UNIVERSIDAD DE CHILE - casim.utfsm.cl Cardenas_USACH... · Reemplazar transformador en...
39
UNIVERSIDAD UNIVERSIDAD DE CHILE DE CHILE SISTEMA DE CONTROL RESONANTE P ARA CONVERSORES SISTEMA DE CONTROL RESONANTE P ARA CONVERSORES DE CUATRO PIERNAS ALIMENTANDO CARGAS DESBALANCEADAS DESBALANCEADAS Roberto Cárdenas D. Carlos Juri M. Departamento de Ingeniería Eléctrica Universidad de Chile
-
Upload
nguyenquynh -
Category
Documents
-
view
218 -
download
0
Transcript of UNIVERSIDAD DE CHILE - casim.utfsm.cl Cardenas_USACH... · Reemplazar transformador en...

UNIVERSIDAD UNIVERSIDAD DE CHILEDE CHILE
SISTEMA DE CONTROL RESONANTE PARA CONVERSORESSISTEMA DE CONTROL RESONANTE PARA CONVERSORESDE CUATRO PIERNAS ALIMENTANDO CARGAS
DESBALANCEADASDESBALANCEADAS
Roberto Cárdenas D. Carlos Juri M.Departamento de Ingeniería Eléctrica
Universidad de Chile

