a curvas de clase C 1 portramos, se sigue que
ρ(i, k i) = log k,
donde ρ denota la distancia hiperbolica. Se tiene tambien que este segmentodel eje imaginario es la unica curva que minimiza la distancia, ya que paracualquier otra curva con componente real y parametrizada por una funcionβ, se tiene lh(β) > log k (ejercicio).
Si 0 < k < 1, se aplican los mismos argumentos, considerando ahora quelas curvas inicien en k i y terminen en i, y que el dominio de la curva delongitud mınima sea el intervalo [k , 1], obteniendose como distancia − log k.
50 CAPITULO 2. METRICA HIPERBOLICA
Alternativamente, como la transformacion z → −1/z esta en PSL(2,R) yfija i, se sigue del caso anterior que
ρ(k i , i) = ρ(i/k , i) = log (1/k) = − log k.
Estos resultados implican tambien, que si t > m > 0, entonces
ρ(t i , m i) = log t− logm
(ejercicio).De manera analoga se puede definir un modelo del espacio hiperbolico
n-dimensional, usando el semiespacio superior en Rn
Hn = {(x1, x2, ..., xn) ∈ Rn | xn > 0} ,
con la densidad
λ(x) =1
xn,
donde x = (x1, x2, ..., xn). Resulta que una prueba, casi identica a la delcaso del semiplano superior, muestra que en este caso la longitud hiperbolicaentre puntos alineados verticalmente, es decir, con el eje definido por el vectoren = (0, ..., 0, 1) esta tambien dada por el logaritmo.
Volviendo al contexto bidimensional, se necesita otro resultado para anali-zar cuales son las curvas que minimizan la distancia hiperbolica entre dospuntos en H2, que no esten alineados verticalmente.
Proposicion 2.2.2 El grupo PSL(2,R) actua transitivamente en la familiade “cırculos” ortogonales al eje real.
Demostracion. Observese primero que por conformalidad cualquier trans-formacion en PSL(2,R) preserva esta familia. Ahora, para probar el teore-ma, basta mostrar que dado cualquier “cırculo” ortogonal al eje real C existeuna funcion en PSL(2,R) que transforma este cırculo en el eje imaginario.
Si C es una recta paralela al eje imaginario, una traslacion la mueve al ejeimaginario. Por otra parte, si C es un cırculo que intersecta ortogonalmenteal eje real, este se puede transformar mediante una traslacion y una homoteciaen el cırculo unitario, por lo que basta probar que existe un elemento enPSL(2,R) que transforme el cırculo unitario en el eje imaginario. Una opciones mandar 1 en 0 y −1 en ∞, lo cual sugiere tomar
z 7−→ z − 1
z + 1,

2.2. EL MODELO DEL SEMIPLANO 51
que es en efecto una transformacion en PSL(2,R) que transforma el cırculounitario en el eje imaginario. �
Notese, que la transformacion
z 7−→ z + 1
z − 1/∈ PSL(2,R),
por lo que es importante checar a nivel matricial las entradas, para detectarsi una transformacion pertenece, o no, a PSL(2,R). Observese tambien quela Proposicion 2.2.2 implica que PSL(2,R) es transitivo en puntos de H2
(evidentemente lo es para los puntos de R), ya que cualquier punto puedetrasladarse al eje imaginario, y posteriormente aplicando una homotecia man-darlo al punto i.
Se puede ahora caracterizar todas las curvas que minimizan distancias,que en este contexto se les llama tambien geodesicas. Sean z, w ∈ H2 y C el“cırculo” ortogonal a la recta real que pasa por z y w; se tiene entonces queρ(z, w) esta dada por la longitud hiperbolica del segmento de C que une zcon w (vease la Figura 2.3). Esto se sigue, ya que en virtud de la Proposi-cion 2.2.2, se puede encontrar una funcion en PSL(2,R) que transformeC en el eje imaginario, y estas transformaciones, ademas de ser isometrıas,tienen la propiedad de preservar curvas que minimizan la distancia (la ultimaafirmacion se sigue de la prueba del Teorema 2.2.1).
Este argumento demuestra ademas que el segmento de C, que denotare-mos por [z, w], es la unica curva que minimiza la distancia; esto se sigue,ya que si hubiera otra curva de z a w, con dicha propiedad, existirıa otrageodesica, distinta de un segmento vertical, uniendo a dos puntos en el ejeimaginario. Se concluye entonces que los “semicırculos” en H2, ortogonalesa la recta real, contienen todas las geodesicas hiperbolicas. Estos ultimosrazonamientos demuestran tambien el siguiente importante resultado.
Teorema 2.2.3 Sean z, w, v tres puntos distintos en H2, entonces
ρ(z, v) = ρ(z, w) + ρ(w, v) ⇐⇒ w ∈ [z, v].
Observese que el teorema anterior implica que cualquier isometrıa hiperbo-lica de H2 necesariamente manda geodesicas en geodesicas. Para obtener unaformula general de la distancia hiperbolica, entre dos puntos cualesquiera, seprueba primero el siguiente resultado de invariabilidad de cierta expresion,bajo la accion de elementos en PSL(2,R).

52 CAPITULO 2. METRICA HIPERBOLICA
i
ki
z wi
ki
z
w
Figura 2.3: Geodesicas en H2
Lema 2.2.4 La expresion|z − w|2
2 Im z Imw
es invariante bajo la accion de transformaciones en PSL(2,R).
Demostracion. Sea T ∈ PSL(2,R) dada por
T (z) =az + b
cz + d, ad− bc = 1,
se tiene entonces que|T (z)− T (w)|2
2 Im T (z) Im T (w)
=
∣∣∣∣az + b
cz + d− aw + b
cw + d
∣∣∣∣2 |cz + d|2|cw + d|2
2 Im z Im w
=|(az + b)(cw + d)− (aw + b)(cz + d)|2
2 Im z Im w=
|z − w|2
2 Im z Im w.
�
El lema anterior se puede generalizar a cualquier dimension, sustituyen-do la parte imaginaria por la enesima coordenada de un punto en Hn yreemplazando PSL(2,R) por el grupo de isometrıas (cf. [2] p. 34). Se puedeahora exhibir una formula general de la distancia hiperbolica en el modelodel semiplano; esta mostrara ser de gran utilidad, debido a sus multiplesaplicaciones.

2.2. EL MODELO DEL SEMIPLANO 53
Teorema 2.2.5 Sean z y w dos puntos en H2, entonces
cosh ρ(z, w) = 1 +|z − w|2
2 Im z Im w.
Demostracion. Si z = i y w = ki, k > 1, entonces
cosh ρ(i, k i) = cosh (log k) =k + 1/k
2
=k + 1/k − 2
2+ 1 =
(k − 1)2
2k+ 1
=|i− k i|2
2 Im i Im(k i)+ 1.
El caso general se sigue del lema anterior y de los Teoremas 2.2.2 y 2.2.1,ya que se puede encontrar una transformacion en PSL(2,R) que mande z yw en i y k i, k > 1. Esto ultimo se logra enviando la geodesica por z y wal eje imaginario, y posteriormente –si es necesario– aplicando una homoteciay la funcion z → −1/z. �
Se puede probar que la formula del teorema anterior es tambien validaen todas las dimensiones (vease [2] p. 35 y el final de este capıtulo).
z0
Figura 2.4: Cırculo hiperbolico con centro en z0
Una primera aplicacion de esta formula muestra que los cırculos hiperboli-cos son cırculos euclideanos, donde el centro euclideano se obtiene incremen-tando la parte imaginaria del centro hiperbolico (vease la Figura 2.4).

54 CAPITULO 2. METRICA HIPERBOLICA
Teorema 2.2.6 El conjunto de los puntos z = x + iy en H2, que equidis-tan hiperbolicamente una distancia r de un punto z0 = x0 + i y0, estandeterminados por la siguiente ecuacion
(x− x0)2 + (y − y0 cosh r)
2 = y20 senh
2 r,
es decir, constituyen un cırculo euclideano.
Demostracion. Sea C = {z ∈ H2 | ρ(z, z0) = r}, entonces
cosh ρ(z, z0) = cosh r = 1 +|z − z0|2
2 Im z Im z0
,
y se tiene
coshr =(x− x0)
2 + y2 + y20
2 y y0
.
Despejando y completando cuadrados se tiene
2 y y0 cosh r = (x− x0)2 + y2 + y2
0 (cosh2 r − senh2 r)
y(x− x0)
2 + (y − y0 cosh r)2 = y2
0 senh2 r.
�
Se ha probado entonces que el cırculo hiperbolico con centro z0 = x0+iy0
y radio hiperbolico r es el cırculo euclideano con centro en x0 + iy0 cosh r yradio y0 senh r (vease la Figura 2.4). De nuevo, esta formula de los cırculoshiperbolicos se generaliza a esferas hiperbolicas de cualquier dimension (cf.[2] p. 35). Mostramos ahora otra manera de probar que los cırculos hiperboli-cos son cırculos euclideanos. Sean z0 ∈ H2 y r ∈ R+, trazando cualquiergeodesica en H2 por el punto z0, se encuentra otro punto z ∈ H2, tal queρ(z, z0) = r. Ahora, si C denota el cırculo de Apolonio con respecto a z0 y
z0 que pasa por z, como R es tambien un “cırculo” de Apolonio con respec-to a estos puntos lımite, se tiene que cualquier transformacion elıptica, quefije z0 y z0, esta en PSL(2,R) y preserva C. En consecuencia, C consistede puntos que equidistan hiperbolicamente una distancia r de z0, esto sesigue ya que las transformaciones en PSL(2,R) son isometrıas. Finalmente,si ρ(z0, w) = r, al trazar la geodesica que une z0 con w, esta intersecta Cen 2 puntos y es claro que uno de ellos es w (vease la Figura 2.5).
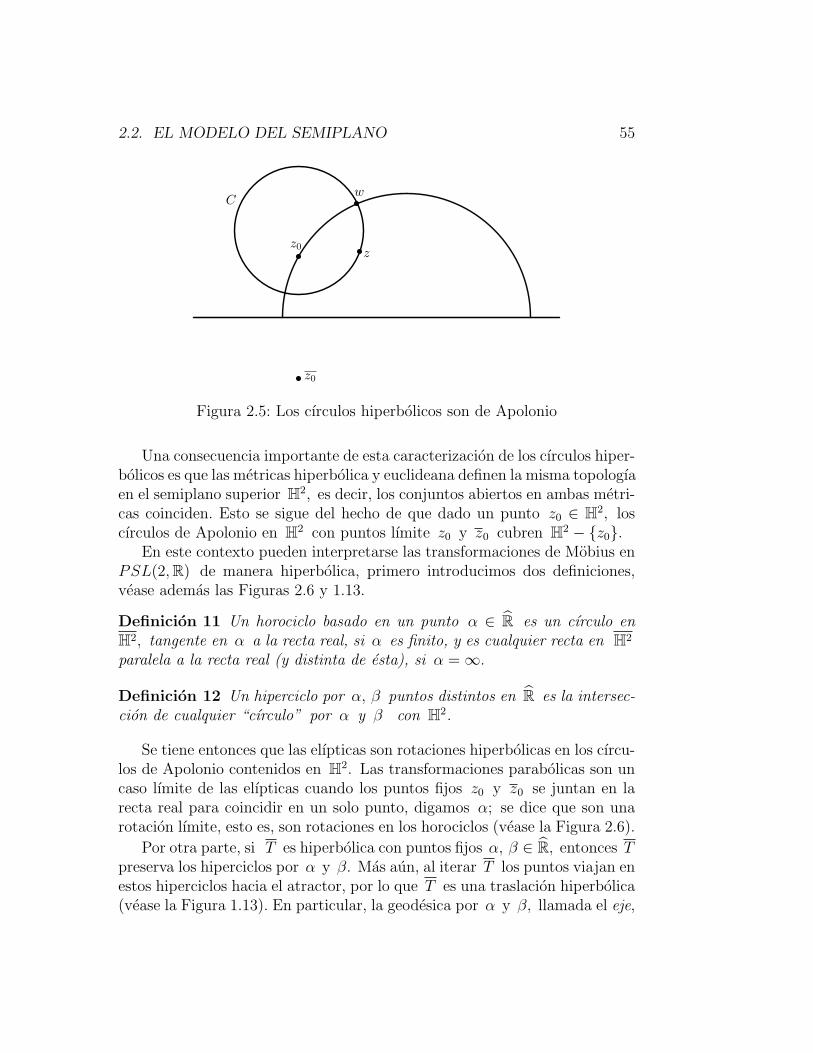
2.2. EL MODELO DEL SEMIPLANO 55
z0
z0
z
wC
Figura 2.5: Los cırculos hiperbolicos son de Apolonio
Una consecuencia importante de esta caracterizacion de los cırculos hiper-bolicos es que las metricas hiperbolica y euclideana definen la misma topologıaen el semiplano superior H2, es decir, los conjuntos abiertos en ambas metri-cas coinciden. Esto se sigue del hecho de que dado un punto z0 ∈ H2, loscırculos de Apolonio en H2 con puntos lımite z0 y z0 cubren H2 − {z0}.
En este contexto pueden interpretarse las transformaciones de Mobius enPSL(2,R) de manera hiperbolica, primero introducimos dos definiciones,vease ademas las Figuras 2.6 y 1.13.
Definicion 11 Un horociclo basado en un punto α ∈ R es un cırculo enH2, tangente en α a la recta real, si α es finito, y es cualquier recta en H2
paralela a la recta real (y distinta de esta), si α = ∞.
Definicion 12 Un hiperciclo por α, β puntos distintos en R es la intersec-cion de cualquier “cırculo” por α y β con H2.
Se tiene entonces que las elıpticas son rotaciones hiperbolicas en los cırcu-los de Apolonio contenidos en H2. Las transformaciones parabolicas son uncaso lımite de las elıpticas cuando los puntos fijos z0 y z0 se juntan en larecta real para coincidir en un solo punto, digamos α; se dice que son unarotacion lımite, esto es, son rotaciones en los horociclos (vease la Figura 2.6).
Por otra parte, si T es hiperbolica con puntos fijos α, β ∈ R, entonces Tpreserva los hiperciclos por α y β. Mas aun, al iterar T los puntos viajan enestos hiperciclos hacia el atractor, por lo que T es una traslacion hiperbolica(vease la Figura 1.13). En particular, la geodesica por α y β, llamada el eje,
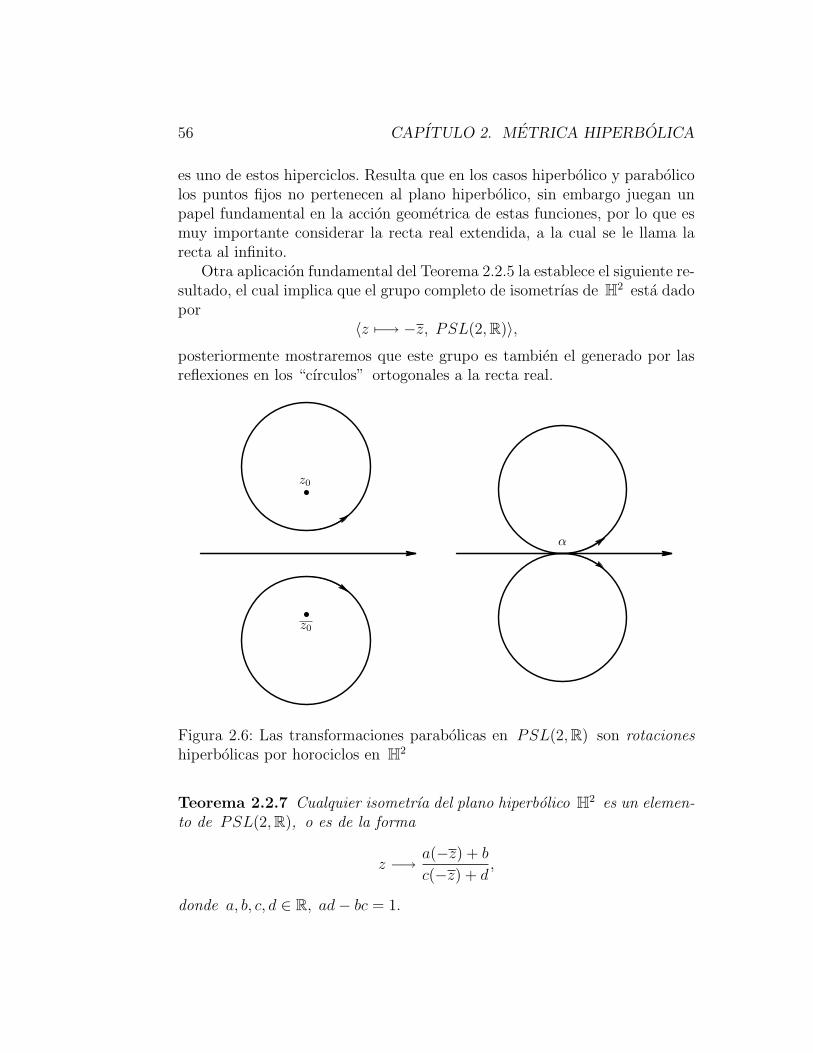
56 CAPITULO 2. METRICA HIPERBOLICA
es uno de estos hiperciclos. Resulta que en los casos hiperbolico y parabolicolos puntos fijos no pertenecen al plano hiperbolico, sin embargo juegan unpapel fundamental en la accion geometrica de estas funciones, por lo que esmuy importante considerar la recta real extendida, a la cual se le llama larecta al infinito.
Otra aplicacion fundamental del Teorema 2.2.5 la establece el siguiente re-sultado, el cual implica que el grupo completo de isometrıas de H2 esta dadopor
〈z 7−→ −z, PSL(2,R)〉,posteriormente mostraremos que este grupo es tambien el generado por lasreflexiones en los “cırculos” ortogonales a la recta real.
z0
z0
α
Figura 2.6: Las transformaciones parabolicas en PSL(2,R) son rotacioneshiperbolicas por horociclos en H2
Teorema 2.2.7 Cualquier isometrıa del plano hiperbolico H2 es un elemen-to de PSL(2,R), o es de la forma
z −→ a(−z) + b
c(−z) + d,
donde a, b, c, d ∈ R, ad− bc = 1.

2.2. EL MODELO DEL SEMIPLANO 57
Demostracion. Sea ϕ una isometrıa de H2 con la metrica hiperbolica.Usando los Teoremas 2.2.1, 2.2.3 y la Proposicion 2.2.2 (y si es necesarioaplicando una homotecia y la funcion z → −1/z), se puede suponer, sinperder generalidad, que existe T ∈ PSL(2,R), tal que la funcion T ϕ fijapuntualmente el eje imaginario positivo.
Ahora, sea z ∈ H2, z = x + iy y T ϕ(z) = a + ib, se sigue entonces delTeorema 2.2.5 que ∀ t ∈ R, t > 0, se tiene
|it− T ϕ (z)|2
2 Im (it) Im(T ϕ(z)
) =|it− z|2
2 Im (it) Im z,
por lo cuala2 + (b− t)2
b=
x2 + (y − t)2
yy
y(a2 + (b− t)2
)= b
(x2 + (y − t)2
).
Haciendo t tender a ∞, en esta ultima ecuacion, se obtiene
b = y y a = ±x.
Finalmente, como las isometrıas son evidentemente continuas, se tieneque los puntos en el primer cuadrante, donde T ϕ es la funcion z → −z(o la identidad), es un conjunto abierto y cerrado (este argumento se aplicatambien al segundo cuadrante). Se sigue entonces por conexidad, y del hechode que cualquier isometrıa es inyectiva, que
T ϕ = Id o T ϕ (z) = −z.
�
Una caracterizacion del grupo completo de isometrıas en el espacio hiperbo-lico n-dimensional aparece en [20], pp. 129 y 130. Una version mas geometrica,que sin embargo asume diferenciabilidad, se puede consultar en [14] p. 61.Estas generalizaciones muestran que –como en el caso bidimensional– estegrupo esta generado por las reflexiones en “esferas” ortogonales a Rn−1. Elsiguiente resultado muestra que la distancia de un punto a una geodesica sealcanza trazando otra geodesica ortogonal.
Lema 2.2.8 Sea λ una geodesica en H2 y z ∈ H2 − λ, entonces ρ(z, λ)se alcanza en z0 ∈ λ, donde el segmento [z, z0] corta ortogonalmente a λ.

58 CAPITULO 2. METRICA HIPERBOLICA
z
i |z|
λ
Figura 2.7: Distancia de un punto a una geodesica
Demostracion. Sin perder generalidad, se puede suponer que λ es el ejeimaginario, se afirma que ρ(z, λ) = ρ(z, i|z|) (vease la Figura 2.7). Usandola formula de la distancia hiperbolica, si z = x+ iy, se tiene
coshρ(z, it) = 1 +|z − it|2
2(Im z)t=
x2 + y2 + t2
2yt
=|z|2 + t2
2yt=
|z|2y
(|z|t
+t
|z|
)≥ |z|
y
(puesto que ∀ x ∈ R+, x+ 1/x ≥ 2). La igualdad se obtiene si t = |z|. �
Se deduce de la formula de la distancia hiperbolica una interesante propie-dad que cumplen todos los triangulos hiperbolicos en el semiplano superior –oen el disco de Poincare– que tienen un angulo recto y dos puntos finitos. Estapropiedad establece que la longitud hiperbolica del lado finito esta determi-nada por el angulo de magnitud distinta de 0 y de π/2. Explıcitamente,como PSL(2,R) es transitivo en geodesicas, se puede tomar el triangulodeterminado por ∞, i|z| y z; si el angulo en z es α, se tiene
sen α cosh ρ(z, i|z|) = 1
(vease la Figura 2.8). A esta propiedad se le conoce como angulo de paralelis-mo, queda como ejercicio para el lector probar dicha identidad.
EJERCICIOS 2.2
1. Demuestre formalmente que si se tiene una curva C 1 por tramos que unei con k i, k > 1, y que no esta contenida en el segmento vertical [i , k i],entonces su longitud hiperbolica es estrictamente mayor que log k.

2.3. EL MODELO DEL DISCO DE POINCARE 59
2. Pruebe que z → −z es una isometrıa hiperbolica de H2.
3. Demuestre que si t > m > 0, entonces ρ(t i , m i) = log t− logm.
4. Demuestre formalmente el Teorema 2.2.3.
5. Demuestre que dado un triangulo hiperbolico en H2 con un vertice enla recta al infinito, un angulo recto y otro angulo positivo α, se tiene quesenα cosh b = 1, donde b denota la longitud hiperbolica del lado finito.
6. Demuestre que existen parametrizaciones de curvas que minimizan la dis-tancia hiperbolica entre dos puntos, pero que sin embargo sus derivadas seanulan en un numero finito de puntos.
7. Pruebe de manera geometrica el Lema 2.2.8.
b
b
b
b
b z
i |z|
α
α
α
b
Figura 2.8: Paralelismo
2.3. El modelo del disco de Poincare
La relacion (2.1) descrita en la seccion de densidades permite exhibir, sin grandificultad, el disco unitario ∆ como un segundo modelo del plano hiperbolico.Recordamos del primer capıtulo que la funcion de Cayley
f(z) =z − i
z + i
es una biyeccion conforme de H2 en el disco unitario ∆.Para encontrar la metrica hiperbolica en ∆, primero hay que calcular la
funcion inversa de f y su factor de conformalidad. Se tiene que
f−1
(w) =iw + i
−w + 1,

60 CAPITULO 2. METRICA HIPERBOLICA
y
f ′(z) =(z + i)− (z − i)
(z + i)2=
2i
(z + i)2.
Ahora, se sigue de las ecuaciones de Cauchy-Riemann que el factor de con-formalidad, denotado en (2.1) por µ(z) esta dado por |f ′(z)|, por lo cual
µ(z) =2
|z + i|2.
Tambien
Im[f−1(w)
]= Re
[w + 1
1− w
]= Re
[(w + 1)(1− w)
|1− w|2
]=
1− |w|2
|1− w|2.
Finalmente, juntando esta informacion se tiene
σ(w) =λ
(f−1
(w))
µ(f−1
(w)) =
∣∣∣ f −1(w) + i
∣∣∣ 2
2 Imf−1
(w)
=
|1− w|2∣∣∣∣ iw + i
1− w+ i
∣∣∣∣ 2
2(1− |w|2)=
2
1− |w|2.
Estos calculos establecen una densidad en ∆ que define la metrica hiperboli-ca en este segundo modelo (descubierto por Beltrami).
Definicion 13 El disco unitario ∆ = {z ∈ C∣∣ |z| < 1} provisto con la
metrica definida por la densidad
σ(w) =2
1− |w|2,
se le conoce como el disco de Poincare y a la metrica inducida se le llamahiperbolica.
A ambos modelos, el disco de Poincare y el semiplano H2, se les conocecomo el plano hiperbolico. Se sigue de las observaciones y definiciones ante-riores que la funcion f es una isometrıa hiperbolica entre estos dos “discos”de la esfera de Riemann.
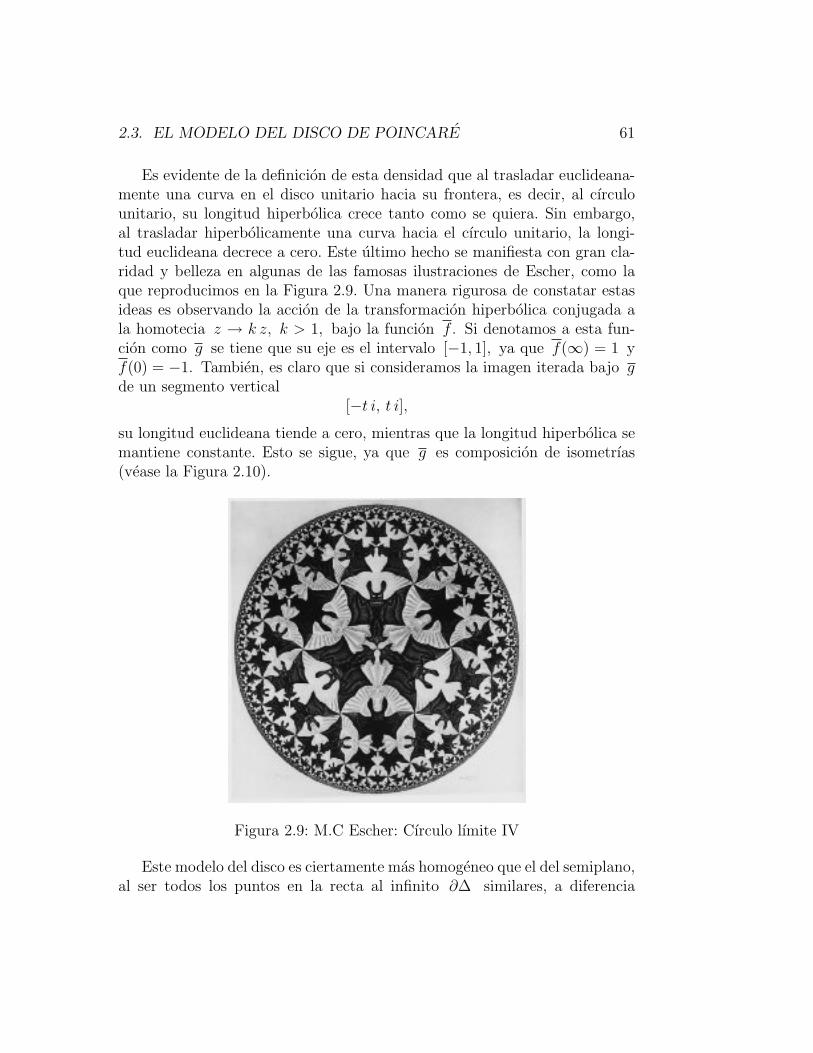
2.3. EL MODELO DEL DISCO DE POINCARE 61
Es evidente de la definicion de esta densidad que al trasladar euclideana-mente una curva en el disco unitario hacia su frontera, es decir, al cırculounitario, su longitud hiperbolica crece tanto como se quiera. Sin embargo,al trasladar hiperbolicamente una curva hacia el cırculo unitario, la longi-tud euclideana decrece a cero. Este ultimo hecho se manifiesta con gran cla-ridad y belleza en algunas de las famosas ilustraciones de Escher, como laque reproducimos en la Figura 2.9. Una manera rigurosa de constatar estasideas es observando la accion de la transformacion hiperbolica conjugada ala homotecia z → k z, k > 1, bajo la funcion f. Si denotamos a esta fun-cion como g se tiene que su eje es el intervalo [−1, 1], ya que f(∞) = 1 yf(0) = −1. Tambien, es claro que si consideramos la imagen iterada bajo gde un segmento vertical
[−t i, t i],
su longitud euclideana tiende a cero, mientras que la longitud hiperbolica semantiene constante. Esto se sigue, ya que g es composicion de isometrıas(vease la Figura 2.10).
Figura 2.9: M.C Escher: Cırculo lımite IV
Este modelo del disco es ciertamente mas homogeneo que el del semiplano,al ser todos los puntos en la recta al infinito ∂∆ similares, a diferencia
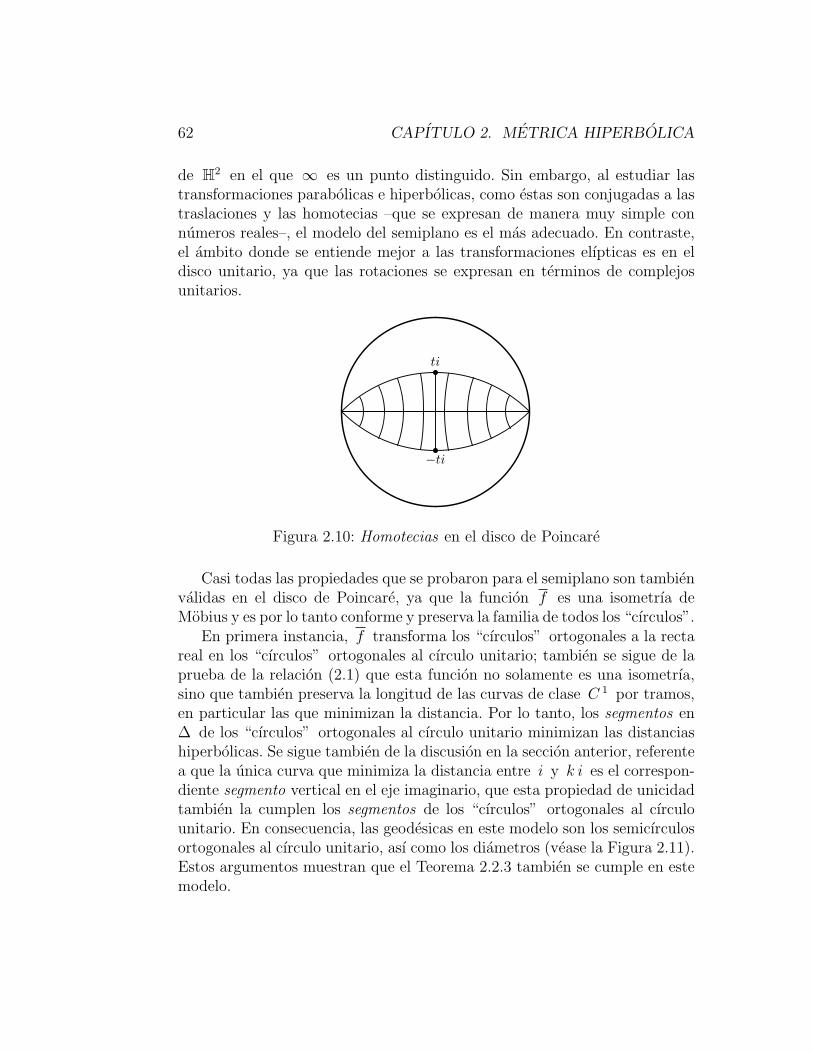
62 CAPITULO 2. METRICA HIPERBOLICA
de H2 en el que ∞ es un punto distinguido. Sin embargo, al estudiar lastransformaciones parabolicas e hiperbolicas, como estas son conjugadas a lastraslaciones y las homotecias –que se expresan de manera muy simple connumeros reales–, el modelo del semiplano es el mas adecuado. En contraste,el ambito donde se entiende mejor a las transformaciones elıpticas es en eldisco unitario, ya que las rotaciones se expresan en terminos de complejosunitarios.
ti
−ti
Figura 2.10: Homotecias en el disco de Poincare
Casi todas las propiedades que se probaron para el semiplano son tambienvalidas en el disco de Poincare, ya que la funcion f es una isometrıa deMobius y es por lo tanto conforme y preserva la familia de todos los “cırculos”.
En primera instancia, f transforma los “cırculos” ortogonales a la rectareal en los “cırculos” ortogonales al cırculo unitario; tambien se sigue de laprueba de la relacion (2.1) que esta funcion no solamente es una isometrıa,sino que tambien preserva la longitud de las curvas de clase C 1 por tramos,en particular las que minimizan la distancia. Por lo tanto, los segmentos en∆ de los “cırculos” ortogonales al cırculo unitario minimizan las distanciashiperbolicas. Se sigue tambien de la discusion en la seccion anterior, referentea que la unica curva que minimiza la distancia entre i y k i es el correspon-diente segmento vertical en el eje imaginario, que esta propiedad de unicidadtambien la cumplen los segmentos de los “cırculos” ortogonales al cırculounitario. En consecuencia, las geodesicas en este modelo son los semicırculosortogonales al cırculo unitario, ası como los diametros (vease la Figura 2.11).Estos argumentos muestran que el Teorema 2.2.3 tambien se cumple en estemodelo.
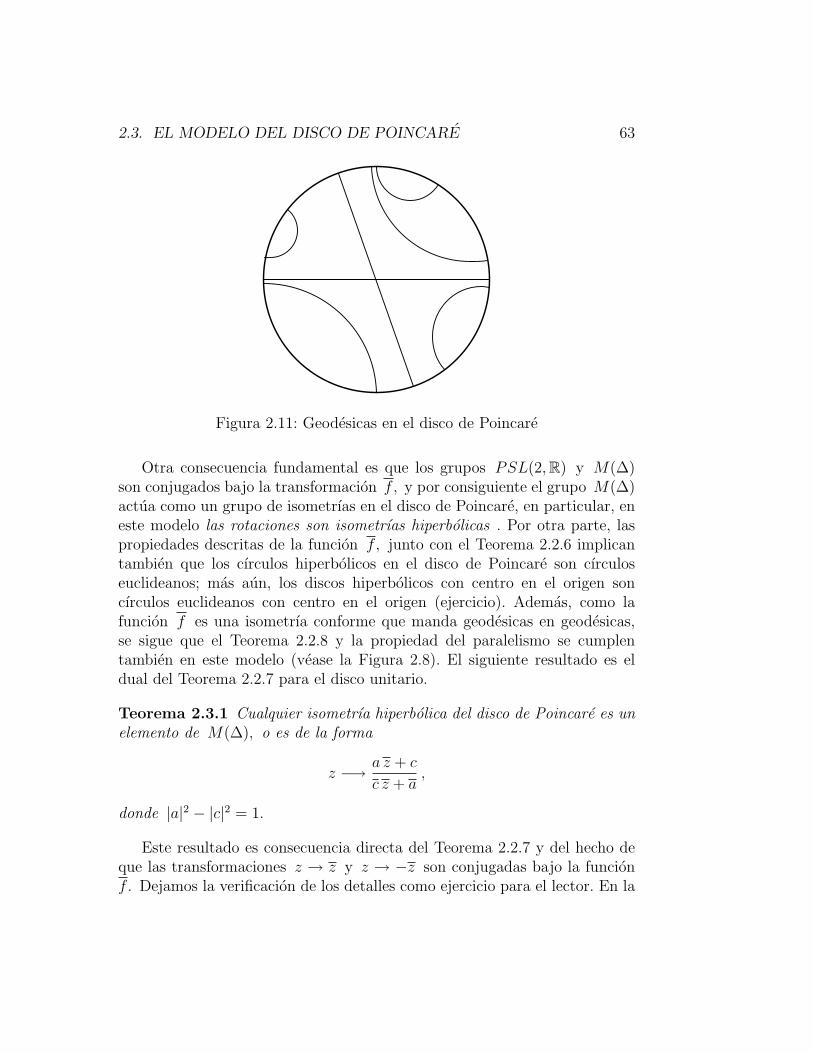
2.3. EL MODELO DEL DISCO DE POINCARE 63
Figura 2.11: Geodesicas en el disco de Poincare
Otra consecuencia fundamental es que los grupos PSL(2,R) y M(∆)son conjugados bajo la transformacion f, y por consiguiente el grupo M(∆)actua como un grupo de isometrıas en el disco de Poincare, en particular, eneste modelo las rotaciones son isometrıas hiperbolicas . Por otra parte, laspropiedades descritas de la funcion f, junto con el Teorema 2.2.6 implicantambien que los cırculos hiperbolicos en el disco de Poincare son cırculoseuclideanos; mas aun, los discos hiperbolicos con centro en el origen soncırculos euclideanos con centro en el origen (ejercicio). Ademas, como lafuncion f es una isometrıa conforme que manda geodesicas en geodesicas,se sigue que el Teorema 2.2.8 y la propiedad del paralelismo se cumplentambien en este modelo (vease la Figura 2.8). El siguiente resultado es eldual del Teorema 2.2.7 para el disco unitario.
Teorema 2.3.1 Cualquier isometrıa hiperbolica del disco de Poincare es unelemento de M(∆), o es de la forma
z −→ a z + c
c z + a,
donde |a|2 − |c|2 = 1.
Este resultado es consecuencia directa del Teorema 2.2.7 y del hecho deque las transformaciones z → z y z → −z son conjugadas bajo la funcionf. Dejamos la verificacion de los detalles como ejercicio para el lector. En la
64 CAPITULO 2. METRICA HIPERBOLICA
siguiente seccion se probara una formula general para la distancia entre dospuntos cualesquiera en ∆. A continuacion probamos un caso particular.
Lema 2.3.2 La distancia hiperbolica del origen a un punto z en el disco dePoincare esta dada por
log1 + |z|1− |z|
. (2.3)
Demostracion. Se sigue de las observaciones anteriores que basta calcularla longitud hiperbolica del segmento de geodesica [ 0, |z| ], el cual se puedeparametrizar por γ : [0, |z| ] → ∆, γ(t) = t. Por lo cual
lh(γ) =
∫ |z|
0
2
1− t2dt =
∫ |z|
0
1
1 + tdt+
∫ |z|
0
1
1− tdt,
lo cual implica el resultado. �
EJERCICIOS
1. Demuestre que los cırculos hiperbolicos con centro en el origen son cırculoseuclideanos con centro en el origen.
2. Pruebe que el grupo M(∆) actua transitivamente en geodesicas de ∆ yen puntos de ∆.
3. Demuestre directamente, sin hacer uso del semiplano superior, que la fun-cion z → z es una isometrıa hiperbolica del disco de Poincare.
4. Demuestre que las funciones en PSL(2,C) que preservan tanto el origencomo el cırculo unitario son rotaciones.
5. Verifique los detalles de la prueba del Teorema 2.3.1.
2.4. El grupo completo de isometrıas
A fin de conocer con mas detalle el grupo de todas las isometrıas del planohiperbolico, ya sea el modelo del semiplano o el del disco, es convenienteintroducir el grupo general de Mobius actuando en C. Para esto definimosprimero las reflexiones en cırculos y rectas. Denotaremos por u∗ a u/|u|2,donde u ∈ C, y por C(a, r) al cırculo con centro en a y radio r, es decir,
{z ∈ C∣∣ |z − a| = r}.

