Universidad Nacional de La Plata - fcnym.unlp.edu.ar · en ese orden a la matriz C. mxp. que tiene...
46
1 Universidad Nacional de La Plata Facultad de Ciencias Naturales y Museo Cátedra de Matemática y Elementos de Matemática Asignatura: Elementos de Matemática Contenidos de la Unidad Temática Matrices: Suma y producto por un escalar. Propiedades. Producto entre matrices. Matrices sociométricas. Matriz inversa. Determinantes: definición y propiedades. Desarrollo de un determinante por los elementos de una línea. Resolución de sistemas de ecuaciones lineales: Regla de Cramer, Eliminación de Gauss, método matricial. Resolución aproximada de sistemas incompatibles: solución matricial. Ing. Carlos Alfredo López Profesor Titular
Transcript of Universidad Nacional de La Plata - fcnym.unlp.edu.ar · en ese orden a la matriz C. mxp. que tiene...
1
Universidad Nacional de La Plata Facultad de Ciencias Naturales y Museo
Cátedra de Matemática y Elementos de Matemática
Asignatura: Elementos de Matemática
Contenidos de la Unidad Temática
Matrices: Suma y producto por un escalar. Propiedades. Producto entre matrices. Matrices sociométricas. Matriz inversa. Determinantes: definición y propiedades. Desarrollo de un determinante por los elementos de una línea. Resolución de sistemas de ecuaciones lineales: Regla de Cramer, Eliminación de Gauss, método matricial. Resolución aproximada de sistemas incompatibles: solución matricial.
Ing. Carlos Alfredo López Profesor Titular
2
Cátedra de Matemática y Elementos de Matemática
Ing. Carlos Alfredo López
MATRICES Además de las matrices que se definen teniendo en cuenta que sus
elementos provienen de una relación funcional, los datos que corresponden a la información recogida sobre diversos temas suelen ser organizados frecuentemente en tablas de una o más entradas mediante conjuntos numéricos cuyos elementos están ordenados por uno o más subíndices. Formalmente una tabla unidimensional se denomina vector mientras que una bidimensional se designa con el nombre de matriz.
Ejemplo :
En un viaje de campaña realizado por alumnos de la Facultad, se han organizado cuatro grupos A, B, C, D conectados mediante equipos de radio de modo tal que A solo puede comunicarse directamente con B y D ; B sólo puede comunicarse con A; C sólo puede comunicarse con D y D puede comunicarse con A y C. Presentar esta información mediante una matriz de orden 4, usando un 1 o un 0 para indicar si dos campamentos pueden comunicarse directamente o no.
→
0101100000011010
Solución
Ejemplo :
La tabla de posiciones del campeonato de fútbol es una tabla a doble entrada o bidimensional. Se trata de una matriz.
Considerando un espacio vectorial de n dimensiones, un vector puede
representarse mediante una matriz; los elementos de ésta son las componentes del vector y pueden escribirse en fila o en columna. Si la disposición es en una fila, la matriz resulta de dimensión 1xn y se llama matriz fila o también vector fila, mientras que si la disposición es en columna, el orden es mx1 y hablamos de matriz o vector columna.
Por ejemplo
=
321
A es una matriz columna de dimensión 3x1
Un caso particular lo constituye como ejemplo la matriz A = (3) de dimensión 1.

3
Teniendo en cuenta lo hasta aquí expresado, una matriz puede prácticamente ser considerada como la yuxtaposición ordenada de matrices fila o como una yuxtaposición ordenada de matrices columna.
Simbolizando con Fi la fila i y con Cj la columna j, podemos escribir:
( )4321
3
2
1
34333231
24232221
14131211
CCCCFFF
aaaaaaaaaaaa
A =
=
=
Álgebra Matricial:
Igualdad.
Dos matrices son iguales si tienen el mismo orden y los elementos ubicados en la misma posición son iguales.
Ejemplo :
Hallar los valores de x, y, z, w si se satisface la igualdad:
=
4153
w-zy-xw+2zy+x
igualando elemento a elemento correspondiente, resulta :
x + y = 3
2z + w = 5 x - y = 1 z - w = 4
sistema de ecuaciones lineales cuya solución es : { x = 2 ; y = 1 ; z = 3 ; w = -1}
Suma de matrices:
Si tenemos en cuenta que las filas o las columnas de una matriz pueden
considerarse como vectores fila o como vectores columna, la operatoria entre matrices deberá seguir las reglas de la operatoria entre vectores y dado que, los vectores se suman elemento a elemento correspondiente, definiremos en forma análoga la suma entre dos matrices con el agregado de que, para que dos matrices resulten sumables deben ser del mismo orden. La suma entre matrices de distinta dimensión no está definida.
Dadas entonces las matrices A = (aij) y B = (bij) ambas de orden mxn, la
suma resultará ser una matriz C = (cij) de la misma dimensión de los sumandos, cuyos elementos se obtendrán haciendo la suma de los elementos correspondientes de las matrices dadas.
Amxn + Bmxn = Cmxn ; con (cij) = (aij) + (bij)

4
Ejemplo :
Si
−
−=
123132
123312
=B y A
C = A + B =
046424
Producto de una matriz por un escalar:
La operación tiene las mismas características que el producto de un
vector por un escalar: todos los elementos de la matriz quedan multiplicados por el escalar y se conserva la dimensión de la matriz.
Demostración:
Sea la matriz A =
2221
1211
aaaa
y el escalar λ = 2 ; la operación
2
2221
1211
aaaa
=
2221
1211
aaaa
+
2221
1211
aaaa
=
2221
1211
2222aaaa
verifica que cada elemento de la matriz original queda multiplicado por el escalar 2
Habiéndose definido para el conjunto de las Matrices las operaciones de
suma y de producto por un escalar, con las propiedades correspondientes que hemos detallado, decimos que este conjunto tiene estructura de Espacio Vectorial.
Ejemplo : (Válido para las operaciones descritas de suma y producto por un escalar )
Hallar los valores de x, y, z y w que satisfacen:
+
++
−
=
4
21
52
wzyx
wx
wzyx
+++−+++
=
41
522222
wwzyxx
wzyx
igualdad de matrices que da origen por igualación de sus elementos correspondientes al siguiente sistema de ecuaciones lineales:
2x = x+2 → x =2 → x = 2 2y = 5+x+y → y = x +5 → y = 2+5 = 7 2z = -1+z+w → z = w - 1 → z = 4 -1 = 3 2w = w+4 → w = 4 → w = 4

