UNIVERSIDAD DE SONORAposgrado.mat.uson.mx/tesis/maestria/jessica_santana...SINODALES Dr. Oswaldo...
157
El saber de mis hijos hará mi grandeza” UNIVERSIDAD DE SONORA Divisi ´ on de Ciencias Exactas y Naturales Programa de Posgrado en Matem´ aticas An´ alisis de Fen´omenos de Ondas No Suaves Mediante el M´ etodo Asint´otico D´ ebil TESIS que para obtener el grado acad´ emico de: Maestro en Ciencias (Matem´aticas) presenta: Jessica Yuniver Santana Bejarano Director de Tesis: Dr. Mart´ ın Gildardo Garc´ ıa A. Hermosillo, Sonora, M´ exico, 26 de Agosto de 2009
Transcript of UNIVERSIDAD DE SONORAposgrado.mat.uson.mx/tesis/maestria/jessica_santana...SINODALES Dr. Oswaldo...

El saber de mis hijoshará mi grandeza”
UNIVERSIDAD DE SONORA
Division de Ciencias Exactas y Naturales
Programa de Posgrado en Matematicas
Analisis de Fenomenos de Ondas No Suaves
Mediante el Metodo Asintotico Debil
T E S I S
que para obtener el grado academico de:
Maestro en Ciencias
(Matematicas)
presenta:
Jessica Yuniver Santana Bejarano
Director de Tesis: Dr. Martın Gildardo Garcıa A.
Hermosillo, Sonora, Mexico, 26 de Agosto de 2009

SINODALES
Dr. Oswaldo Gonzalez Gaxiola
Dpto. de Matematicas Aplicadas y Sistemas
Universidad Autonoma Metropolitana
Unidad Cuajimalpa (UAM-C).
Dr. Yuri Vorobev
Universidad de Sonora, Hermosillo, Mexico
Dr. Georgii Omel’ianov
Universidad de Sonora, Hermosillo, Mexico
Dr. Martin G. Garcıa A.
Universidad de Sonora, Hermosillo, Mexico


“No se que le parece al mundo, pero, a mi juicio, no he sido mas queun nino que se dedico a jugar en la playa regocijandose al encontrarun guijarro mas pulido que los demas o una concha marina masbonita que las ordinarias, mientras el oceano de la verdad yacıaante mı esperando que lo descubriera.”
Issac Newton

ANALISIS DE FENOMENOS DE ONDAS NO SUAVESMEDIANTE EL METODO ASINTOTICO DEBIL
JESSICA YUNIVER SANTANA BEJARANOUNIVERSIDAD DE SONORA

Dedico este trabajo a las personas que mas amo:
A mi mamaMargarita Bejarano Murrieta
A mis hermanos:Vitaliano, Dupret, Hildegardo, Uriel, Edna, Cinthya, Jaziel yBelem.

Agradecimientos i
AGRADECIMIENTOS
Primeramente le doy gracias a Dios por haber estado presente en mi caminar en todomomento, ya que gracias a el puedo plasmar hoy en estas paginas estas palabras, pues elfue quien me dio tantas fuerzas para salir adelante, el a sido mi fortaleza, mi ejemplo, laluz de mi vida; esa luz que en un momento se volvio oscuridad pero gracias a el en miy en mi corazon se encendio una luz, una esperanza y una nueva ilusion por la cual saliradelante. Una ilusion aun mas grande que aquella que cuando aun siendo yo muy jovensentı que la vida me arrebataba, pero solo fue una prueba, una prueba que a estas alturassolo los que me rodeaban pueden dar testimonio de si pude aprobar. Si solo aquellos queme apoyaron incondicionalmente y que nunca me dieron la espalda. A ellos con quienpude compartir mis alegrıas y mis tristezas mis altas y mis bajas.
A aquellas personas que me extendieron la mano cuando mas lo necesite, les agradezcoy aquı tienen una pequena muestra de todo lo que podrıa hacer con esfuerzo y dedicacion.
A mi director de tesis Dr. Martın Gildardo Garcıa Alvarado quien desde el primermomento me extendio la mano, me abrio las puertas para continuar con mis estudios enesta Universidad de Sonora, cuando mas lo necesite; ademas de ser pieza clave para queeste trabajo llegara a su culminacion, y de apoyarme con sus consejos y experiencia cuandome ofrecieron mi primer trabajo en la Universidad del Valle de Mexico y principalmentepor que tanto mi mama como mis hermanos le estamos muy agradecidos ya que graciasa el podemos disfrutar aun de nuestra madre, el pilar mas importante de nuestra familia,realmente a sido de gran bendicion para mi vida.
Agradezco a CONACYT por el apoyo que me brindo durante el ultimo semestre demis estudios de maestrıa.
A mis amigos, que incondicionalmente me ofrecieron su apoyo en todo momento ycon quienes tuve muchas experiencias.
A mis sinodales por las correcciones y sugerencias que me dieron para que este trabajode tesis culminara con exito y fuera de mayor comprension para el lector.
Realmente este trabajo de tesis a sido una gran experiencia para mi, porque en el hepodido plasmar una pequena parte de la gran utilidad del Analisis Matematico, algo quemuy pocos estudiantes realmente tienen la fortuna de encontrar ya que la gran mayorıapiensa que es una materia demasiado abstracta y para la cual no encuentran relacionalguna con la vida real.
En este trabajo aprendı a aplicar lo que conozco del analisis, a utilizar paqueterıa deprogramacion para simular algunos programas; relacionar fuertemente a esta materia conla Fısica, etc.
A la Doctora Martha Dolores Guzman Partida por brindarme su apoyo y confianzaen todo momento, ademas de introducirme en el tema de las Distribuciones y despertaren mi un gusto enorme por el Analisis. Por saber aconsejarme cada vez que lo necesite.
Tesis de Maestrıa

ii Agradecimientos
A mi hermano Vitaliano por ser mi companero de travesuras y alegrıas, por recorrertantos momentos de la vida a mi lado. A Dupret por ser un muchacho con tantas ganasde salir adelante y por su apoyo incondicional durante todos estos anos. A mis hermanosHildegardo y Uriel por que han aprendido a vivir solos lejos de nosotros en Guanajuatoy Guadalajara, mostrandonos que pueden salir adelante con gran esfuerzo y por el gustohacia sus estudios, a pesar de que las cosas se tornen en muchas ocasiones difıciles. Ami hermana Edna por ser una chica seria pero detras de esa seriedad encuentras un almalinda y alegre, con muchas ganas de salir adelante y ademas tener un gran gusto por lavida y la naturaleza, a sido un gran ejemplo para sus hermanos mas grandes pues nos hamostrado que es muy interesante el tener las puertas abiertas a este mundo y que podemosvivir momentos inolvidables con la gente que nos rodea. A Cinthya por ser la alegrıa dela casa, por ser una nina atrevida y que le gusta disfrutar cada oportunidad que la vidale ofrece. A Jaziel y a Belem los mas pequenos de todos, quienes dıa a dıa nos recuerdanque es mejor vivir la vida sin preocupaciones y miedos como solo un alma de ninos puedehacer, pues mientras uno crece va adquiriendo mas responsabilidades.
A todos mis companeros de maestrıa, mas aun a mis amigos con quienes compartıgrandes momentos al correr del tiempo en este recinto del saber, experiencias tanto en elaprendizaje que te exige la vida diaria como en lo profesional.
Agradezco tambien a la Universidad de Sonora, porque ha sido como mi segunda casa;sus edificios y sus pasillos estan llenos de la historia de todos aquellos estudiantes que hanpasado por este recinto del saber con grandes deseos de crecer en su area, sus arbolesviejos y grandes han sido la sombra de muchos que por aquı pasamos todos los dıas y susmaestros llevan con ellos a todos aquellos estudiantes que una vez tocaron sus puertaspara conocer un poco mas de aquellas cosas que les interesaban.
A MI MADRE. Ha esa personita que tanto aprecio, que me ha dado de si, todo y sinembargo, jamas me pide algo. Me ha dicho tanto y sin embargo, no usa palabras sinoactos. En cada labor que hace en cada caricia aun en cada reproche, esta su amor por mı.En ella vi la primera luz en ella vi el amor mas puro el amor que solo ella me sabrıa dar;el de madre. A ella que ha tenido desvelos a ella que ha sabido darme consuelo, a ella queha festejado conmigo todas esas victorias, pero aun mas importante ha estado conmigoen mis fracasos cuando mas sola me sentıa. Ası es, aun en los momentos mas difıcilescuando todo se torna oscuro su luz es mas intensa mas brillante, mas bella; pues su luzes de amor, amor que me da dıa a dıa con esa paciencia con esa templanza que hicieraparecer guerrera cuando no es sino una mujer de la que yo en todo dependo. No tengoni que contarlo como yo le he faltado como la he valorado, como en silencio la amo y sinembargo no puedo externarlo ¿Y saben? aun ası, se que lo sabe. Por eso hoy lo plasmo enestas hojas, no esperare mas a decirlo pues se, no la tendre siempre y no quiero tener esearrepentimiento, de no haberselo dicho. Decirle a mi madre que la quiero, que siemprela he admirado de como en silencio me mira cuando ya estoy dormida, de como aun yamayor pasa a mi cuarto y me da un beso, de como siento su calor cuando esta cerca aun
Jessica Yuniver Santana Bejarano

Agradecimientos iii
estando dormida y con ello tengo para sentirme protegida; como cuando era una nina.Si soy una nina que sigue a su madre pues aun cuando he crecido su amor me mantienejoven, ası en sus ojos al voltear a verme no ve a un adulto ya crecido, sino a su bebe quela sigue necesitando como cuando la tenıa en su regazo. Escribo esto para que cuandoella pase por conflictos y tenga pendiente de mı, recuerde que alguna vez, exprese que laamo por como es, por como me quiere y sin embargo es tan intensa su luz que me impideverla de frente y decirle lo que como ser humano, como hija afortunada le he deseadodecir siempre que la amo sin palabras, sin miradas tan solo con el alma entrelazada puesa fin de cuentas fuimos uno y esa union nos mantendra siempre ası como una hija y unamadre que se aman. Recuerde madre querida, si es que el dıa de manana como todos losanos me brota la cobardıa, que la quiero que estuve una tarde escribiendo estas palabrascontandole a estas hojas lo maravillosa que es y que me siento afortunada de tenerla comoamiga, como confesora, como madre...
Te quiero madre y lamento ser una cobarde por no saber decırtelo en persona, auncuando se, tu lo sabes...
Todo lo que he logrado en mi vida, a sido gracias a ti que siempre me apoyaste y meaconsejaste, te los dedico en esta fecha tan especial para mi pues son tuyos ya que un dbıate pusiste la meta de sacarme adelante y en esta ocasion una vez mas lo has logrado; sison logros que tal vez yo he representado como persona pero en mi solo se ve el reflejo delo que tu sola madre querida has cultivado. Una mujer con metas, con suenos, sin temora la vida, responsable y que cuando se traza metas nunca mira atras. Y todo esto no selo debo a nadie mas que a ti, por que toda tu vida me la dedicaste para llevarme por elbuen camino. b Con todo mi amor para ti mamita linda.
Te amo mama.
Jessica
Tesis de Maestrıa

iv Agradecimientos
Jessica Yuniver Santana Bejarano

Introduccion
El objetivo de este trabajo es dar una presentacion rigurosa y detallada de una apli-cacion de la teorıa de distribuciones en ecuaciones diferenciales parciales.
La primera mitad de este trabajo la dedicamos al estudio de resultados basicos de lateorıa de distribuciones, la cual fue creada, hacia 1950, por Laurent Schwartz y por laescuela rusa I. M. Gelfand, G. E. Shilov, Sergei Sobolev para dar sustento matematicoa varios resultados fısicos que fueron utilizados con exito por los fısicos a pesar de suinconsistencia matematica inicial.
Estos resultados iniciaron con la funcion de Heaviside y culminaron con la creacionde la delta de Dirac, δ(x), cuya definicion, como funcion de densidad, no tiene sentidomatematico. Esta situacion creaba una situacion contradictoria, por un lado fecundidadde su empleo, por el otro carecıa de sentido matematico. Schwartz decıa que cuando estassituaciones se presentan es muy raro que no resulte una nueva teorıa matematica quejustifique el lenguaje de los fısicos y que hay en ello una fuente importante de progresopara la matematica y la fısica.
Por otro lado, es muy comun que se presenten situaciones contradictorias. Porejemplo, la creacion de los numeros complejos la cual comprende a los ya conocidos.Analogamente, las distribuciones generalizan a las funciones en un sentido similar al quelos numeros complejos generalizan a los reales; se obtienen ası entes mas generales, quetienen propiedades nuevas. Por ejemplo las distribuciones son siempre derivables y formanun nuevo campo de estudio mas rico y armonioso que el de las funciones en el sentidoclasico.
La teorıa de distribuciones ha tenido sus precursores, como lo son las generalizacionesdel concepto de funciones de Bochner y Sobolev, pero puede afirmarse que la de Schwartzes la primera teorıa completa que ha podido englobar y precisar diversos conceptos dediversas ramas de las matematicas los cuales en muchas ocasiones fueron formuladosincorrectamente, razon por la cual esta teorıa es de gran interes en el ambiente matematico.
Un estudio riguroso y profundo de la teorıa de distribuciones exige conocimientosavanzados de topologıa , analisis funcional y de la teorıa integral de Lebesgue. En este
v
vi Introduccion
trabajo de tesis, solo presentaremos las herramientas necesarias para abordar un estudiode fenomenos de ondas utilizando el metodo asintotico debil.
Este trabajo esta dividido en cinco capıtulos y la lectura y comprension de este suponedel lector un bagaje mınimo de analisis, algebra lineal y ecuaciones diferenciales.
En el capıtulo 1 de esta tesis, presentamos a la ya mencionada funcion de Heaviside,algunas de sus propiedades, la definicion y propiedades de la Delta de Dirac por mediode sucesiones de Dirac, tambien presentamos algunos ejemplos de sucesiones delta.
En el capıtulo 2 se presentan las herramientas y terminologıa necesaria para abor-dar los conceptos basicos de la teorıa de distribuciones; en el establecemos las bases delespacio de funciones de prueba D, del cual, una vez que conocemos las propiedades delos elementos que podemos encontrar en el, construimos algunos elementos para asegurarque no estamos trabajando en un espacio trivial, ilustrando con varios ejemplos de dis-tribuciones y por ultimo damos a conocer el concepto de regularizacion para prolongar elconcepto de distribuciones en un entorno de un punto singular de ella.
En el capıtulo 3 presentamos algunas propiedades que extienden el concepto de funciona distribuciones por medio de operadores lineales, tales como operaciones algebraicas,operaciones analıticas, ademas de dar a conocer el concepto de soporte y soporte singularde una distribucion y por ultimo el concepto de convergencia en el sentido distribucional.
En el capıtulo 4 presentamos algunas propiedades adicionales tales como la transfor-mada de Fourier para lo que necesitamos introducir el concepto de funciones de pruebade rapido decaimiento, lo que nos lleva a la nocion de distribucion temperada; tambienanalizaremos los conceptos de producto directo y convoluciones, ası como sus propiedadesmas importantes.
El capıtulo 5 es la parte central de este trabajo. Presentamos una aplicacion intere-sante de la teorıa de distribuciones: la interaccion kink-antikink en ecuaciones semilinealescon un parametro pequeno. Se hace uso del metodo asintotico debil, que ha sido desarro-llado recientemente por los profesores G.Omelyanov et. al. ([4]), cuya ventaja principalconsiste en reducir el problema de describir la interaccion no lineal de ondas al analisis deun sistema de ecuaciones diferenciales ordinarias. Se estudian condiciones para la parte nolineal bajo las cuales el resultado de la interaccion consiste en un pequeno desplazamientode los frentes de onda, sin alterar la forma de las mismas, situacion que se conoce comoescenario de sine-Gordon.
La forma de la solucion de tipo kink de la ecuacion de onda semilineal, que presentamosen este trabajo, es similar a una onda de choque suave. Sin embargo, estas ondas tienenpropiedades diferentes. El metodo asintotico debil toma en cuenta el hecho de que loskinks y antikinks no se deforman despues del momento de la interaccion al igual quelos solitones pero toman la forma de funciones de Heaviside, es decir son suaves cuandoε > 0 pero en el paso al lımite cuando ε→ 0 se vuelven no suaves, por lo cual definimos
Jessica Yuniver Santana Bejarano

Introduccion vii
el concepto de solucion debil. Por esta razon este tipo de soluciones es tratada comoun mapeo C∞ para ε > 0 y unicamente como C uniformemente en ε > 0. Por lo cuallas soluciones asintoticas de tipo kink requieren un anzatz especial relacionado con la nolinealidad.
La ecuacion de sine-Gordon aparecio en geometrıa diferencial y en la teorıa de camposrelativistas. Esta ecuacion , ası como tambien algunas tecnicas de solucion, fue conocidaen el siglo XIX, la ecuacion crecio en importancia cuando se encontro que tiene solu-ciones de tipo “kink-antikink” con las propiedades de colision que tienen los solitones. Laecuacion de sine-Gordon tambien aparece en un gran numero de otras aplicaciones fısicas,incluyendo la propagacion de fluxones, el movimiento del pendulo rıgido, etc.
Uno de los logros mas notables que se han conseguido en la segunda mitad del sigloXX y que ademas ilustra con claridad la unidad subyacente de las Matematicas y laFısica No Lineal es la teorıa de Solitones. Los solitones son ondas nolineales que exhibenun comportamiento extremadamente inesperado e interesante, ondas solitarias que sepropagan sin deformarse.
Tradicionalmente, hablamos de dos tipos de ondas. Las primeras, las ondas lineales,son las ondas familiares de la vida diaria, como, por ejemplo, las ondas de luz y lasondas de sonido. Estas ondas tienen velocidad constante, sea cual sea su forma: un Dosostenido viaja a la misma velocidad que un Fa bemol. Y, ademas, tienen longitud deonda constante: un Do sostenido sigue siendo un Do sostenido si se oye a un metro oa 100 metros de distancia. Las ondas lineales tambien obedecen al llamado principio desuperposicion que, en el caso de las ondas sonoras, si se tocan varias notas simultaneamenteen un piano, se escuchara la “suma” de todas esas notas a la vez, y esto es lo que producearmonıa. Por muy complicado que sea un sonido se puede descomponer en los armonicosbasicos que lo constituyen.
Las ondas no lineales son menos familiares. Una ola en el mar aproximandose haciala orilla es un buen ejemplo de onda no lineal (en el supuesto de que la ola es solucion, enalgun sentido, de una ecuacion diferencial no lineal ). Observese que ahora la amplitud,la longitud de onda y la velocidad, van variando segun avanza la ola, mientras que enlas ondas lineales estas son constantes. La distancia entre las crestas va decreciendo, laaltura de las olas va creciendo mientras van percibiendo el fondo, y la velocidad cambia;la parte superior de la ola se adelanta sobre la inferior, cae sobre ella y la ola rompe.
Como veremos a lo largo del trabajo, el estudio de cada uno de estos casos particulareslleva consigo el manejo de herramienta matematica que incluso por sı misma reviste ungran interes, ademas de su trascendencia.
Esperamos que este trabajo de tesis pueda servir como referencia para los estudiantesy profesores tanto de Matematicas como de otras disciplinas cientıficas que se interesenen el estudio de fenomenos no lineales.
Tesis de Maestrıa

viii
Jessica Yuniver Santana Bejarano

Contenido
Agradecimientos i
Introduccion v
1 La delta de Dirac. 1
1.1 La funcion de Heaviside . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Sucesiones delta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Sucesiones de Heaviside . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Introduccion a la Teorıa de Distribuciones 11
2.1 Notacion y terminologıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Funciones de prueba . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3 Funcionales lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4 Distribuciones regulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.5 El Espacio D′ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.6 Ejemplos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.7 Regularizacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3 Extension de Operadores Lineales de Distribuciones 29
3.1 Operadores algebraicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1.1 Cambio de variables . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1.2 Traslacion por y ∈ Rn fijo . . . . . . . . . . . . . . . . . . . . . . . 31
ix
x CONTENIDO
3.1.3 Producto de una distribucion y una funcion . . . . . . . . . . . . . 33
3.1.4 Composicion con transformaciones lineales . . . . . . . . . . . . . . 34
3.2 Operaciones analıticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.2.1 Diferenciacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.2.2 El Soporte y el soporte singular de una distribucion . . . . . . . . . 42
3.2.3 Convergencia de distribuciones . . . . . . . . . . . . . . . . . . . . . 48
4 Propiedades Adicionales de Distribuciones. 53
4.1 Distribuciones temperadas y transformadas de Fourier . . . . . . . . . . . . 53
4.1.1 Funciones de Prueba de Rapido Decaimiento . . . . . . . . . . . . . 55
4.1.2 Distribuciones Temperadas . . . . . . . . . . . . . . . . . . . . . . . 57
4.1.3 Transformada de Fourier . . . . . . . . . . . . . . . . . . . . . . . . 61
4.2 Producto Directo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.2.1 El Producto Directo de Distribuciones Temperadas . . . . . . . . . 72
4.2.2 La Transformada de Fourier del Producto Directo de DistribucionesTemperadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.3 La Convolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.3.1 Convolucion de Distribuciones Temperadas . . . . . . . . . . . . . . 77
4.3.2 La Transformada de Fourier de Convoluciones . . . . . . . . . . . . 77
5 Interaccion Kink-Antikink 81
5.1 Nociones Basicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.1.1 Interaccion de dos kinks . . . . . . . . . . . . . . . . . . . . . . . . 86
5.2 Interaccion Kink-Antikink . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.3 Construccion de la Solucion asintotica . . . . . . . . . . . . . . . . . . . . 88
5.4 Analisis del sistema dinamico basico. . . . . . . . . . . . . . . . . . . . . . 109
5.5 Consideraciones graficas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
5.6 El anzatz modificado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Conclusiones 129
Bibliografıa 133
Jessica Yuniver Santana Bejarano
CONTENIDO xi
Indice 134
Tesis de Maestrıa

1Capıtulo
La delta de Dirac.
Este capıtulo tiene como objetivo principal presentar las propiedades basicas de ladelta de Dirac, la cual juega un papel muy importante en las aplicaciones fısicas, tec-nologicas y en diversas areas de las matematicas, como lo son las ecuaciones diferencialesparciales y el analisis funcional, por mencionar algunas. En una primera presentacionpodrıamos decir que la delta de Dirac se describe de manera intuitiva como aquella funcionque se anula en todos los numeros reales excepto en uno y tiene la particularidad de que el“area” comprendida entre su “grafica” y el eje de las abscisas vale uno. Esta descripciones muy precaria, pues se hace referencia al area de una region que no existe (basta intentardibujarla para darnos cuenta de ello); ni siquiera se ha adjudicado un valor a la funcionen el punto donde no se anula. Parece como si estuviesemos asignando un area unitariaa un solo punto.
La funcion delta de Dirac represento durante la primera mitad del siglo XX un reto dela fısica a las matematicas. Habıa algunas disciplinas donde se necesitaba de una funcionque tuviera las propiedades mencionadas; por ejemplo, en mecanica cuantica necesitada deuna “funcion impulso” con propiedades muy especıficas y con poco sustento matematico.
Recordemos la historia de la funcion delta de Dirac o d-funcion. La idea de usarlafue primero dada por Paul Hertz en su artıculo “Mecanica Estadıstica para el Retorno dela Fısica de Weber y Ganz”. Sin embargo, fue un fısico matematico Britanico de 25 anosllamado Paul Adrien Maurice Dirac (1902-1984) quien presento su artıculo “Principiosde Mecanica Cuantica” en el cual introdujo definitivamente “su funcion delta”, ahoraconocida como “delta de Dirac” y simbolizada como δ(t− ξ).
Este objeto matematico fue manejado con gran habilidad por Oliver Heaviside (1850-1925) a finales del siglo XIX y ha sido usado sistematicamente por los fısicos desde 1920,pero para los matematicos carecıa de sustento. Hasta mediados del siglo XX, con la teorıade distribuciones o de las funciones generalizadas de Laurent Schwartz (1917-2001) y dela escuela rusa (I. M. Gelfand, G. E. Shilov, S. L. Sobolev ) no se logro un entendimientocorrecto: la delta de Dirac no es una funcion, sino una distribucion. Pero los fısicos lausaban y la siguen usando exitosamente, Heaviside nunca cometio un error cuando la
1

2 1.1. La funcion de Heaviside
manipulaban en su calculo operacional. Sin embargo, Heaviside fue atacado y muchos desus trabajos no fueron aceptados para su publicacion por los editores de revistas, alegandofalta de rigor matematico.
Hubo que esperar hasta 1950 para que el joven de 35 anos Laurent Schwartz re-solviera la cuestion formulando, ademas, con ello la teorıa de distribuciones, proveyendode metodos eficientes y novedosos al analisis matematico.
Antes de abordar a la delta de Dirac, hablaremos de la funcion de Heaviside, cuyointeres matematico resaltara mas adelante.
1.1 La funcion de Heaviside
La funcion de Heaviside se denota con H(x) y se define como
H(x) =
1 si x > 00 si x < 0
.
Notese que H(−x) = 1−H(x) y que H(a−x) = 1−H(x−a). En la figura 1.1 se muestranlas funciones H(x), H(x− a) y H(a− x).
y
x
(a)
y
xa
(b)
y
xa
(c)
Figura 1.1: (a) H(x); (b) H(x− a); (c) H(a− x)
De la definicion de H(x) se deduce que
H(ax+ b) = H
(x+
b
a
)H(a) +H
(− x− b
a
)H(−a),
para a, b ∈ R.
Si y = f(x) es una funcion, la grafica de la funcion g(x) = H(x−a)f(x−a) se obtienetrasladando la grafica de f(x) como se muestra en la figura 1.2.
La funcion H(x) es muy util en el estudio de funciones con discontinuidades de salto.Por ejemplo, podemos escribir la funcion
Jessica Yuniver Santana Bejarano

1. La delta de Dirac. 3
0
f(x)
y
x
(a) (b)
0
y
xa
Figura 1.2: (a) f(x); (b) H(x− a)f(x− a)
f(x) =
x2 si 0 < x < 1,2 si 1 < x < 2,
−x+ 3 si 2 < x < 4,0 para otros valores de x,
como
f(x) = x2H(x)−H(x− 1)(x2 − 2)−H(x− 2)(x− 1) +H(x− 4)(x− 3).
Ver figura 1.3.
x
f(x)
Figura 1.3: f(x)
De manera similar podemos escribir funciones con un numero infinito de discon-tinuidades de salto. Ası, por ejemplo,
H(senx) =
0 si (2n− 1)π < x < 2nπ,1 si 2nπ < x < (2n+ 1)π,
=∞∑
n=−∞[H(x− 2nπ)−H(x− (2n+ 1)π).]
La funcion H(senx) se muestra en la figura 1.4.
Tesis de Maestrıa

4 1.2. Sucesiones delta
−2π −π π 2π
−1
1
x
H(x)
Figura 1.4: H(senx)
1.2 Sucesiones delta
En esta seccion la definicion y propiedades de la delta de Dirac se establecen a partir delconcepto de sucesion delta. La idea de una sucesion delta es que, aunque una funciondelta no puede existir, podemos encontrar una sucesion de funciones Sn(x) que en ellımite cuando n→∞ satisface la ecuacion
limn→∞
∫ ∞
−∞Sn(x)f(x)dx = f(0) (1.1)
para toda funcion f(x) suficientemente suave en −∞ < x <∞. Notese que la definicionde Sn(x) de ninguna manera implica que el lımite lim
n→∞Sn(x) exista, pues, en general, no
es permitido intercambiar los procesos de lımite y de integracion.
No obstante, cuando esto ocurre escribimos
limm→∞
Sm(x) = δ(x).
Definicion 1.1. Una sucesion de funciones Sn(x) que satisfaga la ecuacion (1.1) y tal
que
∫ ∞
−∞Sn(x)dx = 1 se llama sucesion delta.
En los ejemplos siguientes consideramos algunas sucesiones delta.
Ejemplo 1.1. Consideremos
Sm(x) =senmx
πx, m = 1, 2, . . . (1.2)
Claramente para m fijo, cuando |x| ≫ 1, |Sm(x)| ≪ 1, pues∣∣∣senmx
πx
∣∣∣ 6 1
π |x| → 0 cuando |x| → ∞ para m fijo.
En la figura 1.5 se muestran las graficas de S3(x) y de S6(x).
Recordemos (ver [18]) que ∫ ∞
−∞
senx
πxdx = 1 (1.3)
Jessica Yuniver Santana Bejarano

1. La delta de Dirac. 5
m = 6
m = 3
x
Figura 1.5: Sm(x) =sen (mx)
πx
Cambiando x por mx en (1.3) resulta:∫ ∞
−∞Sm(x)dx = 1 (1.4)
Ahora veamos que Sm(x) es una sucesion delta. Para esto analicemos la integral∫ ∞
−∞
senmx
πxf(x)dx
donde f(x) es diferenciable con f ′(x) continua y acotada.
Observese que para cualquier b > a > 0∫ b
a
Sm(x)dx =1
π
∫ b
a
sen (mx)
xdx =
1
π
∫ bm
am
sen (y)
ydy
y
limm→∞
1
π
∫ bm
am
sen (y)
ydy = 0
De manera similar, para a < b < 0
limm→∞
1
π
∫ bm
am
sen (y)
ydy = 0
Ası, para cualquier ε > 0,
limm→∞
∫ ∞
−∞Sm(x)f(x)dx = lim
m→∞
∫ ε
−ε
sen (mx)
πxf(x)dx
= f(0)
[lim
m→∞
∫ ε
−ε
sen (mx)
πxdx
]
= f(0)
[lim
m→∞
∫ ∞
−∞
sen (mx)
πxdx
]
= f(0)
donde utilizamos la relacion (1.3) y el teorema del valor medio para integrales.
Tesis de Maestrıa

6 1.2. Sucesiones delta
Ejemplo 1.2. Un ejemplo muy importante de sucesion delta es
Sm(x) =1
π
m
1 +m2x2, m = 1, 2, . . . (1.5)
Con frecuencia se interpreta (1.5) como una distribucion de carga continua en unalınea. ver la figura 1.6.
y
x
Figura 1.6: Sm(x) =m
π(1 +m2x2)
Es claro que para m ≫ 1, Sm(x) ≪ 1, excepto por una cima de altura mπ
en unavecindad de x = 0.
La carga total rm(x) a la izquierda del punto x es
rm(x) =
∫ x
−∞Sm(u)du =
1
2+
1
πtan−1(mx),
de donde se obtiene que
∫ ∞
−∞Sm(u)du = lim
x→∞rm(x) = 1 para toda m ∈ N. (1.6)
La grafica de la distribucion de carga acumulativa se muestra en la figura 1.7.
Figura 1.7: rm(x) =1
2+
1
πtan−1(mx)
Mas aun,
limm→∞
Sm(x) =
0 si x 6= 0,∞ si x = 0;
Jessica Yuniver Santana Bejarano

1. La delta de Dirac. 7
limm→∞
rm(x) =
0 si x < 0,12, si x = 0
1 si x > 0.
Esto significa que, a medida de que m crece, la carga se acumula en el origen. Ası, elcomportamiento de Sm(x) cuando m → ∞ “se asemeja” a la delta de Dirac y no es unafuncion ordinaria.
La distribucion acumulativa de carga correspondiente, la cual viene de limm→∞
rm(x),
es la funcion de Heaviside H(x). La sucesion Sm(x) sera una sucesion delta si podemosprobar que satisface la propiedad
limm→∞
∫ ∞
−∞f(x)Sm(x)dx = f(0), (1.7)
para una funcion f(x) la cual es acotada, integrable y continua en x = 0.
La prueba se sigue al escribir la ecuacion (1.7) como:
∫ ∞
−∞f(x)Sm(x)dx =
∫ ∞
−∞f(0)Sm(x)dx+
∫ ∞
−∞g(x)Sm(x)dx (1.8)
donde g(x) = f(x)− f(0). Por (1.6) tenemos
∫ ∞
−∞f(x)Sm(x)dx = f(0) +
∫ ∞
−∞g(x)Sm(x)dx
Ası, la propiedad se satisface si probamos que
limm→∞
∫ ∞
−∞g(x)Smdx = 0 (1.9)
Para ello, sea A un numero positivo; entonces
∫ ∞
−∞g(x)Sm(x)dx =
∫ −A
−∞g(x)Sm(x)dx+
∫ ∞
A
g(x)Sm(x)dx+
∫ A
−A
g(x)Sm(x)dx
= I1 + I2 + I3
Para I3 denotamos por M(A) al maximo de |g| en −A 6 x 6 A. Entonces,
|I3| 6∫ A
−A
|g(x)|Sm(x) dx 6 M(A)
∫ A
−A
m dx
π(1 +m2x2)
= M(A)
[2
πtan−1(mA)
]6 M(A).
Tesis de Maestrıa

8 1.3. Sucesiones de Heaviside
Como g(0) = 0 y g(x) es continua en x = 0, limA→0
M(A) = 0. Consecuentemente, para
cualquier ε > 0 existe un numero real A suficientemente pequeno tal que |I3| < ε2, lo cual
es valido independientemente de M .
Con el numero A como lo elegimos, resta mostrar que |I1 + I2| es pequeno para msuficientemente grande. Como f(x) es acotada y |g(x)| < |f(x)| + |f(0)|, se sigue que|g(x)| esta acotada en −∞ < x <∞, digamos |g(x)| < b. Entonces
|I1 + I2| 6 b
[∫ −A
−∞Sm(x)dx+
∫ ∞
A
Sm(x)dx
]= b
(1− 2
πtan−1(mA)
)
Con A fijo, limm→∞
2
πtan−1(mA) = 1. Lo que significa que podemos encontrar N tal
que
b
[1− 2
πtan−1(mA)
]6ε
2, m > N.
Con esta eleccion de N , tenemos∣∣∣∣∫ ∞
−∞g(x)Sm(x)dx
∣∣∣∣ 6 |I1 + I2 + I3| 6 |I1 + I2|+ |I3| < ε
y se sigue (1.9). Lo cual completa la prueba.
1.3 Sucesiones de Heaviside
Finalmente, mencionaremos que tambien podemos definir una sucesion de Heaviside.
Definicion 1.2. Una sucesion hm(x) es llamada una sucesion de Heaviside si
limm→∞
∫ ∞
−∞hm(x)f(x)dx =
∫ ∞
0
f(x)dx = 〈H(x), f(x)〉
para toda f(x) suficientemente suave en −∞ < x <∞ y el sımbolo 〈φ(x), ϕ(x)〉 se utilizapara denotar 〈φ(x), ϕ(x)〉 =
∫∞−∞ φ(x)ϕ(x)dx.
Ejemplo 1.3. Consideremos la sucesion
hm(x) =
1 si x >1
2m
mx+1
2si − 1
2m6 x 6
1
2m
0 si x < − 1
2m
.
En la figura 1.8 se muestra la grafica de h2(x).
Jessica Yuniver Santana Bejarano

1. La delta de Dirac. 9
x
Figura 1.8: hm(x) para m = 2
Para probar que es una sucesion de Heaviside, observese que para f(x) suficientementesuave
∫ ∞
−∞hm(x)f(x)dx =
∫ − 12m
−∞hm(x)f(x)dx+
∫ 12m
− 12m
hm(x)f(x)dx
+
∫ ∞
12m
hm(x)f(x)dx
=
∫ 12m
− 12m
(mx+
1
2
)f(x)dx+
∫ ∞
12m
f(x)dx
Cuando m→∞ tenemos:
limm→∞
∫ ∞
−∞hm(x)f(x)dx =
∫ ∞
0
f(x)dx = 〈H(x), f(x)〉 .
Finalmente, haciendo alusion al tema que desarrollaremos en los siguientes capıtulosexploraremos algunas propiedades de la delta de Dirac y encontraremos que es una valiosaherramienta, por ejemplo, en analisis de Fourier. Su descubrimiento, como ya men-cionamos, estimulo a los matematicos a investigar que es lo que tal expresion, que enteorıa contiene infinita energıa, realmente significa. Rapidamente fue notorio que existıanotras, tales como las funciones signo, la ya conocida funcion escalon de Heaviside, entreotras, con propiedades similares. Algunas operaciones de las funciones no son inmediatas,por ejemplo no podemos encontrar una derivada directamente con las herramientas yaconocidas; ası, todas ellas tienen derivada bien definida si esta se define apropiadamente.
Ejemplo 1.4. La derivada de la delta de Dirac δ, la cual analizaremos mas adelante.Comenzaremos planteandonos la siguiente pregunta: ¿la funcion δ tiene una derivada?Claramente, intentando encontrar su derivada, rapidamente entramos en conflicto; paraempezar ¿como debemos entender a este objeto?; pues, como mencionamos anteriormente,no se satisfacen las propiedades de una funcion. Ası, la pregunta que dejamos abierta porun momento es:
¿La funcion δ tiene una derivada en algun sentido definida en todo punto?
Si a la funcion δ la vemos como una funcion en el sentido ordinario con su definicionanalıtica ya dada, entonces no podemos encontrar una derivada para ella. Existe, sin
Tesis de Maestrıa

10 1.3. Sucesiones de Heaviside
embargo, una manera totalmente diferente de ver a la funcion δ, la cual es llamada funciongeneralizada o distribucion. Estos conceptos seran expuestos en los siguientes capıtulos,donde daremos respuesta a esta pregunta.
Jessica Yuniver Santana Bejarano

2Capıtulo
Introduccion a la Teorıa de
Distribuciones
Este capıtulo tiene como principal objetivo el presentar las nociones basicas de lateorıa de distribuciones, ademas de establecer la notacion y terminologıa que utilizaremosen el resto de este trabajo.
La idea es la de generalizar la nocion de funcion que conocemos en Rn y discutir sus
principales propiedades.
2.1 Notacion y terminologıa
Sea Rn el espacio real n-dimensional. Si (x1, . . . , xn) son las coordenadas de un punto
P ∈ Rn, entonces, su norma Euclidiana sera denotada por ‖x‖ =
[n∑
j=1
x2j
] 12
.
Sea Nn el conjunto de todas las n-adas de enteros no-negativos, α = (α1, . . . , αn), el
cual es llamado multi-ındice de orden n; entonces definimos:
|α| = α1 + α2 + . . .+ αn, xα = xα11 x
α22 · · · xαn
n .
Si α, β son multi-ındices definimos α + β = (α1 + β1, · · · , αn + βn) . La notacion α 6 βsignifica que αj 6 βj, 1 6 j 6 n. Ademas, α! = α1! · · ·αn!, ası como tambien
(αβ
)=
α!
β! (α− β)!=
(α1
β1
)(α2
β2
)· · ·(αn
βn
)
Si x ∈ Rn y α es un multi-ındice entonces un polinomio en n variables (x1, . . . , xn),
de grado 6 m puede escribirse como
α (x) =∑
|α|6m
aαxα.
Los coeficientes aα pueden ser numeros complejos, en cuyo caso α se dice un polinomio concoeficientes constantes; o funciones a valores complejos, en cuyo caso α sera un polinomio
11

12 2.1. Notacion y terminologıa
con coeficientes variables.
Las derivadas parciales seran denotadas usando el operador
Dα =∂|α|
∂xα11 ∂x
α22 · · · ∂xαn
n
=∂α1+α2+···+αn
∂xα11 ∂x
α22 · · · ∂xαn
n
= Dα11 Dα2
2 · · ·Dαnn (2.1)
donde Dkr
j =∂kr
∂xkr
j
, j = 1, 2, . . . , n. Para el caso 1-dimensional Dα se reduce ad
dα. Mas
aun, si cualquier componente de α es cero, la diferenciacion con respecto a la correspon-diente variable es omitida.
Ejemplo 2.1. En R3, con α = (3, 0, 4), tenemos
Dα =∂7
∂x31∂x
43
= D31D
43.
De acuerdo a estas notaciones, un operador diferencial parcial de orden 6 m puedeser escrito como sigue:
L =∑
|α|6m
aα(x)Dα. (2.2)
Ejemplo 2.2. Cuando n = 1, tenemos el operador diferencial ordinario
L = aα(x)∂α
∂xα+ aα−1(x)
∂α−1
∂xα−11
+ · · ·+ a0(x).
Ejemplo 2.3. El operador diferencial parcial de segundo orden en R2 es:
L =∑
|α|<2
aα(x)Dα =∑
|α|=0
aα(x)Dα +∑
|α|=1
aα(x)Dα +∑
|α|=2
aα(x)Dα
= a2,0(x)∂2
∂x21
+ a1,1(x)∂2
∂x1∂x2
+ a0,2(x)∂2
∂x22
+ a1,0(x)∂
∂x1
+ a0,1(x)∂
∂x2
+ a0,0(x).
Definicion 2.1. Sea Ω un conjunto abierto en Rn. Denotamos por Cm(Ω), donde m es un
entero no-negativo, al espacio vectorial sobre C de todas las funciones a valores complejosdefinidas en Ω que tienen derivadas parciales continuas de orden 6 m. Denotamos porC∞(Ω) al espacio de todas las funciones a valores complejos definidas en Ω que tienenderivadas parciales de todos los ordenes.
Claramente,
C∞(Ω) =⋂
m>0
Cm(Ω)
Los elementos de C∞(Ω) son llamadas funciones continuas infinitamente diferencia-bles o funciones C∞ en Ω.
Jessica Yuniver Santana Bejarano