2.4. EL GRUPO COMPLETO DE ISOMETRIAS 65
Definicion 14 Se define la reflexion (o inversion) en C(a, r), como
ϕ (z) =
{ a+ r2(z − a)∗, si z ∈ C, z 6= a,∞, si z = a,a, si z = ∞.
Exactamente la misma definicion se aplica para esferas
S(a, r) = {x ∈ Rn∣∣ |x− a| = r}
en Rn = Rn ∪ {∞}.La proyeccion estereografica se puede definir en cualquier dimension, una
demostracion muy similar a la que se hizo al principio del libro muestra queesta funcion es una biyeccion entre Rn∪{∞} y la esfera unitaria centrada enel origen en Rn+1. Para medir continuidad de las funciones en Rn ∪{∞} seusa la metrica cordal, la cual se deriva de manera analoga al caso complejo,mas aun, la formula que se obtiene es exactamente la misma que la de laDefinicion 2 en el capıtulo 1 (cf. [2] pp. 20-22).
Geometricamente es evidente que ϕ es una involucion y que
ϕ (z) = z ⇐⇒ z ∈ C(a, r).
Una prueba analıtica de estos hechos, en cualquier dimension, es ademasmuy simple (ejercicio). Esta funcion ϕ es tambien continua en la esfera deRiemann con la metrica cordal, dejamos la verificacion de este hecho comoejercicio para el lector; observese que esta prueba tambien se aplica en Rn.Un calculo sencillo –que se aplica tambien a esferas en Rn– muestra que siT es la traslacion z → z − a, S la homotecia z → z/r y ψ la reflexion enel cırculo unitario ∂∆, entonces
ϕ = T−1S−1ψ S T . (2.4)
Para definir las reflexiones en rectas conviene identificar al plano complejoextendido con R2, de esta manera se puede usar el producto escalar usual enR2. Con este producto, los puntos de una recta en R2 estan determinadospor la siguiente expresion
R(a, t) ={z ∈ R2
∣∣ z · a = t, a ∈ R2 − {0}, t ∈ R}∪ {∞}.
La misma ecuacion define un plano en Rn de codimension uno
P (a, t) ={x ∈ Rn
∣∣ x · a = t, a ∈ Rn − {0}, t ∈ R}∪ {∞}.

66 CAPITULO 2. METRICA HIPERBOLICA
Resulta conveniente, para simplificar los calculos, tomar al vector normala de longitud 1 . Con esta convencion el punto t a ∈ R(a, t) y se sigue delteorema de Pitagoras que el numero t es la distancia de la recta –o del plano–al origen, ya que si y, z ∈ R(a, t), entonces el vector y − z es ortogonal alvector a.
Observese que dado un punto z ∈ R2, si ϕ es la reflexion en la rectaR(a, t), entonces, si ϕ(z) = z +ma, m ∈ R, se tiene que
z +ma+ z
2∈ R(a, t)
(vease la Figura 2.12), por lo cual z · a+m/2 = t.
Definicion 15 Se define la reflexion (o inversion) en R(a, t) como la fun-
cion ϕ : R2 → R2, dada por
ϕ (z) =
{z − 2(z · a− t) a, si z ∈ R2,∞, si z = ∞,
donde |a| = 1.
0
θ
a
z
ϕ(z)
Figura 2.12: Reflexion en una recta por el origen
Esta misma definicion se aplica a reflexiones en planos P (a, t) en Rn.Analogamente al caso de los cırculos, ϕ es una involucion y
ϕ (z) = z ⇐⇒ z ∈ R(a, t).
Notese que la funcion T (z) = z − ta traslada la recta R(a, t) a la rectapor el origen R(a, 0), mas aun, si ψ denota la reflexion en esta nueva recta,

2.4. EL GRUPO COMPLETO DE ISOMETRIAS 67
entonces un calculo sencillo muestra que ϕ = T−1ψ T . Estas ultimas afirma-
ciones se cumplen tambien para planos P (a, t) en Rn (ejercicio). Ademas,si ϕ es la reflexion en el plano P (a, 0), entonces ϕ es lineal y preserva nor-mas, por ende, es ortogonal; esto se sigue de un calculo elemental que quedacomo ejercicio para el lector. El siguiente resultado relaciona las distintasreflexiones sobre rectas por el origen.
Proposicion 2.4.1 Sean ψ(z) = z, S(z) = eiθz y ϕ la reflexion en larecta L que pasa por el origen y por eiθ, donde 0 < θ ≤ π, entonces
ϕ = S ψ S−1.
Demostracion. Un vector normal unitario a L esta dado por a = ieiθ.Escribiendo a = a1 + ia2 y z = x+ iy, se tiene que Re (z a) = a1x+ a2y,por lo cual
ϕ(z) = z − 2Re (z a) a = z − (z a+ a z) a = −a2 z.
Finalmente,
ϕS(z) = ϕ(ei θz) = ei 2 θ e−i θ z = ei θ z = S( z) = S ψ(z).
�
La proposicion anterior muestra de nuevo que las reflexiones en rectaspor el origen son funciones lineales ortogonales, y por lo tanto las reflexionesen rectas son conformes. Mas aun, la prueba de dicha proposicion exhibe lamatriz que determina la reflexion como funcion lineal de R2 en R2(
cos2 θ −sen2 θsen2 θ cos2 θ
) (1 00 −1
)=
(cos2 θ sen2 θsen2 θ −cos2 θ
). (2.5)
En Rn, las reflexiones en planos de codimension uno son tambien conformes,al ser conjugadas por traslaciones a funciones lineales ortogonales.
Como las funciones en PSL(2,C) y la funcion z → z son continuasen la esfera de Riemann con la metrica cordal, se sigue de la Proposicion2.4.1 que la reflexion en cualquier recta es tambien continua en todos lospuntos incluyendo ∞. En general, las traslaciones y las transformacionesortogonales son continuas en Rn con la metrica cordal, ya que, como enel caso complejo, si se tiene una sucesion de puntos finitos en la esfera deRiemann xn, n ∈ N, entonces
dC(xn,∞) 7−→ 0 ⇐⇒ xn 7−→ ∞.

68 CAPITULO 2. METRICA HIPERBOLICA
De esta ultima observacion se deriva tambien que las reflexiones en planosson continuas en Rn. Con esta terminologıa se puede definir el grupo generalde Mobius.
Definicion 16 El grupo general de Mobius actuando en R2, denotado porGM(R2), consiste en todas las funciones que son una composicion finita dereflexiones en “cırculos”.
W2
L1
L2
W1
Figura 2.13: Una transformacion hiperbolica es la composicion de dosreflexiones en “cırculos” ajenos
Se sigue facilmente de las observaciones anteriores que estas funcionesson auto-homeomorfismos de la esfera de Riemann y que forman un grupo.Se denota por M(R2) al subgrupo formado por las funciones que son com-posiciones de un numero par de reflexiones. Este subgrupo, que resulta serPSL(2,C) (Teorema 2.4.4) consiste en aquellas transformaciones que preser-
van la orientacion. Se dice que una funcion en GM(R2) preserva la orientacion,si el determinante de su matriz jacobiana en cualquier punto finito (con valorfinito) es positivo (la consistencia de esta definicion se puede verificar, porejemplo, en [2] pp. 25 y 26).
La relacion (2.4) implica que la reflexion en el cırculo C(a, r) es conformeen C − {a}. Esto se sigue, ya que la matriz jacobiana de la inversion en elcırculo unitario, en un punto (x, y) ∈ R2, distinto del origen, esta dada por
y2 − x2
(x2 + y2)2
−2xy
(x2 + y2)2
−2xy
(x2 + y2)2
x2 − y2
(x2 + y2)2
,
la cual es una matriz escalar, multiplicada por una matriz de la forma (2.5).
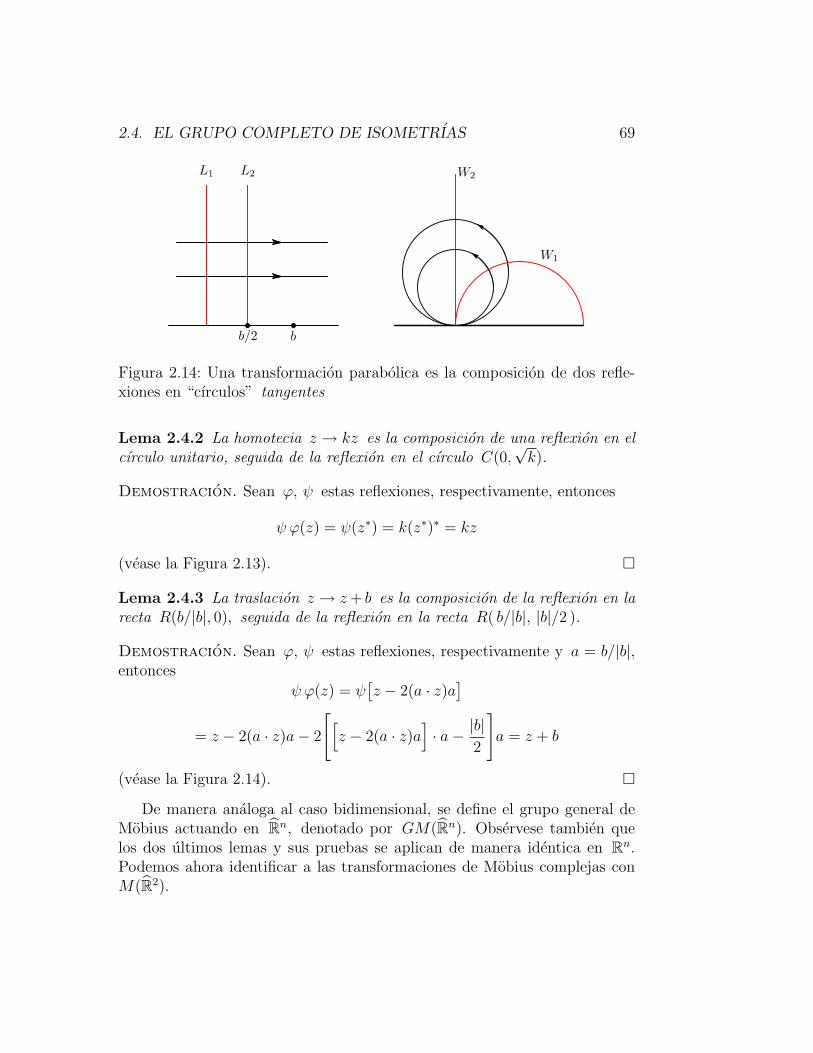
2.4. EL GRUPO COMPLETO DE ISOMETRIAS 69
W1
W2L1 L2
b/2 b
Figura 2.14: Una transformacion parabolica es la composicion de dos refle-xiones en “cırculos” tangentes
Lema 2.4.2 La homotecia z → kz es la composicion de una reflexion en elcırculo unitario, seguida de la reflexion en el cırculo C(0,
√k).
Demostracion. Sean ϕ, ψ estas reflexiones, respectivamente, entonces
ψ ϕ(z) = ψ(z∗) = k(z∗)∗ = kz
(vease la Figura 2.13). �
Lema 2.4.3 La traslacion z → z+ b es la composicion de la reflexion en larecta R(b/|b|, 0), seguida de la reflexion en la recta R( b/|b|, |b|/2 ).
Demostracion. Sean ϕ, ψ estas reflexiones, respectivamente y a = b/|b|,entonces
ψ ϕ(z) = ψ[z − 2(a · z)a
]= z − 2(a · z)a− 2
[[z − 2(a · z)a
]· a− |b|
2
]a = z + b
(vease la Figura 2.14). �
De manera analoga al caso bidimensional, se define el grupo general deMobius actuando en Rn, denotado por GM(Rn). Observese tambien quelos dos ultimos lemas y sus pruebas se aplican de manera identica en Rn.Podemos ahora identificar a las transformaciones de Mobius complejas conM(R2).

70 CAPITULO 2. METRICA HIPERBOLICA
Teorema 2.4.4 PSL(2,C) = M(R2).
Demostracion. Probamos primero que aquellas transformaciones del grupogeneral de Mobius que preservan la orientacion, estan en PSL(2,C). Parademostrar este hecho, mostramos en primera instancia que las reflexiones en“cırculos” son de la forma
z 7−→ az + b
cz + d, (2.6)
donde ad− bc 6= 0.La reflexion en el cırculo C(a, r) esta definida por
z 7−→ a+ r2 (z − a)
|z − a|2= a+ r2 1
z − a
=a (z − a) + r2
z − a=az + r2 − |a|2
z − a,
que es de la forma (2.6), ya que r 6= 0.Por otra parte, se probo que la reflexion en la recta R(a, t) es la composi-
cion T−1ψ T , donde T (z) = z− ta y ψ es la reflexion en la recta R(a, 0).
Tambien, se mostro –en la prueba de la Proposicion 2.4.1– que la funcion ψesta determinada por z → −a2 z, y por consiguiente la reflexion en la rectaR(a, t) esta dada por
z 7−→ T−1
(ψ(z − ta)) = T−1
(−a2 (z − t a)) = −a2 z + 2 t a,
que es de la forma (2.6).Ahora, la composicion de dos transformaciones de esta forma es una fun-
cion en PSL(2,C). Esto se sigue, ya que dadas dos de estas funciones
ϕ(z) =az + b
cz + dy ψ(z) =
αz + β
γz + δ,
calculando (como en el caso de PSL(2,C) ), se tiene que ψ ϕ coincide conla transformacion definida en PSL(2,C) por el producto de matrices(
α βγ δ
) (a b
c d
)(se prueba la igualdad primero con el algebra y posteriormente se concluyela validez en todos los puntos de la esfera de Riemann por continuidad). Por
consiguiente, M(R2) ⊂ PSL(2,C).
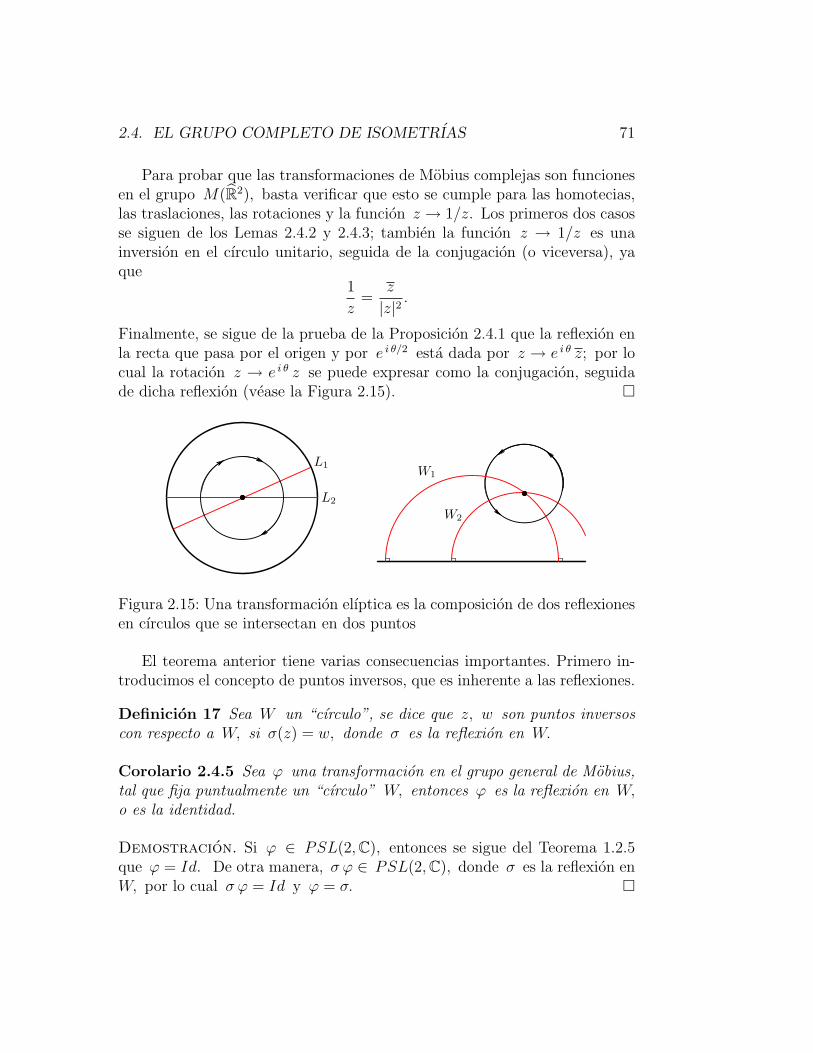
2.4. EL GRUPO COMPLETO DE ISOMETRIAS 71
Para probar que las transformaciones de Mobius complejas son funcionesen el grupo M(R2), basta verificar que esto se cumple para las homotecias,las traslaciones, las rotaciones y la funcion z → 1/z. Los primeros dos casosse siguen de los Lemas 2.4.2 y 2.4.3; tambien la funcion z → 1/z es unainversion en el cırculo unitario, seguida de la conjugacion (o viceversa), yaque
1
z=
z
|z|2.
Finalmente, se sigue de la prueba de la Proposicion 2.4.1 que la reflexion enla recta que pasa por el origen y por e i θ/2 esta dada por z → e i θ z; por locual la rotacion z → e i θ z se puede expresar como la conjugacion, seguidade dicha reflexion (vease la Figura 2.15). �
L1
L2
W1
W2
Figura 2.15: Una transformacion elıptica es la composicion de dos reflexionesen cırculos que se intersectan en dos puntos
El teorema anterior tiene varias consecuencias importantes. Primero in-troducimos el concepto de puntos inversos, que es inherente a las reflexiones.
Definicion 17 Sea W un “cırculo”, se dice que z, w son puntos inversoscon respecto a W, si σ(z) = w, donde σ es la reflexion en W.
Corolario 2.4.5 Sea ϕ una transformacion en el grupo general de Mobius,tal que fija puntualmente un “cırculo” W, entonces ϕ es la reflexion en W,o es la identidad.
Demostracion. Si ϕ ∈ PSL(2,C), entonces se sigue del Teorema 1.2.5que ϕ = Id. De otra manera, σ ϕ ∈ PSL(2,C), donde σ es la reflexion enW, por lo cual σ ϕ = Id y ϕ = σ. �
72 CAPITULO 2. METRICA HIPERBOLICA
Corolario 2.4.6 Sean σ1, σ2 las reflexiones en los “cırculos” W1 y W2,respectivamente, entonces σ1 y σ2 son conjugadas en el grupo general deMobius GM(R2), en particular, la transformacion conjugante se puede tomaren PSL(2,C).
Demostracion. Sea T ∈ PSL(2,C), tal que T (W1) = W2, entonces como
T−1σ2 T fija puntualmente W1, se sigue del corolario anterior que
T−1σ2 T = σ1.
�
Corolario 2.4.7 Sea ϕ ∈ GM(R2) y W1, W2, “cırculos.en la esfera de Rie-mann, tales que ϕ(W1) = W2, entonces ϕ manda puntos inversos con re-specto a W1 en puntos inversos con respecto a W2.
Demostracion. Se sigue de los resultados anteriores que si σ1 y σ2 denotanlas reflexiones en los “cırculos” W1, W2, respectivamente, entonces
ϕ−1σ2 ϕ = σ1,
por lo cual
σ2 ϕ = ϕσ1.
Ahora, si z, w son puntos inversos con respecto a W1, se tiene
σ2 ϕ(z) = ϕσ1(z),
y
σ2 ϕ(z) = ϕ (w),
lo que prueba el resultado. �
Estos corolarios son tambien validos en Rn (vease [2] pp. 31, 32). Tam-bien, se siguen del Teorema 2.4.4 otros resultados muy importantes del planohiperbolico.
Corolario 2.4.8 Sea σ la reflexion en un “cırculo” W que es ortogonal aleje real, entonces la restriccion de σ a H2 es una isometrıa hiperbolica.

2.4. EL GRUPO COMPLETO DE ISOMETRIAS 73
Demostracion. Sea T ∈ PSL(2,R), tal que T transforma el “cırculo” Wen el eje imaginario, entonces si ψ denota la reflexion en el eje imaginario,se sigue que
σ = T−1ψ T ,
es decir, es una composicion de isometrıas que preservan H2. �
Este ultimo resultado se aplica tambien para reflexiones en “cırculos” orto-gonales al cırculo unitario en el disco de Poincare (ejercicio). Mas aun, usandoel Ejercicio 1.5.2 y el Teorema 2.2.7, se sigue que las reflexiones en “cırculos”ortogonales a la recta real (o al cırculo unitario) generan el grupo completode isometrıas del plano hiperbolico H2 (o ∆).
Aplicamos ahora los resultados sobre las reflexiones, para encontrar laformula general de la distancia hiperbolica entre dos puntos del disco dePoincare. En este proceso, el analisis de ciertas ecuaciones, que cumplenlas reflexiones en cırculos ortogonales a ∂∆, permite exhibir expresionesinvariantes bajo las isometrıas de este modelo. Tambien, se prueba que laproyeccion estereografica es la restriccion de una reflexion en una esfera. Acontinuacion generalizamos la formula de la distancia cordal.
Proposicion 2.4.9 Sea S(a, r) la esfera con centro en a y radio r en Rn,es decir, {
x ∈ Rn∣∣ |x− a| = r
},
y sea ϕ la reflexion en S(a, r), entonces si x, y ∈ Rn − {a}, se tiene
|ϕ(x)− ϕ(y)| = r2 |x− y||x− a| |y − a|
.
Demostracion. Usando el producto escalar estandar en Rn, se sigue di-rectamente de la definicion que
|ϕ(x)− ϕ(y)|2 = r4 |(x− a)∗ − (y − a)∗|2
= r4
(1
|x− a|2+
1
|y − a|2− 2
(x− a) · (y − a)
|x− a|2|y − a|2
)
= r4
(|y − a|2 + |x− a|2 − 2(x− a) · (y − a)
|x− a|2|y − a|2
)= r4 |x− y|2
|x− a|2 |y − a|2.
�

74 CAPITULO 2. METRICA HIPERBOLICA
Esta formula es particularmente interesante al aplicarla a la reflexion ϕen la esfera de R3, cuyo centro es el punto e 3 = (0, 0, 1) y su radio es√
2. Un primer hecho notable es que al aplicar esta reflexion a puntos delplano complejo se obtiene precisamente la funcion estereografica descrita alprincipio del libro
ϕ(x, y, 0) = (0, 0, 1) + 2 [(x, y, 0)− (0, 0, 1)]∗
=
(2x
x2 + y2 + 1,
2 y
x2 + y2 + 1,x2 + y2 − 1
x2 + y2 + 1
),
lo cual muestra que la proyeccion estereografica es la restriccion, al planocomplejo, de una reflexion en una esfera en R3, es decir, de una funcion deMobius del grupo GM( R3). Al ser esta reflexion una involucion, se tieneque tambien su restriccion a la esfera unitaria es la inversa de esta funcionestereografica, esto es, si (x1, x2, x3) ∈ S2, entonces
ϕ(x1, x2, x3) =
(x1
1− x3
,x2
1− x3
, 0
).
Ahora, la Proposicion 2.4.9 implica de manera inmediata la formula dela distancia cordal para la esfera de Riemann, la cual se probo en el primercapıtulo; en efecto, si z, w ∈ C, se tiene
|ϕ(z)− ϕ(w)| = 2|z − w|
|z − e 3| |w − e 3|=
2 |z − w|√( |z|2 + 1)
√( |w|2 + 1)
,
donde z, w representan a los complejos z, w, como puntos de R3.Como ya se menciono en el Ejercicio 2.1.3, si A es un abierto en Rn y
f : A→ Rn es una funcion conforme en x0 ∈ A, entonces el lımite
lımx→x0
|f(x)− f(x0)||x− x0|
existe y es precisamente el factor de conformalidad. Se sigue entonces de laProposicion 2.4.9, que el factor de conformalidad de la reflexion en el cırculoC(a, r) en un punto z, z 6= a, esta dado por
r2
|z − a|2.