5
la solución es entonces el conjunto {x = 2 ; y = 7 ; z = 3 ; w = 4} Producto entre Matrices:
Es una operación cuyo resultado, si existe, depende del orden en que se
coloquen los factores y sólo es posible cuando el número de columnas de la primera matriz es igual al número de filas de la segunda.
Comencemos por tratar de multiplicar una matriz fila
A1xn = (a11 a12........a1n) por una matriz columna Bmx1 =
1
21
11
...
...
mb
bb
; con m=n llamamos entonces
producto A1xm x Bmx1 = C1x1
a la matriz cuyo único elemento es c = a11 b11 + a12 b21 + ............. + a1n bm1
se trata del producto escalar entre la matriz o vector fila A1xm
y la matriz o vector columna Bmx1.
Observamos que para que el producto resulte posible el número de elementos de los vectores fila de la primera matriz del producto debe ser igual al número de elementos de los vectores columna de la segunda matriz. Lo dicho significa que la dimensión de los vectores fila de la primera matriz del producto debe ser igual a la dimensión de los vectores columna de la segunda matriz.
Esta última razón es la que ha posibilitado decir que para que el
producto entre dos matrices resulte posible el número de columnas de la primera matriz debe ser igual al número de filas de la segunda.
Ejemplo :
Sean A1x3 = (3 2 -1) y B3x1 =
− 312
; obtener A1x3 x B3x1 = C1x1
(3 2 -1)
− 312
= ( ) )11()326()3)(1(1223 =++=−−+⋅+⋅ = C1x1
Sean ahora las matrices Amxn = (aij) ; i = {1,2,.....,,m} ; j = {1,2,.......,n}
Bnxp = (bij) ; i = {1,2,......,,n} ; j = {1,2,........,p}
6
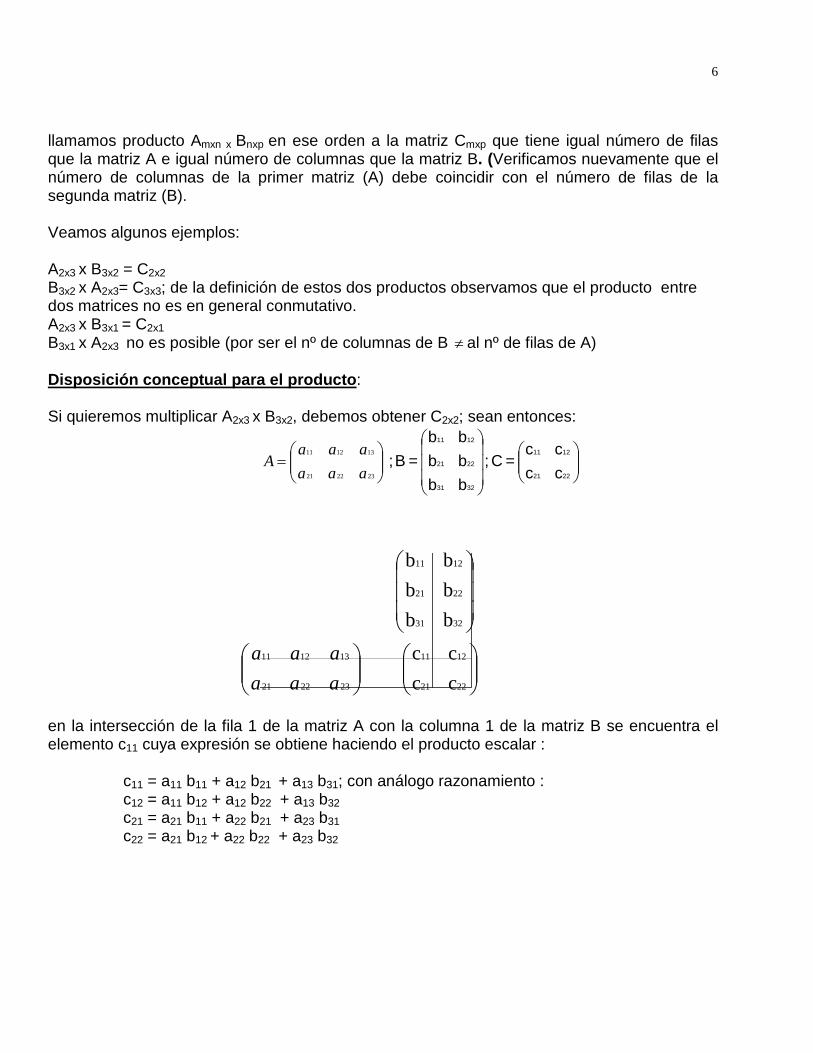
llamamos producto Amxn x Bnxp en ese orden a la matriz Cmxp que tiene igual número de filas que la matriz A e igual número de columnas que la matriz B. (Verificamos nuevamente que el número de columnas de la primer matriz (A) debe coincidir con el número de filas de la segunda matriz (B). Veamos algunos ejemplos: A2x3 x B3x2 = C2x2
B3x2 x A2x3= C3x3; de la definición de estos dos productos observamos que el producto entre dos matrices no es en general conmutativo. A2x3 x B3x1 = C2x1
B3x1 x A2x3 no es posible (por ser el nº de columnas de B ≠ al nº de filas de A)
Disposición conceptual para el producto: Si quieremos multiplicar A2x3 x B3x2, debemos obtener C2x2; sean entonces:
=
2221
1211
3231
2221
1211
cccc
= C ; bbbbbb
= B ; 232221
131211
aaaaaa
A
2221
1211
232221
131211
3231
2221
1211
cccc
bbbbbb
aaaaaa
en la intersección de la fila 1 de la matriz A con la columna 1 de la matriz B se encuentra el elemento c11 cuya expresión se obtiene haciendo el producto escalar :
c11 = a11 b11 + a12 b21 + a13 b31; con análogo razonamiento : c12 = a11 b12 + a12 b22 + a13 b32 c21 = a21 b11 + a22 b21 + a23 b31 c22 = a21 b12 + a22 b22 + a23 b32
7
DETERMINANTES: DEFINICIÓN: Un determinante es una función cuyo dominio es el conjunto de las matrices cuadradas y cuya imagen es el conjunto de los números reales. Para cada matriz particular el número que representa su determinante asociado se obtiene sumando todos los productos posibles en los cuales haya un elemento de cada fila y uno de cada columna, dependiendo el signo de cada producto de la clase de la clase de la permutación (ver capítulo sobre Análisis combinatorio) de sus subíndices.
Como cada elemento de un determinante tiene dos subíndices, si
tenemos la precaución de colocar en cada producto uno de los subíndices, por ejemplo el primero, en orden natural, la clase de la permutación de los segundos subíndices será responsable del signo del producto. Ejemplificamos para un producto cualquiera de un determinante de orden cuatro: tomemos para analizar el producto 41322314 aaaa ; en él los primeros subíndices están colocados en orden natural; en consecuencia los segundos subíndices determinarán el signo del producto.
Para encontrar la clase de la permutación estudiamos el orden 4321,
comparando cada elemento con los siguientes: así el 4 presenta una inversión con el 3, otra con el 2 y una tercera con el 1; el 3 una inversión con el 2 y otra con el 1; el dos una inversión con el 1; en total hay seis inversiones, la clase de la permutación es par y el signo es positivo.
Para el producto cuyos subíndices son 4312, utilizando el mismo
procedimiento puede demostrarse que hay cinco inversiones; la clase de la permutación es impar y el signo correspondiente del producto es negativo.
Un mecanismo distinto consiste en colocar la permutación a estudiar sobre el orden natural correspondiente; se unen mediante trazos los números iguales y se cuentan las intersecciones. El número de ellas indica la clase de la permutación; para el ejemplo que sigue hay cinco intersecciones; clase de la permutación impar, signo negativo. 4 3 1 2 1 2 3 4 DETERMINANTES DE ORDEN DOS.
Dados cuatro números a11, a12, a21 y a22, llamamos determinante de orden dos (dos filas y dos columnas) a: en el cual fila 1 : a11 a12 fila 2 : a21 a22
a a a a
11 12
21 22
8
columna 1 : a11 a21 columna 2 : a12 a22 Diagonal principal: a11; a22 Contra diagonal: a12; a21
Analizando el determinante puede observarse que cada elemento del mismo tiene dos subíndices; el primero corresponde a la fila y el segundo a la columna; así, el elemento a21 pertenece a la segunda fila (primer subíndice) y a la primera columna (segundo subíndice); en general podemos decir que el elemento genérico de un determinante, tiene la forma ai j , donde i indica la fila a la cual pertenece y j designa a la columna.
En estas condiciones decimos que un determinante de orden dos es un
número que se obtiene efectuando el producto de los elementos de la diagonal principal y restándole el producto de los elementos de la contradiagonal, o sea:
Los signos de los productos pueden verificarse estudiando la clase de la
permutación de los segundos subíndices: para el producto 2211 aa ⋅ como los segundos subíndices están en orden natural, el signo correspondiente es positivo, mientas que para el producto 2112 aa ⋅ los segundos subíndices presentan una inversión: clase de la permutación impar y en consecuencia, signo negativo.
Ejemplo: DETERMINANTES DE ORDEN TRES:
Sea en el que: fila 1 : a11 a12 a13 columna 1: a11 a21 a31 diagonal principal: a11 a22 a33 contra diagonal: a13 a22 a31
a a a a
a .a a .a11 12
21 22 11 22 12 21= −
3 - 1 2 - 1
3 . ( 1) ( 1) . 2 3 2 1= − − − = − + =
a a a a a a a a a
11 12 13
21 22 23
31 32 33
9
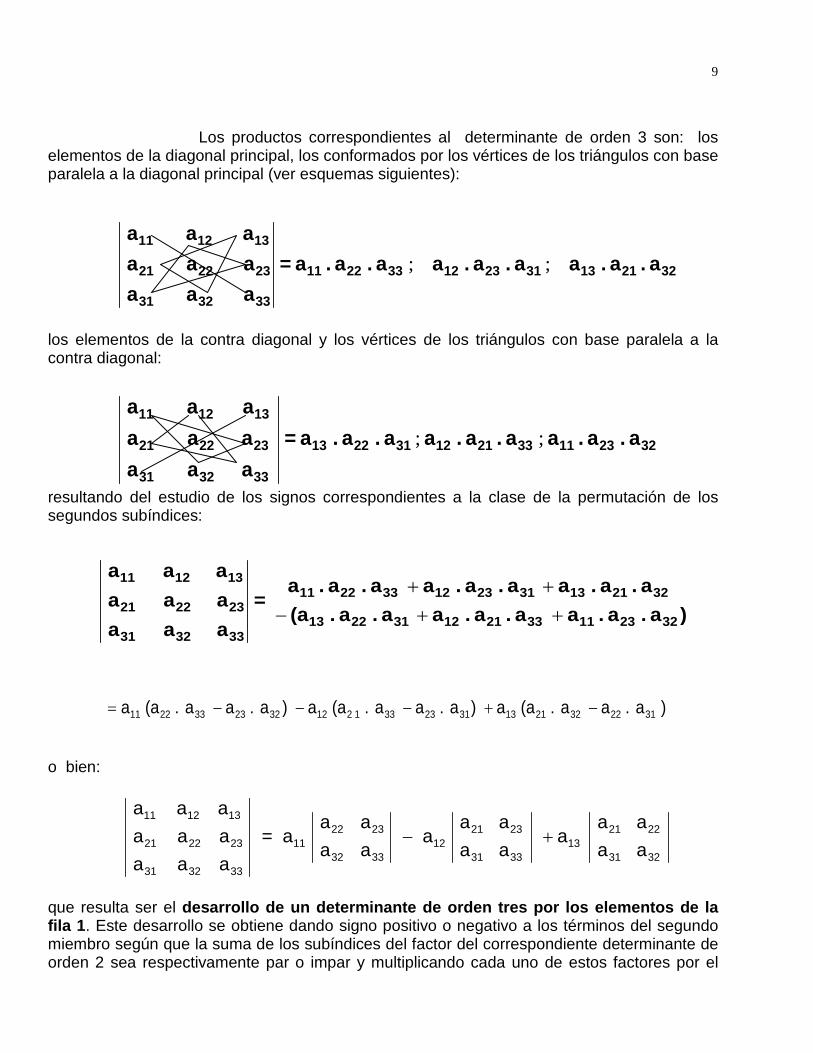
Los productos correspondientes al determinante de orden 3 son: los
elementos de la diagonal principal, los conformados por los vértices de los triángulos con base paralela a la diagonal principal (ver esquemas siguientes):
los elementos de la contra diagonal y los vértices de los triángulos con base paralela a la contra diagonal:
resultando del estudio de los signos correspondientes a la clase de la permutación de los segundos subíndices:
o bien:
que resulta ser el desarrollo de un determinante de orden tres por los elementos de la fila 1. Este desarrollo se obtiene dando signo positivo o negativo a los términos del segundo miembro según que la suma de los subíndices del factor del correspondiente determinante de orden 2 sea respectivamente par o impar y multiplicando cada uno de estos factores por el
32 21 13 31 23 12 33 2211
33 3231
23 2221
13 1211
a .a .aa .a .aa .a . a = a a a a a a a a a
;;
32 23 11 33 21 12 312213
33 3231
23 2221
13 1211
a .a .aa .a .aa . a . a = a a a a a a
a a a ;;
)a .a .aa .a .aa .a .(aa .a .aa .a .aa .a .a
= a a a a a a a a a
32 23 11 33 21 12 31 22 13
32 21 13 31 23 12 33 22 11
33 3231
23 2221
13 1211
++−++
= − − − + −a (a . a a . a ) a (a . a a . a ) a (a . a a . a )11 22 33 23 32 12 2 1 33 23 31 13 21 32 22 31
a a a a a a a a a
= a a a a a
a a a a a
a a a a a
11 12 13
21 22 23
31 32 33
1122 23
32 3312
21 23
31 3313
21 22
31 32
− +

10
subdeterminante que se obtiene al eliminar en el determinante de orden tres la fila y la columna que corresponden al elemento considerado. Estos subdeterminantes reciben el nombre de Menor Complementario del factor correspondiente. Ejemplos de menor complementario:
Menor complementario del elemento a11 3332
232211 aa
aa=→ α
Menor complementario del elemento a23 3231
121123 aa
aa=→ α
ADJUNTO O COFACTOR del elemento de un determinante:
Es el menor complementario, precedido de signo más o de signo menos, según que la suma de los subíndices del elemento considerado resulte par o impar. Ejemplos de adjunto o cofactor:
Adjunto o cofactor del elemento a11 3332
23221111 aa
aaA ==→ α
Adjunto o cofactor del elemento a23 3231
12112323 aa
aaA −=−=→ α
Generalizando: ( )ij
jiijA α+−= 1 Si la suma i+j es par el resultado de –1(i+j) es positivo (menor
complementario y adjunto coinciden), mientras que si i+j es impar, el menor complementario y el adjunto son de distinto signo.
De acuerdo con las definiciones de menor complementario y de adjunto
o cofactor, el desarrollo de un determinante por los elementos de una linea:
puede expresarse:
131312121111 ααα ⋅+⋅−⋅= aaaA (desarrollo por menores complementarios)
o bien: 131312121111 AaAaAaA ⋅+⋅+⋅= (desarrollo por adjuntos) que puede expresarse: el desarrollo de un determinante por los elementos de una línea es igual a la suma de los productos de los elementos de dicha línea por sus respectivos adjuntos.
3231
2221 13
3331
2321 12
3332
232211
33 3231
23 2221
13 1211
a a a a
a a a
a a a
a a a a
a = a a a a a a a a a
A +−=

11
Ejemplo de resolución de un determinante de orden tres:
Otro método para resolver un determinante de 3 por 3 (el método solo
vale para determinantes de ese orden) consiste en utilizar la denominada Regla de SARRUS. Para ello repetimos debajo del determinante sus dos primeras filas y el resultado lo obtenemos como la suma de los productos de los elementos de la diagonal principal y los productos de los elementos de las diagonales paralelas a la diagonal principal, menos la suma de los productos de los elementos de la contra diagonal y los productos de los elementos de las diagonales paralelas a dicha contra diagonal, es decir:
Ejemplo: Actividad: Calcular el valor de los siguientes determinantes:
}{ 5d ; 8c , 0b ; 1a para d cb a
c) ; 1/41/3
3- 6 b) ;
1523
) =======a
d) Para los siguientes determinantes, resolver en todos los casos desarrollando por los elementos de una línea y verificando el resultado por la Regla de Sarrus.
{ }2c 1,b 2;a para 2 4 12 3 5c b a
; 0 5 12 1 40 2 3
=====
2 1 1 1 1 - 2 3 2 -1
2 1 2 2 1
( 1) 1 2 3 1
1 1 1 3 2
2 ( 1 4) 1 ( 1 6) 1 (2 3) 6 5 1 10
−=
−−
− −−−
+ =
= − + + − + + − == + − =
a a a a a a a a a
a . a . a a . a . a a . a . aa . a . a a . a . a a . a . a
a a a a a a
11 12 13
21 22 23
31 32 33
11 22 33 21 32 13 31 12 23
13 22 31 23 32 11 33 12 21
11 12 13
21 22 23
=+ +
− − −
2 1 1 1 2 3 2 1
2 1 1 1 2 1 3 1 21 1 3 2 2 2 1 1 1
2 2 6 3 8 1 10
. . ( ) . . . ( ) . ( ) . . ( ) . . ( ) . ( ) .
−−−
=− + + − − −
− − − − − − =
= − + + − + − =
1

