Vibraciones y Ondas
22
Vibraciones Mecánicas y Dinámica de Máquinas Notas de Clase - 1 - Vibraciones y Ondas Contenido Vibraciones y Ondas ............................................................................................................1 1 Introducción ................................................................................................................2 2 Vibraciones armónicas ................................................................................................2 2.1 Uso de matemática compleja...................................................................................5 2.2 Ecuaciones de Euler ................................................................................................5 2.3 Superposición de ondas de la misma frecuencia .....................................................6 2.4 Superposición de ondas de distinta frecuencia ........................................................7 2.5 Modulación de amplitud..........................................................................................9 2.6 Modulación de frecuencia .......................................................................................9 3 Serie de Fourier, Transformada de Fourier. ..............................................................13 3.1 Serie de Fourier .....................................................................................................13 3.2 Forma compleja de la Serie de Fourier .................................................................14 3.3 Espectros de frecuencia .........................................................................................15 3.4 Espectros en señales impulsivas............................................................................15 3.5 Transformada Discreta de Fourier.........................................................................16 4 Ecuación de la onda ..................................................................................................17 4.1 Velocidades de la onda ..........................................................................................18 5 Clasificación de los sistemas oscilantes ....................................................................20 5.1 Clasificación según el número de grados de libertad ............................................20 5.2 Clasificación según el carácter de la ecuación diferencial asociada .....................21 5.3 Clasificación según la fuente generadora de las vibraciones ................................21
description
Fundamentos básicos de ondas y vibraciones mecánicas.
Transcript of Vibraciones y Ondas

Vibraciones Mecánicas y Dinámica de Máquinas Notas de Clase - 1 -
Vibraciones y Ondas
Contenido
Vibraciones y Ondas ............................................................................................................ 1
1 Introducción ................................................................................................................ 2
2 Vibraciones armónicas ................................................................................................ 2
2.1 Uso de matemática compleja ................................................................................... 5
2.2 Ecuaciones de Euler ................................................................................................ 5
2.3 Superposición de ondas de la misma frecuencia ..................................................... 6
2.4 Superposición de ondas de distinta frecuencia ........................................................ 7
2.5 Modulación de amplitud .......................................................................................... 9
2.6 Modulación de frecuencia ....................................................................................... 9
3 Serie de Fourier, Transformada de Fourier. .............................................................. 13
3.1 Serie de Fourier ..................................................................................................... 13
3.2 Forma compleja de la Serie de Fourier ................................................................. 14
3.3 Espectros de frecuencia ......................................................................................... 15
3.4 Espectros en señales impulsivas ............................................................................ 15
3.5 Transformada Discreta de Fourier ......................................................................... 16
4 Ecuación de la onda .................................................................................................. 17
4.1 Velocidades de la onda .......................................................................................... 18
5 Clasificación de los sistemas oscilantes .................................................................... 20
5.1 Clasificación según el número de grados de libertad ............................................ 20
5.2 Clasificación según el carácter de la ecuación diferencial asociada ..................... 21
5.3 Clasificación según la fuente generadora de las vibraciones ................................ 21
- 2 -
1 Introducción
Una Vibración es un fenómeno físico que posee un esquema de movimiento o desplazamiento que se repite una y otra vez, asociado a la idea de una onda o perturbación que se propaga.
Se transmite una propiedad de un lugar a otro a través de un medio, pero el medio NO se transporta. Se transmite información – energía.
Característica esencial: Periodicidad
Las vibraciones tienen en general formas (historias en el tiempo) variadas, dentro de ellas cobra gran importancia el estudio de las vibraciones armónicas.
2 Vibraciones armónicas
¿Por qué estudiamos las vibraciones armónicas?
Están presentes en una gran cantidad de sistemas mecánicos
Razón matemática: Serie de Fourier – Serie del Año 1807
Movimiento Armónico Simple (M.A.S.)
magnitud
tiempo

Vibraciones Mecánicas y Dinámica de Máquinas Notas de Clase - 3 -
Frecuencia [Hz] 1fT
= (1)
Frecuencia circular [rad/s] 22 fTπω π= = (2)
00sin( ) sin ( )x A t A t ϕω ϕ ω
ω= + = + (3)
derivando 0cos( )v A tω ω ϕ= + (4)
( )2
2 2 2 2 20(3) (4) sin ( ) cos ( )o
vx A t t Aω ϕ ω ϕω + + = + + + =
(5)
0(3) / (4) atan xtvωω ϕ + =
(6)
t
A+
A−
T
0ϕω

- 4 -
Para t=0
2
2 200
vx Aω
+ =
(7)
00
0
atan xvωϕ
=
(8)
Representación mediante un vector rotatorio
0sin( ) utiliza el plano de proyección verticalx A tω ϕ= + (9)
haciendo
0 2πϕ α= + (10)
teniendo en cuenta que
cos sin( )2πθ θ= + (11)
queda
cos( ) utiliza el plano de proyección horizontalx A tω α= + (12)
tω
0ϕ Plano de proyección horizontal
Plano de proyección vertical
Vibraciones Mecánicas y Dinámica de Máquinas Notas de Clase - 5 -
2.1 Uso de matemática compleja
cosx r θ= (13)
siny r θ= (14)
En el plano complejo, la posición de P queda expresada como:
donde , son versoresr x i y j i j= +
(15)
Haciendo (número complejo)j i=
r x i y= + (16)
Esta ecuación (compleja y no vectorial) contiene la información de fase iy , donde i se puede entender como un operador de rotación 90º antihorario, por lo que
2 01 (rotación 180 )i = − (17)
finalmente (véase Ecuaciones de Euler)
(cos sin ) ir r i re θθ θ= + = (18)
2.2 Ecuaciones de Euler
Recordando los desarrollos en serie del sinθ y cosθ son
( ) ( ) ( ) ( ) ( )
3 5 2 4
2 3 4 5
2 3 4 5
sin ... cos 1 ...3! 5! 2! 4!
resulta cos sin 1 ...2! 3! 4! 5!
cos sin 1 ...2! 3! 4! 5!
