
VARIADORES DE FRECUENCIA PARA EL CONTROL DE VELOCIDAD DE ...€¦ · modalidad Proyecto de...
69
UNIVERSIDAD CENTRAL DEL ECUADOR FACULTAD DE FILOSOFÍA, LETRAS Y CIENCIAS DE LA EDUCACIÓN TECNOLOGÍA ELECTROMECÁNICA “VARIADORES DE FRECUENCIA PARA EL CONTROL DE VELOCIDAD DE MOTORES ASINCRÓNICOS JAULA DE ARDILLA”. Trabajo de Investigación previo a la obtención del Título de Tecnólogo Superior en Electromecánica AUTOR: Leonardo Xavier Arana Suarez CC. 172196161-1 TUTOR: MSc. Edison Eduardo Morales Andino CC. 1707265565 Quito D.M., 03 de agosto del 2017
Transcript of VARIADORES DE FRECUENCIA PARA EL CONTROL DE VELOCIDAD DE ...€¦ · modalidad Proyecto de...

UNIVERSIDAD CENTRAL DEL ECUADOR
FACULTAD DE FILOSOFÍA, LETRAS Y CIENCIAS DE LA EDUCACIÓN
TECNOLOGÍA ELECTROMECÁNICA
“VARIADORES DE FRECUENCIA PARA EL CONTROL DE
VELOCIDAD DE MOTORES ASINCRÓNICOS JAULA DE
ARDILLA”.
Trabajo de Investigación previo a la obtención del Título de Tecnólogo
Superior en Electromecánica
AUTOR: Leonardo Xavier Arana Suarez
CC. 172196161-1
TUTOR: MSc. Edison Eduardo Morales Andino
CC. 1707265565
Quito D.M., 03 de agosto del 2017

ii
AUTORIZACIÓN DE LA AUTORÍA INTELECTUAL
Yo, LEONARDO XAVIER ARANA SUAREZ, en calidad de autor de trabajo de investigación
realizada sobre “VARIADORES DE FRECUENCIA PARA EL CONTROL DE VELOCIDAD DE
MOTORES ASINCRÓNICOS JAULA DE ARDILLA”, por la presente autorizo a la
UNIVERSIDAD CENTRAL DEL ECUADOR, hacer uso de todos los contenidos que me pertenecen
o de parte de los que contienen esta obra, con fines estrictamente académicos o de investigación.
Los derechos que como autor me corresponden, con excepción de la presente autorización, seguirán
vigentes a mi favor, de conformidad con lo establecido en los artículos 5, 6, 8; 19 y demás pertinentes
de la Ley de Propiedad Intelectual y su Reglamento.
Tambien, autorizo a la Universidad Central del Ecuador realizar la digitalizacion y publicación de
este trabajo de investigación en el repositorio virtual, de conformidad a lo dispuesto en el Art. 144 de
la Ley Organica de Educación Superior.
LEONARDO XAVIER ARANA SUAREZ
C.C. 172196161-1
E-mail: [email protected]

iii
CONSTANCIA DE APROBACIÓN DEL TUTOR
Yo, EDISON EDUARDO MORALES ANDINO, en calidad de tutor de trabajo de titulación,
modalidad Proyecto de Investigación, elaborado por LEONARDO XAVIER ARANA SUAREZ; cuyo
titulo es: “VARIADORES DE FRECUENCIA PARA EL CONTROL DE VELOCIDAD DE
MOTORES ASINCRÓNICOS JAULA DE ARDILLA”, previo la obtección de Grado de Tecnólogo
Superior en Electromecánica, considero que el mismo reune los requisitos y meritos necesarios en el
campo metodologico y epistemologico, para ser sometido a la evaluacion por parte del tribunal
examinador que se designe, por lo que lo APRUEBO, a fin de que el trabajo se habilitado para
continuar con el proceso de titulación determinado por la Universidad Central del Ecuador.
En la ciudad de Quito 01 de Diciembre del 2016
FIRMA DEL TUTOR
MSC. EDISON MORALES
C.C. 1707265565

iv
DEDICATORIA
Este trabajo de investigaciòn está dedicado a
Dios, a mis padres y hermanos. A Dios porque ha
estado conmigo a todo momento dándome
fortaleza para continuar y no desmayar en los
problemas que se presentaban, enseñándome a
encarar la adversidades sin perder nunca la
dignidad ni desfallecer en el intento, a mis padres,
quienes a lo largo de mi vida han velado por mi
bienestar y educación siendo mi apoyo en todo
momento. Depositando su íntegra confianza en
cada reto que se me presentaba sin dudar ni un
solo momento en mi talento y capacidad. Es por
ello que soy lo que soy ahora. Los amo con toda
mi vida.
LEONARDO

v
AGRADECIMIENTO
El presente trabajo de investigaciòn me gustaría
agradecer a dios y a las personas más importante de
mi vida mis padres y hermanos, por sus consejos y
bendiciones hacia mí, para llegar hasta donde he
llegado, porque me inspiro la responsabilidad y a
no rendirse jamás.
A mi director de tesis, Msc. Edison Morales por su
esfuerzo, paciencia y dedicación, y a las personas q
han formado parte de mi vida profesional a las q me
encantaría agradecerles su amistad, consejos,
apoyo, animo, y compañía en los momentos más
difíciles de mi vida.
LEONARDO.

vi
ÌNDICE
PÁG.
AUTORIZACIÓN DE LA AUTORÍA INTELECTUAL ..................................................................... ii
CONSTANCIA DE APROBACIÓN DEL TUTOR ............................................................................ iii
DEDICATORIA .................................................................................................................................... iv
AGRADECIMIENTO ............................................................................................................................ v
ÌNDICE .................................................................................................................................................. vi
ÌNDICE DE TABLAS ....................................................................................................................... ix
ÍNDICE DE FIGURAS ........................................................................................................................... x
ÍNDICE DE ANEXOS .......................................................................................................................... xi
RESUMEN ........................................................................................................................................... xii
ABSTRACT ......................................................................................................................................... xiii
INTRODUCCIÓN .................................................................................................................................. 1
CAPÍTULO I .......................................................................................................................................... 2
DELIMITACIÓN DEL TEMA .............................................................................................................. 2
OBJETIVOS ........................................................................................................................................... 3
OBJETIVO GENERAL .......................................................................................................................... 3
OBJETIVOS ESPECÍFICOS .................................................................................................................. 3
JUSTIFICACIÓN ................................................................................................................................... 3
DISEÑO DE LA INVESTIGACIÓN ..................................................................................................... 4
TÉCNICAS E INSTRUMENTOS DE RECOLECCIÓN DE DATOS .................................................. 4
IDENTIFICACIÓN DE LAS FUENTES DE INFORMACIÓN ............................................................ 5
CAPÍTULO II ......................................................................................................................................... 6
MARCO TEÓRICO ................................................................................................................................ 6
INTRODUCCIÓN .................................................................................................................................. 6
CONSIDERACIONES GENERALES DE LAS MÁQUINAS ASINCRÓNICAS ............................... 7
LOS MOTORES ASÍNCRONICOS CONSTAN DE DOS PARTES FUNDAMENTALES................ 7
EL ESTATOR. ........................................................................................................................................ 8
vii
EL ROTOR. ............................................................................................................................................ 8
PLACA DE CARACTERÍSTICAS DE UN MOTOR TRIFÁSICO ...................................................... 8
CARACTERÍSTICAS DE PLACA ........................................................................................................ 9
DIFERENTES SISTEMAS DE ARRANQUE DE LOS MOTORES ASÍNCRONOS ......................... 9
ARRANQUE DE MOTORES ASINCRÓNICOS CON ROTOR EN JAULA:..................................... 9
ARRANQUE DIRECTO ...................................................................................................................... 10
ARRANQUE A TENSIÓN REDUCIDA DE MOTORES ASINCRÓNICOS CON ROTOR EN
JAULA DE ARDILLA. ........................................................................................................................ 11
ARRANQUE POR AUTOTRANSFORMADOR ................................................................................ 11
CONMUTACIÓN ESTRELLA-DELTA ............................................................................................. 12
ARRANQUE DE MOTORES ASINCRÓNICOS CON ROTOR EN JAULA POR DISPOSITIVOS
ELECTRÓNICOS................................................................................................................................. 14
ARRANQUE DE LOS MOTORES ASINCRÓNICOS CON ROTOR BOBINADO ......................... 15
DIFERENTES MÉTODOS DE REGULACIÓN DE VELOCIDAD DE LOS MOTORES
ASINCRÓNICOS ................................................................................................................................. 16
REGULACIÓN POR VARIACIÓN DE NÚMERO DE POLOS ........................................................ 16
VARIADOR DE FRECUENCIA O VELOCIDAD ............................................................................. 17
VENTAJAS DE LA UTILIZACIÓN DEL VARIADOR DE VELOCIDAD ...................................... 17
INCONVENIENTES DE LA UTILIZACIÓN DEL VARIADOR DE VELOCIDAD ....................... 18
TIPOS DE VARIADORES DE VELOCIDAD .................................................................................... 18
VARIADORES ELÉCTRICO-ELECTRÓNICOS ............................................................................... 18
VARIADORES PARA MOTORES DE DC ........................................................................................ 18
VARIADORES POR CORRIENTES DE EDDY ................................................................................ 19
VARIADORES DE DESLIZAMIENTO ............................................................................................. 19
MÓDULO CANOPEN ......................................................................................................................... 20
PARÁMETROS .................................................................................................................................... 23
FORMAS DE EVITAR INTERFERENCIAS ELECTROMAGNÉTICAS (EMI) .............................. 25
ACCESORIOS ...................................................................................................................................... 28
PANALES FRONTALES DE OPERACIONES .................................................................................. 34
PANEL SDP ......................................................................................................................................... 38
EL VARIADOR.................................................................................................................................... 42

viii
PANEL BOP (BASIC OPERATOR PANEL) ...................................................................................... 47
DESCRIPCIÓN DE TÉRMINOS BÁSICOS ....................................................................................... 48
PWM.- MODULACIÓN DE ANCHO DE PULSOS. ......................................................................... 48
CAPÍTULO III ...................................................................................................................................... 49
CONCLUSIONES Y RECOMENDACIONES .................................................................................... 49
CONCLUSIONES ................................................................................................................................ 49
RECOMENDACIONES ....................................................................................................................... 49
ix
ÌNDICE DE TABLAS
Pag.
TABLA 1 INFORMACIÓN TÉCNICA ................................................................................................ 31
TABLA 2 TIPOS DE DATOS............................................................................................................... 40
TABLA 3 PARÁMETROS DEL VARIADOR PUESTA A PUNTO ................................................ 42
TABLA 4 ESTADO DEL VARIADOR INDICADOR POR LOS LEDS DEL PANEL ................... 44
x
ÍNDICE DE FIGURAS
Pág.
FIGURA 1 PARTES DE UN MOTOR ELÉTRICO .............................................................................. 7
FIGURA 2 ARRANQUE DIRECTO ................................................................................................... 10
FIGURA 3 ESQUEMA ELÉCTRICO DE ARRANQUE AUTOTRANSFOMADOR ....................... 12
FIGURA 4 CONMUTACIÓN ESTRELLA-DELTA .......................................................................... 13
FIGURA 5 MOTOR ASINCRÓNICO DE ROTOR DEVANADO Y REÓSTATO ........................ 15
FIGURA 6 CONEXIÓN DAHLANDER. FORMACIÓN DE POLOS ............................................... 16
FIGURA 7 FRECUENCIA DE UN MOTOR DE CORRIENTE ALTERNA .................................... 22
FIGURA 8 MODULACIÓN POR ANCHO DE PULSOS SINUSOIDAL ........................................ 23
FIGURA 9 MODULACIÓN DE ANCHO DE PULSO SINUSOIDAL UNIDIRECCIONAL ........... 24
FIGURA 10 ONDAS DE SALIDA PWM CUADRADO DEL INVERSORES................................. 25
FIGURA 11 PUENTE INVERSOR TRIFÁSICO ................................................................................ 25
FIGURA 12 VOLTAJE DE SALIDA PARA UN INVERSOR TRIFÁSICO
FIGURA 13 ONDA DE VOLTAJE PARA UN INVERSOR TRIFÁSICO
FIGURA 14 PWM POR MUESTREO REGULAR ............................................................................. 29
FIGURA 15 MODELOS DE LA GAMA MM420 .............................................................................. 30
FIGURA 16 ESQUEMA DE BLOQUES MICROMASTER 420 ....................................................... 34
FIGURA 17 TRES MODELOS DE LA GAMA MICRO MASTER 420 ........................................... 35
FIGURA 18 BORNES DE RED Y ALIMENTACIÓN DEL MOTOR .............................................. 36
FIGURA 19 ESQUEMA DE INSTALACIÓN TÍPICA ...................................................................... 36
FIGURA 20 PANEL AOP (ADVANCED OPERATOR PANEL) ...................................................... 37
FIGURA 21 MÓDULO PROFIBUS, CABLES Y CONECTOR PROFUBUS ................................. 38
FIGURA 22 MÓDULO CAN OPEN .................................................................................................. 39
FIGURA 23 EJEMPLO DE PARÁMETRO DEL MANUAL ............................................................. 41
FIGURA 24 BORNES DEL VARIADOR MM420 ............................................................................. 43
FIGURAN 25 DIRECTRICES DE CABLEADO ................................................................................ 43
FIGURA 26 PANEL SDP ................................................................................................................... 44
FIGURA 27 PANEL BOP .................................................................................................................... 47