12
{ }3z , 2y ; 1x para z 4 3y 2 1
x3 0 ====
0 x1 2
2 1 03 1 2
:en x de valor elHallar =
PROPIEDADES DE LOS DETERMINANTES.
1) Si se intercambian filas por columnas, ordenadamente, el valor del determinante no se modifica. Ejemplo:
103214
3124
==
2) Si se intercambia la posición de dos líneas (filas o columnas) paralelas, cambia el
signo del resultado del determinante
102431
;103124
−==
3) Si un determinante tiene dos líneas paralelas iguales, su valor es nulo.
0882424
=−=
4) Si se multiplican todos los elementos de una línea por una constante, el determinante queda multiplicado por esa constante.
301033124
3312343
;103124
=⋅=⋅=⋅⋅
=
5) Si un determinante tiene dos líneas paralelas proporcionales, su valor es nulo.
016162448
=−=
6) La suma de los productos de los elementos de una línea por los adjuntos de una línea paralela da resultado nulo.
Si: 0; 132312221121
333231
232221
131211=⋅+⋅+⋅ AaAaAa
aaaaaaaaa
(la suma de los productos de
los elementos de la fila 2 por los adjuntos de la fila 1 vele cero; en efecto; como puede comprobarse el desarrollo de esta expresión se corresponde con:
13
333231
232221
232221
aaaaaaaaa
que resulta ser un determinante con dos líneas paralelas iguales y, por tal razón, nulo. 7) Un determinante cualquiera puede desdoblarse en la suma de dos determinantes que
tienen todas sus líneas menos una iguales y las restantes tales que sumados sus elementos correspondientes se obtiene la otra fila del determinante desdoblado.
333231
232221
131312121111
333231
232221
131211
333231
232221
131211
aaaaaa
bababa
aaaaaabbb
aaaaaaaaa +++
=+
8) Si a los elementos de una línea de un determinante se le suman los elementos
correspondientes de una línea paralela multiplicados por una constante, el valor del determinante no se modifica.
333231
232221
131211
aaaaaaaaa
=
333231
232221
231322122111
aaaaaa
aaaaaa ⋅+⋅+⋅+ λλλ
=
333231
232221
232221
333231
232221
131211
aaaaaa
aaa
aaaaaaaaa ⋅⋅⋅
+λλλ
=
333231
232221
131211
aaaaaaaaa
ya que el
segundo término del primer miembro de la igualdad anterior es nulo por tener el determinante dos líneas paralelas proporcionales. Cálculo de un determiante mediante la reducción de su orden:
Las transformaciones que hemos detallado adquieren particular
importancia cuando se trata de resolver determinantes de orden superior a tres. Si esto sucede se realizan transformaciones en las filas o columnas del determinante teniendo en cuenta que, cuando a los elementos de una línea se le suman los elementos correspondientes de una línea paralela multiplicados por una constante, el valor del determinante no se modifica y que, si multiplicamos todos los elementos de una línea por una misma constante, el determinante queda multiplicado por esa constante.
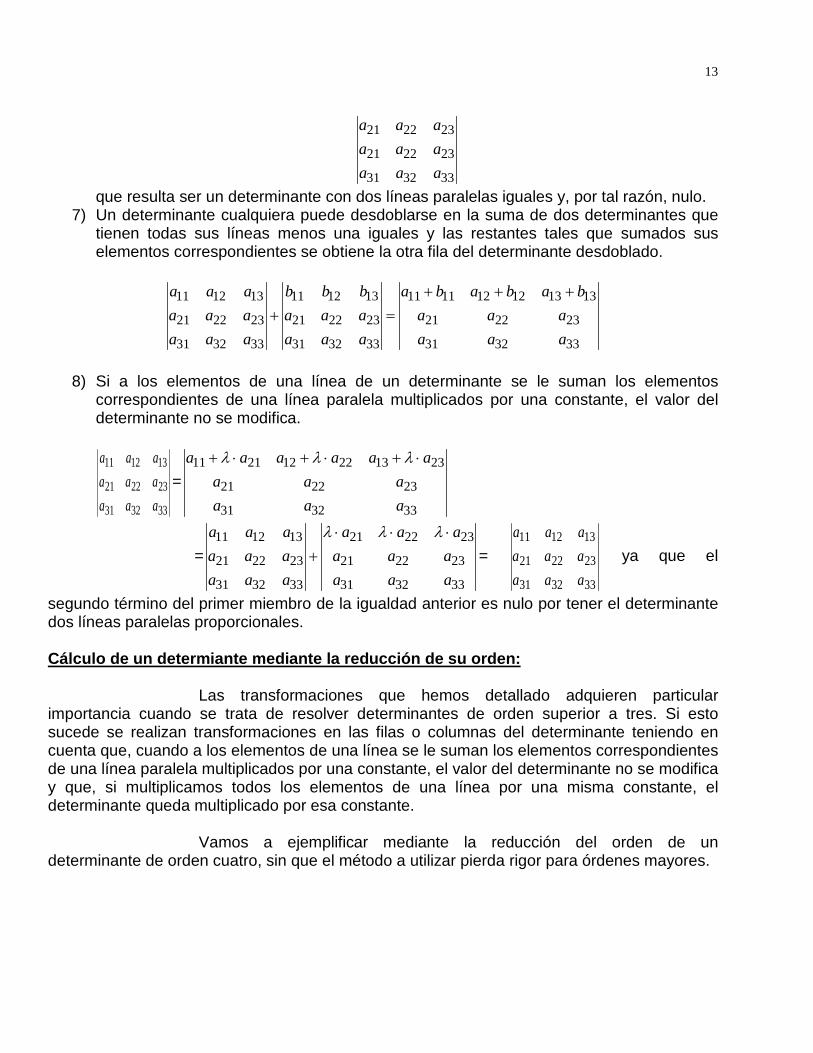
Vamos a ejemplificar mediante la reducción del orden de un
determinante de orden cuatro, sin que el método a utilizar pierda rigor para órdenes mayores.

14
Sea
2344123332524321
; escribiremos a la izquierda de cada determinante las
transformaciones a realizar (por ej. F2 - 2F1 indica que a los elementos de la fila 2 se le restarán los elementos correspondientes de la Fila 1 multiplicados por 2.
434252619
3425026190
541
43
14941173
541
14940117305410
4321
432
2344123332524321
13
12
1
14
13
12
1
−==−−
=−−=
−−=
−−−−−−−−
=
−−−
=FFFF
F
FFFFFF
F
MATRIZ DE LOS ADJUNTOS.
Recibe este nombre aquella matriz que se obtiene a partir de una matriz cuadrada dada, reemplazando cada elemento por su adjunto.
Ejemplo: Si
=
=
333231
232221
131211
333231
232221
131211;
AAAAAAAAA
Adjaaaaaaaaa
A
MATRIZ INVERSA: La inversa de una matriz respecto del producto tiene una gran importancia en el álgebra matricial. La resolución de sistemas de ecuaciones lineales, incluso los sistemas incompatibles que requieren solución aproximada, está estrechamente ligada a la inversión de matrices, como veremos mas adelante.
Definiciones: a) para las matrices rectangulares:
Dada una matriz ( )mxnA con m>n, si existe una matriz ( )nxmL (L del inglés
left = izquierda) tal que: ( )nxmL ٠ ( )mxnA = ( )nxnI
se dice que ( )nxmL es una inversa por la izquierda de ( )mxnA .
Con similar razonamiento, si ( )mxnA es una matriz con m<n y existe una matriz nxmR (R: del inglés right = derecha) tal que:
( )mxnA ٠ nxmR = ( )mxmI

15
se dice que nxmR es una inversa por la derecha de A. NOTA 1: Suele designarse la inversa de las matrices rectangulares, con el nombre de Matriz Pseudoinversa y, en general se simboliza con +A . b) para las matrices cuadradas:
En el caso particular de las matrices cuadradas, es decir, con igual número de filas y de columnas resulta posible en algunos casos, que exista una misma matriz inversa por la izquierda y por la derecha: la simbolizamos A-1 verificándose:
IAAAA =⋅=⋅ −− 11
Si la doble igualdad anterior se cumple, la matriz A será regular (su determinante asociado será distinto de cero) en caso contrario A será una matriz singular y no existirá la matriz inversa. NOTA 2: Como la técnica para obtener la matriz pseudoinversa se basa en el conocimiento de la inversa de las matrices cuadradas, comenzaremos ejemplificando el: Cálculo de la inversa de una matriz cuadrada y regular.
Ejemplo:
=
4123
ASi con su determinante asociado 01012434123
≠=⋅−⋅==A
llamamos matriz inversa
=−
42
311xxxx
A si se verifica: IAAAA =⋅=⋅ −− 11 .
Reemplazando valores:
=
⋅
1001
4123
42
31xxxx
y desarrollando el producto entre las
matrices del primer miembro e igualando componentes, se obtiene:
( )( )( )( )414130412023
1123
43
21
43
21
=+=+=+=+
xxxxxxxx
con las cuatro ecuaciones escritas podemos formar dos sistemas de dos ecuaciones lineales; (1) con (3) y (2) con (4) según se detalla:
( )( )3041
1123
21
21
=+
=+
xx
xx y
( )( )4141
2023
43
43=+=+
xxxx

16
sistemas que resueltos, permiten encontrar los elementos de la matriz inversa. Una vez obtenidos los mismos, resta verificar que la matriz encontrada es la inversa de la dada, para lo cual basta con aplicar la definición, realizando el producto entre la matriz dada y la hallada, que deberá arrojar como resultado la matriz identidad. Actividad: Completar de acuerdo con lo indicado, el cálculo de la matriz inversa. NOTA 3: la obtención de la matriz inversa por aplicación del producto de matrices puede realizarse con relativa facilidad hasta matrices de orden tres, para las cuales es necesario escribir nueve ecuaciones que conforman tres sistemas de tres ecuaciones lineales con tres incógnitas. Para órdenes mayores, utilizaremos otro método que desarrollaremos en esta unidad.
Propiedades de la inversión de matrices:
En las matrices regulares se verifican las siguientes propiedades de la
inversión:
I1) 1−A es única por izquierda o por derecha. I2) ( ) AA =
−− 11 I3) 111)( −−− ⋅=⋅ AA λλ
I4) ( ) 111 −−− ⋅=⋅ ABBA Demostración: ( ) ( ) IBABA =⋅⋅⋅ −1
( ) ( ) 111 −−− =⋅⋅⋅⋅ BBBABA
( ) 11 −− =⋅⋅ BABA ( ) 1111 −−−− ⋅=⋅⋅⋅ ABAABA
Obtención de la matriz pseudoinversa.
a) Matriz pseudoinversa por la izquierda:(para matrices de mayor número de filas
que de columnas)
Recordamos: ( )nxmL ٠ ( )mxnA = ( )nxnI
La matriz ( )nxmL puede calcularse construyendo la matriz (nxn)
MAAt =⋅ Si el determinante de . ( M ) 0≠ , existe 1−M y puede escribirse:
MMAAM t ⋅=⋅⋅ −− 11 o lo que es igual:
ALIAAM t ⋅==⋅⋅−1
de donde:

17
tAML ⋅= −1
b) Matriz pseudoinversa por la derecha:
Recordando que: ( )mxnA ٠ nxmR = ( )mxmI para m<n , la matriz nxmR se calcula
construyendo MAA t =⋅ ; si det. ( M ) ≠ 0, existe 1−M y puede escribirse: A٠At٠T-1 = I = A٠R
de donde: RAIMAA t ⋅==⋅⋅ −1 1−⋅= MAR t
Ejemplo 1: Calcular la matriz pseudoinversa de
−=
111111
A
=
−⋅
−
=3113
111111
111111
M
como det. ( M ) = 8, existe la matriz inversa 1−M =
−
−3113
81 (verificar aplicando la
definición de matriz inversa), y entonces: tAML ⋅= −1 =
−
=
−
⋅
−
−242242
81
111111
3113
81
Comprobación:
=
=
−⋅
−
==⋅1001
8008
81
111111
242242
81IAL
Si pretendemos ahora calcular para la misma matriz
−=
111111
A
la matriz inversa por la derecha, hacemos
=
−
⋅
−=
202020202
111111
11111'1
M ;
como ( ) 0202020202==MDet , resulta que la matriz inversa por la derecha no existe
cuando m>n.

18
Ejemplo 2: Calcular la matriz pseudoinversa por la derecha de:
=
101010
A ;
calculamos
=
⋅
=
2001
100110
101010
M ; siendo 2)( =MDet
=→ −
1002
211M
y
=
⋅
=⋅= −
100210
21
11002
100110
211MAR t
Comprobación:
IRA =
=
=
⋅
=⋅
1001
2002
21
100210
101010
201
queremos verificar ahora que
=
101010
A no tiene matriz pseudoinversa por la
izquierda; para ello hacemos
=
⋅
=⋅=
202020202
101010
100110
AAM t ; siendo ( ) 0=MDet , no existe la matriz
pseudoinversa por la izquierda.

19
CÁLCULO DE LA LMATRIZ INVERSA UTILIZANDO LA MATRIZ DE LOS ADJUNTOS.
Sean
=
=
333231
232221
131211
333231
232221
131211
AAAAAAAAA
Adjyaaaaaaaaa
A ; multiplicando tAdjA ⋅
⋅+⋅+⋅⋅+⋅+⋅⋅+⋅+⋅⋅+⋅+⋅⋅+⋅+⋅⋅+⋅+⋅⋅+⋅+⋅⋅+⋅+⋅⋅+⋅+⋅
=
=
⋅
333332323131233322322131133312321131
332332223121232322222121132312221121
3313332123111231322122111131312121111
332313
232212
312111
333231
232221
131211
AaAaAaAaAaAaAaAaAaAaAaAaAaAaAaAaAaAaAaAaAaAaAaAaAaAaAa
AAAAAAAAA
aaaaaaaaa
En la matriz resultante del producto puede observarse: a) los elementos de la diagonal principal son respectivamente la suma de los elementos de
las filas 1, 2 y 3 de la matriz A multiplicados por sus respectivos adjuntos que, como sabemos corresponde al desarrollo del determinante asociado a la matriz A.
b) los elementos ubicados fuera de la diagonal principal corresponden a la suma de los productos de los elementos de una línea multiplicados por los adjuntos de una línea paralela que, de acuerdo a la propiedad 6 de los determinantes, da resultado nulo.
De las observaciones realizadas en a) y b) se deduce:
IAAA
AA
AdjA t ⋅=
⋅=
=⋅
100010001
000000
IA
AdjAt=⋅
resultando de acuerdo con la definición de matriz inversa, que la misma puede ser obtenida
mediante la expresión: A
AdjAt
=−1 . Para obtener la matriz inversa, debe calcularse la matriz
de los adjuntos traspuesta y dividir sus elementos por el valor del determinante asociado a la matriz cuya inversa se calcula.
Debe tenerse especial cuidado en calcular primero el determinante
asociado a la matriz ya que, de ser éste nulo, no existirá la matriz inversa.
Importante: la expresión A
AdjAt
=−1 puede utilizarse para calcular, si existe, la matriz inversa
de una matriz cuadrada. No resulta válida como definición de matriz inversa.

