UNIVERSIDAD NACIONA DE PIURA ÁREA ACADEMICA DE LA …
142
UNIVERSIDAD NACIONA DE PIURA ÁREA ACADEMICA DE LA FACULTAD DE CIENCIAS ESCUELA PROFESIONAL DE INGENIERIA ELECTRONICA Y TELECOMUNICACIONES PROYECTO DE INVESTIGACIÓN PARA OPTAR EL TÍTULO DE INGENIERO ELECTRONIC° Y TELECOMUNICACIONES "DISEÑO Y SIMULACION DE UN MODULO PARA EL APRENDIZAJE DE SISTEMAS ELECTRONEUMATICOV PERSONAL INVESTIGADOR: BACH. SALDARRIAGA CASTILLO DAVID ALEJANDRO ASESOR: ING. FRANKLIN BARRA ZAPATA PIURA - PERÚ 2015 1 Página
Transcript of UNIVERSIDAD NACIONA DE PIURA ÁREA ACADEMICA DE LA …
UNIVERSIDAD NACIONA DE PIURA
ÁREA ACADEMICA DE LA FACULTAD DE CIENCIAS
ESCUELA PROFESIONAL DE INGENIERIA ELECTRONICA Y
TELECOMUNICACIONES
PROYECTO DE INVESTIGACIÓN PARA OPTAR EL TÍTULO DE
INGENIERO ELECTRONIC° Y TELECOMUNICACIONES
"DISEÑO Y SIMULACION DE UN MODULO PARA EL APRENDIZAJE
DE SISTEMAS ELECTRONEUMATICOV
PERSONAL INVESTIGADOR:
BACH. SALDARRIAGA CASTILLO DAVID ALEJANDRO
ASESOR:
ING. FRANKLIN BARRA ZAPATA
PIURA - PERÚ
2015
1 Página

775 31M--
"DISEÑO Y SIMUIACION DE UN MODULO PARA EL APRENDIZAJE
DE SISTEMAS ELECTRONEUMATICOS"
Br. Saldarriaga Castillo David Alejandro
Ejecutor de Tesis
Ing. ¡din Barra Zapata
Asesor
2IPágina
070„ ADQUISICaus
Los miembros del jurado designados para evaluar la tesis presentada
el Bachiller Saldarriaga Castillo David Alejandro, titulada:
"DISEÑO Y SIMULACION DE UN MODULO PARA EL APRENDIZAJE
DE SISTEMAS ELECTRONEUMATICOS"
Considera que la misma cumple con los requisitos exigidos para alcanzar
al Título de Ingeniero Electrónico y Telecomunicaciones.
Ing. Jacinto Sandoval Juan Manuel
Presidente
Ing. Panduro Alvarado Miguel Angel
Secretario
Ing. Avila Regalado Eduardo Omar
Vocal
3 Página

DEDICATORIA
A Dios quién supo guiarme por el buen camino, darme fuerzas para seguir adelante y no desmayar
en los problemas que se presentaban, enseñándome a encarar las adversidades sin perder nunca
la dignidad ni desfallecer en el intento.
A mi familia pues por ustedes soy quien soy.
A mis padres, en los que siempre encontré apoyo, confianza y la fuerza para seguir adelante,
porque su sabiduría, comprensión y sacrificio son la razón de que yo pueda lograr mis sueños.
A mis hermanos por ser mi ejemplo, por motivarme a alcanzar mis metas y ser los compañeros de
mi felicidad.
A mi familia entera porque todos ellos siempre me han apoyado en mi vida estudiantil e influyeron
en mí la madurez para lograr todos los objetivos en la vida, siendo este también el logro de ellos,
ahora me toca regresar un poco de todo lo que me han otorgado.
_ 4 !Página

AGRADECIMIENTOS
Este proyecto no se podía llevar a cabo sin la colaboración de muchas personas. A todos; mi más
sincero agradecimiento.
A los ingenieros:
ING. Franklin Barra Zapata
ING. Eduardo Omar Ávila regalado
Por toda la ayuda brindada en esta investigación, ya que con sus conocimientos, me supieron guiar
para alcanzar el objetivo propuesto.
A mi asesor de proyecto ING. Franklin Barra Zapata, por su disponibilidad para llevar el proyecto y
por su apoyo en cada momento.
5 ¡Página

RESUMEN
La electroneumática es muy utilizada dentro de la industria para el desarrollo de distintas
actividades secuenciales y poco a poco se va incrementando su uso debido a las ventajas que
aporta.
Este trabajo se orienta a buscar una solución en cuanto a diseñar y simular un módulo de prácticas
electroneumáticas para la Escuela de Ingeniería Electrónica y Telecomunicaciones que instruya al
estudiante a la solución de problemas de diseño de circuitos electroneumáticos con ayuda de un
simulador.
Para la solución de las problemáticas que se presentan en el uso de la electroneumática se deben
emplear de forma correcta alguna de las metodologías prácticas y uso de software de simulación
para el diseño de las secuencias, según las características del proceso electroneumático.
6 ¡Página

INTRODUCCIÓN
El siguiente trabajo tiene como objetivo realizar un módulo de prácticas de laboratorio para
sistemas Electroneumáticos desde las más fundamentales hasta prácticas complejas que
garantizan su ejecución y aprendizaje.
Se describirán elementos neumáticos y electroneumáticos, usados para la automatización de
procesos de industriales, y también se describirá dispositivos eléctricos y electrónicos,
utilizados para el control o mando de actuadores neumáticos.
Se enseñarán los métodos para el conocimiento del control mediante electroneumática, la
importancia que tiene la implementación y uso de los mecanismos neumáticos en la
industria, así como sus ventajas y formas de control de estos mecanismos.
La elaboración del módulo electroneumático se asocia a la utilización de un software simulador
como Automation Studio y FluidSIM que nos permite comprobar el diseño y analizar el
funcionamiento de los sistemas.
Un tema de vital importancia dentro de este trabajo es el conocimiento del controlador
lógico programable, por lo que se tocan las ventajas del uso de los PLC dentro del control
electroneumático, así como la conclusión de los mejores métodos de control electroneumático.
Se desarrolla también la integración del software CODESYS y FluidSIM con la finalidad de crear
una herramienta óptima en la solución, desarrollo y diseño de procesos electroneumáticos,
controlados mediante métodos que incluyen el uso de PLC, para verificar su buen funcionamiento.
_ 7 Página

ÍNDICE
DEDICATORIA
AGRADECIMIENTOS
RESUMEN
INTRODUCCIÓN
CAPÍTULO 1
PLANTEAMIENTO METODOLÓGICO
1.1 Descripción de la realidad problemática 17
1.2 Delimitaciones y definición del problema 18
1.2.1 Delimitación del problema 18
1.2.2 Definición del Problema 18
1.2.3 Formulación del problema 19
1.4 Objetivos de la Investigación 19
1.4.1 Objetivo General 19
1.4.2 Objetivos específicos. 19
1.5 Hipótesis General 19
CAPITULO II
MARCO TEÓRICO
2.1 Antecedentes 20
2.2 Marco Histórico 21
2.3 Marco Conceptual 21
2.3.1 Automatización 21
81 Página

2.3.2 Neumática 22
2.3.3 Electroneumática 22
2.4 Sistemas electroneumáticos 22
2.4.1 Aplicaciones 22
2.4.2 Ventajas de los sistemas electroneumáticos 23
2.4.3 Desventajas de los sistemas electroneumáticos 23
2.5 Componentes de un sistema electroneumático 24
2.5.1 Cilindros neumáticos 25
2.5.1.1 Cilindro de simple efecto. 25
2.5.1.2 Cilindro de doble efecto 26
2.5.2 Electroválvulas 27
2.5.2.1 Válvulas distribuidoras 27
2.5.2.2 Válvulas solenoides. 28
2.5.3 Detectores de señal 29
2.5.3.1 Captadores neumáticos de accionamiento mecánico 30
2.5.3.1.1 Válvula de rodillo 30
2.5.3.1.2 Válvula de accionamiento directo 30
2.5.3.2 Captadores eléctricos 31
2.5.3.2.1 Contacto normalmente abierto 31
2.5.3.2.1 Contacto normalmente cerrado 32
2.5.3.3 Detectores de proximidad 32
2.5.3.3.1 Detectores magnéticos 32
2.5.3.3.2 Detectores inductivos 33
2.5.3.3.3 Detectores ópticos 34
9 Página
2.5.4 Relevador 35
2.5.4 Controlador Lógico programable (PLC) 37
2.5.4.1 Estructura de un PLC 37
2.5.4.2 Ventajas 38
2.5.4.3 Desventajas 38
2.5.4.4 Lenguaje de contactos (Ladder) 38
2.5.5 Componentes auxiliares de circuitos electroneumáticos 40
2.5.5.1 Válvula reguladora de caudal 40
2.5.5.2 Unidad de mantenimiento (FRL) 41
2.5.5.3 Silenciadores 44
2.5.5.4 Manómetro 44
2.6 Circuitos electroneumáticos 45
2.6.1 Métodos de diseño 45
2.6.1.1 Diagrama de funcionamiento 45
2.6.1.1.1 Diagrama espacio-fase 45
2.6.1.1.2 Diagrama de señales 47
2.6.1.2 Método intuitivo 50
2.6.1.3 Método cascada 52
2.6.1.3.1 Diagrama de contactos 55
2.6.1.3.2 Método cascada electroneumática 57
2.6.1.4 Método paso a paso 59
2.6.1.5 Método secuencial 63
2.6.1.6 Diagramas ladder 67
2.7 Software de simulación 72
2.7.1 FluidSIM 4.5 Neumática 72
101Página

2.7.1.1 Comunicación OPC con otras aplicaciones 74
2.7.1.1.1 Descripción OPC 75
2.7.2 Automation Studio 5.0 77
2.7.3 CODESYS V2.3 80
2.7.3.1 Creación del proyecto 80
2.7.3.2 Reconocimiento del entorno 81
2.7.3.3 Configuración de comunicación OPC 82
CAPITULO III
DISEÑO DEL MÓDULO ELECTRONEUMÁTICO
3.1 Estudio de Factibilidad 87
3.1.1 Factibilidad Técnica 87
3.1.1.1 Tecnología y solución propuesta 87
3.1.1.2 Disponibilidad de la tecnología 88
3.1.1.3 Conocimientos técnicos 88
3.1.2 Factibilidad Operativa 88
3.1.3 Factibilidad Económica 88
3.2 Diseño del módulo 89
3.2.1 Desarrollo de prácticas de laboratorio 89
3.2.1.1 Laboratorio I 89
3.2.1.1.1 Título 89
3.2.1.1.2 Objetivos 89
3.2.1.1.3 Materiales 89
3.2.1.1.4 Procedimiento 90
3.2.1.1.5 Descripción 90
11.1Página
3.2.1.1.6 Diagrama de señales y estado-fase 91
3.2.1.1.7 Esquema del circuito neumático 91
3.2.1.1.8 Simulación en FluidSIM 92
3.2.1.1.9 Conclusiones 92
3.2.1.1.10 Cuestionario 92
3.2.1.2 Laboratorio II 93
3.2.1.2.1 Título 93
3.2.1.2.2 Objetivos 93
3.2.1.2.3 Materiales 93
3.2.1.2.4 Procedimiento 93
3.2.1.2.5 Descripción 94
3.2.1.2.6 Esquema del circuito neumático 95
3.2.1.2.7 Circuito de control 95
3.2.1.2.8 Simulación en FluidSIM 96
3.2.1.2.9 Conclusiones 96
3.2.1.2.10 Cuestionario 96
3.2.1.3 Laboratorio III 97
3.2.1.3.1 Título 97
3.2.1.3.2 Objetivos 97
3.2.1.3.3 Materiales 97
3.2.1.3.4 Procedimiento 97
3.2.1.3.5 Descripción 97
3.2.1.3.6 Esquema del circuito neumático 98
3.2.1.3.7 Circuito de control 99
3.2.1.3.8 Simulación en Automation Studio 99
3.2.1.3.9 Conclusiones 100
12 1Página
3.2.1.3.10 Cuestionario 100
3.2.1.4 Laboratorio IV 101
3.2.1.4.1 Título 101
3.2.1.4.2 Objetivos 101
3.2.1.4.3 Materiales 101
3.2.1.4.4 Procedimiento 101
3.2.1.4.5 Descripción 101
3.2.1.4.6 Esquema del circuito neumático 102
3.2.1.4.7 Circuito de control 103
3.2.1.4.8 Simulación en FluidSIM 103
3.2.1.4.9 Conclusiones 104
3.2.1.4.10 Cuestionario 104
3.2.1.5 Laboratorio V 105
3.2.1.5.1 Título 105
3.2.1.5.2 Objetivos 105
3.2.1.5.3 Materiales 105
3.2.1.5.4 Procedimiento 105
3.2.1.5.5 Descripción 105
3.2.1.5.6 Esquema del circuito neumático 106
3.2.1.5.7 Circuito de control 107
3.2.1.5.8 Simulación en Automation Studio 107
3.2.15.9 Conclusiones 108
3.2.1.5.10 Cuestionario 108
13 1Página

3.2.1.6 Laboratorio VI 109
3.2.1.6.1 Título 109
3.2.1.6.2 Objetivos 109
3.2.1.6.3 Materiales 109
3.2.1.6.4 Procedimiento 109
3.2.1.6.5 Descripción 109
3.2.1.6.6 Esquema del circuito neumático 110
3.2.1.6.7 Diagrama de control 111
3.2.1.6.8 Simulación en Automation Studio 112
3.2.1.6.9 Conclusiones 113
3.2.1.6.10 Cuestionario 113
3.2.1.7 Laboratorio VII 114
3.2.1.7.1 Título 114
3.2.1.7.2 Objetivos 114
3.2.1.7.3 Materiales 114
3.2.1.7.4 Procedimiento 114
3.2.1.7.5 Descripción 115
3.2.1.7.6 Esquema del circuito neumático 116
3.2.1.7.7 Diagrama de control 116
3.2.1.7.8 Simulación en Automation Studio 117
3.2.1.7.9 Conclusiones 117
3.2.1.7.10 Cuestionario 117
3.2.1.8 Laboratorio VIII 118
3.2.1.8.1 Título. 118
3.2.1.8.2 Objetivos 118
3.2.1.8.3 Materiales 118
14IPágina

3.2.1.8.4 Procedimiento 118
3.2.1.8.5 Descripción 119
3.2.1.8.6 Esquema del circuito neumático 121
3.2.1.8.7 Diagrama y programación de control 121
3.2.1.8.8 Simulación en FluidSIM y CODESYS 123
3.2.1.8.9 Conclusiones 125
3.2.1.8.10 Cuestionario 125
3.2.1.9 Laboratorio IX 126
3.2.1.9.1 Título 126
3.2.1.9.2 Objetivos 126
3.2.1.9.3 Materiales 126
3.2.1.9.4 Procedimiento 126
3.2.1.9.5 Descripción 127
3.2.1.9.6 Esquema del circuito neumático 128
3.2.1.9.7 Diagrama y programación de control 129
3.2.1.9.8 Simulación en FluidSIM y CODESYS 131
3.2.1.9.9 Conclusiones 133
3.2.1.9.10 Cuestionario 133
CAPITULO IV
ANÁLISIS E INTERPRETACIÓN DE RESULTADOS
4.1 Pruebas y resultados de las simulaciones 134
4.1.1 Fortalezas 135
4.1.2 Oportunidades 135
4.1.3 Debilidades 135
15 ¡Página

CAPITULO V
CONCLUSIONES Y RECOMENDACIONES
5.1 Conclusiones 136
5.2 Recomendaciones 137
BIBUOGRAFIA
APEN DICES
161Página
CAPÍTULO I
1.- PLANTEAMIENTO METODOLOGICO
1.1 Descripción de la realidad problemática.
La electroneumática es una de las técnicas de automatización que en la actualidad viene
cobrando vital importancia en la optimización de los procesos a nivel industrial. Su
evolución fue a partir de la neumática, disciplina bastante antigua que revolucionó la
aplicación de los servomecanismos para el accionamiento de sistemas de producción
industrial. Con el avance de las técnicas de electricidad y la electrónica se produjo la fusión
de métodos y dando así el inicio de los sistemas electroneumáticos en la industria, los cuales
resultaban más compactos y óptimos a diferencia de los sistemas puramente neumáticos.
La electroneumática se utiliza con éxito en muchas áreas de la automatización industrial .La
producción, montaje y embalaje de todo el mundo son impulsados por los sistemas de
control electroneumático.
Los estudiantes de la Escuela de Ingeniería Electrónica y Telecomunicaciones deben tener
conocimiento del control de circuitos electroneumáticos pues esta área de la electrónica es
de mucha importancia en el sector industrial debido a que realiza la aplicación de
automatización de procesos.
El uso de diversos sistemas secuenciales en la industria exige que los profesionales tengan
conocimiento y aplicación de la metodología Electroneumática debido a las ventajas que
aporta al control y resolución de estas secuencias y aún mayor empleando controladores
lógicos programables. La Electroneumática se extiende a diferentes aplicaciones en
procesos industriales y sistemas de automatización, es por esto que los estudiantes deben
fortalecer el conocimiento al respecto de sistemas electroneumáticos.
Los profesionales egresados de la Escuela de Ingeniería Electrónica y Telecomunicaciones
deben desarrollar habilidades técnicas en el área de control eléctrico para su desarrollo
personal y el de la Escuela, pero sólo llegan a conocer la parte teórica de los sistemas
secuenciales usados en los procesos industriales. El proceso de enseñanza debe
complementarse para que los alumnos no presenten falencias al momento en que se
17 1Página

encuentren ante el ambiente industrial real y tengan mayor oportunidad en el ámbito
laboral. El complemento de las clases teóricas son las prácticas de laboratorio, el diseño del
módulo de prácticas Electroneumáticas permitirá reforzar los conocimientos de los alumnos
de la Escuela en dos ramas de la automatización como la neumática y la electricidad y así
garantizar el buen desempeño de los alumnos en el campo laboral y la industria moderna.
El diseño del presente trabajo tiene como objetivo realizar un módulo en el que se
simularán sistemas electroneumáticos con diferentes software como Automation Studio,
FluidSim entre otras herramientas utilizadas en la automatización de procesos industriales.
1.2 Delimitación y definición del problema.
1.2.1 Delimitación del problema.
En los procesos industriales es indispensable la automatización, los componentes
electroneumáticos se emplean para ejecutar movimientos como transporte, etiquetado,
llenado de recipientes, es por eso que la electroneumática constituye una herramienta muy
importante dentro del control automático.
La Escuela de Ingeniería Electrónica y Telecomunicaciones debe reconocer la importancia de
esta rama de la automatización y tener como objetivo fortalecer las habilidades del estudiante
de la Escuela acorde a las necesidades actuales y avances de la tecnología.
La necesidad actual que presenta el sector industrial espera profesionales capacitados que se
desempeñen en la instalación y mantenimiento de sistemas de control neumático y
electroneumático, pero el material didáctico existente en la Escuela es escaso respecto a la
resolución de sistemas secuenciales electroneumáticos.
En la Escuela actualmente no se cuenta con cursos o prácticas de laboratorio de sistemas
electroneumáticos con una metodología que garantice la ejecución y el aprendizaje de los
sistemas ya mencionados.
Este trabajo surge ante la falta de un módulo didáctico en la Escuela que imparta la aplicación
teórica práctica de automatización el cual permitirá simular secuencias de procesos con el fin
de elevar la competencia en la carrera de Ingeniería Electrónica y Telecomunicaciones
beneficiándose así los estudiantes de la Escuela.
1.2.2 Definición del problema.
18 1 P gina

La electroneumática comprende un amplio campo de utilización dentro de la industria para el
desarrollo de diferentes actividades secuenciales, y se ha incrementado su uso debido a las
ventajas que aporta. La realidad problemática descrita en este trabajo se orienta a buscar una
solución en cuanto a diseñar y simular un módulo de prácticas electroneumáticas para la Escuela
de Ingeniería Electrónica y Telecomunicaciones que instruya al estudiante a la solución de
problemas de diseño de circuitos electroneumáticos con ayuda de un simulador.
1.2.3 Formulación del problema.
Definido el problema en cuanto a la necesidad de aprender sistemas electroneumáticos, este
trabajo propone la siguiente pregunta de investigación:
¿Es posible diseñar y simular un módulo de sistemas electroneumáticos para la Escuela de
Ingeniería Electrónica y Telecomunicaciones?
1.4 Objetivos de la investigación.
1.4.1 Objetivo general.
Diseñar y simular un módulo para la Escuela de Ingeniería Electrónica y Telecomunicaciones de la
Universidad Nacional de Piura para el aprendizaje de sistemas electroneumáticos.
1.4.2 Objetivos específicos.
Seleccionar los elementos necesarios que permitan desarrollar las prácticas de
electroneumática.
Realizar una descripción de las prácticas que aporten al fortalecimiento de
conocimientos de la Escuela de Ingeniería Electrónica y Telecomunicaciones.
Investigar el uso de software que permitan realizar la simulación de las prácticas del
módulo.
1.5 Hipótesis general.
Usando las tecnologías existentes, si es posible diseñar y simular un módulo de aprendizaje de
sistemas electroneumáticos que ayude a la enseñanza de automatización de los alumnos de
Ingeniería Electrónica y Telecomunicaciones de la Universidad Nacional de Piura.
191Página
CAPÍTULO II
2.- MARCO TEÓRICO
2.1 Antecedentes.
Se ha revisado y estudiado diferentes libros y tesis que preceden al tema de investigación y son
nuestro punto de referencia:
En el libro técnico de FESTO "Fundamentos de la técnica de automatización" se señalan
diferentes temas de importancia como: características de los actuadores (cilindros
neumáticos), funcionamiento de unidades de control (PLC), el uso de relés en la
electroneumática; que permiten de manera didáctica al lector el aprendizaje de procesos
electroneumáticos.
Los señores Vicente Lladonosa Giró y José Manuel Gea Puertas, en su libro titulado
"Circuitos Básicos de Ciclos Neumáticos y Electroneumáticos" exponen apartados de cómo
diseñar los diagramas de funcionamiento de los circuitos e identificar elementos que los
componen, de la forma de realizar esquemas electroneumáticos según métodos como
cascada, y cuya finalidad es que el lector asimile y entienda el funcionamiento de los
sistemas electroneumáticos.
Según Antonio Creus Solé, en su libro titulado "NEUMÁTICA E HIDRÁULICA", indica lo
siguiente:
En este libro se presenta la metodología utilizada para el diseño y control de circuitos
electroneumáticos que permite conocer y entender el funcionamiento de los dispositivos
electroneumáticos, su control, sus limitaciones y la forma de realizar un correcto diseño
de las instalaciones. A partir de estos conocimientos se pueden desarrollar las
simulaciones de estos sistemas y su control desde un PLC (Controlador Lógico
Programable) con la ventaja que ofrece este control como ser modificable.
En la tesis "Manual consultivo de control neumático y electroneumático utilizando el
software FESTO fluidSIM" se realiza el diseño y comprobación del funcionamiento de
circuitos electroneumáticos mediante el software fluidSIM con el fin de que el usuario sea
capaz de resolver problemas de control de secuencias y compruebe de manera práctica la
aplicación de los métodos.
20 1Página

2.2 Marco histórico.
A través de los años, se ha incrementado el número de especialistas, técnicos e ingenieros
enfrentados con problemas en los sistemas neumáticos en las ramas industriales. En el siglo XIX
se comenzó a utilizar el aire comprimido en la industria de forma sistemática. A lo largo
de la historia, fueron diseñados dispositivos neumáticos. Por ejemplo, fue inventado un fusil
neumático, un freno de aire comprimido, un tranvía de accionamiento neumático, entre otros.
Algunos de estos aún siguen en uso en una versión mejorada.
En 1868 George Westinghouse fabricó un freno de aire que revolucionó la seguridad en el
transporte ferroviario. Es a partir de 1950 que la neumática se desarrolla ampliamente en la
industria con el desarrollo paralelo de los sensores. Desde finales del siglo XX se ha implantado en
fábricas, diferentes mecanismos para llegar a la automatización y la implantación de sistemas
neumáticos que aporten en el control de procesos.
La lógica neumática y la unidad de control neumático de los sistemas de automatización de antaño
han dado paso a la electrónica que, mediante los autómatas programables, ha abierto diferentes
posibilidades y ha permitido la unión de ambas tecnologías, neumática y electrónica. Pero esta
unión también presenta dificultades y obliga a sus aplicadores a un mejor conocimiento de ambas.
La técnica electroneumática constituye hoy en día el complemento ideal de la mecánica en
cualquier proceso de producción moderno. Esta rama de la automatización se ha convertido con el
paso del tiempo en una necesidad cotidiana, que no solo afecta ya a las grandes empresas, sino a
cualquier industria independiente de su capacidad de producción.
Actualmente con el desarrollo de software especializados que contribuyen al aprendizaje de
circuitos neumáticos y electroneumáticos se puede realizar la comprobación de diseño y
simulación haciendo uso de estas herramientas de trabajo.
2.3 Marco conceptual.
2.3.1 Automatización.
La automatización abarca diversas ciencias de ingeniería, consiste en que las tareas de un proceso
industrial se realicen de manera automática por maquinas u otros elementos tecnológicos en lugar
de realizarlas manualmente.
Para configurar procesos automáticos modernos se necesitan tres componentes:
Sensores para captar los estados del sistema
Actuadores para emitir los comandos de control
21 1Página
Unidades de control para la ejecución del programa y para tomar decisiones
2.3.2 Neumática.
La palabra neumática proviene del griego "pneuma" que significa aire o respiración. Se entiende
por neumática a cualquier sistema técnico que funcione con aire comprimido. Transforma la
energía del aire para generar fuerzas elevadas y para ejecutar trabajos mecánicos, es decir, para
ejecutar movimientos.
Las instalaciones neumáticas modernas, utilizadas para la automatización, incluyen varios
subsistemas que tienen las siguientes finalidades:
Generar y alimentar aire comprimido (compresor, filtro)
Distribuir aire comprimido (tubos rígidos y flexibles)
Controlar el aire comprimido (válvulas de presión, válvulas de vías)
Ejecutar tareas con aire comprimido (cilindros)
2.3.3 Electroneumática.
Los sistemas neumáticos se complementan con los eléctricos y electrónicos lo que les permite
obtener un alto grado de sofisticación y flexibilidad. Utilizan válvulas solenoide, señales de
realimentación de interruptores magnéticos, sensores e interruptores eléctricos de final de
carrera. El PLC (controlador lógico programable) les permite programar la lógica de
funcionamiento de un cilindro o de un conjunto de cilindros realizando una tarea específica.
Entonces la electroneumática es la ciencia que combina los automatismos eléctricos y sus
elementos con la forma de generar movimiento con actuadores neumáticos.
2.4 Sistemas Electroneumáticos.
Un sistema electroneumático típico está compuesto por un circuito neumático más un circuito
eléctrico. La parte de fuerza del sistema es realizada por cilindros de accionamiento neumático los
cuales junto con válvulas de pilotaje eléctrico (electroválvulas 5/2) monoestables o biestables, y
detectores de finales de carrera magnéticos o de palanca y rodillo proporcionan los movimientos y
la lógica electrónica o eléctrica necesarios para el control.
2.4.1 Aplicaciones.
Con la electroneumática se puede lograr hoy día cualquier nivel de automatización. En la industria
moderna la electroneumática ocupa un lugar destacado debido a la sencillez de su aplicación, y
continúa desarrollándose y ampliando su campo de aplicación. A continuación se muestran de
forma resumida algunas aplicaciones más representativas:
22 1 Página
Movimientos de aproximación rápido y avance lento, típicos de las fresadoras y
rectificadoras.
Automatización de procesos de producción.
Son utilizados comúnmente en aplicaciones donde la fuerza de empuje y desplazamiento
son elevados.
Máquinas de embotellado y envasado.
Máquina conformadora de chapa de aluminio.
Curvadora de tubos de cobre.
Estaciones de separación de piezas.
Etiquetado y sellado de botellas.
Embaladoras.
Plegadoras de cajas de cartón.
Manipuladores de cargas.
Máquinas de taladro múltiple.
Empaquetado, transporte y dispositivos de selección.
Mecanismos de frenado.
Accionamiento de puertas correderas.
Extracción de aire y elevación por vacío de placas.
2.4.2 Ventajas de los sistemas electroneumáticos.
El uso de sistemas electrónicos y neumáticos proporciona una serie de ventajas, basadas en los
diferentes procesos que se benefician de sus amplias funciones lógicas y aritméticas. Los
siguientes argumentos recomiendan el uso de este tipo de sistemas:
Los sistemas electroneumáticos permiten un alto grado de sofisticación y de
flexibilidad.
El accionamiento eléctrico es el adecuado cuando las distancias de transmisión son muy
largas y los tiempos de conexión son cortos en comparación con sistemas neumáticos.
Permiten una fácil automatización de procesos industriales complejos.
La alta velocidad de transmisión de señales y procesamiento conduce a la significativa
mejora de la productividad del sistema de automatización.
Permite mandos de trabajo más rápidos.
2.4.3 Desventajas de los sistemas electroneumáticos.
El control lógico neumático debería tenerse siempre en cuenta cuando el control del controlador
lógico programable no sea necesario, ya que es mucho más barato y sencillo de instalar que un
circuito de relé eléctrico. Las principales desventajas de la electroneumática son:
No recomendable para ambientes inflamables o en condiciones de alta humedad.
Una limitación importante es el ruido; existen lugares donde su uso es limitado debido al
ruido que producen los escapes de aire de los diferentes componentes.
23 ¡Página
Depósito de aire a presión
Unidad de mantenimiento
Cilindro
Manómetro
=RIN b
Válvula de apertura
(17-1
Boton_de_arranque E-
Válvula de distribución
Elecirovalvula
Electrovalvula KI
352.96 Psi
sensores
a0 al
Válvula reguladora de caudal
Boton_de_paro E--
Filtro de aire Válvula comprimido reguladora y separador de presión de aaua
Lubricador
Motor
Las sobrecargas constituyen situaciones peligrosas o que dañen los equipos de forma
permanente.
No se pueden manejar grandes fuerzas.
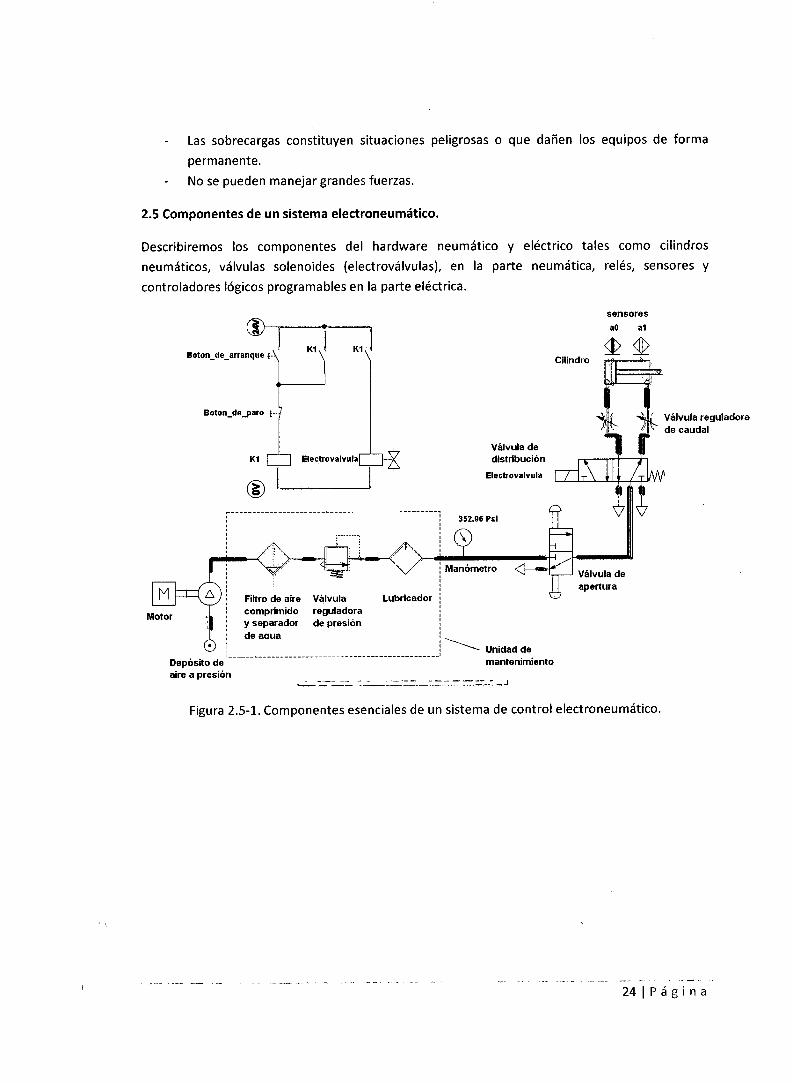
2.5 Componentes de un sistema electroneumático.
Describiremos los componentes del hardware neumático y eléctrico tales como cilindros
neumáticos, válvulas solenoides (electroválvulas), en la parte neumática, relés, sensores y
controladores lógicos programables en la parte eléctrica.
Figura 2.5-1. Componentes esenciales de un sistema de control electroneumático.
24 1 Página

