







Idiomas
Páginas
Jurídico


1
1. Sistemas Digital 1. Sistemas Digital _______________________________________________ 1
1.1. Historia __________________________________________________________________________________________________________ 3 1.2. Futuro ___________________________________________________________________________________________________________ 4 1.3. Características del Control Digital ___________________________________________________________________________________ 5 1.4. ¿Porqué una teoría especial? ________________________________________________________________________________________ 6 1.5. Sistemas Discretos _________________________________________________________________________________________________ 8 1.6. Características Discretas Intrínsecas de los Sistemas ___________________________________________________________________ 10 1.7. Muestreo de Sistemas Continuos ____________________________________________________________________________________ 11 1.8. Secuencias ______________________________________________________________________________________________________ 14 1.9. Sistema Discreto _________________________________________________________________________________________________ 16 1.10. Ecuaciones en Diferencias ________________________________________________________________________________________ 17 1.11. Secuencia de Ponderación de un Sistema. ____________________________________________________________________________ 19 1.12. Estabilidad _____________________________________________________________________________________________________ 22 1.13. Respuesta en Frecuencia __________________________________________________________________________________________ 23 1.14. Transformada de Fourier de una Secuencia __________________________________________________________________________ 25 1.15. Teorema del Muestreo ___________________________________________________________________________________________ 26 1.16. Transformada de Laplace ________________________________________________________________________________________ 32
1.16.1. Transformada de Laplace de una Secuencia ___________________________________________________________________________________ 33 1.17. Transformada en Z ______________________________________________________________________________________________ 35 1.18. Reconstrucción _________________________________________________________________________________________________ 38
1.18.1. Reconstrucción ideal _____________________________________________________________________________________________________ 38 1.18.2. Bloqueadores ___________________________________________________________________________________________________________ 40
2
1.19. Aparición de Frecuencias Espurias _________________________________________________________________________________ 42 1.20. Representación en Variables de Estado _____________________________________________________________________________ 43 1.21. Cálculo de las Matrices Discretas __________________________________________________________________________________ 45 1.22. Evolución del Estado _____________________________________________________________________________________________ 48 1.23. Pasaje de Discreto a Continuo _____________________________________________________________________________________ 49 1.24. Muestreo de Sistemas con Retardo _________________________________________________________________________________ 52 1.25. Variables de Estados con Otro Bloqueador __________________________________________________________________________ 57 1.26. Modelos de Entrada Salida ________________________________________________________________________________________ 59 1.27. Respuesta Impulsional ___________________________________________________________________________________________ 59 1.28. Operador Desplazamiento ________________________________________________________________________________________ 62 1.29. Función de Transferencia _________________________________________________________________________________________ 67
1.29.1. Función de Transferencia en Transformada Z __________________________________________________________________________________ 74 1.29.2. Discretización de la Función de Transferencia _________________________________________________________________________________ 75
1.30. Relación de Polos y Ceros Continuos y Discretos ______________________________________________________________________ 83 1.31. Sistemas con Función de Transferencia Inversa Inestable ______________________________________________________________ 87 1.32. Elección del Período de Muestreo __________________________________________________________________________________ 93 1.33. Referencias _____________________________________________________________________________________________________ 96
3
1.1. Historia
• 1950: Período Inicial. Primeras computadoras de procesos. Grandes. Gran consu-mo. Poca fiabilidad.
• 1956: Texaco: 26 caudales, 72 temperaturas y 3 composiciones. Suma en 1 ms, multiplicación en 20 ms. TMEF ó MTBF 50 a 100 hs solo para la cpu. No existen modelos en tiempo real. Escasos sensores. Rechazo a las nuevas tecnologías.
• 1962: Imperial Chemical Industries (Inglaterra): 224 entradas, 129 válvulas. Control Digital Directo (CDD o DDC). Suma 0,1 ms, multiplicación en 1 ms. TMEF 1000 hs. Se reemplazan tableros de instrumentos por teclado y pantallas. Fácil reconfiguración.
• 1965: Minicomputadoras. Circuitos integrados. Reducción de costos y tamaños. Más rápidos y fiables. Suma 0,002 ms, multiplicación 0,007ms. TMEF 20000 hs. Aplicable a proyectos pequeños. Crecen las aplicaciones de 5000 a 50000 en 5 años. Costo medio (1975) 10000 dólares. Costo del proyecto a 100000 dólares.
• 1975: Microcomputadoras. Costo medio de 500 dólares. Consumo despreciable. Control dedicado. Desarrollo de la teoría de control.
• 1980: PLC. Secuenciamiento Lógico. Control Distribuido.

4
1.2. Futuro
Se prevén avances en:
• Conocimiento del proceso: Lentos pero constantes. Recolección de datos.
• Técnicas de medición: Sensores inteligentes. Incorporan computadores a bordo.
• Tecnología de computadores: El más importante. VLSI. Comunicaciones. Presentación de la información. Nuevos lenguajes. Arquitectura.
• Teoría de control: Identificación de sistemas. Algoritmos de control. Optimización. Control adaptativo. Control inteligente. Sistemas multivariables.
Pero no se podrá despegar el futuro de esta temática al del avance de los
computadores digitales.
5
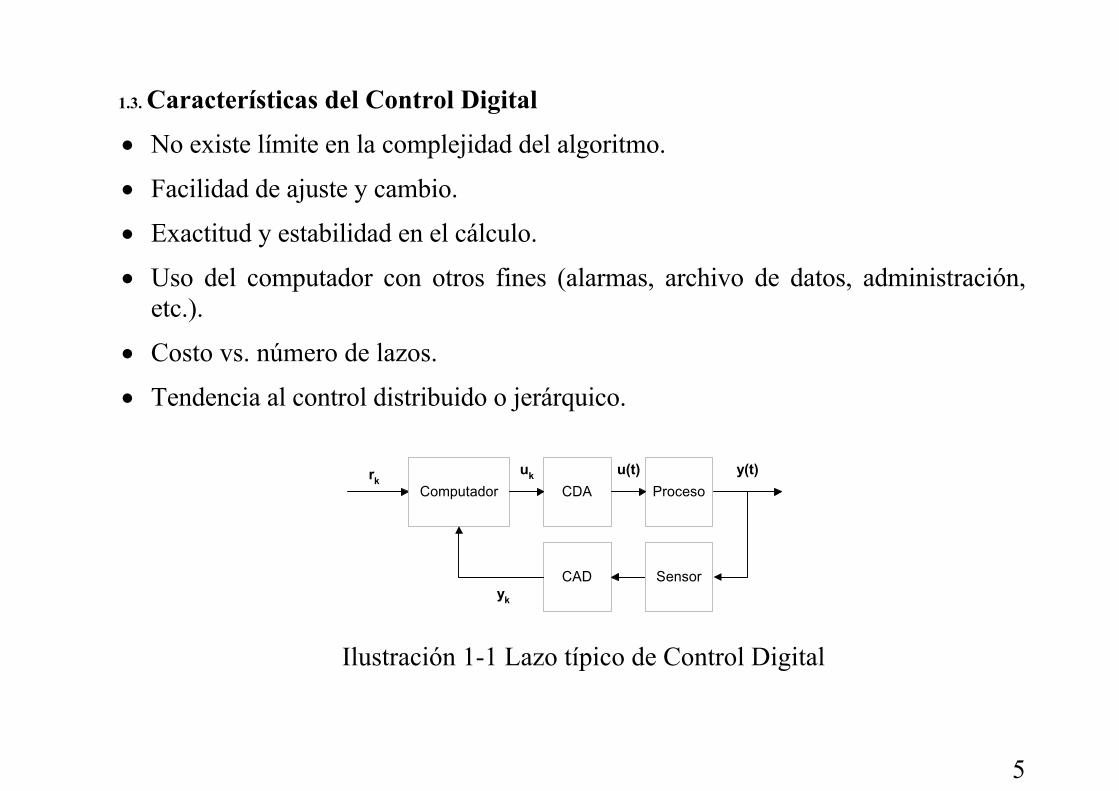
1.3. Características del Control Digital
• No existe límite en la complejidad del algoritmo.
• Facilidad de ajuste y cambio.
• Exactitud y estabilidad en el cálculo.
• Uso del computador con otros fines (alarmas, archivo de datos, administración, etc.).
• Costo vs. número de lazos.
• Tendencia al control distribuido o jerárquico.
-
y(t)Computador Proceso
yk
u(t)CDA
CAD Sensor
rkuk
Ilustración 1-1 Lazo típico de Control Digital
6
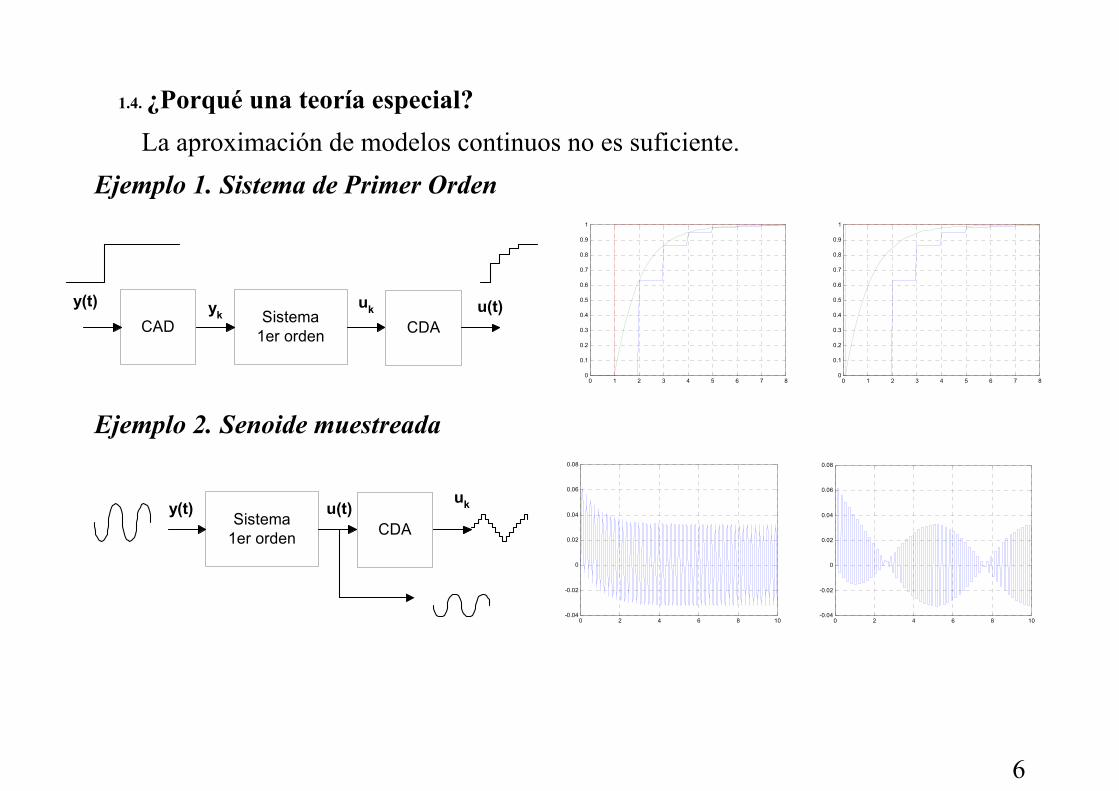
1.4. ¿Porqué una teoría especial? La aproximación de modelos continuos no es suficiente.
Ejemplo 1. Sistema de Primer Orden
y(t)Sistema
1er orden
yk u(t)CDACAD
uk
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Ejemplo 2. Senoide muestreada
y(t) Sistema1er orden
u(t)CDA
uk
0 2 4 6 8 10-0.04
-0.02
0
0.02
0.04
0.06
0.08
0 2 4 6 8 10-0.04
-0.02
0
0.02
0.04
0.06
0.08