20
Ejemplo: Calcular la matriz inversa de
=
234232241
A
Cálculo del determinante asociado:
0412160)4332(2)4222(4)3223(1234232241
≠=−+=⋅−⋅+⋅−⋅−⋅−⋅==A ;
lo que significa que la matriz admite matriz inversa. Cálculo de la matriz de los adjuntos:
−−−
−=
−
−−
−
=522
1362640
3241
2221
2324
3441
2421
2324
3432
2422
2323
Aaj
−−
−
−
=
−−
−
−
==
−−−−
= −
45
413
23
21
231
21
210
45
413
46
42
46
44
42
420
;5136
264220
1AA
AdjAdjt
t
Verificación:
234232241
−−
−
−
45
413
23
21
231
21
210
=
100010001

21
SISTEMAS DE ECUACIONES LINEALES
Ecuaciones. Resulta frecuente que, al finalizar el ciclo secundario, no se hayan
diferenciado suficientemente los conceptos de función y de ecuación. Mediante algunos ejemplos, en lo que sigue, trataremos de
conceptualizar esa diferencia. Como sabemos, una función del tipo:
f : R→R / f(x) = an.xn + an-1.xn-1 +...+ a1.x + a0. es una función polinómica en una variable. la igualdad f(x) = 0 o lo que es igual an.xn + an-1.xn-1 +...+ a1.x + a0= 0 se denomina ecuación entera en una variable o incógnita asociada a f(x). Ejemplo 1:
Sea la función polinómica: f : R → R / f(x) = 2 x – 1; el cero o la raíz de esta función es el número real cuya imagen es nula; o sea el número real que satisface la igualdad: 2 x - 1 = 0
La igualdad precedente es la ecuación asociada a la función f(x).
Ejemplo 2:
Sea la función polinómica: f : R → R / f(x) = x2 + x – 2; la ecuación
asociada a f(x) será en este caso x2 + x - 2 = 0 Ejemplo 3:
Sea la función polinómica: f : R→R / f(x) = x2 + 1 la ecuación asociada a f(x) será ahora: x2+ 1 = 0 Raices de una ecuación entera en una variable.
De acuerdo con lo visto, la ecuación del ejemplo 1: 2 x - 1= 0
se satisface para x =1/2; en efecto:
Decimos en estas condiciones, que ½ es raíz o solución de la ecuación, siendo raíz o cero de la función polinómica que le dio origen.
Con similar razonamiento, la ecuación: x2 + x - 2 = 0 del ejemplo 2
se satisface para x = 1 y x = -2 ya que:
2 12
1 1 1 0. − = − =
22
12 + 1 - 2 = 0 (-2)2 + (-2) - 2 = 0
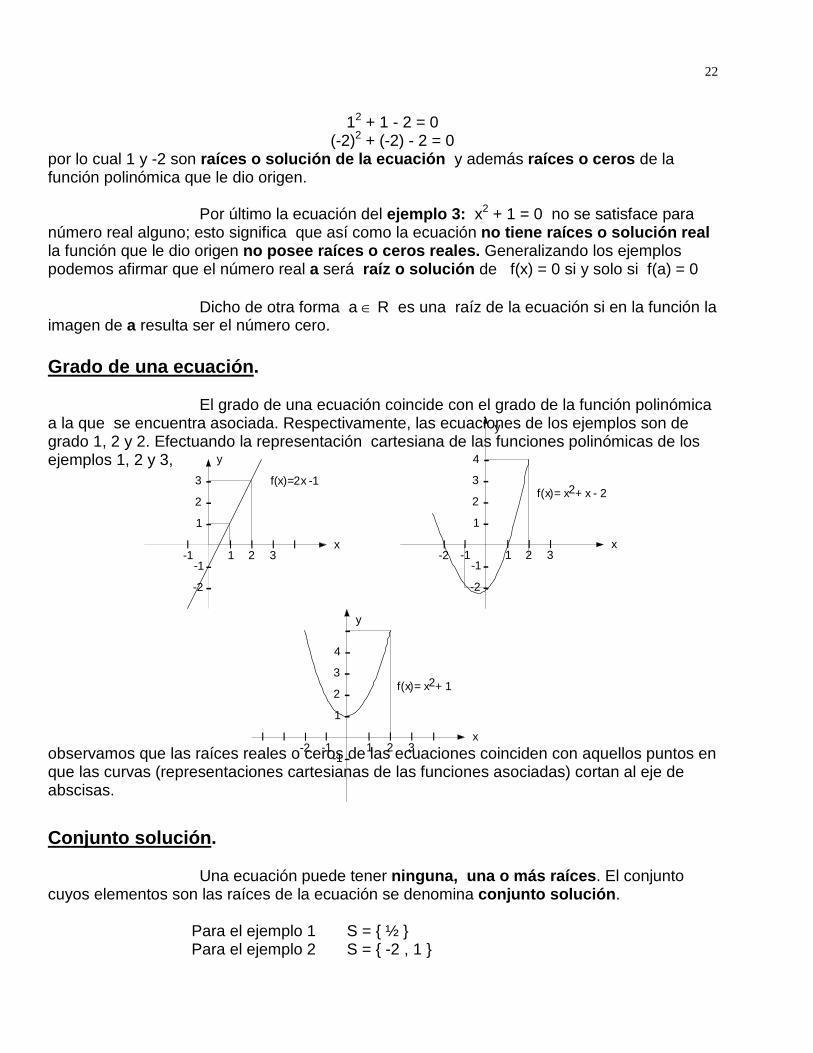
por lo cual 1 y -2 son raíces o solución de la ecuación y además raíces o ceros de la función polinómica que le dio origen.
Por último la ecuación del ejemplo 3: x2 + 1 = 0 no se satisface para número real alguno; esto significa que así como la ecuación no tiene raíces o solución real la función que le dio origen no posee raíces o ceros reales. Generalizando los ejemplos podemos afirmar que el número real a será raíz o solución de f(x) = 0 si y solo si f(a) = 0
Dicho de otra forma a ∈ R es una raíz de la ecuación si en la función la
imagen de a resulta ser el número cero. Grado de una ecuación.
El grado de una ecuación coincide con el grado de la función polinómica
a la que se encuentra asociada. Respectivamente, las ecuaciones de los ejemplos son de grado 1, 2 y 2. Efectuando la representación cartesiana de las funciones polinómicas de los ejemplos 1, 2 y 3, observamos que las raíces reales o ceros de las ecuaciones coinciden con aquellos puntos en que las curvas (representaciones cartesianas de las funciones asociadas) cortan al eje de abscisas. Conjunto solución.
Una ecuación puede tener ninguna, una o más raíces. El conjunto
cuyos elementos son las raíces de la ecuación se denomina conjunto solución. Para el ejemplo 1 S = { ½ } Para el ejemplo 2 S = { -2 , 1 }
II III---
--
f(x)=2x -1
1 2 3-1-1
-2
1
2
3
x
y
III II---
--
f(x)= x2+ x - 2
1 2 3-1-1
-2
1
2
3
x
y
-4
-2
III II---
-
-
f(x)= x2+ 1
1 2 3-1-1
1
2
3
x
y
-4
-2I II
5

23
Para el ejemplo 3 S = { } = φ
Resolver una ecuación es, por lo tanto, encontrar su conjunto solución. Ecuaciones con una sola variable. a) ecuaciones de primer grado.
Una ecuación de primer grado en una incógnita, tal como la que hemos visto en el ejemplo 1 puede expresarse de una manera general como:
a1 x + a0 = 0 con a1 ≠ 0 Un procedimiento sencillo (despejar la incógnita de la ecuación) permite obtener rápidamente la raíz de una ecuación de este tipo, tanto si es racional como si es irracional, es decir, cuando pertenece al conjunto de los números reales. En efecto; volviendo al ejemplo 1
2 x - 1 = 0 2 x = 1
x = ½ es la raíz de la ecuación. b) ecuaciones de segundo grado.
Son las asociadas a los polinomios que tienen el aspecto: P(x) = a2 x2 + a1 x + an con a2 ≠ 0
son del tipo: a2 x2 + a1 x + an = 0 con a2 ≠ 0
y suelen escribirse generalmente:
a x2 + b x + c = 0
Para calcular las raíces de esta ecuación seguiremos el siguiente procedimiento: 1º Pasamos el término independiente c al 2º miembro.
a x2 + b x = -c 2º Sacamos factor común a en el primer miembro 3º Dividimos ambos miembros por a 4º Multiplicamos y dividimos el 2º término del primer miembro por 2
cxabx a 2 −=
+
acx
abx2 −=+
x 2 b2a
x ca
2 + = −

