UNIVERSIDAD AUTONOMA METROPOLITANA148.206.53.84/tesiuami/UAMI12153.pdf · basado en un oscilador de...
48
1 UNIVERSIDAD AUTONOMA METROPOLITANA Unidad: Iztapalapa. División: Ciencias Básicas e Ingeniería. Grado: Licenciatura en Ingeniería Electrónica. DISEÑO, SIMULACIÓN E IMPLEMENTACIÓN DE UN RADAR. Alumno: Espino Briones Néstor. Asesor: Profr. Othón Gandarilla Carrillo. Firma: UAMI. Depto. de Ingeniería Eléctrica. México D. F. 20 de Mayo del 2005.
Transcript of UNIVERSIDAD AUTONOMA METROPOLITANA148.206.53.84/tesiuami/UAMI12153.pdf · basado en un oscilador de...
1
UNIVERSIDAD AUTONOMA METROPOLITANA
Unidad: Iztapalapa.
División: Ciencias Básicas e Ingeniería.
Grado: Licenciatura en Ingeniería Electrónica.
DISEÑO, SIMULACIÓN E IMPLEMENTACIÓN DE UNRADAR.
Alumno:Espino Briones Néstor.
Asesor:Profr. Othón Gandarilla Carrillo.
Firma:
UAMI. Depto. de Ingeniería Eléctrica. México D. F. 20 de Mayo del 2005.

2
ÍNDICE.
Índice...................................................................................................................... 2.
I. Resumen..............................................................................................................3.
II. Introducción.........................................................................................................3.
III. Marco teórico......................................................................................................4.
IV. Descripción del equipo.....................................................................................30.
V. Desarrollo experimental.....................................................................................32.
VI. Cálculo..............................................................................................................36.
VII. Resultados.......................................................................................................44.
VIII. Conclusiones..................................................................................................46.
IX. Bibliografía........................................................................................................47.

3
I. Resumen.
Se estudiaron el principio de operación y los parámetros básicos que definen el funcionamiento deun sistema de radar. Se identificaron los diferentes tipos de radares, su modo de operación y susaplicaciones. Observamos los bloques funcionales (subsistemas básicos) que en conjuntoconforman un sistema de radar. Se hizo un reconocimiento de los componentes, con que cuenta laUAMI, para transmisión y recepción de microondas.Considerando las limitaciones del equipo, se realizó un radar de onda continua (CW) en banda X,basado en un oscilador de diodo Gunn, la T híbrida ó mágica y un acoplador direccional.Se obtuvo la detección de un objeto en movimiento, y se determinó su velocidad.
II. Introducción.
Como hemos podido observar, en los últimos años, debido al rápido desarrollo delas telecomunicaciones, se ha hecho esencial conocer más acerca delfuncionamiento de los sistemas que utilizan microondas. Este conocimientonecesita una comprensión de la teoría electromagnética, fundamental para eldesarrollo de dichos sistemas.
Al estar cursando la licenciatura en ingeniería en electrónica con especialidad encomunicaciones, a los alumnos nos imparten tres materias relacionadas con lateoría electromagnética: electromagnetismo I, electromagnetismo II ycomunicaciones VI.
Es por eso de interés desarrollar algún sistema que utilice microondas, paraconocer prácticamente el funcionamiento de los dispositivos físicos necesariospara realizar uno de dichos sistemas. Por lo tanto se decidió participar en elproyecto diseño, simulación e implementación de un radar.

4
III. Marco teórico.RADAR es un acrónimo de RAdio Detection And Ranging (radio detección yclasificación o radio detección y reconocimiento), es un dispositivo activo depercepción remota que opera en el rango de las microondas. Un radar estaconstituido fundamentalmente por un transmisor, un receptor, una antena y unsistema electrónico para procesar y almacenar datos.Los primeros sistemas de radar surgen en los años 30 s, para detectar lapresencia de barcos y medir su proximidad. Los radares que producen imágenesse comenzaron a usar en los años 50 s, fueron desarrollados para usos militares.
Funcionamiento básico:Como se muestra en la figura 1, el transmisor genera pequeños trenes de pulsossucesivos (típicamente entre 10-6 y 10-8 s) (A) a intervalos regulares, los cuales seenfocan por medio de la antena en un haz (B), el haz del radar incide la superficiea observar oblicuamente, siendo perpendicular a la plataforma del transmisor. Laantena recibe la porción de energía reflejada por varios objetos dentro del rangodel haz incidente (C).
Figura 1.
Midiendo el retardo en tiempo entre la transmisión de un tren de pulsos y larecepción del eco reflejado por diferentes objetos (blancos), se puede determinarsu distancia y localización con respecto al radar, las señales reflejadas sonalmacenadas y procesadas para construir una imagen de dos dimensiones de lasuperficie monitoreada.
Designación de las bandas de radar:La región de microondas del espectro electromagnético es bastante grande encomparación con la región del visible y del infrarrojo. Hay varios rangos de longitudde onda o bandas usadas comúnmente a cada una se le asigno un código durantela segunda guerra mundial, como se muestra en la figura 2, esta codificacióncontinúa hasta nuestros días.

5
• Las bandas Ka (0.75-1.1 cm), K (1.1-1.67 cm), Ku (1.67-2.4 cm): Tienenlongitud de onda muy pequeña, usadas en los primeros sistemas de radaraéreos pero actualmente son poco comunes.
• La banda X (2.4-3.75 cm): se usa extensivamente en sistemas aéreos parareconocimiento militar y mapeo de terreno.
• La banda C (3.75-7.5 cm): común en muchos sistemas aéreos deinvestigación (CCRS Convair-580 y NASA AirSAR) y sistemas espaciales(ERS-1 y 2, y RADARSAT).
• La banda S (7.5-15 cm): usada a bordo del satélite ruso ALMAZ.• La banda L (15-30 cm): usada a bordo del satélite americano SEASAT, del
satélite japonés JERS-1 y en sistemas aéreos de la NASA.• La banda P (30-100 cm): con las longitudes de onda para radar más largas,
usadas en sistemas de investigación aéreos experimentales de la NASA.
Figura 2.
Dos imágenes del mismo sitio tomadas con radares de bandas diferentes nolucen iguales, esto se debe a que la energía de cada radar interactúa demanera diferente con los elementos de la superficie a observar, dependiendode la longitud de onda del radar.
6
Ventajas del radar sobre otros sistemas de percepción remota:La ventaja principal de los sensores de radar sobre los sensores ópticos yaceen la capacidad de los sensores de radar de operar día y noche y bajocualquier condición climática.Ya que los sistemas de radar incluyen su propia fuente de energía, lasimágenes se pueden obtener de día o de noche.
Debido a que las radiaciones de microondas tienen una longitud de ondaapreciable, un sensor de radar es capaz de observar a través de niebla, dellovizna, de nieve, nubes y humo, por lo que este tipo de sensores son paratodo clima.
La única desventaja de los sistemas de radar es que requieren un alto gradode sofisticación en su elaboración.
Polarización de una señal de radar:Las ondas electromagnéticas no polarizadas vibran en todas las direccionesposibles perpendiculares a la dirección de viaje. La polarización se refiere a laacción que hace que las vibraciones de las ondas electromagnéticas sean soloen una orientación perpendicular a la dirección de viaje, en otras palabras lapolarización se refiere a la orientación del campo eléctrico.La mayoría de los radares se diseñan para transmitir microondas polarizadashorizontalmente (H), o polarizadas verticalmente (V). De manera similar laantena recibe la energía reflejada polarizada horizontalmente o verticalmente,algunos radares pueden recibir ambas.De lo anterior se observa que hay cuatro combinaciones de polarización:
• HH para transmisión horizontal y recepción horizontal.• VV para transmisión vertical y recepción vertical.• HV para transmisión horizontal y recepción vertical.• VH para transmisión vertical y recepción horizontal.
A los tipos HH y VV se les conoce como polarización similar (like-polarized),mientras que a los tipos HV y VH se les conoce como polarización cruzada(cross-polarized).De manera similar a las variaciones en longitud de onda, dependiendo de lapolarización transmitida y recibida, la radiación interactuará y será reflejada deforma diferente por la superficie, así las imágenes de radar obtenidas usandodiferentes combinaciones de polarización y longitud de onda proveeráninformación diferente y complementaria acerca de los blancos en la superficie.
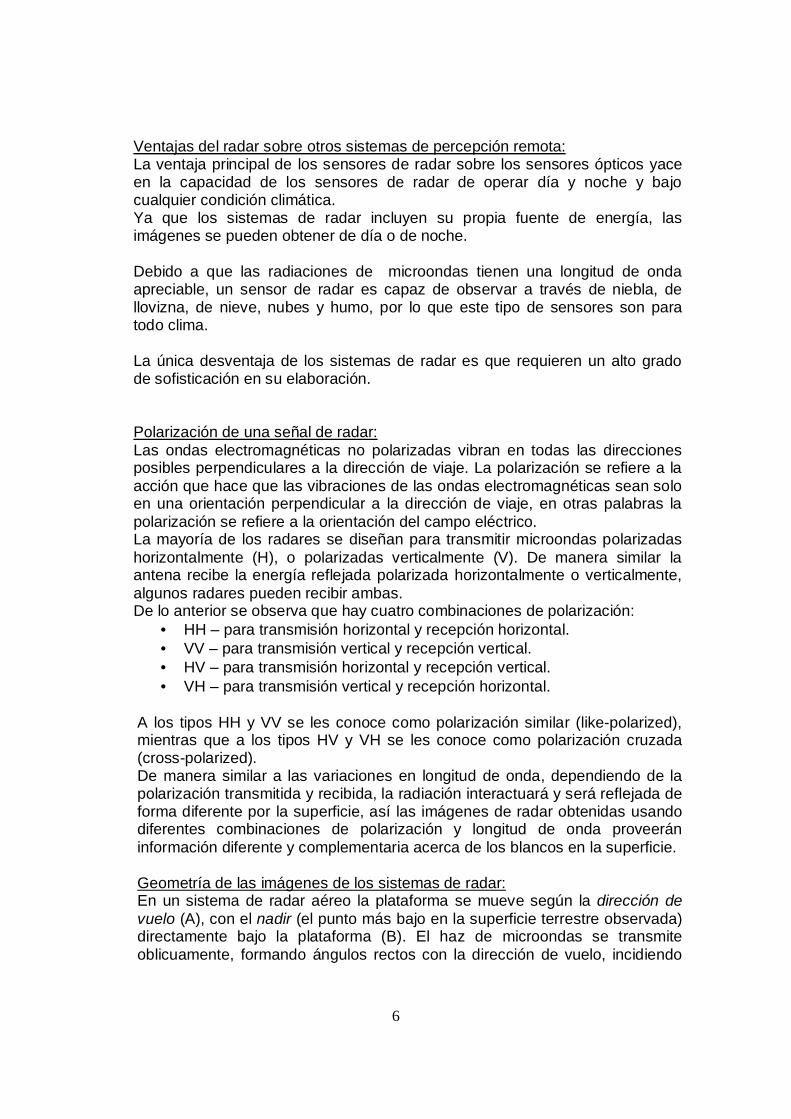
Geometría de las imágenes de los sistemas de radar:En un sistema de radar aéreo la plataforma se mueve según la dirección devuelo (A), con el nadir (el punto más bajo en la superficie terrestre observada)directamente bajo la plataforma (B). El haz de microondas se transmiteoblicuamente, formando ángulos rectos con la dirección de vuelo, incidiendo
7
sobre una porción de superficie (swath) (C) la cual no esta alineada con elnadir. El rango (D) se refiere a la dimensión de la traza transversal (across-track) perpendicular a la dirección de vuelo, mientras que el azimut (E) serefiere a la dimensión de la traza longitudinal (along-track) paralelo a ladirección de vuelo, como se muestra en la figura 3. Esta geometría deobservación lateral es típica de los radares de imágenes (aéreos oespaciales).
Figura 3.
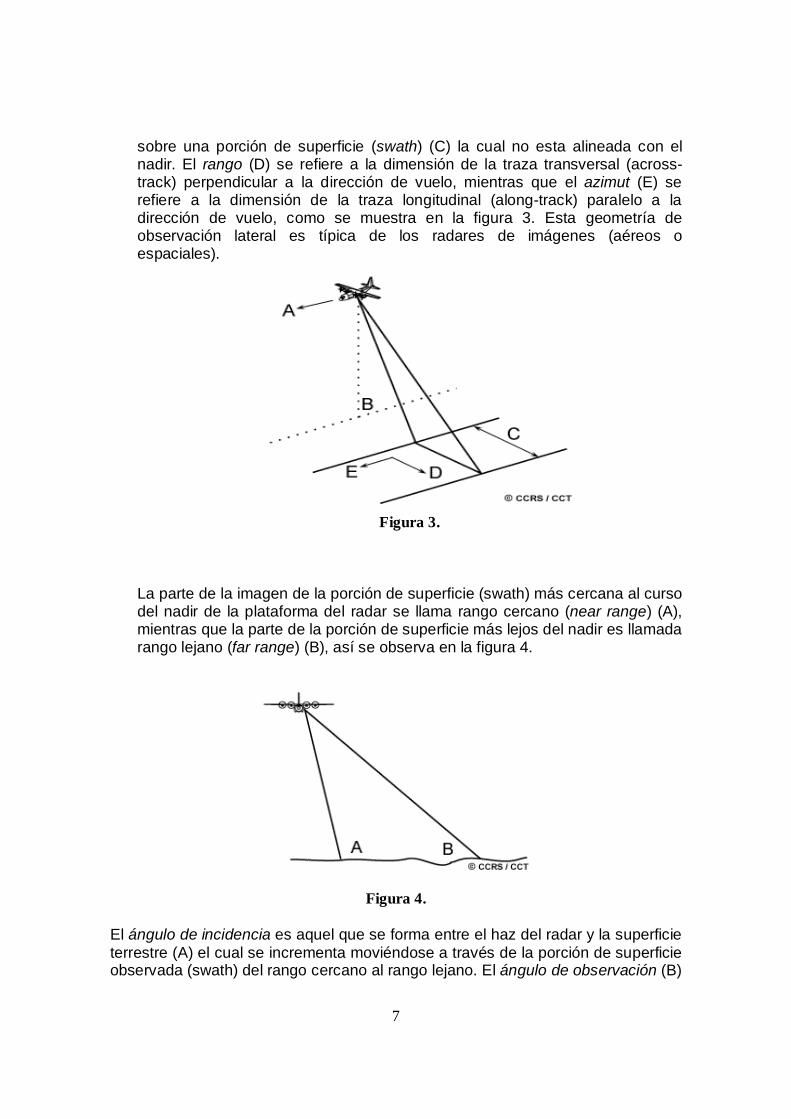
La parte de la imagen de la porción de superficie (swath) más cercana al cursodel nadir de la plataforma del radar se llama rango cercano (near range) (A),mientras que la parte de la porción de superficie más lejos del nadir es llamadarango lejano (far range) (B), así se observa en la figura 4.
Figura 4.
El ángulo de incidencia es aquel que se forma entre el haz del radar y la superficieterrestre (A) el cual se incrementa moviéndose a través de la porción de superficieobservada (swath) del rango cercano al rango lejano. El ángulo de observación (B)

8
es el ángulo al cual el radar mira la superficie. En el rango cercano la geometría deobservación se considera más vertical en relación con el rango lejano donde lageometría de observación es más superflua. A cualquier rango la antena mide lalínea radial de la distancia de vista entre el radar y cada objeto (target) de lasuperficie, esta es la distancia del rango de inclinación (slant range distance) (C).La distancia del rango de tierra (ground range distance) (D) es la distanciahorizontal real sobre la superficie correspondiente a cada punto medido en elrango de inclinación. Así se muestra en la figura 5.
Figura 5.
La resolución espacial del radar se da en función de las propiedades específicasde la radiación de microondas y de los efectos geométricos. Si se usa un Radar deApertura Real (RAR) para la formación de imágenes (como en un radar aéreo deobservación lateral), la resolución depende de la longitud efectiva del pulso en ladirección del rango de inclinación, y del ancho de la iluminación (del haz) en ladirección azimutal.
El rango o la resolución en la traza transversal (across-track resolution) dependede la duración del pulso (P). Dos blancos distintos en la superficie seránacomodados en la dimensión del rango si su separación es mayor que la mitad dela duración del pulso, en la figura 6 se muestra un ejemplo: los blancos 1 y 2 noserán separables mientras que los blancos 3 y 4 si lo serán.
Figura 6.