i ii i
i i i ii i
θ θ θ θθ θ θ
θ θ θ θθ θ θ
θ θ θ θθ θ θ
= − + − = − + −
+ = + − − + +
+ = + + + + +
(19)
Y siendo el desarrollo en serie de eθ
2 3 4
12! 3! 4!
eθ θ θ θθ= + + + + (20)
queda
cos sincos sin
i
i
e ie i
θ
θ
θ θ
θ θ−
= +
= − (21)
y
θr
P
x X
Y

- 6 -
2.3 Superposición de ondas de la misma frecuencia
1 21 2 1 2
( ) ( )i t i tz z z A e A eω ϕ ω ϕ+ += + = + (22)
o bien
1 21 2( )i ii tz e A e A eϕ ϕω= + (23)
que se interpreta como que la suma es un vector rotante, que resulta de la suma de 1A rotado 1ϕ con 2A rotado 2ϕ . Teniendo en cuenta que multiplicar por ie θ equivale a rotar en
un ángulo θ , se tiene que multiplicar por i te ω es hacer rotar al vector con una velocidad angular ω .
A1A
2A
2 1ϕ ϕ−
1ϕ
La ec. (22) que puede ser escrita como:
1 2 11 2
( ) ( )( )i t iz e A A eω ϕ ϕ ϕ+ −= + (24)
De esta manera es posible interpretar a la ecuación (24) y a la última figura, como que la suma es la proyección sobre el eje real (horizontal) de una amplitud, que es la resultante de la suma de 1A con el vector 2A , este último rotado el ángulo 2 1ϕ ϕ− relativo al primero. Finalmente esta amplitud es rotada un ángulo 1ϕ y gira con una frecuencia angular ω .
Note: la frecuencia se conserva, amplitud y fase de la suma deben ser calculadas.

Vibraciones Mecánicas y Dinámica de Máquinas Notas de Clase - 7 -
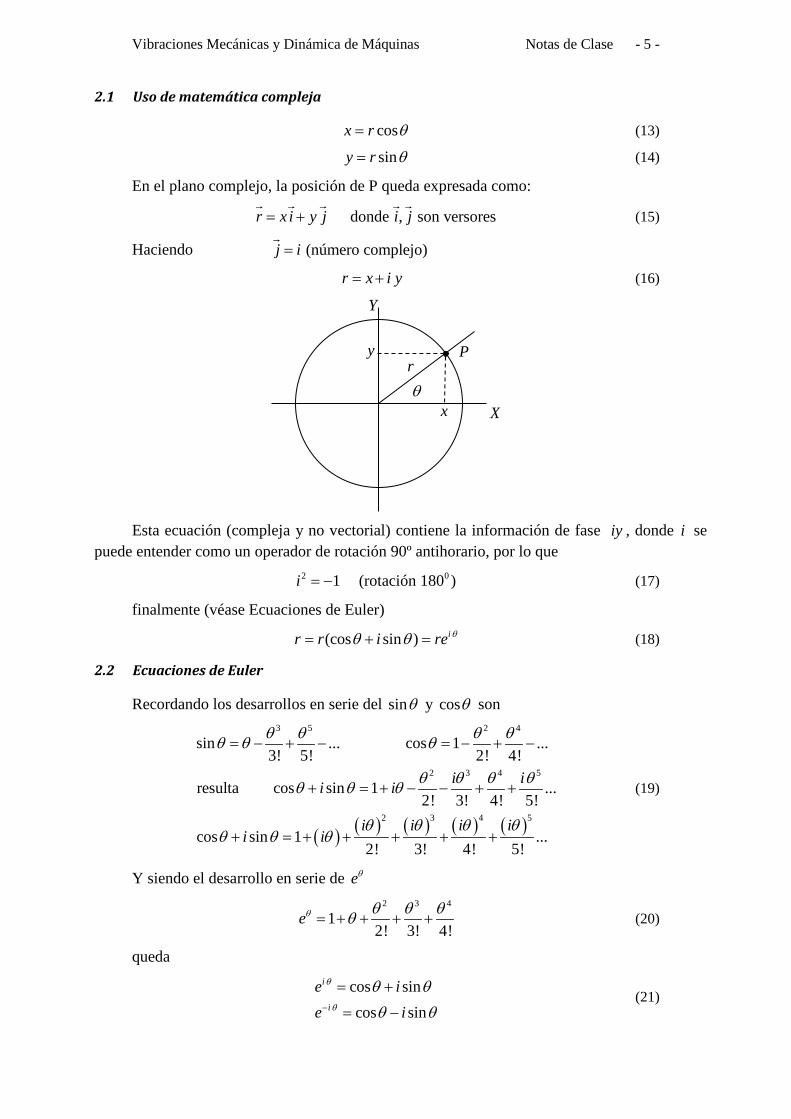
2.4 Superposición de ondas de distinta frecuencia
1 1 1 2 2 2cos , cosx A t x A tω ω= = (25)
Por simplicidad suponemos
1 2A A A= =
por lo que
1 2 1 2(cos cos )x x x A t tω ω= + = + (26)
Suponiendo que
1 1 2 2 1 2donde y enterosn T n T n n= (27)
y recordando que
cos( ) cos cos sin sincos( ) cos cos sin sin
θ ϕ θ ϕ θ ϕθ ϕ θ ϕ θ ϕ+ = −− = +
(28)
sumando m.a.m
cos( ) cos( ) 2cos cosθ ϕ θ ϕ θ ϕ+ + − = (29)
haciendo
1
2
tt
ω θ ϕω θ ϕ
= += −
Teniendo en cuenta la ec. (29) la ec. (26) queda
( )( )
1 2 1 2
cos( ) cos 2 cos cos
2 cos cos2 2
x A A
x A t t
θ ϕ θ ϕ θ ϕ
ω ω ω ω
= + + − =
+ − =
(30)
La superposición de ondas de distinta frecuencia resulta entonces en una señal producto de dos señales armónicas: una de frecuencia promedio de las frecuencias intervinientes y otra de frecuencia mitad de la diferencia de estas frecuencias. Esto origina el fenómeno denominado “batido” de ondas cuando las frecuencias intervinientes son próximas entre sí, generando una oscilación de batido, cuya frecuencia se define como el doble de la frecuencia de cada una de
las envolventes superior e inferior, esto es el doble de la frecuencia asociada 1 2
2ω ω− en la ec.