24
5º Sumamos en ambos miembros 6º Observamos que el primer miembro es un trinomio cuadrado perfecto; el que corresponde
al desarrollo de: por lo que escribimos: 7º Obtenemos común denominador en el 2º miembro 8º operando: expresión que debe permitirnos obtener (si existen) las dos raíces de la ecuación de segundo grado.
La existencia de raíces reales en la ecuación de segundo grado puede
analizarse si se observa la cantidad subradical que se denomina DISCRIMINANTE, para el cual pueden presentarse los siguientes casos: a) Si b2 > 4 a c se obtienen x1 ≠ x2 (dos raíces reales y distintas).
b) Si b2 = 4 a c se obtienen x1 = x2 (dos raíces reales e iguales, o sea una raíz doble).
c) Si b2 < 4 a c no existirán raíces reales, ya que la raíz cuadrada de un número negativo no tiene solución en el campo real).
Con el objeto de ilustrar los tres casos que hemos descrito, resolveremos
un ejemplo de cada uno de ellos, efectuando las representaciones gráficas de las funciones polinómicas a que cada una de las ecuaciones está asociada. Ejemplo 1:
x2 - x - 2 = 0
b(2a)
2
2
x 2 ba
x+ b(2a)
ca
b(2a)
22
2
2
2+ = − +
2
2abx
+
2
22
4ab
ac
2abx +−=
+
2
22
4a4acb
2abx −
=
+
x b2a
b 4ac4a
2
2+ = ±−
x b b 4ac2a
2
=− ± −
25
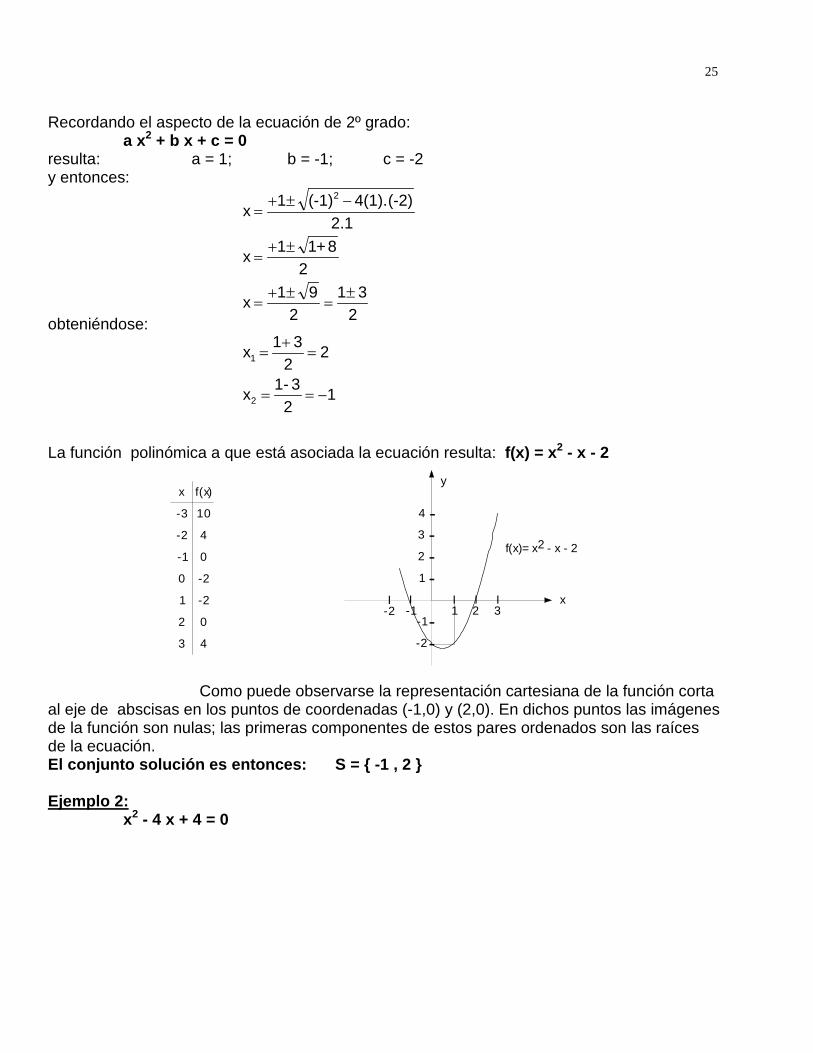
Recordando el aspecto de la ecuación de 2º grado: a x2 + b x + c = 0
resulta: a = 1; b = -1; c = -2 y entonces: obteniéndose: La función polinómica a que está asociada la ecuación resulta: f(x) = x2 - x - 2
Como puede observarse la representación cartesiana de la función corta
al eje de abscisas en los puntos de coordenadas (-1,0) y (2,0). En dichos puntos las imágenes de la función son nulas; las primeras componentes de estos pares ordenados son las raíces de la ecuación. El conjunto solución es entonces: S = { -1 , 2 } Ejemplo 2:
x2 - 4 x + 4 = 0
x 1 (-1) 4(1).(-2)2.1
x 1 1+82
x 1 92
1 32
2
=+ ± −
=+ ±
=+ ±
=±
x 1 32
2
x 1- 32
1
1
2
=+
=
= = −
III II---
--
f(x)= x2 - x - 2
1 2 3-1-1
-2
1
2
3
x
y
-4
-2
x f(x)
-3
-2
-1
0
1
2
3
10
4
0
-2
-2
0
4
26
resultando:
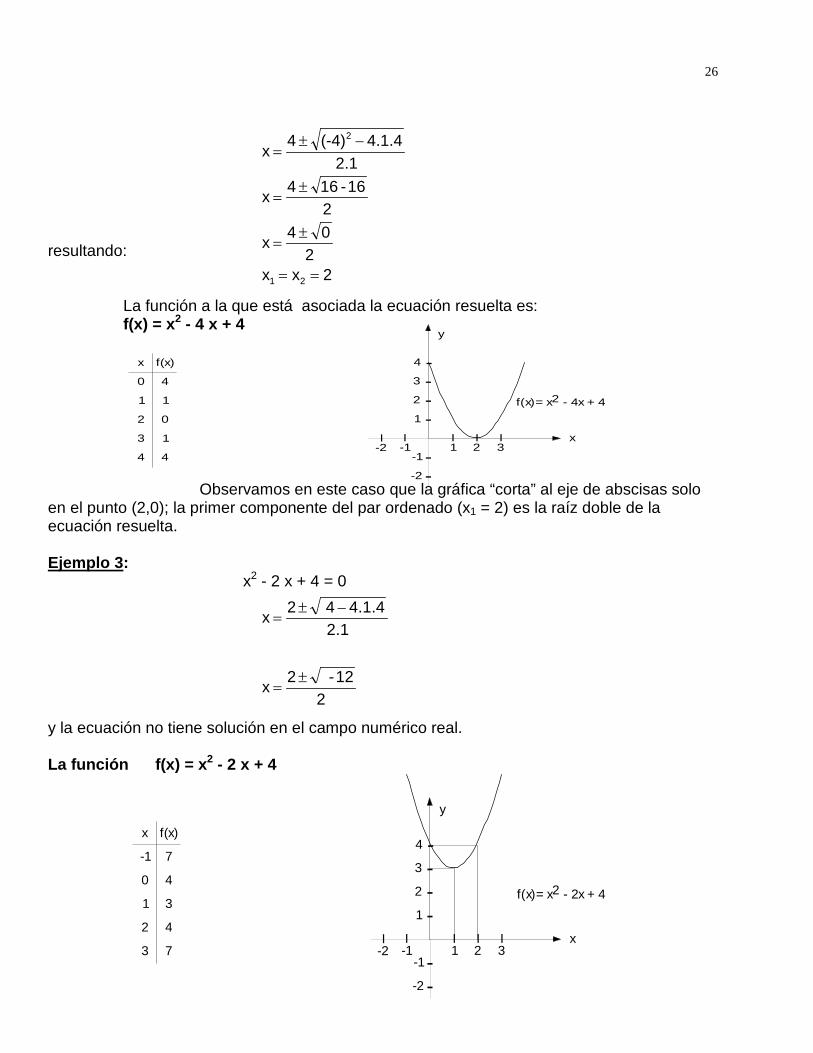
La función a la que está asociada la ecuación resuelta es: f(x) = x2 - 4 x + 4
Observamos en este caso que la gráfica “corta” al eje de abscisas solo en el punto (2,0); la primer componente del par ordenado (x1 = 2) es la raíz doble de la ecuación resuelta. Ejemplo 3: x2 - 2 x + 4 = 0 y la ecuación no tiene solución en el campo numérico real. La función f(x) = x2 - 2 x + 4
x 4 (-4) 4.1.42.1
x 4 16 -162
x 4 02
x x 2
2
1 2
=± −
=±
=±
= =
x 2 4 4.1.42.1
x 2 -122
=± −
=±
III II---
--
f(x)= x2 - 4x + 4
1 2 3-1-1
-2
1
2
3
x
y
-4
-2
x f(x)
0
1
2
3
4
1
0
4
1
4
III II---
--
f(x)= x2 - 2x + 4
1 2 3-1-1
-2
1
2
3
x
y
-4
-2
x f(x)
0
1
2
3
4
3
4
7
-1 7
27
es tal que su gráfica no corta al eje de abscisas, lo que implica la inexistencia de raíces reales. Ecuaciones con dos variables.
Con el mismo concepto desarrollado anteriormente, decimos que si f(x,y)
es una función polinómica en dos variables, f(x,y) = 0 , será una ecuación en dos variables. a) ecuaciones de primer grado en dos variables.
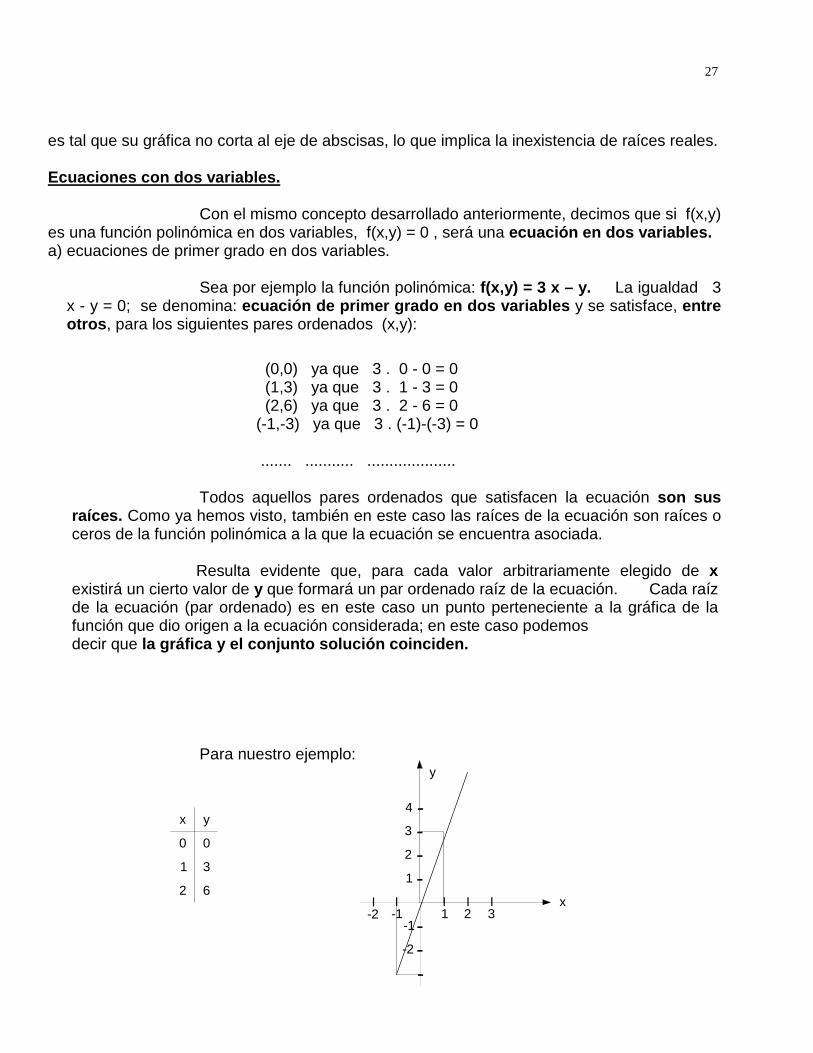
Sea por ejemplo la función polinómica: f(x,y) = 3 x – y. La igualdad 3 x - y = 0; se denomina: ecuación de primer grado en dos variables y se satisface, entre otros, para los siguientes pares ordenados (x,y):
(0,0) ya que 3 . 0 - 0 = 0 (1,3) ya que 3 . 1 - 3 = 0 (2,6) ya que 3 . 2 - 6 = 0 (-1,-3) ya que 3 . (-1)-(-3) = 0 ....... ........... ....................
Todos aquellos pares ordenados que satisfacen la ecuación son sus raíces. Como ya hemos visto, también en este caso las raíces de la ecuación son raíces o ceros de la función polinómica a la que la ecuación se encuentra asociada.
Resulta evidente que, para cada valor arbitrariamente elegido de x
existirá un cierto valor de y que formará un par ordenado raíz de la ecuación. Cada raíz de la ecuación (par ordenado) es en este caso un punto perteneciente a la gráfica de la función que dio origen a la ecuación considerada; en este caso podemos decir que la gráfica y el conjunto solución coinciden.
Para nuestro ejemplo:
III II---
--
1 2 3-1-1
-2
1
2
3
x
y
-4
-2
x y
0
1
2
3
6
0
-