xi
ÍNDICE DE ANEXOS
Pág.
ANEXO 1 ROTOR JAULA DE ARDILLA ......................................................................................... 51
ANEXO 2 TIPOS DE MÁQUINAS ASINCRÓNICAS O DE INDUCCIÓN ...................................... 52
ANEXO 3 PARTES DEL ESTATOR JAULA DE ARDILLA ............................................................ 53
ANEXO 4 ASPETOS CONSTRUCTIVOS : PLACA DE CARACTERÍSTICAS ............................. 53
ANEXO 5 PLACA DE BORNES CONEXIONES ESTRELLA TRIÁNGULO .................................. 54
ANEXO 6 PLANEL SDP COLOCADO ............................................................................................... 54
ANEXO 7 ENTRADAS DIGITALES Y ANALÓGICAS .................................................................... 55
ANEXO 8 TERMINALES DE POTENCIA MICROMASTER 420 ................................................... 55
ANEXO 9 SET PARA CONEXIÓN A PC MICROMASTER 420 ...................................................... 56
ANEXO 10 LED’S DE ESTADO MICROMASTER 420 .................................................................... 56

xii
UNIVERSIDAD CENTRAL DEL ECUADOR
FACULTAD DE FILOSOFÍA, LETRAS Y CIENCIAS DE LA EDUCACIÓN
CARRERA DE EDUCACIÓN TÉCNICA
TECNOLOGÍA ELECTROMECÁNICA
“VARIADORES DE FRECUENCIA PARA EL CONTROL DE VELOCIDAD DE MOTORES
ASINCRÓNICOS JAULA DE ARDILLA”.
Autor: Leonardo Xavier Arana Suarez
Tutor: MSc. Edison Eduardo Morales Andino
Quito, 06 de Marzo, 2017
RESUMEN
El estudio cuyo objetivo fue el uso de los conocimientos que se obtuvieron en la carrera, enfocados al
crecimiento profesional, de los trabajadores dentro de la industria. Se ha realizado la investigación del
variador de frecuencia para el control de velocidad de motores asincrónicos jaula de ardilla trifásicos,
que permite la variación de velocidad de los motores eléctricos. En este trabajo utilizamos el variador
de velocidad permitiendo el control de la velocidad y voltaje de un motor eléctrico asincrónico
trifásico, por medio de la regulación de la frecuencia de alimentación suministrada al motor. Este es el
método más eficiente en el manejo de la velocidad en procesos industriales, permitiendo el ahorro
energético, son dos de las principales razones para el empleo de variadores de velocidad, esto
beneficio a los trabajadores dentro de la industria y dando a conocer el procedimiento del uso de los
variadores de frecuencia para el control de velocidad de motores asincrónicos jaula de ardilla se
recomienda tomar las precauciones necesarias para el uso de estos dispositivos, por cuanto los equipos
trabajan con tensiones elevadas.
DESCRIPTORES.- VARIADOR DE FRECUENCIA, CONTROL DE VELOCIDAD,MOTORES
ASINCRÓNICOS, FRECUENCIA DE ALIMENTACIÓN, PROCESOS INDUSTRIALES

xiii
UNIVERSIDAD CENTRAL DEL ECUADOR
FACULTAD DE FILOSOFÍA, LETRAS Y CIENCIAS DE LA EDUCACIÓN
CARRERA DE EDUCACIÓN TÉCNICA
TECNOLOGÍA ELECTROMECÁNICA
“FREQUENCY VARIABLES FOR THE CONTROL OF VELOSITY OF ASYNCHRONIC
ENGINES JAULA DE ARDILLA”.
Autor: Leonardo Xavier Arana Suarez
Tutor: MSC. Edison Morales
Quito, Mar 06, 2017
ABSTRACT
The purpose of this paper was to analyze the use of hydraulic presses mechanical forming processes
as the foundation of industrial process, intellectual development momentum for the production of
quality products in the market today. Most application process occurred in the automotive field and
construction of metal structures, study, selection and formation of a metal part is made, an industrial
process is created by using a hydraulic or mechanical press, the I which was coupled matrices (die -
tooling) and rectangular cutting drawing among others for the construction of metal parts. The study
whose objective was to use the knowledge obtained in the race, focused on professional growth,
students of the School of Technical Education. The processes of cutting and stamping in a press
obtained by the projection of plans, delimitation of technological manufacturing processes, material
selection, design of mounting mechanisms, conducting user manual and safety criteria . The different
processes various products obtained from the use of, steel plates or steel bands also, that benefit
students of the School of Technical Education and new generations revealing the process of using
presses.

1
INTRODUCCIÓN
El presente trabajo investigación pretende el análisis de la utilización de los Variadores de
Frecuencia para el Control de Velocidad de Motores Jaula de Ardilla Trifásicos para aplicarlas en
procesos industriales dando una visión de información en el campo industrial en el área que
interesa con especial atención.
Esta investigación sirve como instructivo de información para los procesos y utilidad de los
Variadores de velocidad en Motores Asincrónicos Jaula de Ardilla.
El Imforme final presenta la siguiente extructura:
En el capítulo I se realiza delimitación del tema, dando a conocer los objetivos y justificaciones del
mismo y en donde va ser utilizado .
En el capítulo II se revisa el Marco Teórico, las técnicas e instrumentos de recolección de datos, la
identificación de las fuentes de información de la que se a recopilado la información.
En el capítulo III se analiza las conclusiones y recomendaciones necesarias en base a lo
investigado en el campo de la utilización de Variadores de Velocidad en Motores Asincrónicos
Jaula de Ardilla en procesos industriales.
Se termina el trabajo con una recopilación de datos, bibliografía, net grafía, y anexos.

2
CAPÍTULO I
DELIMITACIÓN DEL TEMA
“Variadores de frecuencia para el control de velocidad de motores asincrónicos jaula de
ardilla”.
En este trabajo se analiza dentro de las empresas indutriales la utilización de Variadores de
Frecuencia para el Control de Velocidad de motores Asincrónicos Jaula de Ardilla Trifásicos, ya
que existen varios tipos de procesos y aplicaciones de los Variadores de Frecuencia que no se
comprende fácilmente, se los puede utilizar en la creación de diferentes procesos industriales,
pero se puede enfocar en el estudio de estos, para ello se analiza, la definición de un Variadores de
Frecuencia para el control de Velocidad de Motores Asincrónicos Jaula de Ardilla Trifásicos, las
partes que la conforman, diagramas de control, entre otros. La forma que se da mantenimiento a
estas, para el correcto funcionamiento, y así evitar fallas que obliguen a un paro no programado del
mismo; esto significará una pérdida de dinero o problemas innecesarios. Con el constante avance
de la tecnología un técnico debe saber cómo programar un Variador de Frecuencia para el control
de velocidad de un motor Asincrónico Jaula de Ardilla y los diferentes procesos que esta pueda
realizar, así como sus componentes y funcionamiento que se pueden obtener. Con esta información
podrá el técnico estudiar a profundidad lo que es un proceso industrial aplicado en Variadores de
Frecuencia para el Control de Motores Asincrónicos Jaula de Ardilla Trifásicos. Este estudio
también tiene conceptos básicos de electromecánica.
3
OBJETIVOS
Objetivo General
Analizar el funcionamiento del Variador de Frecuencia para el Control de Velocidad de Motores
Asincrónicos Jaula de Ardilla Trifásicos dentro de la industria , tomando en cuenta el tipo de
variador de frecuencia y el motor que se va a utilizar y en tipo de proceso se va a implementar.
Objetivos Específicos
Especificar la composición y estructura de los Variadores de Frecuenia para el Control de
Velocidad de Motores Asincrónicos Jaula de Ardilla Trifásicos.
Detallar las principales razones para el empleo de Variadores de Freuenia para el Control de
Velocidad de Motores Asincrónicos Jaula de Ardilla Trifásicos.
Determinar la prolongación de los Variaores de Frecuencia de acuerdo a los diferentes motores.
JUSTIFICACIÓN
El desarrollo de esta investigación cuyo tema es “VARIADORES DE FRECUENCIA PARA EL
CONTROL DE VELOCIDAD DE MOTORES ASINCRÓNICOS JAULA DE ARDILLA”. es de
fundamental importancia, debido a que en el mercado nacional dentro del área industrial, no se
conoce acerca de un proceso para la implementación de Variadores de Frecuencia para el Control
de Motores Asincrónicos Jaula de Ardilla. Este sector está creciendo rápidamente, la tecnología
empleada en las industrias actuales es anticuada e ineficiente para los procesos que se llevan a cabo
dentro de sus maquinarias.
Fortalecer las labores tecnicas industriales mediante la práctica, a través de la optimización,
instalación y programación de los Variadores de Frecuencia para el Control de Motores de
Asincrónicos Jaula de Ardilla que son los más utilizados, para que el trabajador, operario y
operadores puedan realizar su trabajo con mayor rapidez y mejorar la productividad de las
empresas.

4
DISEÑO DE LA INVESTIGACIÓN
Para la elaboración de la siguiente investigación se ha realizado algunos pasos que resultan de la
indagación de documentos, como la identificación del tema, recopilación e información,
elaboración de objetivos, elaboración de guion de contenidos, la aplicación del tema, elaboración
de conclusiones y comentarios e informe de la monografía.
Para el desarrollo de la presente investigación, se seguirán los siguientes pasos:
1. Identificación del tema.
2. Delimitación del tema.
3. Elaboración de los objetivos.
4. Identificación de las fuentes de información.
5. Elaboración del guion de contenidos.
6. Desarrollo de los contenidos.
7. Aplicación del trabajo.
8. Elaboración de conclusiones y comentarios.
9. Informe de la monografía y de trabajo.
TÉCNICAS E INSTRUMENTOS DE RECOLECCIÓN DE DATOS
En cuanto a las técnicas e instrumentos de recolección de datos que se utilizó para realizar el
informe de la investigación se han seguido las siguientes:
10. Técnica de la lectura.
11. Técnica de fichaje
12. Técnicas de resúmenes.
13. Técnicas de síntesis.
14. Técnicas de análisis de los contenidos, extracción de citas cortas y largas.
15. Identificación de ideas primarias y secundarias.
16. Identificación de las temáticas.
17. Acopio de libros, catálogos y manuales.
5
IDENTIFICACIÓN DE LAS FUENTES DE INFORMACIÓN
Las técnicas para la recolección de datos son técnicas que están acordes al tipo de investigación que
se realizó. Además se tomó fuentes secundarias como investigaciones bibliográficas, audiovisuales
que tengan referencia con el tema de investigación, también documentaciones escritas que son
encontradas en bibliotecas, y en entidades relacionas con el tema, para esto cabe recalcar que esta
investigación se requirió de una amplia fundamentación sobre todo relacionado con el contenido
de investigación.
PROCESAMIENTOS DE LA INFORMACIÓN
Para el diseño de esta monografía se realizó el estudio de conceptos y definiciones de, utilización
de los Variadores de velocidad en Motores Asincrónicos Jaula de Ardilla basándose en la
recopilación de textos, y el uso de citas largas y cortas

6
CAPÍTULO II
MARCO TEÓRICO
INTRODUCCIÓN
Contrariamente a las máquinas asincrónicas empleadas normalmente como generadores, las máquinas
asincrónicas han encontrado su principal aplicación como motores, debido a la sencillez de su
construcción. El motor asincrónico trifásico es hoy el motor usual de accionamiento en todas las redes de
distribución.
Los motores asíncronos o de inducción son un tipo de motores eléctricos de corriente alterna. El primer
prototipo de motor eléctrico capaz de funcionar con corriente alterna fue desarrollado y construido por el
ingeniero Nikola Tesla y presentado en el American Institute of Electrical Engineers (en español,
Instituto Americano de Ingenieros Eléctricos, actualmente IEEE) en 1888.
El motor asíncrono trifásico está formado por un rotor, que puede ser de dos tipos: a) de jaula de ardilla;
b) bobinado, y un estator, en el que se encuentran las bobinas inductoras. Estas bobinas son trifásicas y
están desfasadas entre sí 120º. Según el Teorema de Ferraris, cuando por estas bobinas circula un sistema
de corrientes trifásicas, se induce un campo magnético giratorio que envuelve al rotor. Este campo
magnético variable va a inducir una tensión en el rotor según la Ley de inducción de Faraday.
En este trabajo trataremos todos los temas relacionados con el estudio y los diversos temas relacionados
con la máquina asincrónica o motor de inducción en el caso de que siempre que hablemos de máquinas
asincrónicas el 98% de los casos, este trabaja como motor.

