Variadores de Velocidad-6
25
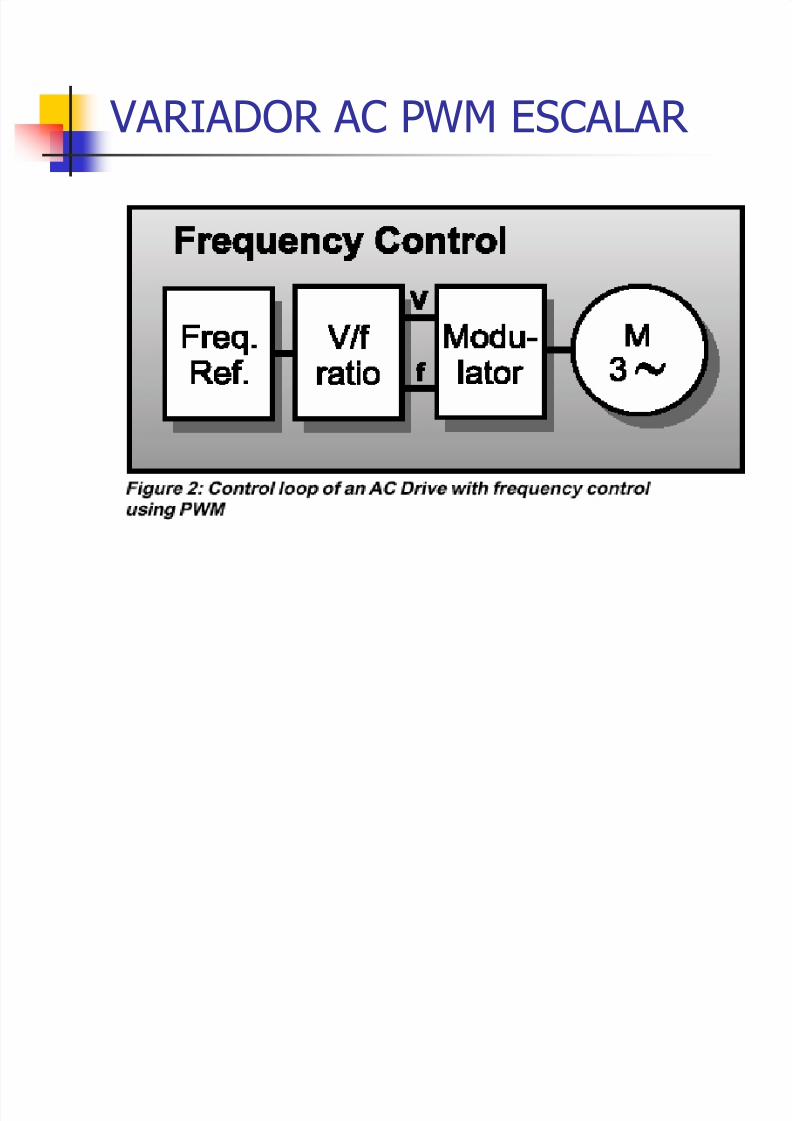
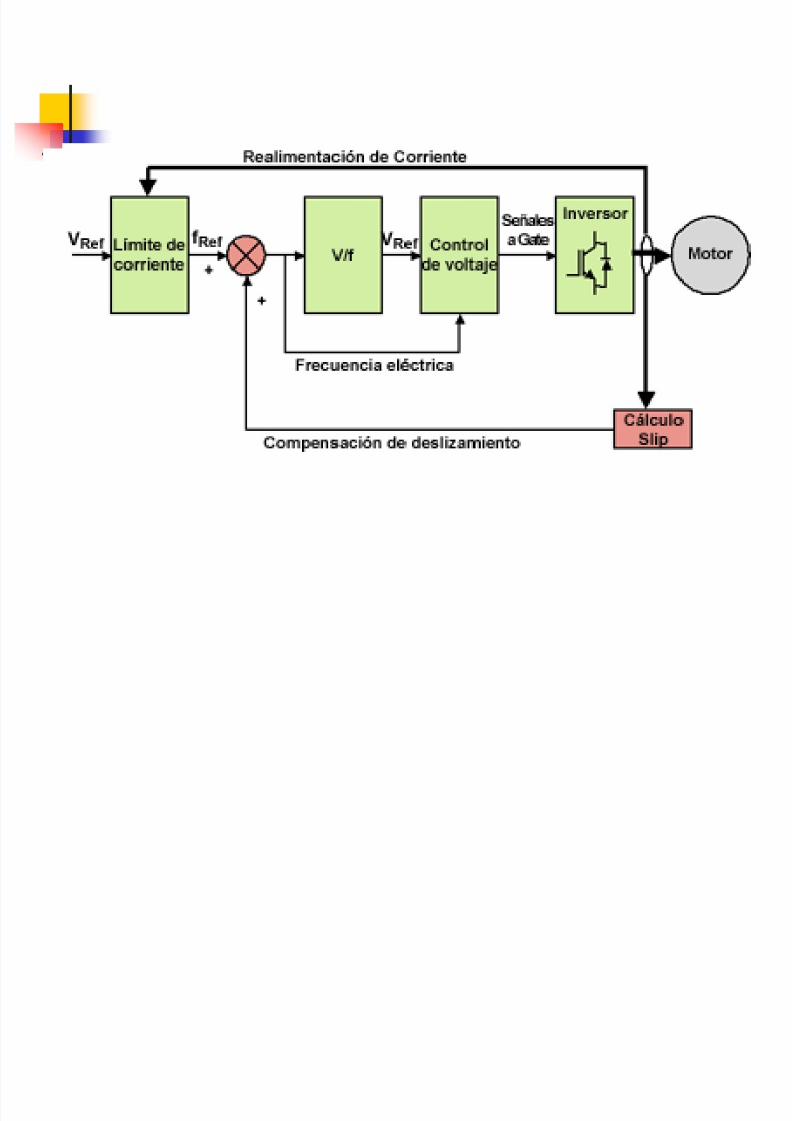
VARIADOR AC P WM ESCALAR
-
Upload
fsaul-lazaro-yaranga -
Category
Documents
-
view
220 -
download
0
Transcript of Variadores de Velocidad-6
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 1/25
VARIADOR AC PWM ESCALAR
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 2/25
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 3/25
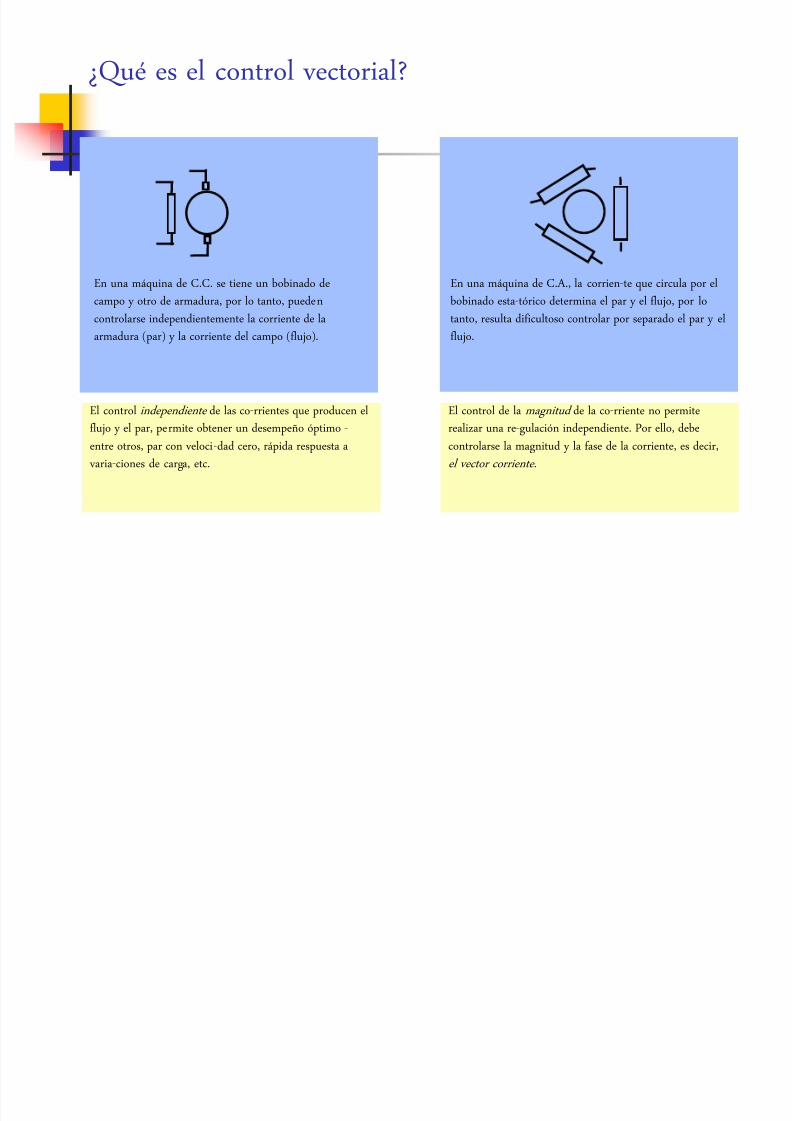
¿Qué es el control vectorial?
En una máquina de C.C. se tiene un bobinado de
campo y otro de armadura, por lo tanto, pueden
controlarse independientemente la corriente de la
armadura (par) y la corriente del campo (flujo).
En una máquina de C.A., la corrien-te que circula por el
bobinado esta-tórico determina el par y el flujo, por lo
tanto, resulta dificultoso controlar por separado el par y el
flujo.
El control de la magnitud de la co-rriente no permiterealizar una re-gulación independiente. Por ello, debe
controlarse la magnitud y la fase de la corriente, es decir,