28
b) ecuaciones de segundo grado con dos variables.
Sea la función polinómica de segundo grado en dos variables: f(x,y) = x2 - x - y + 2
que tiene asociada la ecuación: x2 - x - y + 2 = 0
o lo que es igual: y = x2 - x + 2
Esta ecuación (no confundir con el polinomio f(x) = x2 - x + 2) tiene
infinitas raíces: los pares ordenados (x,y) que se obtienen dando valores arbitrarios a x en la misma.
La parábola de la figura anterior es la representación gráfica de la solución de la ecuación:
x2 - x - y + 2 = 0 Sistemas de ecuaciones lineales.
Las ecuaciones 3 x - y = 0 y 2 x - y = 1 de primer grado en dos variables pueden tener una o más raíces comunes y para encontrarlas, conformamos lo que se denomina un sistema de dos ecuaciones lineales con dos incógnitas, que se simboliza:
El conjunto de pares (x,y) que satisface simultáneamente las dos ecuaciones se denomina conjunto solución del sistema. Cuando el conjunto solución es vacío el sistema es incompatible. Si existe única solución (un solo par ordenado) el sistema
=−=−
0y2x0y3x
III II---
1 2 3-1
1
2
3
x
y
-4
-2
x f(x)
0
1
2
-1
-2 8
4
2
2
4
83
II I-3-4 4
----5
6
7
8
29
se dice compatible determinado y si, el conjunto solución está conformado por más de un par ordenado, el sistema se denomina compatible indeterminado.
Generalizando, un sistema de dos ecuaciones lineales con dos
incógnitas puede adoptar el aspecto:
(1) (2)
Las ecuaciones (1) y (2), pueden expresarse en forma conjuntista:
S1 = {(x,y) / A1 x + B1 y + C1 = 0} S2 = {(x,y) / A2 x + B2 y + C2 = 0}
En estas condiciones, resolver el sistema de ecuaciones consiste
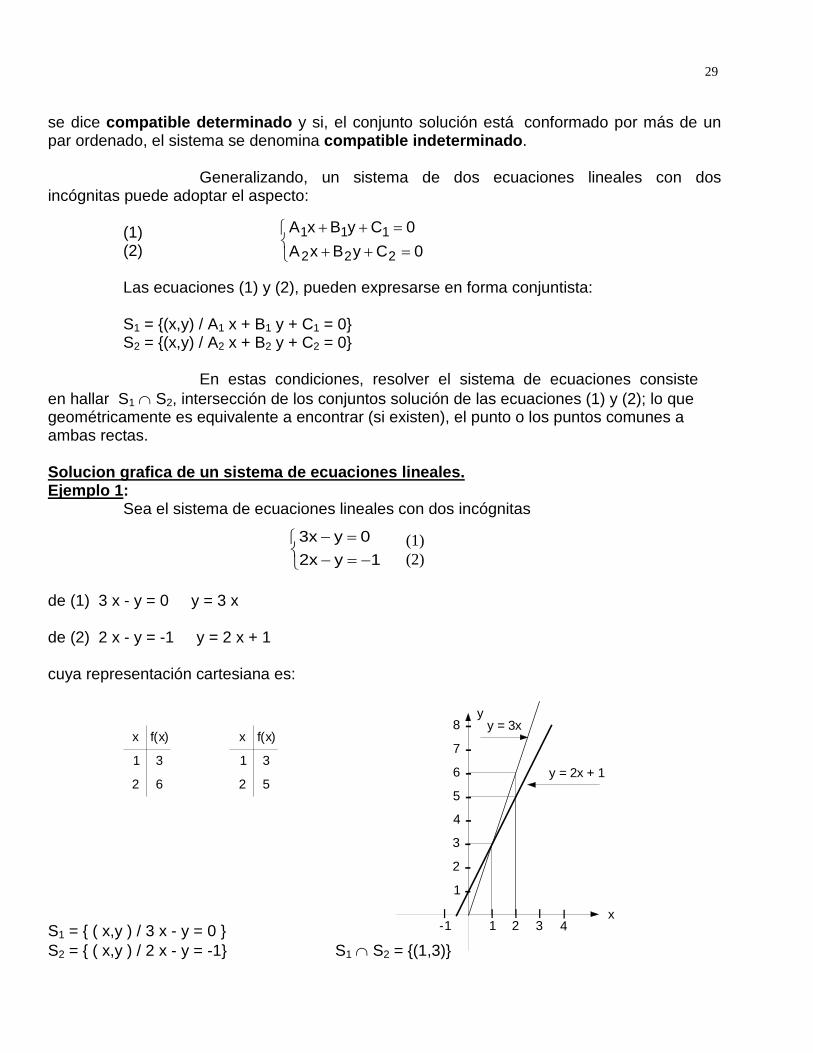
en hallar S1 ∩ S2, intersección de los conjuntos solución de las ecuaciones (1) y (2); lo que geométricamente es equivalente a encontrar (si existen), el punto o los puntos comunes a ambas rectas. Solucion grafica de un sistema de ecuaciones lineales. Ejemplo 1:
Sea el sistema de ecuaciones lineales con dos incógnitas de (1) 3 x - y = 0 y = 3 x de (2) 2 x - y = -1 y = 2 x + 1 cuya representación cartesiana es:
S1 = { ( x,y ) / 3 x - y = 0 } S2 = { ( x,y ) / 2 x - y = -1} S1 ∩ S2 = {(1,3)}
=++=++
0CyBxA0CyBxA
222
111
−=−=−
1y2x0y3x
(1) (2)
II II---
1 2 3-1
1
2
3
x
y
-4
x f(x)
1
2
3
6
I4
----5
6
7
8x f(x)
1
2
3
5y = 2x + 1
y = 3x

30
el conjunto solución del sistema (S1 ∩ S2) tiene un único par ordenado (las rectas se cortan en un punto) y por lo tanto el sistema resulta ser compatible determinado. Ejemplo 2:
Sea el sistema: Si representamos gráficamente las rectas que corresponden a las ecuaciones (1) y (2). observamos que los lugares geométricos coinciden, razón por la cual el conjunto solución del sistema posee infinitos pares ordenados: los que corresponden a todos los puntos de cada una de las rectas; el sistema se dice, compatible indeterminado. Ejemplo 3:
Sea el sistema:
Representadas gráficamente las dos ecuaciones:
0=2y-6x0=y-3x
=−=−
2y3x0y3x
( 1 )
( 2 )
II II---
1 2 3-1
1
2
3
x
y
-4
I4
----5
6
7
8
II II---
1 2 3-1
1
2
3
x
y
-4
I4
----5
6
7
--
y = 3x
y = 3x - 2
-1
-2
(1) (2)
31
resultan rectas paralelas: no existe intersección, lo cual significa que el conjunto solución del sistema es vacío; por esta razón el sistema se dice incompatible. Resolución analítica de un sistema de ecuaciones lineales.
Para la resolución analítica de un sistema de dos ecuaciones lineales pueden utilizarse distintos métodos, algunos de ellos desarrollados en el ciclo secundario,: métodos de sustitución, igualación, sumas y restas, determinantes, razón por la cual solo enunciamos cada uno de ellos, remitiendo al lector para su estudio a los textos de la escuela media o bien al capítulo correspondiente a la recta en el temario de la asignatura Matemática.. Método de Eliminación Gaussiana.
Los métodos enunciados precedentemente resultan de sencilla
aplicación e interpretación cuando el sistema que se trata de resolver tiene un número reducido de variables. Como regla general puede utilizarse con ventaja sobre ellos el llamado método de eliminación Gaussiana o método de eliminación de Gauss; cuyo fundamento y disposición práctica se basa en la demostración ya efectuada para justificar el método de resolución por sumas y restas. En efecto; retornando a las ecuaciones:
(2) b = x a + x a (1) b = x a + x a
2222121
1212111
multiplicando la ecuación (1) por 21a y la ecuación (2) por 11a obtenemos:
(4) b a= x a a + x aa (3) b a= x a a+ x aa
2112112211121
1212122111121
restando (3) de (4)
( a11 a22 - a12 a21 ) x2 = a11b2 - a21 b 1 (5) El sistema
(5) b a - ba = x ) a a - a (a
(1) b = x a + x a
121211221122211
1212111
es equivalente al (1) , (2) ya que, como puede verificarse, tiene el mismo conjunto solución.
Hemos transformado mediante esta operación nuestro sistema original (1) , (2) constituido por dos ecuaciones con dos incógnitas en un nuevo sistema que le es equivalente y en el cual la segunda ecuación (5) posee una sola incógnita, por lo que, obtenida la misma, puede recurrirse a la ecuación (1) para calcular la restante.

32
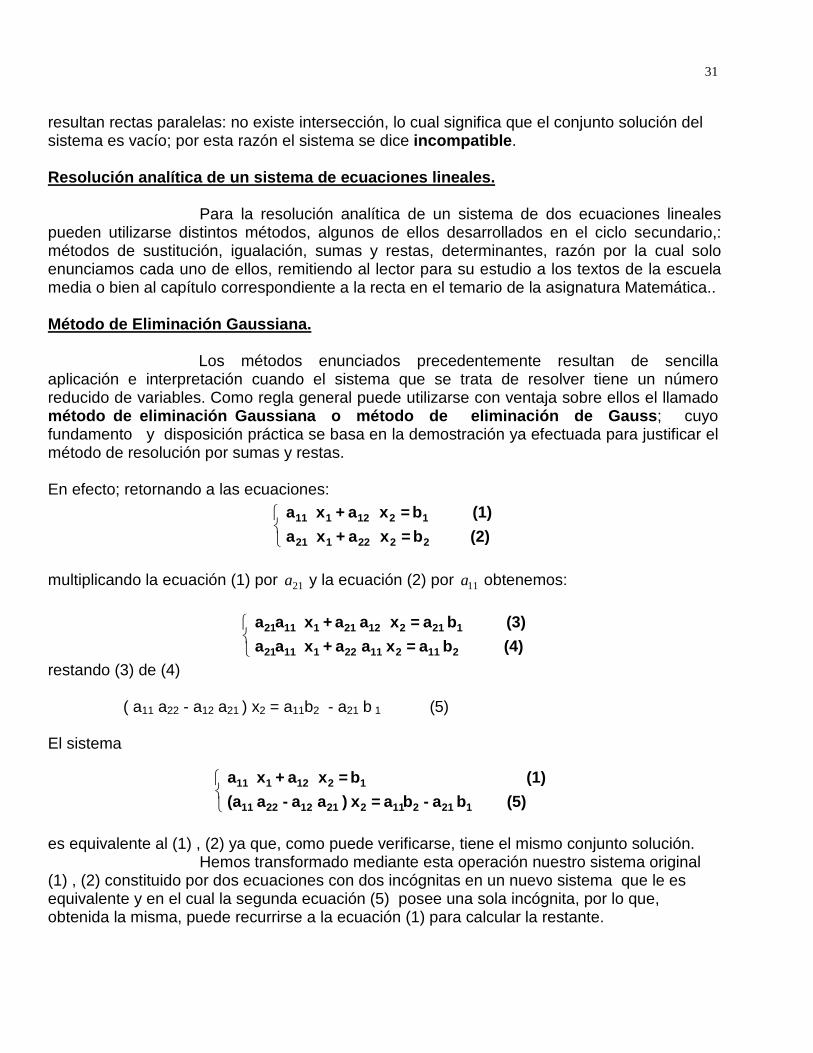
Como en realidad, la operatoria se efectúa sobre los coeficientes, puede realizarse una disposición práctica para el cálculo: 1) a11 a12 b1 (1) 2) a21 a22 b2 (2) 3) a11 a12 b1 (1) 4) a11a22 - a12a21 a11b2 - a21b1 (5)
Se escriben los coeficientes de las ecuaciones (1) y (2) incluso los
términos independientes que se ubican a la derecha de una recta divisoria vertical; se traza una recta horizontal y debajo de ella se escriben los coeficientes del sistema modificado: la fila 3) debe leerse: a11 x1 + a12 x2 = b1 (1) la fila 4) (a11 a22 - a12 a21) x2 = a11 b2 - a21 b1 (5) Ejemplo 1: Sea el sistema:
(2) 1- = y- x 2 (1) 0 = y- x 3
Escribimos: 3 -1 0 (1) 2 -1 -1 (2) 3 -1 0 (1) 0 -1 -3 (5) Desarrollo de (5): el cero que está debajo del coeficiente 3 de la ecuación (1) corresponde a que en la ecuación (5) no existe término en la incógnita x1; debajo del coeficiente -1 de la incógnita x2 de (1) escribimos el transformado del coeficiente de x2 de la (2)
(a11. a22 - a12 . a21) = [ 3 (-1) – 2 (-1) ] = -1 y debajo del término independiente de (1) el transformado del término independiente de (2):
a11 . b2 - b1 . a21 = [ 3 (-1) - 0 . 2 ] = - 3
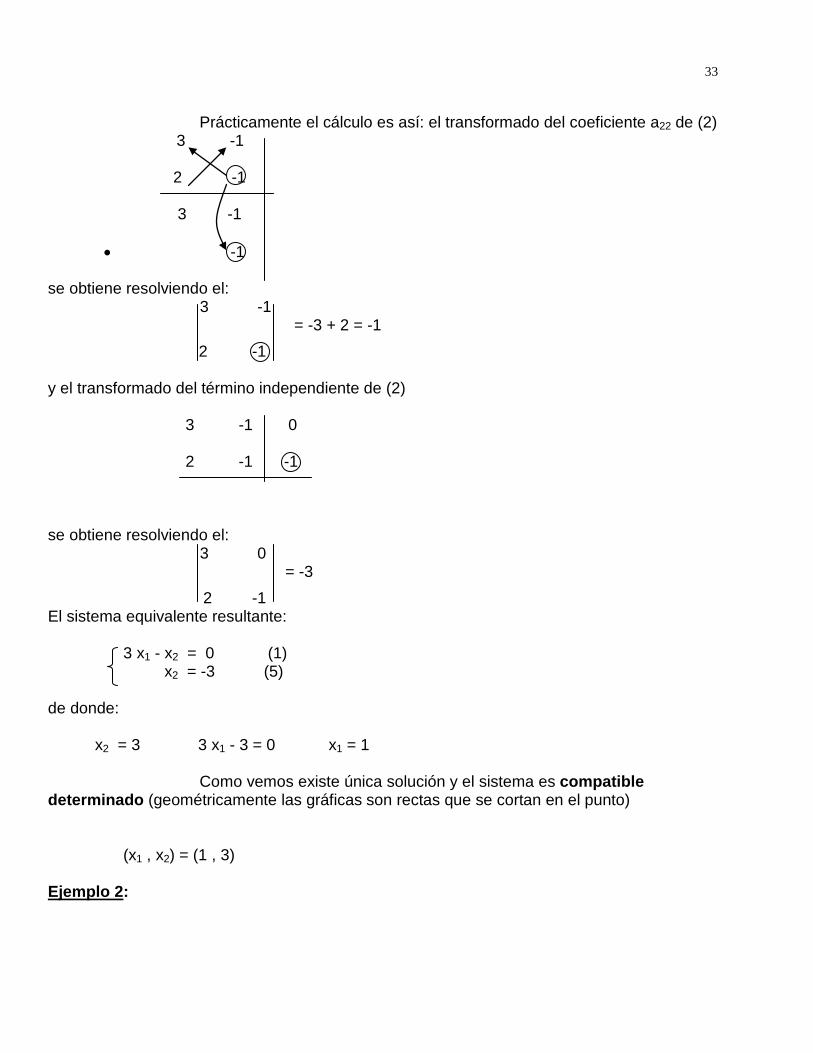
33
Prácticamente el cálculo es así: el transformado del coeficiente a22 de (2) 3 -1
2 -1
3 -1 • -1
se obtiene resolviendo el:
3 -1 = -3 + 2 = -1
2 -1 y el transformado del término independiente de (2) 3 -1 0 2 -1 -1 se obtiene resolviendo el:
3 0 = -3
2 -1 El sistema equivalente resultante:
3 x1 - x2 = 0 (1) x2 = -3 (5)
de donde:
x2 = 3 3 x1 - 3 = 0 x1 = 1
Como vemos existe única solución y el sistema es compatible
determinado (geométricamente las gráficas son rectas que se cortan en el punto)
(x1 , x2) = (1 , 3) Ejemplo 2:

34
Sea el sistema: 3 x - y = 2 6 x - 2y = 4
3 -1 2 6 -2 4 3 -1 2 0 0 0 El sistema equivalente es:
3 x1 - x2 = 2 0.x2 = 0
La ecuación 0.x2 = 0 se satisface para cualquier número razón por la cual
el sistema tiene infinitas soluciones y se denomina compatible indeterminado. Cada una las posibles soluciones se obtiene fijando un valor arbitrario para x2 y obteniendo luego x1 de la otra ecuación. (Geométricamente las gráficas coinciden). Ejemplo 3:
Sea el sistema: 3 x1 - x2 = 2 3 x1 - x2 = 4
3 -1 2
3 -1 4
3 -1 2 0 6 Siendo el sistema equivalente:
3 x1 - x2 = 2 0.x2 = 6
La segunda ecuación de este sistema no tiene solución, ya que no existe
número que multiplicado por cero de como resultado seis; el sistema es incompatible (en este caso las rectas son paralelas).

35
Como hemos visto en los ejemplos anteriores el método de eliminación
Gaussiana no solo permite resolver con rapidez un sistema de ecuaciones sino además permite obtener el tipo de solución para cada caso particular. Resolución de un sistema de tres ecuaciones lineales con tres incógnitas.
Idéntico razonamiento al desarrollado para el método de eliminación Gaussiana en dos variables se utiliza para resolver un sistema de tres ecuaciones lineales con tres incógnitas: Sea el sistema :
a11 x1 + a12 x2 + a13 x3 = b1 (1) a21 x1 + a22 x2 + a23 x3 = b2 (2) a31 x1 + a32 x2 + a33 x3 = b3 (3)
En este caso el método consiste en tomar cualquiera de las ecuaciones (por ejemplo la (1)) y
eliminar la incógnita x1 primero con la ecuación (2) y luego, independientemente, con la ecuación (3) transformando el sistema original en uno equivalente con una ecuación en tres
incógnitas y las otras con dos incógnitas. De este nuevo sistema se toman las ecuaciones que tienen dos
incógnitas y se lo transforma siguiendo el procedimiento ya descripto en otro sistema equivalente, con una ecuación en dos incógnitas y la otra solo en una.
Del resultado de esta última operación obtendremos un sistema
equivalente al original, con la primera ecuación en tres incógnitas, la segunda en dos y la tercera en solo una, lo que nos permite obtener el conjunto solución. Ejemplo 1:
Sea el sistema 2 x1 - x2 + x3 = 5 x1 + x2 - 2 x3 = -3 3 x1 + 2 x2 - x3 = 8

36
Adoptando la disposición práctica descripta: 2 -1 1 5 1 1 -2 -3 3 2 -1 8 repetimos la 1º ec. 2 -1 1 5 0 3 -5 -11 0 7 -5 1 repetimos la 1º 2 -1 1 5 y la 2º ec. del paso 0 3 -5 -11 anterior. 0 0 20 80 El sistema equivalente
2 x1 - x2 + x3 = 5 3 x2 - 5 x3 = -11 20 x3 = 80 se obtuvo resolviendo, por ejemplo, para el elemento -5 que es el transformado de -1 el determinante:
2 1 = -2 -3 = -5
3 -1 De: 20 x3 = 80 x3 = 4 De: 3 x2 - 5 . 4 = -11 3 x2 = 20 - 11 x2 = 3 y por último de: 2 x1 - 3 + 4 = 5 2 x1 = 5 + 3 - 4 Ejemplo 2:
3 x1 - 5 x2 + 11 x3 = 7 2 x1 + 3 x2 + 8 x3 = 4
x1 - x2 + 9 x3 = -3
x1 = 2
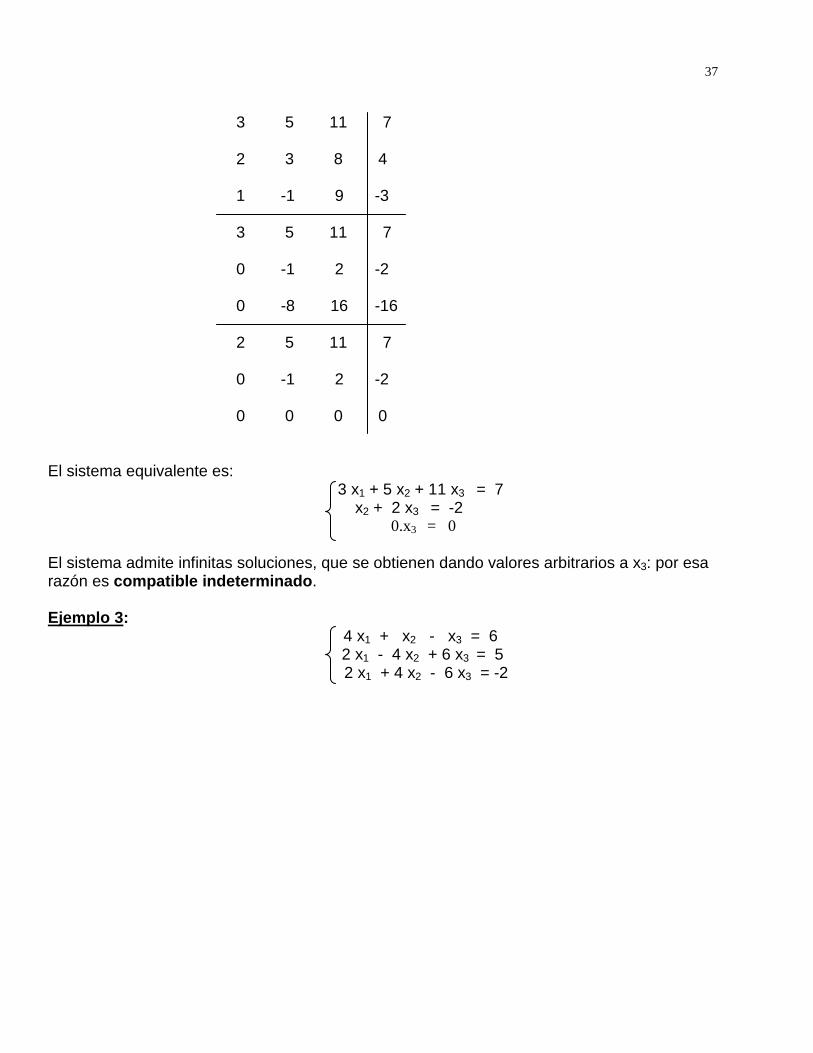
37
3 5 11 7
2 3 8 4
1 -1 9 -3
3 5 11 7
0 -1 2 -2
0 -8 16 -16
2 5 11 7
0 -1 2 -2
0 0 0 0 El sistema equivalente es:
3 x1 + 5 x2 + 11 x3 = 7 x2 + 2 x3 = -2
0.x3 = 0 El sistema admite infinitas soluciones, que se obtienen dando valores arbitrarios a x3: por esa razón es compatible indeterminado. Ejemplo 3:
4 x1 + x2 - x3 = 6 2 x1 - 4 x2 + 6 x3 = 5
2 x1 + 4 x2 - 6 x3 = -2

38
4 1 -1 6 2 -4 6 5
2 4 -6 -2
4 1 -1 6
0 -14 22 32
0 14 -22 -20
4 1 -1 6
0 -14 22 32
0 0 0 -168
El sistema equivalente es:
4 x1 + 1 x2 - 1 x3 = 6 14 x2 + 22 x3 = 32
0 x3 = -168 El sistema no tiene solución (no la tiene 0 . x3 = -168) y por lo tanto se denomina incompatible. Resolución de sistemas de ecuaciones lineales por inversión de matrices.
Sea el sistema de tres ecuaciones lineales con tres incógnitas:
a11 x1 + a12 x2 + a13 x3 = b1 (1) a21 x1 + a22 x2 + a23 x3 = b2 (2) a31 x1 + a32 x2 + a33 x3 = b3 (3)
podemos escribirlo en forma matricial si hacemos el producto:
=
++++++
=
⋅
3
2
1
333232131
323222121
313212111
3
2
1
333231
232221
131211
bbb
xaxaxaxaxaxaxaxaxa
xxx
aaaaaaaaa
del cual resulta la igualdad:
=
⋅
3
2
1
3
2
1
333231
232221
131211
bbb
xxx
aaaaaaaaa
designando:

39
=
333231
232221
131211
aaaaaaaaa
A ;
=
3
2
1
xxx
X ;
=
3
2
1
bbb
B
simbolizamos: BXA =⋅
Siendo A y B matrices conocidas, resolver el sistema consiste en encontrar los elementos de la matriz X, lo que se consigue premultiplicando (multiplicando desde la izquierda) ambos miembros de la igualdad por la matriz inversa de A, que simbolizamos como la matriz A-1. En efecto, de:
BAXAA ⋅=⋅⋅ −− 11 teniendo en cuenta de acuerdo con la definición de matriz inversa que IAA =⋅−1 y que I es el elemento neutro en el producto de matrices, resulta:
BAX ⋅= −1 lo que significa que, para obtener la matriz de las incógnitas (matriz solución) basta con premultiplicar la matriz de los términos independientes por la matriz inversa de la matriz de los coeficientes de las incógnitas.
Si recordamos que A
AdjAt
=−1 , sólo podremos resolver por inversión de matrices aquellos
sistemas en los cuales el determinante asociado a la matriz de los coeficientes de las incógnitas sea distinto de cero, es decir solamente los sistemas que sean compatibles determinados. Ejemplo: Hallar la solución del sistema de ecuaciones lineales:
−=++=−+=+−
1233222
zyxzyxzyx
en forma matricial el sistema se escribe:
−=
⋅
−
−
132
213121
112
zyx
como sabemos, pueden efectuarse operaciones elementales sobre el sistema de ecuaciones o sobre la matriz ampliada (ver método de eliminación gaussiana) o bien, si existe, calcular la inversa de

