UNIDAD 1 Magnitudes Vectoriales
15
Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina Resistencia y Ensayo de los Materiales Tecnicatura en Automotores ----------------------------------------------------------------------------------------------------------------------------------------------------------------- Unidad 1. REPRESENTACIÓN DE MAGNITUDES FÍSICAS. VECTORES. MAGNITUDES FÍSICAS En la Física no basta con describir cualitativamente los fenómenos sino que, en muchas ocasiones, se hace necesario su estudio de forma cuantitativa; ello implica que los fenómenos físicos deben poder medirse.- Así, se denomina magnitud a aquella cualidad de los cuerpos o de los fenómenos que se puede medir. Cada magnitud estará correctamente expresada por un número y una unidad. Ejemplos son: la fuerza, la masa, la velocidad, el campo eléctrico, etc., (existen otras cualidades como la belleza, el sabor y el olor, que no constituyen magnitudes físicas ya que no se pueden medir).- Se dice cantidad de una magnitud al estado de esa magnitud en un objeto o fenómeno determinado. Por ejemplo, una distancia recorrida, la altura de una casa, el ancho de una mesa, etc., son cantidades de una misma magnitud: la longitud.- Vemos así que: • la magnitud representa un conjunto de cantidades. • la cantidad es lo que resulta de una medición. Las magnitudes físicas se pueden clasificar, de una forma general, en magnitudes escalares y magnitudes vectoriales.- Magnitudes escalares Las magnitudes físicas más sencillas pueden definirse completamente mediante un valor (compuesto por un número real) y la unidad que se haya utilizado para su medida. Por ejemplo, si establecemos que un cuerpo tiene una masa de 5,5 kg, estamos indicando que la masa del cuerpo es cinco veces y media la masa del kilogramo patrón. Este tipo de magnitudes se denomina escalares.- Ejemplos de este tipo de magnitud son: la longitud de un hilo, la masa de un cuerpo o el tiempo transcurrido entre dos sucesos. Se las puede representar mediante segmentos tomados sobre una recta a partir de un origen, y de longitud igual al número real que indica su medida. Otros ejemplos de magnitudes escalares son la temperatura, el volumen, la densidad, la presión, la energía, el trabajo mecánico, la potencia, etc.-
-
Upload
nestor-damian-fischetto -
Category
Documents
-
view
46 -
download
1
Transcript of UNIDAD 1 Magnitudes Vectoriales

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
Unidad 1.
REPRESENTACIÓN DE MAGNITUDES FÍSICAS. VECTORES. MAGNITUDES FÍSICAS En la Física no basta con describir cualitativamente los fenómenos sino que, en muchas ocasiones, se hace necesario su estudio de forma cuantitativa; ello implica que los fenómenos físicos deben poder medirse.- Así, se denomina magnitud a aquella cualidad de los cuerpos o de los fenómenos que se puede medir. Cada magnitud estará correctamente expresada por un número y una unidad. Ejemplos son: la fuerza, la masa, la velocidad, el campo eléctrico, etc., (existen otras cualidades como la belleza, el sabor y el olor, que no constituyen magnitudes físicas ya que no se pueden medir).- Se dice cantidad de una magnitud al estado de esa magnitud en un objeto o fenómeno determinado. Por ejemplo, una distancia recorrida, la altura de una casa, el ancho de una mesa, etc., son cantidades de una misma magnitud: la longitud.- Vemos así que:
• la magnitud representa un conjunto de cantidades. • la cantidad es lo que resulta de una medición.
Las magnitudes físicas se pueden clasificar, de una forma general, en magnitudes escalares y magnitudes vectoriales.- Magnitudes escalares Las magnitudes físicas más sencillas pueden definirse completamente mediante un valor (compuesto por un número real) y la unidad que se haya utilizado para su medida. Por ejemplo, si establecemos que un cuerpo tiene una masa de 5,5 kg, estamos indicando que la masa del cuerpo es cinco veces y media la masa del kilogramo patrón. Este tipo de magnitudes se denomina escalares.- Ejemplos de este tipo de magnitud son: la longitud de un hilo, la masa de un cuerpo o el tiempo transcurrido entre dos sucesos. Se las puede representar mediante segmentos tomados sobre una recta a partir de un origen, y de longitud igual al número real que indica su medida. Otros ejemplos de magnitudes escalares son la temperatura, el volumen, la densidad, la presión, la energía, el trabajo mecánico, la potencia, etc.-