2.4. EL GRUPO COMPLETO DE ISOMETRIAS 75
Esta ultima formula tambien es valida para reflexiones en esferas en Rn, yaque como mostraremos al final de este capıtulo, estas reflexiones son tambienconformes.
Enunciamos ahora un teorema que caracteriza aquellas isometrıas del dis-co de Poincare que son reflexiones en cırculos ortogonales al cırculo unitario.De este resultado se derivan expresiones de estas reflexiones, que junto con laProposicion 2.4.9, permiten encontrar una formula explıcita de la distanciaen este modelo del plano hiperbolico.
1r
aa∗
Figura 2.16: Cırculo ortogonal a la frontera del disco unitario
Teorema 2.4.10 Sea C(a, r) un cırculo en R2 y ϕ la reflexion en estecırculo. Entonces las siguientes afirmaciones son equivalentes:
(i) el cırculo C(a, r) es ortogonal al cırculo unitario;
(ii) ϕ(0) = a∗;
(iii) |a|2 = 1 + r2;
(iv) la reflexion ϕ preserva ∆.
Demostracion. Se sigue del teorema de Pitagoras que el cırculo C(a, r) esortogonal al cırculo unitario si y solo si
|a|2 = 1 + r2,

76 CAPITULO 2. METRICA HIPERBOLICA
y como esta condicion es equivalente a
ϕ(0) = a− r2 a∗ =(|a|2 − r2
)a∗ = a∗,
se concluye que las primeras tres afirmaciones son equivalentes. Ahora, sise cumple (iv), ϕ manda puntos inversos con respecto al cırculo unitario apuntos inversos con respecto al cırculo unitario; por lo que ϕ(0) = a∗, yaque ϕ(∞) = a (vease la Figura 2.16).
Por lo cual, basta probar que las primeras tres afirmaciones implican lacuarta. Esto se puede probar de manera muy elemental usando la funcion deCayley, ya que evidentemente una reflexion sobre un “cırculo” ortogonal ala recta real preserva el semiplano superior H2. Sin embargo, mostraremosotra prueba analıtica que proporciona una expresion necesaria para exhibirla formula de la distancia hiperbolica.
Usando la formula de la Proposicion 2.4.9, se tiene
|ϕ(z)| = |ϕ(z)− ϕ(a∗)| = r2 |z − a∗||z − a| |a− a∗|
=(|a|2 − 1)
|a|(
1− 1
|a|2
) |z − a∗||z − a|
= |a| |z − a∗||z − a|
.
Por consiguiente
1− |ϕ(z)|2 =|z − a|2 − |a|2 |z − a∗|2
|z − a|2.
Ahora, el numerador de esta expresion esta dado por
|z − a|2 −∣∣∣ |a| z − a
|a|
∣∣∣2= |z|2 + |a|2 − |z|2|a|2 − 1 = r2(1− |z|2).
En consecuencia
1− |ϕ(z)|2 =r2(1− |z|2)|z − a|2
, (2.7)
y se sigue de manera inmediata que ϕ preserva el disco unitario. �
Una prueba casi identica que usa el producto inversivo, para sustituir elteorema de Pitagoras, muestra que este resultado es tambien valido en la bola

2.4. EL GRUPO COMPLETO DE ISOMETRIAS 77
n-dimensional (vease [2] pp. 38 y 39). El Teorema 2.4.10 y la Proposicion 2.4.9implican la existencia de una expresion que es invariante bajo las isometrıashiperbolicas del disco (y de la bola n-dimensional).
Teorema 2.4.11 La expresion
|z − w|2
(1− |z|2) (1− |w|2), (2.8)
z, w ∈ ∆, es invariante bajo las isometrıas del disco de Poincare.
Demostracion. Basta probar la invariabilidad bajo las reflexiones en “cırcu-los” ortogonales al cırculo unitario, ya que estas generan el grupo completode isometrıas. Si ϕ es una reflexion en una recta por el origen, entonces ϕes una funcion lineal ortogonal y por lo tanto es una isometrıa euclideana, yes evidente que preserva la expresion (2.8). Ahora, si ϕ es la reflexion en elcırculo C(a, r), se sigue de la Proposicion 2.4.9 y de la igualdad (2.7) que
|ϕ(z)− ϕ(w)|2∣∣1− |ϕ(z)|2∣∣ ∣∣1− |ϕ(w)|2
∣∣=
(|z − a|2
r2(1− |z|2)|w − a|2
r2(1− |w|2)
) (r4 |z − w|2
|z − a|2 |w − a|2
)
=|z − w|2∣∣1− |z|2∣∣ ∣∣1− |w|2∣∣ .
�
Finalmente, se puede ahora enunciar y verificar una formula general de ladistancia hiperbolica en el disco de Poincare. Este teorema tambien es validoen la bola n-dimensional (cf. [2] p. 40 ).
Teorema 2.4.12 Sean z, w puntos en el disco hiperbolico de Poincare, en-tonces
sen h2 1
2ρ(z, w) =
|z − w|2
(1− |z|2) (1− |w|2). (2.9)
Demostracion. Como ambas expresiones son invariantes bajo las isometrıashiperbolicas del disco, basta probar la identidad para el caso en que z = 0y w = t ∈ (0, 1), ya que cualesquiera dos puntos en ∆ se pueden man-dar mediante una isometrıa hiperbolica a esta posicion (ejercicio). Ahora, sidenotamos por u a
log
(1 + t
1− t
),

78 CAPITULO 2. METRICA HIPERBOLICA
se sigue de la expresion (2.3) que
sen h2 1
2ρ(0, t) =
(eu/2 − e−u/2
2
)2
=1
4
(eu − 2 + e−u
)=
1
4
(1 + t
1− t− 2 +
1− t
1 + t
)1
4
((1 + t)2 − 2(1− t2) + (1− t)2
1− t2
)=
t2
1− t2,
y se sigue el teorema. �
Se presentan ahora haces de geodesicas en el plano hiperbolico que des-criben de una manera geometrica las distintas isometrıas en PSL(2,R), oen M(∆). Se deduce tambien del Teorema 2.4.4 que las transformacionesparabolicas, hiperbolicas o elıpticas se pueden expresar como la composicionde dos reflexiones.
Teorema 2.4.13 Sea T ∈ PSL(2,C) parabolica, hiperbolica o elıptica, en-tonces T se puede expresar como σ2 σ1, donde σj, j = 1, 2, son reflexionesen “cırculos” W1, W2, respectivamente. Ademas
(i) si T es parabolica, entonces W1, W2 se intersectan en el punto fijo deT , es decir, son tangentes;
(ii) si T es elıptica, entonces W1, W2 se intersectan en los puntos fijos dede T ;
(iii) si T es hiperbolica, entonces W1, W2 no se intersectan.
Demostracion. Probamos los casos parabolico e hiperbolico, el caso elıpticose sigue de manera analoga, usando el modelo del disco de Poincare y ladescripcion de una rotacion como la composicion de dos reflexiones en rectaspor el origen.
Para homotecias y traslaciones, el resultado se sigue de los Lemas 2.4.2y 2.4.3. En los casos generales, digamos si T es parabolica con punto fijoα, tomando una transformacion S ∈ PSL(2,C) que mande ∞ en α, se
tiene que la transformacion conjugada S−1T S es una traslacion y se puede
expresar como la composicion σ2 σ1 de dos reflexiones sobre rectas paralelas,digamos L1 y L2. Por consiguiente, si S(Lj) = Wj, j = 1, 2, se sigue del
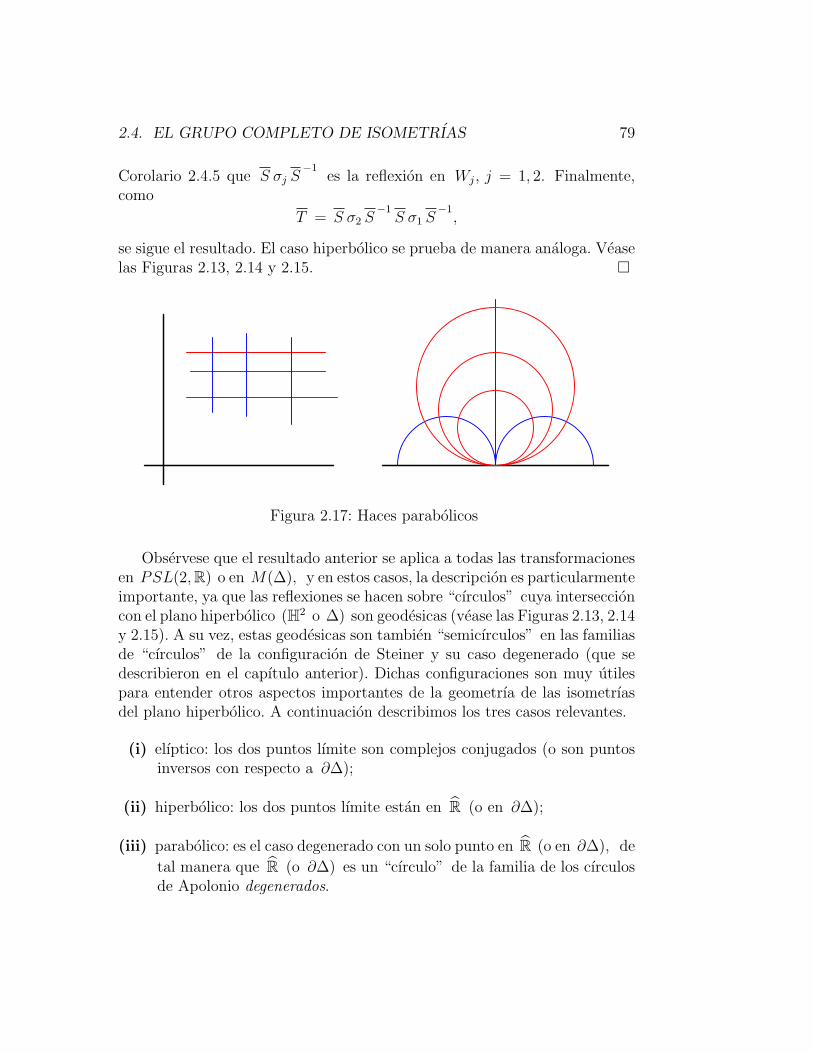
2.4. EL GRUPO COMPLETO DE ISOMETRIAS 79
Corolario 2.4.5 que S σj S−1
es la reflexion en Wj, j = 1, 2. Finalmente,como
T = S σ2 S−1S σ1 S
−1,
se sigue el resultado. El caso hiperbolico se prueba de manera analoga. Veaselas Figuras 2.13, 2.14 y 2.15. �
Figura 2.17: Haces parabolicos
Observese que el resultado anterior se aplica a todas las transformacionesen PSL(2,R) o en M(∆), y en estos casos, la descripcion es particularmenteimportante, ya que las reflexiones se hacen sobre “cırculos” cuya interseccioncon el plano hiperbolico (H2 o ∆) son geodesicas (vease las Figuras 2.13, 2.14y 2.15). A su vez, estas geodesicas son tambien “semicırculos” en las familiasde “cırculos” de la configuracion de Steiner y su caso degenerado (que sedescribieron en el capıtulo anterior). Dichas configuraciones son muy utilespara entender otros aspectos importantes de la geometrıa de las isometrıasdel plano hiperbolico. A continuacion describimos los tres casos relevantes.
(i) elıptico: los dos puntos lımite son complejos conjugados (o son puntosinversos con respecto a ∂∆);
(ii) hiperbolico: los dos puntos lımite estan en R (o en ∂∆);
(iii) parabolico: es el caso degenerado con un solo punto en R (o en ∂∆), de
tal manera que R (o ∂∆) es un “cırculo” de la familia de los cırculosde Apolonio degenerados.
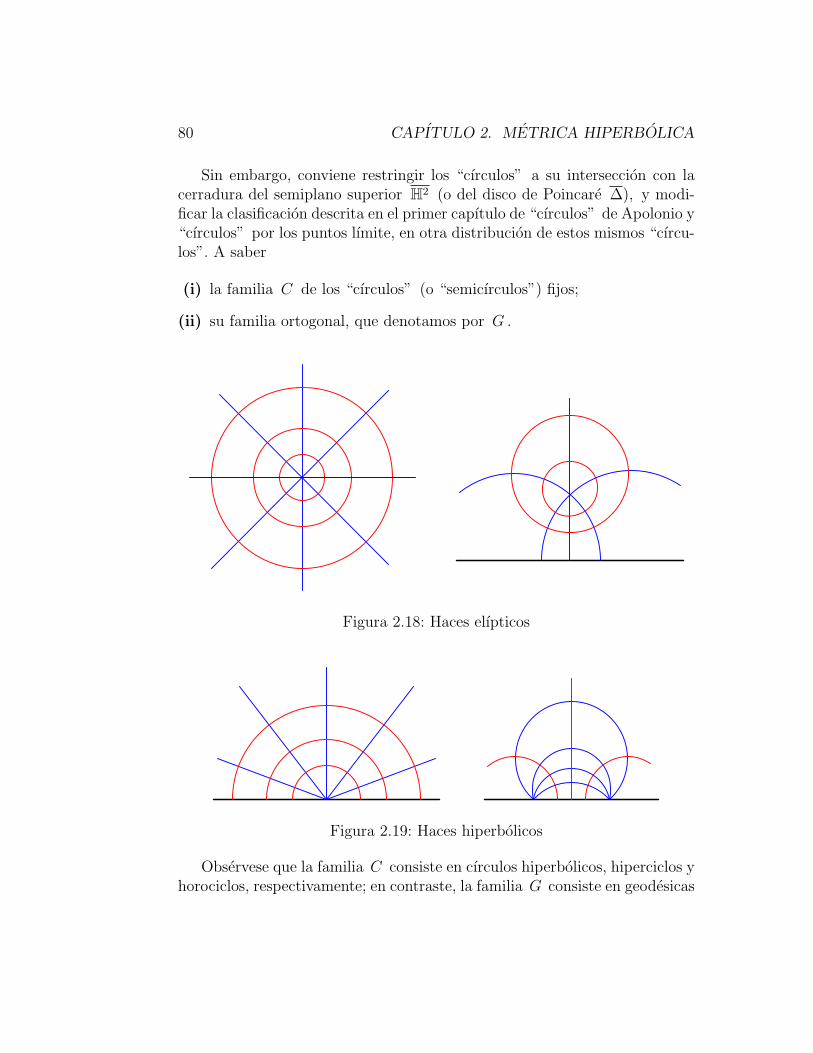
80 CAPITULO 2. METRICA HIPERBOLICA
Sin embargo, conviene restringir los “cırculos” a su interseccion con lacerradura del semiplano superior H2 (o del disco de Poincare ∆), y modi-ficar la clasificacion descrita en el primer capıtulo de “cırculos” de Apolonio y“cırculos” por los puntos lımite, en otra distribucion de estos mismos “cırcu-los”. A saber
(i) la familia C de los “cırculos” (o “semicırculos”) fijos;
(ii) su familia ortogonal, que denotamos por G .
Figura 2.18: Haces elıpticos
Figura 2.19: Haces hiperbolicos
Observese que la familia C consiste en cırculos hiperbolicos, hiperciclos yhorociclos, respectivamente; en contraste, la familia G consiste en geodesicas
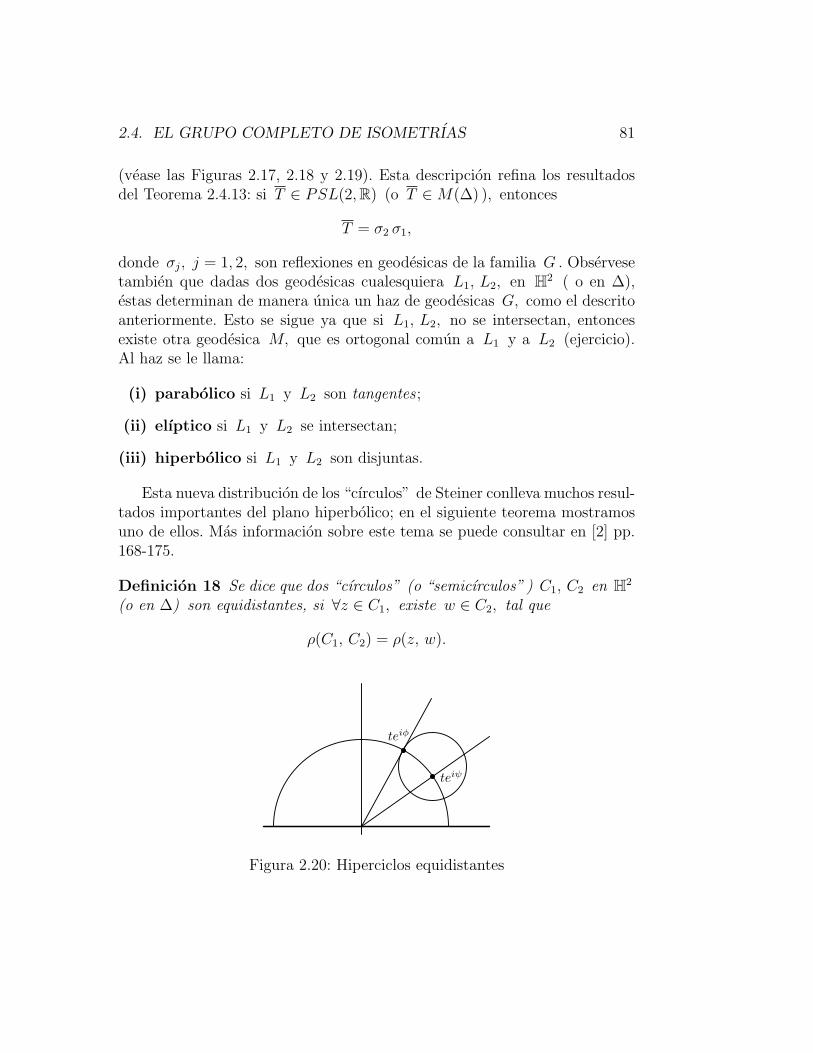
2.4. EL GRUPO COMPLETO DE ISOMETRIAS 81
(vease las Figuras 2.17, 2.18 y 2.19). Esta descripcion refina los resultadosdel Teorema 2.4.13: si T ∈ PSL(2,R) (o T ∈M(∆) ), entonces
T = σ2 σ1,
donde σj, j = 1, 2, son reflexiones en geodesicas de la familia G . Observesetambien que dadas dos geodesicas cualesquiera L1, L2, en H2 ( o en ∆),estas determinan de manera unica un haz de geodesicas G, como el descritoanteriormente. Esto se sigue ya que si L1, L2, no se intersectan, entoncesexiste otra geodesica M, que es ortogonal comun a L1 y a L2 (ejercicio).Al haz se le llama:
(i) parabolico si L1 y L2 son tangentes ;
(ii) elıptico si L1 y L2 se intersectan;
(iii) hiperbolico si L1 y L2 son disjuntas.
Esta nueva distribucion de los “cırculos” de Steiner conlleva muchos resul-tados importantes del plano hiperbolico; en el siguiente teorema mostramosuno de ellos. Mas informacion sobre este tema se puede consultar en [2] pp.168-175.
Definicion 18 Se dice que dos “cırculos” (o “semicırculos” ) C1, C2 en H2
(o en ∆) son equidistantes, si ∀z ∈ C1, existe w ∈ C2, tal que
ρ(C1, C2) = ρ(z, w).
teiψ
teiφ
Figura 2.20: Hiperciclos equidistantes

82 CAPITULO 2. METRICA HIPERBOLICA
Teorema 2.4.14 Los “cırculos” (o “semicırculos”) de la familia C sonequidistantes.
Demostracion. Mostramos el caso hiperbolico y dejamos los otros doscasos, que son mas secillos, como ejercicio. Sin perder generalidad, se puedesuponer que los hiperciclos C1, C2 son los semirayos definidos por
t ei ϕ, t ∈ R+, s eiψ, s ∈ R+,
respectivamente (vease la Figura 2.20). Ahora,
sen h2
(1
2ρ(t ei ϕ, s ei ψ)
)1
2
(cos h ρ(t ei ϕ, s ei ψ)− 1
)=
|t ei ϕ − s ei ψ|2
4 Im(t ei ϕ) Im(s ei ψ)
=(t ei ϕ − s ei ψ)(t e−i ϕ − s e−i ψ)
4 t s senϕ senψ=t2 + s2 − 2 t s cos(ϕ− ψ)
4 t s senϕ senψ
=1
4 senϕ senψ
(t
s+s
t− 2 cos(ϕ− ψ)
)
≥ 1
4 senϕ senψ(2− 2 cos(ϕ− ψ)) ,
por lo cual el ınfimo se alcanza cuando t = s. �
Observese que en la prueba del caso hiperbolico en el teorema anterior,se uso la propiedad del paralelismo para probar que
ρ(t ei ϕ, t ei ψ) = ρ(C1, C2).
Notese tambien que el teorema anterior se puede probar de manera geometri-ca usando cırculos de Apolonio apropiados. Vease la Figura 2.20.
Terminamos este capıtulo describiendo las isometrıas del espacio hiperboli-co tridimensional. Para esto, definimos primero las extensiones de Poincare,denotamos por a al punto en Rn+1, (a, 0), donde a ∈ Rn. Poincare ob-
servo que las reflexiones en “cırculos” de R2, C(a, r), R(a, t), se extiendende manera natural a reflexiones en “esferas” (planos o esferas), S(a, r), P (a, t),

2.4. EL GRUPO COMPLETO DE ISOMETRIAS 83
en R3 (vease las Figuras 2.21 y 2.22). Si ϕ es la reflexion en el cırculo C(a, r)(o en la recta R(a, t)), se denota por ϕ a la reflexion en la esfera S(a, r)
(o en el plano P (a, t)). A esta transformacion ϕ ∈ GM(R3) se le llama laextension de Poincare de ϕ.
Definicion 19 Dada ϕ ∈ GM(R2), ϕ = ϕ1 ϕ2 . . . ϕm, donde ϕj es la re-flexion en un “cırculo”, j = 1, 2, . . . ,m, se define su extension de Poincare co-mo
ϕ = ϕ1 ϕ2 . . . ϕm.
α α
Figura 2.21: Extension de Poincare de la reflexion en un cırculo
αα
Figura 2.22: Extension de Poincare de la reflexion en una recta
Usando la version tridimensional del corolario 2.4.5 (cf. [2] p. 31), sesigue facilmente que esta definicion no depende de la descomposicion de ϕen reflexiones en “cırculos”. Observese que ϕ preserva H3 y que ϕ
∣∣R2 = ϕ(ejercicio). Denotamos por
GM(R2)
al subgrupo de GM(R3), que consiste en las extensiones de Poincare de
GM(R2).
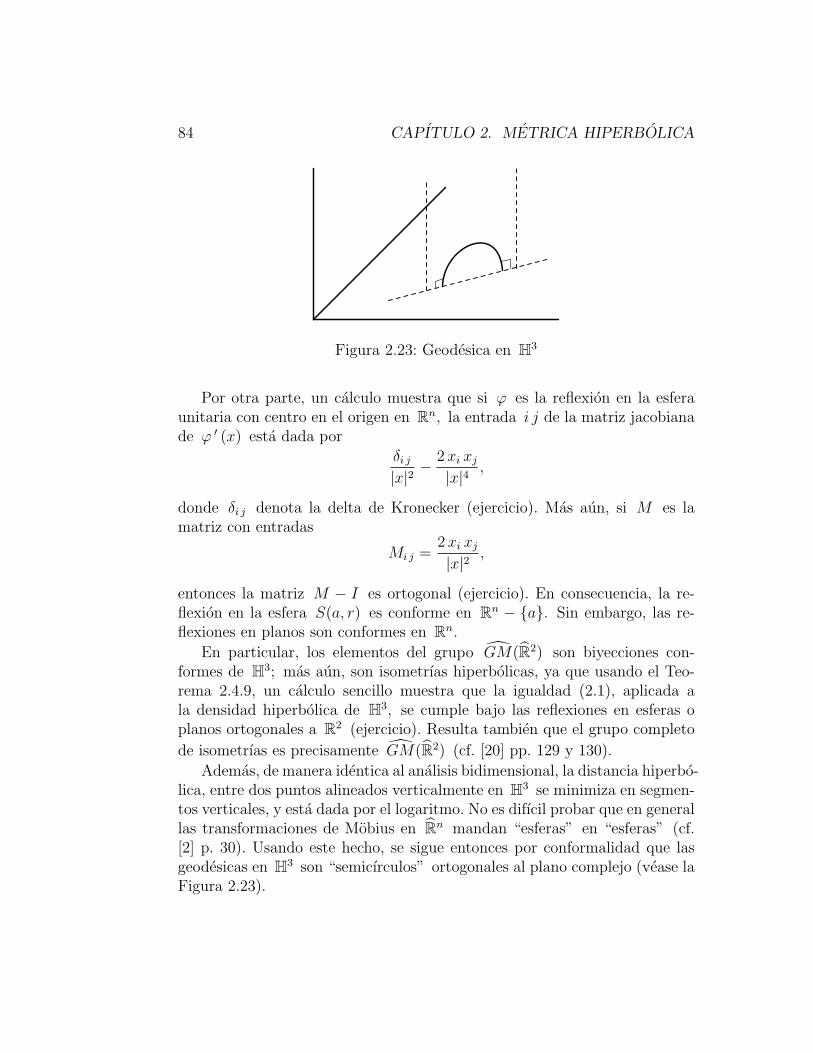
84 CAPITULO 2. METRICA HIPERBOLICA
Figura 2.23: Geodesica en H3
Por otra parte, un calculo muestra que si ϕ es la reflexion en la esferaunitaria con centro en el origen en Rn, la entrada i j de la matriz jacobianade ϕ ′ (x) esta dada por
δi j|x|2
− 2xi xj|x|4
,
donde δi j denota la delta de Kronecker (ejercicio). Mas aun, si M es lamatriz con entradas
Mi j =2xi xj|x|2
,
entonces la matriz M − I es ortogonal (ejercicio). En consecuencia, la re-flexion en la esfera S(a, r) es conforme en Rn − {a}. Sin embargo, las re-flexiones en planos son conformes en Rn.
En particular, los elementos del grupo GM(R2) son biyecciones con-formes de H3; mas aun, son isometrıas hiperbolicas, ya que usando el Teo-rema 2.4.9, un calculo sencillo muestra que la igualdad (2.1), aplicada ala densidad hiperbolica de H3, se cumple bajo las reflexiones en esferas oplanos ortogonales a R2 (ejercicio). Resulta tambien que el grupo completo
de isometrıas es precisamente GM(R2) (cf. [20] pp. 129 y 130).
Ademas, de manera identica al analisis bidimensional, la distancia hiperbo-lica, entre dos puntos alineados verticalmente en H3 se minimiza en segmen-tos verticales, y esta dada por el logaritmo. No es difıcil probar que en generallas transformaciones de Mobius en Rn mandan “esferas” en “esferas” (cf.[2] p. 30). Usando este hecho, se sigue entonces por conformalidad que lasgeodesicas en H3 son “semicırculos” ortogonales al plano complejo (vease laFigura 2.23).
2.4. EL GRUPO COMPLETO DE ISOMETRIAS 85
Finalmente, un sencillo calculo muestra que la expresion
|x− y|2
x3 y3
,
x, y ∈ H3, es invariante bajo las reflexiones en esferas o planos ortogonalesa R2 (ejercicio). En consecuencia, se sigue de los argumentos del Teorema2.2.5, que la distancia hiperbolica entre dos puntos x, y ∈ H3 esta dada por
cosh ρ(x, y) = 1 +|x− y|2
2x3 y3
.
En estos razonamientos se usa que GM(R2) es transitivo en geodesicas.Para probar esto, notese que si una geodesica L termina en un punto u delplano complejo, al aplicar la extension de Poincare de la reflexion en cualquiercırculo con centro en u, esta geodesica L es enviada a una semirecta ortogo-nal al plano complejo. A su vez, esta recta vertical se puede trasladar al ejet e3, t ∈ R+, por una traslacion de la forma x → x + a, donde a ∈ C, queciertamente es la extension de Poincare de la misma traslacion en el planocomplejo.
EJERCICIOS 2.4
1. Sea ϕ una reflexion en un “esfera ” W, demuestre de manera analıticaque ϕ es una involucion en Rn y que ϕ(z) = z si y solo si z ∈ W .
2. Demuestre que las reflexiones en “cırculos” son continuas en la esfera deRiemann.
3. Sea ϕ la reflexion en el plano P (a, t), ψ la reflexion en el plano P (a, 0)y f(x) = x− ta, demuestre que ϕ = f −1 ψ f.
4. Sea ϕ la reflexion en el plano P (a, 0) ⊂ Rn, demuestre que ϕ es ortogonal.
5. Demuestre de dos maneras que las reflexiones en “cırculos” ortogonales alcırculo unitario, restringidas al disco de Poincare ∆, son isometrıas hiperboli-cas.
6. Probar el caso elıptico en el Teorema 2.4.13.
7. Demuestre que la reflexion en la esfera S(a, r) de Rn esta dada por lafuncion f −1 g−1 ψ g f , donde f es la traslacion x→ x−a, g es la homoteciax→ x/r y ψ es la reflexion en la esfera unitaria.
86 CAPITULO 2. METRICA HIPERBOLICA
8. Demuestre de dos maneras que dados dos puntos en ∆, existe una isometrıahiperbolica en GM(∆) que los manda a los puntos 0 y t ∈ (0, 1), donde
GM(∆) denota el subgrupo de GM(R2) que preserva ∆.
9. Sean L1 y L2 dos geodesicas disjuntas y no tangentes en H2 (o en ∆),demuestre que existe otra geodesica M, que es ortogonal comun a L1 y aL2.
10. Terminar la prueba analıtica del Teorema 2.4.14 (sugerencia: usar laformula de la distancia hiperbolica en el disco de Poincare en el caso elıptico).
11. Sea T ∈ GM(∆), tal que fija el origen, demuestre que T es ortogonal.
12. Demuestre que el Lema 2.2.4 tambien es valido para el grupo completode isometrıas de H2.
13. Demuestre que si ϕ es la reflexion en un “cırculo” en R2, entonces ϕpreserva H3 y ϕ
∣∣R2 = ϕ.
14. Sea ϕ la reflexion en la esfera unitaria con centro en el origen en Rn,demuestre que la entrada i, j de la matriz jacobiana de ϕ ′ (x) esta dada porδi j
|x|2 −2xi xj
|x|4 , donde δi j denota la delta de Kronecker.
15. Sea M la matriz cuadrada de n×n con entradas Mi j =2xi xj
|x|2 , demuestreque la matriz I −M es ortogonal.
16. Demuestre que la igualdad (2.1), aplicada a la metrica hiperbolica de H3,se cumple bajo las extensiones de Poincare de las reflexiones en “cırculos”de R2.
17. Demuestre que la expresion |x−y|2x3 y3
, x, y ∈ H3, es invariante bajo las ex-
tensiones de Poincare de las reflexiones en “cırculos” de R2.
18 Demuestre que PSL(2,R) consiste en las extensiones de Poincare de
M(R).
19. Pruebe que las reflexiones en “cırculos” ortogonales a la recta real (o alcırculo unitario) generan el grupo completo de isometrıas del plano hiperboli-co H2 (o ∆).
20. Demuestre que los elementos de GM(R2) preservan la familia de “cırcu-
los” de C.
Capıtulo 3
Grupos fuchsianos
En este capıtulo se estudian algunas propiedades basicas de los subgruposde transformaciones de Mobius en PSL(2,C). Primeramente se describen elconjunto lımite y su complemento, el conjunto ordinario, ası como la discon-tinuidad. Los principales ejemplos que se presentan son el grupo modular ysus subgrupos, ya que estos constituyen temas medulares en muchas ramas delas matematicas, notablemente en la teorıa de los numeros. Posteriormente seprueba que un subgrupo de PSL(2,R) es discreto si y solo si es discontinuo.Se caracterizan los grupos abelianos discretos y los grupos estabilizadores, yse prueban condiciones sobre los puntos fijos para que un grupo sea discreto.En la seccion de grupos fuchsianos se estudian los grupos horocıclicos y lossubgrupos normales de estos, ası como los sugrupos normalizadores; tambiense prueba el sorprendente e importante teorema de Lauritzen. En la ultimaseccion, se describen propiedades mas avanzadas del conjunto lımite, como elhecho de ser –en el caso no elemental– un conjunto perfecto, que en ningunaparte es denso, y que consiste de puntos donde se acumulan todas las orbitas.Finalmente, se prueba que el conjunto lımite de un grupo fuchsiano no ele-mental es la cerradura de los puntos fijos parabolicos (o hiperbolicos), y quelos subgrupos normales de los grupos horocıclicos son horocıclicos.
3.1. Discontinuidad
Establecemos primero ciertos resultados –los cuales usaremos posteriormente–que relacionan los puntos fijos de las funciones en PSL(2,C) con sus propieda-des conmutativas. En la mayorıa de los casos estas transformaciones de
87

88 CAPITULO 3. GRUPOS FUCHSIANOS
Mobius no conmutan, resulta que dos transformaciones en PSL(2,R) con-mutan si y solo si coinciden sus puntos fijos. Denotaremos por FT el conjunto
de los puntos fijos en C de una transformacion T .
Lema 3.1.1 Sean T , S transformaciones en PSL(2,C) distintas de la iden-tidad que conmutan, entonces T preserva el conjunto de los puntos fijos deS y viceversa.
Demostracion Si α ∈ F T , se tiene que
T S(α) = S T (α) = S(α)
y por lo tanto S(α) ∈ F T , esto es, S deja invariante a F T . �
Para las transformaciones que preservan “discos” se tiene un resultadomas preciso.
Teorema 3.1.2 Dos transformaciones en PSL(2,R) distintas de la identi-dad conmutan si y solo si fijan los mismos puntos.
Demostracion. Probamos primero que si S y T fijan los mismos pun-tos, entonces conmutan. Ya que conmutar o fijar los mismos puntos sonpropiedades invariantes bajo conjugacion (ejercicio), se puede suponer queambas T y S son traslaciones, o son de la forma z → a z, y es evidenteque conmutan. Observese que esta parte del teorema se cumple tambien paratransformaciones en PSL(2,C).
Por otra parte, si T y S conmutan, consideramos dos casos.
1. T , S parabolicos.
Se sigue directamente del lema que F T = FS.
2. T no parabolico.
Si F T 6= F S , se sigue del lema anterior que S intercambia los puntos
fijos de T , y por lo tanto S2
fija tres o mas puntos y es necesariamente
la funcion identidad (ya que bajo estas hipotesis, S2
fija los puntosfijos de T y de S). Se tiene entonces que S es elıptica de orden 2,con puntos fijos conjugados entre sı; sin embargo, aplicando otra vez elLema 3.1.1, se sigue que T intercambia los puntos fijos de S, lo cuales una contradiccion, ya que T ∈ PSL(2,R). �
3.1. DISCONTINUIDAD 89
Al trabajar con subgrupos de PSL(2,C) es util constatar que si dostransformaciones no parabolicas tienen exactamente un punto fijo en comun,α, entonces el conmutador es parabolico y por supuesto fija α (ejercicio).Este ultimo resultado se puede reformular de una manera mas general (cf.[2] p. 69). A continuacion definimos los conjuntos lımite y ordinario.
Definicion 20 Se dice que α ∈ C es un punto lımite con respecto a unsubgrupo Γ de PSL(2,C), si existen z ∈ C y transformaciones distintasT n ∈ Γ, n ∈ N, tales que
T n(z) 7−→ α,
cuando n→∞.
El conjunto de puntos lımites se denota por L(Γ), o simplemente por L.Observese que se debe usar la metrica cordal para incluir a todos los puntosde la esfera de Riemann.
Definicion 21 Dado Γ < PSL(2,C), al conjunto C − L se le llama elconjunto ordinario.
Se denota por O(Γ), o simplemente por O, al conjunto ordinario. Resultaque si el conjunto lımite es finito consiste de uno o dos puntos; de otra maneraes un “cırculo”, o es toda la esfera de Riemann, o es un fractal (vease laFigura 3.1). El estudio de estos fractales ha sido objeto de una intensa laborde investigacion en los ultimos anos (cf. [16]). Por otra parte, el grupo actuade manera menos caotica en el conjunto ordinario, lo cual da lugar a una ramade la geometrıa de gran belleza e importancia, que son las teselaciones; en elsiguiente capıtulo mostraremos algunas de sus propiedades. Es asombroso elparalelismo que existe entre esta particion en dos conjuntos de la esfera deRiemann y la que se define en los sistemas dinamicos, esto es, los conjuntosde Julia y de Fatou. El estudio de la conexion entre estas dos particiones, estambien un tema de gran interes, en la investigacion reciente en geometrıahiperbolica y en los sistemas dinamicos (cf. [13]).
Observese que dado Γ < PSL(2,C), si un numero infinito de transfor-maciones fijan α, o un numero infinito de iteraciones distintas de una mismatransformacion fijan α, entonces α ∈ L. Por supuesto, los puntos donde seacumula alguna orbita definida por Γ son tambien puntos lımite.
Definicion 22 Se dice que un subgrupo Γ de PSL(2,C) es discontinuo, siel conjunto ordinario O(Γ) no es vacıo.