7
Ejemplo 3. Control de Tiempo Finito Doble Integrador. No es posible analizar este control en forma continua
0 2 4 6 8 10-1
-0.5
0
0.5
1
1.5
Para períodos de muestreos muy pequeños se puede aproximar al control continuo. Se pueden utilizar técnicas digitales específicas de control.
8
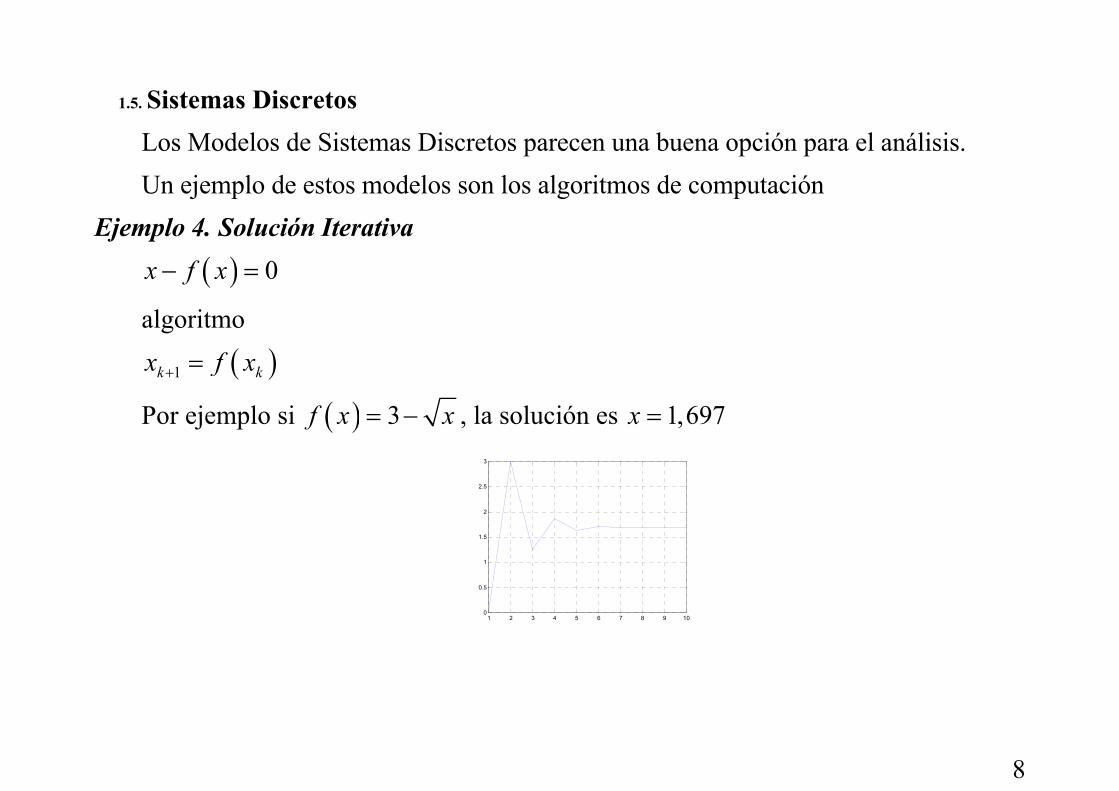
1.5. Sistemas Discretos Los Modelos de Sistemas Discretos parecen una buena opción para el análisis. Un ejemplo de estos modelos son los algoritmos de computación
Ejemplo 4. Solución Iterativa
( ) 0x f x− =
algoritmo
( )1k kx f x+ =
Por ejemplo si ( ) 3f x x= − , la solución es 1,697x =
1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
9
Ejemplo 5. Control PI r=lectura_referencia
y=lectura_salida
e=r-y
u=kp*(e+i)
escritura_actuacion
i=i+T*e/Ti
10
1.6. Características Discretas Intrínsecas de los Sistemas La característica discreta de algunos sistemas está en la etapa de medición:
• antena de radar: información en una dirección una vez por revolución.
• mediciones químicas: espectrografía o cromatógrafos.
• sistemas económicos En otros aparece en la actuación:
• tiristor
• motor de combustión interna
• sistemas biológicos. transmisión por pulsos nerviosos Lo común a todos los sistemas es la periodicidad del muestreo. Esto complica el análisis con las herramientas convencionales. Se simplifica el análisis estudiándolos en el momento del muestreo.
11
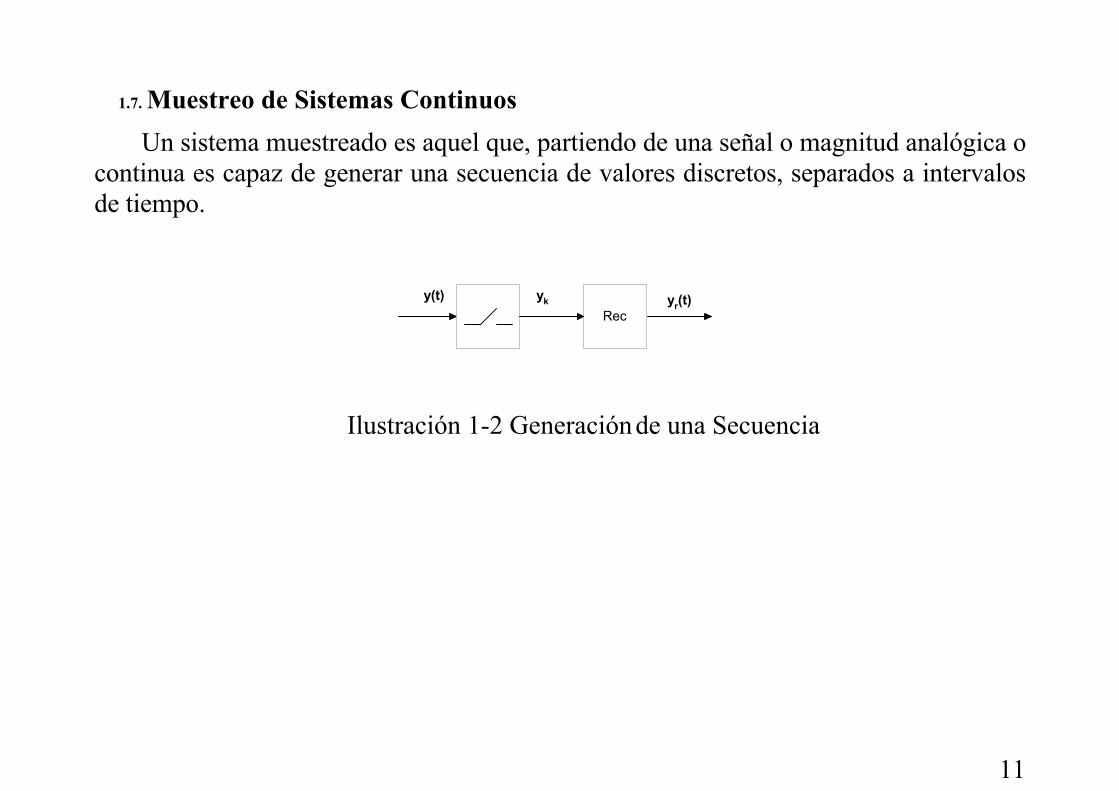
1.7. Muestreo de Sistemas Continuos Un sistema muestreado es aquel que, partiendo de una señal o magnitud analógica o
continua es capaz de generar una secuencia de valores discretos, separados a intervalos de tiempo.
-
y(t)Rec
yk yr(t)
Ilustración 1-2 Generación de una Secuencia
12
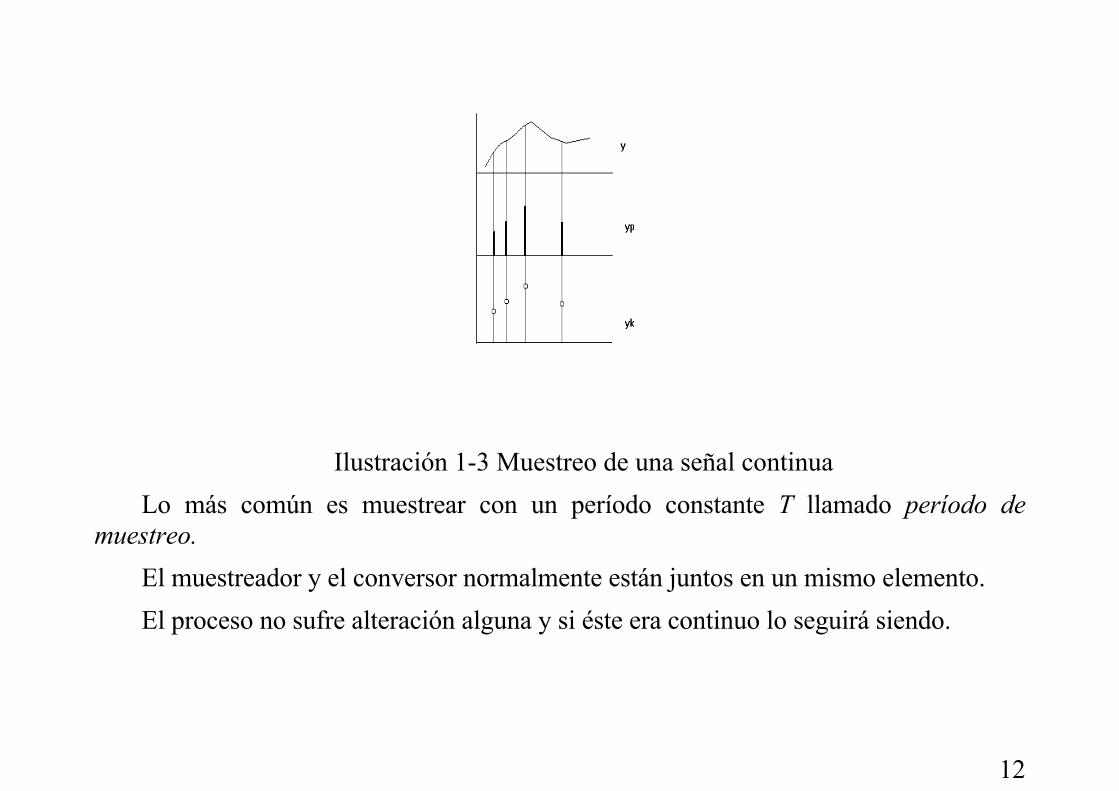
Ilustración 1-3 Muestreo de una señal continua
Lo más común es muestrear con un período constante T llamado período de muestreo.
El muestreador y el conversor normalmente están juntos en un mismo elemento. El proceso no sufre alteración alguna y si éste era continuo lo seguirá siendo.
13
y(t)Computador
yk u(t)CDACAD B
uk+Tc
- -
(mayor demora)
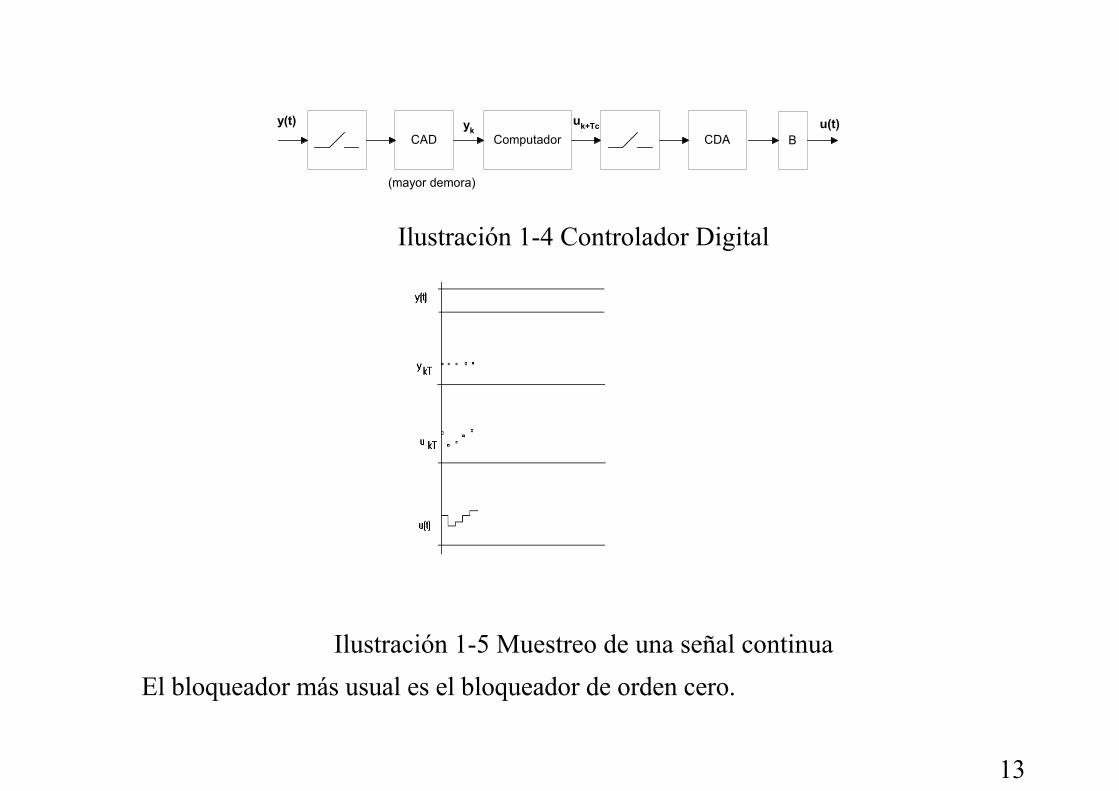
Ilustración 1-4 Controlador Digital
Ilustración 1-5 Muestreo de una señal continua
El bloqueador más usual es el bloqueador de orden cero.
14
1.8. Secuencias El computador lee y genera secuencias de números.
k -3 -2 -1 0 1 = , , , , u u u u u u [1.1]
Suma
k kk xu v= + [1.2]
Producto por una constante
kk = m y x [1.3]
Impulso y Escalón forma siguiente:
1,0,0,
1,1,1,k
k
=
= l
δ [1.4]
15
Ilustración 1-6 Secuencias Impulso y Escalón

