Universidad Autónoma de San Luis Potosí Doctorado en...
9
Universidad Autónoma de San Luis Potosí Doctorado en Ingeniería Eléctrica Octavo informe técnico de avance de tesis doctoral Análisis, modelado y control de un convertidor modular multinivel como elemento de enlace dentro de una red en corriente directa de alto voltaje Alumno: Jorge Isaac González Torres Directores de tesis: Dr. Homero Miranda Vidales. —————————— Dr. César Fernando Francisco Méndez Barrios. —————————— Institución donde se realiza el trabajo de tesis: Centro de Investigación y Estudios de Posgrado. Facultad de Ingeniería. UASLP. Periodo: Febrero 2017 – Agosto 2017. 1. Introducción Dentro de las diferentes topologías para los convertidores de electrónica de potencia se encuentra el convertidor modular multinivel (MMC), el cual permite trabajar de un modo simple y directo con sistemas de transmisión de energía en corriente continua de alta tensión (HVDC). Lo anterior se debe a diferentes características, tales como: la modularidad, escalabilidad, reconfigurabilidad, disponibilidad, además de una mejor eficiencia global en comparación a otros convertidores fuente de voltaje (VSC). La introducción e interacción de nuevas fuentes de generación a través de VSC en las redes eléctricas, está transformando las redes convencionales en redes distribuidas, donde el intercambio energético se da entre diferentes puntos de conexión. La figura 1 muestra un esquema multipuerto basado en el MMC, donde el intercambio de energía se da principalmente entre las redes en ca y una fuente complementaria tiene la capacidad de introducir energía en el enlace. VSC – HVDC Línea de transmisión P(W) Q(VAR) Generación Complementaria MMC MMC G P(W) Q(VAR) P(W) Red ca Red ca Figura 1. Red MMC-HVDC multipuerto. 1.1. Objetivo general de la investigación doctoral Realizar un estudio del comportamiento, interacción y gestión energética del convertidor modular multinivel dentro de un enlace en corriente directa con diferentes puntos de conexión.
-
Upload
nguyenkhuong -
Category
Documents
-
view
220 -
download
0
Transcript of Universidad Autónoma de San Luis Potosí Doctorado en...

Universidad Autónoma de San Luis PotosíDoctorado en Ingeniería Eléctrica
Octavo informe técnico de avance de tesis doctoral
Análisis, modelado y control de un convertidor modular multinivel como elemento de enlacedentro de una red en corriente directa de alto voltaje
Alumno:Jorge Isaac González Torres
Directores de tesis:Dr. Homero Miranda Vidales. ——————————
Dr. César Fernando Francisco Méndez Barrios. ——————————
Institución donde se realiza el trabajo de tesis:Centro de Investigación y Estudios de Posgrado. Facultad de Ingeniería. UASLP.
Periodo:Febrero 2017 – Agosto 2017.
1. Introducción
Dentro de las diferentes topologías para los convertidores de electrónica de potencia se encuentra el convertidor modularmultinivel (MMC), el cual permite trabajar de un modo simple y directo con sistemas de transmisión de energía en corrientecontinua de alta tensión (HVDC). Lo anterior se debe a diferentes características, tales como: la modularidad, escalabilidad,reconfigurabilidad, disponibilidad, además de una mejor eficiencia global en comparación a otros convertidores fuente devoltaje (VSC).
La introducción e interacción de nuevas fuentes de generación a través de VSC en las redes eléctricas, está transformandolas redes convencionales en redes distribuidas, donde el intercambio energético se da entre diferentes puntos de conexión. Lafigura 1 muestra un esquema multipuerto basado en el MMC, donde el intercambio de energía se da principalmente entre lasredes en ca y una fuente complementaria tiene la capacidad de introducir energía en el enlace.
VSC – HVDCLínea de transmisión
P(W)Q(VAR)Generación
ComplementariaMMC MMC
GP(W)
Q(VAR)
P(W)
Red ca Red ca
Figura 1. Red MMC-HVDC multipuerto.