90 CAPITULO 3. GRUPOS FUCHSIANOS
Figura 3.1: Conjunto lımite
Esta propiedad relacionada con la discontinuidad permite construir re-giones fundamentales, como mostraremos en el siguiente capıtulo. Recor-damos que un grupo G actua en un conjunto X, si existe una funcionµ : G×X → X, tal que µ(g2 g1, x) = µ (g2, µ(g1, x)) y µ(Id, x) = x. Comoya se ha mencionado y probado, el grupo PSL(2,C) actua en la esfera de
Riemann y su subgrupo PSL(2,R) actua en H2, y tambien en R. Ahora,dado un subgrupo Γ de PSL(2,C), la relacion en la esfera de Riemannz1 ∼ z2, si existe T ∈ Γ, tal que T (z1) = z2, es evidentemente de equivalen-
cia, por lo que la accion de Γ determina una particion en C. A las clases deequivalencia se les llama orbitas, dado z ∈ C, denotaremos por Γ(z) a suorbita.
En el caso de subgrupos de PSL(2,R) las orbitas consisten en reales, o enpuntos de H2, o en puntos del semiplano inferior. En general, ninguna orbitapuede acumularse en un punto ordinario α ∈ O, ya que esto significarıa queexisten T n ∈ Γ, distintos y z ∈ C, tal que T n(z) → α.
Teorema 3.1.3 Los conjuntos lımite L(Γ) y ordinario O(Γ) definidos porun subgrupo Γ de PSL(2,C) son invariantes bajo la accion de Γ.
Demostracion. Basta probar que para toda transformacion T ∈ Γ setiene
T (L) = L,

3.1. DISCONTINUIDAD 91
ya que como T es biyectiva, esto implica tambien que T (O) = O.Si α ∈ L, existen T n distintas en Γ y z ∈ C, tal que
T n(z) 7−→ α.
Ahora, si T ∈ Γ, se sigue entonces por continuidad que
T T n(z) 7−→ T (α),
y como T T n son distintas, se tiene que T (α) ∈ L, por lo cual T (L) ⊂ L.En particular, esto se cumple tambien para T
−1, esto es, T
−1(L) ⊂ L. Por
consiguiente, componiendo con T se tiene L = T T−1
(L) ⊂ T (L). �
Si G es un subgrupo de Γ, donde Γ < PSL(2,C), entonces es evidenteque
L(G) ⊂ L(Γ),
ya que si un punto α es punto lımite de G, entonces se sigue directamentede la definicion, que α tambien lo es de Γ. Esta observacion prueba quetambien
O(Γ) ⊂ O(G),
lo cual implica el siguiente hecho fundamental: los subgrupos de los gruposdiscontinuos son tambien discontinuos. El siguiente resultado muestra quepara los subgrupos de ındice finito, las correspondientes particiones de laesfera de Riemann coinciden.
Teorema 3.1.4 Sean Γ < PSL(2,C) y G un subgrupo de ındice finito deΓ, entonces
L(G) = L(Γ).
Demostracion. El grupo Γ se puede descomponer en la union disjunta declases laterales derechas
Γ =m⋃j=1
G T j , T j ∈ Γ.
Si el punto α ∈ L(Γ), existen transformaciones distintas Sn ∈ Γ y z ∈ C,tales que Sn(z) → α; por lo que usando la descomposicion anterior, se puedeescribir
Sn = V n T jn , V n ∈ G, jn ∈ {1, 2, ...,m}.

92 CAPITULO 3. GRUPOS FUCHSIANOS
Se tiene entonces que necesariamente alguna T jn acontece un numero infinitode veces en la sucesion Sn, digamos T k. Seleccionando la correspondientesubsucesion infinita y renombrando se sigue que
Un T k(z) 7−→ α,
donde Un ∈ G. Escribiendo T k(z) = w, se tiene Un(w) → α y las trans-formaciones Un ∈ G son todas distintas. Por lo tanto α ∈ L(G). �
Una consecuencia inmediata del teorema anterior es que si un subgrupoΓ de transformaciones de Mobius en PSL(2,C) tiene como subgrupo deındice finito a un grupo discontinuo, entonces Γ es tambien discontinuo. Elsiguiente resultado, que sera de gran utilidad, muestra el comportamiento delos conjuntos lımite y ordinario bajo la conjugacion de un elemento que nopertenece al grupo.
Proposicion 3.1.5 Sean ϕ ∈ PSL(2,C) y Γ < PSL(2,C), entonces
O(ϕΓϕ−1) = ϕ(O(Γ)
).
Demostracion. Como ϕ es biyectiva, se tiene que(ϕ(O(Γ)
))c= ϕ
(L(Γ)
),
por lo que basta probar que
L(ϕΓϕ−1
)= ϕ
(L(Γ)
).
Para esto, sea ϕ(z) ∈ ϕ(L(Γ)
), por lo que existen T n ∈ Γ distintas y
w ∈ C, tales que T n(w) → z; se sigue entonces por continuidad que
ϕT n ϕ−1
(ϕ(w)
)7−→ ϕ(z).
Por consiguiente, ϕ(z) ∈ L(ϕΓϕ−1
). Viceversa, dado
ϕ(z) ∈ L(ϕΓϕ−1
),
existen ϕT n ϕ−1 distintas y w ∈ C, tales que ϕT n ϕ
−1(w) → ϕ(z). Por lotanto, T n
(ϕ−1(w)
)→ z y ϕ(z) ∈ ϕ
(L(Γ)
). �
Antes de mostrar unos ejemplos es conveniente probar el siguiente resul-tado, que relaciona puntos lımite con puntos fijos.

3.1. DISCONTINUIDAD 93
Lema 3.1.6 Sea T una transformacion en PSL(2,C), que no es elıptica
y que tampoco es la identidad, supongase tambien que existe w ∈ C y unasucesion creciente de naturales, nk, k ∈ N, tales que
Tnk
(w) 7−→ z0,
entonces z0 es un punto fijo.
Demostracion.Caso 1: T es parabolica.
Si T tiene su punto fijo finito α, tomando
ϕ(z) =1
z − α,
se tieneϕ T
n kϕ−1
(ϕ(z)
)= ϕ(z) + n k b, b ∈ C, b 6= 0.
Tambien,
ϕ Tnkϕ−1
(ϕ(w)
)7−→ ϕ(z0), cuando k →∞.
Por lo cual, ϕ(z0) = ∞ y z0 = α. Si T es una traslacion el resultado esinmediato.
Caso 2: T es hiperbolica o loxodromica.Si T tiene puntos fijos finitos α y β, tomando
ϕ(z) =z − β
z − α
(si α = ∞, se toma ϕ(z) = z − β), se tiene
ϕ Tn kϕ−1
(ϕ(z)
)= tn k ϕ(z), t ∈ C, |t| 6= 1, 0.
Ademas,ϕ T
nkϕ−1
(ϕ(w)
)7−→ ϕ(z0), cuando k →∞
Por lo cual ϕ(z0) = 0,∞ y z0 = α, β. �

94 CAPITULO 3. GRUPOS FUCHSIANOS
ejemplos
(1) Si un subgrupo Γ de PSL(2,C) es transitivo en la esfera de Riemann,es decir, cualesquiera dos puntos son Γ-equivalentes, entonces hay unasola orbita y el grupo Γ no es discontinuo, ya que ∀z ∈ C, la orbita dez se acumula en z. El grupo PSL(2,C) es evidentemente transitivo,puesto que cualquier punto se puede mandar a ∞ (de hecho es tran-sitivo en ternas, Teorema 1.2.5); por lo tanto no es discontinuo. Porotra parte, aunque el grupo PSL(2,R) ciertamente no es transitivo,tampoco es discontinuo (ejercicio).
(2) Si Γ es finito, se sigue directamente de la definicion que Γ es discontinuo
y que O(Γ) = C, ya que no hay sucesiones infinitas de elementosdistintos.
(3) Sea Γ cıclico, consideramos tres casos.
a) Γ cıclico finito. Como ya se mostro, Γ es necesariamente elıptico
y Γ es conjugado a un grupo de rotaciones generado por z → e2πipq z,
(p, q) = 1. Esto se sigue, ya que si T (z) = eiθz genera el grupo derotaciones y q es el menor entero positivo por el cual eiq θ = 1, entoncesq θ = 2πp, p ∈ Z. El subgrupo es entonces de orden q, ya que laeleccion de q implica (p, q) = 1.
b) Γ cıclico infinito elıptico. Al conjugar Γ a un subgrupo de rotacionesgenerado por T (z) = eiθz, se tiene que θ no es de la forma 2πt, t ∈ Q,ya que en este caso Γ serıa finito. Por lo cual ∀n,m ∈ Z, n 6= m, setiene que
ei n θ 6= ei m θ,
es decir, los numeros ei n θ, n ∈ Z, son todos distintos. Ahora, como ∂∆es compacto, estos numeros complejos tienen un punto de acumulacion,digamos eiψ; por lo cual existe una subsucesion mj, j ∈ N, crecientede naturales, o decreciente de enteros negativos, para los cuales
eimj θ 7−→ ei ψ, cuando j 7−→ ∞.
Finalmente, si S(z) = e−iψz, ∀ z ∈ C, se tiene
TmjS(z) = ei(mjθ−ψ)z → z,

3.1. DISCONTINUIDAD 95
cuando j →∞. Por lo cual, cualquier elemento en la esfera de Riemannes punto lımite y Γ no es discontinuo (∞ es evidentemente un puntolımite).
c) Γ cıclico no elıptico. Sea T el generador, notese que si Sn, n ∈ N,es una sucesion de transformaciones distintas de Γ, entonces existe unasubsucesion Snk
, de tal manera que son todas potencias positivas en
orden creciente de T (o de T−1
). Si T es parabolica, denotamos porα al punto fijo, y si T es hiperbolica o loxodromica, denotamos a lospuntos fijos por α y β. Evidentemente, en el primer caso α ∈ L(Γ),y en el segundo α, β ∈ L(Γ)). Ademas, si z0 ∈ L(Γ), se sigue de laobservacion anterior y del Lema 3.1.6 que z0 es un punto fijo de T ,por lo que L(Γ) = {α} en el caso parabolico, y L(Γ) = {α, β} en loscasos hiperbolico o loxodromico.
(4) El grupo clasico modular consiste en las matrices
SL(2,Z) =
{(a bc d
)∈ SL(2,R)
∣∣∣ a, b, c, d ∈ Z}.
El grupo de transformaciones que definen estas matrices, llamado tam-bien modular, se puede identificar con PSL(2,Z); esto se prueba dela misma manera como se mostro para PSL(2,C), o para PSL(2,R).Probaremos posteriormente que los puntos lımite bajo la accion de estegrupo son exactamente los puntos de la recta real extendida. Ahora,probamos que cualquier numero real y ∞ son puntos lımite.
Dado x ∈ R, existe una sucesion de racionales distintos bn/dn, n ∈ N,tales que bn/dn → x. Se puede suponer que (bn, dn) = 1, por lo queexisten an, cn ∈ Z, tales que andn − bncn = 1. Notese que las trans-formaciones
T n(z) =anz + bncnz + dn
son todas distintas y T n(0) = bn/dn → x, se tiene que x es un puntolımite. Tambien, la traslacion z → z+1 pertenece al grupo modular yTn(1) → ∞, cuando n → ∞, por lo que se tiene que ∞ es tambien
un punto lımite. En consecuencia, todos los puntos de la recta realextendida son puntos lımite del grupo modular.

96 CAPITULO 3. GRUPOS FUCHSIANOS
(5) Los subgrupos del grupo modular son muy importantes en la teorıa delos numeros, uno de ellos es el subgrupo principal de congruencias denivel N
Γ(N) =
{(a bc d
)∈ SL(2,Z)
∣∣∣ a, d ≡ 1 mod N, b, c ≡ 0 mod N
}.
Las matrices en Γ(N) forman en efecto un subgrupo, ya que
A =
(a bc d
)∈ Γ(N) ⇐⇒ A−1 =
(d −b−c a
)∈ Γ(N),
y tambien, si
A =
(a bc d
)y B =
(α βγ δ
)son matrices en Γ(N), entonces
AB =
(aα+ bγ aβ + bδcα + dγ cβ + dδ
)≡
(1 00 1
)mod N y AB ∈ Γ(N).
Observese tambien que estos subgrupos Γ(N) son de orden infinito(ejercicio). Al correspondiente grupo de transformaciones se le denotapor Γ(N).
Proposicion 3.1.7 Γ(N) es un subgrupo normal de ındice finito de SL(2,Z).
Demostracion. Sean(a bc d
)∈ SL(2,Z) y
(α βγ δ
)∈ Γ(N),
entonces(a bc d
) (α βγ δ
) (d −b−c a
)=
(aα+ bγ aβ + bδcα + dγ cβ + dδ
) (d −b−c a
)
≡(ad− bc −ab+ abcd− cd −cb+ ad
)mod N,
puesto que α, δ ≡ 1 mod N y β, γ ≡ 0 mod N. Por lo tanto Γ(N) esnormal en SL(2,Z).

3.1. DISCONTINUIDAD 97
Para probar que el ındice de Γ(N) en SL(2,Z) es finito, usamos el grupoSL(2,ZN) definido por las matrices de 2 × 2 con entradas en el anillo ZN
y determinante 1. SL(2,ZN) es en efecto un grupo, ya que la propiedaddet(AB) = det(A) det(B) es tambien valida para matrices con entradasen cualquier anillo conmutativo con unidad, puesto que solo depende de lamultilinealidad (cf. [8] p. 196).
Notese que SL(2,ZN) es un grupo finito. Ahora, se puede definir unhomomorfismo de grupos ψ : SL(2,Z) → SL(2,ZN), dado por(
a bc d
)7−→
(a b
c d
),
donde la barra denota la clase en ZN del numero en cuestion. Esta funciones un homomorfismo, ya que por definicion
aα+ bγ = aα+ b γ ∀ a, b, α, γ ∈ Z.
Finalmente, como el nucleo de la funcion ψ es precisamente Γ(N), lasucesion
Γ(N)i−→ SL(2,Z)
ψ−→ ψ(SL(2,Z))
es exacta. Por lo tanto SL(2,Z)/Γ(N) es isomorfo a un grupo finito y elındice es finito. De hecho, se puede probar que ψ es un epimorfismo sobreSL(2,ZN), por lo que la sucesion
Γ(N) −→ SL(2,Z) −→ SL(2,ZN)
es exacta (cf. [21]). Observese tambien que el argumento anterior exhibeuna segunda prueba de que Γ(N) es normal, al ser este el nucleo de unhomomorfismo �
Observese que si Γ es un subgrupo de matrices de SL(2,C), G < Γy T, S son matrices en Γ que pertenecen a la misma clase lateral derecha(o izquierda) con respecto a G, entonces T , S tambien estan en la mismaclase lateral derecha (o izquierda) con respecto a G. Para las clases lateralesderechas, esto se sigue ya que si T ∈ GS, entonces T S−1 ∈ G, y tambien
T S−1 ∈ G. El caso de las clases laterales izquierdas se prueba de manera
analoga.Sin embargo, el recıproco no siempre es cierto, por ejemplo, si N > 2,(
−1 00 −1
)/∈ Γ(N),

98 CAPITULO 3. GRUPOS FUCHSIANOS
pero la transformacion identica sı esta en Γ(N). En general, se tiene que
2 [Γ, G] = [Γ, G] o [Γ, G] = [Γ, G].
Esto se debe a que la clase de una matriz T ∈ SL(2,C) puede ser distinta a lade −T, pero ambas son la misma al proyectarse al grupo de transformaciones;dejamos la verificacion de los detalles como ejercicio. En particular, paraN > 2, se tiene que 2[PSL(2, Z),Γ(N)] = [SL(2,Z), Γ(N)]. Se sigue deestas observaciones que la Proposicion 3.1.7 tambien es valida para los corres-pondientes grupos de transformaciones. Se define ahora la convergencia dematrices.
Definicion 23 Sean
Tn =
(an bncn dn
), n ∈ N, T =
(a bc d
)matrices en SL(2,C), (o en GL(2,C)), se dice que Tn → T, si an → a,bn → b, cn → c y dn → d, cuando n→∞.
El siguiente resultado muestra que el producto de matrices induce una funcioncontinua, por lo que los grupos SL(2,C) y GL(2,C) son grupos topologicos.Mas aun, los grupos SL(N,C) y GL(N,C) son grupos de Lie, debido a lacompatibilidad de estas operaciones con su estructura de variedades diferen-ciables (cf. [24]).
Lema 3.1.8 Sean A, B, An, Bn, n ∈ N, matrices en SL(2,C) (o enGL(2,C)), tales que An → A, Bn → B, cuando n→∞, entonces
AnBn → AB.
Demostracion. Si
An =
(an bncn dn
), Bn =
(αn βnγn δn
), A =
(a bc d
)y B =
(α βγ δ
),
entonces
AnBn =
(anαn + bnγn anβn + bnδncnαn + dnγn cnβn + dnδn
)y
AnBn 7−→(aα+ bγ aβ + bδcα + dγ cβ + dδ
)= AB.
�

3.1. DISCONTINUIDAD 99
A continuacion se muestra que los grupos de matrices que definen gruposdiscontinuos no pueden tener sucesiones convergentes.
Lema 3.1.9 Sean T y Tn, n ∈ N, matrices en SL(2,C), tales que Tn → T,entonces
T n(z) 7−→ T (z) ∀z ∈ C.
Demostracion. Se sigue del Lema 3.1.8 que T−1Tn → T −1T = Id. Por locual, si
T −1Tn =
(αn βnγn δn
),
se tiene que ∀z ∈ Cαnz + βnγnz + δn
7−→ 1z + 0
0z + 1= z.
Esto se debe, ya que para z fijo finito, si n es suficientemente grande, z esdistinta de −δn/γn, donde γn 6= 0. Tambien, si z = ∞, se tiene que
T−1T n(∞) = αn/γn 7−→ ∞,
si γn 6= 0, y T−1T n(∞) = ∞, si γn = 0. Por consiguiente,
T−1T n(z) 7−→ z ∀z ∈ C y T n(z) 7−→ T (z) ∀z ∈ C.
�
Para terminar esta seccion mostramos que los grupos discontinuos son alo sumo numerables.
Lema 3.1.10 Sea M un subconjunto no numerable de Rn, entonces existeun punto en Rn que es punto de acumulacion de M.
Demostracion. Supongamos que el conjunto M no se acumula en ningunpunto. Sean
xj, j ∈ I,los elementos de M, entonces para toda xj existe δj, tal que
B(xj, δj) ={y ∈ Rn
∣∣ |y − xj| < δj}
intersecta a M solamente en xj. Ahora, se puede tomar yj ∈ B(xj, δj/2), talque yj tiene coordenadas racionales. Finalmente, esto implica que hay unabiyeccion entre las xj y las yj, lo cual contradice que M es no numerable.
�

100 CAPITULO 3. GRUPOS FUCHSIANOS
Teorema 3.1.11 Un grupo discontinuo en PSL(2,C) es a lo sumo nume-rable.
Demostracion. Sea Γ un grupo discontinuo en PSL(2,C) y Γ un grupopreimagen de Γ en SL(2,C). A cada matriz(
a bc d
)∈ Γ
le podemos asociar (a, b, c, d) ∈ C 4, denotamos por M al subconjunto deC 4 asociado a Γ. Afirmamos que M es a lo sumo numerable, de otra manerapor el Lema 3.1.10, existen (an, bn, cn, dn) ∈M, n ∈ N, distintos, tales que
(an, bn, cn, dn) 7−→ (a, b, c, d), cuando n→∞.
Como el determinante es una funcion continua, se sigue que ad− bc = 1.Ahora, escribiendo
T n(z) =anz + bncnz + dn
y T (z) =az + b
cz + d,
se tiene entonces por el Lema 3.1.9 que
T n(z) 7−→ T (z) ∀z ∈ C
y L(Γ) = C, contradiciendo que Γ es discontinuo. Para asegurar que lastransformaciones definidas por los vectores (an, bn, cn, dn), n ∈ N, son enefecto distintas, si n es suficientemente grande, se puede tomar vecindadesajenas y simetricas de los puntos (a, b, c, d) y (−a,−b,−c,−d), respectiva-mente. �
EJERCICIOS 3.1
1. Demuestre que la propiedad de conmutar y la de fijar los mismos puntoses invariante bajo conjugacion en PSL(2,C).
2. Demuestre que si dos transformaciones no parabolicas tienen exactamenteun punto fijo en comun α, entonces el conmutador es parabolico y fija α.
3. Exhiba un ejemplo de un punto lımite que no sea un punto de acumulaciony que tampoco sea el punto fijo de una transformacion de orden infinito.
4. Demuestre que PSL(2,R) no es discontinuo.

3.2. GRUPOS DISCRETOS. 101
5. Demuestre directamente, sin usar el grupo modular, que el grupo Γ(N)es de orden infinito.
6. Demuestre que si G < Γ son grupos de matrices en SL(2,C), entonces2 [Γ, G] = [Γ, G] o [Γ, G] = [Γ, G].
3.2. Grupos Discretos.
Definicion 24 Sea Γ < SL(2,C), se dice que Γ es discreto si no existeuna sucesion de matrices distintas, Tn ∈ Γ, n ∈ N, tal que Tn → T, cuandon→∞, donde T es una matriz de 2× 2 con entradas complejas.
Observese que si Tn, n ∈ N, son matrices en SL(2,C), tales que Tn → T,entonces como el determinante es una funcion continua T ∈ SL(2,C). Elgrupo modular y todos sus subgrupos son discretos, ya que al tener entradasenteras, las matrices no pueden acumularse. Esto se verifica facilmente alidentificar las matrices en SL(2,Z) con puntos de C 4.
Identificando a las matrices en SL(2,C) con puntos de C 4, se define sunorma de manera natural, a saber, si
T =
(a bc d
)∈ SL(2,C), entonces ||T || =
√|a|2 + |b|2 + |c|2 + |d|2.
Como un conjunto infinito en un compacto necesariamente tiene un puntode acumulacion, es claro que el conjunto de normas de las matrices en ungrupo discreto infinito de SL(2,C) no pueden estar acotadas. En particular,alguna de las cuatro entradas de estas matrices forma un conjunto no acotadode numeros complejos. Notese tambien, que en virtud del Lema 3.1.8, si ungrupo es discreto, entonces cualquier grupo conjugado a el tambien lo es.
Definicion 25 Se dice que un subgrupo Γ de PSL(2,C) es discreto, siesta determinado por un subgrupo discreto Γ de SL(2,C).
Esta definicion es consistente puesto que no depende de la eleccion de Γ(ejercicio). El siguiente resultado muestra que para detectar si un grupo esdiscreto o no lo es, basta verificar el comportamiento cerca de la identidad.
Lema 3.2.1 Un subgrupo Γ de SL(2,C) es discreto si y solo si no existeuna sucesion Tn ∈ Γ, n ∈ N, de matrices distintas, tales que Tn → Id.
102 CAPITULO 3. GRUPOS FUCHSIANOS
Demostracion. Basta probar la suficiencia. Si Γ no es discreto, existenmatrices Sn ∈ Γ, n ∈ N, distintas, tales que Sn → S. Se sigue tambienentonces del Lema 3.1.8 que
Sn+1 S−1n 7−→ S S −1 = I.
Finalmente, si Sn+1S−1n , n ∈ N, es un conjunto finito de matrices, se tiene
que ∀ n > N, Sn+1 S−1n = Id, lo cual contradice que las matrices Sn sean
distintas. Por consiguiente, dicha sucesion es infinita y se puede tomar unasubsucesion convergente, lo que contradice la hipotesis. �
Teorema 3.2.2 Sea Γ < PSL(2,C) discontinuo, entonces Γ es discreto.
Demostracion. Si Γ, un subgrupo preimagen de Γ, no es discreto, por ellema anterior existen matrices distintas Tn en Γ, tales que Tn → I, lo cualimplica que T n(z) → z ∀z ∈ C y Γ no serıa discontinuo. �
El teorema anterior es tambien consecuencia directa del Lema 3.1.9. Estelema implica que si un grupo no es discreto, entonces todos los puntos sonpuntos lımite. Recordamos que PSL(2,R) es transitivo en puntos de H2,ya que usando traslaciones y homotecias cualquier z ∈ H2 se puede enviaral punto i.
Teorema 3.2.3 Sea Γ < PSL(2,R) discreto, entonces Γ es discontinuo.
Demostracion. Probamos que bajo estas hipotesis los puntos del semiespa-cio superior son ordinarios. Suponiendo que esto no se cumple, existe entoncesun punto z0 ∈ H2 ∩ L(Γ) y transformaciones T n ∈ Γ, n ∈ N, distintas, talesque T n(z) → z0, donde z ∈ H2. Esto ultimo se sigue, ya que Γ < PSL(2,R).
Tomando S ∈ PSL(2,R), tal que S(i) = z, se tiene T n S(i) → z0 y
S−1T n S(i) 7−→ S
−1(z0).
Ahora, el grupo Γ esta determinado por un grupo de matrices Γ en SL(2,R),denotamos
S −1 Tn S =
(an bncn dn
),
donde las matrices S ∈ SL(2,R) y Tn ∈ Γ definen S y T n, respectiva-mente.

3.2. GRUPOS DISCRETOS. 103
Bajo estas hipotesis, se tiene
Im(S−1T n S(i)
)= Im
(ani+ bncni+ dn
)
= Im
((ani+ bn)(−cni+ dn)
c2n + d2n
)=
1
c2n + d2n
,
y tambien ∣∣S−1T n S(i)
∣∣ 2=
a2n + b2nc2n + d2
n
.
Por consiguiente
1
c2n + d2n
7−→ Im(S−1
(z0))> 0
ya2n + b2nc2n + d2
n
7−→∣∣S −1
(z0)∣∣2 > 0.
Se sigue entonces que las sucesiones {cn} y {dn} estan acotadas superior-mente. Tambien, las sucesiones {an}, {bn} estan acotadas superiormente,puesto que existe un real positivo k, tal que
a2n + b2nk
≤ a2n + b2nc2n + d2
n
.
Esto contradice la hipotesis del teorema, ya que se podrıa tomar unasubsucesion convergente de (
an bncn dn
)y el grupo S−1 ΓS no serıa discreto, y por ende el grupo Γ tampoco. Por lotanto, los puntos del semiplano superior son ordinarios y Γ es discontinuo.
�
Corolario 3.2.4 Sea Γ < SL(2,R) discreto, entonces L(Γ) ⊂ R.
Demostracion. Un argumento similar al de la prueba del teorema anteriormuestra que los puntos del semiplano inferior son tambien ordinarios . �

104 CAPITULO 3. GRUPOS FUCHSIANOS
Los subgrupos discretos de PSL(2,C), llamados kleinianos, no siempre
son discontinuos en C. Por ejemplo, el grupo de Picard determinado por lasmatrices {(
a bc d
)∈ SL(2,C)
∣∣∣ a, b, c, d son enteros Gaussianos
}es evidentemente discreto, pero no es discontinuo (cf. [2] p. 96). Los enterosGaussianos son los complejos de la forma a + ib, a, b ∈ Z. Notese que estosnumeros forman un anillo conmutativo con unidad y que el grupo de Picardes en efecto un subgrupo de PSL(2,C), que ademas contiene como subgrupoal grupo clasico modular.
Aunque este grupo de Picard no es discontinuo en la esfera de Riemann,la accion de su extension de Poincare en H3 sı lo es. Esta ultima afirmacionla cumplen todos los grupos kleinianos (cf. [2] p. 95).
Definicion 26 Sea G un grupo actuando en un espacio metrico X y Y unsubespacio invariante bajo G de X, se dice que G actua discontinuamenteen Y, si dado cualquier compacto K ⊂ Y, se tiene que
g(K) ∩ K 6= ∅
solamente para un numero finito de transformaciones en G.
Esta propiedad, que es invariante bajo conjugacion con un homeomorfis-mo (ejercicio), la satisface el conjunto ordinario de un grupo discontinuo (cf.[2] p. 99). Lo cual muestra la similitud de los conceptos de accion discon-tinua y grupo discontinuo. Primero, observese que si Γ es un subgrupo dePSL(2,C) que actua en un subdominio M de la esfera de Riemann y Mintersecta al conjunto lımite de Γ, entonces Γ no actua discontinuamenteen M (ejercicio). Ahora, un sencillo calculo muestra que si T ∈ PSL(2,R),entonces
2 cos h ρ(i, T (i)
)= ||T ||2, (3.1)
donde T es una matriz en SL(2,R) que representa a T . Dejamos la verifi-cacion de este sorprendente resultado como ejercicio para el lector. La relacion(3.1) es muy util para diversas aplicaciones; mas aun, reemplazando i porel cuaternio j = (0, 0, 1), y T por su extension de Poincare, dicha formulatambien es cierta para funciones en PSL(2,C). Vease [2] pp. 61 y 62.
Usando la identidad (3.1) no es difıcil probar que si Γ es un grupo dis-creto de PSL(2,R), entonces Γ actua discontinuamente en H2 (ejercicio).

3.2. GRUPOS DISCRETOS. 105
De hecho, estos argumentos se aplican de manera identica en el caso tridi-mensional, por lo que las extensiones de Poincare de los subgrupos discretosde PSL(2,C) actuan discontinuamente en H3.
Recordemos que M(∆) es el subgrupo de PSL(2,C) que preserva eldisco de Poincare. Observese que si Γ es un subgrupo discreto de M(∆),entonces L(Γ) ⊂ ∂∆. Esto se sigue ya que en virtud de la Proposicion 3.1.5,si
f(z) =z − i
z + i,
se tiene que f−1
Γ f es un subgrupo de PSL(2,R) y
f−1
(L(Γ)) = L(f−1
Γ f).
A continuacion describimos los grupos estabilizadores, ası como los gruposabelianos discretos.
Definicion 27 Dado Γ < PSL(2,C) y z ∈ C, se define el subgrupo esta-bilizador de z, denotado por Γz, como
{T ∈ Γ | T (z) = z}.
Evidentemente Γz es un subgrupo de Γ. Tambien, estos subgrupos se rela-cionan bajo la conjugacion, como lo muestra el siguiente resultado.
Proposicion 3.2.5 Sean Γ un subgrupo en PSL(2,C) y T cualquier trans-formacion en PSL(2,C), entonces
ΓT (z) = T Γz T−1.
Demostracion. Se tiene que
S ∈ ΓT (z) ⇐⇒ S(T (z)
)= T (z) ⇐⇒ T
−1S T (z) = z
⇐⇒ T−1S T ∈ Γz ⇐⇒ S ∈ T Γz T
−1.
�
Teorema 3.2.6 Sea Γ un subgrupo discreto abeliano de PSL(2,R), en-tonces Γ es cıclico.

106 CAPITULO 3. GRUPOS FUCHSIANOS
Demostracion. Como Γ es abeliano, se sigue del Teorema 3.1.2 que todaslas transformaciones de Γ fijan los mismos puntos. Si Γ fija dos puntos,entonces Γ es puramente hiperbolico o puramente elıptico, ya que en uncaso los puntos fijos son reales y en el otro no.
Caso 1: Γ es puramente parabolico.
Como las propiedades de conmutar o de ser discreto son invariantes bajoconjugacion, podemos suponer que Γ es un grupo de traslaciones
Γ = { T∣∣ T (z) = z + λ, λ ∈M ⊂ R}.
El conjunto M tiene un elemento positivo mınimo µ. De otra manera, siexiste una sucesion µn ≥ 0, n ∈ N, tal que µn → 0, al tomar un subgrupopreimagen de matrices Γ en SL(2,R), se tendrıa(
1 µn0 1
)7−→
(1 00 1
)y Γ no serıa discreto.
Ahora, se afirma que
M = {nµ, n ∈ Z},
lo cual probarıa que Γ =< z → z + µ > . La afirmacion se deriva, yaque dada λ ∈ M, se tiene que λ = q µ + r, donde 0 ≤ r < µ, q ∈ Z ynecesariamente r = 0. En caso contrario, si r > 0, se tendrıa
T λ
(T−1
µ
)q(z) = z + r,
donde T λ(z) = z + λ y T µ(z) = z + µ, sin embargo esto contradice que µes el menor elemento positivo en M.
Caso 2: Γ es puramente hiperbolico.
Conjugando, se puede suponer que Γ es un grupo de homotecias
Γ = { T∣∣ T (z) = k z, k ∈M ⊂ R+}.
Ahora, M no contiene una sucesion kn , n ∈ N, tal que kn → 1, ya que ental caso (√
kn 00 1/
√kn
)7−→
(1 00 1
)

3.2. GRUPOS DISCRETOS. 107
y Γ no serıa discreto. Por consiguiente, podemos tomar µ ∈ M, µ > 1, talque ∀ λ ∈M, λ > 1, se tiene λ ≥ µ. Afirmamos que
M = { µn | n ∈ Z },
lo cual prueba este caso.Para probar la afirmacion sea λ ∈M, λ > 1, entonces existe n ∈ N, tal
que µn ≤ λ < µn+1. Si la primera desigualdad es estricta se tendrıa
1 <λ
µn< µ,
lo cual contradice la eleccion de µ, al tomar la transformacion
T λ T−nµ (z) = λµ−nz,
donde T λ(z) = λ z y T µ(z) = µ z. El caso λ < 1 se prueba usando 1/λ.
Caso 3: Γ es puramente elıptico.
Conjugando, se puede suponer que Γ es un grupo de rotaciones en M(∆)
Γ = { T∣∣ T (z) = eiθ z, θ ∈M ⊂ R}.
En este caso no existe una sucesion θn ∈ M, tal que θn → 0, ya que setendrıa e i θn
2 0
0 e−i θn
2
7−→(
1 00 1
)y Γ no serıa discreto.
Finalmente, sea θ el menor elemento positivo de M, se afirma que
M = { θ n, n ∈ Z} ,
lo cual prueba el resultado. Para esto, sea ϕ ∈ M, entonces existe n ∈ Z,tal que n θ ≤ ϕ < (n+ 1) θ. Si n θ < ϕ, tomando
Tϕ T−nθ (z) = e i (ϕ−n θ) z,
donde Tϕ (z) = e i ϕ z y T θ(z) = e i θ z, se tendrıa 0 < ϕ− n θ < θ y θ noserıa el menor elemento positivo en M. �
El teorema anterior no es valido en PSL(2,C), ya que existen subgruposdiscretos, abelianos y no cıclicos de PSL(2,C) (ejercicio). Una descripcion

108 CAPITULO 3. GRUPOS FUCHSIANOS
completa de estos grupos se puede deducir de la generalizacion del Teorema3.1.2 a transformaciones en PSL(2,C) (cf. [2] pp. 69, 84-89). El siguiente re-sultado muestra que el Teorema 3.2.6 tampoco es cierto para grupos abelianosdiscretos de matrices en SL(2,R).
Proposicion 3.2.7 El grupo generado por las matrices(−1 00 −1
),
(1 10 1
)es abeliano pero no es cıclico.
Demostracion. Sea Γ el grupo generado por estas matrices. Observeseprimero que como la matriz
S =
(−1 00 −1
)es escalar, entonces commuta con cualquier otra matriz y por consiguiente Γes abeliano. Ademas, se sigue de este hecho que cualquier matriz en el grupoΓ es de la forma ± T n, n ∈ Z, donde
T =
(1 10 1
).
Ahora, evidentemente los unicos posibles generadores de Γ son ± T o± T −1. Sin embargo, los grupos cıclicos generados por estas matrices nocontienen a la matriz S. Esto se sigue, ya que si U denota T,−T, T −1, o−T −1 y n ∈ Z, n 6= 0, entonces
Un(z) = z ± n,
por lo que Un 6= I, S. �
Las transformaciones hiperbolicas y loxodromicas juegan un papel espe-cial en los grupos discretos. Recordemos que F T denota los puntos fijos de
una transformacion T ∈ PSL(2,C) en la esfera de Riemann C.
Teorema 3.2.8 Sean T y S funciones de un subgrupo Γ en PSL(2,C),tal que T es hiperbolica o loxodromica, supongase tambien que F S ∩ F T
consiste en exactamente en punto, entonces Γ no es discreto.