9
La resolución en el rango de inclinación permanece constante,independientemente de la resolución en la traza transversal. Sin embargo cuandose proyecta a coordenadas del rango terrestre, la resolución en este rangodependerá del ángulo de incidencia, así para una resolución fija en el rango deinclinación, la resolución en el rango de tierra disminuirá al aumentar la resoluciónen la traza transversal.
La resolución azimutal esta determinada por la anchura angular del haz demicroondas y de la distancia del rango de inclinación. El ancho del haz (A) es unamedida del ancho del patrón de incidencia. A medida que la incidencia del radar sepropaga a distancias mayores del sensor, la resolución azimutal se incrementa(haciéndose más burda). En la figura 7, los blancos 1 y 2 en el rango cercanoserían separables, pero los blancos 3 y 4 en el rango lejano no lo serían.
Figura 7.
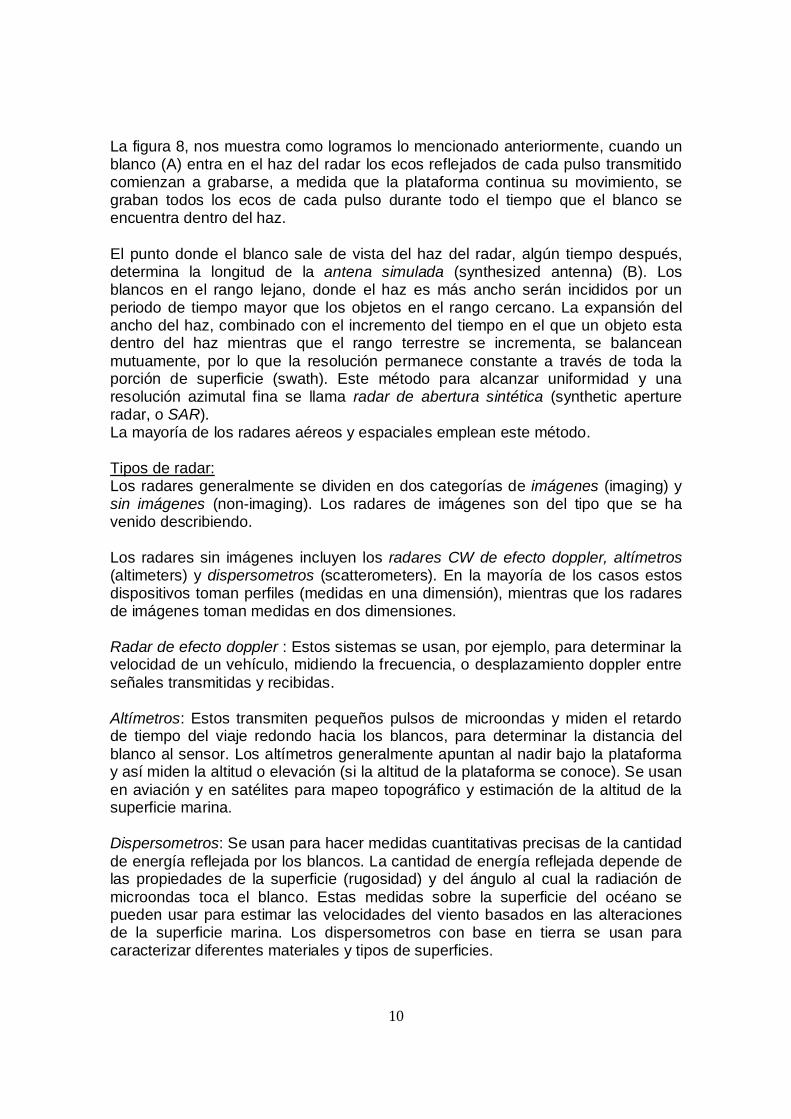
El ancho del haz del radar es inversamente proporcional a la longitud de la antena(también conocida como abertura o rendija), lo que implica que una antena mayor(o abertura) producirá un haz más angosto y una resolución más fina.Una resolución más fina en la traza transversal se puede lograr usando un pulsode menor duración, lo cual puede realizarse con ciertas restricciones de diseño.Una resolución azimutal más fina se puede lograr incrementando la longitud de laantena, sin embargo la longitud real esta limitada por el peso que puede sostenerla plataforma aérea o espacial. Para radares aéreos, las antenas son típicamentede 1 o 2 metros, para satélites pueden ser de 10 a 15 metros. Para superar estalimitación de tamaño, se usan el movimiento de la plataforma y, unalmacenamiento y procesamiento especial del eco reflejado, simulando unaantena muy grande y así se incrementa la resolución azimutal.
Figura 8.
10
La figura 8, nos muestra como logramos lo mencionado anteriormente, cuando unblanco (A) entra en el haz del radar los ecos reflejados de cada pulso transmitidocomienzan a grabarse, a medida que la plataforma continua su movimiento, segraban todos los ecos de cada pulso durante todo el tiempo que el blanco seencuentra dentro del haz.
El punto donde el blanco sale de vista del haz del radar, algún tiempo después,determina la longitud de la antena simulada (synthesized antenna) (B). Losblancos en el rango lejano, donde el haz es más ancho serán incididos por unperiodo de tiempo mayor que los objetos en el rango cercano. La expansión delancho del haz, combinado con el incremento del tiempo en el que un objeto estadentro del haz mientras que el rango terrestre se incrementa, se balanceanmutuamente, por lo que la resolución permanece constante a través de toda laporción de superficie (swath). Este método para alcanzar uniformidad y unaresolución azimutal fina se llama radar de abertura sintética (synthetic apertureradar, o SAR).La mayoría de los radares aéreos y espaciales emplean este método.
Tipos de radar:Los radares generalmente se dividen en dos categorías de imágenes (imaging) ysin imágenes (non-imaging). Los radares de imágenes son del tipo que se havenido describiendo.
Los radares sin imágenes incluyen los radares CW de efecto doppler, altímetros(altimeters) y dispersometros (scatterometers). En la mayoría de los casos estosdispositivos toman perfiles (medidas en una dimensión), mientras que los radaresde imágenes toman medidas en dos dimensiones.
Radar de efecto doppler : Estos sistemas se usan, por ejemplo, para determinar lavelocidad de un vehículo, midiendo la frecuencia, o desplazamiento doppler entreseñales transmitidas y recibidas.
Altímetros: Estos transmiten pequeños pulsos de microondas y miden el retardode tiempo del viaje redondo hacia los blancos, para determinar la distancia delblanco al sensor. Los altímetros generalmente apuntan al nadir bajo la plataformay así miden la altitud o elevación (si la altitud de la plataforma se conoce). Se usanen aviación y en satélites para mapeo topográfico y estimación de la altitud de lasuperficie marina.
Dispersometros: Se usan para hacer medidas cuantitativas precisas de la cantidadde energía reflejada por los blancos. La cantidad de energía reflejada depende delas propiedades de la superficie (rugosidad) y del ángulo al cual la radiación demicroondas toca el blanco. Estas medidas sobre la superficie del océano sepueden usar para estimar las velocidades del viento basados en las alteracionesde la superficie marina. Los dispersometros con base en tierra se usan paracaracterizar diferentes materiales y tipos de superficies.
11
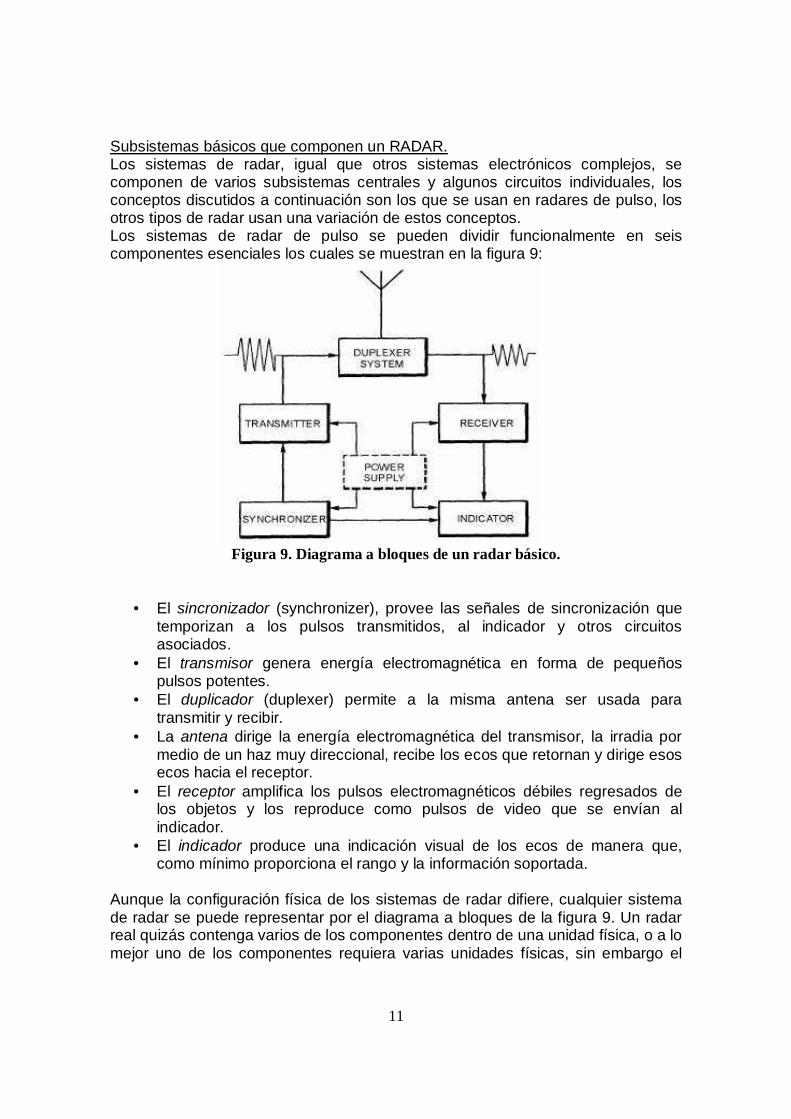
Subsistemas básicos que componen un RADAR.Los sistemas de radar, igual que otros sistemas electrónicos complejos, secomponen de varios subsistemas centrales y algunos circuitos individuales, losconceptos discutidos a continuación son los que se usan en radares de pulso, losotros tipos de radar usan una variación de estos conceptos.Los sistemas de radar de pulso se pueden dividir funcionalmente en seiscomponentes esenciales los cuales se muestran en la figura 9:
Figura 9. Diagrama a bloques de un radar básico.
• El sincronizador (synchronizer), provee las señales de sincronización quetemporizan a los pulsos transmitidos, al indicador y otros circuitosasociados.
• El transmisor genera energía electromagnética en forma de pequeñospulsos potentes.
• El duplicador (duplexer) permite a la misma antena ser usada paratransmitir y recibir.
• La antena dirige la energía electromagnética del transmisor, la irradia pormedio de un haz muy direccional, recibe los ecos que retornan y dirige esosecos hacia el receptor.
• El receptor amplifica los pulsos electromagnéticos débiles regresados delos objetos y los reproduce como pulsos de video que se envían alindicador.
• El indicador produce una indicación visual de los ecos de manera que,como mínimo proporciona el rango y la información soportada.
Aunque la configuración física de los sistemas de radar difiere, cualquier sistemade radar se puede representar por el diagrama a bloques de la figura 9. Un radarreal quizás contenga varios de los componentes dentro de una unidad física, o a lomejor uno de los componentes requiera varias unidades físicas, sin embargo el
12
diagrama funcional se puede usar para analizar la operación de casi cualquiersistema de radar.
A continuación se da una descripción más detallada de cada uno de lossubsistemas.
SINCRONIZADOR (TIMER): El sincronizador asegura que todos los circuitos conectados al sistemaoperan con una relación de tiempo definida. Este también sincroniza el intervalode tiempo entre pulsos transmitidos para asegurar que el intervalo es de longitudadecuada. Los pulsos de temporización se usan para asegurar la operaciónsíncrona de los circuitos y están relacionados con la frecuencia de repetición depulso (pulse repetition frecuency, PRF). La PRF se obtiene de algún osciladorestable, tal como un oscilador sinusoidal, multivibrador o un oscilador de bloqueo.La salida del oscilador se aplica entonces a los circuitos de formación de pulsopara producir los pulsos de sincronización. Los componentes asociados puedenser temporizados por la salida del sincronizador o por una señal de sincronizacióndel transmisor cuando este se sintoniza.La función específica del sincronizador es producir PULSOS DE DISPARO queactivan al transmisor, a los circuitos de barrido del indicador y a los circuitos declasificación (ranging). Los circuitos de un equipo de radar efectúan sus funcionesde control y temporización produciendo una variedad de formas de onda devoltaje, tales como ondas cuadradas, diente de sierra, trapezoidales, brevespulsos rectangulares, y picos agudos.
Modo de operación:Los sistemas de radar pueden clasificarse como auto sincronizados o desincronización externa. En un sistema auto sincronizado, los disparos detemporización son generados en el transmisor. En un sistema de sincronizaciónexterna, los pulsos de disparo de temporización son generados por un osciladormaestro, el cual es externo al transmisor.El oscilador maestro, puede ser un oscilador de bloqueo, un oscilador sinusoidal, oun multivibrador astable. Cuando se usa un oscilador de bloqueo, los pulsos dedisparo de temporización se obtiene directamente del oscilador, si se usan losotros tipos se necesitan utilizar circuitos de formación de ondas para crear lospulsos de disparo de temporización.En un sistema de sincronización externa, la tasa de repetición de pulso (pulserepetition rate, PRR) de los disparos de temporización del oscilador maestrodetermina la PRR de el transmisor. En un sistema auto sincronizado, la PRR delos disparos de temporización es determinada por la PRR del modulador o deltransmisor.
Los pulsos de disparo del sincronizador se usan frecuentemente para producirpulsos de habilitación (o de compuerta) para el indicador, estos pulsos dehabilitación llevan a cabo las siguientes funciones:
1. Inicializar y sincronizar la duración del barrido de voltaje en el indicador.
13
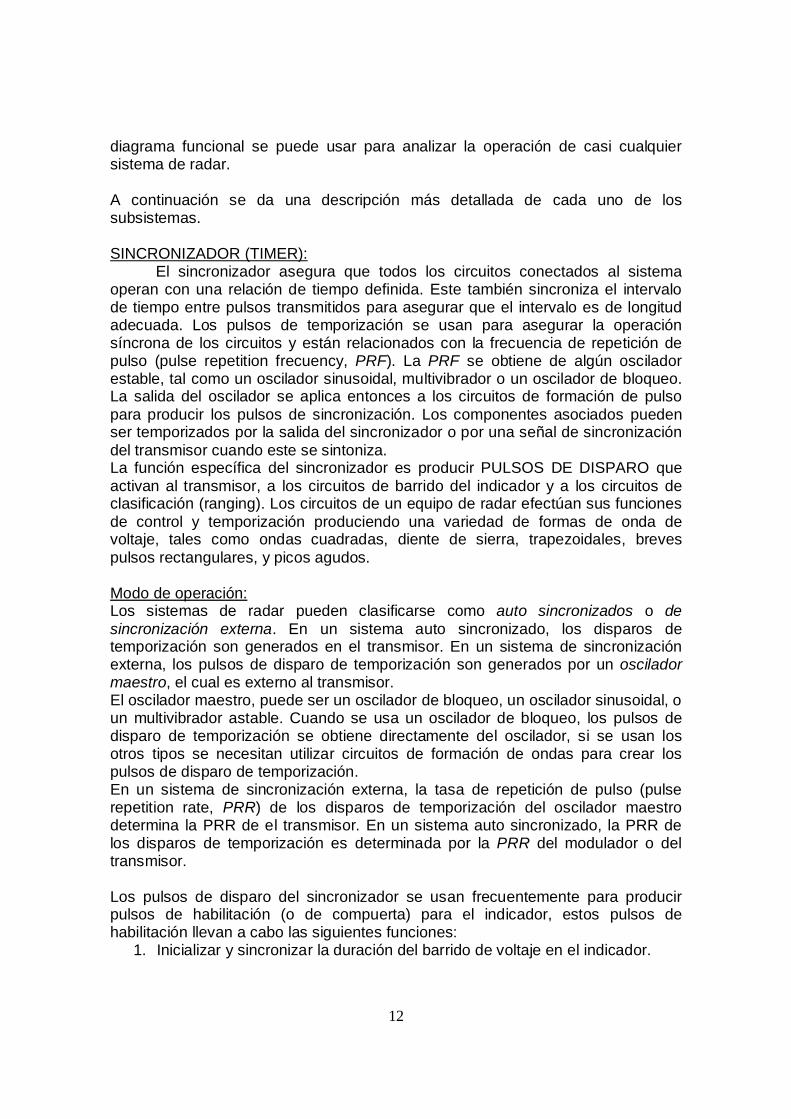
2. Intensificar el haz de electrones en el tubo de rayos catódicos (CRT)durante el periodo de barrido.
3. Activar un generador para marcar el rango, el cual nos sirve cuando sequiere superponer dos señales en el indicador.
La figura 10 muestra las relaciones de los diferentes tipos de onda en un sistemade radar. Los disparos de temporización son aplicados al transmisor y al indicador.Cuando se aplica un pulso de disparo al transmisor se genera un pequeño tren depulsos (energía de radio frecuencia).
Figura 10. Relaciones de tiempo de la formas de onda.
La energía del transmisor se conduce a lo largo de una línea de transmisión haciala antena y se irradia en el espacio. Cuando esta energía choca con uno o másobjetos en su trayectoria una parte de la energía es reflejada hacia la antena como
14
pulsos de eco. Los ecos de tres blancos a diferente rango se ilustran en lafigura10. Estos ecos se convierten a sus señales de salida correspondientes comose muestra en la figura. Los pulsos más largos (inicial y final) en la señal de salidadel receptor son causados por la energía que escapa del duplicador cuando seesta transmitiendo un pulso.
Circuitos básicos para sincronizador:El circuito básico de sincronizador debe reunir los siguientes requerimientosbásicos:
1. Debe ser astable, ya que el sincronizador es el corazón del radar, debeestablecer la referencia de tiempo cero y la frecuencia de repetición depulso (PRF o PRR).
2. Debe ser estable en la frecuencia. Para una rastreo preciso, la PRR y surecíproco, el tiempo de repetición de pulso (PRT), no debe cambiar entrepulsos.
3. La frecuencia debe ser variable para que el radar pueda operar endiferentes rangos.
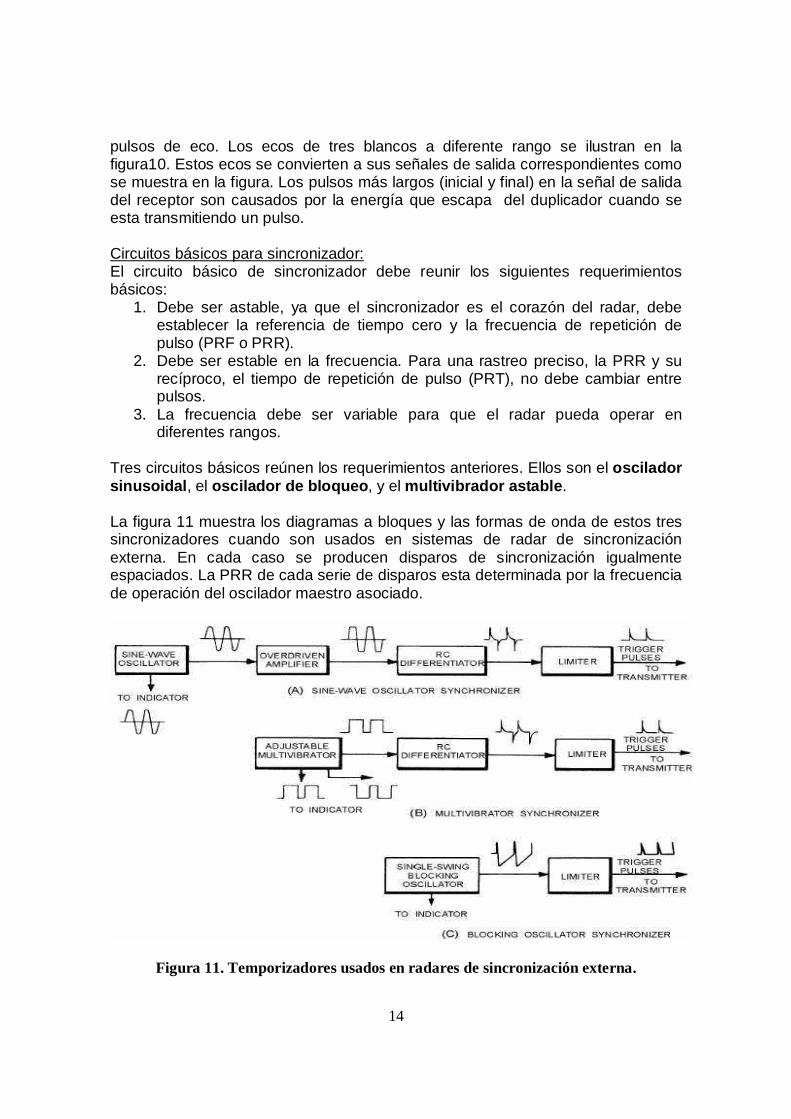
Tres circuitos básicos reúnen los requerimientos anteriores. Ellos son el osciladorsinusoidal, el oscilador de bloqueo, y el multivibrador astable.
La figura 11 muestra los diagramas a bloques y las formas de onda de estos tressincronizadores cuando son usados en sistemas de radar de sincronizaciónexterna. En cada caso se producen disparos de sincronización igualmenteespaciados. La PRR de cada serie de disparos esta determinada por la frecuenciade operación del oscilador maestro asociado.
Figura 11. Temporizadores usados en radares de sincronización externa.