1.1. Objetivo general de la investigación doctoral
Realizar un estudio del comportamiento, interacción y gestión energética del convertidor modular multinivel dentro de unenlace en corriente directa con diferentes puntos de conexión.

Octavo avance de tesis.
1.1.1. Objetivos particulares
Para este trabajo se consideran los siguientes objetivos particulares:
� Caracterización y modelado de la topología modular multinivel basada en el convertidor de medio puente.
· Selección y validación de los elementos pasivos.
· Selección y modelado de las variables de estado.
� Análisis del esquema de modulación para el convertidor modular multinivel.
· Modulación de nivel más cercano.
· Esquemas de bajo y alto número de niveles.
· Caracterización de la frecuencia de conmutación y tiempos de conducción.
· Efecto del tiempo muerto dentro del MMC.
� Aplicación de las técnicas de control predictivo.
· Control predictivo de matriz dinámica.
· Control predictivo generalizado.
� Análisis de la interacción entre los diferentes puntos de conexión en la red.
2. Trabajo desarrollado
Las actividades realizadas a lo largo de este semestre se enlistan a continuación:
1. Implementación en lazo cerrado de un MMC de dieciocho niveles dentro de la plataforma en tiempo real.
2. Desarrollo y estructuración del controlador predictivo generalizado para la regulación de tensión del enlace HVDC.
3. Estructuración de la simulación en tiempo real del sistema HVDC multipuerto, basado en el MMC.
4. Redacción de dos artículos para la revista International Journal of Electrical Power and Energy Systems.
� “Long-Length Horizons Dynamic Matrix Predictive Control for a MMC Inverter”, en revisión.
� “State Feedback Control with a Gain Scheduling Scheme for NPC VSC in dual port HVDC Systems”, en sometido.
5. Corrección del artículo: “Dynamic Matrix Predictive Control on DC-AC Modular Multilevel Converter: Design, Controland Real-Time Simulation”, ECCE 2017, Aceptado para su presentación oral.
3. Estructura multinúcleo en el DRTS para el MMC
La plataforma digital de simulación en tiempo real (DRTS) es una herramienta que permite probar convertidores de electrónicade potencia, así como algoritmos de control en un entorno realista, puesto que es capaz de resolver el modelo propuesto enun tiempo igual o menor al paso de integración de la simulación (Ts). Con el objetivo de llevar a cabo esta tarea el DRTS escapaz de realizar procesamiento en paralelo de las diferentes tareas asignadas, para con ello conseguir simular sistemas máscomplejos sin la necesidad de aumentar el Ts [1, 2].
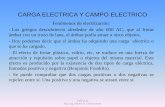
La figura 2 ilustra el modelo eléctrico de un MMC, donde la carga computacional está compartida entre el par de CPUdisponibles dentro del DRTS y cada CPU está compuesto por 3 núcleos. La comunicación entre núcleos de una misma unidadde cómputo se realiza mediante memoria compartida, sin embargo, los datos que fluyen entre los CPU utilizan fibra óptica.Las tareas de simulación dentro del modelo, están asignadas de la siguiente manera:
Agosto de 2017. 2
Octavo avance de tesis.
nBa
S ...1
ZOH200Hz
mBabcs B
abc
ModulaciónPOD
Selección NLC
Cálculo|mx| ∟ θmx
DMC2 Entradas2 Salidas
P, QMedidas
aUv bUv cUv
aLv
bLv
cLv
av
M
bv
cv
bUi cUi
aLi
bLi
cLi
M
2cdv
2cdv
cdZ
cdZ
0Z
0Z
0Z 0Z
0Z 0Z
pccZ
pccZ
pccZ
aUi
ai
bi
ci
PU
QU vabc
iabc
nBb
S ...1
nBc
S ...1
cbaBv
nCv...1
0
Núcleo-1
Núcleo-2
Núcleo-3Núcleo-4Núcleo-5
cbaBi
aBi
v 1Ba
vNsm
Ba
a Bv
Figura 2. Esquema de simulación multinúcleo del MMC en lazo cerrado
� El Núcleo�1, simula la interacción entre la tensión de los bloques del MMC y ambas redes eléctricas, compartiendo lainformación referente al par de corrientes en las ramas, así como la tensión y corriente de cada una de las fases en ca.