2. Introduccion a la Teorıa de Distribuciones 13
Ahora, podemos establecer las formulas de Taylor y de Leibniz:
Formula de Taylor: Para f ∈ Ck+1(U), con U abierto, x ∈ U , n > 1, α multi-ındice,x0 ∈ U tenemos:
f(x) =∑
|α|6m
(x− x0)α
α!∂αf(x0) +Rm(x),
donde Rm(x) es el termino residual.
Formula de Leibniz: Sea ∂α un operador diferencial parcial, u y v dos funciones tales queu, v ∈ C∞(Ω). Entonces:
∂α(uv) =∑
β6α
α!
(α− β)!β!∂βu∂α−βv.
Usaremos la siguiente notacion para la integral (en el sentido de Lebesgue) de unafuncion f(x) = f(x1, . . . , xn) sobre una region n-dimensional R:
∫· · ·∫
R
f(x1, . . . , xn)dx1dx2 · · · dxn =
∫
R
f(x)dx (2.3)
donde dx = dx1dx2 · · · dxn. Generalmente, las funciones que consideraremos seran fun-ciones con valores escalares (reales o complejos) de n variables reales, es decir, aplicacionesde R
n en R (o en C); en otro caso se indicara en su momento.
Las integrales se entienden en el sentido de Lebesgue, de manera que, en particular, soniguales para dos funciones iguales casi donde quiera (es decir, iguales salvo, posiblemente,en un conjunto de medida cero).
Definicion 2.2. Una funcion f(x) es localmente integrable en Rn si
∫R|f(x)|dx existe
para toda region acotada R en Rn.
Si f es integrable en Rn decimos que f ∈ L1(Rn), donde
L1(Rn) =
[f ] : f es medible y
∫|f(x)| dµ <∞
.
Aquı, [f ] = g : f = g µ-casi en todas partes y
‖f‖1 =
∫
Rn
|f |dµ.
Si f es localmente integrable en Rn escribimos f ∈ L1
loc(Rn).
La clase de funciones localmente integrables es bastante extensa. Todas las funcionescontinuas a pedazos son localmente integrables. Algunas funciones que son infinitas, tales
como1
rm, m < n, donde r = (x2
1 + · · ·+ x2n)1/2 son tambien localmente integrables.
Es claro que una funcion integrable es localmente integrable, pero la recıproca noes cierta. De hecho, por ejemplo, la funcion f(x) = x2 es localmente integrable pero
Tesis de Maestrıa

14 2.2. Funciones de prueba
no integrable. Tambien, la funcion f(x) = x−1 no es localmente integrable, pues no esintegrable en ningun intervalo que contenga el origen.
Otro concepto que juega un papel crucial en la teorıa de distribuciones es el soportede una funcion, definido como sigue:
Definicion 2.3. El soporte de una funcion f(x) es la cerradura del conjunto de todos lospuntos x tales que f(x) 6= 0.
Denotaremos el soporte de una funcion f por sop (f).
Ejemplo 2.4. Para f(x) = senx, x ∈ R, el soporte de f(x) consiste de toda la recta real,no obstante que senx se anula en x = nπ. Si sop (f) es un conjunto acotado, entonces sedice que f tiene soporte compacto.
Ejemplo 2.5. El soporte de
f(x) =
0 si −∞ 6 x 6 −1x+ 1 si −1 < x < 01− x si 0 6 x < 1
0 si 1 6 x <∞,
es compacto. (ver figura 2.1).
y
x
Figura 2.1: f(x)
El conjunto complementario del soporte de f(x) es el conjunto de los puntos x delespacio tales que f(x) es identicamente nula en un entorno del punto, el cual es abierto.
Si K es el soporte, la pertenencia x0 ∈ K significa que todo entorno de x0 contieneun punto x en el cual f(x) 6= 0.
Si F es un conjunto cerrado la inclusion K ⊂ F equivale a la afirmacion “f(x) es nulofuera de F”.
2.2 Funciones de prueba
Definiremos ahora los espacios basicos de la teorıa:
Jessica Yuniver Santana Bejarano

2. Introduccion a la Teorıa de Distribuciones 15
Espacio D0 : Es el espacio de las funciones complejas ϕ(x) definidas en el espacio realn-dimensional R
n, continuas y de soporte compacto.
Espacio Dm : Es el espacio de funciones complejas ϕ(x) definidas en Rn con derivadas
parciales continuas hasta orden m y de soporte compacto.
Observemos que una cantidad operacional tal como δ(x) adquiere sentido solo si esmultiplicada por una funcion auxiliar suficientemente suave y despues es integrada sobretodo el espacio. Este punto de vista tambien se toma como la base para la definicionde una funcion generalizada arbitraria. De acuerdo a esto, consideremos el espacio Dque consiste de funciones a valores reales ϕ(x) = ϕ(x1, x2, . . . , xn), tal que se satisface losiguiente:
1. ϕ(x) es una funcion infinitamente diferenciable definida en todo punto de Rn. Esto
significa que Dαϕ existe para todos los multi-ındices α. Tal funcion es tambienllamada una funcion C∞.
2. Existe un numero A tal que ϕ(x) se anula para r > A. Esto significa que ϕ(x) tienesoporte compacto.
Definicion 2.4. Las funciones del espacio D se llaman funciones de prueba.
Si λ y µ son dos escalares y ϕ1, ϕ2 ∈ D es claro que λϕ1 + µϕ2 ∈ D; es decir, elconjunto D de las funciones de base es un espacio vectorial sobre C.
A continuacion, y con el objetivo de mostrar que el espacio D es no trivial, mostrare-mos algunas funciones en D.
Ejemplo 2.6. (a) Sea n = 1 y f : R→ R tal que
f(t) =
e−
1t si t > 0
0 si t 6 0,
La grafica de f(t) se muestra en la figura 2.2.
t
f(t)
Figura 2.2: f(t)
Claramente f es C∞, ademas f y todas sus derivadas estan acotadas.
Tesis de Maestrıa

16 2.2. Funciones de prueba
En efecto,
limt→0+
e−1t
t= lim
t→0+
1
te1t
Pero,
te1t = t
[1 +
1
t+
1
2!t2+
1
3!t3+ · · ·
]=
[t+ 1 +
1
2!t+
1
3!t2+ · · ·
]
y esto tiende a ∞ cuando t→ 0+. Ası, limt→0+
e−1t
t= 0. Por lo que
f ′(t) =
1t2e−
1t si t > 0
0 si t 6 0.
De hecho todas las derivadas de f son de la forma∑N
j=1cj
tje−
1t para N <∞. Como para
toda x se tiene que
ex = 1 + x+x2
2!+ · · ·+ xn
n!+ · · · > xn
n!entonces,
xn
n!< ex ∀n ∈ N, x > 0, o e−xxn < n! ∀n ∈ N, x > 0.
Tomando x = 1t, se sigue que 1
tne−
1t < n! ∀t > 0, ∀n ∈ N.
Por lo tanto f y todas sus derivadas estan acotadas.
Ahora, definamos ϕ : R→ R tal que ϕ(x) = f(1 + x)f(1− x). Entonces ϕ(x) = 0⇔|x| > 1.
Ası,
ϕ(x) =
e− 2
1−x2 si |x| < 10 si |x| > 1
,
y sopϕ(x) = [−1, 1] . Entonces, ϕ ∈ D.De estas mismas consideraciones se sigue que si definimos ω(x; a) mediante
ω(x; a) =
e− a2
a2−|x|2 si |x| < a0 si |x| > a
(2.4)
entonces sopω(x; a) = [−a, a] y ω(x; a) ∈ D(b) Tambien podemos tomar φ : R→ R tal que
φ(x) =
e− 2
1−|x|2 si |x| < 10 si |x| > 1
,
Jessica Yuniver Santana Bejarano

2. Introduccion a la Teorıa de Distribuciones 17
y, entonces, sop (φ) = B1(0), por lo que φ ∈ D.Entonces, para la funcion Θ : R
n → R tal que
Θ(x) = f(1− |x|2) =
e− 1
1−|x|2 si |x| < 10 si |x| > 1
,
tenemos que Θ ∈ D.
Tomando a = 1 en la funcion ω(x; a) y multiplicando por el factor de normalizacion
c =
(∫ 1
−1
e− 1
1−|x|2 dx
)−1
, podemos construir la funcion
ω(x) := ω(x, 1) =
ce
− 1
1−|x|2 si |x| < 1,0 si |x| > 1,
.
Notese que en un punto de la frontera del soporte , por ejemplo x = 1, son nulas todaslas derivadas de ω(x); la serie de Taylor en x− 1, tiene todos sus terminos nulos pero norepresenta a la funcion en ningun entorno de a.
Este hecho, es evidentemente general: todas las derivadas son nulas en todo punto dela frontera puesto que son continuas y nulas en el exterior del soporte, pero la serie deTaylor tiene todos sus terminos nulos y no representa a la funcion en ningun entorno deeste punto (puesto que todo entorno contiene un punto en el cual la funcion es no nula).
A partir de la funcion ω, podemos construir, para cada ε > 0, la funcion ωε dada por
ωε(x) = cεω(xε
)=
cεe
− ε2
ε2−|x|2 si |x| < ε,0 si |x| > ε,
con las propiedades:∫
R
ωε(x)dx = 1, sop (ωε) = A = |x| 6 ε, c−1ε =
∫
|x|6ε
e− ε2
ε2−|x|2 dx.
Tambien podemos formar una sucesion delta a partir de esta funcion. Claramente lasucesion
ωm(x) =
cme
− 1
1−m2|x|2 si |x| < 1m,
0 si |x| > 1m,
donde
c−1m =
∫
|x|6 1m
e− 1
1−m2|x|2 dx
es una sucesion delta y se puede mostrar usando los metodos descritos en la primeraseccion.
Tesis de Maestrıa

18 2.2. Funciones de prueba
Las siguientes propiedades de las funciones de prueba son faciles de probar; algunasde ellas ya han sido mencionadas:
1. Si ϕ1 y ϕ2 son elementos de D, entonces c1ϕ1+c2ϕ2 pertenece a D, donde c1, c2 ∈ R.Ası, D es un espacio vectorial.
2. Si ϕ ∈ D entonces Dkϕ ∈ D
3. Para f(x) ∈ C∞ y ϕ ∈ D, fϕ ∈ D
4. Si ϕ(x1, x2, . . . , xm) es una funcion de prueba m-dimensional y ψ(xm+1, . . . , xn) esuna funcion de prueba (n−m)-dimensional, entonces ϕψ es una funcion de pruebaen las variables x1, . . . , xn.
La definicion de D no requiere que todos sus elementos tengan el mismo soporte.
Ejemplo 2.7. Las funciones en R, definidas mediante
ω(x) =
e− a2
a2−|x|2 si |x| < a,0 si |x| > a,
y
ω(x− 3) =
e− a2
a2−|x−3| si |x− 3| < a,0 si |x− 3| > a,
ambas son miembros de D sin embargo, sus soportes son:
sopω(x) = (−1, 1) y sopω(x− 3) = (2, 4).
A continuacion revisamos las nociones basicas de convergencia que necesitaremos eneste espacio.
Definicion 2.5. Una sucesion ϕm, m = 1, 2, . . . donde ϕm ∈ D, converge a ϕ0 si sesatisfacen las siguientes condiciones:
1. Las ϕm y ϕ0 se anulan fuera de una region comun.
2. Dαϕm → Dαϕ0 uniformemente cuando m→∞ para todo multi-ındice α.
Claramente ϕ0 ∈ D y por tanto D es cerrado (o es completo ) con respecto a estadefinicion de convergencia. Para el caso especial ϕ0 = 0, la sucesion ϕm se llamasucesion nula.
Ejemplo 2.8. La sucesion 1
mω(x, a)
Jessica Yuniver Santana Bejarano

2. Introduccion a la Teorıa de Distribuciones 19
donde ω(x, a) se define en (2.4), es una sucesion nula. Sin embargo, la sucesion
1mω(
xm, a)
no es una sucesion convergente, porque el soporte de la funcion ω( xm, a) es la esfera con
radio ma, el cual es diferente para diferentes valores de m.
Ademas del espacio D de funciones de prueba, usaremos ciertos subespacios de D.Para una region R en R
n, el espacio DR contiene a todas aquellas funciones cuyo soportese encuentra en R, esto es,
DR = ϕ : ϕ ∈ D, sop (ϕ) ⊂ R
Claramente es un subespacio de D.
Ejemplo 2.9. Dx y Dy son dos subespacios uno-dimensionales de funciones de pruebaϕ(x), ϕ(y) y estan contenidos en Dxy, el cual es el subespacio de funciones de pruebaϕ(x, y) ∈ R
2.
La convergencia en DR se define de la misma manera que en D.
2.3 Funcionales lineales
Definicion 2.6. Un funcional lineal T en D es una operacion por medio de la cualasignaremos a toda funcion de prueba ϕ(x) un numero real que denotaremos 〈T, ϕ〉, talque
〈T, c1ϕ1 + c2ϕ2〉 = c1 〈T, ϕ1〉+ c2 〈T, ϕ2〉 (2.5)
para ϕ1, ϕ2 ∈ D y c1, c2 ∈ R.
Se sigue que 〈T, 0〉 = 0 y
⟨T,
m∑
j=1
cjϕj
⟩=
m∑
j=1
cj 〈T, ϕj〉 , donde cj ∈ R.
El siguiente concepto es referente a la continuidad de los funcionales lineales.
Definicion 2.7. Un funcional lineal en D es continuo si y solamente si, para cada sucesionϕm ∈ D, la sucesion de numeros 〈T, ϕm〉 converge a 〈T, ϕ〉 cuando ϕm → ϕ. Ası,
limm→∞
〈T, ϕm〉 =⟨T, lim
m→∞ϕm
⟩. (2.6)
Ahora, tenemos las herramientas necesarias para definir una distribucion.
Definicion 2.8. Una distribucion en U es una funcional lineal continua T : D(U)→ C,con la continuidad definida en D(U).
Tesis de Maestrıa

20 2.4. Distribuciones regulares
2.4 Distribuciones regulares
Un tipo de distribuciones es aquel que consiste de las generadas por funciones localmenteintegrables, como se establece en el siguiente resultado.
Teorema 2.1. Sea U ⊂ Rn abierto y f ∈ L1
loc(U). Entonces f se puede identificar conla distribucion en U
f : D(U)→ C
mediante la formula
〈f, ϕ〉 =
∫
Rn
f(x)ϕ(x)dx. (2.7)
Demostracion: Claramente 〈f, ϕ〉 es lineal. Ahora, probemos la continuidad. Enefecto, para cada K ⊂ U tal que K es compacto y cada ϕj → ϕ0 en D(K) tendremos:
|〈f, ϕj〉 − 〈f, ϕ0〉| =
∣∣∣∣∫
Rn
f(x)ϕj(x)dx−∫
Rn
f(x)ϕ0(x)dx
∣∣∣∣
=
∣∣∣∣∫
Rn
f(x) [ϕj(x)− ϕ0(x)]dx
∣∣∣∣
6
∫
Rn
|f(x)| |ϕj − ϕ0(x)|dx
6 ‖ϕj(x)− ϕ0(x)‖∞∫
K
|f(x)|dx→ 0,
cuando j →∞ (pues ‖∂αϕj − ∂αϕ0‖∞ → 0, cuando j →∞).
Ası, si la sucesion ϕm converge a cero, entonces 〈f, ϕm〉 converge a cero. De aquıque sea continua. Por lo tanto, 〈f, ϕ〉 es una distribucion.
Una distribucion definida mediante (2.7) se llama regular. Si una distribucion no esregular, se llama singular.
Dos casos particulares de distribuciones regulares son los siguientes:
a) La distribucion cero en D tiene la siguiente propiedad:
〈0, ϕ〉 = 0, ϕ ∈ D.
b) Si c es constante entonces c ∈ L1loc(U) y genera la distribucion:
〈c, ϕ〉 =
∫
Rn
cϕ(x)dx = c
∫
Rn
ϕ(x)dx.
Jessica Yuniver Santana Bejarano

2. Introduccion a la Teorıa de Distribuciones 21
Las distribuciones regulares tambien pueden definirse por medio de operadores diferen-ciales parciales. Si f(x) ∈ L1
loc, podemos definir una distribucion como:
〈f, ϕ〉 =
∫
Rn
f(x)Dαϕ(x)dx, ϕ ∈ D.
2.5 El Espacio D′
El conjunto de todas las distribuciones en D se denotara D′.
Cuando U sea un abierto de Rn entonces D′(U) sera el espacio de distribuciones en
el abierto U de Rn o bien D(U) es el espacio de funciones de prueba sobre U .
Cuando U = Rn entonces solo denotaremos a los espacios como D′, D, L1
loc, etc.
Las distribuciones T1 y T2 dan lugar a una nueva distribucion: T = c1T1 + c2T2 paratoda c1, c2 ∈ R tal que
〈T, ϕ〉 = 〈c1T1 + c2T2, ϕ〉 = c1 〈T1, ϕ〉+ c2 〈T2, ϕ〉 .
Ası, D′ es un espacio lineal. D′ es el espacio dual de D, es un espacio mas grandeque D y forma una generalizacion de la clase de funciones localmente integrables porque contiene funciones tales como δ(x) que no son localmente integrables. Por tal razonlas distribuciones son llamadas funciones generalizadas o simbolicas. Utilizaremos losterminos “distribucion ” y “funcion generalizada”, sin distincion alguna.
Otra idea basica en la teorıa de distribuciones se incluye en el siguiente teorema.
Teorema 2.2. Dos funciones continuas que producen la misma distribucion regular sonidenticas.
Demostracion: El teorema se sigue de la formula (2.7). Sean f, g ∈ C. Para todaϕ ∈ D se tiene que ∫
Rn
f(x)ϕ(x)dx =
∫
Rn
g(x)ϕ(x)dx,
o bien ∫
Rn
[f(x)− g(x)]ϕ(x)dx = 0.
Sea h(x) = f(x)− g(x) entonces
〈h, ϕ〉 =
∫
Rn
h(x)ϕ(x)dx = 0.
Como la unica funcion continua para la cual 〈h, ϕ〉 = 0 para toda ϕ ∈ D es h ≡ 0entonces f(x) = h(x), x ∈ R
n.
Tesis de Maestrıa

22 2.5. El Espacio D′
Para funciones localmente integrables este teorema no es valido, porque podemosalterar los valores de f(x) en un conjunto de medida cero sin alterar los valores de ladistribucion regular asociada con f . Sin embargo, si f(x) y g(x) son funciones localmenteintegrables y son iguales casi en todas partes, entonces generan la misma distribucion, ytenemos:
〈f, ϕ〉 = 〈g, ϕ〉 ϕ ∈ D
Mas aun, tenemos el siguiente resultado:
Proposicion 2.1. Sean f, g ∈ L1loc. Entonces, f = g casi en todas partes si y solamente
si 〈f, g〉 = 〈g, ϕ〉.
Demostracion: Si f = g casi en todas partes y ϕ ∈ D entonces:
〈f, g〉 =
∫
Rn
f(x)ϕ(x)dx =
∫
Rn
g(x)ϕ(x)dx = 〈g, ϕ〉 , para toda ϕ ∈ D.
Ahora, supongamos que 〈f, ϕ〉 = 〈g, ϕ〉 para toda ϕ ∈ D, es decir,∫
Rn
f(x)ϕ(x)dx =
∫
Rn
g(x)ϕ(x)dx para toda ϕ ∈ D
o bien, ∫
Rn
[f(x)− g(x)]ϕ(x)dx = 0.
Consideremos ϕt(y − x) =1
tϕ
(y − xt
)con ϕ ∈ L1 y
∫∞−∞ ϕ(x)dx = 1, |ϕ(x)| 6
C (1 + |x|)−n−ε . Entonces, existe ε > 0 tal que
(h ∗ ϕt) (x)→ h(x), t→ 0
donde h = (f − g) (x) ∈ L1loc(R
n).
Ası,
0 =
∫
Rn
(f − g) (x)ϕt (y − x)dx =
∫
Rn
h(x)ϕt(y − x)dx→ h(y) = (f − g) (y),
casi en todas partes. Por lo tanto, f = g casi en todas partes.
Este resultado nos lleva al siguiente concepto:
Definicion 2.9. Sea U ⊂ Rn abierto y sean F, G ∈ D′(U). Supongamos que V ⊂ U ,
V abierto. Diremos que F = G en V si y solamente si para toda ϕ ∈ D(V ) se tieneque 〈F, ϕ〉 = 〈G,ϕ〉. Si F, G ∈ L1
loc(U) y 〈F, ϕ〉 = 〈G,ϕ〉 para toda ϕ ∈ D(V ) entoncesF = G casi en todas partes sobre V .
Lema 2.1. Sea K ⊂ Rn un compacto y Ωjkj=1 un cubrimiento finito por abiertos de
K. Entonces, existen funciones ϕjkj=1 ⊂ D tales que 0 6 ϕj 6 1 ∀j = 1, 2, . . . , k;
Jessica Yuniver Santana Bejarano

2. Introduccion a la Teorıa de Distribuciones 23
sopϕj ⊂ Ωj j = 1, . . . , k y∑k
j=1 ϕj = 1 en una vecindad de K. La familia ϕjkj=1 se
llama particion C∞ de la unidad subordinada a la cubierta Ωjkj=1.
Demostracion: Por hipotesis, sabemos que K ⊂ ⋃kj=1 Ωj. Sea x ∈ K entonces, existe
j ∈ 1, . . . , k tal que x ∈ Ωj. Existe una vecindad compacta Kx de x tal que
x ∈ Kx ⊂ Kx ⊂ Ωj,
donde K denota el interior de K. Por lo que, K ⊂ ⋃x∈K K. Entonces, existen
Kx1 , . . . , Kxstales que
K ⊂s⋃
j=1
Kxj⊂
k⋃
j=1
Ωj con Kj ⊂ Ωj.
Por el lema C∞ de Urysohn (para una demostracion de este lema consultar [9]) existenfunciones χjkj=1 ⊂ D tal que 0 6 χj 6 1, sopχj ⊂ Ωj y χj = 1 en Kj.
Definamos
ϕ1 = χ1,
ϕ2 = χ2 (1− χ1) ,...
ϕj = χj (1− χ1) (1− χ2) · · · (1− χj−1) , 2 6 j 6 k.
Claramente, 0 6 ϕj 6 1 j = 1, . . . , k
sop (ϕ) ⊂ sop (χj) ⊂ Ωj j = 1, . . . , k.
Ahora, ϕ1 = 1 en K1, mostremos que ϕ1 + ϕ2 = 1 en K1 ∪K2.
Sea x ∈ K1 ∪K2.
Si x ∈ K1 entonces
ϕ1(x) = 1,
ϕ2(x) = ψ2(x) [1− ϕ1(x)] = 0.
Por lo tanto, ϕ1(x) + ϕ2(x) = 1.Si x ∈ K2 entonces
ϕ1(x) = 0
ϕ2(x) = ψ2(x) [1− ϕ1(x)] = 1
Supongamos que ϕ1 + ϕ2 + · · ·+ ϕk = 1 en K1 ∪K2 ∪ · · · ∪Kk.
Probaremos que ϕ1 + ϕ2 + · · ·+ ϕk + ϕk+1 = 1 en⋃k+1
j=1 Kj.
Tesis de Maestrıa

24 2.6. Ejemplos.
Sea x ∈ ⋃k+1j=1 Kj. Entonces x ∈ Kj para algun j ∈ 1, 2, . . . k + 1.
Si x ∈ Kk, entonces
ϕ1(x) = 0,
ϕ2(x) = ψ2(x) [1− ϕ1(x)] = 0,
ϕ3(x) = ψ3(x) [1− ϕ1(x)] [1− ϕ2(x)] = 0,...
ϕk(x) = ψk(x) [1− ϕ1(x)] [1− ϕ2(x)] · · · [1− ϕk−1(x)] = 1,
ϕk+1(x) = ψk+1(x) [1− ϕ1(x)] [1− ϕ2(x)] · · · [1− ϕk−1(x)] [1− ϕk(x)] = 0.
Por lo tanto, ϕ1 + ϕ2 + · · ·+ ϕk + ϕk+1 = 1 en⋃k+1
j=1 Kj.
Para terminar esta seccion, presentamos el siguiente resultado cuya demostracion sesigue del Lema 2.1:
Proposicion 2.2. Sea Vα : α ∈ I la familia de abiertos de U y sea V =⋃
α∈I Vα. SeanF,G ∈ D′(U) tal que F = G en Vα para toda α ∈ I. Entonces, F = G en V .
2.6 Ejemplos.
En los ejemplos 2.10 y 2.11 se hace referencia a los espacios Lp, que consisten de todaslas clases de equivalencias de funciones medibles f para las cuales |f |p tiene integral deLebesgue finita, siendo dos funciones equivalentes si son iguales casi donde quiera. A esteespacio se le dota de la norma
‖f‖p =
[∫|f |pdµ
] 1p
.
Ejemplo 2.10. Toda f ∈ Lp(U) =[f ] :
∫|f |pdx <∞
, 1 6 p 6 ∞; Determina un
elemento en D′(U). Pues sabemos que Lp(U) ⊂ L1loc(U) ⊂ D′(U).
Ejemplo 2.11. La convergencia en Lp implica convergencia en D′. En efecto, si fn → fen Lp, 1 6 p <∞, mostremos que
〈fn, ϕ〉 → 〈f, ϕ〉 , cuando n→∞ en D′.
Jessica Yuniver Santana Bejarano

2. Introduccion a la Teorıa de Distribuciones 25
Sea ϕ ∈ D, ası
|〈fn, ϕ〉 − 〈f, ϕ〉| =
∣∣∣∣∫
Rn
fn(x)ϕ(x)dx−∫
Rn
f(x)ϕ(x)dx
∣∣∣∣
=
∣∣∣∣∫
Rn
[fn(x)− f(x)]ϕ(x)dx
∣∣∣∣
6
∫
sop ϕ
|fn(x)− f(x)| |ϕ(x)|dx
6 ‖fn(x)− f(x)‖p ‖ϕ(x)‖q → 0 cuando n→∞.
Por lo tanto, 〈fn, ϕ〉 → 〈f, ϕ〉 en D′
Ejemplo 2.12. La distribucion de Heaviside en R.
〈HR, ϕ〉 =
∫
R
ϕ(x)dx, (2.8)
ya estudiada en la seccion 1.1 del capıtulo 1.Para R, (2.8) es:
〈H,ϕ〉 =
∫ ∞
0
ϕ(x)dx. (2.9)
Como H(x) es una funcion continua a pedazos, es una distribucion regular.
Ejemplo 2.13. La distribucion delta de Dirac en Rn es
〈δ(x− ξ), ϕ(x)〉 = ϕ(ξ), (2.10)
para ξ fijo en Rn. Claramente esta funcional es lineal. Para probar la continuidad ob-
servemos que
limm→∞
〈δ, ϕm〉 = limm→∞
ϕm(ξ).
Sin embargo, si ϕm(x) → 0 entonces ϕm(ξ) → 0. Ası, tenemos la continuidad. De aquıque δ sea una distribucion.
Mas generalmente, tenemos el siguiente resultado:
Teorema 2.3. Sea x0 ∈ U , α un multi-ındice y Γαx0
: D(U)→ C definida mediante
Γαx0
(ϕ) = ∂αϕ(x0).
Entonces Γαx0
es una distribucion en U .
Demostracion: Claramente Γαx0
es lineal.
Veamos que Γαx0
es continua:
Tesis de Maestrıa

26 2.6. Ejemplos.
Si K ⊂ U es tal que K es compacto y ϕj → ϕ en D(K) entonces ∂βϕj → ∂βϕ en Kpara toda β multi-ındice.
Ası,Γα
x0(ϕj) = ∂αϕj(x0)→ ∂αϕ(x0) = Γα
x0ϕ
para todo α multi-ındice. Por lo tanto, Γαx0
es una distribucion en U.
A continuacion se prueba que δ y sus derivadas no son localmente integrables. Estasdistribuciones son, por tanto, singulares.
Proposicion 2.3. Γαx0
no proviene de una funcion para ningun multi-ındice α. En otraspalabras,
Γαx0
(ϕ) 6=∫
Rn
f(x)ϕ(x)dx
para alguna f ∈ L1loc(U).
Demostracion: Cuando α = 0 Γαx0
proviene de una medida :
Γαx0
(ϕ) =
∫
Rn
ϕdµx0= Λµx0
(ϕ)
donde
µx0(A) =
1 si x0 ∈ A0 si x0 /∈ A ,
es la medida concentrada en A.
Veamos que para α = 0, Γ0x0
(ϕ) = ϕ(x0), No proviene de una funcion. Supongamosque x0 = 0, n = 1, ası tenemos δ : D → C, δ(ϕ) = ϕ(0).
Como vimos en el ejemplo 2.13 y el Teorema 2.3, la δ es una funcional lineal y continuaen D. Por el Teorema de Hahn-Banach (ver [9] para su demostracion) existe una extensioncontinua de δ al espacio de funciones L∞
c , esto es las funciones en L∞ de soporte compacto;digamos
T : L∞c → C
T |D = δ
Supongamos que existe f ∈ L1loc tal que T (ϕ) =
∫Rf(x)ϕ(x)dx para toda ϕ ∈ L∞
c .
Para los abiertos Un =(− 1
n, 1
n
)y los compactos Kn =
[− 1
2n, 1
2n
]el Lema C∞ de
Urysohn (ver [9]) permite construir una familia ϕn∞n=1 tal que ϕn ∈ D, 0 6 ϕn 6 1,ϕn = 1 en Kn =
[− 1
2n, 1
2n
], con sopϕn ⊂ Un =
(− 1
n, 1
n
).
Ası,
1 = ϕn(0) = δ (ϕn) = T (ϕn) =
∫
R
f(x)ϕn(x)dx→ 0, cuando n→∞ esto ya que
ϕnf → 0 casi en todas partes, excepto en x = 0 y |ϕnf | 6 |f | ∈ L1([−1, 1]).
Jessica Yuniver Santana Bejarano

2. Introduccion a la Teorıa de Distribuciones 27
Entonces, por el teorema de convergencia dominada de Lebesgue (para una demos-tracion de este resultado ver [9]) se sigue que 1 = ϕn(0) → 0, lo que nos lleva a unacontradiccion.
Similarmente podemos demostrar el resultado para todo α multi-ındice.
Ahora, daremos a conocer un poco de notacion: Sean F ∈ D′(U), ϕ ∈ D(U). En vezde escribir F (ϕ) escribiremos 〈F, ϕ〉 . Un caso particular sera F = f ∈ L1
loc(U) entoncesescribimos 〈f, ϕ〉 =
∫Rn f(x)ϕ(x)dx.
La reflexion de una funcion ϕ en U ⊂ Rn es ϕ(x) = ϕ(−x).
Si y ∈ Rn δy denotara la masa puntual en y, es decir,
δy : D → C
〈δy, ϕ〉 = ϕ(y)
y δ es la masa puntual en el origen, es decir, 〈δ, ϕ〉 = ϕ(0).
Proposicion 2.4. Sea f ∈ L1(Rn) tal que∫
Rn f = a. Entonces
ft → aδ si t→ 0 en D′
Demostracion: Mostremos que para toda ϕ ∈ D se tiene que 〈ft, ϕ〉 → 〈aδ, ϕ〉 . Enefecto,
〈ft, ϕ〉 =
∫
Rn
ft(y)ϕ(y)dy =
∫
Rn
ft(y)ϕ(0− y)dy
= (ft ∗ ϕ)(0)→ ϕ(0) = aδ(ϕ)
= 〈aδ, ϕ〉 cuando t→ 0.
2.7 Regularizacion
Sea f una funcion integrable sobre todo compacto, salvo sobre aquellos que contienenciertos puntos singulares: para simplificar, supondremos un solo punto singular, en x0. Elfuncional f tal que
〈f, ϕ〉 =
∫
Rn
f(x)ϕ(x)dx, ϕ ∈ D
no es una distribucion sobre Rn: el lado derecho solo esta definido, en general, si el soporte
de ϕ excluye a x0; dicho de otro modo, el funcional f es solamente una distribucion sobretodo abierto que excluya a x0.
Tesis de Maestrıa

28 2.7. Regularizacion
El problema de la regularizacion es el siguiente: encontrar una distribucion rf sobreR
n que se reduzca a la distribucion f sobre los abiertos que excluyen a x0. Se dira queesta distribucion (que prolonga, en el entorno de x0, la definicion de la distribucion ffuera de este entorno ), es una regularizacion de la funcion f .
Un ejemplo de regularizacion, es el siguiente.
Ejemplo 2.14. La funcion 1x
no define una distribucion regular porque∫∞−∞
ϕ(x)x
no esconvergente para todas las funciones de prueba. Sin embargo, podemos emplear la nocionde valor principal de Cauchy y definimos:⟨
P 1
x, ϕ(x)
⟩= V P
∫ ∞
−∞
ϕ(x)
xdx
= limε→0
∫
|x|>ε
ϕ(x)
xdx, ϕ ∈ D. (2.11)
donde V P y P 1x
indican el valor principal. Este lımite existe por la siguiente razon. Comoϕ(x) es diferenciable en x = 0, existe una funcion ψ(x) continua en x = 0 tal que
ϕ(x) = ϕ(0) + xψ(x) (2.12)
Sea [−A,A] el soporte de la funcion de prueba ϕ(x), entonces para ε > 0,∫
|x|>ε
ϕ(x)
xdx =
∫
A>|x|>ε
(ϕ(0)
x+ ψ(x)
)dx
=
∫
A>|x|>ε
ψ(x)dx→∫ A
−A
ψ(x)dx cuando ε→ 0. (2.13)
Se puede ver facilmente que esta funcional es lineal. Para probar su continuidad hacemosreferencia a ∫
|x|>ε
ϕ(x)
xdx→
∫ A
−A
ψ(x)dx cuando ε→ 0,
donde sopϕ(x) = [−A,A] y encontramos que⟨P 1
x, ϕ
⟩=
∫ A
−A
ψ(x)dx 6 2Amax |ψ(x)|, −A 6 x 6 A,
por el teorema del valor medio.
Ası, P 1x
es una distribucion.
Ejemplo 2.15. δ±(x) =1
2δ(x)∓ 1
2πiP 1
xson distribuciones singulares en D, llamadas
distribuciones de Heisenberg.
Finalizamos este capıtulo introductorio de teorıa de distribuciones para dar paso a laspropiedades basicas que relacionan esta teorıa con la teorıa clasica de funciones, las cualesnos serviran en capıtulos posteriores para el analisis de ciertos problemas en ecuacionesdiferenciales parciales en el sentido distribucional.
Jessica Yuniver Santana Bejarano
3Capıtulo
Extension de Operadores
Lineales de Distribuciones
Este capıtulo tiene como proposito principal mostrar como podemos llegar a la de-finicion de los operadores de Distribuciones una vez que conocemos su definicion en elsentido clasico, de tal manera que estos esten bien definidos en el sentido de distribuciones.Ademas mostramos varios ejemplos en los cuales ilustramos el uso de tales operadorespara distribuciones que seran de gran importancia en el capıtulo 5 de esta tesis. Tambiendamos a conocer el soporte y el soporte singular de una distribucion mostrando variosresultados de gran importancia y en una ultima seccion hablamos de la convergencia deDistribuciones.
Sea T : X → L1loc(V ) lineal, donde X ⊂ L1
loc(U), U y V son abiertos de Rn y
supongamos que T ′ : D(V )→ D(U) es lineal y continua, tal que
〈Tf, ϕ〉 =
∫
Rn
(Tf)ϕdx =
∫
Rn
f(T ′ϕ)dx = 〈f, T ′ϕ〉 ,
para toda ϕ ∈ D(V ) y f ∈ X. Entonces podemos extender T : D′(U) → D′(V ) tal quepara F ∈ D′(U)
〈TF, ϕ〉 = 〈F, T ′ϕ〉 donde ϕ ∈ D(V ).
Claramente T sigue siendo lineal y ademas es continua.
Sea (Fα)α∈I una red (para una definicion de este concepto ver [9]) en D′(U) tal queFα → F en D′(U).
Antes de continuar trataremos de explicar un poco este concepto. Es una generaliza-cion de la nocion de sucesion, la idea clave es utilizar conjuntos indexados mas general queN. La definicion precisa es como sigue: Una red en un conjunto X es un mapeo φ 7→ xα
de un conjunto directo A en X. Donde un conjunto directo es un conjunto equipado conuna relacion binaria.
Entonces
〈Fα, ϕ〉 → 〈F, ϕ〉 para toda ϕ ∈ D(U);
29

30 3.1. Operadores algebraicos
de aquı que,
〈Fα, T′ψ〉 → 〈F, T ′ψ〉 para toda ψ ∈ D(V ).
Ası,
〈TFα, ψ〉 → 〈TF, ψ〉 para toda ψ ∈ D(V ).
Entonces,
TFα → TF en D′(V ).
Por lo tanto T es continua.
3.1 Operadores algebraicos
Ya hemos definido la suma de dos distribuciones y la multiplicacion por un escalar. Ahoradefiniremos otras operaciones algebraicas.
3.1.1 Cambio de variables
Conociendo como actua una distribucion F, nos interesa saber que es 〈F (x+ b), ϕ(x)〉 siF (x) ∈ D′ y ϕ(x) es una funcion de prueba.
Sea 〈f, ϕ〉 una distribucion regular generada por una funcion f(x) ∈ L1loc(R
n). Seax = Ay − a, donde A es una matriz de n× n con detA 6= 0 y a un vector constante, unatransformacion lineal de R
n en Rn. Entonces, tenemos:
〈f(Ay − a), ϕ(y)〉 =
∫
Rn
f(Ay − a)ϕ(y)dy
=1
|detA|
∫
Rn
f(x)ϕ[A−1(x+ a)
]dx
=1
|detA|⟨f(x), ϕ
[A−1(x+ a)
]⟩, (3.1)
donde A−1 es la inversa de la matriz A.
Afortunadamente, la misma definicion se aplica a una distribucion singular, porque[A−1(x+ a)] es una operacion valida en ϕ(x). De acuerdo a esto, tenemos:
〈T (Ay − a), ϕ(y)〉 =
⟨T (x),
ϕ [A−1(x+ a)]
|detA|
⟩(3.2)
Definicion 3.1. Si F ∈ D′, detA 6= 0 entonces F (Ay + b) ∈ D′
〈F (Ay + b), ϕ(y)〉 =
⟨F (x),
ϕ(A−1(x− b))detA
⟩para toda ϕ ∈ D. (3.3)
Jessica Yuniver Santana Bejarano

3. Extension de Operadores Lineales de Distribuciones 31
Observacion 3.1. Para una traslacion simple, es decir para el caso en el que A = I, lamatriz unidad, tenemos:
〈F (y − a), ϕ(y)〉 = 〈F (x), ϕ(x+ a)〉 . (3.4)
Observacion 3.2. Para una expansion escalar simple, A = cI, b = 0, (3.3) es
〈F (cy), ϕ(y)〉 =1
|cn|⟨F (x), ϕ
(xc
)⟩(3.5)
Ejemplo 3.1. Consideremos la delta de Dirac. Sabemos que 〈δ(x), ϕ(x)〉 = ϕ(0). Ahora,
〈δ(y − a), ϕ(y)〉 = 〈δ(x), ϕ(x+ a)〉 = ϕ(a).
La distribucion δ(y − a) se denota δa(y), la cual como ya mencionamos en el capıtulo 2,se interpreta como una distribucion de masa unitaria concentrada en a.
3.1.2 Traslacion por y ∈ Rn fijo
Si f ∈ L1loc(U) con U ⊂ R
n, consideremos el operador de traslacion
τy : L1loc(U) → L1
loc(V )
(τyf)(x) = f(x− y)
donde V = U + y abierto.
Observamos que para toda f ∈ L1loc(U), ϕ ∈ D(V )
∫
Rn
(τyf)(x)ϕ(x)dx =
∫
Rn
f(x− y)ϕ(x)dx
=
∫
Rn
f(z)ϕ(z + y)dz,
=
∫
Rn
f(z)ϕ(z − (−y))dz
=
∫
Rn
f(z)τ−yϕ(z)dz.
Entonces, es natural definir
T ′ : D(V ) → D(U)
T ′ϕ = τ−yϕ
Ası, tenemos la siguiente definicion
Tesis de Maestrıa