VENTAJAS DE GENERADORES DIESEL OPERANDO AVELOCIDAD VARIABLEVELOCIDAD VARIABLE
Los generadores diesel habitualmenteoperan a velocidad fija, para suministrarp j , pseñales de 50Hz. a la red o carga aislada.
Esto produce baja eficiencia en términosEsto produce baja eficiencia en términosde combustible por kWh.
También se producen algunos problemasde mantenimiento, debido a lo cual se,recomienda operar el generador con unacarga mínimacarga mínima.
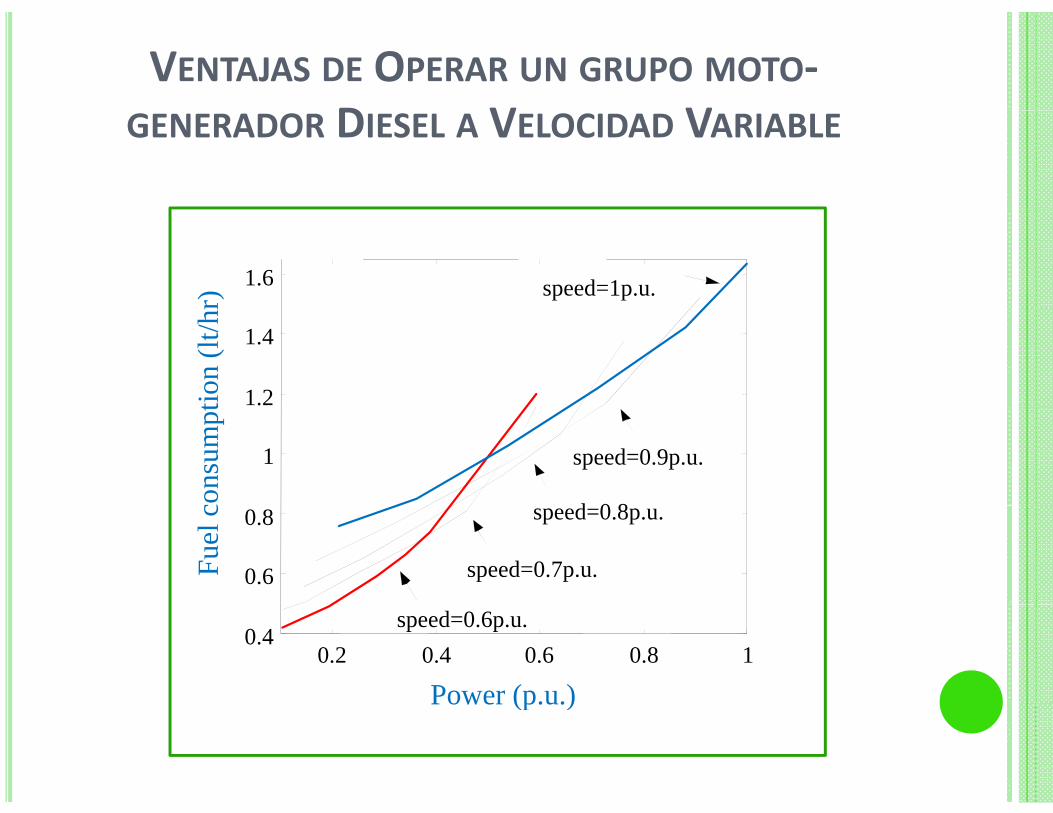
VENTAJAS DE OPERAR UN GRUPO MOTO‐D V VGENERADOR DIESEL A VELOCIDAD VARIABLE
1.6
r) speed=1p.u.
1.2
1.4
tion
(lt/h
r
1
cons
umpt
speed=0.9p.u.
d 0 8
0.6
0.8
Fuel
c speed=0.8p.u.
speed=0.7p.u.
0.2 0.4 0.6 0.8 10.4
Power (p.u.)
speed=0.6p.u.
Power (p.u.)
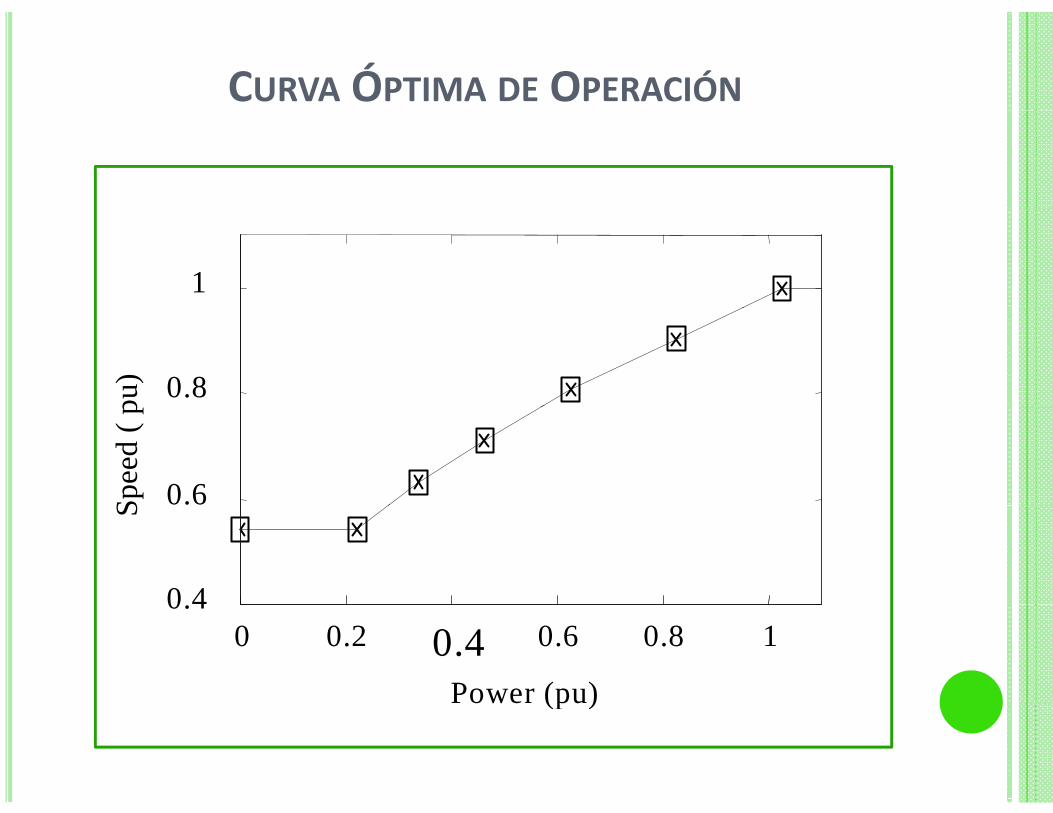
CURVA ÓPTIMA DE OPERACIÓN
1
0.8pu)
0.6Spee
d( p
0 4
S
0 0.2 0.4 0.6 0.8 10.4
Power (pu)owe (pu)

CARGA DESBALANCEADAGrupo Moto-Generador
Di lDieselSeñales de Frecuencia
Variable
Conversor deP t iPotencia
a b c
OSeñales de
CargaDesbalanceada
Con NeutroOuputFilter
Star connected
50Hz
Star-connectedload n