15
Sincronizador de oscilador sinusoidal:En este sincronizador se usa un oscilador sinusoidal como oscilador maestro. Lasalida del oscilador se aplica a un amplificador saturado y al indicador del radar.Las ondas senoidales aplicadas al amplificador toman la forma de ondascuadradas. Estas ondas cuadradas son convertidas en disparos de sincronizaciónpositivos y negativos por medio de un diferenciador RC de constante de tiempocorta. Por medio de un limitador se remueven los disparos negativos deldiferenciador.La desventaja de este tipo de sincronizador es el número de etapas que serequieren para producir los disparos de sincronización.
Sincronizador de multivibrador astable:Aquí el oscilador maestro es un multivibrador astable. El multivibrador puede sersimétrico o asimétrico. Si es asimétrico genera ondas rectangulares positivas ynegativas, si es simétrico genera ondas cuadradas. Las ondas rectangularespositivas se aplican al diferenciador RC y son convertidas en disparos positivos ynegativos. Sin importar la simetría, los disparos de temporización quedanigualmente espaciados después que el limitador elimina los lóbulos negativos.Las ondas rectangulares positivas y negativas del multivibrador son aplicadas alindicador. Unas se usan para intensificar el haz de electrones del CRT durante laduración del barrido, las otras se usan para inicializar el generador del marcadorde rango.
Sincronizador de oscilador de bloqueo de vibración simple:En este tipo de sincronizador se usa un oscilador de bloqueo de vibración simplede auto inicio como oscilador maestro. La ventaja de este oscilador es que generapulsos de disparo agudos sin necesidad de circuitos adicionales. Los disparos desincronización de una polaridad se obtienen por medio de un limitador.Los pulsos de inicio para los circuitos del indicador se producen aplicando la salidadel oscilador a un multivibrador de un tiro u otro circuito de retardo de tiempovariable (no mostrado). Los osciladores controlados por cristal se usan cuando serequieren aplicaciones con frecuencia de operación muy estable.
TRANSMISOR: El transmisor genera pulsos potentes de energía electromagnética aintervalos precisos, que son radiados en el espacio por la antena. Se usan dostipos de transmisor principalmente, el primero es el oscilador conmutado (KEYED-OSCILATOR), en este transmisor una etapa o válvula de vacío (bulbo),usualmente un magnetrón, produce el pulso de RF. El bulbo del oscilador esconmutado por un pulso de DC de potencia alta generado por una unidadseparada llamada MODULADOR. El segundo tipo de transmisor consiste de unacadena de amplificadores de potencia. Este sistema de transmisor comienza conun pulso de potencia muy baja, este pulso es amplificado por una serie deamplificadores de potencia hasta obtener el nivel de potencia adecuada para elpulso del transmisor. En la mayoría de los transmisores de amplificador depotencia, cada una de las etapas de potencia es modulada en pulso de manera
16
similar al oscilador de conmutación. Ya que el modulador es común a ambos tiposde transmisor a continuación se describe su funcionamiento.
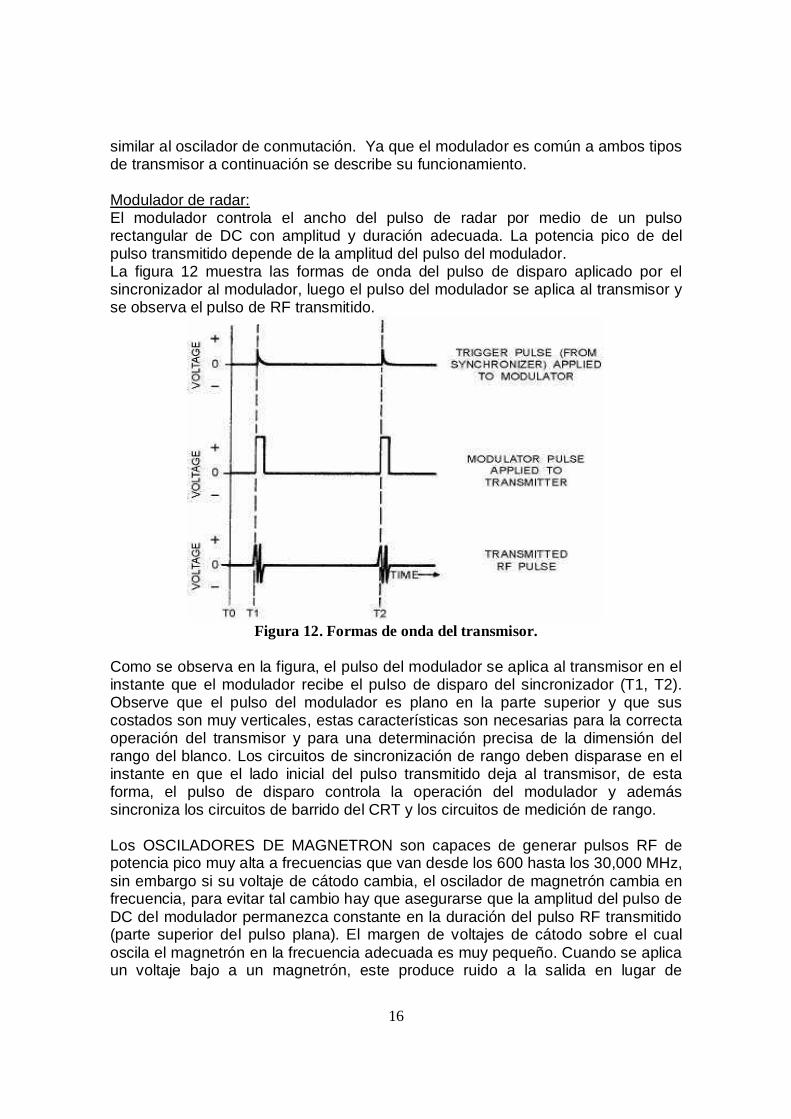
Modulador de radar:El modulador controla el ancho del pulso de radar por medio de un pulsorectangular de DC con amplitud y duración adecuada. La potencia pico de delpulso transmitido depende de la amplitud del pulso del modulador.La figura 12 muestra las formas de onda del pulso de disparo aplicado por elsincronizador al modulador, luego el pulso del modulador se aplica al transmisor yse observa el pulso de RF transmitido.
Figura 12. Formas de onda del transmisor.
Como se observa en la figura, el pulso del modulador se aplica al transmisor en elinstante que el modulador recibe el pulso de disparo del sincronizador (T1, T2).Observe que el pulso del modulador es plano en la parte superior y que suscostados son muy verticales, estas características son necesarias para la correctaoperación del transmisor y para una determinación precisa de la dimensión delrango del blanco. Los circuitos de sincronización de rango deben disparase en elinstante en que el lado inicial del pulso transmitido deja al transmisor, de estaforma, el pulso de disparo controla la operación del modulador y ademássincroniza los circuitos de barrido del CRT y los circuitos de medición de rango.
Los OSCILADORES DE MAGNETRON son capaces de generar pulsos RF depotencia pico muy alta a frecuencias que van desde los 600 hasta los 30,000 MHz,sin embargo si su voltaje de cátodo cambia, el oscilador de magnetrón cambia enfrecuencia, para evitar tal cambio hay que asegurarse que la amplitud del pulso deDC del modulador permanezca constante en la duración del pulso RF transmitido(parte superior del pulso plana). El margen de voltajes de cátodo sobre el cualoscila el magnetrón en la frecuencia adecuada es muy pequeño. Cuando se aplicaun voltaje bajo a un magnetrón, este produce ruido a la salida en lugar de
17
oscilaciones, si este ruido entra al receptor, puede enmascarar los ecos deretorno. Si el pulso del modulador se construye y decae lentamente, se produceruido al principio y final del pulso. Un pulso de modulador efectivo se debe decomportar de la manera siguiente:
• Elevarse de cero a su valor máximo casi instantáneamente.• Permanecer en su valor máximo mientras dure el pulso de RF transmitido.• Caer de su valor máximo a cero casi instantáneamente.
En radares que requieren mediciones precisas, el pulso de RF transmitido debetener lado inicial muy vertical. El lado inicial del eco se usa para la medición delrango, si este lado del eco no es muy vertical y claramente definido, no sonposibles las determinaciones de rango precisas. Los lados inicial y final de losecos tienen la misma forma que los lados inicial y final del pulso de RF transmitido.Un pulso de RF transmitido con lado inicial vertical es esencial para ladeterminación de objetos en el rango cercano. Si el voltaje de salida delmagnetrón decae gradualmente, este contribuye a la energía útil del pulso de RFtransmitido, sin embargo parte del voltaje de salida del magnetrón alcanza alreceptor y obscurece los ecos de objetos cercanos.
Tipos de moduladores:Los dos tipos de moduladores son el modulador de línea pulsante (LINE-PULSINGMODULATOR) y el modulador de bulbo severo (HARD-TUBE MODULATOR: unbulbo severo es un tubo de electrones al alto vacío). El modulador de líneapulsante almacena energía y forma los pulsos en el mismo elemento de circuito. Elmodulador de bulbo severo forma los pulsos en el controlador, este pulso seamplifica y se aplica al modulador. El modulador de bulbo severo se hareemplazado por el modulador de línea pulsante en la mayoría de los casos,debido a que el modulador de bulbo severo tiene baja eficiencia, sus circuitos soncomplejos, requiere una fuente de alimentación de potencia mayor ya que es mássensitivo a los cambios de voltaje.El modulador de línea pulsante es más fácil de mantener debido a que suscircuitos son más simples. Para una cantidad de potencia de salida dada, es másligero y más compacto, este tipo de modulador es el más usado en radaresmodernos. La explicación siguiente hace referencia a este tipo de modulador.La figura 13 muestra las secciones básicas de un modulador de radar, las cualesson:
• La fuente de alimentación.• El elemento de almacenamiento (una red o elemento de circuito utilizado
para almacenar energía).• La impedancia de carga (usada para controlar el tiempo de carga del
elemento de almacenamiento y para prevenir un corto circuito de la fuentede alimentación durante el pulso del modulador)
• El switch del modulador (usado para descargar la energía almacenada através del oscilador del transmisor durante el pulso del modulador).