el vector corriente.
El control independiente de las co-rrientes que producen elflujo y el par, permite obtener un desempeño óptimo -
entre otros, par con veloci-dad cero, rápida respuesta a
varia-ciones de carga, etc.
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 4/25
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 5/25
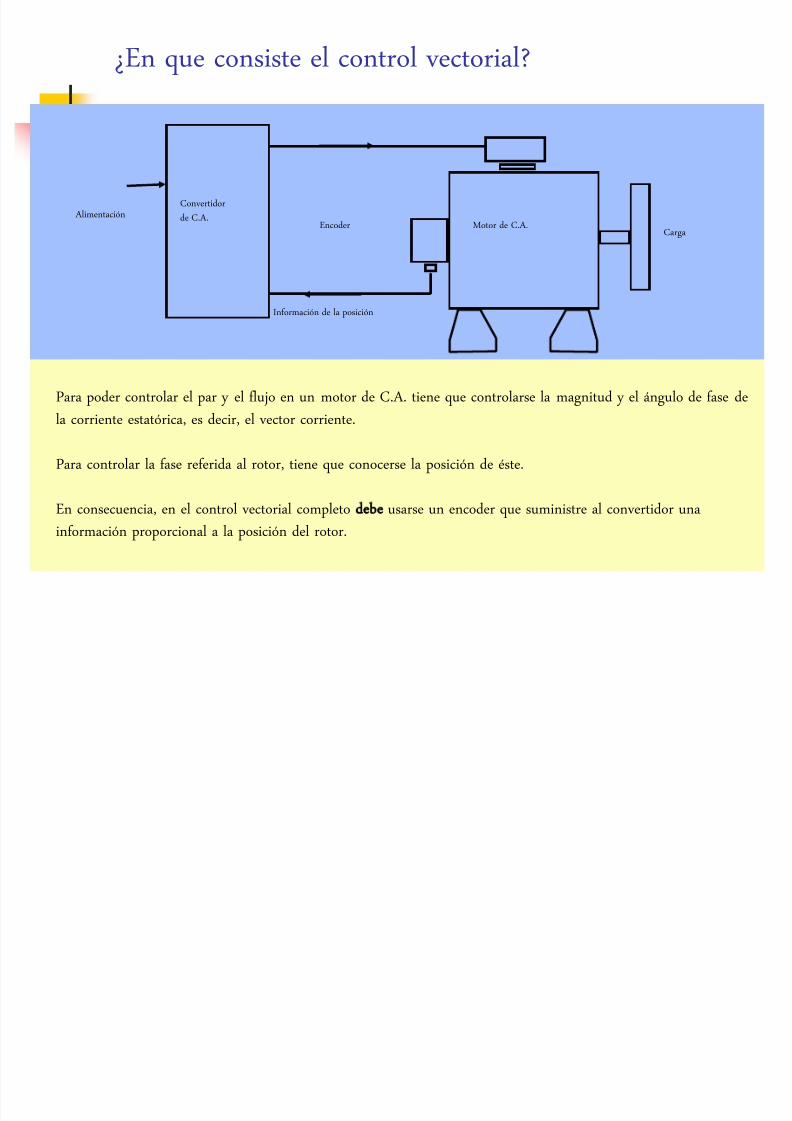
¿En que consiste el control vectorial?
Para poder controlar el par y el flujo en un motor de C.A. tiene que controlarse la magnitud y el ángulo de fase de
la corriente estatórica, es decir, el vector corriente.
Para controlar la fase referida al rotor, tiene que conocerse la posición de éste.
En consecuencia, en el control vectorial completo debe usarse un encoder que suministre al convertidor una
información proporcional a la posición del rotor.
Convertidor
de C.A.Motor de C.A.Encoder
Carga
Alimentación
Información de la posición
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 6/25
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 7/25