32 3.1. Operadores algebraicos
Definicion 3.2. Definimos la traslacion por y de una distribucion como:
τy : D′(U) → D′(V )
〈τyF, ϕ〉 = 〈F, τ−yϕ〉
para toda F ∈ D′(U) y ϕ ∈ D(V ).
Definicion 3.3. Una distribucion F es homogenea de grado λ si
F (cx) = cλF (x),
para c > 0.
Si F es homogenea de grado λ,
〈F (cy), ϕ(y)〉 = c−n⟨F (x), ϕ
(xc
)⟩= cλ 〈F, ϕ〉
y
⟨F (x), ϕ
(xc
)⟩= cλ+n 〈F, ϕ〉 .
Ejemplo 3.2. 〈δ(cy), ϕ(y)〉 =1
|cn|⟨δ(x), ϕ
(xc
)⟩=
1
|cn| 〈δ(x), ϕ(x)〉 , o
δ(cx) =1
|cn|δ(x). (3.6)
Ası, δ(x) = δ(x1, ..., xn) es una distribucion homogenea de grado −n.
Definicion 3.4. Sea F una distribucion. La reflexion F de F es aquella distribuciondefinida mediante ⟨
F , ϕ⟩
= 〈F, ϕ〉 , ∀ϕ ∈ D(V ). (3.7)
Ejemplo 3.3. Para la distribucion δ tenemos⟨δ, ϕ(x)
⟩= 〈δ, ϕ(−x)〉 = ϕ(0) = 〈δ(x), ϕ(x)〉
o bien, δ(−x) = δ(x). En este sentido se dice que la distribucion delta es una distribucionpar.
Similarmente una distribucion con la propiedad
〈F (−x), ϕ(x)〉 = 〈F (x), ϕ(−x)〉 = −〈F, ϕ〉es llamada una distribucion impar.
Jessica Yuniver Santana Bejarano

3. Extension de Operadores Lineales de Distribuciones 33
3.1.3 Producto de una distribucion y una funcion
En general, es difıcil definir el producto de dos funciones generalizadas. Esta dificultad sepresenta aun en el caso de que las distribuciones esten asociadas a funciones localmenteintegrables. Considerese, por ejemplo, f(x) = g(x) = 1
x12; es claro que f, g ∈ L1
loc, pero
f(x)g(x) = 1/x /∈ L1loc. Sin embargo, es posible asignar un significado al producto de
una funcion generalizada F (x) y una funcion infinitamente diferenciable ψ(x), como loexponemos a continuacion.
Sea ψ ∈ C∞(U), U ⊂ Rn, U abierto. Sea T : L1
loc(U)→ L1loc(U) definida mediante
Tf = ψf.
Ası, para toda ϕ ∈ D(U) tenemos:∫
Rn
(Tf)(x)ϕ(x)dx =
∫
Rn
(ψf)(x)ϕ(x)dx =
∫
Rn
f(x)(ψϕ)(x)dx.
Entonces,
T ′ : D(U) → D(U)
T ′ϕ = ψϕ.
De aquı, podemos definir el operador
T : D′(U) → D′(U)
TF = ψF
como:〈ψF, ϕ〉 = 〈F, ψϕ〉 ∀ϕ ∈ D(U) (3.8)
pues ψϕ ∈ DEjemplo 3.4. 〈ψδ, ϕ〉 = 〈δ, ψϕ〉 = ψ(0)ϕ(0) = ψ(0) 〈δ, ϕ〉 = 〈ψ(0)δ, ϕ〉o
ψ(x)δ(x) = ψ(0)δ(x). (3.9)
Mas generalmente,ψ(x)δ(x− ξ) = ψ(ξ)δ(x− ξ). (3.10)
Ejemplo 3.5. Mostremos que, para n ∈ Z+,
xnP(
1
x
)= xn−1. (3.11)
Si ϕ ∈ D, entonces⟨xnP
(1
x
), ϕ(x)
⟩= V P
∫ ∞
−∞
xnϕ(x)
xdx =
∫ ∞
−∞xn−1ϕ(x)dx =
⟨xn−1, ϕ
⟩.
Tesis de Maestrıa

34 3.1. Operadores algebraicos
3.1.4 Composicion con transformaciones lineales
Sean S ∈ L(Rn,Rn) invertible, U ⊂ Rn y V = S−1(U) abiertos.
Consideremos el mapeo
T : L1loc(U) → L1
loc(V )
Tf = f S.
Claramente T es lineal. Ademas, para toda ϕ ∈ D(V ), se sigue, del teorema de cambiode variables, que:
∫
Rn
(Tf)(x)ϕ(x) =
∫
Rn
(f S)(x)ϕ(x) =
∫
Rn
f(S(x))ϕ(x)dx
=
∫
Rn
f(S(x))(ϕ S−1)(S(x))dx =
∫
Rn
(f(ϕ S−1))(S(x))dx
= |detS|−1
|detS|
∫
Rn
(f(ϕ S−1))(S(x))dx
= |detS|−1
∫
Rn
(f(ϕ S−1))(z)dz.
Ası, para Tf = f S se sigue que∫
Rn
(Tf)(x)ϕ(x)dx = |detS|−1
∫
Rn
f(ϕ S−1)(x)dx;
entonces, igual que antes, se sigue que:
T ′ : D(V ) → D(U)
T ′ϕ = |detS|−1 ϕ S−1.
Finalmente, podemos definir, para F ∈ D′(U),
T : D′(U) → D′(V )
TF = F S.
Ası,
〈F S, ϕ〉 = |detS|−1 ⟨F, ϕ S−1⟩
para toda ϕ ∈ D(V ).
Un caso particular es el siguiente: Sea S : Rn → R
n tal que S(x) = −x, claramente S
es invertible, S−1 = S y |detS| = 1 y si f ∈ L1loc(U) entonces (f S)(x) = f(−x) = f(x).
Jessica Yuniver Santana Bejarano

3. Extension de Operadores Lineales de Distribuciones 35
3.2 Operaciones analıticas
En esta seccion presentamos la operacion de diferenciacion de distribuciones, las defini-ciones de soporte de una distribucion y de convergencia de distribuciones.
La definicion de derivada de una distribucion que desarrollaremos aquı nos lleva aresultados consistentes cuando diferenciamos una distribucion que tambien es una funcionclasica. Por lo tanto, consideraremos primero una distribucion regular generada por unafuncion continuamente diferenciable f(x) = f(x1, x2, . . . , xn).
3.2.1 Diferenciacion
Sean U ⊂ Rn abierto, y
T : C |α|(U) → L1loc(U)
Tf = ∂αf.
donde α es un multi-ındice.
Notemos que para toda ϕ ∈ D(V )∫
Rn
(Tf)(x)ϕ(x)dx =
∫
Rn
(∂αf)(x)ϕ(x)dx = (−1)|α|∫
Rn
f(x) (∂αϕ) (x)dx,
la ultima igualdad se obtiene al integrar por partes.
Entonces, para toda ϕ ∈ D(U)∫
Rn
(∂αf)(x)ϕ(x)dx = (−1)|α|∫
Rn
f(x)(∂αϕ)(x)dx =
∫
Rn
f(x)[(−1)|α|∂αϕ
](x)dx.
En este caso T ′ = (−1)|α| T |D(U).
Ası, podemos extender T = ∂α a todo D′(U) de la siguiente manera:
∂α : D′(U) → D′(V )
〈∂αF, ϕ〉 = (−1)|α| 〈F, ∂αϕ〉 , (3.12)
para F ∈ D′(U) y para toda ϕ ∈ D(V ). Esta es la derivada en el sentido de distribuciones.
Notese que este resultado transforma el problema de derivar una funcion generalizadaal problema de derivar una funcion de prueba que tiene derivadas de todos los ordenes.
Propiedades de las derivadas generalizadas
1. De la definicion de diferenciacion en la ecuacion (3.12) se sigue que una funciongeneralizada es infinitamente diferenciable.
Tesis de Maestrıa

36 3.2. Operaciones analıticas
2. La igualdad F ′(x) = 0 es valida si y solamente si la distribucion F (x) es constante.De hecho, si suponemos que F ′(x) = 0, entonces
0 = 〈F ′(x), ϕ(x)〉 = −〈F (x), ϕ′(x)〉 = −∫
sop ϕ
F (x)ϕ′(x)dx.
Como ϕ′ ∈ D(U) y −∫
sop ϕF (x)ϕ′(x)dx = 0 entonces F (x) es constante.
Por otro lado, si F (x) es constante,
〈F ′, ϕ〉 = 〈0, ϕ〉 = 0;
entonces F ′(x) = 0.
De esta relacion se sigue que si F ′1 = F ′
2, entonces F1 y F2 difieren por una funcionconstante.
3. La derivada generalizada coincide con la derivada clasica siempre que la derivadaclasica exista. Sea f ∈ Cα
c (U), una funcion continua con derivadas parciales conti-nuas hasta orden α y de soporte compacto, entonces ∂βf en D′(U) coincide con laderivada clasica ∂βf para β multi-ındice tal que β 6 α.
Si f ∈ Cαc (U) entonces f ∈ L1
loc(U), U ⊂ Rn abierto. Entonces, f se puede iden-
tificar con la distribucion en U definida en el teorema 2.1 del capıtulo 2, ecuacion(2.7).
Mostremos que ∫
Rn
∂βf(x)ϕ(x)dx = (−1)β
∫
Rn
f(x)∂βϕ(x)dx
para toda ϕ ∈ D(U).
Supongamos que n = 1, α = 1, U = [a, b]. Integrando por partes se obtiene∫ b
a
f ′(x)ϕ(x)dx = f(x)ϕ(x)∣∣∣b
a−∫ b
a
f(x)ϕ′(x)dx = −∫ b
a
f(x)ϕ′(x)dx.
Ahora, si α = 2 se tiene que
∫ b
a
f ′′(x)ϕ(x)dx = f ′(x)ϕ(x)∣∣∣b
a−∫ b
a
f ′(x)ϕ′(x)dx
= −[f(x)ϕ′(x)
∣∣∣b
a−∫ b
a
f(x)ϕ′′(x)dx
]
= (−1)2
∫ b
a
f(x)ϕ′(x)dx.
Supongamos que se vale para α = k, es decir,
∫ b
a
f (k)(x)ϕ(x)dx = (−1)k
∫ b
a
f(x)ϕk(x)dx.
Jessica Yuniver Santana Bejarano

3. Extension de Operadores Lineales de Distribuciones 37
Mostremos que se vale para α = k + 1
∫ b
a
f (k+1)(x)ϕ(x)dx = (−1)k
∫ b
a
f ′(x)ϕ(k)(x)dx
= (−1)k
[f(x)ϕk(x)
∣∣∣b
a−∫ b
a
f(x)ϕk+1(x)dx
]
= (−1)k+1
∫ b
a
f(x)ϕk+1(x)dx.
Similarmente lo podemos hacer por induccion para n > 1, utilizando el teorema deFubini e integracion por partes.
4. Como⟨
∂
∂x1
(∂F
∂x2
), ϕ
⟩=
⟨F,
∂2ϕ
∂x1∂x2
⟩=
⟨F,
∂2ϕ
∂x2∂x1
⟩=
⟨∂
∂x2
(∂F
∂x1
), ϕ
⟩, (3.13)
el resultado de la diferenciacion no depende del orden de la diferenciacion, pues ϕes C∞.
5. La derivada del producto de una distribucion F y una funcion f(x) ∈ C es
∂
∂xj
(fF ) =∂f
∂xj
F + f∂F
∂xj
. (3.14)
Claramente, para ϕ ∈ D,⟨∂(fF )
∂xj
, ϕ
⟩= −
⟨fF,
∂ϕ
∂xj
⟩= −
⟨F, f
∂ϕ
∂xj
⟩
= −⟨F,∂(fϕ)
∂xj
− ∂f
∂xj
ϕ
⟩= −
⟨F,∂(fϕ)
∂xj
⟩+
⟨F,
∂f
∂xj
ϕ
⟩
=
⟨∂F
∂xj
, fϕ
⟩+
⟨∂f
∂xj
F, ϕ
⟩=
⟨f∂F
∂xj
, ϕ
⟩+
⟨∂f
∂xj
F, ϕ
⟩
=
⟨f∂F
∂xj
+∂f
∂xj
F, ϕ
⟩.
Similarmente podemos definir el producto de derivadas de orden superior y tenemos:
∂α(fF ) =∑
β<α
α!
β!(α− β)!(∂α−βf)(∂βF ) (3.15)
donde la suma es desde β = (0, 0, . . . , 0) a α = (α1, α2, . . . , αn).
A continuacion presentaremos las derivadas de algunas funciones generalizadas.
Tesis de Maestrıa

38 3.2. Operaciones analıticas
Ejemplo 3.6. Para la delta tenemos, primero⟨∂δ(x− ξ)
∂xj
, ϕ
⟩= −
⟨δ(x− ξ), ∂ϕ
∂xj
⟩= −∂ϕ(ξ)
∂xj
y en Rn,
⟨δ(n)ξ , ϕ
⟩= (−1)n dnϕ
dxn
∣∣∣∣x=ξ
= −⟨δξ,
dnϕ(x− ξ)dξ
⟩.
Segundo, para una funcion f(x) ∈ C∞, tenemos
⟨f∂δξ∂xj
, ϕ
⟩=
⟨∂δξ∂xj
, fϕ
⟩= −
⟨δξ,
∂(fϕ)
∂xj
⟩= −
⟨δ(x− ξ), f ∂ϕ
∂xj
+∂f
∂xj
ϕ
⟩
= −f(ξ)∂ϕ
∂xj
∣∣∣∣x=ξ
− ∂f
∂xj
∣∣∣∣x=ξ
ϕ(ξ)
= f(ξ)
⟨∂δξ∂xj
, ϕ
⟩− ∂f
∂xj
∣∣∣∣x=ξ
〈δξ, ϕ〉
o bien
f∂δξ∂xj
= f(ξ)∂δξ∂xj
− ∂f
∂xj
∣∣∣∣x=ξ
δξ.
Ejemplo 3.7. (a) Encontremos la derivada distribucional de la funcion:
x+ =
x si x > 00 si x 6 0
,
Para ello, observemos que para ϕ ∈ D, tenemos:
⟨x′+, ϕ
⟩= −〈x+, ϕ
′〉 = −∫ ∞
−∞x+ϕ
′(x)dx = −∫ ∞
0
xϕ′(x)dx
= xϕ∣∣∣∞
0+
∫ ∞
0
ϕ(x)dx =
∫ ∞
0
ϕ(x)dx = 〈H(x), ϕ(x)〉 .
Entoncesd
dxx+(x) = H(x).
(b) Para la funcion de Heaviside tenemos:
〈H ′, ϕ〉 = −〈H,ϕ′〉 = −∫ ∞
0
ϕ′(x)dx = ϕ(0) = 〈δ, ϕ〉
o biendH(x)
dx= δ(x); es decir, la derivada de la distribucion de Heaviside es la delta de
Dirac.
Observese que la funcion de Heaviside H(x) es discontinua en el origen y que el saltode discontinuidad es igual a uno. Ası, podemos decir que su derivada en el sentido de
Jessica Yuniver Santana Bejarano

3. Extension de Operadores Lineales de Distribuciones 39
distribuciones es el “salto”de discontinuidad en el origen multiplicado por la medida dedirac, δ.
Ejemplo 3.8. Ahora, estudiaremos la distribucion |x|
〈|x|, ϕ〉 =
∫ ∞
−∞|x|ϕ(x)dx =
∫ ∞
0
xϕ(x)dx−∫ 0
−∞xϕ(x)dx.
Entonces,
〈|x|′, ϕ〉 = −〈|x|, ϕ′〉 = −∫ ∞
−∞|x|ϕ′(x)dx =
∫ 0
−∞xϕ′(x)dx−
∫ ∞
0
xϕ′(x)dx
Integrando por partes se sigue que:
〈|x|′, ϕ〉 = −∫ 0
−∞ϕ(x)dx+
∫ ∞
0
ϕ(x)dx =
∫ ∞
−∞sgnxdx,
donde sgnx denota a la funcion signo:
sgnx =
1 si x > 00 si x = 0-1 si x < 0
,
Ası,
〈|x|′, ϕ〉 = 〈 sgnx, ϕ〉 o |x|′ = sgnx.
Notese quesgnx = H(x)−H(−x), (3.16)
por lo tanto la segunda derivada se obtiene como sigue:
|x|′′ = sgn′x = H ′(x)−H ′(−x) = δ(x) + δ(−x) = 2δ(x).
Estas y sus funciones asociadas juegan una parte muy util en muchos campos del analisis.
Por ejemplo, podemos evaluar:
I =
∫ 1
−1
|x|f ′′(x)dx.
Usando los resultados anteriores:
I = [|x|f ′(x)]∣∣∣1
−1−∫ 1
−1
|x|′f ′(x)dx
= f ′(1)− f ′(−1)− [|x|′f(x)]∣∣∣1
−1+
∫ 1
−1
|x|′′f(x)dx
= f ′(1)− f ′(−1)− [ sgnxf(x)]∣∣∣1
−1+ 2
∫ 1
−1
δ(x)f(x)dx
= f ′(1)− f ′(−1)− f(1)− f(−1) + 2f(0).
Tesis de Maestrıa

40 3.2. Operaciones analıticas
De (3.16) observamos que
H(x) = sgnx+H(−x) =1
2(1 + sgnx) .
Mas aun, podemos escribir (3.16) como:
sgnx = H(x)− H(x).
Ejemplo 3.9. Sea Ω un intervalo abierto (α, β) en R, sea a ∈ Ω. Supongamos quef ∈ C1 (Ω− a) y ademas supongamos que los lımites laterales f(a+) = lim
x→a+f(x) y
f(a−) = limx→a−
f(x) existen y son finitos. Sea [f ′] la derivada clasica de f en Ω − ay supongamos que [f ′] es acotada en Ω − a . Denotemos como Jf(a) a la diferenciaf (a+)− f (a−) . Si la funcion f tiene una discontinuidad simple (o una discontinuidad detipo uno) en a, Jf(a) denota “el salto”de f en el punto a.
De nuestras hipotesis, se sigue que f y [f ′] definen distribuciones en Ω. Encontremosla derivada de f en el sentido de distribuciones.
Tenemos, que para toda ϕ ∈ D(Ω)
〈f ′, ϕ〉 = −〈f, ϕ′〉 = −∫ a
α
f(x)ϕ′(x)dx−∫ β
a
f(x)ϕ′(x)dx.
Integrando por partes obtenemos:
−∫ a
α
f(x)ϕ′(x)dx = −[f(x)ϕ(x)
∣∣∣a
α−∫ a
α
[f ′] (x)ϕ(x)dx
]
= −(
limx→a−
f(x)
)ϕ(a) + f(α)ϕ(α) +
∫ a
α
[f ′] (x)ϕ(x)dx
= −ϕ(a)f(a−) +
∫ a
α
[f ′] (x)ϕ(x)dx.
Similarmente,
−∫ β
a
f(x)ϕ′(x)dx = ϕ(a)f(a+) +
∫ β
a
[f ′] (x)ϕ(x)dx.
Ası,
〈f ′, ϕ〉 = ϕ(a) [f(a+)− f(a−)] +
∫ β
α
[f ′] (x)ϕ(x).
Reescribiendo la ultima expresion tenemos
〈f ′, ϕ〉 = 〈Jf(a)δa, ϕ〉+ 〈[f ′] , ϕ〉 ,para toda ϕ ∈ D(Ω). Por lo tanto,
f ′ = Jf(a)δa + [f ′] ,
es decir, la derivada clasica de f en el sentido de distribuciones es la suma de la derivadaclasica [f ′] mas una medida de masa Jf(a) concentrada en el punto a.
Jessica Yuniver Santana Bejarano

3. Extension de Operadores Lineales de Distribuciones 41
Finalmente presentamos un resultado en el que utilizamos los ejemplos anteriores yque nos servira mas adelante en las aplicaciones:
Teorema 3.1. Sea f(x) una funcion n veces continuamente diferenciable; entonces
f(x)δn(x) = (−1)nf (n)(0)δ(x) + (−1)n−1nf (n−1)(0)δ′(x)
+(−1)(n−2)n(n− 1)
2!f (n−2)(0)δ′′(x) + · · ·+ f(0)δ(n)(x). (3.17)
Demostracion: Notese que∫ ∞
−∞
f(x)δ(n)(x)
ϕ(x)dx =
∫ ∞
−∞f(x)ϕ(x) δ(n)(x)dx
=[f(x)ϕ(x) δ(n−1)(x)
] ∣∣∣∞
−∞−∫ ∞
−∞f(x)ϕ(x)′ δ(n−1)(x)dx
= −∫ ∞
−∞f(x)ϕ(x)′ δ(n−1)(x)dx.
Despues de una sucesion de integraciones por partes, obtenemos:∫ ∞
−∞f(x)ϕ(x) δ(n)(x) = (−1)(n)
∫ ∞
−∞f(x)ϕ(x)(n) δ(x)dx.
Ahora, usamos la formula
f(x)ϕ(x)(n) = f (n)(x)ϕ(x) + nf (n−1)ϕ(x) + nf (n−1)(x)ϕ′(x)
+n(n− 1)
2!f (n−2)(x)ϕ′′(0) + · · ·+ f(0)ϕ(n)(0),
en la relacion anterior tenemos:∫ ∞
−∞
f(x)δ(n)(x)
ϕ(x)dx = (−1)nf (n)ϕ(x)δ(x) + (−1)nnf (n−1)(x)ϕ′(x)δ(x)
+(−1)nn(n− 1)
2!f (n−2)(x)ϕ′′(0)δ(x)
+ · · ·+ (−1)nf(0)ϕ(n)(x)δ(x)dx
= (−1)nf (n)(0)ϕ(0) + (−1)nnf (n−1)(0)ϕ′(0)
+(−1)nn(n− 1)
2!f (n−2)(0)ϕ′′(0)
+ · · ·+ (−1)nf(0)ϕ(n)(0). (3.18)
Como ∫ ∞
−∞ϕ(x)δ(k)(x)dx = (−1)k
∫ ∞
−∞ϕ(k)(x)δ(x)dx = (−1)kϕ(k)(0).
Tesis de Maestrıa

42 3.2. Operaciones analıticas
La relacion (3.18) puede escribirse como:⟨f(x)δ(n)(x), ϕ(x)
⟩= (−1)nf (n)(0) 〈δ(x), ϕ(x)〉+ (−1)n−1nf (n−1)(0) 〈δ′(x), ϕ(x)〉
+(−1)n−2n(n− 1)
2!f (n−2)(0) 〈δ′′(x), ϕ(x)〉
+ · · ·+⟨δ(n)(x), ϕ(x)
⟩, (3.19)
la cual es equivalente a (3.17).
Orden de una distribucion
Del ejemplo 3.7(b) encontramos que δ(x) es la derivada de una distribucion regular, H(x).Por esta razon, la distribucion delta es llamada una distribucion de orden 1. En general,una distribucion se dice de orden n si puede ser expresada como la n-esima derivada deuna distribucion regular.
Esto significa que mientras mas alto sea el orden de una distribucion, mas “singular”es.
Una distribucion de orden cero es una distribucion regular.
Para generalizar y resumir estas ideas tenemos:
F es una distribucion de orden finito α, si existe una funcion localmente integrablef y un multi-ındice α tal que
F = Dαf.
3.2.2 El Soporte y el soporte singular de una distribucion
Antes de dar la definicion de soporte de una distribucion, necesitamos discutir el teoremadel encolado de trozos.
La cuestion de interes es la siguiente: ¿se puede reconstruir la definicion global de unadistribucion sobre R
n a partir de sus definiciones locales sobre abiertos que recubran aR
n?. Esto es lo que Schwartz llama el problema del “encolado de trozos” (ver [10], [13]).
La respuesta, positiva, la proporciona el siguiente teorema.
Teorema 3.2. Sea Ω ⊂ Rn abierto, y sea (Ωλ)λ∈Λ, donde Λ es un conjunto de ındices, una
cubierta de Ω. Supongamos que, para cada λ ∈ Λ, existe una distribucion Fλ ∈ D′(Ωλ), yque
Fλ = Fµ en Ωλ ∩ Ωµ si Ωλ ∩ Ωµ 6= ∅ (3.20)
Entonces, existe una unica F ∈ D′(Ω) tal que F = Fλ en Ωλ, para cada λ ∈ Λ.
Para demostrar este teorema, haremos uso del Lema 2.1 y del siguiente resultado:
Jessica Yuniver Santana Bejarano

3. Extension de Operadores Lineales de Distribuciones 43
Lema 3.1. Designemos por DK al conjunto de los elementos ψ de D cuyo soporte S esestrictamente interior a K. Haciendo, entonces
ψj(x) = ψ(x)ϕj(x),
de donde ψ(x) =∑k
j=1 ψj(x), y las ϕj son las funciones encontradas en el Lema 2.1, setiene que ψj ∈ DK, para toda j.
Demostracion: Esta funcion, con soporte contenido en S, es, en efecto, para todo x dela clase C∞ (puesto que es de esta clase sobre K e identicamente nula fuera de S). Luego,cualquiera que sea el recubrimiento del compacto K por una union finita de abiertosacotados Ωj, todo elemento de DK es la suma de igual numero de elementos ψj del mismoespacio, estando el soporte de ψj en Ωj.
Ahora, podemos demostrar el teorema del encolado de trozos.
Demostracion (del Teorema 3.2): Sea ψ ∈ D(Ω), con soporte S. Por el Lema 3.1tomando para K ⊂ Ω compacto tal que S sea interior. Al estar Ω recubierto por los Ωλ,tambien lo esta K, por un numero finito de ellos.
Denotemosle por Ωλ(1), . . .Ωλ(m): se tiene, ψ =∑m
j=1 ψj(x) siendo cada ψj de la claseC∞ y estando su soporte en K ∩ Ωλ(j), j = 1, . . . ,m.
Entonces podemos elegir,
〈F, ψ〉 =m∑
j=1
〈F, ψj〉 =m∑
j=1
⟨Fλ(j), ψj
⟩
=m∑
j=1
⟨Fλ(j), ψ(x)ϕj(x)
⟩, (3.21)
donde las ϕj son las funciones encontradas en el Lema2.4.
Consideremos otra cubierta abierta Ω′µ(1),...,Ω′
µ(l)del sopψ, y un conjunto correspon-
diente de funciones ψk tales que se satisface el Lema 3.1. Entonces,
m∑
j=1
⟨Fλ(j), ψ(x)ϕj(x)
⟩=
m∑
j=1
l∑
k=1
⟨Fλ(j), ψϕjϕ
′k
⟩
=m∑
j=1
l∑
k=1
⟨Fµ(k), ψϕjϕ
′k
⟩, (3.22)
por (3.20). Sumando sobre las j′s tenemos:
m∑
j=1
⟨Fλ(j), ψϕj
⟩=
l∑
k=1
⟨Fµ(k), ψϕ
′k
⟩.
Tesis de Maestrıa

44 3.2. Operaciones analıticas
Por lo tanto, (3.21) define 〈F, ψ〉 no ambiguamente. Mas aun, si sopϕ ⊂ Ωλ para algunosλ ∈ Λ entonces podemos tomar l = 1 y concluir que F = Fλ en Ωλ.
Finalmente, mostremos que (3.21) es una distribucion:
Claramente (3.21) es lineal.
Probemos que es continua; en efecto para cada K ⊂ Ω tal que K es compacto y(ψj)
∞j=1 una sucesion en D(Ω) tal que ψj → ψ en D(K) tendremos:
|〈F, ψj〉 − 〈F, ψ〉| =
∣∣∣∣∣m∑
i=1
⟨Fλ(i), ϕiψj
⟩−
m∑
i=1
⟨Fλ(i), ψϕj
⟩∣∣∣∣∣
=
∣∣∣∣∣m∑
i=1
[⟨Fλ(i), ϕiψj
⟩−⟨Fλ(i), ψϕj
⟩]∣∣∣∣∣
6
m∑
i=1
∣∣⟨Fλ(i), ϕiψj
⟩−⟨Fλ(i), ψϕj
⟩∣∣
=m∑
i=1
∣∣⟨Fλ(i), ϕj(ψj − ψ)⟩∣∣→ 0,
cuando j →∞.
Por lo tanto, 〈F, ψ〉 es una distribucion. Quedando ası completamente mostrado elteorema.
Por ahora, no podemos hablar acerca de propiedades de distribuciones, solo podemosconsiderar su accion en la clase de funciones de prueba.
Las funciones generalizadas no pueden ser evaluadas en puntos, pueden ser restringidasa conjuntos abiertos. Si G es un subconjunto de Ω, entonces D(G) esta naturalmenteincluido en D(Ω), y por lo tanto toda funcion generalizada en Ω define una funciongeneralizada en G por restriccion. Consecuentemente, podemos definir:
Definicion 3.5. Decimos que F ∈ D′(Ω) se anula en G ⊂ Ω ⊂ Rn abierto si 〈F, ϕ〉 = 0
para toda ϕ ∈ D. Una distribucion F se anula en una region de Rn si se anula en una
vecindad de toda parte de G. De acuerdo a esto, las distribuciones F1 y F2 son iguales enG si F1 − F2 = 0 para toda x ∈ G.
Definicion 3.6. Un punto x se llama un punto esencial de una distribucion F si no existeuna vecindad de x en la cual F se anula.
Ahora, como una consecuencia del Teorema del Encolado de Trozos definiremos elsoporte de una distribucion.
Por los resultados anteriormente expuestos, sabemos que cuando una distribucionesta definida sobre diversos abiertos (por definiciones no contradictoras sobre las partescomunes), esta definida sobre su union.
Jessica Yuniver Santana Bejarano

3. Extension de Operadores Lineales de Distribuciones 45
En particular, si una distribucion F es nula sobre diversos abiertos es nula sobre suunion.
Consideremos en tal caso, todos los abiertos en los que F = 0. Entre ellos existe unomayor que los demas, que es su union. Designemosle por Ω0; su complemento O = Ωc
0 sedenomina soporte de la distribucion F .
Se puede dar a esta definicion varias formas equivalentes:
1. O es el complemento de las uniones de los abiertos en que F = 0.
2. x ∈ O si, y solamente si, F no es nula en ninguna vecindad de x.
3. O es el mınimo cerrado tal que F es nula sobre todo abierto exterior a O.
Tecnicamente, podemos describir el soporte como el conjunto cerrado mas pequenofuera del cual F se anula.
Ejemplo 3.10. El sopH(x), donde H(x) es la funcion de Heaviside, es el eje x positivo,es decir, x > 0.
Ejemplo 3.11. El soporte de la delta de Dirac, sop δ(x), y de cada una de sus derivadas,es el punto x = 0.
Proposicion 3.1. Si la distribucion F se anula en x ∈ R entonces tambien DαF = 0para x ∈ R; entonces sopDαF ⊂ sopF.
Demostracion: La prueba se sigue observando que si ϕ ∈ DR, entonces tambien Dαϕ ∈DR. Ası,
〈DαF, ϕ〉 = (−1)|α| 〈F,Dαϕ〉 = 0,
de donde se sigue que DαF = 0 para toda x ∈ R. Por lo tanto, sopDαF ⊂ sopF.
Proposicion 3.2. Sea a una funcion. Entonces sop aF ⊂ sop a ∩ sopF.
Demostracion: Notese que si x ∈ sop aF , entonces a(x)F (x) 6= 0 para toda vecindadde x. Es decir, a(x) 6= 0 y F (x) 6= 0 para toda vecindad de x. Ası, x ∈ sop a y x ∈ sopF ,esto es x ∈ sop a ∩ sopF.
Ejemplo 3.12. La distribucion
|F |2 = F 21 + F 2
2 + · · ·+ F 2n
tiene a todo el espacio Rn como su soporte, a pesar de que |F |2 se anula en F = 0. La
razon es que es el comportamiento de una distribucion sobre la vecindad de un punto quedetermina si el punto esta en el soporte de F.
Tesis de Maestrıa

46 3.2. Operaciones analıticas
Teorema 3.3. Sea F ∈ D′(Ω) y ϕ ∈ D(Ω). Si los soportes de F y ϕ son ajenos, entonces〈F, ϕ〉 = 0.
Demostracion: Sea K = sopϕ. Por hipotesis, todo punto del compacto K tiene unavecindad abierta en el cual F = 0. Esta cubierta abierta de K contiene una subcubiertaΩ1, . . . ,Ωm. Con ψ1, . . . , ψm como en el Lema 2.1 tenemos:
〈F, ϕ〉 = 〈F, 1ϕ〉 =
⟨F,
m∑
j=1
ψjϕ
⟩=
m∑
j=1
〈F, ψjϕ〉 = 0,
ya que ψjϕ ∈ D(Ωj) y F = 0 en Ωj para j = 1, . . . ,m por hipotesis; lo cual prueba elteorema.
Corolario 3.1. Si F ∈ D′(Ω) y todo punto de Ω tiene una vecindad en la cual F = 0,entonces F = 0.
Otro concepto importante es el de soporte singular. Este se define como la cerraduradel conjunto de puntos donde F (x) no es una funcion suave. Es el conjunto mas pequenofuera del cual F es igual a una funcion f(x) que posee derivadas de todos los ordenes.
Ejemplo 3.13. La δ(x) y la funcion H(x) tienen como soporte singular al punto x = 0.Similarmente la distribucion |x| tambien tiene al punto x = 0 como soporte singular.
Como ultimo ejemplo consideremos el siguiente.
Ejemplo 3.14. Considere el funcional∫ 1
−1
(sen 2x)ϕ(x)dx
Escribiendolo como: ∫ 1
−1
(sen 2x)ϕ(x)dx =
∫ ∞
−∞f(x)ϕ(x)dx
donde
f(x) =
sen 2x si −1 < x < 1,
0 en otro caso,
es claro que el soporte de este funcional es el intervalo cerrado [−1, 1] mientras que susoporte singular consiste de los puntos -1 y 1.
Para terminar esta subseccion estudiaremos dos resultados. El primero de ellos serefiere a la composicion δ[f(x)] donde f(x) es una funcion, y probaremos que
δ[f(x)] =n∑
m=1
δ(x− xm)
|f ′(xm)| , (3.23)
Jessica Yuniver Santana Bejarano

3. Extension de Operadores Lineales de Distribuciones 47
donde xm,m = 1, 2, . . . , n es el conjunto de ceros simples de f(x).
Supongamos que f(x) tiene unicamente un cero simple en x = x1 y que f ′(x1) > 0,entonces f es uno a uno en una vecindad de x1. La sustitucion y = f(x) en el funcional∫∞−∞ δ[f(x)]ϕ(x)dx nos da
∫ ∞
−∞δ(y)
ϕ[x(y)]
f ′(x)dy =
ϕ(x1)
f ′(x1).
Para el caso f ′(x1) < 0 los lımites de integracion se invierten y el lado derecho de la
relacion anterior es −ϕ(x1)
f ′(x1). Combinando estos dos casos, tenemos:
δ[f(x)] =δ(x− x1)
|f ′(x1)|.
Cuando la funcion f(x) tiene ceros simples en x1, x2, . . . , xn, tenemos la relacion (3.23).Si f(x) tiene ceros de orden mayor, no se le da significado alguno a δ[f(x)].
La siguiente aproximacion alternativa es instructiva y util para resolver problemasespecıficos. Para fijar ideas, supongamos nuevamente que f(x) tiene un cero simple enx1 y ası f(x1) = 0 pero f ′(x1) 6= 0, lo que asumimos nuevamente positivo. Mas aun,consideremos primero un intervalo finito α < x1 < β. Ası, f(x) crece monotonamente def(α) a f(β) cuando x corre de α a β, entonces
H[f(x)] = H(x− x1) (3.24)
donde H es la funcion de Heaviside. Derivando (3.24) obtenemos:
d
dxH[f(x)] = δ(x− x1)
oδ[f(x)] = [f ′(x1)]
−1δ(x− x1). (3.25)
Para una funcion monotonamente decreciente f
H[f(x)] = H(x1 − x) (3.26)
cuya diferencial esδ[f(x)] = −[f ′(x1)]
−1δ(x− x1). (3.27)
Combinando (3.27) con (3.25) nuevamente tenemos (3.23).
La extension a mas ceros simples e intervalos infinitos ahora es natural.
Claramente, si existen n ceros de f(x), entonces
δ[f(x)] =n∑
m=1
δ(x− xm)
|f ′(xm)| ,
Tesis de Maestrıa

48 3.2. Operaciones analıticas
como se querıa.
Podemos dar un paso mas y evaluar δ′[f(x)], donde f(x) es una funcion 2 vecescontinuamente diferenciable que crece monotonamente de f(α) a f(β). Si f(ξ) = 0,donde α < ξ < β, entonces
δ′[f(x)] =1
|f ′(ξ)|2δ′(x− ξ) +
f ′′(ξ)
f ′(ξ)δ(x− ξ)
. (3.28)
De hecho, si ϕ(x) es una funcion de prueba y si hacemos el cambio t = f(x), tenemos
〈ϕ(x), δ′[f(x)]〉 =
∫ ∞
−∞ϕ(x)δ′[f(x)]dx =
∫ ∞
−∞ϕ(f−1(t)
)δ′(t)
[f−1(t)
]′dt
= − d
dt
[ϕ(f−1(t)
) [f−1(t)
]′]∣∣∣∣∣
t=ξ
= − d
dt
[ϕ(x)
dx
dt
]∣∣∣∣∣x=ξ
= −[
d
dx
(ϕ(x)
f ′(x)
1
f ′(x)
)]∣∣∣∣∣x=ξ
= − 1
f ′(ξ)
[ϕ′(ξ)f ′(ξ)− ϕ(ξ)f ′′(ξ)
|f ′(ξ)|2]
= − 1
f ′(ξ)
[ϕ′(ξ)
f ′(ξ)− ϕ(ξ)f ′′(ξ)
|f ′(ξ)|2]
=
⟨ϕ(x),
1
|f ′(ξ)|2δ′(x− ξ) +
f ′′(ξ)
f ′(ξ)δ(x− ξ)
⟩,
lo que prueba (3.28).
3.2.3 Convergencia de distribuciones
Hemos discutido algunas de las propiedades mas importantes de funciones que hemosgeneralizado a distribuciones; hasta el momento solo hemos hablado de la convergencia delas funciones de prueba en el sentido clasico. En esta seccion desarrollaremos el conceptode convergencia de distribuciones.
Como comentabamos al inicio de la seccion 2.5 (pagina 21), el espacio D′ tiene comodual al espacio D y le asociamos la siguiente definicion de convergencia.
Definicion 3.7. Una sucesion de distribuciones Fm ∈ D′, m = 1, 2, ..., se dice que con-verge a una distribucion F ∈ D′ si
limm→∞
〈Fm, ϕ〉 = 〈F, ϕ〉 (3.29)
para toda ϕ ∈ D.
Jessica Yuniver Santana Bejarano