18
Figura 13. Diagrama a bloque de un modulador de línea pulsante.
La parte (A) de la figura 13 muestra al switch del modulador abierto y al elementode almacenamiento cargando. La parte (B) muestra al switch del moduladorcerrado y al elemento de almacenamiento descargando hacia el transmisor. Laenergía almacenada es liberada en forma de un pulso de modulación de DC depotencia alta. El transmisor convierte el pulso de modulación de DC en un pulsode RF, el cual es radiado al espacio por medio de la antena, así el switch delmodulador se cierra durante la transmisión de un pulso de RF, pero esta abiertoentre pulsos.En los moduladores de radar se usan varios tipos de componentes. La fuente dealimentación generalmente produce una salida de voltaje alto, la corriente puedeser directa o alterna. La impedancia de carga puede ser un resistor o un inductor.El elemento de almacenamiento usualmente es un capacitor, una línea detransmisión artificial o una red para formar pulsos. El switch del modulador esgeneralmente un thyratron (tiratrón: switch de alta energía capaz de manejargrandes cantidades de potencia y de voltaje).
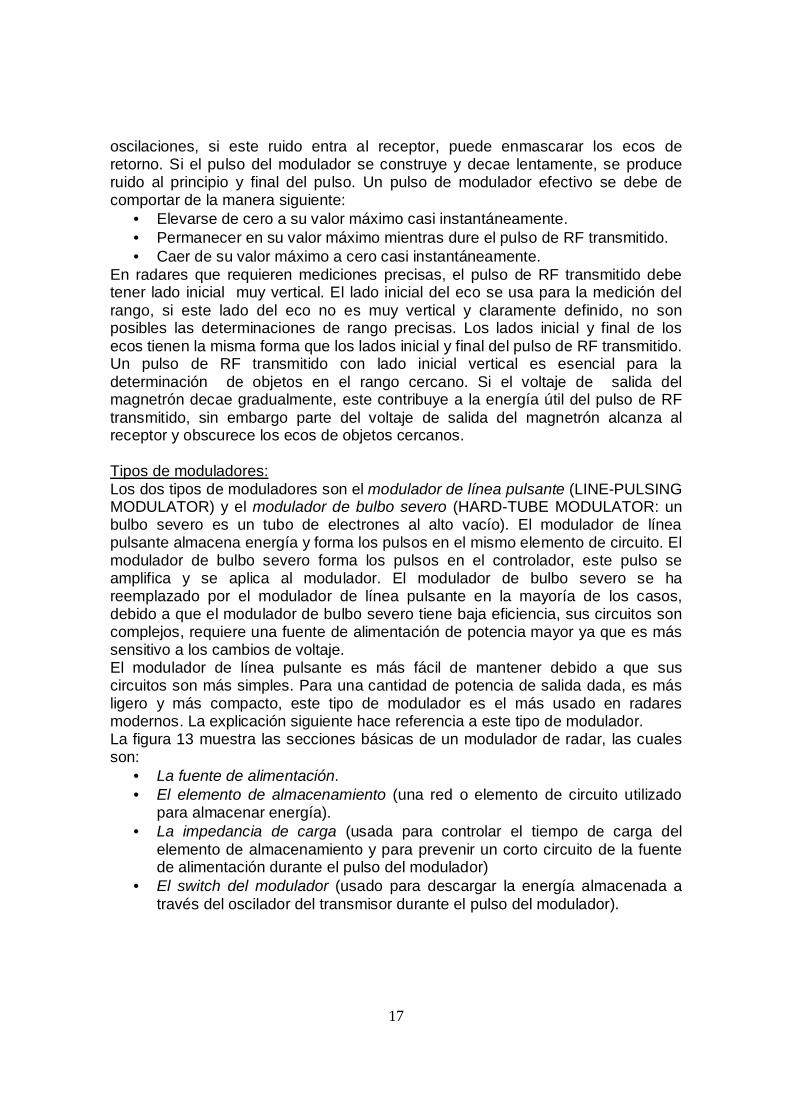
Elemento de almacenamiento del modulador.Los capacitores se usan solo en moduladores que tienen fuente de alimentaciónde DC y switch de tubo de electrones. El capacitor se carga a un voltaje alto pormedio de la fuente de alimentación, este libera solo una pequeña parte de laenergía almacenada hacia el transmisor. El switch del modulador controla la cargay la descarga del capacitor.La línea de transmisión artificial, mostrada en la figura 14, consiste de igualnúmero de capacitores (C) e inductores (L) arreglados para simular secciones deuna línea de transmisión. La línea de transmisión artificial sirve para dospropósitos:
1. Para almacenar energía cuando el switch del modulador esta abierto (entrepulsos de RF transmitidos.
19
2. Para la descarga y formación de un pulso rectangular de DC (pulsomodulador) de la duración requerida cuando el switch del modulador estacerrado.
Figura 14. Elementos de almacenamiento del modulador.
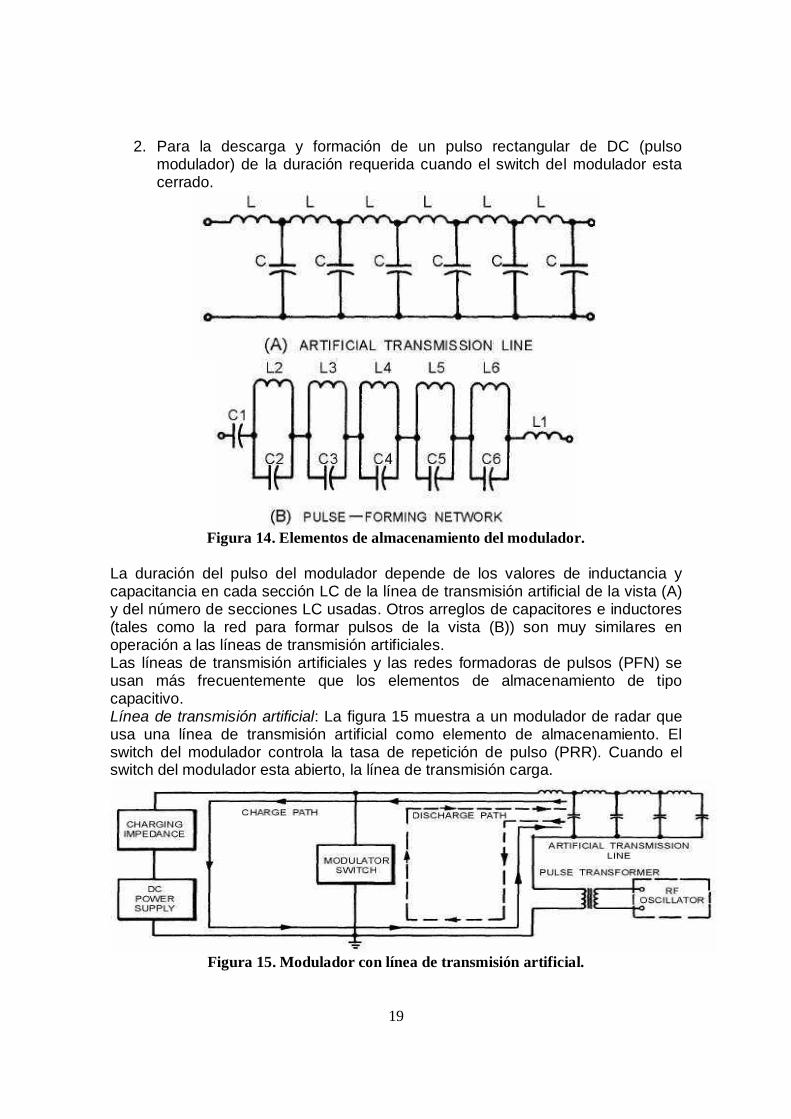
La duración del pulso del modulador depende de los valores de inductancia ycapacitancia en cada sección LC de la línea de transmisión artificial de la vista (A)y del número de secciones LC usadas. Otros arreglos de capacitores e inductores(tales como la red para formar pulsos de la vista (B)) son muy similares enoperación a las líneas de transmisión artificiales.Las líneas de transmisión artificiales y las redes formadoras de pulsos (PFN) seusan más frecuentemente que los elementos de almacenamiento de tipocapacitivo.Línea de transmisión artificial: La figura 15 muestra a un modulador de radar queusa una línea de transmisión artificial como elemento de almacenamiento. Elswitch del modulador controla la tasa de repetición de pulso (PRR). Cuando elswitch del modulador esta abierto, la línea de transmisión carga.
Figura 15. Modulador con línea de transmisión artificial.