<B> <I> Cilindro —
Boton_de_arranque
Válvula reguladora de caudal
Boton_de_paro
Depósito de aire a presión
Unidad de mantenimiento
'
sensores
aO al
Válvula de distribución
Electrovalvula
KI
74.59 Psi
Manómetro
Filtro de aire Válvula Lubricador comprimido reguladora y separador de presión
de anua
Motor
Electrovalvu
Válvula de apertura
Figura 2.5-2. Simulación de los componentes en Automation Studio.
2.5.1 Cilindros neumáticos.
Los actuadores neumáticos convierten la energía del aire comprimido en trabajo mecánico
generando un movimiento lineal, consisten en un cilindro cerrado con un pistón en su interior que
desliza y que transmite su movimiento al exterior mediante un vástago. El control de la posición
del cilindro se puede llevar a cabo mediante la colocación adecuada de interruptores eléctricos y/o
neumáticos de accionamiento mecánico. La configuración apropiada y el montaje correcto son
indispensables para el buen funcionamiento del sistema.
Figura 2.5.1-1. Partes de un cilindro.
fprImurniniusióer
Fuente: httyrssiiiterordbetseapumanctiynaussisaarnlitesno~/~Ettibaweititaaufital/
2.5.1.1 Cilindro de simple efecto.
Estos cilindros sólo pueden ejecutar un trabajo en un solo sentido, pues el aire se alimenta en un
solo lado, aplicando aire comprimido, el vástago del cilindro de simple efecto avanza hacia su
posición final delantera. Para que el cilindro retroceda, debe descargarse primero el aire
251Página
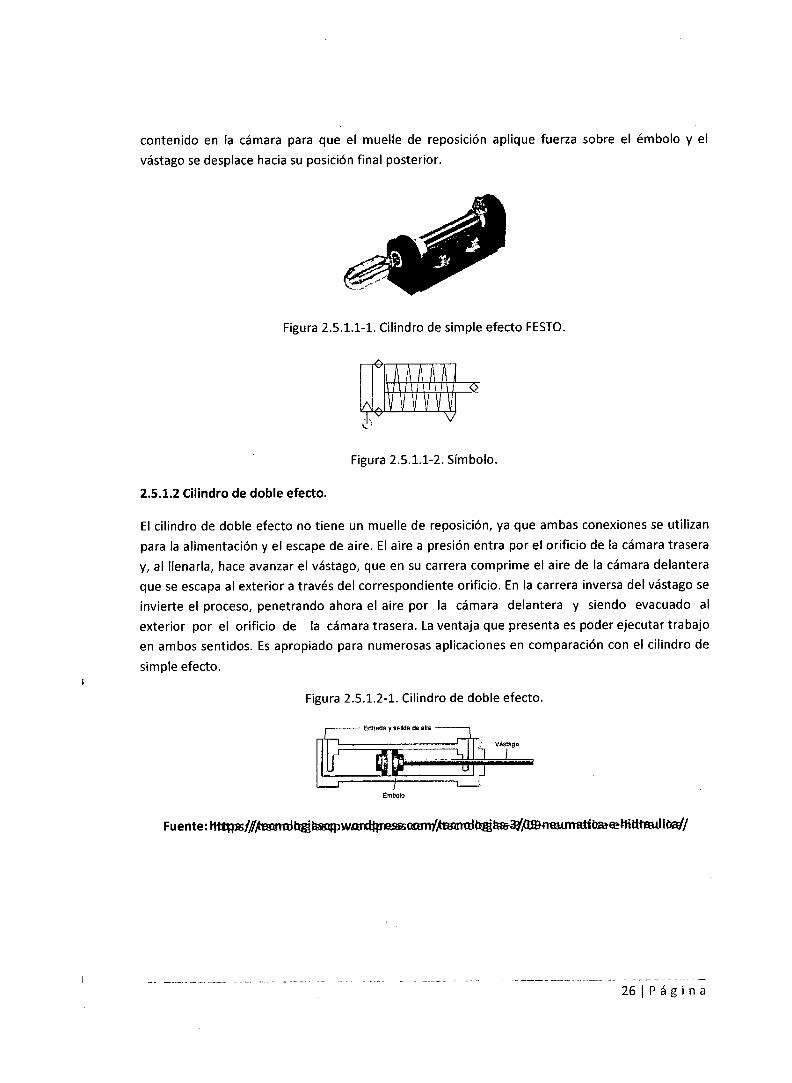
contenido en la cámara para que el muelle de reposición aplique fuerza sobre el émbolo y el
vástago se desplace hacia su posición final posterior.
Figura 2.5.1.1-1. Cilindro de simple efecto FESTO.
Figura 2.5.1.1-2. Símbolo.
2.5.1.2 Cilindro de doble efecto.
El cilindro de doble efecto no tiene un muelle de reposición, ya que ambas conexiones se utilizan
para la alimentación y el escape de aire. El aire a presión entra por el orificio de la cámara trasera
y, al llenarla, hace avanzar el vástago, que en su carrera comprime el aire de la cámara delantera
que se escapa al exterior a través del correspondiente orificio. En la carrera inversa del vástago se
invierte el proceso, penetrando ahora el aire por la cámara delantera y siendo evacuado al
exterior por el orificio de la cámara trasera. La ventaja que presenta es poder ejecutar trabajo
en ambos sentidos. Es apropiado para numerosas aplicaciones en comparación con el cilindro de
simple efecto.
Figura 2.5.1.2-1. Cilindro de doble efecto.
Entrada y salida de aire
1_ Vástago
Era /boto
Fuente: littypdhiaorraibc~c~tioarnjAtundtzgjins-Willnesantatitereglititradlirtil
26 1Página

sensores
ce al
Válvula reguladora de caudal
Figura 2.5.1.2-2. Simulación y animación de cilindro en Automation Studio.
2.5.2 Electroválvulas
Para regular el arranque, parada y el sentido así como la presión o el caudal del aire de los
cilindros neumáticos, existen varios sistemas de accionamiento de las válvulas: manual, eléctrico,
o neumático.
Los sistemas más utilizados son las válvulas distribuidoras, las válvulas antiretorno o de bloqueo,
las válvulas reguladoras de presión y las reguladoras de flujo o de velocidad. Poseen una variedad
de posiciones generalmente encontramos 2/2, 2/3, 4/2, 5/2, 4/3 y 5/3, donde el primer número es
el de vías (entradas, salidas y descargas) y el segundo el de posiciones.
2.5.2.1 Válvulas distribuidoras
Las válvulas distribuidoras dirigen el aire comprimido hacía varias vías en el arranque, la parada y
el cambio del sentido del movimiento del pistón dentro del cilindro. Se denomina vía a
cada uno de los orificios a través de los cuales puede circular el aire en su proceso de trabajo.
En la simbología de estas válvulas DIN-ISO 1219 (Internacional Standard Organization) y
CETOP (Comité Europeo de Transmisiones Oleohidráulicas y Neumáticas), se utiliza la siguiente
nomenclatura:
Figura 2.5.2.1-1. Simbología de válvulas distribuidoras.
1SO 1219 Alfabética
CETOP
Numérica Función
P 1 Conexión del aire comprimido (alimentación)
A, 13, C 4, 6 Tuberlas o vías de trabajo con letras mayúsculas
R, S, T 5, 7 Orificios de purga o escape
X, Y, Z 12,14, 16 Tuberías de control, pilotaje o accionamiento
L 9 [F—ug a
Fuente: Neumática e Hidráulica — Creus
Para representar los distribuidores se utilizan símbolos que indican la función de la válvula. Las
válvulas son representadas por cuadros. La cantidad de cuadros colocados verticalmente indica la
cantidad de posiciones del distribuidor. El funcionamiento está representado en el interior del
27 1Página

cuadro. Las líneas esquematizan las canalizaciones internas. La flecha indica el sentido de
circulación del fluido. Las posiciones de cierre se representan por líneas transversales.
4(A) 2(B)
MA 111T4
5(R) 3(S) 1(P)
Y
Figura 2.5.2.1-2. Electroválvula 5/2 (NC).
2.5.2.2 Válvulas solenoides.
Dentro del sistema neumático la válvula solenoide es la unión entre el control
electrónico/eléctrico y la parte neumática que realiza el trabajo.
El accionamiento eléctrico se realiza por medio de bobinas de solenoide que en el caso de máxima
seguridad están siempre alimentadas, para que ante un fallo en la alimentación eléctrica, vayan
a la posición de seguridad. De hecho las válvulas de solenoide son válvulas distribuidoras 5/2
(5 vías, 2 posiciones).
Las electroválvulas de un solo solenoide al ser desexcitadas tienen el retorno del émbolo por
muelle y se llaman monoestables, mientras que las electroválvulas de doble solenoide permiten
que la válvula vaya de una posición a la otra mediante una señal eléctrica de impulso a la
bobina opuesta (sistema biestable de doble pilotaje). De este modo permanecen en la posición
deseada sin que sea necesario que la bobina esté excitada de forma permanente (el émbolo se
queda inmóvil una vez desaparecida la señal de mando — función de memoria).
La válvula solenoide más corriente es la solenoide piloto (figura 2.5.2.2-1). Es una válvula 3/2 con
pilotaje eléctrico y retorno por muelle.
Figura 2.5.2.2-1. Válvula solenoide piloto.
Fuente: Control electroneumático y electrónico — John Hyde
28 1 Página

La figura 2.5.2.2-2 muestra una válvula biestable la cual posee dos bobinas para colocar la válvula
en cada una de las posiciones que tiene.
Figura 2.5.2.2-2. Electroválvula 5/2 FESTO.
Para el control de una electroválvula mediante un autómata programable ocurre lo siguiente, al
activar una salida del autómata, se activa una bobina de la válvula, de forma que ésta se posiciona
para que permita la circulación de aire al actuador neumático, como se muestra en la siguiente
figura.
Figura 2.5.2.2-3. Funcionamiento electroválvula 5/2.
Fuente: http://www.festo.com/cms/es-co_co/17046_17081.htm
2.5.3 Detectores de señal.
Los detectores o captadores de señal son dispositivos encargados de captar información en un
determinado momento, y transmitir ésta al equipo neumático para que se produzca el
movimiento o fase siguiente. Ayudan al control de las fases de un proceso automático, detectando
la posición del vástago de los cilindros.
Permiten detectar la presencia de un objeto, son accionados por los propios mecanismos y estarán
montados en lugares estratégicos cuidadosamente situados.
Existen los siguientes tipos: captadores de señal neumáticos, captadores eléctricos y detectores de
proximidad.
29(Página

2.5.3.1 Captadores neumáticos de accionamiento mecánico.
Son de reducido tamaño y se encargan de gobernar las válvulas distribuidoras de mando de los
cilindros. Como ya se mencionó deben ubicarse en lugares determinados pues son accionados
mecánicamente. Esta ubicación debe considerarse para que en caso de fallo el cilindro no arrastre
al detector y lo deteriore. Las formas de detección son las siguientes:
2.5.3.1.1 Válvula de rodillo.
Si el cilindro continúa su marcha, la ruleta desciende y se activa, y el vástago pasa sin que la ruleta
sufra ningún daño como se ve a continuación.
Figura 2.5.3.1-1. Accionamiento por rodillo.
Fuente: Itrittttml/Attaaset fie3tolawrin//eatOes e%//alltraa//affaiz e$IMZif/55/NWABIII PtIliFF
2.5.3.1.2 Válvula de accionamiento directo.
El vástago del cilindro debe llegar a su tope accionando la válvula y sin dañarla. La siguiente figura
muestra esta acción.
Figura 2.5.3.1-2. Accionamiento directo.
Fuente: tittaliiMiv"ff3~as:tm~ esIROB/BIAXM»
Normalmente son válvulas de dos posiciones y tres vías, los tipos más frecuentes de
accionamiento se muestran en la siguiente figura.
30 ¡Página

(a)
(b)
(e)
Figura 2.5.3.1-3. Tipos de accionamiento.
El accionamiento de la figura 2.5.3.1-3(a) es directo, el accionamiento por ruleta figura 2.5.3.1-3(b)
se activa mediante una pequeña rampa ubicada en el vástago del cilindro y es activada en los dos
sentidos de la marcha del vástago (extensión y retracción). En el accionamiento de la ruleta
abatible figura 2.5.3.1-3(c) también es mediante la rampa, pero en un solo sentido; en el otro pasa
libre y no se produce señal neumática.
2.5.3.2 Captadores eléctricos.
Los interruptores eléctricos o finales de carrera son elementos que, al igual que las válvulas
neumáticas anteriores, se encargan de enviar una señal a la válvula distribuidora cuando de una
forma mecánica han sido accionadas.
Para permitir o interrumpir el flujo de corriente en un circuito eléctrico se utilizan interruptores
tipo pulsador. Los pulsadores mantienen la posición de conmutación únicamente mientras se
mantienen pulsados. Se clasifican los interruptores tipo pulsador por su estado de conmutación
normal, es decir, cuando no están accionados.
2.5.3.2.1 Contacto normalmente abierto.
El circuito de corriente está interrumpido mientras el interruptor se encuentra en su posición
normal. Accionando el interruptor, se cierra el circuito eléctrico y se alimenta; soltándolo, el
interruptor tipo pulsador recupera su posición normal por acción de un muelle, por lo que se
interrumpe nuevamente el circuito eléctrico.
Figura 2.5.3.2-1. Contacto normalmente abierto.
31.1Página

2.5.3.2.1 Contacto normalmente cerrado.
En el caso de un contacto normalmente cerrado, el circuito de corriente está cerrado por efecto
de la fuerza del muelle mientras el interruptor se encuentra en su posición normal. Al accionar el
pulsador, se interrumpe el circuito de corriente.
Figura 2.5.3.2-2. Contacto normalmente cerrado.
2.5.3.3 Detectores de proximidad.
Los detectores de posición conmutan sin establecer contacto y, por lo tanto, sin que sea necesaria
la presencia de una fuerza mecánica externa. Por ello tienen una larga duración y son muy fiables.
Se puede distinguir entre los siguientes tipos:
2.5.3.3.1 Detectores magnéticos.
Los contactos Reed son detectores de posición de accionamiento magnético. Estos detectores
tienen dos lengüetas de contacto que se encuentran en un tubo de vidrio lleno de gas inerte. Por
efecto de un imán se cierra el contacto entre las dos lengüetas, de modo que puede fluir corriente
eléctrica.
Los contactos Reed tienen una gran duración y su tiempo de respuesta es muy corto, pero no
deben utilizarse en zonas expuestas a campos magnéticos fuertes. Se usan en cilindros
magnéticos, los cuales consta de un aro de material magnético dispuesto alrededor de la
circunferencia del émbolo.
Figura 3.5.3.3.1-1. Contacto Reed.
Fuente: hittiailiMvandksIttocesti~postc~ktviniliksillS7Miásvni essmlff
32 1Página
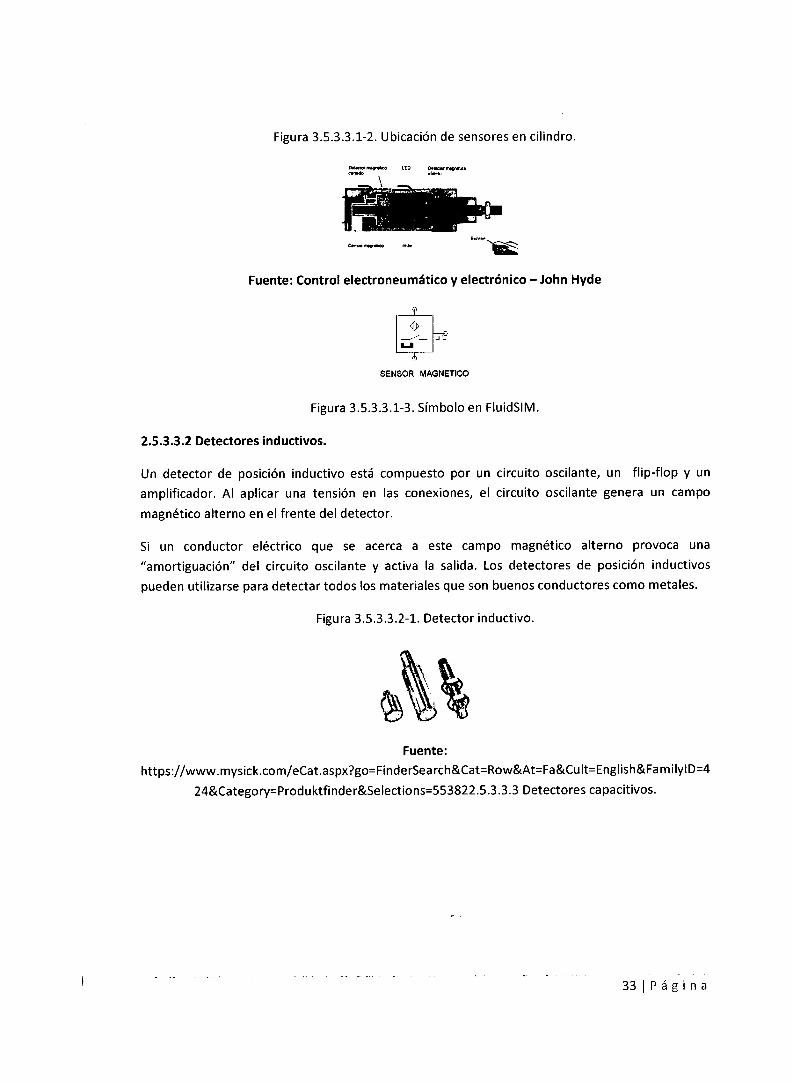
Figura 3.5.3.3.1-2. Ubicación de sensores en cilindro.
Cae,* mor~o
Fuente: Control electroneumático y electrónico — John Hyde
SENSOR MAGNETICO
Figura 3.5.3.3.1-3. Símbolo en FluidSIM.
2.5.3.3.2 Detectores inductivos.
Un detector de posición inductivo está compuesto por un circuito oscilante, un flip-flop y un
amplificador. Al aplicar una tensión en las conexiones, el circuito oscilante genera un campo
magnético alterno en el frente del detector.
Si un conductor eléctrico que se acerca a este campo magnético alterno provoca una
"amortiguación" del circuito oscilante y activa la salida. Los detectores de posición inductivos
pueden utilizarse para detectar todos los materiales que son buenos conductores como metales.
Figura 3.5.3.3.2-1. Detector inductivo.
Fuente:
https://www.mysick.com/eCat.aspx?go=FinderSearch&Cat=Row&At=Fa&Cult=English&Fa milyID=4
24&Category=Produktfinder&Selections=553822.5.3.3.3 Detectores capacitivos.
33 1Página

2.5.3.3.3 Detectores ópticos.
Es un dispositivo eléctrico que responde a los cambios de intensidad de la luz (visible o no visible)
que incide sobre el mismo. A estos detectores se los individualiza con distintos nombres según sea
la naturaleza del tipo de sensado. Los detectores ópticos tienen un emisor y un receptor. Puede
diferenciarse entre tres tipos de detectores ópticos:
Barrera de luz unidireccional.
Barrera de luz de reflexión.
Detector por reflexión.
SENSOR OPTIGO
Figura 2.5.3.3.3-1. Símbolo en FluidSIM.
Barrera de luz unidireccional.
La barrera de luz unidireccional tiene un emisor y un receptor separados en el espacio.
Estos componentes están montados de tal manera que el haz de luz emitido por el emisor
se proyecta directamente sobre el receptor. Si un objeto, una pieza o, también, una
persona, se interpone entre el emisor y el receptor, se interrumpe el haz de luz y se
genera una señal que provoca una operación de conmutación (ON/OFF) en la salida.
Figura 2.5.3.3.3-2. Barrera de luz unidireccional funcionamiento.
Fuente:
http://www.festo.com/net/SupportPortal/Files/53454/Sensoren_Broschuere_es_bV08_M
Figura 2.5.3.3.3-3. Barrera de luz unidireccional de horquilla.
Barrera de luz de reflexión.
En las barreras de luz de reflexión, el emisor y el receptor se encuentran uno junto al otro,
montados en el mismo cuerpo. El reflector se encarga de reenviar el haz de luz
34 !Página

proveniente del emisor hacia el receptor. El montaje se realiza de tal manera que el haz
de luz emitido por el emisor se refleja casi totalmente hacia el receptor. Si un objeto, una
pieza o, también, una persona, se interpone entre el emisor y el reflector, se interrumpe el
haz de luz y se genera una señal que provoca una operación de conmutación (ON/OFF) en
la salida.
Figura 2.5.3.3.3-4. Barrera de luz de reflexión funcionamiento. Effillot rnvisol
!tea". Relleclor
Fuente: fundamentos de la técnica de automatización FESTO.
c) Detector por reflexión.
El emisor y el receptor del detector por reflexión están montados uno junto al otro en un
mismo cuerpo. A diferencia de la barrera de luz de reflexión, el detector de reflexión no
tiene un reflector propio. Más bien se aprovecha la capacidad de reflexión del objeto o de
la pieza que se entra en la zona cubierta por el detector. Si el haz de luz se topa con una
pieza de superficie reflectante, la luz es dirigida hacia el receptor y así conmuta la salida
del detector. Considerando esta forma de funcionamiento, el detector por reflexión
únicamente puede utilizarse para detectar piezas que tienen una gran capacidad de
reflexión (por ejemplo, superficies metálicas).
Figura 2.5.3.3.3-6. Aplicación de detector por reflexión.
Fuente:
http://www.festo.com/net/SupportPortal/Files/53454/Sensoren_Broschuere_es_bV08_M
2.5.4 Relevador.
Un relé es un interruptor accionado electromagnéticamente, en el que el circuito controlado y el
circuito controlador están separados entre sí galvánicamente. Esencialmente está compuesto por
una bobina con núcleo de hierro, un inducido como elemento de accionamiento mecánico, un
muelle de recuperación y los contactos de conmutación. Al conectar una tensión en la bobina del
electroimán se produce un campo electromagnético. De esta manera, el inducido móvil es atraído
por el núcleo de la bobina. El inducido actúa sobre los contactos del relé. Dependiendo del tipo de
relé, los contactos se abren o cierran. Si se interrumpe el flujo de corriente a través de la bobina, el.
inducido recupera su posición inicial mediante la fuerza de un muelle.
35 !Página

Nuc,,, ARMADURA
/ CONTACTOS DOUIRA
BAS RERIMRAIR
Figura 2.5.4-1. Partes del relevador.
Fuente: bittordiwww-iniviental1111,eidiirignrimiluedion-allans-ffellsi
Con un relé se pueden activar uno o varios contactos. Además del tipo de relé antes descrito,
existen otros tipos de interruptores o conmutadores accionados eléctricamente, como, por
ejemplo, el relé de remanencia, el relé de temporización y el contactor. En la práctica se
utilizan símbolos para los relés, para facilitar mediante una representación sencilla la
lectura de esquemas de circuitos.
A1 13 23 43
s i K1 r-1-1,
1 \I A2 14 24 34 44
Figura 2.5.4-2. Numeración del relé.
El relé se denomina Kl,siendo sus conexiones Al y A2 .El relé esquematizado tiene 4
contactos de cierre, la figura 2.5.4-2 lo muestra claramente.
Con relación a la numeración de los contactos que arrastra el relé la primera cifra es una
numeración continua de los contactos. La segunda cifra, en el presente ejemplo, siempre 3
4, indica que se trata de un contacto de cierre (figura 2.5.4-2).
En la figura 2.5.4-3 se trata de un relé también con 4 contactos, pero esta vez de apertura.
También aquí se efectúa la numeración continua de la primera cifra, la segunda 1 y 2 indica que se
trata de contactos de apertura.
Al 11 21 31 41
I 1..
L
.1 KILT j-- ./.. -
I . .-. A2 12 22 32 42
Figura 2.5.4-3. Numeración del relé contactos de apertura.
Cuando hacen falta contactos distintos, se emplean relés con contactos de apertura, de
cierre o de conmutación en un mismo elemento. La designación numérica es una gran ayuda en la
práctica ya que facilita considerablemente la conexión de relés (figura 2.5.4-4).
Al 14 12 24 22 34 32 44 42
K1
A2
11 21 31 41
Figura 2.5.4-4.
361Página
2.5.5 Controlador Lógico programable (PLC).
Los Controladores Lógicos Programables son instrumentos semejantes a pequeños micro
controladores o microcomputadoras diseñadas para controlar equipo industrial. Usa una
memoria programable para el almacenamiento interno de instrucciones para realizar
funciones específicas, tales como lógica, secuenciación, registro y control de tiempos, conteo
y operaciones aritméticas para controlar, a través de módulos de entrada/salida digitales o
analógicos, varios tipos de máquinas o actuadores de procesos.
El PLC es una gran herramienta para el control de sistemas electroneumáticos, debido a la
simplificación que representa si consideramos un proceso muy extenso y complicado donde
requiere el uso de muchos relevadores.
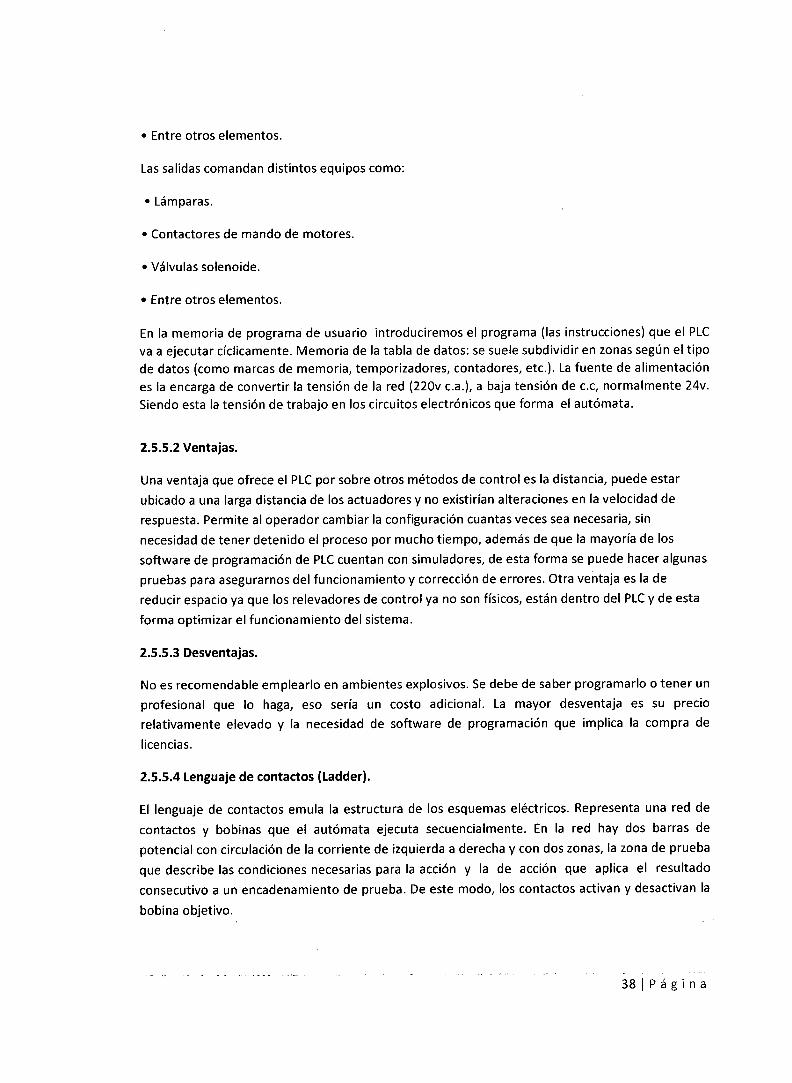
2.5.5.1 Estructura de un PLC.
Existen diversos modelos de PLC en el mercado producidos por diferentes compañías todos
ellos cuentan al menos con tres partes en común como es La unidad central de
procesamiento (CPU) y su memoria asociada, los módulos de entradas y salidas, la unidad de
programación y la fuente de alimentación como se muestra en la siguiente figura.
Figura 2.5.5.1. Estructura del PLC.
El CPU es el cerebro del PLC, recibe la señal en el módulo de entradas y basado en estas y
en el programa grabado en la memoria, decide sobre señales de salida apropiadas, que
luego transmitirá a los módulos de salida respectivos. Las entradas se encargan de adaptar
señales provenientes de la planta a niveles que la CPU pueda interpretar como información.
En efecto, las señales de planta pueden implicar niveles y tipos de señal eléctrica diferentes
a los que maneja la CPU. En forma similar, las salidas comandan dispositivos de planta en función
de la información enviada por la CPU. Es decir, Los módulos de entrada y salida proveen la
interfaz necesaria, entre PLC y la máquina o sistema a ser controlado. A las entradas se
conectan elementos como:
Pulsadores.
Interruptores de final de carrera.
Sensores.
37 !Página
Entre otros elementos.
Las salidas comandan distintos equipos como:
Lámparas.
Contactores de mando de motores.
Válvulas solenoide.
Entre otros elementos.
En la memoria de programa de usuario introduciremos el programa (las instrucciones) que el PLC
va a ejecutar cíclicamente. Memoria de la tabla de datos: se suele subdividir en zonas según el tipo
de datos (como marcas de memoria, temporizadores, contadores, etc.). La fuente de alimentación
es la encarga de convertir la tensión de la red (220v c.a.), a baja tensión de c.c, normalmente 24v.
Siendo esta la tensión de trabajo en los circuitos electrónicos que forma el autómata.
2.5.5.2 Ventajas.
Una ventaja que ofrece el PLC por sobre otros métodos de control es la distancia, puede estar
ubicado a una larga distancia de los actuadores y no existirían alteraciones en la velocidad de
respuesta. Permite al operador cambiar la configuración cuantas veces sea necesaria, sin
necesidad de tener detenido el proceso por mucho tiempo, además de que la mayoría de los
software de programación de PLC cuentan con simuladores, de esta forma se puede hacer algunas
pruebas para asegurarnos del funcionamiento y corrección de errores. Otra ventaja es la de
reducir espacio ya que los relevadores de control ya no son físicos, están dentro del PLC y de esta
forma optimizar el funcionamiento del sistema.
2.5.5.3 Desventajas.
No es recomendable emplearlo en ambientes explosivos. Se debe de saber programarlo o tener un
profesional que lo haga, eso sería un costo adicional. La mayor desventaja es su precio
relativamente elevado y la necesidad de software de programación que implica la compra de
licencias.
2.5.5.4 Lenguaje de contactos (Ladder).
El lenguaje de contactos emula la estructura de los esquemas eléctricos. Representa una red de
contactos y bobinas que el autómata ejecuta secuencialmente. En la red hay dos barras de
potencial con circulación de la corriente de izquierda a derecha y con dos zonas, la zona de prueba
que describe las condiciones necesarias para la acción y la de acción que aplica el resultado
consecutivo a un encadenamiento de prueba. De este modo, los contactos activan y desactivan la
bobina objetivo.
38 ¡Página

RELE5
1:0/6
E FtELE2
[
Una red está compuesta de una serie de contactos conectados en serie, en paralelo o combinación
.de ambos, que dan origen a una salida (activación de una bobina o de una función especial).
Figura 2.5.5.4-1. Lenguaje ladder en Automation Studio.
En este lenguaje gráfico, derivado del lenguaje de relés su principal ventaja es que los símbolos
básicos están normalizados según el estándar IEC y son empleados por todos los fabricantes. Los
símbolos básicos son:
I I- CONTACTO NORMALMENTE ABIERTO
/1"- CONTACTO NORMALMENTE CERRADO
ASIGNACIÓN DE SALIDA
Figura 2.5.5.4-2. Símbolos básicos del lenguaje ladder.
Con este tipo de diagramas se describe normalmente la operación eléctrica de distintos
tipos de procesos, y puede utilizarse para sintetizar un sistema de control y, con las
herramientas de software adecuadas, realizar la programación del PLC.
Se debe recordar que mientras que en el diagrama eléctrico todas las acciones ocurren
simultáneamente, en el programa se realizan en forma secuencial, siguiendo el orden en el
que los "escalones" fueron escritos, y que a diferencia de los relés y contactos reales (cuyo
número está determinado por la implementación física de estos elementos), en el PLC se
puede considerar que existen infinitos contactos auxiliares para cada entrada, salida, relé auxiliar
o interno, etc.
Una bobina no puede estar conectada directamente a la barra de inicio. A la derecha de una
bobina no es posible programar ningún contacto. El número de contactos posibles en serie o en
39 1Página

paralelo es prácticamente ilimitado. Cada contacto representa un bit determinado, y se puede
realizar operaciones como AND, OR y NOT como se muestra a continuación.
RELE3
Figura 2.5.5.4-3. Función OR.
RELE2 RELE4
Figura 2.5.5.4-4. Función AND.
RELES
Figura 2.5.5.4-5. Función NOT.
2.5.6 Componentes auxiliares de circuitos electroneumáticos.
2.5.6.1 Válvula reguladora de caudal.
Tienen la misión de estrangular el caudal de aire en las conducciones. Los reguladores de caudal se
dividen en dos grupos:
- Reguladores unidireccionales.
- Reguladores bidireccionales.
Los reguladores de caudal unidireccionales disponen de dos caminos en paralelo para el paso del
aire. En uno de ellos hay un antirretorno simple y en el otro está la regulación propiamente dicha.
La acción de regulación sólo se manifiesta en el sentido en el cual el antirretorno impide el paso,
puesto que en el otro sentido el caudal de aire pasa libre.
40 1Página