16
1.9. Sistema Discreto
SistemaDiscreto
uk yk
Ilustración 1-7 Sistema Discreto
Sumador
k
iki=1
= y u ∑ [1.5]
Promediador
( )k-1 k k+1k1 = + + y u u u3
[1.6]
17
1.10. Ecuaciones en Diferencias t
T 0
1x (t) = (t) dtT
ω∫ [1.7]
k-1
T 0k
T 0
T
1x (kT) = T (iT)T1x ((k +1)T) = T (iT)
TTx ((k +1)T) - x (kT) = (kT)T
ω
ω
ω
∑
∑ [1.8]
ecuación en diferencia:
T
Tx ((k +1)T) = x (kT) + (kT)T
ω [1.9]
en general k 1 k-1 n k-n 0 k 1 k-1 m k-m = + + + x a x a x b b bω ω ω+ + + [1.10]

18
Linealidad
k kk k
k k k k
1 21 2
1 2 1 21 2 1 2
, y yu u
+ + y yu uα α α α
⇒ ⇒
⇒ [1.11]
19
1.11. Secuencia de Ponderación de un Sistema. Vinculación de entrada y salida
SistemaDiscreto
δk gk
Ilustración 1-8 Respuesta al Impulso Si el sistema es causal se cumple,
k = 0 k < 0g ∀ [1.12]
k n k-nn=-
= u u δ∞
∞∑ [1.13]
ku valor de la secuencia en ese instante

20
Ejemplo
k k-1 k-2
2 , 3 , 5 = 2 1 , 0 , 0 + 3 0 , 1 ,0 + 5 0 , 0 , 1
= 2 + 3 + 5 δ δ δ
[1.14]
i k-ik k-i ii=- i=-
= = y g gu u∞ ∞
∞ ∞∑ ∑ [1.15]
Convolución discreta:
kk k
i k-ik k-i ii=- i=-
= * y g u
= = y g gu u∞ ∞
∞ ∞∑ ∑
[1.16]
Secuencia de Ponderación Sean las secuencias de ponderación y de entrada de un sistema las siguientes
k
k
= 1 , 2 , 1 g
= 0 , 3 , 4 u
[1.17]

21
1 2 3 4 5 60
2
4
6
8
10
12
Ilustración 1-9 Ejemplo de secuencia de ponderación
0-i 3 2 10 i -3 -2 -1i=-
1-0 1-1 1-21 0 1 2
2-0 2-1 2-22 0 1 2
3-0 3-1 3-23 0 1 2
4-04 0
= = + + = 0y g g g gu u u u
= + + = 3y g g gu u u = + + = 4 + 3 . 2 = 10y g g gu u u = + + = 4 . 2 + 3 . 1 = 11y g g gu u u = y gu
∞
∞∑
4-1 4-21 2
5
+ + = 4 . 1 = 4g gu u = 0y
[1.18]

22
1.12. Estabilidad
Se dice que un sistema discreto es estable si ∀ secuencia de entrada acotada, la salida lo es.
k-ik ii=-
k-i k-ik i ii=- i=-
= y g u
= y g gu u
∞
∞
∞ ∞
∞ ∞
≤
∑
∑ ∑
[1.19]
si uk es acotada se verifica
k
k ii=-
c ku
c y g∞
∞
≤ ∀
≤ ∑
[1.20]
condición para que yk sea acotada es que
)) lim
ii
i=- ii
a acotadag < siig
b = 0g
∞
∞ →∞
∞
∑ [1.21]

23
1.13. Respuesta en Frecuencia
Sistema con k g
entrada
jkk = u e ω
[1.22]
salida
j (k-i)k i
i=-
j k -j ik i
i=-
= y g e
= y ge e
ω
ω ω
∞
∞
∞
∞
∑
∑
[1.23]
(la última sumatoria es independiente de k)
-j i j kk i
i=-
= y g e eω ω∞
∞
∑ [1.24]
respuesta en frecuencia

24
-j ii
i=-
G( ) = g e ωω∞
∞∑ [1.25]
G es periódica con respecto a 2ω π=
j kk = G( ) y e ωω [1.26]
G es el desarrollo en serie de Fourier (según [1.23]) por lo tanto los coeficientes serán:
j kk
-
1 = G( ) dg e2
πω
π
ω ωπ ∫ [1.27]
Ejemplo 6. Pasa Bajos.
c
c
1 < G( ) =
0 <
ω ωω
ω πω
≤ [1.28]
c
c
j kck
-
1 1 = d = sen (k )g e2 k
ωω
ω
ω ωπ π∫ [1.29]
es no causal

25
1.14. Transformada de Fourier de una Secuencia
limn
-j i -j ii i k n
i=-n i=-
j kk
-
( ) = = x e x e
1 = ( ) dx e2
ω ω
πω
π
ωχ
χ ω ωπ
∞
→∞∞
∑ ∑
∫
[1.30]
para que χ exista debe ser
ii=-
< x∞
∞
∞∑ [1.31]
ik k ii=-
= y g u∞
−∞∑ [1.32]
-j k -j k -j k -j i -j (k i)i i ik k i k i k i
k=- k=- i=- k=- i=- i=- k=-
= = = y g g ge e u e u e u eω ω ω ω ω∞ ∞ ∞ ∞ ∞ ∞ ∞
−− − −
∞ ∞ ∞ ∞ ∞ ∞ ∞
∑ ∑ ∑ ∑ ∑ ∑ ∑ [1.33]
el último [] va desde −∞ a +∞ por lo que es independiente de i (i-k = k) ( ) = G( ) U( )ω ω ωΥ [1.34]
26
1.15. Teorema del Muestreo Una señal continua con espectro en frecuencia nulo fuera del intervalo[ ]0 0,ω ω− es
reconstruible totalmente si se la muestrea con una frecuencia 02sω ω> . La reconstrucción se obtiene mediante el siguiente cálculo:
( ) ( )( )( )
( )( )sen 2
2s
k s
t kTf t f kT
t kTω
ω
∞
=−∞
−=
−∑ [1.35]

27
- Demostración La transformada de Fourier y la antitransformada de la función continua son:
( ) ( )j tF e f t dtωω∞ −
−∞= ∫ [1.36]
( ) ( )12
j tf t e F dω ω ωπ
∞
−∞= ∫ [1.37]
la transformada de Fourier discreta de la secuencia ( ) kf f kT= es
( ) j ks k
k
F e fωω∞
=−∞
= ∑ [1.38]
y su antitransformada
( ) ( )12
j kk sf f kT e F d
π ω
πω ω
π −= = ∫ [1.39]
( )f kT tiene dos formas de calcularse, de acuerdo a [1.37] y a [1.39].
La [1.37] se puede integrar por partes
28
( ) ( ) ( )( )
( )2 1
2 11 1
2 2
rj kT j kTT
rr T
f kT e F d e F dπ
ω ωπω ω ω ω
π π
+∞∞
−−∞=−∞
= = ∑∫ ∫ [1.40]
cambio de variable: 2 rTπω Ω+
=
Ω frecuencia relativa al período de muestreo
( ) ( )
( )2 1 2
2 11 2 2
2
r rj kTT T
rr T
r rf kT e F dT T
π π
ππ π
π
+ Ω+∞
−=−∞
Ω + Ω+ =
∑ ∫ [1.41]
( ) ( )21 1 22
j r k
r
rf kT e F dT T
π π
π
ππ
∞Ω+
−=−∞
Ω + = Ω
∑ ∫ [1.42]
nota: 2 1j rke π =
( ) 1 1 22
j k
r
rf kT e F dT T
π
π
ππ
∞Ω
−=−∞
Ω + = Ω
∑ ∫ [1.43]
1 1 22
j kk
r
rf e F dT T
π
π
ππ
∞Ω
−=−∞
Ω + = Ω
∑∫ [1.44]
comparar [1.44] con [1.39].
29
Relación entre la Transformada de Fourier discreta y continua:
( ) 1 2s
r
rF FT T
πω∞
=−∞
Ω + =
∑ [1.45]
o, dado que 2
s
T πω
=
( ) ( )1 2 1s s
r r
rF F F rT T T
πω ω ω ω∞ ∞
=−∞ =−∞
= + = +
∑ ∑ [1.46]
Si la frecuencia de muestreo es mayor a dos veces la máxima frecuencia para la cual la Transformada de Fourier es no nula, la Transformada de la señal muestreada será una repetición infinita del lóbulo de la transformada continua.
Tomando una parte de esta transformada se puede reconstruir exactamente la señal continua, excepto un factor de escala 1
T .

30
1
F(ω)
ω
ωc
1/T
Fs(ω)
ωωc
π/T=ωs/2−π/T=ωs/2 3ωs/2
ωs
1/T
Fs(ω)
ωωc
π/T=ωs/2−π/T=ωs/2
2ωsωs
Ilustración 1-10: Transformada de Fourier de la señal continua y de la señal
muestreada con frecuencia superior e inferior a la de corte. 2s Nω ω= Frecuencia de Nyquist.

31
El reconstructor de la ecuación [1.35] es no causal
-50 0 50-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
T
Ilustración 1-11 Respuesta impulsional del reconstructor ideal
32
1.16. Transformada de Laplace La Transformada de Laplace de una función continua se define como
0
-stsX( s ) = L x(t) x(t) dte
s = + j σ ω
∞= ∫ [1.47]
Transformada de un impulso
( ) ( )0
1-sts L t t dteδ δ
∞= =∫ [1.48]
y de un impulso desplazado en un tiempo Tk
( ) -skTs L t kT eδ − = [1.49]
33
1.16.1. Transformada de Laplace de una Secuencia Secuencia kx , muestreo de una señal continua, se puede escribir como una
sumatoria de impulsos modulados por los elementos de la secuencia,
kTkk=0
x (t - kT)x δ∞
=∑ [1.50]
se define su transformada de Laplace como
( ) kTskTs
k=0
L s x e∞
−= ∑ [1.51]
es periódica respecto de s con período 2 Tω π=
Todas las singularides se repiten.

34
1π/Τ
2π/Τ
3π/Τ
Ilustración 1-12 Transformada de Laplace Discreta
35
1.17. Transformada en Z Solo se define para secuencias
( ) ( ) kk k
k=
Z x X z x z∞
−
−∞
= = ∑ [1.52]
donde z es una variable compleja. La Transformada en Z de la secuencia impulso es
1,0,0,kδ = [1.53]
( ) 1z∆ = [1.54]
de una secuencia
21, , ,kx a a= [1.55]
( ) ( )1 kk k
k= k=
X z a z az∞ ∞
− −
−∞ −∞
= =∑ ∑ [1.56]
que converge para z a> y en cuyo caso la sumatoria resulta

36
( ) 1
11
X zaz−=
− [1.57]
37
- Propiedades Linealidad:
( ) ( ) ( )Z af bg aZ f bZ g+ = + [1.58]
Desplazamiento
( ) ( )d dZ q f z Z f− −= [1.59]
Valor Inicial
( ) ( )0
lim limkk zf Z f
→ →∞= [1.60]
Valor Final
( ) ( ) ( )1
1lim lim 1kk z
f z Z f−
→∞ →= − [1.61]
si ( ) ( )11 z Z f−− no tiene ningún polo fuera del círculo unidad.

38
1.18. Reconstrucción ¿Es posible reconstruir la señal continua una vez muestreada?
-
y(t)Rec
yk yr(t)
Ilustración 1-13 Proceso de Reconstrucción
1.18.1. Reconstrucción ideal La reconstrucción se hace con el siguiente proceso
( ) ( )( )( )
( )( )sen 2
2s
rk s
t kTf t f kT
t kTω
ω
∞
=−∞
−=
−∑ [1.62]
es no causal
39
-10 -5 0 5 10-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
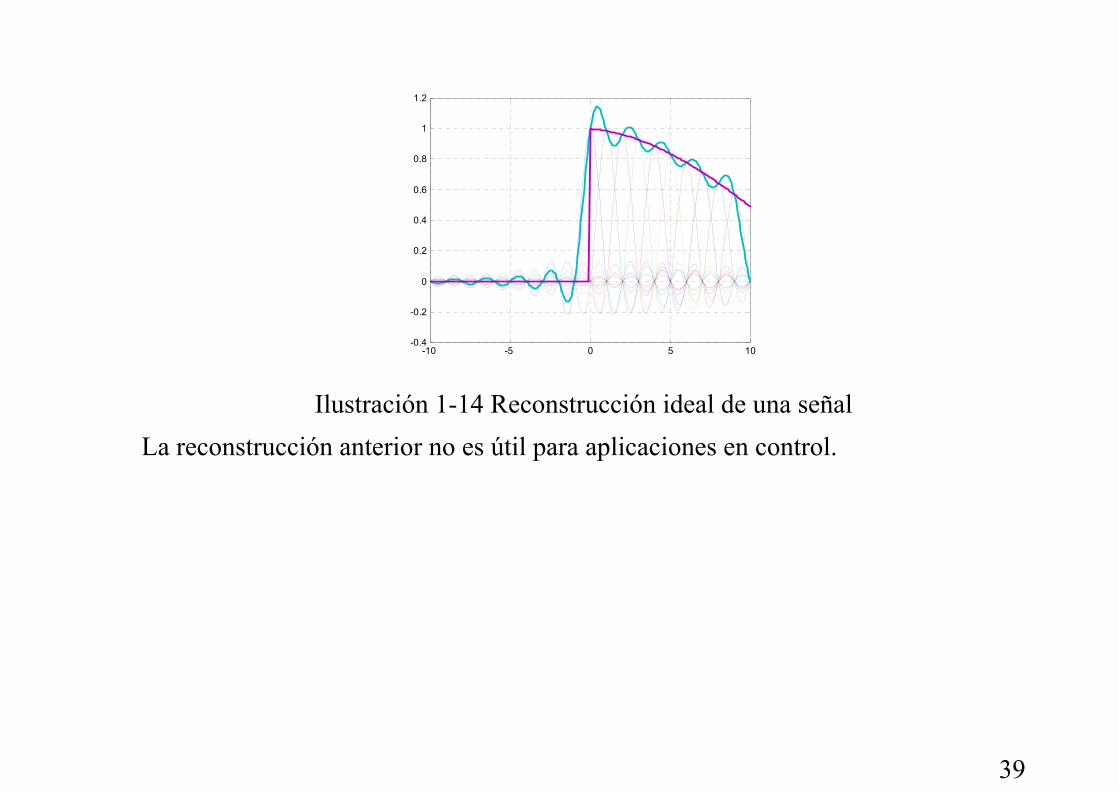
Ilustración 1-14 Reconstrucción ideal de una señal
La reconstrucción anterior no es útil para aplicaciones en control.