20
Cuando el switch del modulador esta cerrado, la línea de transmisión descarga através del circuito serie formado por el switch del modulador y el primario deltransformador.La línea de transmisión artificial es un circuito abierto en su salida terminal,entonces cuando la onda de voltaje alcanza la salida de la línea es reflejada. Amedida que la onda reflejada se propaga hacia la entrada de la línea, estadescarga completamente cada sección de la línea. Cuando la onda reflejadaalcanza la entrada de la línea el pulso del modulador cesa abruptamente. Si eloscilador y el transformador de pulso están acoplados adecuadamente a laimpedancia de la línea, el pulso del voltaje que aparece en el primario deltransformador es igual a la mitad del voltaje al cual la línea fue cargadainicialmente.
Una red formadora de pulsos es similar a una línea de transmisión artificial en elalmacenamiento de energía entre pulsos y en que producen un pulso casirectangular, el arreglo de capacitores e inductores en la figura 14(B) aproxima elcomportamiento de una línea de transmisión artificial, cada capacitor en la línea detransmisión artificial, de la figura 14(A), debe soportar el voltaje alto requerido parael pulso modulador, a causa de que cada capacitor debe estar aislado de estevoltaje, una línea de transmisión artificial consistente de muchas secciones seríapesada y voluminosa.La red formadora de pulsos de la figura 14(B), puede soportar alto voltaje pero norequiere aislamiento voluminoso en todos sus capacitores, solo el capacitor enserie C1 debe tener aislamiento a alto voltaje. Debido a que los otros capacitoresestán en paralelo con sus correspondientes inductores, el pulso de voltaje delmodulador se divide casi igualmente entre ellos, así a excepción de C1, loselementos de la red formadora de pulsos son relativamente pequeños.Las redes formadoras de pulsos usualmente son aisladas sumergiendo cadaelemento en aceite. La red se encierra generalmente en una caja metálica en lacual se marca el ancho de pulso, la impedancia característica y el voltaje deoperación. Si uno de los elementos de la red falla se tiene que reemplazar toda lared.
Dispositivos de conmutación del modulador.El voltaje almacenado debe descargarse a través del dispositivo de conmutacióndel modulador. Este dispositivo conduce mientras dura el pulso modulador y es uncircuito abierto entre pulsos, por lo que el switch del modulador debe realizar lassiguientes funciones:
1. Cerrarse muy rápido y después alcanzar conducción plena en una pequeñafracción de microsegundo.
2. Conducir corrientes grandes (decenas o cientos de amperes) y soportaraltos voltajes (miles de voltios)
3. Dejar de conducir con la misma velocidad con que se comienza a conducir.4. Consumir solo una pequeña fracción de la potencia que pasa a través de él.
Estos requerimientos de conmutación y conducción son reunidos por elTHYRATRON (tiratrón), este dispositivo se mantiene en corte por un voltaje de
21
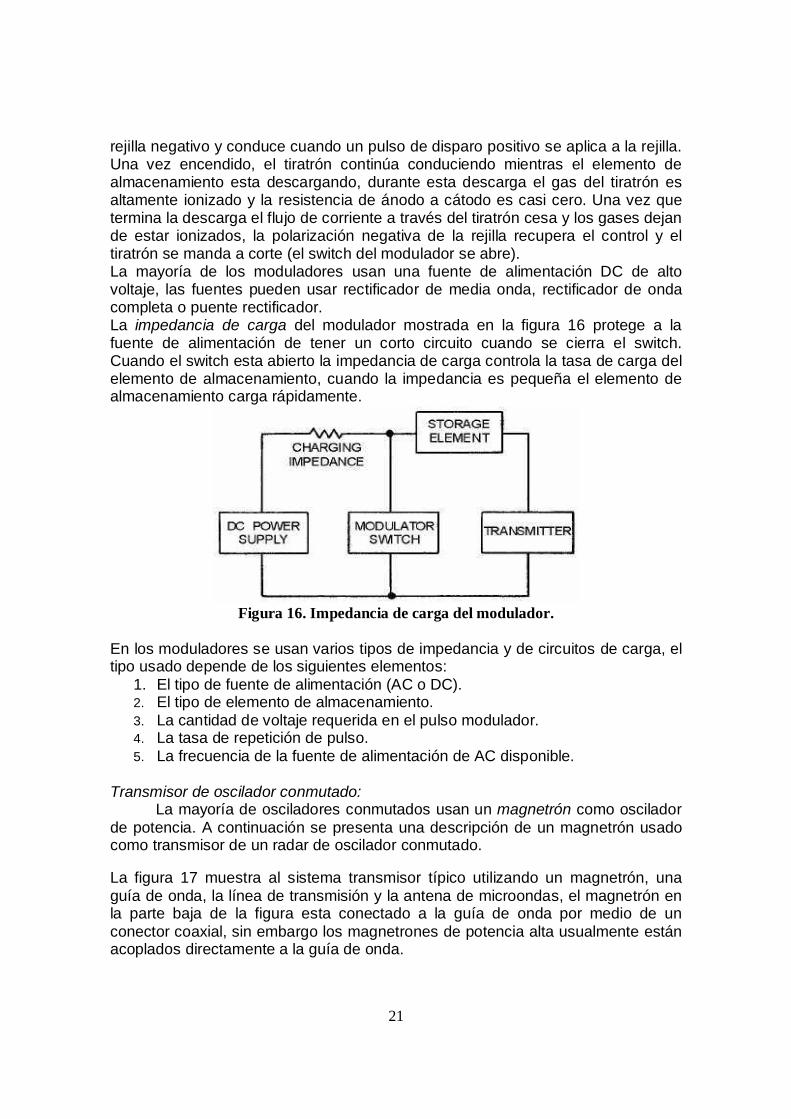
rejilla negativo y conduce cuando un pulso de disparo positivo se aplica a la rejilla.Una vez encendido, el tiratrón continúa conduciendo mientras el elemento dealmacenamiento esta descargando, durante esta descarga el gas del tiratrón esaltamente ionizado y la resistencia de ánodo a cátodo es casi cero. Una vez quetermina la descarga el flujo de corriente a través del tiratrón cesa y los gases dejande estar ionizados, la polarización negativa de la rejilla recupera el control y eltiratrón se manda a corte (el switch del modulador se abre).La mayoría de los moduladores usan una fuente de alimentación DC de altovoltaje, las fuentes pueden usar rectificador de media onda, rectificador de ondacompleta o puente rectificador.La impedancia de carga del modulador mostrada en la figura 16 protege a lafuente de alimentación de tener un corto circuito cuando se cierra el switch.Cuando el switch esta abierto la impedancia de carga controla la tasa de carga delelemento de almacenamiento, cuando la impedancia es pequeña el elemento dealmacenamiento carga rápidamente.
Figura 16. Impedancia de carga del modulador.
En los moduladores se usan varios tipos de impedancia y de circuitos de carga, eltipo usado depende de los siguientes elementos:
1. El tipo de fuente de alimentación (AC o DC).2. El tipo de elemento de almacenamiento.3. La cantidad de voltaje requerida en el pulso modulador.4. La tasa de repetición de pulso.5. La frecuencia de la fuente de alimentación de AC disponible.
Transmisor de oscilador conmutado: La mayoría de osciladores conmutados usan un magnetrón como osciladorde potencia. A continuación se presenta una descripción de un magnetrón usadocomo transmisor de un radar de oscilador conmutado.
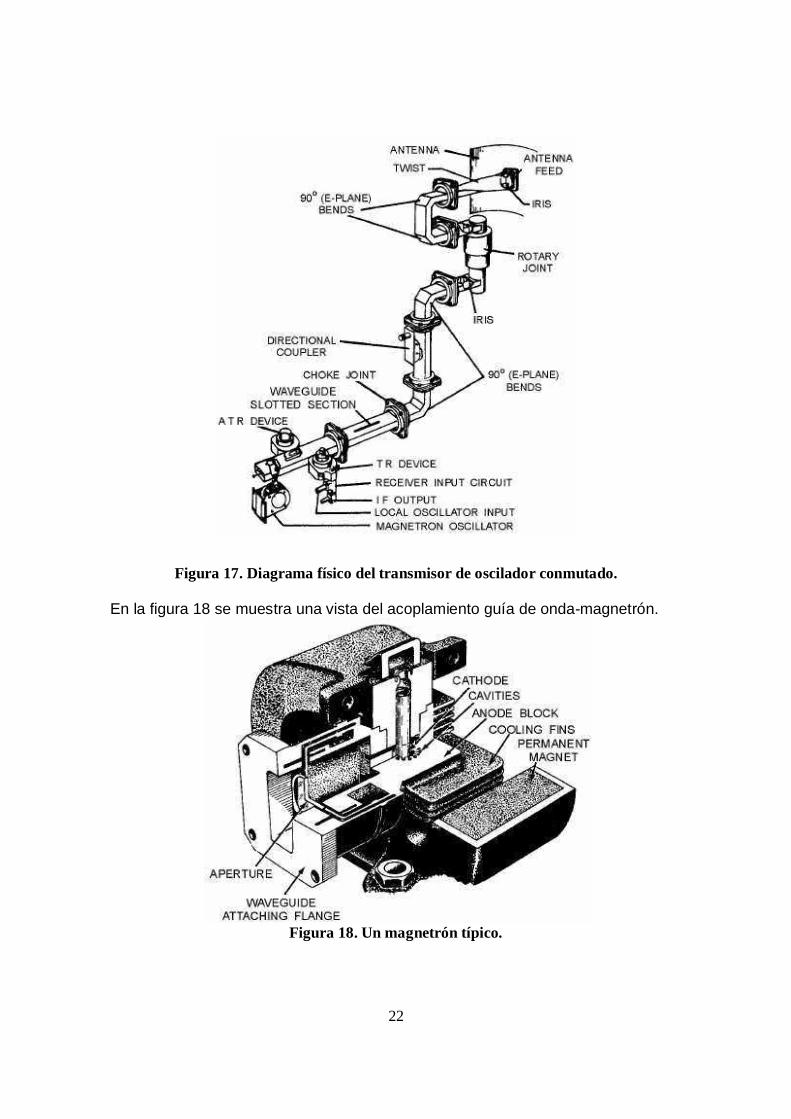
La figura 17 muestra al sistema transmisor típico utilizando un magnetrón, unaguía de onda, la línea de transmisión y la antena de microondas, el magnetrón enla parte baja de la figura esta conectado a la guía de onda por medio de unconector coaxial, sin embargo los magnetrones de potencia alta usualmente estánacoplados directamente a la guía de onda.
22
Figura 17. Diagrama físico del transmisor de oscilador conmutado.
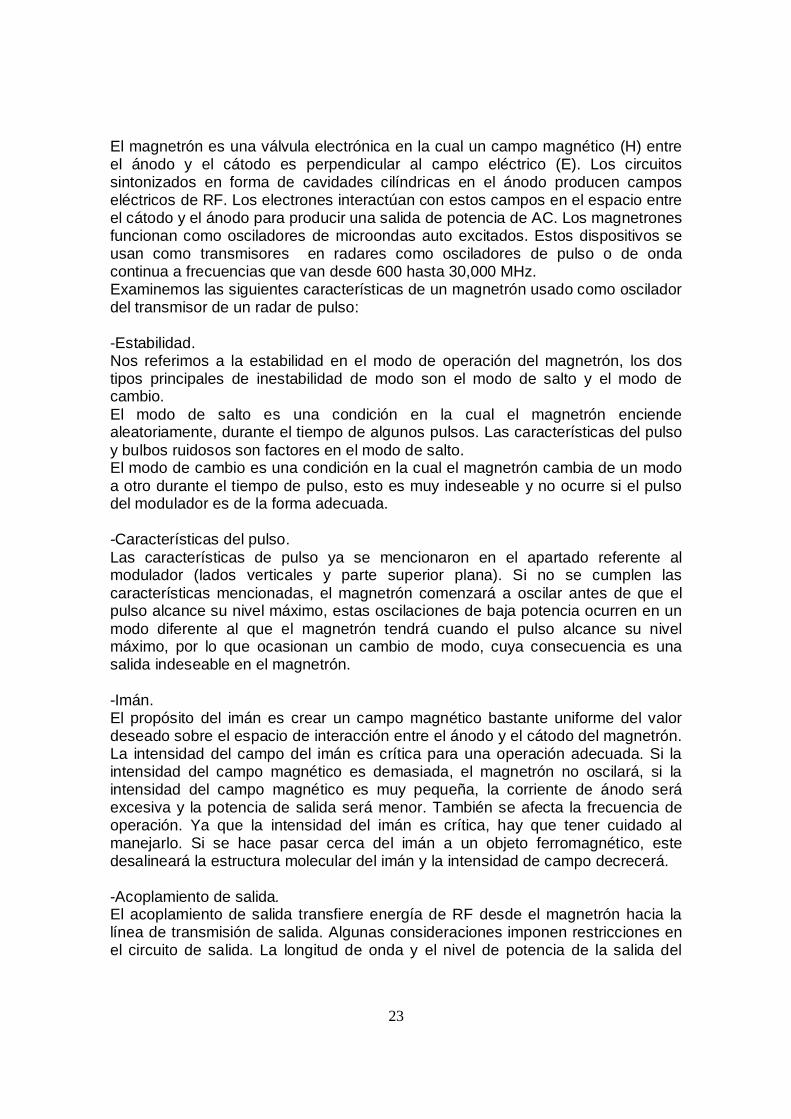
En la figura 18 se muestra una vista del acoplamiento guía de onda-magnetrón.
Figura 18. Un magnetrón típico.
23
El magnetrón es una válvula electrónica en la cual un campo magnético (H) entreel ánodo y el cátodo es perpendicular al campo eléctrico (E). Los circuitossintonizados en forma de cavidades cilíndricas en el ánodo producen camposeléctricos de RF. Los electrones interactúan con estos campos en el espacio entreel cátodo y el ánodo para producir una salida de potencia de AC. Los magnetronesfuncionan como osciladores de microondas auto excitados. Estos dispositivos seusan como transmisores en radares como osciladores de pulso o de ondacontinua a frecuencias que van desde 600 hasta 30,000 MHz.Examinemos las siguientes características de un magnetrón usado como osciladordel transmisor de un radar de pulso:
-Estabilidad.Nos referimos a la estabilidad en el modo de operación del magnetrón, los dostipos principales de inestabilidad de modo son el modo de salto y el modo decambio.El modo de salto es una condición en la cual el magnetrón enciendealeatoriamente, durante el tiempo de algunos pulsos. Las características del pulsoy bulbos ruidosos son factores en el modo de salto.El modo de cambio es una condición en la cual el magnetrón cambia de un modoa otro durante el tiempo de pulso, esto es muy indeseable y no ocurre si el pulsodel modulador es de la forma adecuada.
-Características del pulso.Las características de pulso ya se mencionaron en el apartado referente almodulador (lados verticales y parte superior plana). Si no se cumplen lascaracterísticas mencionadas, el magnetrón comenzará a oscilar antes de que elpulso alcance su nivel máximo, estas oscilaciones de baja potencia ocurren en unmodo diferente al que el magnetrón tendrá cuando el pulso alcance su nivelmáximo, por lo que ocasionan un cambio de modo, cuya consecuencia es unasalida indeseable en el magnetrón.
-Imán.El propósito del imán es crear un campo magnético bastante uniforme del valordeseado sobre el espacio de interacción entre el ánodo y el cátodo del magnetrón.La intensidad del campo del imán es crítica para una operación adecuada. Si laintensidad del campo magnético es demasiada, el magnetrón no oscilará, si laintensidad del campo magnético es muy pequeña, la corriente de ánodo seráexcesiva y la potencia de salida será menor. También se afecta la frecuencia deoperación. Ya que la intensidad del imán es crítica, hay que tener cuidado almanejarlo. Si se hace pasar cerca del imán a un objeto ferromagnético, estedesalineará la estructura molecular del imán y la intensidad de campo decrecerá.
-Acoplamiento de salida.El acoplamiento de salida transfiere energía de RF desde el magnetrón hacia lalínea de transmisión de salida. Algunas consideraciones imponen restricciones enel circuito de salida. La longitud de onda y el nivel de potencia de la salida del
24
magnetrón determinan si la línea de transmisión será una guía de onda o unalínea coaxial.El circuito de salida coaxial consiste de la longitud de la línea coaxial, el conductorcentral de la línea se dobla en forma de argolla y se inserta en una de lascavidades del magnetrón para el acoplamiento magnético. El lado de carga de lalínea de acoplamiento puede alimentar a una línea coaxial externa o a una guía deonda. Si la línea externa es coaxial, la conexión puede ser directa o por medio deuniones inductivas (choke joints). Si la línea externa es una guía de onda, elcircuito debe incluir una unión satisfactoria entre la línea coaxial y la guía de onda,uno de los tipos de unión muy usado es el acoplador de prueba. El acoplador deprueba actúa como una antena radiando dentro de la guía de onda.La salida de la guía de onda puede ser alimentada directamente por una abertura(ranura) en una de las cavidades del magnetrón, como se muestra en la figura 18.Esta abertura se debe cubrir con una ventana (iris) para mantener el vacío.Muchos de los magnetrones usados en los sistemas modernos de radar sonsintonizables en la frecuencia, típicamente un magnetrón sintonizable puede variar5% alrededor de su banda de frecuencia. Así la frecuencia del radar se puedevariar para obtener la operación óptima y evitar interferencia en una frecuenciaparticular.Las señales del modulador de miles de volts pico se aplican al cátodo delmagnetrón durante la operación. Estos altos voltajes requieren de la utilización depostes de vidrio largos, para aislar el cátodo y los filamentos del bloque del ánodo.
Transmisor de amplificador de potencia.Este tipo de transmisor se usa en muchos sistemas de radar recientes. Este tipode transmisor se desarrollo debido a la necesidad de una operación más establedel indicador de blancos móviles (MTI). En un transmisor de magnetrón, eloscilador tiende a variar en la frecuencia debido a los cambios de temperatura,cambios en el pulso modulante y otros efectos. Esta variación de frecuencia puedeser compensada usando un circuito de control automático de frecuencia (AFC),diseñado para controlar la frecuencia en el circuito receptor, sin embargo esto noelimina los efectos indeseables en el MTI.
La figura 19 muestra un diagrama a bloques de un transmisor de amplificador depotencia típico. En este transmisor un klistrón de cavidades múltiples amplifica lospulsos RF de potencia baja que se han generado y formado en otras etapas. Losamplificadores de campo cruzado (CROSS FIELD AMPLIFIERS: AMPLITRONS)se usan en sistemas de radar con una banda amplia de frecuencias transmitidasya que son estables sobre un rango de frecuencias más amplio.
25
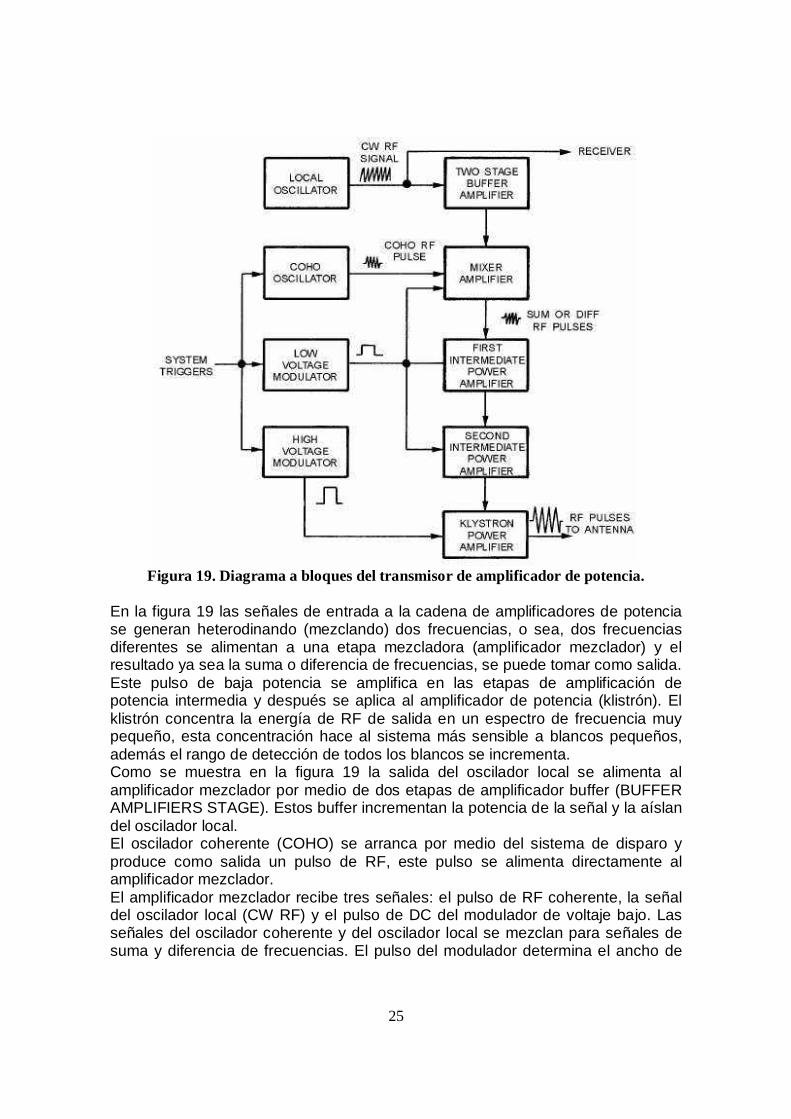
Figura 19. Diagrama a bloques del transmisor de amplificador de potencia.
En la figura 19 las señales de entrada a la cadena de amplificadores de potenciase generan heterodinando (mezclando) dos frecuencias, o sea, dos frecuenciasdiferentes se alimentan a una etapa mezcladora (amplificador mezclador) y elresultado ya sea la suma o diferencia de frecuencias, se puede tomar como salida.Este pulso de baja potencia se amplifica en las etapas de amplificación depotencia intermedia y después se aplica al amplificador de potencia (klistrón). Elklistrón concentra la energía de RF de salida en un espectro de frecuencia muypequeño, esta concentración hace al sistema más sensible a blancos pequeños,además el rango de detección de todos los blancos se incrementa.Como se muestra en la figura 19 la salida del oscilador local se alimenta alamplificador mezclador por medio de dos etapas de amplificador buffer (BUFFERAMPLIFIERS STAGE). Estos buffer incrementan la potencia de la señal y la aíslandel oscilador local.El oscilador coherente (COHO) se arranca por medio del sistema de disparo yproduce como salida un pulso de RF, este pulso se alimenta directamente alamplificador mezclador.El amplificador mezclador recibe tres señales: el pulso de RF coherente, la señaldel oscilador local (CW RF) y el pulso de DC del modulador de voltaje bajo. Lasseñales del oscilador coherente y del oscilador local se mezclan para señales desuma y diferencia de frecuencias. El pulso del modulador determina el ancho de
26
pulso y el nivel de potencia. La etapa mezcladora funciona mientras dura el pulsodel modulador.El amplificador mezclador alimenta los pulsos de RF a un amplificador de potenciaintermedia, este amplificador es similar al buffer, pero es un amplificador de pulso,es decir solo opera mientras el pulso del modulador es aplicado a la etapa. Laseñal de salida amplificada se alimenta a un segundo amplificador de potenciaintermedia que opera de la misma manera que el primero.La señal del segundo amplificador de potencia intermedia se alimenta alamplificador de klistrón, que utiliza un klistrón de cavidades múltiples. La señal deentrada de RF se utiliza como excitador de la primera cavidad. También se aplicanal amplificador de klistrón pulsos modulantes de alto voltaje, estos pulsos se hacenmás rectangulares por medio del transformador de pulso antes de aplicarse alklistrón. Todas las cavidades del klistrón son sintonizables y se sintonizan amanera de obtener el nivel de salida máximo a la frecuencia deseada.Hay que tomar previsiones para ajustar el tiempo de inicio de los pulsosmodulantes aplicados a manera de que todos ocurran al mismo tiempo.
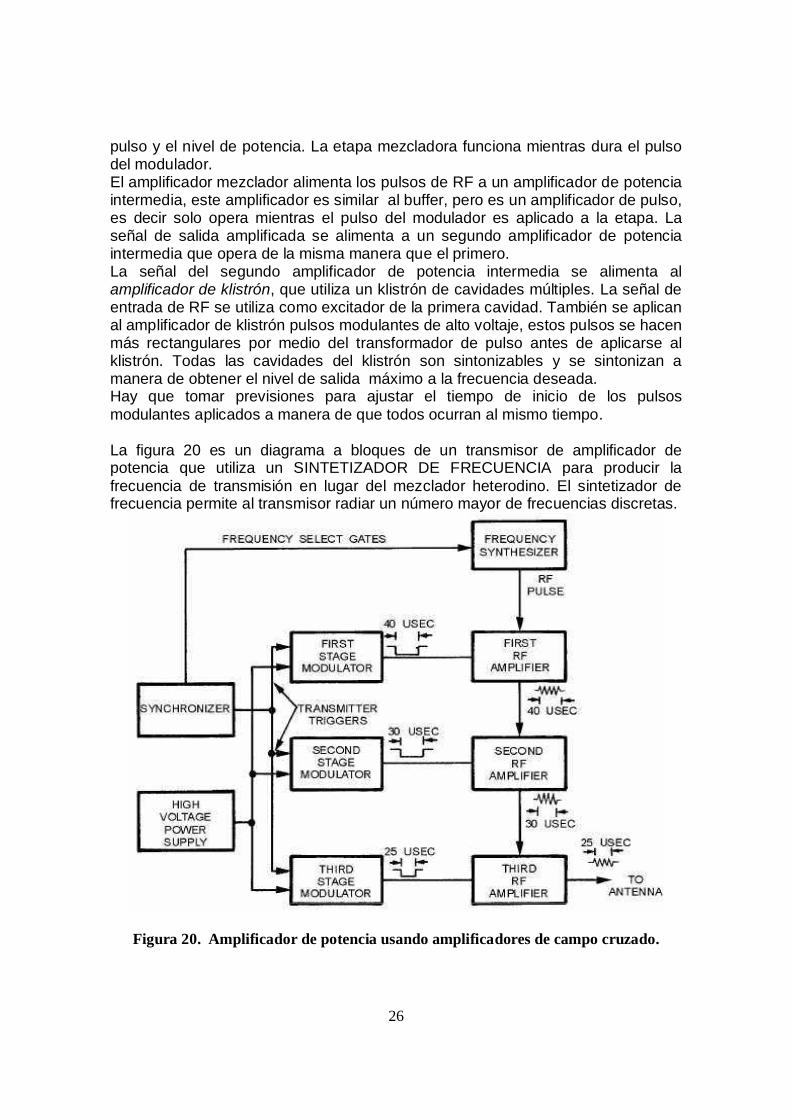
La figura 20 es un diagrama a bloques de un transmisor de amplificador depotencia que utiliza un SINTETIZADOR DE FRECUENCIA para producir lafrecuencia de transmisión en lugar del mezclador heterodino. El sintetizador defrecuencia permite al transmisor radiar un número mayor de frecuencias discretas.
Figura 20. Amplificador de potencia usando amplificadores de campo cruzado.