� Los cálculos referentes a la técnica de control, así como los esquemas de modulación y balance de condensadores sonasignados al Núcleo�2, donde las señales para el encendido de los submódulos (SM) están en función de la potencia atransmitir y del signo de la corriente en los bloques.
� El resto de núcleos (del 3 al 5), llevan a cabo el cálculo de la tensión en los condensadores de ambos bloques de cadarama, basado en la corriente del bloque y en las señales de conmutación. Cada núcleo se encarga de generar las señalesde conmutación complementarias así como de agregar el tiempo muerto requerido.
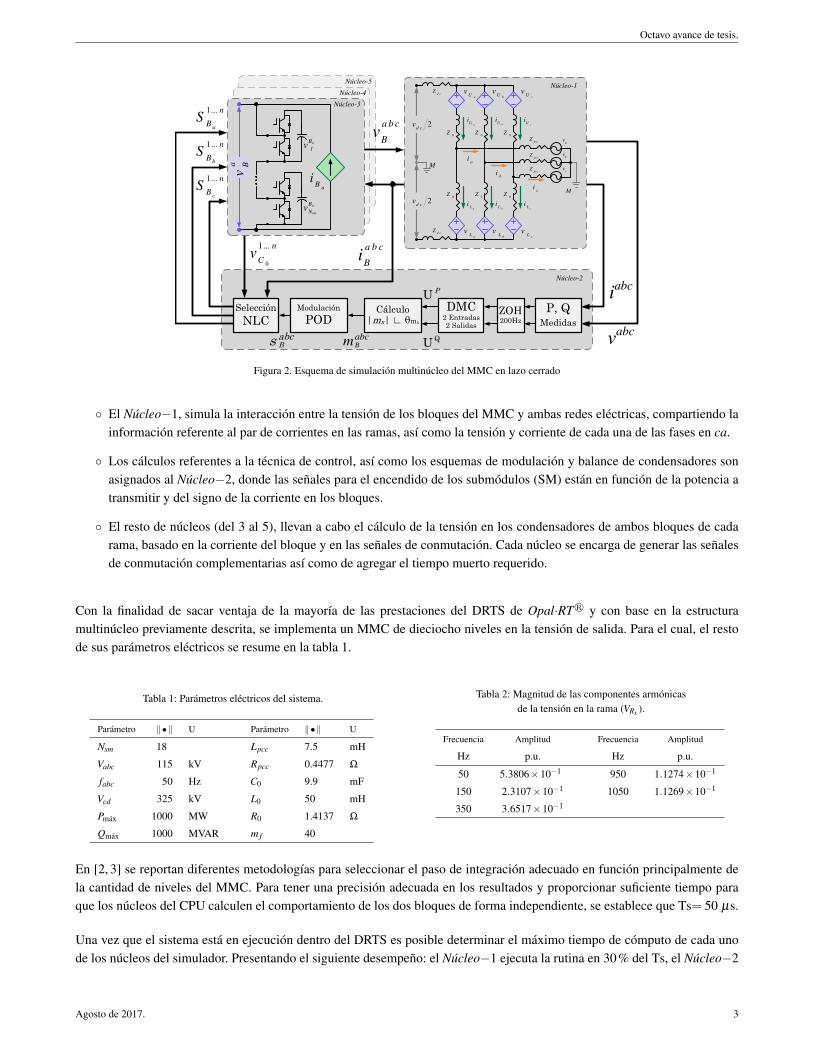
Con la finalidad de sacar ventaja de la mayoría de las prestaciones del DRTS de Opal·RTr y con base en la estructuramultinúcleo previamente descrita, se implementa un MMC de dieciocho niveles en la tensión de salida. Para el cual, el restode sus parámetros eléctricos se resume en la tabla 1.