CONVERSOR DE CUATRO PIERNAS PWM FUENTE DEVOLTAJEVOLTAJE
Una de estas piernas actúa como neutro
El puente rectificador a b c nppuede reemplazarse por
otro conversor PWM(configuración back to back)
Carga desbalanceada
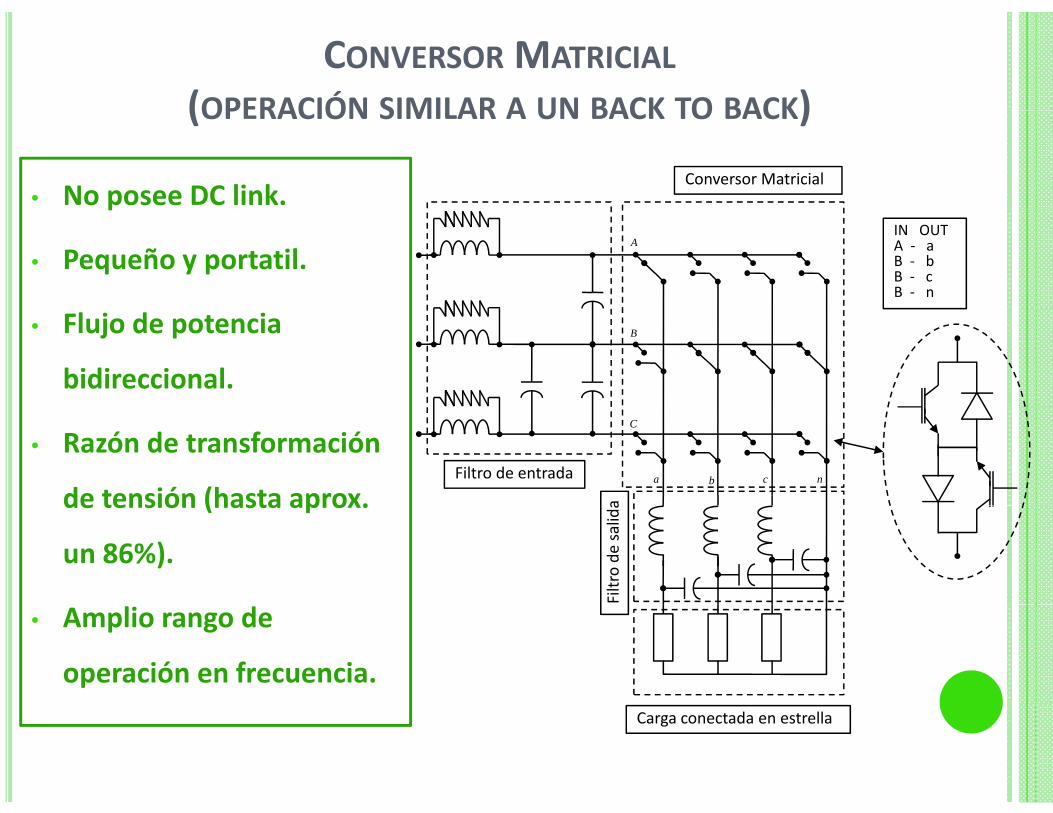
CONVERSOR MATRICIAL(OPERACIÓN SIMILAR A UN BACK TO BACK)(OPERACIÓN SIMILAR A UN BACK TO BACK)
• No posee DC link.Conversor Matricial
p
• Pequeño y portatil.A
IN OUTA ‐ aB ‐ bB ‐ cB ‐ n
• Flujo de potencia
bidireccional.
B
• Razón de transformación
de tensión (hasta aprox.
C
a b c nFiltro de entrada
ade tensión (hasta aprox.
un 86%).
Filtro de
salida
• Amplio rango de
operación en frecuencia.Carga conectada en estrella

APLICACIONES DE LOS CONVERSORES DE CUATROPIERNASPIERNAS
Generación Diesel.
Sistemas Eólico‐Diesel.
Reemplazar transformador en delta‐estrella tili d l t l í d l t ó iutilizados en algunas topologías de electrónica
de potencia.
Eliminar la circulación de secuencia cero por d t f dgeneradores y transformadores

EJEMPLO DE APLICACIÓN
Generador de Imanes
ConversorMatricial Carga
CargaMáquinaDIESEL
de Imanes permanentes
Matricialde cuatro piernas
MC
Carga desbalanceada
CargaDIESEL
Control de
MC
MATRIXVelocidad
* +-
FILTRO
MATRIXCONVERTER
OR 4-Leg PWM VSI
FILTRO
rr +Algoritmo de Modulación
SVMTensión de entrada Corriente de salida
Cálculo de la
Curva óptimaPotencia-RPMPe
Control de tensión
SVMTensión de entrada Corriente de salida
Potencia de salida de CargaTensión de salida