27
Un sintetizador de frecuencia típico consiste de un banco de osciladores queproducen frecuencias fijas pero diferentes. La salida de los osciladores fijos puedecombinarse para producir un rango más amplio de frecuencias. En sistemas conMTI la frecuencia seleccionada se combina con la frecuencia del osciladorcoherente para proveer una frecuencia estable para los circuitos MTI. Elsintetizador de frecuencia también produce las señales del oscilador local para elreceptor, ya que el pulso transmitido cambia de frecuencia en cada transmisión, laseñal del oscilador local del receptor debe de cambiar también y debe incluirse enla frecuencia transmitida. Un sistema de este tipo es programado en frecuenciapor compuertas de selección del sincronizador.En la figura 20 se observa como el primer amplificador de RF recibe los pulsos dela frecuencia seleccionada al mismo tiempo que el pulso modulador (delmodulador de la primera etapa). El pulso de RF usualmente es más ancho que elpulso modulador, para prevenir que el tubo del amplificador pulse cuando no hayenergía de RF presente. La salida del primer amplificador de RF es un pulsoamplificado del mismo ancho que el pulso modulador de la primera etapa. Lasegunda etapa del modulador se diseña para producir un pulso más angosto queel de la primera etapa, también para prevenir que el amplificador pulse sin señalRF. Así la segunda etapa del amplificador recibe un pulso modulador poco tiempodespués que la señal RF de la primera etapa llega a la entrada de la segundaetapa. El mismo procedimiento se repite en la etapa final.Los amplificadores de este tipo de transmisor tienen que ser amplificadores demicroondas de banda amplia los cuales amplifican la señal de entrada sindistorsión. Típicamente se usan tubos de onda viajera (traveling wave tubes, TWT)para la primera y la segunda etapa, y un amplificador de campo cruzado para laetapa final.
DUPLICADOR: Un duplicador es esencialmente un switch que permite a un sistema deradar usar una sola antena para transmitir y recibir. El duplicador debe conectar laantena al transmisor y desconectar la antena del receptor durante la transmisiónde un pulso. El receptor debe estar completamente aislado del pulso transmitidopara evitar algún daño en los circuitos extremadamente sensibles de la entrada delreceptor.Después de que ha terminado el pulso transmitido, el duplicador debe desconectarrápidamente el transmisor y conectar el receptor a la antena. El tiempo deconmutación entre transmisión y recepción es llamado tiempo de recuperación delreceptor, y debe ser muy rápido si se quieren detectar blancos cercanos. Ademásel duplicador debe absorber muy poca potencia durante cada fase de operación.Las características de baja pérdida son particularmente importantes durante elperiodo de recepción en la operación del duplicador, esto se debe a que lasseñales recibidas son de amplitud muy pequeña.Así un duplicador de radar es el equivalente en microondas de un switch de unpolo dos tiros rápido y de baja pérdida. Los dispositivos diseñados para estepropósito son similares a las bandas de chispas (spark gaps) en las cualesdescargas de microondas de corriente alta proporcionan trayectorias de bajaimpedancia.

28
Un duplicador usualmente contiene dos válvulas de conmutación (bandas dechispas) conectadas en un circuito de microondas con tres líneas de transmisiónterminales, una para el transmisor, una para el receptor y una para la antena.Estos circuitos pueden conectarse en paralelo o en serie como se muestra en lasvistas (A) y (B) de la figura 21. A una válvula se le llama de transmisión-recepción(Transmit-Receiver tube, TR) y a la otra se el llama de antitransmisión-recepción(Antitransmit-Receive Tube, ATR). La TR tiene la función de desconectar elreceptor, y la ATR de desconectar el transmisor.
Figura 21. Sistemas duplicadores.
La acción resultante de los circuitos TR y ATR depende de la impedanciacaracterística de la sección de un cuarto de longitud de onda (λ/4) de la línea detransmisión. A un cuarto de la longitud de onda o un múltiplo impar del cuarto, lalínea de transmisión presenta valores opuestos de impedancia en los extremos; unextremo de la línea aparece como un corto circuito y el otro como un circuitoabierto.

29
SISTEMA DE ANTENA: El sistema de antena dirige el pulso proveniente del transmisor, lo irradia enun haz muy direccional, recupera el eco de retorno y lo pasa al receptor con unaperdida mínima. El sistema de antena incluye a la antena, a las líneas detransmisión y guías de onda desde el transmisor hacia la antena; y la línea detransmisión y guía de onda desde la antena hacia el receptor. En algunaspublicaciones el duplicador se incluye como componente del sistema de antena.
RECEPTOR: El receptor acepta las señales de eco débiles provenientes del sistema deantena, las amplifica, detecta la envolvente del pulso, amplifica los pulsos, y losdirige al indicador. Una de las funciones primordiales del receptor de radar esconvertir la frecuencia de la señal recibida a una frecuencia menor que es fácil deamplificar, esto se debe a que la frecuencia del radar es muy alta y difícil deamplificar. La frecuencia menor es llamada frecuencia intermedia (IF). El tipo dereceptor que usa esta conversión de frecuencia es llamado RECEPTORSUPERHETERODINO. Los receptores superheterodinos usados en los sistemasde radar deben ser muy estables y extremadamente sensibles. La estabilidad seasegura con un diseño cuidadoso y la sensitividad resultante se incrementaconsiderablemente mediante el uso de muchas etapas de IF.
INDICADOR: El indicador usa las señales recibidas enviadas desde el receptor paraproducir una indicación visual de la información del blanco. El osciloscopio derayos catódicos es un instrumento ideal para la presentación de los datos delradar, esto se debe a que no solo muestra una variación en una sola cantidad,como el voltaje, sino también nos da una indicación de los valores relativos de doso más cantidades. La frecuencia de barrido del indicador del radar se determinamediante la frecuencia de repetición de pulso del sistema. Ya que el indicador esmuy similar a un osciloscopio, el término RADAROSCOPIO se usa comúnmentecuando se hace referencia a los indicadores de radar.
30
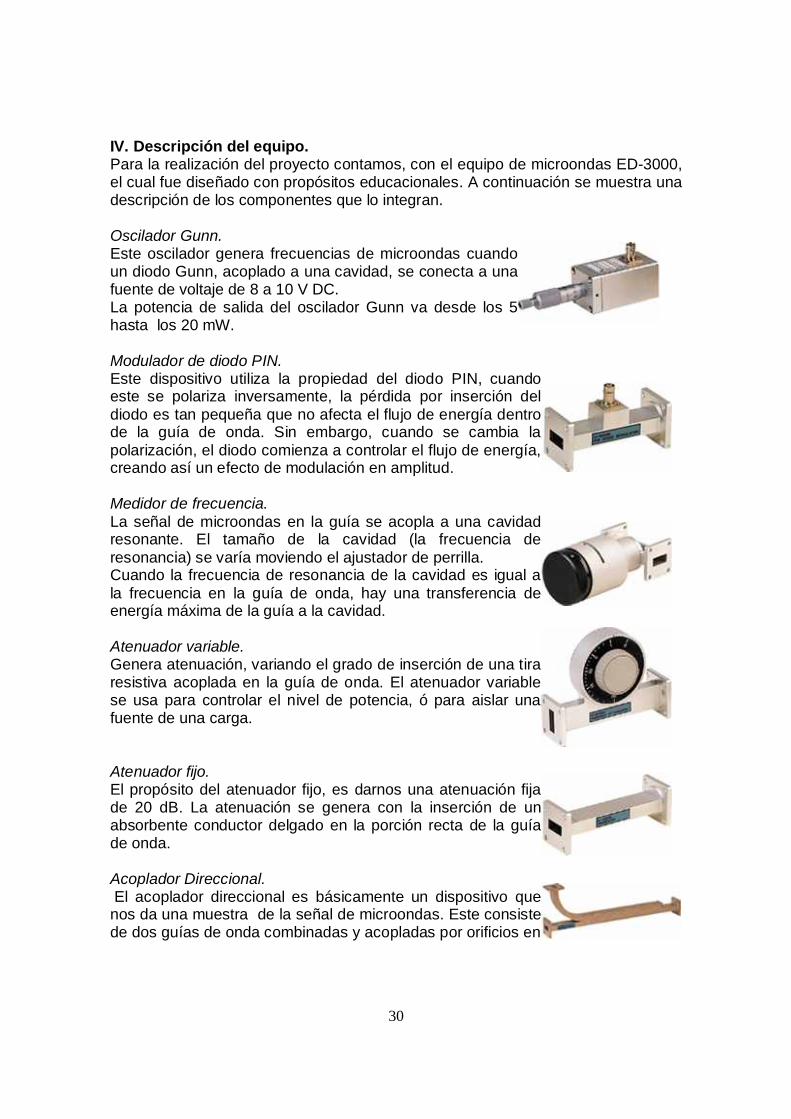
IV. Descripción del equipo.Para la realización del proyecto contamos, con el equipo de microondas ED-3000,el cual fue diseñado con propósitos educacionales. A continuación se muestra unadescripción de los componentes que lo integran.
Oscilador Gunn.Este oscilador genera frecuencias de microondas cuandoun diodo Gunn, acoplado a una cavidad, se conecta a unafuente de voltaje de 8 a 10 V DC.La potencia de salida del oscilador Gunn va desde los 5hasta los 20 mW.
Modulador de diodo PIN.Este dispositivo utiliza la propiedad del diodo PIN, cuandoeste se polariza inversamente, la pérdida por inserción deldiodo es tan pequeña que no afecta el flujo de energía dentrode la guía de onda. Sin embargo, cuando se cambia lapolarización, el diodo comienza a controlar el flujo de energía,creando así un efecto de modulación en amplitud.
Medidor de frecuencia.La señal de microondas en la guía se acopla a una cavidadresonante. El tamaño de la cavidad (la frecuencia deresonancia) se varía moviendo el ajustador de perrilla.Cuando la frecuencia de resonancia de la cavidad es igual ala frecuencia en la guía de onda, hay una transferencia deenergía máxima de la guía a la cavidad.
Atenuador variable.Genera atenuación, variando el grado de inserción de una tiraresistiva acoplada en la guía de onda. El atenuador variablese usa para controlar el nivel de potencia, ó para aislar unafuente de una carga.
Atenuador fijo.El propósito del atenuador fijo, es darnos una atenuación fijade 20 dB. La atenuación se genera con la inserción de unabsorbente conductor delgado en la porción recta de la guíade onda.
Acoplador Direccional. El acoplador direccional es básicamente un dispositivo quenos da una muestra de la señal de microondas. Este consistede dos guías de onda combinadas y acopladas por orificios en

31
la sección que las une. La directividad, es una figura de mérito del acopladordireccional, es una medida de que tan bien puede acoplarse la potencia en ladirección deseada.
Línea ranurada.Se usa para medir la amplitud y la fase del patrón de ondaestacionaria, este patrón nos permite determinar la longitud deonda, la razón de onda estacionaria y la impedancia de la líneade transmisión.
Sintonizador de tornillo deslizante.Su uso principal, es acoplar cargas, detectores ó antenas a laimpedancia característica de la guía de onda. Su estructuramecánica consiste en una punta de prueba que se desliza através de una ranura delgada en la guía de onda, por medio delmicrómetro. La combinación de la profundidad y posición de lapunta de prueba causa reflexión en la guía de onda a unaamplitud y fase especificas.
Detector de cristal.Esta localizado dentro de las paredes de la guía de onda, unido aun conector coaxial. Es básicamente un diodo ensamblado elcual responde al campo electromagnético dentro de la guía deonda. El diodo está constituido por una pieza pequeña de silicio yun cable delgado de tungsteno, cuando un voltaje se aplica através del diodo, de tal forma que fuerce a los electrones a salirdel silicio y entrar al tungsteno, se genera una corriente.
Terminador acoplado.Es esencialmente una carga acoplada a una línea de transmisiónEl terminador acoplado se usa para minimizar la razón de ondaestacionaria en un sistema.
T-mágica (ó T-híbrida). Una T-mágica es un dispositivo de cuatro puertos, que esbásicamente una versión en microondas de la bobina híbridausada en los circuitos repetidores de telefonía. Esta tiene lapropiedad de que la potencia incidente en uno de los brazos, sedivide a la mitad en los dos brazos adyacentes, pero no haypotencia en el brazo opuesto.
32
V. Desarrollo experimental.La intención primaria era desarrollar un radar de pulso, que determinara ladistancia a la que se encuentre un objeto. Como ya se explicó en el marco teórico,las partes funcionales de este tipo de radar son: sincronizador, transmisor (queincluye el modulador), duplicador, la antena, el receptor y el indicador.Para poder implementar el modulador, necesitamos de un dispositivo deconmutación que trabaje a frecuencias de microondas, comúnmente se usa eltiratrón.En el equipo con el que contamos para la realización del proyecto, no contamoscon ningún dispositivo que reúna estas características, por lo tanto con el materialque tenemos, no podemos crear pulsos de RF, por lo que no se puedeimplementar un radar de pulso.Para poder usar una sola antena para transmisión y recepción necesitamos delduplicador, el cual desconecta la antena del receptor cuando se transmite ydesconecta la antena del transmisor cuando se recibe. Esto se lleva a cabo condos válvulas, una de transmisión-recepción (TR) y otra de antitransmisión-recepción (ATR), tampoco contamos con estos dispositivos en el equipo quetenemos, por lo que tendremos que usar dos antenas una para transmisión y otrapara recepción.Al no tener como modular la oscilación RF, no podemos crear pulsos por lo quetendremos que usar onda continua (CW).El paradigma que enfrentamos nos obliga a preguntar ¿Qué podemosimplementar con el equipo que tenemos?Entre las aplicaciones de radar que trabajan con onda continua, encontramos elradar de efecto doppler que describimos a continuación.
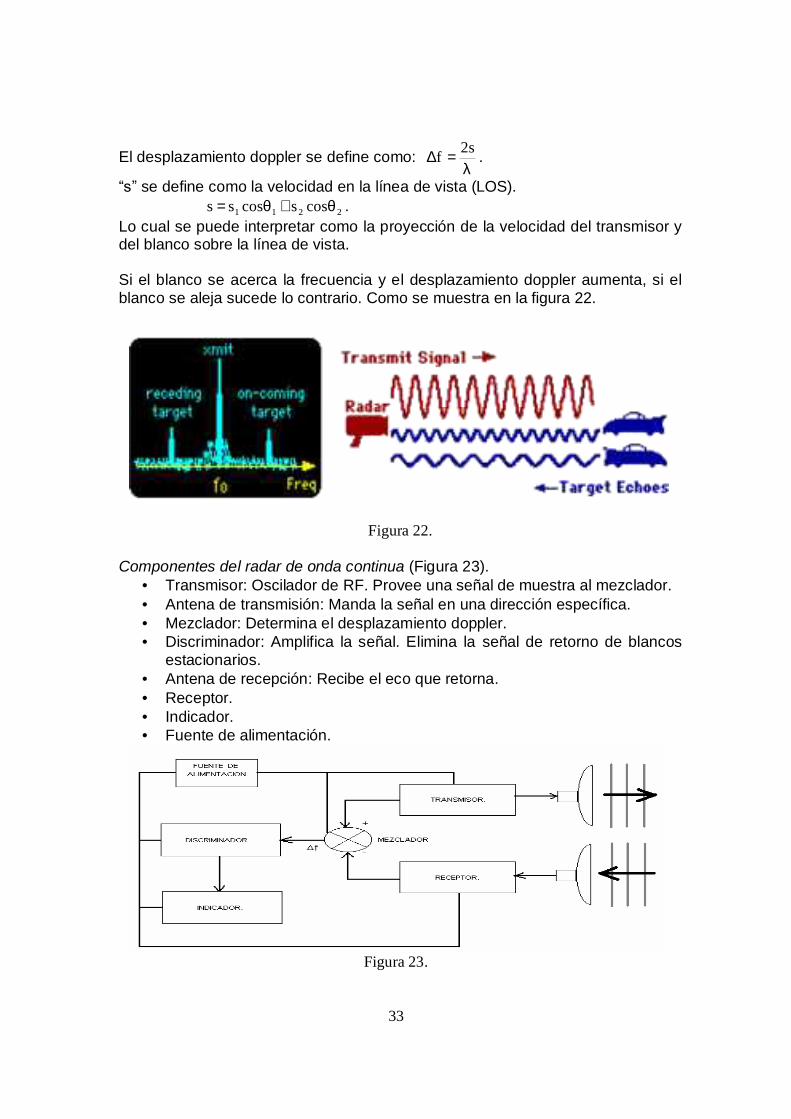
Radar de onda continua (CW RADAR).Los radares de onda continua emiten radiación electromagnética todo el tiempo. Elradar CW convencional no puede medir el rango por que no hay una base paramedir el retardo en el tiempo. Hay que recordar que el sistema básico de radarenvía pulsos y usa el intervalo de tiempo entre la transmisión y la recepción paradeterminar el rango del blanco, si la energía es transmitida continuamente, esto noes posible.Los radares CW pueden medir la razón de cambio instantánea en el rango delblanco (velocidad). El desplazamiento doppler es un cambio en la frecuencia de laonda electromagnética causada por el movimiento del transmisor, del blanco o deambos.
Características.• Ciclo de trabajo = 1 (Siempre está transmitiendo).• Ppico=Pprom.• Alta SNR.• Rmin=0.• Usa dos antenas (Una para transmitir y una para recibir).• Debe haber movimiento relativo.• Mide el desplazamiento Doppler.
33
El desplazamiento doppler se define como:λ2sf =∆ .
se define como la velocidad en la línea de vista (LOS).2211 cosscosss θθ += .
Lo cual se puede interpretar como la proyección de la velocidad del transmisor ydel blanco sobre la línea de vista.
Si el blanco se acerca la frecuencia y el desplazamiento doppler aumenta, si elblanco se aleja sucede lo contrario. Como se muestra en la figura 22.
Figura 22.
Componentes del radar de onda continua (Figura 23).• Transmisor: Oscilador de RF. Provee una señal de muestra al mezclador.• Antena de transmisión: Manda la señal en una dirección específica.• Mezclador: Determina el desplazamiento doppler.• Discriminador: Amplifica la señal. Elimina la señal de retorno de blancos
estacionarios.• Antena de recepción: Recibe el eco que retorna.• Receptor.• Indicador.• Fuente de alimentación.
Figura 23.