40
1.18.2. Bloqueadores El más usual es el bloqueador de orden cero
0 1 2 3 4 5-1.5
-1
-0.5
0
0.5
1
1.5
Ilustración 1-15 Reconstrucción con Bloqueador de Orden Cero
Otro bloqueador causal:

41
0 0.2 0.4 0.6 0.8 1-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
Ilustración 1-16 Bloqueador de Orden Uno
no necesariamente tiene menor error que el bloqueador de orden cero.
42
1.19. Aparición de Frecuencias Espurias
0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
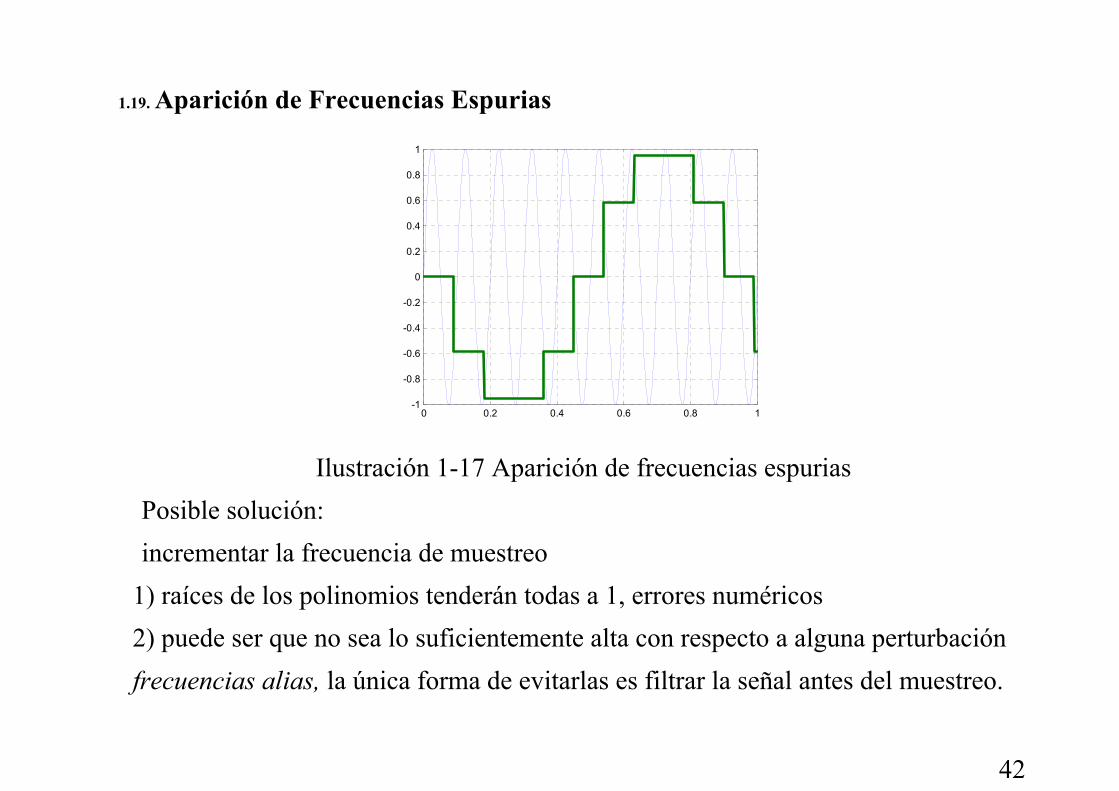
Ilustración 1-17 Aparición de frecuencias espurias
Posible solución: incrementar la frecuencia de muestreo
1) raíces de los polinomios tenderán todas a 1, errores numéricos 2) puede ser que no sea lo suficientemente alta con respecto a alguna perturbación frecuencias alias, la única forma de evitarlas es filtrar la señal antes del muestreo.
43
1.20. Representación en Variables de Estado La planta a controlar sigue siendo continua.
( ) ( ) ( )( ) ( ) ( )
x t Ax t Bu t
y t Cx t Du t
= +
= + [1.63]
Se lo controla con una señal u reconstruida con un bloqueador de orden cero.
( ) ( ) ( ) ( ) ( )k
k
tA t t A tk t
x t e x t e Bu dτ τ τ− −= + ∫ [1.64]
para el instante siguiente resulta,
( ) ( ) ( ) ( ) ( )111 1
kk k
k
tA t t A tk k k kt
x t x e x t e d Bu tτ τ++ − −+ += = + ∫ [1.65]
Muestreo sincrónico y período de muestreo constante
( ) ( ) ( ) ( ) ( )( ) ( ) ( )
1 1 1, ,k k k k k k k
k k k
x t t t x t t t u t
y t Cx t Du t+ + += Φ + Γ
= +
[1.66]
con
44
( ) ( )
( ) ( )
1
1
1
1
,
,
k k
k
k
A t tk k
t A tk k t
t t e
t t e d Bτ τ
+
+
−+
−+
Φ =
Γ = ∫ [1.67]
Este modelo es exacto solo para el instante de muestreo. Queda expresado como una ecuación en diferencias. Si el período de muestreo se lo llama T, si el sistema es invariante en el tiempo y
la matriz D es nula:
1k k k
k k
x x uy Cx
+ = Φ + Γ =
[1.68]
con
0
AT
T A
e
e d Bτ τ
Φ =
Γ = ∫ [1.69]

45
1.21. Cálculo de las Matrices Discretas Una posible forma es utilizar la Transformada de Laplace ya que
( ) 11ATe L sI A −−= − [1.70]
46
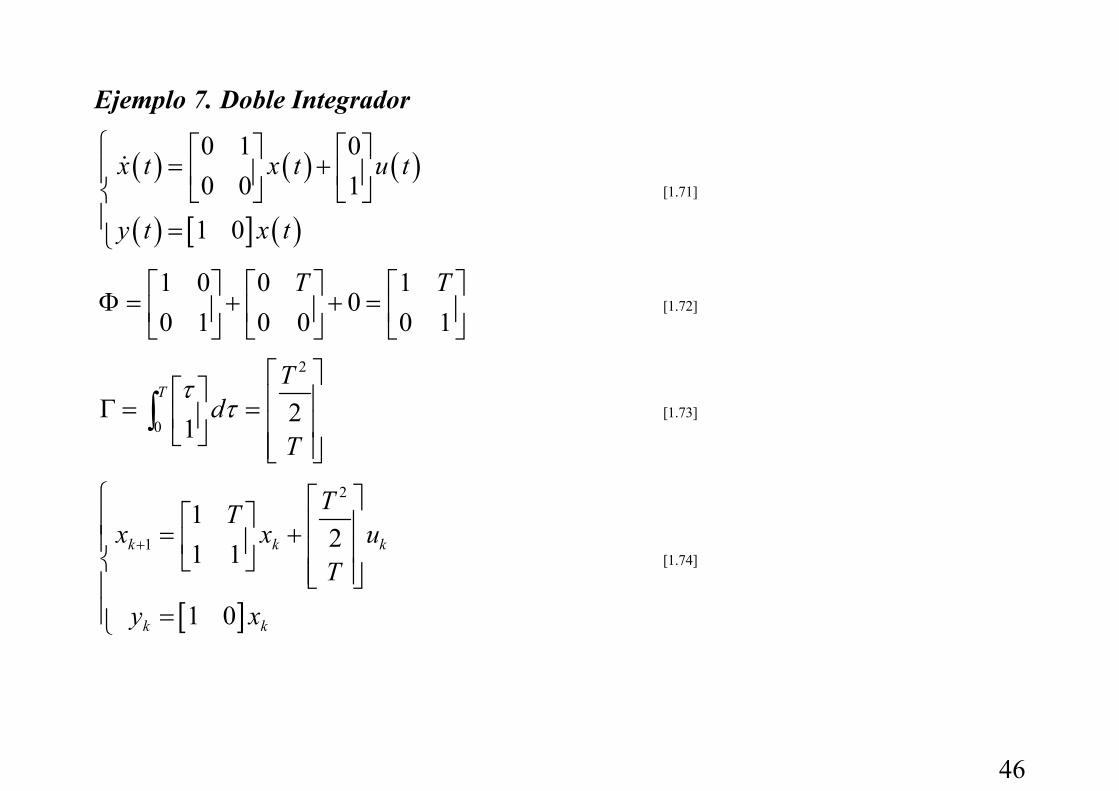
Ejemplo 7. Doble Integrador
( ) ( ) ( )
( ) [ ] ( )
0 1 00 0 1
1 0
x t x t u t
y t x t
= +
=
[1.71]
1 0 0 1
00 1 0 0 0 1
T T Φ = + + =
[1.72]
2
021
TT
dT
ττ
Γ = =
∫ [1.73]
[ ]
2
1
121 1
1 0
k k k
k k
TTx x u
T
y x
+
= +
=
[1.74]

47
Ejemplo 8. Motor
( ) ( ) ( )
( ) [ ] ( )
1 0 11 0 0
0 1
x t x t u t
y t x t
− = +
=
[1.75]
( ) ( )( )
11
1 01 0 0 11
1 11 1 111
s s ssI A
s ss ss s s
−−
+ + − = = = − ++ +
[1.76]
0
1 1
TAT
T
ee
e
−
−
Φ = = −
[1.77]
0
11 1
TT
T
e ed
e T e
τ
ττ
− −
− −
−Γ = = − − +
∫ [1.78]
48
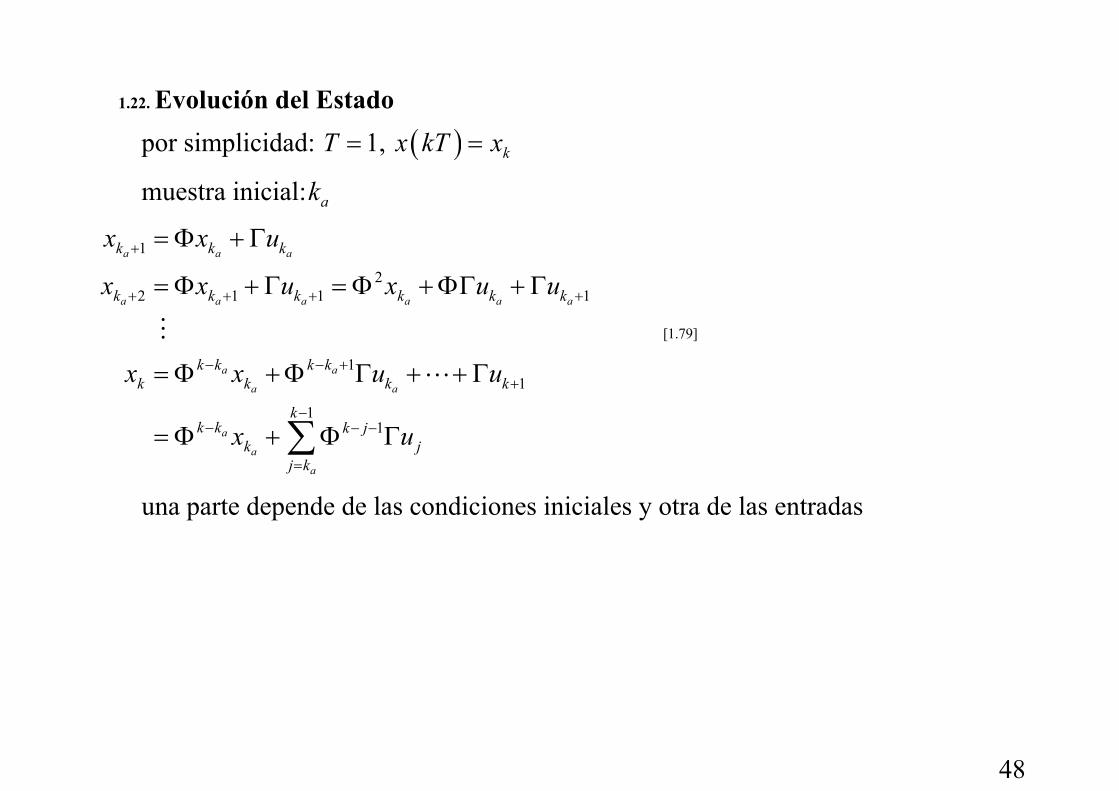
1.22. Evolución del Estado por simplicidad: 1T = , ( ) kx kT x=
muestra inicial: ak
1
22 1 1 1
11
11
a a a
a a a a a a
a a
a a
a
a
a
k k k
k k k k k k
k k k kk k k k
kk k k j
k jj k
x x u
x x u x u u
x x u u
x u
+
+ + + +
− − ++
−− − −
=
= Φ + Γ
= Φ + Γ = Φ +ΦΓ + Γ
= Φ +Φ Γ + + Γ
= Φ + Φ Γ∑
[1.79]
una parte depende de las condiciones iniciales y otra de las entradas