Figura 2.5.6.1-1. Válvula unidireccional dibujo en sección y símbolo.
Fuente: fundamentos de la técnica de automatización FESTO.
Figura 2.5.6.1-2. Válvula unidireccional imagen real.
Fuente: IhttttlimOttesveufbataastomAtafilies eldhoionliardts MIRO)
En los reguladores bidireccionales no existe la válvula antirretorno y, en consecuencia, el efecto
estrangulador se manifiesta en ambos sentidos de paso.
2
Figura 2.5.6.1-3. Válvula bidireccional símbolo.
Cuando se intenta controlar la velocidad de movimiento de un cilindro neumático, los reguladores
de caudal se instalan con el sentido libre de paso hacia el cilindro. Con esta instalación el aire llega
pleno hacia el cilindro y los reguladores actúan sobre el aire que escapa de él.
2.5.6.2 Unidad de mantenimiento (FRL).
La unidad de mantenimiento está formada por el filtro, el regulador y el lubricador. La unidad de
mantenimiento deberá montarse siempre en ese orden siguiendo la circulación del aire.
Se usa para salvaguardar la integridad de los elementos neumáticos y electroneumáticos.
Constituyen unidades indispensables para el correcto funcionamiento de los sistemas
41 1Página
neumáticos y para prolongar la vida útil de los componentes. Se instala en la línea de
alimentación del circuito, lubricado y regulado a la presión requerida.
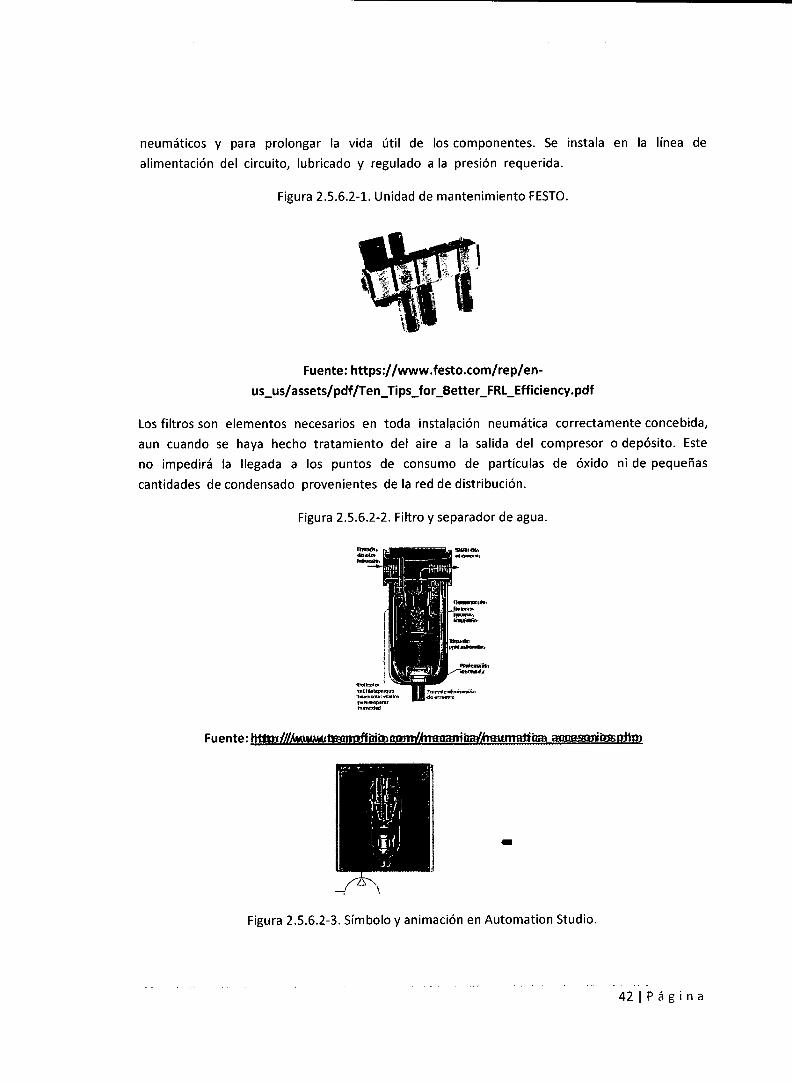
Figura 2.5.6.2-1. Unidad de mantenimiento FESTO.
Fuente: https://www.festo.com/rep/en-
us_us/assets/pdf/Ten_Tips_for_Better_FRL_Efficiency.pdf
Los filtros son elementos necesarios en toda instalación neumática correctamente concebida,
aun cuando se haya hecho tratamiento del aire a la salida del compresor o depósito. Este
no impedirá la llegada a los puntos de consumo de partículas de óxido ni de pequeñas
cantidades de condensado provenientes de la red de distribución.
Figura 2.5.6.2-2. Filtro y separador de agua.
Fuente: httiviáwmwitialanufittiitannolnrazaaniimikammatitta) aumnritnIrditi)
Figura 2.5.6.2-3. Símbolo y animación en Automation Studio.
42 ¡Página
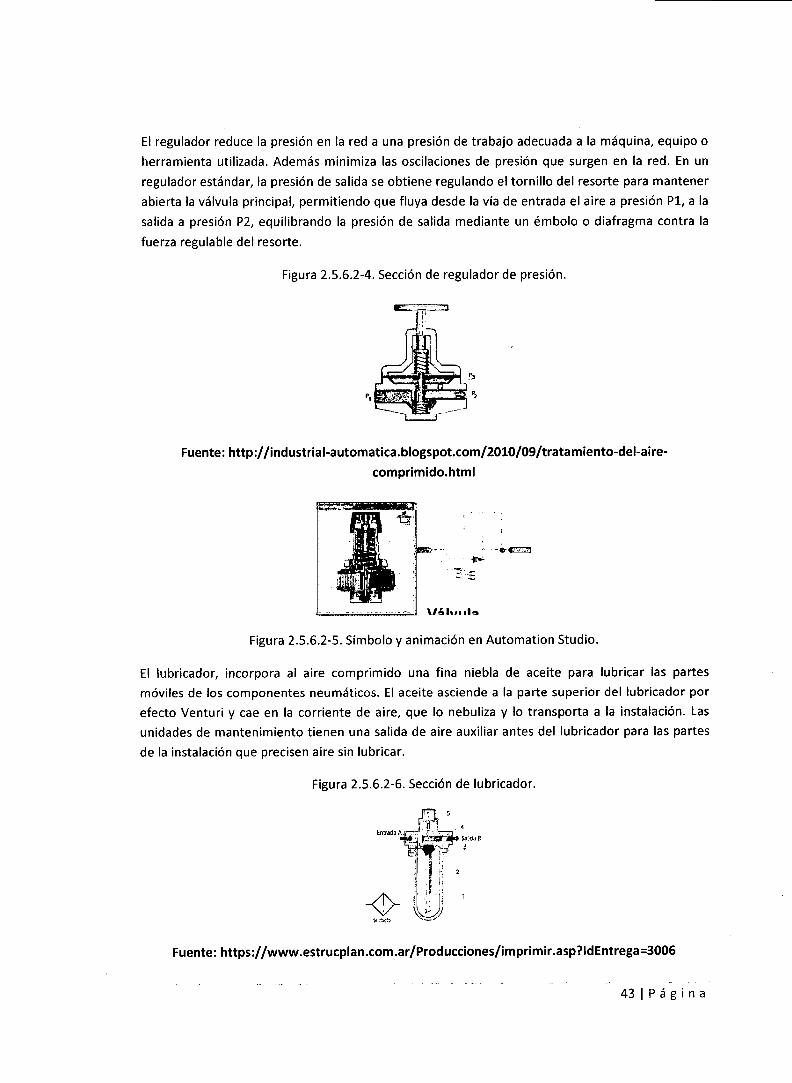
El regulador reduce la presión en la red a una presión de trabajo adecuada a la máquina, equipo o
herramienta utilizada. Además minimiza las oscilaciones de presión que surgen en la red. En un
regulador estándar, la presión de salida se obtiene regulando el tornillo del resorte para mantener
abierta la válvula principal, permitiendo que fluya desde la vía de entrada el aire a presión PI., a la
salida a presión P2, equilibrando la presión de salida mediante un émbolo o diafragma contra la
fuerza regulable del resorte.
Figura 2.5.6.2-4. Sección de regulador de presión.
Fuente: http://industrial-automatica.blogspot.com/2010/09/tratamiento-del-aire-
comprimido.html
Figura 2.5.6.2-5. Símbolo y animación en Automation Studio.
El lubricador, incorpora al aire comprimido una fina niebla de aceite para lubricar las partes
móviles de los componentes neumáticos. El aceite asciende a la parte superior del lubricador por
efecto Venturi y cae en la corriente de aire, que lo nebuliza y lo transporta a la instalación. Las
unidades de mantenimiento tienen una salida de aire auxiliar antes del lubricador para las partes
de la instalación que precisen aire sin lubricar.
Figura 2.5.6.2-6. Sección de lubricador.
Fuente: https://www.estrucplan.com.ar/Producciones/imprimir.asp?IdEntrega=3006
43 I P á -g i n a
%---1111•11111
Lubricador
Figura 2.5.6.2-7. Símbolo y animación en Automation Studio.
2.5.6.3 Silenciadores.
Los silenciadores de escape neumático pueden reducir efectivamente el ruido del equipo
neumático. Los silenciadores están diseñados para brindar un equilibrio óptimo entre la reducción
del ruido y la presión inversa aceptable en el sistema neumático. Los silenciadores de plástico
poroso ofrecen numerosas ventajas sobre los silenciadores acústicos de metal, incluyendo un peso
significativamente menor, resistencia mejorada a la corrosión, capacidad para filtrar partículas y
aerosoles, durabilidad, velocidad de montaje y rentabilidad.
Figura 2.5.6.3. Silenciador real.
a Fuente: http://www.festo.cornicaties-mx_mx/products_080100
2.5.6.4 Manómetro.
La medida básica en los circuitos neumáticos es la presión. El aparato que mide la presión se
denomina manómetro. Los manómetros, son dispositivos cilíndricos, con una escala graduada
(normalmente en bares o en psi), y una aguja que gira en función de la diferencia de presión entre
una estándar y la del circuito donde queremos medir.
Figura 2.5.6.4-1. Símbolo.
Figura 2.5.6.4-2. Manómetro real FESTO.
44 1Página

Fuente: http://www.festo-didactic.comies-es/productos/equipos-de-
practicasineumatica/componentes/manometro.htm?fbid=ZXMuZXMuNTQ3LjEOLjE4LjU2NC4zN
Dky
2.6 Circuitos Electroneumáticos.
El mando a largas distancias de las válvulas por medio de señales neumáticas puede presentar
algunos retardos en los accionamientos. Las señales eléctricas no tienen este inconveniente, ya
que las distancias no les afectan en este sentido.
Los métodos de diseño que se les pueden aplicar en su construcción son intuitivo, cascada, paso a
paso, secuencial y mediante el lenguaje LADDER del PLC.
2.6.1 Métodos de diseño.
Son varios los métodos empleados para la representación gráfica comprensible de los procesos
automáticos.
- Si un cilindro "A" se mueve en el sentido de salir el vástago, decimos que va hacia (A-i-).
- Si un cilindro "A" se mueve en el sentido de entrar el vástago, decimos que va hacia (A-).
2.6.1.1 Diagrama de funcionamiento.
Se emplea para representar la secuencia de movimientos que tendrá el cilindro del circuito
neumático o electroneumático, así como también la de los elementos de mando que intervienen
en la secuencia como los sensores.
En general es necesario el diagrama de funcionamiento en aquellos circuitos en donde intervienen
dos o más elementos de trabajo (cilindros), y está formado por los siguientes diagramas:
- Diagrama estado-fase
- Diagrama de señales
2.6.1.1.1 Diagrama espacio-fase.
Es la representación gráfica del ciclo mediante un sistema de ejes cartesianos, el funcionamiento
de cada elemento está representado por una banda horizontal, es decir, tendrá tantas bandas
horizontales como actuadores intervengan en la secuencia. El borde inferior corresponde a la
posición retraída del vástago del cilindro (-) y el borde superior corresponde a la posición de salida
45 ¡Página

-.....1%,......%....1 e .
77 1 11
a0
al
a
del vástago del cilindro (+). En ordenadas se representan las posiciones del cilindro y en abscisas
las diferentes fases de la secuencia.
Nos permite graficar los movimientos de los actuadores en las diferentes fases de la secuencia y
generar la distribución de los finales de carrera en el sistema.
En la figura 2.6.1.1.1-1 se tiene una secuencia de dos cilindros.
B*1 B-I A-
Figura 2.6.1.1.1-1. Ecuación de movimientos.
En la siguiente figura se realiza el diagrama estado-fase de la secuencia anterior.
DIAGRAMA DE ESTADO - FASE
FASE 1
FASE 2
FASE 3
FASE 4
::ç
I
b0 •
ti
.
Figura 2.6.1.1.1-2. Diagrama estado-fase.
Como se muestra en la figura 2.6.1.1.1-2 el diagrama permite una visión rápida de la secuencia y la
activación de los finales de carrera en cada fase. Ya que se tiene la distribución de los finales de
carrera, es necesario el diseño neumático, como se muestra a continuación.
46IPágina

S.0 SuwAtal PlIke41besktepN§14ÜLÁCIót*S110105InST100 rash, IIESIA00.5II
A+ B+ B- A-
Figura 2.6.1.1.1-3. Diseño neumático realizado en FluidSIM.
2.6.1.1.2 Diagrama de señales.
Representa el tiempo que se encuentran activos los finales de carrera. Se puede considerar un
perfeccionamiento del diagrama espacio-fase pues ahora se tiene en cuenta el concepto de
tiempo. Su diagrama es similar al de estado-fase con la salvedad de que en este caso en el eje
de abscisas se representa la variable tiempo, lo que permite determinar el tiempo que
interviene un actuador sobre los sensores o finales de carrera. Para la detección de cruce de
señales lo más aconsejable es el empleo de diagramas de señales, donde se muestra la activación
de los finales de carrera y por tanto el estado de ausencia o presencia de señal en presión en los
pilotajes de las válvulas.Entre los métodos utilizados para anular el cruce de señales está el uso de
válvulas de rodillo abatible que es el método más económico y fiable, permite el accionamiento
neumático en un sentido de la marcha, pero en el otro, el rodillo pasa libre y la función neumática
es ignorada. En la siguiente figura se realiza el diagrama de señales de la figura 2.6.1.1.1-1.
DIAGRAMA DE SEÑALES
FASE 1
a0
al al
FASE 2
FASE 3
FASE 4
I rl
.11
Figura 2.6.1.1.2-1. Diagrama de señales de la secuencia A+, B+, B-, A-.
47 ¡Página

A+ B+ B- A-
A+ o
o
3
Cuando se diseña un circuito neumático lo primero que se hace es dibujar los actuadores y
después las válvulas distribuidoras correspondientes a cada uno de ellos. Una vez representados
estos elementos, se deben tener en cuenta también los captadores de señal que serán accionados
por los propios cilindros.
Al principio no se considera cruce de señales se supone que cada vástago en su final de carrera
accionará la siguiente válvula para producir la etapa siguiente de la secuencia, luego se ubicaran
por medio del método de diagrama de señales.
Figura 2.6.1.1.2-2. Circuito neumático de la secuencia A+, B+, A-, B-.
Las válvulas de doble pilotaje neumático, sólo puede ser controlado por la señal de presión en uno
de ellos, si el otro está descomprimido.
Tal y como se aprecia en la figura 2.6.1.1.2-2 y 2.6.1.1.2-3, la secuencia inicia con el avance del
vástago del cilindro A, pero estando activos inicialmente los captadores "Al" y "AO" ambos envían
señal de presión a los pilotajes de la válvula de este cilindro. Por lo tanto en preciso eliminar el
cruce de señales en estos finales de carrera.
48 ¡Página
A+ B+ B- A-
C.b Irree
fp Cativo
For. de ndrfizeffin 1: "I
Volocieltd de air~n Menkf. Impot.
Offiefees Simot.16n
Tem., de et.o1e ja Dc~eciM de expetel Elado 1-1 111.1e.eg ntvaseu1.11~1 Etta. dor.111.1") 0117
h.. elp1d1r.~1,1mnSefrerm LOGOISM1 Pone e...are. effiec. ágkfies &ie. de M1D,11111D y NOT Hi
r7/ Magne v.% cfi abad. ciple.~5.
CIM CID
A
3
t T
3
ízmiz RIN • 1111111~: a0
al
1.LDAR511ACJW.K.‘5111/1.1113011ilZIptlotISTADO t'aleja, 'USADO-FASO croa oc Cfficacs.o f).
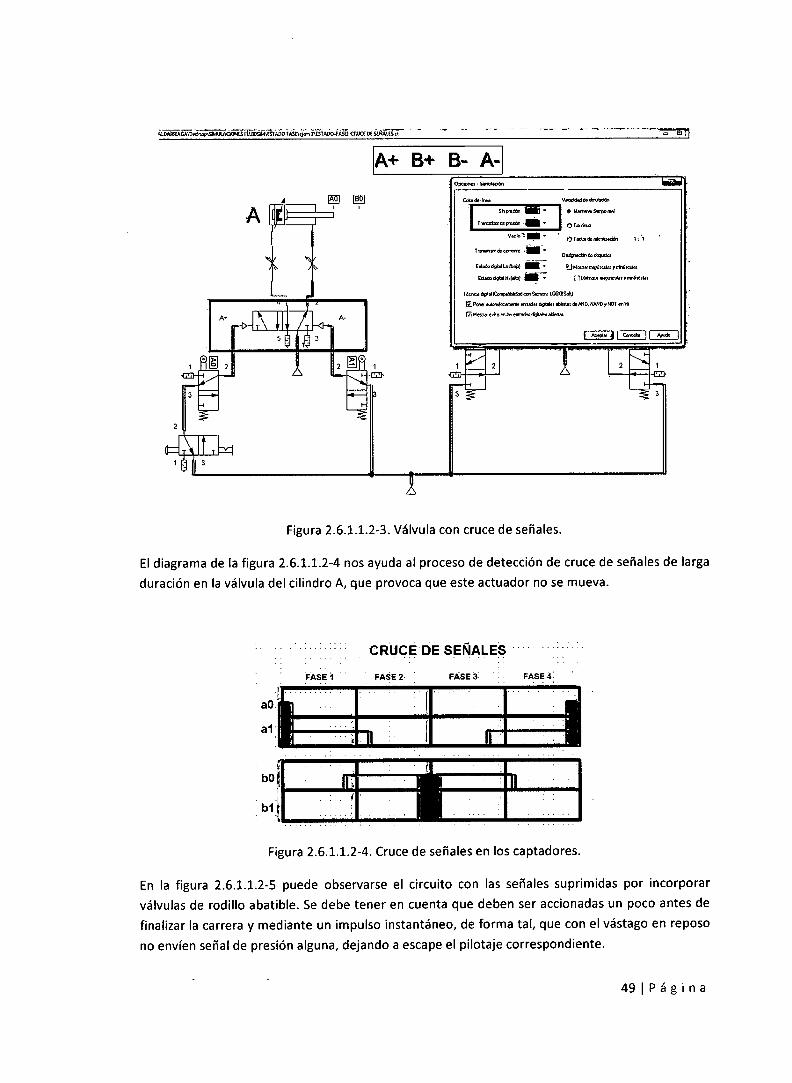
Figura 2.6.1.1.2-3. Válvula con cruce de señales.
El diagrama de la figura 2.6.1.1.2-4 nos ayuda al proceso de detección de cruce de señales de larga
duración en la válvula del cilindro A, que provoca que este actuador no se mueva.
cRypg.DE SEÑALES
FASE 2. FASE 3
Figura 2.6.1.1.2-4. Cruce de señales en los captadores.
:FASE 1: FASE 4:
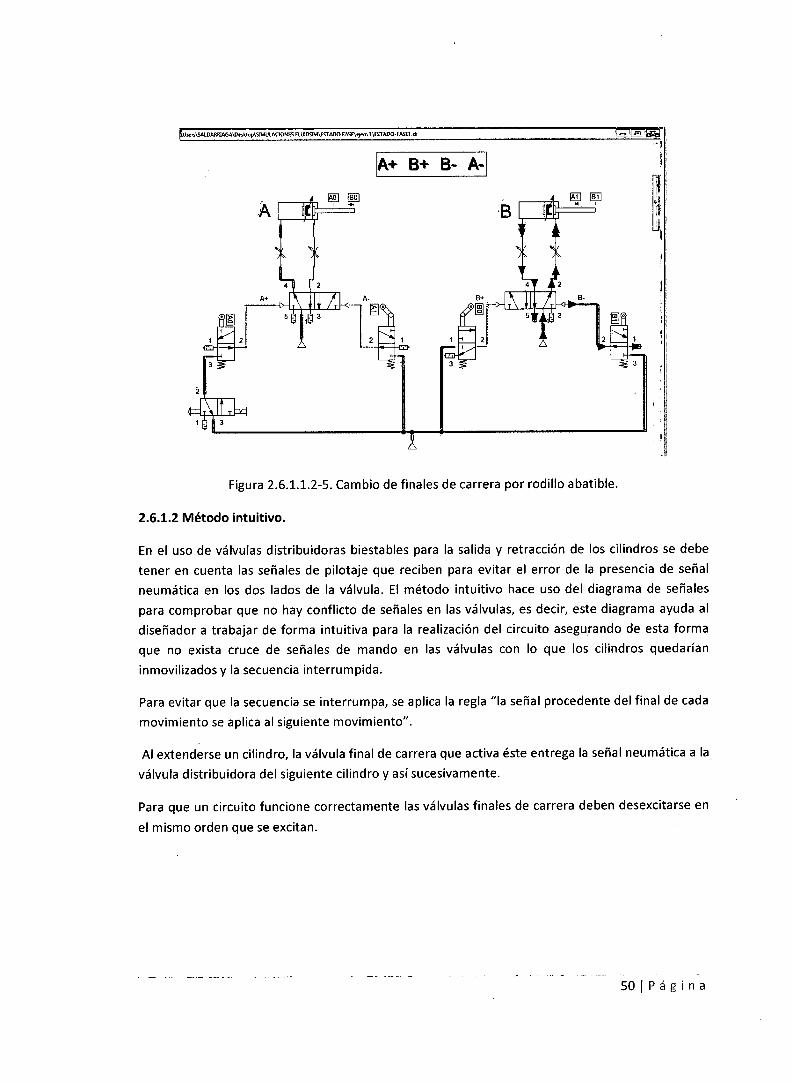
En la figura 2.6.1.1.2-5 puede observarse el circuito con las señales suprimidas por incorporar
válvulas de rodillo abatible. Se debe tener en cuenta que deben ser accionadas un poco antes de
finalizar la carrera y mediante un impulso instantáneo, de forma tal, que con el vástago en reposo
no envíen señal de presión alguna, dejando a escape el pilotaje correspondiente.
491Página
NUsen\ SALDARRIAGAWesktop SIAULACION/3 FLUMSMESTADO FASE \ ejem IlESTADO-FASEI,ct
A+ B+ B- A-
Figura 2.6.1.1.2-5. Cambio de finales de carrera por rodillo abatible.
2.6.1.2 Método intuitivo.
En el uso de válvulas distribuidoras biestables para la salida y retracción de los cilindros se debe
tener en cuenta las señales de pilotaje que reciben para evitar el error de la presencia de señal
neumática en los dos lados de la válvula. El método intuitivo hace uso del diagrama de señales
para comprobar que no hay conflicto de señales en las válvulas, es decir, este diagrama ayuda al
diseñador a trabajar de forma intuitiva para la realización del circuito asegurando de esta forma
que no exista cruce de señales de mando en las válvulas con lo que los cilindros quedarían
inmovilizados y la secuencia interrumpida.
Para evitar que la secuencia se interrumpa, se aplica la regla "la señal procedente del final de cada
movimiento se aplica al siguiente movimiento".
Al extenderse un cilindro, la válvula final de carrera que activa éste entrega la señal neumática a la
válvula distribuidora del siguiente cilindro y así sucesivamente.
Para que un circuito funcione correctamente las válvulas finales de carrera deben desexcitarse en
el mismo orden que se excitan.
50 !Página

A
2
A-
3 -a.
A+B+C+A'.B- C.
Figura 2.6.1.2-1. Esquema neumático de la secuencia.
IAZIF el C-
Figura 2.6.1.2-2. Simulación en FluidSIM.
Al realizar un esquema neumático de forma intuitiva pueden aparecer los ya mencionados
inconvenientes de la coincidencia de señales sobre los pilotajes opuestos de una misma
válvula que impedirían el desarrollo correcto del diagrama de funcionamiento. Sobre este
problema ya se mencionó el uso de diagrama de señales, existiendo otro método para
posibilidad de anular este cruce de señales conocido como sistema cascada que será
tratado a continuación.
51 1Página

2.6.1.3 Método cascada.
Es utilizado para diseñar circuitos neumáticos de una forma más metódica y eliminar con ello las
condiciones de bloqueo que se presentan en el diagrama de funcionamiento cuando existen
señales opuestas en la misma válvula distribuidora.
Se basa en crear un dispositivo de mando que tenga tantas salidas como fases a desarrollar
en la secuencia, entendiendo como fase un grupo de letras de la secuencia en las que no se
repita ninguna.
Se usan dos conjuntos de válvulas direccionales, uno trabajando sobre los actuadores, formado
por tantas válvulas como cilindros y el otro formado por un grupo de válvulas cascada que
suministra aire a presión a las líneas de los grupos. Las válvulas cascada se conectan en serie y
eliminan la presión en una línea y entregan presión a la otra al pasar de un grupo de secuencia a
otro y como no hay ninguna letra repetida entonces no habrá conflicto de señales en las válvulas.
A continuación se describen los pasos necesarios para resolver una secuencia lógica de
operaciones.
Realizar la partición de los grupos evitando que en un mismo grupo se repita una
letra.
El número de grupos -1 va a ser igual al número de válvulas 5vias / 2 posiciones (5/2) que
se requieren en el circuito.
Se hace uso del diagrama de conexión que nos ayuda al diseño del esquema.
Se inicia la secuencia de movimientos con la válvula marcha-paro o de arranque,
conectada en serie con la válvula de control de líneas.
El suministro de aire para las señales de pilotaje de cada grupo, se conecta a una línea de
presión común y por lo tanto, hay tantas líneas de trabajo como grupos existan.
Explicaremos este método con la siguiente secuencia A+, B+, A-, B-.
1) Primero se deben definir cuantas líneas se necesitaran para habilitar la secuencia,
independiente de las fases que tenga. Si en la secuencia se repite una letra se genera
una línea de trabajo como se muestra en la siguiente figura.
„B3-
'11:42
Figura 2.6.1.3-1. Definición de la cantidad de líneas de trabajo.
La línea de trabajo "L1" se encarga de habilitar sólo el avance de A y B.
La línea de trabajo "L2" se encarga de habilitar sólo la retracción de Ay B.
52 ¡Página

Como el número de grupos es 2 entonces el número de válvulas a usar será 1. Se usa
sólo una válvula la cual genera dos líneas de trabajo que permite habilitar a L1 y L2.
L2 L1
CL2 kiWie 1 CL1
Figura 2.6.1.3-2. Válvula que gobierna las líneas de trabajo.
como se puede apreciar en la figura 2.6.1.3-2 cuando está activo CL1 (cambio a la
línea 1) la línea L2 se encuentra en escape, por esto en este tipo de método no se
presenta cruce de señales.
Conexión de las válvulas cascada a los finales de carrera, cada movimiento del
actuador está asociado a un final de carrera.
12
1.2a0, . C11, L2b0
Figura 2.6.1.3-3. Diagrama de conexión.
Este diagrama permite el diseño del circuito, pues en él se encuentran todas las
conexiones que se necesitan.
53 ¡Página

o
A-
3 5
o 3
A
12
CL2
tr
Figura 2.6.1.3-4. Esquema del circuito.
,9114b S* A- I •3
JI
Figura 2.6.1.3-5. Simulación de la secuencia en FluidSIM.
54 1Página
fr

F4 C)-j K3 F2 0--\
X4 \ K3
Y1 / K2
CV. o
o
K1 BA
K1
+24V
K1 \ K3 \
En la siguiente figura se muestra la conexión en cascada de las válvulas para una secuencia con 3
líneas de trabajo.
CL1
Figura 2.6.1.3-6. Válvula que gobierna tres líneas de trabajo.
A partir de este punto se empezará a realizar el diseño y control de los sistemas electroneumáticos
haciendo uso de relés, es necesario entender los conceptos relacionados a esta parte para
aplicarlos al método cascada y los siguientes métodos.
2.6.1.3.1 Diagrama de contactos.
El uso de relés para controlar sistemas automáticos es una tecnología antigua utilizada
anteriormente para el control eléctrico antes que estuvieran disponibles los PLC. Esta tecnología
se ha visto limitada en su aplicación a sistemas neumáticos debido a la evolución de la neumática
robusta, apta para condiciones peligrosas, y a que, generalmente, la instalación es más fácil.
En la siguiente figura se muestra un diagrama de contactos, que simboliza el funcionamiento del
control mediante relés y electroválvulas de un sistema de control.
Figura 2.6.1.3.1-1. Diagrama de contactos.
55 1 Página

Este tipo de diagramas está estandarizado de manera que la línea superior es la de voltaje
positivo, mientras que la línea inferior es la de O voltios. Las diferentes líneas de unión entre la
línea positiva y negativa representan funciones lógicas compuestas de contactos de conmutación y
contactos de relé que controlan las bobinas de relés y los solenoides de las válvulas del sistema.
Funciones de memoria de la señal.
Uno de los requisitos lógicos comunes dentro de un circuito de relés es el de una función de
memoria, necesaria cuando existe una señal breve. Al activarse dicha señal tiene que mantenerse
para que las acciones subsiguientes se lleven a cabo cuando la señal se desactiva. En el caso de un
circuito de relés, esto se puede conseguir programando un relé para "enclavarse" mediante un par
de contactos propios.
Una electroválvula biestable mantiene su posición de conmutación aunque la bobina
correspondiente ya no está excitada. Por ello, puede asumir la función de memoria.
La memorización de la señal en la parte de potencia del sistema de control puede estar a cargo de
una electroválvula biestable o, también, de un relé con función de autorretención.
Enclave eléctrico: es una conexión de relevadores como memorias del paso anterior.
Figura 2.6.1.3.1-2. Enclave eléctrico.
En la mayoría de los circuitos de control se eligen válvulas de doble solenoide para el mando de los
actuadores neumáticos, puesto que éstos proporcionan una función biestable en el caso de un
fallo de suministro eléctrico, simplificando el diseño de circuitos de relés.
56 I P á gina

2.6.1.3.2 Método cascada electroneumática.
Para realizar un diseño utilizando este método se divide la secuencia en grupos. ES
recomendable dividir al grupo en donde el actuador tiene que realizar dos movimientos
simultáneamente.
La secuencia A+ C- C+ B- A- B+ se dividirá en tres grupos quedando de la siguiente manera cada
grupo:
A+ Grupo l
C- Grupo II
C+B- Grupo III
A-B+ Grupo IV
A cada grupo en el circuito de mando le corresponde un relé que cerrará o abrirá contactos según
el movimiento que corresponda. Entonces asignamos relés a los grupos de la secuencia anterior.
A+ Grupo I (K1)
C- Grupo II (K2)
C+B- Grupo III (K3)
A-B+ Grupo IV (K4)
Donde las letras "K" significan los relevadores. Para poder iniciar la secuencia primero se diseña el
circuito de los grupos y para realizar el diseño de control de las secuencias se conecta en
serie según la secuencia respectivamente con un contacto normalmente abierto del relé
respectivo al grupo y los grupos que le persiguen, se conecta un contacto normalmente
cerrado del relé del grupo que sigue esto se realiza por seguridad y garantiza el funcionamiento
de la secuencia eliminando el control doble. La activación de los grupos lo realiza la última
acción que le persigue.
El siguiente cuadro ayuda al diseñador a entender qué elementos componen cada grupo.
7111INSICIDI‘iá 'GRUPO RELI SOLEN.DEDE.ACEI VA 1ÍINA1. DI:CAMERA
A+ 1 K1 A+ al
C- II. K2 i ,C- 'ce,
C+ 8- 1111i IK3 Cf., 8 ci. , bo'
IV. iK4, :A- , B+ ,. a° , bi
Figura 2.6.1.3.2-1. Cuadro de elementos del esquema.
57 1Página

OV 0 +
+24V ~11 ~O "2 65541420 0111.11X1
CO Cl AO Al
Figura 2.6.1.3.2-2. Diseño electroneumático cascada.
El siguiente cuadro muestra los grupos que se activarán con la excitación de cada relé. Para mejor
entendimiento describimos la activación de los grupos.
GRUPO
-0> A+ '••••••)›. INACTIVO
ItC2
II C- ACTIVO
II -••••• INACTIVO
III C+ .-T), ACTIVO
IV A-B+ INACTIVO
I A+ ACTIVO
Figura 2.6.1.3.2-3. Cuadro de activación.
Funcionamiento del Grupo I. Al accionar BA en serie con la última acción en el final de carrera
b1, activa al relé K1 y por lo tanto al grupo I, este grupo está conectado a un contacto
normalmente cerrado del relé K2, que es del grupo II, por seguridad para que desactive al
grupo I.
58 ¡Página