3. Extension de Operadores Lineales de Distribuciones 49
Cuando la sucesion de distribuciones consiste de funciones localmente integrablesfm(x), existe la siguiente relacion entre convergencia clasica y convergencia distribucionaltambien conocida como convergencia debil.
Proposicion 3.3. Sean fm ∈ L1loc. Si fm(x)
u→ f(x) sobre cada intervalo finito, entonces
〈fm, ϕ〉 → 〈f, ϕ〉 .
Demostracion: En efecto,
limm→∞
〈fm, ϕ〉 = limm→∞
∫ ∞
−∞fm(x)ϕ(x)dx
=
∫ ∞
−∞f(x)ϕ(x)dx
= 〈f, ϕ〉
para ϕ ∈ D, ya que fm(x)u→ f(x).
Teorema 3.4. Si la sucesion Fm de distribuciones converge a F , entonces la sucesionDαFm converge a DαF .
Demostracion: En efecto, para ϕ ∈ D
limm→∞
〈DαFm, ϕ〉 = limm→∞
(−1)|α| 〈Fm, Dαϕ〉 = (−1)|α| 〈F,Dαϕ〉 = 〈DαF, ϕ〉 ,
ya que Fm → F en el sentido debil.
Definido el concepto de lımite de una sucesion de distribuciones tenemos el siguienteconcepto para la convergencia de series de distribuciones:
Definicion 3.8. Una serie de distribuciones∑∞
m=1 Sm converge a T si la sucesion de
sumas parciales Tm =∑k
m=1 Sm
converge a T .
Escribimos∑∞
m=1 Sm = T .
Como consecuencia del Teorema 3.4 tenemos el siguiente resultado:
Corolario 3.2. Toda sucesion convergente o serie de distribuciones puede ser diferenciadatermino por termino las veces que sea necesario.
Hemos visto en la Proposicion 3.3 que si una sucesion de funciones localmente inte-grables converge uniformemente a una funcion f , entonces tambien converge a f en elsentido de distribuciones.
Tesis de Maestrıa

50 3.2. Operaciones analıticas
Ahora, extenderemos la definicion de convergencia debil a una sucesion de distribu-ciones Fλ(x) que depende de un parametro real λ. Esto es,
Fλ → F cuando λ→ λ0 si limλ→λ0
〈Fλ, ϕ〉 = 〈F, ϕ〉 , ϕ ∈ D. (3.30)
El teorema de diferenciacion en este caso nos da:
limλ→λ0
⟨DλFλ, ϕ
⟩= lim
λ→λ0
(−1)|α| 〈Fλ, Dαϕ〉 = (−1)|α| 〈F,Dαϕ〉 = 〈DαF, ϕ〉 .
Un resultado importante es la completez de D′(Ω).
Teorema 3.5. Sea fn una sucesion en D′(Ω) tal que 〈fn, ϕ〉 converge para toda ϕ ∈ D(Ω).Entonces existe f ∈ D′(Ω) tal que fn → f . En otras palabras, D′ es completo con respectoa la convergencia debil.
Demostracion: Definamos〈f, ϕ〉 = lim
n→∞〈fn, ϕ〉 (3.31)
Claramente, f es un mapeo lineal de D(Ω) a R.
Para verificar que f ∈ D′(Ω), tenemos que establecer su continuidad, es decir, debemosmostrar que si ϕn → 0 en D(Ω), entonces 〈f, ϕn〉 → 0.
Supongamos lo contrario.
Entonces, despues de elegir una subsucesion que nuevamente denotaremos como ϕn,supondremos que ϕn → 0 pero |〈f, ϕn〉| > c > 0.
Ahora, recordemos que convergencia a 0 en D(Ω) significa que los soportes de todaslas ϕn estan en un compacto fijo de Ω y que todas las derivadas de las ϕn convergen acero uniformemente.
Despues de elegir nuevamente una subsucesion, asumiremos que
|Dαϕn(x)| 6 4−n para |α| 6 n.
Sea ahora ψn = 2nϕn. Entonces las ψn convergen a 0 en D(Ω), pero |〈f, ϕn〉| → ∞.
Ahora, recursivamente construiremos una subsucesion f ′n de fn y una subsucesion
ψ′n de ψn .Primero elijamos ψ′
1 tal que |〈f, ψ′1〉| > 1.
Como 〈fn, ψ′1〉 → 〈f, ψ′
1〉 , debemos elegir f ′1 tal que |〈f ′
1, ψ′1〉| > 1. Ahora, elijamos f ′
j
y ψ′j para j < n. Entonces, elegimos ψ′
n de la sucesion ψn tal que
∣∣⟨f ′j, ψ
′n
⟩∣∣ < 1
2n−j, j = 1, 2, ..., n− 1 (3.32)
|〈f, ψ′n〉| >
n−1∑
j=1
∣∣⟨f, ψ′j
⟩∣∣+ n (3.33)
Jessica Yuniver Santana Bejarano

3. Extension de Operadores Lineales de Distribuciones 51
Esto es posible por que, por un lado ψn → 0, y por otro lado |〈f, ψn〉| → ∞. Como,〈fn, ψ〉 → 〈f, ψ〉, podemos elegir f ′
n tal que
|〈f ′n, ψ
′n〉| >
n−1∑
j=1
∣∣⟨f ′n, ψ
′j
⟩∣∣+ n. (3.34)
Ahora, elegimos
ψ =∞∑
n=1
ψ′n. (3.35)
Se sigue de la construccion de las ψ′n que las series de la derecha convergen en D(Ω).
Por lo tanto,
〈f ′n, ψ〉 =
n−1∑
j=1
⟨f ′
n, ψ′j
⟩+ 〈f ′
n, ψ′n〉+
∞∑
j=n+1
⟨f ′
n, ψ′j
⟩. (3.36)
De (3.32) encontramos que
∣∣∣∣∣∞∑
j=n+1
⟨f ′
n, ψ′j
⟩∣∣∣∣∣ <
∞∑
j=n+1
2n−j = 1 (3.37)
y esto junto con (3.36) y (3.34) implica que |〈f ′n, ψ〉| > n− 1.
Por lo tanto, el lımite de
〈f ′n, ψ〉
cuando n→∞ no existe, lo cual es una contradiccion.
Tesis de Maestrıa

52 3.2. Operaciones analıticas
Jessica Yuniver Santana Bejarano

4Capıtulo
Propiedades Adicionales de
Distribuciones.
En este capıtulo desarrollaremos tres propiedades muy importantes de las distribu-ciones que son: la transformada de Fourier, el producto directo de distribuciones y laconvolucion. Estas propiedades son de gran utilidad para resolver algunos problemasbasicos de ecuaciones diferenciales en el sentido distribucional, llevaremos a la practicaestos resultados para analizar cierto tipo de problemas al final del capıtulo.
4.1 Distribuciones temperadas y transformadas de
Fourier
En esta seccion, nuestro objetivo sera extender la definicion de transformada de Fouriera las distribuciones. Primero recordemos que la definicion de transformada de Fourier es,
f(ξ) = F (f(x)) =
∫ ∞
−∞eiξxf(x)dx. (4.1)
Claramente, si g(x) = f(x) casi en todas partes entonces g(ξ) = f(ξ). La funcion f(ξ)definida en (4.1) es una funcion continua, luego es localmente integrable. Podemos en-tonces considerarla como una distribucion y, si ϕ(x) es una funcion de prueba, se tiene:
⟨f , ϕ
⟩=
∫ ∞
−∞fϕdx =
∫ ∞
−∞ϕ(ξ)
∫ ∞
−∞eiξxf(x)dxdξ.
Pero, dado que ϕ(x)eiξxf(x) es integrable en el espacio producto de las x-ξ, por el teoremade Fubini (ver [9]) se puede intercambiar el orden de integracion para obtener:
⟨f , ϕ
⟩=
∫ ∞
−∞f(x)
∫ ∞
−∞eiξxϕ(ξ)dξdx = 〈f, ϕ〉 .
Esta relacion sugiere que la extension de la transformada de Fourier a las distribuciones
53

54 4.1. Distribuciones temperadas y transformadas de Fourier
se puede definir mediante la relacion⟨F , ϕ
⟩= 〈F, ϕ〉 . (4.2)
Para dar sentido a esta formula habra que ver las propiedades que tienen las funcionesque son transformadas de Fourier de una funcion ϕ(x) del espacio D.
La existencia y la derivabilidad de la transformada de Fourier dependen de que lasfunciones eiξxϕ(x) y eiξxxϕ(x) sean integrables. Si ξ es real (unico caso considerado hastaahora), tenemos que |eiξx| = 1, por lo que este factor no influye en la integrabilidad, perosi ξ = ξ1+iξ2, con ξ1, ξ2 ∈ C, entonces |eiξx| = e−ξ2x y este factor altera las propiedades deintegrabilidad (por ser el intervalo de integracion infinito). Pero si ϕ ∈ D la integracionse hace sobre un intervalo finito y, por lo tanto, las funciones eiξxϕ(x) y eiξxxϕ(x) son
integrables para ξ ∈ C. La formula (4.1) define en este caso una funcion f(ξ) definiday derivable en C, es decir, una funcion entera; se tiene entonces que la transformada deFourier de una funcion ϕ(x) de soporte acotado es una funcion f(ξ) que se puede prolongaral campo complejo y dicha prolongacion nos da una funcion entera.
La funcion entera f(ξ) no puede ser nula en un segmento del eje 0X sin ser identica-mente nula. Mas aun tenemos el siguiente resultado:
Proposicion 4.1. Sea ϕ ∈ D entonces ϕ /∈ D si ϕ no es identicamente cero. De hecho,ϕ no puede anularse en un abierto no vacıo a menos que ϕ = 0.
Demostracion: Supongamos que ϕ se anula en una vecindad de un punto ξ0 ∈ Rn.
Sin perdida de generalidad supongamos que ξ0 = 0. (En otro caso, si ξ0 6= 0 substitu-imos ϕ por la funcion eiξ0xϕ(x) y ası F (eiξ0xϕ) = τξ0ϕ la cual se anula en una vecindadde 0). Ası,
ϕ(ξ) =
∫
Rn
eiξxϕ(x)dx =
∫
Rn
∞∑
k=0
(iξx)k
k!ϕ(x)dx =
∞∑
k=0
ik
k!
∫
Rn
(ξx)kϕ(x)dx
=∞∑
k=0
ik
k!
∫
Rn
∑
|α|=k
k!
α!(ξ1x1 + · · ·+ ξnxn)αϕ(x)dx
=∞∑
k=0
∑
|α|=k
ξα
α!
∫
Rn
ikxαϕ(x)dx =∞∑
k=0
∑
|α|=k
ξα
α!
∫
Rn
(ix)αϕ(x)dx
=∞∑
k=0
∑
|α|=k
ξα
α!F ((ix)αϕ(x))
∣∣∣ξ=0
=∞∑
k=0
∑
|α|=k
ξα
α!∂αϕ(0) =
∑
α
ξα
α!∂αϕ(0) = 0,
donde hemos usado la formula multinomial,
(x1 + x2 + · · ·+ xn)n =∑
|α|=k
k!
α!xα.
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 55
Entonces ϕ(ξ) = 0 para toda ξ ∈ Rn. Por lo tanto, ϕ ≡ 0.
Por lo tanto, si para mantener la definicion clasica de la transformada de Fourier deuna funcion, queremos definir la transformada de una distribucion por la formula (4.2),tenemos que sacar de las funciones de prueba la restriccion de ser de soporte acotado.
A primera vista podrıa pensarse en considerar las distribuciones de soporte compacto,pero acabamos de ver que si nos limitamos a ellas sus transformadas de Fourier no son yade soporte compacto y no se podra reiterar la transformada de Fourier.
La posibilidad de la extension fue conseguida por Schwartz, al evitar estas dificultadesenriqueciendo la clase de funciones de prueba creando un nuevo espacio de prueba, el delas funciones indefinidamente derivables de crecimiento rapido en el infinito, en el que sereemplaza la condicion de ser nulas en un entorno del infinito, por la condicion de quelas funciones en el infinito sean infinitesimas de un orden mayor que cualquier infinitopotencial, en otras palabras las funciones en este espacio son tales que ella y sus derivadasse anulan en infinito mas rapido que el recıproco de cualquier potencia de |x|.
4.1.1 Funciones de Prueba de Rapido Decaimiento
Definicion 4.1. El espacio S de funciones de prueba de rapido decaimiento contiene a lasfunciones a valores complejos ϕ(x) = ϕ (x1, . . . , xn) que tienen las siguientes propiedades:
1. ϕ(x) es infinitamente diferenciable; es decir, ϕ(x) ∈ C∞(Rn).
2. ϕ(x), ası como sus derivadas de todos los ordenes, se anulan en infinito mas rapidoque el recıproco de cualquier polinomio.
Este espacio de funciones tambien se conoce como espacio de Schwartz y a sus elementosse les llama funciones de Schwartz.
La propiedad 2 puede expresarse por la desigualdad
|xpDαϕ(x)| < Cpα, (4.3)
donde p = (p1, p2, . . . , pn) y α = (α1, . . . , αn) son n-uplas de enteros no-negativos y Cpα
es una constante que depende de p, α y ϕ(x).
Es evidente que D ⊂ S, porque todas las funciones de prueba en D se anulan fuera deun intervalo finito, mientras que todas las funciones de prueba en S decrecen rapidamenteen infinito.
Convergencia en S
Una sucesion de funciones de prueba en S, ϕm(x) se dice que converge a ϕ0(x) si y solo silas funciones ϕm(x) y todas sus derivadas convergen a ϕ0 y las correspondientes derivadas
Tesis de Maestrıa

56 4.1. Distribuciones temperadas y transformadas de Fourier
de ϕ0 convergen uniformemente con respecto a x en toda region acotada R de Rn. Esto
significa que los numeros Cpα que ocurren en (4.3) pueden elegirse independientementede x de tal forma que
|xp (Dαϕm −Dαϕ0)| < Cpα ∀m.Una funcion ϕ ∈ C∞(Rn) es de rapido decaimiento si
‖ϕ‖(N,α) = supx∈Rn
∣∣xNDαϕ∣∣ <∞ ∀N,∀α. (4.4)
Una sucesion (ϕj)∞j=1 ∈ S se dice que converge a cero en S si ‖ϕj‖(N,α) → 0 cuando
j →∞.
La razon de esta terminologıa es que, si ϕ ∈ S, entonces cada Dαϕ tiende a cero masrapido que |x|−N para toda N > 0 cuando |x| → ∞.
Las seminormas en (4.4) generan una topologıa; mas aun tenemos el siguiente resul-tado:
Proposicion 4.2. S es completo.
Demostracion: Sea (ϕk)∞k=1 una sucesion de Cauchy en S. Entonces
‖ϕk − ϕj‖(N,α) → 0 cuando k, j →∞ ∀N,∀α;
es decir, dado ε > 0 existe M ∈ N tal que ∀k, j > M
supx∈Rn
|x|N |∂αϕk(x)− ∂αϕj(x)| < ε. (4.5)
Debemos hallar una funcion ψ0 ∈ S tal que ‖ϕk − ψ0‖(N,α) → 0 cuando j → ∞ ∀N,∀α.De (4.5) se tiene que para toda x ∈ R
n
|∂αϕk(x)− ∂αϕj(x)| < ε ∀k, j > N , ∀αComo esto significa convergencia uniforme de ∂αϕk en R
n, para cada α existe ψα continuatal que
∂αϕk → ψα cuando k →∞ uniformemente en Rn.
Veamos que ψα = ∂αψ0 y que ‖ϕk − ψ0‖(N,α) → 0 cuando k →∞, ∀N,∀α.Notemos que para α = 0 ϕk → ψα uniformemente.
Sea α = ej = (0, . . . , 0, 1, 0, . . . , 0) con un 1 en el j-esimo lugar; entonces
ϕk(x+ tej)− ϕk(x) =
∫ t
0
∂jϕk(x+ sej)ds.
Tomamos lımite cuando k →∞ (y dividiendo por t):
1
t[ψ0(x+ tej)− ψ0(x)] =
1
t
∫ t
0
ψej(x+ sej)ds.
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 57
Tomando lımite cuando t→ 0 obtenemos
∂jψ0(x) = ψej(x).
Inductivamente, tenemos que ∂αψ0 = ψα ∀α.Basta ver que ‖ψk − ψ0‖(N,α) → 0 cuando k →∞ ∀N, ∀α. Para k, j > M se tiene
|x|N |∂αϕk(x)− ∂αϕj(x)| < ε ∀x ∈ Rn.
Mantenemos fija k > M y tomamos lımite cuando j →∞:
|x|N |∂αϕk(x)− ∂αψ0(x)| 6 ε, ∀x ∈ Rn.
Ası, para toda k > M tenemos ‖ϕk − ψ0‖(N,α) 6 ε. Por lo tanto, S es completo.
Un resultado no menos importante que el anterior es el siguiente:
Proposicion 4.3. i.- D es denso en S. Mas precisamente: dada ϕ ∈ S y dada ψ ∈ Dtal que
ψ(x) =
1 si |x| < 10 si |x| > 2
,
entonces, las funciones
ϕm(x) = ψ( xm
), m = 1, 2, . . .
son funciones de prueba en D y la sucesion ϕm(x) converge a ϕ(x) en el sentidode S, y verifica que
ϕm(x)→ ϕ(x), cuando m→∞ en S.
ii.- S ⊂ L∞, y la inyeccion es continua.
La demostracion de este resultado se basa en las normas definidas en (4.5) y la con-vergencia definida en S.
Funciones de Lento Crecimiento
Una funcion f(x) = f(x1, x2, . . . , xn) en Rn es de lento crecimiento si f(x), junto con
todas sus derivadas, crecen en infinito mas lento que algun polinomio. Es decir, existenconstantes, C, m y A tal que
|Dαf(x)| 6 C |x|m , |x| > A. (4.6)
4.1.2 Distribuciones Temperadas
Un funcional lineal y continuo T sobre S se llama distribucion de lento crecimiento odistribucion temperada, si a cada ϕ ∈ S, se le asigna un numero complejo 〈T, ϕ〉 con laspropiedades:
Tesis de Maestrıa

58 4.1. Distribuciones temperadas y transformadas de Fourier
1. 〈T, c1ϕ1 + c2ϕ2〉 = c1 〈T, ϕ1〉+ c2 〈T, ϕ2〉 ,
2. limm→∞
〈T, ϕm〉 = 0, para toda sucesion nula ϕm(x) ∈ S.
Denotaremos como S′ al conjunto de distribuciones temperadas, o bien al dual de S.
Se sigue de la definicion de convergencia en D y en S que una sucesion ϕm(x) queconverge a ϕ(x) en el sentido de D tambien converge a ϕ(x) en el sentido de S, pues alestar todas contenidas en un compacto fijo la convergencia uniforme de las ϕα
m hacia ϕα
implica la convergencia uniforme de las xNϕαm hacia xNϕα, puesto que la potencia esta
acotada en el compacto fijo.
Ası, todo funcional lineal y continuo en S tambien lo es en D y, por lo tanto S′ ⊂ D′.
En efecto, si T ∈ S′, como D ⊂ S, 〈T, ϕ〉 esta definida para toda ϕ ∈ D. Ademas,
si limn→∞
ϕn = 0 en D, se tiene que limn→∞
ϕn = 0 en S, luego limn→∞
〈T, ϕn〉 = 0. Por otra
parte, si T es temperada, el conocimiento que se tiene de 〈T, ψ〉 ∀ψ ∈ D nos permite, porcontinuidad, definir 〈T, ϕ〉 ∀ϕ ∈ S.
De hecho, tenemos el siguiente resultado:
Proposicion 4.4. Dada F ∈ S′ entonces F |D ∈ D′.
Para mostrar la validez de este resultado basta probar que si ϕn → ϕ en D entonces〈F, ϕn〉 → 〈F, ϕ〉 .
Ası, si S′ = F ∈ D′ : F se extiende continuamente a S, entonces S
′ ⊂ D′.
Afortunadamente, muchas de las distribuciones en D ya discutidas son distribucionesen S. Solo aquellas distribuciones en D que crecen muy rapido al infinito no pueden serextendidas a S.
Diremos que una funcion localmente integrable es temperada si como distribucion loes. De hecho, ası como las funciones en L1
loc forman un subconjunto especial de D′, lasfunciones de lento crecimiento juegan ese papel en S
′.
El resultado correspondiente es:
Teorema 4.1. Toda funcion f(x) de lento crecimiento genera una distribucion a travesde la formula:
〈f, ϕ〉 =
∫
Rn
f(x)ϕ(x)dx, ϕ ∈ S. (4.7)
Demostracion: Claramente, es un funcional lineal. Para probar la continuidad, debe-mos mostrar que si ϕm es una sucesion nula en S, entonces 〈f, ϕm〉 → 0, m→∞.
Ahora, para cada m,
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 59
∫
Rn
f(x)ϕm(x)dx =
∫
Rn
f(x)
(1 + |x|2)l
[(1 + |x|2)lϕm(x)
]dx,
donde l > 0 es un entero.
Cuando l es suficientemente grande,f(x)
(1 + |x|2)les absolutamente integrable, y tene-
mos ∣∣∣∣∫
Rn
f(x)ϕm(x)dx
∣∣∣∣ 6 sup∣∣(1 + |x|2)lϕm(x)
∣∣∫
Rn
∣∣∣∣f(x)
(1 + |x|2)l
∣∣∣∣dx.
El lado derecho se aproxima a cero cuando ϕm → 0 para toda ϕm nula, lo cual prueba lacontinuidad.
Ahora presentamos algunos ejemplos de distribuciones en S′.
Ejemplo 4.1. Sea U ⊂ Rn abierto y definamos
E ′(U) = F ∈ D′(U) | sopF es compactoEntonces E ′ ⊂ S
′.
Sean F ∈ E ′ y (ϕn)∞n=1 ⊂ S tal que ϕn → 0 en S, es decir,
‖ϕn‖(N,α) = supx∈Rn
|x|N |∂αϕn(x)| → 0, cuando n→∞ ∀N,∀α.
Entonces, ϕn converge en C∞ a 0. Ası,
〈F, ϕn〉 → 〈F, 0〉 cuando n→∞.Por lo tanto, F ∈ S
′.
Ejemplo 4.2. Lp ⊂ S′ para 1 6 p 6 ∞. Sean f ∈ Lp y (ϕk)
∞k=1 ⊂ S tal que ϕk →
0, cuando k →∞ en S, entonces ‖ϕk‖(N,α) → 0 cuando k →∞ para toda N y para todaα.
Luego,
|〈f, ϕk〉| =∣∣∣∣∫
Rn
f(x)ϕk(x)dx
∣∣∣∣ 6∫
Rn
|f(x)| |ϕk(x)|dx 6 ‖f‖p ‖ϕk‖q ,
donde p y q son exponentes conjugados.
Si q =∞, es decir p = 1 ya terminamos pues ‖ϕk‖q = ‖ϕk‖∞ = ‖ϕk‖(0,0) .
Supongamos que 1 < p 6∞, ası 1 6 q <∞, tenemos:
‖ϕk‖qq =
∫
Rn
|ϕk(x)|qdx =
∫
Rn
|x|Nq |ϕk(x)|qdx
|x|Nq
6 ‖ϕk‖q(N,0)
∫
n
dx
|x|Nq
< CNq ‖ϕk‖(N,0) .
Tesis de Maestrıa

60 4.1. Distribuciones temperadas y transformadas de Fourier
De aquı que |〈f, ϕk〉| 6 ‖f‖p ‖ϕk‖(N,0) → 0 cuando k →∞.Por lo tanto, f ∈ S
′.
Ejemplo 4.3. Sea f(x) = ex, x ∈ R. f ∈ C∞ ⊂ L1loc, ası f ∈ D′ pero f /∈ S
′.
Construiremos una sucesion (ψj)∞j=1 ⊂ S tal que ψj → 0 pero 〈f, ψj〉 no converja a
cero.
Sea ψ ∈ D tal que∫
Rψ = 1.
Sea ψj(x) = e−xψ(x− j), ψj ∈ S por que ψj ∈ C∞ y
|x|N ∂α(ψj) = |x|N ∂α(e−xψ(x− j)) 6 |x|N∑
β6α
Cαβ
∣∣∂βe−x∣∣ ∣∣∂α−βψ(x− j)
∣∣
= |x|N∑
β6α
Cαβe−x∣∣∂α−βψ(x− j)
∣∣
sopψ ⊂ (−B,B), para algun B > 0.
Si j > 2B, x− j 6 B − j < −B entonces ψ(x− j) = 0 para toda x ∈ sopψ.
Por lo tanto, ‖ψj‖(N,α) → 0 cuando j →∞ para toda N y para toda α.
Ası, ψj → 0 en S. Pero
〈f, ψj〉 =
∫
R
exe−xψ(x− j)dx =
∫
R
ψ(x− j)dx = 1,
es decir, 〈f, ψj〉 no converge a 0.
Por lo tanto, f /∈ S′.
Ejemplo 4.4. Sea ahora f(x) = ex cos ex, f ∈ S′.
f(x) = g′(x) donde g(x) = sen ex.
Si (ϕk)∞k=1 ⊂ S tal que ϕk → 0 en S, es decir, ‖ϕk‖(N,α) → 0.
|〈f, ϕk〉| =∣∣∣∣∫
R
g′(x)ϕk(x)dx
∣∣∣∣ =
∣∣∣∣∫
R
g(x)ϕ′k(x)dx
∣∣∣∣
6
∫
R
|sen ex| |ϕ′k(x)|dx
6
∫|ϕ′
k(x)| (1 + |x|)2 dx
(1 + |x|)2
6 ‖ϕk‖(2,1)
∫dx
(1 + |x|)2→ 0 cuando k →∞.
Ası, S′ puede contener ciertas funciones en L1
loc que no son de lento crecimiento.
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 61
Como en el caso de D′, definimos convergencia en S′ como convergencia debil. La
definicion exacta es:
Definicion 4.2. La sucesion Fm de distribuciones en S′ converge a F ∈ S
′ si para todaϕ ∈ S, se tiene que 〈Fm, ϕ〉 → 〈F, ϕ〉 cuando m→∞.
De esta definicion y ya que S′ ⊂ D′, se sigue que una sucesion de distribuciones Fm
que converge en S′ a una distribucion F ∈ S
′, tambien converge en D′ a una distribucionF .
Resumamos los resultados anteriores en el siguiente teorema:
Teorema 4.2. D ⊂ S y S′ ⊂ D
′. Mas aun, convergencia en D implica convergencia enS, y convergencia debil en S
′ implica convergencia debil en D′.
Las operaciones que fueron definidas para distribuciones enD′ son validas en S′ porque
S′ es un subespacio de D′.
Finalmente, tenemos las herramientas necesarias para definir la transformada deFourier.
4.1.3 Transformada de Fourier
Transformada de Fourier de Funciones de Prueba
Consideremos primero la transformada de Fourier de las funciones de prueba
ϕ(ξ) = F [ϕ(x)] =
∫eiξxϕ(x)dx, ϕ ∈ S (4.8)
donde ξx = ξ1x1 + ξ2x2 + · · ·+ ξnxn y ξ1, . . . , ξn son numeros reales.
La transformada inversa es
ϕ(x) = F−1[ϕ(ξ)] =
1
(2π)n
∫e−iξxϕ(ξ)dξ. (4.9)
Teorema 4.3. Si ϕ ∈ S, entonces ϕ(ξ) existe y tambien esta en S.
Demostracion: Por el rapido decaimiento de ϕ(x) en |x| =∞, la integral∫ ∞
−∞(ix)keiξxϕ(x)dx, k = 0, 1, 2, . . .
converge absolutamente. Esta integral es el resultado de diferenciar k veces, bajo el signode integral, la expresion para ϕ. Por lo tanto, representa la k-esima derivada de ϕ,
Tesis de Maestrıa

62 4.1. Distribuciones temperadas y transformadas de Fourier
dkϕ(ξ)
dξk=
∫ ∞
−∞(ix)keiξxϕ(x)dx =
[(ix)kϕ
](ξ).
De esta relacion se sigue que∣∣∣∣dkϕ(ξ)
dξk
∣∣∣∣ 6∫ ∞
−∞
∣∣xkϕ∣∣dx,
la cantidad del lado izquierdo es acotada para toda ξ. Tambien,
(iξ)p dkϕ(ξ)
dξk=
∫ ∞
−∞(ix)kϕ(x)
dp
dxpeiξxdx = (−1)p
∫ ∞
−∞
[dp
dxp(ix)kϕ(x)
]eiξxdx,
donde hicimos uso de integracion por partes. Como el termino entre corchetes esta en
S, la funcion
[dp
dxpϕ(x)
]eiξx es absolutamente integrable, y por lo tanto
∣∣∣∣ξp dkϕ(ξ)
dξk
∣∣∣∣ es
acotado para toda ξ. Los multi-ındices k y p son arbitrarios. Ası, ϕ(ξ) ∈ S.
Ası, los miembros de S son mapeados por la transformada de Fourier en miembros deS. La operacion transformada inversa F−1 tiene propiedades analogas. Mas aun, por laformula de inversion, tenemos ∫ ∞
−∞eixzϕ(z)dz = 2πϕ(−x)
o
[ϕ] = 2πϕ(−x). (4.10)
Esto muestra que toda funcion en S es una transformada de Fourier de alguna funcionen S. Tambien, si ϕ = 0, entonces ϕ = 0; es decir, la transformada de Fourier es unica.Ası, la transformada de Fourier es un mapeo lineal de S en S.
Este mapeo tambien es continuo. De hecho, sea ϕm → ϕ cuando m → ∞ en S.Entonces, del analisis previo encontramos que
∣∣∣∣ξp dk
dξk[ϕm − ϕ] (ξ)
∣∣∣∣ 6
∫ ∞
−∞
∣∣∣∣dk
dxk[xp(ϕm − ϕ)]
∣∣∣∣dx
6 sup
∣∣∣∣dk
dxk[xp(ϕm − ϕ)]
∣∣∣∣(1 + x2)l
∫dx
(1 + x2)l.
De esta desigualdad se sigue que
ξp dk
dxkϕm → ξp dk
dxkϕ,
con lo que queda probado el teorema.
El resultado analogo es valido para la transformada de Fourier inversa. Podemosresumir estos resultados en el siguiente
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 63
Teorema 4.4. La transformada de Fourier y su inversa son mapeos lineales, continuosy 1-1 de S en S.
Para obtener la transformada de Fourier de una distribucion temperada, necesitamosalgunas formulas especificas para la transformada de Fourier de ϕ, las cuales discutiremosenseguida.
Usando integracion por partes, tenemos que
[dkϕ
dxk
](ξ) = (−iξ)k
∫ ∞
−∞ϕ(x)eiξxdx = (−iξ)kϕ(ξ), (4.11)
o [(id
dx
)k
ϕ
](ξ) = ξkϕ(ξ). (4.12)
De la relacion ∫ ∞
−∞(ix)kϕ(x)eiξxdx =
dk
dξk
∫ ∞
−∞ϕ(x)eiξxdx,
tenemos la k-esima derivada de la transformada de Fourier,
[(ix)kϕ
](ξ) =
(d
dξ
)k
ϕ(ξ), (4.13)
o[xkϕ
](ξ) =
(− id
dξ
)k
ϕ(ξ). (4.14)
Una traslacion de ϕ(x) a τaϕ(x) en S nos lleva a un factor de multiplicacion eiaξ, elcual se puede ver rapidamente sustituyendo x− a por x en (4.8).
Claramente, ∫ ∞
−∞τaϕ(x)eiξxdx = eiaξ
∫ ∞
−∞ϕ(y)eiξydy,
o
[ϕ(x− a)] (ξ) = eiaξϕ(ξ). (4.15)
Por otro lado, la traslacion de la transformada de Fourier es
[ϕ] (ξ + a) =[eiaξϕ
](ξ), (4.16)
lo cual se verifica al reemplazar ξ por ξ + a en (4.8).
Tesis de Maestrıa

64 4.1. Distribuciones temperadas y transformadas de Fourier
En el caso n-dimensional es analogo; las formulas son las siguientes:
[ϕ] (ξ) = (2π)nϕ(−ξ),[Dαϕ] (ξ) = (−iξ)αϕ(ξ),
[(iD)αϕ] (ξ) = ξαϕ(ξ),
[(ix)αϕ] (ξ) = Dαϕ(ξ),
[xαϕ] (ξ) = (−iD)αϕ(ξ),
[ϕ(x− a)] (ξ) = eiaξϕ(ξ),
[ϕ] (ξ + a) =[eiaxϕ
](ξ).
Con estas propiedades de la transformada de Fourier podemos obtener varias formulasde transformadas de Fourier, entre ellas tenemos la siguiente que sera utilizada mas ade-lante:
Ejemplo 4.5.[e−ax2
]=
√π
ae
−ξ2
4a
En otras palabras, debemos mostrar que⟨[e−ax2
], ϕ(x)
⟩=
⟨√π
ae
−ξ2
4a , ϕ(x)
⟩.
Entonces tenemos que,⟨[e−ax2
], ϕ(x)
⟩=
⟨e−ax2
, ϕ(x)⟩
=
∫ ∞
−∞e−ax2
ϕ(x)dx
=
∫ ∞
−∞e−ax2
∫ ∞
−∞eiξxϕ(ξ)dξdx
=
∫ ∞
−∞ϕ(ξ)
∫ ∞
−∞e−ax2+iξxdxdξ.
Analicemos la integral∫∞−∞ e−ax2+iξxdx. Haciendo el cambio σ =
√ax se sigue que:
∫ ∞
−∞e−ax2+iξxdx =
1√a
∫ ∞
−∞e−σ2+i σ√
aξ± ξ2
4adσ
=1√ae−
ξ2
4a
∫ ∞
−∞e−(σ2+2σi ξ
2√
a+(i ξ
2√
a)2)dσ
=1√ae−
ξ2
4a
∫ ∞
−∞e−(σ+i ξ
2√
a)2dσ
Ahora, sea Σ = σ + i ξ2√
ay analicemos que sucede con
∫Im(Σ)=a
e−Σ2dΣ. Sea C el
contorno representado por las flechas en la siguiente figura: entonces∫
Ce−Σ2
dΣ = 0, pues
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 65
C+RC−
R
C ′R
C ′′Rτ a
R−R
ImΣ
ReΣ
Figura 4.1: Contorno C
∫
C±R
e−Σ2
dΣ =
∫e−(R+iτ)2dτ =
∫e−R2
eτ2−2iRτdτ → 0,
cuando R→∞. Entonces,
0 = lim
∫
CR
e−Σ2
dΣ =
∫e−σ2
dσ −∫
Im(Σ)=a
e−ξ2
dξ,
ası ∫ ∞
−∞e−σ2
dσ =
∫
Im(Σ)=a
e−ξ2
dξ.
De aquı que:
1√ae−
ξ2
4a
∫ ∞
−∞e−(σ+i ξ
2√
a)2dσ =
1√ae−
ξ2
4a
∫ ∞
−∞e−σ2
dσ =
√π
ae−
ξ2
4a .
Ası tenemos el resultado deseado, es decir:⟨[e−ax2
], ϕ(x)
⟩=
⟨√π
ae−
ξ2
4a , ϕ(x)
⟩.
Por lo tanto,[e−ax2
]=√
πae−
ξ2
4a
Transformada de Fourier de Distribuciones Temperadas
Anteriormente, hicimos notar las dificultades que se presentan al tratar de definir latransformada de Fourier de una distribucion en D. Cuando utilizamos las funciones deprueba de S y distribuciones temperadas estas dificultades desaparecen.
Ası, tenemos la siguiente definicion:
Definicion 4.3. Si F es una distribucion temperada, su transformada de Fourier es:⟨F , ϕ
⟩= 〈F, ϕ〉 , ϕ ∈ S (4.17)
La funcional definida en el lado derecho de (4.17) esta bien definida porque ϕ ∈ S, locual ya fue mostrado en el Teorema 4.3. Claramente es lineal. Para probar la continuidad,observemos del Teorema 4.3 que, si ϕm → 0 entonces ϕm → 0 tambien.
Tesis de Maestrıa

66 4.1. Distribuciones temperadas y transformadas de Fourier
Ası, si ϕm → 0 para toda ϕm ∈ S entonces 〈T, ϕm〉 → 0 cuando m→∞.
De (4.10) y la Definicion 4.3 tenemos que[F]
= 2πF (−x). Por lo tanto, toda
distribucion en S′ es una transformada de Fourier de algun miembro de S
′. Mas aun, estarelacion implica ⟨
F , ϕ(x)⟩
=⟨F (x), ϕ(x)
⟩= 2π 〈F (x), ϕ(−x)〉 .
Un resultado que debemos destacar es el siguiente:
Teorema 4.5. Si F ∈ S′ entonces F (F ) ∈ S
′ . En otras palabras, F (F ) es una dis-tribucion temperada cada vez que F lo sea.
Demostracion:
La F esta bien definida para cada ϕ ∈ S, por el teorema 4.3.
Como la transformada de Fourier y F ∈ S son operadores lineales entonces F (F ) eslineal.
Por ultimo, F (F ) es continua, ya que si ϕi → 0 entonces ϕi → 0 en S; de aquı que〈F, ϕ〉 → 0, ya que F es continua.
El mismo resultado es valido para la transformada de Fourier inversa, definida como:
⟨F
−1(F ), ϕ⟩
=⟨F,F−1(ϕ)
⟩. (4.18)
Sea Fm(x) una sucesion de distribuciones en S′ que converge debilmente en S
′ a
una distribucion F . Entonces, la sucesionFm(ξ)
tambien converge en S
′, y su lımite
distribucional es F (ξ). Claramente,
limm→∞
⟨Fm(x), ϕ(x)
⟩= lim
m→∞〈Fm(ξ), ϕ(ξ)〉 = 〈F (ξ), ϕ(ξ)〉 =
⟨F (x), ϕ(x)
⟩.
con lo que queda probada nuestra afirmacion.
Es importante que la definicion (4.17) sea consistente con la definicion clasica si laultima es aplicable, por lo que tenemos el siguiente resultado.
Teorema 4.6. La definicion (4.17) es consistente con la definicion clasica para la trans-formada de Fourier de una funcion ordinaria f(x).
Demostracion:
⟨f , ϕ
⟩= 〈f, ϕ〉 =
∫ ∞
−∞f(x)dx
∫ ∞
−∞eixyϕ(y)dy
=
∫ ∞
−∞ϕ(y)dy
∫ ∞
−∞f(x)eixydx =
∫ ∞
−∞F (y)ϕ(y)dy,
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 67
donde F (x) es la transformada de Fourier de f(x).
De (4.18) se siguen las ecuaciones (4.11)-(4.16) para distribuciones temperadas. Lasformulas correspondientes son:
[dαF
dxα
](ξ) = (−iξ)αF (ξ),
[(id
dx
)α
F
](ξ) = ξαF (ξ),
[(ix)αF ] (ξ) =
(d
dξ
)α
F (ξ),
[xαF ] (ξ) =
(− id
dξ
)α
F (ξ),
[F (x− a)] (ξ) = eiaξF (ξ),
[F ] (ξ + a) =[eiaxF
](ξ)
Analogamente se tienen los resultados para el caso n-dimensional.
Finalizaremos esta seccion con unos ejemplos.
Ejemplo 4.6. Analicemos la transformada de Fourier de la delta de Dirac, δ. Sea ϕ ∈ S,entonces ⟨
δ, ϕ⟩
= 〈δ, ϕ〉 = ϕ(0) =
∫
Rn
ϕ(x)dx = 〈1, ϕ〉
Por lo tanto, δ = 1.
Ejemplo 4.7. Analicemos la transformada de Fourier de la distribucion constante 1: Seaϕ ∈ S, entonces
⟨1, ϕ⟩
= 〈1, ϕ〉 =
∫
Rn
ϕ(x)dx = [ϕ] (0) = ϕ(0) = 〈δ, ϕ〉
Por lo tanto, 1 = δ.
Ejemplo 4.8. La transformada de Fourier que no puede definirse de manera clasicacomo una integral puede determinarse como lımites de regularizaciones. Consideremos lafuncion H(x). Claramente no podemos definir su transformada de Fourier como
∫ ∞
0
eiξxdx.
Observe, sin embargo que
H(t) = limε→0
H(x)e−εx
Tesis de Maestrıa