(30), o sea 1 2( )ω ω− . Una forma de interpretar el resultado es que la onda de frecuencia media (portadora, carrier) tiene una amplitud “modulada” por la frecuencia de batido, véase fig. siguiente. Véase además Vibraciones, Rao, apartado 3.3.2.
- 8 -
2.5
00.
51
1.5
22.
53
3.5
4-2
-1.5-1
-0.50
0.51
1.52
tiem
po
amplitud
Sum
a de
señ
ales
de d
istin
ta fr
ecue
ncia
co
mp1
com
p2su
ma

Vibraciones Mecánicas y Dinámica de Máquinas Notas de Clase - 9 -
2.5 Modulación de amplitud
Una onda cuya amplitud es modulada por una función armónica puede ser representada como
cos( ) ; cos( )c my A t A a b tω ω= = + (31)
donde a representa la amplitud de la señal original (sin modular), portadora o carrier, con frecuencia cω . La amplitud A resulta modulada por una señal armónica modulante de amplitud b y frecuencia mω Utilizando la misma relación trigonométrica del apartado anterior, ec. (29) , queda que
[ ]cos( ) cos( ) cos( )2c c m c mby a t t tω ω ω ω ω= + + + − (32)
Esto significa que la modulación de la amplitud introdujo dos nuevas frecuencias: c mω ω+ y c mω ω− , conocidas como tonos combinados o bandas laterales
La ec. (31) puede también ser escrita como
( )1 cos( ) cos( )m m cy a i t tω ω= + (33)
donde /mi b a= representa el índice de modulación, es decir la relación entre la amplitud de la onda modulante a la de la portadora.
La modulación de amplitud (AM) de una frecuencia portadora es una forma común de transmisión de radio. En el ámbito de las vibraciones mecánicas veremos a la modulación de amplitud asociada a la aparición de bandas laterales en los espectros medidos en máquinas.
2.6 Modulación de frecuencia
En este caso la frecuencia cω de una señal portadora ( ) cos( )c c cy t A tω= es modulada por medio de una función ( )mx t . Como la frecuencia es variable y llamando a la frecuencia instantánea ( )tω resulta que la fase de la señal puede ser obtenida integrando la frecuencia instantánea mediante una variable temporal τ . La señal modulada resulta entonces como
( )0( ) cos ( )
t
cy t A dω τ τ= ∫ (34)
Además resulta que la frecuencia instantánea es la frecuencia portadora más una variación temporal debida a la función ( )mx t
( ) ( )c mt x tω ω ω= + ∆ (35)
donde ω∆ representa la máxima desviación de frecuencia a partir de la portadora en alguna dirección y asumiendo que ( )mx t varía entre -1 y 1. La ec.(34) es escrita entonces como
( )( )0( ) cos ( )
t
c c my t A t x dω ω τ τ= + ∆ ∫ (36)
Si ( )mx τ es una señal armónica con frecuencia mω (supuesto ( ) sin( )m mx τ ω τ= ) queda que la señal modulada ( )y t puede ser expresada en forma genérica y simplificada (sin rigurosidad en la fase)
- 10 -
( ) cos cos( )c c mm
y t A t tωω ωω
∆= +
(37)
donde fm
mωω∆
= es el índice de modulación.
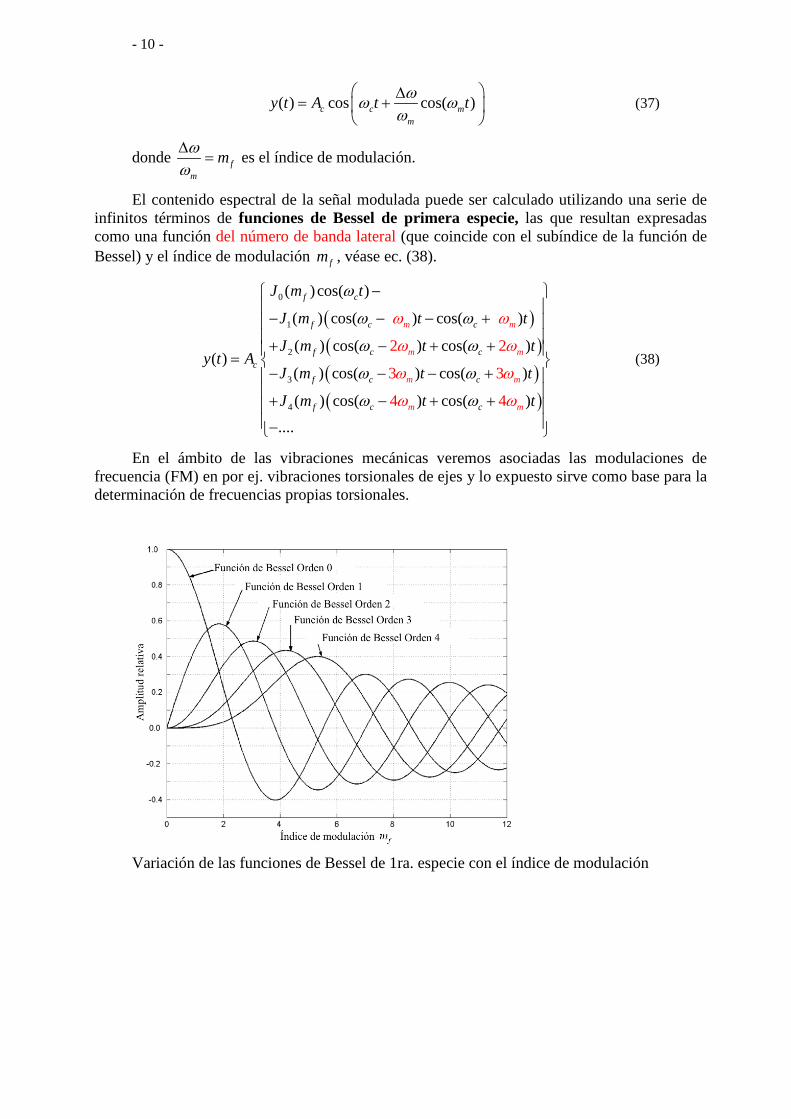
El contenido espectral de la señal modulada puede ser calculado utilizando una serie de infinitos términos de funciones de Bessel de primera especie, las que resultan expresadas como una función del número de banda lateral (que coincide con el subíndice de la función de Bessel) y el índice de modulación fm , véase ec. (38).