.24V eglion»11 10~ <E0113,11) JIM 4i
A B.
BU B1 CO C1
=MEIN 5
Funcionamiento del Grupo II. El final de carrera al conectado en serie con un contacto
normalmente cerrado del relé K3 y un contacto normalmente abierto de Kl, accionará al relé K2
por lo tanto activará el grupo II y desactivará al anterior.
Funcionamiento del Grupo III. El final de carrera c0 conectado en serie con un contacto
normalmente cerrado del relé K4 y un contacto normalmente abierto de K2, accionará al relé K3
por lo tanto activará el grupo III y desactivará al anterior.
Funcionamiento del Grupo III. El final de carrera b0 conectado en serie con un contacto
normalmente abierto de K3, accionará al relé K4 por lo tanto desactivará el relé K3 y permite
iniciar el ciclo nuevamente.
Figura 2.6.1.3.2-4. Simulación en FluidSIM.
2.6.1.4 Método paso a paso.
Es uno de los métodos de control de circuitos secuenciales muy útil, el cual está basado en que
para activar una fase es necesario desactivar la fase anterior, generando así una secuencia. Para
entender este método es necesario conocer el "enclave eléctrico".
A continuación se describen los pasos necesarios para resolver una secuencia de
operaciones a través de este método:
Se debe escribir correctamente la secuencia y dividirla en tantos grupos como fases tenga.
_ 59 1Página
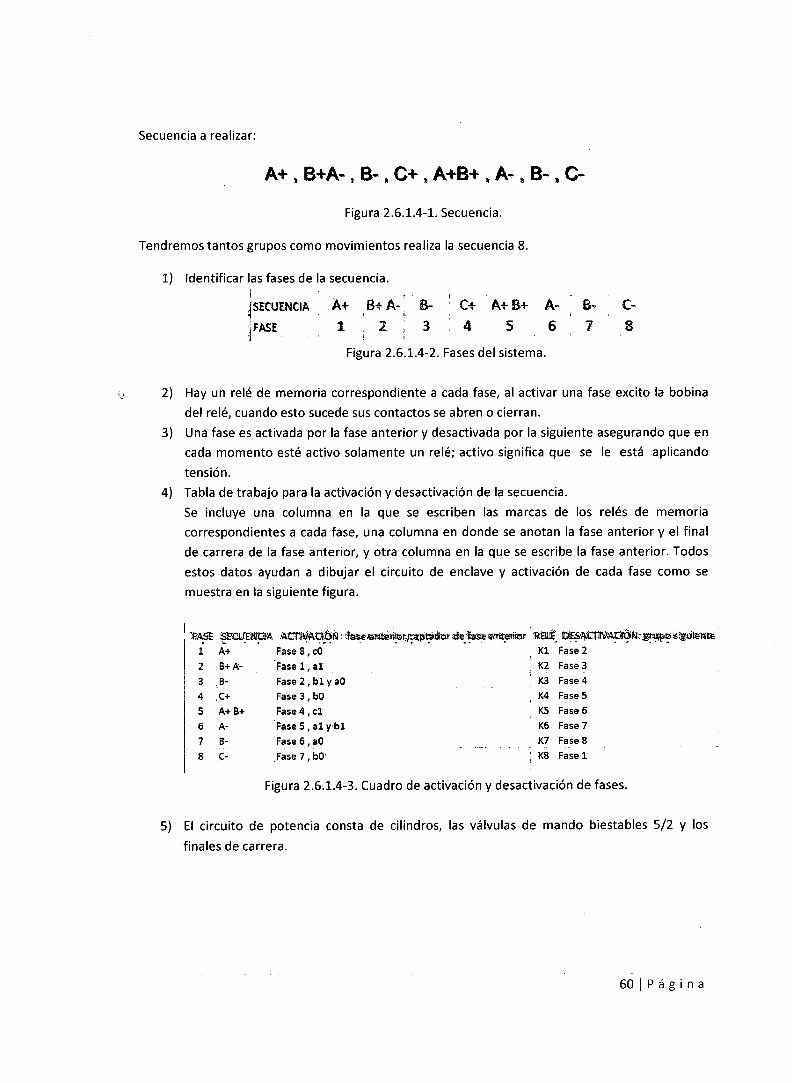
Secuencia a realizar:
A+ , B+A-
Figura 2.6.1.4-1. 2.6.1.4-1. Secuencia.
Tendremos tantos grupos como movimientos realiza la secuencia 8.
1) Identificar las fases de la secuencia. 1 1 1SECUENCIA A+ B+ A- B- C+ B+ A
:FASE 1 ' 2 , 3 4 5 6 ' 7 ', 8
Figura 2.6.1.4-2. Fases del sistema.
2) Hay un relé de memoria correspondiente a cada fase, al activar una fase excito la bobina
del relé, cuando esto sucede sus contactos se abren o cierran.
3) Una fase es activada por la fase anterior y desactivada por la siguiente asegurando que en
cada momento esté activo solamente un relé; activo significa que se le está aplicando
tensión.
4) Tabla de trabajo para la activación y desactivación de la secuencia.
Se incluye una columna en la que se escriben las marcas de los relés de memoria
correspondientes a cada fase, una columna en donde se anotan la fase anterior y el final
de carrera de la fase anterior, y otra columna en la que se escribe la fase anterior. Todos
estos datos ayudan a dibujar el circuito de enclave y activación de cada fase como se
muestra en la siguiente figura.
:PASE $10,18/9VA Akelly/AtION ::lale .wrteriiyilellteibár te TaslwIteriiast 'N1111É, DIZ5vArTIVAOhl:: yx10.31.qtiterítt
3: Á+ Fase 8 ,c0 K1 Fase 2
2 .13+ A- 'Fase 1, al 1(2 Fase 3
3 8- Fase 2,blya0 1(3 Fase 4
4 C+ Fase 3 , b0 1(4 Fase 5
5 A+8+ Fase 4 , cl: 1(5 Fase 6
6 A- 'Fase 5, al y,b1 1(6 Fase 7
; B- 'Fase 6 , a0 1(7 Fase 8
8 C- Fase 7 , b0. 1(8 Fase I
Figura 2.6.1.4-3. Cuadro de activación y desactivación de fases.
5) El circuito de potencia consta de cilindros, las válvulas de mando biestables 5/2 y los
finales de carrera.
60 1Página
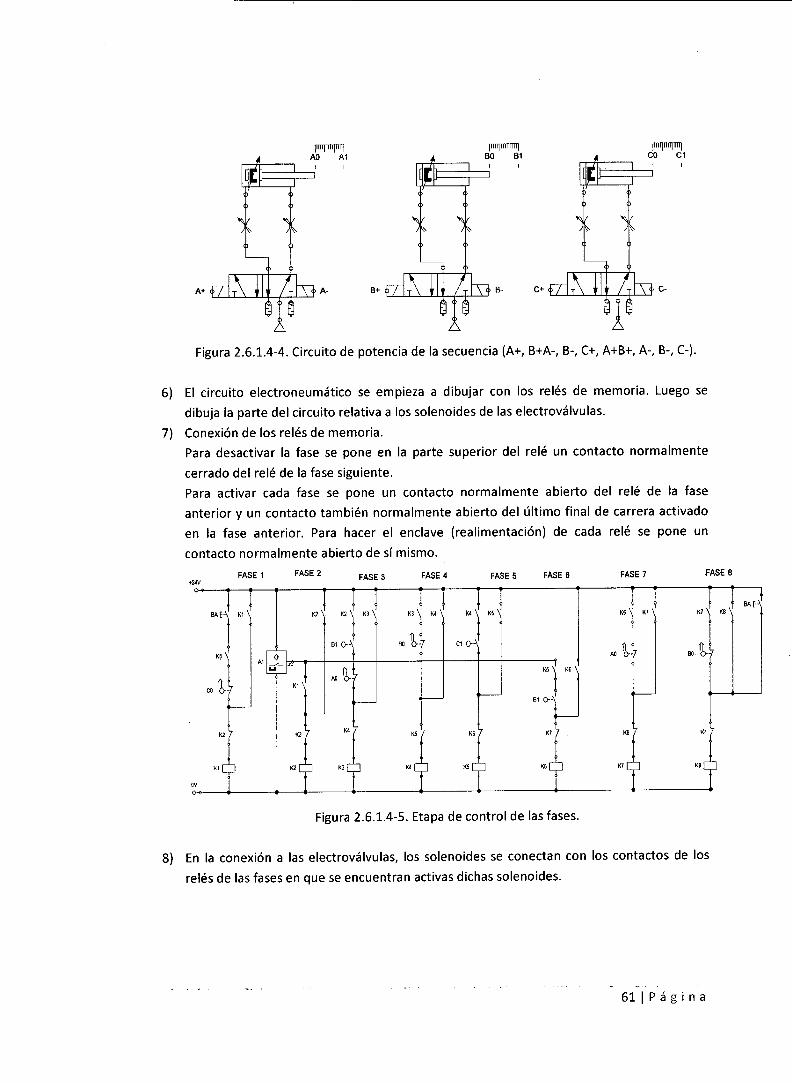
A0 Al BO 81 CO Cl 1
Figura 2.6.1.4-4. Circuito de potencia de la secuencia (A+, B+A-, B-, C+, A+B+, A-, B-, C-).
El circuito electroneumático se empieza a dibujar con los relés de memoria. Luego se
dibuja la parte del circuito relativa a los solenoides de las electroválvulas.
Conexión de los relés de memoria.
Para desactivar la fase se pone en la parte superior del relé un contacto normalmente
cerrado del relé de la fase siguiente.
Para activar cada fase se pone un contacto normalmente abierto del relé de la fase
anterior y un contacto también normalmente abierto del último final de carrera activado
en la fase anterior. Para hacer el enclave (realimentación) de cada relé se pone un
contacto normalmente abierto de sí mismo.
.24V FASE 1
FASE 2 FASE 3
FASE 4
FASE 5 FASE 8
FASE 7
FASE 8
O
o
BA E-\
KB
4
1
K1 \
1 81 0--
K0\ K3 ka
C1 0--
K6\
\
K£
O—
K8
K7
K7 \
BO, 1-
K
KB I
K6\ E \
Al___,
AO
K4
K3
Y K6
K5
KV
1
K6
KV
B1 0--
K6
K1
K3
KV I
/
Figura 2.6.1.4-5. Etapa de control de las fases.
En la conexión a las electroválvulas, los solenoides se conectan con los contactos de los
relés de las fases en que se encuentran activas dichas solenoides.
61 ¡Página
IV
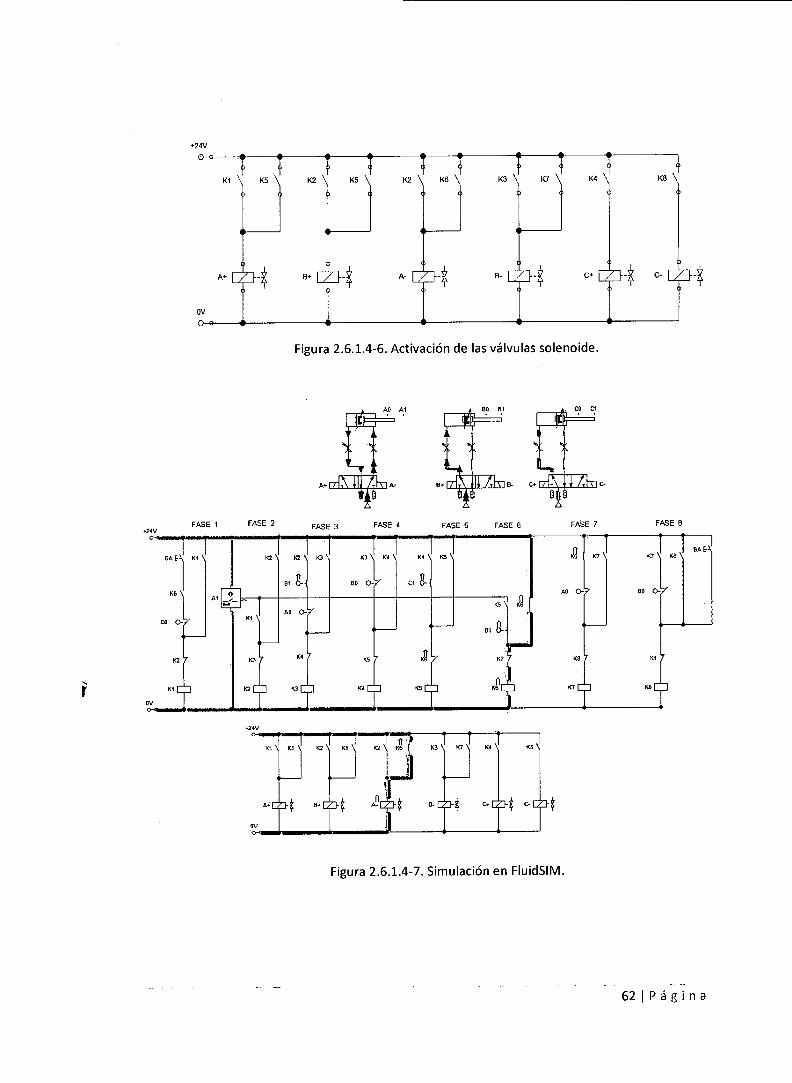
+24V o
K1 \ K2 K5 K2 K6 K3\ o\ Kd K8\
13.- I /FI A- 1/4 B- I / e* I / o- I /
OV
o
Figura 2.6.1.4-6. Activación de las válvulas solenoide.
AO M
.24V FASE 1 FASE 2 FASE 3 FASE 4 FASE 5 FASE 6 FASE 7 FASE 8
.24V
Figura 2.6.1.4-7. Simulación en FluidSIM.
62 ¡Página

2.6.1.5 Método secuencial.
La lógica del método secuencial nos dice que todo relevador debe ser enclavado. Partiremos de la
siguiente secuencia a realizar: A+, B+, A- B-, B"+, B-.
FASES CILINDRO A CILINDRO 8 SENSORES
411-
MOVIMIENTO
C.I o
el
2 bl
CONDICIONES DE CAMBIO
B. 3 e0,b0
E.4 4 bl
b0
Figura 2.6.1.5-1. Condiciones de cambio del sistema.
A continuación explicaremos el método secuencial resolviendo la secuencia anterior.
En condiciones iniciales C.I los cilindros de doble efecto A y B se encuentran retraídos. Iniciamos el
diseño conectando el botón de arranque BA en serie con el botón de paro BP y el relé a enclavar
K1.
+24V
Figura 2.6.1.5-2. Primer paso del diseño electroneumático.
Luego identificamos las electroválvulas a activar EV1 y EV2, y las asociamos a su símbolo eléctrico
en el diagrama de contactos.
63 ¡Página
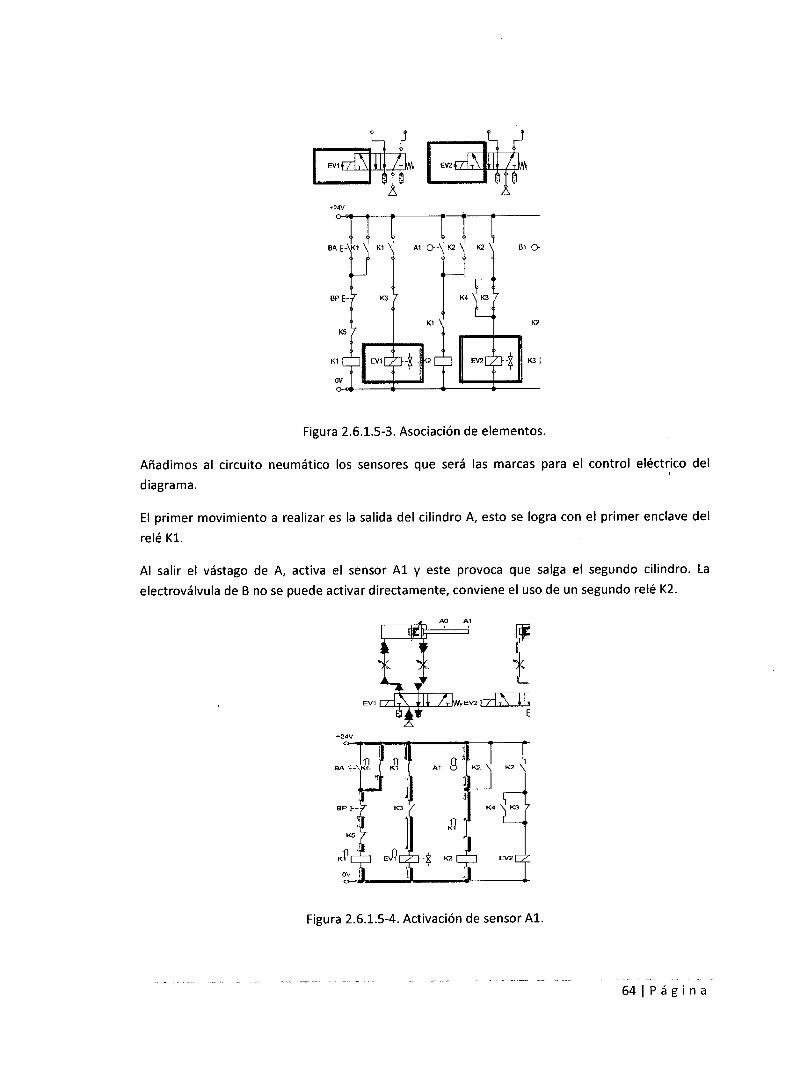
EV1
ZEZ 1 I lyei
+24V
Figura 2.6.1.5-3. Asociación de elementos.
Añadimos al circuito neumático los sensores que será las marcas para el control eléctrico del
diagrama.
El primer movimiento a realizar es la salida del cilindro A, esto se logra con el primer enclave del
relé Kl.
Al salir el vástago de A, activa el sensor Al y este provoca que salga el segundo cilindro. La
electroválvula de B no se puede activar directamente, conviene el uso de un segundo relé K2.
Figura 2.6.1.5-4. Activación de sensor Al.
64 1 Página

+24V
BA E-
BP E
K5
El segundo movimiento es la salida del cilindro B que activa al sensor B1 y excita al relé K3 que
también ha sido enclavado, pero los relevadores K1 y K2 han quedado enclavados.
El tercer paso es que cuando el cilindro B termine de salir ocasione que ambos cilindros regresen,
en los métodos anteriores se rompen los enclaves para lograr esta acción, pero este método se
centra en la desactivación de las electroválvulas que controlan los cilindros, pues si desactivamos
pasos (rompemos enclaves) cada paso anterior desactivará al siguiente y por consecuencia
apagará relevadores que aún tienen órdenes de control que ejecutar.
En la metodología de diagrama de contactos se recomienda que antes de activar un relé debo
preguntar por el relé anterior con esto aseguramos que el tercer paso no se active antes que el
primero, y así protegemos al sistema de que tenga arranque secuencial. Siguiendo esta lógica
antes de activar el relé K2 se debe conectar en serie un contacto normalmente abierto del relé K1
y así con los siguientes relevadores.
Para que ambos cilindros regresen debemos apagar las electroválvulas, entonces conectamos en
serie un contacto normalmente cerrado del relé K3. Con esto desactivamos la carga y no a los
relevadores.
Figura 2.6.1.5-5. Desactivación de cargas.
El paso cuatro debe de extender el vástago del cilindro B, se logra activando un cuarto relé K4 que
de igual manera se enclava y se asegura con un contacto del relé anterior. La señal que activa éste
paso es el regreso y por tanto activación de los sensores AO y BO.
Se debe volver a hacer salir el cilindro B, ya que el flujo de corriente a su electroválvula fue
cortado por un contacto de K3, entonces debemos conectar en paralelo un contacto normalmente
abierto de K4.
El último paso consiste en que el cilindro B regrese, entonces preguntamos por el sensor B1 y
activamos K5, luego conectamos un contacto normalmente cerrado en serie con el primer paso,
esto produce que todos los pasos se desactiven y las electroválvulas se desexciten. El último paso
K1
OV
65 1 P á gina
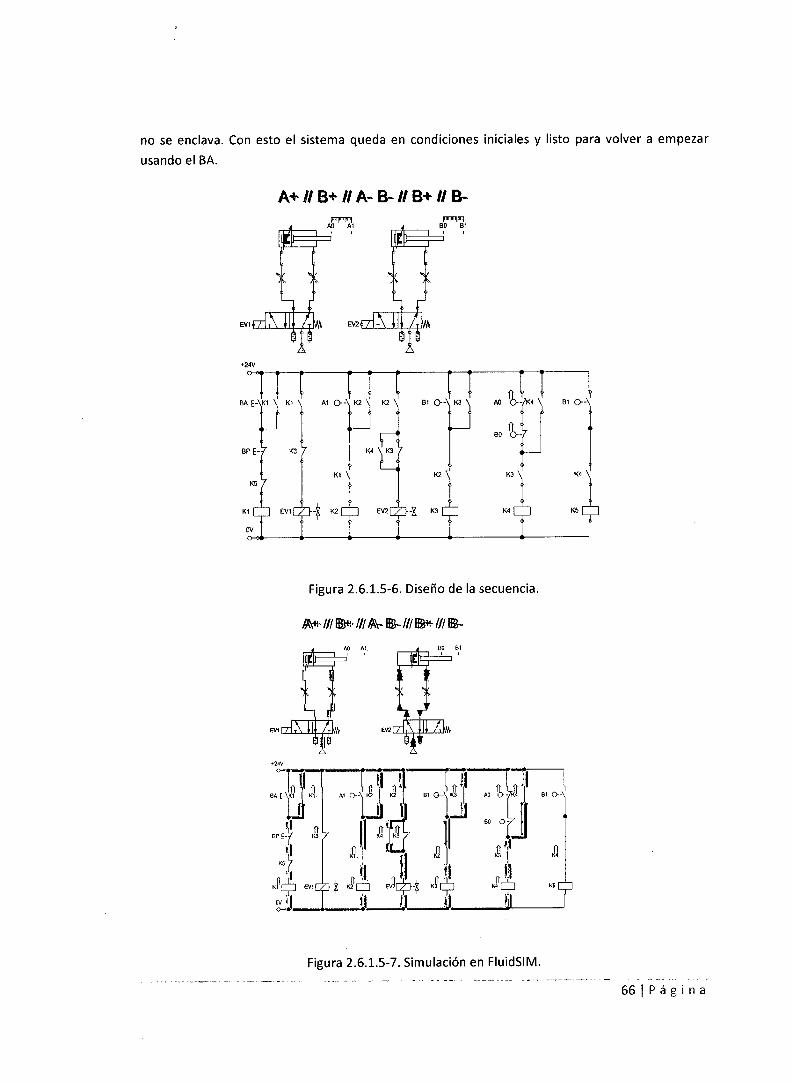
EVI EV2
4k4t-111[1+1•IllAr-
AO Al,
Li EV1
+24V c>.
11
BA E Kl l, 1
BP Er K3
KV
n
Kr! - I EV1
OV 0—q•
no se enclava. Con esto el sistema queda en condiciones iniciales y listo para volver a empezar
usando el BA.
A+ fi B+ 1 1 B- 1 B+ 13- M79 FP9.9
AO Al BO B1
Figura 2.6.1.5-6. Diseño de la secuencia.
Figura 2.6.1.5-7. Simulación en FluidSIM.
66 !Página
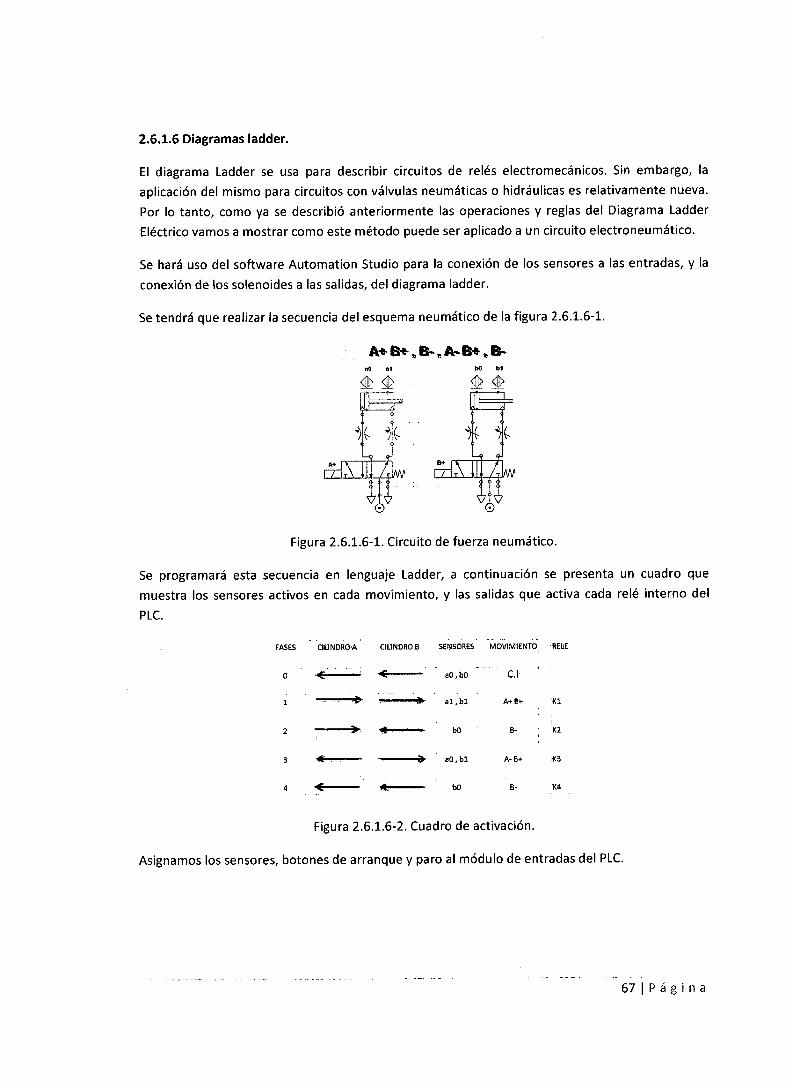
2.6.1.6 Diagramas ladder.
El diagrama Ladder se usa para describir circuitos de relés electromecánicos. Sin embargo, la
aplicación del mismo para circuitos con válvulas neumáticas o hidráulicas es relativamente nueva.
Por lo tanto, como ya se describió anteriormente las operaciones y reglas del Diagrama Ladder
Eléctrico vamos a mostrar como este método puede ser aplicado a un circuito electroneumático.
Se hará uso del software Automation Studio para la conexión de los sensores a las entradas, y la
conexión de los solenoides a las salidas, del diagrama ladder.
Se tendrá que realizar la secuencia del esquema neumático de la figura 2.6.1.6-1.
A+ E1+ El+ WO Al' 1,0 hl
41>
Figura 2.6.1.6-1. Circuito de fuerza neumático.
Se programará esta secuencia en lenguaje Ladder, a continuación se presenta un cuadro que
muestra los sensores activos en cada movimiento, y las salidas que activa cada relé interno del
PLC.
FASES CILINDROA 'CILINDRO B SENSORES MOVIMIENTO L RELE
O iC--j 1C-------- 40 , b0 CA
1 al ;151 A+ B+ 'Ka.
2 b0 B- SI(2
3 80 bl A- B+ i K3
K4
Figura 2.6.1.6-2. Cuadro de activación.
Asignamos los sensores, botones de arranque y paro al módulo de entradas del PLC.
67 1Página
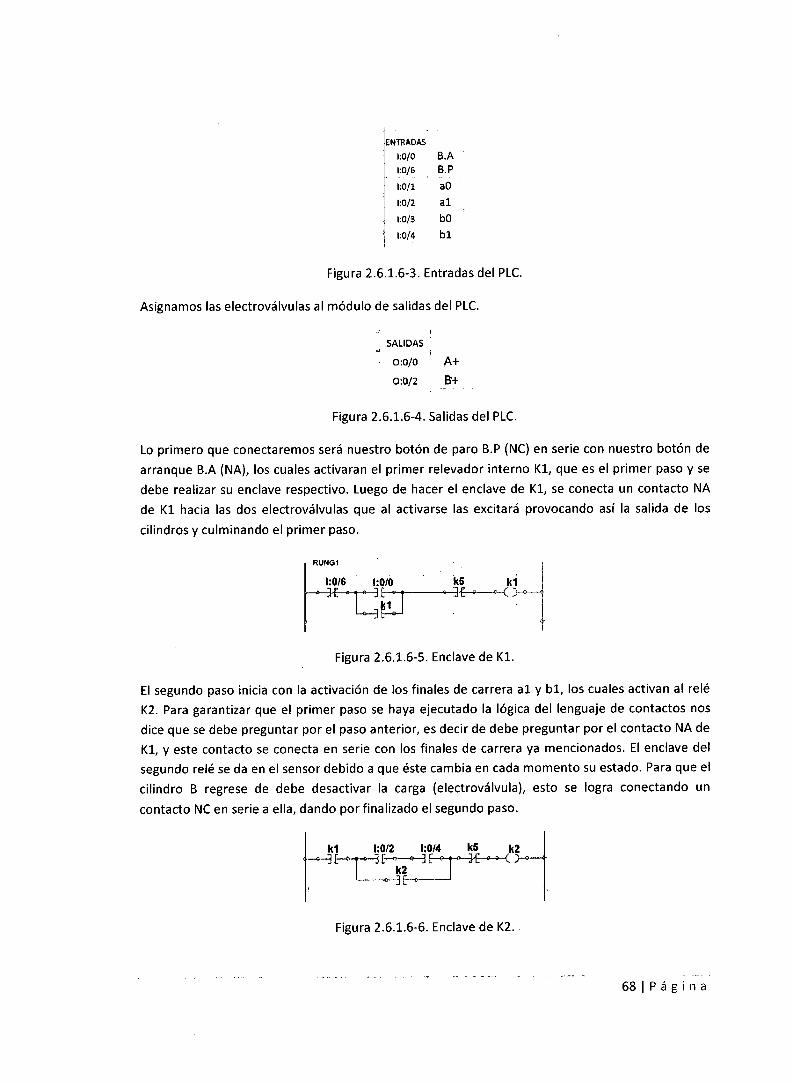
ENTRADAS
1:0/0 B.A i:0/6 B.P
1:0/1 a0
1:0/2 al
1:0/3 b0
1:0/4 bl
Figura 2.6.1.6-3. Entradas del PLC.
Asignamos las electroválvulas al módulo de salidas del PLC.
SALIDAS
OW0 A+
0:0/2 B+
Figura 2.6.1.6-4. Salidas del PLC.
Lo primero que conectaremos será nuestro botón de paro B.P (NC) en serie con nuestro botón de
arranque B.A (NA), los cuales activaran el primer relevador interno K1, que es el primer paso y se
debe realizar su enclave respectivo. Luego de hacer el enclave de Kl, se conecta un contacto NA
de K1 hacia las dos electroválvulas que al activarse las excitará provocando así la salida de los
cilindros y culminando el primer paso.
Figura 2.6.1.6-5. Enclave de Kl.
El segundo paso inicia con la activación de los finales de carrera al y bl, los cuales activan al relé
K2. Para garantizar que el primer paso se haya ejecutado la lógica del lenguaje de contactos nos
dice que se debe preguntar por el paso anterior, es decir de debe preguntar por el contacto NA de
Kl, y este contacto se conecta en serie con los finales de carrera ya mencionados. El enclave del
segundo relé se da en el sensor debido a que éste cambia en cada momento su estado. Para que el
cilindro B regrese de debe desactivar la carga (electroválvula), esto se logra conectando un
contacto NC en serie a ella, dando por finalizado el segundo paso.
kl 1:0/2 1:0/4 k5 k2
k2
Figura 2.6.1.6-6. Enclave de K2.
68 1Página

k4 1:0/3..................k5
El paso numero 3 debe hacer regresar al cilindro A y salir al B, preguntamos por el contacto
anterior K2 y lo conectamos en serie con el sensor accionado al final del paso 2, que es b0.
Realizamos el enclave y siguiendo la secuencia se activa el relé K3. Este tercer relé debe activar sus
contactos para que excite la válvula de B y desactive la carga de A. Para que lo primero suceda se
debe de conectar un contacto NA de K3 hacia la válvula de B, y para que lo segundo pase
conectaremos un contacto NC de K3 hacia la válvula de A.
k2 1:0/3 k5 k3 o ,
k3
Figura 2.6.1.6-7. Enclave de K3.
El cuarto paso de la secuencia es que el cilindro B regrese a su condición inicial. Para que esto pase
debe de enclavarse los sensores a0 y b1 que se activaron al final del paso anterior, y activar el relé
K4 quien desactivará la electroválvula de B.
Figura 2.6.1.6-8. Enclave de K4.
El último paso consiste en desactivar todas las secuencias, conectado en serie a todos los pasos un
contacto NC de K5, que es el último relé activo.
Figura 2.6.1.6-9. Activación de K5.
69 ¡Página

112 1:0/3 k5 k3
k3
1:012
1..013
1..014
1:015
1:016
L0/7
tofo :1:016.
1011 k1
kl 1:0/2 1:014 k k2 [ o o
1(2
RUNG1
1(3 1 0/1 1 0/4
1(4 1:0/3
.1(1 k3
1(1 k2 k4 0:012
k3 —41—]
1N3
1N5
1N6 0 0
0-
13A O O
:1-11C1:
1NO.
1N1
00
INT
®e o COM
1N4 •
'411
0
1:0/0 - k5
A continuación se muestra el diseño y simulación de la secuencia y la distribución de entradas y
salidas.
Figura 2.6.1.6-10. Diseño en Automation Studio.
70 1Página

I I
:0/0
1:0/1
1:012
1:0f3
I:0/4
:0/6
1:0/6
10/7
RUNG1
1:016 1:010 k5 k1 U0/0
0:011
0:0/2
0:0/3
0:0/4
0:0/5
0:0/13
0017
k2 1:013. k5. k3.
k3
k3 1:011 1:014 k5 k4
k4
END
k1 [21—
k1 1:012 1:014 k5 k2
k2
Figura 2.6.1.6-11. Simulación en Automation Studio.
71 1ágina

2.7 Software de simulación.
Existen programas de diseño de circuitos que facilitan el diseño de instalaciones neumáticas y
electro neumáticas:
- FLUIDSIM NEUMATICA de Festo Didactics que simula componentes digitales, diagramas y
fuerzas en circuitos neumaticos.
AUTOMATION STUDIO es un software de diseño y de simulación capaz de cubrir
necesidades en hidráulica, neumática, electrotecnia, electricidad, controles, HMI y
comunicación. Es fácil combinar todas estas tecnologías para diseñar, documentar y
simular sistemas completos.
- CODESYS Permite programar autómatas de diferentes fabricantes.
2.7.1 FluidSIM 4.5 Neumática.
Es una herramienta de simulación para la obtención de los conocimientos de neumática y
electroneumática. Una característica importante es que permite crear el esquema del circuito
sobre la base de una simulación plenamente explicativa. Soporta el aprendizaje, la formación y la
visualización de los conceptos de la técnica neumática.
El uso de este software permite desarrollar el conocimiento del usuario en problemas neumáticos
a través de la información de constitución, funcionamiento de válvulas, actuadores,
accionamientos así como los métodos para resolver problemas de control doble, y otros
problemas que pueden presentarse en diversas situaciones de aplicación en la industria.
Alrededor del mundo son muchos los centros de educación que emplean el software FluidSIM
como herramienta para el aprendizaje del control neumático, incluyendo a sus estudiantes en el
conocimiento y desarrollo de la misma.
El software esta creado no solo con la finalidad del diseño y simulación, también tiene como
objetivo la enseñanza, es decir, el software mediante su simbología, fotos, presentaciones de
cómo funcionan los dispositivos, ofrece los conocimientos básicos de los elementos neumáticos y
eléctricos que se emplean para el control neumático y electroneumático.
72 !Página

G135==
MalmordmMok. pne.*****~.
=1%ts.. **o* 4* **1W **..
44.14. 1..•.1•*0.01•1» • e* lom• en. d. mir
•••1101•01
•
bell**
150.14...d.•••••••••-•• nuálN *nos ~e In. erIyárrta puo. mr in* lb 1.~ 4111.01 *SO •••11...• 11.•11compro. p. 1
*InhohireiMe •fflo.
11M
SI
III
num....o.. '
**a r
or..~.
irikma IM w 1144 *dm de • b••••
<.-*
C.; r;
1.1 ••
e .14•1••••• • 0+1.4.
tt <••••••.•••~0.4 E. C
a y Uw~aeellya. Mar. MMe
e .••••• ,•••••,..••
k .behét 41+1.a.
nue* COM.14/Me"» filaWnedli~ 111.11~1~.11.111.4.1~~ eialmegeál fell~~1~1~411~11.04e.
Pramor~» C~olimeamal Mer104~~11au ti.~111111~1.1~10 ^
I=ZWZ=I
Figura 2.7.1-1. Ventana de descripción de componente.
Como una herramienta para la enseñanza, el software ofrece una sección donde se puede obtener
información del componente deseado, como se puede ver en la figura 2.7.1-1.
El software también ofrece la ventaja de cambiar los parámetros del dispositivo, en la figura 2.7.1-
2 se observa un ejemplo de esta acción con un cilindro de doble efecto.
Figura 2.7.1-2. Configuración de parámetros.
FluidSIM ofrece la característica que de forma automática revisa el circuito, asegurando de que no
existan dispositivos en el mismo lugar, que se produzcan cortocircuitos o que se repitan las
etiquetas de los componentes.
Dentro del ambiente de este software de pueden encontrar dos ventanas, la primera es la ventana
de trabajo, donde se realiza el diseño y simulación de los circuitos. La segunda es la ventana de
biblioteca de componentes, donde se encuentran todos los dispositivos que usaremos en el
diseño.
73 ¡Página