CONTROL VECTORIAL La idea del sistema de modulación vectorial
es la de controlar el flujo magnético delmotor directamente, obteniendo un variadormás eficiente y de mejor dinámica comparadocon uno del tipo senoidal
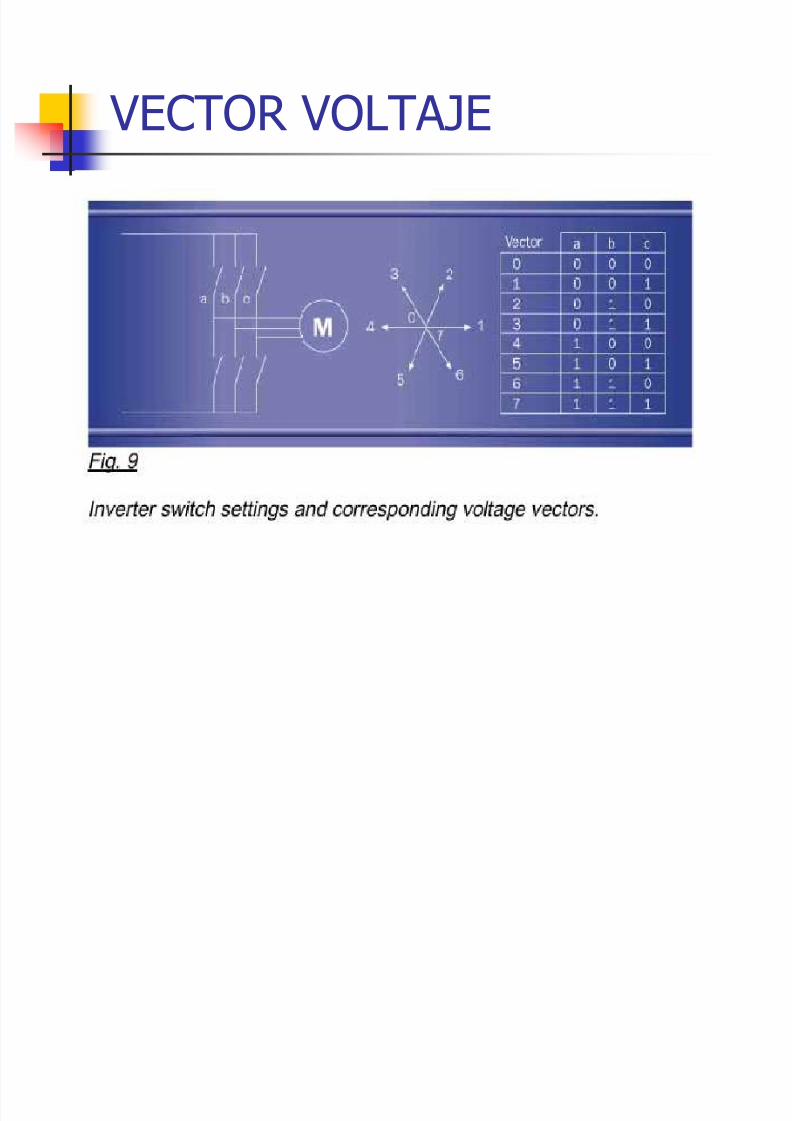
El principio puede ser descrito por una
representación vectorial del flujo magnético.Por medio de los seis contactos del inversorse pueden generar 8 vectores de voltaje, delos cuales 2 son nulos
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 8/25
VECTOR VOLTAJE
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 9/25
CONTROL VECTORIAL El vector flujo se puede colocar en cualquier dirección de
acuerdo a la posición de los contactos del inversor Idealmente el vector flujo debe describir una circunferencia
En la práctica la circunferencia se forma por medio de pequeñasetapas Dependiendo de la limitación de conmutación se puede obtener
cualquier patron entre el hexágono básico y una circunferencia La frecuencia es controlada aplicando los vectores nulos para