34
Al observar el diagrama a bloques de la figura 23, notamos que se necesitan dosantenas, esto no nos causa ningún problema, ya que el ED-3000 incluye dosantenas de corneta.La fuente de alimentación también se incluye en el ED-3000.El transmisor se implementa usando el oscilador Gunn, como deseamos trabajaren banda X, lo ajustamos para que la frecuencia de oscilación sea de 10 GHz.Necesitamos proveer una muestra de la señal del transmisor para el mezclador,esto se consigue utilizando el acoplador direccional.El mezclador debe ser capaz de obtener la resta de la señal transmitida menos laseñal recibida, el único dispositivo del ED-3000 que reúne estas características esla T-híbrida, en el siguiente apartado describimos su funcionamiento desde elenfoque de una red de 4 puertos, con una matriz de dispersión asociada.
En el diagrama a bloques de la figura 23 se observa que las antenas se colocanuna encima de la otra en planos paralelos. De las características físicas delacoplador direccional incluido en ED-3000, sabemos que las guías de onda que loconforman forman un ángulo recto entre ellas, si las antenas están en planosparalelos necesitamos que una vez que la señal detectada entre por la antena derecepción gire 90° a fin de que las guías de onda coincidan en la T-mágica que seusa como mezclador la cual denotamos como TM. Este giro lo conseguimosutilizando otra T-híbrida, auxiliar, la cual denotamos como TA.Por lo tanto al recibirse la señal de eco esta pasará a la rama 3 de la TA y saldrápor la rama 4, obteniéndose el giro de 90°. Las ramas 1 y 2 de la TA no se utilizanpor lo que les conectamos un terminador acoplado a cada una, nótese que aunquetomamos la salida por la rama 4 de TA, es la misma señal que entra por la rama 3de TA, ya que no entra nada por la rama 2 y no se produce la resta de señales.
Necesitamos la diferencia entre la señal de RF transmitida y recibida, por lo tantohacemos coincidir la salida de TA, que es la rama 4, con la rama 3 de TM, quefunciona como entrada, la muestra de la señal transmitida que se obtiene delacoplador direccional se hace coincidir con la rama 2 de TM, que también funcionacomo entrada, la diferencia de señales se obtiene en la rama 4 de TM. En la rama1 de TM se obtiene la suma de señales pero como ésta no la ocupamos, leconectamos un terminador acoplado.En la rama 4 de TM, conectamos el detector de cristal, a fin de convertir la energíade RF, para poder observar la señal de salida en el indicador, el cual seimplementa por medio de un osciloscopio.
35
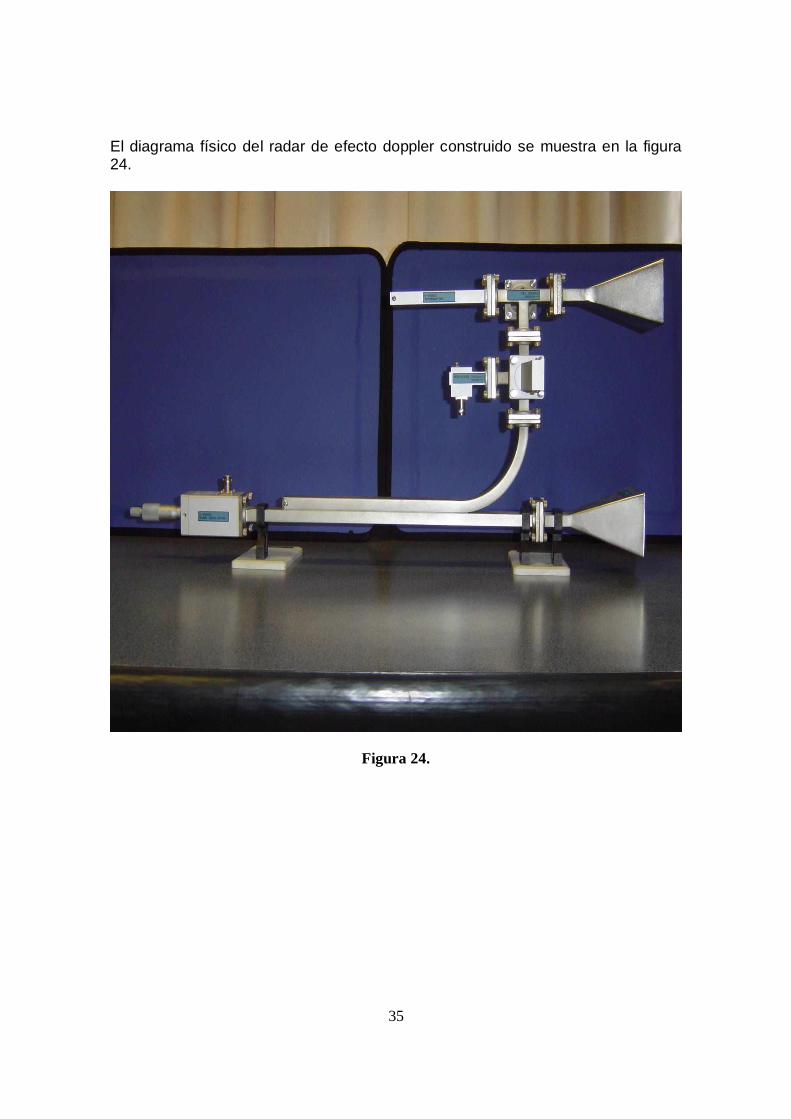
El diagrama físico del radar de efecto doppler construido se muestra en la figura24.
Figura 24.
36
VI. Cálculo.Cuando es necesario conocer la distribución de los campos longitudinales ytransversales en una guía de onda las deducciones para la potencia y laimpedancia resultan elaboradas y difíciles de evaluar. A fin de evitar este proceso,se desarrolla la teoría de puertos, donde se considera que un sistema demicroondas puede representarse como una red de N-puertos de entrada y salida,en donde a cada puerto se le relaciona con un coeficiente de dispersión.
La representación en forma de red es posible si se siguen las siguientes reglas:1. El voltaje se define como proporcional al campo eléctrico transversal del
modo de propagación y la corriente se define como proporcional al campomagnético transversal.
2. Una condición en los factores de proporcionalidad es que la potenciapromedio esta dada por ( )[ ]2/Re IV como en un circuito.
3. La segunda condición en los factores de proporcionalidad es que la razónV / I de una onda incidente debe ser una impedancia característica delmodo en cuestión, frecuentemente tomada como la unidad para normalizarautomáticamente todas las impedancias.
A través de los coeficientes de dispersión, se determinan la tensión la corriente yla impedancia de los sistemas de estudio.
En algunos casos es más conveniente definir las propiedades de transformaciónde la red en términos de ondas, que en términos de voltajes, corrientes eimpedancias. Las dos cantidades independientes requeridas para cada guía deonda son una onda incidente y una onda reflejada reemplazando el voltaje y lacorriente.
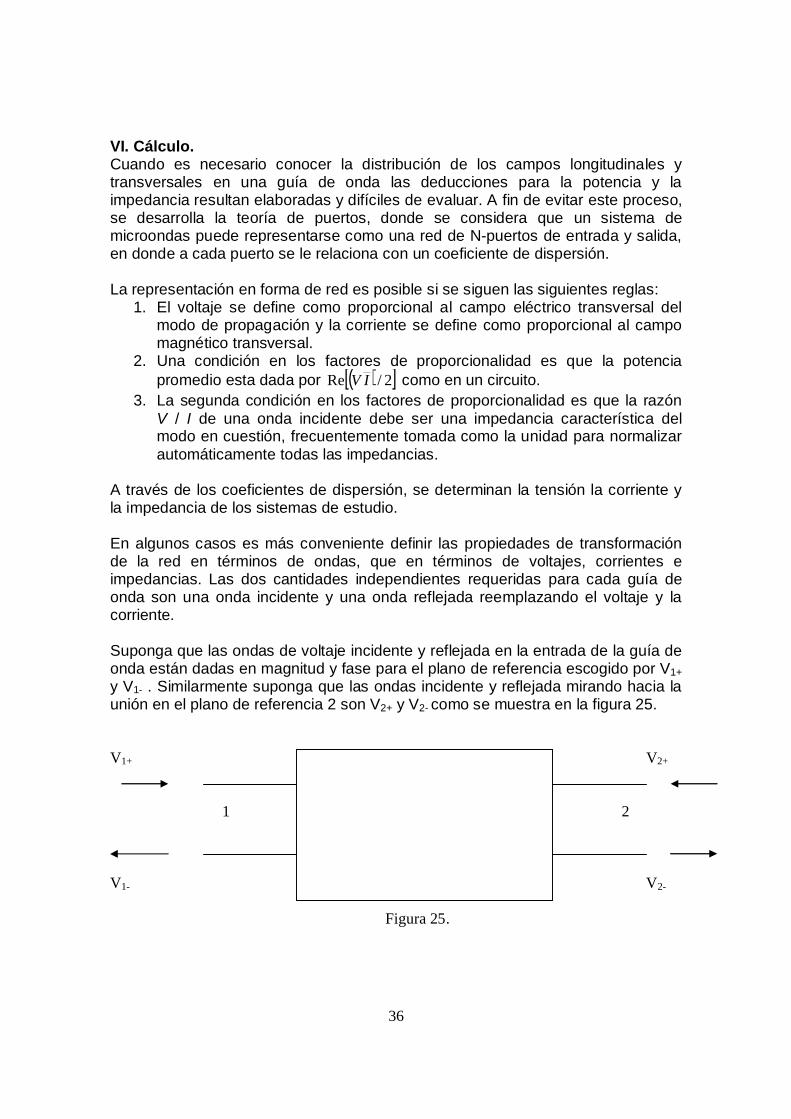
Suponga que las ondas de voltaje incidente y reflejada en la entrada de la guía deonda están dadas en magnitud y fase para el plano de referencia escogido por V1+y V1- . Similarmente suponga que las ondas incidente y reflejada mirando hacia launión en el plano de referencia 2 son V2+ y V2- como se muestra en la figura 25.
V1+ V2+
1 2
V1- V2-
Figura 25.

37
Comúnmente se normalizan las ondas incidente y reflejada como sigue:
n
nn Z
Va0
+= ...............(1) n
nn Z
Vb0
−= .......................(2)
Entonces el voltaje y la corriente en el plano de referencia n, están relacionadoscomo sigue:
Vn = Vn+ + Vn- = ( )nnn baZ +0 ...........................(3)
In= ( )−+ − nnn
VVZ 0
1 = ( )nnn
baZ
−0
1 ....................(4)
La potencia promedio fluyendo en la terminal n es:
Pav = ½ Re [ ]nnIV
Sustituyendo (3) y (4) en la ecuación anterior tenemos:
Pav = ½ ( ) ( )[ ]nnnn bbaa **Re −
Podemos relacionar las dos ondas reflejadas con las dos ondas incidentes comosigue:
=
2
1
2221
1211
2
1
aa
SSSS
bb
ó
[b] = [S][a]......................................(5)
con el arreglo [S] conocido como la matriz de dispersión y los coeficientes s11 ydemás conocidos como los coeficientes de dispersión. Para una interpretaciónfísica, note que con la fuente aplicada al puerto1 y con la guía de onda de salidaacoplada, implica que a2=0.
b1 = s11a1 b2 = s21a1
Así s11 es el coeficiente de reflexión de entrada (en magnitud y fase) cuando lasalida esta acoplada. s21 es la razón de las ondas a la derecha de la salida y laentrada bajo esta condición.

38
La ecuación de la potencia promedio para este caso es:
P1av = ½ ( )[ ]1111111 aaSS−
P2av = ½ ( )[ ]112121 aaSS−
Para una red pasiva con la fuente en el plano 1 como en el ejemplo, la potencia desalida no puede ser mayor que la de entrada. Entonces P2av P1av ó
( ) ( )11112121 1 SSSS −≤
Formulación de la red de N puertos.Los coeficientes de dispersión, definidos en la sección anterior para 2 puertospueden extenderse a N puertos como sigue:
De la ecuación (5) sabemos que: [b] = [S] [a]El vector [b] representa las N ondas que abandonan la unión, y el vector [a]representa las N ondas que inciden en la unión, para que se cumpla la regla demultiplicación de matrices, la matriz S debe ser de NxN.
A continuación se consideran algunas especializaciones de la formulación generalde N puertos:
Redes recíprocas:Para la mayoría de los sistemas las matrices de dispersión, inductancia yadmitancia son simétricas. Esto es:
Sji = Sij , Zji = Zij , Yji = Yij .
Esta condición proviene de un teorema de reciprocidad debido a Lorentz, el cualdice que los campos Ea, Ha y Eb, Hb de dos fuentes diferentes a la mismafrecuencia satisfacen la condición:
( ) 0=×−ו∇ abba HEHE
Redes libres de pérdidas:En muchas uniones (nodos) de las redes de microondas se consideran pérdidasdespreciables, observemos las consecuencias de no considerar pérdidas.Aplicando el teorema de Poynting en forma compleja al flujo de potencia de la redde N puertos tenemos:
( ) ( ) ( )EHL
N
rr UUjWr
IVdSHE −+==
=•×− ∑∫ 421
ω ..........................(6)