.24V 23 5 6 O 10 11 12
=8,84- i81,..1~Ira~"tgeoememm~~-w~:~m
B.
3 2 3 3
KA 1-2 111 1 Al :2 1 \ 4<2
6 7
4
• NIT eSsAAArni 0•244.4445•Araows
1-8
1-8
1 He vlerolo 24 Jiu see194442444
in:] e 113110 4I+Ja
eam
c092111
df TM WO IhRtlet
eselkel tle coalla
1--E13 VAA454 treet '•"
e«AlArsa
E-133 Onoes de.*
SerseArei eneVrtefill.
8 Conoz.444.44511.44
1,0
ÑA. fan 1,44•445 114.1454 2.4AA 0*4 1.41•K• 12.444. f.o. 5
45fida.• %tal 14 rV5 Riaeoceoele,
Figura 2.7.1-3. Entorno de diseño del software.
Figura 2.7.1-4. Biblioteca de componentes FluidSIM.
2.7.1.1 Comunicación OPC con otras aplicaciones.
El software FluidSIM permite la posibilidad de intercambiar datos con otras aplicaciones y de este
modo trabajar. La condición de este acoplamiento es que la otra aplicación posea una interfaz de
OPC (OLE for process control).
OPC .- ("OLE for Process Control" procesos de control por OLE)
OLE .- ("Object Linking and Embedding" incrustación y enlazado de objetos)
741Página

de OPUDDE
Propiesladw dele ccour~
e No chillen., la carmálacidn edema
O Coneokn EeryPert chonta
H.bilio bdter de
O Srcsonho emaiel y salde:
7k, Malo OPC
/Mai. búto de en.o,
O McdoDDE
5,40x ,F.1,51MP
'15P..."T"-- Moda di drecch~oFPC
1 Cancdo
Figura 2.7.1-5. Modo OPC.
2.7.1.1.1 Descripción OPC.
Un servidor OPC es un (driver) que cumple con Diferentes especificaciones definidas;
utilizando sus protocolo nativos (típicamente PLCs, Modulos I/O, controladores, etc.) y por
el otro lado con Clientes OPC (típicamente SCADAs, HM1s, generadores de informes,
generadores de gráficos, aplicaciones de cálculos, etc.). En una arquitectura Tanto Cliente
como Servidor, el Servidor OPC es el esclavo mientras que el Cliente OPC es el maestro. Las
comunicaciones entre ellos son bidireccionales, lo que significa que los Clientes pueden leer y
escribir en los dispositivos a través del Servidor.
Para hacer uso de PLC, se deben insertar módulos de entradas y salidas al circuito de control. Se
debe buscar y arrastrar al área de trabajo los módulos, como se muestra en la siguiente figura.
11111121111GICILIO
Figura 2.7.1-6. Módulos de entradas y salidas de FluidSim a PLC.
Luego de agregar los módulos se procede a conectar los sensores o finales de carrera a las
entradas y los solenoides de las electroválvulas a las salidas.
Una vez que se tienen configurados los circuitos de fuerza y de control para el PLC, se deben
configurar los puertos de entradas y salidas de FluidSim, para esto se debe hacer doble clic sobre
el puerto a configurar, el sistema desplegará una ventana como la de la figura 2.7.1-7.
75 1 Página
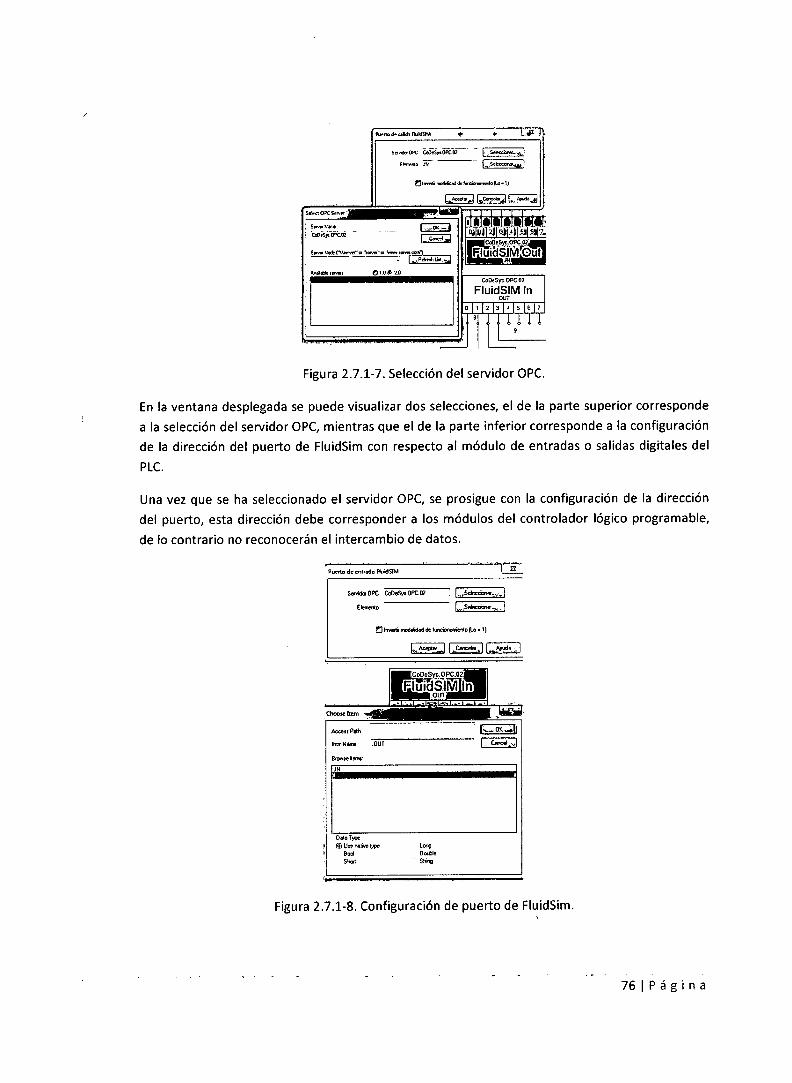
.sdeeemy.. Servoid OPC CoDe50.0PCO2
Elware .26
n,ded.FídIM
crotteklad de fv.K...c.otio .11
I- ~.41
CoDeSy5.OPC.02
FluidSIM In Out
OPC •
6 131,161 O 1 12 17
1•11 e 01 3174
CODeS OPC 02
FluidSIM Out
Figura 2.7.1-7. Selección del servidor OPC.
En la ventana desplegada se puede visualizar dos selecciones, el de la parte superior corresponde
a la selección del servidor OPC, mientras que el de la parte inferior corresponde a la configuración
de la dirección del puerto de FluidSim con respecto al módulo de entradas o salidas digitales del
PLC.
Una vez que se ha seleccionado el servidor OPC, se prosigue con la configuración de la dirección
del puerto, esta dirección debe corresponder a los módulos del controlador lógico programable,
de lo contrario no reconocerán el intercambio de datos.
Puerto de entrada FluliSITA
Choose Itero
Mons Pelh
Iton Neme .OUT 11=1
Brome Rems:
Dele Type IP) Use nal+e type Long
Pool Dable Short Sting
Figura 2.7.1-8. Configuración de puerto de FluidSim.
761Página

ti • t cl t-i74 ot o -
3 "xp
O 09 001
009
oil 00.
001 000
000
1 I Mi- baeubtrow ,.
..»10.1141.0-1,111 tew, j 11.7r • Certntle.,~
EtIE
k, A.,...
l
e....aco.h.b....9 N.Mr« mem,' .i......th. c...., .t.,..haerry..••4...ren ...eltr..n.
t..
.•.,,G,..r.
....
~f.. Netetivdrma
,
voltt Fan -•-3 E 1• t
3t
-
1(1/2
E
31:147 MY.
-•-11-•—•-3f— MCI 'rnanjr°100rn-4,'
Con este ejemplo se pueden adquirir los conocimientos necesarios para la configuración de los
circuitos de control por PLC y de fuerza en FluidSim, para la simulación de procesos
electroneumáticos mediante la integración de software.
2.7.2 Automation Studio 5.0.
Automation Studio está hecho especialmente para ingenieros y especialistas en neumática,
eléctrica y automatización. Ofrece una combinación de herramientas amigables para el diseño de
sistemas en un ambiente de trabajo común; ofrece funciones ingenieriles avanzadas; una
simulación realista y dinámica; herramientas de animación. Permite a usuarios finales
optimizar el desarrollo, la implementación y el mantenimiento de sistemas.
Es un programa de diseño, animación y simulación. Las simulaciones reflejan procesos reales
industriales. Posee tres componentes: un editor de esquemas, un explorador de proyectos y un
explorador de bibliotecas. El primero permite realizar esquemas de simulación, el segundo ofrece
las funciones principales de gestión y clasificación de todo documento relacionado con un
esquema y el tercero provee bibliotecas de símbolos que sirven para realizar los esquemas de los
proyectos.
Figura 2.7.2-1. Elementos de la ventana del editor.
En las bibliotecas puede encontrar una extensa gama de símbolos tales como bombas,
motores, válvulas de alivio, direccionales, componentes mecánicos, instrumentos de medida,
de acondicionamiento, transductores, etc. Los componentes se han agrupado por función
para facilitar la navegación.
Las bibliotecas incluyen símbolos y modelos de simulación integrados conforme a ISO' 1219-
1 para los símbolos y conforme a 1219-2 para la gestión del circuito.
77 1Página

>11 "Iir.«111"11111 W.41kwr N.
I..m, 1
r tark.Sr* I., erIttrI V....1:~ ,
+nado PF.
0,11, 1,0
4,
Figura 2.7.2-2. Biblioteca de componentes.
Automation Studio tiene las siguientes funciones de diseño:
Durante la simulación, los componentes se animan y las líneas cambian de color según
su estado. La velocidad de simulación puede igualmente ajustarse en modo Normal, Paso-
a-Paso, Cámara Lenta y Pausa.
El usuario puede asignar datos a cada componente de un proyecto para generar lista de
materiales.
Las bibliotecas Automation Studio ofrece diferentes componentes genéricos
estructurados por categorías de manera amigable conforme a numerosas normas
internacionales ISO, IEC, JIC y NEMA.
Información detallada se puede mostrar directamente en el diagrama o en
infoburbujas al sobrevolar un componente en pantalla.
El módulo de dimensionamiento de componentes provee cálculos de ingeniería
asistidos por computador.
La utilización de esta herramienta para visualizar, monitorear y simular el comportamiento de
un sistema real representa una ventaja importante para comprender mejor su funcionamiento y
las técnicas de reparación.
Automation Studio permite realizar configuraciones para las posiciones de una válvula direccional
hidráulica o neumática. En el caso que no encuentre la configuración deseada, esta herramienta le
permite crear la configuración y guardarla para uso futuro. El configurador de posiciones de
válvulas incluye todas las herramientas esquemáticas necesarias para crear un circuito al interior
de una posición de una válvula direccional.
78 ¡Página
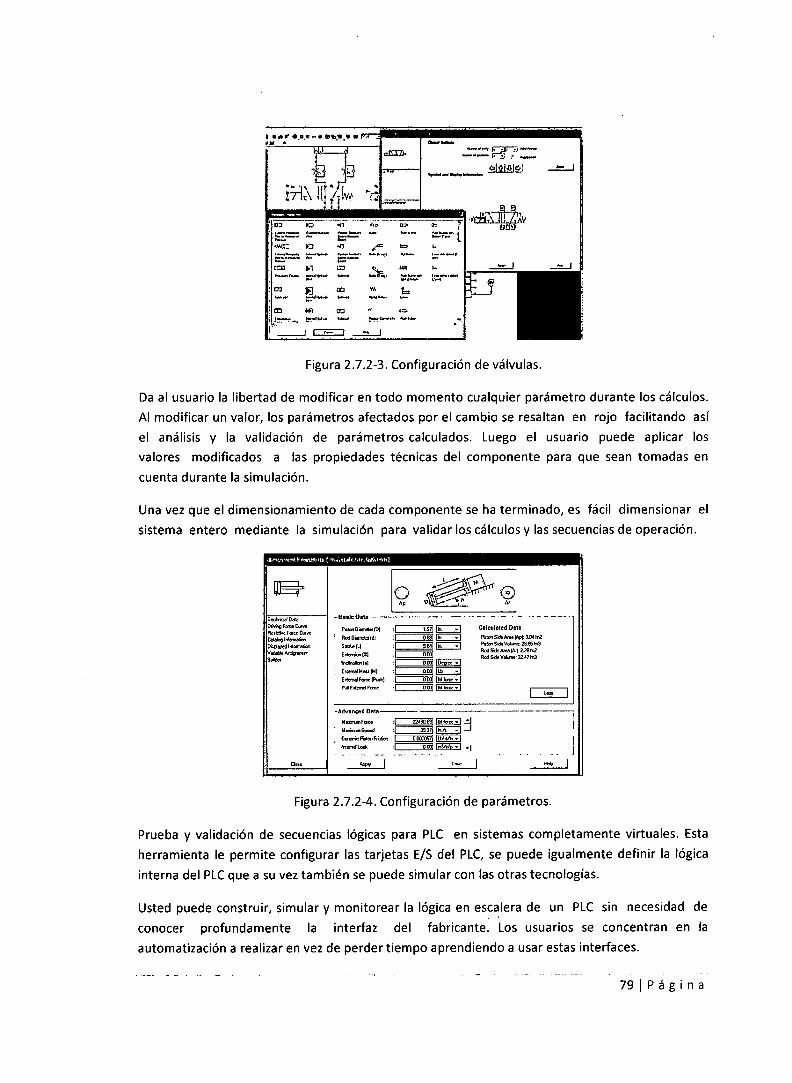
44•1,1•1r.04,t1~1 .4...í.,11.40.".1*(.0,1,1,1
Figura 2.7.2-3. Configuración de válvulas.
Da al usuario la libertad de modificar en todo momento cualquier parámetro durante los cálculos.
Al modificar un valor, los parámetros afectados por el cambio se resaltan en rojo facilitando así
el análisis y la validación de parámetros calculados. Luego el usuario puede aplicar los
valores modificados a las propiedades técnicas del componente para que sean tomadas en
cuenta durante la simulación.
Una vez que el dimensionamiento de cada componente se ha terminado, es fácil dimensionar el
sistema entero mediante la simulación para validar los cálculos y las secuencias de operación.
leichriud Dala Disirep Feo. Fletistive %te tuve CablegWoreation DisoltyedIrlonne6on
Antment uldel
P.mn DimM (01
Red blande Idl
5.1.
E Inenim R1
Incir~
Dome4141)
Demi Fme (Pulh)
PA Extand Force
Catculated Data
Frnban Skle Atea 1.14/1 3.1111:12 FIttere Vc4ra 29.95 1n3 Rod Sich Anse 144 2.281r2 RdS&Vr.2Z47fr3
1.971 I=
osa] Pa .1
Sttal 11]. .1
pool
Deo] [oeste. -1
neo] lut -t oca] lia ivet .1 O 00I 1
1L 1
Advanced Data
blecirkanFooe
Dynerric Pidan fá-lim
Intemei Led. :1
22031391 lb Ictee • I .1
371 0.0X1:671 iln •
001 - I ,I
Figura 2.7.2-4. Configuración de parámetros.
Prueba y validación de secuencias lógicas para PLC en sistemas completamente virtuales. Esta
herramienta le permite configurar las tarjetas E/S del PLC, se puede igualmente definir la lógica
interna del PLC que a su vez también se puede simular con las otras tecnologías.
Usted puede construir, simular y monitorear la lógica en escalera de un PLC sin necesidad de
conocer profundamente la interfaz del fabricante. Los usuarios se concentran en la
automatización a realizar en vez de perder tiempo aprendiendo a usar estas interfaces.
79 1Página

len. un* La. 1,ers .••••••
ebe• e 4.46'0 4. 0 .9 **le • • 7, oult k ei r> ur • 01
ralo 014
, 9 Y
e 5•••••••••1,... y th...•,.••••••1,11,11•••••••4 ,•••••••fiett•
RE16.
TON Time, ON-Detey Tener 121 Time Bese 1s Presel 5 AcCUM
11101.0,1 no
• C - CTU
Count UP - Ccsseer C.51 Presse
r3 eu••••10••• le••••••161*
-Pe-
f•••••• ••••••••-••••• s
7,
Figura 2.7.2-5. Programación de PLC.
2.7.3 CODESYS V2.3.
Codesys es un paquete de software que sirve como herramienta de programación para los PLCs
más comunes. Permite programar autómatas de diferentes fabricantes y se trata de un software
de programación abierto. Es un sistema que viene normalizado por la norma IEC 61131-3 este es
un software de programación abierto que se pretende estandarizar para la utilización en cualquier
marca de PLCs; cuya inversión fue sustentada por 7 multinacionales con alto nivel de experiencia
en sistemas de control; dicha norma está constituida por dos partes fundamentales que son
elementos comunes y lenguajes de programación. Los elementos comunes se refieren a datos
(referente al tipo de variable con la cual se va a trabajar) y variables (nos permiten indicar una
dirección física para cada una de nuestras variable de entrada y salidas) Con esto se pretende
eliminar la fidelidad a una sola marca y disminuir el negocio que han venido desarrollando las
diferentes empresas que fabrican PLCs, en cuanto al software específico para este, y permitir la
disponibilidad de otras opciones de control para el desarrollo de proyectos en automatización. En
si la norma IEC 61131-3 está enfocada directamente en la programación de PLCs
independientemente de la marca que este sea.
En este apartado se dan los pasos básicos para la configuración y uso del software CoDeSyS V2.3.
2.7.3.1 Creación del proyecto.
Dar click en el menú "Archivo" luego en la opción "Nuevo", aparece un cuadro de dialogo para la
"configuración del sistema de destino"; como el proyecto solo se basa en la simulación, este y
otros tópicos no se trataran. Retomando se selecciona "None", es decir ninguno o sin formato, se
muestra la ventana de "Nuevo Módulo" en ésta ventana se le da el nombre, es de acotar que este
siempre deberá ser "PLC_PRG" por ser el primero de nuestro proyecto. Además se define el "Tipo
de módulo", ya sea programa, función o bloque de funciones, por defecto se encuentra
seleccionado: programa. El tipo de lenguaje también se configura en ésta ventana; se
80IPágina

r Cd.t Propect Ion or Oráne
elel*In151111
Co./ aun - IM Web, SP FiCV4.41 V:GI i ..„. pi,,, I mum Gerad I N.a* I~By 1 Vsuele.on l
1 1/10;r19.din- A C,4 ;oto, r Dowdoal ea fin
r No eMen check 1 P Sum amen'. v o 'l'AM...N; W DowrissA mt.:111e r si,* laskil rra.a0in r 5~ te.ft from INI lb r h.. adcbtfibi..de A PLC Braelto A ,_....O G 1...
P ~Oen, r 4,k .•1...ri.. ,no,r,
r Upd..1.11/0•
Figura 2.7.3.1-1. Configuración de parámetros iniciales.
rnrcdpes>,- (Untitlee Ertit Project truene Extras %line Watt:~
1)11E1 K1101»prib1a1ll
Narne of Ove neer POU:
- Tyne oí POU
P Program
C Rrction Block
r Funceon %han Type: 180 DL 1
P VAP 01 .T
P P Loba tea nolo ~de r sallown rnnr.c r
encuentran: Lista de Instrucciones (IL), Texto estructurado (ST), Escalera (LD), Diagrama de
bloques funcionales (FBD), Gráfico funcional secuencial (SFC),Grafico continuo de funciones
(CFC).
En esta parte se explica la creación de simulaciones para PLC usando el lenguaje Ladder, para esto
se selecciona LO como se muestra en la imagen siguiente.
FIGURA 2.7.3.1-2. Configuración de lenguaje de programación a usar.
2.7.3.2 Reconocimiento del entorno
El entorno de CoDeSys se aprecia en la siguiente figura, este consta del objeto y el organizador de
objetos, el objeto o POU (unidad organizativa del programa) está compuesto por la declaración,
esta siempre es en editor de texto; y el cuerpo que es el programa en sí, que se realiza en el editor
para este caso el editor es ladder. POUs comprende tanto funciones como bloques de funciones
y programas, los cuales pueden ser complementados por acciones. La sección del cuadro rojo
representa los contactos y bobinas del leguaje ladder a usar en la programación.
81 1Página
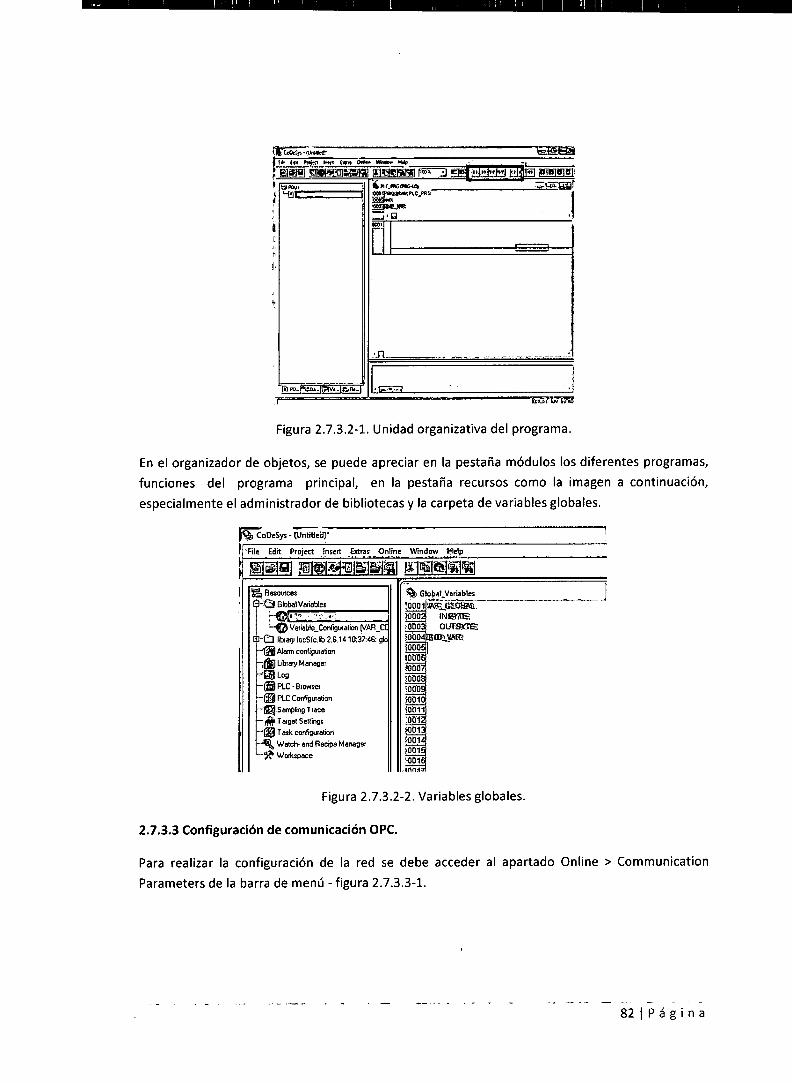
1:412441 fa, u.Pnfro hm, hito Orbrh
EiLi inewerhim1AI1uPT-3IMI2M11 ric."~-4 ZsW1-4
)4~PLC_hfiC
Ote
' e
wat
Fila Edit Project Insert Extras Online Window Melp
MID11 "it#G1515111 NivIWT14
Variable Configuration (VAR_ tibray lecSfc.111) 2.6.14 113.7:46: glo
-5 Alarm configuration lloraty Manager Log
— r1 PLC • Browser —13 PLC Confrguration
Sarrmfing Trace —0 l'argot Settings
Tad( configuration Watch• and Recipe Manager
-91 work:pace
/19 Global_Variables 1-000111—kkestleanl. 1100 INISITM 000 OU TE O 11P wwn
1000 1100 11000 IC100
,C11 snrs
004
Figura 2.7.3.2-1. Unidad organizativa del programa.
En el organizador de objetos, se puede apreciar en la pestaña módulos los diferentes programas,
funciones del programa principal, en la pestaña recursos como la imagen a continuación,
especialmente el administrador de bibliotecas y la carpeta de variables globales.
WciDeSys - (Untitledr 1
Figura 2.7.3.2-2. Variables globales.
2.7.3.3 Configuración de comunicación OPC.
Para realizar la configuración de la red se debe acceder al apartado Online > Communication
Parameters de la barra de menú - figura 2.7.3.3-1.
82 1Página

CofteSyt - WeglIedr
Pood Unen bates
talgg Inownal repte
Logout A" lird071 E10-;1«1011.10•1•1, col-lo
Doweload
Run
Stop
Reset
P.elet (cola)
Reset (ongonaff
!repele Rteoepoint FI
Ircolpaint Diatop
Step over no
Step In
FI
Single [pele Cut- F5
Verte Vetee; Ct147
Fent Vetees FI
Raerle Feto, Shift-F7
WrrtelForcup)tio CoI.51dft.F7
Sha« CaIl Sud-
Display How Coneol
Stenuletice Modo
ConnwaicationPEremeen..
Sol/necear doertleod
[repte boca moled
Vette Re fa PSC
Ferd %e frote PLC
SECUEIICII tu
—PROG1
rOVFITÉ.W
F5
10.10. 00
el PIM:
4 sEalcucv, (MG)
2 P1-1 " lee
OK 1 Neme IFLUI05114
Cancel Device
CANopen DSP302 ASI ControIN Seda5232 Roa
SNiá P15132I ILeve12 Route) Shared rnernory (Korne5 Modem (135332) (Level 2 RoJte)
300 CANcpen CISPX 35,151CW:redor 35 Serial R5232 Rre,_ 3S Tcoilp Leve! 2 131 35 R5232 Level2 35 5h:wad rnemory 35 Modem Level 2 F -
e
Getray
Update 1
Figura 2.7.3.3-1. Parámetros de comunicación.
A continuación aparecerá el siguiente cuadro de diálogo - Figura 2.7.3.3-2.
CoDeSys - (Urst)tlee J
File E de Project Insert E.res Onüne Wmdcerr Melo
W121111151(iNe1lUti(1 /1111«11111 1110 JtÉ9 R711711
Communication PArneters POUe
LEO11~1111 El SECUENCIA (PRGI Charnett
8 :Local
Neme 1 Value Cornrrene
Commenication %remeten: :Nene Channel
O-171E FI-V RE1—.7,1)
Figura 2.7.3.3-2. Creación de canal de comunicación.
Seleccionando la opción New, se podrá configurar un nuevo canal de comunicaciones -
Figura 2.7.3.3-2. Como se enlaza con FluidSIM, agregaremos un canal de comunicación nuevo y
, asignaremos un nombre como FLUIDSIM, seleccionando tcp/ip (level 2 route), luego damos OK.
83 ¡Página
(2_3_

Nte Edtt Project Insert. basas Offline 1ffindow Ne4p
1l iOI1 flitienrig 1113 1111 R17111711"EEET 11*P-11111i
a Pl.,
B SECUENCIA (PRG
mntunioationIParameteN
Chancle!.
LJ
.Pnr, [Level 2 Red)
Adán: bulbos( IP «besa or holneene P.M 1203 Teepatld O Manda bytecedot No
Name 1 VM 1
Wasio‘ CommuNcation Parametesr Gateway
Co
PO re Da hP1Milt,Re 1
Connectire
~tau Ibeowg
Passvetecl
12-1. ---
Gatatay
UtxIe
PITC—m frW,E
1 OK 1
Al validar el nuevo canal aparecerá la configuración de la siguiente manera Figura 2.7.3.3-3,
debemos asegurarnos de que en la configuración del gateway la conexión sea LOCAL.
CoDeSys - (Untitkar
Figura 2.7.3.3-3. Configuración de canal de comunicación.
Después abrimos el configurador OPC del CODESYS y seleccionamos la opción mostrada.
tb. o.;;;rig Ed
OPan Strg.0 Save Strg•S New Strg*N
Single PLC
Import..
E'PcIrL.•
Last Fale
Settitga lar OPC Selva
Uodate Roto (mg 213111
evlsk Group,: r hm In&
Lag Everts, r
Figura 2.7.3.3-4. Configurador de comunicación OPC.
841Página
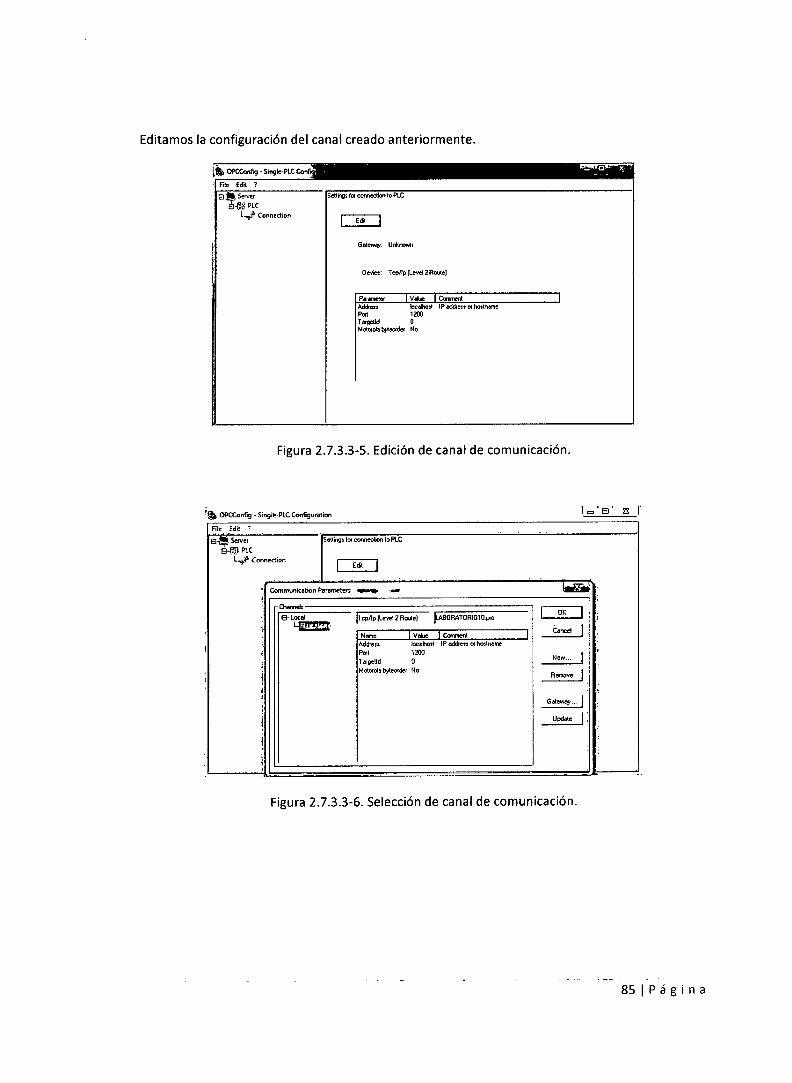
Figura 2.7.3.3-5. Edición de canal de comunicación.
OPCContig - Single-PLC Configuration
PO Edit
Sever
PLC L-40 Connection
ergs ccnnecton to PLC
E6á
Editamos la configuración del canal creado anteriormente.
Communicatbn %remeten ~mg> ~e
Chennels
El- Local T 2 Route) ILABORATORIOlapo OK
cp/Ip [Level
1=1' Name 1 Vote 1 Gement 1
ancel
Meres: localtwat IP addrese e: hostneme Pot! 1200 Tatgetld O New ...
Mototole bytecnder No Remove
Gateway ...
Update
Figura 2.7.3.3-6. Selección de canal de comunicación.
851.Página

.Messages
Project Info -- Program N árrre = LABORATOR1010.pro Date = 18.7.15 22:57:31 Version = Author =
[Program Loaded1
119177—
[ State
IRUNNING
TCPIP-Settings I IP-Address 192.168.1,41, PO 1200
RS232-Settings IC0M1, 115200 Bd, 1 StopBit, NO Parity
Stop I Reset I Tallts;. Shütdown I
Ahora configuramos el PLC virtual que se conecta a FluidSIM, como es un demo su funcionamiento
está limitado a dos horas. Solo abrimos el PLC y desde CODESYS le enviamos el programa, con esto
queda todo listo para su correcto funcionamiento junto a FluidSIM.
1
— - :PLCWiniff V2.4.7.47 BuilaNlán920151DEMQ) . _
Figura 2.7.3.3-7. PLC virtual.
41, CoDeSys - tAiORATOR1010sor0• WInlae~
Windosv Held
Login FS
Logout Ctr1.4
Download
Ron F5
Stop Shift-F8
Reset
Reset (cold)
Reset (original)
Toggle 8reakpoInt
Ilreakpoint Dialog
Step over FIO
Step in F8
Single Cycle Ctd.Fs
Write Values Ctrt.F7
Force Values F7
Release Forre Shift,F7
Write/Force-Dialog Ctr1.5hift.F7
Show Cali StecL,
Display Flow Control
Sirnulation Mode
Communication Pararneters..
Sourcecode dowriload
Lega atto the torpel system and
Frotagyammi
Ei SECUENCIA (RDRI
Croata boot project
si Write Meto PLC
Read (de (roas PLC fr-PTIFIP7 Rerr-o
Figura 2.7.3.3-8. Cargar programación en PLC virtual.
86 1Página
CAPÍTULO III
3.- DISEÑO DEL MODULO ELECTRONEUMATICO
3.1 Estudio de factibilidad.
Esta es una de las actividades más importantes para determinar y verificar si el módulo es factible
o viable desde todas las perspectivas posibles. El estudio de factibilidad debe analizarse de
acuerdo a: Factibilidad Técnica, Factibilidad Operativa, Factibilidad Económica.
3.1.1 Factibilidad técnica.
Se evaluará si los requerimientos tecnológicos determinados para el desarrollo de este trabajo de
investigación se encuentran disponibles y al alcance del investigador. En este apartado
analizaremos lo que se requiere para el desarrollo del módulo en cuanto a software.
Para determinar la factibilidad técnica se deben analizar:
Tecnología y solución propuesta.
Disposición de la tecnología.
Conocimientos técnicos.
3.1.1.1 Tecnología y solución propuesta
Las tecnologías de software necesarias para el desarrollo módulo son las siguientes:
Windows XP Mode
Windows Virtual PC
Automation Studio 5.0
FluidSIM Neumática 4.5
CODESYS V3.5
El hardware requerido para la implementación del módulo y poder utilizar estos software
sin problemas requiere tener un sistema con las siguientes características como mínimo:
Pentium II, 500 MHz
128 MB RAM
2 GB de espacio de disco duro disponible
CD ROM drive
Para cada una de las áreas mostradas se tienen varias propuestas y alternativas que están
disponibles en el mercado actual de software y el laboratorio de la escuela cuenta con las
maquinas con los requisitos hardware necesario.
87 ¡Página
3.1.1.2 Disponibilidad de la tecnología.
En este apartado se analizó la tecnología software que se requiere para el diseño y simulación del
módulo. Algunas de las alternativas de software son de tipo comercial (Automation Studio) y de
código libre (Windows XP Mode, Windows Virtual PC, CODESYS V3.5, FluidSIM Neumática 4.5),
estos son utilizados en el desarrollo del módulo.
3.1.1.3 Conocimientos técnicos.
Además de contar con la tecnología necesaria se requiere contar con conocimientos técnicos para
la correcta utilización de la misma. En el caso del software, el desarrolladores del módulo tiene
conocimiento de las alternativas de software mencionadas, en algunos casos no se trata de
conocimientos profundos pero si suficientes para el manejo de las mismas. Al hacer un análisis de
lo anterior, se logra concluir que el proyecto es factible técnicamente.
3.1.2 Factibilidad operativa.
Se evaluará la realización de todos los aspectos conceptuales relacionados con el tema de
investigación. Para determinar si el módulo propuesto tiene viabilidad operativa, se deben tener
en cuenta algunos aspectos como:
Solución de la problemática planteada.
Al analizar la problemática planteada, se observa que el módulo es funcional para la Escuela de
Ingeniería Electrónica y Telecomunicaciones, pues tiene como objetivo permitir a los alumnos de
la Escuela fortalecer conocimientos en el área de automatización industrial. Se puede determinar
que es factible operativamente, porque todo en general muestra disponibilidad completa para la
realización del módulo.
3.1.3 Factibilidad económica.
El presupuesto formulado en el trabajo de investigación será solventado con recursos propios del
investigador.
La factibilidad económica del proyecto se mencionará en las especificaciones de costos totales del
módulo. Aunque se puede decir que es factible económicamente porque se cuenta con la mayoría
de las herramientas, conocimiento y disponibilidad para llevar a cabo dicho módulo, el costo es
mínimo debido a que algunas de las herramientas de desarrollo son de distribución libre.
Costos de licencia de software.
Automation Studio 5.0 tiene un precio de $70.00, la versión más reciente del software se puede
conseguir de fittiwiiÑo~auttmialkffisliutitoacurü.
CODESYS V3.5 está disponible para descargar desde fittimilkiwYwoachIsmsscconi/ sólo debe
registrarse en la página.
88 'Página