3.2. GRUPOS DISCRETOS. 109
Demostracion. Como las propiedades de las hipotesis y de la conclusiondel teorema son invariantes bajo conjugacion, se puede suponer que
F T = {0,∞} y F S ∩ F T = {∞}.
Ahora, las transformaciones T y S estan definidas por matrices en SL(2,C)de la forma
T =
(k 00 1/k
), S =
(a b0 a−1
),
donde b es distinto de 0 y |k| 6= 1.Calculamos
ST nS−1T−n =
(a b0 a−1
) (kn 00 1/kn
) (a−1 −b0 a
) (1/kn 0
0 kn
)
=
(akn b/kn
0 a−1/kn
) (a−1/kn −bkn
0 akn
)=
(1 ab(1− k2n)0 1
).
Reemplazando T−1 por T si es necesario, se puede suponer que |k| < 1.Por consiguiente, si n→∞
ST nS−1T−n 7−→(
1 ab0 1
).
Finalmente, como ab 6= 0 y las potencias de k son distintas, se sigue que
las transformaciones S TnS−1T−n
son tambien distintas y por lo tanto Γno es discreto. �
Observese que el teorema anterior implica que en un grupo discreto unpunto fijo de una transformacion hiperbolica (o loxodromica) no es un puntofijo de una parabolica y que los puntos fijos de dos transformaciones hiperboli-cas o loxodromicas son iguales o disjuntos. En el siguiente resultado se de-scriben los grupos estabilizadores de PSL(2,R).
Teorema 3.2.9 Sea Γ un subgrupo de PSL(2,R) discreto. Entonces:
(i) si z ∈ R, Γz es la identidad o cıclico infinito;
(ii) si z ∈ H2, Γz es la identidad o cıclico finito.
Demostracion. En el caso (ii), Γz consiste en funciones elıpticas que noson de orden infinito, ya que Γ es discreto, y por lo tanto los puntos que noson reales son ordinarios. Ahora, se sigue de la ecuacion de los puntos fijos
110 CAPITULO 3. GRUPOS FUCHSIANOS
que todas las transformaciones en Γz fijan tambien z. Por consiguiente, estegrupo es abeliano y se sigue del Teorema 3.2.6 que tambien es cıclico.
En el caso (i), si z es un punto fijo de una transformacion parabolica, sesigue del Teorema 3.2.8 que Γz consiste en elementos parabolicos que fijanz, por lo cual Γz es abeliano y cıclico. Estos mismos argumentos se aplicanal caso hiperbolico. �
Observese que el teorema anterior es falso para subgrupos de PSL(2,C).Probaremos que si Γ es un subgrupo discreto de PSL(2,R), entonces L(Γ)consiste en 0, 1 o 2 puntos, o es un conjunto perfecto. Este sorprendenteresultado tambien es cierto para subgrupos de PSL(2,C).
Proposicion 3.2.10 Sea Γ un subgrupo estabilizador discreto de PSL(2,R),entonces L(Γ) tiene a lo mas dos puntos.
Demostracion. Sea Γ = Γz. Si z ∈ H2, se sigue del Teorema 3.2.9 queeste grupo es cıclico elıptico y finito, por lo que L(Γ) = ∅.
Si z ∈ R, se sigue del Teorema 3.2.9, que Γ es cıclico infinito. Mas aun,en virtud del Lema 3.1.6, se tiene que L(Γ) consiste en uno o dos puntos,dependiendo si el generador es parabolico o hiperbolico. �
Definicion 28 Un grupo fuchsiano es un subgrupo discreto de PSL(2,C)que preserva un “disco”, es decir, es un grupo que es conjugado a un subgrupodiscreto de PSL(2,R).
La Proposicion 3.2.10 no se cumple si Γ no es discreto, por ejemplo,si T es elıptica de orden infinito con puntos fijos z, w y Γ =< T >, setiene Γ = Γz y L(Γ) = C. Observese que la Proposicion 3.2.9 muestraque los subgrupos estabilizadores de los grupos fuchsianos son cıclicos. Porotra parte, el siguiente resultado muestra que si el conjunto lımite de unsubgrupo de PSL(2,R) consiste en un solo punto, entonces se trata de ungrupo estabilizador.
Proposicion 3.2.11 Sea Γ < PSL(2,R), tal que L(Γ) = {z0}, entoncesΓ es cıclico parabolico.
Demostracion. Sean T n, n ∈ N, transformaciones distintas en Γ, yz ∈ C, tal que T n(z) → z0. Se tiene entonces que si T ∈ Γ, entonces

3.2. GRUPOS DISCRETOS. 111
T (z0) = z0, de otra manera T T n(z) → T (z0) y T (z0) serıa otro puntolımite. Por lo que
Γ = Γz0 .
Ahora, como z0 es el unico punto lımite, el grupo Γ no contiene hiperboli-cas y por lo tanto es puramente parabolico. Finalmente, como Γ es discon-tinuo, tambien es discreto y por lo tanto es cıclico (ya que es abeliano). �
La Proposicion 3.2.11 no se cumple para subgrupos de PSL(2,C), sinembargo, bajo las hipotesis de este teorema, estos grupos son necesariamentediscretos, pero pueden tener elıpticas, y el subgrupo de parabolicas puede serdoblemente periodico (cf. [2] p. 89).
Definicion 29 Se dice que un subgrupo Γ de PSL(2,R) es horocıclico, ode la primera clase, si
L(Γ) = R.
La definicion anterior se extiende de manera natural a grupos fuchsianos.Probaremos posteriormente que los subgrupos normales de los grupos horocı-clicos son tambien horocıclicos, ahora probamos unos casos particulares deeste hecho.
Lema 3.2.12 Sea Γ fuchsiano infinito, entonces L(Γ) 6= ∅.
Demostracion. Sin perdida de generalidad Γ < M(∆). Como Γ es dis-creto, Γ es numerable, por lo que existe z0 ∈ ∆, tal que z0 no es un puntofijo. Se sigue entonces que Γ(z0) es un conjunto infinito en ∆, y como ∆es compacto, necesariamente Γ(z0) tiene un punto de acumulacion en ∂(∆).Por consiguiente, L(Γ) 6= ∅. �
Proposicion 3.2.13 Sea Γ un subgrupo normal de un grupo horocıclico G,entonces L(Γ) 6= ∅
Demostracion. Si L(Γ) = ∅, se sigue del lema anterior que Γ es finito yesto implica que el ındice [G,Γ] es infinito. Ahora, si T ∈ Γ es distinta de laidentidad, se tiene entonces que T es necesariamente elıptica y que si z0 esun punto fijo de T , entonces [G,Gz0 ] = ∞ (ya que Gz0 tambien es finito).
Finalmente, si Sj, j ∈ N, denotan representantes de las clases lateralesderechas de Gz0 en G, se sigue que Si(z0) 6= Sj(z0), si i 6= j. Por lo cual
SjT S−1
j , j ∈ N,
112 CAPITULO 3. GRUPOS FUCHSIANOS
es una coleccion infinita de transformaciones distintas en Γ (ya que suspuntos fijos estan dados por la coleccion Sj(z0), j ∈ N). Esta contradiccionimplica que Γ debe ser de orden infinito y por ende el resultado.
�
Usando los resultados anteriores se puede refinar un poco mas la ultimaproposicion.
Proposicion 3.2.14 Sea Γ un subgrupo normal de un subgrupo horocıclicoG, entonces el conjunto lımite L(Γ) consiste de mas de un punto.
Demostracion. Si L(Γ) = {z0}, se sigue de la Proposicion 3.2.11 que Γ esun grupo estabilizador cıclico parabolico. Ahora, la Proposicion 3.2.10 implicaque no toda transformacion en G fija z0, ya que este grupo es horocıclico.Sea T ∈ G, tal que T (z0) 6= z0 y S el generador de Γ, se tiene entonces
que la funcion T S T−1
pertenece al grupo Γ. Sin embargo, el punto fijo de
T S T−1
es T (z0), lo cual contradice que Γ es un grupo estabilizador. Porconsiguiente, la cardinalidad de L(Γ) es mayor a uno. �
Definicion 30 Se dice que Γ < PSL(2,C) es elemental, si L(Γ) tiene a lomas 2 puntos, en caso contrario se dice que es no elemental.
Notese que los grupos elementales son necesariamente discretos, ya que enlos grupos no discretos todos los puntos de la esfera de Riemann son puntoslımite.
Definicion 31 Sea G un grupo abstracto y Γ un subconjunto de G, sedefine el normalizador de Γ en G, denotado por NG(Γ), como el subgrupo
{g ∈ G | gΓg−1 = Γ}.
Es facil probar que NG(Γ) es en efecto un subgrupo de G, observese que
NG(Γ) = {g ∈ G | gΓ = Γg}.
En particular, si Γ es un subgrupo discreto de PSL(2,R) y T es unatransformacion en Γ con punto fijo z (o con puntos fijos z, w), entonces elnormalizador de T en Γ es precisamente el subgrupo cıclico Γz.

3.2. GRUPOS DISCRETOS. 113
Proposicion 3.2.15 Sea T una transformacion parabolica o elıptica en ungrupo fuchsiano G, entonces si Γ =< T >, se tiene que
NG (Γ) = K,
donde K es el mayor grupo cıclico en G que contiene a T .
Demostracion.Caso 1: T parabolica, con punto fijo z0.
Si S ∈ NG(Γ), entonces S TnS−1
= Tm
y S(z0) = z0. Por ser Gdiscreto, S es parabolica y es claro que NG (Γ) = Gz0 . Observese que nonecesariamente Gz0 = Γ, por ejemplo, si V ∈ G esta dada por V (z) = z+1,y T (z) = z + 2.
Caso 2: T elıptica, T (z0) = z0, z0 ∈ H2.
Si S ∈ NG (Γ), entonces S TnS−1
= Tm
y como S ∈ PSL(2,R), setiene S(z0) = z0. En consecuencia, NG (Γ) consiste en todas las transfor-maciones elıpticas en G que fijan z0 y z0, es decir, NG (Γ) = Gz0 . �
Para analizar el caso hiperbolico se necesita un resultado de la teorıabasica de grupos.
Lema 3.2.16 Sea Γ un subconjunto de un subgrupo G de un grupo abstractoK y ϕ ∈ K, entonces
ϕNG(Γ)ϕ−1 = NϕGϕ−1(ϕΓϕ−1).
Demostracion. Se tiene que
ϕf ϕ−1 ∈ ϕNG(Γ)ϕ−1 ⇐⇒ f ∈ NG(Γ)
⇐⇒ ϕf ϕ−1(ϕΓϕ−1)(ϕf ϕ−1)−1 = ϕΓϕ−1
⇐⇒ ϕf ϕ−1 ∈ NϕGϕ−1(ϕΓϕ−1).
Si g ∈ NϕGϕ−1(ϕΓϕ−1), tomando f = ϕ−1gϕ se tiene g = ϕf ϕ−1. �
Proposicion 3.2.17 Sea T una transformacion hiperbolica en un grupofuchsiano G, supongase tambien que los puntos fijos de T son α, β, y queΓ =< T > . Entonces:
(i) NG (Γ) = Γα, si G no contiene elementos de orden 2 que intercambianα y β;
(ii) NG (Γ) =< Γα, S >, si existe S ∈ G, tal que S(α) = β.

114 CAPITULO 3. GRUPOS FUCHSIANOS
Demostracion. Usando la Proposicion 3.2.16, podemos suponer que Tfija 0 e ∞, por lo que T (z) = kz, k ∈ R+, k 6= 1.
Si ϕ ∈ NG (Γ), entonces ϕTnϕ−1 = T
my ϕ preserva {0,∞}. Por lo
tanto, si G no contiene elementos elıpticos de orden 2, que intercambien 0e ∞, se tiene (de manera similar a los casos parabolico y elıptico)
NG (Γ) = G0,
ya que todos los elementos de G que fijan 0, tambien fijan ∞ (en virtuddel Teorema 3.2.8).
En contraste, si el grupo G contiene una transformacion elıptica de orden2, S, tal que S(0) = ∞, entonces como S es una involucion de la formaz → α/z, se sigue que
S TnS−1
(z) = S Tn(αz
)= S
(knα
z
)=
z
kn= T
−n(z),
y se tiene que la transformacion S pertenece tambien al grupo normalizadorNG (Γ). Finalmente, si S1 y S2 intercambian 0 e ∞, entonces S1S2 losfija, en consecuencia
NG (Γ) =< G0, S > .
�
Observese que en el segundo caso de la proposicion anterior, se tieneque el subgrupo normalizador NG (Γ) tiene como subgrupo de ındice 2 algrupo estabilizador Sα. Probamos ahora que los subgrupos no elementalesde PSL(2,R), que ademas son puramente hiperbolicos, son necesariamentediscretos.
Lema 3.2.18 Sea Γ < PSL(2,R) puramente hiperbolico, tal que
T =
(λ 00 λ−1
)∈ Γ < SL(2,R),
λ > 0, λ 6= 1. Supongase tambien que existe una sucesion de matrices dis-tintas Tn ∈ Γ, tal que Tn → Id, entonces
Tn =
(ρn 00 ρ−1
n
), si n > N, ρ2
n 6= 1.

3.2. GRUPOS DISCRETOS. 115
Demostracion. Denotamos a las matrices Tn por(an bncn dn
),
se tiene entonces que andn → 1 y bncn → 0, en particular, si n es su-ficientemente grande andn > 0. Usaremos las trazas de ciertos conmuta-dores para encontrar condiciones de las entradas de las matrices Tn. SiCn = T Tn T
−1 T −1n , entonces
Cn =
(λ 00 λ−1
) (an bncn dn
) (λ−1 00 λ
) (dn −bn−cn an
)
=
(λan λbnλ−1cn λ−1dn
) (λ−1dn −λ−1bn−λcn λan
)
=
(andn − λ2bncn −anbn + λ2anbnλ−2dncn − dncn −λ−2bncn + andn
),
por lo cual la traza de Cn esta dada por
2 + 2bncn − bncn(λ2 + λ−2)
= 2− bncn(λ− λ−1)2. (3.2)
Ahora, calculamos las trazas de las matrices Dn = T Cn T−1C −1
n , setiene que
TCn =
(λ 00 λ−1
) (1− bncn(λ
2 − 1) anbn(λ2 − 1)
cndn(λ−2 − 1) 1− bncn(λ
−2 − 1)
)
=
(λ[1− bncn(λ
2 − 1)]
λanbn(λ2 − 1)
λ−1cndn(λ−2 − 1) λ−1
[1− bncn(λ
−2 − 1)])
y
T−1C−1n =
(λ−1 00 λ
) (1− bncn(λ
−2 − 1) −anbn(λ2 − 1)−cndn(λ−2 − 1) 1− bncn(λ
2 − 1)
)=
(λ−1
[1− bncn(λ
−2 − 1)]
−λ−1anbn(λ2 − 1)
−λcndn(λ−2 − 1) λ[1− bncn(λ
2 − 1)]) .

116 CAPITULO 3. GRUPOS FUCHSIANOS
Por lo cual la entrada superior izquierda de Dn esta dada por[1− bncn(λ
2 − 1)][
1− bncn(λ−2 − 1)
]− λ2anbncndn(λ
2 − 1)(λ−2 − 1)
y la inferior derecha por
−λ−2anbncndn(λ2 − 1)(λ−2 − 1) +
[1− bncn(λ
−2 − 1)][
1− bncn(λ2 − 1)
].
En consecuencia, la traza de Dn es
−anbncndn(λ2−1)(λ−2−1)(λ2 +λ−2)+2[1−bncn(λ2−1)
][1−bncn(λ−2−1)
]= anbncndn(λ
2 − 2 + λ−2)(λ2 + λ−2) + 2 + 2b2nc2n(λ
2 − 1)(λ−2 − 1)
−2bncn(λ2 − 1 + λ−2 − 1)
= anbncndn(λ−λ−1)2(λ2+λ−2)+2anbncndn(2−λ2−λ−2)−2bncn(2−λ2−λ−2)
+2− 2bncn(λ2 + λ−2 − 2)
= 2 + anbncndn(λ− λ−1)2[λ2 + λ−2 − 2
]= 2 + anbncndn(λ− λ−1)4. (3.3)
Ahora, ya que |χ(Cn)| ≥ 2 y bncn → 0, se sigue de (3.2) que χ(Cn) ≥ 2,si n es suficientemente grande. En particular, existe un natural N1, tal quesi n > N1, se tiene bncn ≤ 0.
Tambien, como |χ(Dn)| ≥ 2 y anbncndn → 0, se sigue de (3.3) queχ(Dn) ≥ 2, si n es suficientemente grande, digamos n > N2. En consecuen-cia, anbncndn ≥ 0, si n > N2. Mas aun, ya que andn → 1, cuando n→∞,existe un natural N3, tal que si n > N3, andn > 0.
Por consiguiente, tomando N = max{N1, N2, N3} y n > N, se tienebncn ≤ 0 y tambien bncn ≥ 0, por lo cual bncn = 0. Se sigue entoncesde (3.2) que χ(Cn) = 2 y que Cn = Id, ya que el grupo es puramentehiperbolico. Finalmente, como T y Tn conmutan, si n > N, necesariamenteTn fija 0 e ∞. �
El sorprendente resultado que se muestra a continuacion fue encontradopor Lauritzen, la demostracion que se exhibe se debe a Siegel.
Teorema 3.2.19 Sea Γ < PSL(2,R) no abeliano y puramente hiperbolico,entonces Γ es discreto.

3.2. GRUPOS DISCRETOS. 117
Demostracion. Sin perdida de generalidad
T =
(λ 00 λ−1
)∈ Γ < SL(2,R), λ > 0, λ 6= 1.
Si Γ no es discreto, existe una sucesion de matrices distintas Sn ∈ Γ, talesque Sn → Id. Se sigue entonces del Lema 3.2.18 que si n > N, entonces
Sn =
(ρn 00 ρ−1
n
), ρ2
n > 1.
Ahora, como Γ no es abeliano, existe S en Γ, tal que no fija 0 e ∞, porlo que esta transformacion esta dada por una matriz de la forma(
a bc d
)∈ Γ, b, c 6= 0.
Aunque a priori el grupo podrıa no ser discreto, se tiene que cualquierpar de hiperbolicas en Γ fijan los mismos puntos o puntos ajenos. Esto sesigue, ya que si tuvieran un solo punto fijo en comun, el conmutador serıaparabolico (vease el Ejercicio 3.1.2).
Calculamos ahora
Tn = SnSS−1n S =
(ρn 00 ρ−1
n
) (a bc d
) (ρ−1n 00 ρn
) (d −b−c a
)
=
(ρna ρnbρ−1n c ρ−1
n d
) (ρ−1n d −ρ−1
n b−ρnc ρna
)=
(∗ (ρ2
n − 1)ab(ρ−2n − 1)cd ∗
). (3.4)
Finalmente, se sigue del Lema 3.1.8 que Tn → Id, por lo que aplicandode nuevo el Lema 3.2.18 se tiene
Tn =
(∗ 00 ∗
),
si n > N ′ (N ′ > N). Por consiguiente, (3.4) implica que ab = 0 y cd = 0,sin embargo, como b, c 6= 0, se tiene a, d = 0, lo que contradice | a+ d |> 2.
�
118 CAPITULO 3. GRUPOS FUCHSIANOS
Una interpretacion geometrica de la prueba del Teorema 3.2.19 se puedeconsultar en [2] capıtulo 8. Observese que este teorema no es cierto si Γ esabeliano, considerese por ejemplo, el grupo de todas las homotecias.
EJERCICIOS 3.2.
1. Demuestre que si dos grupos de matrices en SL(2,C) determinan el mismogrupo de transformaciones, entonces ambos simultaneamente son (o no son)discretos.
2. Sea ψ un homeomorfismo entre dos espacios metricos X y Y, demuestreque un grupo G actua discontinuamente en X si y solo si el grupo ψGψ−1
actua discontinuamente en Y.
3. Sea Γ un subgrupo de PSL(2,C) que actua en un subdominio M de laesfera de Riemann, supongase tambien que M intersecta al conjunto lımitede Γ, demuestre que Γ no actua discontinuamente en M.
4. Demuestre que si T ∈ PSL(2,R), entonces 2 cos h ρ(i, T (i)
)= ||T ||2,
donde T es una matriz en SL(2,R) que representa a T .
5. Demuestre que si Γ es un grupo discreto de PSL(2,R), entonces Γ actuadiscontinuamente en H2.
6. Exhiba un subgrupo discreto abeliano de PSL(2,C) con transformacionesparabolicas y que no sea cıclico.
7. Exhiba un subgrupo discreto abeliano de PSL(2,C) que no contengatransformaciones parabolicas y que no sea cıclico.
3.3. Conjunto lımite de un grupo discreto
Probaremos que un punto lımite de un grupo fuchsiano es punto de acu-mulacion de todas las orbitas, excepto, quiza, de una o dos de ellas. Comoconsecuencia de este resultado se prueba que los subgrupos normales de losgrupos horocıclicos son tambien horocıclicos, en este proceso se exhiben tam-bien varias propiedades fundamentales del conjunto lımite.
Proposicion 3.3.1 Sea Γ fuchsiano y λ ∈ L(Γ) punto fijo de alguna trans-
formacion de Γ, entonces existe λ′ ∈ L(Γ), tal que ∀z ∈ C− {λ, λ′}, λ esun punto de acumulacion de Γ(z).
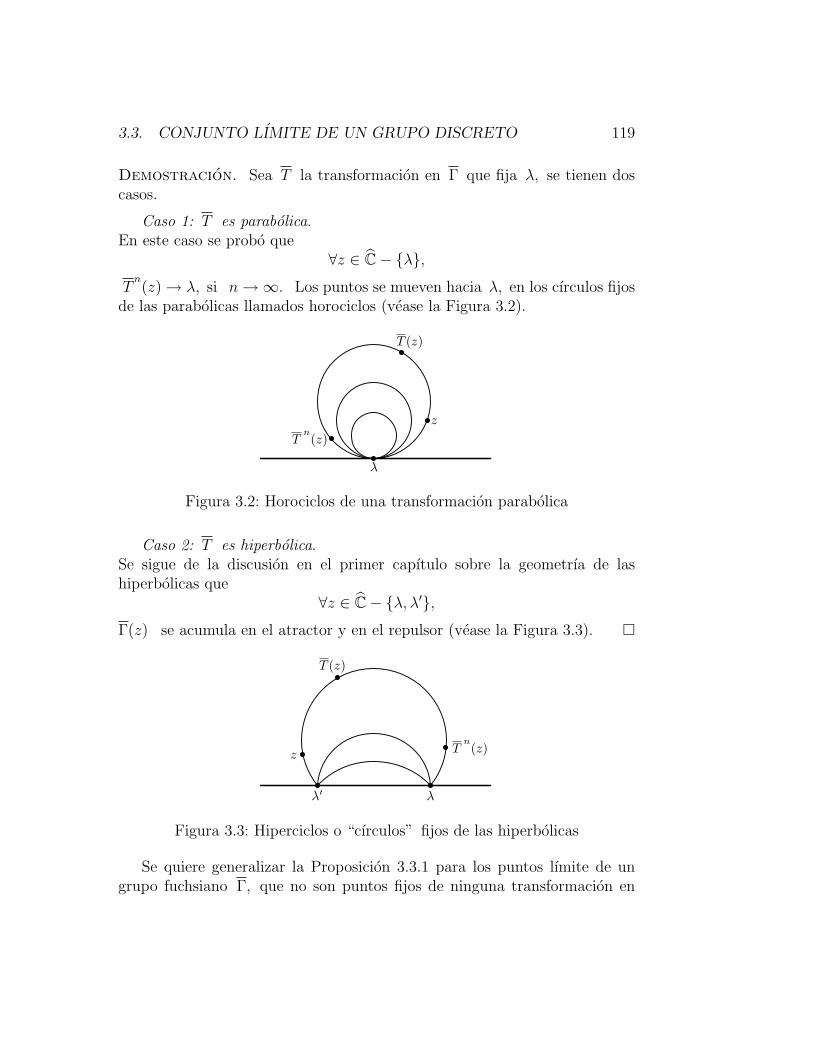
3.3. CONJUNTO LIMITE DE UN GRUPO DISCRETO 119
Demostracion. Sea T la transformacion en Γ que fija λ, se tienen doscasos.
Caso 1: T es parabolica.En este caso se probo que
∀z ∈ C− {λ},
Tn(z) → λ, si n→∞. Los puntos se mueven hacia λ, en los cırculos fijos
de las parabolicas llamados horociclos (vease la Figura 3.2).
z
T (z)
Tn
(z)
λ
Figura 3.2: Horociclos de una transformacion parabolica
Caso 2: T es hiperbolica.Se sigue de la discusion en el primer capıtulo sobre la geometrıa de lashiperbolicas que
∀z ∈ C− {λ, λ′},
Γ(z) se acumula en el atractor y en el repulsor (vease la Figura 3.3). �
λλ′
z
T (z)
Tn
(z)
Figura 3.3: Hiperciclos o “cırculos” fijos de las hiperbolicas
Se quiere generalizar la Proposicion 3.3.1 para los puntos lımite de ungrupo fuchsiano Γ, que no son puntos fijos de ninguna transformacion en

120 CAPITULO 3. GRUPOS FUCHSIANOS
el grupo distinta de la identidad. Como las hipotesis y las conclusiones soninvariantes bajo conjugacion, basta probar el resultado para subgrupos dis-cretos de M(∆). Observese que en este caso L(Γ) ⊂ ∂∆, y solo existe unnumero finito de transformaciones en Γ determinadas por matrices de laforma (
∗ 00 ∗
),
ya que las correspondientes transformaciones fijan 0 e ∞ y estos son puntosordinarios. Recordamos que
M(∆) =
{(a cc a
)∈ SL(2,C)
}.
En general, el conjunto de numeros complejos que aparecen en algunade las cuatro entradas de un subgrupo discreto de matrices de SL(2,Z), nodebe ser acotado (ejercicio). El siguiente resultado refina este hecho para elcaso particular de las matrices definidas por un subgrupo discreto de M(∆).
Lema 3.3.2 Dado Γ ∈ M(∆) discreto, no existe una sucesion de matricesdistintas de Γ (
an cncn an
), n ∈ N,
tales que an → a ∈ C, o tales que cn → c ∈ C.
Demostracion. Si an → a, |an|2 → |a| 2 y |cn| 2 → |a| 2−1. Pero entonceslas sucesiones an y cn estan acotadas y se puede extraer una subsucesionconvergente de (
an cncn an
), n ∈ N. (3.5)
Lo cual contradice que Γ es un grupo discreto. El caso cn → c es analogo.
�
Observese que en el contexto del lema anterior, dada cualquier sucesionde matrices distintas de la forma (3.5), necesariamente cn → ∞, cuandon→∞. Como caso particular de este lema, se sigue tambien que las entradassuperiores derechas cn de estas matrices no convergen a 0. Estos hechos losaplicaremos posteriormente.

3.3. CONJUNTO LIMITE DE UN GRUPO DISCRETO 121
Corolario 3.3.3 Para todo subgrupo fuchsiano Γ de M(∆) existe un numeropositivo m con la siguiente propiedad:
si
(an cncn an
)∈ Γ, entonces cn = 0 o |cn| > m.
Definicion 32 Sean Γ < PSL(2,C) y z ∈ C, se define ΛΓ (z) como el
conjunto de los puntos w ∈ C, tales que existen transformaciones distintasT n ∈ Γ, para las cuales T n(z) → w.
En general, los puntos de ΛΓ(z) son los puntos de acumulacion de laorbita de z y el mismo punto z, cuando este es un punto fijo de una trans-formacion de orden infinito; sin embargo, existen subgrupos en PSL(2,C)cuyos puntos en ΛΓ(z), no tienen estas caracterısticas (ejercicio). Evidente-mente se tiene tambien que ∀z, ΛΓ(z) ⊂ L(Γ), algunas veces denotaremos
a ΛΓ(z) simplemente por Λ(z). El siguiente resultado muestra que ∀z ∈ Cel conjunto Λ(z) es invariante y cerrado.
Lema 3.3.4 Sea Γ < PSL(2,C) y z ∈ C. Entonces:
(i) T (Λ(z)) = Λ(z), ∀T ∈ Γ;
(ii) Λ(z) es cerrado.
Demostracion. La prueba de (i) es identica a la del Teorema 3.1.3 (ejer-cicio).
Para probar (ii) sea λk, k ∈ N, una sucesion en Λ(z), tal que λk → λ,tomando subsucesiones se puede suponer que |λk − λ| < 1/k. Se puedetambien tomar transformaciones distintas T nk
en Γ, tales que
|T nk(z)− λk| < 1/k.
Como las λk son puntos distintos, las T nkse pueden tomar, en efecto, dis-
tintas (si λ = ∞, se debe usar la metrica cordal). Por consiguiente
|T nk(z)− λ| ≤ |T nk
(z)− λk|+ |λk − λ| ≤ 2
k
y λ ∈ Λ(z). �
Se puede probar que si Γ < PSL(2,C) es no elemental y discreto, en-
tonces ∀z ∈ C, se tiene que L(Γ) = Λ(z). Vease [2] p. 98. En este textoprobamos un caso particular de este hecho.

122 CAPITULO 3. GRUPOS FUCHSIANOS
Teorema 3.3.5 Sea Γ < M(∆) discreto, entonces L(Γ) = Λ(∞).
Demostracion. Hay que probar que L(Γ) ⊂ Λ(∞). Sea λ ∈ L(Γ),entonces
λ = lımn→∞
T n(z), donde Tn =
(an cncn an
)son matrices distintas en Γ y z ∈ C (si z = ∞, no hay nada que probar).Como ya se menciono, se tiene que cn = 0, solamente para un numero finitode transformaciones, por lo que podemos suponer que cn 6= 0, ∀n. Se tieneentonces dos posibilidades:
(i) |cnz + an| ≥ 1, si n > N .
(ii) |cnkz + ank
| < 1, en una subsucesion nk , k ∈ N.
En el segundo caso, se sigue del Lema 3.3.2 que
|z − T−1
nk(∞)| =
∣∣∣∣z − (− ank
cnk
)∣∣∣∣ <1
|cnk|7−→ 0
y z ∈ Λ(∞); tambien por la invariabilidad (Lema 3.3.4), T nk(z) ∈ Λ(∞).
Mas aun, como Λ(∞) es cerrado (Lema 3.3.4), se sigue que λ ∈ Λ(∞).
En el primer caso
|T n(z)− T n(∞)| =∣∣∣∣anz + cncnz + an
− ancn
∣∣∣∣=
∣∣∣∣ −1
cn(cnz + an)
∣∣∣∣ ≤ 1
| cn|, si n > N,
puesto que anan − cncn = 1. Por lo tanto
|T n(z)− T n(∞)| 7−→ 0,
cuando n→∞, y
|λ− T n(∞)| ≤ |λ− T n(z)|+ |T n(z)− T n(∞)| 7−→ 0,
cuando n→∞. En consecuencia, λ ∈ Λ(∞). �
Corolario 3.3.6 Sea Γ fuchsiano, entonces L(Γ) es cerrado y por lo tantoO(Γ) es abierto.