ALGUNOS SISTEMAS DE CONTROL POSIBLESALGUNOS SISTEMAS DE CONTROL POSIBLES
Controlador Lazo CerradoLazo Cerrado
D‐q Resonante
D‐q convencional D‐q± D‐q‐0 Sintonizado
en 50HzMúltiples
sintonizaciones
Discutidos enDiscutidos en esta charla

CONTROLADOR RESONANTE (CR)CONTROLADOR RESONANTE (CR)
Se ubica un polo en la frecuencia deseada (en estecaso 50Hz) sobre el círculo unitario.
Se obtiene ganancia infinita si se sintoniza el polog padecuadamente, es decir se sintoniza la frecuenciade operación en la frecuencia de resonancia.p
22 2)( nn ss
KG js
22)(
o
nncc
sKsG
js

IMPLEMENTACIÓN DEL CONTROL RESONANTE EN UNAFASEFASE
V * + Resonant
SVM
RVPlant
V anV an + ResonantController z‐1 ZOH
LfffL
L
RsLLCRsR
2
Va V an
‐

IMPLEMENTACIÓN DEL SISTEMA DE CONTROL RESONANTEv v v
Plant AA/D A/DA/D
vag vbg vcg
V *an +afffa
a
RsLLCRsR
2
Plant AVan
Grid Input Filt i
RCPhase a afffa
‐ Filtering
V * + bR
Plant BVbn
Phase a
RCPrism
Selection
TetrahedronSelection
V bn +bfffb
b
RsLLCRsR
2bn
‐Pl t C
RCPhase b
Selection
Selection
Duty CycleCalculation
V *cn
cfffc
c
RsLLCRsR
2
Plant CVcnRC
Phase c+ cfffc RsLLCRs
‐ Phase c
SVM Algorithm
+
a)
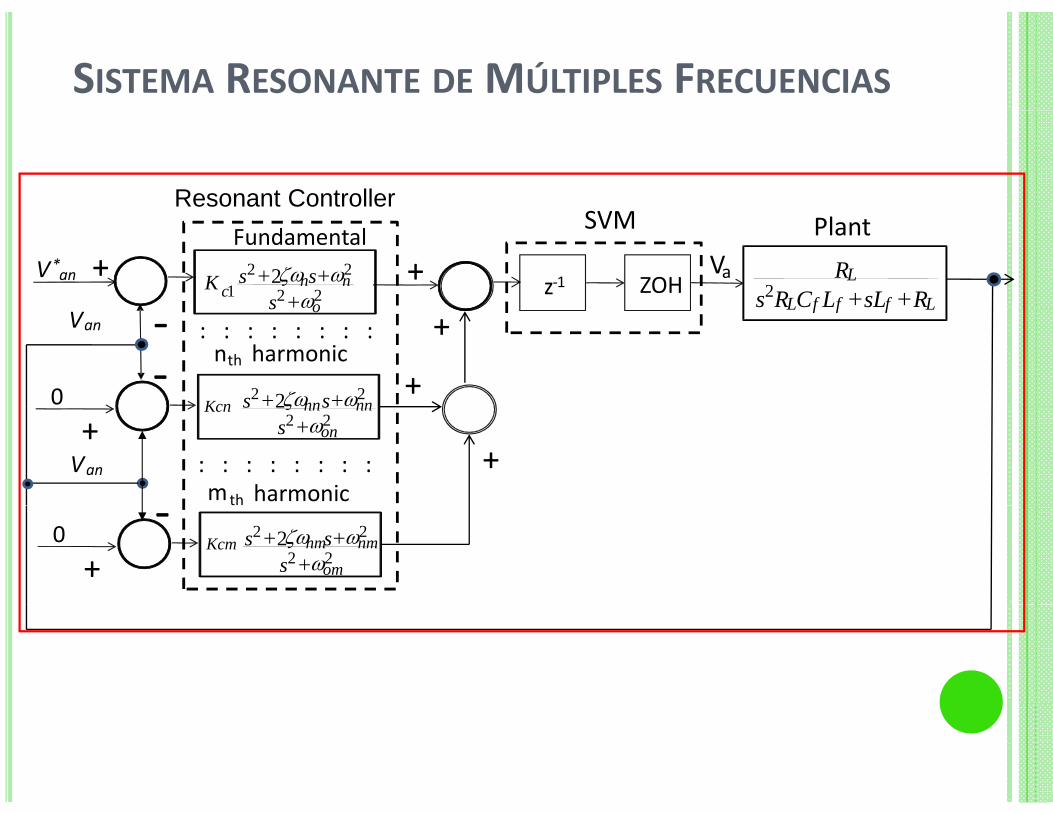
SISTEMA RESONANTE DE MÚLTIPLES FRECUENCIAS
Resonant Controller
V *an +22
221
2o
nnc sssK
Fundamental+ z‐1
SVM
ZOHLfffL
LRsLLCRs
R2
VaPlant
‐ os
22 2 nnnnssKcn
nth harmonic: : : : : : : :
0
V an
‐+
LfffL
+22
2on
nnnns
ssKcn
+
mth harmonic: : : : : : : : +V an
2222 2
omnmnm
sssKcm
0 ‐
+