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
Vamos a dar dos ejemplos concretos de mediciones de magnitudes escalares:
Medición de una longitud
En este caso se mide el ancho de la cabeza de un tornillo. (Se podría medir el largo del tornillo, y también estaríamos midiendo una longitud).
Representación de la medición
En forma escrita:
Ø t = 6,00 mm
(Esto se interpreta como que el diámetro de la cabeza del tornillo Øt, mide 6,00 milímetros). En forma gráfica:
Medición de un voltaje
Representación de la medición
En forma escrita:
V B = 12,35 Volts (Es decir, la tensión de la batería VB es de 12, 35 Volts). En forma gráfica:

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
Magnitudes vectoriales Frente a aquellas magnitudes físicas escalares, aparecen otras, tales como el desplazamiento, la velocidad, la aceleración, la fuerza, etc., que no quedan completamente definidas dando un dato numérico, sino que llevan asociadas una orientación en el espacio. Estas últimas magnitudes son llamadas vectoriales.- Por ejemplo, uno puede desplazarse 10 m verticalmente y hacia arriba, o 10 m horizontalmente y hacia la derecha; siendo ambos desplazamientos notoriamente diferentes, y no se pueden definir sólo indicando que se ha desplazado 10 m.- Las magnitudes vectoriales se representan por un ente matemático que recibe el nombre de vector. Tanto en el plano (dos dimensiones) como en el espacio (tridimensional), un vector se representa gráficamente por una flecha entre dos puntos. La recta sobre la cual se dibuja indica la dirección del vector y la punta indicará el sentido. Su largo deberá ser proporcional al módulo de la cantidad representada.- Una de las mediciones de magnitudes vectoriales más comunes es la de fuerza:
Medición de una fuerza
Representación de la medición
En forma escrita:
F1 = 5 N ∠20º F2 = 5 N ∠45º
(Las dos fuerzas tienen el mismo módulo, pero distinto sentido). En forma gráfica:

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
Otros ejemplos de magnitudes vectoriales son: • La velocidad con que se desplaza un móvil, ya que no queda definida tan sólo
por su módulo (lo que marca el velocímetro, en el caso de un automóvil), sino que se requiere indicar la dirección hacia la que se dirige.-
• El desplazamiento de un objeto.- Las magnitudes vectoriales se representan en los textos impresos por letras en negrita, para diferenciarlas de las magnitudes escalares que se representan en cursiva. Ejemplo de un texto:
En los magnitusobre lacarácte
“…para estudiar los efectos centrífugos producidos
por un movimiento de rotación sobre un cuerpo,
definiremos como m a la masa del cuerpo, T a la
tensión de la cuerda, Fc a la fuerza centrífuga y v
a la velocidad tangencial del cuerpo en rotación.”
textos manuscritos (y como lo haremos nosotros en nuestras carpetas), las des vectoriales se representan matemáticamente colocando una flecha letra que designa su magnitud, para que no quede ninguna duda de su
r vectorial. Ejemplo:
“…para estudiar los efectos centrífugos producidos
por un movimiento de rotación sobre un cuerpo,
definiremos como m a la masa del cuerpo, →
T a la
tensión de la cuerda, a la fuerza centrífuga y →
cF→
v a la velocidad tangencial del cuerpo en rotación.”