3.3. CONJUNTO LIMITE DE UN GRUPO DISCRETO 123
Demostracion. Si Γ < M(∆), el resultado se sigue directamente delTeorema 3.3.5; el caso general es consecuencia de la Proposicion 3.1.5 �
El Corolario 3.3.6 se generaliza a cualquier subgrupo de PSL(2,C) (cf.[2] pp. 96-99). Por otra parte, es didactico aplicar este resultado para probar,de otra manera, que un grupo discreto es a lo sumo numerable. Necesitamosprimero un resultado basico del analisis.
Lema 3.3.7 Sea A ⊂ Rn abierto, entonces
A =∞⋃i=1
Ki, (3.6)
donde Ki, i ∈ N, son conjuntos compactos.
Demostracion. Si A = Rn, definiendo Kn = B(0, n), se sigue el resulta-do. De otra manera, ∂A no es vacıa y se define
Kn = B(0, n) ∩ An,
donde An = {z ∈ A | d(z, ∂A) ≥ 1/n}. Como A es abierto, se sigue quesi z ∈ A, entonces d(z, ∂A) > 0 y por lo tanto z ∈ B(0, n) ∩ An, si n essuficientemente grande. En consecuencia, se sigue (3.6) y basta probar quelos conjuntos An son cerrados.
Para probar que An es cerrado, sea zm ∈ An, m ∈ N, tal que zm → z. Siz /∈ An, entonces d(z, ∂A) < 1/n. Sin embargo, tomando w ∈ ∂A, tal qued(z, w) = d(z, ∂A), se obtiene una contradiccion al tomar zm suficientementecercana a z, de tal manera que d(zm, z) + d(z, w) < 1/n.
�
Usamos este hecho para probar, de una nueva manera, que si Γ es fuch-siano, entonces Γ es a lo sumo numerable. Sea
O(Γ) =∞⋃n=1
Kn,
donde Kn, n ∈ N, son conjuntos compactos. Ahora, tomando α ∈ O fijo, setiene que para cualquier natural m fijo, existe un numero finito de transfor-maciones T j ∈ Γ, tal que T j(α) ∈ Km; puesto que Km consiste en puntosordinarios. Esto se sigue ya que de otra manera, la orbita de α se acumula

124 CAPITULO 3. GRUPOS FUCHSIANOS
en algun punto de Km, o α toma un valor en Km un numero infinito deveces. Haciendo variar m se sigue el resultado.
Como se mostro anteriormente, puede tambien probarse, sin usar la dis-continuidad, que si Γ < PSL(2,C) es discreto, entonces Γ es a lo sumonumerable. Esto se seguıa, puesto que dada k ∈ N, solo puede haber unnumero finito de matrices en el grupo con normas menores a k. Probamosahora un resultado complementario a la Proposicion 3.3.1.
Lema 3.3.8 Sea Γ fuchsiano y λ un punto lımite de Γ, que no es un puntofijo, entonces ∀z ∈ C, z 6= λ′, se tiene que la orbita de z se acumula en λ,donde λ′ es un punto en C que solo depende de λ y Γ.
Demostracion. Sin perder generalidad podemos suponer Γ < M(∆). Sesigue del Teorema 3.3.5 que λ ∈ Λ(∞), por lo que existen T n ∈ Γ distintos,tales que T n(∞) → λ,
Tn =
(an cncn an
)∈ Γ.
El mismo calculo de la prueba del Teorema 3.3.5 muestra que
|T (z)− T n(∞)| = 1
|cn(cnz + an)|=
1
|cn|21
|z − (−an/ cn)|. (3.7)
Ademas, el conjunto−ancn
= T−1
n (∞), n ∈ N,
esta acotado, ya que no puede acumularse en el punto ordinario ∞; por loque existe un punto de acumulacion λ′ y una subsucesion T nk
, para la cual
T−1
nk(∞) → λ′ (notese que λ′ ∈ L(Γ)).
Ahora, si z ∈ C, z 6= λ′, entonces el conjunto T−1
nk(∞), k ∈ N, no se
acumula en z, por lo que∣∣∣∣z − (−ank
cnk
)∣∣∣∣ ≥ ε > 0, si k > N. (3.8)
Mas aun, se sigue de la observacion despues del Lema 3.3.2 que cn → ∞,cuando n→∞. En consecuencia, usando (3.7) y (3.8) se tiene que
|T nk(z)− T nk
(∞)| ≤ 1
ε|cnk|27−→ 0,

3.3. CONJUNTO LIMITE DE UN GRUPO DISCRETO 125
por lo que T nk(z) → λ, ∀z ∈ C− {λ′} (puesto que T nk
(∞) → λ).
Finalmente, T nk(z), k ∈ N, es un conjunto infinito, de otra manera
T nk(z) = λ, si k > N , pero entonces T nk+1
T−1
nk(λ) = λ, contradiciendo que
λ no es un punto fijo. Por lo tanto, ∀z ∈ C− {λ′}, Γ(z) se acumula en λ.
�
Mostraremos que el lema anterior se puede afinar aun mas, esto es, bajolas hipotesis de este lema, todas las orbitas se acumulan en λ. El argumentode este lema muestra tambien que si K es un compacto en C, tal queλ′ /∈ K, entonces existen transformaciones distintas T n ∈ Γ, n ∈ N, talesque T n(z) → λ uniformemente en K (ejercicio).
Definicion 33 Dado Γ < PSL(2,C) y z ∈ C, se define el conjunto deriva-do de z, denotado por d(Γ(z)), como el conjunto de puntos de acumulacionde la orbita de z.
Observese que d(Γ(z)) ⊂ Λ(z). La contencion es propia, por ejemplo, siΓ =< z → 2z >, entonces d(Γ(0)) = ∅, sin embargo 0 ∈ Λ(z).
Teorema 3.3.9 Sea Γ fuchsiano. Entonces:
(i) L = d(Γ(z)) ∀z ∈ O;
(ii) si Γ es no elemental, entonces L = d(Γ(z)) ∀z ∈ C.
Demostracion. El primer resultado es inmediato de la Proposicion 3.3.1y de la prueba del Lema 3.3.8, ya que λ′ ∈ L.
Para probar (ii), notese que bajo estas hipotesis toda orbita contieneal menos tres puntos. Para probar esta afirmacion, observese primero quesi hubiera una orbita de un solo punto, se tendrıa que Γ serıa un grupoestabilizador y L(Γ) tendrıa a lo mas dos puntos, en virtud de la Proposicion3.2.10. Por otra parte, si el conjunto {z1, z2} es una orbita, entonces todoelemento de Γ preserva {z1, z2} y se tienen dos posibilidades:
(a) Γ es de orden 2, lo cual no es posible, ya que este grupo es no elemental.
(b) Γ contiene como subgrupo de ındice 2 a un grupo estabilizador y denuevo L(Γ) tendrıa a lo mas dos puntos (vease el Teorema 3.1.4).
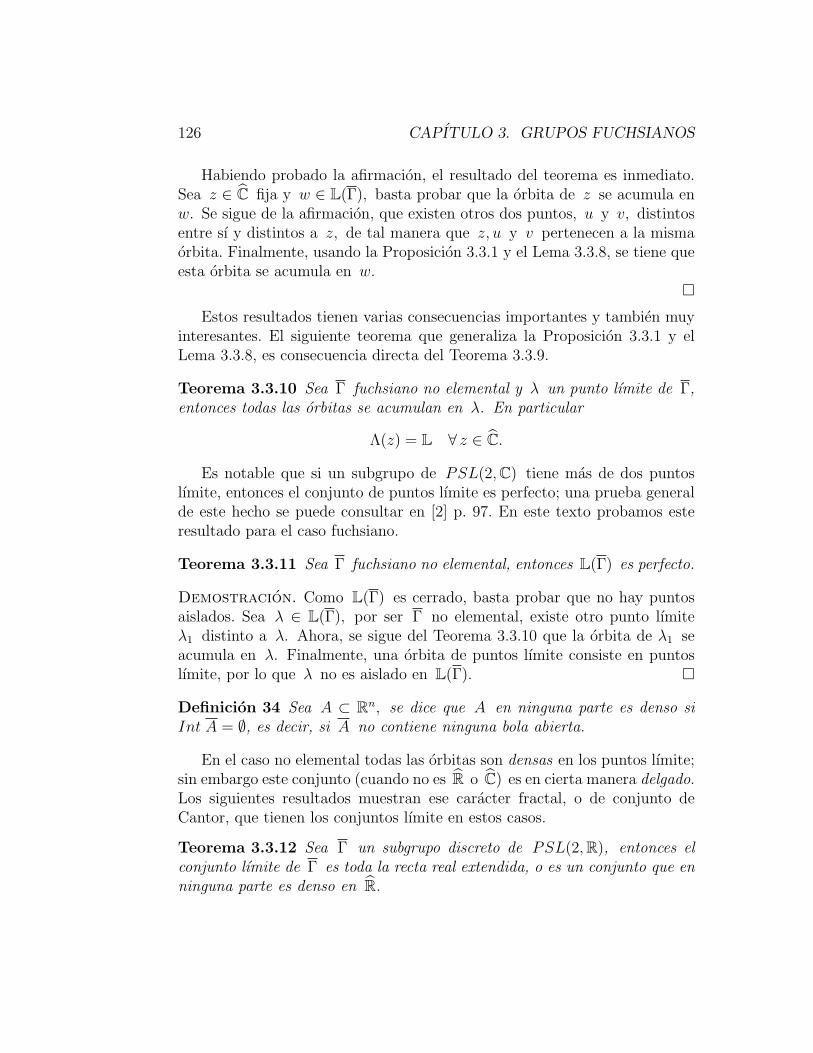
126 CAPITULO 3. GRUPOS FUCHSIANOS
Habiendo probado la afirmacion, el resultado del teorema es inmediato.Sea z ∈ C fija y w ∈ L(Γ), basta probar que la orbita de z se acumula enw. Se sigue de la afirmacion, que existen otros dos puntos, u y v, distintosentre sı y distintos a z, de tal manera que z, u y v pertenecen a la mismaorbita. Finalmente, usando la Proposicion 3.3.1 y el Lema 3.3.8, se tiene queesta orbita se acumula en w.
�
Estos resultados tienen varias consecuencias importantes y tambien muyinteresantes. El siguiente teorema que generaliza la Proposicion 3.3.1 y elLema 3.3.8, es consecuencia directa del Teorema 3.3.9.
Teorema 3.3.10 Sea Γ fuchsiano no elemental y λ un punto lımite de Γ,entonces todas las orbitas se acumulan en λ. En particular
Λ(z) = L ∀ z ∈ C.
Es notable que si un subgrupo de PSL(2,C) tiene mas de dos puntoslımite, entonces el conjunto de puntos lımite es perfecto; una prueba generalde este hecho se puede consultar en [2] p. 97. En este texto probamos esteresultado para el caso fuchsiano.
Teorema 3.3.11 Sea Γ fuchsiano no elemental, entonces L(Γ) es perfecto.
Demostracion. Como L(Γ) es cerrado, basta probar que no hay puntosaislados. Sea λ ∈ L(Γ), por ser Γ no elemental, existe otro punto lımiteλ1 distinto a λ. Ahora, se sigue del Teorema 3.3.10 que la orbita de λ1 seacumula en λ. Finalmente, una orbita de puntos lımite consiste en puntoslımite, por lo que λ no es aislado en L(Γ). �
Definicion 34 Sea A ⊂ Rn, se dice que A en ninguna parte es denso siInt A = ∅, es decir, si A no contiene ninguna bola abierta.
En el caso no elemental todas las orbitas son densas en los puntos lımite;sin embargo este conjunto (cuando no es R o C) es en cierta manera delgado.Los siguientes resultados muestran ese caracter fractal, o de conjunto deCantor, que tienen los conjuntos lımite en estos casos.
Teorema 3.3.12 Sea Γ un subgrupo discreto de PSL(2,R), entonces elconjunto lımite de Γ es toda la recta real extendida, o es un conjunto que enninguna parte es denso en R.

3.3. CONJUNTO LIMITE DE UN GRUPO DISCRETO 127
Demostracion. Si Γ no es horocıclico, sea λ ∈ L(Γ) y
α ∈ O(Γ) ∩ R.
Se sigue entonces del Teorema 3.3.9 que la orbita de α se acumula en λ. Enconsecuencia, cualquier intervalo alrededor de λ contiene puntos ordinarios,es decir, L(Γ) en ninguna parte es denso (ya que no contiene ningun intervaloabierto). �
Este resultado se generaliza a otros grupos fuchsianos, interpretando in-tervalos como segmentos de “cırculos”. Mas aun, el Teorema 3.3.9 tambienes cierto para subgrupos discretos de PSL(2,C) (cf. [2] p. 98); por lo que sepuede aplicar un argumento similar a la prueba del Teorema 3.3.12 y probarque si un subgrupo de PSL(2,C) es no elemental y discontinuo, entonces su
conjunto lımite en ninguna parte es denso en C. El siguiente resultado mues-tra que, en general, los conjuntos lımite son los menores conjuntos invariantesy cerrados. Una generalizacion a subgrupos no elementales de PSL(2,C) sepuede consultar en [2] p. 97.
Teorema 3.3.13 Sea Γ fuchsiano y W ⊂ C cerrado y Γ− invariante concardinalidad mayor a 1, entonces
L(Γ) ⊂ W.
Demostracion. Si L(Γ) es vacıo no hay nada que probar. Supongamosque existe un punto λ ∈ L(Γ), tal que λ /∈ W. Como W es cerrado, existeuna vecindad N de λ, tal que N ∩W = ∅. Ahora, si λ1, λ2 son dos puntosdistintos en W, se sigue de la Proposicion 3.3.1 y del Lema 3.3.8 que la orbitade alguno de ellos se acumula en λ, es decir, intersecta N, lo que contradiceN ∩W = ∅ (ya que W es Γ− invariante). Por lo cual L(Γ) ⊂ W. �
El teorema anterior no es valido para conjuntos invariantes que constande un solo elemento. Por ejemplo, si Γ =< z → 2z >, entonces su con-junto lımite es {0,∞}; sin embargo {0} es Γ− invariante. Podemos ahorageneralizar las Proposiciones 3.2.13 y 3.2.14.
Teorema 3.3.14 Sea G un subgrupo normal de un grupo horocıclico Γ enPSL(2,R), entonces G es horocıclico.
Demostracion. Usando las Proposiciones 3.2.13 y 3.2.14, se puede suponerque L(G) consiste en al menos dos puntos. Basta probar que el conjunto

128 CAPITULO 3. GRUPOS FUCHSIANOS
L(G) es Γ − invariante, ya que en este caso –como es cerrado– se seguirıadel Teorema 3.3.13 que
L(G) = L(Γ) = R.Para probar que L(G) es Γ − invariante, sean T ∈ Γ y λ ∈ L(G),
entonces existen transformaciones distintas T n ∈ G y z ∈ C, tales queT n(z) → λ, cuando n→∞. Ahora, como T es continua, se sigue que
T T n T−1
(w) 7−→ T (λ),
donde w = T (z). Finalmente, como T T n T−1
son transformaciones distin-tas en G, se sigue que T (λ) ∈ L(G), y por ende la afirmacion. �
Usando la Proposicion 3.1.5, se puede generalizar el resultado anteriorpara cualquier grupo fuchsiano. Para terminar este capıtulo mostramos otrascaracterizaciones del conjunto lımite en terminos de los puntos fijos.
Proposicion 3.3.15 Sea Γ un grupo fuchsiano y FΓ el conjunto de lospuntos fijos de las transformaciones distintas de la identidad en Γ, entonces
L(Γ) ⊂ F Γ,
donde F Γ denota la cerradura de FΓ en C.
Demostracion. Observese primero que si Γ 6= Id, entonces FΓ tienecardinalidad mayor o igual a uno. Para el caso en que FΓ consta de un solopunto, es claro que Γ es un grupo cıclico parabolico y la proposicion se siguede manera inmediata.
Ahora, FΓ es Γ− invariante. Esto se cumple, dado que para toda trans-
formacion S en Γ, se tiene que T fija z0 si y solo si S T S−1
fija S(z0).Tambien F Γ es Γ−invariante, ya que dada zn, n ∈ N, una sucesion de pun-tos fijos tales que zn → z0, y una funcion S ∈ Γ; entonces S(zn) → S(z0) yS(z0) ∈ F Γ. Por consiguiente, si F Γ consta de mas de un punto, el resultadose sigue del Teorema 3.3.13 �
Teorema 3.3.16 Sea Γ fuchsiano con transformaciones hiperbolicas y Λ lacerradura del conjunto de puntos fijos de los elementos hiperbolicos, entoncesL(Γ) = Λ.
Demostracion. Se pueden aplicar los mismos argumentos de la prueba dela proposicion anterior, por ejemplo, si T es hiperbolica y fija z0, entonces
S T S−1
es hiperbolica y fija S(z0), etcetera. Por consiguiente, L(Γ) ⊂ Λ;la otra contencion es inmediata, ya que el conjunto lımite es cerrado. �

3.3. CONJUNTO LIMITE DE UN GRUPO DISCRETO 129
Teorema 3.3.17 Sea Γ fuchsiano con elementos parabolicos y P la cerra-dura del conjunto de puntos fijos parabolicos, entonces L(Γ) = P.
Demostracion. Si P consta de un solo punto z0, donde S(z0) = z0,entonces Γ es el grupo estabilizador Γz0 . Esto se tiene, ya que si para alguna
transformacion T en Γ, T (zo) 6= z0, se seguirıa que T S T−1
es parabolicay fija T (z0). Por consiguiente, Γ es un grupo cıclico parabolico (Teorema3.2.9), lo cual prueba el teorema en este caso, ya que L(Γ) = {z0}.
Si P consta de mas de un punto, el resultado se sigue de manera analogaa la prueba del Teorema 3.3.16. �
Algunos autores definen al conjunto lımite de un subgrupo discreto noelemental de PSL(2,C) como la cerradura de los puntos fijos hiperbolicos yloxodromicos. Esta definicion, junto con un analisis detallado de los gruposelementales discretos (entre ellos los grupos platonicos), permite generalizarnuestros resultados a los subgrupos discretos de PSL(2,C), vease [2] cap. 5.
EJERCICIOS 3.3
1. Demuestre la existencia de subgrupos de PSL(2,C) con puntos lımite que
no son puntos de acumulacion de las orbitas en C, ni tampoco son puntosfijos de transformaciones de orden infinito.
2. Pruebe que si un grupo de matrices representa a un subgrupo discretoPSL(2,C), entonces alguno de los cuatro conjuntos de numeros complejosdefinidos por las entradas de estas matrices no es acotado.
3. Demuestre la primera parte del Lema 3.3.4.
4. Sea λ un punto lımite de un grupo fuchsiano Γ, demuestre la existenciade un punto λ′ ∈ C, con la siguiente propiedad: si K es un conjunto com-pacto en C, tal que λ′ /∈ K, se tiene entonces que existen transformacionesdistintas T n ∈ Γ, n ∈ N, tales que T n(z) → λ uniformemente en K.
5. Demuestre que si el conjunto de puntos fijos de un grupo fuchsiano Γ con-siste en dos puntos, entonces el grupo es cıclico hiperbolico o cıclico elıptico.
130 CAPITULO 3. GRUPOS FUCHSIANOS

Capıtulo 4
Regiones fundamentales
En este ultimo capıtulo se definen los conjuntos y las regiones fundamentales,lo cual conlleva el estudio de las teselaciones del plano hiperbolico y tambiendel espacio hiperbolico tridimensional. El caso bidimensional es de gran uti-lidad en la teorıa de los numeros; el tridimensional lo es para la topologıade las variedades de dimension 3. En este texto se construyen los polıgonosde Dirichlet y de Ford para grupos con traslaciones, y se prueban algunas desus propiedades fundamentales. Como ejemplo principal, se muestra que elpolıgono descrito en la Figura 4.26 es una region fundamental de Ford y deDirichlet para el grupo clasico modular.
4.1. Regiones fundamentales
Como se mostro en el capıtulo anterior, dado Γ un subgrupo de PSL(2,R),
la accion de Γ en C define una particion que consiste en las orbitas.
Definicion 35 Sea Γ un subgrupo de PSL(2,R), un conjunto fundamental
F para la accion de Γ en H2 (o en C) es cualquier conjunto que contiene
uno y solo un elemento en H2 (o en C) por cada orbita, es decir,
(i) si z1, z2 ∈ F, no existe T ∈ Γ, tal que T (z1) = z2;
(ii) ∀z ∈ H2 (o en C) existe T ∈ Γ, tal que T (z) ∈ F.
El axioma de eleccion establece que si Xi, i ∈ I, es una familia deconjuntos, entonces existe una coleccion de elementos xi, i ∈ I, de talmanera que xi ∈ Xi ∀i. Este principio nos permite asegurar la existencia
131

132 CAPITULO 4. REGIONES FUNDAMENTALES
de conjuntos fundamentales. La definicion se aplica tambien a otros gruposfuchsianos o a las extensiones de Poincare de un subgrupo de PSL(2,C) enH3.
Estos conjuntos no son de ninguna manera unicos. Por ejemplo, si F esuno de ellos, A es un subconjunto de H2 y T es una transformacion en Γ,entonces
(F − A)⋃
T (F ∩ A)
tambien lo es.Es claro asimismo que estos conjuntos pueden ser topologicamente muy
exoticos. Sin embargo, la intencion es construirlos de manera simple, porejemplo, el grupo Γ =< z → z + λ >, λ ∈ R+, λ 6= 0, 1, tiene comoconjunto fundamental el descrito en la Figura 4.1.
0 λ
F
Figura 4.1: Conjunto fundamental para un grupo de traslaciones por reales
λ
µ
Figura 4.2: Conjunto fundamental para un grupo doblemente periodico
Ahora, si Γ es el grupo generado por las traslaciones T (z) = z + α,y S(z) = z + µ, donde λ, µ son linealmente independientes como vectores

4.1. REGIONES FUNDAMENTALES 133
en R2, un conjunto fundamental para Γ, respecto a su accion en C, es elparalelogramo semiabierto descrito en la Figura 4.2.
Otro ejemplo sencillo es el grupo cıclico elıptico Γ en M(∆) generadopor T , donde T (z) = z e2π i/q, q ∈ N, q > 1. En este caso, un conjuntofundamental para Γ, respecto a su accion en M(∆), es el descrito en laFigura 4.3.
e2πi/q
Figura 4.3: Conjunto fundamental para un grupo cıclico de rotaciones
Un conjunto fundamental F no puede ser abierto (ejercicio). Ahora, comoevidentemente es mas sencillo trabajar con conjuntos abiertos (o cerrados),se establece una definicion mas adecuada para estudiar estos conjuntos derepresentantes de orbitas, que conllevan a las teselaciones hiperbolicas.
Definicion 36 Sea Γ < PSL(2,R), se dice que una region R es un dominiofundamental en H2 para Γ, si se cumplen las siguientes condiciones:
(i) cualesquiera dos puntos z1, z2 ∈ R no son Γ− equivalentes;
(ii) dado w ∈ H2, existe z ∈ R y T ∈ Γ, tal que T (z) = w, donde Rdenota la cerradura de R en H2;
(iii) ∂R tiene medida bidimensional de Lebesgue cero.
A los dominios fundamentales se les conoce tambien como regiones funda-mentales. La condicion (iii) es esencial al tomar cocientes (estos cocientes sonsuperficies de Riemann, cf. [2] p. 118). Observese tambien que se sigue delaxioma de eleccion que si R es una region fundamental para Γ, entonces
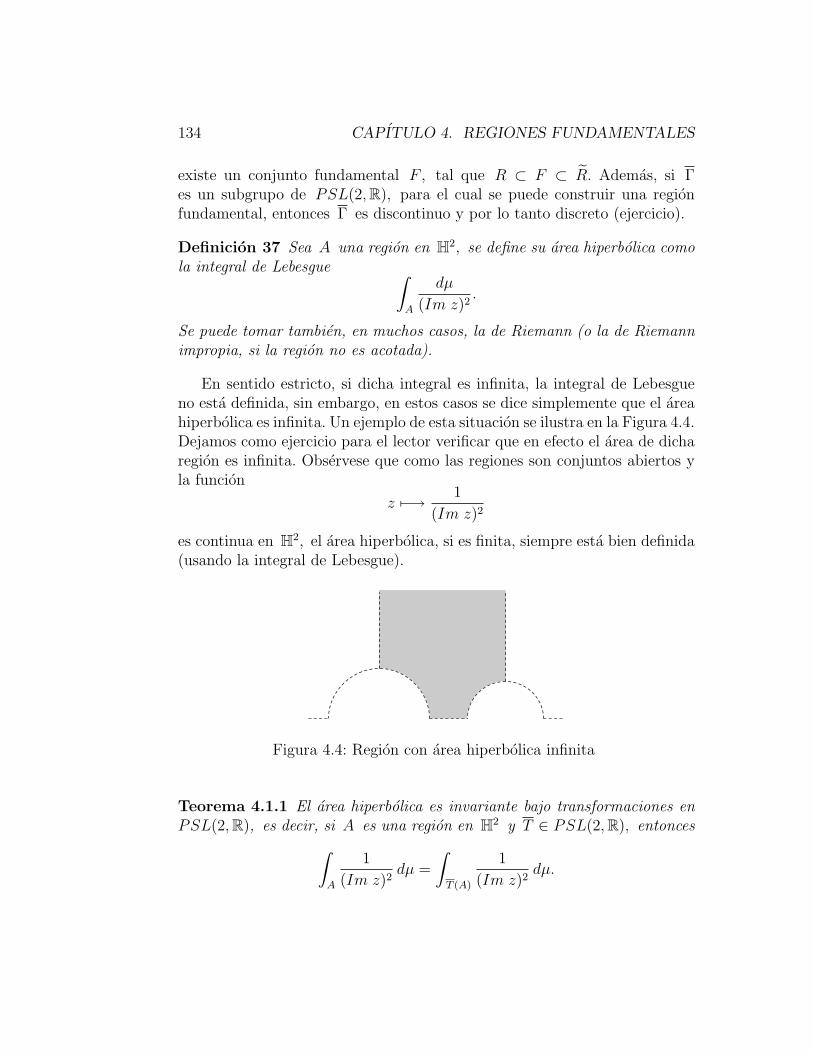
134 CAPITULO 4. REGIONES FUNDAMENTALES
existe un conjunto fundamental F , tal que R ⊂ F ⊂ R. Ademas, si Γes un subgrupo de PSL(2,R), para el cual se puede construir una regionfundamental, entonces Γ es discontinuo y por lo tanto discreto (ejercicio).
Definicion 37 Sea A una region en H2, se define su area hiperbolica comola integral de Lebesgue ∫
A
dµ
(Im z)2.
Se puede tomar tambien, en muchos casos, la de Riemann (o la de Riemannimpropia, si la region no es acotada).
En sentido estricto, si dicha integral es infinita, la integral de Lebesgueno esta definida, sin embargo, en estos casos se dice simplemente que el areahiperbolica es infinita. Un ejemplo de esta situacion se ilustra en la Figura 4.4.Dejamos como ejercicio para el lector verificar que en efecto el area de dicharegion es infinita. Observese que como las regiones son conjuntos abiertos yla funcion
z 7−→ 1
(Im z)2
es continua en H2, el area hiperbolica, si es finita, siempre esta bien definida(usando la integral de Lebesgue).
Figura 4.4: Region con area hiperbolica infinita
Teorema 4.1.1 El area hiperbolica es invariante bajo transformaciones enPSL(2,R), es decir, si A es una region en H2 y T ∈ PSL(2,R), entonces∫
A
1
(Im z)2dµ =
∫T (A)
1
(Im z)2dµ.

4.1. REGIONES FUNDAMENTALES 135
Demostracion. El teorema de cambio de variable para integrales de Rie-mann tambien es valido para las de Lebesgue (cf. [1] p. 179). Probamosprimero el caso de area finita. Sea
T (z) =az + b
cz + d,
ad− bc = 1, a, b, c, d ∈ R, entonces
Im(T (z)
)=
Im z
|cz + d|2
y
|T ′(z)|2 =1
|cz + d|4
es el determinante del Jacobiano de T . Se sigue entonces del teorema decambio de variable que
∫A
dµ
(Im z)2=
∫A
1(Im
(T (z)
) )2
1
|cz + d|4dµ =
∫T (A)
dµ
(Im z)2.
Si el area es infinita, se puede probar el teorema calculando primero el areaen A ∩Hn ∩Rn, n ∈ N, donde
Hn = {z ∈ H2 | Im z > 1/n}
yRn = {z ∈ H2 | − n < Re z < n}.
�
El Teorema 4.1.1 se puede enunciar de manera mas general: el areahiperbolica de cualquier region en H2 es invariante bajo cualquier isometrıahiperbolica (ejercicio). A continuacion describimos ciertas mediatrices que seocupan en la construccion de las regiones fundamentales de Dirichlet, queestudiaremos en la siguiente seccion.
Definicion 38 Dados z, w ∈ H2, se define el h-bisector perpendicular, o me-diatriz hiperbolica, al segmento de geodesica [z, w], como la unica geodesicaortogonal a [z, w] que pasa por el punto medio hiperbolico entre z y w.

136 CAPITULO 4. REGIONES FUNDAMENTALES
Llamaremos al h-bisector perpendicular simplemente bisector perpendicu-lar. Observese que dada una geodesica λ en H2 y z, w ∈ λ, existe una trans-formacion hiperbolica que preserva λ y manda z en w (basta conjugar,mandando λ al eje imaginario y aplicar una homotecia). El siguiente resul-tado muestra que en algunas instancias, la geometrıa hiperbolica satisface lasmismas propiedades que la geometrıa euclidiana.
Proposicion 4.1.2 Sean z, w ∈ H2, entonces el bisector perpendicular a[z, w] consiste en los puntos en H2 que equidistan hiperbolicamente de z yw, es decir, {
u ∈ H2∣∣ ρ(u, z) = ρ(u,w)
}.
Demostracion. Como las transformaciones en PSL(2,R) son isometrıasconformes, se puede suponer que z, w ∈ ∂∆. Mas aun, usando la observacionprevia a la proposicion, se puede tambien suponer que w = −z (vease laFigura 4.5). Ahora, como la reflexion en el eje imaginario z → −z es unaisometrıa de H2, el punto medio de [z, w] es i, por lo que el bisector perpen-dicular a [z, w] es el eje imaginario positivo. Mas aun, como esta isometrıafija el eje imaginario e intercambia z con w, los puntos del eje imaginariopositivo equidistan hiperbolicamente de z y w.
Falta probar solamente que no hay otros puntos equidistantes de z y w.Si u equidista de z y w, sea C1 el cırculo con centro en z y radio ρ(z, u),y sea C2 la imagen de C1, bajo la funcion z → −z. Finalmente, como lospuntos de interseccion de estos dos cırculos son los puntos equidistantes, sesigue que Re u = 0 (vease la Figura 4.5). �
w z
Figura 4.5: H-bisector perpendicular

4.1. REGIONES FUNDAMENTALES 137
Definicion 39 Sea A ⊂ H2, se dice que A es h-convexo, si ∀z, w ∈ A setiene que [z, w] ⊂ A, donde [z, w] denota el segmento de geodesica que unez con w.
Observese que un conjunto h-convexo es conexo (ejercicio) y que la inter-seccion de conjuntos h-convexos es h-convexo. Ademas, si l es una geodesica,entonces H2 − l consiste en dos semiplanos que son h-convexos; esto es evi-dente si l es el eje imaginario, el caso general se sigue, ya que PSL(2,R)es transitivo en geodesicas. Mas aun, estas observaciones implican tambienque la region comprendida entre dos rectas verticales (o dos geodesicas tan-gentes) es h-convexa. Ademas, cualquier triangulo hiperbolico es h-convexo,dado que es la interseccion de tres semiplanos.
0
wwn
z0
z zn
Figura 4.6: La cerradura de una region h-convexa es h-convexa
Proposicion 4.1.3 Sea A una region h-convexa, entonces A es h-convexa.
Demostracion. Si A no es h-convexa, existen z, w ∈ A, tal que
[z, w] 6⊂ A.
Podemos suponer, sin perder generalidad, que [z, w] es un segmento en el eje
imaginario. Bajo estas hipotesis, existe z0 ∈ [z, w], tal que z0 /∈ A. Ahora,
como (A)c es abierto, se puede construir un cuadrado R de lado ε con
centro en z0, tal que R ⊂ (A)c.
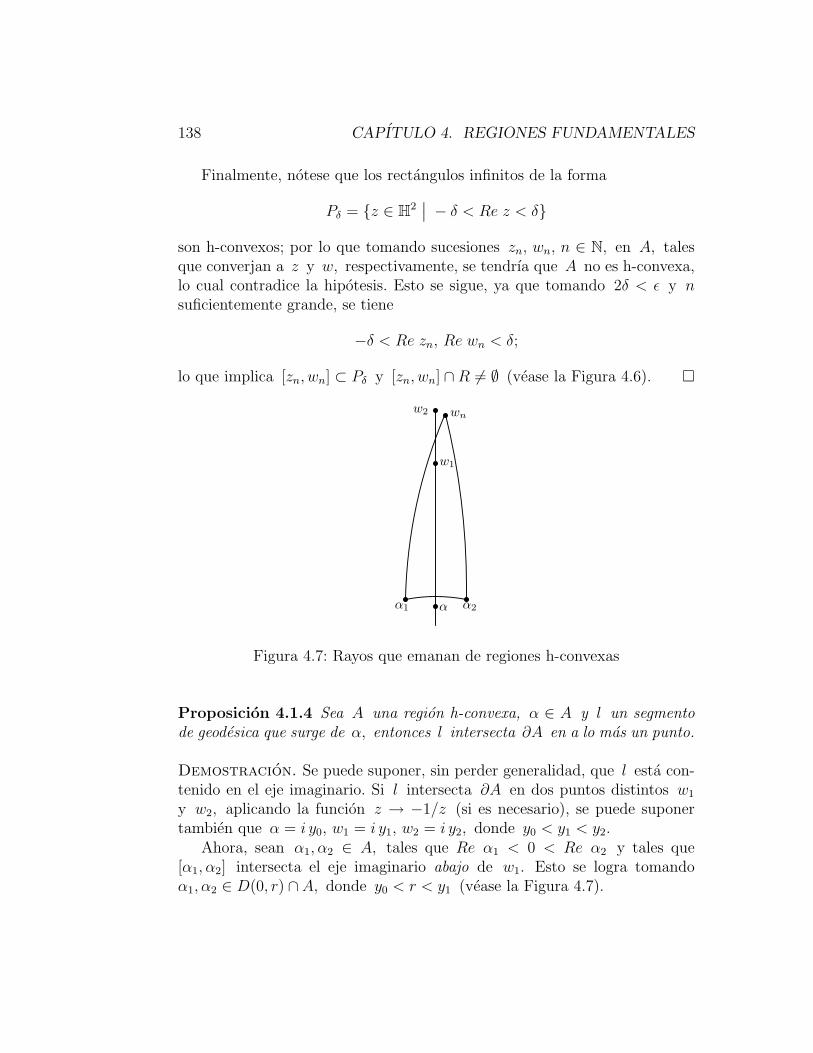
138 CAPITULO 4. REGIONES FUNDAMENTALES
Finalmente, notese que los rectangulos infinitos de la forma
Pδ = {z ∈ H2∣∣ − δ < Re z < δ}
son h-convexos; por lo que tomando sucesiones zn, wn, n ∈ N, en A, talesque converjan a z y w, respectivamente, se tendrıa que A no es h-convexa,lo cual contradice la hipotesis. Esto se sigue, ya que tomando 2δ < ε y nsuficientemente grande, se tiene
−δ < Re zn, Re wn < δ;
lo que implica [zn, wn] ⊂ Pδ y [zn, wn] ∩R 6= ∅ (vease la Figura 4.6). �
α1 α2α
w1
w2 wn
Figura 4.7: Rayos que emanan de regiones h-convexas
Proposicion 4.1.4 Sea A una region h-convexa, α ∈ A y l un segmentode geodesica que surge de α, entonces l intersecta ∂A en a lo mas un punto.
Demostracion. Se puede suponer, sin perder generalidad, que l esta con-tenido en el eje imaginario. Si l intersecta ∂A en dos puntos distintos w1
y w2, aplicando la funcion z → −1/z (si es necesario), se puede suponertambien que α = i y0, w1 = i y1, w2 = i y2, donde y0 < y1 < y2.
Ahora, sean α1, α2 ∈ A, tales que Re α1 < 0 < Re α2 y tales que[α1, α2] intersecta el eje imaginario abajo de w1. Esto se logra tomandoα1, α2 ∈ D(0, r) ∩ A, donde y0 < r < y1 (vease la Figura 4.7).