7
Figura1 PARTES DE UN MOTOR ELÉTRICO
FUENTE: MOTORES ELÉCTRICOS, Tecnología eléctrica, Hernández Juan Luis.
Consideraciones generales de las máquinas asincrónicas
El motor de inducción o asincrónico es una máquina de corriente alterna, en la cual la velocidad de
rotación del rotor es menor que la del campo magnético del estator y depende de la carga. El motor
asincrónico tiene la propiedad de ser reversible, es decir, puede funcionar como motor y como
generador.
José Garrigos , 2011 dice :
El principio de funcionamiento de las máquinas asincrónicas se basa en el concepto de
campo magnético giratorio, al igual que cualquier otro dispositivo de conversión
electromecánica de la energía de tipo rotativo, está formada por un estator y un rotor. En el
estator se coloca normalmente el inductor, alimentado por una red monofásica o trifásica. El
rotor es el inducido, y las corrientes que circulan por él aparecen por consecuencia de la
interacción con el flujo del estator. Dependiendo del tipo de rotor, estas máquinas se
clasifican en: a) rotor en jaula de ardilla o en cortocircuito, y b) rotor bobinado o con
anillos.(pag 2)
LOS MOTORES
ASÍNCRONOS CONSTAN DE DOS PARTES FUNDAMENTALES
FUENTE: MOTORES ELÉCTRICOS, Tecnología eléctrica, Hernández Juan Luis.

8
El Rotor
El rotor es el componente que gira (rota) en una máquina eléctrica, sea ésta un motor o un generador
eléctrico. Junto con su contraparte fija, el estátor.
José Garrigos ( 2011) dice : “Es la parte fija del motor. Está constituido por una carcasa en la que está
fijada una corona de chapas de acero al silicio provistas de unas ranuras. Los bobinados de sección
apropiada están dispuestos en dichas ranuras formando las bobinas que se dispondrán en tantos circuitos
como fases tenga la red a la que se conectará la máquina” (p.2)
EL Estator
El estátor es la parte fija de una máquina rotativa y uno de los dos elementos fundamentales para la
transmisión de potencia (en el caso de motores eléctricos) o corriente eléctrica (en el caso de los
generadores eléctricos), siendo el otro su contraparte móvil, el rotor.
Jose Garrigos , 2011 dice que : “Es la parte móvil del motor. Esta situado en el interior del estator y
consiste en un núcleo de chapas de acero al silicio apiladas que forman un cilindro, en el interior del cual
se dispone un bobinado eléctrico” (p.2).
PLACA DE CARACTERÍSTICAS DE UN MOTOR TRIFÁSICO
Fuente:https://www.google.com.ec/=placa+de+características+de+un+motor+trifásico

9
Características de Placa
1. Se trata de un motor trifásico de corriente alterna a 50 Hz.
2. Potencia nominal o asignada en el eje del motor 15 kW.
3. Los bobinados se pueden conectar en estrella hasta una tensión máxima de 380V, circulando en ese
caso una corriente por cada línea de alimentación de 29A.
4. En conexión triángulo la tensión compuesta entre las fases de alimentación podrá ser máximo de 220
V, en cuyo caso circulará por cada una de las líneas de alimentación 50 A.
5. Indica el grado de protección de la carcasa del motor contra agentes externos, atendiendo a la
clasificación establecida por la IEC (Comisión Electrotécnica Internacional), para el caso que nos ocupa:
a.IP54: Carcasa protegida a prueba de polvo y proyecciones de agua.
b.IP55: Carcasa protegida a prueba de polvo y chorros de agua.
6. Cl F: nos indica la clase del motor en lo que se refiere a la máxima temperatura de funcionamiento y
tipo de aislamiento, en este caso clase indica que puede funcionar hasta una temperatura máxima de
155ºC.
Diferentes sistemas de arranque de los motores asíncronos
Arranque de motores asincrónicos con rotor en jaula
Los motores de corriente alterna con rotor en jaula de ardilla se pueden poner en marcha mediante los
métodos de arranque directo o a tensión reducida.
En ambos casos, la corriente de arranque generalmente resulta mayor que la nominal, produciendo las
perturbaciones comentadas en la red de distribución. Estos inconvenientes no son tan importantes en
motores pequeños, que habitualmente pueden arrancar a tensión nominal. La máxima caída de tensión en
la red no debe superar el 15% durante el arranque.
Los circuitos con motores deben contar con interruptores que corten todas las fases o polos
simultáneamente y con protecciones que corten automáticamente cuando la corriente adquiera valores
peligrosos.
En los motores trifásicos debe colocarse una protección automática adicional que corte el circuito cuando
falte una fase o la tensión baje de un valor determinado.

10
Arranque directo
Este método se emplea únicamente en máquinas de una potencia inferior a 5K.
Un motor arranca en forma directa cuando a sus bornes se aplica directamente la tensión nominal a la
que debe trabajar.
José Garrigos , 2011 dice :
Si el motor arranca a plena carga, el bobinado tiende a absorber una cantidad de corriente
muy superior a la nominal, lo que hace que las líneas de alimentación incrementen
considerablemente su carga y como consecuencia directa se reduzca la caída de tensión. La
intensidad de corriente durante la fase de arranque puede tomar valores entre 6 a 8 veces
mayores que la corriente nominal del motor. Su ventaja principal es el elevado par de
arranque, que es 1.5 veces el nominal.(p.10)
Figura2 ARRANQUE DIRECTO
FUENTE: www.moeller.es/descarga.php?file=soporte/12/IT-EE09.pdf
Siempre que sea posible conviene arrancar los motores a plena tensión por el gran par de arranque que se
obtiene, pero si se tuvieran muchos motores de media y gran potencia que paran y arrancan en forma
intermitente, se tendrá un gran problema de perturbaciones en la red eléctrica.
Por lo tanto, de existir algún inconveniente, se debe recurrir a alguno de los métodos de arranque por
tensión reducida.

11
Arranque a tensión reducida de motores asíncronos con rotor en jaula de ardilla.
Los motores de cortocircuito suelen consumir en el arranque corriente muy elevadas, que para el caso de
potencias elevadas
José Garrigos , 2011 dice que : “Este método se utiliza para motores que no necesitan un gran par de
arranque. Este método consiste en producir en el momento de arranque una tensión menor que la
nominal en los arrollamientos del motor. Al reducir la tensión se reduce proporcionalmente la corriente,
la intensidad del campo magnético y el par motriz”(p.12).
Entre los métodos de arranque por tensión reducida más utilizados podemos citar; conmutación estrella-
triangulo y el de arrancador electrónico
Arranque por autotransformador
Consiste en intercalar un autotransformador entre la red y el motor, de tal forma que la tensión aplicada
en el arranque sea solo una fracción de la asignada. El proceso puede realizarse en dos o tres escalones y
con tensiones no inferiores al 40, 60 y 75% de la tensión de la línea.
Se aplica a motores cuya potencia nominal es mayor que 5Kw. El autotransformador de arranque es un
dispositivo similar al estrella-triángulo, salvo por el hecho de que la tensión reducida en el arranque se
logra mediante bobinas auxiliares que permiten aumentar la tensión en forma escalonada, permitiendo un
arranque suave.
Su único inconveniente es que las conmutaciones de las etapas se realizan bruscamente, produciendo en
algunas ocasiones daños perjudiciales al sistema mecánico o a la máquina accionada. Por ejemplo,
desgaste prematuro en los acoplamientos (correas, cadenas, engranajes o embragues de acoplamiento) o
en casos extremos roturas por fatiga del eje o rodamientos del motor, producido por los grandes
esfuerzos realizados en el momento de arranque.
Este método de arranque es posible solo en los casos cuando el par de frenado durante el arranque no es
grande. De lo contrario el motor no podrá iniciar la marcha.
Una variante menos usada es la conexión Kusa, en la que durante el proceso de arranque se intercala una
resistencia en uno de los conductores de línea.
Es decir, que la corriente de arranque depende de la tensión de alimentación del motor. Si disminuimos
la tensión de alimentación en el momento del arranque, reduciremos la corriente de arranque.

12
Una vez que el motor alcance una determinada velocidad, con s<1, procederemos a restablecer la
tensión nominal de alimentación.
Figura3 Esquema eléctrico del arranque con autotransfomador
fuente: www.moeller.es/descarga.php?file=soporte/12/it-ee09.pdf
En la fig. 3 se muestra un arranque por autotransformador, con dos etapas de tensión. En la posición 1
del conmutador se alimenta el autotransformador con tensión de la red, aplicando al motor solamente una
fracción de esta tensión de la red etapa de arranque). Cuando la maquina ha aumentado su velocidad
hasta un valor adecuado, cercano al asignado, el conmutador se pasa a la posición 2, lo que eleva la
tensión que llega al motor y este sigue aumentando de velocidad. Finalmente se pasa el conmutador a la
posición 3, de tal forma que la tensión de la red queda aplicada directamente al estator de la red.
Conmutación estrella-Delta
Con independencia del arranque directo, el arrancador estrella triángulo es el sistema de arranque más
utilizado en los motores asíncronos de inducción.
Este método de arranque se puede aplicar tanto a motores de rotor devanado como a motores de rotor
jaula de ardilla, la única condición que debe cumplir el motor para que pueda aplicarse este método de
arranque es que tenga acceso completo a los devanados del estator (6 bornes de conexión).
Este método solamente se puede utilizar en aquellos motores que estén preparados para funcionar en
delta con la tensión de la red, si no es así no se le puede conectar. La máquina se conecta en estrella en el
momento del arranque y se pasa después a delta cuando está en funcionamiento.