68 4.2. Producto Directo
en el sentido de distribuciones temperadas, y⟨H(x), ϕ(x)
⟩= 〈H(x), ϕ(x)〉 =
⟨limε→0
H(x)e−εx, ϕ(x)⟩
= limε→0
⟨H(x)e−εx, ϕ(x)
⟩= lim
ε→0
⟨H(x), e−εxϕ(x)
⟩
= limε→0
∫ ∞
0
e−εx
∫ ∞
−∞ϕ(ξ)eixξdξdx
= limε→0
∫ ∞
−∞ϕ(ξ)
∫ ∞
0
e−εx+ixξdxdξ.
Haciendo el cambio de variable u = (ε− iξ)x tenemos que
limε→0
∫ ∞
−∞ϕ(ξ)
∫ ∞
0
e−εx+ixξdxdξ = limε→0
∫ ∞
−∞
ϕ(ξ)
ε− iξ
∫ ∞
0
e−ududξ
= limε→0
∫ ∞
−∞
ϕ(ξ)
ε− iξ dξ.
Para δ > 0 tenemos:
limε→0
∫ ∞
−∞
ϕ(ξ)
ε− iξ dξ =
∫
|ξ|>δ
−ϕ(ξ)
iξdξ +
∫ δ
−δ
−ϕ(ξ)− ϕ(0)
iξdξ + lim
ε→0
∫ δ
−δ
ϕ(0)
ε− iξ dξ
=
∫
|ξ|>δ
−ϕ(ξ)
iξdξ +
∫ δ
−δ
−ϕ(ξ)− ϕ(0)
iξ+ πϕ(0)
=
∫
|ξ|>δ
iϕ(ξ)
ξdξ +
∫ δ
−δ
i [ϕ(ξ)− ϕ(0)]
ξdξ + πϕ(0)
= i
[∫
|ξ|>δ
ϕ(ξ)
ξdξ +
∫ δ
−δ
ϕ(ξ)− ϕ(0)
ξdξ
]+ πϕ(0)
= iP 1
ξ+ πδ(ξ),
por lo tanto, F (H(x)) = πδ(ξ) + iP 1ξ.
4.2 Producto Directo
Sean Rm y R
n espacios Euclidianos de dimensiones m y n respectivamente, denotemoscomo x = (x1, . . . , xm) y y = (y1, . . . , yn) a los puntos en R
m y Rn respectivamente.
Entonces un punto en Rm+n = R
m × Rn tiene la forma (x, y) = (x1, . . . , xm, y1, . . . , yn).
Mas aun, denotemos por Dm, Dn y Dm+n, los espacios de funciones de prueba con soportecompacto en R
m, Rn y R
m+n respectivamente. Cuando f y g son funciones localmente
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 69
integrables en los espacios Rm y R
n, entonces la funcion fg es tambien una funcionlocalmente integrable en R
m+n. Su distribucion regular se define como:
〈f(x)g(y), ϕ(x, y)〉 =
∫f(x)
∫g(y)ϕ(x, y)dydx
= 〈f(x), 〈g(y), ϕ(x, y)〉〉 (4.19)
o
〈g(y)f(x), ϕ(x, y)〉 =
∫g(y)
∫f(x)ϕ(x, y)dxdy
= 〈g(y), 〈f(x), ϕ(x, y)〉〉 (4.20)
para ϕ ∈ Dm+n.
Denotemos por F1⊗F2 al producto directo de las distribuciones F1 ∈ D′m y F2 ∈ D′n,ası por (4.19), se sigue que para x ∈ R
m y y ∈ Rn
〈F1(x)⊗ F2(y), ϕ(x, y)〉 = 〈F1(x), 〈F2(y), ϕ(x, y)〉〉 , ϕ(x, y) ∈ Dm+n (4.21)
Para revisar si el lado derecho de esta ecuacion define una funcional lineal y continuasobre Dm+n tenemos el siguiente resultado:
Lema 4.1. La funcion ψ(x) = 〈F2(y), ϕ(x, y)〉, donde F2 ∈ D′n y ϕ(x, y) ∈ Dm+n, es unafuncion de prueba en Dm y
Dαψ(x) = 〈F2(ψ), Dαxϕ(x, y)〉 (4.22)
para todo α multi-ındice, donde Dαx denota diferenciacion con respecto a (x1, . . . , xm)
unicamente.
Tambien, si la sucesion ϕl(x, y) → ϕ(x, y) cuando l → ∞ en Dm+n, entonces lasucesion ψl(x) = 〈F2(y), ϕl(x, y)〉 → ψ(x) cuando l→∞ en Dm.
Demostracion: Para toda x ∈ Rm, ϕ(x, y) ∈ Dm y esta bien definida en R
m.
Para mostrar que es continua, fijemos x y sea xl tal que xl → x cuando l → ∞.Entonces,
ϕ(xl, y)→ ϕ(x, y), y ∈ Rn (4.23)
porque los soportes de ϕ(xl, y) son acotados en Rn independientemente de l y para toda
q se sigue que
Dqyϕ(xl, y)→ Dq
yϕ(x, y), cuando l→∞, y ∈ Rn.
Ahora, apelando a la continuidad de la funcional F2(y) en Dn encontramos, de (4.23), que
ψl(x) = 〈F2(y), ϕ(xl, y)〉 → 〈F2(y), ϕ(x, y)〉 = ψ(x).
Tesis de Maestrıa

70 4.2. Producto Directo
Esto prueba que ψ(x) es una funcion continua.
Para probar (4.22) nuevamente fijamos un punto x en Rm y elegimos hi =(0,0,. . .,h,. . .,
0), donde h se localiza en el i-esimo lugar de la fila. Entonces
χi(y) =1
h[ϕ(x+ hi, y)− ϕ(x, y)]→ ∂ϕ(x, y)
∂xi
(4.24)
cuando h → 0, en Dm. Tambien, los soportes de χi son acotados en Rn independiente-
mente de h, y tenemos, que para toda q
Dqχi(y) =1
h
[Dq
yϕ(x+ hi, y)−Dqyϕ(x, y)
]→ Dq
y
∂ϕ(x, αy)
∂xi
, cuando h→ 0, y ∈R
n.
Utilizando (4.24) y la continuidad de F2(y) observamos que
ψ(x+ hi)− ψ(x)
h=
1
h[〈F2(y), ϕ(x+ hi, y)〉 − 〈F2(y), ϕ(x, y)〉]
=
⟨F2(y),
ϕ(x+ hi, y)− ϕ(x, y)
h
⟩
=⟨F2, χ
i⟩→⟨F2(y),
∂ϕ(x, y)
∂xi
⟩, cuando h→ 0.
Ası, (4.22) es valido para α = (0, . . . , 0, 1, 0, . . . , 0), donde 1 se localiza en la i-esimacoordenada. Repitiendo las aplicaciones de los pasos anteriores, obtenemos (4.22) en todasu generalidad.
De este modo probamos que ψ ∈ C∞(Rm). Basta probar que ψ tiene soporte com-pacto, pero esto se sigue del hecho de que ϕ(x, y) = 0 para |x| > R; para estos valores dex, ψ(x) = 〈F2(y), 0〉. Ası, ψ(x) es una funcion de prueba.
Finalmente, para probar la tercera parte es suficiente con mostrar que si ϕl(x, y) esuna sucesion nula entonces tambien lo es ψl(x) . Ahora, los soportes de ϕl(x, y) estanacotados en R
m+n independientemente de l, entonces los soportes de ψl(x) tambienestan acotados independientemente de l. Entonces, solo tenemos que probar que
Dαψl(x)→ 0, cuando l→∞, x ∈ Rm. (4.25)
Supongamos que esto no es valido; entonces podemos encontrar un numero ε0 > 0,un multi-ındice α0 y una sucesion de puntos xl tal que
Dα0 [ψl(xl)] > ε0, l = 1, 2, . . . (4.26)
Como los soportes de ψl(x, y) son acotados en Rm independientemente de l, se sigue
que la sucesion xl tambien es acotada en Rm. Por el teorema de Bolzano-Weierstrass,
podemos elegir una subsucesion convergente xlj → x0 cuando j →∞. Entonces,
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 71
Dα0x ϕlj(xlj , y)→ 0 cuando j →∞.
Consecuentemente, la distribucion F2(y) satisface la relacion
Dα0ψlj(xlj) =⟨F2(y), D
α0x ϕlj(xlj , y)
⟩− 〈F2(y), 0〉 = 0, (4.27)
lo que nos lleva a una contradiccion. Por lo tanto el lema queda demostrado.
Regresando a la definicion (4.21), y usando el Lema 4.1 encontramos que ψ(x) =〈F2(y), ϕ(x, y)〉 ∈ Dm ∀ϕ ∈ Dm+n. Ası, el lado derecho de (4.21), digamos 〈F1, ψ〉, sedefine para cualesquiera distribuciones F1 y F2 sobre Dm+n. La linealidad de este funcionalse sigue de la linealidad de las funcionales F1 y F2.
Para probar la continuidad de este funcional, sea la sucesion ϕl → ϕ cuando l→∞.en Dm+n. Entonces por el Lema 4.1 tenemos:
〈F2(y), ϕl(x, y)〉 → 〈F2(y), ϕ(x, y)〉 cuando l→∞ en Dm.
Como el funcional es continuo, tenemos
〈F1(x), 〈F2(y), ϕl(x, y)〉〉 → 〈F1(x), 〈F2(y), ϕ(x, y)〉〉 cuando l→∞, (4.28)
Esto prueba la continuidad del funcional definido por el lado derecho de (4.21) yF1(x)⊗ F2(y) es una funcion generalizada en D′m+n.
Es natural preguntarnos como operar el producto directo si lo combinamos con otrasoperaciones. Ahora mencionaremos algunas de ellas (ver [15]):
1. Conmutatividad: El producto directo es conmutativo.
Para probar este resultado para cualquier funcion de prueba ϕ(x, y), se hace uso delhecho de que Dm⊗Dn es denso en Dm+n. Para una demostracion de este resultadoconsultar [15]
2. Continuidad: Si Fl → F cuando l→∞ en D′m, entonces
Fl(x)⊗ F1(y) → F (x)F1(y),
en D′m+n.
3. Asociatividad: Para F1 ∈ D′m, F2 ∈ D′n, y F3 ∈ D′p tenemos
F1(x)⊗ [F2(y)⊗ F3(z)] = [F1(x)⊗ F2(y)]⊗ F3(z).
4. Soporte:
sop (F1 ⊗ F2) = (sopF1)× (sopF2) .
5. Diferenciacion:
Dαx [F1(x)⊗ F2(y)] = [DαF1(x)⊗ F2(y)] (4.29)
Tesis de Maestrıa

72 4.2. Producto Directo
6. Multiplicacion por una Funcion C∞. Para a(x) ∈ C∞ tenemos
a(x) [F1(x)⊗ F2(y)] = [a(x)F1(x)]⊗ F2(y) (4.30)
7. Traslacion:(F1 ⊗ F2) (x+ h, y) = F1(x+ h)⊗ F2(y) (4.31)
Ahora mostraremos algunos ejemplos que ilustren estas propiedades del productodirecto.
Ejemplo 4.9. El producto directo de la distribucion Delta en Rm con la distribucion
Delta en Rn nos da la funcion delta en R
n+m :
Para ϕ(x, y) ∈ Rn+m se sigue que
〈δ(x)⊗ δ(y), ϕ(x, y)〉 = 〈δ(x), 〈δ(y), ϕ(x, y)〉〉= 〈δ(x), ϕ(x, 0)〉= ϕ(0, 0)
= 〈δ(x, y), ϕ(x, y)〉 (4.32)
Ejemplo 4.10. Sea H(x) la funcion de Heaviside de n variables:
H(x) =
1 si x1 > 0, x2 > 0, . . . , xn > 0,0 en otro caso.
,
Claramente, H(x) es el producto directo de H(x1)⊗H(x2)⊗ · · · ⊗H(xn). Derivando, y
usando el hecho de quedH(xi)
dxi
= δ(xi), tenemos
∂nH
∂x1∂x2 · · · ∂xn
= δ(x1, x2, . . . , xn). (4.33)
4.2.1 El Producto Directo de Distribuciones Temperadas
Sean F1 ∈ S′m, x ∈ R
m y F2 ∈ S′n, y ∈ R
n. Como S′ ⊂ D′, el producto directo
F1(x) ⊗ F2(y) ∈ D, (x, y) ∈ Rm+n = R
m × Rn. Nuestro objetivo es probar que F1(x) ⊗
F2(y) ∈ S′m+n. Por la definicion del funcional F1(x)⊗ F2(y), donde ahora ϕ(x, y) ∈ S,
〈F1(x)⊗ F2(y), ϕ(x, y)〉 = 〈F1(x), 〈F2(y), ϕ(x, y)〉〉 (4.34)
Mostraremos que el lado derecho de (4.34) es un funcional lineal y continuo en Sm+n.
Procedemos como antes.
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 73
Lema 4.2. La funcion ψ(x) = 〈F2(y), ϕ(x, y)〉, donde F2 ∈ S′n, ϕ ∈ S
m+n, es una funcionde prueba en S
m, yDαψ(x) = 〈F2(y), D
αxϕ(x, y)〉 , (4.35)
es valido para todos los multi-ındices α.Mas aun, si la sucesion en S
m+n ϕl(x, y) → ϕ cuando l → ∞, entonces ϕl(x) =〈Fy, ϕl(x, y)〉 → 〈F2(y), ϕ(x, y)〉 en S
La prueba de este resultado es analoga al Lema 4.1 de la seccion 4.2. Muchas de laspropiedades que son validas para el producto directo en D′m+n tambien valen para S
′m+n
y su prueba es similar.
4.2.2 La Transformada de Fourier del Producto Directo de Dis-tribuciones Temperadas
Sean F1 ∈ S′m y F2 ∈ S
′n, entonces
[F1 ⊗ F2 ] = F1 ⊗ F2. (4.36)
Para ϕ(u, v) ∈ Sm+n
⟨[F1(x)⊗ F2(y)] (u, v), ϕ(u, v)
⟩= 〈F1(x)⊗ F2(y), ϕ〉= 〈F1(x)⊗ F2(y),FvFu [ϕ] (x, y)〉= 〈F1(x), 〈F2(y),FvFu [ϕ] (x, y)〉〉 , (4.37)
donde Fu y Fv son la transformada de Fourier de ϕ para los argumentos x y y respecti-vamente, entonces
FvFu [ϕ] (x, y) =
∫
Rm
eivy
∫
Rn
eiuxϕ(u, v)dudv.
Ası,⟨[F1(x)⊗ F2(y)] (u, v), ϕ(u, v)
⟩=
⟨F1(x),
⟨F2(v),Fu [ϕ] (x, v)
⟩⟩
=⟨F1(x)⊗ F2(v),Fu [ϕ] (x, v)
⟩
=⟨Fx
[F1(x)⊗ F2(v)
], ϕ⟩
=⟨F2(v), 〈F1(x),Fu [ϕ] (x, v)〉
⟩
=⟨F2(v),
⟨F1(u), ϕ(u, v)
⟩⟩
=⟨F1(u)⊗ F2(v), ϕ(u, v)
⟩,
lo que prueba (4.36).
Tesis de Maestrıa

74 4.3. La Convolucion
Ejemplo 4.11. Para el caso n = 2, considere la funcion H(x, y),
H(x, y) =
1 si x > 0, y > 00 en otro caso
,
lo que podemos escribir como H(x, y) = H(x)⊗H(y). Cuando usamos (4.36) y el ejemplo4.8 tenemos:
[H(x, y)] = [H(x)⊗H(y)] = H(x)⊗ H(y)
=
(πδ(u) + iP
(1
u
))⊗(πδ(v) + iP
(1
v
)).
4.3 La Convolucion
La convolucion f ∗ g de dos funciones f y g, ambas en Rn, se define como
(f ∗ g) (x) =
∫
Rn
f(y)g(x− y)dy. (4.38)
Es claro que
f ∗ g =
∫
Rn
f(y)g(x− y)dy =
∫
Rn
g(y)f(x− y)dy = g ∗ f (4.39)
siempre que la convolucion exista. Supongamos que las funciones f , g ∈ L1loc.
Entonces f ∗ g ∈ L1loc y por lo tanto define una distribucion regular 〈f ∗ g, ϕ〉,
〈f ∗ g, ϕ〉 =
∫
Rn
(f ∗ g) (z)ϕ(z)dz =
∫
Rn
[∫
Rn
g(y)f(z − y)dy]ϕ(z)dz
=
∫
Rn
g(y)
[∫
Rn
f(z − y)ϕ(z)
]dy =
∫
Rn
g(y)
[∫
Rn
f(x)ϕ(x+ y)dx
]dy
o
〈f ∗ g, ϕ〉 =
∫f(x)g(y)ϕ(x+ y)dxdy = 〈f(x)⊗ g(y), ϕ(x+ y)〉 , ϕ ∈ D (4.40)
La ecuacion (4.39) nos lleva a una propiedad de la ecuacion que sera usada para definirla convolucion de dos distribuciones. Esto es, la convolucion de dos distribuciones F1 yF2 en D′ es
〈F1 ∗ F2, ϕ〉 = 〈F1 ⊗ F2, ϕ(x+ y)〉 (4.41)
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 75
Tenemos un pequeno problema; la funcion ϕ(x, y) no tiene soporte compacto; susoporte es la franja entre x+y = A y x+y = −A, donde A es una constante que dependede los soportes de F1 y F2. Para poder ajustar este detalle, tenemos que hacer ciertassuposiciones.
Sabemos que sop (F1⊗F2) = sopF1× sopF2. Segun (4.41), tendra sentido si la inter-seccion de sop (F1 ⊗ F2) y sopϕ(x+ y) es acotado. Claramente, en este caso, cambiandoϕ(x+ y) por una funcion finita ϕ(x+ y) que es igual a ϕ(x+ y) en esta interseccion y seanula fuera de ella. En lo que sigue, denotaremos a dicha funcion por ϕ(x+ y).
El acotamiento de la interseccion del sop (F1⊗F2) y sopϕ(x+ y) puede obtenerse delas dos maneras siguientes:
1. El soporte de una distribucion es acotado.
Sea por ejemplo, el sopF2 acotado. En este caso el sopϕ(x+ y) esta en una franjahorizontal de longitud finita x, y : |x+ y| 6 A, |y| 6 R.Ası, por virtud de la definicion de producto directo, tenemos
〈(F1 ∗ F2) , ϕ〉 = 〈(F1 ⊗ F2) , ϕ(x+ y)〉 = 〈F1(x), 〈F2(y), ϕ(x+ y)〉〉 . (4.42)
Por otro lado, si el soporte de F1 es acotado, entonces el sopϕ(x+y) esta contenidoen una franja vertical de longitud finita. Bajo estas circunstancias, la funcion ψ(x) =〈F2(y), ϕ(x+ y)〉 es un miembro de Dm.
2. sopF1 y sopF2 son acotados en el mismo lugar. Por ejemplo, sea F1 = 0 parax > R1 y sea F2 = 0 para y > R2. En este caso el sopϕ(x + y) esta contenido enuna cuarta parte del plano bajo alguna linea horizontal y a la izquierda de algunalinea vertical. Por lo tanto, el lado derecho de (4.41) esta nuevamente bien definido.
Propiedades de la Convolucion de Distribuciones
1. ConmutatividadF1 ∗ F2 = F2 ∗ F1 (4.43)
Esta propiedad es consecuencia inmediata de la definicion (4.42) y la conmutatividadde los productos directos F1 ⊗ F2.
2. Asociatividad(F1 ∗ F2) ∗ F3 = F1 ∗ (F2 ∗ F3) (4.44)
si el soporte de dos de las tres distribuciones son acotados o si los soportes de lastres son acotados en el mismo lugar.
La prueba de este resultado es una extension de la prueba dada para la validez dela definicion (4.42).
Tesis de Maestrıa

76 4.3. La Convolucion
3. Diferenciacion Si la convolucion F1∗F2 existe, entonces las convoluciones (DαF1)∗F2 y F1 ∗ (DαF2) existen y
(DαF1) ∗ F2 = Dα(F1 ∗ F2) = F1 ∗ (DαF2). (4.45)
Si L es un operador diferencial con coeficientes constantes, de (4.45) tenemos que
(LF1) ∗ F2 = L(F1 ∗ F2) = F1 ∗ (LF2) (4.46)
Estos resultados implican que, para diferenciar una convolucion, es suficiente dife-renciar cada uno de los factores.
4. Continuidad En ciertos casos la convolucion es un operador continuo. Este resul-tado se establece en el siguiente teorema.
Teorema 4.7. Si la sucesion de distribuciones Fl → F, cuando l → ∞, entoncesFl ∗ F2 → F ∗ F2 bajo cada una de las siguientes condiciones:
1. Todas las distribuciones Fl estan concentradas en el mismo conjunto acotado.
2. La distribucion F2 esta concentrada en un conjunto acotado.
3. Los soportes de las distribuciones F y F2 estan acotadas en el mismo lugar por unaconstante independiente de l.
Demostracion: Por (4.42) tenemos,
〈Fl ∗ F2, ϕ〉 = 〈Fl, 〈F2, ϕ(x+ y)〉〉 , ϕ ∈ D (4.47)
Si la condicion 1 es valida, podemos reemplazar 〈F2, ϕ(x+ y)〉 por una funcion deprueba ψ(x) que se anula fuera de la region en la cual las Fl estan concentradas. Entonces
〈Fl ∗ F2, ϕ〉 = 〈Fl ⊗ F2, ϕ(x+ y)〉 = 〈Fl, 〈F2, ϕ(x+ y)〉〉= 〈Fl, ψ(x)〉 → 〈F, ψ(x)〉 = 〈F, 〈F2, ϕ(x+ y)〉〉= 〈F ⊗ F2, ϕ(x+ y)〉 = 〈F ∗ F2, ϕ〉 (4.48)
Ası, Fl ∗ F2 → F ∗ F2 cuando l→∞.
En el segundo caso, ψ(x) = 〈F2, ϕ(x+ y)〉 es una funcion de prueba e igual que antesobtenemos el resultado deseado.
Por ultimo, en el caso 3 supongamos que el soporte de las distribuciones F y F2 seencuentran acotados por la izquierda y que el soporte de ψ(x) = 〈F2, ϕ(x+ y)〉 es acotadopor la derecha. Entonces procedemos como antes.
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 77
4.3.1 Convolucion de Distribuciones Temperadas
El analisis previamente desarrollado puede extenderse para distribuciones de lento creci-miento. Tenemos la misma definicion (4.41) para la convolucion de dos distribucionesde lento crecimiento. Las restricciones son similares. Para establecer varias propiedadeshacemos uso del producto directo de distribuciones temperadas.
4.3.2 La Transformada de Fourier de Convoluciones
Sean f y g dos funciones localmente integrables. Entonces la Transformada de Fourier dela convolucion f ∗ g es
[f ∗ g] (ξ) =
∫ ∞
−∞f ∗ geiξxdx
=
∫ ∞
−∞eiξx
∫ ∞
−∞f(x− y)g(y)dy
=
∫ ∞
−∞g(y)eiξydy
∫ ∞
−∞f(x− y)eiξ(x−y)d(x− y)
= g(ξ)f(ξ) = f(ξ)g(ξ).
Ası, la transformada de Fourier de f ∗g es el producto de sus transformadas de Fourier.Un resultado similar es valido para la transformada de Fourier Inversa.
Ejemplos
Ejemplo 4.12. a) Podemos expresar la integral
f(x) =
∫ x
−∞ϕ(y)dy, ϕ ∈ S
como una convolucion. Eligiendo, y = x− z, encontramos que
f(x) =
∫ x
−∞ϕ(y)dy = −
∫ ∞
0
ϕ(x− z)dz =
∫ ∞
−∞H(z)ϕ(x− z)dz = H ∗ ϕ.
b) Sea F una distribucion arbitraria. La convolucion de δ(x) y F (x) es
〈δ ∗ F, ϕ〉 = 〈δ(z), ϕ(x+ z)〉 = 〈F (x), ϕ(x)〉 , ϕ ∈ D.o
δ ∗ F = F.
Ası, la funcion delta es un elemento identidad enD′ para la operacion de convolucion.
Tesis de Maestrıa

78 4.3. La Convolucion
Ejemplo 4.13. Uno de los usos mas importantes de la teorıa de convolucion es obteneruna solucion particular de una ecuacion diferencial.
Lu = f (4.49)
donde Lu = L(D)u, es un operador diferencial lineal. Esto se encuentra haciendo uso dela solucion fundamental E, la cual esta dada de la siguiente manera: Una distribucion Ese dice una solucion fundamental para el operador diferencial L si
LE = δ. (4.50)
Claramente nuestra solucion para u es de la forma
u = f ∗ E (4.51)
Esto se sigue al aplicar el operador L a ambos lados de (4.51):
Lu = L(f ∗ E) = f ∗ LE = f ∗ δ = f.
Ejemplo 4.14. En muchos problemas fısicos la convolucion es natural. Demostraremosesto considerando el problema de valores iniciales.
∂2u
∂t2− ∂2u
∂x2= 0, (4.52)
u(x, 0) = ϕ(x),∂u
∂t(x, 0) = ψ(x). (4.53)
Este es un problema famoso del movimiento de una partıcula el cual nos da el desplaza-miento inicial ϕ(x) y velocidad inicial ψ(x).
La solucion general de (4.52) es
u(x, t) = f(x+ t) + g(x− t), (4.54)
la cual podemos verificar por sustitucion directa.
De (4.53) tenemos que
u(x, 0) = f(x) + g(x) = ϕ(x) (4.55)
y∂u
∂t(x, 0) = f ′(x)− g′(x) = ψ(x) (4.56)
Integrando (4.56) con respecto a x tenemos
f(x)− g(x) =
∫ x
a
ψ(s)ds, (4.57)
Jessica Yuniver Santana Bejarano

4. Propiedades Adicionales de Distribuciones. 79
donde la constante de integracion se incorpora bajo el lımite, (4.55) y (4.57) nos permitenresolver para f(x) y g(x), entonces
f(x) =1
2ϕ(x) +
1
2
∫ x
a
ψ(s)ds y g(x) =1
2ϕ(x)− 1
2
∫ x
a
ψ(s)ds
Sustituyendo estas expresiones en (4.54), obtenemos
u(x, t) =1
2ϕ(x+ t) +
1
2
∫ x+t
a
ψ(s)ds−[1
2
∫ x−t
a
ψ(s)ds− 1
2ϕ(x− t)
]
=1
2[ϕ(x+ t)− ϕ(x− t)] +
1
2
∫ x+t
x−t
ψ(s)ds (4.58)
la cual es la formula de D’Alambert.
Interpretemos esta formula desde el punto de vista de la presente teorıa. Para esteproposito, tenemos el caso especial ϕ(x) = 0. Entonces (4.58) es
u(x, t) =1
2
∫ x+t
x−t
ψ(s)ds (4.59)
Podemos expresarla como una distribucion con ayuda de la funcion generalizadaE(x, t) definida como
E(x, t) =
12
si |x| < t0 si |x| > t
,
=1
2H(t+ x)H(t− x) =
1
2H(t− |x|) (4.60)
entonces (4.59) toma la forma
u(x, t) =
∫ ∞
−∞E(x− s, t)ψ(s)ds = E ∗ ψ (4.61)
Como un segundo caso especial, elegimos ψ(x) = 0. Entonces (4.58) es
u(x, t) =1
2[ϕ(x+ t)− ϕ(x− t)]
=1
2
∫ ∞
−∞[δ(t+ x− s) + δ(x− t+ s)]ϕ(s)ds. (4.62)
Ahora, de (4.60) se sigue que
∂E(x− s, t)∂t
=1
2[δ(t+ x− s)H(t− x+ s) + δ(t− x+ s)H(t+ x− s)] ,
Tesis de Maestrıa

80 4.3. La Convolucion
para t > 0, es∂E(x− s, t)
∂t=
1
2[δ(t+ x− s) + δ(t− x+ s)] . (4.63)
Combinando (4.62) y (4.63):
u(x, t) =
∫ ∞
−∞
∂E(x− s, t)∂t
ϕ(s)ds =∂
∂t
∫ ∞
−∞E(x− s, t)ϕ(s)ds =
∂
∂t(E ∗ ϕ), t > 0.
(4.64)llamada la regla de Stokes. La formula general se sigue sumando (4.61) y (4.64)
u(x, t) = E ∗ ψ = E ∗ ψ +∂
∂t(E ∗ ϕ) (4.65)
Ejemplo 4.15. Ahora estudiemos el problema con valores iniciales para la ecuacion decalor,
∂u(x, t)
∂t− k∂
2u(x, t)
∂x2= 0, u(x, 0) = f(x). (4.66)
para t > 0, donde f(x) es una funcion generalizada y k es una constante positiva.
Tomando la transformada de Fourier de ambas partes de la ecuacion (4.66) tenemos:
dU(u, t)
dt− ku2U(u, t) = 0, U(u, 0) = F (u)
donde U = u y F = f .
Su solucion esU(u, t) = e−ku2tF (u). (4.67)
Para invertir la ecuacion (4.67) debemos encontrar la funcion v(x, t) cuya transfor-mada de Fourier es valida en la region t > 0 y que satisface la ecuacion diferencial (4.66).Tal relacion la obtenemos de los Ejemplos 4.5 y 4.6 la cual es:
v(x, t) =
δ(s) si t = 0
e−ku2t√kt
si t > 0.
Finalmente, usando la formula para transformada de Fourier de convoluciones obtenemosla solucion de (4.66) como:
u(x, t) = v(x, t)× f(x) =1√kt
∫ ∞
−∞f(s)e−(x−s)2ds.
Con este capıtulo, terminamos lo referente a la teorıa de Distribuciones, obteniendouna teorıa muy rica la cual aplicaremos en el siguiente capıtulo a Ecuaciones DiferencialesParciales.
Jessica Yuniver Santana Bejarano

5Capıtulo
Interaccion Kink-Antikink
Para Ecuaciones de Onda
Semilineales con un Parametro
Pequeno.En este capıtulo presentamos una aplicacion interesante de la teorıa de distribuciones
a las ecuaciones diferenciales parciales, para lo cual hacemos uso de los resultados descritosen los capıtulos anteriores y del metodo asintotico debil. Las soluciones del problema quedescribiremos a continuacion son suaves para ε > 0 pero en el paso al lımite cuando ε→ 0se vuelven no suaves, razon por la cual debemos definir el concepto de solucion debil.
Consideremos una clase de ecuaciones de onda semi-lineales con un parametro pequenoy no linealidades tales que las ecuaciones tengan soluciones exactas del tipo kink. Elobjetivo principal consiste en obtener condiciones suficientes para el termino no linealbajo las cuales la colision kink-antikink ocurre sin cambios en la forma de las ondas y conunicamente algunos cambios de las trayectorias de ondas solitarias.
5.1 Nociones Basicas
Consideremos una clase de ecuaciones de onda semi-lineales con un parametro ε
ε2(utt − uxx) + F ′(u) = 0 (5.1)
En este trabajo supondremos que la funcion no lineal F (u) es par y es tal que lasecuaciones (5.1) tienen soluciones exactas auto-similares de las llamadas de tipo “kink”(tambien llamados “fluxones”):
u(x, t, ε) = ω
(Sβ
x− V tε
), S = ±1, β = (1− V 2)−
12 , |V | < 1, (5.2)
ω ∈ C∞(R), ω(η)→ 0 para η → −∞, ω(η)→ 1 para η →∞,
donde ω es la solucion autosimilar para (5.1). La grafica de una funcion ω tıpica semuestra en la figura 5.1.
81

82 5.1. Nociones Basicas
1
Figura 5.1: Una funcion ω tıpica
Mas en detalle, la funcion (5.2) es llamada “kink” si S = 1 y “antikink” si S = −1,como se muestran en la figura 5.2.
←Frente del kink•x1
V1 < 0Frente del Antikink→ •
V2 > 0
x2
(a) (b)
Figura 5.2: (a) Antikink; (b) Kink.Los correspondientes frentes son xi, i = 1, 2.
En (5.2) t es el tiempo, V es la velocidad, β es el controlador de la velocidad, ε es unparametro pequeno y x− V t es la trayectoria que sigue el frente del kink o del antikink.
Sustituyendo (5.2) en (5.1) obtenemos
F ′(ω(η)) = ω00(η)def=
d2
dη2ω(η). (5.3)
Si la funcion F satisface las condiciones
A) F (z) ∈ C∞(R), F (z) > 0 para z ∈ (0, 1),
B) F (i)(z0) = 0, i = 0, 1, F′′(z0) > 0, donde z0 = 0 o z0 = 1,
existe una solucion u(x, t, ε) en la forma (5.2) y tiende a los valores lımites (1 si η → +∞,0 si η → −∞,) suficientemente rapido. De hecho, la condicion F
′′(z0) > 0 en z0 = 0 o 1
es equivalente a requerir que la concavidad de la funcion ω(η) se anule mas rapidamenteque ω0(η) en ±∞.
Bajo la hipotesis adicional
C) F
(1
2+ z
)= F
(1
2− z)
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 83
la funcion ω(η)− 12
sera impar y ω(η) + ω(−η) = 1.
Para considerar la superposicion de las ondas ω
(±βi(x− Vit− x0
i )
ε
)con distancias
grandes entre sus frentes x = Vit+x0i como dos kinks o antikinks no-interactuantes (para
t≪ 1) imponemos la condicion de periodicidad:
D) F (z + 1) = F (z).
Ejemplos de funciones que satisfacen tales condiciones son las siguientes:
F (z) =1− cos(2πz)
4π2, y F (z) = sin4(πz), (5.4)
Resolviendo la ecuacion (5.3) para estas funciones encontramos que las correspondientesfunciones ω(η) son
ω =2
πarctan(exp(η)) y ω =
1
πarccot(−
√2πη), (5.5)
respectivamente.
Por ejemplo, para el caso F (z) = sin4(πz), resulta que la ecuacion (5.3), que esequivalente a la ecuacion F (ω(η)) = ω2
0/2, es sin4(πω(η)) = ω20/2. Separando variables se
obtiene√
2dη = csc2(πω)dω. Integrando y usando la condicion a la frontera (ω → +1 siη → +∞,) se concluye que ω(η) = arccot(−
√2πη)π.
El primer ejemplo corresponde a la ecuacion de sine-Gordon. Es conocido que loskinks de la ecuacion de sine-Gordon colapsan sin cambiar sus formas y el unico resultadode la interaccion es la aparicion de un cambio de fase. Este resultado se probo inicial-mente usando el metodo llamado Inverse Scattering Transform. Llamaremos a tal tipode interaccion de kinks “escenario de Sine-Gordon”. Recıprocamente, dependiendo de lasvelocidades Vi, la interaccion kink-antikink seguira el escenario de sine-Gordon o resultaraun aparente “breather”, ver la figura 5.3.
−→←−
Figura 5.3: Un “breather” como resultado de la interaccion.
La pregunta natural que nos podemos hacer aquı es la siguiente: ¿Es la ecuacion desine-Gordon la unica de la clase (5.1) para la cual tal escenario es valido? Si no, ¿como
Tesis de Maestrıa

84 5.1. Nociones Basicas
encontramos condiciones en F bajo las cuales los kinks y los antikinks de la ecuacion (5.1)colapsen siguiendo el escenario de sine-Gordon?
No podemos usar metodos tradicionales para describir el escenario de colision de on-das, pues no podemos usar soluciones exactas del problema de Cauchy, ya que la ecuacionde sine-Gordon es la unica representante de la clase (5.1) que puede ser integrada e-xactamente. Por lo tanto, construiremos una solucion asintotica tratando a ε como unparametro pequeno. Sin embargo, las aproximaciones asintoticas tradicionales no puedenresponder la pregunta considerada aquı, ya que hoy en dıa existen problemas no resueltos.
Para evitar estas dificultades, usamos el metodo asintotico debil el cual ha sido desarro-llado por los profesores G. Omel’yanov y V. Danilov (ver [4]). La ventaja principal deesta aproximacion es la posibilidad de reducir el problema de describir la interaccion deondas no lineales a un analisis cualitativo de alguna ecuacion diferencial ordinaria (en vezde EDP). Este metodo toma en cuenta el hecho de que los kinks, los cuales son suavespara ε > 0 se vuelven no-suaves en el lımite cuando ε → 0. Entonces trataremos a lassoluciones de la ecuacion (5.1) como un mapeo C∞(0, T ;C∞(Rx)) para ε > 0 y unicamentecomo C(0, T ;D′(Rx)) uniformemente en ε > 0.
Ahora, para construir una definicion de una solucion asintotica que admita el paso allımite cuando ε→ 0, es natural usar la construccion estandar del espacio D′.
Una distribucion u ∈ D′((0, T ) × Rx) se dice ser una solucion de la ecuacion (5.1) siF ′(u) ∈ D′((0, T )× Rx) y la relacion
∫ T
0
∫ ∞
−∞
(ε2u(ψtt − ψxx) + ψF ′(u)
)dxdt = 0 (5.6)
es valida para cualquier funcion de prueba ψ(x, t) ∈ D((0, T )× Rx).
La relacion 5.6 se obtiene al usar las propiedades de la derivada distribucional en ladefinicion usual de solucion debil:
0 =⟨ε2(utt − uxx) + F ′(u), ψ
⟩=
∫ T
0
∫ ∞
−∞[ε2(utt − uxx) + F ′(u)]ψ(x)dxdt
=
∫ T
0
∫ ∞
−∞ε2u(ψtt − ψxx) + ψF ′(u)dxdt.
Sin embargo, notese que la relacion (5.6) presenta una inconsistencia. De hecho, lahipotesis B) implica que para cualquier funcion suave ϕ = ϕ(t) las siguientes igualdades
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 85
son validas:∫ ∞
−∞ψ(x)F ′
(ω
(βx− ϕε
))dx =
∫ ∞
−∞F ′(ω
(βx− ϕε
))d
dx
∫ x
−∞ψ(x′)dx′dx
= −∫ ∞
−∞ψ1
(ϕ+ η
ε
β
)d
dηF ′ (ω(η))dη
= −ψ(ϕ)ε
β
∫ ∞
−∞ηd
dηF ′(ω(η))dη +O(ε2)
= O(ε2),
donde ψ1(x) =∫ x
−∞ ψ(x′)dx′, ψ(x) ∈ D(Rx).
Esto significa que, en (5.6), el lado izquierdo es O(ε2) mientras que el lado derecho es0.
La idea principal es usar funciones de prueba especiales, digamos, aquellas que sonrapidamente variantes donde la solucion varıa rapidamente.
Para la ecuacion (5.1) significa la eleccion de las funciones de prueba u′xψ, ψ ∈ D(R),donde u′x es una funcion que varıa rapidamente en x. Transformaciones estandar para ladefinicion debil para tales funciones nos lleva al siguiente resultado:
Definicion 5.1. Una funcion u(t, x, ε), perteneciente a C∞(0, T ;C∞(Rx)) para ε > 0 yperteneciente a C(0, T ;D′(Rx)) uniformemente en ε, es llamada una solucion asintoticadebil mod OD′(ε2) de la relacion (5.1) si la relacion
2d
dt
∫ ∞
−∞ε2utuxψdx+
∫ ∞
−∞
(εut)
2 + (εux)2 − 2F (u)
ψxdx = O(ε2) (5.7)
se satisface para cualquier funcion de prueba ψ = ψ(x) ∈ D(R).
El lado izquierdo es una funcion C∞ para ε > 0 y una funcion uniformemente continuaa pedazos en ε > 0. La estimacion se entiende en el sentido C(0, T ):
g(t, ε) = O(εk)←→ maxt∈[0,T ]
|g(t, ε)| 6 Cεk. (5.8)
Notemos que en contraste con la igualdad (5.6), la definicion 5.1 involucra en eltermino principal las derivadas de u con argumentos x
εy t
ε. Mas aun, se requiere la
relacion β2 =1
1− v2para la solucion de ondas solitaria (5.2). El lado izquierdo de (5.7)
es el resultado de la multiplicacion de la ecuacion (5.1) por ψ(x)ux e integracion por partesen caso de u suave, por lo tanto, es cero para cualquier solucion kink exacta. Por otrolado, la relacion (5.7) es la condicion de ortogonalidad que aparece para fases asintoticassimples. Esta condicion garantiza la existencia de la primera correccion y nos ayuda aencontrar una ecuacion para el movimiento distorsionado de frentes de kinks.
En lo que sigue usaremos la notacion OD′(εk) para la pequenez en el sentido debil:
Tesis de Maestrıa