detener el desplazamiento del vector flujo El control vectorial se caracteriza por una alta eficiencia pero al
mismo tiempo limitado a bajas velocidades.
Está limitado a aplicaciones de baja dinámica
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 10/25
ORIENTACION DE CAMPO El control por orientación de campo puede definirse como un
control de torque por estimación del flujo magnético El flujo es calculado a partir de un modelo matemático del
motor y la corriente del estator o por integración de los voltajesde fase
En la práctica se han desarrollado varios modelos denominados:Control Vectorial de Flujo, Control Vectorial de Campo, Control Vectorial, etc.
La diferencia entre los distintos métodos radica en la manera de
la estimación del flujo o cómo es controlada la corriente o elflujo
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 11/25
METODO INDIRECTO La mayoría de los métodos de orientación de campo antiguos
pueden ser considerados como indirectos ya que controlan lacorriente para obtener el flujo deseado.
Parámetros de retroalimentación son la corriente del motor y lavelocidad o posición del rotor
Los métodos indirectos de control de orientación de campoofrecen buenas características de torque y velocidad empleandocomplejos cálculos en tiempo real
Factores limitantes son la susceptibilidad a la variación de los
parámetros del motor y retardo para el control de flujo Tiempos típicos de respuesta son 10 a 20ms
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 12/25
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 13/25
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 14/25
¿En que consiste el control vectorial sin s nsor ?
En el control vectorial sin sensor el convertidor calcula la posición del rotor por medio de modelos
matemáticos.
Para poder hacer esto el convertidor debe:
• Monitorear con gran exactitud la corriente y tensión de salida.
• Conocer los parámetros del motor (Resistencia rotórica y estatórica, reactancia de dispersión, etc.)
• Conocer la historia del motor; o sea, la carga previa, etc. para poder estimar la temperatura del
motor.