13
La conmutación de estrella-delta generalmente se hace de forma automática luego de transcurrido un
lapso (que puede regularse) en que el motor alcanza determinada velocidad.
El arranque estrella-delta es el procedimiento más empleado para el arranque a tensión reducida debido a
que su construcción es simple, su precio es reducido y tiene una buena confiabilidad.
En el caso más simple tres contactos realizan la tarea de maniobrar el motor, disponiendo de
enclavamientos adecuados. La protección del motor se hace por medio de un relé térmico. El térmico
debe estar colocado en las fases del motor.
La regulación del mismo debe hacerse a un valor que resulta de multiplicar la corriente de línea por 0,58.
La protección del circuito más adecuada también es el fusible.
Algunas indicaciones que se deben tener en cuenta sobre el punto de conmutación son: el pico de
corriente que toma el motor al conectar a plena tensión (etapa delta) debe ser el menor posible; por ello,
la conmutación debe efectuarse cuando el motor esté cercano a su velocidad nominal (95% de la misma),
es decir cuando la corriente de arranque baje prácticamente a su valor normal en la etapa de estrella.
Asimismo, el relé de tiempo debe ajustarse para conmutar en este momento, no antes ni mucho después.
Habitualmente, un arranque normal puede durar hasta 10 segundos, si supera los 12 segundos se debe
consultar al proveedor del equipo. Si no se cumple con lo anterior, el pico de corriente que se produce al
pasar a la etapa de triángulo es muy alto, perjudicando a los contactos, al motor y a la máquina
accionada. El efecto es similar al de un arranque directo.
Figura 4conmutación estrella-delta
FUENTE:www.moeller.es/descarga.php?file=soporte/12/IT-EE09.pdf

14
La operación se realiza en la actualidad con automatismos de contactores, con un circuito de fuerza y
otro con mando o control; se requiere tres contactores, uno denominado principal, para la alimentación
de los principios de la bobina de los devanados del motor; otro un contactor que se encarga de realizar la
conexión al devanado en estrella, y el tercero ejecuta la conexión triangulo; además se necesita de un relé
de tiempo para ajustar el momento en que se pasa de la conexión estrella a la conexión triangulo.
Arranque de motores asincrónicos con rotor en jaula por dispositivos electrónicos
Los arrancadores electrónicos son una mejor solución que los autotransformadores gracias a la
posibilidad de su arranque suave, permitiendo un aumento en la vida útil de todas las partes
involucradas.
Los mismos consisten básicamente en un convertidor estático alterna-continua-alterna o alterna-alterna,
generalmente de tiristores, que permiten el arranque de motores de corriente alterna con aplicación
progresiva de tensión, con la consiguiente limitación de corriente y par de arranque. En algunos modelos
también se varía la frecuencia aplicada. Al iniciar el arranque, los tiristores dejan pasar la corriente que
alimenta el motor según la programación realizada en el circuito de maniobra, que irá aumentando hasta
alcanzar los valores nominales de la tensión de servicio.
La posibilidad de arranque progresivo, también se puede utilizar para detener el motor, de manera que
vaya reduciendo la tensión hasta el momento de la detención.
Estos arrancadores ofrecen selección de parada suave, evitando por ejemplo, los dañinos golpes de ariete
en las cañerías durante la parada de las bombas; y detención por inyección de corriente continua para la
parada más rápida de las masas en movimiento.
Además poseen protecciones por asimetría, contra sobre temperatura y sobrecarga, contra falla de
tiristores, vigilancia del tiempo de arranque con limitación de la corriente, control de servicio con
inversión de marcha, optimización del factor de potencia a carga parcial, maximizando el ahorro de
energía durante el proceso y permiten un ahorro en el mantenimiento por ausencia de partes en
movimiento que sufran desgastes.

15
Arranque de los motores asíncronos con rotor bobinado
Figura 5 Motor asincrónico de rotor devanado y reóstato de arranque correspondiente
FUENTE: www.monografias.com › Ingenieria
En los motores de rotor devanado o con anillos se puede reducir la corriente de arranque introduciendo
una resistencia adicional en cada una de las fases del rotor. La operación se realiza con la ayuda de un
reóstato trifásico, como se indica en la figura, donde se ha supuesto que los devanados de la maquina
están conectados en estrella.
En el arranque se introduce toda la resistencia adicional (posición 1), de esta forma aumenta la
impedancia de la máquina y se reduce la corriente inicial; conforme al motor inicia su marcha, se va
eliminando la resistencia del reóstato pasando el mando móvil a las posiciones 2,3 y 4, que conforman
una serie de contactos, en la última parte queda cortocircuitado el rotor y finaliza la operación de
arranque.
En esta situación, para reducir las pérdidas mecánicas del motor y también el desgaste de anillos y
escobillas, estas máquinas llevan a menudo dispositivos para levantar las escobillas y poner en
cortocircuito los anillos. Hoy día esta operación de arranque se realiza automáticamente por mediación
de contacto res y relés de tiempo que van eliminando secuencialmente las resistencias adicionales.
Este método de arranque sólo se puede aplicar a motores de rotor devanado. Como se comprueba
fácilmente, al introducir una resistencia adicional en el devanado del rotor, se disminuye la corriente de
arranque con relación a la corriente absorbida por el método de arranque directo.

16
Diferentes métodos de regulación de velocidad de los motores asincrónicos
Regulación por variación de número de polos
Graling(2004) dice que:
Variando el número de polos del estator de la máquina, cambia la velocidad del campo giratorio
y en consecuencia varia la velocidad de rotación del rotor. El procedimiento utiliza diversos
devanados en el estator dependiendo de las velocidades que se quiera obtener; generalmente, por
limitación de espacio de las ranuras suelen emplearse dos combinaciones diferentes, dando lugar
a dos r.pm., asíncronas cercanas a 3.000, 1.500, 750, 500, etc., (a 50Hz). Para que el
funcionamiento sea posible es preciso que el rotor sea jaula de ardilla, ya que este tipo de rotor
adapta automáticamente por inducción su número de polos al existente en el estator. Con
frecuencia se emplean dos escalones de velocidad en la relación 2:1, y con un solo devanado que
se conmuta adecuadamente, lo que se denomina conexión Dahlander.(p.52)
En este caso, cada fase del devanado consta de dos partes iguales, que pueden ponerse en serie o en
paralelo, dando lugar a una reducción de pares de polos a la mitad del original, aumentando en
consecuencia la velocidad del rotor a prácticamente el doble.
Figura6 Conexión Dahlander. Formación de polos
Fuente:.https://es.scribd.com/doc/56278827/Motor-Dahlander
En la fig. Se muestra el procedimiento adecuado utilizado. En a) se muestra el devanado formado por 4
polos, estando las bobinas conectadas en serie. En b) se muestra el devanado formado por 2 polos, con
bobinas conectadas en paralelo; se observa en este caso que la corriente en la bobina c-d ha sufrido una
inversión.

17
Variador de frecuencia o velocidad
Un variador de frecuencia (siglas VFD, del inglés: Variable Frequency Drive o bien AFD Adjustable
Frequency Drive) es un sistema para el control de la velocidad rotacional de un motor de corriente
alterna (AC) por medio del control de la frecuencia de alimentación suministrada al motor.
Piñero. (2015) die que: “Los variadores son convertidores de energía encargados de modular la energía
que recibe el motor. Otra definición sería, los variadores de velocidad son dispositivos que permiten
variar la velocidad y la acopla de los motores asíncronos trifásicos, convirtiendo las magnitudes fijas de
frecuencia y tensión de red en magnitudes variables” (p.8).
Los variadores de velocidad son dispositivos electrónicos que permiten variar la velocidad y la cupla de
los motores asincrónicos trifásicos, convirtiendo las magnitudes fijas de frecuencia y tensión de red en
magnitudes variables.
Se utilizan estos equipos cuando las necesidades de la aplicación sean:
- Dominio de par y la velocidad
- Regulación sin golpes mecánicos
- Movimientos complejos
- Mecánica delicada
Ventajas de la utilización del Variador de Velocidad en el arranque de motores asíncronos
El variador de velocidad no tiene elementos móviles, ni contactos.
La conexión del cableado es muy sencilla.
Permite arranques suaves, progresivos y sin saltos.
Controla la aceleración y el frenado progresivo.
Limita la corriente de arranque.
Permite el control de rampas de aceleración y deceleración regulables en el tiempo.
Consigue un ahorro de energía cuando el motor funcione parcialmente cargado, con acción
directa sobre el factor de potencia
Puede detectar y controlar la falta de fase a la entrada y salida de un equipo. Protege al motor.
Puede controlarse directamente a través de un autómata o microprocesador.
Se obtiene un mayor rendimiento del motor.
Nos permite ver las variables (tensión, frecuencia, rpm, etc…).

18
Inconvenientes de la utilización del Variador de Velocidad en el arranque de motores asíncronos
Es un sistema caro, pero rentable a largo plazo.
Requiere estudio de las especificaciones del fabricante.
Requiere un tiempo para realizar la programación.
Tipos de variadores de velocidad
Los mas generales, se puede decirse que existen tres tipos básicos de variadores de velocidad:
mecánicos, hidráulicos y eléctrico-electrónicos, siendo este último de interés para el temapropuesto.
Variadores eléctrico-electrónicos
Mansilla,(2011) dice que: “Los variadores eléctrico-electrónicos incluyen tanto el controlador como el
motor eléctrico, sin embargo es práctica común emplear el término variador únicamente al controlador
eléctrico”(p.5).
Los primeros variadores de esta categoría emplearon la tecnología de los tubos de vacío. Con los
años después se han ido incorporando dispositivos de estado sólido, lo cual ha reducido
significativamente el volumen y costo, mejorando la eficiencia y confiabilidad de los dispositivos.
Existen cuatro categorías de variadores de velocidad eléctrico-electrónicos
- variadores para motores de DC.
- variadores de velocidad por corrientes de Eddy.
- variadores de deslizamiento.
- Variadores para motores de CA (también conocidos como variadores de frecuencia).
Variadores para motores de DC
Los variadores de velocidad son dispositivos que permiten variar la velocidad de un motor controlado
eléctricamente.
Mansilla,(2011) dice que: “Estos variadores permiten controlar la velocidad de motores de corriente
directa serie, derivación, compuesto y de imanes permanentes”(p.5).
Para el caso de cualquiera de las máquinas anteriores se cumple la siguiente expresión:
Vt K.FM .Nm
Donde: Vt Voltaje terminal (V).
19
K Constante de la máquina.
FM Flujo magnético producido por el campo (Wb)
Nm Velocidad mecánica (rpm).
Este tipo de variadores puede controlar la velocidad de un motor de DC: controlando su voltaje
terminal, o bien, manipulando el valor de la corriente de campo.
Variadores por corrientes de Eddy
Mansilla,(2011) dice que:
Un variador de velocidad por corrientes de Eddy consta de un motor de velocidad fija y un
embrague de corrientes de Eddy. El embrague contiene un rotor de velocidad fija (acoplado
al motor) y un rotor de velocidad variable, separados por un pequeño entrehierro. Se
cuenta, además, con una bobina de campo, cuya corriente puede ser regulada, la cual
produce un campo magnético que determinará el par mecánico transmitido del rotor de
entrada al rotor de salida. De esta forma, a mayor intensidad de campo magnético, mayor
par y velocidad transmitidos, y a menor campo magnético menores serán el par y la
velocidad en el rotor de salida.(p,6)
El control de la velocidad de salida de este tipo de variadores generalmente se realiza por medio de lazo
cerrado, utilizando como elemento de retroalimentación un tacómetro de corriente alterna (AC).
Variadores de deslizamiento
Este tipo de variadores se aplica únicamente para los motores de inducción de rotor devanado. En
cualquier motor de inducción, la velocidad mecánica (Nm) puede determinarse mediante la siguiente
expresión:

20
Nm120.f.(1 s
Donde “s” es el deslizamiento del motor, cuyo valor oscila entre 0 y 1. De esta forma, a mayor
deslizamiento, menor velocidad mecánica del motor. El deslizamiento puede incrementarse al
aumentar la resistencia del devanado del rotor, o bien, al reducir el voltaje en el devanado del rotor.
De esta forma es que puede conseguirse el control de la velocidad en los motores de inducción de
rotor devanado. Sin embargo, este tipo de variadores es de menor eficiencia que otros, razón por la
cual en la actualidad tiene muy pocaaplicación.
Variadores para motores de AC
Son dispositivos que permiten variar la velocidad electrónicamente mediante una variable eléctrica
conocida como frecuencia esto es para el caso de Drives para motores de AC, en contra parte los
variadores de velocidad para motores de CD modifican el valor del voltaje para variar la velocidad de
los motores.
Mansilla,(2011) dice que: “Los variadores de frecuencia (siglas AFD, del inglés Adjustable Frecuency
Drive; o bien VFD Variable Frecuency Drive) permiten controlar la velocidad tanto de motores de
inducción (asíncronos de jaula de ardilla o de rotor devanado), como de los motores síncronos
mediante el ajuste de la frecuencia de alimentación almotor”(P.8).
Nm = velocidad mecánica (rpm)
f = frecuencia de alimentación (Hz)
s = deslizamiento (adimensional)
P = número de polos (adimensional)
Como puede verse en las expresiones , la frecuencia y la velocidad son directamente proporcionales,
de tal manera que al aumentar la frecuencia de alimentación al motor, se incrementará la velocidad
de la flecha, y al reducir el valor de la frecuencia disminuirá la velocidad del eje. Por ello es que este
tipo de variadores manipula la frecuencia de alimentación al motor a fin de obtener el control de la
velocidad de la máquina
Estos variadores mantienen la razón Voltaje/ Frecuencia (V/Hz) constante entre los valores mínimo
y máximos de la frecuencia de operación, con la finalidad de evitar la saturación magnética del
núcleo del motor y además porque el hecho de operar el motor a un voltaje constante por encima de
21
una frecuencia dada (reduciendo la relación V/Hz) disminuye el par del motor y la capacidad del
mismo para proporcionar potencia constante de salida en el motor.
Composición de los variadores de frecuencia
Piñero. (2015) die que: “El variador regula la frecuencia del voltaje aplicado al motor, logrando
modificar su velocidad. Sin embargo, simultáneamente con el cambio de frecuencia, debe variarse el
voltaje aplicado al motor para evitar la saturación del flujo magnético con una elevación de la
corriente que dañaría el motor”(p.15).
Los variadores de frecuencia están compuestos por:
Etapa Rectificadora.-Convierte la tensión alterna en continua mediante rectificadores de diodos,
tiristores,etc.
Etapa intermedia.-Existe un filtro para suavizar la tensión rectificada y reducir la emisión de
armónicos.
Inversor o "Invertir".-Convierte la tensión continua en otra de tensión y frecuencia variable
mediante la generación de pulsos. Actualmente se emplean IGBT´s (Isolated Gate Bipolar
Transistors) para generar los pulsos controlados de tensión. Los equipos más modernos utilizan
IGBT´s inteligentes que incorporan un microprocesador con todas las protecciones por sobre
corriente, sobretensión, baja tensión, cortocircuitos, puesta a masa del motor, sobre temperaturas, etc.
Etapa de control.- Esta etapa controla los IGBT´s para generar los pulsos variables de tensión y
frecuencia. Y además controla los parámetros externos en general, etc.
Los variadores utilizan modulación PWM (Modulación de Ancho de Pulsos) y usan en la etapa
rectificadora puente de diodos rectificadores. En la etapa intermedia se usan condensadores y
bobinas para disminuir las armónicas y mejorar el factor de potencia a través de cálculos
matemáticos.
Métodos para llevar a cabo la variación e inversores para control de velocidad de motores de
inducción mediante relación voltaje frecuencia
Salazar.(2011) dice que : “De acuerdo al método para variar la velocidad sincrónica de un motor
trifásico de corriente alterna, debemos alimentar el motor con una tensión y frecuencia variable,
dependiendo de la velocidad que se quiera. Es muy importante tener en cuenta que al modificar la
frecuencia que se aplica al estator, es necesario variar la tensión aplicada de la misma forma y en la
misma magnitud”(p.12.).

22
Esto se debe hacer para mantener el mismo grado de saturación y densidad de flujo en el entrehierro
del motor.
Por medio de tiristores
Salazar.(2011) dice que :
Los tiristores fueron parte fundamental del control de velocidad para motores de (CA)
por variación de frecuencia. En un principio solo estos elementos podían ser utilizados
para este fin, pues no existía en el mercado otro tipo de semiconductores que pudieran
suministrar las corrientes que estos variadores demandan. Además, este tipo de
semiconductores, debiendo Ser de potencia, tenían un alto costo. Esta característica
hacía casi imposible su empleo en este tipo de equipos para motores de corriente
continua.(p.13).
Con el adviento de nuevas tecnologías para la fabricación de semiconductores, los tiristores fueron
desplazados y en su lugar se fueron utilizando transistores de potencia, MOSFETS de potencia, y
últimamente IGBTs.
Uno de los principales problemas que se afrontaban con los tiristores era toda la circuitería paralela
que se debía diseñar para su apagado. Además se tenía que emplear un gran número de tiristores
dentro del diseño, ya que el control de velocidad para motores de AC prácticamente era dos
controles en uno; un control de voltaje para la parte de voltaje de DC y otro para la parte de
frecuencia. Esto se puede ver en la figura:
Figura 7 Control de frecuencia de un motor de corriente alterna
Fuente:https://es.wikipedia.org/wiki/Modulación_por_ancho_de_puls

23
Control del voltaje y frecuencia mediante modulación de ancho de pulso (PWM)
Mediante esta técnica se puede controlar la magnitud y frecuencia de la señal de salida mediante la
modulación del ancho de pulso de los interruptores del inversor.
Gutiérrez(2011) dice que:“El PWM es el proceso de modificar el ancho de los pulsos de un tren de
pulsos en razón directa a una pequeña señal de control; cuando mayor sea el voltaje de control, será
más ancho el pulso resultante”(p15).
Existen diferentes tipos de modulación por ancho de pulso, tales como: modulación por ancho de
pulso único, por ancho de pulso múltiple, sinusoidal, sinusoidal modificado, entre otros, cada uno
con sus respectivas características.
Gutiérrez,(2011) dice que: “Las señales de control, se generan comparando a una señal de referencia
sinusoidal de amplitud Ar, con una onda portadora triangular de amplitud Ac y frecuencia fr. La
variable de control es el índice de modulación de amplitud (M), o índice de modulación, el cual es la
relación de Ar entre Ac”(p.16).
Si se varía Ar desde 0 hasta Ac, se puede modificar el ancho de pulso δ, de 0º a 180º. De esta
manera, la amplitud pico de la senoidal controla el índice de modulación M, y en consecuencia el
voltaje RMS de salida V0.
La figura 8 muestra lo explicado anteriormente.
Figura 8 : Modulación por ancho de pulsos sinusoidal
Fuente:https://es.wikipedia.org/wiki/Modulación_por_ancho_de_puls

24
Se puede observar que el área de cada pulso corresponde en forma aproximada, al área bajo la onda
sinusoidal, entre los puntos medios adyacentes de los periodos de apagado de las señales de control.
Se generan las mismas señales de disparo con una onda portadora triangular unidireccional como se
ve en la figura
Figura 9 Modulación de ancho de pulso sinusoidal unidireccional
Fuente:https://es.wikipedia.org/wiki/Modulación_por_ancho_de_pulsos
Al analizar el resultado de la forma de onda de la modulación de ancho de pulso sinusoidal
unidireccional, se nota que para las señales de control en un puente inversor trifásico, el semiciclo
positivo puede ser idéntico al semiciclo negativo, desfasado este último 180⁰.
En base a esta característica, las señales de control se pueden basar sólo en los valores de la señal
PWM resultante de un semiciclo.
PWM cuadrado y puente inversor trifásico:
Gutiérrez,(2011) dice que:
Una forma alternativa de PWM, conocida como modulación en anchura de varios
pulsos por semiperiodos o PWM de onda cuadrada, implica obtener una serie de pulsos
de igual anchura en cada medio ciclo, como se puede ver en la figura 2.8. Esto se lleva a
cabo conmutando la mitad del puente a la frecuencia fundamental requerida y la otra
mitad a un múltiplo de la misma. La relación T1/ (T1+T2), es denominada el ciclo de
trabajo de la onda PWM, y la magnitud del voltaje fundamental de salida se controla al
variarse éste, denominándose PMW cuadrado.(p.18)
A voltaje reducido de salida se obtiene un contenido armónico de orden menor mediante esta
técnica.
Para el efecto, se requiere circuitos de control en el que una onda portadora triangular es comparada
con una onda cuadrada de referencia con la frecuencia de salida deseada.