Tabla 1: Parámetros eléctricos del sistema.
Parámetro k•k U Parámetro k•k U
Nsm 18 Lpcc 7.5 mH
Vabc 115 kV Rpcc 0.4477 Wfabc 50 Hz C0 9.9 mF
Vcd 325 kV L0 50 mH
Pmáx 1000 MW R0 1.4137 WQmáx 1000 MVAR m f 40
Tabla 2: Magnitud de las componentes armónicasde la tensión en la rama (VRx ).
Frecuencia Amplitud Frecuencia Amplitud
Hz p.u. Hz p.u.
50 5.3806⇥10�1 950 1.1274⇥10�1
150 2.3107⇥10�1 1050 1.1269⇥10�1
350 3.6517⇥10�1
En [2, 3] se reportan diferentes metodologías para seleccionar el paso de integración adecuado en función principalmente dela cantidad de niveles del MMC. Para tener una precisión adecuada en los resultados y proporcionar suficiente tiempo paraque los núcleos del CPU calculen el comportamiento de los dos bloques de forma independiente, se establece que Ts= 50 µs.
Una vez que el sistema está en ejecución dentro del DRTS es posible determinar el máximo tiempo de cómputo de cada unode los núcleos del simulador. Presentando el siguiente desempeño: el Núcleo�1 ejecuta la rutina en 30% del Ts, el Núcleo�2
Agosto de 2017. 3

Octavo avance de tesis.
necesita tan sólo el 14% del Ts, finalmente el resto de los núcleos que calculan el comportamiento de los bloques lo hacen en96% del Ts.
En [4, 5] se valida la fidelidad del comportamiento de los modelos para los elementos eléctricos utilizados por la plataformaOpal·RTr, con base en estos se toman como válidos los resultados mostrados a continuación.
3.1. Resultados del DRTS
En la figura 3(a) se muestra el comportamiento tanto de la potencia activa como reactiva, donde es posible apreciar que ambasreferencias son alcanzadas en 180 ms, mientras que el error en estado estable es menor al 3%. El sobretiro en la potenciareactiva tan solo alcanza el 17%, comprobando que el controlador permite reducir el efecto de fase no-mínima que tienen losVSC. Las señales de control para alcanzar las referencias deseadas están trazadas en en la figura 3(b), donde se observa queel controlador es efectivamente discreto y tiene una frecuencia de muestreo de 200 Hz.
P*P1
0.5V/div1s/div
Q*
Q1
(a) Comportamiento macro de las potencias eléctricas.
0.5V/div50ms/div0.1V/div50ms/div
U11
P1
U12
Q1
5 ms
(b) Señales de control en el convertidor.
Figura 3. Potencias eléctricas del MMC.
El comportamiento de las corrientes trifásicas se exhibe en la figura 4(a), las cuales no muestran sobre corrientes durante lainversión de potencia, además de que en todo momento las magnitudes están balanceadas y centradas en cero. También, seaprecia dentro del recuadro anexo que la corriente cambia de dirección e inclusive antes de que llegue a 1pu ya se encuentraen fase con la tensión de la red en ca. En la figura 4(b) es posible apreciar que la tensión de los condensadores se mantienealrededor de 1pu con un rizo del 5%; además durante la inversión de potencia, el rizo disminuye puesto que la cantidad decorriente que circula por el convertidor también lo hace.
La tensión en cada ramas del convertidor (VRx ) se ilustra en la figura 5(a), donde se ve que están compuesta por dieciochoniveles y un valor RMS de 1.14 p.u. a 50 Hz. El espectro armónico presentado en la figura 5(b) muestra las componentesprincipales de la señal de tensión y su magnitud es listada por la tabla 2, con las cuales se calcula que el THDv es de 5.7%.Sin embargo, es importante resaltar que al transmitir una potencia activa de 1 pu, el THDi de las corrientes en el PCC es de0.43% y la tensión tiene un THDv = 1.5441%.