86 5.1. Nociones Basicas
Definicion 5.2. Denotamos por v(t, x, ε) = OD′(εk) a la funcion v(t, x, ε) la cual perte-nece a C∞(0, T ;C∞(Rx)) para ε > 0 y pertenece a C(0, T ;D′(Rx)) uniformemente en εtal que la relacion ∫ ∞
−∞v(t, x, ε)ψ(x)dx = O(εk),
es valida para cualquier funcion de prueba ψ ∈ D(Rx). Aquı la estimacion del lado derechoes tratada de la misma manera que en la definicion 5.1.
Integrando por partes la segunda integral en el lado izquierdo de (5.7) se obtiene larelacion:
2∂
∂tε2utux −
∂
∂x
(εut)
2 + (εux)2 − 2F (u)
= OD′(ε2). (5.9)
5.1.1 Interaccion de dos kinks
El caso de interaccion de dos kinks fue estudiado en el artıculo [17]. Mas en detalle, laecuacion (5.1) esta complementada por las condiciones iniciales
u|t=0 =2∑
i=1
ω
(βix− x0
i
ε
), ε
∂u
∂t
∣∣∣t=0
= −2∑
i=1
βiViω0
(βix− x0
i
ε
), (5.10)
donde βi =1√
1− V 2i
, |Vi| ∈ (0, 1), y las posiciones iniciales de los frentes x0i son tales que
x01− x0
2 > 1. Suponemos que las trayectorias x = Vit+ x0i tienen un punto de interseccion
x = x∗ en el instante de tiempo t = t∗.
En [17] se probo la siguiente conclusion:
Teorema 5.1. Supongamos que A-D son validas. Mas aun, sean la funcion F y losnumeros βi, i = 1, 2, tales que la siguiente desigualdad se cumple∫ ∞
−∞F (ω(η) + ω(θη))dη 6
∫ ∞
−∞
F (ω(η)) + F (ω(θη)) + 2β2
2
√F (ω(η))F (ω(θη))
dη,
(5.11)
donde θ =β1
β2
. Entonces la interaccion de kinks en el problema (5.1), (5.10) preserva el
escenario de sine-Gordon con exactitud mod OD′(ε2) en el sentido de la definicion 5.1
Simulaciones numericas nos muestran que este teorema es valido para los ejemplosmostrados en las ecuaciones (5.4), (5.5).
Observacion 5.1. La hipotesis C) no es esencial. La elegimos ya que la propiedad desimetrıa de ω(η) nos ayuda a simplificar detalles tecnicos en la prueba de los teoremas. La
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 87
hipotesis D) se puede cambiar por una mas debil: F (z) para z ∈ (1, 2) tiene las mismaspropiedades que para z ∈ (0, 1). Sin embargo, la periodicidad de F tambien implicasimplificaciones de la prueba. Hacemos hincapie en que todas las hipotesis nos facilitanverificar los teoremas, al menos numericamente, ya que para cualquier F fija la funcionω puede encontrarse facilmente como la solucion del problema de Cauchy
dω
dη=√
2F (ω), ω → 0, η → −∞. (5.12)
5.2 Interaccion Kink-Antikink
Nuestro objetivo aquı es la consideracion de la colision kink-antikink,
u|t=0 =2∑
i=1
ω
(Siβi
x− x0i
ε
), ε
∂u
∂t
∣∣∣t=0
=2∑
i=1
SiβiViω0
(Siβi
x− x0i
ε
), (5.13)
donde S1 = 1, S2 = −1, x01 − x0
2 > 1 y usamos la misma notacion que en (5.10).
(5.13) es valida ya que, para el caso t = 0 se sigue que
u = ω
(β1x− x0
1
ε
)+ ω
(−β2
x− x02
ε
)
donde x0i = x− Vit. Ası
ε∂u
∂t= β1V1ω0
(β1x− x0
1
ε
)− β2V2ω0
(β2x− x0
2
ε
).
Para una representacion geometrica en el tiempo de interaccion de las ondas de choque,ver la figura 5.4
•
ϕ10(t) ϕ20(t)
x02 x0
1
t∗
x∗
Figura 5.4: Evolucion de los frentes no perturbados ϕi0(t)
El resultado principal consiste en obtener condiciones suficientes para el termino nolineal bajo las cuales la interaccion kink-antikink ocurre sin cambiar las formas de las on-das. Es muy importante que la condicion principal, la cual aparece en vez de (5.11), sea
Tesis de Maestrıa

88 5.3. Construccion de la Solucion asintotica
verificada numericamente para cualquier no-linealidad especifica y para cualesquiera ve-locidades Vi de las ondas no interactivas. Sin embargo, tienen una forma muy complicaday no podemos simplificarlas en alguna manera razonable. Por lo tanto, presentaremos elteorema principal al final de este capıtulo. Aquı solo notaremos que, aparentemente, noexisten no-linealidades tales que esta condicion se cumpla para todas las posibles veloci-dades Vi de ondas solitarias.
Describamos el contenido del presente capıtulo. En la seccion 5.3 presentamos eltermino principal de la solucion asintotica debil para el problema (5.1), (5.13). Despuesde algunos calculos tecnicos obtenemos un sistema de ecuaciones diferenciales ordinariaspara los parametros de las asintoticas. Luego, pasamos a un sistema dinamico 2× 2 parafunciones auxiliares W y σ con una singularidad en la recta σ = 0. La existencia de lasolucion asintotica requerida es equivalente a la existencia de una trayectoria γs tal que:
1. Pase del semi-plano izquierdo al derecho,
2. Su coordenada W tienda a cero cuando σ → ±∞.
La investigacion del sistema dinamico, en la seccion 5.4, muestra que la primera pro-piedad puede ser realizada unicamente bajo algunas hipotesis especıficas. De hecho, estaes la condicion adicional requerida en A)-D) . Al mismo tiempo la segunda propiedadfalla. Por otro lado el termino principal de la solucion asintotica no tiene algun parametrolibre adicional para cambiar γs. Por esta razon en la seccion 5.6 suplementamos el terminoprincipal de la solucion asintotica por algunas correcciones pequenas las cuales se localizancerca del origen ω = 0, σ = 0. El objetivo de esta transformacion es rotar las trayectoriaspreservando las propiedades principales del retrato fase y obteniendo la trayectoria γs conlas propiedades requeridas. La prueba de la existencia de tales correcciones completa laconstruccion de la solucion asintotica. El resultado principal, Teorema 5.2, se formulo alfinal de la seccion 5.6. Presentamos tambien el Teorema 5.3 el cual muestra que las condi-ciones requeridas para la no-linealidad pueden obtenerse directamente de dos pequenosequilibrios en la ecuacion (5.1). En la seccion 5.5 presentamos algunas consideracionesgraficas, de los resultados obtenidos para el primer ejemplo que presentamos en la ecuacion5.4, correspondiente a la ecuacion de sine-Gordon.
5.3 Construccion de la Solucion asintotica
Escribamos el termino principal de la solucion asintotica debil mod OD′(ε2) del problema(5.1), (5.13) mediante el anzatz
u =2∑
i=1
ω
(Siβi
x− Φi(t, τ, ε)
ε
), (5.14)
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 89
que representa la suma de dos ondas solitarias, donde
Φi(t, τ) = ϕi0(t) + εϕi1(τ). (5.15)
Las funciones ϕi1(τ) son correcciones de las fases ϕi0(t) por un parametro ε (los frentesdel kink y del antikink son ϕi0 = Vit + x0
i , para i = 1, 2, respectivamente). Utilizaremos
un tiempo rapido definido por τ =ψ0(t)
εdonde ψ0(t) = ϕ20(t)−ϕ10(t). Supondremos que
las funciones ϕi1 = ϕi1(τ) son suaves y que
ϕi1 → 0, cuando τ → −∞ ϕi1 → ϕ∞i1 ≡ ctei cuando τ →∞ (5.16)
con una rapidez no menor que1
|τ | . Las constantes βi, Vi y Si son las mismas que en (5.13).
τ
Figura 5.5: Funciones ϕi1(t)
Nos interesa saber que es lo que pasa justo en el momento de la interaccion.
Consideremos brevemente el anzatz en la ecuacion (5.14). Como x01 > x0
2, la diferenciaϕ20(t)− ϕ10(t) resulta negativa durante algun t < t∗. Ası, para este intervalo de tiempo,
el “tiempo rapido” τ =ϕ20(t)− ϕ10(t)
ε→ −∞ cuando ε → 0. Por lo tanto, la primera
hipotesis en (5.16) implica que la funcion (5.14) describe el movimiento de dos ondassolitarias no interactuantes. Despues de la interaccion, ϕ20(t) − ϕ10(t) > 0 y entoncesτ → ∞ cuando ε → 0. En el caso en el cual la segunda hipotesis de (5.16) se cumple,la colision kink-antikink ocurre sin cambiar la forma de las ondas. Por el contrario, silas funciones ϕi1 son no acotadas cuando τ → ∞, entonces los corrimientos de las fasesno se estabilizarıa, sino que variarıan con el tiempo. Finalmente, la no existencia deϕi1 para algun τ > 0 significa que las ondas viajeras pierden la forma de kink durantela interaccion. Supondremos que las funciones ϕi1 existen y satisfacen las propiedades(5.16).
Pasemos a la construccion de la solucion asintotica debil. Obviamente, para esteobjetivo debemos calcular asintoticas debiles con discrepancia OD′(ε2) para las expre-siones (εux)
2, (εut)2 y las otras que aparecen en el lado izquierdo de la relacion (5.7).
Clarificaremos las tecnicas usadas para cada uno de los terminos.
Tesis de Maestrıa

90 5.3. Construccion de la Solucion asintotica
Antes de ello, definamos ω0(η) =dω(η)
dηdonde ω es como la definimos anteriormente
en (5.7). La hipotesis C) implica que ω(η)− 12
es impar, de aquı que ω0 sea una funcionpar pues
ω0 =dω
dη=
d
dη
(ω(η)− 1
2
).
En la figura 5.6 se muestran las funciones ω(η) y ω(η)− 12.
τ
ω(η)
ω(η)− 12
Figura 5.6: Funciones ω(η), ω(η)− 12
Ahora si estamos listos para aclarar las tecnicas usadas para llegar a cada uno de losterminos que aparecen en el lado izquierdo de (5.7):
Primeramente, realicemos los calculos necesarios para el termino (εux)2:
Diferenciando el anzatz (5.14) con respecto a x tenemos:
ux =2∑
i=1
ω0
(Siβi
x− Φi(t, τ, ε)
ε
)Siβi
ε, (5.17)
ya que las funciones Φi no dependen de x; luego,
εux =2∑
i=1
Siβiω0
(Siβi
x− Φi(t, τ, ε)
ε
)
= β1ω0
(β1x− Φ1(t, τ, ε)
ε
)− β2ω0
(β2x− Φ2(t, τ, ε)
ε
)(5.18)
Ahora,
(εux)2 = β2
1ω20
(β1x− Φ1(t, τ, ε)
ε
)+ β2
2ω20
(β2x− Φ2(t, τ, ε)
ε
)
− 2β1β2ω0
(β1x− Φ1(t, τ, ε)
ε
)ω0
(β2x− Φ2(t, τ, ε)
ε
)
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 91
Integrando tenemos,∫ ∞
−∞(εux)
2ψ(x)dx =
∫ ∞
−∞
β2
1ω20
(β1x− Φ1(t, τ, ε)
ε
)ψ(x)dx (5.19)
+
∫ ∞
−∞
β2
2ω20
(β2x− Φ2(t, τ, ε)
ε
)ψ(x)dx
−∫ ∞
−∞2β1β2ω0
(β1x− Φ1(t, τ, ε)
ε
)×
ω0
(β2x− Φ2(t, τ, ε)
ε
)ψ(x)dx
donde ψ(x) ∈ D(R) es una funcion arbitraria.
Analicemos el primer termino de la derecha:∫ ∞
−∞
β2
1ω20
(β1x− Φ1(t, τ, ε)
ε
)ψ(x)dx,
haciendo el cambio de variables ξ = x−Φ1
εse sigue que
∫ ∞
−∞β2
1ω20
(β1x− Φ1(t, τ, ε)
ε
)ψ(x)dx = εβ2
1
∫ ∞
−∞ω2
0(β1ξ)ψ(Φ1 + εξ)dξ. (5.20)
Aplicando la Formula de Taylor de primer orden:
ψ(Φi + εξ) = ψ(Φi) + εξψ′(ξ∗),
donde ξ∗ es un punto intermedio. Entonces de la ecuacion (5.20) obtenemos la relacion:
εβ21
∫ ∞
−∞ω2
0(β1ξ)ψ(Φ1 + εξ)dξ = εβ21
∫ ∞
−∞ω2
0(β1ξ)[ψ(Φ1) + εξψ′(Φ1) +O(ε2)
]dξ
= εβ21ψ(Φ1)
∫ ∞
−∞ω2
0(β1ξ)dξ
+ εβ21ψ
′(Φ1)
∫ ∞
−∞ξω2
0(β1ξ)dξ +O(ε2)
= εβ21ψ(Φ1)
∫ ∞
−∞ω2
0(β1ξ)dξ +O(ε2),
para lo cual hicimos uso de que las funciones ω0(ξ) y ξ son par e impar, respectivamente,y que Φ1 no depende de x.
Como el segundo termino de la derecha en la ecuacion (5.19) es similar tenemos:
β2i
∫ ∞
−∞ω2
0
(βix− Φi(t, τ, ε)
ε
)ψ(x)dx = εβ2
i ψ(Φi)
∫ ∞
−∞ω2
0(βiξ)dξ +O(ε2),
Tesis de Maestrıa

92 5.3. Construccion de la Solucion asintotica
para i = 1, 2.
Ahora, el tercer termino en (5.19):
∫ ∞
−∞ω0
(β1x− Φ1(t, τ, ε)
ε
)ω0
(β2x− Φ2(t, τ, ε)
ε
)ψ(x)dx,
donde por el momento no usaremos el factor −2β1β2.
Hacemos el cambio de variables siguiente:
ξ =x− Φ2
ε, entonces
x− Φ1
ε=
Φ2 − Φ1
ε+ ξ = σ + ξ,
donde σ esta dada por
σ =Φ2 − Φ1
ε= τ + ϕ21(τ)− ϕ11(τ). (5.21)
Ası, el tercer termino es:
= ε
∫ ∞
−∞ω0 (β1(σ + ξ))ω0 (β2ξ)ψ(Φ2 + εξ)dξ
= εψ(Φ2)
∫ ∞
−∞ω0 (β1(σ + ξ))ω0 (β2ξ)dξ +O(ε2),
donde nuevamente hicimos uso de la formula de Taylor de primer orden. Multiplicandopor −2β1β2, tenemos que el tercer termino toma la siguiente forma:
−2β1β2εψ(Φ2)
∫ ∞
−∞ω0(β1σ + β1ξ)ω0(β2ξ) +O(ε2).
De aquı, se sigue la relacion:
∫ ∞
−∞(εux)
2ψ(x)dx = ε2∑
i=1
β2i ψ(Φi)
∫ ∞
−∞ω2
0(βiξ)dξ (5.22)
− 2β1β2εψ(Φ2)
∫ ∞
−∞ω0(β1σ + β1ξ)ω0(β2ξ) +O(ε2),
la cual es correcta para cualquier funcion de prueba.
Si hacemos η = βiξ en la primera integral y β2ξ = η en la segunda integral en el ladoderecho de (5.22) obtenemos
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 93
∫ ∞
−∞(εux)
2ψ(x)dx = ε2∑
i=1
β2i
βi
ψ(Φi)
∫ ∞
−∞ω2
0(η)dη
− 2εβ1ψ(Φ2)
∫ ∞
−∞ω0(η)ω0(θη + β1σ)dη +O(ε2)
= εa2
2∑
i=1
βiψ(Φi)− 2εβ1ψ(Φ2)a2λ1(σ) +O(ε2),
donde hemos usado la notacion
a2 =
∫ ∞
−∞ω2
0(η)dη, λ1(σ) =1
a2
∫ ∞
−∞ω0(η)ω0(θη + β1σ)dη, θ =
β1
β2
. (5.23)
Ası
∫ ∞
−∞(εux)
2ψ(x)dx = εa2
2∑
i=1
βiψ(Φi)− 2β1ψ(Φ2)λ1(σ)
+O(ε2). (5.24)
Entonces, (5.24) en el sentido de distribuciones es:
(εux)2 = εa2
2∑
i=1
βiδ(x− Φi)− 2β1λ1(σ)δ(x− Φ2)
+OD′(ε2). (5.25)
Mas aun, existe una manera de simplificar (5.25). Sabemos que las correcciones delos frentes de propagacion del kink y el antikink estan dadas por la ecuacion (5.15) de talmanera que el retrato fase de estas propagaciones estan dadas por la figura 5.4. Buscamosdeterminar la interaccion en (x∗, t∗), ası x∗ = Vit
∗ + x0i lo cual implica que x0
i = x∗−Vit∗.
De aquı que en este punto las trayectorias sean Φi = Vit+ x∗− Vit∗ + εϕi1(τ) esto es,
Φi = x∗ + Vi(t− t∗) + εϕi1(τ).
Por (5.21) tenemos:
σ =Φ2 − Φ1
ε=
1
ε[(t− t∗) [V2 − V1] + ε [ϕ21(τ)− ϕ11(τ)]]
=ν
ε(t− t∗) + (ϕ21 − ϕ11)
donde ν := V2 − V1. Entonces,
t− t∗ =ε
ν[σ + ϕ11 − ϕ21].
Tesis de Maestrıa

94 5.3. Construccion de la Solucion asintotica
De aquı que
Φi = x∗ + Viε
ν[σ + ϕ11 − ϕ21] + εϕi1(τ)
= x∗ + ε
Vi
ν[σ + ϕ11 − ϕ21] + ϕi1(τ)
= x∗ + ε bi[σ + ϕ11 − ϕ21] + ϕi1(τ)= x∗ + ε biσ + biϕ11 − biϕ21 + ϕi1(τ)
con bi = Vi
νy b2 − b1 = 1.
Ası,Φi = x∗ + εχi, i = 1, 2,
dondeχi = biσ + biϕ11 − biϕ21 + ϕi1 (5.26)
Mostremos queχi = biσ + b2ϕ11 − b1ϕ21. (5.27)
usando la igualdad b2 − b1 = 1.
En efecto, para el caso i = 1 se tiene:
b1σ + b1ϕ11 − b1ϕ21 + ϕ11 = b1σ + ϕ11(b1 + 1)− b1ϕ21
= b1σ + b2ϕ11 − b1ϕ21.
Para el caso i = 2 se tiene:
b2σ + b2ϕ11 − b2ϕ21 + ϕ21 = b2σ + b2ϕ11 + ϕ21(1− b2)= b2σ + b2ϕ11 − b1ϕ21.
Ası, (5.27) queda probada.
Notese, ademas, que |σλ1(σ)| 6 cte. De hecho, geometricamente podemos ver estaafirmacion en la figura 5.7. Ya que β1σ mueve a la grafica de ω0(η) hacia la izquierda ohacia la derecha dependiendo del signo y θ hace que la grafica sea mas estrecha o masancha, entonces ω0(η)ω0(θη+βσ) tendera a cero cuando |σ| → ∞. Ası, λ1(σ)→ 0 cuando|σ| → ∞. Entonces λ1 es una funcion de Schwartz.
Ahora, usaremos el siguiente resultado (ver [11]):
Lema 5.1. Sea S(τ) una funcion del espacio de Schwartz y sea ϕk(τ) ∈ C∞ con lasiguiente representacion:
ϕk(τ) = x∗ + εχk(τ),
donde x∗ es constante y χk es una funcion lentamente creciente. Entonces,
S(τ)δ(x− x∗) = S(τ)δ(x− ϕk(τ)) +OD′(ε).
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 95
y
x
ω
y
x
ω0(η)
y
x
ω0(θη + β1σ)
Figura 5.7: (a) ω; (b) ω0(η); (c) ω0(θη + β1σ)
Claramente en nuestro problema se sigue que |χi(τ)| 6 c |τ |Nk pues:
|χi(τ)| = |biσ + b2ϕ11 − b1ϕ21| = |bi[τ + ϕ21 − ϕ11] + b2ϕ11 − b1ϕ21|6 |bi[τ + ϕ21 − ϕ11]|+ |b1ϕ11|+ |b1ϕ21|6 |biτ |+ |biϕ21|+ |biϕ11|+ |b2ϕ11|+ |b1ϕ21|= |bi| |τ |+ |ϕ21| [|bi|+ |b1|] + |ϕ11| [|bi|+ |b2|]= c0 |τ |+ |ϕ21| c1 + |ϕ11| c26 c0 |τ |Ni + c4c1 + c3c2
= c |τ |Ni
Como se satisfacen las hipotesis del Lema 5.1 tenemos que
(εux)2 = εa2
2∑
i=1
βiδ(x− Φi)− 2β1λ1(σ)δ(x− x∗)
+OD′(ε2). (5.28)
Por ultimo, se sigue que
∂
∂x(εux)
2 = εa2
2∑
i=1
βiδ′(x− Φi)− 2β1λ1δ
′(x− x∗)
+OD′(ε2).
Los calculos para los otros terminos en el lado izquierdo de (5.7), se obtienen como acontinuacion se muestra.
Para el termino (εut)2:
Derivando el anzatz (5.14)con respecto a t se sigue que:
ut = −S1β1
εω0
(S1β1
x− Φ1
ε
)Φ1t− S2β2
εω0
(S2β2
x− Φ2
ε
)Φ2t
. (5.29)
Tesis de Maestrıa

96 5.3. Construccion de la Solucion asintotica
Ahora, por la definicion de Φi dada en (5.15) se sigue que
Φit = ϕ′i0(t) + εϕ′
i1(τ)τ′
= Vi + [ϕ′20(t)− ϕ′
10(t)]ϕ′i1(τ)
= Vi + νϕ′i1(τ)
= ν[bi + ϕ′i1(τ)], (5.30)
donde hicimos uso de las definiciones de ν, bi y ϕi0.
Entonces, denotando por ω0,i = ω0
(Siβi
x−Φi
ε
)tenemos:
εut = −S1β1ω0,1Φ1t− S2β2ω0,2Φ2t
, (5.31)
de aquı que,
(εut)2 =
[−S1β1ω0,1Φ1t
− S2β2ω0,2Φ2t
] [−S1β1ω0,1Φ1t
− S2β2ω0,2Φ2t
]
= S21β
21ω
20,1(Φ1t
)2 + S22β
22ω
20,2(Φ2)
2 + 2S1S2β1β2ω0,1ω0,2Φ1tΦ2t
Ahora, como S1 = 1 y S2 = −1 tenemos:
(εut)2 = β2
1ω20,1(Φ1t
)2 + β22ω
20,2(Φ2t
)2 − 2β1β2ω0,1ω0,2Φ1tΦ2t
. (5.32)
Los tres terminos importantes en la igualdad (5.32) son ω20,1, ω
20,2 y ω0,1ω0,2 los cuales
analizaremos a continuacion:
Para los primeros dos terminos se sigue que:∫ ∞
−∞ω2
0,1ψ(x)dx = εψ(Φi)
∫ ∞
−∞ω2
0,i(βiξ)dξ +O(ε2),
donde utilizamos los resultados ya descritos para el termino (εux)2.
Utilizando el hecho de que a2 =∫∞−∞ ω2
0(η)dη = 1βi
∫∞−∞ ω2
0(η)dη entonces tenemos que:
∫ ∞
−∞ω2
0,iψ(x)dx =εa2
βi
ψ(Φi) +O(ε2), (5.33)
en el sentido de distribuciones:
ω20,i =
εa2
βi
δ(x− Φi) +OD′(ε2), (5.34)
luego, por (5.30) tenemos:
ω20,i(Φit)
2 =ν2εa2
βi
b2i δ(x− Φi) + 2ν2εa2
βi
biϕ′i1δ(x− Φi) +
ν2εa2
βi
(ϕ′i1)
2δ(x− Φi).
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 97
Ahora, utilizaremos el Lema 5.1 ya que las funciones ϕ′i1 son funciones del espacio de
Schwartz y Φi = x∗ + εχi entonces:
ω20,i(Φi)
2 =ν2εa2
βi
b2i δ(x− Φi) + 2ν2εa2
βi
ϕ′i1δ(x− x∗)
+ βiν2εa2(ϕ
′i1)
2δ(x− x∗) +OD′(ε2).
Para el tercer termino en (5.32) se sigue que∫ ∞
−∞ω0
(−β1
x− Φ1
ε
)ω0
(β2x− Φ2
ε
)ψ(x)dx
= εψ(Φ2)
∫ ∞
−∞ω0(β1(σ + ξ))ω0 (β2ξ)dξ +O(ε2), (5.35)
donde utilizamos los calculos ya realizados para el termino (εux)2. Haciendo el cambio de
variables
η = β2ξ y β1(σ + ξ) = β1
(σ +
η
β2
)= β1σ + θη
donde θ = β1
β2tenemos:
=εψ(Φ2)
β2
∫ ∞
−∞ω0(β1σ + θη)ω0(η)dη
=εψ(Φ2)
β2
a2λ1(σ) +O(ε2), (5.36)
donde como ya mencionamos anteriormente λ1(σ) es una funcion de Schwartz.
En el sentido de distribuciones tenemos que:
ω0,1ω0,2 =εa2
β2
λ1(σ)δ(x− Φ2) +OD′(ε2). (5.37)
Utilizando nuevamente el Lema 5.1 se sigue que
ω0,1ω0,2 =εa2
β2
λ1(σ)δ(x− x∗).
Notemos que Φ1tΦ2t
= ν2[b1b2 + b1ϕ′21 + b2ϕ
′11 + ϕ′
11ϕ′21], entonces
ω0,1ω0,2(Φ1tΦ2t
) = ν2 εa2
β2
λ1(σ)δ(x− x∗)[b1b2 + b1ϕ′21 + b2ϕ
′11 + ϕ′
11ϕ′21].
Ası,
−2β1β2ω0,1ω0,2[Φ1tΦ2t
] = −2β1ν2εa2λ1(σ)δ(x− x∗)[b1b2 + b1ϕ
′21 + b2ϕ
′11 + ϕ′
11ϕ′21].
Tesis de Maestrıa

98 5.3. Construccion de la Solucion asintotica
Luego,
(εut)2 = εa2ν
2
2∑
i=1
[βib2i δ(x− Φi) + 2βibiϕ
′i1δ(x− x∗) + βi(ϕ
′i1)
2δ(x− x∗)]
− 2εa2ν2β1λ1(σ)δ(x− x∗)Φ1t
Φ2t
= εa2ν2
2∑
i=1
βib2i δ(x− Φi) +K1δ(x− x∗)
+OD′(ε2) (5.38)
donde K1 =∑2
i=1 βiϕ′i1(2bi + ϕ′
i1)− 2β1λ1Φ1Φ2.
Por ultimo se sigue que,
∂
∂x(εut)
2 = ν2εa2
2∑
i=1
βib2i δ
′(x− Φi) +K1δ′(x− x∗)
+OD′(ε2) (5.39)
Ahora analicemos los calculos para el termino (ε2utux):
De las ecuaciones (5.17), (5.18), (5.29) y (5.31) conocemos los valores de ux, ut, εux
y εut, entonces
ε2utux =
[−
2∑
i=1
Siβiωi,0Φit
][2∑
i=1
βiSiωi,0
]
=
[−β1ω0
(β1x− Φ1
ε
)Φ1t
+ β2ω0
(β2x− Φ2
ε
)Φ2t
]
×[β1ω0
(β1ω0
(β1x− Φ1
ε
)− β2ω0
(β2x− Φ2
ε
))]
= −β21ω
20,1Φ1t
+ β1β2ω0,1ω0,2Φ1t+ β1β2ω0,1ω0,2Φ2t
− β22ω
20,2Φ2t
= −2∑
i=1
β2i Φitω
2i,0 + β1β2(Φ1t
+ Φ2t)ω0,1ω0,2 (5.40)
Ahora,∫ ∞
−∞ε2utuxψ(x)dx = −
2∑
i=1
∫ ∞
−∞
β2
i Φitω2i,0 + β1β2(Φ1t
+ Φ2t)ω0,1ω0,2
ψ(x)dx (5.41)
Para el primer termino de la derecha en la ecuacion (5.41) ya hemos realizado loscalculos pertinentes a traves de los casos (εux)
2 y (εut)2 descritos en las ecuaciones (5.33),
(5.34). Luego,
ω2i,0Φi =
εa2
βi
ν(bi + ϕ′i1)δ(x− Φi)
=νεa2biβi
δ(x− Φi) +νεa2
βi
ϕ′i1δ(x− Φi) (5.42)
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 99
Ahora, utilizando el Lema 5.1 ya que las funciones ϕ′i1 son funciones de Schwartz como
se observa en la figura 5.8 y Φi = x∗ + εχi entonces (5.42) es
0
(a)
0
(b)
Figura 5.8: (a) ϕi1; (b) ϕ′i1. Las funciones ϕ′
i1 son de Schwartz.
νεa2biβi
δ(x− Φi) +νεa2
βi
ϕ′i1δ(x− x∗) +OD′(ε2) (5.43)
Ahora, el termino
β2i ω
20iΦi = νεa2biβiδ(x− Φi) + νεa2βiϕ
′i1δ(x− x∗) +OD′(ε2)
= νεa2[biβiδ(x− Φi) + βiϕ′i1δ(x− x∗)] +OD′(ε2).
Ahora, para el segundo termino en (5.41) igual que antes tenemos la expresion (5.36)y en el sentido de distribuciones se sigue la ecuacion (5.37). Entonces
ω0,1ω0,2(Φ1t+ Φ2t
) = −ν εa2
β2
λ1(σ)δ(x− x∗)[b1 + b2 + ϕ′11 + ϕ′
21].
Luego,
ε2utux = −νεa2
2∑
i=1
[biβiδ(x− Φ) + βiϕ′i1δ(x− x∗)]
+ νεa2β1λ1(σ)δ(x− x∗)[2∑
i=1
bi +2∑
i=1
ϕ′i1]
= −νεa2
2∑
i=1
biβiδ(x− Φ)− νεa2
2∑
i=1
βiϕ′i1δ(x− x∗)
+ εa2β1λ1
2∑
i=1
Φitδ(x− x∗)
= −νεa2
2∑
i=1
biβiδ(x− Φi)− εa2
[2∑
i=1
(βiϕ′i1 − β1λ1Φit)
]δ(x− x∗)
+ OD′(ε2)
Tesis de Maestrıa

100 5.3. Construccion de la Solucion asintotica
Denotemos por K2 =∑2
i=1(βiϕ′i1 − β1λ1Φit), entonces
ε2utux = −νεa2
2∑
i=1
biβiδ(x− Φi)− εa2K2δ(x− x∗) +OD′(ε2).
Finalmente,
∂
∂t(ε2utux) = νεa2
2∑
i=1
biβiδ′(x− Φi)Φit − εa2
dK2
dtδ(x− x∗) +OD′(ε2)
= ν2εa2
2∑
i=1
biβiδ′(x− Φi)[bi + ϕ′
i1]− εa2dK2
dtδ(x− x∗) +OD′(ε2)
= ν2εa2
2∑
i=1
b2iβiδ′(x− Φi) + ν2εa2
2∑
i=1
biβiϕ′i1δ
′(x− Φ)
− εa2dK2
dtδ(x− x∗) +OD′(ε2).
Nuevamente, ϕ′i1 ∈ S entonces:
∂
∂t(ε2utux) = ν2εa2
2∑
i=1
b2iβiδ′(x− Φi) + ν2εa2
2∑
i=1
biβiϕ′i1δ
′(x− x∗)
− εa2dK2
dtδ(x− x∗) +OD′(ε2).
Ahora, realicemos los calculos para el termino 2F (u):
Claramente,
F (u) = F
[2∑
i=1
ω
(Siβi
x− Φ
ε
)]= F
[ω
(S1β1
x− Φ1
ε
)+ ω
(S2β2
x− Φ2
ε
)]
Escribamos, F (u) =∑2
i=1 F (ωi) + F (u)−∑2i=1 F (ωi) entonces
F (u)ψ(x) =2∑
i=1
F (ωi)ψ(x) +
[F (u)−
2∑
i=1
F (ωi)
]ψ(x).
Luego,
∫ ∞
−∞F (u)ψ(x)dx =
2∑
i=1
∫ ∞
−∞F (ωi)ψ(x)dx+
∫ ∞
−∞
[F (u)−
2∑
i=1
F (ωi)
]ψ(x)dx (5.44)
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 101
Analicemos los terminos de la derecha en la ecuacion (5.44). Para el primer termino,tenemos:
∫ ∞
−∞F (ωi)ψ(x)dx =
∫ ∞
−∞F
[ω
(βiSi
x− Φi
ε
)]ψ(x)dx
=
∫ ∞
−∞F
[ω
(βix− Φi
ε
)]ψ(x)dx, (5.45)
pues las propiedades ω(η) + ω(−η) = 1 y F (z + 1) = F (z) hacen que
F [ω(Siη)] = F
[ω
(Siβi
x− Φi
ε
)]= F
[ω
(−β2
x− Φ2
ε
)]
= F
[1− ω
(β2x− Φ2
ε
)]= F
[−ω
(β2x− Φ2
ε
)]
= F
[−ω
(β2x− Φ2
ε
)]= F [−ω(η)] = F [Siω(η)] = F [ω(η)].
Esto es,
F [ω (Siη)] = F [Siω(η)] = F [ω(η)] (5.46)
En (5.45) hacemos el cambio ηi = βix−Φi
εy haciendo uso de la formula de Taylor de
primer orden entonces,
=ε
βi
∫ ∞
−∞F (ω(ηi))ψ
(Φi + ε
ηi
βi
)dηi
=ε
βi
ψ(Φi)
∫ ∞
−∞F (ω(ηi))
[ψ(Φi) +
ε
βi
ηiψ′(Φ) +O(ε2)
]dηi
=ε
βi
ψ(Φi)
∫ ∞
−∞F (ω(ηi))dηi +O(ε2) =
ε
βi
a2
2ψ(Φi) +O(ε2),
donde se hizo uso de la igualdad a2
2:=∫∞−∞ F (ω(ηi))dηi. En el sentido de distribuciones
tenemos:
F (ωi) =ε
βi
a2
2δ(x− Φi) +OD′(ε2). (5.47)
Tesis de Maestrıa

102 5.3. Construccion de la Solucion asintotica
Ahora, para el segundo termino denotando ω(βiSix−Φi
ε) = ωi se tiene que:
∫ ∞
−∞
[F (u)−
2∑
i=1
F (ωi)
]ψ(x)dx =
∫ ∞
−∞F [ω1 + ω2]− F [ω1]− F [ω2]ψ(x) dx
=ε
β1
∫ ∞
−∞F
[ω(S1η1) + ω
(S2η1 − β1σ
θ
)]×
ψ
(Φ1 +
εη1
β1
)dη1
−∫ ∞
−∞F [ω(S1η1)]ψ
(Φ1 +
εη1
β1
)dη1
+
∫ ∞
−∞F
[ω
(S2η1 − β1σ
θ
)]ψ
(Φ1 +
εη1
β1
)dη1
=ε
β1
∫ ∞
−∞F
[ω(S1η1) + ω
(S2η1 − β1σ
θ
)]×
[ψ(Φ1) +
ε
β1
η1ψ′(Φ1) +Oε2
]dη1
=ε
β1
ψ(Φ1)
∫ ∞
−∞
[Fω(S1η1) + ω
(S2η1 − β1σ
θ
)]dη1
−∫ ∞
−∞F [ω(S1η1)]dη1
−∫ ∞
−∞F
[ω
(S2η1 − β1σ
θ
)]dη1 +O(ε2)
=ε
β1
A1ψ(Φ1) +OD(ε2).
En la segunda igualdad hicimos el cambio de variables η1 = β1x−Φ1
εası, β2
x−Φ2
ε=
η1−β1σθ
. En la tercera igualdad aplicamos nuevamente la formula de Taylor de primerorden y tambien aplicamos la ecuacion (5.46) y denotamos a
A1 =
∫ ∞
−∞
F
[S1ω(η1) + ω
(S2η1 − β1σ
θ
)]− F [S1ω(η1)]− F
[ω
(S2η1 − β1σ
θ
)]dη1.
En el sentido de distribuciones se sigue que:[F (u)−
2∑
i=1
F (ωi)
]=
ε
β1
A1δ(x− Φ1) +OD′(ε2).
Si en A1 se hace el cambio η2 = η1−β1σθ
entonces se tiene:
A1 = θ
∫ ∞
−∞F [S1ω (θη2 + β1σ) + ω(S2η2)]− F [S1ω (θη1 + β1σ)]− F [ω(S2η2)] dη2.
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 103
Denotemos como
a2
2B∆ :=
∫ ∞
−∞F [S1ω (θη2 + β1σ) + ω(S2η2)]− F [S1ω(θη2 + β1σ)]− F [ω(S2η2)]dη2, (5.48)
entonces,
A1 = θa2
2B∆.
De modo que:
∫ ∞
−∞
[F (u)−
2∑
i=1
F (ωi)
]ψ(x)dx =
ε
β1A1ψ(Φ1) +O(ε2)
=ε
β1
a2
2θB∆ψ(Φ1) +O(ε2)
=ε
β2
a2
2B∆ψ(Φ1) +O(ε2).
Por otra parte, si en el segundo termino de la ecuacion (5.44) se hace el cambio η2 = β2x−Φ2
εse obtendra ∫ ∞
−∞
[F (u)−
2∑
i=1
F (ωi)
]ψ(x)dx =
ε
β2
a2
2B∆ψ(Φ2) +O(ε2)
Ası, ∫ ∞
−∞
[F (u)−
2∑
i=1
F (ωi)
]ψ(x)dx =
ε
β2
a2
2B∆
ψ(Φ1)ψ(Φ2)
+O(ε2),
En el sentido de distribuciones:[F (u)−
2∑
i=1
F (ωi)
]ψ(x)dx =
ε
β2
a2
2B∆
δ(x− Φ1)δ(x− Φ2)
+OD′(ε2).
Como
B∆ :=2
a2
∫ ∞
−∞F [S1ω(θη + β1σ) + ω(S2η)]− F [S1ω(θη + β1σ)]− F [ω(S2η)]dη (5.49)
es de Schwartz, finalmente obtenemos:
[F (u)−
2∑
i=1
F (ωi)
]ψ(x)dx =
ε
β2
a2
2B∆δ(x− x∗) +OD′(ε2). (5.50)
Sustituyendo (5.47) y (5.50) en (5.44) obtenemos:
F (u) =εa2
2
[2∑
i=1
1
βiδ′(x− Φi) +
B∆
β2δ′(x− x∗)
]+OD′(ε2),
Tesis de Maestrıa

104 5.3. Construccion de la Solucion asintotica
de donde se sigue que,
∂
∂x[2F (u)] = εa2
[2∑
i=1
1
βiδ′(x− Φi) +
B∆
β2δ(x− x∗)
]+OD′(ε2).
Observese que de las propiedades ω(η) + ω(−η) = 1, F (z + 1) = F (z) = F (z − 1) yF (−z) = F (z) se deduce que
B∆ :=2
a2
∫ ∞
−∞F [ω(θη + β1σ)− ω(η)]− F [ω(θη + β1σ)]− F [ω(η)]dη
:=2
a2
∫ ∞
−∞F [ω(η)− ω(θη + β1σ)]− F [ω(θη + β1σ)]− F [ω(η)]dη.
Entre otras cosas, calculando las asintoticas debiles para los terminos del lado izquierdo dela ecuacion (5.7), obtenemos algunas convoluciones. Introduzcamos la siguiente notacion:
λ2(σ) =1
a2
∫ ∞
−∞ηω0(η)ω0(θη + β1σ)dη, λ2(σ) =
1
a2
∫ ∞
−∞ηω0(η)ω0
(η − β1σ
θ
)dη, (5.51)
B∆(σ) =2
a2
∫ ∞
−∞F (ω(η)− ω(θη + β1σ))− F (ω(η))− F (ω(θη + β1σ)) dη. (5.52)
Lema 5.2. (Propiedades de las convoluciones.) Bajo las hipotesis A-D las convoluciones(5.23), (5.51) y (5.52) existen y tienen las siguientes propiedades cuando σ → ±∞:
∣∣σ2λ1(σ)∣∣ 6 cte., |σλ2(σ)| 6 cte.,
∣∣σ2B∆(σ)∣∣ 6 cte. (5.53)
Mas aun, B∆ < 0 para |σ| suficientemente grande y
λ2(σ) = θ (β1σλ1(σ) + θλ2(σ)) .
Demostracion: La existencia de las convoluciones es clara, ya que ω0 satisface la estimacion:
∫ ∞
−∞(εux)2 ψ(x)dx = ε
2∑
i=1
β2i
∫ ∞
−∞ω2
0(βiξ)ψ(Φi + εξ)dξ
− 2εβ1β2
∫ ∞
−∞ω0(β2ξ)ω0(β1ξ + β1σ)ψ(Φ2 + εξ)dξ
y se anula con rapidez no menor a 1η2 . Luego, cuando k = 1 en la hipotesis B), la funcion ω0
tiene una rapidez exponencial de anulacion. Lo mismo es valido para las convoluciones.
Consideremos el caso k = 3 y, consecuentemente, ω0 se anula cuando |η|−2.
Para nuestro objetivo sera suficiente estimar la convolucion:
λ(n) =
∫ ∞
−∞ηnω0(η)ω0(η + σ)dη σ ≫ 1,
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 105
donde n = 1 o 2.
Reescribamos λ(n) como la suma de integrales:
λ(n) =
∫ −σ2
−∞+
∫ ∞
−σ2
ηnω0(η)ω0(η + σ)dη
para estimar la ultima integral utilizamos la siguiente desigualdad:
|η|n ω0(η + σ) 6 Cσ−2+n |z|n(1 + z)2
∣∣∣z= η
σ
6 Cσ−2+n para z > −1
2, (5.54)
donde C es una constante, pues el maximo absoluto de la funcion z → |z|n(1+z)2
en z > −1/2 es
menor que 1. Para la primera integral cambiamos la variable η′ = η + σ y estimamos comosigue:
1
n
∣∣∣∣∣
∫ −σ2
−∞ηnω0(η)ω0(η + σ)dη
∣∣∣∣∣ 6∫ σ
2
−∞|η|n ω0(η)ω0(η − σ)dη + σn
∫ σ2
−∞ω0(η)ω0(η − σ)dη.
Ahora, es claro que es suficiente usar una desigualdad similar a (5.54) para la primeraintegral y la desigualdad ω0(σ − η) 6 Cσ−2, η 6 σ
2 , para la segunda.
Para probar el ultimo resultado del lema es suficiente utilizar la periodicidad de F y lasdesigualdades:
ω(η) = 1 + v(η) cuando η →∞, ω(η) = v(η) cuando η → −∞,
donde v(η) es una funcion que se anula exponencialmente en el caso k = 1 y |v(η)| 6 cte|η| cuando
k = 3.
Ahora, podemos resumir los resultados obtenidos al calcular las asintoticas debiles en elsiguiente lema:
Lema 5.3. Supongamos que A)-D) y (5.16) se satisfacen. Entonces, las siguientes relacionesson validas:
(εut)2 = εa2v
2
2∑
i=1
βib2i δ(x− Φi) +K1δ(x− x∗)
+OD′(ε2), (5.55)
F (u) = εa2
2
2∑
i=1
1
βiδ(x− Φi) +
B∆
β2δ(x− x∗)
+OD′(ε2), (5.56)
∂
∂t(ε2utux) = −a2ν
2 dK2
dτδ(x− x∗) + εa2ν
2 d
dτ
(2∑
i=1
βibiϕi1 +W
)δ′(x− x∗)
+ εa2ν2
2∑
i=1
βib2i δ
′(x− Φi) +OD′(ε2). (5.57)
Tesis de Maestrıa