49
1.23. Pasaje de Discreto a Continuo El pasaje inverso no siempre tiene solución
Ejemplo 9. Sistema de primer orden 1 0,5k k kx x u+ = − + [1.80]
0,5aTe = − [1.81]
no tiene solución real El modelo discreto es más general que el continuo
0
AT
T A
e
e d Bτ τ
Φ =
Γ = ∫ [1.82]
de donde se desprende
( ) ( ) ( )
( ) ( )
d tA t t A
dtd t
t Bdt
Φ= Φ = Φ
Γ= Φ
[1.83]

50
matricialmente
( ) ( ) ( ) ( )
0 00 0A Bt t t td
dt I IΦ Γ Φ Γ
=
[1.84]
Se puede resolver esta ecuación para t=T .
( ) ( ) exp
0 00A BT T
TI
Φ Γ =
[1.85]
Si el sistema discreto no tiene autovalores reales negativos se puede calcular:
( ) ( )1 ln0 0 0A B t t
T IΦ Γ
=
[1.86]
51
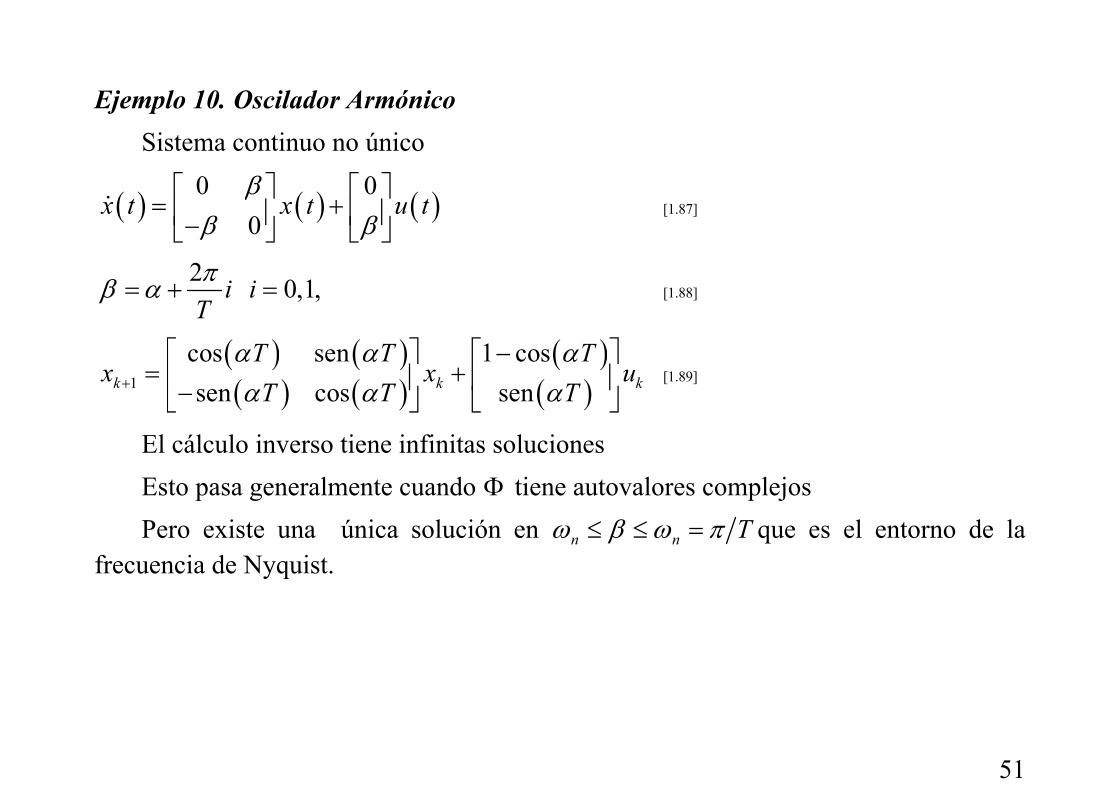
Ejemplo 10. Oscilador Armónico Sistema continuo no único
( ) ( ) ( )0 0
0x t x t u t
ββ β
= + −
[1.87]
2 0,1,i iTπβ α= + = [1.88]
( ) ( )( ) ( )
( )( )1
cos sen 1 cossen cos senk k k
T T Tx x u
T T Tα α αα α α+
− = + −
[1.89]
El cálculo inverso tiene infinitas soluciones Esto pasa generalmente cuando Φ tiene autovalores complejos Pero existe una única solución en n n Tω β ω π≤ ≤ = que es el entorno de la
frecuencia de Nyquist.
52
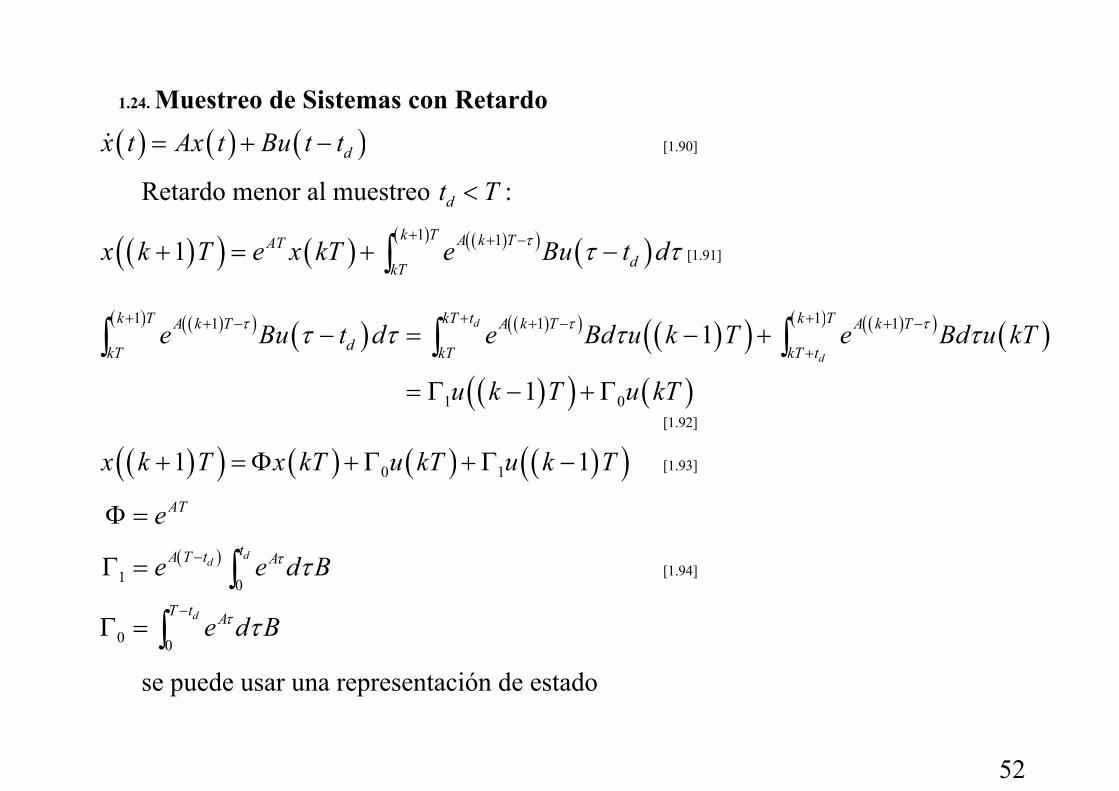
1.24. Muestreo de Sistemas con Retardo ( ) ( ) ( )dx t Ax t Bu t t= + − [1.90]
Retardo menor al muestreo dt T< :
( )( ) ( ) ( )( ) ( )( )1 11k T A k TAT
dkTx k T e x kT e Bu t dτ τ τ
+ + −+ = + −∫ [1.91]
( )( ) ( )( ) ( )( ) ( )( ) ( )( )( ) ( )
( )( ) ( )
1 11 1 1
1 0
1
1
d
d
k T kT t k TA k T A k T A k TdkT kT kT t
e Bu t d e Bd u k T e Bd u kT
u k T u kT
τ τ ττ τ τ τ+ + ++ − + − + −
+− = − +
= Γ − + Γ
∫ ∫ ∫
[1.92]
( )( ) ( ) ( ) ( )( )0 11 1x k T x kT u kT u k T+ = Φ + Γ + Γ − [1.93]
( )
1 0
0 0
dd
d
AT
tA T t A
T t A
e
e e d B
e d B
τ
τ
τ
τ
−
−
Φ =
Γ =
Γ =
∫∫
[1.94]
se puede usar una representación de estado

53
( )( )( )
( )( )( ) ( )1 01
10 0 1x k T x kT
u kTu k Tu kT
+ Φ Γ Γ = + −
[1.95]
hay r nuevas variables ( )( )1u k T−
El sistema continuo tiene dimensión infinita, en cambio el discreto no. Para almacenar el retardo es necesario guardar los valores anteriores de las
entradas.