4.1. REGIONES FUNDAMENTALES 139
Tambien, existe una sucesion
wn = xn + iyn ∈ A, n ∈ N, n > 2,
tal que wn → w2, se puede tambien suponer que xn > 0 (el caso xn < 0 esanalogo). Notese que las ordenadas en el origen de las rectas euclideanas quepasan por α1 y wn estan dadas por
yn −(yn − v)
(xn − u)xn,
donde α1 = u + iv. Finalmente, si n → ∞, estos numeros convergen ay2; por lo que si n es suficientemente grande, estas rectas intersectan el ejeimaginario arriba de w1. En consecuencia, w1 esta en el interior del triangulohiperbolico determinado por α1, wn y α2, el cual esta contenido en A (yaque A es h-convexa), lo cual contradice la existencia de dichos puntos, w1
y w2. �
EJERCICIOS 4.1
1. Demuestre que un conjunto fundamental no puede ser abierto.
2. Sea Γ un subgrupo de PSL(2,R) que admite una region fundamental,demuestre que Γ es discontinuo.
3. Demuestre que el area hiperbolica de la region descrita en la Figura 4.4 esinfinita.
4. Pruebe que el area hiperbolica de una region de la forma Hn∩Rn es finita,donde Hn, Rn son las regiones descritas en la prueba del Teorema 4.1.1.
5. Demuestre que el area hiperbolica de un triangulo con un vertice infinitoy dos angulos positivos α, β esta dada por π − (α + β). Generalice esteresultado para cualquier triangulo.
6. Pruebe que el area hiperbolica de una region en H2 es invariante bajocualquier isometrıa hiperbolica.
7. Demuestre que un conjunto h-convexo en H2 es conexo.

140 CAPITULO 4. REGIONES FUNDAMENTALES
4.2. Construccion del polıgono de Dirichlet
En esta seccion se construyen los polıgonos de Dirichlet y se prueba que sonregiones fundamentales. Aunque la mayorıa de los resultados se establecenpara PSL(2,R), es facil verificar que estos se aplican tambien al disco dePoincare. Se exhiben tambien ejemplos de estos dominios fundamentales paralos grupos cıclicos. El siguiente resultado muestra la existencia de vecindadesque contienen a lo mas un punto por cada orbita.
Teorema 4.2.1 Sea Γ < PSL(2,R) discreto y w0 ∈ H2 un punto no fijo,esto es, T (z0) 6= z0 ∀ T ∈ Γ − I, entonces existe una vecindad abierta Dde w0 que no contiene puntos Γ-equivalentes, es decir, cada punto de Drepresenta una orbita distinta.
Demostracion. La orbita de w0 no se acumula en w0 ya que este es unpunto ordinario, por lo que existe un disco hiperbolico
Dh(w0, δ) = {z ∈ H2 | ρ(z, w0) < δ},
tal que no contiene puntos Γ-equivalentes a w0 (distintos de w0).Se afirma que el disco hiperbolico
D = Dh(w0, δ/2) = {z ∈ H2 | ρ(z, w0) < δ/2}
tiene la propiedad requerida. De otra manera, si existe T ∈ Γ, distinta de laidentidad, tal que w, T (w) ∈ Dh(w0, δ/2), entonces se sigue de la invariabili-dad de la metrica hiperbolica que ρ
(T (w), T (w0)
)≤ δ/2, lo cual a su vez
implica
ρ(w0, T (w0)
)≤ ρ
(w0, T (w)
)+ ρ
(T (w), T (w0)
)< δ/2 + δ/2,
que contradice la eleccion de δ. �
El teorema anterior implica la existencia de vecindades estables, con res-pecto a la accion de Γ, para cualquier punto en H2 (ejercicio). Dado unpunto w ∈ H2, una vecindad Nw de w es estable si para cualquier trans-formacion T ∈ Γ se tiene
T (Nw) ∩Nw = ∅, si T (w) 6= w;
T (Nw) = Nw, si T (w) = w.

4.2. CONSTRUCCION DEL POLIGONO DE DIRICHLET 141
En la siguiente discusion se tomara a Γ como un subgrupo discreto dePSL(2,R), w0 ∈ H2 no fijo, y
T n(w0) = wn, n ∈ N,
su orbita, es decir, T n, n ∈ N, es una enumeracion de los elementos de Γ.Notese que wn 6= wm, si n 6= m, esto se sigue, ya que de otra manera
T−1
m T n fija z0. Denotaremos por λi al bisector perpendicular del segmento[w0, wi]. Observese que H2−{λi} consiste en 2 semiplanos hiperbolicos, unoque contiene a w0, que denotaremos por Li, y otro que contiene a wi, alcual nos referiremos por L′i.
z
w0
z′
wi
Figura 4.8: Li ⊂ Ai
Lema 4.2.2 Sea Γ un subgrupo discreto de PSL(2,R), w0 ∈ H2 no fijo,wi, i ∈ N, la orbita de w0 y
Ai = {z ∈ H2 | ρ(z, w0) < ρ(z, wi)}, A′i = {z ∈ H2 | ρ(z, wi) < ρ(z, w0)},
entonces Li = Ai y L′i = A′i.
Demostracion. Se sigue de la Proposicion 4.1.2 que H2 es la union dis-junta de Ai ∪ λ ∪ A′
i . Tambien lo es de Li ∪ λ ∪ L′i. Por consiguiente bastaprobar que
Li ⊂ Ai
y queL′i ⊂ A′
i.
Ahora, si z ∈ Li, al trazar una geodesica de z a wi, esta intersecta λien un punto z′ y se tiene
ρ(z, w0) ≤ ρ(z, z′) + ρ(z′, w0) = ρ(z, z′) + ρ(z′, wi) = ρ(z, wi),
puesto que z′ equidista de w0 y wi (vease la Figura 4.8). Finalmente, elmismo argumento se aplica a puntos de L′i, lo cual prueba el lema. �

142 CAPITULO 4. REGIONES FUNDAMENTALES
Definicion 40 Sean Γ, w0 y Li, i ∈ N, como en el Lema 4.2.2; se defineel polıgono de Dirichlet para Γ con centro en w0 como
Dw0 =∞⋂i=1
Li.
Algunas veces escribiremos D0, o simplemente D, por Dw0 . Notese queel Lema 4.2.2 implica que D consiste en los puntos en H2 que estan estric-tamente mas cerca de w0 que de cualquier otra de sus imagenes, es decir,
D = {z ∈ H2 | ρ(z, w0) < ρ(z, wi) ∀i ∈ N}.
Observese que D es no vacio, ya que w0 ∈ D. El polıgono de Dirichlet D estambien h-convexo (y por lo tanto conexo), esto se sigue ya que es la inter-seccion de conjuntos h-convexos. Esta construccion se generaliza a cualquierdimension y tambien a otras geometrıas (cf. [20] pp. 243-246). Probamos aho-ra que D es una region fundamental para Γ. A los bisectores perpendicularesles llamaremos simplemente bisectores.
D(w0, r)
w0
wi
z
K
Figura 4.9: Un compacto intersecta un numero finito de bisectores
Lema 4.2.3 Sea D el polıgono de Dirichlet descrito en la Definicion 40 yK un subconjunto compacto en H2, entonces K intersecta solamente a unnumero finito de bisectores λi.
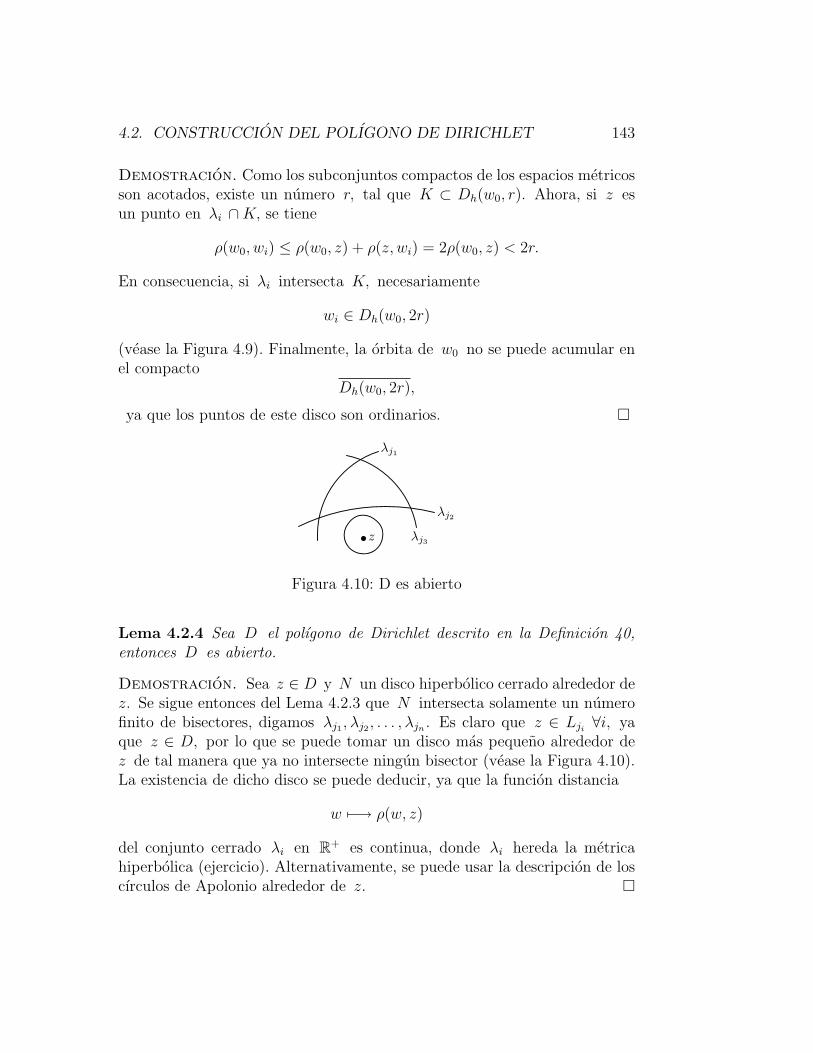
4.2. CONSTRUCCION DEL POLIGONO DE DIRICHLET 143
Demostracion. Como los subconjuntos compactos de los espacios metricosson acotados, existe un numero r, tal que K ⊂ Dh(w0, r). Ahora, si z esun punto en λi ∩K, se tiene
ρ(w0, wi) ≤ ρ(w0, z) + ρ(z, wi) = 2ρ(w0, z) < 2r.
En consecuencia, si λi intersecta K, necesariamente
wi ∈ Dh(w0, 2r)
(vease la Figura 4.9). Finalmente, la orbita de w0 no se puede acumular enel compacto
Dh(w0, 2r),
ya que los puntos de este disco son ordinarios. �
z
λj1
λj2
λj3
Figura 4.10: D es abierto
Lema 4.2.4 Sea D el polıgono de Dirichlet descrito en la Definicion 40,entonces D es abierto.
Demostracion. Sea z ∈ D y N un disco hiperbolico cerrado alrededor dez. Se sigue entonces del Lema 4.2.3 que N intersecta solamente un numerofinito de bisectores, digamos λj1 , λj2 , . . . , λjn . Es claro que z ∈ Lji ∀i, yaque z ∈ D, por lo que se puede tomar un disco mas pequeno alrededor dez de tal manera que ya no intersecte ningun bisector (vease la Figura 4.10).La existencia de dicho disco se puede deducir, ya que la funcion distancia
w 7−→ ρ(w, z)
del conjunto cerrado λi en R+ es continua, donde λi hereda la metricahiperbolica (ejercicio). Alternativamente, se puede usar la descripcion de loscırculos de Apolonio alrededor de z. �
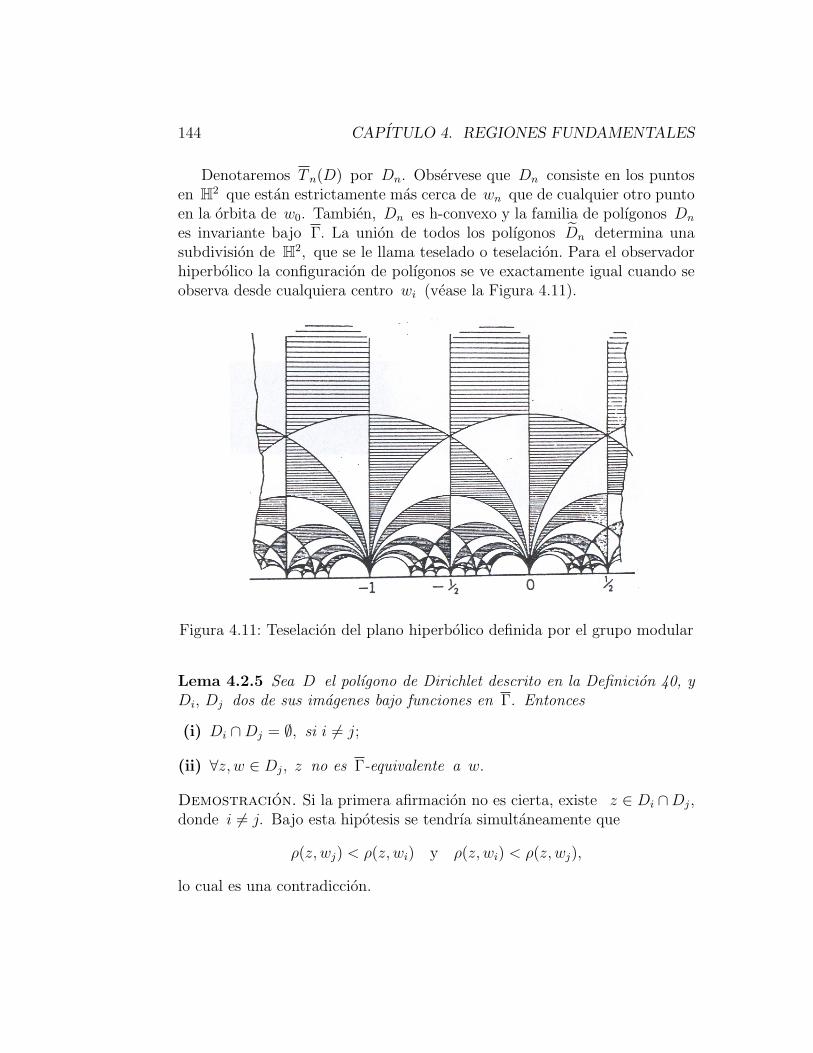
144 CAPITULO 4. REGIONES FUNDAMENTALES
Denotaremos T n(D) por Dn. Observese que Dn consiste en los puntosen H2 que estan estrictamente mas cerca de wn que de cualquier otro puntoen la orbita de w0. Tambien, Dn es h-convexo y la familia de polıgonos Dn
es invariante bajo Γ. La union de todos los polıgonos Dn determina unasubdivision de H2, que se le llama teselado o teselacion. Para el observadorhiperbolico la configuracion de polıgonos se ve exactamente igual cuando seobserva desde cualquiera centro wi (vease la Figura 4.11).
Figura 4.11: Teselacion del plano hiperbolico definida por el grupo modular
Lema 4.2.5 Sea D el polıgono de Dirichlet descrito en la Definicion 40, yDi, Dj dos de sus imagenes bajo funciones en Γ. Entonces
(i) Di ∩Dj = ∅, si i 6= j;
(ii) ∀z, w ∈ Dj, z no es Γ-equivalente a w.
Demostracion. Si la primera afirmacion no es cierta, existe z ∈ Di ∩Dj,donde i 6= j. Bajo esta hipotesis se tendrıa simultaneamente que
ρ(z, wj) < ρ(z, wi) y ρ(z, wi) < ρ(z, wj),
lo cual es una contradiccion.

4.2. CONSTRUCCION DEL POLIGONO DE DIRICHLET 145
Por otra parte, si existen z, w ∈ Dj, z 6= w y T (z) = w, T ∈ Γ,entonces como T transforma Dj en alguna Di, se tendrıa Di ∩Dj 6= ∅, locual contradice la primera afirmacion. Por consiguiente, se sigue tambien lasegunda parte del lema. �
De manera analoga al caso de Rn, en un espacio metrico X, un subcon-junto A subdivide a X en 3 subconjuntos ajenos, a saber, Int A, ∂A yExt A. Aplicando este principio al caso de H2 y al polıgono de Dirichlet D,al ser este un conjunto abierto, la subdivision inducida en H2 es D, ∂D (enH2) y Ext D. Como ya se menciono,
D = {z ∈ H2 | ρ(z, w0) < ρ(z, wi) ∀i}.
Tambien es claro que
{z ∈ H2 | ρ(z, wi) < ρ(z, w0) para al menos alguna i} ⊂ Ext D.
Esto ultimo se sigue, ya que L′i es abierto. El siguiente resultado describe∂D.
z
w0
DD
λj1
λj2
λjn
Figura 4.12: Bisectores por z
Lema 4.2.6 Sea D el polıgono de Dirichlet descrito en la Definicion 40,entonces la frontera de D consiste en los puntos z en H2 que satisfacen lassiguientes dos condiciones:
(i) ρ(z, w0) ≤ ρ(z, wi) ∀ i,
(ii) ρ(z, w0) = ρ(z, wj), para al menos una j.
Demostracion. Sea A el subconjunto de H2 determinado por las condi-ciones (i) y (ii), probamos primero que A es un subconjunto de ∂D. Si z ∈ Ay N es cualquier vecindad de z, hay que probar que N intersecta D. Se

146 CAPITULO 4. REGIONES FUNDAMENTALES
puede tomar N como un disco abierto y usando el Lema 4.2.3, como N escompacto, se puede tambien suponer que hay un numero finito de bisectoresque intersectan N y que todos estos pasan por z.
Es claro que z ∈ Li ∀ i, por lo que [w0, z] es un arco en Li ∀ i (Proposi-cion 4.1.3). Tambien, usando la Proposicion 4.1.4 se tiene que el segmentode geodesica abierto en [w0, z] esta contenido en Li ∀ i.
Por consiguiente
{[w0, z]− {z}} ⊂ D.
Como tambien {[w0, z]− {z}} ∩N 6= ∅, se sigue que
D ∩N 6= ∅
y los puntos en el conjunto A pertenecen a la frontera (vease la Figura 4.12).Viceversa, si z ∈ ∂D, como z /∈ Ext D se debe cumplir que
ρ(z, w0) ≤ ρ(z, wi) ∀ i.
De otra manera, si ρ(z, w0) > ρ(z, wi), entonces z ∈ L′i, y existe una vecin-dad de z contenida en L′i, por lo que z /∈ ∂D.
Finalmente, si la desigualdad ρ(z, w0) ≤ ρ(z, wi) es estricta ∀ i, entoncesz ∈ D; por lo que ρ(z, w0) = ρ(z, wi), para al menos alguna i. �
Corolario 4.2.7 Sea D el polıgono de Dirichlet descrito en la Definicion40, entonces
Ext D = {z ∈ H2 | ρ(z, wi) < ρ(z, w0), para al menos alguna i}.
Demostracion. Se tiene que
ρ(z, w0) ≤ ρ(z, wi) ∀ i
si y solo si
z ∈ D ∪ ∂D.
�
Teorema 4.2.8 Sea Γ un subgrupo discreto de PSL(2,R), entonces supolıgono de Dirichlet D es una region fundamental para Γ.

4.2. CONSTRUCCION DEL POLIGONO DE DIRICHLET 147
Demostracion. Se sigue del Lema 4.2.5 que cualesquiera dos puntos enD no son Γ− equivalentes. Hay que probar tambien que
H2 =⋃n∈N
T n(D) =⋃n∈N
Dn.
Para esto, sea z ∈ H2, como la orbita de w0 no se acumula con H2,existe un punto wj cuya distancia a z es menor o igual a la distancia decualquier otro punto en la orbita a z, es decir
ρ(z, wj) ≤ ρ(z, wi) ∀ i.
Ahora, si T j(w0) = wj y T−1
j (z) = z′, se sigue de la invariabilidad de lametrica que
ρ(z′, w0) ≤ ρ(z′, wk) ∀ k;
lo cual significa, en virtud del Lema 4.2.6, que z′ ∈ D.Finalmente, las geodesicas en H2 tienen medida bidimensional cero, y
como ∂D esta contenida en una union numerable de geodesicas, se sigue quetiene medida cero. �
Notese que el Teorema 4.2.8 muestra que los polıgonos Di son tambien deDirichlet para Γ (ejercicio). Recordamos del capıtulo de metrica hiperbolicaque la distancia de un punto z a una geodesica λ se alcanza trazando unasegunda geodesica que pasa por z y es ortogonal a λ (vease la Figura 2.7).Usando este hecho, para el caso particular descrito en la Definicion 40, si λjes el bisector perpendicular de [w0, wj], se tiene que
ρ(w0, λj) =1
2ρ(w0, wj).
A continuacion mostramos una propiedad de los polıgonos de Dirichlet; a losdominios fundamentales que cumplen esta propiedad se les llama localmentefinitos.
Proposicion 4.2.9 Sea D el polıgono de Dirichlet de un subgrupo Γ dePSL(2,R) y K un compacto en H2, entonces K intersecta solamente un
numero finito de imagenes de D (bajo elementos de Γ).
Demostracion. Usamos la notacion del Lema 4.2.5. Podemos suponerque el compacto es un disco hiperbolico con centro en w0, que denota-mos por Dh(w0, r). Esto se sigue, ya que si r es suficientemente grande,

148 CAPITULO 4. REGIONES FUNDAMENTALES
K ⊂ Dh(w0, r), y si Dh(w0, r) intersecta un numero finito de polıgonos,tambien K tiene esta propiedad.
Ahora, como
1
2ρ(w0, wj) = ρ(w0, λj) ≤ ρ(w0, Dj),
si z ∈ Dj∩Dh(w0, r), entonces el punto medio de [w0, wj] esta en Dh(w0, r).En consecuencia, wj ∈ Dh(w0, 2r). Finalmente, como la orbita de w0 no seacumula en Dh(w0, 2r) se sigue el resultado (vease la Figura 4.13). �
Dj
λj
w0
Figura 4.13: Los compactos intersectan un numero finito de polıgonos
D Dk
T kz′
w0
z
wk
Figura 4.14: Los compactos intersectan un numero finito de polıgonos
Exhibimos ahora una segunda prueba de la Proposicion 4.2.9. Sea r talque K ⊂ Dh(w0, r). Si Dk intersecta K en un punto z, entonces existe un
z′ ∈ D, tal que T k(z′) = z. Tomando T k(wj) = w0, se tiene
ρ(w0, wj) ≤ ρ(w0, z′) + ρ(z′, wj) ≤ 2ρ(z′, wj)
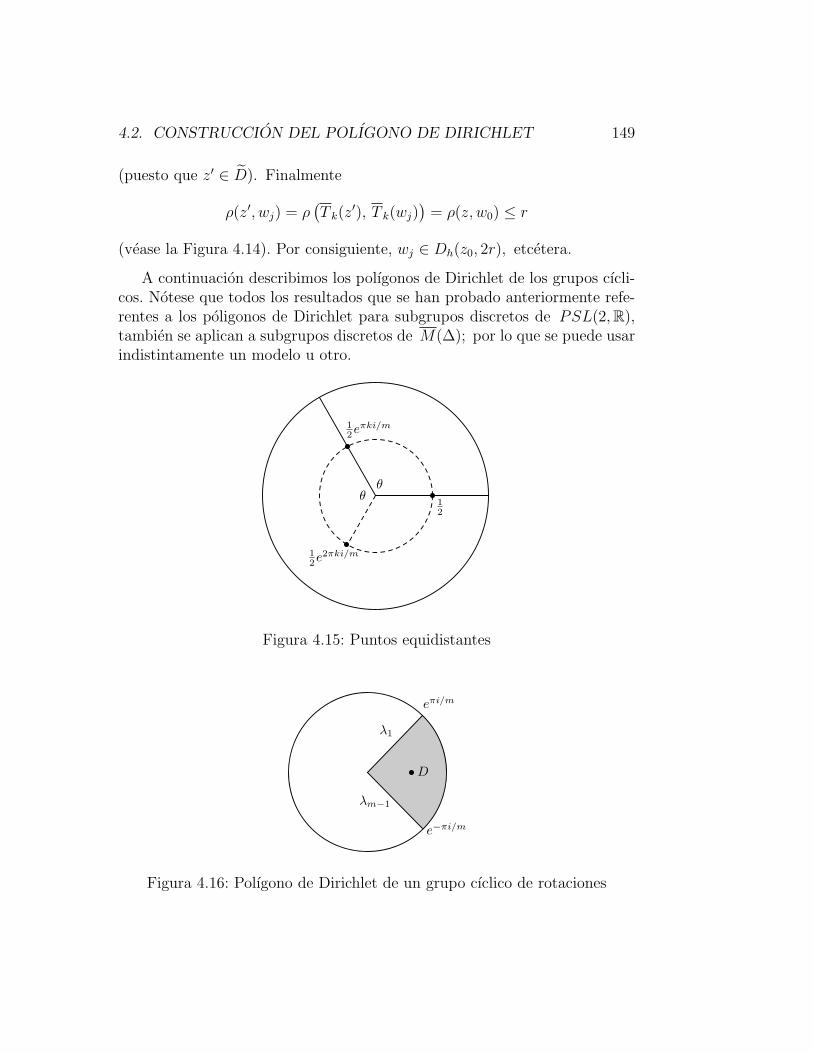
4.2. CONSTRUCCION DEL POLIGONO DE DIRICHLET 149
(puesto que z′ ∈ D). Finalmente
ρ(z′, wj) = ρ(T k(z
′), T k(wj))
= ρ(z, w0) ≤ r
(vease la Figura 4.14). Por consiguiente, wj ∈ Dh(z0, 2r), etcetera.
A continuacion describimos los polıgonos de Dirichlet de los grupos cıcli-cos. Notese que todos los resultados que se han probado anteriormente refe-rentes a los poligonos de Dirichlet para subgrupos discretos de PSL(2,R),tambien se aplican a subgrupos discretos de M(∆); por lo que se puede usarindistintamente un modelo u otro.
θ
θ1
2
1
2eπki/m
1
2e2πki/m
Figura 4.15: Puntos equidistantes
D
λ1
λm−1
eπi/m
e−πi/m
Figura 4.16: Polıgono de Dirichlet de un grupo cıclico de rotaciones
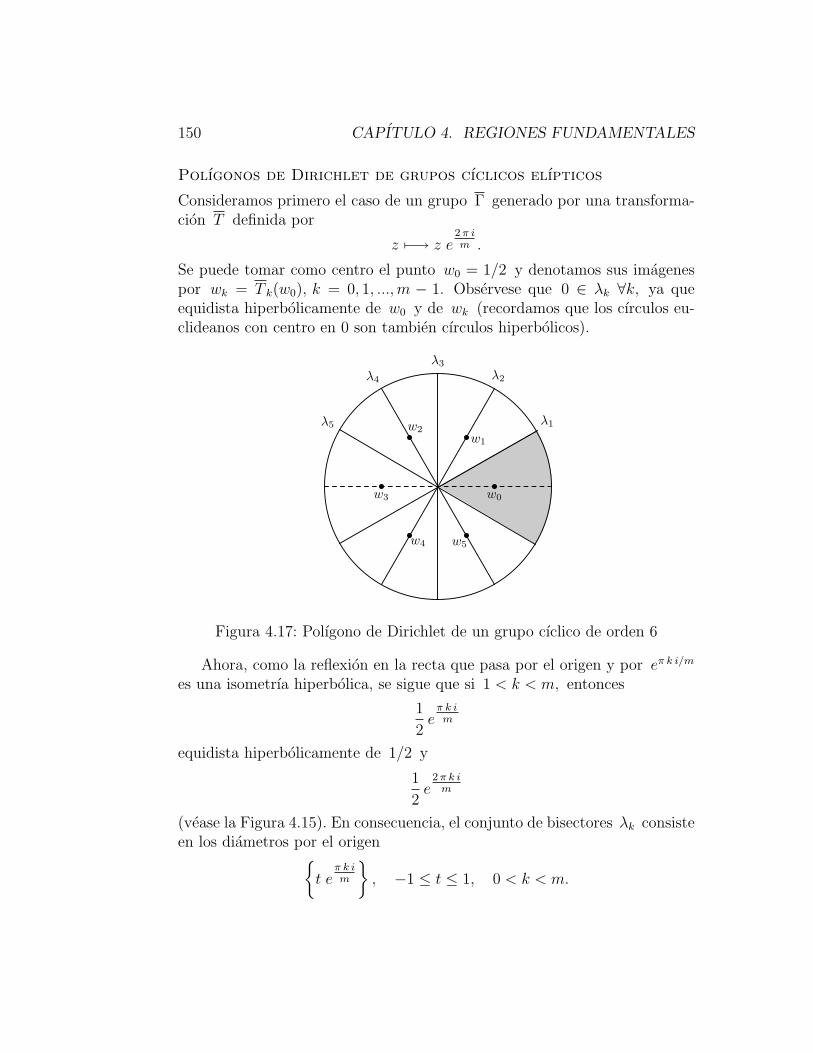
150 CAPITULO 4. REGIONES FUNDAMENTALES
Polıgonos de Dirichlet de grupos cıclicos elıpticos
Consideramos primero el caso de un grupo Γ generado por una transforma-cion T definida por
z 7−→ z e2π im .
Se puede tomar como centro el punto w0 = 1/2 y denotamos sus imagenespor wk = T k(w0), k = 0, 1, ...,m − 1. Observese que 0 ∈ λk ∀k, ya queequidista hiperbolicamente de w0 y de wk (recordamos que los cırculos eu-clideanos con centro en 0 son tambien cırculos hiperbolicos).
λ1
λ2
λ3
λ4
λ5
w0
w1
w2
w3
w4 w5
Figura 4.17: Polıgono de Dirichlet de un grupo cıclico de orden 6
Ahora, como la reflexion en la recta que pasa por el origen y por eπ k i/m
es una isometrıa hiperbolica, se sigue que si 1 < k < m, entonces
1
2eπ k im
equidista hiperbolicamente de 1/2 y
1
2e
2π k im
(vease la Figura 4.15). En consecuencia, el conjunto de bisectores λk consisteen los diametros por el origen{
t eπ k im
}, −1 ≤ t ≤ 1, 0 < k < m.

4.2. CONSTRUCCION DEL POLIGONO DE DIRICHLET 151
Por lo tanto, D es el sector delimitado por los radios
t eπ im , 0 ≤ t ≤ 1 y t e
π i (m−1)m , −1 ≤ t ≤ 0
(vease las Figuras 4.16 y 4.17). Esto se sigue, ya que
π
(m− 1
m
)+ π ≡ − π
mmod 2π,
y si 1 < k < m, entonces
π
(m− k
m
)+ π ≡ −kπ
mmod 2π.
Lo que implica que ningun bisector λk intersecta dicha region D.
θ
w0
Figura 4.18: Polıgono de Dirichlet de un grupo cıclico finito
El caso general se sigue de la invariabilidad de los polıgonos de Dirich-let bajo conjugacion. En particular, si Γ es un grupo cıclico de rotaciones,D ⊂ ∆ es su polıgono de Dirichlet con centro en w y f es la funcion deCayley, se tiene que f(D) es el polıgono de Dirichlet con centro en f(w)
del grupo f Γ f−1
que actua en H2. Dejamos la verificacion de estas afir-maciones como ejercicio. En consecuencia, el polıgono de Dirichlet de ungrupo cıclico actuando en H2 es exactamente como en la Figura 4.18. Acontinuacion probamos un resultado sobre la invariabilidad de los conjuntosfundamentales bajo la conjugacion.

152 CAPITULO 4. REGIONES FUNDAMENTALES
Proposicion 4.2.10 Sea Γ un subgrupo de PSL(2,C) actuando en un sub-conjunto P de la esfera de Riemann y F un conjunto fundamental paraesta accion, supongase tambien que ϕ es una transformacion compleja deMobius, entonces el conjunto ϕ(F ) es fundamental para la accion del grupoΓ ′ = ϕΓϕ−1 actuando en ϕ(P ).
Demostracion. Si ϕ(z), ϕ(w) son puntos Γ ′− equivalentes en ϕ(F ), en-tonces existe ϕT ϕ−1 ∈ Γ ′, tal que
ϕT ϕ−1 (ϕ(z)) = ϕ(w).
En este caso T (z) = w, lo cual implica z = w (ya que F es fundamental).Por ultimo, sea ϕ(w) ∈ ϕ(P ). Como F es fundamental, se tiene que hay
un punto z ∈ F, tal que T (z) = w, donde T ∈ Γ. Por lo tanto
ϕT ϕ−1(ϕ(z)
)= ϕ(w)
y ϕ(z) es Γ ′ − equivalente a ϕ(w). �
La proposicion anterior se puede generalizar a regiones fundamentales desubgrupos discretos de PSL(2,R), por ejemplo, si la frontera esta contenidaen una union a lo sumo numerable de geodesicas. Esto se sigue facilmente delas propiedades de los elementos de PSL(2,C).
w0 m wk
λk
i
Figura 4.19: Bisector perpendicular entre w0 y wk
Polıgonos de Dirichlet de grupos cıclicos parabolicos
Consideramos primero el caso del grupo de traslaciones
Γ =< T >, T (z) = z + 1.