106 5.3. Construccion de la Solucion asintotica
Aquı y en lo que sigue:
K1 =
2∑
i=1
βiϕ′i1(2bi + ϕ′
i1)− 2βiλ1Φ1tΦ2t ,
K2 =2∑
i=1
βiϕ
′i1 − β1λ1Φit
,
W = K2χ2 + β1ϕ′11(χ1 − χ2)− θλ2
2∑
i=1
Φit , (5.58)
Φit = bi + ϕ′i1, ϕ′
i1 :=dϕi1
dτ. (5.59)
Usando las formulas (5.28) y (5.55)-(5.59) obtenemos que el lado izquierdo de (5.9) es unacombinacion lineal de las funciones δ(x− x∗), δ′(x− x∗) y δ′(x− Φi):
2∑
i=1
[−βi + ν2βib
2i +
1
βi
]δ′(x− Φi) +
(dK2
dτ
)δ(x− x∗)+
[2β1λ1 − ν2K1 + ν2 dK3
dτ+B∆
β2
]δ′(x− x∗) = OD′(ε2),
(5.60)
donde K3 =∑2
i=1 βibiϕi1 +W.
Como estas funciones son linealmente independientes, los coeficientes de las funciones δ y δ′
tienen que ser cero. Ası, obtenemos el siguiente sistema de ecuaciones:
dK2
dτ= 0, (5.61)
βi
(b2i −
1
ν2
)+
1
βiν2= 0, i = 1, 2 (5.62)
[2dW
dτ+ 2
2∑
i=1
βibiϕ′i1
]= K1 −
1
ν2
(2β1λ1 +
B∆
β2
). (5.63)
De las igualdades (5.62) se obtiene lo siguiente:
0 = βi
(b2i −
1
ν2
)+
1
βiν2= βi + ν2b2iβi
= βi
[βi + ν2b2iβi +
1
βi
]= β2
i + ν2b2iβ2i + 1
= β2i
(1 + ν2b2i
)+ 1,
de aquı que β2i = −1
1+ν2b2i, entonces β2
i = 11−ν2b2i
= 11−V 2
i
. Es decir, β2i = 1
1−V 2i
.
Tomando en cuenta la condicion ϕ′i1 → 0 cuando τ → ±∞ e integrando (5.61), obtenemos
la igualdad:2∑
i=1
βiϕ
′i1 − β1λ1Φit
= 0 (5.64)
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 107
Esto y la definicion (5.21) de la funcion σ = σ(τ) nos ayudan a reescribir ϕ′i1 en terminos
de σ′τ = dσdτ . Claramente de (5.21) tenemos:
σ′ =dσ
dτ= 1 + ϕ′
21 − ϕ′11 (5.65)
Ahora, resolvamos el sistema (5.64), (5.65) con respecto a ϕ′11, ϕ
′21:
Por la primera ecuacion en (5.59) tenemos que (5.64) es:
β1ϕ′11 − β1λ1(b1 + ϕ′
11) + β2ϕ′21 − β1λ1(b2 + ϕ′
21) = 0
utilizando la igualdad b2 − b1 = 1 se sigue que:
β1ϕ′11 − β1λ1(b1 + ϕ′
11) + β2ϕ′21 − β1λ1
[1 + b1 + ϕ′
21
]= 0
Factorizando ϕ′11 y ϕ′
21:
ϕ′11 [λ1 − β1λ1]− β1λ1b1 + ϕ′
21 [β2 − β1λ1]− β1λ1 − β1λ1b1 = 0
Despejando ϕ′11 y utilizando el valor que obtenemos para ϕ′
21 de la ecuacion (5.65), se sigue que
ϕ′11 =
2β1λ1b1 + β1λ1 − ϕ′21 [β2 − β1λ1]
β1 − β1λ1
=2β1λ1b1 + β1λ1 − [σ′ − 1] [β2 − β1λ1]− ϕ′
11 [β2 − β1λ1]
β1 − β1λ1,
entonces
ϕ′11 [β1 − β1λ1 + β2 − β1λ1] = 2β1λ1b1 + β1λ1 − σ′β2 + σ′β1λ1 + β2 − β1λ1,
ası,
ϕ′11 =
(θλ1 − 1)σ′ + 1 + 2θλ1b11 + θ − 2θλ1
y despejando ϕ′21 y sustituyendo el valor que obtenemos para ϕ′
11 de la ecuacion (5.65) se sigueque
ϕ′21 =
2β1λ1b1 + 2β1λ1 − β1 + β1σ′ − β1λ1σ
′
β2 + β1 − 2β1λ1,
de aquı que:
ϕ′21 =
2θλ1b2 − θ + σ′(θ − θλ1)
1 + θ − 2θλ1.
Ası, obtenemos las siguientes ecuaciones:
dϕ11
dτ= −FG1,
dϕ21
dτ= θFG2, (5.66)
donde
F = (1 + θ − 2θλ1)−1, G1 = (1− θλ1)σ
′ − 1− 2θb1λ1 y G2 = (1− λ1)σ′ − 1 + 2b2λ1 (5.67)
Tesis de Maestrıa

108 5.3. Construccion de la Solucion asintotica
Note que el lado derecho de las ecuaciones (5.66) dependen de σ la cual trataremos ahoracomo una funcion desconocida. Para completar el sistema tenemos que usar la ultima igualdaden el sistema (5.61)-(5.63). Para simplificarlo, primeramente notemos que las igualdades (5.64)y (5.66) nos ayudan a reescribir la expresion para W definida en (5.58) de la siguiente manera:
W = (β1σ + θλ2)FG1 − θ2λ2FG2 − θ(b1 + b2)λ2,
donde hemos usado la igualdad∑2
i=1−β1λ1(bi + ϕ′i1) = −∑2
i=1 βiϕ′i1, la cual se sigue de la
ecuacion (5.64) y despues aplicar las ecuaciones dadas en (5.66).
Manipulaciones algebraicas simples nos llevan a la igualdad:
W
F = Ldσ
dτ− β1σ − 2(b1λ2 + θb2λ2), (5.68)
donde,L = β1σ + θλ2 − λ2. (5.69)
Despejandodσ
dτde (5.68) y
dW
dτde (5.63) obtenemos el sistema autonomo de primer orden
dσ
dτ= Q,
dW
dτ= P, (5.70)
donde
Q =1
L
W
F + β1σ + 2(b1λ2 + θb2λ2)
,
P =Fβ1
2
(1− θλ2
1)Q2 − 2[1− λ1(b2 − θb1)]Q+ 1− 2λ1(θb
21 + b22)
− β1
ν2
(λ1 +
B∆
2β1β2
),
De hecho, de (5.68) tenemos:
dσ
dτ=
1
L
W
F + β1σ + 2(b1λ2 + θb2λ2)
;
ademas, (5.63) se puede escribir como
dK3
dτ=
2∑
i=1
βibiϕ′i1 +
dW
dτ=
1
2
[K1 +
2
ν2
(−β1λ1 −
1
2β2B∆
)]
y ası,
dW
dτ=
1
2
[K1 +
2
ν2
(−β1λ1 −
1
2β2B∆
)]−
2∑
i=1
βibiϕ′i1
=1
2
[K1 − 2
2∑
i=1
βibiϕ′i1
]+
1
ν2
(−β1λ1 −
1
2β2B∆
).
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 109
Definamos condiciones iniciales para el sistema (5.70).
De (5.68) tenemos que
W = FL
dσ
dτ− β1σ − 2(b1λ2 + θb2λ2)
La primera hipotesis en (5.16) y la definicion de σ dada en (5.21) implican que σ → τ cuando
τ → −∞, luegodσ
dτ→ 1 cuando τ → −∞. Ademas, λ2(σ) → 0 y λ2(σ) → 0 cuando τ → −∞.
Mas aun, L = β1σ+θλ2−λ2 → β1σ cuando σ → −∞. Finalmente, F = (1+θ−2θλ1(σ))−1 → 11+θ
cuando τ → −∞. Por lo tanto, W → 0 cuando τ → −∞.Por lo que tenemos la condicion inicial:
σ
τ→ 1, W → 0 cuando τ → −∞ (5.71)
La segunda suposicion en (5.16) y (5.21),(5.68) implican que σ y W necesitan tener losmismos valores lımites (5.71) cuando τ →∞. Ası, la validez de nuestras hipotesis es equivalentea la existencia de una trayectoria γs = (σ = σs(τ),W = Ws(τ)) que satisface la condicion (5.71)y
σs
τ→ 1, Ws → 0 cuando |τ | → ∞
5.4 Analisis del sistema dinamico basico.
Pasando a las variables τ ′ = β1τ , σ′ = β1σ y omitiendo las primas, reescribimos el sistema (5.70)
en la misma forma pero con los lados derechos mas sencillos:
Q =1
L
W
F + σ + 2(b1λ2 + θb2λ2)
, (5.72)
P =F2
(1− θλ2
1)Q2 − 2[1− λ1(b2 − θb1)]Q+ 1− 2λ1(θb
21 + b22)
− 1
ν2
(λ1 +
B∆
2β1β2
). (5.73)
Aquı, L, F y las convoluciones tienen la forma:
L = σ + θλ2 − λ2, F = (1 + θ − 2θλ1)−1,
λi(σ) =1
a2
∫ ∞
−∞ηi−1ω0(σ + θη)ω0(η)dη, i = 1, 2
λ2 =1
a2
∫ ∞
−∞ηω0(η)ω0
(η − σθ
)dη = θ(σλ1 + θλ2)
B∆ =2
a2
∫ ∞
−∞[F (ω(θη + σ)− ω(η))− F (ω(θη + σ))− F (ω(η))] dη.
Tesis de Maestrıa

110 5.4. Analisis del sistema dinamico basico.
Para realizar un analisis mas detallado, usamos las propiedades de las convoluciones que seenuncian a continuacion:
Lema 5.4. Bajo las hipotesis del Lema 1 las siguientes relaciones son validas:
λ1(−σ) = λ1(σ) > 0, λ1(σ) = λ01 +O(σ2) cuando σ → 0
sgn(σλ2(σ)) = −1, sgn(σλ2(σ)) = 1
λ2(−σ) = −λ2(σ), λ2(−σ) = −λ2(σ),
λ2(σ) = σλ12 +O(σ3), λ2(σ) = σλ1
2 +O(σ3) cuando σ → 0,
B∆(−σ) = B∆(σ), B∆(σ) = B0∆ +O(σ2)
dondeλ0
1 = λ1(0), B0∆ = B∆(0),
λ12 =
1
a2
∫ ∞
−∞ηω0(η)
dω0(z)
dz
∣∣∣z=θη
dη < 0, λ12 = − 1
a2θ
∫ ∞
−∞ηω0(η)
dω0(z)
dz
∣∣∣z= η
θ
dη > 0.
Demostracion: Indicaremos unicamente la prueba de la relacion λ2(σ) = σλ12 +O(σ3).
Usando la formula de Taylor de primer orden y tomando en cuenta que ω0 es par, obtenemos:
λ2(σ) = σλ12 + σ3β
31
6
∫ ∞
−∞ηω0(η)ω
′′′0 (θη + ξβ1σ)dη, (5.74)
donde ξ ∈ [0, 1]. Reescribimos la ultima integral como la siguiente suma:∫ −1
−∞+
∫ ∞
1+
∫ ∞
1
ηω0(η)ω
′′′0 (θη + ξβ1σ)dη, (5.75)
La segunda integral es acotada por una constante. Para la ultima integral tomamos en cuentaque
θη + ξβ1σ > cte · η para |σ| ≪ 1,
uniformemente en ξ ∈ [0, 1].
Consideraciones similares para la primera integral en (5.75) implican que el residuo en (5.74)es del orden O(σ3).
Estas propiedades y las formulas (5.67),(5.69),(5.72),(5.73) implican los siguientes resulta-dos:
Corolario 5.1. El sistema (5.70) es invariante con respecto al cambio de variables
τ → −τ, σ → −σ, W → −W.
Corolario 5.2. Bajo las hipotesis del lema 5.2:
L∣∣∣σ=0
= 0 (5.76)
y las siguientes estimaciones son validas uniformemente en σ
(1 + θ)−1 6 F 6 (1 + θ − 2θλ01)
−1 = F0 6 (1−√θ)−2. (5.77)
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 111
Por el Lema 5.4 sabemos que λ2(σ) es impar, entonces
λ2(σ) = λ2(0) +dλ2
dσ(σ)∣∣∣σ=0
(σ)
= λ12σ + λ3
2σ3 + λ5
2σ5 + · · ·
= λ12σ +O(σ3);
como λ2(σ) = 1a2
∫∞−∞ ηω0(η)ω0(θη + β1σ)dη, de aquı que
dλ2
dσ=β1
a2
∫ ∞
−∞ηω0(η)
ω0(z)
dz
∣∣∣θηdη,
entonces
λ12 =
β1
a2
∫ ∞
−∞ηω0(η)
dω0(θη)
dzdη.
Similarmente, para λ2.
La igualdad (5.76) muestra que el sistema (5.70),(5.72),(5.73) tiene una singularidad en larecta (0,W ) en el plano (σ,W ). Asumiremos que esta singularidad es de tipo 1
σ y que no hayotros puntos de singularidad. Por lo tanto, elegimos la hipotesis adicional:
E1) Sean la funcion F y el numero θ = β1
β2tales que las siguientes desigualdades se cumplen:
L(σ) > 0 para σ > 0, L1 =dL
dσ
∣∣∣σ=0
> 0.
Notemos que la ultima condicion implica en particular la desigualdad
θ 6= 1 (5.78)
Recıprocamente, bajo la condicion (5.78) las estimaciones (5.77) garantizan que F 6 cteuniformemente en σ.
Ası, la singularidad de Q es de tipo 1σ . De hecho, para θ = 1 las singularidades de Q y P
son de tipo 1σ nuevamente. Sin embargo, este caso necesita considerarse separadamente y aquı
supondremos la validez de la condicion (5.78).
Hacemos la observacion de que la hipotesis E1) se puede verificar para cualquier F no linealy para cualquier θ definido por los datos iniciales. Mas aun, esta hipotesis es realizable.
Ahora investiguemos cuando una trayectoria puede pasar del semi-plano izquierdo al dere-cho. Obviamente, esto puede pasar unicamente a traves del punto (0, 0), pues todo el eje W esuna singularidad del sistema.
Consideremos una vecindad pequena del origen de coordenadas. El Lema 5.4 implica queel sistema dinamico tiene la siguiente representacion para |σ| 6 1:
Tesis de Maestrıa

112 5.4. Analisis del sistema dinamico basico.
Primero, notese que
L = σ +Oλ2 − λ2
= σ + θσλ12 − σλ1
2 +O(σ3) cuando σ → 0
= σ[1 + θλ12 − λ1
2] +O(σ3)
= σL1 +O(σ3)
= σ[L1 +O(σ2)] cuando σ → 0.
donde L1 = [1 + θλ12 − λ1
2]. Tambien notese que
1
F = 1 + θ − 2θλ1
= 1 + θ − 2θ(λ01 +O(σ2)) por el Lema5.4
= 1 + θ − 2θλ01 +O(σ2) cuando σ → 0
= F−10 +O(σ2).
Ası, la primera ecuacion del sistema es:
dσ
dτ=
1
L
(W
F + σ + 2(b1λ2 + θb2λ2)
)
=1
σ [L1 +O(σ2)]
[(1
F0+O(σ2)
)W + σ + 2σ(b1λ
12 + θb2λ
12) +O(σ3)
]
=1
σ [L1 +O(σ2)]
[W
F0+ σ + 2σ(b1λ
12 + θb2λ
12) +O(σ2)W +O(σ3)
]
=σ
σ [L1 +O(σ2)]
[1
F0
W
σ+ 1 + 2(b1λ
12 + θb2λ
12) +O(σ)W +O(σ2)
],
entonces,dσ
dτ=
1
L1
[1
F0
W
σ+ 1 + 2(b1λ
12 + θb2λ
12)
]+O(σ)W +O(σ2).
de 1F +O(σ2) = 1+O(σ2)
O0se sigue que F = F0
11+O(σ2)
= F0(1−O(σ4) + · · · ).
En dWdτ , tomando F = F0:
dW
dτ=F2
(1− θλ2
1)Q2 − 2 [1− λ1(b2 − θb1)]Q+ 1− 2λ1(θb
21 + b22)
− 1
ν2
(λ1 +
B∆
2β1β2
)
=F0
2
(1− θ(λ0
1)2)Q2 − 2[1− λ0
1(b2 − θb1)]Q+R
+O(σ2),
con R = 1− 2λ01(θb
21 + b22)− 2
F0ν2
(λ0
1 +B0
∆2β1β2
).
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 113
Entonces, para |σ| 6 1, el sistema es,
dσ
dτ=
1
L1
[1
F0
W
σ+ 1 + 2(b1λ
12 + θb2λ
12)
]+O(σ)W +O(σ2) (5.79)
dW
dτ=F0
2
[(1− θ(λ0
1)2)
(dσ
dτ
)2
− 2(1− λ01(b2 − θb1))
dσ
dτ+R
]+O(σ2).
Ahora, podemos transformar el sistema (5.79) de la siguiente manera, despejando W de laprimera ecuacion en (5.79) tenemos:
W = F0σ
[L1
dσ
dτ− 1− 2(b1λ
12 + θb2λ
12)
]+O(σ2W + σ3) (5.80)
y derivando con respecto a τ :
dW
dτ= F0L1
d
dτ
(σ
dσ
dτ
)−[1 + 2(b1λ
12 + θb2λ
12)]F0
dσ
dτ+O
(σ
dW
dτ+ (W + σ)
dσ
dτ
),
sustituyendo en la segunda ecuacion de (5.79):
F0L1d
dτ
(σ
dσ
dτ
)−F0
[1 + 2(b1λ
12 + θb2λ
12)] dσ
dτ+O
(σ
dW
dτ+ (W + σ)
dσ
dτ
)
=F0
2
[(1− θ(λ0
1)2)
(dσ
dτ
)2
− 2(1− λ01(b2 − θb1))
dσ
dτ+R
]+O(σ2)
Luego,
2L1d2
dτ2(σ2)− 2[1 + 2(b1λ
12 + θb2λ
12)]
dσ
dτ+O
(σ
dW
dτ+ (W + σ)
dσ
dτ
)
= (1− θ(λ01)
2)
(dσ
dτ
)2
− 2(1− λ01(b2 − θb1))
dσ
dτ+R+O(σ2),
entonces
L1d2
dτ2(σ2) = (1− θ(λ0
1)2)
(dσ
dτ
)2
+[−2(1− λ0
1(b2 − θb1)) + 2(1 + 2(b1λ12 + θb2λ
12))] dσ
dτ
+ R+O(σ2) +O(σ
dW
dτ+ (W + σ)
dσ
dτ
),
ası
L1d2
dτ2(σ2) = (1 + θ(λ0
1)2)
(dσ
dτ
)2
+[2λ0
1(b2 − θb1) + 4(b1λ12 + θb2λ
12)] dσ
dτ
+ R+O(σ2) +O(σ
dW
dτ+ (W + σ)
dσ
dτ
),
Tesis de Maestrıa

114 5.4. Analisis del sistema dinamico basico.
teniendo en cuenta que λ2 = θ(σλ1 + θλ2) encontramos que
λ12 =
λ2
σ+O(σ2) =
θ(σλ1 + θλ2)
σ+O(σ2)
= θλ1(σ) + θ2λ2(σ)
σ+O(σ2)
= θλ1(σ) + θ2λ12 +O(σ2)
= θλ01 + θ2λ1
2 +O(σ2)
= θ(λ01 + θλ1
2) +O(σ2)
entonces,
2λ01(b2 − θb1) + 4(b1λ
12 + θb2λ
12) = 2λ0
1(b2 − θb1) + 4b1θ(λ01 + θλ1
2) + 4θb2λ12 +O(σ2)
= 2b2λ01 − 2θb1λ
01 + 4θb1λ
01 + 4θ2b1λ
12 + 4θb2λ
12 +O(σ2)
= 2b2λ01 + 2θb1λ
01 + 4θ2b1λ
12 + 4θb2λ
12 +O(σ2)
= 2(λ01 + 2θλ1
2)(b2 + θb1) +O(σ2)
= 2N +O(σ2).
donde, se toma
N = (λ01 + 2θλ1
2)(b2 + θb1). (5.81)
De aquı que,
L1d2
dτ2(σ2) = (1− θ(λ0
1)2)
(dσ
dτ
)2
+ 2Ndσ
dτ+R+O(σ2) +O
(σ
dW
dτ+ (W + σ)
dσ
dτ
). (5.82)
Ahora, aplicando el metodo de Cauchy-Kovalevskaya y tomando en cuenta que σ = σ(τ) esimpar, escribimos:
σ = a1τ + a3τ3 + a5τ
5 + · · · (5.83)
con coeficientes arbitrarios ai.
El metodo de Cauchy-Kovalevskaya es un metodo por medio del cual podemos encontrar lasolucion de una ecuacion diferencial parcial numericamente.
Para nuestro problema, primeramente escribimos la ecuacion (5.82) de la siguiente manera:
L1d2
dτ2(σ2)− (1− θ(λ0
1)2)
(dσ
dτ
)2
− 2Ndσ
dτ−R = 0
Entonces, para orden de τ0:
(2L1 − 1 + θ(λ01)
2)a21 − 2Na1 −R = 0.
Denotemos como M = 2L1 − 1 + θ(λ01)
2.
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 115
La ecuacion obtenida para orden de τ0 tiene solucion si y solo si N2+MR > 0. Supongamosque esto se satisface.En orden τ2 :
[2L1 +M ]a−Na3 = 0.
En orden τ4 :
(4L1 +M)a1 −Na5 =1
10[9(1− θ(λ0
1))2 − 30L1]a
23 = f5(a1, a3).
En orden τ6 :
[6L1 +M ]a1 −Na7 =1
14a3a5[30(1− θ(λ0
1)2)− 112L1] = f7(a1, a3, a5).
En orden τ2n :
[2nL1 +M ]a1 −N a2n+1 = f2n+1(a1, a2, a5, . . . , a2n−1)
De este procedimiento se sigue que la ecuacion (5.82) y algebra simple implican las siguientesecuaciones:
Ma21 − 2Na1 −R = 0 (5.84)
[(M + 2nL1)a1 −N ] a2n+1 = f2n+1(a1, . . . , a2n−1), n > 1, (5.85)
donde
M = 2L1 − (1− θ(λ01)
2). (5.86)
Si M 6= 0, para a1 obtenemos dos raıces
a±1 =1
M
(N ±
√N2 +MR
)(5.87)
Consecuentemente, la funcion σ(τ) tiene la representacion (5.83) unicamente bajo las condi-ciones
N2 +MR > 0, y (M + 2nL1)a±1 −N 6= 0 ∀n = 1, 2, . . . (5.88)
La primera desigualdad en la ecuacion (5.88) garantiza la existencia de las raıces y la segundade no ser valida los coeficientes ai en (5.85) se anularıan.
Sin embargo, M puede ser arbitraria (incluyendo el caso M = 0 ya que θ(λ01)
2 < 1 paraθ < 1 y θ(λ0
1)2 > 1 para θ > 1) y tenemos que investigar todas las posibles situaciones.
Sea M > 0. Entonces,
a−1 < 0, a+1 > 0 y Ma−1 < N < Ma+
1
Sea R > 0. Entonces ambas condiciones (5.88) se satisfacen ya que
(M + 2nL01)a
+1 −N > 2nL0
1a+1 > 0 y (M + 2nL0
1)a−1 −N < 2nL0
1a−1 < 0
Tesis de Maestrıa

116 5.4. Analisis del sistema dinamico basico.
Luego, si R < 0, entonces necesitamos suponer la validez de la primera condicion en (5.88).Mas aun, la segunda condicion (5.88) puede ser transformada a la siguiente forma:
N 6=√N2 +MR(1 + qn) para toda n = 1, 2, . . . , (5.89)
donde los numeros qn definidos de la siguiente manera,
qn :=M
2nL1=
1
n
(1− 1− θ(λ0
1)2
2L1
),
son positivos. Para M > 0 y R < 0 ambas raıces a±1 son positivas si y solo si N > 0, puesde lo contrario, de (5.87) N2 + MR > 0 lo cual implica que 0 < N2 + MR < N2 entonces√N2 +MR <
√N2 = N . Ası, si M > 0, R < 0 y N < 0 entonces a+
1 < 0 y a−1 < 0. Si R = 0entonces existen a+
1 > 0 si y solo si N > 0.
Considerando de la misma manera el caso M < 0 obtenemos la condicion:
E2) Sea M 6= 0. Mas aun, sean la funcion F y las velocidades Vi tales que las siguienteshipotesis se valen:
E2a) Si M > 0 entonces R > 0 o R < 0 y se satisfacen las condiciones (5.89), N > 0 y
N2 +MR > 0, (5.90)
o R = 0 y N > 0.
E2b) Si M < 0 entonces R < 0 y se satisface (5.89) o R > 0 y se satisfacen (5.89), (5.90) yN < 0 o R = 0 y N < 0 y
1− θ(λ01) 6= 2L1(1 + 2n) para toda n = 1, 2, . . . .
Observacion 5.2. Teoricamente, tambien existe un caso especifico cuando M = 0. Sin em-bargo, en este trabajo no lo consideraremos.
Calculando la coordenada W de las trayectorias en la forma similar a (5.83), esto es
W = ω1τ + ω3τ3 + · · · , (5.91)
pasamos al siguiente resultado:
Lema 5.5. Supongamos que las hipotesis A-E2 se satisfacen. Entonces, existe al menos unatrayectoria γs = (σ = σs(τ),W = Ws(τ)) del sistema (5.70), (5.72), (5.73) la cual pasa delsemiplano izquierdo (W,σ) al semiplano derecho cuando τ crece desde −τ0 hasta τ0, para τ0suficientemente pequena.
Observemos lo siguiente:
1. a−1 y a+2 significa que hay dos posibles curvas en el diagrama de flujo las cuales pueden
ser ambas positivas.
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 117
2. ωi y ai nos dan las pendientes de cada una de tales curvas, m =ωi
ai.
El siguiente paso en el analisis es la consideracion del sistema (5.70), (5.72), (5.73) paraσ → ±∞. Ya que las convoluciones se anulan cuando σ → ±∞, tenemos:
Q = 1 + (1 + θ)W
σ+O
(1
σ2
(1 +
W
σ
)), P =
1
2(1 + θ)(Q− 1)2 +O
(1
σ2
). (5.92)
Ahora, procedemos a resolver el sistema (5.70), (5.92) en sus terminos principales para |σ|grande. Resolveremos el sistema (5.70) por separacion de variables se sigue que:
De lo anterior tenemos:
dσ
dW=
2(1 + θ)[σ + (1 + θ)W ]
σ[(1 + θ)2(
Wσ
)2]
=2σ[σ + (1 + θ)W ]
(1 + θ)2W 2
=2σ2
(1 + θ)W 2+
2σ
W
Esta es una ecuacion diferencial homogenea. Ahora, haciendo el cambio de variables σ = uWse sigue que dσ = udW + Wdu dividiendo esta igualdad por dW tenemos que udW+Wdu
dW =2
(1+θ)u2 + 2u entonces udW +Wdu =
[2
(1+θ)u2+2u
]dW , ası Wdu =
(2
(1+θ)u2 + u
)dW . Luego,
du2
(1+θ)u2 + u
=dW
W,
denotemos por κ = 21+θ entonces du
au2+u= dW
W .
Ahora, integrando ∫ ∞
−∞
du
κu2 + u=
∫ ∞
−∞
dW
W.
Utilizaremos el metodo de integracion en fracciones parciales:
1
κu2 + u=
1
u(κu+ 1)=A
u+
B
κu+ 1=A(κu+ 1) +Bu
u(κu+ 1)=
(Aκ+B)u+A
κu2 + u,
entonces 1 ≡ (Aκ+B)u+A. Ası, Aκ+B ≡ 0 y A = 1 entonces B ≡ −κ.De aquı que,
∫ ∞
−∞
du
κu2 + u=
∫ ∞
−∞
(1
u− κ
κu+ 1
)du = ln(u)− κ
∫ ∞
−∞
du
κu+ 1
= ln(u)− ln(κu+ 1) = ln(u
κu+ 1),
Tesis de Maestrıa

118 5.4. Analisis del sistema dinamico basico.
donde hicimos uso del cambio de variables, x = κu+ 1.
Ahora, ln( uκu+1) = ln(W ) + ln(α), donde ln(α) es una constante, de aquı que u
κu+1 = αW .
Luego, de σ = uW tenemos u = σW . Ası,
σW
κ σW + 1
= αW, (5.93)
entonces σ = αW 2
1−ακW .
Buscamos la solucion que pase por el punto (σ0,W0); ası de (5.93) se sigue que α =σ0
W0(κσ0+W0) . Luego,
σ =αW 2
1− ακW =W 2
ρ− κW =W 2
ρ− 21+θW
=W 2
21+θ
[1+θ2 ρ−W
] =1 + θ
2
W 2
C −W , (5.94)
de aquı que σ = 1+θ2
W 2
C−W ; en estas igualdades se denotaron como ρ = 1α y por C = 1+θ
2 ρ, dedonde
C = W0
(1 +
1 + θ
2
W0
σ0
). (5.95)
Como σ es grande concluimos que 1σ es pequeno, 1
σ = 21+θ
c−WW 2 . Ası, si |σ| ≫ 1 entonces
W ≈ C. En otro caso, si W es muy grande es un caso que no nos preocupa ya que buscamosque W → 0.
De este procedimiento concluimos que la solucion del sistema (5.70), (5.92) esta dada por
las ecuaciones (5.94) y (5.95), donde W0 = W∣∣∣σ=σ0
. Por lo tanto,
W = C +O(
1
|σ|
)cuando |σ| ≫ 1.
Mas aun,
W = C − 1 + θ
2τ+O
(1
|τ |2).
La ultima formula, implica la estabilizacion de las coordenadas W de cualquier trayectoriapara τ → ±∞, si |W0| = |W (τ0)| es acotada por una constante y |σ0| = |σ(τ0)| es suficientementegrande.
De aquı se sigue que la curva γs buscada no existe, pues hemos mostrado que las hipotesisya establecidas en (5.71) no se satisfacen.
El ultimo paso del analisis del sistema (5.70), (5.72), (5.73) es la consideracion de las isocli-nas.
Recordemos que las isoclinas se obtienen haciendo Q ≡ 0 y P ≡ 0 es decir, dσdτ = 0 y dW
dτ = 0;
luego la pendiente en el plano σ−W es dWdσ = P
Q . Si P = 0 obtenemos la curva en el plano σ−Wque es atravesada por las trayectorias en forma horizontal. Si Q = 0 entonces dW
dσ =∞ ası Q es
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 119
la curva en el plano σ−W que es atravesada por las trayectorias en el sistema dinamico en formavertical. Es otras palabras, las isoclinas son curvas que son atravesadas por las trayectorias delretrato fase con una pendiente constante.
La isoclina γQ = (σ,W ), Q(σ,W ) = 0 es la curva
WQ = −F(σ + 2(b1λ2 + θb2λ2)),
la cual para |σ| suficientemente grande es la recta W∞Q = WQ = − σ
1+θ cuando |σ| → ∞. Hacemoshincapie en que la curva WQ = WQ(σ) intersecta a la trayectoria γs en el origen. De hecho, siWs denota a γs como la funcion Ws(σ), entonces de (5.80) tenemos
Ws = F0σ
L1
dσ
dτ− α
,
con α = 1 + 2(b1λ12 + θb2λ
12). Ası que
dWs
dσ= F0L1
d
dσ
(σ
dσ
dτ
)−F0α
= F0L1d
dσ
(σ(a1 + 3a3τ
2 + · · · ))−F0α
= F0L1a1σ −F0α,
pues |τ | ≪ 1 si |σ| ≪ 1.
Ahora, si |σ| ≪ 1, por el lema 5.4 tenemos que
WQ = −Fσ(1 + 2(b1λ12 + θb2λ
12)) = −Fσα.
De modo que dWs
dσ− dWQ
dσ
∣∣∣σ=0
= F0L1a1 > 0.
Para encontrar la isoclina γP = (σ,W ), P (σ,W ) = 0 necesitamos resolver primeramente laecuacion
(1− θλ21)Q
2 − 2D1Q+D2 = 0, (5.96)
donde
D1 = 1− λ1(b2 − θb1), D2 = 1− 2λ1(b22 + θb21)−
2
ν2F
(λ1 +
B∆
2β1β2
).
Denotemos por Q±(σ) a las raıces de (5.96).
Q± =D1 ±
√D2
1 − (1− θλ21)D2
(1− θλ21)
,
(5.96) tiene soluciones si y solo si el discriminante
D = D21 − (1− θλ2
1)D2
= [1− λ1(b2 − θb1)]2 − (1− θλ21)
[1− 2λ1(b
22 + θb21)−
1
Fν2
(λ1 +
B∆
2β1β2
)]
Tesis de Maestrıa

120 5.5. Consideraciones graficas
es positivo.
Entonces, obtenemos las siguientes expresiones para W±P = W±
P (σ) de la isoclina γP :
W±P = F
(LQ±(σ)− σ − 2(b1λ2 + θb2λ2)
).
Para |σ| suficientemente grande (5.96) tiene como unica raız Q± = 1, pues cuando |σ| → ±∞sabemos que λi → 0 y B∆ → 0.
Un analisis asintotico de las convoluciones implica el siguiente resultado (ver [12]):
Lema 5.6. Bajo las hipotesis A)-D)
DP → +0 cuando |σ| → ∞.
Por lo tanto, obtenemos el siguiente resultado
Corolario 5.3. La isoclina γP consiste en dos ramas W±P los cuales estan definidos al menos
para |σ| suficientemente grande y tienden a juntarse cuando |σ| → ∞. Si DP > 0 para todaσ ∈ R, entonces los brazos W±
P pasan a traves del punto (0, 0).
La figura 5.9 muestra las isoclinas que hemos calculado anteriormente para σ = 0, y N = 100las cuales obtuvimos por medio de un programa de simulacion en Maple.
γ+
P
γ−
P
γQ
2 4 6 8 10
1
-1
0 σ
W
Figura 5.9: Grafica de las isoclinas del γ±P y γQ con σ = 0,∆σ = 0.1, N = 100.
Como un resultado de este analisis obtenemos el siguiente:
Lema 5.7. Supongamos que las hipotesis A)-E2) se satisfacen. Entonces el sistema dinamico(5.70), (5.72), (5.73) tiene al menos una trayectoria γs la cual se encuentra en la franjaσ ∈ R, |W | 6 cte y pasa del semiplano (−W∞
s ,−∞) al semiplano (W∞s ,∞) a traves del punto
(0, 0).
5.5 Consideraciones graficas
Ilustraremos todo esto con el ejemplo que presentamos a continuacion.Las figuras 5.10 y 5.11 representan resultados de la simulacion numerica para la ecuacion de
Jessica Yuniver Santana Bejarano
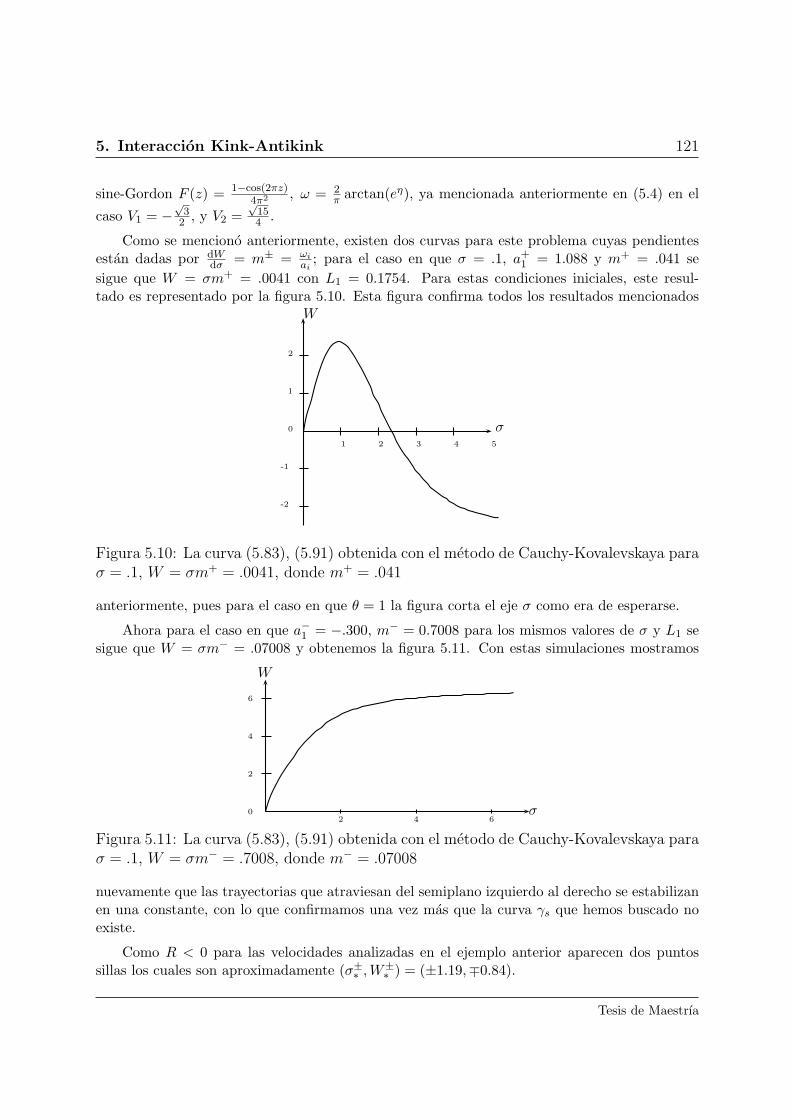
5. Interaccion Kink-Antikink 121
sine-Gordon F (z) = 1−cos(2πz)4π2 , ω = 2
π arctan(eη), ya mencionada anteriormente en (5.4) en el
caso V1 = −√
32 , y V2 =
√154 .
Como se menciono anteriormente, existen dos curvas para este problema cuyas pendientesestan dadas por dW
dσ = m± = ωi
ai; para el caso en que σ = .1, a+
1 = 1.088 y m+ = .041 se
sigue que W = σm+ = .0041 con L1 = 0.1754. Para estas condiciones iniciales, este resul-tado es representado por la figura 5.10. Esta figura confirma todos los resultados mencionados
1 2 3 4 5
-2
1
-1
0
2
σ
W
Figura 5.10: La curva (5.83), (5.91) obtenida con el metodo de Cauchy-Kovalevskaya paraσ = .1, W = σm+ = .0041, donde m+ = .041
anteriormente, pues para el caso en que θ = 1 la figura corta el eje σ como era de esperarse.
Ahora para el caso en que a−1 = −.300, m− = 0.7008 para los mismos valores de σ y L1 sesigue que W = σm− = .07008 y obtenemos la figura 5.11. Con estas simulaciones mostramos
2 4 60
2
4
6
σ
W
Figura 5.11: La curva (5.83), (5.91) obtenida con el metodo de Cauchy-Kovalevskaya paraσ = .1, W = σm− = .7008, donde m− = .07008
nuevamente que las trayectorias que atraviesan del semiplano izquierdo al derecho se estabilizanen una constante, con lo que confirmamos una vez mas que la curva γs que hemos buscado noexiste.
Como R < 0 para las velocidades analizadas en el ejemplo anterior aparecen dos puntossillas los cuales son aproximadamente (σ±∗ ,W
±∗ ) = (±1.19,∓0.84).
Tesis de Maestrıa