Windows XP Mode y Windows Virtual PC están disponibles para descargar desde
htt//windov,n,microsoftscorni de manera gratuita.
FluidSIM Neumática 4.5 está disponible para descargar desde http:Oweffeoiltuidsiim.dej de manera
gratuita.
3.2 Diseño del módulo.
De acuerdo a la investigación realizada para resolver secuencias de automatización
electroneumática con diferentes métodos se llevará a cabo el desarrollo del módulo. El módulo
está diseñado para que el estudiante obtenga un conocimiento gradual y profundo de los
temas más relevantes del área de electroneumática. El valor práctico del módulo radica en la
capacidad que tendrá el alumno para la resolución de problemas de diseño electroneumático
utilizando diferentes software para aprendizaje, simulación y comprobación. Cada práctica está
formada por diferentes elementos que facilitan la comprensión y asimilación de los conceptos
teóricos impartidos con anterioridad.
3.2.1 Desarrollo de prácticas de laboratorio.
3.2.1.1 Laboratorio I.
3.2.1.1.1 Título.
SECUENCIA A+, C+, B+, A -, C-, B-, UTILIZANDO EL METODO ESTADO-FASE
3.2.1.1.2 Objetivos.
Identificar los elementos y las herramientas neumáticas para realizar los movimientos de
la secuencia requerida.
Interpretar un diagrama de estado-fase.
Detectar problemas de cruce de señales.
Realizar la simulación de la secuencia A+, C+, B+, A-, C-, B-.
Analizar el funcionamiento del circuito formado por tres cilindros neumáticos de doble
efecto, utilizando válvulas 5/2 con pilotaje neumático.
3.2.1.1.3 Materiales.
Software FluidSIM Neumática
Cilindro de doble efecto (3)
Válvula biestable 5/2 (3)
Final de carrera válvula 3/2 accionamiento mecánico y retorno por muelle (6)
Válvula 3/2 accionamiento mecánico (1)
Alimentación Neumática
Silenciadores (12)
Válvula reguladora de caudal (6)
89 ¡Página

3.2.1.1.4 Procedimiento.
Configurar y conectar los elementos del circuito de control.
Desarrollar el circuito de control en FluidSIM.
Ejecutar la simulación y verificar su funcionamiento.
Realizar las conclusiones de la práctica.
3.2.1.1.5 Descripción.
La secuencia que se quiere diseñar posee 6 fases y se obtendrá a partir de diagrama de estado-
fase y diagrama de señales de la figura 3.2.1.1-3 y 3.2.1.1-4. El primer movimiento lo realiza el
actuador A pasando el vástago a su posición máxima (representado como una línea ascendente en
el diagrama de estado-fase figura 3.2.1.1-3). Tanto el cilindro B como C no realizan ningún
movimiento en esta fase (línea horizontal figura 3.2.1.1-3). Ya que en la segunda fase el cilindro C
se extiende (línea ascendente), entonces la fase uno provocó el accionamiento del final de carrera
cO. En la fase dos los cilindros A y B no realizan movimientos (líneas horizontales). En la fase tres el
cilindro B se extiende (línea ascendente), se deduce que en la fase anterior se accionó al sensor b0
para que así cambie de estado. La fase cuatro sólo el cilindro A se mueve y su vástago regresa a su
posición de reposo (línea descendente) lo que indica que en la fase anterior se accionó al sensor
al como se ve en el diagrama de estado-fase. La fase cinco sólo el cilindro C se mueve y se
contrae, como se ve en la figura 3.2.1.1-3, lo que indica que el cilindro A en la fase anterior al
regresar activo al sensor cO. La última fase consiste en el retorno del cilindro B (línea
descendente), por lo tanto el retorno de C activo al sensor bl.
Con esta descripción podemos ubicar los sensores, pues la extensión y contracción de los vástagos
y los respectivos sensores que estos activan ya fue explicado. A continuación se muestra la
ubicación de cada sensor en los cilindros con ayuda del diagrama de estado-fase.
Figura 3.2.1.1-1. Distribución de los finales de carrera.
00 wízi M •
bl CO cl
Figura 3.2.1.1-1. Accionamiento de las válvulas.
90 ¡Página
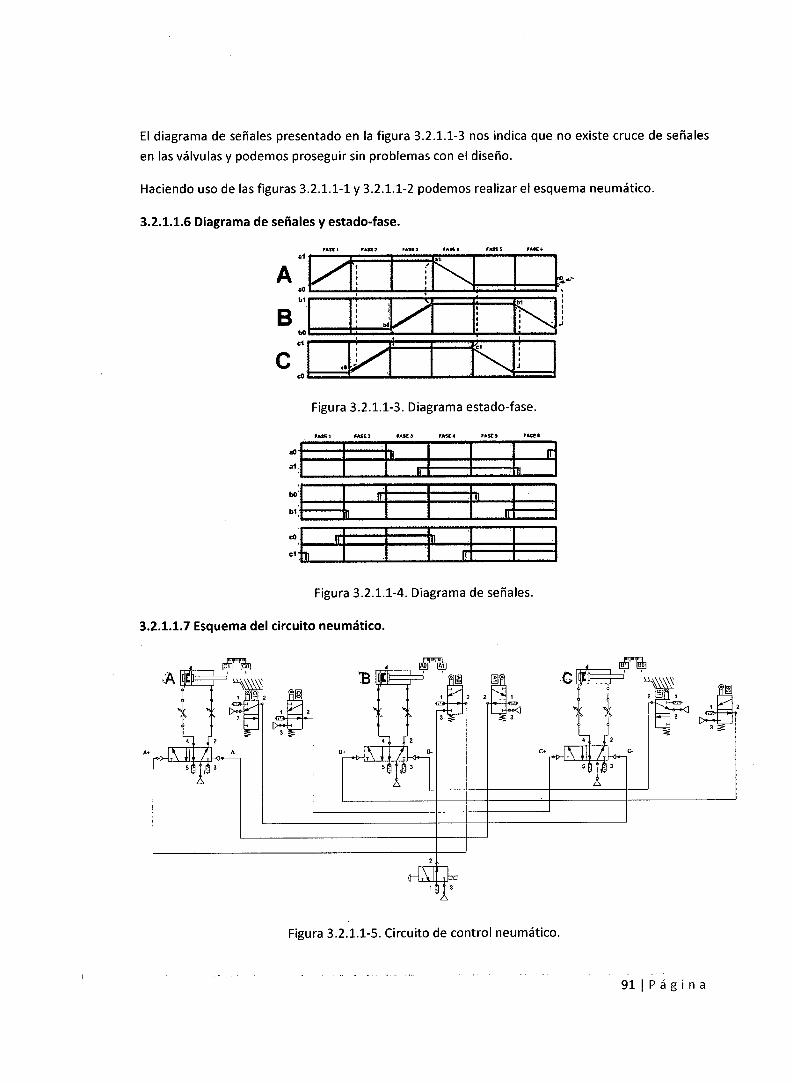
2
3
El diagrama de señales presentado en la figura 3.2.1.1-3 nos indica que no existe cruce de señales
en las válvulas y podemos proseguir sin problemas con el diseño.
Haciendo uso de las figuras 3.2.1.1-1 y 3.2.1.1-2 podemos realizar el esquema neumático.
3.2.1.1.6 Diagrama de señales y estado-fase.
1,25f 1
00000/". al
[
/ I
i
I I I
Y 4 I I 4
hl
I I
'd1
I I 4 I. .
<11
Ir 20.00,
'
0
',
4 Cl !
i N .
,
; _
Figura 3.2.1.1-3. Diagrama estado-fase.
FASE 2 PASE 3 FASE. 5*554 VAS&
ti
fil
rL
Figura 3.2.1.1-4. Diagrama de señales.
3.2.1.1.7 Esquema del circuito neumático.
17"1
\V 2 MEI 2
3
3
A. A-
A 2
3
2
e
•
171
\
co .
el
2
3
`X.
1
Figura 3.2.1.1-5. Circuito de control neumático.
91 1Página

3.2.1.1.8 Simulación en FluidSIM.
A+/C+/B+/A-/C8
Figura 3.2.1.1-6. Simulación del circuito.
3.2.1.1.9 Conclusiones.
La representación gráfica de la secuencia neumática es el diagrama de estado-fase.
Es recomendable emplear otros métodos cuanto más compleja sea la secuencia.
El diagrama espacio-fase es adecuado para representar ciclos secuenciales en los que
el tiempo no interviene o no tiene prácticamente importancia.
3.2.1.1.10 Cuestionario.
¿Para qué usamos el diagrama de señales?
El diagrama de señales permite verificar que no existan señales dobles en las válvulas.
¿Puede usarse este método para secuencias con mayor complejidad?
Si, aunque sería más complicado y trabajoso evitar el cruce de señales.
92 1Página

3.2.1.2 Laboratorio II.
3.2.1.2.1 Título.
SECUENCIA A+, 8+, A-, 8-, C+, C-, UTILIZANDO EL METODO CASCADA
3.2.1.2.2 Objetivos.
Seleccionar los elementos neumáticos y electroneumáticos que sean requeridos para la
práctica.
Construir un circuito de control para realizar las acciones de los cilindros.
Analizar el funcionamiento del circuito de control para la secuencia deseada mediante el
software.
Demostrar el funcionamiento del método para resolver secuencias electroneumáticas.
3.2.1.2.3 Materiales.
Software FluidSIM Neumática
Cilindro de doble efecto (3)
Electroválvula biestable 5/2 (3)
Finales de carrera (6)
Alimentación Neumática
Silenciadores (6)
Válvula reguladora de caudal (6)
Solenoide (6)
Pulsador NA (1)
Relevadores (4)
3.2.1.2.4 Procedimiento.
Separar la secuencia en grupos como indica el método.
Desarrollar el circuito de control en FluidSIM.
Configurar el circuito de potencia en FluidSIM.
Conectar los elementos del circuito de control y potencia.
Ejecutar la simulación y verificar su funcionamiento.
Realizar las conclusiones de la práctica.
93 1Página

3.2.1.2.5 Descripción.
Los sensores conectados en serie a cada grupo son parte de la lógica de control. Desde la pantalla
principal de FluidSIM en el circuito de control pulsar botón de arranque (BA) este pulsador va a
activar al relé K1 que se enclava y energiza la bobina A+, provocando la salida del vástago de este
cilindro. La activación del grupo 2 ocurre cuando el sensor al es activado por la salida del vástago
del cilindro A. Al activarse el relé de este grupo y enclavarse da lugar a la siguiente acción que es la
salida del cilindro B y activación de bl. El captador bl al accionarse activa al solenoide A-, y el
cilindro A se contrae. El siguiente grupo será activado por los sensores a0 y bl del grupo anterior.
El grupo 3 hace regresar al cilindro B a su posición de reposo y activa a b0. El accionamiento de b0
activa al solenoide C+ y por consiguiente a cl. El último grupo no se enclava y realiza la acción de
que al activarse los sensores del grupo anterior b0 y cl desexcita al relé K3, y el sistema regresa a
sus condiciones iniciales.
TRANSXCIONES GRUPO RELÉ SOLENOIDE ACTIVA,FINAL OtCARRIRA
A+ I K1 A+ al
B+ A- II K2 B+ , A- bl,a0
8-C+ III K3 B-, C+ b0 , cl
C- IV K4 C- co
Figura 3.2.1.2-1. Cuadro de elementos del esquema.
GRUPO
1 A+ --II INACTIVO
II 8+ A•—i+ ACTIVO
II 8+ INACTIVO
r3 III —*-4 8- C+ --lb ACTIVO
IV --lb C. INACTIVO
I Al ACTIVO
Figura 3.2.1.2-2. Cuadro de activación.
La figura 3.2.1.2-1 muestra la separación de la secuencia en grupos, los relevadores a usar para
cada grupo, los lados de los solenoides activos en cada grupo y los finales de carrera de quien
depende la activación de los grupos. Esta figura nos ayuda a la construcción del circuito de control.
La figura 3.2.1.2-2 señala la activación y desactivación de los grupos en cada paso de la secuencia.
Nos ayuda a entender el sistema cascada del sistema.
94IPágina

IuIIIIIIIIq
BO B1 CO Cl PI IIIIiII II
AO Al
3.2.1.2.6 Esquema del circuito neumático.
Figura 3.2.1.2-3. Esquema del circuito neumático.
3.2.1.2.7 Circuito de control.
Figura 3.2.1.2-4. Esquema del circuito de control.
95 !Página
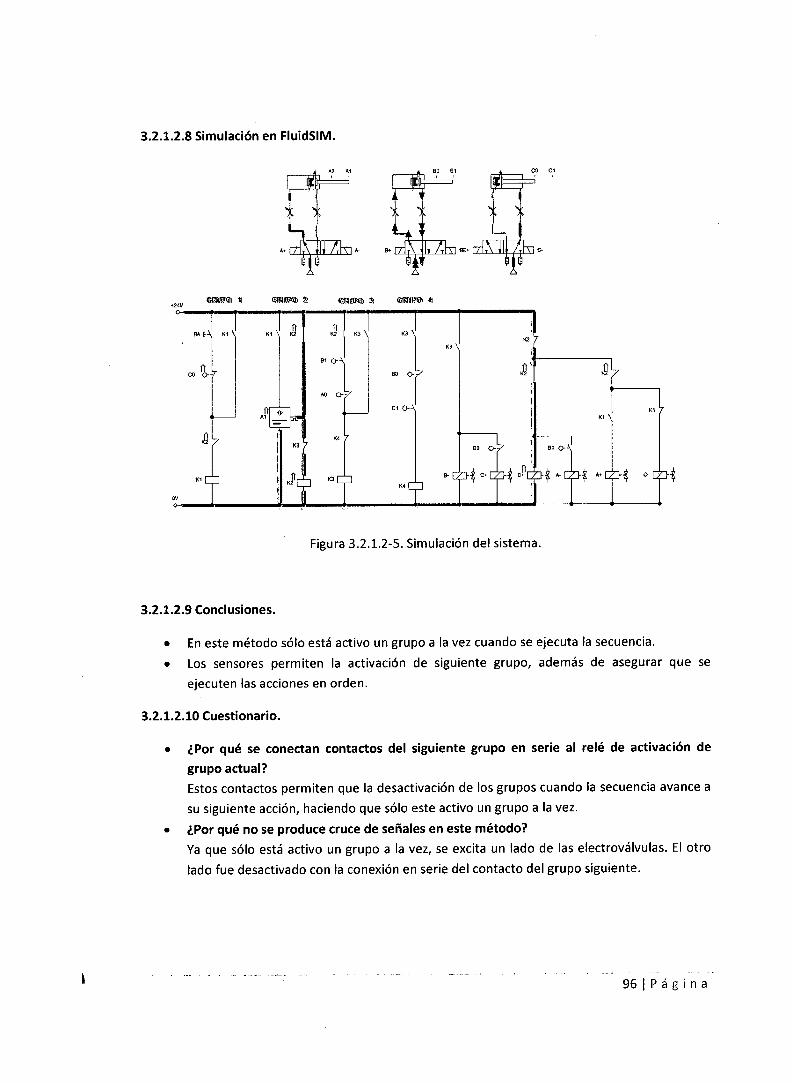
.24V GIRD11101 MOND (11F419M 0P~ 13
K1 \ K1 \
03 \
81 0-
K3
c- 1-71-1
3.2.1.2.8 Simulación en FluidSIM.
Figura 3.2.1.2-5. Simulación del sistema.
3.2.1.2.9 Conclusiones.
En este método sólo está activo un grupo a la vez cuando se ejecuta la secuencia.
Los sensores permiten la activación de siguiente grupo, además de asegurar que se
ejecuten las acciones en orden.
3.2.1.2.10 Cuestionario.
¿Por qué se conectan contactos del siguiente grupo en serie al relé de activación de
grupo actual?
Estos contactos permiten que la desactivación de los grupos cuando la secuencia avance a
su siguiente acción, haciendo que sólo este activo un grupo a la vez.
¿Por qué no se produce cruce de señales en este método?
Ya que sólo está activo un grupo a la vez, se excita un lado de las electroválvulas. El otro
lado fue desactivado con la conexión en serie del contacto del grupo siguiente.
96IPágina

3.2.1.3 Laboratorio III.
3.2.1.3.1 Título.
SECUENCIA A+, B+ C+, A-, C-, B- C+, C-, UTILIZANDO EL METODO PASO A PASO
3.2.1.3.2 Objetivos.
Identificar los elementos y las herramientas Electroneumáticas para realizar los
movimientos del sistema.
Diseñar los esquemas neumático y eléctrico para el funcionamiento de la secuencia.
Ejecutar la simulación de las acciones A+, B+ C+, A- , C- , B- C+, C-, de los cilindros
utilizando el método paso a paso.
Verificar el correcto funcionamiento de la secuencia deseada mediante el software.
3.2.1.3.3 Materiales.
Software Automation Studio
Cilindro de doble efecto (3)
Electroválvula biestable 5/2 (3)
Sensores de proximidad (6)
Alimentación Neumática
Válvula reguladora de caudal (6)
Solenoides (6)
Pulsador NA (1)
Relevadores (6)
3.2.1.3.4 Procedimiento.
Desarrollar el circuito de control en Automation Studio.
Configurar el circuito de potencia en Automation Studio.
Conectar los elementos del circuito de control y potencia.
Ejecutar la simulación y verificar su funcionamiento.
S. Realizar las conclusiones de la práctica.
3.2.1.3.5 Descripción.
El cuadro de la figura 3.2.1.3-1 nos permitirá construir el circuito de control de la secuencia, así
como también a entender su funcionamiento. Al pulsar el botón de arranque se energiza el
relevador K1 y activa el solenoide A+, resultando la extensión del cilindro A y el accionamiento de
Al. Al activarse Al, se excita el relé K2 rompiendo el enclave de K1 y activando el solenoide B+ y
C+. Se produce la salida del cilindro B y C como consecuencia de la fase anterior y activa el sensor
B1 y Cl. La tercera fase sucede cuando el relé K3 es excitado al activarse B1 y Cl.
I _
97 1Página

El relevador K3 rompe el enclave de K2 y activa el solenoide A-, accionando al sensor AO. La fase
cuatro excita al relé K4 y activa al solenoide C-. Al contraerse el vástago del cilindro C, activa al
sensor CO y da lugar a la fase cinco. La fase cinco activa al relé K5 y los solenoides B- y C+ con sus
respectivos sensores BO y C1 terminada la acción. Los sensores activados anteriormente provocan
que la fase seis active su relevador K6 que se encarga de hacer regresar el cilindro C.
FASE SECIIIIICIA ACTIVACIÓN 'Tase anIeriar,taptador etaseteiior RELIDÉIAC ACIÓN: grupg siguierp
1 A+ Fase 6, c0 K1 Fase 2
2 8+C+ Fase 1, a1 K2 Fase 3
3 A- Fase 2 , cl y bl K3 Fase 4
4 C- Fase 3 , a0 K4 Fase 5
5 B- C+ Fase 4, c0 K5 Fase 6
6 C- Fase 5 , b0 y cl K6 Fase 1
Figura 3.2.1.3-1. Cuadro de activación y desactivación de fase?;.
3.2.1.3.6 Esquema del circuito neumático.
AO Al
BO BI
Figura 3.2.1.3-2. Esquema del circuito neumático.
1
981Página
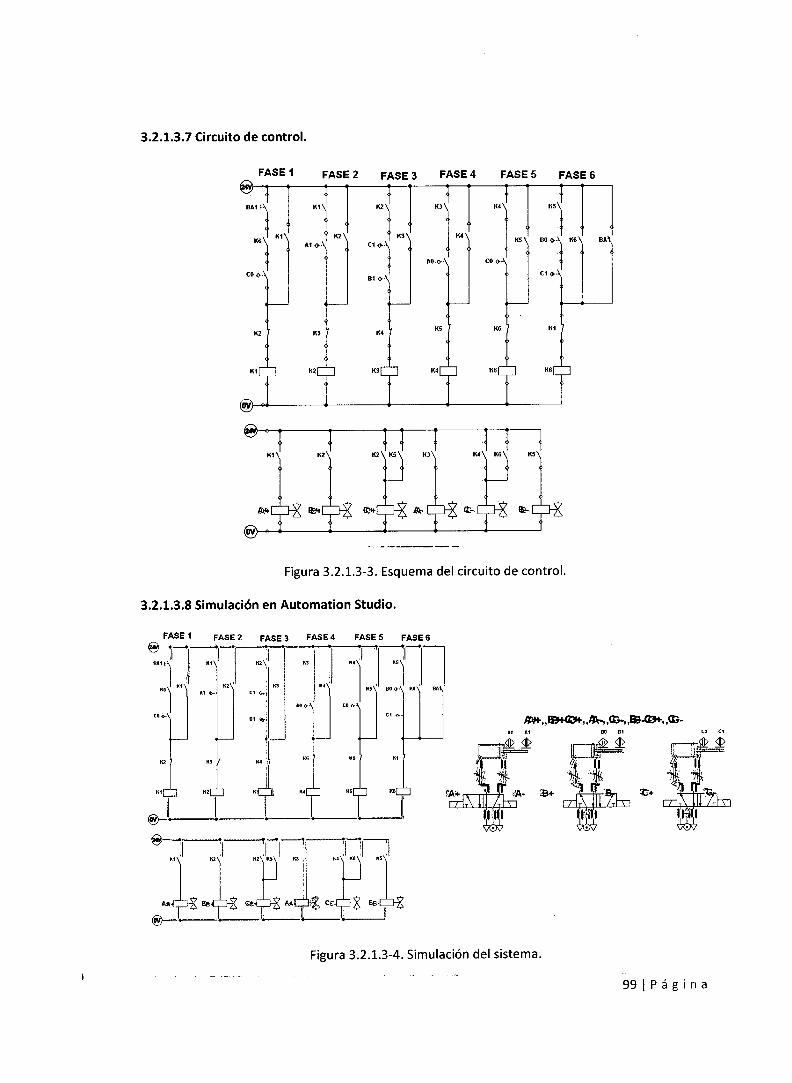
Ak- rAki
K5\
o
K4 \ M
O
I>
o
K3
o
o
Mélh„ 5344311-„Adr-„ir,„EiG-Ga+„Z AO Al 00 131 CO el
FASE 1
BA1 El
Al 156 o- 112 \ Cl
\ I 119 1151
FASE 2 FASE 3 FASE 4 FASE 5 FASE 6
Arrl+
11111
3.2.1.3.7 Circuito de control.
FASE 1
FASE 2 FASE 3 FASE 4
FASE 5 FASE 6 le, ;
BA1 E \
K6\
o
E1
-K1\
Al 0.
K3
K21
K2 \ ci
K2\
G.\
131 O.
K4
K a I
*
o
K3\
K3 1
AO 0-.\
o
K4\
----
M
CO o-
K6
1(51
K5
K5 \
BO O \
Cl 0.•
K1
1161
K6\ BA
K2
o
o
El 1
ralr o.
*-
/
1 1
o
KS
o
o
1 K41
O
/
1 1 1
Figura 3.2.1.3-3. Esquema del circuito de control.
3.2.1.3.8 Simulación en Automation Studio.
Figura 3.2.1.3-4. Simulación del sistema.
99 1Página

3.2.1.3.9 Conclusiones.
La aplicación de metodologías como el método paso a paso permiten que la secuencia de
operaciones se incremente sin dificultades.
La ventaja que representa el enclave es que de esta manera basta con dar un pulso para
enviar una señal eléctrica y no hace falta mantener presionado la señal de mando.
Una fase es activada por la fase anterior y desactivada por la siguiente asegurando que en
cada momento este activo solamente un relé.
3.2.1.3.10 Cuestionario.
¿Por qué se conectan contactos NC de los relés siguientes a la fase actual?
Se conectan en serie a las fases actuales para que en el siguiente paso se rompa el enclave
del relevador y se evite el cruce de señales en la electroválvula.
¿Qué función cumplen los sensores en la secuencia electroneumática?
Los sensores son los componentes del circuito encargados de enviar la señal eléctrica para
continuar con la siguiente fase de la secuencia.
¿Por qué se realizan los enclaves de relevadores?
El enclavamiento funciona como un circuito de memoria, que permite mantener un estado
aunque cese la acción que la produjo.
I 100 Página
3.2.1.4 Laboratorio IV.
3.2.1.4.1 Título.
SECUENCIA A+ B+, A-, B-, B+, A+ , A- B-, UTILIZANDO EL METODO SECUENCIAL
3.2.1.4.2 Objetivos.
Reconocer y seleccionar los elementos necesarios para el funcionamiento del
sistema.
Diseñar los esquemas neumático y eléctrico para la activación de dos cilindros de
doble efecto usando electroválvulas biestable 5/2.
Implementar y comprobar los esquemas neumáticos y eléctricos diseñados en un
simulador.
3.2.1.4.3 Materiales.
Software FluidSIM Neumática
Cilindro de doble efecto (2)
Electroválvula biestable 5/2 (2)
Finales de carrera (4)
Alimentación Neumática
Silenciadores (4)
Válvula reguladora de caudal (4)
Solenoide (4)
Pulsador NA (1)
Pulsador NC (1)
Relevadores (6)
3.2.1.4.4 Procedimiento.
Diseñar los esquemas de control neumático y eléctrico en FluidSIM.
Conectar los elementos del circuito de control y potencia.
Comprobar los esquemas neumáticos y eléctricos diseñados en un simulador.
Realizar las conclusiones de la práctica.
3.2.1.4.5 Descripción.
En condiciones iniciales C.I los cilindros de doble efecto A y B se encuentran retraídos. Iniciamos el
diseño conectando el botón de arranque BA en serie con el botón de paro BP y el relé a enclavar
El primer movimiento a realizar es la salida de los dos cilindros, esto se logra con el primer
enclave del relé K1 que excita la bobina A+ y B+. Al salir el vástago del cilindro A y B activan el
sensor Al y B1 respectivamente, estos provocan que salga el cilindro A regrese activando el relé
El relevador K2 excita el lado A- para que el cilindro regrese, no sin antes haber roto la
conexión que energiza la bobina A+ conectando un contacto NC de K2 en serie a ésta bobina. El
101 ¡Página

FASES CILINDRO A CILINDRO B SENSORES MOVIMIENTO
al , bl
al
CONDICIONES DE CAMBIO 1
B.
A.
2
3
4
5
ightlitnium Al Al BO 81
segundo movimiento es el retorno del cilindro A que activa al sensor AO y excita al relé K3. El
tercer paso es que el cilindro B regrese, entonces los contactos de K3 deben activar al solenoide B-
(contacto K3 NA) y desactivar al solenoide B+ (contacto K3 NC). El paso cuatro debe de extender el
vástago del cilindro B, la señal que activa éste paso es el regreso de B y por tanto activación del
sensor BO. Para que el cilindro B se extienda se debe desactivar el solenoide B- y activar el
solenoide B+ accionando así el sensor B1. El quinto paso lo activa el sensor B1 y consiste en que el
cilindro A se extienda, para esto conectamos en paralelo, al contacto que rompió anteriormente la
alimentación de la bobina A+, un contacto NA de K5. También debemos conectar un contacto NC
de K5 en el solenoide A- para romper el paso de energía y evitar señales dobles en la
electroválvula. El último paso es que los cilindros vuelvan a condiciones iniciales y se consigue
rompiendo el primer enclave, desactivando las bobinas positivas de los dos cilindros y excitando
las bobinas A- y B-.
Figura 3.2.1.4-1. Condiciones de cambio del sistema.
La figura 3.2.1.4-1 nos ayuda a entender los movimientos del sistema así como la activación de
solenoides y sensores en cada fase.
3.2.1.4.6 Esquema del circuito neumático.
Figura 3.2.1.4-2. Circuito de potencia neumático.
102 !Página

A- B.
+24V
3.2.1.4.7 Circuito de control.
+24V o.
Kl K1 KI Al O-- K2 AO K3 K3 so
fi C)--
K B1 0--- K M O—
B1 0.-
K5 K2 K4 K3 K6 K5 K4 K6
K5 K1 K4
, K6 K6
K6 ri KI A+ - 5+ - K2 A- - K3 - K4
OV O di
•
•
•
•
•
BA
BP
• •
Figura 3.2.1.4-3. Esquema del circuito de control.
3.2.1.4.8 Simulación en FluidSIM.
A+ B+ /A- / B-/ /A+ /A- B-
AO Al BO 61
Figura 3.2.1.4-4. Simulación del sistema.
103 1Pág1na
3.2.1.4.9 Conclusiones.
Para desactivar un solenoide se conecta en serie con un contacto NC del relé en el paso en
que se encuentren.
Para volver a excitar un solenoide se conecta un contacto NA (del relé del paso actual) en
paralelo con el contacto NC que lo desactivo anteriormente.
Este método es mejor que todos los anteriores pues éstos rompen los enclaves para lograr
la acción de desactivar cargas, pero este método se centra en la desactivación de las
electroválvulas que controlan los cilindros.
3.2.1.4.10 Cuestionario.
¿Por qué el último paso no se enclava?
No se realiza el enclave del último paso pues éste paso consiste en que el sistema se
apague, rompiendo todos los enclaves de los relevadores.
¿Por qué en este método se desactivan cargas y no enclaves?
Pues si desactivamos pasos (rompemos enclaves) cada paso anterior desactivará al
siguiente y por consecuencia apagará relevadores que aún tienen órdenes de control que
ejecutar.
104 1Página
3.2.1.5 Laboratorio V.
3.2.1.5.1 Título.
SECUENCIA A+, B+ A-, B-, C+, A+ B+, A-, B-, C- UTILIZANDO EL METODO SECUENCIAL
3.2.1.5.2 Objetivos.
Reconocer y seleccionar los elementos necesarios para realizar la secuencia.
Realizar la secuencia A+, B+ A-, B-, C+, A+ B+, A-, B-, C-, utilizando el método secuencial.
Diseñar los esquemas neumático y eléctrico para realizar la secuencia.
Comprobar el funcionamiento de los esquemas diseñados en el simulador.
3.2.1.5.3 Materiales.
Software Automation Studio
Cilindro de Doble efecto (3)
Alimentación eléctrica 24
Electroválvula biestable 5/2 (3)
Sensor de proximidad (Final de Carrera) (6)
Solenoide (6)
Pulsador NA (1)
Pulsador NC (1)
Relevadores (8)
Válvula reguladora de caudal (6)
Alimentación Neumática
3.2.1.5.4 Procedimiento.
Seleccione los elementos necesarios para la construcción del circuito
electroneumático.
Diseñe el circuito de control en Automation Studio que realice la secuencia deseada.
Diseñar los esquemas de control neumático en Automation Studio.
Ejecutar la simulación y verificar su funcionamiento.
Realizar las conclusiones de la práctica.
3.2.1.5.5 Descripción.
Para el inicio del sistema se necesita de un botón pulsador NA, que es quien energizará el relé K1 y
éste a su vez se enclava y excita la electroválvula en el lado A+ para que pase el primer
movimiento que es la salida del vástago del cilindro A. Para el paso número 2, se debe "preguntar"
por el paso anterior y el sensor que activó este paso según la lógica de programación eléctrica. Se
tendrá que activar un relé K2 para el segundo, conectado en serie con el contacto del paso
anterior y el sensor al. El relé K2 provoca el regreso del cilindro A y la salida de B. Los sensores
que se activan al final del paso 2 son a0 y 131, y son quienes al estar en ese estado activan al relé
105 !Página
K3, y por tanto al tercer paso de la secuencia. El tercer paso se encarga de retraer al cilindro B y
finaliza accionando el sensor b0. El cuarto paso y su relé K4 se activan con el sensor b0 y excitan al
solenoide C+, haciendo que el cilindro C se extienda y active el sensor c1. Los pasos siguientes son
activados por sus respectivos sensores y relevadores como hasta ahora.
La figura 3.2.1.5-1 nos ayuda a entender los movimientos del sistema así como la activación de
solenoides y sensores en cada fase.
FASES O LINDRO A CILINDRO El O INDRO C SENSORES MOVIMIENTO
-1••=•=- C.I
1 ..,••••••••=p*. 1111Eam•nes....
2 bl BOL
4 ti
raraeilr el ,b1 Felie
6 e0 A-
7 .11-....erae arara> BO 6-
elbs•••••,,... 4:0
rCONDICIONES DE CAMBIO
!
Figura 3.2.1.5-1. Condiciones de cambio del sistema.
3.2.1.5.6 Esquema del circuito neumático.
AO Al
BO 61
(-
11 A [B- te+ WIAII AMI
CO C 1
Figura 3.2.1.5-2. Esquema del circuito neumático.
106 'Página
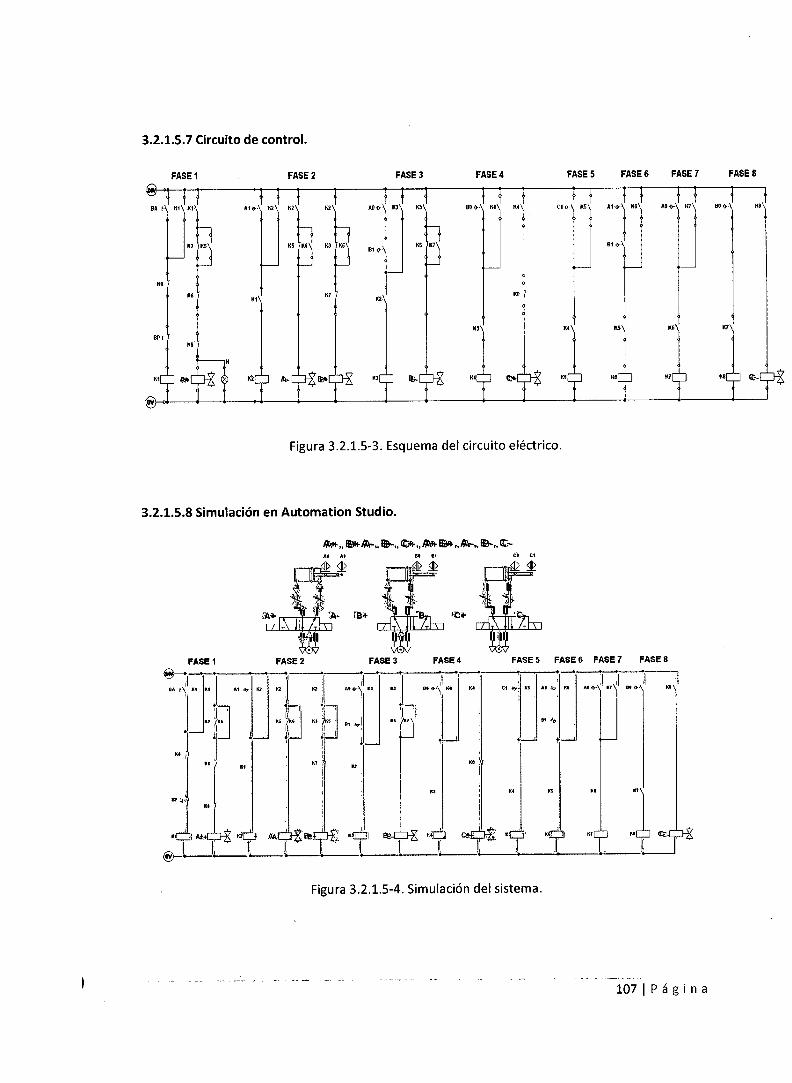
3.2.1.5.7 Circuito de control.
FASE 5 FASE 6 FASE 7 FASE 8
BAO'- \
FASE 1 FASE 2
FASE 3 FASE 4
Ale- K2' 152 \ AO \ K3 K3 \
KS /K6 \ 2), <6. KS ‘K7 \ K3 DI
me r 116
KA
DA E \ K1 \ KI
K2 K5
K1\
o
o o
Kl
mi= IN. K7 o
K2rE j 1-71-* BY*F11 63
o
-* KCEI C14113-1 K5= O
me=
Figura 3.2.1.5-3. Esquema del circuito eléctrico.
3.2.1.5.8 Simulación en Automation Studio.
Al Al BO DI CO C 1
ri3im ke+
FASE 1
FASE 2
FASE 3
FASE 4
FASE 5 FASE 6 FASE 7 FASE 8
(15,-*
DA 1‹,
•
111 ,
131, 4, .
--•-•-•
Ki
—...
el
110
Kg
..—.1
Al Ay
KI
Kt
--.....•---..-•
IQ
'11
ES (KG I
in
e—
L40.
IQ
K77t
_ .--1—..
I
..^
7,3 7KS KG
•
AH
BI tp •
.-1—.
1....._.,
--,7
K1 113
_
ti5711
.-
7 \'
11 BO oA' 191
c",
KA
KB :
I
_
CI II.. Kl Al KA
al 4.
KG
+
Kl AO O-
Kl
....
l 177 1 D14\1l
K7
..... I--
El 114
KI
Figura 3.2.1.5-4. Simulación del sistema.
107 ¡Página