RESPUESTA DE FRECUENCIA DEL CONTROLADORRESONANTE
150
) 50
100 50Hza)
ude
(dB
)
50
0
Mag
nitu -50
101 102 103 104 105
100 150Hz 200Hz
M
20
60 50Hz100Hz
250Hz
-20
20
Frequency (rad/sec)102 104103
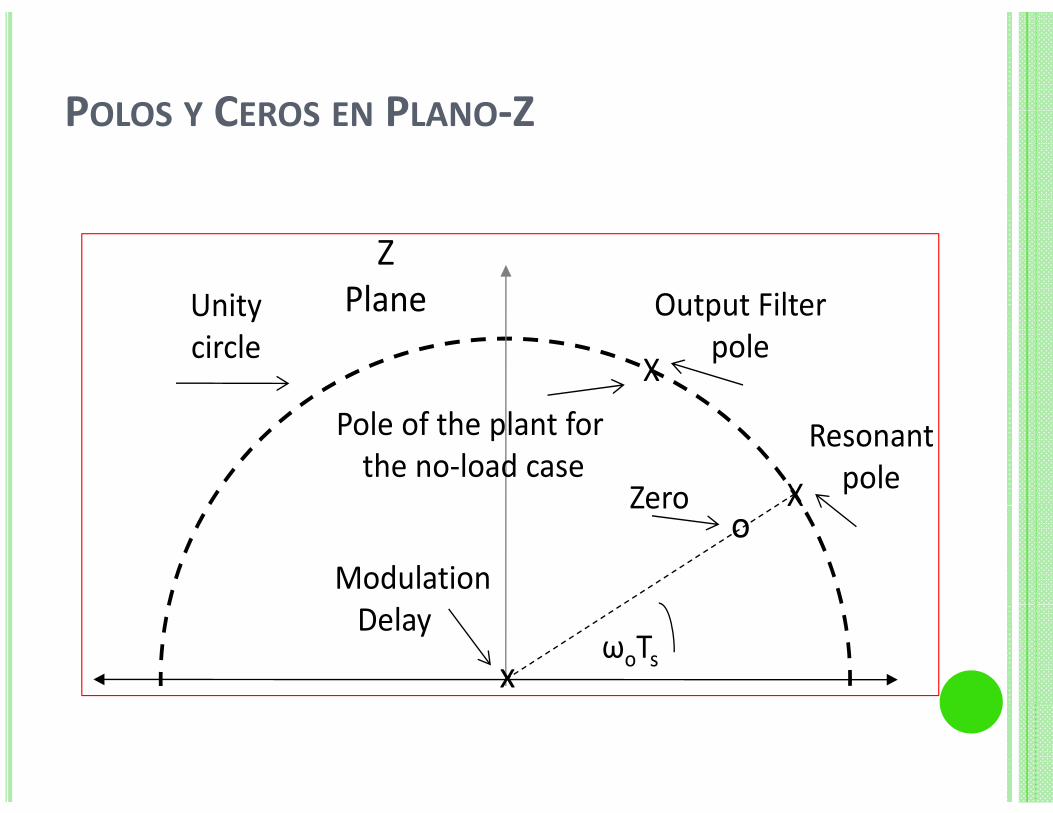
POLOS Y CEROS EN PLANO ZPOLOS Y CEROS EN PLANO‐Z
Output FilterZ
PlaneUnity
X
Output Filterpole
PlaneUnitycircle
X
ResonantpoleZero
Pole of the plant forthe no‐load case
Xo
Zero
Modulation
ωoTsxDelay