4.2. CONSTRUCCION DEL POLIGONO DE DIRICHLET 153
Se puede tomar como centro del polıgono el punto w0 = i+ 1/2. Ahora,el bisector perpendicular a w0 y
wk = i+1
2+ k, k ∈ Z, k 6= 0,
es la recta vertical que pasa por
m = i+k + 1
2,
el punto medio euclideano entre w0 y wk (vease la Figura 4.19). Esto sesigue, ya que como la reflexion en la recta Re z = m es una isometrıahiperbolica, se tiene que los puntos de dicha recta equidistan hiperbolica-mente de w0 y de wk.
Es claro entonces que el polıgono de Dirichlet con centro en i + 1/2consiste en el rectangulo infinito R∞ determinado por 0, 1 e ∞. Esto sesigue, ya que como los bisectores son las rectas verticales
λk =
{z ∈ H2
∣∣∣Re z =k + 1
2
},
se tiene λ1 = {z ∈ H2 | Re z = 1} y λ−1 = {z ∈ H2 | Re z = 0}. Noteseque los bisectores λk, k 6= 1,−1, no intersectan R∞ (vease la Figura 4.20).
Observese que cada bisector es ortogonal a todos los horociclos. Conju-gando, el caso general se sigue de manera analoga al caso elıptico (vease laFigura 4.21).
0 1 2 3
λ1 λ2 λ3λ−1
w0 w1 w2
Figura 4.20: Polıgono de Dirichlet para un grupo de traslaciones
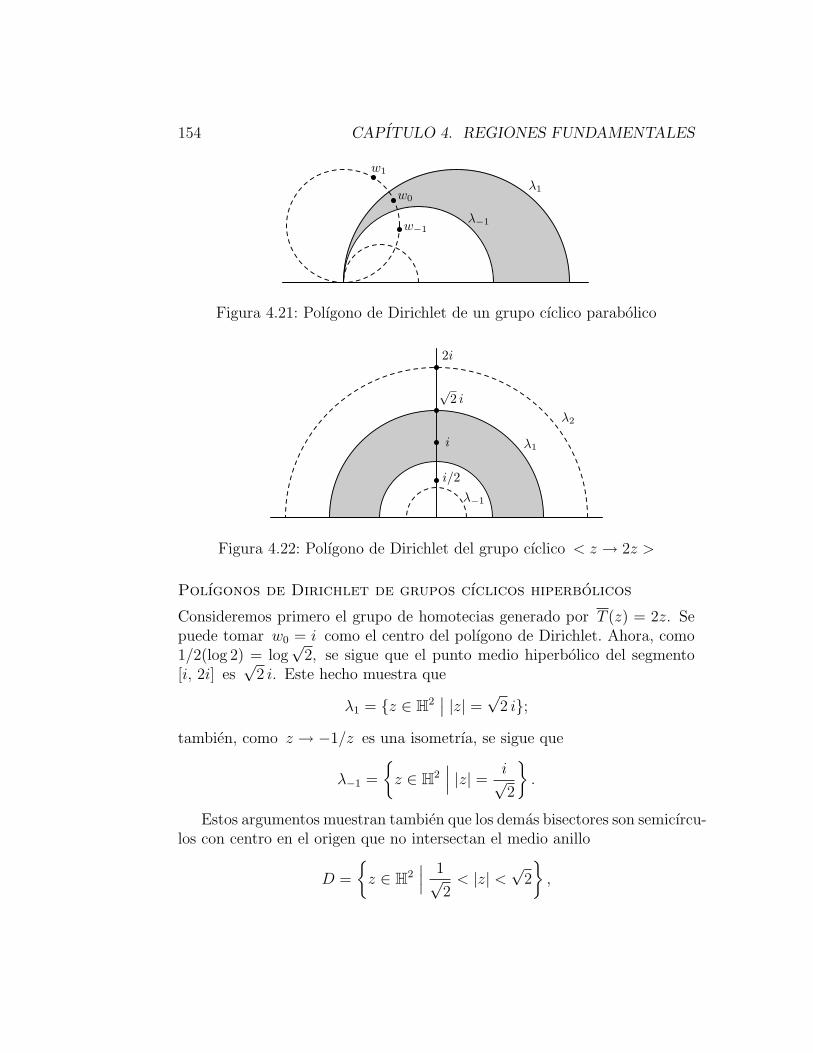
154 CAPITULO 4. REGIONES FUNDAMENTALES
λ−1
λ1w0
w1
w−1
Figura 4.21: Polıgono de Dirichlet de un grupo cıclico parabolico
λ2
i/2
i
√
2 i
2i
λ−1
λ1
Figura 4.22: Polıgono de Dirichlet del grupo cıclico < z → 2z >
Polıgonos de Dirichlet de grupos cıclicos hiperbolicos
Consideremos primero el grupo de homotecias generado por T (z) = 2z. Sepuede tomar w0 = i como el centro del polıgono de Dirichlet. Ahora, como1/2(log 2) = log
√2, se sigue que el punto medio hiperbolico del segmento
[i, 2i] es√
2 i. Este hecho muestra que
λ1 = {z ∈ H2∣∣ |z| = √
2 i};
tambien, como z → −1/z es una isometrıa, se sigue que
λ−1 =
{z ∈ H2
∣∣∣ |z| = i√2
}.
Estos argumentos muestran tambien que los demas bisectores son semicırcu-los con centro en el origen que no intersectan el medio anillo
D =
{z ∈ H2
∣∣∣ 1√2< |z| <
√2
},
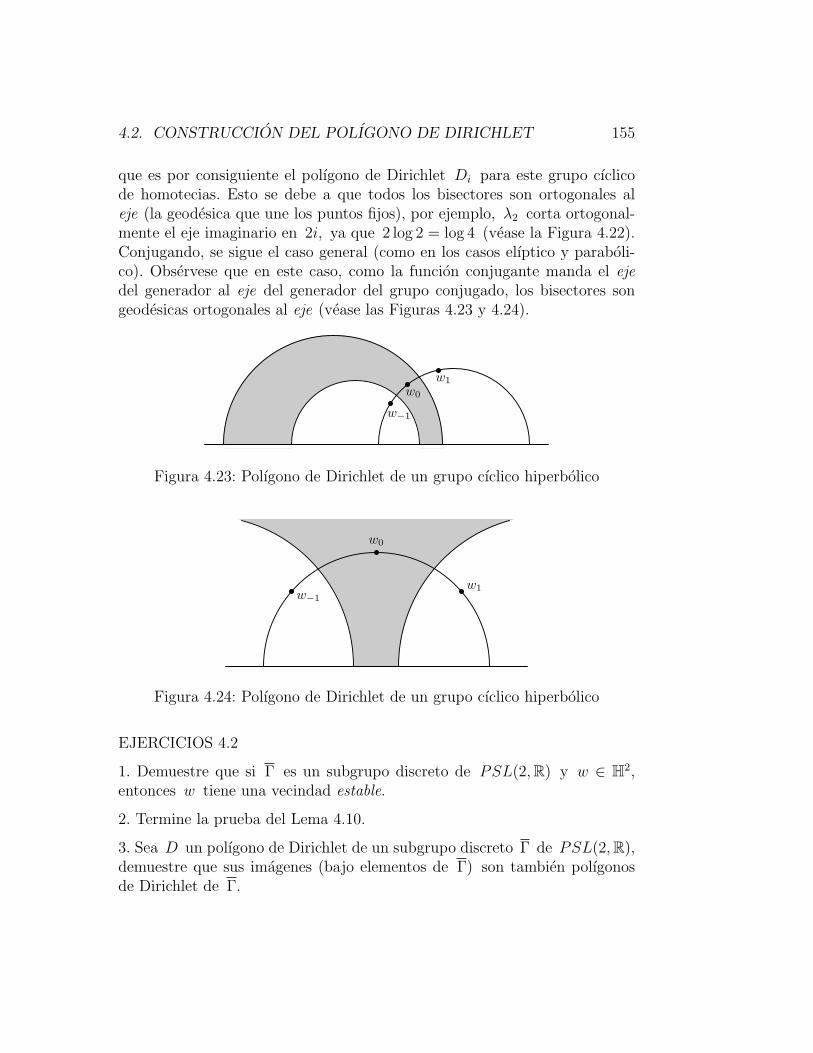
4.2. CONSTRUCCION DEL POLIGONO DE DIRICHLET 155
que es por consiguiente el polıgono de Dirichlet Di para este grupo cıclicode homotecias. Esto se debe a que todos los bisectores son ortogonales aleje (la geodesica que une los puntos fijos), por ejemplo, λ2 corta ortogonal-mente el eje imaginario en 2i, ya que 2 log 2 = log 4 (vease la Figura 4.22).Conjugando, se sigue el caso general (como en los casos elıptico y paraboli-co). Observese que en este caso, como la funcion conjugante manda el ejedel generador al eje del generador del grupo conjugado, los bisectores songeodesicas ortogonales al eje (vease las Figuras 4.23 y 4.24).
w0
w1
w−1
Figura 4.23: Polıgono de Dirichlet de un grupo cıclico hiperbolico
w0
w1
w−1
Figura 4.24: Polıgono de Dirichlet de un grupo cıclico hiperbolico
EJERCICIOS 4.2
1. Demuestre que si Γ es un subgrupo discreto de PSL(2,R) y w ∈ H2,entonces w tiene una vecindad estable.
2. Termine la prueba del Lema 4.10.
3. Sea D un polıgono de Dirichlet de un subgrupo discreto Γ de PSL(2,R),demuestre que sus imagenes (bajo elementos de Γ) son tambien polıgonosde Dirichlet de Γ.

156 CAPITULO 4. REGIONES FUNDAMENTALES
4. Sea Γ un subgrupo discreto de M(∆) y D su polıgono de Dirichlet concentro en w, demuestre que ϕ(D) es el polıgono de Dirichlet con centro enϕ(w) del grupo conjugado ϕΓϕ−1, donde ϕ ∈ PSL(2,C) transforma ∆en H2 (o preserva ∆).
4.3. Polıgono de Ford
En casos menos canonicos es difıcil construir los polıgonos de Dirichlet, yaque no es facil detectar la familia de todos los bisectores. Mostraremos otraconstruccion atribuida a Ford que establece otras tecnicas mas apropiadaspara construir regiones fundamentales. El siguiente resultado describe lasentradas inferiores izquierdas de las matrices que definen subgrupos discre-tos de PSL(2,R), que contienen traslaciones; estos numeros, como veremosposteriormente, tienen un importante significado geometrico.
Lema 4.3.1 Sea Γ un grupo discreto de SL(2,R) que contiene matricesque definen traslaciones. Entonces no existe ninguna sucesion de matricesdistintas
Tn =
(an bncn dn
)∈ Γ, n ∈ N,
de tal manera que cn → α, α finito.
Observese que el lema implica que existe m > 0, tal que para toda
T =
(a bc d
)∈ Γ
se tiene |c| ≥ m, o c = 0.
Demostracion. Como Γ∞, el grupo estabilizador de ∞, es cıclico, existeuna matriz
T =
(1 λ0 1
)∈ Γ, λ > 0,
tal que su correspondiente transformacion T genera Γ∞.Si el lema no se cumple, existe una sucesion
Tn =
(an bncn dn
)∈ Γ, n ∈ N,

4.3. POLIGONO DE FORD 157
tal que cn → α. Reemplazando −Tn por Tn, si es necesario, se puedesuponer que α ≥ 0, y que los numeros cn son todos distintos entre sı y sontodos positivos. Ahora, si pn, qn ∈ Z, se tiene que
T pn Tn Tqn =
(1 pnλ0 1
) (an bncn dn
) (1 qnλ0 1
)
=
(an + pn(λcn) bn + pn(λdn)
cn dn
) (1 qnλ0 1
)=
(an + pn(λcn) ∗
cn dn + qn(λcn)
).
Resulta que para cada n ∈ N se pueden elegir pn, qn ∈ Z, de tal maneraque
1 ≤ an + pn(λcn) < 1 + λ cn y 1 ≤ dn + qn(λcn) < 1 + λ cn. (4.1)
Dejamos la verificacion de este hecho como ejercicio. Habiendo elegido paracada natural n los enteros pn, qn ∈ Z, que cumplen las desigualdades (4.1),se obtiene una sucesion de matrices que denotamos por
Bn =
(αn βncn δn
)= T pn Tn T
qn , n ∈ N.
Observese que todas estas matrices son distintas, ya que las entradas cn loson. Bajo esta nueva notacion se tiene
1 ≤ αn < 1 + λ cn y 1 ≤ δn < 1 + λ cn. (4.2)
Finalmente, estas desigualdades implican que
1 ≤ αn δn ≤ 1 + 2λcn + λ2c2n
y
0 ≤ βn =αnδn − 1
cn≤ 2λ+ λ2cn.
Sin embargo, esta ultima desigualdad junto con (4.2) implica que las matricesBn, n ∈ N, estan acotadas, lo cual contradice que Γ es discreto. �
A continuacion probaremos que las transformaciones de Mobius que nofijan ∞, actuan euclidianamente en un unico cırculo llamado isometrico.

158 CAPITULO 4. REGIONES FUNDAMENTALES
Definicion 41 Sea
T (z) =az + b
cz + d, ad− bc = 1, c 6= 0,
una transformacion en PSL(2,C), se define el cırculo isometrico de T ,denotado por I(T ), como
{z ∈ C | |T ′(z)| = 1}.
Esto es, el cırculo isometrico consiste de aquellos puntos donde la nor-ma de la derivada es 1; equivalentemente, este conjunto consiste en aquellospuntos donde el factor de conformalidad es 1. Existe una util relacion ex-plıcita para el cırculo isometrico en terminos de las entradas inferiores de lamatriz
I(T ) =
{z ∈ C
∣∣∣∣∣ ∣∣∣z − (−dc
) ∣∣∣ =1
|c|
}.
Esto se sigue, ya que T ′(z) =1
(cz + d)2.
Proposicion 4.3.2 Sea T ∈ PSL(2,C), T (z) =az + b
cz + d, ad−bc = 1, c 6= 0,
entonces T actua euclidianamente en I(T ).
Demostracion. Sean z, w ∈ I(T ), entonces
| T (z)− T (w)| =∣∣∣∣az + b
cz + d− aw + b
cw + d
∣∣∣∣=
∣∣∣∣(az + b)(cw + d)− (aw + b)(cz + d)
(cz + d)(cw + d)
∣∣∣∣= |azd+ bcw − awd− bcz| = |z − w|.
�
Resulta tambien que el cırculo isometrico es el unico cırculo donde unatransformacion de Mobius compleja (que no fija ∞ ) actua euclidianamente.Esto se sigue, ya que si
T (z) =az + b
cz + d, ad− bc = 1, c 6= 0,

4.3. POLIGONO DE FORD 159
actua euclidianamente en otro cırculo K, tomando un punto z ∈ K − I(T ),y una sucesion de puntos wn ∈ K, tales que convergen a z, se tendrıa
lımwn→z
∣∣∣∣T (z)− T (wn)
z − wn
∣∣∣∣ = 1
y |T ′(z)| = 1, lo cual implicarıa z ∈ I(T ). El siguiente importante resul-tado exhibe como el cırculo isometrico describe la accion geometrica de unatransformacion de Mobius.
I(T
)I(T−1)
T
Figura 4.25: Accion de una transformacion hiperbolica o loxodromica en elcırculo isometrico
Teorema 4.3.3 Sea T una transformacion en PSL(2,C) que no fija a ∞.Entonces
(i) T(I(T )
)= I
(T−1
);
(ii) T(Int I(T )
)= Ext
(I
(T−1
));
(iii) T(Ext I(T )
)= Int
(I
(T−1
)).
Demostracion. Sea z ∈ C, z 6= −d/c, se sigue de la regla de la cadenaque (
T−1
)′(T (z)) T ′(z) = 1. (4.3)
Ahora, como
T ′(z) =1
(cz + d)2,

160 CAPITULO 4. REGIONES FUNDAMENTALES
se tiene por conexidad que
z ∈ Ext I(T ) ⇐⇒ |T ′(z)| < 1.
En consecuencia, se sigue de (4.3) que
z ∈ Int I(T ) ⇐⇒ T (z) ∈ Ext I(T−1
)y que
z ∈ I(T ) ⇐⇒ T (z) ∈ I(T−1
),
etcetera. �
Estos hechos se cumplen tambien en cualquier dimension. Para aquellastransformaciones de Mobius en GM(Rn) que no fijan ∞ se define la esferaisometrica como aquellos puntos donde el factor de conformalidad del jaco-biano de la transformacion es 1. Resulta, como en el caso bidimensional, queestos puntos son en efecto una esfera de codimension 1; mas aun, todas lasobservaciones y resultados que hemos mencionado para el caso de PSL(2,C),
tambien se cumplen para transformaciones enGM(Rn) (cf. [2] pp. 41 y 42).A manera de conclusion del texto, mostramos la construccion del polıgono
de Ford para grupos con traslaciones, y aplicamos estos resultados para ex-hibir una region fundamental del grupo clasico modular, que es a la vez unpolıgono de Ford y tambien uno de Dirichlet. En realidad, ambos polıgonos,el de Dirichlet y el de Ford, se pueden considerar como distintos casos dela misma construccion (polıgono de Dirichlet generalizado). Vease [2] pp.234-239.
Definicion 42 Sea Γ un subgrupo discreto de PSL(2,R) con traslaciones,se define el polıgono de Ford para Γ, determinado por λ ∈ R, como
R = R∞⋂ ⋂
T ∈Γ−Γ∞
Ext I(T )
,
donde
R∞ = {z ∈ H2 | λ < Re z < λ+ µ}
y z → z + µ es un generador de Γ∞.

4.3. POLIGONO DE FORD 161
Notese que bajo las hipotesis de la definicion anterior, el Lema 4.3.1 im-plica que los radios de los cırculos isometricos, de las transformaciones delgrupo que no son traslaciones, convergen a 0. Esto se sigue, ya que dadom > 0, solo existe un numero finito de transformaciones T ∈ Γ− Γ∞,
T (z) =az + b
cz + d,
tales que |c| ≤ 1/m, o1
|c|≥ m.
Por consiguiente, el conjunto R es no vacıo. Mas aun, el polıgono R es unconjunto abierto h-convexo y por lo tanto conexo. Esto se sigue, ya que esinterseccion de semiplanos.
Teorema 4.3.4 Sean R y Γ como en la definicion anterior, entonces R esuna region fundamental para Γ.
Demostracion. Probamos primero que no hay puntos Γ − equivalentesen R. Para esto, sea z ∈ R y T ∈ Γ. Si T ∈ Γ∞, T 6= Id, entonces Ttraslada z fuera de R∞, y por lo tanto T (z) /∈ R. Por otra parte, si T nofija ∞, como z ∈ Ext I(T ), se sigue que
T (z) ∈ Int I(T−1
),
esto es, T (z) /∈ R.Observese que si
w ∈ ∂R y Re w 6= λ, λ+ µ,
entonces w esta contenido en la cerradura del exterior de cualquier cırculoisometrico. Esta afirmacion se sigue, ya que si w ∈ Int I(T ) para alguna T ,entonces existe una vecindad de w ajena a R. Notese tambien que como losradios de los cırculos isometricos convergen a 0, solamente hay un numerofinito de cırculos isometricos que pasan por w.
Probamos ahora que cualquier z0 ∈ H2 es Γ − equivalente a un puntoen R. Si z0 ∈ R∞, escribimos z1 = z0, de otra manera, trasladamos z0 aun punto z1 ∈ R∞. Ahora, si z1 /∈ R, entonces z1 ∈ Int I(T 1), donde estatransformacion T 1 esta definida por una matriz
T1 =
(a1 b1c1 d1
).

162 CAPITULO 4. REGIONES FUNDAMENTALES
Notese que el punto z2 = T 1(z1) satisface
Im z2 =Im z1
|c1z1 + d1|2> Im z1.
Por otra parte, si z1 ∈ R, se sigue el teorema; de otra manera, el siguientepaso es trasladar z2 a un punto z3 ∈ R∞, (si z2 ∈ R∞, se toma z2 = z3),
si z3 no esta en R, entonces z3 ∈ Int I(T 2), etcetera.De esta modo, se obtiene una sucesion de puntos Γ− equivalentes
z0, z1, z2, . . . , zn,
tales que los numeros de la forma z2n+1, n ∈ N, estan en R∞ y
Im z0 = Im z1 < Im z2 = Im z3 < Im z4 = . . .
Finalmente, esta sucesion es necesariamente finita. Esto se sigue, ya queel Lema 4.3.1 implica que existe una cota superior a los radios de los cırculosisometricos, digamos s. Por lo cual si z ∈ R∞ y Im z > s, necesariamentez ∈ R. En consecuencia, como el rectangulo
R∞⋂
{z ∈ H2 | Im z0 ≤ Im z ≤ s}
contiene solamente puntos ordinarios, la sucesion z2n+1, n ∈ N, no se puedeacumular en dicho rectangulo compacto; por lo que necesariamente existe n,tal que z2n+1 ∈ R y z0 es Γ− equivalente a un punto de R. �
Para ilustrar estas ideas exhibimos una region de Ford para el grupoclasico modular PSL(2,Z), denotaremos a este grupo por Γ. Notese que
T =
(1 10 1
)genera Γ∞. Tambien, se puede tomar el rectangulo R∞ como
{z ∈ H2 | − 1/2 < Re z < 1/2}.
Observese tambien que los cırculos isometricos de mayor radio euclidianotienen radio 1 y que los centros de estos cırculos son precisamente los enteros.Esto se sigue, ya que ∀ d ∈ Z existe(
a b1 −d
)∈ SL(2,Z).

4.3. POLIGONO DE FORD 163
De estos cırculos euclidianamente mayores, solo los que tienen centros en−1, 0, 1 intersectan a R∞ (vease la Figura 4.26).
Ahora, la interseccion de los cırculos |z − 1| = 1 y |z| = 1 en H2 esun punto que denotamos por ρ. Este punto del cırculo unitario satisface laecuacion (ρ− 1)(ρ− 1) = 1, por lo que Re ρ = 1/2 y
ρ =1
2+ i
√3
2= e
π i3 .
Reflejando en el eje imaginario, se tiene el otro vertice
−ρ = −e−π i
3 = e2π i3 =
−1
2+ i
√3
2.
En consecuencia, los otros cırculos isometricos de radio menor a 1 nointersectan la region delimitada por las rectas Re z = ±1/2, que es exterioral cırculo |z| = 1. Es decir, esta region, que denotamos por R, es un polıgonode Ford para el grupo modular. Esto se sigue, ya que los radios de estoscırculos son 1/n, n ≥ 2. Vease la Figura 4.26.
ρ = e
π i
3
0 1 2−1−2
−ρ
Figura 4.26: Una region fundamental de Dirichlet y Ford del grupo clasicomodular
Resulta que el polıgono de Ford que acabamos de describir, es tambien elpolıgono de Dirichlet con centro en 2i. Para probar esta afirmacion, observeseprimero que 2 i no es un punto fijo. Una manera de probar esta afirmaciones usando la formula de los puntos fijos, dado que la parte imaginaria y deun punto fijo elıptico esta dada por√
4− χ2
2|c|.
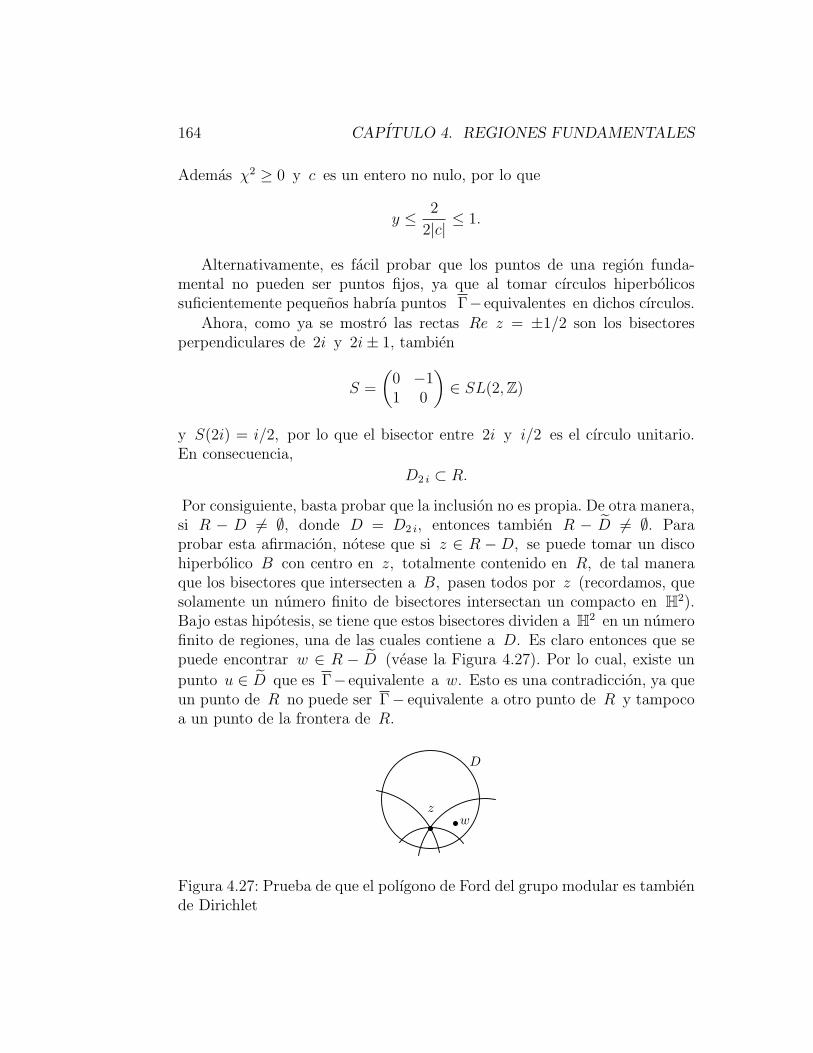
164 CAPITULO 4. REGIONES FUNDAMENTALES
Ademas χ2 ≥ 0 y c es un entero no nulo, por lo que
y ≤ 2
2|c|≤ 1.
Alternativamente, es facil probar que los puntos de una region funda-mental no pueden ser puntos fijos, ya que al tomar cırculos hiperbolicossuficientemente pequenos habrıa puntos Γ−equivalentes en dichos cırculos.
Ahora, como ya se mostro las rectas Re z = ±1/2 son los bisectoresperpendiculares de 2i y 2i± 1, tambien
S =
(0 −11 0
)∈ SL(2,Z)
y S(2i) = i/2, por lo que el bisector entre 2i y i/2 es el cırculo unitario.En consecuencia,
D2 i ⊂ R.
Por consiguiente, basta probar que la inclusion no es propia. De otra manera,si R − D 6= ∅, donde D = D2 i, entonces tambien R − D 6= ∅. Paraprobar esta afirmacion, notese que si z ∈ R − D, se puede tomar un discohiperbolico B con centro en z, totalmente contenido en R, de tal maneraque los bisectores que intersecten a B, pasen todos por z (recordamos, quesolamente un numero finito de bisectores intersectan un compacto en H2).Bajo estas hipotesis, se tiene que estos bisectores dividen a H2 en un numerofinito de regiones, una de las cuales contiene a D. Es claro entonces que sepuede encontrar w ∈ R − D (vease la Figura 4.27). Por lo cual, existe un
punto u ∈ D que es Γ− equivalente a w. Esto es una contradiccion, ya queun punto de R no puede ser Γ− equivalente a otro punto de R y tampocoa un punto de la frontera de R.
D
z
w
Figura 4.27: Prueba de que el polıgono de Ford del grupo modular es tambiende Dirichlet

4.3. POLIGONO DE FORD 165
Existe otro metodo de construccion de regiones fundamentales atribuidoa Poincare, este consiste en encontrar un polıgono que cumpla ciertas condi-ciones sobre los vertices y que los lados esten apareados bajo transformacionesdel grupo (cf. [2] pp. 242-250).
EJERCICIOS 4.3
1. Termine la prueba del Lema 4.3.1.
2. Demuestre que si los cırculos isometricos de una transformacion T y de suinversa se intersectan, entonces los puntos de interseccion son puntos fijos.
3. Sean I(T ) y I(T−1
)los cırculos isometricos de una transformacion T y
su inversa. Demuestre que: si T es elıptica, I(T ) y I(T−1
)se intersectan
en dos puntos; si T es parabolica, son tangentes; y si T es hiperbolica, sonajenos.
4. Demuestre que los cırculos isometricos de una transformacion loxodromicay su inversa son ajenos.
5. Demuestre que dado un subgrupo discreto Γ de PSL(2,R) existen re-giones fundamentales de Γ, R1, R2, tales que R1 es un subconjunto propiode R2.
6. Sea Γ el subconjunto del grupo modular determinado por las matricescuyas entradas inferiores izquierdas son multiplos de 2, demuestre que Γ esun subgrupo y encuentre una de sus regiones de Ford.
166 CAPITULO 4. REGIONES FUNDAMENTALES
Bibliografıa
[1] Asplund, E. and Bungart, L., A First Course on Integration, Holt,Rinehart and Winston, 1966.
[2] Beardon, A. F., The Geometry of Discrete Groups, Graduate Textsin Mathematics 91, Springer-Verlag, 1995.
[3] Benedetti, R. and Petronio, C., Lectures on Hyperbolic Geome-try, Springer-Verlag, 1992.
[4] Herstein, I. N., Topics in Algebra, Xerox College Publishing, 1964.
[5] Hoffman, M. and Marsden, J. E., Basic Complex Analysis, W.H.Freeman and Company, 1996.
[6] Jones, G. A. and Singermann, D., Complex Functions, CambridgeUniversity Press, 1987.
[7] Kulkarni, R., An arithmetic-geometric method in the study of thesubgroups of the modular group, American Journal of Mathematics,113 (1991), 1053-1133.
[8] Lang, S., Linear Algebra, Addison Wesley, 1972.
[9] Lascurain Orive, A., Some presentations for Γ0(N), ConformalGeometry and Dynamics, vol. 6 (2002), 33-60.
[10] Lehner, J., A Short Course in Automorphic Functions, Holt, Rine-hart and Winston, 1966.
[11] Letho, O., Univalent Functions and Teichmuller spaces, GraduateTexts in Mathematics 109, Springer-Verlag, 1987.
167
168 BIBLIOGRAFIA
[12] Maclachlan, C. and Reed, A. W, The Arithmetic of Hyperbo-lic 3-Manifolds, Graduate Texts in Mathematics 219, Springer Verlag,2003.
[13] Mc Mullen, C., Rational maps and Kleinian groups, Proceedings ofthe International Congress of Mathematicians, Kyoto, Japan 1990.
[14] Maskit, B., Kleinian Groups, Springer-Verlag, 1987.
[15] Mucino Raymundo, J., Geometrıa hiperbolica –una introduccionusando calculo y variable compleja–, Aportaciones Matematicas, Co-municaciones 21 (1998), 165-196.
[16] Mumford, D., Series, C. and Wright, D., Indra’s Pearls, Cam-bridge University Press, 2001.
[17] Ramırez Galarza, A. I. y Seade Kuri, J., Introduccion a lageometrıa avanzada, Facultad de Ciencias UNAM, 2002.
[18] Ramırez Galarza, A. I. y Sienra Loera G., Invitacion a lasgeometrıas no euclidianas, Facultad de Ciencias, UNAM, 2000.
[19] Ramırez Ogando, G. A., Superficies de Riemann como cocientesde acciones discontinuas en la esfera, Tesis de licenciatura, Facultadde Ciencias, UNAM, 2004.
[20] Ratcliffe, J. G., Foundations of Hyperbolic Manifolds, GraduateTexts in Mathematics 149, Springer-Verlag, 1995.
[21] Shimura, G., Introduction to the Arithmetic Theory of Automor-phic Functions, Tokio Iwanami Shoten and Princeton University Press,1971.
[22] Thurston, W. P., Three Dimensional Geometry and Topology, vol.1, edited by Silvio Levy, Princeton Mathematical Series, 35, PrincetonUniversity Press, 1997.
[23] Verjovsky Sola, A., Introduccion a la geometrıa y las variedadeshiperbolicas Oaxtepec, Morelos, ELAM, 1982.
[24] Warner, F. W., Foundations of Diferentiable Manifolds and LieGroups, Scott, Foresman and Company, 1971.
Indice Analıtico
area hiperbolica, 134
Apolonio, cırculos de, 24
bisector perpendicular, 136
“cırculos”, 16cırculos hiperbolicos, 53Cayley, funcion de, 34conforme, transformacion, 15conjunto fundamental, 131cordal, metrica, 6
∆, 34densidad, 43Dirichlet, polıgono de, 142discontinuo, 90“discos”, 32discreto, grupo, 101dominio fundamental, 133
eje, de una transformacion hiperboli-ca, 56
elıptica, transformacion, 23estable, vecindad, 140
factor de conformalidad, 43Ford, dominio de, 160fuchsiano, grupo, 110
geodesica, 51GL(2,C), 37
h-convexo, 137H2, 32haz
elıptico, 80hiperbolico, 80parabolico, 79
hiperbolica, transformacion, 23hiperciclos, 55horocıclico, grupo, 111horociclos, 55
infinito, punto al, 1isometrico, cırculo, 158
lımiteconjunto, 89punto, 89
loxodromica, transformacion, 23
metrica hiperbolica, 47M(∆), 36Mobius, transformaciones de, 1, 8modular, grupo, 95multiplicadores, 37
ordinarioconjunto, 89punto, 89
parabolica, transformacion, 21Picard, grupo de, 104plano complejo, extendido, 1
169
170 INDICE ANALITICO
Poincaredisco de, 60extension de, 83
principal de congruencias, grupo, 96proyeccion estereografica, 2PSL(2,C), 11PSL(2,R), 32
region fundamental, 133ρ, 49Riemann, esfera de, 2
SL(2,C), 9SL(2,R), 32Steiner, configuracion de, 25