3.2.1.5.9 Conclusiones.
Como las válvulas son biestables, para el retorno de un cilindro se debe desactivar la
bobina del lado que provoca el avance. Entonces para hacer retornar un cilindro
desactivamos la bobina de avance y excitamos el lado opuesto.
Los sensores son usados como las señales que activan cada paso.
En este método cada relevador se encarga de realizar un paso.
3.2.1.5.10 Cuestionario.
¿Cuál es la característica principal del método secuencial?
Este método se caracteriza por el uso de enclaves de relevadores como memorias de los
pasos, por cada fase se tendrá un relevador para el enclave y cada contacto de relevador
realiza el enclave del mismo.
¿Qué función cumplen los sensores en la secuencia electroneumática?
De acuerdo a la lógica, cumplen la función de sincronía del sistema pues nos aseguramos
que siga el orden de los pasos.
¿Cómo se apaga la secuencia para volver a ejecutar los movimientos?
Para apagar el sistema se debe romper todos los enclaves de los relevadores, esto se
consigue conectando un contacto NC en serie al primer relé y ya que cada paso depende
del anterior, al apagar el primer paso apagamos el segundo y así sucesivamente.
1 108 ¡Página

3.2.1.6 Laboratorio VI.
3.2.1.6.1 Título.
SECUENCIA A+, B+, A-, C+, B-, C-, UTILIZANDO LENGUAJE LADDER
3.2.1.6.2 Objetivos.
Ejecutar los movimientos A+, B+, A-, C+, B-, C- de los tres cilindros utilizando el método
secuencial.
Identificar los elementos y herramientas electroneumáticas necesarias para realizar la
secuencia A+, B+, A-, C+, B-, C- con el método secuencial.
Implementar y realizar la simulación del esquema neumático y eléctrico para la secuencia
A+, B+, A-, C+, B-, C- diseñada en un simulador (Automation Studio).
Verificar el buen funcionamiento de la secuencia A+, B+, A-, C+, B-, C-.
3.2.1.6.3 Materiales.
Software Automation Studio
Cilindro de Doble efecto (3)
Alimentación eléctrica 24 y
Electroválvula biestable 5/2 (3)
Sensor de proximidad (Final de Carrera) (6)
Solenoide (6)
Pulsador NA (3)
Válvula reguladora de caudal (6)
Alimentación Neumática
3.2.1.6.4 Procedimiento.
Configurar el circuito de potencia en Automation Studio.
Programar el circuito de control en Automation Estudio.
Ejecutar la simulación y verificar su funcionamiento.
Realizar las conclusiones de la práctica.
3.2.1.6.5 Descripción.
Para controlar los tres cilindros de doble efecto, A, B y C, mediante electroválvulas biestables se
requiere cuatro sensores, denominados esquemáticamente: a0, al, b0, bl, c0 y cl para detectar la
salida y retracción del movimiento de los vástagos y activar las fases de la secuencia requerida. Se
tienen tres pulsadores para dar inicio, detener y reiniciar el sistema. Para el control de las
electroválvulas se excitan solenoides que son las salidas del proceso.
I
1
I _
109 'Página

A continuación se presenta la tabla 3.2.1.6-1 con la relación de entradas y salidas del proceso para
el control mediante PLC.
ENTRADAS SALIDAS
1:0/0 START 0:0/0 A+
1:0/8 STOP 0:0/1 A-
1:0/10 RST 0:0/2 B+
1:0/1 a0 0:0/3 B-
1:0/2 al 0:0/4 C+
1:0/3 b0 0:0/5 C-
1:0/4 bl
1:0/5 c0
1:0/6 cl
Tabla 3.2.1.6-1. Entradas y salidas del proceso.
Desde la pantalla de diseño del simulador pulsar el botón START, que hace al solenoide A+
excitarse, de esta manera se produce la extensión del cilindro A y el accionamiento del sensor de
posición al, el mismo que permite seguir la secuencia y la activación del solenoide B+, y como
resultado el cilindro B se extiende. Cuando el cilindro B alcance su posición de adelanto accionará
el sensor bl, éste guía la activación del solenoide A- y por tanto la retracción del cilindro A. Esta
retracción activa el sensor a0 y excita el solenoide C+ de la electroválvula provocando la extensión
del vástago. Cuando el vástago del cilindro C llegue a su posición final accionará el sensor cl para
que éste a su vez haga retornar al cilindro B. La última acción es la activación del sensor b0 y por
ende el regreso del cilindro C, con esto finaliza la secuencia electroneumática.
3.2.1.6.6 Esquema del circuito neumático.
<0>
Figura 3.2.1.6-1. Circuito neumático de la secuencia.
110 1 Página

IA
'vi
In,
1134
1135
1315
1
ÍA
0:010 C
1:0/4 k ° 3
2 3E 1_ +
3t 3t
k3
PUNG1
1:010 1:011 k3 k7 kl o —jr o 03E o• o I{ 9 4 H'.-
O '2
081.9
031'4
0125
03210
O
0:6:¿ O AB
0119
o 032'1
00111
O 30'1
0:011 0A13
k6 0:15 3E • C
k7
1:018 31 -
1:0110
D
k8 9 3[ 9
KG 1:0/5 9 31 9 9 3
1:0t2 kI 3E—•—•-31
c 9 0A14
t'89 1:011 3E 3
0:04
3
k5 1°
k8
0:013 c
3.2.1.6.7 Diagrama de control.
Se presenta la solución propuesta para el control de la secuencia utilizando el lenguaje de
programación ladder.
Figura 3.2.1.6-2. Diagrama ladder de la secuencia.
111 1Página
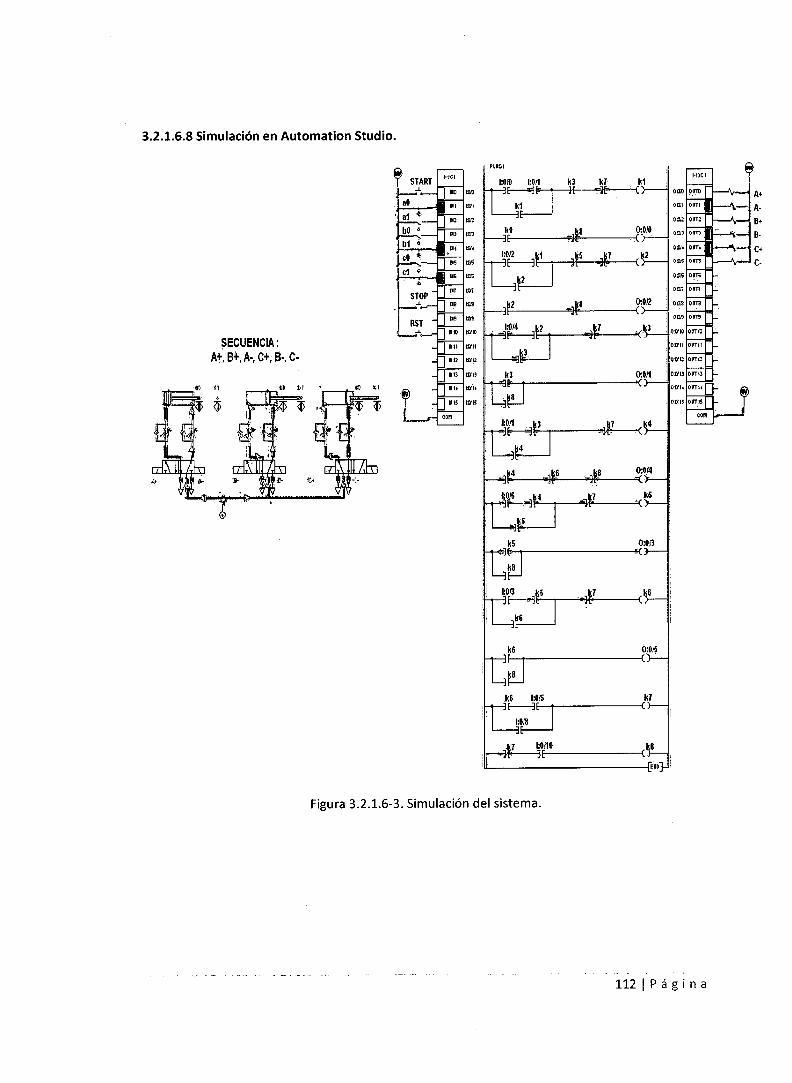
2
1014 fg-•-1
SECUENCIA: A+, B+, A-. C+.5-. C- n12
ni
Wel
0011 113 r]
PUIG'
k3 07 01
01 JiO 0:010 ]
1:012 5 k7
2
010
lA
011
121
AS
8010 1:0/1 3 E--- [S-
ki
I E
no
015I
DA,
0A
Of1
015
ItA3 0:012 01115
4 k5
11(
08 E-
1:0/3 05 F----
)16
06 1:0/5
1:018 3E
. y 1010 3
0:01
0:015
Ck7
110
3.2.1.6.8 Simulación en Automation Studio.
Figura 3.2.1.6-3. Simulación del sistema.
112 1Página
3.2.1.6.9 Conclusiones.
Es importante ubicar en el lugar correcto los sensores para que el movimiento del vástago
los pueda activar y obtener la secuencia deseada.
Se comprobó el buen funcionamiento de la simulación estableciendo las conexiones
necesarias para los movimientos de la secuencia usando el lenguaje de programación
ladder.
Se debe romper los enclaves de cada paso para que la secuencia pueda iniciar
nuevamente.
Para observar mejor cada paso debemos usar reguladores de caudal en el circuito
neumático.
La simplicidad del método de programación en lenguaje de escalera representa una
ventaja sobre los demás métodos que tienen falencias en el control doble.
3.2.1.6.10 Cuestionario.
¿Qué función cumplen los sensores en la secuencia electroneumática?
Los sensores son los componentes del circuito encargados de enviar la señal eléctrica para
continuar con la siguiente parte de la secuencia.
¿La secuencia presentada es cíclica en esta práctica?
No, la secuencia de tres cilindros no es cíclica, para repetir los movimientos se debe
presionar el botón START.
¿Qué diferencia al método de programación en lenguaje ladder de los métodos
anteriores?
Se diferencia en que al igual que el método secuencial desactiva cargas y no pasos, es
decir no rompe enclaves.
113 ¡Página

3.2.1.7 Laboratorio VII.
3.2.1.7.1 Título.
SECUENCIA CICLICA A+, TMP1, B+, B- MOTOR, CNT, A-, TMP2, MOTOR, TMP3 UTILIZANDO
LENGUAJE LADDER
3.2.1.7.2 Objetivos.
Seleccione los elementos necesarios para la construcción del circuito neumático y la
correcta conexión al PLC de entradas y salidas.
Ejecutar las acciones A+, TMP1, B+, B- MOTOR, CNT, A-, TMP2, MOTOR, TMP3 de los
cilindros y motor utilizando el método de programación ladder.
Hacer uso de contadores y temporizadores en el control de la secuencia.
Comprobar y realizar la simulación de la secuencia deseada.
Desarrollar la capacidad de operar y resolver una secuencia electroneumática con el
lenguaje de programación ladder.
3.2.1.7.3 Materiales.
Software Automation Studio
Cilindro de Doble efecto (1)
Cilindro de simple efecto (1)
Alimentación eléctrica 24
Electroválvula biestable 5/2 (1)
Electroválvula de 5/2, retorno por resorte (1)
Sensor de proximidad (Final de Carrera) (1)
Solenoide (3)
Pulsador NA (3)
Válvula reguladora de caudal (4)
Alimentación Neumática
3.2.1.7.4 Procedimiento.
Seleccione los elementos necesarios para la construcción del circuito neumático de la
secuencia.
Diseñe el diagrama de control que realice la secuencia deseada.
Simule la secuencia, observe el comportamiento del sistema y evalúe posibles errores
en la programación.
Realizar las conclusiones de la práctica.
114 1Página

3.2.1.7.5 Descripción.
Operar el circuito (pulse el botón de arranque BA del sistema), éste pulsador activa al
RELE1 y seguidamente se activa el solenoide A+, la maniobra anterior va a hacer que el
cilindro A se extienda y al llegar a su posición final active al temporizador 1 (TONI), quien
tiene un PRESET de 5 y un tiempo base de 1 segundo, es decir luego de activarse TONI el
tiempo meta a alcanzar es 5 segundos. Esto significa esperaremos 5 segundos para
ejecutar el siguiente paso. Después de este tiempo, un contacto de TONI activa el
solenoide B+ extendiéndose el cilindro B y accionando al sensor b1, el cual excita la bobina
B- y el cilindro B se contrae pero a la vez el sensor activa el encendido del MOTOR. Para
que el siguiente paso ocurra se debe esperar que el contador (CTU) reciba la cuenta de
tres pulsos provenientes de un pulsador (que representa el conteo de piezas de un sensor
por ejemplo). Luego de contabilizar los pulsos un contacto de CTU activa el solenoide A-
ocasionando que el cilindro A se contraiga. Luego se esperará 10 segundos de un
temporizador 2 (TON2) para después detener el MOTOR. El sistema finaliza con la
activación de un último temporizador (TON3) y la espera de 5 segundos para reiniciar la
secuencia sin necesidad de presionar nuevamente el BA, ya que es un sistema cíclico.
A continuación se presenta la tabla 3.2.1.7-1 con la relación de entradas y salidas del
proceso para el control mediante PLC.
ENTRADAS ,SALIDAS
1:0/0 BA 0:0/0J A+
1:0/2 BP 0:0/2 B+
1:0/4 PULSOS 0:0/4 B-
1:0/6 bl 0:0/6 MOTOR
Tabla 3.2.1.7-1. Entradas y salidas del proceso.
La siguiente tabla ayuda al diseño y comprensión de la secuencia.
MOTOR SENSOR MOVIMIENTO
40. b0 C.
eir—^ el A+
S seg.
J B+
3 s\ ENCENDIDO b0 8-
y guisos
4 so A- 1.
10 seg
5 er----- 11111—.1."-1— ,o' APAGADO 40 . b0 C.I
) S seg.
6 CICLICO ../ .0,60 C.1
Tabla 3.2.1.7-2. Condiciones de cambio y movimientos del sistema.
FASES CILINDRO A CILINDRO 13
o
115 1 Página
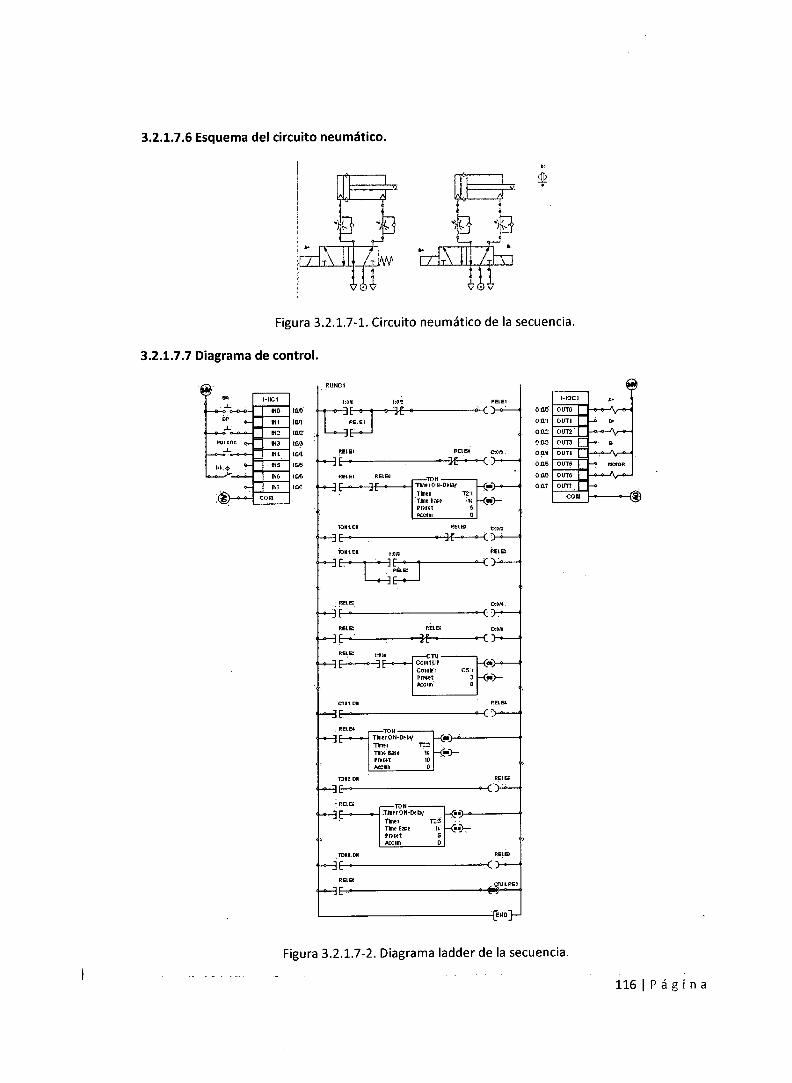
P.LING1
I:000
NEL El PELEE
L E NEM NE11%
3-E •
1:072
P.EL El
n. The I' O el-Cre bp [—TON
ITO 1 OXO
T
Ñ:(4111 P reiet
T1 2:
5 o
000
001
0'1,2
errter
OSO
000
O ir
T0111.011 NE1.0
REL EE
TU COIItIJP Ccorat r Preeet
1,DN TIflItON-0PEI Tener T22 TELE tuse .1$ P IVO t 10 ACOIM o
The 1 0 N-De bt Tener TIRE ehe PU
15 M
Pucun
L E
iDN1..011
RELEE.
E° PELEE
PELE
[ o
CTI31. OH
E . RELEE
TO112. EN
E . - RELEE
T0111.011
E. RELEE
000
0:018
PELEE
115
3.2.1.7.6 Esquema del circuito neumático.
Figura 3.2.1.7-1. Circuito neumático de la secuencia.
3.2.1.7.7 Diagrama de control.
Figura 3.2.1.7-2. Diagrama ladder de la secuencia.
116 1Página
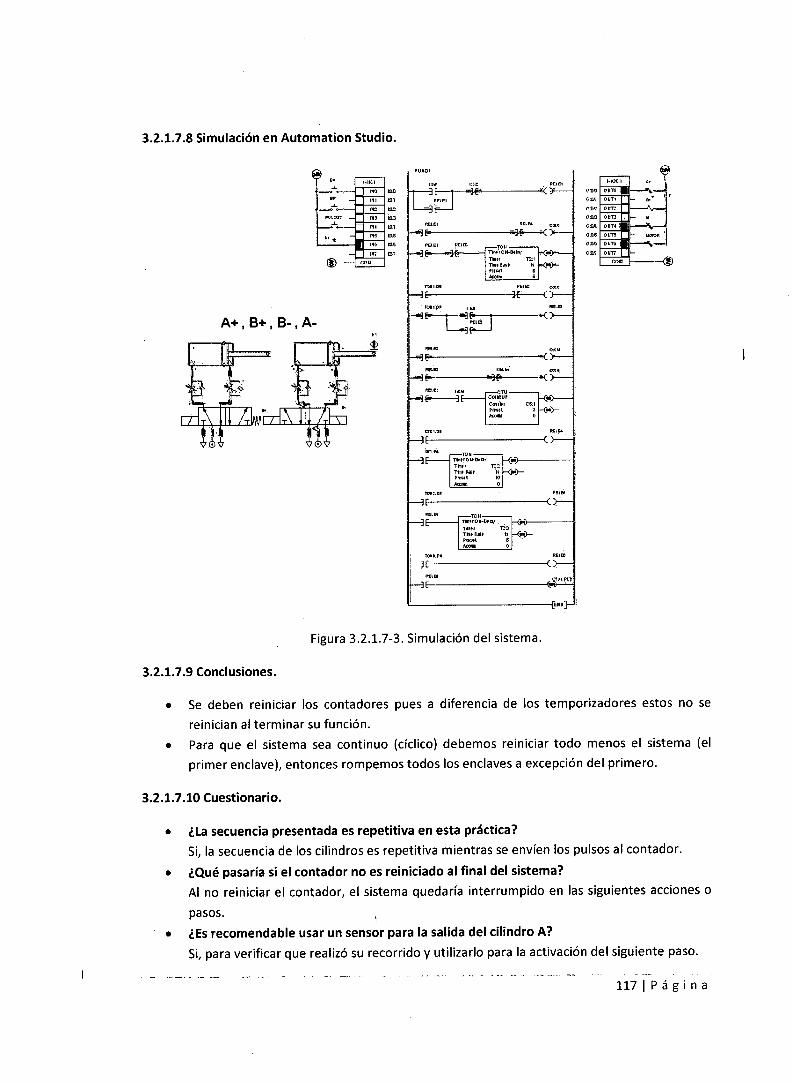
MEIN
MEM EU= EME MEM MEC
JEME ME2111 El=
boa
elt
•
0:014
9,1)
COMUP
Col it I tiesto tiettn
REIM
rete:
E
TON
Ttrne
r 04-0elai TI»I nt
The lie It
etet 10 A011e
0
TO Off !Iciee
0:e4
A+, B+, B-, A-
11»
rThline, 011-De bi ,
Thel TE.3 Tito Balé II
Ptetet 5 P.. O
u
ID
3.2.1.7.8 Simulación en Automation Studio.
CE11111 CERA LEER EEZEI Eras
REZO
Figura 3.2.1.7-3. Simulación del sistema.
3.2.1.7.9 Conclusiones.
Se deben reiniciar los contadores pues a diferencia de los temporizadores estos no se
reinician al terminar su función.
Para que el sistema sea continuo (cíclico) debemos reiniciar todo menos el sistema (el
primer enclave), entonces rompemos todos los enclaves a excepción del primero.
3.2.1.7.10 Cuestionario.
¿La secuencia presentada es repetitiva en esta práctica?
Si, la secuencia de los cilindros es repetitiva mientras se envíen los pulsos al contador.
¿Qué pasaría si el contador no es reiniciado al final del sistema?
Al no reiniciar el contador, el sistema quedaría interrumpido en las siguientes acciones o
pasos.
¿Es recomendable usar un sensor para la salida del cilindro A?
Si, para verificar que realizó su recorrido y utilizarlo para la activación del siguiente paso.
117 ¡Página

3.2.1.8 Laboratorio VIII.
3.2.1.8.1 Título.
SECUENCIA A+, B+, A-, B-, A+B+, A-B- UTILIZANDO LENGUAJE LADDER
3.2.1.8.2 Objetivos.
Seleccione los elementos necesarios para la construcción del circuito neumático y la
correcta conexión al PLC de entradas y salidas.
Resolver la secuencia electroneumática con el lenguaje de programación ladder haciendo
uso de software.
Comprobar y realizar la simulación de la secuencia deseada.
3.2.1.8.3 Materiales.
Software FluidSIM Neumática
Software CODESYS
Cilindro de Doble efecto (2)
Alimentación eléctrica 24 y
Electroválvula biestable 5/2 (2)
Final de Carrera (4)
Solenoide (4)
Pulsador NA (2)
Contactos (para finales de carrera) (4)
Válvula reguladora de caudal (4)
Alimentación Neumática
Módulo de entradas (1)
Módulo de salidas (1)
3.2.1.8.4 Procedimiento.
Crear el proyecto de lenguaje ladder en CODESYS.
Crear las variables de entradas y salidas, y sus respectivos módulos en el proyecto.
Desarrollar la solución de la secuencia en lenguaje ladder del proyecto.
Crear los parámetros de comunicación en CODESYS.
Configurar el circuito de potencia y las conexiones de los módulos de entradas y salidas en
FluidSIM.
Abrir el configurador de comunicación OPC de CODESYS.
Configurar los módulos de entradas y salidas en FluidSIM y relacionarlos con los de
CODESYS
Abrir el PLC virtual de CODESYS y cargar el proyecto
Ejecutar la simulación y verificar su funcionamiento.
Realizar las conclusiones de la práctica.
I 118 !Página

[ State
IRUNNING
[Program Loaded
essages
Prolect Info — Program Neme ..t.A89.pro Date = 21.7.1510:29:41 Version = Author =
TCPIP•Set8Pgs I IP-Addiess 192.168.1.41, Pon 12130
RS232-Settings 115200 8d,1 .Syopeit, NO Park
Stop Reset Tasks5., I 10-List.., I Shutdown I
PIDIVinNis V2A.7.47 Burld:Slár 19 2019 PEM0241,..2111
Ir C,ornrnunketkm Perarneten a.,._ —.......
Chame!: 9- Local II (Level 2 Route) 11.A00.0m
OK cOlp
I 1
LIZEZI Name I Velm 1 Co 1
Cermet
ss Addre hx.ehcct IP ecklieu a hosemme Pod 1200 Tm g2ild O Mcimok bYtm.d , blo Fiemove i
G átewey ...
U—
itiiii~~~~
Figura 3.2.1.8-1. Selección de canal de comunicación.
Figura 3.2.1.8-2. Cargar el programa en el PLC virtual.
3.2.1.8.5 Descripción.
Pulsando el botón de arranque BA se activa relé interno o marca R1 y se enclava así el primer
paso. R1 debe activar a la carga Y1 (OUT.0) que en nuestra conexión de FluidSIM es el solenoide
A+, provocando la salida del cilindro A. La activación anterior activa el sensor Al (IN.3) y dispara el
segundo paso activando R2 y enclavándolo. R2 activa a Y3 (OUT.2) que es B+ en FluidSIM, con esto
el cilindro B se extiende y acciona a Bl. El tercer paso es la activación y enclavamiento de R3
accionado por Bl. R3 activa a Y2 (OUT.1) que es A- en FluidSIM logrando que el vástago de A
regrese a su posición inicial y accionando a AO. R4 es activado y enclavado por medio de AO, y es el
relevador que energiza a Y4 (OUT.3) que es B- en FluidSIM, así el cilindro B se contrae activando a
BO. El relevador R5 es activado y enclavado por el sensor anterior y es quien devuelve la energía a
los solenoides A+ y B+, rompiendo simultáneamente la energía de las cargas A- y B-. El paso
siguiente es el retorno de los cilindros y lo realiza el relé R6 de forma inversa a como lo hizo el relé
RS. El último paso se activa con el retorno de los cilindros mediante el paso anterior, y este paso es
quien debe romper todos los enclaves y devolver al sistema a condiciones iniciales.
119 1Página

La figura 3.2.1.8-3 representa la distribución de las entradas y salidas que nos ayuda a entender la
descripción de funcionamiento.
1 • .. u. 9.:0 .... fr. 0 W. .11,1t.
_______ 1149119d »1-17-3 Flill.-71,1 SUI.'.1 1161.1a1/01 Mi
NO DA FU. r
.11 IP
—I )-
00161J
1 *U 4
.11.
1.13 al
011 ,0S >-.--
I. DO
—I 1 >—
En PI
OOP
Olfr.0
—I I 1 ›.-*
l ,
DM
T2 011t.1
--4 /— nre
Te OVT2
—I I 0-
re 007.1
'11
—I f U L,
men-,msoze pu....r wipz.
Figura 3.2.1.8-3. Entradas y salidas del sistema.
115) CoDeSys - LABORATORIO10.pro• - 1Giobal_Vanables]
File Edit Projfct Insert Extras Online :Wondow_ Help
Rfighns"IWIR1 Resources
a•Glabal Variables
--friVariabfe_Configuration (VAR_
J %rey lecSfc.fib 2.6.14 10:37:46: glo
Aterre configuration
Lilxary Manager
1:13 Log
PLC - Browser
ID PLC Configuration
Sarryrfing Trace
Target Settens
Task configuration
Watch- and Recree Manager
Workspace
7/41_011DEBVIL INEWM. 013313771E£
Bk13=01; BP:I3=11:
al:111733W 00: Eflta;
Ef3/333.1; nema:
EMP74; E11/921; EEITOUt;
latL500.?,
002
Figura 3.2.1.8-4. Declaración de módulos para comunicación con FluidSIM.
120 ¡Página

11111'1111mq
AO Al BO B1
4
3.2.1.8.6 Esquema del circuito neumático.
Figura 3.2.1.8-5. Circuito de potencia de la secuencia.
3.2.1.8.7 Diagrama y programación de control.
AO
+24V 1 2 00
3 3
BA BP [-\
4
3 4 5 6
Al (:)--\ BO
o DV 0-0-
T T o 2 3 4 6 7
CoDeSys.OPC.02
FluidSIM Out IN
CoDeSys.OPC.02
FluidSIM In .OUT
o 2 3 4 5 6 7
I 1 1 1-0
A+ / A- 1 / 1-1 B+ I / 1-4 B- I / I--
ov
Figura 3.2.1.8-6. Conexión de entradas y salidas del PLC.
Y-
121 'Página

CoOrSys • LAEORAT041010.Ere _ __V... ''''. — ÓI I sert Evsms On'ine VOmtraw 14
n1(701511M9~21 algiltal1141 e'r, indl Mv017191 FM7.1 elcillirilel 171
L
8 E1115.11. (0RG) -H PIZ_PRE (MEI
,wsiatmc»TRG..) , , - -,t,',---,- -,-- - . 2=1.5•41r1 .0001 :1311~SEC0JE003IA 000 K1X
R21051Cil: R3:60=4;
003 R4 0M130.: 115,10=4:
rOrni R7.10=4: 1:5:perly551
0001
84. EP R7 R1 4 —I [ I/I-1/I ( )--
R11_ j
—I N«
R1 RO R6 31
LIRSI j
0003
R1 01 ft?
R7
00 R4 RO Y3
4 )- 1/1 -I f LII/Iii
Figura 3.2.1.8-7a. Programación en CODESYS.
.1n tfit PeoJectSIM tIno 0r0 Mfinelow Req.
11'41E11 tti1~11-151441
11t15951 "1—‹ rirl FIV.541113-1.W11151.1WW1 PIM tj, ny, .1 011544-111
0000
i 4, 0UVIRCIA 0,116.1.12, ›.' (9- ; 441.170.2301~CUENCLA .'
3300217:11
R2 DI R2
HER3
R3 R5
/ 5.2
FtR6
000
Ra O Ra
FER4
R4 -R5 I
R4 1:42 R5 1
RS f
Figura 3.2.1.8-7b. Programación en CODESYS.
122 !Página

W1,0 -t r-
• e•Sli Mis de diiik4stencridn' )
Upc!” km, ISICIMGA
pie Sroar
Pli" ~MOR t1M1119 W-3 174471,-/1H1•1*-11.161.1.1.111151
1-9MWOM
PAC.
(10.0i «Mien htvilf Wide. 'Cocino 0,00 0
oc,alclej->rheMLgái=K.1-;.s1510411411(1441111••01,«»•4
00 ME E AA 0-,A1
CA EP Ri R1
R3
1/1 FkildSly Out
51
R2
Rl
Rk ti Project Inlest
1511/10 411411111151bn 11.115511 slIM 9.0.H 1lI 11•1111011•1 rírvi -41-xweir1W— 0" SRl
, "Mill"""r=r141 mot»IrAsaasEcuEnak
mlsow Fe" umpw mi" mina, amw.
"2.1u
0011
Figura 3.2.1.8-7c. Programación en CODESYS.
3.2.1.8.8 Simulación en FluidSIM y CODESYS.
Figura 3.2.1.8-8. Simulación de la secuencia planteada.
1231Página