4. Esquema de control predictivo generalizado para la regulación de tensión del enlace
En [6] se analiza un convertidor de seis pulsos, para el cual se establece la ecuación diferencial que relaciona la potencia quese disipa en el enlace de cd en función del cuadrado de la tensión del condensador, de la siguiente manera.
pcd (t) =Ceq
2ddt
v2cd (t) , (1)
donde pcd es la potencia del enlace, vcd es la tensión en el enlace y Ceq := Nsm C0.
Agosto de 2017. 4

Octavo avance de tesis.
0.5V/div50ms/div
ia ib ic
180 ms vaia
(a) Señales de tensión y corriente en el PCC.
0.2V/div200ms/divInversión
de potencia
(b) Tensión de los condensadores del bloque superior de la rama a.
Figura 4. Señales de tensión y corriente en el convertidor.
0.5V/div10ms/div
vRa vRb vRc
(a) Tensión escalonada trifásica a la salida del convertidor. (b) Espectro armónico de vRa .
Figura 5. Tensión eléctrica a la salida del convertidor.
Al hacer las consideraciones pertinentes de la energía que almacenan los condensadores en un MMC y substituyendo los va-lores de la tabla 2 dentro de (1); se obtiene la función de transferencia que será discretizada tomando en cuenta una frecuenciade muestreo de 200 Hz; con lo que se obtiene el modelo carima de la planta, como:
B�z�1�
A(z�1):= T F
�z�1�= 5.6116⇥10�2 z�1
1� z�1 , (2)
una vez que los polinomios mónicos son definidos, se establece que na = 1, nb = 0. Adicionalmente, se fijan los horizontes decontrol y predicción a Hm = 4, Hp = 8, respectivamente.
De la planta mostrada por (2) y siguiendo la metodología propuesta en [7], se calculan los valores de la matriz G que dependede los estados futuros, así como G0 que entrega información de los estados pasados.
Agosto de 2017. 5

Octavo avance de tesis.
G =
2
6666666666666664
0 0 0 0 0 0 0 0
0.0561 0 0 0 0 0 0 0
0.1122 0.0561 0 0 0 0 0 0
0.1684 0.1122 0.0561 0 0 0 0 0
0.2245 0.1684 0.1122 0.0561 0 0 0 0
0.2806 0.2245 0.1684 0.1122 0.0561 0 0 0
0.3367 0.2806 0.2245 0.1684 0.1122 0.0561 0 0
0.3928 0.3367 0.2806 0.2245 0.1684 0.1122 0.0561 0
3
7777777777777775
. (3)
G0 =h
0.0561 0.1122 0.1684 0.2245 0.2806 0.3367 0.3928 0.4489iT
. (4)
Definiendo DU := [Du(k) ... Du(k+Hm�1)], el incremento en la señal de control (DU) que minimizan la función de costopropuesta, queda dada por:
DU = K(w� f ) =⇣
GT eRG+ eQ⌘�1
GT eR (w� f ) , (5)
donde eR y eQ son las matrices de peso, f es el vector de salidas basado en información pasada y w es el vector de referenciasfuturas. La operación w� f se define de forma vectorial como:
w� f =⇥F G0 I
⇤ ⇥y0 . . .yna , Du1 . . .Dunb , w1 . . .wHp
⇤T. (6)
Las matrices de peso eR 2 RH p⇥H p y eQ 2 RHp⇥Hp están definidas como:
eR := diag⇥R1, R2, ..., RHp
⇤, (7)
eQ := diag⇥Q1, Q2, ..., QHp
⇤, (8)
con los valores de sus elementos dados por:R j = 1.19(0.99)2 j , (9)
Q j = 2.5(0.4)1.2 j , (10)
En conclusión el controlador de tipo predictivo generalizado, debe de realizar una multiplicación entre dos vectores de dimen-siones na +nb +Hp, para encontrar la señal de control actual que se debe de aplicar a la planta. Dicha operación se detalla acontinuación,
u(t) = u(t �1)+ k⇥y0 . . .yna , Du1 . . .Dunb , w1 . . .wHp
⇤T, (11)
donde el vector k es calculado fuera de línea y corresponde al primer renglón de la matriz K; en (12) se presentan los valoresde este vector, para la planta analizada.