122 5.6. El anzatz modificado
Apliquemos ahora los resultados obtenidos para los calculos de los cambios de fases ϕi1.Pasando a ±∞ a lo largo de las trayectorias γ±s y usando las formulas (5.66), (5.67), (5.70),(5.72) obtenemos que
dϕ11
dτ= −
[G1
θG2
dϕ21
dτ
]= − σ′τ − 1
θ(σ′τ − 1)
dϕ21
dτ
= −1
θ
dϕ21
dτ= −W
∞s
σs
cuando |τ | ≫ 1.
Sea W∞s 6= 0. Como σs(τ) = τ + O(1) para tal τ , esto implica un comportamiento tipo
logarıtmico para ϕi1 cuando τ → ±∞. Obviamente, obtenemos una contradiccion con la segundahipotesis (5.16). Por otro lado, el termino principal en (5.14) de la solucion asintotica no contieneningun parametro para cambiar el valor de W∞
s .
La grafica 5.12 nos muestra el retrato fase del sistema para la ecuacion de sine-Gordon.
γQ
γ+
P
γ−
P2 4 6 8 10
1
−1
0 σ
W
Figura 5.12: Retrato fase del sistema, para la ecuacion de sine-Gordon. Las curvaspunteadas son las isoclinas y las restantes son trayectorias, dadas condiciones iniciales.Las flechas muestran la direccion del movimiento de las trayectorias.
De hecho, en el vemos que las trayectorias efectivamente cortan a las asıntotas de formavertical en el caso de γQ y de forma horizontal en el caso de γP como se menciono anteriormente.
Para el caso de la funcion F (z) = sen 4(πz), con ω = 1π arccot
(−√
2πη), encontramos que
la isoclina γP existe para valores grandes de σ, pero no existe para el caso en que σ es pequena,pues el discriminante D2
1 − (1− θλ21)
2D22 es negativo.
Por lo tanto, necesitamos cambiar el anzatz.
5.6 El anzatz modificado
En lo que sigue escribiremos τ y σ en vez de β1τ y β1σ, para simplificar las formulas.
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 123
Como escribimos en la seccion 5.1, la idea principal es la correccion del anzatz con el objetivode rotar las trayectorias fase cerca del origen de tal manera que los valores limites W∞
s sean losque se requieren. Para hacer esto agregamos al termino principal (5.14) una correccion pequena,localizada cerca del origen. La construccion de la correccion depende del signo del coeficienteM en la ecuacion (5.85). Consideraremos el caso en el que la trayectoria γs = W = Ws(σ)satisface dWs
dσ
∣∣∣σ→−∞
> 0. Entonces necesitamos rotar γs en la direccion del sentido del reloj.
El resultado principal de esta seccion es el siguiente:
Lema 5.8. Bajo las hipotesis del lema 5.7 existen correcciones del termino principal de laecuacion 5.14 tal que ambas condiciones 5.16 se satisfacen.
Demostracion: Buscamos una solucion asintotica de la siguiente forma:
u =2∑
i=1
ω
(Siβi
x− Φi(t, τ, ε)
ε
)+
Ai√a′2U
(Siµβi
x− Φi(t, τ, ε)
ε
). (5.97)
Aquı las funciones ω, Φi y la notacion τ , σ, Si son los mismos que para la ecuacion (5.14),Ai = Ai(µβiτ), donde Ai(z) ∈ C∞ son funciones que se anulan exponencialmente cuando|z| → ∞, µ es un parametro suficientemente pequeno, ε < µ < 1, y
U(η) =dmU0(η)
dηm, a′2 =
1
a2
∫ ∞
−∞(U(η))2dη,
donde m > 1 es un numero arbitrario y U0(η) ∈ C∞ es una funcion que se anula suficientementerapido cuando η →∞. Mas aun, asumiremos que U(η) es una funcion impar.
En el sentido de C la funcion U es del orden de O(1). Sin embargo, es arbitrariamentepequena en el sentido de D′:∫ ∞
−∞U
(µβ
x− Φ
ε
)ψ(x)dx =
(− ε
µβ
)m ∫ ∞
−∞
U0
(µβ
x− Φ
ε
)dmψ(x)
dxm
dx = O
((ε
µ
)m).
Analicemos que evidentemente el nuevo anzatz nos da correcciones cerca del origen para lasolucion del problema.
En el instante de tiempo inicial t = 0 obtenemos que las correcciones Φi = ϕi0(t) + εϕi1(τ),que incluimos en el anzatz viejo y que ahora nuevamente consideramos para las nuevas correc-ciones, nos da la siguiente informacion:
Ya que τ = ϕ20(t)−ϕ10(t)ε en t = 0 es τ =
x∗2−x∗
1ε ≫ 1, esto es ϕi1(τ) ≈ ϕ∞
i1 por la segundahipotesis en (5.16).
De aquı que Φi ≈ ϕi0(0) + εϕ∞i1 = x0
i .
Ası,x−x0
i
ε ≫ 1 luego µτ ≪ 1, esto es U(Siβiµx−Φi(t,τ,ε)
ε )≪ 1 y Ai ≪ 1.
Por lo tanto, hemos visto que el comportamiento de la solucion sigue siendo una onda dechoque. Las hipotesis de estas nuevas funciones que anexamos al anzatz nos garantizan que lacurva γs que buscamos tiende a cero cuando σ → ±∞, lo cual mostraremos mas adelante.
Tesis de Maestrıa

124 5.6. El anzatz modificado
Iniciemos ahora con la prueba de este lema:
Para probar el lema necesitamos construir nuevamente la solucion asintotica. Sin embargo,aparecen obstaculos tecnicos no triviales al calcular los terminos de la relacion (5.9) para el anzatz(5.97), ya que el termino principal de la expansion asintotica tiene una estructura algebraicaextremadamente grande. Debido a estas complicaciones y a lo difıcil del analisis de las ecuacionesque van surgiendo, se propone considerar terminos con precision O(ε2 + εµ). Nos limitaremosa mostrar solo los resultados principales y a comentar como estos se utilizan para alcanzar elobjetivo deseado. Los detalles se pueden consultar en [12].
Para calcular los terminos de la ecuacion (5.9) tomamos en cuenta las siguientes relaciones:
ω0iUj ≈ ω0iU′j = OD′(ε), considerando que ω0iUj ≈ ω0iU
′j y UiUj ≈ UiU
′j = OD′(εµ−1), i 6= j.
El termino (εux)2 tiene la misma forma que (5.28), mod O(εµ).
Para el termino F (u) se tiene
2F (u) = εa2
2∑
i=1
1
βiδ(x− Φi) +
1
β2B∆Aδ(x− x∗)
, B∆A =
1
µ(B + µB∆), (5.98)
donde B∆ esta definido en (5.52) y
B =2
a2
∫ ∞
−∞F
(ω
(θ
µη + σ
)− ω
(η
µ
)+
A1√a′2U(θη + µσ)− A2√
a′2U(η)
)
− F
(ω
(θ
µη + σ
)− ω
(η
µ
))dη.
Ademas
(εut)2 = (εut)
2∣∣∣Ai=0
+ a2ν2 ε
µ
2∑
i=1
βiA′2i − 2β1A
′1A
′2Λ1
(1 +O(µ))δ(x− x∗),
∂
∂t(ε2utux) = −a2ν
2 dK2
dτδ(x− x∗) + εa2ν
2 d
dτ
(2∑
i=1
βibiϕi1 +WA
)δ′(x− x∗)
+ εa2ν2
2∑
i=1
βib2i δ
′(x− Φi) +OD′(ε2),
donde
A′i =
dAi(z)
dz
∣∣∣z=
βiτ
β1
, K2A = K2 + r0,
WA = χ2K2A +W − χ2K2 +r1µ
+ r11 − r22∑
i=1
Φit,
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 125
las funciones K2, W estan definidas en, (5.58),
r0 = A′2(Λ01 +A1Λ3) +A′
1(Λ02 +A2Λ4), r11 = θ(A′2Λ01 +A′
1Λ02)− α2∑
i=1
A′i,
r1 = θ(A1A
′2Λ3 +A2A
′1Λ4
)+
1
2
2∑
i=1
AiA′i, r2 = a3θA1A2Λ2.
Aquı se esta usando la siguiente notacion
Λ1 =1
a2a′2
∫ ∞
−∞U(η)U(θη + µσ)dη, Λ3 =
1
a2a′2
∫ ∞
−∞U(η)U ′(θη + µσ)dη,
Λ4 =1
a2a′2
∫ ∞
−∞U ′(η)U(θη + µσ)dη, Λ2 =
1
a2a′2a3
∫ ∞
−∞ηU ′(η)U ′(θη + µσ)dη,
Λ01 =1
a2
√a′2a3
∫ ∞
−∞ω0(θη + σ)U(µη)dη,
Λ02 =1
a2
√a′2
∫ ∞
−∞ω0(η)U(µ(θη + σ))dη,
a3 =1
a2a′2
∫ ∞
−∞(U ′(η))2dη, α =
1
a2
√a′2
∫ ∞
−∞ηω0(η)U(µη)dη,
y Λ3, Λ4, Λ0i denotan convoluciones similares a Λ3, Λ4, Λ0i respectivamente pero con el factoradicional η en el integrando.
Sustituyendo estas asintoticas en (5.7) obtenemos las relaciones (5.62) y las siguientes ecua-ciones analogas a (5.66),(5.70):
dϕ11
dτ= −FG1A,
dϕ21
dτ= θFG2A, (5.99)
dσ
dτ= QA,
dW
dτ= PA, (5.100)
dondeG1A = G1 + θr0, G2A = G2 − r0, LA = L+ (1− θ)r2,
QA =1
LA
W + r1F + σ + 2(b1λ2 + θb2λ2)− θr0(σ + 2θλ2)− 2r2(b2 + θb1 − θr0)
,
PA =F2
(1− θλ2
1)Q2A − 2l1QA + l0
+
1
2µ
A′2
2 +1
θA′2
2 − 2A′1A
′2Λ1
− 1
ν2
(λ1 +
B∆A
2β1β2
)
y
l1 = 1− λ1(b2 − θb1) + (1− θλ1)A′2Λ01 − θ(1− θλ1)A
′1Λ02,
l0 = 1− 2λ1(θb21 + b22) + θr20 + (b2 + θb1 − θr0)(A′
2Λ01 +A′1Λ02).
Tesis de Maestrıa

126 5.6. El anzatz modificado
Elijamos el signo de los coeficientes Ai. Denotemos por z0 la primera raız positiva de la
ecuacion Λ2(z)∣∣∣µ=1
= 0 y sea τ0 tal que σ(τ0) = z0µ . Supongamos que
(1− θ)A1(τ)A2(τ)Λ2 (σ (τ)) > 0 para 0 < τ < τ0. (5.101)
Como τ = O(σ) para |σ| ≫ 1 y Ai se anula con razon exponencial, r2 = O(µ∞) para τ > τ0.
Ası, bajo la hipotesis E1), LA > 0 para σ > 0 y L′A := dLA
dσ
∣∣∣τ=σ=0
> 0
Bajo la hipotesis adicionalA′
i(0) = 0, i = 1, 2, (5.102)
existen isoclinas γQ, γP que pasan a traves del punto (0, 0).
El ultimo paso es la construccion de la trayectoria γs. Para |σ| obtenemos nuevamente laecuacion de la forma (5.84), esto es,
MAa21 −NAa1 −RA, (5.103)
donde MA y NA coinciden mod O(µ) con M y N en (5.86), (5.81) y con la siguiente RA :
RA = R− 2θ
µF0(ζA + ζB),
donde
ζA =
A1A
′′2Λ3 +A′′
1A2Λ4 +1
2
2∑
i=1
AiA′′i
∣∣∣τ=σ=0
, ζB =B
ν2β2
∣∣∣σ=0
.
La eleccion de las amplitudes Ai(τ) depende del signo del coeficiente M en (5.84). SeaM > 0, la hipotesis ζA + ζB < 0 implica la existencia de la solucion real
a1 =1õ
(√2θ
MF0|ζA + ζB|+O(
õ)
),
de (5.103). Mas aun, la condicion (5.88) se satisface para cualquier n.
Finalmente, la segunda ecuacion en (5.100) nos ayuda a definir la coordenada W de latrayectoria γs. Algebra simple implica la siguiente formula para el termino principal de laexpansion (5.91):
ω1 = − θ
µM
(MA + (1− θ(λ0
1)2))ζB + (1− θ(λ0
1)2)ζA +O(
õ).
ω1 sera negativa bajo alguna eleccion especial de ζA, ζB unicamente. Como aparece una segundahipotesis para las derivadas de segundo orden de Ai, necesitamos resumir ambas de ellas:
ζB < |ζA| < qζB, donde q =MA + 1− θ(λ0
1)2
1− θ(λ01)
2. (5.104)
Notemos que la igualdad M > 0 implica que q > 1. Ası, la validez de las condiciones (5.101),(5.102) y (5.104) se puede verificar facilmente.
Jessica Yuniver Santana Bejarano

5. Interaccion Kink-Antikink 127
Por lo tanto, la derivada
dWs
dσ
∣∣∣σ=0
=ω1
a1= − 1√
µf(A1(0), A2(0)), f > 0,
puede ser un valor arbitrario. La variacion de las amplitudes Ai(0) y del parametro µ implica la
variacion de los valores limites W∞s = lim
σ→±∞Ws(σ) del numero positivo W∞
s
∣∣∣Ai(0)=0
a cualquier
numero negativo. Esto y la estructura del retrato fase implican la existencia de tales valores deAi(0) y µ tal que W∞
s = 0.
Sea M < 0, entonces la hipotesis ζA + ζB > 0 implica la existencia de la solucion real
a1 =1õ
(√2θ
|M | F0(ζA + ζB) +O(
õ)
).
de (5.103). Por lo tanto,
ω1 = − θ
µq1((q1 − 1) ζB − ζA) +O (
õ) ,
donde
q1 =|M |
1− θ(λ01)
2> 0.
Ası, en vez de (5.104) obtenemos las siguientes hipotesis
−ζB < ζA < (q1 − 1)ζB. (5.105)
Como q1 > 0, la validez de las condiciones (5.101), (5.102) y (5.105) se cumple. En conse-cuencia, existen tales valores de Ai(0) y µ tal que W∞
s = 0.
Esto nos lleva a considerar los valores limites de ϕi1. Elijamos σ = σs(τ) y W = Ws(τ). En-
tonces∣∣W
σ
∣∣ = o(
1|τ |
)cuando τ → ±∞. Luego, sea M < 0. Entonces, integrando las ecuaciones
de la forma (5.99), obtenemos que ϕ∞i1 son acotadas por una constante para cualquier eleccion
del parametro µ ∈ [0, 1). Sea M > 0. Entonces los lados derechos de las igualdades (5.99)contienen los terminos de tipo A1(τ)A
′2(
τθ )Λ3(µσ). Sin embargo, Ai se anula cuando τ → ±∞
con razon exponencial. Por lo tanto, la integral de este termino es acotado por una constanteuniformemente en µ > 0. Esto implica la validez de la hipotesis (5.16) y completamos la pruebadel Lema5.8.
En consecuencia obtenemos nuestro resultado principal:
Teorema 5.2. Sean las hipotesis A)-E2) validas. Entonces el kink y el antikink preservan suforma despues de la interaccion mod OD′(ε2). La solucion asintotica debil del problema (5.1),(5.13) tiene la forma (5.97) con la eleccion especial de las amplitudes Ai y del parametro µ.
Tesis de Maestrıa

128 5.6. El anzatz modificado
Finalmente, deseamos presentar un resultado el cual muestra que nuestra definicion delas soluciones debiles para el problema (5.1), (5.13) es equivalente a la validez de la ley deconservacion
d
dt
∫ ∞
−∞utuxdx = 0 (5.106)
y la relacion de la energıa
2d
dt
∫ ∞
−∞xε2utuxdx+
∫ ∞
−∞
(εut)
2 + (εux)2 − 2F (u)dx = 0. (5.107)
Teorema 5.3. Sean las hipotesis del Teorema 5.2. Entonces la funcion (5.97) es la solucionasintotica mod OD′(ε2) del problema (5.1), (5.13) si y solo si las relaciones (5.106), (5.107)se satisfacen.
Demostracion: Para probar este resultado es suficiente sustituir el anzatz (5.97) en las leyesde balance (5.106) y (5.107).
Por simplicidad calcularemos el producto utux para la funcion de la forma (5.14). Integrandoesta expresion sobre x y cambiando variables β1(x− Φ1) = εη o β2(x− Φ2) = εη obtenemos laformula:
∫ ∞
−∞utuxdx = −a2
ν
ε
2∑
i=1
βi − β1λ1 (bi + ϕ′i1) = −a2
ν
ε
(K2 +
2∑
i=1
βibi
), (5.108)
donde se utiliza la notacion dada en las ecuaciones (5.23), (5.58) y (5.59). Como el lado derechoen (5.108) es una funcion de argumento τ unicamente, volvemos a calcular la derivada conrespecto del tiempo usando la formula d
dt = ε−1ν ddτ .
Ahora, es claro que la ley de conservacion (5.106) es precisamente la ecuacion (5.61).Calculos similares pero mas complicados demuestra que la relacion de la energıa (5.107) im-plica las igualdades (5.62) y (5.63) para el anzatz (5.13). Recıprocamente, reescribiendo lasecuaciones (5.61)-(5.63) en terminos de ut, ux, F (u) para u de la forma (5.14), tenemos lasrelaciones de energıa (5.106) y (5.107). Calculando los lados izquierdos de (5.106), (5.107) parael anzatz (5.97), llegamos nuevamente a las igualdades similares a (5.61)-(5.63).
Jessica Yuniver Santana Bejarano

Conclusiones
El objetivo de la primera mitad de este trabajo de tesis es el de establecer las bases necesariaspara discutir en el ultimo capıtulo una aplicacion interesante a ecuaciones diferenciales parciales,cuyas propiedades son validas en el sentido de distribuciones.
La idea de una distribucion es la de generalizar la nocion de funcion que conocemos en Rn
y discutir sus principales propiedades, pues cientıficos como Heaviside encontraron soluciones aciertos problemas utilizando δ, H(x) entre otras, las cuales solo pueden ser entendidas con grandetalle mediante la Teorıa de Distribuciones establecida por Schwartz en 1950.
Mostramos como podemos llegar a la definicion de los operadores de Distribuciones una vezque conocemos su definicion en el sentido clasico.
Estos resultados los llevamos a la practica resolviendo cierto tipo de problemas y principal-mente en el capıtulo 5 el cual es la parte central de esta tesis.
En el capıtulo 5 abordamos un problema de interaccion de Ondas donde la forma de lassoluciones de tipo kink (5.2) de la onda semilineal (5.1) es similar a una onda de choque, perotienen distintas propiedades, por lo que requieren un anzatz especial en el termino principalrelacionado con la no linealidad. Dicho anzatz esta compuesto de algunas correcciones especialescerca del origen en la suma del kink y el antikink ya que la ecuacion de sine-Gordon es massensitiva que otras y requiere de aproximar la solucion real mucho mejor que simplemente conla suma de kinks.
Si la funcion F de (5.1) satisface las condiciones A), B) existe una solucion u(x, t, ε) enla forma (5.2) y tiende a los valores lımites suficientemente rapido. Impusimos la condicion deperiodicidad D) para considerar la superposicion de las ondas con distancias grandes entre susfrentes.
Iniciamos este estudio conociendo que los kinks de la ecuacion de sine-Gordon siguen elescenario anteriormente mencionado y la pregunta inicial fue ¿Es la ecuacion de sine-Gordon launica de la clase (5.1) para la cual tal escenario es valido? en caso de no ser la unica nuestroobjetivo fue encontrar condiciones en F bajo las cuales los kinks y los antikinks de (5.1) colapsensiguiendo el escenario de sine-Gordon.
Nos encontramos con problemas como el siguiente: No podemos usar los metodos tradi-
129

130 Conclusiones
cionales para describir el escenario de colision de ondas ya que la ecuacion de sine-Gordon es launica de la clase (5.1) que puede ser integrada exactamente. Por lo que construimos una solucionasintotica con un parametro pequeno ε. Ademas las asintoticas tradicionales no responden estapregunta por existir problemas aun no resueltos. Por tales dificultades utilizamos el metodoasintotico debil, cuya ventaja principal es: reducir el problema de describir la interaccion deondas no lineales a un analisis cualitativo de alguna ecuacion diferencial ordinaria.
Por la propiedad que tienen las soluciones de este tipo de problemas es natural usar D′
para una definicion de una solucion asintotica como en (5.6) pero esta definicion presenta unainconsistencia, pues analizamos que el lado izquierdo de (5.6) es O(ε2) mientras que el ladoderecho es 0.
Por tal razon utilizamos funciones de prueba que son rapidamente variantes donde la solucionvarıa rapidamente, obteniendo ası una definicion de solucion asintotica debil mod OD′(ε2)en (5.7) la cual no presenta irregularidades, ademas nos garantiza la existencia de la primeracorreccion y nos ayuda a encontrar una ecuacion para el movimiento distorcionado de frentes dekinks.
Presentamos el termino principal de la solucion asintotica debil para el problema (5.1),(5.13) en la ecuacion (5.14) en el cual intervienen algunas correcciones las cuales nos garantizanque los kinks no pierden su forma durante la interaccion.
Para la construccion de la solucion asintotica debil, calculamos asintoticas debiles con dis-crepancia OD′(ε2) para las expresiones que aparecen en el lado izquierdo de (5.7), para lo cualhacemos uso de los conceptos establecidos en los capıtulos anteriores sobre teorıa de distribu-ciones tales como la definicion de distribucion δ, funciones de Schwartz, convoluciones, diferen-ciacion; tambien utilizamos el Lema 5.1, la formula de Taylor de primer orden y algunos cambiosde variables para llevar las asintoticas a su expresion mas simplificada en el sentido debil; obte-niendo con ello las expresiones presentadas en (5.28), (5.55)-(5.59); las cuales satisfacen lascondiciones A)-D) y (5.16).
Calculando las asintoticas debiles para los terminos del lado izquierdo de (5.7) obtuvimos al-gunas convoluciones que presentamos en (5.23), (5.51), (5.52) las cuales existen bajo las hipotesisA)-D) y cumplen las propiedades de ser funciones de Schwartz.
Utilizando las formulas (5.28) y (5.55)-(5.59) el lado izquierdo de (5.9) es una combinacionlineal de δ(x−x∗), δ′(x−x∗) y δ′(x−Φi) las cuales son linealmente independientes entonces suscoeficientes son cero, obteniendo con esto un sistema de ecuaciones que presentamos en (5.61)-(5.63), el cual por medio de algunas manipulaciones algebraicas lo llevamos al sistema autonomoen (5.70) con condicion inicial (5.71).
Para un analisis del sistema dinamico utilizamos las propiedades de las convoluciones pre-sentadas en el Lema 5.4 obteniendo con ello que nuestro sistema (5.70) es invariante con respectoal cambio de variables presentado en el Corolario 5.1 y bajo las hipotesis del Lema 5.2 mostramosque el sistema (5.70), (5.72), (5.73) tiene una singularidad en la recta (0,W ) en el plano (σ,W )de tipo 1
σ , razon por la cual elegimos la hipotesis E1).
Esta singularidad nos llevo a investigar cuando una trayectoria puede pasar del semi-planoizquierdo al derecho y como todo el eje W es una singularidad del sistema esto unicamente puede
Jessica Yuniver Santana Bejarano

Conclusiones 131
pasar a traves del punto (0, 0), por lo que consideramos una vecindad pequena del origen decoordenadas.
De esta manera para |σ| 6 1 por el Lema 5.4 el sistema esta dado por (5.79) el cual mediantealgunos calculos tecnicos lo llevamos a la expresion dada en (5.82).
Aplicando el metodo de Cauchy-Kovalevskaya, tomando en cuenta que σ = σ(τ) es impar,despues de simples calculos algebraicos obtenemos las ecuaciones (5.84), (5.85) para M,N yR. Encontramos que σ tiene la representacion (5.83) unicamente bajo las condiciones (5.88) lascuales garantizan la existencia de las raıces en (5.87) y la no anulacion de los coeficientes ai
en (5.85). Ya que M puede ser arbitraria estudiamos las posibles situaciones y obtenemos lacondicion E2). Calculando las W coordenadas de las trayectorias en la forma similar a (5.83),encontramos que existe al menos una trayectoria γs = (σ = σs(τ),W = Ws(τ)) del sistema(5.70), (5.72), (5.73) la cual pasa del semiplano izquierdo al derecho cuando τ crece desde −τ0hasta τ0, para τ0 suficientemente pequena.
Por (5.84) observamos que hay dos posibles curvas en el diagrama de flujo las cuales puedenser ambas positivas y que las pendientes estan dadas por m = ωi
ai.
El siguiente paso fue la consideracion del sistema (5.70), (5.72), (5.73) para σ → ±∞.Resolviendo el sistema (5.70), (5.92) en sus terminos principales para |σ| grande y buscando quela solucion pase por el punto (σ0,W0) tenemos la expresion (5.94) para σ y (5.95) para C quenos dan la solucion del sistema. Concluyendo que
W = C − 1 + θ
2τ+O
(1
|τ |2)
lo que implica la estabilizacion de las coordenadas W de cualquier trayectoria para τ → ±∞,si |W0| = |W (τ0)| es acotada por una constante y |σ0| = |σ(τ0)| es suficientemente grande. Deaquı se sigue que la curva γs buscada no existe, pues las hipotesis establecidas en (5.71) no sesatisfacen.
Como ultimo paso del analisis del sistema se considero a las isoclinas. La isoclina γQ esWQ = −F
(σ + 2(b1λ2 + θb2λ2)
). Para γP = (σ,W ), P (σ,W ) = 0 resolvimos (5.96) cuyas
raıces estan dadas por Q±(σ). La ecuacion (5.90) tiene soluciones si y solo si el discriminanteen Q±(σ) es positivo, obteniendo ası las expresiones
W±P = F
(LQ±(σ)− σ − 2(b1λ2 + θb2λ2)
).
Mediante un analisis asintotico de las convoluciones obtuvimos el Lema 5.6 el cual implicaque la isoclina γP consiste en dos brazos W±
P los cuales estan definidos al menos para |σ|suficientemente grande y tienden a juntarse cuando |σ| → ∞. Si el discriminante es no negativopara toda σ ∈ R, entonces los brazos W±
P pasan a traves del punto (0, 0).
De esta manera bajo las hipotesis A)-E2) el sistema dinamico (5.70), (5.72), (5.73) tieneal menos una trayectoria γs la cual se encuentra en la franja σ ∈ R, |W | 6 cte y pasa delsemiplano (−W∞
s ,−∞) al semiplano (W∞s ,∞) a traves del punto (0, 0).
En la seccion 5.5 presentamos los resultados graficamente mediante programas realizadosen Maple para los resultados anteriormente descritos.
Tesis de Maestrıa

132 Conclusiones
En la ultima seccion presentamos el anzatz modificado (5.97), la idea es la correccion delanzatz con el objetivo de rotar las trayectorias fase cerca del origen de tal manera que los valoreslımites W∞
s sean los que se requieren. Para hacer esto agregamos al termino principal (5.14)una correccion pequena localizada cerca del origen.
El resultado referente a esta correccion lo presentamos en el Lema 5.8 cuya demostracionse basa nuevamente en el calculo para las asintoticas debiles, en donde encontramos obstaculostecnicos no triviales ya que el termino principal de la expresion tiene una estructura algebraicaextremadamente grande. Obteniendo despues de esto, los resultados analogos a los ya discutidospara el primer anzatz.
Finalmente, ya que los terminos Ai que aparecen en el nuevo anzatz (5.97) se anulan cuandoτ → ±∞ con razon exponencial. La integral de los terminos de la forma A1(τ)A
′2
(τθ
)Λ3(µσ) es
acotado por una constante uniformemente en µ > 0. Lo que implica la validez de (5.16).
Obteniendo ası el resultado principal siguiente bajo las hipotesis A)-E2): el kink y elantikink preservan su forma despues de la interaccion mod OD′(ε2). La solucion asintoticadebil del problema (5.1), (5.13) tiene la forma (5.97) con la eleccion especial de las amplitudesAi y del parametro µ.
Por ultimo, presentamos un resultado el cual muestra que nuestra definicion de las solucionesdebiles para el problema (5.1), (5.13) es equivalente a la validez de la ley de conservacion y larelacion de la energıa.
Jessica Yuniver Santana Bejarano
Bibliografıa
[1] G. Bachman, L. Narici, Functional Analysis, Courier Dover Publications, 2000.
[2] M. Balanzat Lecciones Sobre Teorıa de Distribuciones, Impreso en Portugal por la Ti-pografıa Matematica, Lda., Lisboa, Noviembre de 1966.
[3] J. Barros-Neto An Introduction to the Theory of Distributions, Robert E. Krieger PublishingCompany Malabar, Florida, 1981.
[4] V. G. Danilov, G. A. Omel’yanov, V. M. Shelkovich, Weak Asymptotics Method and Inter-action of Nonlinear Waves, Asymptotic methods for wave and quantum problems, (M. V.Karasev ed.), AMS Trans., Ser 2, v. 208, AMS, Providence, R. I., 2003, 33-164.
[5] W. F. Donoghue, Jr. Distributions and Fourier Transforms, Academic Press, USA, 1969.
[6] R. Flores E., M. G. Garcıa, G. A. Omel’yanov Differential Equations of MathematicalPhysics, Theory and Numerical Simulations, Editorial UniSon, Mexico, 2004.
[7] R. Flores E., G. A. Omel’yanov, Asymptotic Behavior for the Centered Rarefaction Appear-ance Problem, Electron. J. Diff. Eqns., 2005, 148, 1-25.
[8] R. Flores E., G. A. Omel’yanov, Weak Asymptotics for the Problem of Interaction of TwoShock Waves, Nonlinear Phenomena in Complex Systems, 2005, 8, No. 4, 331-341.
[9] G. B. Folland Real Analysis Modern Techniques and their Applications, 2nd. edition, WileyInterscience, USA, 1999.
[10] G. Friedlander, M. Joshi, Introduction to The Theory of Distributions, 2nd. edition, Cam-bridge University Press, 1998.
[11] M. G. Garcıa, R. Flores E., G. A. Omel’yanov, Interaction of Shock Waves in Gas Dyna-mics. Uniform in Time Asymptotics, International Journal of Math. and MathematicalSci., 2005, 2005:19, 3111-3126.
[12] M. G. Garcıa A., G. A. Omel’yanov, Kink-Antikink Interaction for Semilinear Wave Equa-tions with a Small Parameter, Electronic Journal of Differential Equations, Vol. 2009(2009),No. 45, pp. 1-26.
133

134 Indice
[13] L. R. Gouyon, Integracion y Distribuciones, Reverte, Espana, 1979.
[14] R. Haberman Ecuaciones en Derivadas Parciales con Series de Fourier y Problemas deContorno, 3ra. edicion, Prentice Hall, Espana, 2003.
[15] R. P. Kanwal, Generalized Functions; Theory and Applications, 3rd. edition, Birkhauser,USA, 2004.
[16] D. A. Kulagin, G. A. Omel’yanov, Asymptotics of Kink-Kink Interaction for Equations ofsine-Gordon Type, Mat. Zametki 75 (2004), no. 3-4, 563-567.
[17] D. A. Kulagin, G. A. Omel’yanov, Interaction of Kinks for Semilinear Wave Equations witha Small Parameter, Nonlinear Analysis, 2006, 65, No. 2, 347-378.
[18] J. Marsden, M. Hoffman, Analisis Basico de Variable Compleja, Editorial Trillas, 1996.
[19] M. Renardy, R. C. Rogers An Introduction to Partial Differential Equations, 2nd. edition,Ed. Springer, USA, 2004.
[20] G. B. Whitham, Linear and Nonlinear Waves, Pure and Applied Mathematics, John Wiley& Sons, New York, 1974.
Jessica Yuniver Santana Bejarano

Indice
Antikink vi, 83, 84, 128, 130, 133Anzatz vi, 89, 90, 123, 124, 129, 130, 133
modificado 123viejo 124
Aproximaciones asintoticas 85Asintoticas 89, 126, 131
debiles 90, 105, 106, 131, 133tradicionales 131
Asociatividaddel producto directo
de distribuciones 71,de convolucion de distribuciones 75
BBreather 84
CConmutatividad
de la convolucion de distribuciones 75de los productos directos 71, 75
Continuidad 58de la de delta de dirac 25de una distribucion 20, 50, 58, 59, 69, 70de los funcionales 71
lineales 19de P 1
x 28de la transformada de Fourier 65de la convolucion
de distribuciones 76Convergencia 18, 24
clasica 49de distribuciones 29, 35, 48de las funciones de prueba 48
debil 49, 50, 61en D′ 61en S
′ 61distribucional v, 49en D 58en DR 19en S 55, 57, 58en S
′ 61de series de distribuciones 49uniforme 18, 56, 58
Convolucion 78, 105de funciones 74
localmente integrables 77de distribuciones 53, 74, 75, 76
temperadas o de lento crecimiento 77
DDefinicion debil 86Delta de Dirac v, 1, 2, 4, 7, 9, 15, 31, 38Derivada 9, 128, 129
acotada 5, 16, 40, 62clasica 36, 40continua 5, 17del producto de una distribucion
y una funcion continua 37de la delta de Dirac 9de la distribucion de Heaviside 38de la funcion x+ 38de la funcion |x| 39de la transformada de Fourier 63
de una funcion de prueba 35, 61de una distribucion 35
135

136 Indice
regular 42
distribucional 85
generalizada 35
Diferenciacion 12, 50, 69, 131
de distribuciones 35, 37
del producto directo de distribuciones 71
de la convolucion de distribuciones 76
Distribucion 1, 10, 19, 20, 21, 27, 44, 45, 53,58, 130, 131
continua 20, 66
de lento crecimiento 57
delta de Dirac 25, 31, 32, 42, 72
de Heaviside 25
de masa unitaria 31
de orden finito 42
|x| 46
P 1x 28
homogenea 32
impar 32
par 32
regular 20, 21, 25, 27, 30, 35, 42, 69, 74
singular 20, 30
temperada v, 57, 65, 66
Distribuciones v, 48, 53, 61, 76
temperadas 57, 58, 65, 67, 68
en S′ 59
en D′ 61
en Dm+n 71
en D′m+n 71
de Heisenberg 28
de lento crecimiento 77
de soporte compacto 55
regulares 19
singulares 28
EEcuaciones semilineales vi
Encolado de trozos 42
Escenario de sine-Gordon v, 84, 86, 130
Espacio 15
C∞ 15
D 15, 55
D′ 21, 84
D0 15
Dm 15
D de funciones de prueba 19, 21
Rn 45
S 55
de Schwartz 55, 104
de funciones de prueba 19
con soporte compacto 68
dual 21, 48, 58
Expansion
asintotica 124
escalar 31
FFluxones vi, 81
Frente 83
del kink o del antikink 82,89
de kinks 85, 130
de onda v
no perturbados 87
Funcion
de prueba 18, 19, 30, 48, 53, 69, 70, 71,73, 76, 85, 86
de rapido decaimiento 61
de rapido decaimiento 56
de Schwartz 95, 103
de Sobolev iv
entera 54
generalizada 10, 15, 35, 44, 71, 79, 80
impar 91, 123
impulso 1
infinitamente diferenciable 15, 33
integrable 13, 27
lentamente creciente 94
localmente integrable 13, 42, 58, 69
monotonamente decreciente 47
no integrable 14
ordinaria 7
par 91
suave 46, 84, 85
Funcional 27, 46, 47, 71, 72,
lineal 19, 25, 28, 58
continuo 19, 26, 57, 58, 69, 72
I
Jessica Yuniver Santana Bejarano

Indice 137
Interaccion 133de dos kinks 86de las ondas de choque 87de Ondas 130kink-antikink v, 83, 87
Para Ecuaciones de Onda Semilinealescon un Parametro Pequeno 82
no lineal vInverse Scattering Transform 83Isoclina 119, 120, 122, 131
KKink vi, 81, 82, 83, 85, 127, 129, 132,
LLaurent Schwartz v, 1, 2, 42, 55Lema C∞ de Urysohn 23, 26Ley de conservacion 132Leyes de balance 128
MMetodo
asintotico debil v, 84, 130de Cauchy-Kovalevskaya 114, 121, 131de integracion en fracciones parciales 118
Medida 13, 26concentrada en 26de Dirac 39de masa 40
Movimiento 89de las trayectorias 122distorsionado de frentes de kinks 130
OOliver Heaviside 1, 2, 130Onda
de choque 123, 129suave vno lineal visemilineal 129
ondas v, viOndas
de luz vide sonido vi
lineales vino interactivas 88no lineales viino interactuantes 90solitarias vi, 89sonoras viviajeras 90
Operador 12, 33, 78continuo 76de traslacion 31diferencial 76, 78
lineal 78ordinario 12parcial 12, 13
Operadoresalgebraicos 30de distribuciones 29lineales v, 66
Orden de una distribucion 42
PParticion de la unidad 22Pequenez en el sentido debil 85Principio de superposicion viProducto directo v, 68, 69, 71, 72, 73, 75
de distribuciones 53, 69temperadas 72, 73, 77,
de la distribucion delta 72
RRapidez 89, 104
exponencial de anulacion 105Regla de Stokes 80Regularizacion v, 27Regularizaciones 67Retrato fase 88, 93, 119, 127
SSeminormas 56Sergei Sobolev iv, 1Serie de distribuciones 49Solitones v, viSolucion 82, 84, 85, 129, 131
asintotica 84, 122, 124, 130
Tesis de Maestrıa

138 Indice
debil 85, 89, 127, 132autosimilar 81debil 84, vide ondas solitaria 85de tipo kink vde una ecuacion diferencial parcial 114del sistema 118fundamental 78kink exacta 85real 126, 129
Soporte v, 14, 17, 18, 19, 27, 42, 43, 45, 71,75, 76
acotado 54, 55, 70compacto 14, 15, 26, 36, 55, 68, 70, 75singular 46de la delta de Dirac 45de la funcion de prueba 28de las distribuciones 76de una distribucion 29, 35, 42, 44, 75de una funcion 14singular v, 46
de una distribucion 29, 42nula 18, 58, 70
Sucesiones delta v, 4
TTeorema
de Bolzano-Weierstrass 70de cambio de variables 34de convergencia dominada
de Lebesgue 26de Fubini 37, 53de Hahn-Banach 26del encolado de trozos 42, 43, 44del valor medio 28del valor medio par integrales 5de integracion por partes 37
Transformada de Fourier v, 53, 54, 55, 62,63, 64, 66, 67, 73
de convoluciones 77, 80de Distribuciones Temperadas 65de funciones de prueba 61de la convolucion 77de la delta Dirac 67
de una distribucion 65de una distribucion temperada 63inversa 62, 66, 77
Transformada inversa 61, 62Traslacion 32, 63, 72
de la transformada de Fourier 63de una distribucion 32por y ∈ R
n 31
VValor principal de Cauchy 28
Jessica Yuniver Santana Bejarano

Indice 139
Tesis de Maestrıa