PluiePINI-P (GNU \ SAIDA . 11170,T ¡Me 71-ie • q
••Archloo Ediffin gecutew Bar lioteca Insertar •DiOictice Proyecto
I Drál2hgel ., Y, (I. el g ArParpordii-lain gil€2 -€10zkekcIcIl 01 • >E3hmi>>1M1 Ver -o— Yemen.
reaDelp - 1.1200.1TOCJOIO te , 117CUENCIA 777.GaDa - -- ..- -----, -- .... a ---
q11 64a Ima fe wa eN Mil e
Ing£11 1101)1~1L1519;) fL1~] n1" . -3 El 171.7>1911 nwizi hilialsIolosh rivl .0 R1
R2 02 1r,
70
-lati MISAL PRRI
1 PLCJI1G 0001 CEI
.,...a
.T.
Ra 97, R7 al g
R111-91.---411
Ft 4 03 Re 01
—CP—
RI al 02
Rl
RO VS
—f11-
02 el
Rl
--121—
. a 0:1210ZEI nen 01111202 0W0fl202 kw 1222,,
Figura 3.2.1.8-9. Simulación en CODESYS.
Figura 3.2.1.8-10. Simulación en FluidSIM.
124 ¡Página

3.2.1.8.9 Conclusiones.
Las cargas se deben activar con relevadores internos, no con condiciones de cambio como
lo son los botones pulsadores y los sensores.
La integración de los software CODESYS y FluidSIM se ejecutó satisfactoriamente.
Se comprobó el buen funcionamiento de la simulación estableciendo las conexiones
necesarias para los movimientos de la secuencia usando el lenguaje de programación
ladder.
3.2.1.8.10 Cuestionario.
¿Por qué no se produce conflicto de señales en las válvulas?
Para que suceda esto, cuando activamos un solenoide con un contacto de un relé interno,
con otro contacto NC de mismo relé desactivamos la carga (solenoide del otro lado de la
electroválvula) anteriormente activada.
¿Qué diferencia al método de programación en lenguaje ladder de los métodos
anteriores?
Se diferencia en que al igual que el método secuencial desactiva cargas y no pasos, es
decir no rompe enclaves.
1 125 1Página
3.2.1.9 Laboratorio IX.
3.2.1.9.1 Título.
SECUENCIA A+, B+, B-, TMP1, C+, D+, D-, TMP2, C-, A- UTILIZANDO LENGUAJE LADDER
3.2.1.9.2 Objetivos.
Seleccione los elementos necesarios para la construcción del circuito neumático y la
correcta conexión al PLC de entradas y salidas.
Resolver la secuencia electroneumática con el lenguaje de programación ladder haciendo
uso de software.
Programar temporizadores en el control de la secuencia según la pausa de tiempo que
se desee.
Verificar la solución de la secuencia en los simuladores.
3.2.1.9.3 Materiales.
Software FluidSIM Neumática
Software CODESYS
Cilindro de Doble efecto (4)
Alimentación eléctrica 24 y
Electroválvula biestable 5/2 (4)
Final de Carrera (8)
Solenoide (8)
Pulsador NA (2)
Contactos (para finales de carrera) (8)
Válvula reguladora de caudal (8)
Alimentación Neumática
Módulo de entradas (2)
Módulo de salidas (1)
3.2.1.9.4 Procedimiento.
Crear el proyecto de lenguaje ladder en CODESYS.
Crear las variables de entradas y salidas, y sus respectivos módulos en el proyecto.
Desarrollar la solución de la secuencia en lenguaje ladder del proyecto.
Crear los parámetros de comunicación en CODESYS.
Configurar el circuito de potencia y las conexiones de los módulos de entradas y salidas en
FluidSIM.
Abrir el configurador de comunicación OPC de CODESYS.
Configurar los módulos de entradas y salidas en FluidSIM y relacionarlos con los de
CODESYS
Abrir el PLC virtual de CODESYS y cargar el proyecto.
126 'Página
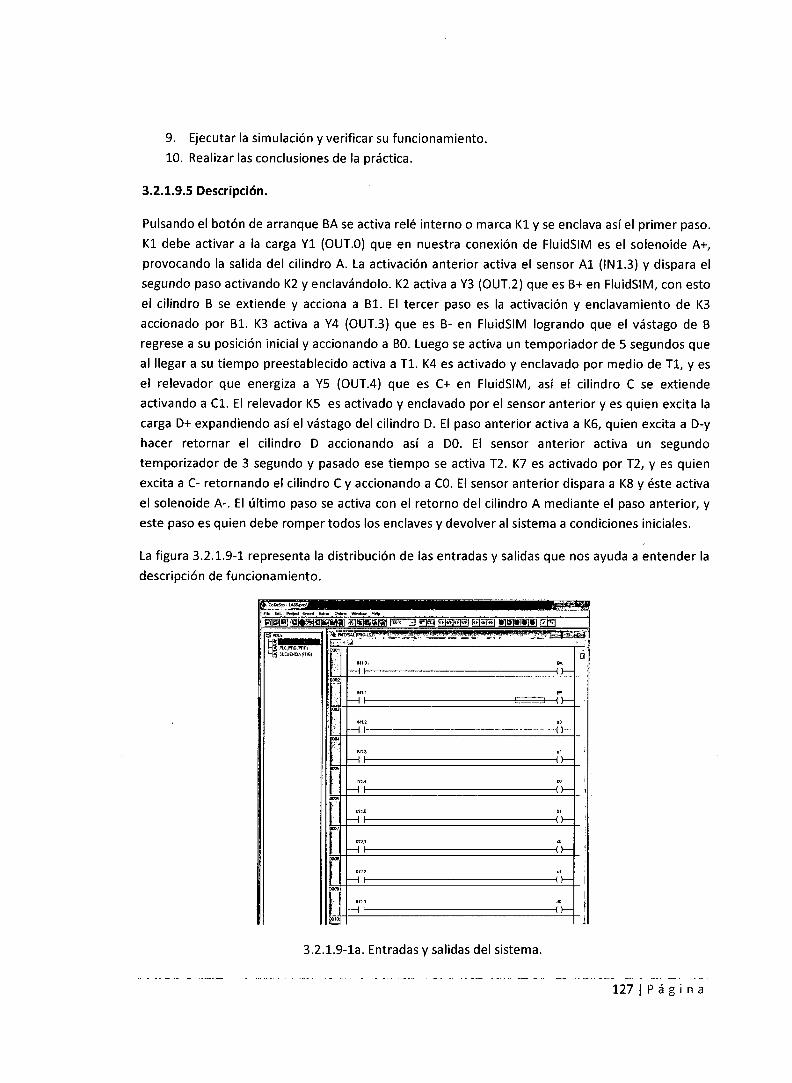
Ejecutar la simulación y verificar su funcionamiento.
Realizar las conclusiones de la práctica.
3.2.1.9.5 Descripción.
Pulsando el botón de arranque BA se activa relé interno o marca K1 y se enclava así el primer paso.
K1 debe activar a la carga Y1 (OUT.0) que en nuestra conexión de FluidSIM es el solenoide A+,
provocando la salida del cilindro A. La activación anterior activa el sensor Al (IN1.3) y dispara el
segundo paso activando K2 y enclavándolo. K2 activa a Y3 (OUT.2) que es B+ en FluidSIM, con esto
el cilindro B se extiende y acciona a Bl. El tercer paso es la activación y enclavamiento de K3
accionado por Bl. K3 activa a Y4 (OUT.3) que es B- en FluidSIM logrando que el vástago de B
regrese a su posición inicial y accionando a BO. Luego se activa un temporiador de 5 segundos que
al llegar a su tiempo preestablecido activa a Ti. K4 es activado y enclavado por medio de T1, y es
el relevador que energiza a Y5 (OUT.4) que es C+ en FluidSIM, así el cilindro C se extiende
activando a C1. El relevador K5 es activado y enclavado por el sensor anterior y es quien excita la
carga D+ expandiendo así el vástago del cilindro D. El paso anterior activa a K6, quien excita a D-y
hacer retornar el cilindro D accionando así a DO. El sensor anterior activa un segundo
temporizador de 3 segundo y pasado ese tiempo se activa T2. K7 es activado por T2, y es quien
excita a C- retornando el cilindro C y accionando a CO. El sensor anterior dispara a K8 y éste activa
el solenoide A-. El último paso se activa con el retorno del cilindro A mediante el paso anterior, y
este paso es quien debe romper todos los enclaves y devolver al sistema a condiciones iniciales.
La figura 3.2.1.9-1 representa la distribución de las entradas y salidas que nos ayuda a entender la
descripción de funcionamiento.
tlit Prged linsed btru Onhno Veme Hp
W.•,,W,-• 1 .11 nli1mff11112111 Ittltlislg P., zl tg fq414914ffil F;1<wli>1 11tw1e1a1lí1 r*I
POU
Eg FiC_PPG Irn 01 1 sccuerme r..)
. ,__:•.._ tbEig,' 1.77'' < 1:1 —
INI.Or BA
)—
INI:1 PA
—I l — 1—
thil:2 30
—I I )---
1/11.3 81
—1 I )----- ....
i
INI.4 PD
—I
l )--
MI 8 hl
1112.1 CO
Bi2 2 ct
IN2.3 . I
—I I )---
3.2.1.9-la. Entradas y salidas del sistema.
127 Página

ra. 1.10 On:jed b,,17i 1e777 ae•
11211§11 151•11141151,1411 IlUtol119/1
Emewee0017 -íj,4Z
170100000
.1E1) .1.9"
0~. ; catrín
enhkewk. fteeylec5.1.611
Laitarnearan. ttnry~
1131.~ -fd Caepa ilaSserb, luce
id TM 07.7.ern 1-41,Wee. ertlflecke .-9,70727•0•
Elot~ 0001 BP4.
IIVITS rInUt
n ea Mac ollenes corrm c‘,190Crts 0~4 mfei/22.
PPR. 0l01l1llI F99.7 SO Al BO IBI an DI DO DI
001
ISM e
—I I ) 1
rl 0.1T II
/- 9/11
n 15J} I
—11 )--- 17.3
Y1 aun,
—1 0--
I —I"I
OUT..1 i 1
-1 *),
i . 0171‘
11
a---
TO 003
—H /— 1 I
VI OUT Il
—I I 0013
va &II 7
_II
3.2.1.9-lb. Entradas y salidas del sistema.
3.2.1.9-2. Declaración de módulos para comunicación con FluidSIM.
3.2.1.9.6 Esquema del circuito neumático.
3.2.1.9-3. Circuito de potencia de la secuencia.
128 !Página
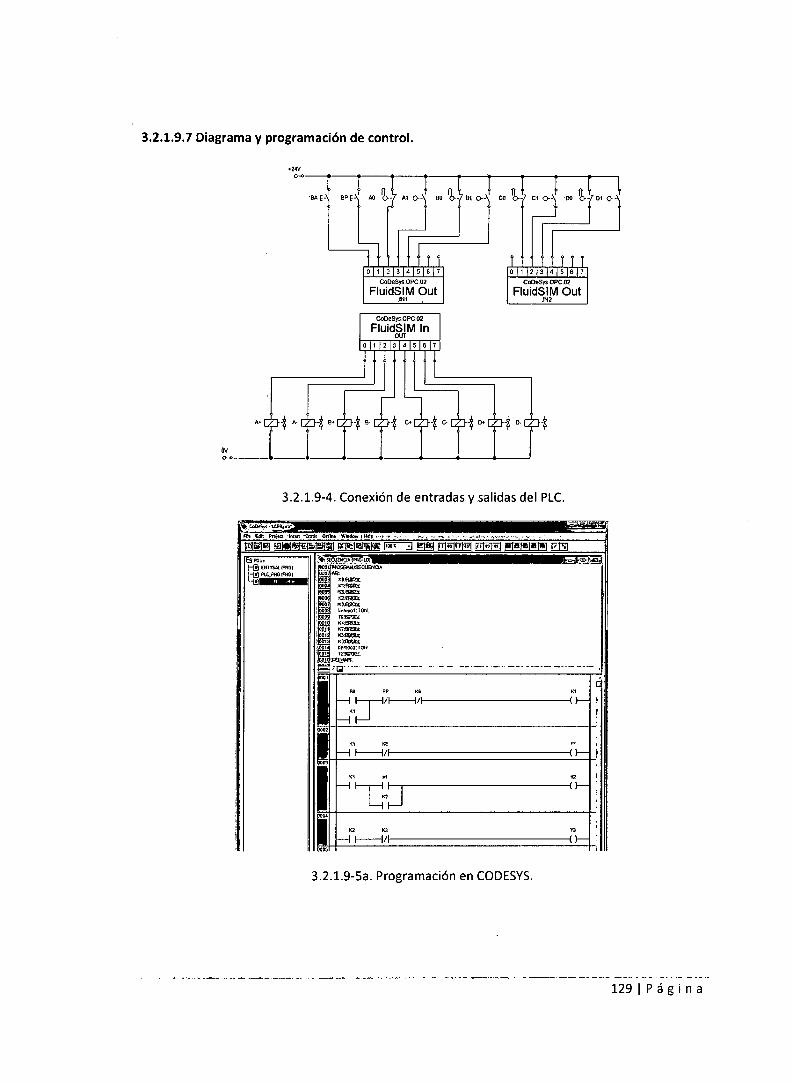
I I 0 11 12 13 14 15 16 17
CONESyS.OPC 02
FluidSIM Out .INI
C00eS00.0PC.02
F uidSIM Out 012
DINBEICIEILIEI
T I 51617
3.2.1.9.7 Diagrama y programación de control.
0210 0-4
8A EA BP É -\ Al C1- o--\ ce
ev
CdDeSys.OPC.02
FluidSIM In .out
3.2.1.9-4. Conexión de entradas y salidas del PLC.
CoDeSys -1.3.439011 1 e1404 AA. -UVA OIl 8 é .
Ig13g1531 Mill"VISlani rrie5511111 I0-3 ".11-41 MSTI"Iffl F1;;;F>1 Mai alrnin MI
U Illu, ft van& (05G)
PLC_INI0 CNN) _
-91,
0
•
' 00
O 001
as ,
UtrtgA ( O ..= . 1.110-5P3.0EGÜENnh ArE
3:EMMY .01530132 11.8.0903C K21319:i 30.13392, Eter. 1: TON. T0E3M K01I51A K7:01111133 /3:072% KB:~ eee.eree«, TZAAM.
OZ.Na.
0000
EU EP KE hl r
111 /1-1/
• KI KE TI
111 31 I
10
K2 K3 Y3
.05
3.2.1.9-5a. Programación en CODESYS.
- • _
129 1ágina

0005
I
02
—1 1 1
61
1
K3)—
le
1
1
0105 _1.
54
)--
,007
tier Ti
npo1
1 }-
K3 130 TON
—1 1---1 1 1N t'A O 15856-717 3.ej El
0008
1
Ti K9 04
)— —1 1 I 1/1
04
—1 1 I
0000
II
114 1E7 Y5
)— —1 1-1/1
D010
161 ol 1:5
)- -Hl 1 1
115
1 1
0011
I
05 KB 57
)---- —1 1-1/1
0017
1-11 Pa P115 (F1161
CoDe5 tA130
3.2.1.9-5b. Programación en CODESYS.
_ _ •-•-.... '4s Odie. 1/15.1. II 14e/p inle .1E0 e Orejee 81 559
1911a1511 M10111131515.1911 .1X1U111111 P-657-3 Flq 17147,1ffirwl F11711->1 lavIellslair11 PIM
o• POU.
r ENTY5.1.15101 a) PIC_PRG ns) 9..1
1316 ,5ECRJENC56 016 1 11.651 " '111:
:.ti . - .
›,,,
d1 193
( )— --1051
L
I I I
K6
I I
0013
KB YO
(1-- II 001.
tema T2 KB 90 TON ( ) II II- .,.,,,,:,,," @.° _ .
ii
12 09 1E7
1 1/1 I I ( )
I
07
-H l
0016
K7 Y13
)-
0017
07 90 KO
}
1
I I I
K13
1
/
I i
3.2.1.9-5c. Programación en CODESYS.
130IPágina
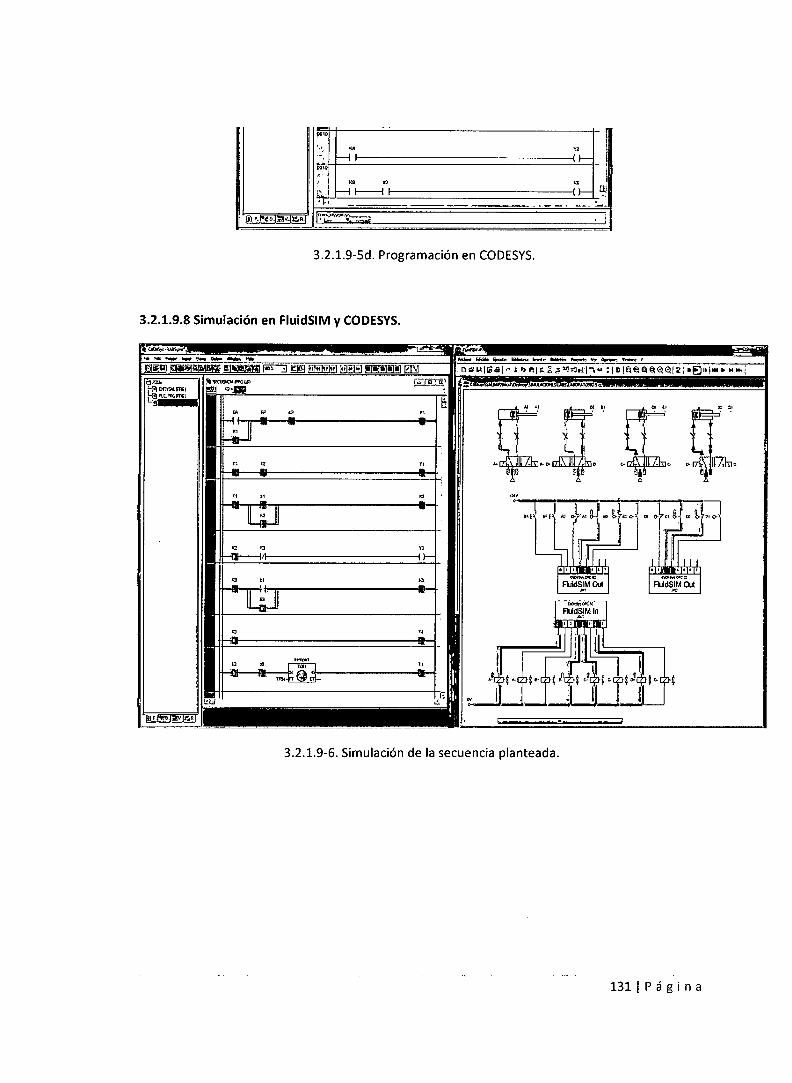
oialeal• Ittieufa,t5werininw :lopeectetcv:112iii0BIBNF> gg
EA 19 C KI
K1
•
.-1
Ki rz Al
1C
l III
EA Al
/
Al
C1
:11 err.el TI
.
Ir«. 1X118
KB Y2
PM
102 a1:1 Ku
' 1 ,
P nD.tz,
3.2.1.9-5d. Programación en CODESYS.
3.2.1.9.8 Simulación en FluidSIM y CODESYS.
3.2.1.9-6. Simulación de la secuencia planteada.
131 'Página
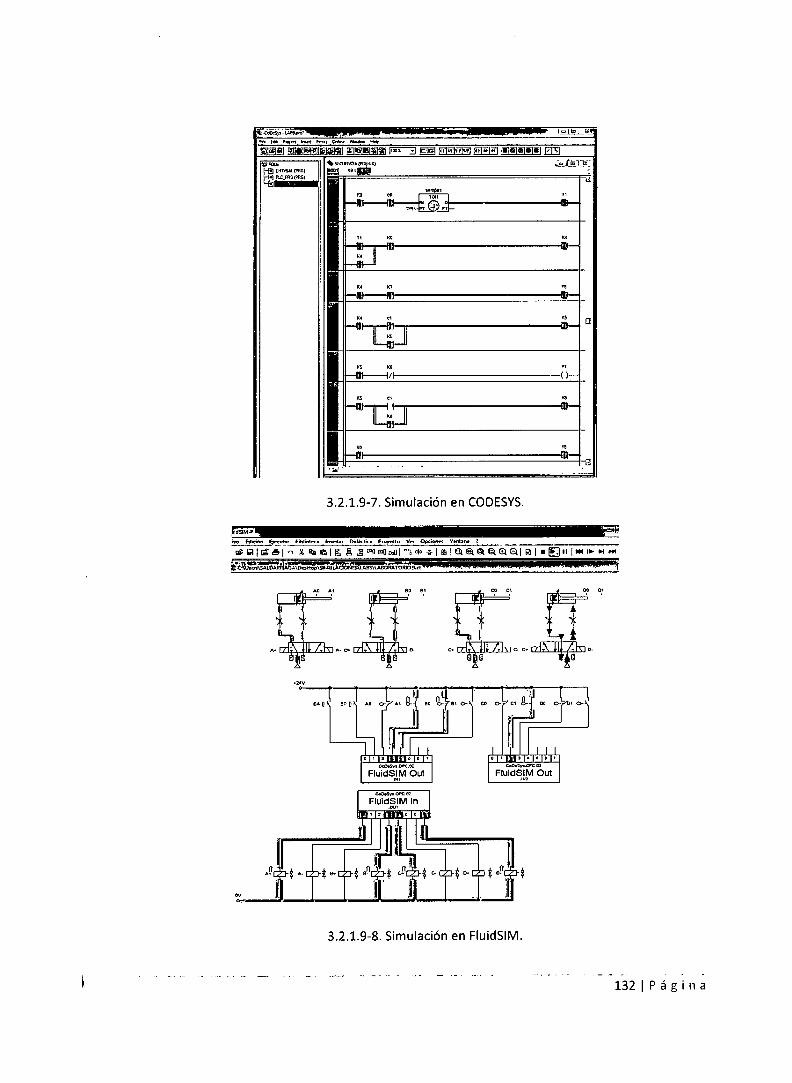
112EIENIt riu 0. 0075. R/PC 02
F uidSIM Out
040.9r4C.0O2
FluldSIM In
c.
uI 1211111112511
FluidSIM Out
Co0c5y4 1.116fon, l_9_111_, _44
444 CdC CCCt In. ...44 0..
9.1-1g~11~ ~12 MU-7-3r'S r."MiMW1 M.H1.1%-llblalal Vini
el POI. E havs.a. Ro; PII.,116(PRGI
%541201.C14~..) rj 1100W
,:e jiirsi'
ter,IM TI
4 -111.111~
12 30 1011
' l4l...411 5º-ºT C3
TI Kg 11.1
..1K141Till
nn
K4 07 70
K4 41 145
/U
05
1/1fl Y/
6
Vi
:
3.2.1.9-7. Simulación en CODESYS.
gro Edtván lecutar 41:1411atere Imantar Chtláctrce froyetto V, (»dones Ventana
ci cl I ech ealLA Acr,fimuoui -101.-IIIIIstetcaQQQ101•EnImm
,......Cro~itill~1~1~1011~~131
3.2.1.9-8. Simulación en FluidSIM.
132 1ágina
3.2.1.9.9 Conclusiones.
La integración de los software CODESYS y FluidSIM se ejecutó satisfactoriamente.
Se incorporó y programó los temporizadores de manera correcta en la secuencia.
La simplicidad del método de programación en lenguaje de escalera representa una
ventaja sobre los demás métodos que tienen falencias en el control doble.
3.2.1.9.10 Cuestionario.
¿Qué función cumplen los temporizadores en la secuencia?
Son pausas que realiza el sistema para la acción de otros mecanismos sobre la secuencia.
¿La secuencia presentada es cíclica en esta práctica?
No, la secuencia de cuatro cilindros no es cíclica, para repetir los movimientos se debe
presionar el botón BA.
¿Cómo se haría repetitiva esta secuencia?
Para que sea cíclica se debe romper todos los pasos, a excepción del sistema, es decir, del
primer enclave.
133 1Página
CAPÍTULO IV
4.- ANALISIS E INTERPRETACION DE RESULTADOS
4.1 Pruebas y resultados de las simulaciones.
De las simulaciones se obtienen los siguientes resultados:
Como se ha visto dentro del capítulo 3, el diseño de secuencias electroneumáticas
mediante las metodologías secuencial y de programación en lenguaje ladder resulta ser
muy sencillo y asegura un funcionamiento óptimo en comparación con los demás
métodos.
La simulación de secuencias electroneumáticas ofrece ventajas como: el aprendizaje en
el control de dispositivos electroneumáticos, conocimiento del manejo y
programación de controladores lógicos programables, la capacidad de desarrollar
simulaciones de procesos electroneumáticos controlados mediante un PLC para
verificar el correcto funcionamiento del programa diseñado con alguna metodología
práctica.
El diseño de secuencias electroneumáticas mediante el lenguaje de programación
Ladder resulta ser muy eficaz y fácil de diseñar, pues simplifica el diseño de soluciones de
control aplicado a las secuencias electroneumáticas en comparación con las otras
metodologías de solución de secuencias. En el capítulo 2 se explicó que no se requieren
de pasos complicados para la configuración y programación usando Ladder como
lenguaje de programación.
Los software Automation Studio y CODESYS resultan ser herramientas muy importantes
para la realización de programas para el control de secuencias electroneumáticas
diseñadas en ladder y para obtener un buen funcionamiento del sistema.
El uso de la integración de software de programación y simulación FluidSim y CODESYS
comunicados a través de un servidor OPC forman un bloque único de simulación de
secuencias electroneumáticas que resulta ser una potente herramienta virtual para el
diseño, implementación y comprobación de la solución propuesta para la secuencia
electroneumática.
Como se podrá apreciar en el análisis de los métodos, al aumentar la complejidad de las
secuencias electroneumáticas, será más viable y recomendable el uso del método
secuencial o el lenguaje de programación ladder, por sobre el método estado-fase, paso a
paso o el método cascada.
134 1 Página
La elección de qué método usar para la solución de secuencias dependerá de las
herramientas, las habilidades, preferencias y conocimientos del profesional
asegurando que sea la mejor para el proceso electroneumático.
Como se puede apreciar en las prácticas el diseño mediante la metodología de
lenguaje Ladder representa un programa con menor cantidad de elementos en
comparación con los demás métodos, además de tener un correcto funcionamiento y
cumplir con los movimientos de la secuencia electroneumático dentro de un
ambiente virtual.
4.1.1 Fortalezas.
Está diseñado de una forma sencilla y de comprobación visual mediante diagramas. Es
decir que el manual trae una disposición de ejemplos establecidos más su respectivo
diagrama de solución el cual orienta al usuario cuando tenga alguna duda o problema al
momento de diseñar correctamente cualquier tipo de secuencia de trabajo.
Las prácticas se apoyan en software fáciles de utilizar, por lo tanto el alumno podrá luego
de diseñar el circuito electroneumático que se presente, verificarlo y simularlo con la
ayuda de diferentes software.
4.1.2 Oportunidades.
- Los alumnos necesitan una herramienta entendible para el estudio de la electroneumática
y se hace posible a través de descripciones de elementos y métodos de resolución que
ayudan y facilitan al usuario en la posibilidad de diseñar circuitos electroneumáticos
sustentados en con software.
4.1.3 Debilidades.
La falta de elementos físicos neumáticos y electroneumáticos para complementar el uso
del módulo con prácticas reales. Refiriéndonos a lo complejo que puede ser por distintos
motivos como la adquisición de elementos reales debido a altos costos.
Falencias en el manejo de los software, pese a ser relativamente sencillos el manejo de lo
software puede presentar vacíos en el alumno por falta de preparación o manipulación.
135 ¡Página

CAPÍTULO V
5.- CONCLUSIONES Y RECOMENDACIONES
5.1 CONCLUSIONES.
El módulo cuenta con la metodología para el diseño y construcción de circuitos
electroneumáticos, los cuales pueden ser de gran ayuda en la elaboración de
sistemas de automatización, como los usados actualmente en la industria.
El módulo de control electroneumático constituye una herramienta eficiente en la
consolidación de los conocimientos en el área de electroneumática para los estudiantes de
la Escuela de Ingeniería Electrónica y Telecomunicaciones ya que presenta los contenidos
básicos de manera sencilla, correcta, y con una adecuada secuencia en sus contenidos.
Las prácticas de laboratorio serán de utilidad para los estudiantes que cursan la carrera
de Ingeniería Electrónica y Telecomunicaciones, en la aplicación de los principios
teóricos de asignaturas relacionadas con el área de control y automatización.
El desarrollo del módulo se realizó basándose en la necesidad que existe para realizar
prácticas en el área de Electroneumática en la Escuela de Ingeniería Electrónica y
Telecomunicaciones.
Se cumplieron satisfactoriamente los objetivos planteados en este trabajo llevando a
cabo el diseño y simulación del módulo de sistemas Electroneumáticos.
Cada una de las prácticas planteadas fue diseñada y simulada mediante software como
Automation Studio, FluidSIM y CODESYS con un grado de dificultad ascendente.
Permiten al alumno resolver diversos tipos de secuencias a través de métodos y solucionar
problemas de diseño y electroneumático.
A través del módulo y software se puede comparar y comprobar secuencias de trabajo de
circuitos electroneumáticos.
136 1Página

5.2 RECOMENDACIONES.
Es recomendable implementar y comprobar el funcionamiento de las prácticas en los
software de simulación ya mencionados.
Al momento de realizar la ejecución de cada práctica preestablecida el estudiante
debe verificar que los enlaces entre los solenoides y electroválvulas sean correctos, así
como el módulo de comunicación del PLC para la utilización de las salidas y entradas
respectivamente.
Es necesario que los estudiantes realicen las prácticas en el orden ascendente como
están distribuidas en el módulo.
Se debe configurar de forma correcta los softwares de simulación y programación Codesys
y FluidSim conectados mediante el servidor OPC para verificar el buen funcionamiento
dentro de un ambiente virtual de la solución propuesta con el lenguaje ladder para las
secuencias electroneumáticas planteadas.
En el método de programación Ladder asegúrese de reiniciar el sistema mediante el
rompimiento de todos los enclaves.
En cada método analice y verifique que no se produzcan cruce de señales en las
electroválvulas biestables.
137 ¡Pág- ina

BIBLIOGRAFIA
"Neumática e Hidráulica". CREUS, A.
https://books.google.com.pe/books?id=V RiOrxMEw4C&printsec=frontcover&dq=NEUM
ATICA+E+H IDRAULICA+CREUS&h1=es&sa=X&ved=0CBwQ6AEwAGoVChM lifyd04P0xg1Vkfq
ACh1WGwKeiciii=onepage&q=N EU MATICA%20E%20H I DRAU LICA%2OCREUS&Halse
"Automatización Electroneumática Industrial". MICRO.
http://es.scribd.com/doc/98778765/Manual-Automatizacion-Electroneumatica-
Industrialttscribd
"Neumática Electroneumática Fundamentos". FESTO.
http://www.festo-
didactic.com/ov3/media/customers/1100/573031 lb pep extracto es.pdf
"Control electroneumático y electrónico". John Hyde.
https://books.google.com.pe/books?id=N4zt-
YNZD5UC&pg=PR11&lpg=PR11&dq=electroneumatica+libro&source=bl&ots= aZt5r KXT&
sig=V967013gUbQuuSYKPsy2KQqbJ8E&h1=es&sa=X&ei=QTnCVPiSJIm4ggTei4SQDA&ved=0
CB0Q6AEwADgK#v=onepage&q=electroneumatica%2Olibro&f=true
"Manual consultivo de control neumático y electroneumático utilizando el software FESTO
fiuidSIM". Jairo David Centeno.
http://repositorio.utc.edu.ec/handle/27000/604
"Circuitos Básicos de Ciclos Neumáticos y Electroneumáticos". Vicente Lladonosa Giró.
https://books.google.com.pe/books?id=57TaED7QxwOC&printsec=frontcover&hi=es&sour
ce=gbs ge summary r&cad=0#v=onepage&q&f=false
"Neumática Práctica". A. Serrano Nicolás.
https://books.google.com.pe/books?id=-
lUVsZSC6GsC&pg=PA301&lpg=PA301&dq=anulacion+se%C3%B1ales+permanentes+neum
atica&source=bl&ots=7orzMFzS8H&sig=FKk5gtS0eyPeQhQzMNsniDape7E&h1=es&sa=X&e
i=NhuTVfSCI4magwTE5oDQCg&ved=OCEMQ6AEwBg#v=onepage&q=anulacion%20se%C3
%B1ales%2Opermanentes%2Oneumatica&f=true
138 1Página
"Design & Simulation of Electro-Pneumatic System Using PLC Automation Studio". Aya
Moowafaq Abd Elsatar.
http://www.uotechnology.edu.iq/dep-cse/Rraduationprojects/2009-2010/aya.pdf
"AUTOMATIZACIÓN NEUMÁTICA Y ELECTRONEUMÁTICA".Salyador Millán Teja
https://books.gooRle.com.pdbooks?id=pC V1pPEMJ4C&printsec=frontcoyer&h1=es&sour
ce=Rbs Re summary r&cad=01ty=onepage&q&f=false
"FluidSIM® 5 Manual".Festo Didactic.
http://www.fluidsim.com/fluidsim/download/y5/fluidsim5 es.pdf
"AUTOMATION STUDIO". User's Guide
http://www.tekniikka.oamk.fir-penttihu/hydrauliiariestelmat/automationstudio/AS4 GUI
EF01 008.pdf
139 I Página

APENDICES
SIMBOLOGIA NEUMÁTICA
Regulador de presión
—
Fuente de presión neumática
,
V
Cilindro de simple efecto
ir k.„ Al
Silenciador
Válvula estranguladora anti retorno
-:.\.." ,.,. i ------ 1
'..-
Cilindro de doble efecto
e
rjeIjp
Válvula estranguladora O
'7.--• —
Filtro _ I
Grupo de acondicionamiento del aire (FRL) •
. in>
•
MI
— • —I
'
Compresor (›
, , 1
Lubricador .• ..
140 1Página

Grupo de acondicionamiento del aire
(representacion simplificada)
Electroválvula 5/2 biestable
C7£111 _i_Tkil
Manómetro
I. ...;
Filtro y separador ",
f
SIMBOLOGIA ELECTRICA
Relevador o
o
Motor eléctrico
Contacto normalmente abierto (LADDER) .•4--] _.,
Contacto normalmente cerrado (LADDER)
Electroválvula
1 o
Interruptor de posición mecánica normalmente abierto
1' -
Interruptor de posición mecánica normalmente cerrado
Fuente de alimentación '.)
c:
Solenoide O--I\/-0.
Contacto normalmente abierto \T
1
Contacto normalmente cerrado 17-,
I)
Común 7".. 1 0V )
j:
141 1 Página

Botón pulsador normalmente abierto 0
E, \ 0
Botón pulsador normalmente cerrado
o Interruptor detector de proximidad
normalmente abierto I
d.
Interruptor detector de proximidad
normalmente cerrado 11,
1
SIMBOLOGIA DE SENSORES
Sensor magnético 4),
LE —.1..,
o
Sensor capacitivo O
0 _--<__. 1 I'
—0
O
Sensor inductivo c.
_
Sensor de proximidad /1>
o
Sensor óptico (.1) .--- n')
14' *s1r
142 !Página