k =h
�1.31 1.07 �6.01⇥10�2 0 2.56⇥10�2 4.86⇥10�2 6.51⇥10�2 6.98⇥10�2 5.78⇥10�2 3.12⇥10�2 1.52⇥10�3i. (12)
4.1. Comportamiento del GPC
A continuación se muestra el desempeño del esquema de control predictivo generalizado (GPC) mostrado en la figura 6; elcual tiene como tarea principal generar la referencia de potencia para que la tensión en el enlace de cd permanezca constante.Adicionalmente, se añade una perturbación a la salida del controlador, la cual emula la cantidad de potencia que el convertidordebe subministrar.
En la figura 7(a) se observa el comportamiento de la tensión del enlace de cd del convertidor. Donde a pesar de que laperturbación exige una diferente cantidad de potencia a la planta, el controlador logra estabilizar la planta en 500 ms, singenerar sobre tiros en la tensión.
Agosto de 2017. 6

Octavo avance de tesis.
2*cdV
2
cdv
cdpGPC(11) Σ
sC qe �
2
PMMC
Figura 6. Diagrama a bloques del controlador tipo GPC
En la figura 7(b) se muestra la señal de control, la cual modifica la cantidad de potencia que se le exige al convertidor paramantener regulado el vcd . Por ejemplo, cuando el tiempo es igual a 4 s, se exige una inversión de la potencia del 100% lo quehace que el controlador genere una señal de cambio que llega hasta los �2 pu.
0 2 4 6 8Tiempo [s]
0.980.99
11.011.02
Salid
a [P
U] Vcd
*
Vcd
(a) Salida de la planta en pu.
0 2 4 6 8Tiempo [s]
-2.5
0
2.5
5
Con
trol [
PU] Pcd
(b) Referencia de potencia del MMC en pu.
Figura 7. Comportamiento del GPC.
La figura 8 presenta el comportamiento del error en estado estable del sistema en lazo cerrado, el cual alcanza tan solo el 1.1%incluso durante la inversión completa de la potencia del convertidor. Aun cuando existe un error, éste se encuentra dentro delo que indica la norma NMX-J-098-ANCE-1999, la cual establece que las variaciones máximas permitidas son de un 5% paraeste rango de niveles de tensión.
0 2 4 6 8Tiempo [s]
0
1
2
Erro
r [%
] Error
Figura 8. Porcentaje de error de la tensión en el enlace.
5. Sistema de transmisión multipuerto
El esquema de la figura 1 muestra un sistema de transmisión que cuenta con dos puntos de conexión y un tercer puerto quesuministra energía suplementaria. Cabe destacar que la transferencia de la mayor cantidad de energía se da entre ambas redesen ca a través de los MMC y el tercer puerto fija la tensión en el enlace al mismo tiempo que aporta una pequeña cantidad deenergía.
El esquema propuesto implementa dos MMC idénticos de diez niveles cada uno y el resto de los parámetros del sistema sondescritos en la tabla 1. Para llevar a cabo la implementación dentro del DRTS se utiliza la misma configuración multinúcleocon el propósito que T s = 50 µs y se hace uso del núcleo disponible.