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
REPRESENTACIÓN DE VECTORES Sistemas de coordenadas rectangulares En muchas ocasiones, cuando se quiere estudiar el comportamiento de un sistema físico, es necesario asociar sus componentes a un sistema de coordenadas. Uno de los sistemas coordenados más sencillos de comprender es el denominado “Sistema de Coordenadas Rectangulares”, el cual está caracterizado por una serie de ejes denominados “cartesianos”.- Si lo que se pretende es considerar un sistema en el espacio, entonces se elige una representación “tridimensional”, en donde las referencias serán tres ejes coordenados, dibujados a 90º unos de otros. Comúnmente a estos ejes se los nota con las letras x, y y z.-
Si se toma una representación más sencilla, donde solo se consideren dos dimensiones (representación “bidimensional”, o “en el plano”), entonces las referencias serán solo dos ejes, perpendiculares entre sí, que se los nota con las letras x e y. Estos ejes dividen al plano en cuatro secciones o cuadrantes: • En el cuadrante I, x e y son positivas
(+). • En el cuadrante II, x es negativa (-) e y
es positiva (+). • En el cuadrante III, x e y son negativas
(-). • En el cuadrante IV, x es positiva (+) e y
es negativa (-).- Al considerar un vector, necesariamente se lo debe hacer tomando como referencia un sistema coordenado, ya que este le dará sentido al valor de su módulo, a su dirección y orientación. Esto quiere decir que si se dibuja un vector dentro de un sistema coordenado de referencia, entonces, por comparación con sus ejes, se podrán conocer todos los valores que caracterizan a dicho vector.- Estudiemos primero los vectores que actúan en el plano, y dentro de ellos, por una cuestión de sencillez, aquellos vectores cuyo punto de aplicación se encuentra en el origen de coordenadas:

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
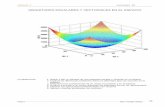
Componentes cartesianas de un vector en el plano Al dibujar un vector cuyo punto de aplicación se encuentre situado en el origen de coordenadas (es decir, donde los dos ejes toman el valor cero), automáticamente queda determinada (y sin lugar a doble interpretación) la posición de la punta del vector. Por ejemplo en la figura siguiente, donde vemos un vector ubicado en el primer cuadrante, la punta de la flecha está ubicada en una única posición que puede ser determinada por un par de números reales. ¿Cuáles son estos números? Veamos:
• El primer número, que se llamará “componente x” del vector, se obtiene de la intersección entre el eje x, y una recta perpendicular a este eje que pase por la punta del vector.-
• Para el segundo número en cuestión, “componente y” del vector, hay que
trazar una recta perpendicular al eje y, que pase por la punta del vector, y considerar su intersección con ese eje.-
Entonces, en nuestro ejemplo, los números 5 y 3 serán, respectivamente, las componentes x e y del vector; y de esta forma, el par (5 ; 3) será el que utilizaremos, en definit Ejemplos:
iva, para caracterizarlo.-

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
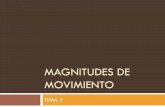
Módulo de un vector
ión de la punta del vector, y de esta forma definir su irección y sentido, este par de números (componente x ; componente y) también
on el centro de oordenadas (0;0), entonces el módulo del vector estará dado por la siguiente
Además de dar la ubicacdnos da información sobre el largo del mismo, es decir su módulo.- Si los vectores que se consideran son fijos, y su origen coincide ccfórmula:
22 de Módulo yx VVVV +=≡rr
Donde Vx y Vy son las componentes x e y del vector V.-
ara los ejemplos anteriores, el cálculo de los respectivos módulos sería: P
40,641162545 221 ==+=+=V
( )
( )
( ) 47,42041624
41616040
83,53492535
224
223
222
==+=+−=
==+=−+=
==+=−+=
V
V
V
Sistemas de coordenadas polares
das rectangulares, un vector queda ompletamente identificado mediante la utilización de un par de números reales, a
mbién dijimos que estos staban caracterizados por su módulo, su dirección y su sentido. Por lo tanto es
Como vimos, a partir del sistema de coordenaclos que se llama componentes rectangulares del vector.- Pero cuando hablamos por primera vez de vectores, taeposible utilizar estas características principales para identificar a los vectores. Es fácil ver que el módulo, por sí solo, no alcanza para este propósito, ya que pueden existir distintos vectores con el mismo valor en módulo, pero con distintas direcciones y orientaciones en el espacio (o en el plano).-