40
−
−=
213121
112A y luego, premultiplicar la matriz de los términos independientes por
10555315135
213121
112555315135
1
−−−
−
=
−−
−−−
−
==−
AAdjA
t; o sea:
−−=
−−=
−⋅
−−−
−
31
2
3010
20
101
132
555315135
101 ;o sea; x = 2; y = -1; z = -
Teorema de Cramer.
Como hemos visto al resolver sistemas de ecuaciones lineales por el método matricial, la matriz de las incógnitas se obtiene mediante la expresión: BAX ⋅= −1 , la
que teniendo en cuenta A
AdjAt
=−1 puede escribirse: BA
AdjXt⋅= que se puede desarrollar
para un sistema de tres ecuaciones con tres incógnitas, sin que la demostración pierda validez general de la siguiente manera:
⋅
=
3
2
1
333231
232221
131211
332313
322212
312111
3
2
1
bbb
aaaaaaaaaAAAAAAAAA
xxx
expresión de la cual se obtienen la siguiente igualdad:
333231
232221
131211
33323
23222
13121
333231
232221
131211
3312211111
aaaaaaaaaaabaabaab
aaaaaaaaa
bAbAbAx =
⋅+⋅+⋅=
41
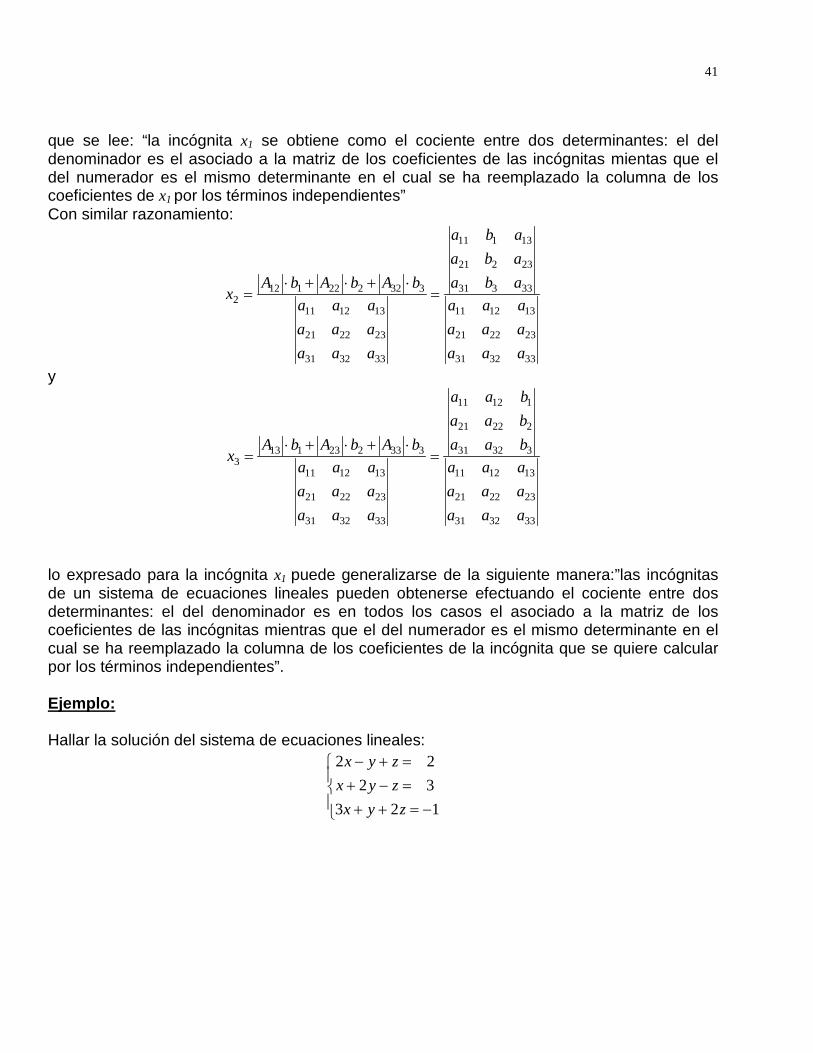
que se lee: “la incógnita x1 se obtiene como el cociente entre dos determinantes: el del denominador es el asociado a la matriz de los coeficientes de las incógnitas mientas que el del numerador es el mismo determinante en el cual se ha reemplazado la columna de los coeficientes de x1 por los términos independientes” Con similar razonamiento:
333231
232221
131211
33331
23221
13111
333231
232221
131211
3322221122
aaaaaaaaaabaabaaba
aaaaaaaaa
bAbAbAx =
⋅+⋅+⋅=
y
333231
232221
131211
33231
22221
11211
333231
232221
131211
3332231133
aaaaaaaaabaabaabaa
aaaaaaaaa
bAbAbAx =
⋅+⋅+⋅=
lo expresado para la incógnita x1 puede generalizarse de la siguiente manera:”las incógnitas de un sistema de ecuaciones lineales pueden obtenerse efectuando el cociente entre dos determinantes: el del denominador es en todos los casos el asociado a la matriz de los coeficientes de las incógnitas mientras que el del numerador es el mismo determinante en el cual se ha reemplazado la columna de los coeficientes de la incógnita que se quiere calcular por los términos independientes”. Ejemplo: Hallar la solución del sistema de ecuaciones lineales:
−=++=−+=+−
1233222
zyxzyxzyx

42
310
113321212
;110
213131
122
;2
213121
112211123
112
−=−
−
=−=−
−
==
−−
−−
−
= zyx
Sistemas homogéneos.
Reciben este nombre los sistemas de ecuaciones lineales que tienen
todos los términos independientes nulos. Tienen el aspecto:
a11 x1 + a12 x2 + a13 x3 = 0 (1) a21 x1 + a22 x2 + a23 x3 = 0 (2) a31 x1 + a32 x2 + a33 x3 = 0 (3)
Hemos utilizado estos sistemas en el estudio de la dependencia e
independencia lineal al tratar los Espacios Vectoriales. Vimos entonces y, lo recordamos ahora que estos sistemas siempre tienen solución (la llamada trivial con todos los valores de las incógnitas iguales a cero)
Como ejemplos podemos citar para el espacio dos la intersección entre dos rectas que pasan por el origen de coordenadas y para el espacio tridimensional, la intersección de tres planos que pasan por el origen de coordenadas.
Se resuelven por cualquier método de los desarrollados; muchas veces sólo se necesita saber si el sistema es compatible determinado o compatible indeterminado, lo que se logra resolviendo el determinante asociado a la matriz de los coeficientes de las incógnitas. Si dicho determinante es distinto de cero, las tres ecuaciones son independientes y la solución es única (la trivial): si por el contrario el determinante resulta nulo, el sistema resulta compatible indeterminado (soluciones múltiples)
Resolución Matricial de los sistemas de ecuaciones lineales incompatibles. (aplicación del concepto de Matriz Pseudoinversa).
Sea el sistema de ecuaciones independientes (por lo tanto incompatible)
=+=+=+
)3()2(
)1(
32313
22212
12111
qxbxaqxbxa
qxbxa
que puede escribirse en notación matricial:

43
=
⋅
3
2
1
2
1
33
22
11
qqq
xx
bababa
(4)
o simbólicamente qxA =⋅
Como la matriz A tiene mayor número de filas que de columnas sólo resulta posible definir su matriz inversa (en este caso, pseudoinversa) por la izquierda.
Para despejar la matriz x se premultiplican ambos miembros de la
igualdad anterior por la matriz traspuesta de A : qAxAA tt ⋅=⋅⋅ (5)
Nota: “para el caso que nos ocupa ( ) ( ) ( )222332 xxx
t MAA =⋅ ”
“si hubiéramos hecho ( ) ( ) ( )333223 xxt
x MAA =⋅ resulta siempre singular (no admite matriz inversa)” Como la matriz AAt ⋅ es cuadrada, si su determinante asociado es
distinto de cero, admite matriz inversa ( ) 1−⋅ AAt ; premultiplicando por esta matriz ambos
miembros de (5): ( ) ( ) ( ) qAAAxAAAA tttt ⋅⋅⋅=⋅⋅⋅⋅
−− 11 (6)
siendo ( ) ( ) IAAAA tt =⋅⋅⋅−1
resulta:
( ) qAAAx tt ⋅⋅⋅=−1
expresión en la cual ( ) LAAA tt =⋅⋅
−1 (matriz pseudoinversa por la izquierda)
Ejemplo:
Sea el sistema de ecuaciones lineales:
=+
=−
=+
21
231
21
21
21
xx
xx
xx
por el aspecto de la primera y última ecuaciones con primeros miembros iguales y segundos miembros distintos, el sistema es incompatible. Actividad: Analizar la compatibilidad mediante el cálculo de los rangos de las matrices
−=
111111
A y
−=′
2111
2311111
A
44
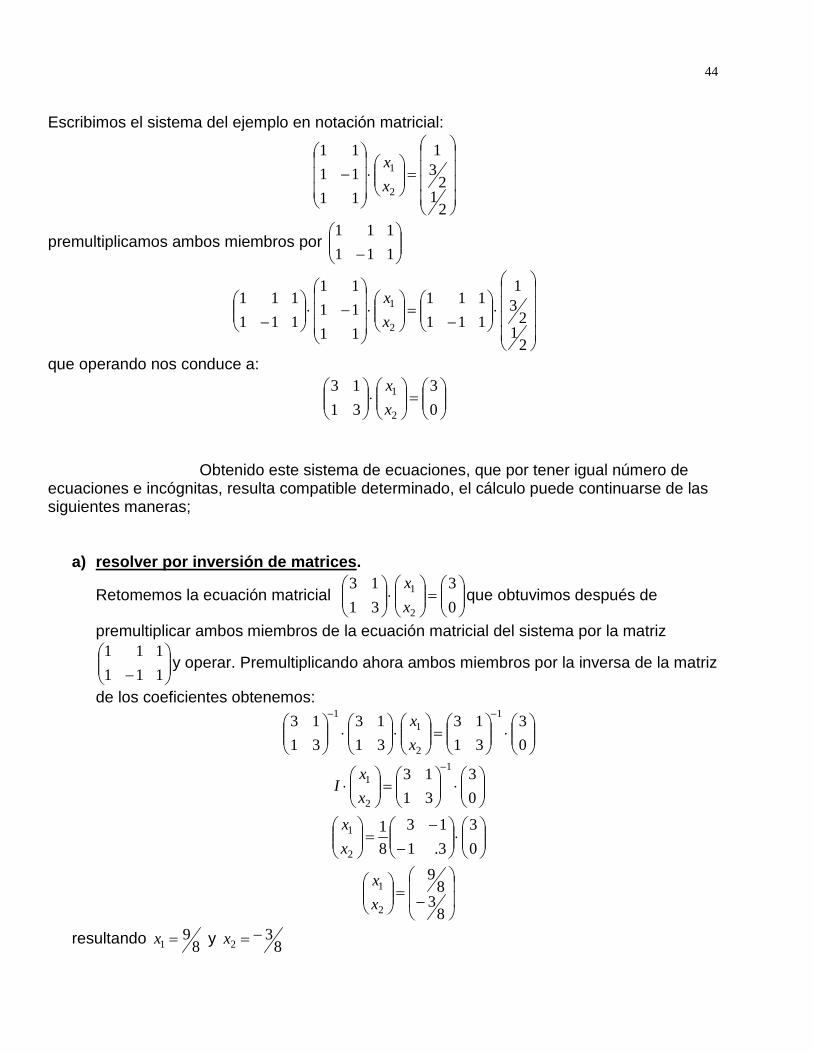
Escribimos el sistema del ejemplo en notación matricial:
=
⋅
−
21
231
111111
2
1
xx
premultiplicamos ambos miembros por
− 111
111
⋅
−
=
⋅
−⋅
−
21
231
111111
111111
111111
2
1
xx
que operando nos conduce a:
=
⋅
03
3113
2
1
xx
Obtenido este sistema de ecuaciones, que por tener igual número de
ecuaciones e incógnitas, resulta compatible determinado, el cálculo puede continuarse de las siguientes maneras;
a) resolver por inversión de matrices.
Retomemos la ecuación matricial
=
⋅
03
3113
2
1
xx
que obtuvimos después de
premultiplicar ambos miembros de la ecuación matricial del sistema por la matriz
− 111
111y operar. Premultiplicando ahora ambos miembros por la inversa de la matriz
de los coeficientes obtenemos:
⋅
=
⋅
⋅
−−
03
3113
3113
3113 1
2
11
xx
⋅
=
⋅
−
03
3113 1
2
1
xx
I
⋅
−
−=
03
3.113
81
2
1
xx
−=
83
89
2
1
xx
resultando 89
1 =x y 83
2−=x

45
b) resolver por eliminación Gaussiana o por la Regla de Cramer. (realizar la actividad)
Forma práctica del cálculo. Consiste en premultiplicar la matriz ampliada del sistema original
incompatible por su matriz traspuesta. Si a la matriz resultante del producto le eliminamos la última fila, resulta la matriz ampliada del sistema de ecuaciones normales, que puede resolverse por los métodos expuestos precedentemente.
Consideremos la matriz ampliada que corresponde a un sistema de
ecuaciones lineales incompatible de cuatro ecuaciones con tres incógnitas:
=
4444
3333
2222
1111
´
qcbaqcbaqcbaqcba
A
vamos a premultiplicar (multiplicar desde la izquierda) por su matriz traspuesta:
4321
4321
4321
4321
qqqqccccbbbbaaaa
⋅
4444
3333
2222
1111
qcbaqcbaqcbaqcba
=
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
qqqcqbqacqcccbcabqbcbbbaaqacabaa
eliminando la última fila de la matriz producto obtenemos:
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
cqcccbcabqbcbbbaaqacabaa
Para el ejemplo que venimos desarrollando, la matriz ampliada es:
−
2111
2311
111; premultiplicando por su matriz traspuesta:

46
⋅
−
21
231
111111
−
2111
2311
111=
41402
031313
eliminando la última fila de la matriz producto obtenida llegamos a:
031313
esta matriz, es la matriz ampliada del sistema de ecuaciones compatible; solo resta encontrar la solución por cualquiera de los métodos desarrollados.