DISEÑO UTILIZANDO LUGAR DE LA RAÍZDISEÑO UTILIZANDO LUGAR DE LA RAÍZ

RESULTADOS EXPERIMENTALESSU OS S

PLATAFORMA EXPERIMENTAL

PLATAFORMA EXPERIMENTALPLATAFORMA EXPERIMENTAL

DISCONNECTION OF THE LOAD IN TWO PHASES
0
4 ia a)
-4
0
0
4 ib b)
ent (
A)
-4
0
Cur
re
0
4
0 0.2 0.4 0.6 0.8 1
-4
c)Time (s)
c)

DISCONNECTION OF THE LOAD IN TWO PHASES
246
ent(
A)
a)
4-202
utra
l cur
re
0 0.2 0.4 0.6 0.8 1-6-4
Neu
V) 150
Volta
ge(V
75
150 b)
Load
Vo
-75
0
0 0.05 0.1 0.15 0.2 0.25 0.3Time (s)
-150
Time (s)

ESCALÓN TRIFÁSICO EN LA CARGAESCALÓN TRIFÁSICO EN LA CARGA)
48
Load
rent
(A)
a)
0 0.5 1 1.5 2 2.50
LCu
rr
150
50
150
(V) b)
-50
Voltage
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-150Time (ms)
V
Time (ms)

CAMBIO DE LA FRECUENCIA DE OPERACIÓN(‘ ’)(‘ON THE FLY’)
50Hz 30Hz
0
50 50Hz 30Hz
-50
ge(V
)
a)
1.9 1.92 1.94 1.96 1.98 2 2.02 2.04 2.06 2.0850
ad V
olta
g 2.09
-50
0Loa
1.98 2 2.01 2.02 2.03
b)1.99

CAMBIOS CONTINUOS EN LA FRECUENCIA DEOPERACIÓN
V)
0
50
Volta
ge(V
0 0.05 0.1 0.15 0.2 0.25 0.3
-50Load
V
~50Hz ~0Hz
0
5
nt (A
)
0 0.05 0.1 0.15 0.2 0.25 0.3
-5
0
Cur
re
V i ió ti d d d t lTime (s)
~50Hz ~0Hz
Variación continua es adecuada para droop control
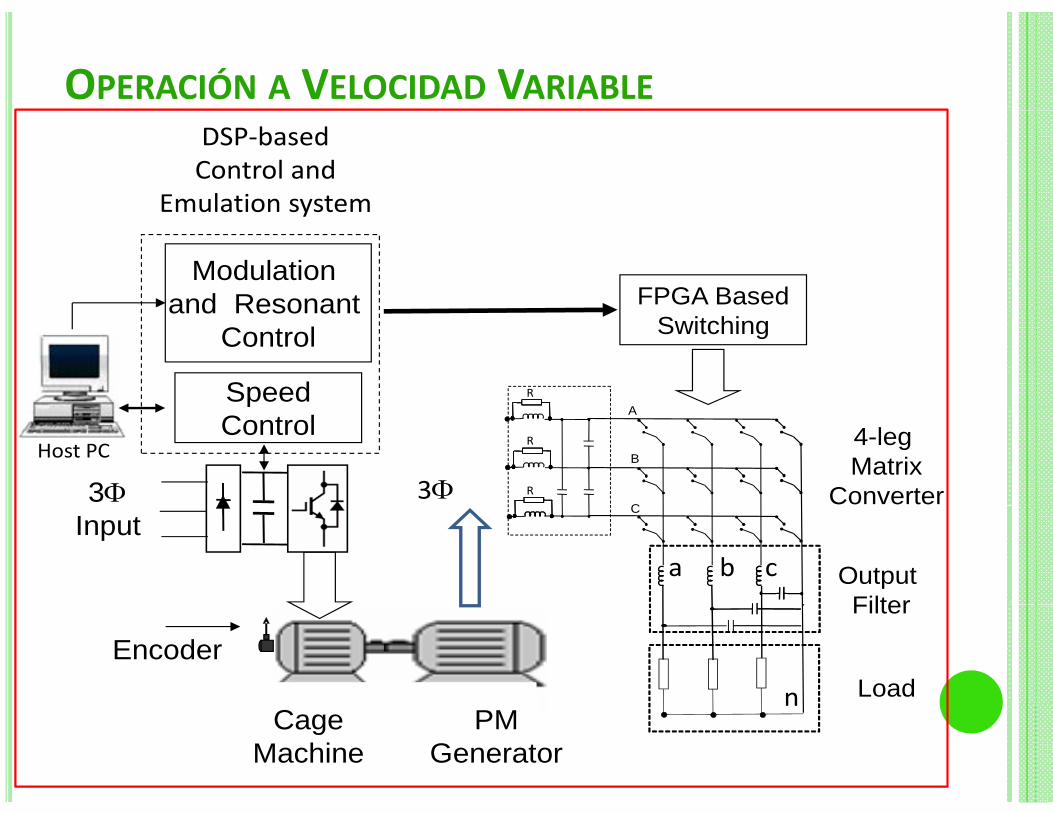
OPERACIÓN A VELOCIDAD VARIABLEDSP‐basedControl and
Emulation system
Modulationand Resonant
Emulation system
FPGA Based
Speed
and ResonantControl Switching
AR
Host PC
pControl
3 3
A
B
C
R
R
4-leg Matrix
ConverterInput
C
a b c Output Filter
EncoderFilter
LoadnCage
MachinePM
Generator
n