•
Ser capaz de realizar cálculos con gran rapidez.
A bajas velocidades resulta muy difícil calcular el desempeño del motor y deducir la posición del
rotor.

7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 15/25
¿Cuáles son las ventajas del control vectorial sin sensor
• Excelente control de velocidad en lazo abierto sin compensación
del deslizamiento.
• Elevado par a baja velocidad sin excesiva sobretensión.
• Menores pérdidas, mayor eficiencia.
• Mejor desempeño dinámico - mayor respuesta a variaciones
bruscas de carga.
• Operación estable para grandes motores.
• Mejor desempeño en el límite de la corriente con control de
deslizamiento mejorado.
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 16/25
OPERACIÓN SIN SENSOR
En la mayoría de aplicaciones es preferibleoperar el motor sin ningún sensor en el eje
Recientemente se ha logrado mejorar laperformance de operaciones sin sensor abajas velocidades y 0 rpm
Los factores que contribuyen a esto son losnuevas técnicas de estimación de velocidad yal desarrollo de los métodos directos decontrol de orientación de campo
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 17/25
CONTROL DIRECTO DE FLUJO Y TORQUE El control directo de torque y flujo es básicamente un
control de orientación de campo En lugar de controlar el flujo y el torque a través de
la corriente, se tiene una mayor aproximación a partirque cada posición de los contactos del inversor estádirectamente relacionado con un estadoelectromagnético del motor
Un cambio instantáneo del flujo o torque se logra poruna posición determinada del vector voltaje
Una parte esencial de este método es el modelo delmotor que estime el torque y flujo actual
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 18/25
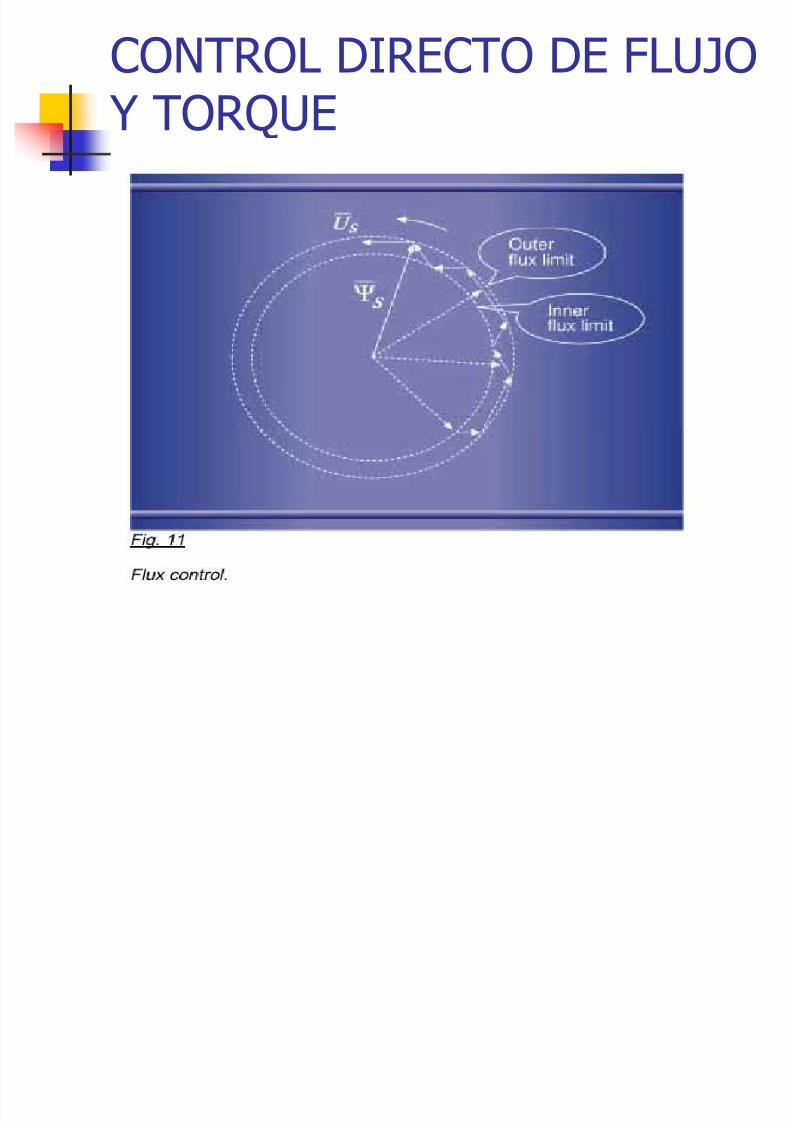
CONTROL DIRECTO DE FLUJO Y TORQUE Comparando el valor actual con el valor de referencia se obtiene
un lazo cerrado de control de flujo y torque El vector voltaje se selecciona para mantener el vector flujo
dentro de dos circunferencias límites. Las circunferenciaslímites representan el flujo de referencia y la histéresis