54
Ejemplo 11. Doble Integrador con Retardo
10 1
AT Te
Φ = =
[1.96]
( ) ( )2
1 0
1 220 1
ddddtA T t ddA
d d
tt t TT te e d B
t t
τ τ− −− Γ = = =
∫ [1.97]
( )2
0 0 2d
dT t A
d
T te d B
T t
τ τ−
− Γ = =
− ∫ [1.98]
( )( )( )
( )( )
( )( )
( )
( )
2
1 2 210 1
10 0 0 1
ddd
d d
T ttT t Tx k T x kT
t T t u kTu k Tu kT
− − + = + − −
[1.99]
55
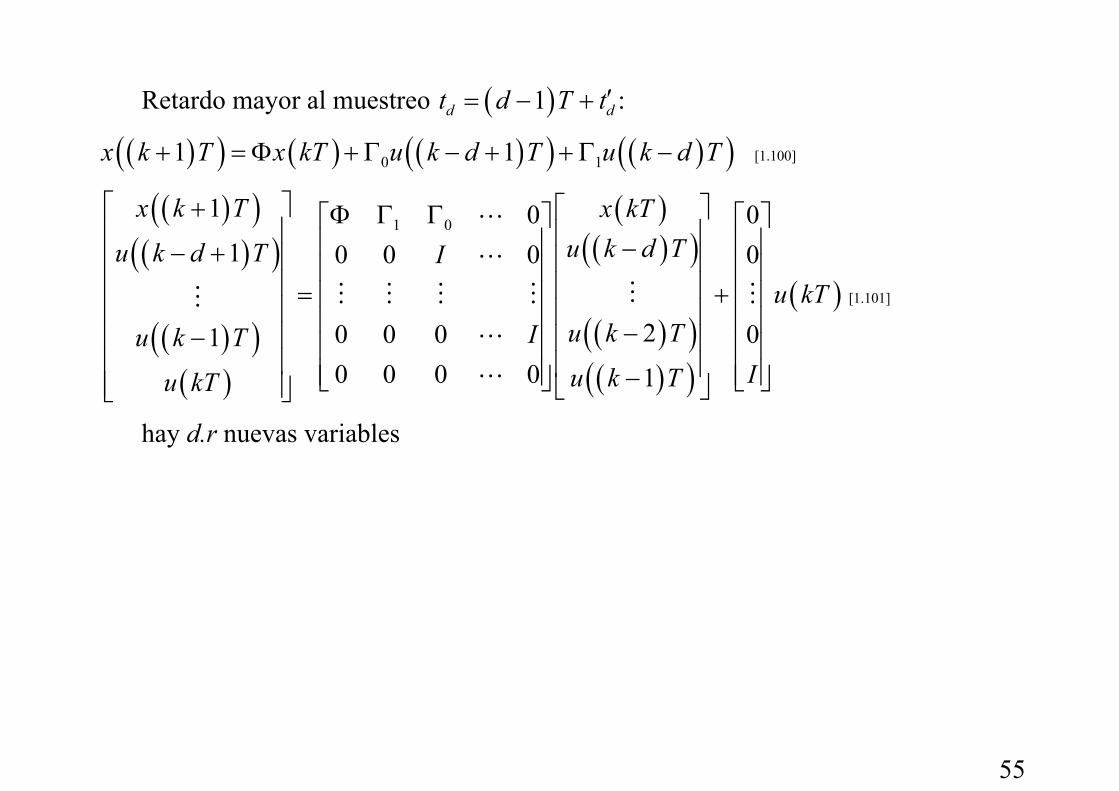
Retardo mayor al muestreo ( )1d dt d T t′= − + :
( )( ) ( ) ( )( ) ( )( )0 11 1x k T x kT u k d T u k d T+ = Φ + Γ − + + Γ − [1.100]
( )( )( )( )
( )( )( )
( )( )( )
( )( )( )( )
( )
1 01 0 0
1 0 0 0 0
20 0 0 010 0 0 0 1
x k T x kTu k d Tu k d T I
u kTu k TIu k T
Iu k Tu kT
+ Φ Γ Γ −− + = + −− −
[1.101]
hay d.r nuevas variables
56
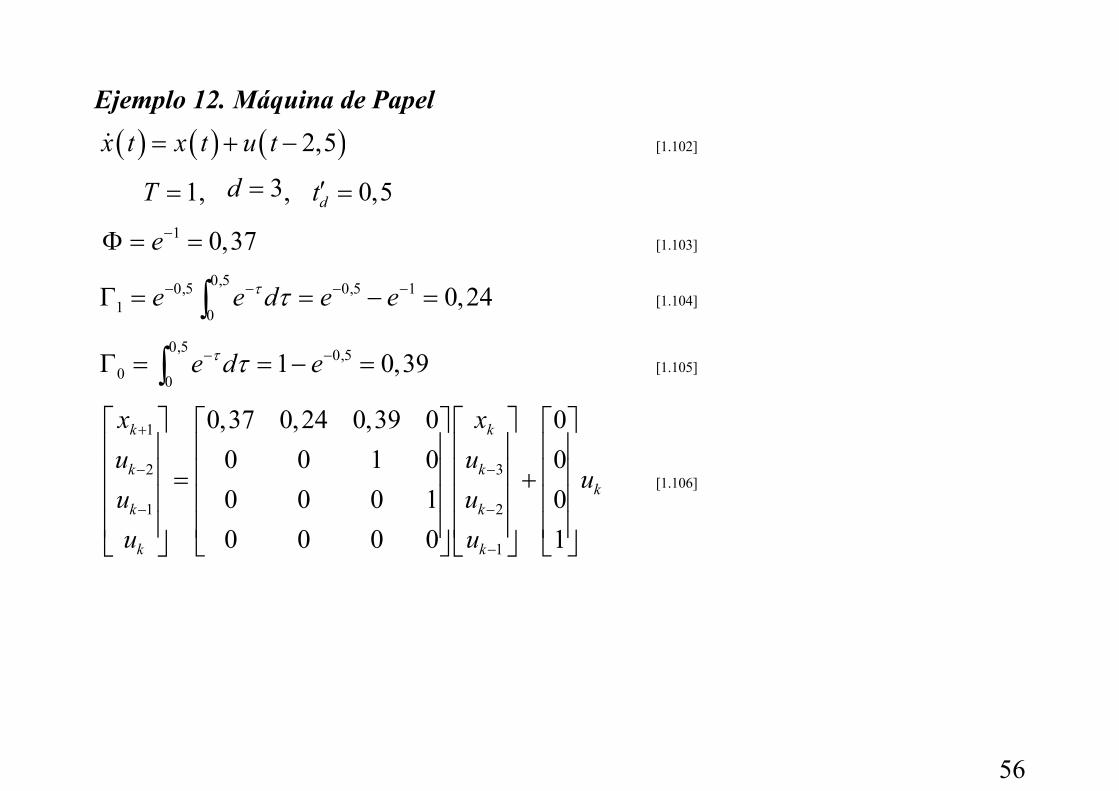
Ejemplo 12. Máquina de Papel ( ) ( ) ( )2,5x t x t u t= + − [1.102]
1T = , 3d = , 0,5dt′ =
1 0,37e−Φ = = [1.103]
0,50,5 0,5 1
1 00,24e e d e eτ τ− − − −Γ = = − =∫ [1.104]
0,5 0,5
0 01 0,39e d eτ τ− −Γ = = − =∫ [1.105]
1
2 3
1 2
1
0,37 0,24 0,39 0 00 0 1 0 00 0 0 1 00 0 0 0 1
k k
k kk
k k
k k
x xu u
uu uu u
+
− −
− −
−
= +
[1.106]
57
1.25. Variables de Estados con Otro Bloqueador El BOC es el más barato y más común En sistemas hidráulicos no se usa porque genera cambios bruscos de presión. Cambios en el bloqueador implican cambios en Γ , no en Φ

58
Ejemplo 13. Doble Integrador con Bloqueador Diferente
Bloqueador
0
uk
T/2T
αuk
βuk
10 1
AT Te
Φ = =
[1.107]
( ) ( )
2 22
0 2
312 4 4
T TA T A TT
T Te Bd e Bd
T Tτ τ α β
α τ β τα β
− − +Γ = + = +
∫ ∫ [1.108]
( )2
0 0 2d
dT t A
d
T te d B
T t
τ τ−
− Γ = =
− ∫ [1.109]

59
1.26. Modelos de Entrada Salida Modelo interno: Variables de estado Modelo Externo: Función de Transferencia (Entrada Salida) Como en los sistemas continuos, los discretos pueden expresarse en base a la
respuesta impulsional. 1.27. Respuesta Impulsional
Entrada y salida de un sistema discreto son secuencias de números que, en un intervalo finito de muestras, serán secuencias finitas.
Expresadas en forma de vectores resultan
[ ][ ]
0 1
0 1
TN
TN
U u u
Y y y−
−
=
= [1.110]
Un modelo lineal que relacione salida con entrada se puede escribir 0Y HU Y= + [1.111]
siendo H una matriz de N N× e 0Y las condiciones iniciales.

60
si Y es causal, H es triangular inferior En este caso
( ) 00
,k
k m km
y h k m u y=
= +∑ [1.112]
h es la respuesta impulsional, función de peso o secuencia de ponderación Es fácil medir inyectando una entrada de amplitud 1 y duración una muestra.
Para más de una entrada h es una matriz Para sistemas invariantes en el tiempo
( ) ( ),h k m h k m= − [1.113]
Se puede calcular h a partir de variables de estado [1.114]
Para un impulso
1
0 11k k
kh
C k−
<= Φ Γ ≥
[1.115]
La respuesta impulsional no varía con transformaciones
61
( ) ( )
( )
11 1 1
1 1 1 1
kkk
k kk
h C CT T T T
CT T T T C h
−− − −
− − − −
= Φ Γ = Φ Γ
= Φ Γ = Φ Γ = [1.116]
62
1.28. Operador Desplazamiento
Es el equivalente discreto al operador diferencial dp dt=
La secuencia debe ir desde −∞ a +∞ El muestreo es 1T =
- Operador Adelanto 1k kqf f += [1.117]
Norma sup k
kf f= [1.118]
o
2 2
kk
f f∞
=−∞
= ∑ [1.119]
el operador desplazamiento tiene norma 1

63
- Operador Retardo
1
1k kq f f−−= [1.120]
Para análisis de estabilidad conviene Operador Adelanto Para causalidad, Retardo Las operaciones con ecuaciones en diferencias se reducen a operaciones
algebraicas Es fácil confundirlo con la Transformada en Z así como se confunde s con p. No son exactamente iguales. Es útil para manejar ecuaciones en diferencias grandes. Sea el sistema
1 1 0a a a b bk n k n n k k n n k
a b
y a y a y b u b u
n n+ + − ++ + + = + +
> [1.121]
( ) ( )1 11 0 1
a a b b
a b
n n n nn k n kq a q a y b q b q b u− −+ + + = + + + [1.122]
64
( )( )
11
10 1
a a
a
b b
b
n nn
n nn
A q q a q a
B q b q b q b
−
−
= + + +
= + + + [1.123]
( ) ( )k kA q y B q u= [1.124]
expresado en función del operador retardo 1 1 0a a b bk k n k n k d n k d ny a y a y b u b u− − − − −+ + + = + + [1.125]
con a bd n n= − exceso de polos
polinomio recíproco
( ) ( )1* 111 a a a
a
n n nnA q a q a q q A q− −= + + + = [1.126]
[1.125] se puede escribir
( ) ( )* 1 * 1k k dA q y B q u− −
−= [1.127]
Cuidado: **A no necesariamente es A, por ejemplo

65
( )( )( )
* 1
**
1
1
A q q
A q qq
A q
−
=
= =
=
[1.128]
- Propiedades Multiplicación: funciona División: no siempre
Ejemplo 14. División con Operador Desplazamiento
( )1 1k k k
k k
y ay u a
q a y u+ − = <
− = [1.129]
valor inicial 0y
11 1
0 00 1
k kk k j k j
k j k jj j
y a y a u a y a u−
− − −−
= =
= + = +∑ ∑ [1.130]
Si la división funciona, se puede escribir

66
1
1
11k k k
qy u uq a aq
−
−= =− −
[1.131]
Esto es la convergencia de la serie
( )1 1 2 2 1
1
1 jk k k j
j
y q aq a q u a u∞
− − − −−
=
= + + + = ∑ [1.132]
[1.132] y [1.130] excepto que las entradas y salidas sean nulas para instantes negativos

67
1.29. Función de Transferencia 1k k k kx qx x u+ = = Φ + Γ [1.133]
( ) k kqI x u−Φ = Γ [1.134]
( ) 1k k k ky Cx Du C qI D u−= + = −Φ Γ+ [1.135]
Función de Transferencia
( ) ( ) 1H q C qI D−= −Φ Γ + [1.136]
expresada en operador retardo
( ) ( ) ( )1* 1 1 1H q C I q q D H q−− − −= − Φ Γ + = [1.137]
Para sistemas UEUS (SISO)
( ) ( ) ( )( )
1 B qH q C qI D
A q−= −Φ Γ + = [1.138]
Si el sistema es de orden n, y A y B no tiene factores comunes, A es de grado n

68
A es el polinomio característico del sistema lo que implica que el sistema se puede escribir: 1 1 0a a b bk k n k n k d n k d ny a y a y b u b u− − − − −+ + + = + + [1.139]
generalmente 0 0b =
Ejemplo 15. Función de Transferencia del Doble Integrador
( ) [ ] ( )( )
( )
1
2
1 2
1 2
1 1 0,5 0,5 11 0
0 1 1 1
0,51 2
q qH q
q q
q qq q
−
− −
− −
− − + = = − −
+=
− +
[1.140]

69
Ejemplo 16. Función de Transferencia del Doble Integrador con Retardo 0,5dt seg=
( ) ( ) ( )
[ ]( )( )
( )( )
1 10 1
1
2 1
2 1 2 3
2 1 22
1 1 0,125 0,37511 00 1 0,5 0,51
0,125 6 1 0,125 61 22 1
H q C qI q
q qq qq
q q q q qq qq q q
− −
−
−
− − −
− −
= −Φ Γ + Γ
− + = − +−
+ + + += =
− +− +
[1.141]
Ejemplo 17. Sistema en Forma Canónica Observable
[ ]
1 11
2 2
10
1 0
k k k
k k
a bx x u
a b
y x
+
− = + − =
[1.142]
( ) [ ]1
1 1 1 22
2 2 1 2
11 0
q a b b q bH qa q b q a q a
−+ += = + +
[1.143]
70
- Polos y Ceros Polos: raíces del denominador de H Ceros: raíces del numerador de H
- Orden del Sistema cantidad de estados o cantidad de polos

71
- Algunas Funciones de Transferencia Equivalencia entre la función de transferencia continua y el sistema muestreado
con bloqueador de orden cero
( ) ( )( )
S sG s
E s= ( ) ( )
( )1 2
21 2
S q b q bG qE q q a q a
+= =
+ + resp. impulsional ( )g t respuesta al
escalón
1 1 ( )tδ
1s
1T
q − 1
Time (sec.)
Am
plitu
de
Step Response
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4From: U(1)
To: Y
(1)
2
1s
( )( )
2
2
12 1T q
q+
− t
Time (sec.)
Am
plitu
de
Step Response
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5From: U(1)
To: Y
(1)
sTe− 1q− retardo
as a+
1 aT
aT
eq e
−
−
−−
aTe− Time (sec.)
Am
plitu
de
Step Response
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1From: U(1)
To: Y
(1)