( )( )( )( )
0
1
2
3
4
( ) cos( )
( ) cos( ) cos( )
( ) cos( ) cos( )( )
( ) cos( ) cos(
2 2
)
( ) cos( )
3 3
4 4cos( )
....
f c
f c c
f c cc
f c c
m m
m m
m m
mf c c m
J m t
J m t t
J m t ty t A
J m t t
J m t t
ω ω
ω ω
ω ω
ω
ω ω
ω ω
ω ω
ω ω
ω ω
− − − − + + − + + = − − − + + − + + −
(38)
En el ámbito de las vibraciones mecánicas veremos asociadas las modulaciones de frecuencia (FM) en por ej. vibraciones torsionales de ejes y lo expuesto sirve como base para la determinación de frecuencias propias torsionales.
Variación de las funciones de Bessel de 1ra. especie con el índice de modulación

Vibraciones Mecánicas y Dinámica de Máquinas Notas de Clase - 11 -
Amplitud de las Funciones de Bessel de 1ra. especie

- 12 -
Ejemplos
En la figura de arriba se observan ejemplos de modulación en amplitud y frecuencia para
una frecuencia portadora de 30 Hz y una frecuencia modulante de 5 Hz.. Para el caso AM es 1 , 0.5a b= = por lo que la amplitud de las bandas laterales resulta 0.25 según ec.(32), esto
Vibraciones Mecánicas y Dinámica de Máquinas Notas de Clase - 13 -
puede verificarse en el espectro donde aparece la frecuencia portadora con amplitud unitaria y las bandas laterales con amplitud 0.25.
En el caso del ejemplo de FM se utilizó 2 (5)mω ω π∆ = = por lo que el índice de modulación resulta para este caso particular 1fm = . Entrando en la tabla de “Amplitud de las Funciones de Bessel de 1ra. especie” con el índice de modulación resulta que la frecuencia portadora tiene amplitud: 0.77 (orden 0), mientras que las bandas laterales 0.44 (orden 1, primera banda lateral), 0.11 (orden 2, segunda banda lateral), etc. Esto puede verificarse en el espectro de la figura.
Se consideran entonces aquí los casos más sencillos de modulación de amplitud y frecuencia mediante señales modulantes del tipo armónicas. Del análisis se puede concluir que:
1. En el primer caso (AM) la señal portadora mantiene su amplitud y adicionalmente se obtienen dos bandas laterales asociadas a las frecuencias portadora más y menos la frecuencia de modulación, esto es c mω ω± . La amplitud de las bandas laterales resulta la mitad de la amplitud de la modulante.
2. Para el caso de modulación en la frecuencia (FM) se obtienen infinitas bandas laterales distanciadas a partir de la frecuencia portadora una frecuencia igual a la frecuencia de modulación y sus múltiplos. Si bien las bandas son infinitas, desde el punto de vista práctico se consideran sólo las primeras, ya que sus amplitudes decaen fuertemente, de acuerdo con el incremento del orden de las funciones de Bessel, ver valores de la tabla adjunta.
3 Serie de Fourier, Transformada de Fourier.
3.1 Serie de Fourier
Suponemos una función periódica con período T.
( ) ( )x t x t n T= ± (39)
02frecuencia fundamental Tπω = (40)
0
0
: frecuencia fundamental : armónicas de orden superiornωω (41)
( ) ( ) ( )00 0
1cos sin
2 n nn
bx t n t n ta a ω ω=
∞= + + ∑ (42)
- 14 -
( ) ( )
( ) ( )
0
00
0 , 0,1, 2,
, 12
2 cos
,n ,2siT
n
T
na f t n t d
b f t n t dT
n
T
t
ntω
ω=
= =
=
∫
∫
(43)
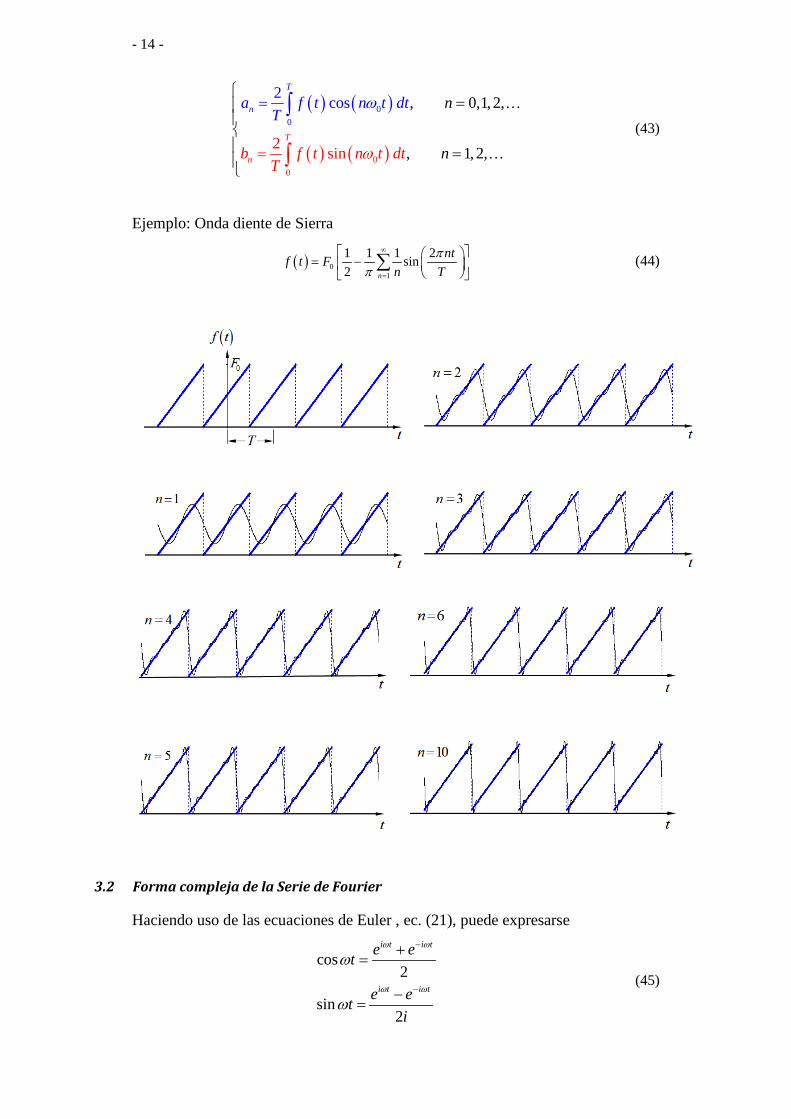
Ejemplo: Onda diente de Sierra
( ) 01
1 1 1 2sin2 n
ntf t Fn T
ππ
∞
=
= −
∑ (44)
3.2 Forma compleja de la Serie de Fourier