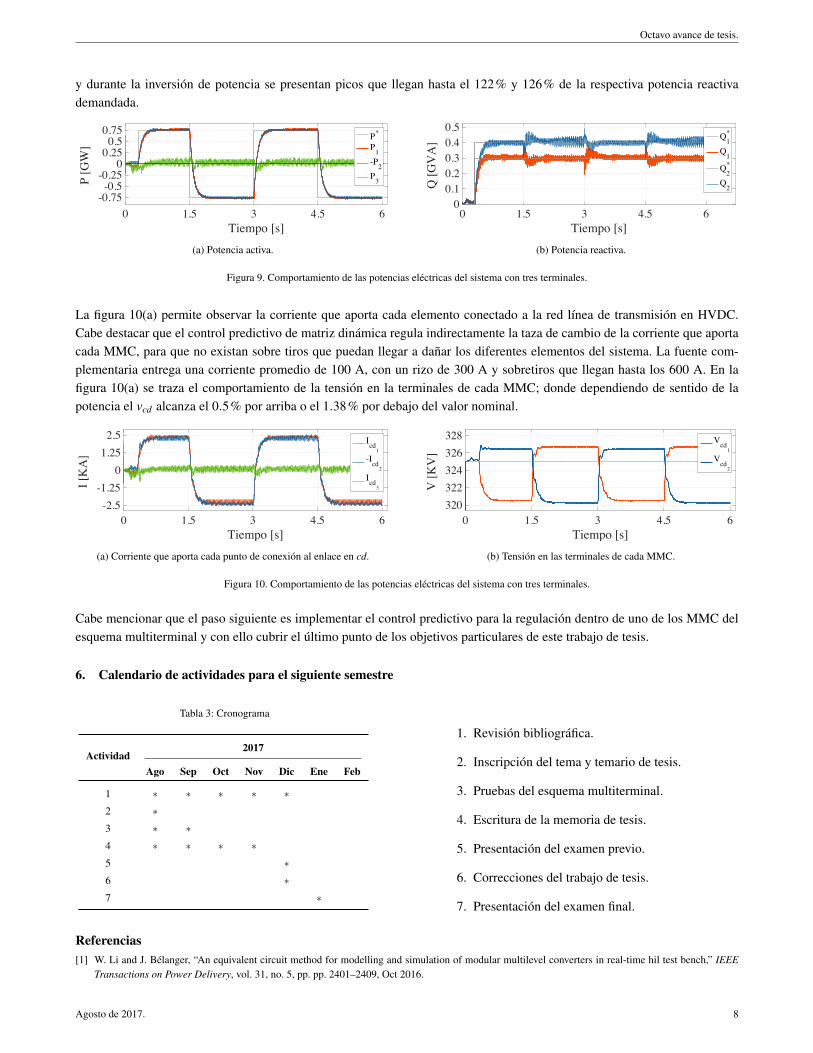
En la figura 9(a) se exhibe la cantidad de potencia que entrega cada uno de los puntos de conexión, la mayor cantidad depotencia activa fluye entre el MMC1 y el MMC2. El tercer puerto fija la tensión y aporta una potencia cercana a cero, quepresenta picos que llegan a los ±0.17 GW con un rizo de 25 MW, que es mayor que el rizo de las otras dos potencias. Lapotencia reactiva que inyecta cada MMC se muestra en la figura 9(b), donde se aprecia que tienen diferentes magnitudes
Agosto de 2017. 7
Octavo avance de tesis.
y durante la inversión de potencia se presentan picos que llegan hasta el 122% y 126% de la respectiva potencia reactivademandada.
0 1.5 3 4.5 6Tiempo [s]
-0.75-0.5
-0.250
0.250.5
0.75
P [G
W]
P*
P1-P2P3
(a) Potencia activa.
0 1.5 3 4.5 6Tiempo [s]
00.10.20.30.40.5
Q [G
VA
] Q1*
Q1
Q2*
Q2
(b) Potencia reactiva.
Figura 9. Comportamiento de las potencias eléctricas del sistema con tres terminales.