72
( )a
s s a+ ( ) ( )
( )2
1 11 1
1
aT aT aT
aT aT
aT e q e aTea a
q e q e
− − −
− −
− + + − −
− + + ( )1 1 aTe
a−−
Time (sec.)
Am
plitu
de
Step Response
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
10From: U(1)
To: Y
(1)
( ) ( )ab
s a s b+ +
( ) ( ) ( ) ( )
( ) ( )2
1 1 1 1aT bT bT aT aT bT
a b TaT bT
b e a e a e e b e eq
b a b a
q e e q e
− − − − − −
− +− −
− − − − − −+
− − − + +
( )bT aTab be aeb a
− −−−
Time (sec.)
Am
plitu
de
Step Response
0 1 2 3 4 5 60
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5From: U(1)
To: Y
(1)
( ) ( )s c
s a s b+
+ +
( ) ( )( )
( ) ( )
( ) ( )2
1 1bT aTbT aT
a b T aT bT
a b TaT bT
c e c ee e c b c c ab a q e e e
b a ab b a b a a b
q e e q e
− −− −
− + − −
− +− −
− −− + − − − + + +
− − −
− + +
( ) ( )( )1 bT aTb c e a c eb a
− −− − −−
Time (sec.)
Am
plitu
de
Step Response
0 5 10 15 20 25 30-0.2
0
0.2
0.4
0.6
0.8
1
1.2From: U(1)
To: Y
(1)
20
2 20 02s
ωζω ω+ +
( ) ( )
( ) ( )( )
0
0 0
0
0
2 201 0 02
0
2 2 202 0 02
0
21 0
22
1 cos 1 sen 11
sen 1 cos 11
2 cos 1
T
T T
T
T
b e T T
b e e T T
a e T
a e
ζω
ζω ζω
ζω
ζω
ζωω ζ ω ζω ζ
ζω ω ζ ω ζω ζ
ω ζ
−
− −
−
−
= − − + − −
= + − − −
−
= − −
=
( )0 2002
sen 11
te tζωω ω ζζ
− −−
Time (sec.)
Am
plitu
de
Step Response
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4From: U(1)
To: Y
(1)
73
2 20 02
ss ζω ω+ +
( )
( )
0
0
0
21 02
0
2 1
21 0
22
1 sen 11
2 cos 1
T
T
T
b e T
b b
a e T
a e
ζω
ζω
ζω
ω ζω ζ
ω ζ
−
−
−
= −−
= −
= − −
=
( )0 2
02
21
1 sen 11
1tan
te tζω ω ζ φζ
ζφ
ζ
−
−
− − −−
−=
Time (sec.)
Am
plitu
de
Step Response
0 5 10 15 20-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7From: U(1)
To: Y
(1)
74
1.29.1. Función de Transferencia en Transformada Z Ejemplo 18. Rampa ky kT= [1.144]
( )( )
1 2 220 2
1TzY z Tz T z
z− −= + + + =
− [1.145]
Usando Variables de Estado
1k k k
k k
x x uy Cx+ = Φ + Γ=
[1.146]
aplicando Transformada en Z
1 00 0 0 0
k k k kk k k k
k k k k
z x z z x x z x z u∞ ∞ ∞ ∞
− − − −+
= = = =
= − = Φ + Γ
∑ ∑ ∑ ∑ [1.147]
( )( ) ( ) ( )0z X z x X z U z− = Φ + Γ [1.148]
( ) ( ) ( )10X z zI zx U z−= −Φ + Γ [1.149]
75
( ) ( ) ( ) ( )1 10Y z C zI zx C zI U z− −= −Φ + −Φ Γ [1.150]
donde
( ) ( ) 1H z C zI −= −Φ Γ [1.151]
1.29.2. Discretización de la Función de Transferencia Conociendo ( )G s ¿Cómo calcular ( )H z ?
Sistema con BOC La respuesta al escalón de un sistema es
( ) ( )G sY s
s= [1.152]
La Transformada en Z de la respuesta al escalón es
( ) ( ) ( )( )( )1Y z Z y Z L Y s−= = [1.153]
Para obtener la Función de Transferencia se divide por la Transformada en Z de la entrada, el escalón en este caso.
( ) ( ) ( )11H z z Y z−= − [1.154]
76
Pasos
1- Antitransformar ( )G ss
2- Calcular la Transformada en Z (de una tabla)
3- Multiplicar por ( )11 z−−

77
- Tabla de Transformadas en Z La siguiente Tabla muestra algunas Transformadas en Z. Cuidado: aplicarla de
acuerdo al procedimiento anterior.
f ( )L f ( )Z f
1(escalón) 1s
1
zz −
kT 2
1s
( )21Tz
z −
( )212
kT 3
1s
( )
( )
2
3
12 1
T z zz
+
−
kT
e τ−
1 sττ+
Tz
z e τ−
−

78
1kT
e τ−
− ( )1
1s sτ+
( )
1
1
T
T
z e
z z e
τ
τ
−
−
−
− −
( )sen kTω 2 2sωω+
( )( )( )2
sen2 cos 1z T
z z Tωω− +
La fórmula general es:
( ) ( )1 1Rei
ii
s T
s Ts
eH z s G sz e s
−= − ∑ [1.155]
donde is son los polos de ( )G s
79
Ejemplo 19. Motor Controlado Por Armadura
1 i
e e
p(t) = (t) (t)k i (t) = (t)k i
φφ
[1.156]
1 e e i
p i
p(t) = (t) (t)k k i ip(t) = (t)k i
[1.157]
f.c.e.m
m b m bd (t)(t) = (t) = u k k dtθ
ω [1.158]
circuito de armadura
ii ii i m
d (t)i(t) = (t) + + (t)u i ur L dt [1.159]
( )i i ii b(s) = + s (s) + s (s)U kr L I Θ [1.160]
carga: 2
m 2
(t) d (t)d(t) = J + B pdtdt
θ θ [1.161]
80
o sea
( )2ip (s) = J + s B (s)k sI Θ [1.162]
Función de Transferencia
( ) ( )p
2i i i i i b p
(s) kG(s) = = (s) s J + J + B s + B + U s k kL r L r
Θ
[1.163]
para 0iL ≈
( )M
Mi
(s) KG(s) = = (s) s 1 + s U T
Θ [1.164]
con
pM
i b p
k = K B + k kr [1.165]
iM
i b p
Jr = T B + k kr [1.166]
Discretización con Bloqueador de orden 0:
81
( )
M
M M
M
M
KK TG(s)
1s 1 + s T s + s T
= =
[1.167]
Función de Transferencia Discreta:
( ) ( ) ( )( )
M
-1 -1 MsT -1
G(s) G(s) 2 sT -1polos poloss s
M
KG(s) TG(z) = 1 - Res = 1 - Res z z 1s 1 - e z + s 1 - s e z
T
∑ ∑
[1.168]
Cálculo de los residuos:
ReMM
MMT1 - -1- TT
k Ts = 1 - e z
[1.169]

82
( ) ( ) ( ) ( )0
0
Re
M M M sT -1
M M M2
2sT sT-1 -10 sT -1
M MM
K K K- - T e z1 d T T Ts 1 1 2 - 1 ! ds 1 + s 1 - + s 1 - e ez z + s 1 - e zT TT
= = +
[1.170]
finalmente
( )( )
( ) ( ) ( ) ( )( ) ( )
M M
M
T T2 - --1 -1 -1 -1 -1T TM M M-1
M M-1M 2 TsT -1 -1 -1 - -1 -1
T
1 - - 1 - 1 - + T 1 - e eK T z T z z z zT T T zG(z) = 1 - - + z K 1 - 1 - e z z 1 - z 1 - 1 - e z z
=
[1.171]
( )( )( ) ( )
M M
M
T T- --1 -1T TM M M M M
T- -1 -1T
T - + + - T + e eK z T T T T zG(z) =
1 - 1 - e z z
[1.172]
83
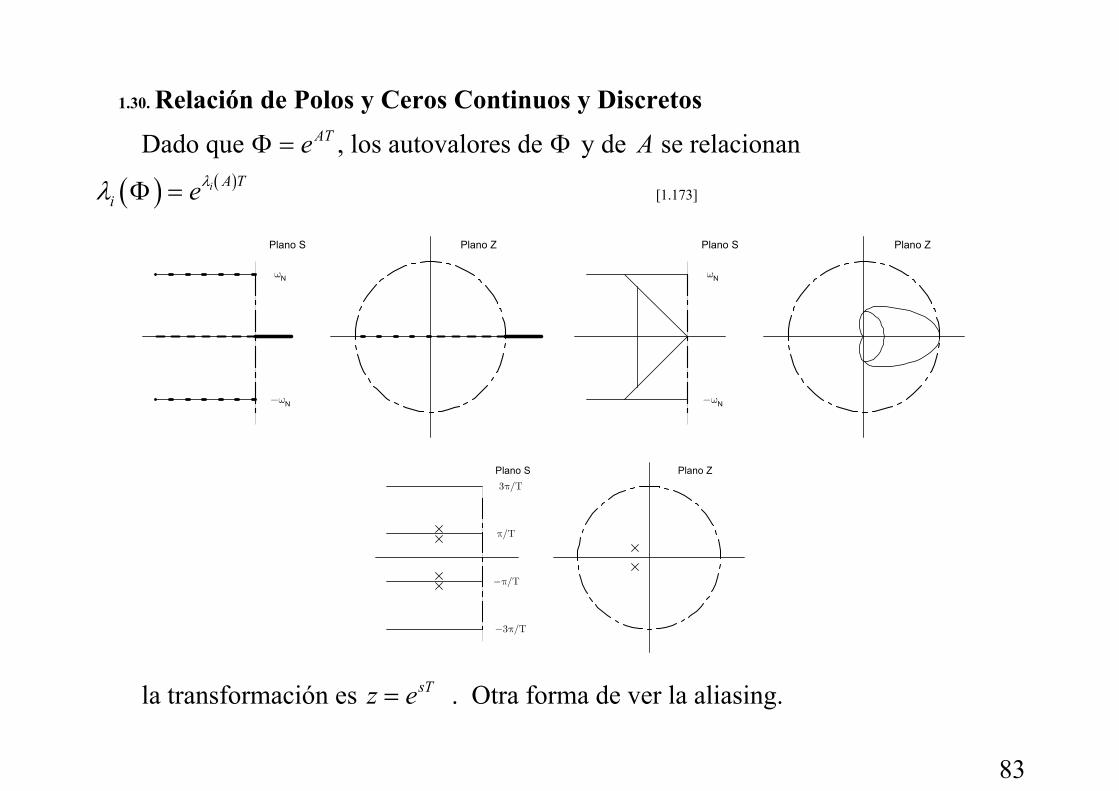
1.30. Relación de Polos y Ceros Continuos y Discretos
Dado que ATeΦ = , los autovalores de Φ y de A se relacionan
( ) ( )i A Ti eλλ Φ = [1.173]
Plano S Plano Z
ωN
−ωN
Plano S Plano Z
ωN
−ωN
Plano S Plano Z
π/Τ
−π/Τ
3π/Τ
−3π/Τ
la transformación es sTz e= . Otra forma de ver la aliasing.