39
Donde:WL.- Es la potencia disipada en la red (pérdidas).UH.- Es la energía promedio en el campo magnético de la red.UE.- Es la energía promedio en el campo eléctrico de la red.
Sustituyendo las ecuaciones (3) y (4) en la ecuación (6) tenemos:
( )( ) ( )EHL
N
rrrrr
N
rrr UUjWbabaIV −+=−+=∑∑
==
4211
ω
( ) ( )EHL
N
rrrrrrrrr UUjWbababbaa −+=+−−∑
=
421
ω
Dado que para una red libre de pérdidas WL = 0, y como los productos rraa y rrbbson reales tenemos:
( ) 01
=−∑=
N
rrrrr bbaa , entonces
∑∑==
=N
rrr
N
rrr bbaa
11..................................(7)
Si escribimos la ecuación (7) en forma matricial tenemos:
[b]t[b* ] = [a]t[a* ]..................................(8)
Donde: [b]t es la transpuesta de [b] y [b* ] es el complejo conjugado de [b].
Ahora sustituyendo la ecuación (5) en la ecuación (8) tenemos:
( [S] [a] )t ( [S] [a] )* = [a]t [a* ]
La transpuesta de un producto es el producto de las transpuestas en ordeninverso, entonces:
[a]t [S]t [S* ] [a* ] = [a]t [U] [a* ]
Donde: [U] es la matriz identidad. Por lo que:
[S]t [S* ] = [U]...................................(9)
40
Las matrices en las cuales la transpuesta es el conjugado de la matriz inversa sonllamadas matrices unitarias. El uso de la regla del producto para matrices nosmuestra que ellas tienen las siguientes propiedades:
11
∑=
=N
n
inin SS .......................................(10)
jiSSN
njnin ≠=∑
=
,01
.......................(11)
A través de las condiciones de las ecuaciones (10) y (11) se determinan todos loscoeficientes que forman la matriz del sistema. Estos coeficientes siempre se dejanexpresados en función de los coeficientes de la diagonal que son los coeficientesde reflexión de cada puerto que se tiene en consideración.
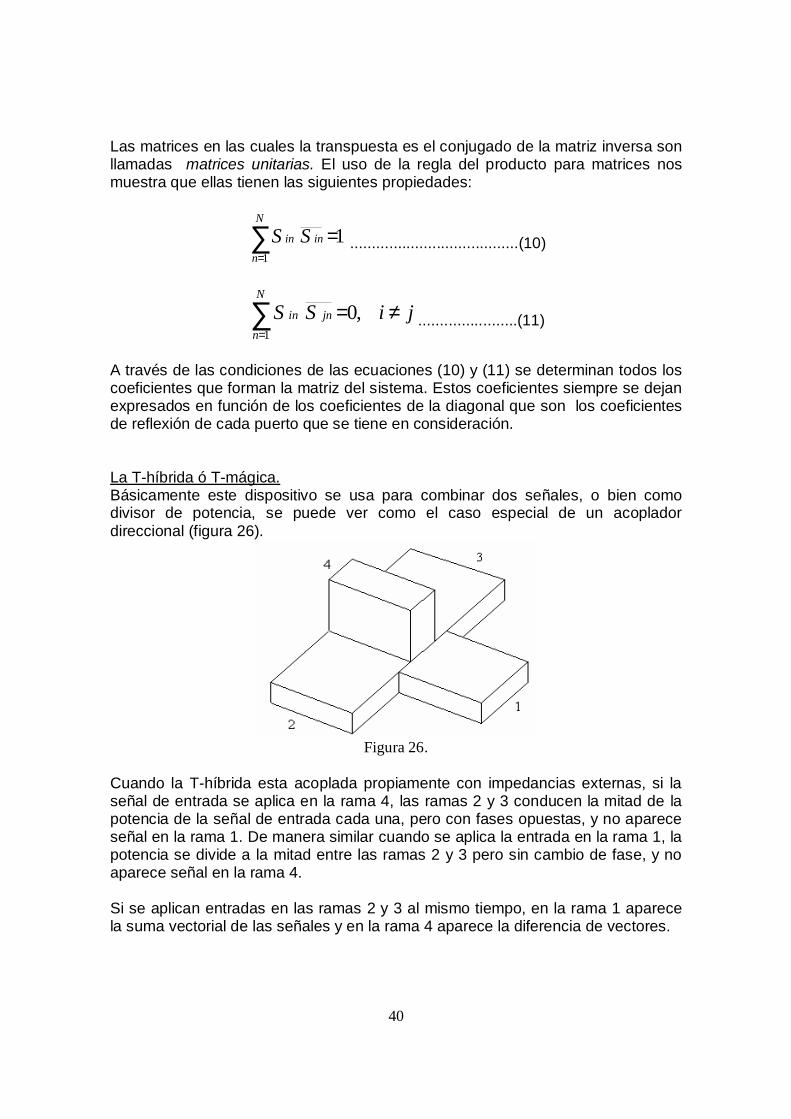
La T-híbrida ó T-mágica.Básicamente este dispositivo se usa para combinar dos señales, o bien comodivisor de potencia, se puede ver como el caso especial de un acopladordireccional (figura 26).
Figura 26.
Cuando la T-híbrida esta acoplada propiamente con impedancias externas, si laseñal de entrada se aplica en la rama 4, las ramas 2 y 3 conducen la mitad de lapotencia de la señal de entrada cada una, pero con fases opuestas, y no apareceseñal en la rama 1. De manera similar cuando se aplica la entrada en la rama 1, lapotencia se divide a la mitad entre las ramas 2 y 3 pero sin cambio de fase, y noaparece señal en la rama 4.
Si se aplican entradas en las ramas 2 y 3 al mismo tiempo, en la rama 1 aparecela suma vectorial de las señales y en la rama 4 aparece la diferencia de vectores.

41
Para estudiar las propiedades de la T-híbrida hay que utilizar la matriz dedispersión.Se desea que las ramas 1 y 4 no estén acopladas entonces: S14 = S41 = 0.La T-híbrida ideal debe estar acoplada de tal manera que toda la potencia queentra por la rama 1 se divida en partes iguales en las ramas 2 y 3, sin dejarreflexiones a la entrada, entonces: S11 = S44 = 0.
De la misma manera cuando tenemos entradas simultaneas en las ramas 2 y 3deseamos que toda la potencia de las señales se sume en la rama 1, sinreflexiones en la entrada y sin transmisiones entre las ramas 2 y 3 por lo tanto: S22 = S33 = 0, y S23 = S32 = 0.
Se asume que la red satisface la reciprocidad, entonces: S12 = S21, S13 = S31, S24 = S42, y S34 = S43.
Así la matriz de dispersión para una T-híbrida queda dada por:
[ ]
=
000000
00
3424
3413
2412
1312
SSSSSS
SS
S
Para redes con pérdidas despreciables la conservación de la potencia nos lleva ala condición de la ecuación (10).
11
∑=
=N
n
inin SS
Para i = 1: S12S12* + S13S13
* = 1........................(12) i = 2: S12S12
* + S24S24* = 1........................(13)
i = 3: S13S13* + S34S34
* = 1........................(14) i = 4: S24S24
* + S34S34* = 1........................(15)
La comparación de las ecuaciones (12) y (13) nos muestra que: |S13| = |S24|.La comparación de las ecuaciones (12) y (14) nos muestra que: |S12| = |S34|.
Si se seleccionan las referencias a manera que S13 y S24 sean reales y positivastenemos: S13 = S24......................................(16)

42
Ahora si aplicamos la ecuación (11) a la matriz de la T-híbrida tenemos:
jiSSN
njnin ≠=∑
=
,01
.
i = 1, j = 4: S12S24* + S13S34
* = 0.....................(17)i = 2, j = 3: S12S13
* + S24S34* = 0.....................(18)
Aplicando la ecuación (16) en la ecuación (17) tenemos: S12S13 + S13S34
* = 0.Por lo tanto tenemos: S12 = -S34
*.
Sabemos que en la T-híbrida la potencia se divide a la mitad en las ramas 2 y 3,con la misma fase cuando la entrada se aplica a la rama1, entonces: S12 = S13.
Cuando la entrada se aplica a la rama 4 la potencia se divide a la mitad en lasramas 2 y 3 con fases opuestas por lo que: S24 = -S34 ó S34 = -S24.
Por lo tanto la matriz de dispersión queda dada como:
[ ]
−−
=
000000
00
2424
2412
2412
1212
SSSS
SSSS
S
Aplicando la ecuación (10) al renglón 1 tenemos: S12S12
* + S12S12* = 1, ó 2(S12S12
*) = 1.O bien:
|S12|2 = ½. Si S12 es real entonces:22
21
12 ==S .
Aplicando la ecuación (10) al renglón 4 tenemos:
|S24|2 = ½. Si S24 es real entonces :22
24 =S .
Por lo tanto la matriz de dispersión de la T-mágica que dada como:
[ ]
−−
=
01101001
10010110
22S .

43
Se hizo un programa en MATLAB que simula el funcionamiento de una T-híbridautilizando su matriz de dispersión característica.
Al correr el programa en la ventana de comandos de MATLAB obtenemos losiguiente:
» magic_T
B =
2.1213 0 0 0.7071Este resultado nos muestra que en la rama 1 se da la suma de señales y en larama 4 la diferencia.
Nos faltaría demostrar la utilidad de la T-mágica como divisor de potencia, para loque necesitamos cambiar el valor del vector A. Suponga que A = [1 0 0 0]entonces al correr el programa obtenemos:
» magic_T
B =
0 0.7071 0.7071 0Lo cual demuestra que al utilizar la rama 1 como entrada la potencia se divide enlas ramas 2 y 3 con la misma fase.
De las características de la T-mágica sabemos que si se utiliza como entrada larama del campo eléctrico (rama 4) la potencia se divide entre 2 y 3 con fasesinvertidas. Por lo que al cambiar el valor del vector A por A = [0 0 0 1] obtenemos:
» magic_T
B =
0 0.7071 -0.7071 0Lo cual nos muestra como las ramas 2 y 3 tienen fases invertidas.
44
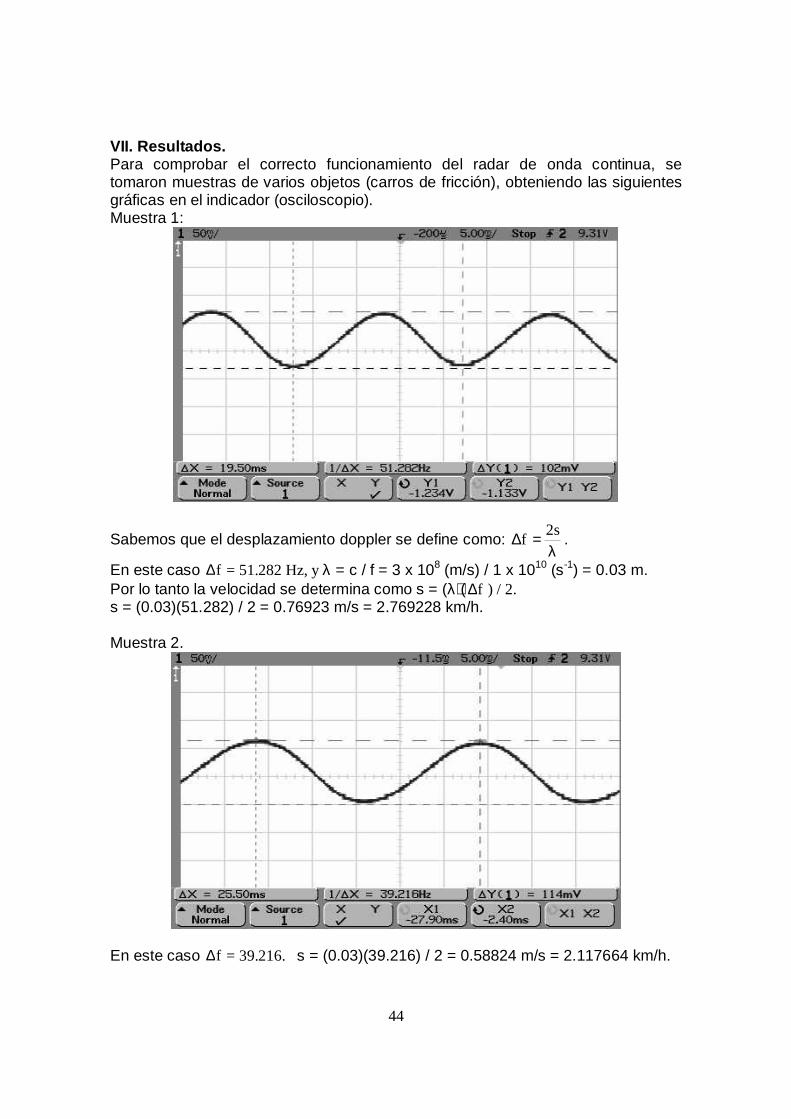
VII. Resultados.Para comprobar el correcto funcionamiento del radar de onda continua, setomaron muestras de varios objetos (carros de fricción), obteniendo las siguientesgráficas en el indicador (osciloscopio).Muestra 1:
Sabemos que el desplazamiento doppler se define como:λ2sf =∆ .
En este caso f∆ = 51.282 Hz, y λ = c / f = 3 x 108 (m/s) / 1 x 1010 (s-1) = 0.03 m.Por lo tanto la velocidad se determina como s = (λ)( f∆ ) / 2.s = (0.03)(51.282) / 2 = 0.76923 m/s = 2.769228 km/h.
Muestra 2.
En este caso f∆ = 39.216. s = (0.03)(39.216) / 2 = 0.58824 m/s = 2.117664 km/h.
45
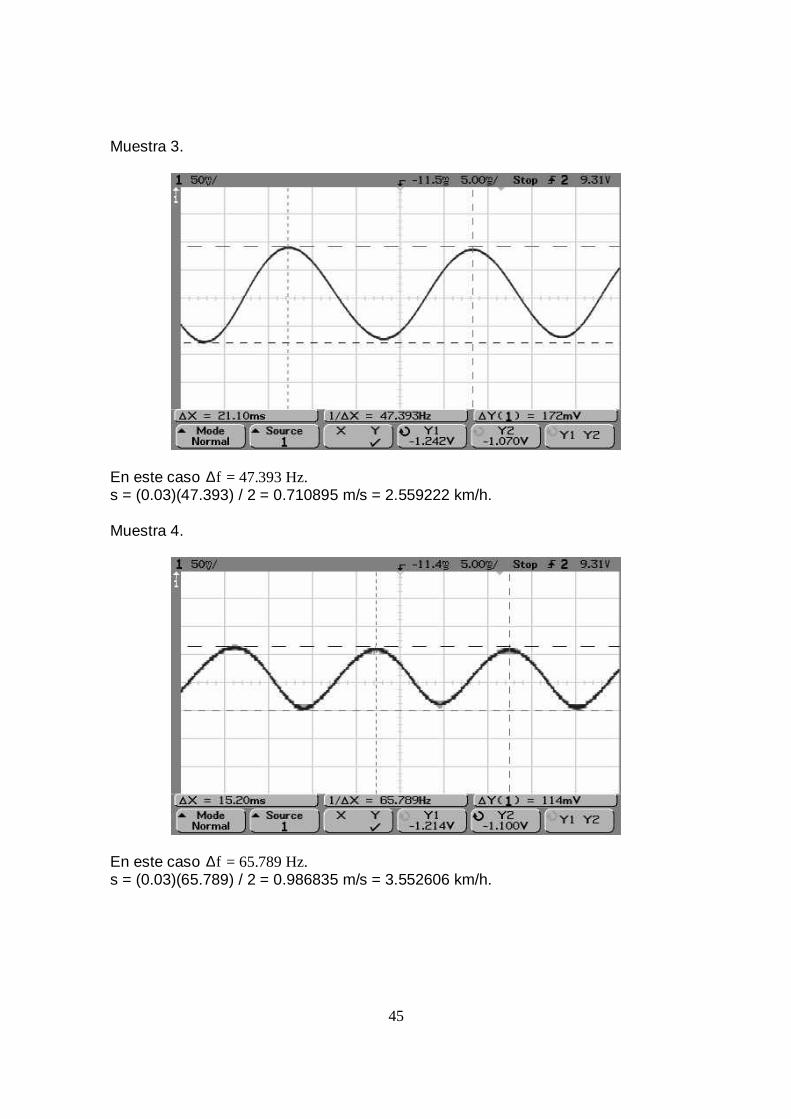
Muestra 3.
En este caso f∆ = 47.393 Hz.s = (0.03)(47.393) / 2 = 0.710895 m/s = 2.559222 km/h.
Muestra 4.
En este caso f∆ = 65.789 Hz.s = (0.03)(65.789) / 2 = 0.986835 m/s = 3.552606 km/h.

46
Se determinó el rango máximo del radar de efecto doppler experimentalmente,obteniéndose que la señal todavía era observable a 5.30 m.A continuación se presenta una tabla donde se indica la distancia y la amplitud envoltaje de la señal observada.
Distancia en metros (m). Amplitud en milivolts (mv).5.30 102.30 201.30 600.70 110
VIII. Conclusiones.Se desarrolló una investigación sobre el radar, su principio de operación y susbloques constituyentes, con la intención de ver que tipo de radar podíamos realizarcon el ED-3000, que es el equipo de microondas con que se cuenta en la UAMIztapalapa.Se implementó un radar de onda continua que detecta el desplazamiento doppler,con un rango de detección máximo de 5.30 m y una potencia de transmisión enfunción del oscilador Gunn de 10 mW.Los resultados determinados son aproximados, ya que no se cuenta con lainstrumentación adecuada para realizar mediciones más precisas.En trabajos futuros puede modificarse el circuito a fin de medir de una maneramás adecuada la potencia del transmisor y de obtener un radar de pulso, para locual debe integrarse los dispositivos modulador y duplicador.
47
IX. Bibliografía.Libros.
• Fields and Waves in Communication Electronics. Ramo, Whinnery, Van Duzer. Ed. John Wiley & Sons. 1994. Capítulos 11 y 12.
• Electromagnetic Concepts and Applications.Marshall, DuBroff, Skitek.Ed. Prentice Hall. 1996.Capítulo 12.
• Fundamentals of Applied Electromagnetics.Ulaby; Fawwaz T.Ed. Prentice Hall. 1997.Capítulo 10.
• Sistemas de transmisión: líneas, cables coaxiales, guías de onda y fibrasópticas.Salmerón Domínguez M. J., López Navarro D.Ed. Trillas. 2000.Capítulo 9.
Sitios web.• http://www.ccrs.nrcan.gc.ca/ccrs/learn/tutorials/fundam/chapter3/chapter3_2
_e.html• http://www.tpub.com/content/neets• http://mitglied.lycos.de/radargrunlagen/bauelemente/be01-en.html• http://www.ed.co.kr/english/product_viewasp?file=./educational/commutrain/
ED-3000/ED-3000.html