Haciendo uso de las ecuaciones de Euler , ec. (21), puede expresarse
cos
2
sin2
i t i t
i t i t
e et
e eti
ω ω
ω ω
ω
ω
−
−
+=
−=
(45)

Vibraciones Mecánicas y Dinámica de Máquinas Notas de Clase - 15 -
Por lo que la ec. (42) queda:
( )
0 0 0 0
0 0
0
1
0
2 2 2
2 2 2 2
in t in t in t in t
n
in t in tn nn
n
n
n
n
e e ea a
a
ex ti
ib ibe e a
bω ω ω ω
ω ω
− −
−
=
=
∞ + −= + + =
∞ = − + + =
∑
∑ (46)
( ) 0in tn
nx t c e ω
=−∞
∞ = ∑ (47)
definiendo los coeficientes complejos de la Serie de Fourier como
2 2 2 2n nn n
n na a
c cib ib
−= − = + (48)
A partir de las definiciones de an y bn de las ecs. (61) se puede obtener cn como
( ) 0
0
12 2
innn
tnTac fib e
Tt dtω−= − = ∫ (49)
3.3 Espectros de frecuencia
Las funciones armónicas componentes de una señal se denominan armónicos de orden n. Estos armónicos pueden graficarse en el dominio de la frecuencia, como un espectro de frecuencia, esto es, una serie de amplitudes correspondientes a cada frecuencia armónica. La expansión en Serie de Fourier por lo tanto posibilita describir cualquier función periódica en el dominio del tiempo o de la frecuencia (transformada en el dominio de la frecuencia).
3.4 Espectros en señales impulsivas
La descripción matemática anterior puede ser adaptada para señales no periódicas, por ejemplo señales impulsivas de corta duración. Formalmente puede suponerse que la función es todavía periódica, pero su período es muy largo, o tiende a infinito. Siendo el intervalo de frecuencias la inversa del período, resulta que el primero es muy pequeño o tiende a cero. Tenemos en este caso que la sumatoria de la serie tiende a una integral y los coeficientes de la serie se transforman en funciones continuas de la frecuencia, lo que es llamada la Transformada de Fourier. A partir de la ec. (49) se puede definir la transformada como
( ) 2( ) i f tX f x t e dt fπ∞
−
−∞
−∞= < < +∞∫ (50)
Donde la condición de existencia de ( )X f , llamada la transformada directa o espectro, es
( )x t dt∞
−∞
< ∞∫ (51)
Si se conoce el espectro, es posible recuperar la función temporal, mediante
( ) 2( ) i f tx t X dfe tf π∞
−∞
−∞ < ∞= < +∫ (52)

- 16 -
Las ecuaciones (52) y (50) forman un par transformado de Fourier. Nótese que ( )X f es una función compleja definida para frecuencias positivas y negativas, aun cuando la función temporal ( )x t sea real. Por esta razón es usual expresar a ( )X f usando notación polar como
( ) ( ) i fX f X f e θ= (53)
Donde ( )X f es la amplitud espectral y θ la fase espectral.
3.5 Transformada Discreta de Fourier
Resulta evidente la imposibilidad de calcular la ec. (50) por medio de una integral que se define en un intervalo temporal entre −∞ y∞ . Para realizar un análisis de Fourier en una señal que se extiende en el tiempo, la idea es entonces definir una nueva señal ( )Tx t que sea igual a la señal original dentro del intervalo T, pero que fuera de este intervalo sea igual a cero. De esta manera logramos una estimación de ( )X f mediante el cálculo de la integral entre 0 y T, de la siguiente forma
( ) 2
0
( ) ( , )T
T Ti f teX f X f T x t dtπ−= = ∫ (54)
Además de esta forma se asegura el cumplimiento de la condición de existencia de la transformada, ec.(51).