La figura 10(a) permite observar la corriente que aporta cada elemento conectado a la red línea de transmisión en HVDC.Cabe destacar que el control predictivo de matriz dinámica regula indirectamente la taza de cambio de la corriente que aportacada MMC, para que no existan sobre tiros que puedan llegar a dañar los diferentes elementos del sistema. La fuente com-plementaria entrega una corriente promedio de 100 A, con un rizo de 300 A y sobretiros que llegan hasta los 600 A. En lafigura 10(a) se traza el comportamiento de la tensión en la terminales de cada MMC; donde dependiendo de sentido de lapotencia el vcd alcanza el 0.5% por arriba o el 1.38% por debajo del valor nominal.
0 1.5 3 4.5 6Tiempo [s]
-2.5-1.25
01.25
2.5
I [K
A]
Icd1
-Icd2
Icd3
(a) Corriente que aporta cada punto de conexión al enlace en cd.
0 1.5 3 4.5 6Tiempo [s]
320322324326328
V [K
V]
Vcd1
Vcd2
(b) Tensión en las terminales de cada MMC.
Figura 10. Comportamiento de las potencias eléctricas del sistema con tres terminales.
Cabe mencionar que el paso siguiente es implementar el control predictivo para la regulación dentro de uno de los MMC delesquema multiterminal y con ello cubrir el último punto de los objetivos particulares de este trabajo de tesis.
6. Calendario de actividades para el siguiente semestre
Tabla 3: Cronograma
Actividad2017
Ago Sep Oct Nov Dic Ene Feb
1 ⇤ ⇤ ⇤ ⇤ ⇤2 ⇤3 ⇤ ⇤4 ⇤ ⇤ ⇤ ⇤5 ⇤6 ⇤7 ⇤
1. Revisión bibliográfica.
2. Inscripción del tema y temario de tesis.
3. Pruebas del esquema multiterminal.
4. Escritura de la memoria de tesis.
5. Presentación del examen previo.
6. Correcciones del trabajo de tesis.
7. Presentación del examen final.
Referencias[1] W. Li and J. Bélanger, “An equivalent circuit method for modelling and simulation of modular multilevel converters in real-time hil test bench,” IEEE
Transactions on Power Delivery, vol. 31, no. 5, pp. pp. 2401–2409, Oct 2016.
Agosto de 2017. 8

Octavo avance de tesis.
[2] H. Saad, T. Ould-Bachir, J. Mahseredjian, C. Dufour, S. Dennetière, and S. Nguefeu, “Real-time simulation of mmcs using cpu and fpga,” IEEE Transac-tions on Power Electronics, vol. 30, no. 1, pp. 259–267, Jan 2015.
[3] J. Xu, C. Zhao, W. Liu, and C. Guo, “Accelerated model of modular multilevel converters in pscad/emtdc,” IEEE Transactions on Power Delivery,vol. 28, no. 1, pp. 129–136, Jan 2013.
[4] M. D. O. Faruque, T. Strasser, G. Lauss, V. Jalili-Marandi, P. Forsyth, C. Dufour, V. Dinavahi, A. Monti, P. Kotsampopoulos, J. A. Martinez, K. Strunz,M. Saeedifard, X. Wang, D. Shearer, and M. Paolone, “Real-time simulation technologies for power systems design, testing, and analysis,” IEEE Powerand Energy Technology Systems Journal, vol. 2, no. 2, pp. 63–73, June 2015.
[5] S. Dennetiere, H. Saad, B. Clerc, E. Ghahremani, W. Li, and J. Bélanger, “Validation of a mmc model in a real-time simulation platform for industrialhil tests,” in 2015 IEEE Power Energy Society General Meeting, July 2015, pp. 1–5.
[6] J. Rohten, P. Zanchetta, M. Rivera, J. Muñoz, J. Espinoza, and J. Silva, “Multivariable control for a three-phase rectifier based on deadbeat algorithm,”in IECON 2016 - 42nd Annual Conference of the IEEE Industrial Electronics Society, Oct 2016, pp. 5977–5982.
[7] E. Camacho and C. Alba, Model Predictive Control, ser. Advanced Textbooks in Control and Signal Processing. Springer, 2013.
Agosto de 2017. 9