25
Figura 10 Ondas de salida PWM cuadrado del inversor: (a) voltajes de entrada del
comparador; (b) salida del comparador y voltaje en las terminales
Fuente: https://es.wikipedia.org/wiki/Modulaciónporancho de pulsos
En un inversor trifásico (figura 10 ) cada medio ciclo tiene un comparador separado, el cual es
alimentado por la misma portadora triangular. Sin embargo, las tres ondas cuadradas de referencia
tienen un desplazamiento de 120⁰, formando un sistema balanceado de tres fases.
La figura 10 muestra las ondas cuadradas de referencia para las fases A, B; y C, y la portadora
triangular común a ellas, para una relación de seis. Los voltajes de polo VA0, VB0 y VC0 también
semuestran.
Figura 11: Puente inversor trifásico
Fuente: https://es.wikipedia.org/wiki/Modulaciónporancho de pulsos
Como es usual, el voltaje de línea VAB = VA0 – VB0, dando una serie de pulsos de igual anchura
uniformemente separados, de amplitud Vd. en cada medio ciclo, con un pulso de media anchura a
los extremos.
26
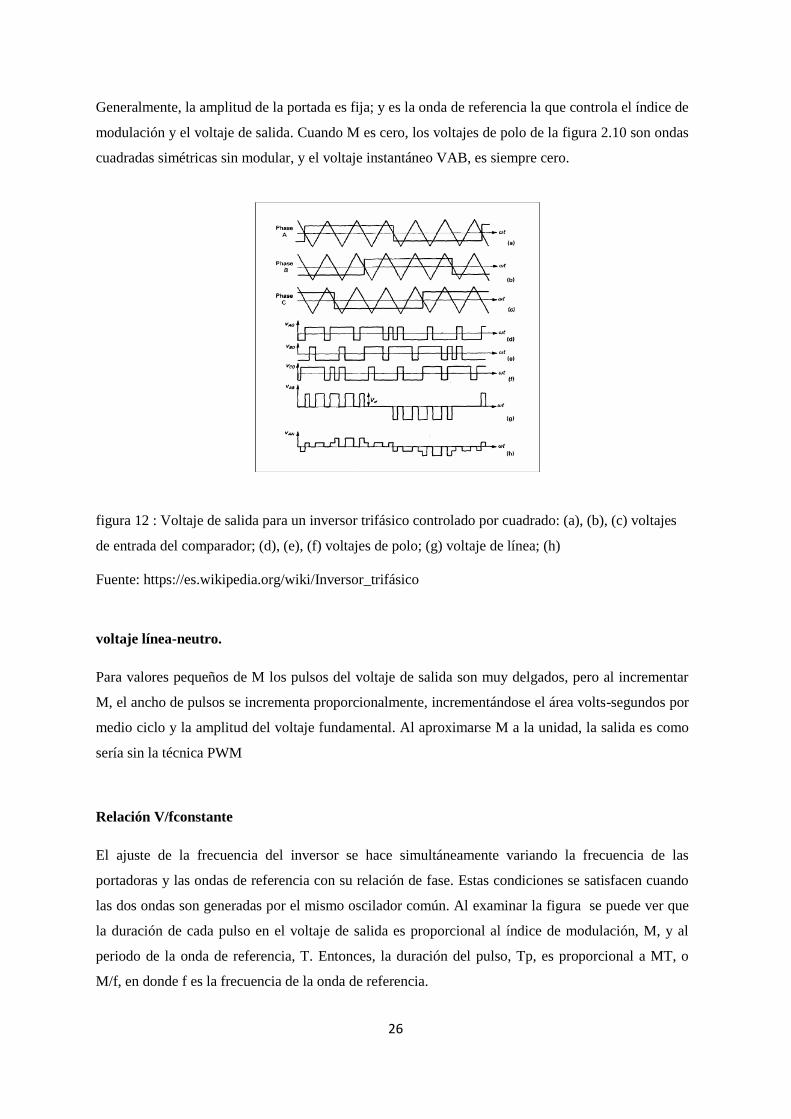
Generalmente, la amplitud de la portada es fija; y es la onda de referencia la que controla el índice de
modulación y el voltaje de salida. Cuando M es cero, los voltajes de polo de la figura 2.10 son ondas
cuadradas simétricas sin modular, y el voltaje instantáneo VAB, es siempre cero.
figura 12 : Voltaje de salida para un inversor trifásico controlado por cuadrado: (a), (b), (c) voltajes
de entrada del comparador; (d), (e), (f) voltajes de polo; (g) voltaje de línea; (h)
Fuente: https://es.wikipedia.org/wiki/Inversor_trifásico
voltaje línea-neutro.
Para valores pequeños de M los pulsos del voltaje de salida son muy delgados, pero al incrementar
M, el ancho de pulsos se incrementa proporcionalmente, incrementándose el área volts-segundos por
medio ciclo y la amplitud del voltaje fundamental. Al aproximarse M a la unidad, la salida es como
sería sin la técnica PWM
Relación V/fconstante
El ajuste de la frecuencia del inversor se hace simultáneamente variando la frecuencia de las
portadoras y las ondas de referencia con su relación de fase. Estas condiciones se satisfacen cuando
las dos ondas son generadas por el mismo oscilador común. Al examinar la figura se puede ver que
la duración de cada pulso en el voltaje de salida es proporcional al índice de modulación, M, y al
periodo de la onda de referencia, T. Entonces, la duración del pulso, Tp, es proporcional a MT, o
M/f, en donde f es la frecuencia de la onda de referencia.
27
Si la amplitud de la onda de referencia es variada linealmente con la frecuencia, entonces la
relaciónM/fesconstante,yladuracióndelpulso,Tp,esindependientedelafrecuencia.
En Consecuencia, el área volts-segundos por medio ciclo es la misma a todas las frecuencias, lo que
implica una operación con relación volts/hertzio constante. O desde otro punto de vista, ya que la
amplitud del voltaje fundamental es función lineal de M, una relación constante de M/f implica
V/fconstante.
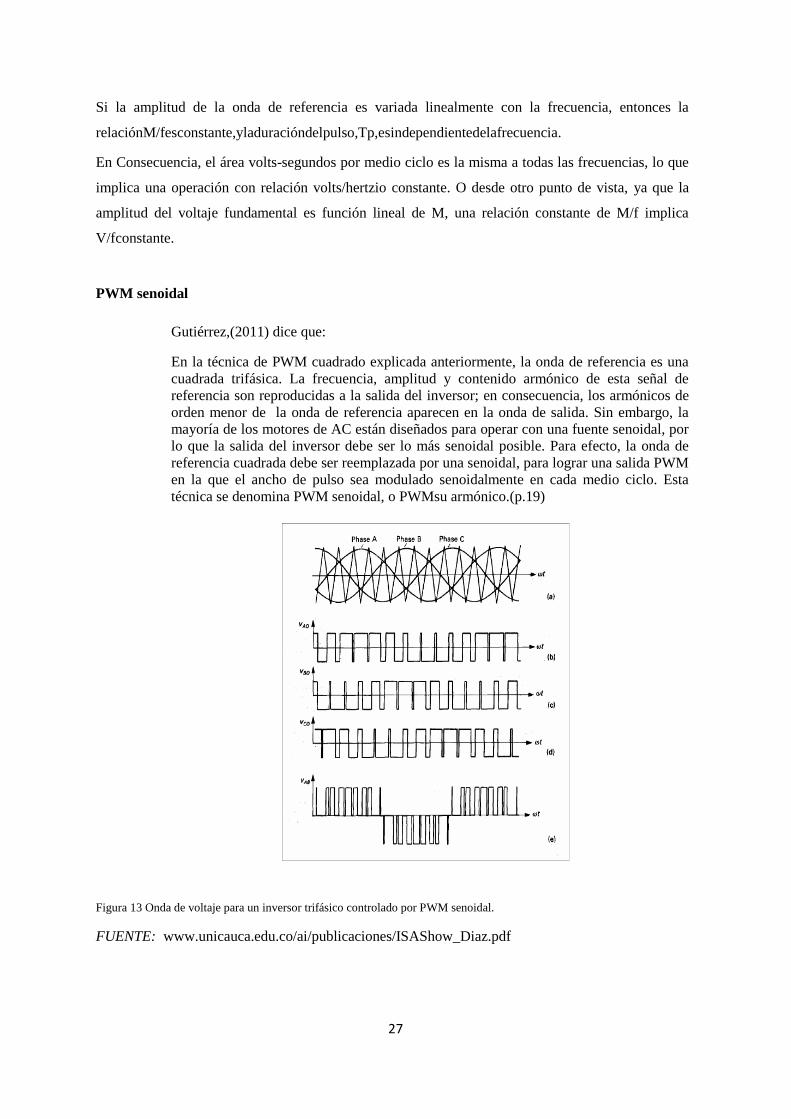
PWM senoidal
Gutiérrez,(2011) dice que:
En la técnica de PWM cuadrado explicada anteriormente, la onda de referencia es una
cuadrada trifásica. La frecuencia, amplitud y contenido armónico de esta señal de
referencia son reproducidas a la salida del inversor; en consecuencia, los armónicos de
orden menor de la onda de referencia aparecen en la onda de salida. Sin embargo, la
mayoría de los motores de AC están diseñados para operar con una fuente senoidal, por
lo que la salida del inversor debe ser lo más senoidal posible. Para efecto, la onda de
referencia cuadrada debe ser reemplazada por una senoidal, para lograr una salida PWM
en la que el ancho de pulso sea modulado senoidalmente en cada medio ciclo. Esta
técnica se denomina PWM senoidal, o PWMsu armónico.(p.19)
Figura 13 Onda de voltaje para un inversor trifásico controlado por PWM senoidal.
FUENTE: www.unicauca.edu.co/ai/publicaciones/ISAShow_Diaz.pdf
28
El control del voltaje de salida se realiza variando la amplitud de la onda senoidal. Esta variación
altera los anchos de pulso en el voltaje de salida, pero preserva el patrón de modulación senoidal.
Gutiérrez,(2011) dice que: “La operación mediante frecuencia ajustable de una onda modulada
senoidalmente a la salida del inversor para el control de velocidad de un motor de AC, requiere la
generación de las tres ondas senoidales trifásicas con amplitud y frecuencia variables”(p.19)
Si el motor opera a velocidad muy baja, el oscilador de referencia debe tener capacidad de baja
frecuencia hasta cero hertzios. Muchos de los inversores PWM adopta el PWM cuadrado; sin
embargo, la implementación de PWM senoidal ha sido facilitada por modernas técnicas digitales
utilizando memorias programadas o circuitos integrados a gran escala.
Control digital de un inversor PWM
Gutiérrez,(2011) dice que:
En los últimos años, se ha hecho énfasis en el uso de técnicas digitales para la
generación de ondas PWM. La técnica de PWM senoidal emplea una onda senoidal
modulante, la cual es comparada con una portadora triangular para determinar los
instantes de conmutación del inversor. Esta técnica es conocida como PWM por
muestreo natural, y ha sido adoptada ampliamente por su fácil implementación
analógica. Mediante técnicas digitales, la onda senoidal de referencia puede ser
almacenada como una tabla en memoria ROM, y los valores de la onda senoidal son
accedidos a una velocidad correspondiente a la frecuencia fundamentalrequerida.(p.20)
Una onda portadora triangular es generada usando un contador, y las dos ondas se comparan
digitalmente. Sin embargo, el muestreo natural es esencialmente una técnica analógica; y esta forma
de implementación digital no es muy efectiva; en un inversor PWM controlado por un
microprocesador, es difícil calcular los anchos de pulsos de la señal por muestreo natural porque no
están definidos por alguna expresión analítica.
29
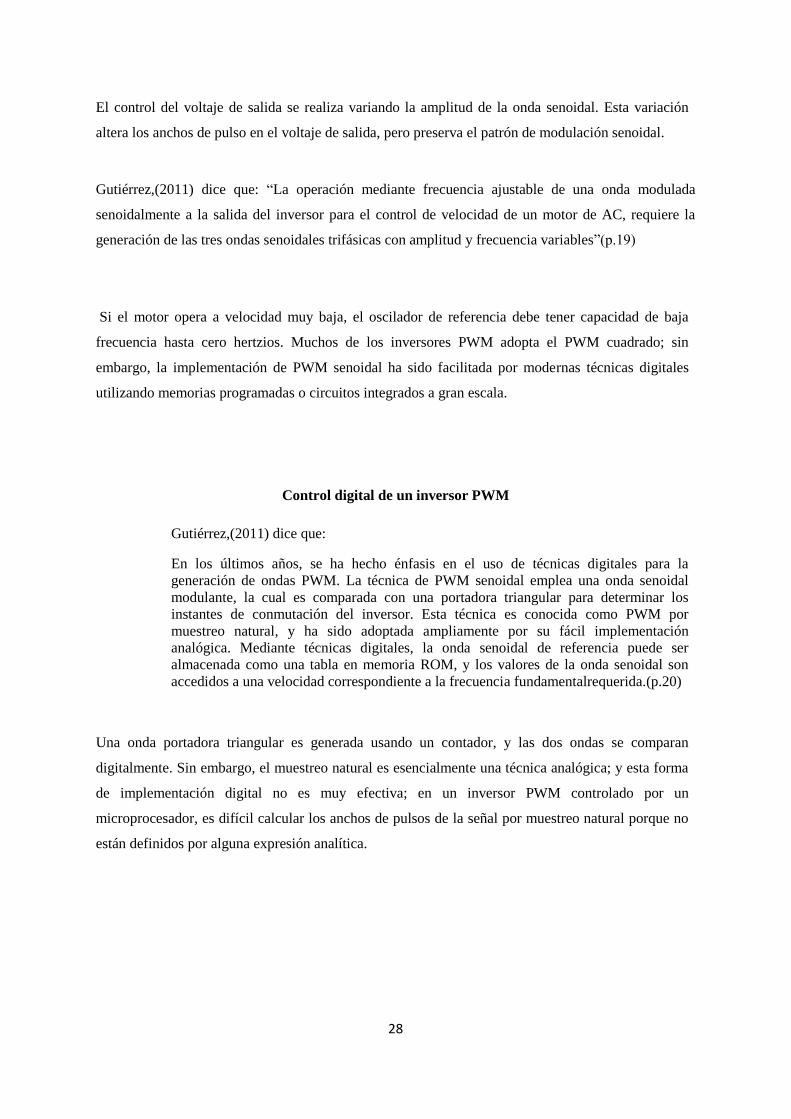
PWM por muestreo regular
Una forma alternativa similar, de naturaleza digital, se muestra en la figura 2.12. La onda modulante
senoidal es ahora muestreada en intervalos regulares correspondiendo a los picos.
Figura 14 PWM por muestreo regular: (a) señal senoidal modulante y versión simple-and- hold; (b)
voltajes de entrada del comparador; (c) voltaje de salida del comparador o voltaje de polo.
FUENTE: www.unicauca.edu.co/ai/publicaciones/ISAShow_Diaz.pdf
Se realiza la siguiente muestra. Este proceso resulta en una versión escalonada, o modulada
en amplitud; de la onda de referencia. Esta onda escalonada, es comparada con la portadora triangular,
y los puntos de intersección determinan los instantes de conmutación del inversor.
La versión simple – and-hold de la onda modulante tiene una magnitud constante para cada pulso.
Por lo tanto, el ancho de pulsos es proporcional a la altura del escalón, y el centro de cada pulso
ocurre a intervalos uniformes espaciados. De ahí que se le llame muestreo regular o uniforme.

30
El variador de frecuencia MICROMASTER 420
Introducción
Como ya adelantamos anteriormente, vamos hacer especial hincapié en el variador Micro master 420
de Siemens.
La gama de modelos disponible abarca desde entrada monofásica de 120W a entrada trifásica de
11kW. Usan microprocesadores para su control así como IGBT´s para general su señal de salida con
modulación PWM.
MICROMASTER 420 (2000) dice: “Tiene diferentes opciones para una comunicación externa, como
el PC, distintos paneles y Profibus. Además posee una extensa lista de parámetros por lo que podemos
usarlo en aplicaciones simples o para aplicaciones de control de motores más avanzadas”(p.16).
Figura 15 Modelos de la gama MM420
FUENTE: https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF
También incorpora medidas de protección para los siguientes casos:
Protección de sobretensión/mínima tensión.
Protección de sobre temperatura para el convertidor.
Protección de defecto a tierra.
Protección de cortocircuito.
Protección térmica del motor por I2t.