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
Existe un sistema de coordenadas, denominado “sistema de coordenadas olares”, el cual también utiliza un par de valores numéricos para identificar a los p
vectores en el plano bidimensional (tres para el espacio tridimensional). Uno de ellos es el módulo del vector, y el otro es el ángulo que forma el vector con respecto al eje x, midiéndolo siempre a partir de este último y en el sentido inverso al de rotación de las agujas del reloj (sentido levógiro).-
En conclusión, uno puede adoptar distintos sistemas coordenados para definir un ector. Tanto la representación cartesiana rectangular, como la representación
Intercambio de coordenadas
tos que se presentan en los ejercicios o roblemas a resolver, y el planteo de los mismos, nos obliga a efectuar un cambio
, el hecho de realizar un cambio de oordenadas no significa, de ninguna manera, cambiar de vector. Tanto en
vpolar, son válidas y sirven para representar numéricamente a los vectores. Veremos más adelante que para resolver distintas operaciones con vectores (sumas, restas, multiplicación por escalar, etc.) algunos sistemas coordenados se presentan más favorables que los otros; de ahí que se deben conocer y dominar a ambos.- En determinadas circunstancias, los dapde coordenadas para poder seguir adelante con las operaciones matemáticas. Así uno debe pasar de los datos y valores obtenidos desde las coordenadas rectangulares a las polares, o viceversa.- Si se habla de un determinado vectorcrectangulares como en polares, el vector original sigue siendo el mismo y el cambio de coordenadas no lo modifica; simplemente se lo expresa de distinta manera.-

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
De coordenadas rectangulares a polares:
itágoras:
• Para obtener el módulo se utiliza la fórmula de P
22 VVVV +=≡de Módulo yx
rr
Para obtener el valor del ángulo, se deben relacionar las componentes x e y con la fórmula trigonométrica de la tangente:
De coordenadas polares a rectangulares:
pasos utilizando las fórmulas igonométricas del seno y el coseno, relacionando el módulo del vector y el
⇒= xV
tgα yV⎟⎟⎠
⎞⎛ yV⎜⎜⎝
=xV
tginv .α • Esta operación se realiza también en dostrángulo de orientación con las componentes x e y del vector. Para estos casos, cabe aclarar que el módulo del vector representaría a la hipotenusa del triángulo trigonométrico:
⇒=
Vyα sinV
α sin.VVy =
⇒= cosVVxα α cos.VVx =

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
Vectores fijos y libres
nt es que se pueden realizar con los vectores, vamos aclarar los conceptos de “vectores fijos” y “vectores libres” en el plano (estos
cia a lo que e denominan “vectores fijos”, es decir aquellos de los cuales se conocen sus
habitual trabajar con otros tipos de vectores, por ejemplo:
ido, no se
A esto e los denomina comunmente “vectores libres”, muy utilizados, or ejemplo, para representar fuerzas impuestas sobre cuerpos en movimiento.-
s importante saber que para representar uméricamente un vector libre, se utiliza las
representación numérica, los ectores V1 y V2 pueden ser representados
A es de pasar a las operacionaconceptos se pueden trasladar, o generalizar para tres dimensiones).- Hasta ahora, todo lo que se explicó sobre vectores se hizo en referenspuntos de aplicación, y en particular los que su origen coinciden con el centro de coordenadas.- Pero también es
• Vectores cuyo origen no coincide con el centro de coordenadas;
• Vectores que si bien conservan su módulo, dirección y sentencuentran fijos en el plano (espacio) y se desplazan siempre en forma paralela.-
s últimos sp Encomponentes de un vector representante del mismo, a saber: aquel vector fijo con origen en el centro de coordenadas, que posea las mismas características (módulo, dirección y sentido) que el vector libre que se quiere representar.- En la siguiente figura se ve que, a los efectos de su vcon las componentes del vector V3:
( )2 ; 5321 === VVV
Para obtener gráficamente el vector representante (fijo con origen en el centro de coordenadas), basta con trasladar en forma paralela el vector original hasta que su origen coincida con el punto (0 ; 0) del plano.-