Procesamiento de datos en forma digital Cuando se procesa datos en forma digital, el muestreo temporal se realiza en tiempos discretos y consecuentemente la transformada queda expresada en frecuencias discretas. La señal continua ( )x t es sustituida por un conjunto de valores discretos ( ), 0,1, 2... 1kx x k t k N= ∆ = − donde el intervalo de tiempo resulta del cociente del tiempo total y el número de puntos utilizados
TtN
∆ = (55)
Tomando nuevamente en consideración las expresiones de la Serie de Fourier, ec. (47) y ec. (49), se pueden calcular los coeficientes ( )TX f para las frecuencias discretas
, 1, 2, 3...nnf n f n NT
= = ∆ = ± ± ± (56)
de la siguiente forma
( ) 2
0
( , ) ni f tT
n T neX f T x t dt T cπ−= =∫ (57)
Esto significa que, cuando se realiza la transformada considerando frecuencias discretas nf , esto tiene como consecuencia que se obtiene temporalmente una serie de Fourier con
período T. Obsérvese de la ec. (56) que el intervalo de frecuencias f∆ y el período T resultan inversamente proporcionales, y que cuando 0f∆ → el período T →∞ , esto es
1fT
∆ = (58)

Vibraciones Mecánicas y Dinámica de Máquinas Notas de Clase - 17 -
Es entonces importante recalcar el concepto de la periodicidad de la función temporal,
que aparece como consecuencia de la discretización. De acuerdo con el Teorema del Muestreo (que se verá nuevamente al final del curso) resulta que la frecuencia máxima de análisis (frecuencia de Nyquist) es
/21
2 2NNf f
t= = ∆
∆ (59)
Por definición, la transformada discreta de Fourier (TDF) nX se calcula como una versión discreta del coeficiente de la serie de Fourier nc , ec. (49), esto es
0
211 N
n kk
i k t n fX ex tT
π− ∆−
=
∆= ∆∑ (60)
en la que reemplazando la ec.(55) y la ec. (58) queda
1
0
21( )kniN
n n kk
NX f X xN
eπ−
=
−= = ∑ (61)
Mientras que la trasnformada discreta inversa se define como
1
0
2( )
N
k k n
iN
k
kn
x t x X eπ−
=
= =∑ (62)
En la práctica la transformada se puede calcular mediante algoritmos programados (Cooley Tukey y otros). Por ejemplo mediante un procesador simbólico como Matlab, Mathcad, Mathematica, Octave, SciLab, etc., en donde el algoritmo calcula usualmente una versión escalada de las sumatorias de las ecs. (61) y (62).
4 Ecuación de la onda
Considerando una cuerda vibrante que se extiende en la dirección x en donde y es el desplazamiento transversal de cada partícula de la cuerda, la ecuación de la onda queda definida como
2 2
2 2 2
1y yx v t∂ ∂
=∂ ∂
(63)
De manera que la ecuación de la onda expresa la relación entre la derivada segunda temporal con la derivada segunda espacial de los desplazamientos a través de un término que debe ser entendido como la inversa de una velocidad al cuadrado. Esto se verá con más detalle en el capítulo de Dinámica del Continuo.
Derivando y utilizando la regla de la cadena es sencillo demostrar que cualquier función de la forma ( )f x ct es solución de la ecuación de la onda. El signo menos representa una onda que avanza en la dirección positiva de x, mientras que el signo + representa lo contrario.
De acuerdo con lo anteriormente expuesto respecto del Movimiento Armónico Simple (MAS) es posible expresar la solución de la ecuación de la onda utilizando funciones armónicas, por ej. una función de la forma
cos( )y kx tω= − (64)
donde el argumento de la función armónica es un ángulo de fase, compuesto de un término espacial kx y otro temporal tω . En el primer término k representa el número de onda, que es
- 18 -
2kvω π
λ= = (65)
y puede entenderse como la inversa de la longitud de onda, esto es cuántas ondas caben en una unidad de longitud, en este caso se expresó a la onda en radianes . En la expresión (65) λ es la longitud de onda. Adicionalmente la expresión (64) tiene una forma más general utilizando notación exponencial
[ ]exp ( )y i kx tω= − (66)
4.1 Velocidades de la onda
Considerando a cada partícula de la cuerda como un oscilador individual en la dirección y , es evidente que estos osciladores son afectados por el paso de la onda, pero no se mueven con ella, esto es, la onda se transmite pero no lo hacen los osciladores. Las partículas pueden tener movimiento transversal a la dirección de propagación de la onda, como en el caso de la cuerda vibrante, o bien en su misma dirección, como en el caso de vibraciones axiales de una barra. Otros tipos de onda existen en distintos medios con diferentes condiciones de borde libre. En todos los casos el movimiento de las partículas tiene efecto alrededor de sus posiciones de equilibrio. La relación de fases entre los osciladores es lo que observamos como onda, y no su movimiento a través del medio en el que se propaga.
Resumidamente en una onda transmitida hay tres velocidades que son distintas, pero que tienen relación matemática entre sí:
La velocidad de la partícula, esto es la velocidad de la partícula en su movimiento oscilatorio alrededor de la posición de equilibrio, que expresado matemáticamente en el caso de
la cuerda es yt
∂∂
.
La velocidad de fase de la onda, o sea la velocidad con la que planos de igual fase, como crestas o valles progresan a través del medio. Esta es la velocidad v de la ecuación de la onda (63) y su significado queda claro en un movimiento armónico simple, donde la forma de onda se mantiene constante y la propagación puede ser entendida como una traslación de una forma fija de onda (fase) en el medio. De la ec. (65) puede escribirse
v fkω λ= = (67)
La velocidad de grupo. Una superposición de ondas armónicas de diferentes frecuencias, números de onda y velocidades forman un grupo o un paquete de ondas, que resulta contenido por una envolvente, véase el apartado “Superposición de ondas de distinta frecuencia”. Ya que raramente las ondas se presentan en forma de frecuencias únicas aisladas, es necesario considerar la velocidad con que el grupo se propaga. Es factible que este grupo se disperse con el tiempo, ya que sus componentes armónicos pueden tener diferentes velocidades de propagación. La importancia de la velocidad de grupo es que representa la velocidad con la que se transmite la energía del grupo.
Considérese nuevamente el caso de superposición de ondas de distinta frecuencia, ahora basándose en una representación espacio-temporal
1 1 1 2 2 2cos( ) y cos( )y a t k x y a t k xω ω= − = − (68)
De acuerdo con lo expuesto, la superposición entrega como resultado

Vibraciones Mecánicas y Dinámica de Máquinas Notas de Clase - 19 -
1 2 1 2 1 2 1 21 2
( ) ( ) ( ) ( )2 cos cos2 2 2 2
t k k x t k k xy y y a ω ω ω ω+ + − − = + = − −
(69)
Denominando ahora a
1 2 1 2 1 2 1 2
2 2 2 2k k k kk kω ω ω ωω ω+ + − −
= = ∆ = ∆ = (70)
es
( ) ( )2 cos cosy a t kx t kxω ω= − ∆ −∆ (71)
la que puede interpretarse como una onda sinusoidal de frecuencia angular ω y número de onda k , pero modulada en su amplitud con otra onda de frecuencia angular ω∆ y número de onda k∆ . Dicho de otra forma, la amplitud de la onda es en sí misma una onda y su velocidad de fase de modulación es / kω∆ ∆ . Precisamente, la velocidad de fase de la onda de modulación es llamada velocidad de grupo.