Solamente hay un flujo físicamente presente en el motor, sinembargo, puede ser representado por dos flujos: el flujo delestator y el flujo del rotor
El torque es creado por la interacción de estos dos flujos. Variando el vector del flujo del estator por medio del vector
voltaje el torque variará rápidamente Cuando el torque es mayor que el de referencia se aplica el
vector de voltaje nulo
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 19/25
CONTROL DIRECTO DE FLUJO Y TORQUE

7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 20/25
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 21/25
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 22/25
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 23/25
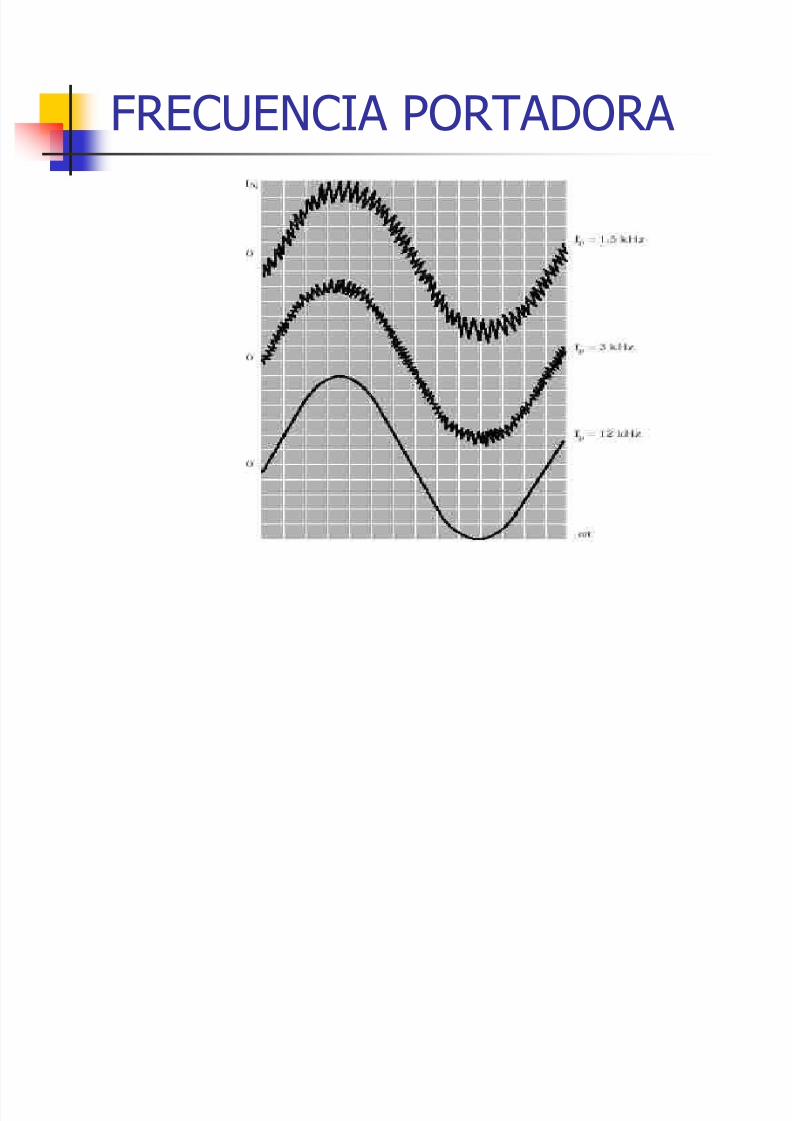
FRECUENCIA PORTADORA
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 24/25
7/21/2019 Variadores de Velocidad-6
http://slidepdf.com/reader/full/variadores-de-velocidad-6 25/25
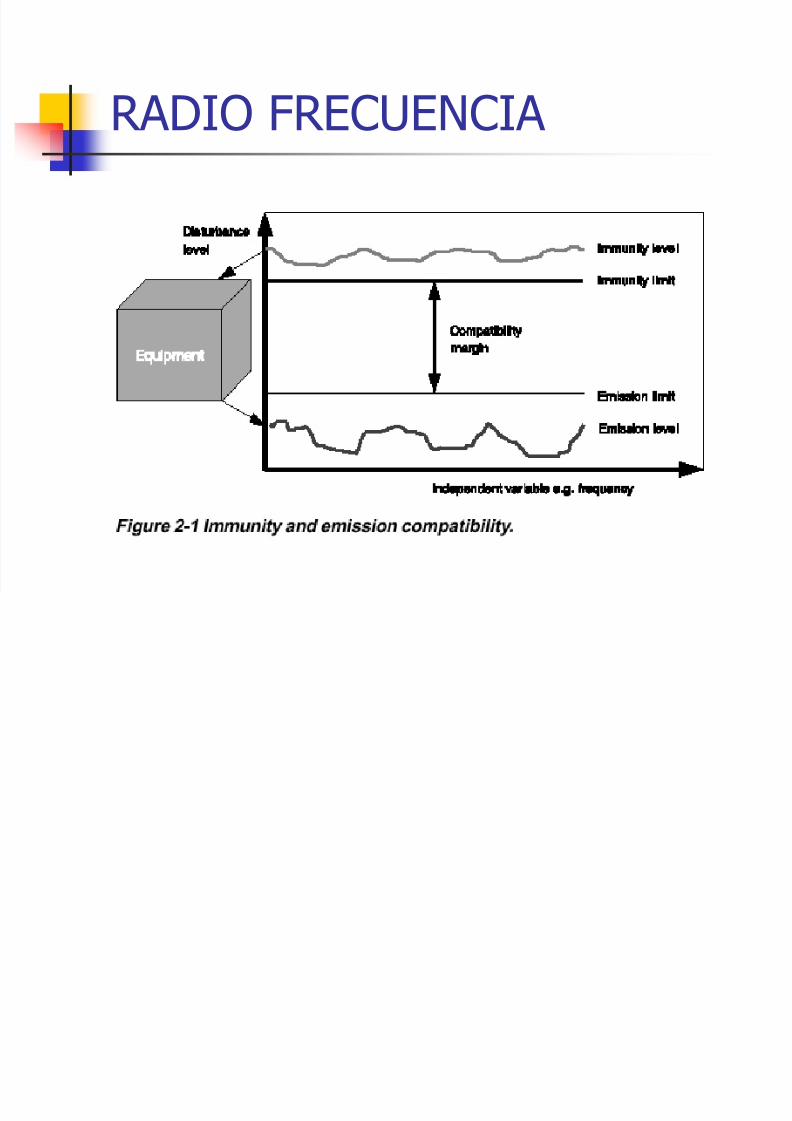
RADIO FRECUENCIA