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
Operaciones con vectores
Suma de vectores. Métodos gráficos.
xisten dos métodos gráficos tradicionales para sumar vectores. El primero de mo”, y sirve para sumar dos vectores
nto en el plano como en el espacio. Como vemos en la figura, el método consiste
• Eellos se denomina “método del paralelogrataen trazar una recta auxiliar, paralela a uno de los vectores, que pase por la punta del otro vector. Esta operación se realiza por cada vector en consideración y, donde se cruzan las rectas auxiliares, quedará determinado el extremo del vector suma (también llamado “vector resultante”).-
El otro método, usado cuando hay que sumar más de dos vectores, denominado método del polígono”, consiste en ir trasladando en forma paralela cada vector, e forma tal que la punta de cada uno coincida con el origen del siguiente. Resulta
“dasí una serie de vectores conectados por sus extremos, la que definirá el vector resultante entre el origen del primer vector y la punta del último.-
Cabe aclarar que la operación de suma de vectores es conmutativa, es decir se uede cambiar el orden de los vectores que se están sumando y siempre el sultado final será el mismo vector resultante. Esto se puede comprobar tanto
pregráfica como numéricamente.-

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
Suma de vectores. Método analítico o numérico.
ara sumar vectores en forma numérica es indispensable que los mismos estén ir por un par de números
ales que identifiquen sus componentes cartesianas. De esta forma, la operación
• Prepresentados en coordenadas rectangulares, es decrede suma queda definida de la siguiente manera:
( ) ( ) ( )( ) ... , ... rcbacba yyyxxx
yx
=++++++=
Como se puede ver, la operación suma se resuelve fácilmente sumando omponente a componente para obtener el vector resultante, también expresado n forma cartesiana.-
... , , ,... ccbbaacba yxyx =+++=+++
ce Ejemplo:
( ) ( ) ( ) ( )( )
VVVV=+−−−++=
=−+−+−+=+++2434 ; 4055
2 ; 44 ; 03 ; 54 ; 54321
( ) R=−= 1 ; 6

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------
• Multiplicación de un vector por un escalar. Contracción. Dilatación. Inversión.
Otra de las operaciones muy comunes cuando se trata con vectores, es la ultiplicación de estos por números escalares. Recordemos que un número
ados un vector V , y un escalar a cualquiera, esta operación de multiplicación
mescalar es simplemente un número real que, junto con una unidad de medida, se puede utilizar para representar mediciones sencillas como temperatura, longitud, tiempo, presión, intensidad de corriente eléctrica, luminosidad, etc.-
→
D queda definida de la siguiente manera:
( ) WVaVa yxyx == ). ; .(
e debe notar que a partir de esta operación, el resultado que se obtiene es otro
o Posee igual dirección que el vector .
r si a es positivo.
(inversión).
VVaVa = ; ..
S
vector W que cumple con las siguientes características:
→
→
V
o Posee el mismo sentido que el vecto →
V ,
o Posee sentido contrario que el vector , si a es negativo →
V
o Su módulo tendrá un valor dado por VaW .= .
demás, teniendo en cuenta el valor absoluto del escalar:
o
A
1 sii == aVW .
o 1 sii >> aVW (dilatación del vector).
o 10 sii <<< aVW (contracción del vector).
omo ejemplos de estas operaciones, y para ver sus características, consideremos s siguientes:
Clo

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------

Escuela de Educación Secundaria Técnica Nº 2 “Ing. César Cipolletti”, Bahía Blanca, Argentina
Resistencia y Ensayo de los Materiales Tecnicatura en Automotores -----------------------------------------------------------------------------------------------------------------------------------------------------------------