Suponiendo las velocidades de fase 1 1 2 2/ /v k kω ω= = idénticas para ambas ondas, se tiene que la velocidad del grupo será:
1 2 1 2
1 2 1 2
( )g
v k kv vk k k kω ω− −
= = =− −
(72)
por lo que la velocidad del grupo y de las componentes resulta igual a v . Por esta razón el perfil de ondas propagada resultante de la combinación de componentes permanece constante.
Supóngase ahora que las velocidades de fase de las componentes son diferentes, esto es 1 1 2 2/ /k kω ω≠ . La velocidad de la máxima amplitud del grupo, esto es, la velocidad de grupo
es
1 2
1 2gv
k k kω ωω −∆
= =∆ −
(73)
y no resulta igual a las velocidades de fase de las componentes. La superposición de las ondas no permanece constante y el perfil del grupo cambia con el paso del tiempo.
Clasificación de los medios en donde se propaga la onda
Un medio en donde la velocidad de fase depende de la frecuencia ( / kω no es constante) es conocido como un medio dispersivo y la relación de dispersión expresa la variación de la frecuencia ω en función de k . Adicionalmente la velocidad de grupo se define a partir de la ec. (73) como
gdvdkω
= (74)
( )( )
g
d k v kd dvv v kdk dk dkω
= = = + (75)
Por ejemplo, en un medio óptico transparente se define el índice de refracción como
/n c v= (76)
donde c es la velocidad de la luz en el vacío y v la velocidad de fase de la luz en ese medio. De la ec. (65) y (76) queda que
- 20 -
/kc nω = (77)
y
2 1gd c ck dn k dnv vdk n n dk n dkω = = − = −
(78)
De la misma forma en la ec. (75) es
2
2dv dv d dv dvk k kdk d dk d k d
λ π λλ λ λ
= = − = − (79)
y
gdvv vd
λλ
= − (80)
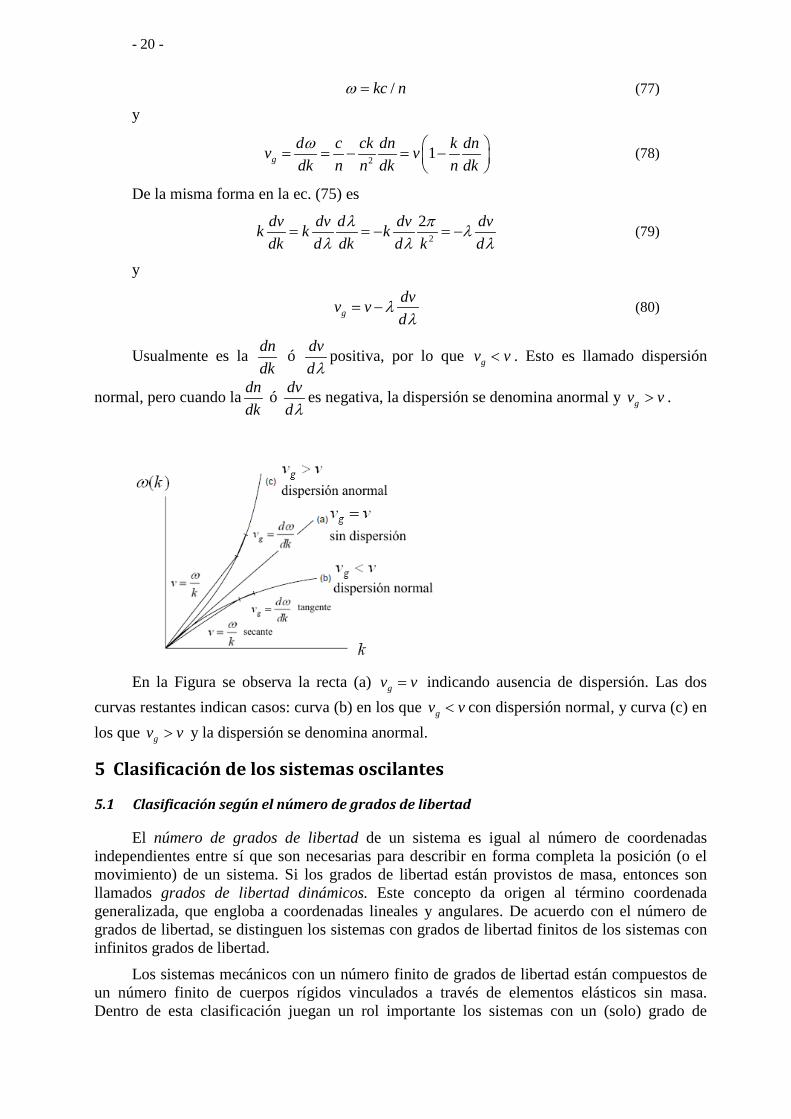
Usualmente es la dndk
ó dvdλ
positiva, por lo que gv v< . Esto es llamado dispersión
normal, pero cuando la dndk
ó dvdλ
es negativa, la dispersión se denomina anormal y gv v> .
En la Figura se observa la recta (a) gv v= indicando ausencia de dispersión. Las dos
curvas restantes indican casos: curva (b) en los que gv v< con dispersión normal, y curva (c) en los que gv v> y la dispersión se denomina anormal.
5 Clasificación de los sistemas oscilantes
5.1 Clasificación según el número de grados de libertad
El número de grados de libertad de un sistema es igual al número de coordenadas independientes entre sí que son necesarias para describir en forma completa la posición (o el movimiento) de un sistema. Si los grados de libertad están provistos de masa, entonces son llamados grados de libertad dinámicos. Este concepto da origen al término coordenada generalizada, que engloba a coordenadas lineales y angulares. De acuerdo con el número de grados de libertad, se distinguen los sistemas con grados de libertad finitos de los sistemas con infinitos grados de libertad.