84
Ejemplo 20. Sistema de Segundo Orden 20
2 20 02s
ωζω ω+ +
[1.174]
los polos en Z son las raíces de 2
1 2 0z a z a+ + = [1.175]
con
( )0
0
21 0
22
2 cos 1T
T
a e T
a e
ζω
ζω
ω ζ−
−
= − −
= [1.176]
los polos varían con T
- Ceros Es más difícil relacionar los ceros continuos con los discretos Para pequeños períodos de muestreo se cumple
isiz e≈ [1.177]
El sistema continuo tiene 1d r= − ceros en infinito donde r es el exceso de polos.
85
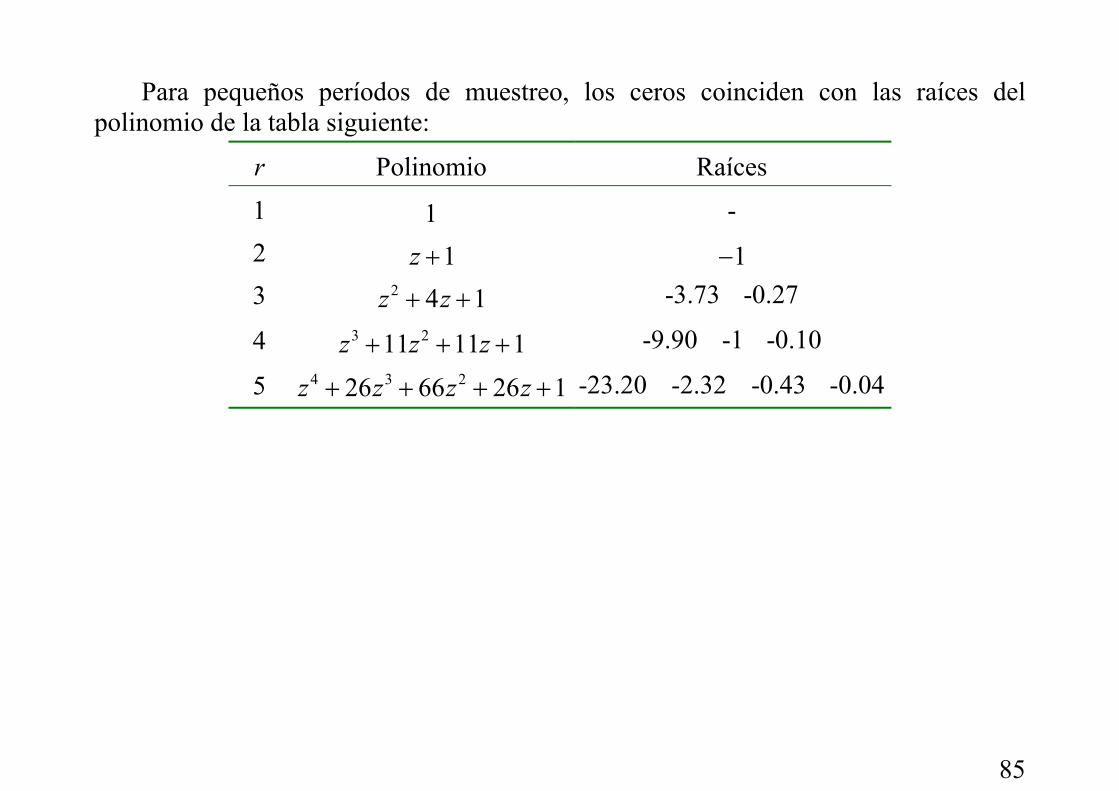
Para pequeños períodos de muestreo, los ceros coinciden con las raíces del polinomio de la tabla siguiente:
r Polinomio Raíces 1 1 - 2 1z + 1− 3 2 4 1z z+ + -3.73 -0.27
4 3 211 11 1z z z+ + + -9.90 -1 -0.10
5 4 3 226 66 26 1z z z z+ + + + -23.20 -2.32 -0.43 -0.04
86
Ejemplo 21. Sistema continuo sin Ceros
( )( )2
1 2s s+ + [1.178]
discretizando el cero se ubica
( ) ( )( ) ( )2 2
2
1 2 1
2 1 1
T T T T
T T
e e e ez
e e
− − − −
− −
− − −=
− − − [1.179]
cuando el período de muestreo se hace pequeño 1 3z T≈ − + [1.180]
De acuerdo a la tabla 2r = 1 0rZ z= + = [1.181]

87
1.31. Sistemas con Función de Transferencia Inversa Inestable Un sistema continuo con función de transferencia racional y con ceros en el
semiplano positivo es llamado de fase no mínima. Lo mismo pasa con los sistemas discretos con ceros fuera del círculo unidad. El retardo no hace que los sistemas discretos sean de fase no mínima. Es por eso que se habla de sistemas con función de transferencia inversa inestable Un sistema continuo con inversa estable puede transformarse en discreto con
inversa inestable o viceversa.

88
Ejemplo 22. Sistema Continuo con Inversa Inestable
( ) ( )( )( )
6 12 3
sG s
s s−
=+ +
[1.182]
discretizando el cero se ubica 2 3 5
2 3
8 91 9 8
T T T
T T
e e eze e
− − −
− −
− += −
− + [1.183]
para 1,25T ≈ , 1z ≈ − y para período de muestreo mayores la inversa es siempre estable.
89
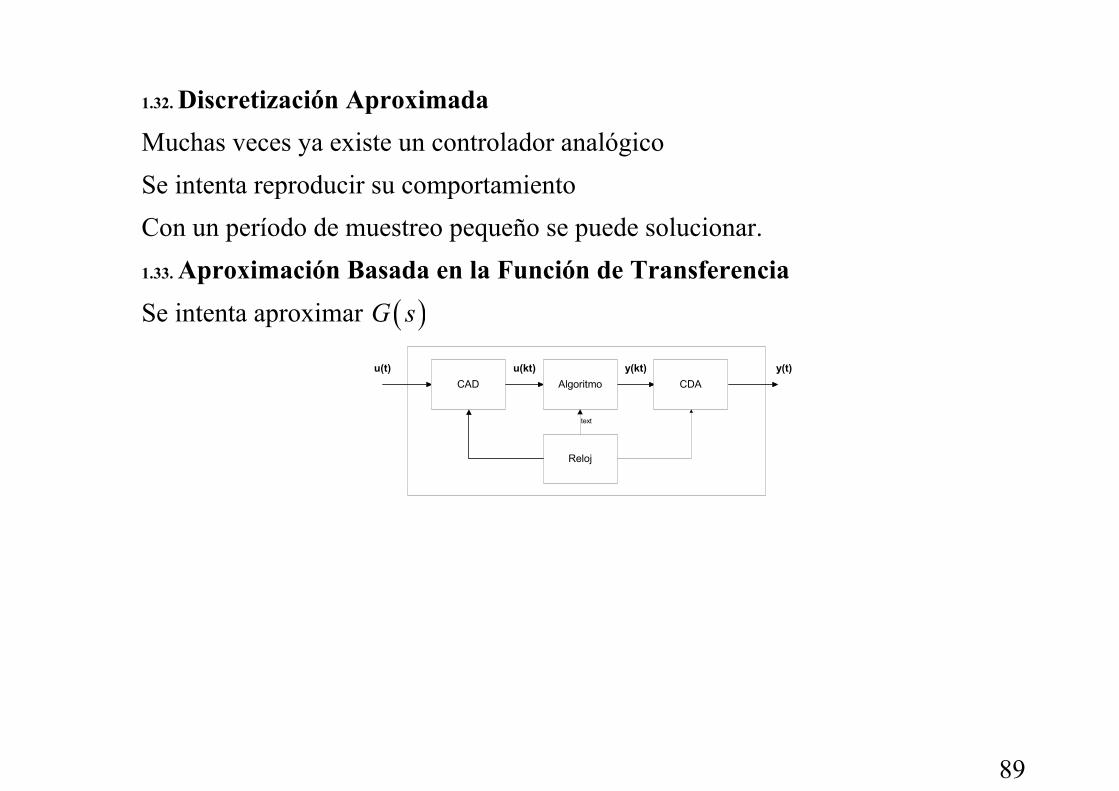
1.32. Discretización Aproximada Muchas veces ya existe un controlador analógico Se intenta reproducir su comportamiento Con un período de muestreo pequeño se puede solucionar. 1.33. Aproximación Basada en la Función de Transferencia Se intenta aproximar ( )G s
Reloj
u(t)CDAAlgoritmoCAD
u(kt) y(kt) y(t)
text
90
1.1.1. Aproximación de Tustin aproximación de derivada como una diferencia en adelanto (método de Euler)
( ) ( ) ( ) ( )1dx t x t T x t qpx x tdt T T
+ − −= ≈ = [1.184]
como una diferencia hacia atrás
( ) ( ) ( ) ( )1dx t x t x t T qpx x tdt T qT
− − −= ≈ = [1.185]
en transformadas significa reemplazar 1zs
T−
= o 1zs
zT−
= [1.186]
que corresponden a un desarrollo en serie truncado Para el método de Euler
1sTz e sT= ≈ + [1.187]
para la diferencia hacia atrás

91
11
sTz esT
= ≈−
[1.188]
Otra aproximación: el método trapezoidal o método de Tustin
12
12
sT
sT
z e sT
+= ≈
− [1.189]
Se reemplaza directamente s por alguna de sus aproximaciones: Euler
1zsT−′ = [1.190]
diferencia hacia atrás 1zs
zT−′ = [1.191]
Tustin o bilineal
92
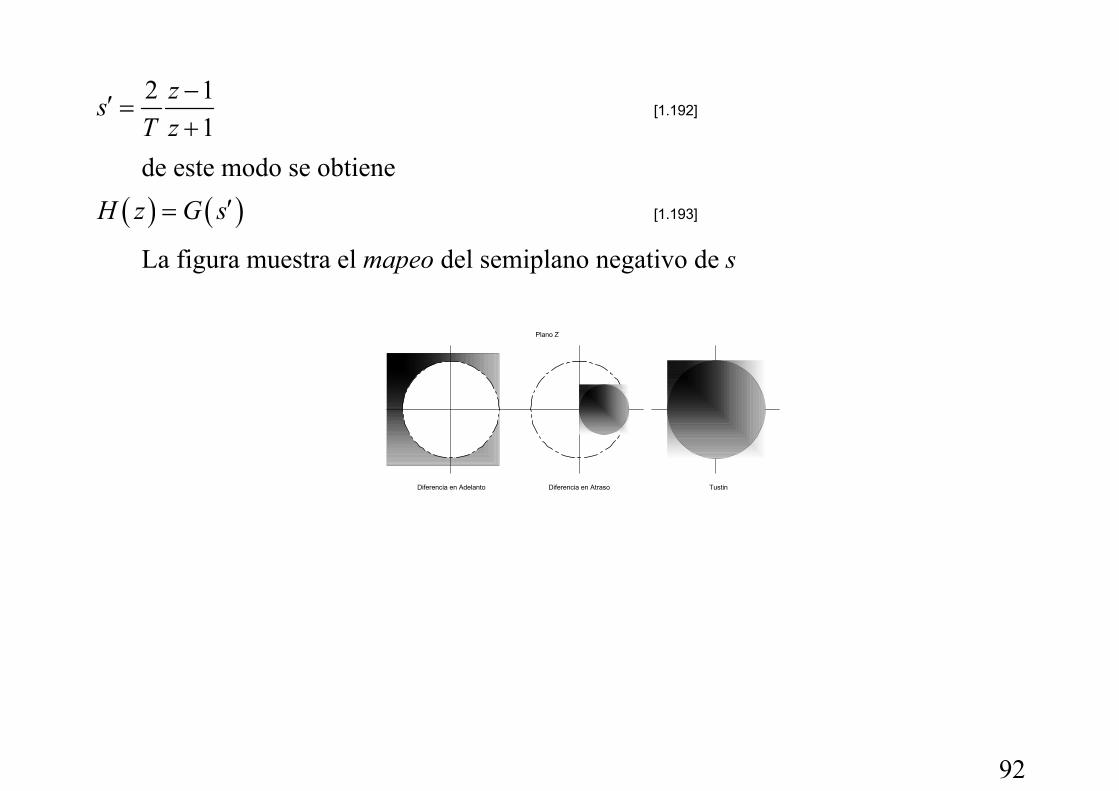
2 11
zsT z
−′ =+
[1.192]
de este modo se obtiene
( ) ( )H z G s′= [1.193]
La figura muestra el mapeo del semiplano negativo de s
Plano Z
Diferencia en Adelanto Diferencia en Atraso Tustin
93
1.34. Elección del Período de Muestreo Recordar: sistema muestreado es más deficiente que el continuo. La elección del período de muestreo depende: comportamiento requerido dinámica propia del sistema perturbaciones actuadores sensores cómo fue modelado Período de muestreo muy grande
imposibilita la reconstrucción Mucho tiempo en lazo abierto
Período de Muestreo muy corto Incrementa la carga del computador Introduce errores numéricos

94
Si el sistema tiene retardo 1 1
4 8 dT t≈ − [1.194]
Una buena medida es expresar el muestreo en función del tiempo de crecimiento rT introduciendo
rr
TNT
= [1.195]
es el número de muestras en el tiempo de crecimiento. Para una senoide pura, de acuerdo al teorema de Shannon, 0,32rN ≈
Este es el límite inferior, pero la reconstrucción de Shannon es complicada Para un sistema de primer orden, el tiempo de crecimiento es la constante de
tiempo. Suena lógico elegir 2 4rN ≈ −
Para un sistema de segundo orden, el tiempo de crecimiento es
tan
0
1rT e
ϕϕ
ω= cosξ ϕ= [1.196]
95
También se elige 2 4rN ≈ −
Dependiendo del tipo de proceso Caudal 1seg Presión 5 seg Nivel 10 seg Temperatura 20 seg

96
1.35. Referencias 1. Äström, Karl J.: Computer Controlled Systems. Theory and Design, Prentice Hall –
1984 2. Aracil Santonja, R.: Sistemas Discretos de Control, Universidad Politécnica de
Madrid – 1980 3. Isermann, R.: Digital Control Systems, Springer Verlag – 1981 4. Papoulis, A: Sistemas Digitales y Analógicos, Marcombo – 1978 5. Kuo, B: Discrete Data Control Systems, Prentice Hall – 1970 6. Tou, : Digital and Sampled Data Control Systems, Mac Graw Hill – 1959 7. Proakis, J.G. & Manolakis, D.G.: Tratamiento Digital de Señales: Principios,
Algoritmos y Aplicaciones, Traducción de Digital Signal Processing: Principles, Algorithms and Applications, 3rd. edition, Prentice Hall, Englewood Cliffs, UK., 1998.
Top Related