31
Datos técnicos
Antes de comenzar a trabajar con el equipo debemos ver sus especificaciones técnicas, obtenidas del
catálogo de Siemens.
Tabla 1 Información técnica
FUENTE: https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF
Tensión de red y gamas de
potencia 1 AC 200V a 240V ∓ 10% 0.12kW a 3kW
3AC 200V a 240V ∓ 10% 0.12kW a 5.5kW
3 AC 380V a 480V ∓ 10% 0.37kW a 11kW
Frecuencia de red 47 a 63 Hz
Frecuencia de salida 0 Hz a 650 Hz
Factor de potencia ≥ 0.95
Rendimiento del convertidor 96% a 97%
Capacidad de sobrecarga Corriente de sobrecarga 1.5 x la corriente de salida
asignada
(es decir, 150% de la capacidad de sobrecarga)
durante 60 s
Método de control Característica v/f lineal
Característica v/f cuadrática
Característica multipunto
FCC (regulación corriente-flujo)
Frecuencias de pulsación 16 kHz, 4 kHz, 2 kHz

32
Frecuencias fijas 7, parametrizables
Entradas digitales
3 entradas digitales parametrizables, con aislamiento
galvánico; seleccionable
PNP/NPN
Entrada analógica 1, para consigna o regulador PI (0V a 10V)
Salida analógica
1 parametrizable (0 mA a 20
mA)
Interfaces serie
RS-485, opcional RS-232

33
Longitudes de los cables de motor:
Sin bobina de salida
Máx. 50m (con apantallamiento)
Con bobina de salida
Máx. 100m (sin
apantallamiento)
Frenado
Por inyección de corriente continua, combinado
Grado de protección
IP20
Temperatura de funcionamiento -10ºC a +50ºC
Altitud de instalación
Hasta 1000m sobre el nivel del mar sin reducción
de potencia
34
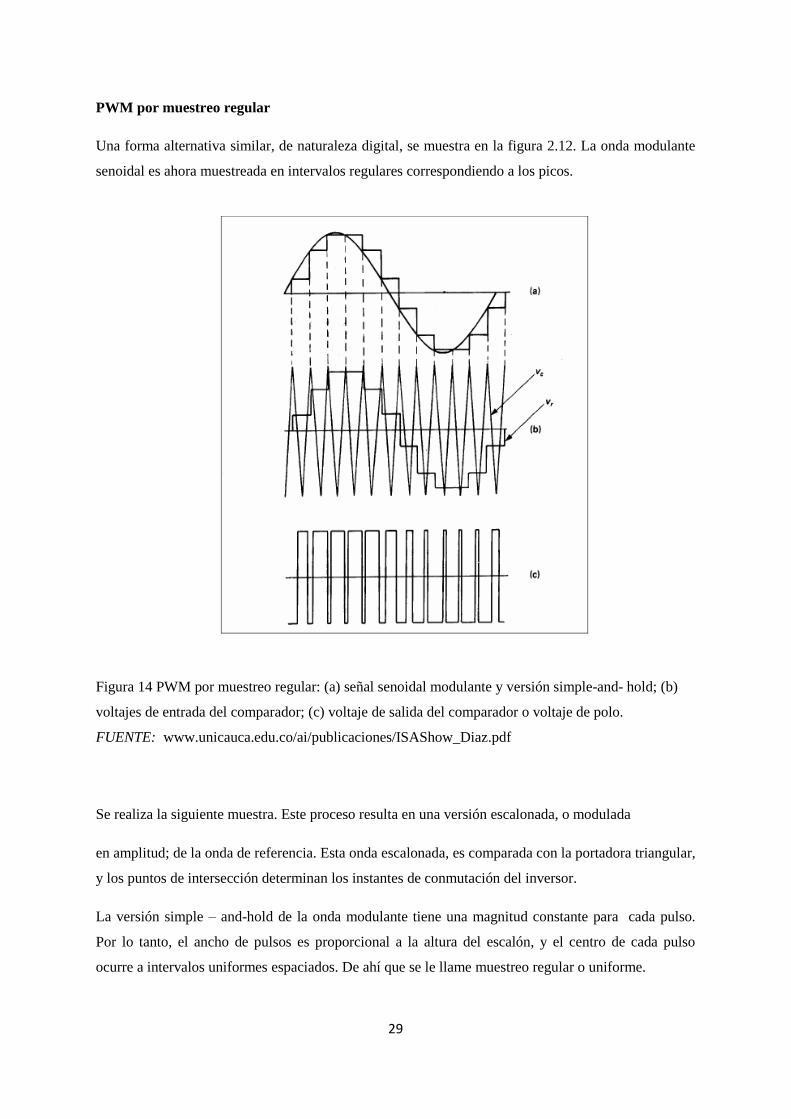
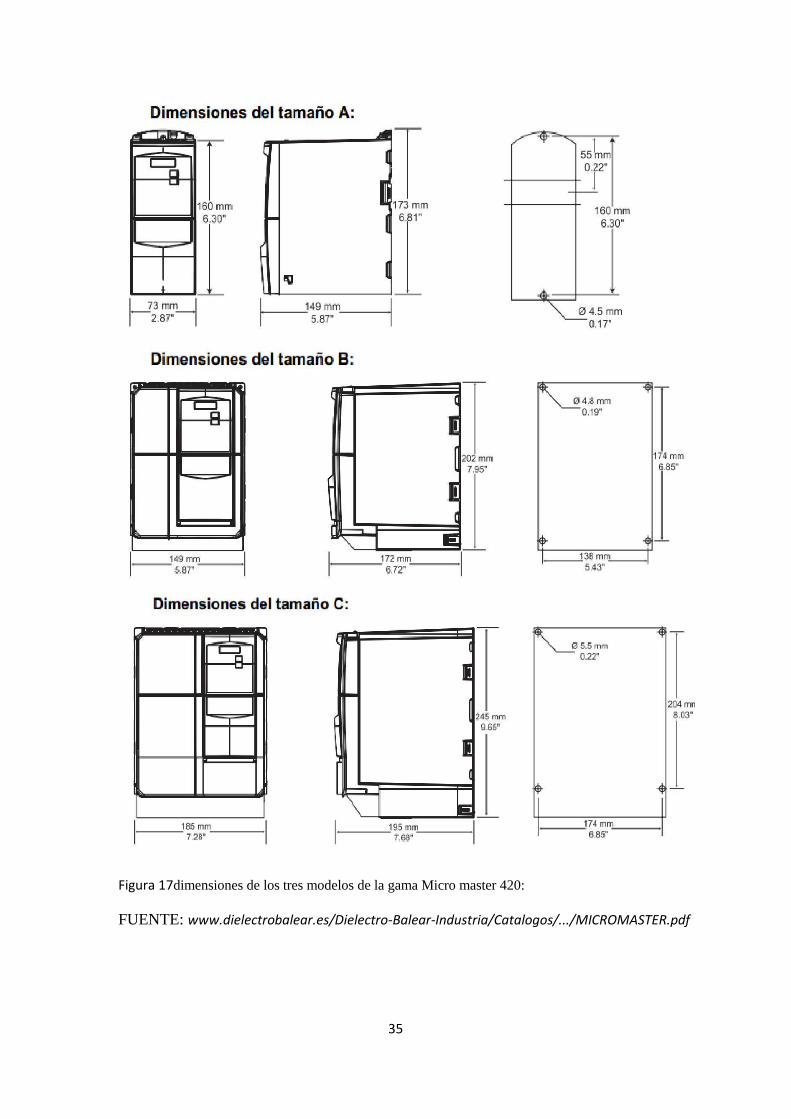
Dimensiones
En las siguientes imágenes podemos ver las dimensiones de los tres modelos de la gama Micro master
420:
Figura16Esquema de bloques Micromaster420.
FUENTE: www.dielectrobalear.es/Dielectro-Balear-Industria/Catalogos/.../MICROMASTER.pdf
35
Figura 17dimensiones de los tres modelos de la gama Micro master 420:
FUENTE: www.dielectrobalear.es/Dielectro-Balear-Industria/Catalogos/.../MICROMASTER.pdf

36
Además debemos considerar la instalación eléctrica recomendada en la sección 3.3 a la hora de elegir
la zona donde situaremos los equipos, ya que debe haber espacio suficiente para poder trabajar
cómodamente con ellos”.
Bornes
Para poder acceder a los bornes de red y del motor debemos retirar la tapa trasera del variador. En la
parte inferior se encontrarán los bornes del motor y en la superior el resto.
Los bornes del motor serán:
Figura 19 Esquema de instalación típica
FUENTE: https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF
Figura 18. Bornes de red y alimentación del motor
FUENTE: https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF

37
Se identifican fácilmente las líneas de alimentación que llegan al variador (L1, L2 y L3) y las que
llegan luego al motor (U, V, W).
Panel AOP (Advanced Operator Panel)
MICROMASTER 420 (2000) dice: “El panel AOP permite la lectura de juegos de parámetros del
convertidor y la escritura en el mismo. Es el panel más completo que podemos usar”(p.93).
Entre sus características más avanzadas figuran las siguientes:
Visualización multilingüe de textos
Carga/Descarga de varios juegos de parámetros
Programable vía PC
Capacidad multipunto para controlar hasta 30 Micro master de la serie 4
FUENTE: https://support.industry.siemens.com/
Usa los mismos botones que el panel BOP pero nos ofrece una mejor interfaz visual.
Figura 20 Panel AOP (Advanced Operator Panel)

38
Módulos de comunicación
Para ciertas aplicaciones se requiere hacer uso de protocolos de comunicación que no están incluidos
de serie, para comunicar el variador con un PLC que lo controle.
Los tres módulos de comunicación más usados son:
Módulo Profibus
Nos proporciona una comunicación usando el bus de campo PROFIBUS. Podemos tener un acceso
cíclico a los parámetros del convertidor y a datos de proceso.
Soporta velocidades de 9,6 kBaud hasta 12 MBaud. El módulo PROFIBUS puede alimentarse
externamente con DC 24 V, con lo que permanece activo, incluso si el convertidor no está conectado
a la red(MICROMASTER 420 , 2004).
Figura 21 Módulo PROFIBUS, Cables y conector Profubus RS-485
FUENTE: https://support.industry.siemens.com

39
Módulo CANopen
MICROMASTER 420 (2000) dice: “Con el módulo de comunicación CAN open, el convertidor
puede conectarse en una red con el sistema de bus de campo CAN open, lo que permite controlarlo a
distancia”(p.19)
Permite una velocidad de transmisión de hasta 1Mbaud.
El módulo se conecta con el sistema de bus mediante un conector tipo sub-D de 9 polos.
Figura 22 Módulo CAN open
FUENTE: https://support.industry.siemens.com
Parámetros
MICROMASTER 420 (2000) dice que : “Usamos los parámetros del variador para su configuración y
uso. Existen dos tipos de parámetros, los que empiezan por ‘r’, que son solo de lectura, y el resto
empieza por ‘p’, los cuales podemos configurar y cambiar de valor”(p.48).
Los parámetros tienen varias características para describirlos:
Número de parámetro: Los números usados son de 4 dígitos del margen de 0000 a 9999.
Nombre del parámetro: Algunos nombres de parámetros incluyen los siguientes prefijos: BI, BO,
CI,CO.
BI: entrada binector, seleccionan la fuente de una señal binaria
BO: salida binector, conecta como una señal binaria
CI: entrada conector, selecciona la fuente de una señal analógica
CO: salida conector, el parámetro conecta como una salida analógica

40
EstC: Estado de servicio de los parámetros. Son posibles tres estados:
Servicio: C
Listo para la marcha: U
En marcha: T
Esto indica cuando se pueden cambiar los parámetros. Se pueden especificar uno, dos o los tres
estados.
Grupo-P: Indica el grupo funcional de un parámetro en particular. Sus posibles valores
son:COMMANDS, SETPOINT, ALWAYS, ALARMS, MOTOR…
Tipos de datos: Mostramos los tipos de datos que se utilizan en la siguiente tabla:
Tabla 2 Tipos de datos
NOTACIÓN SIGNIFICADO
U16 16-bit sin signo
U32 32-bit sin signo
I16 16-bit entero
I32 32-bit entero
Flotante Coma flotante
Unidades: Indica las unidades de medida aplicables a los valores de los parámetros.
Min: Indica el valor mínimo al que se puede ajustar el parámetro.
Def: Indica el valor por defecto, es decir, el valor ajustado si el usuario no especifica un
valordeterminado para el parámetro.
Máx: Indica el valor máximo al que se puede ajustar el parámetro.
Nivel: Indica el nivel de acceso de usuario. Hay cuatro niveles de acceso: Estándar, Ampliado,
Expertoy Servicio. El número de parámetros que aparece en cada grupo funcional depende del
nivel de acceso ajustado en el parámetro P0003 (nivel de acceso de usuario).

41
Figura 23 Ejemplo de parámetro del manual
FUENTE: https://support.industry.siemens.com/cs/attachments/.../aop
MICROMASTER 420 (2000) dice que : “Para la mayoría de las aplicaciones no es necesario
configurar la gran cantidad de parámetros de los que disponemos, basta con usar la opción de puesta
en servicio rápida (P0010 = 1) que incorpora el variador”(p.48).