RAMPAS ASCENDENTES Y DESCENDENTES CONIMPACTOS DE CARGAIMPACTOS DE CARGA
a)1800m)
a)
1400
1800
peed
(rpm
Velocidad del generador
1000
b)200
250
Sp
e(V
)
100
150
Volta
ge
Voltaje de entrada
5
7
rren
t(A
)
c) Corriente de entrada
0 1 2 3 4 5 6 73C
ur
Time(s)
c)

RAMPAS ASCENDENTES Y DESCENDENTES CONIMPACTOS DE CARGAIMPACTOS DE CARGA
a)60
80
(V)
40
60
Volta
ge
Voltaje de Carga
20
b)15
A)
5
10
Cur
rent
(A
Corriente de Carga5
c)0.7
Co Razón de Voltajes
0.5
Qra
tio Razón de Voltajes Entrada/Salida
0 1 2 3 4 5 6 70.3
Time(s)
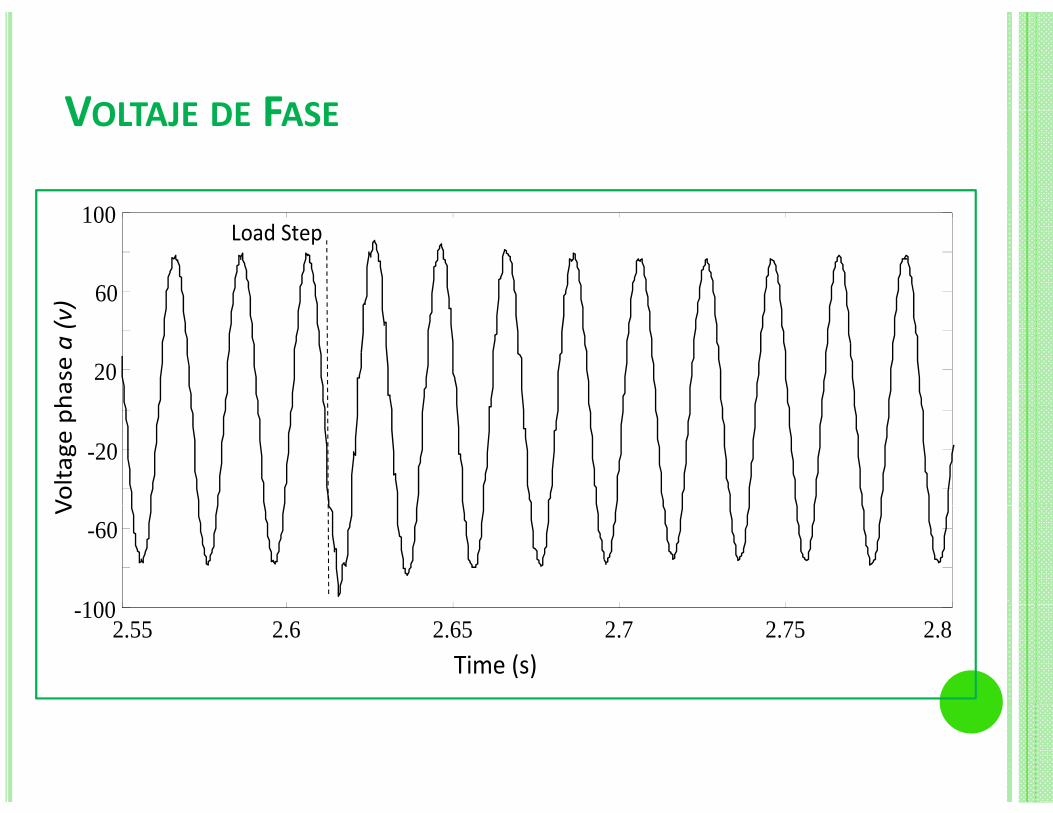
VOLTAJE DE FASEVOLTAJE DE FASE
100
60
100Load Step
)
20
hase
a (v)
-20
Volta
geph
100
-60
V
2.55 2.6 2.65 2.7 2.75 2.8-100
Time (s)