Los sistemas mecánicos con un número finito de grados de libertad están compuestos de un número finito de cuerpos rígidos vinculados a través de elementos elásticos sin masa. Dentro de esta clasificación juegan un rol importante los sistemas con un (solo) grado de
Vibraciones Mecánicas y Dinámica de Máquinas Notas de Clase - 21 -
libertad, por su simplicidad, porque muchos fenómenos oscilatorios son explicados con claridad y sencillez, y porque no en pocos casos los sistemas reales pueden ser modelados (al menos en forma aproximada) mediante modelos de un grado de libertad.
Los sistemas con masa distribuida tienen infinitos grados de libertad y el estudio de las vibraciones es parte de la llamada Dinámica del Continuo. Los modelos usualmente estudiados en este caso son cuerdas, vigas, placas y cáscaras. Teniendo en cuenta los métodos de resolución, en muchas oportunidades los sistemas con infinitos grados de libertad se estudian mediante aproximaciones de un número finito de masas discretas.
La descripción matemática de los osciladores con grados de libertad finitos conduce a un sistema de ecuaciones diferenciales ordinario, mientras que los sistemas con infinitos grados de libertad conducen a ecuaciones diferenciales con derivadas parciales.
5.2 Clasificación según el carácter de la ecuación diferencial asociada
Según esta clasificación las ecuaciones diferenciales que responden a los distintos sistemas pueden ser lineales o no lineales, dependiendo de que si las variables independientes y sus derivadas aparezcan con potencias iguales a uno o mayores. Los sistemas reales pueden en general ser sólo descriptos por ecuaciones no lineales, sin embargo bajo ciertas hipótesis, es posible una linealización de las ecuaciones que describen el movimiento del oscilador. La solución de estas ecuaciones es significativamente más sencilla que las ecuaciones no lineales. La ventaja principal en este caso, es que la solución general puede ser construida como superposición de soluciones particulares.
Para sistemas lineales con un número finito de grados de libertad, es posible encontrar una expresión de la solución exacta, cuando los coeficientes de la ecuación diferencial son constantes, es decir independientes del tiempo. En este caso es la ecuación diferencial es, en el uso común, lineal. Si los coeficientes son sin embargo dependientes del tiempo, se denominan a las ecuaciones diferenciales y a los sistemas asociados reolineales.
La solución de los sistemas no lineales es, salvo algunas excepciones, sólo posible en forma aproximada o por medios numéricos.
5.3 Clasificación según la fuente generadora de las vibraciones
En esta clasificación se tiene en cuenta la causa generadora del movimiento. La denominación oscilador libre indica que mientras oscila, el sistema no está sometido a la causa que originó al movimiento. Matemáticamente se representan por ecuaciones diferenciales homogéneas y las oscilaciones a que tiene lugar se denominan oscilaciones autónomas. Las vibraciones libres pueden ser amortiguadas o no, dependiendo si se consideran términos disipativos que representan la pérdida de energía en el sistema. El caso no amortiguado es obviamente una simplificación del caso real, construido para simplificar al modelo físico.
Las vibraciones autoexcitadas son generadas en sistemas en donde existe una forma de almacenamiento de energía, desde donde el oscilador extrae energía en forma rítmica, en fase con su propio movimiento. Un ejemplo típico es el reloj mecánico, que libera la energía del resorte torsional –que representa el acumulador de energía– mediante un mecanismo disparado por el movimiento del sistema. Lo importante aquí es que el sistema regula la forma de extracción de energía mediante su frecuencia propia. Los sistemas autoexcitados pertenecen al tipo de sistemas autónomos, ya que las oscilaciones están determinadas por las frecuencias naturales, que dependen de los parámetros del sistema. Son descriptos por ecuaciones homogéneas, que en general son no lineales.

- 22 -
Las vibraciones forzadas, o excitadas externamente, son causadas por cargas que actúan
en forma parcial o temporalmente durante el movimiento, y que no dependen de la magnitud del movimiento que originan. Tales sistemas y sus ecuaciones diferenciales son llamadas heterónomas. Desde el punto de vista matemático, las ecuaciones diferenciales son no homogéneas.
Las cargas pueden ser clasificadas como periódicas o no periódicas, siempre que puedan ser de alguna manera descriptas mediante ecuaciones matemáticas. Si las cargas fuesen no determinísticas, esto es aleatorias, se tienen entonces vibraciones aleatorias. Un ejemplo de cargas determinísticas es el caso de un ventilador, cuyo rotor presenta un grado de desequilibrio, en este caso, la carga es periódica con la frecuencia de giro del rotor. Una vibración aleatoria es por ejemplo la causada en un avión por cargas aerodinámicas en vuelo.
Otro tipo de excitación dinámica es la excitación paramétrica. Los sistemas excitados en forma paramétrica presentan también cargas externas dependientes del tiempo, sin embargo su origen se encuentra en la variación de los parámetros de la ecuación diferencial. Matemáticamente responden entonces a ecuaciones diferenciales homogéneas con coeficientes dependientes del tiempo. Un ejemplo es un péndulo con largo variable.
Cabe acotar que los distintos tipos de excitaciones dinámicas son independientes y pueden aparecer en distintas combinaciones: es posible encontrar sistemas con excitación forzada lineales o no lineales, con uno o más grados de libertad, por ejemplo. También son posibles superposiciones de las excitaciones, un sistema puede estar excitado por vibraciones forzadas y simultáneamente por vibraciones autoexcitadas, o por variación paramétrica.
____________________________________________________________________________
Ejercicios de aplicación del capítulo Utilizando un procesador simbólico (Matlab, Octave):
1) Grafique dos señales de igual frecuencia y su suma
2) Grafique dos señales de distinta frecuencia (muy parecidas) y su suma, identifique los paquetes de ondas.
3) Grafique un ejemplo de modulación de amplitud
4) Grafique un ejemplo de modulación de frecuencia
5) Cite las propiedades (frecuencia y número de onda) de dos señales armónicas denominadas a y b , cuya suma posea velocidad de grupo positiva.
6) Cite las propiedades (frecuencia y número de onda) de dos señales armónicas denominadas a y b, cuya suma posea velocidad de grupo negativa.