42
Para realizar la puesta en servicio rápida se requieren los parámetros siguientes:
Tabla 3 Parámetros del variador puesta a punto
FUENTE: https://cache.industry.siemens.com/dl/files/476/19280476/att.../420_PLi_sp_0604.pdf
Al finalizar la puesta en servicio rápida con el parámetro P3900 = 1, ajustamos todos los
demás parámetros a sus valores por defecto.

43
A continuación se detalla el resto de bornes, con su significado y sus características:
Figura 24 Bornes del variador MM420
FUENTE: https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF
Formas de evitar interferencias electromagnéticas (EMI)
Estos variadores están diseñados para trabajar en entorno con grandes interferencias
electromagnéticas, aunque siempre es bueno seguir unas directrices para minimizar
Estas perturbaciones:
Figuran 25 Directrices de cableado
FUENTE:https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF

44
Asegurarse de conectar todos los aparatos del armario a tierra.
Conectar el equipo de control (PLC), unido al variador, al mismo punto de tierra.
Conectar la tierra de los motores controlados por el variador directamente a la conexión de
tierra (PE) del variador asociado.
Es preferible utilizar conductores planos, ya que tienen menor impedancia a altas frecuencias.
Terminar de forma limpia los extremos de los cables, asegurándose de que los hilos no
apantallados sean lo más cortos posibles.
Accesorios
Existen varios tipos de accesorios que facilitan el uso del Microaster 420 o nos proporcionan una
interfaz de comunicaciones diferente.
Panales frontales de operaciones
Panel SDP
Es el panel de operaciones más básico y se entrega como estándar con el variador.
MICROMASTER 420 (2000) dice: “ El panel se compone de dos leds que indican el estado
operativo del convertidor. Con el panel SDP el convertidor puede utilizarse con sus ajustes por
defecto que permiten cubrir gran cantidad de aplicaciones”(p.92).
Figura 26 Panel SDP
FUENTE: FUENTE: https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF
Además los leds pueden indicar diferentes estados de alarma o fallo. Estos estados se describen por
el parpadeo de los leds y están recogidos en la siguiente tabla:

45
Tabla 4 Estado del variador indicado por los LEDS del panel SDP
FUENTE: FUENTE: https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF
LEDs
DEFINICIÓN DE ESTADO
VERDE AMARILLO
OFF OFF Red no presente
OFF ON Fallo en convertidor
ON OFF Convertidor en marcha
ON ON Preparado para funcionar, standby
OFF R1 parpadea Fallo sobre corriente
R1 parpadea OFF Fallo sobretensión
R1 parpadea ON Fallo sobre temperatura del motor
ON R1 parpadea Fallo sobre temperatura variador
R1 parpadea
Alarma límite corriente (ambos LEDs parpadean
al mismo tiempo)
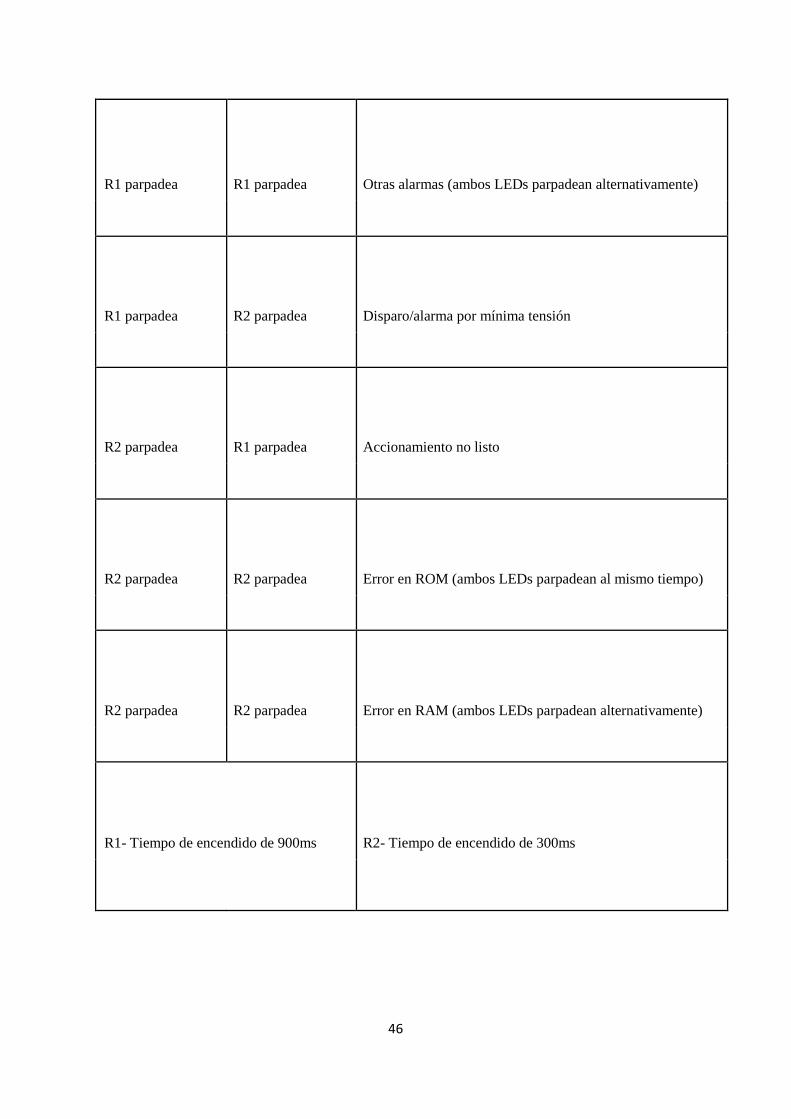
46
R1 parpadea R1 parpadea Otras alarmas (ambos LEDs parpadean alternativamente)
R1 parpadea R2 parpadea Disparo/alarma por mínima tensión
R2 parpadea R1 parpadea Accionamiento no listo
R2 parpadea R2 parpadea Error en ROM (ambos LEDs parpadean al mismo tiempo)
R2 parpadea R2 parpadea Error en RAM (ambos LEDs parpadean alternativamente)
R1- Tiempo de encendido de 900ms R2- Tiempo de encendido de 300ms
47
Panel BOP (Basic Operator Panel)
MICROMASTER 420 (2000) dice: “El BOP permite ajustar los parámetros de manera
personalizada. Los valores y las unidades se visualizan en un display de 5 dígitos”(p.93).
Figura 27Panel BOP
FUENTE: FUENTE: https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF
El panel BOP puede utilizarse para configurar diversos convertidores Micro master 420. Es decir,
no es necesario tener un panel BOP separado para cada convertidor.

48
DEFINICIÓN DE TÉRMINOS BÁSICOS
Autotransformador.- Transformador de un solo arrollamiento con dos conexiones, de entrada y
salida.
Bobinado.- Conjunto de bobinas que forman parte de un circuito eléctrico.
Bornes.- Cada uno de los terminales metálicos de ciertas máquinas y aparatos eléctricos, destinados a
la conexión de hilos conductores.
Control.- Regulación, manual o automática, sobre un sistema.
Frecuencia.- Número de veces que se repite un proceso periódico por unidad de tiempo.
LED.- Diodo semiconductor que emite luz cuando se le aplica tensión.
Motores.- Máquina destinada a producir movimiento a expensas de otra fuente de energía.
Parámetros.- Dato o factor que se toma como necesario para analizar o valorar una situación.
PWM.- Modulación de Ancho de Pulsos.
Rectificador.- Aparato que transforma una corriente alterna en corriente continua.
Regulación.- Acción y efecto de regular.
Rotor.- Parte giratoria de una máquina eléctrica o de una turbina.
Trifásico.- Dicho de una corriente eléctrica: Compuesta por tres corrientes eléctricas alternas iguales,
desfasadas entre sí en un tercio de período.
Variador.- Permiten controlar la velocidad tanto de motores.
Velocidad.- Magnitud física que expresa el espacio recorrido por un móvil en la unidad de tiempo, y
cuya unidad en el sistema internacional es el metro por segundo (m/s).
Voltaje.- Cantidad de voltios que actúan en un aparato o sistema eléctrico.

49
CAPÍTULO III
CONCLUSIONES Y RECOMENDACIONES
CONCLUSIONES
La investigación realizada a los variadores, permitió entender su composición, estructura y
funcionamiento, en sus diferentes etapas para llevar a cabo la variación de la frecuencia y su
velocidad.
Se determinó que el método más eficaz para controlar la velocidad de un motor eléctrico es por
medio de un variador electrónico de frecuencia.
Se realizó la operación del variador y a través de su uso, operar los diferentes tipos de control que
dispone en su programación, para el accionamiento.
Se conoció las distintas formas de puestas en marcha del variador conociendo cada uno de sus
parámetros que existen en su programación.
RECOMENDACIONES
Manipular el equipo por personal familiarizado con la puesta en servicio y operación para asegurar el
funcionamiento correcto del equipo.
Esperar cinco minutos para permitir que se descarguen los condensadores antes de comenzar
cualquier trabajo de instalación en el equipo.
Tomar en cuenta que la conexión de los cables de red, del motor y de mando o control deberá
realizarse de la forma correcta a fin de evitar que interferencias de tipo inductivo y capacitivo
afecten al correcto funcionamiento del convertidor.
Montar en posición frontal-vertical para asegurar la refrigeración necesaria asegurando que las aletas
de enfriamiento del convertidor no estén tapadas ni obstruidas.
Observar que el convertidor esté siempre a tierra. Si el convertidor no está puesto a tierra
correctamente se puede destruir el convertidor, así como producirse altas tensiones peligrosas para
las personas.
50
ANEXOS

51
Bibliografías:
Collins Spanish Dictionary–2005 Complete and Unabridged
Graling 2004, catarina.udlap.mx/u_dl_a/tales/documentos/lep/salvatori_a_m/capitulo3.
Gutiérrez 2011, dspace.espoch.edu.ec
Heinrich Gerling. 1964 Alrededor de las máquinas - herramientas,
José Garrigos, 2011 www.monografias.com › Ingenieria
Mansilla 2011, docplayer.es/41472125-Arrancadores-y-variadores-de-velocidad-electronicos.
MICROMASTER 420 (2000) https://support.industry.siemens.com/
MOTORES ELÉCTRICOS, Tecnología eléctrica, Hernández Juan Luis
Piñero 2015, bibing.us.es/proyectos/abreproy/90201/fichero/proyecto.
Salazar 2011, dspace.espoch.edu.ec
siemens , manuales tecnicos para instalacion de variadores de velocidad
Netgrafías:
http://pws.prserv.net/esinet.migcc/diccionarios/
https://es.wikipedia.org/wiki/Jaula_de_ardilla
www.apkmodgame.net/tag/-solucionado-contactor-y-relevo-termico-esquema-electrico-monofasico.
www.reypastor.org/departamentos/dtec/tec_indII/motor_jaula_ardilla/
www.schneider-electric.com.ar/documents/recursos/myce/capitulo04_1907

52
ANEXO 1
ROTOR JAULA DE ARFUENTE:
https://www.google.com.ec/search?q=MOTOR+DE+INDUCCION&biwDILLA
ANEXO 2
TIPOS DE MAQUINAS ASINCRONICAS O DE INDUCCION
FUENTE: https://www.google.com.ec/search?q=MOTOR+DE+INDUCCION&biw

53
ANEXO 3
PARTES DEL ESTATOR JAULA DE ARDILLA
FUENTE: https://www.google.com.ec/search?q=MOTOR+DE+INDUCCION&biw
ANEXO 4
ASPETOS CONSTRUCTIVOS: PLACA DE CARACTERISTICAS
FUENTE: https://www.google.com.ec/search?q=MOTOR+DE+INDUCCION&biw

54
ANEXO 5
PLACA DE BORNES CONEXIONES ESTRELLA TRIANGULO
FUENTE: https://www.google.com.ec/search?q=MOTOR+DE+INDUCCION&biw
ANEXO 6
PLANEL SDP COLOCADO
FUENTE: : https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF

55
ANEXO 7
ENTRADAS DIGITALES Y ANALOGICAS
FUENTE: : https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF
ANEXO 8
TERMINALES DE POTENCIA MICROMASTER 420
FUENTE: : https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF

56
ANEXO 9
SET PARA CONEXIÓN A PC MICROMASTER 42
FUENTE: : https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF
ANEXO 10
LED’S DE ESTADO MICROMASTER 42
FUENTE: : https://support.industry.siemens.com/cs/attachments/6515704/opspa.PDF


