CONTROL DE UNA CARGA ALTAMENTE NO LINEALCONTROL DE UNA CARGA ALTAMENTE NO LINEAL
A
B
C
Filtro de salida
C
a b c n
CargaNo Lineal
nNo Lineal

CORRIENTES Y TENSIONES A LAZO ABIERTO ALIMENTANDO UNACARGA NO LINEALCARGA NO LINEAL8
) ia ib
0
4
orrie
nte
(A) a b
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-8
-4Co
50
100
V) va vb
-50
0
Volta
je (
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-100
Ti ( )Tiempo (s)

CORRIENTES Y TENSIONES UTILIZANDO EL CONTROLADOR
10
RESONANTE MULTI SINTONIZADO
0
5
rient
e (A
)
ia ib
0 0 01 0 02 0 03 0 04 0 05 0 06 0 07 0 08 0 09 0 1-10
-5Cor
r
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1150
V) vbva
-50
50
Volta
je (V ba
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-150Tiempo (s)Tiempo (s)

CALIDAD DE ONDA BAJO CONDICIONES NO LINEALES
100 Lazo abierto,
-100
0
,THD = 14.6%
100
R t
-100
0Resonante, THD = 9.7%
100 Resonante
-100
0
eso a temúltiple,THD = 3%

FIGURAS EN ESPECTRO DE FRECUENCIASFIGURAS EN ESPECTRO DE FRECUENCIAS
20
Lazo abierto
5
10
15 Lazo abierto, THD = 14.6%
0 1 2 3 4 5 6 7 8 9 100
15
20
R t5
10
15 Resonante, THD = 9.7%
0 1 2 3 4 5 6 7 8 9 100
15
20
Resonante
0
5
10
15 eso a temúltiple,THD = 3%
0 1 2 3 4 5 6 7 8 9 100
VIDEOSVIDEOS
R t i t i d 50HResonante sintonizado en 50Hz.
Resonante sintonizado en 0‐50‐100Hz.
Resonante sintonizado en 0‐50‐100‐150‐200‐250Hz.

ANALISIS EN ESPECTRO DEANALISIS EN ESPECTRO DEFOURIER

Espectro de frecuenciasexpresadas en % de la fundamental
10
20
)a
e p esa as e % e a a e a
Lazo abiertoTHD = 14.6%
0 1 2 3 4 5 6 7 8 9 100
10
20
)bControl D-qTHD = 14 55%
0 1 2 3 4 5 6 7 8 9 100
10
20
)c
THD 14.55%
Control D-q+-THD 13 8%
0 1 2 3 4 5 6 7 8 9 100
10
20
)d
THD = 13.8%
Control D-q-0
200 1 2 3 4 5 6 7 8 9 10
0
10 )d
)
qTHD = 12.1%
Control
0 1 2 3 4 5 6 7 8 9 100
10 )e
A ó i
Co t o ResonanteTHD = 9.7%
Armónicas

CONTROLADOR D-Q-0 Y CONTROLADORRRESONANTE SINTONIZADO EN 0-50-100-200-250
20
Espectro de frecuenciasexpresadas en % de la fundamental
0 1 2 3 4 5 6 7 8 9 100
10 )aControl D-q-0THD = 11.2%
10
200 1 2 3 4 5 6 7 8 9 10
)bControl ResonanteTHD = 6%
0 1 2 3 4 5 6 7 8 9 100
Armónicas
THD 6%

CONTROLADOR RESONANTE SINTONIZADOEN 0-50-100-150-200-250
Espectro de frecuenciasexpresadas en % de la fundamental expresadas en % de la fundamental
10
20
0 1 2 3 4 5 6 7 8 9 100
10
THD = 3%